
位置検出センサ、これを備えたクラッチアクチュエータ、およびこれを備えたクラッチ装置
【課題】被位置検出部材の直線移動が大きい場合にも磁界発生部材による位置検出をより正確に検出しつつ、コストを安くすることのできる位置検出センサを提供する。
【解決手段】位置検出センサ1の磁界発生部材3は、被位置検出部材2の直線移動方向の長さが所定長さで磁石により磁化される例えば鉄等の軟磁性体3aと、同じ大きさの一対の磁石3b,3cとを有する。一対の磁石3b,3cは、それぞれ、軟磁性体3aの両端に被位置検出部材2の直線移動方向に直線状に接合されている。すなわち、磁石3b,3c
と軟磁性体3aは被位置検出部材2の直線移動方向に交互に配設される。これにより、被位置検出部材2の直線移動方向の磁界発生部材3の長さLは、従来の磁界発生部材3の長さより長く設定される。
【解決手段】位置検出センサ1の磁界発生部材3は、被位置検出部材2の直線移動方向の長さが所定長さで磁石により磁化される例えば鉄等の軟磁性体3aと、同じ大きさの一対の磁石3b,3cとを有する。一対の磁石3b,3cは、それぞれ、軟磁性体3aの両端に被位置検出部材2の直線移動方向に直線状に接合されている。すなわち、磁石3b,3c
と軟磁性体3aは被位置検出部材2の直線移動方向に交互に配設される。これにより、被位置検出部材2の直線移動方向の磁界発生部材3の長さLは、従来の磁界発生部材3の長さより長く設定される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被位置検出部材の直線状の移動に応じて直線状に移動するとともに磁界を発生する磁界発生部材の磁界の変化を検出することで、被位置検出部材の位置を検出する位置検出センサの技術分野、この位置検出センサを備えたクラッチアクチュエータの技術分野、およびクラッチアクチュエータを備えたクラッチ装置の技術分野に関するものである。
【背景技術】
【0002】
従来、車両のクラッチ制御やチェンジレバー制御等の種々の制御には、磁気センサを用い、被位置検出部材の直線状の移動に応じて直線移動するとともに磁界を発生する磁界発生部材の磁界の変化を磁界検出部で検出することで、被位置検出部材の位置を検出する位置検出センサが多々用いられている。このような位置検出センサとして、被位置検出部材であるチェンジレバーの移動に応じて直線移動するシャフトに磁界発生部材であるマグネットを設けるとともに、シャフトの移動とともに移動するマグネットの磁界の変化を磁界検出部で検出することで、チェンジレバーの位置を検出する位置検出センサが知られている(例えば、特許文献1参照)。
【0003】
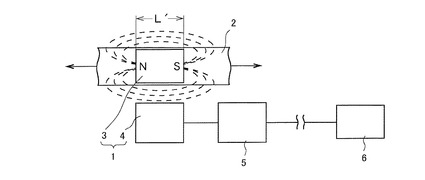
図6は、従来のこのような磁気センサを用いた位置検出センサを模式的に示す図である。図6中、1は位置検出センサ、2は図6において位置が検出される直線状に移動可能な被位置検出部材、3は被位置検出部材2に設けられた磁石を有する磁界発生部材、4は磁界発生部材3の磁石の磁界を検出して電気信号に変換する、例えばホール素子やコイル等の磁界検出部、5は磁界検出部4で検出した磁界の変化の電気信号を読み出す信号読出部、6は信号読出部5からの電気信号が入力される電子制御装置(ECU)である。その場合、位置検出センサ1は磁界発生部材3および磁界検出部4から構成される。
【0004】
このような位置検出センサ1においては、被位置検出部材2が図6において左右方向に直線移動すると、磁界発生部材3も被位置検出部材2と同方向に一体に直線移動する。この磁界発生部材3の移動により、磁界検出部4が検出する磁界発生部材3の磁界が変化する。磁界検出部4は検出した磁界発生部材3の磁界の変化を検出して電圧の変化等の電気信号に変換する。そして、信号読出部5が信号読出部磁界検出部4で検出した磁界の変化の電気信号を読み出して、例えば電子制御装置(ECU)6に送出する。ECU6は、信号読出部5からの磁界の変化の電気信号に基づいて被位置検出部材2の位置を判断する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−99258号公報。
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、近年、従来の被位置検出部材2の移動量に比べてかなり大きい移動量の被位置検出部材2の位置を検出することが求められる場合がある。しかし、このような場合従来の位置検出センサ1では、被位置検出部材2の直線移動方向の磁界発生部材3の長さL′が大きな被位置検出部材2の移動量に対して短いため、被位置検出部材2の位置を正確に検出することが難しいという問題がある。
【0007】
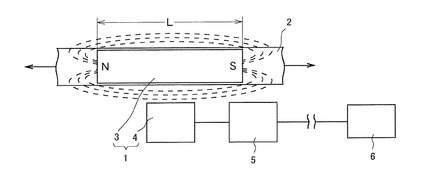
そこで、図7に示すように被位置検出部材2の直線移動方向の磁界発生部材3の磁石の
長さLを従来の磁石に比べて単純に長くすることが考えられる。しかしながら、磁石は比較的高価であるため、磁界発生部材3の磁石の長さLを単純に長くしたのでは、磁石の体積が増加して位置検出センサ1のコストが高くなるという別の問題が生じる。
【0008】
本発明はこのような事情に鑑みてなされたものであって、その目的は、被位置検出部材の直線移動が大きい場合にも磁界発生部材による位置検出をより正確に検出しながら、しかもコストを安くすることのできる位置検出センサを提供することである。
本発明の他の目的は、本発明の位置検出センサを備えることで動力伝達制御をより正確に行うことのできるクラッチアクチュエータ、およびこれを備えたクラッチ装置を提供することである。
【課題を解決するための手段】
【0009】
前述の課題を解決するために、本発明に係る位置検出センサは、位置が検出される被位置検出部材の直線移動に応じて直線移動するとともに磁界を発生する磁界発生部材と、前記磁界発生部材の磁界を検出する磁界検出部とを少なくとも有し、前記被位置検出部材の直線移動により前記磁界発生部材が直線移動するとき、前記磁界検出部で前記磁界の変化を検出することで、前記被位置検出部材の位置を検出する位置検出センサにおいて、前記磁界発生部材が、予め定められた第1の所定数の磁石と予め定められた第2の所定数の軟磁性体とが前記被位置検出部材の直線移動方向に直線状に接合されて形成されていることを特徴としている。
【0010】
また、本発明に係る位置検出センサは、前記磁石と前記軟磁性体が、前記被位置検出部材の直線移動方向に交互に配設されていることを特徴としている。
【0011】
更に、本発明に係る位置検出センサは、前記磁界発生部材が、前記被位置検出部材の直線移動方向の中心を通りかつ前記被位置検出部材の直線移動方向と直交する面に関して対称に形成されていることを特徴としている。
【0012】
一方、本発明に係るクラッチアクチュエータは、第1クラッチ板を第2クラッチ板に対して当接離間させるようにストロークするピストンと、前記ピストンのストロークに応じて直線移動する直線移動部材と、前記直線移動部材の直線移動を検出する位置検出センサとを少なくとも備えるクラッチアクチュエータにおいて、前記位置検出センサが、前述の本発明の位置検出センサのいずれか1つであり、前記被位置検出部材が前記直線移動部材であり、前記位置検出センサが前記直線移動部材の位置を検出することを特徴としている。
【0013】
また、本発明に係るクラッチ装置は、互いに当接離間可能に設けられた第1および第2クラッチ板と、前記第1クラッチ板を前記第2クラッチ板に対して当接離間させるようにストロークするピストンを有するクラッチアクチュエータとを少なくとも備えるクラッチ装置において、前記クラッチアクチュエータが、前述の本発明のクラッチアクチュエータであることを特徴としている。
【0014】
更に、本発明に係るクラッチ装置は、前記位置検出センサの前記磁界発生部材が前記直線移動部材に設けられていることを特徴としている。
【発明の効果】
【0015】
このように構成された本発明に係る位置検出センサによれば、磁石に軟磁性体を接合して磁界発生部材を構成しているので、軟磁性体が磁石により磁化されることにより磁界発生部材を1つの磁石として構成することができる。これにより、被位置検出部材の直線移動方向の磁界発生部材の長さを従来の磁界発生部材の長さに比べて長く設定することがで
きる。したがって、被位置検出部材の直線移動が大きい場合にも磁界発生部材による被位置検出部材の位置検出をより正確に検出することが可能となる。
【0016】
また、被位置検出部材の直線移動方向の磁界発生部材の長さが従来の磁界発生部材の長さに比べて長く設定されても、磁石よりコストの安い軟磁性体を用いているので、磁界発生部材の体積が磁石だけで構成される磁界発生部材に比べて軟磁性体の体積の分低減する。これにより、磁界発生部材を効果的に安価に製造することができる。
このようにして、被位置検出部材の直線移動が大きい場合にも磁界発生部材による位置検出をより正確に検出しながら、しかもコストを安くすることが可能となる。
【0017】
一方、本発明に係るクラッチアクチュエータおよびクラッチ装置によれば、本発明の位置検出センサを備えているので、クラッチ板のストロークが従来のクラッチ板より大きい場合にも、クラッチの制御をより正確に行うことができるとともに、長い直線移動を検出可能な位置検出センサをクラッチに設けても、クラッチのコストの上昇を抑制することが可能となる。
【図面の簡単な説明】
【0018】
【図1】本発明に係る位置検出センサの実施の形態の第1例を模式的に示すブロック図である。
【図2】図1に示す位置検出センサを備える本発明のクラッチの実施の形態の一例を模式的に示す図である。
【図3】本発明に係る位置検出センサの実施の形態の第2例を模式的に示すブロック図である。
【図4】本発明に係る位置検出センサの実施の形態の第3例を模式的に示すブロック図である。
【図5】本発明に係る位置検出センサの実施の形態の第4例を模式的に示すブロック図である。
【図6】従来の磁気センサを用いた位置検出センサを模式的に示す図である。
【図7】従来の位置検出センサの問題を解決可能であると考えられる位置検出センサを模式的に示す図である。
【発明を実施するための形態】
【0019】
以下、図面を用いて本発明を実施するための形態について説明する。
図1は本発明に係る位置検出センサの実施の形態の第1例を模式的に示すブロック図である。なお、前述の図6に示す構成要素と同じ構成要素には同じ符号を付すことで、それらの詳細な説明は省略する。
【0020】
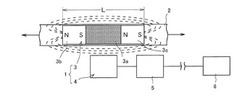
図1に示すように、第1例の位置検出センサ1の磁界発生部材3は、被位置検出部材2の直線移動方向の長さが所定長さで磁石により磁化される例えば鉄等の軟磁性体3aと、同じ大きさの一対の磁石3b,3cとを有している。一対の磁石3b,3cは、それぞれ、軟磁性体3aの両端に被位置検出部材2の直線移動方向に直線状に接合されている。すなわち、磁石3b,3cと軟磁性体3aは被位置検出部材2の直線移動方向に交互に配設さ
れる。その場合、磁石3b,3cと軟磁性体3aは、磁石3b,3cの磁力で分離可能に接合されるか、あるいは適宜の接着剤で分離不能に接合される。
【0021】
そして、被位置検出部材2の直線移動方向の磁界発生部材3の長さLは、図6に示す被位置検出部材2の直線移動方向の従来の磁界発生部材3の長さL′より長く設定されている。つまり、磁界発生部材3は、軟磁性体3aが磁石3b,3cによって磁化されて被位
置検出部材2の直線移動方向の長さLの1つの長い磁石として構成される。その場合、磁界発生部材3は被位置検出部材2の直線移動方向の中心を通りかつ被位置検出部材2の直
線移動方向と直交する面に関して対称に形成される。
【0022】
このように構成された第1例の位置検出センサ1によれば、磁石3b,3cに軟磁性体
3aを接合して磁界発生部材3を構成しているので、軟磁性体3aが磁石3b,3cによ
り磁化されることにより磁界発生部材3を1つの磁石として構成することができる。これにより、被位置検出部材2の直線移動方向の磁界発生部材3の長さLを従来の磁界発生部材3の長さL′に比べて長く設定することができる。したがって、被位置検出部材2の直線移動が大きい場合にも磁界発生部材3による被位置検出部材2の位置検出をより正確に検出することが可能となる。
【0023】
また、被位置検出部材2の直線移動方向の磁界発生部材3の長さLが従来の磁界発生部材3の長さL′に比べて長く設定されても、磁石よりコストの安い軟磁性体3aを用いているので、磁界発生部材3の体積が磁石だけで構成される磁界発生部材に比べて軟磁性体3aの体積の分低減する。これにより、磁界発生部材3を効果的に安価に製造することができる。
このようにして、被位置検出部材2の直線移動が大きい場合にも磁界発生部材3による位置検出をより正確に検出しながら、しかもコストを安くすることが可能となる。
第1例の位置検出センサ1の他の構成および他の作用効果は、図6に示す従来例と同じである。
【0024】
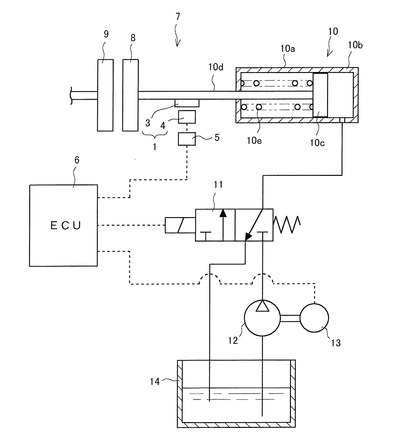
図2は、図1に示す第1例の位置検出センサを備える本発明のクラッチアクチュエータの実施の形態の一例、およびこのクラッチアクチュエータを備える本発明のクラッチ装置の実施の形態の一例を模式的に示す図である。
図2に示すように、この例のクラッチ装置7は、互いに当接離間可能な一対の第1および第2クラッチ板8,9と、第1クラッチ板8を作動するクラッチアクチュエータ10と
、クラッチアクチュエータ10を作動するための作動液を供給・排出制御するための電磁切換弁11と、クラッチアクチュエータ10へ作動液を供給するためのポンプ12と、ポンプ12を駆動するモータ13と、作動液を貯留するリザーバタンク14とを少なくとも備えている。
【0025】
クラッチアクチュエータ10は、シリンダ部10aと、シリンダ部10a内に液圧室10bを液密に区画するピストン10cと、ピストン10cを第1クラッチ板8に連結するピストンロッド10d(本発明の直線移動部材に相当)と、ピストン10cを非作動位置の方へ常時付勢するリタースプリング10eとを有する。ピストン10cは第1クラッチ板8を第2クラッチ板9に対して当接離間させるようにストロークする。その場合、この例のクラッチ装置7では、クラッチアクチュエータ10のピストン10cのストロークが従来のクラッチアクチュエータのピストン10cのストロークより長く設定されている。したがって、クラッチアクチュエータ10のピストン10cがストロークするとき、ピストンロッド10dの直線移動が従来のクラッチのアクチュエータのピストンロッドの直線移動よりかなり長くなる。また、電磁切換弁11は、非作動時には図2に示すようにクラッチアクチュエータ10の液圧室10bをポンプ12から遮断しかつリザーバタンク14に接続するとともに、作動時にはクラッチアクチュエータ10の液圧室10bをリザーバタンク14から遮断しかつポンプ12に接続する。
【0026】
更に、この例のクラッチ装置7は、図1に示す第1例の位置検出センサ1を備えている。その場合、位置検出センサ1の磁界発生部材3は、クラッチアクチュエータ10のピストンロッド10d(本発明における被位置検出部材に相当)に設けられている。したがって、磁界発生部材3はピストンロッド10dと一体に直線移動する。また、位置検出センサ1の磁界検出部4は信号読出部5を介して電子制御装置(ECU)6に接続されている。また、電磁切換弁11およびポンプ12のモータ13もECU6に接続されている。
【0027】
このように構成されたこの例のクラッチ装置7においては、図2に示すようにクラッチ装置7の切断時には、クラッチアクチュエータ10の液圧室10bが電磁切換弁11によりリザーバタンク14に接続され、ピストン10cが非作動位置に設定される。したがって、クラッチアクチュエータ10が非作動状態になっている。クラッチ装置7を接続するために、ECU6が電磁切換弁11を切り換えると、クラッチアクチュエータ10の液圧室10bがポンプ12に接続される。同時に、ECU6はモータ13を駆動してポンプ12を作動する。これにより、作動液が液圧室10bに供給されてピストン10cがストロークする。したがって、第1クラッチ板8が第2クラッチ板9の方へ移動して第2クラッチ板9に当接する。これにより、クラッチが接続される。このとき、ECU6は、位置検出センサ1で検出されたピストンロッド10dの直線移動の位置に基づいて電磁切換弁11およびモータ13を制御して、クラッチの接続を制御する。クラッチ装置7を切断するために、ECU6が電磁切換弁11を非作動位置に切り換えると、クラッチアクチュエータ10の液圧室10bがリザーバタンク14に接続される。同時に、ECU6はモータ13を停止してポンプ12の作動を停止する。これにより、液圧室10bの作動液がリザーバタンク14に排出され、ピストン10cがリターンスプリング10eの付勢力により図2に示す非作動位置となる。
【0028】
この例のクラッチアクチュエータ10およびクラッチ装置7によれば、第1例の位置検出センサを備えているので、クラッチ板8のストロークが従来のクラッチ板より大きい場合にも、クラッチ装置7の制御をより正確に行うことができるとともに、長い直線移動を検出可能な位置検出センサ1をクラッチアクチュエータ10およびクラッチ装置7に設けても、クラッチアクチュエータ10およびクラッチ装置7のコストの上昇を抑制することが可能となる。
【0029】
図3は、本発明に係る位置検出センサの実施の形態の第2例を模式的に示すブロック図である。
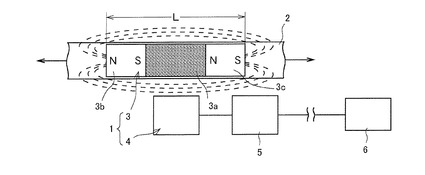
図3に示すように、第2例の位置検出センサ1は、磁界発生部材3が3個の磁石3d,
3e,3fと2個の軟磁性体3g,3hとを有する。その場合、2個の軟磁性体3g,3h
がそれぞれ3個の磁石3d,3e,3fの間に配設されて分離可能にあるいは分離不能に直線状に接合されている。そして、被位置検出部材2の直線移動方向の磁界発生部材3の長さLは、図6に示す被位置検出部材2の直線移動方向の従来の磁界発生部材3の長さL′より長く設定されている。
【0030】
第2例の位置検出センサ1の他の構成および作用効果は、第1例の位置検出センサ1と同様である。また、第2例の位置検出センサ1を備えるクラッチ装置7の構成および作用効果は、第1例の位置検出センサ1を備えるクラッチ装置7と同様である。
【0031】
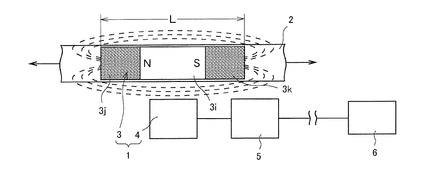
図4は、本発明に係る位置検出センサの実施の形態の第3例を模式的に示すブロック図である。
図4に示すように、第3例の位置検出センサ1は、第1例の位置検出センサ1とは逆に、磁界発生部材3が1個の磁石3iと一対の軟磁性体3j,3kとを有する。その場合、
一対の軟磁性体3j,3kがそれぞれ1個の磁石3iの両端に分離可能にあるいは分離不
能に直線状に接合されている。そして、被位置検出部材2の直線移動方向の磁界発生部材3の長さLは、図6に示す被位置検出部材2の直線移動方向の従来の磁界発生部材3の長さL′より長く設定されている。
【0032】
第3例の位置検出センサ1の他の構成および作用効果は、第1例の位置検出センサ1と同様である。また、第3例の位置検出センサ1を備えるクラッチ装置7の構成および作用効果は、第1例の位置検出センサ1を備えるクラッチ装置7と同様である。
【0033】
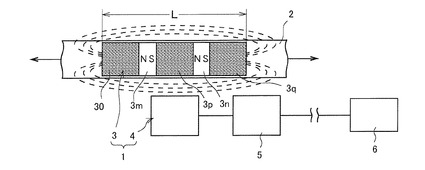
図5は、本発明に係る位置検出センサの実施の形態の第4例を模式的に示すブロック図である。
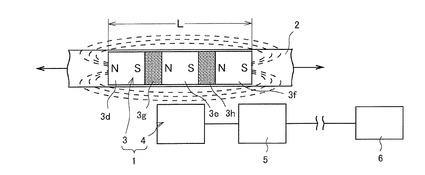
図5に示すように、第4例の位置検出センサ1は、第3例の位置検出センサ1とは逆に、磁界発生部材3が2個の磁石3m,3nと3個の軟磁性体3o,3p,3qとを有する。
その場合、2個の磁石3m,3nがそれぞれ3個の軟磁性体3o,3p,3qの間に配設さ
れて分離可能にあるいは分離不能に直線状に接合されている。そして、被位置検出部材2の直線移動方向の磁界発生部材3の長さLは、図6に示す被位置検出部材2の直線移動方向の従来の磁界発生部材3の長さL′より長く設定されている。
【0034】
第4例の位置検出センサ1の他の構成および作用効果は、第1例の位置検出センサ1と同様である。また、第4例の位置検出センサ1を備えるクラッチ装置7の構成および作用効果は、第1例の位置検出センサ1を備えるクラッチ装置7と同様である。
【0035】
なお、本発明は前述の各例に限定されることはなく、種々設計変更が可能である。例えば、磁性発生部材3つまり磁石は被位置検出部材2に直接設ける必要はなく、被位置検出部材2の直線移動に応じて直線移動する部材に設けることもできる。また、磁石の数および軟磁性体の数はいずれも任意に設定することができる。その場合、各磁石および各軟磁性体は、それぞれ、被位置検出部材2の直線移動方向の中心を通りかつ被位置検出部材2の直線移動方向と直交する面に関して対称に形成される。要は、本発明は、特許請求の範囲に記載された技術事項の範囲内で種々の設計変更が可能である。
【産業上の利用可能性】
【0036】
本発明に係る位置検出センサは、被位置検出部材の直線移動に応じて直線状に移動するとともに磁界を発生する磁界発生部材の磁界の変化を検出することで、被位置検出部材の位置を検出する位置検出センサに好適に利用可能である。
また、本発明に係るクラッチは、本発明の位置検出センサを用いて制御可能なクラッチ好適に利用可能である。
【符号の説明】
【0037】
1…位置検出センサ、2…被位置検出部材、3…磁界発生部材、3a,3g,3h,3j,3k,3o,3p,3q…軟磁性体、3b,3c,3d,3e,3f,3i,3m,3n…磁石、4…磁界検出部、5…信号読出部、6…電子制御装置(ECU)、7…クラッチ装置、8…第1クラッチ板、9…第2クラッチ板、10…クラッチアクチュエータ、10b…液圧室、10c…ピストン、10d…ピストンロッド、10e…リタースプリング、11…電磁切換弁、12…ポンプ、13…モータ
【技術分野】
【0001】
本発明は、被位置検出部材の直線状の移動に応じて直線状に移動するとともに磁界を発生する磁界発生部材の磁界の変化を検出することで、被位置検出部材の位置を検出する位置検出センサの技術分野、この位置検出センサを備えたクラッチアクチュエータの技術分野、およびクラッチアクチュエータを備えたクラッチ装置の技術分野に関するものである。
【背景技術】
【0002】
従来、車両のクラッチ制御やチェンジレバー制御等の種々の制御には、磁気センサを用い、被位置検出部材の直線状の移動に応じて直線移動するとともに磁界を発生する磁界発生部材の磁界の変化を磁界検出部で検出することで、被位置検出部材の位置を検出する位置検出センサが多々用いられている。このような位置検出センサとして、被位置検出部材であるチェンジレバーの移動に応じて直線移動するシャフトに磁界発生部材であるマグネットを設けるとともに、シャフトの移動とともに移動するマグネットの磁界の変化を磁界検出部で検出することで、チェンジレバーの位置を検出する位置検出センサが知られている(例えば、特許文献1参照)。
【0003】
図6は、従来のこのような磁気センサを用いた位置検出センサを模式的に示す図である。図6中、1は位置検出センサ、2は図6において位置が検出される直線状に移動可能な被位置検出部材、3は被位置検出部材2に設けられた磁石を有する磁界発生部材、4は磁界発生部材3の磁石の磁界を検出して電気信号に変換する、例えばホール素子やコイル等の磁界検出部、5は磁界検出部4で検出した磁界の変化の電気信号を読み出す信号読出部、6は信号読出部5からの電気信号が入力される電子制御装置(ECU)である。その場合、位置検出センサ1は磁界発生部材3および磁界検出部4から構成される。
【0004】
このような位置検出センサ1においては、被位置検出部材2が図6において左右方向に直線移動すると、磁界発生部材3も被位置検出部材2と同方向に一体に直線移動する。この磁界発生部材3の移動により、磁界検出部4が検出する磁界発生部材3の磁界が変化する。磁界検出部4は検出した磁界発生部材3の磁界の変化を検出して電圧の変化等の電気信号に変換する。そして、信号読出部5が信号読出部磁界検出部4で検出した磁界の変化の電気信号を読み出して、例えば電子制御装置(ECU)6に送出する。ECU6は、信号読出部5からの磁界の変化の電気信号に基づいて被位置検出部材2の位置を判断する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−99258号公報。
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、近年、従来の被位置検出部材2の移動量に比べてかなり大きい移動量の被位置検出部材2の位置を検出することが求められる場合がある。しかし、このような場合従来の位置検出センサ1では、被位置検出部材2の直線移動方向の磁界発生部材3の長さL′が大きな被位置検出部材2の移動量に対して短いため、被位置検出部材2の位置を正確に検出することが難しいという問題がある。
【0007】
そこで、図7に示すように被位置検出部材2の直線移動方向の磁界発生部材3の磁石の
長さLを従来の磁石に比べて単純に長くすることが考えられる。しかしながら、磁石は比較的高価であるため、磁界発生部材3の磁石の長さLを単純に長くしたのでは、磁石の体積が増加して位置検出センサ1のコストが高くなるという別の問題が生じる。
【0008】
本発明はこのような事情に鑑みてなされたものであって、その目的は、被位置検出部材の直線移動が大きい場合にも磁界発生部材による位置検出をより正確に検出しながら、しかもコストを安くすることのできる位置検出センサを提供することである。
本発明の他の目的は、本発明の位置検出センサを備えることで動力伝達制御をより正確に行うことのできるクラッチアクチュエータ、およびこれを備えたクラッチ装置を提供することである。
【課題を解決するための手段】
【0009】
前述の課題を解決するために、本発明に係る位置検出センサは、位置が検出される被位置検出部材の直線移動に応じて直線移動するとともに磁界を発生する磁界発生部材と、前記磁界発生部材の磁界を検出する磁界検出部とを少なくとも有し、前記被位置検出部材の直線移動により前記磁界発生部材が直線移動するとき、前記磁界検出部で前記磁界の変化を検出することで、前記被位置検出部材の位置を検出する位置検出センサにおいて、前記磁界発生部材が、予め定められた第1の所定数の磁石と予め定められた第2の所定数の軟磁性体とが前記被位置検出部材の直線移動方向に直線状に接合されて形成されていることを特徴としている。
【0010】
また、本発明に係る位置検出センサは、前記磁石と前記軟磁性体が、前記被位置検出部材の直線移動方向に交互に配設されていることを特徴としている。
【0011】
更に、本発明に係る位置検出センサは、前記磁界発生部材が、前記被位置検出部材の直線移動方向の中心を通りかつ前記被位置検出部材の直線移動方向と直交する面に関して対称に形成されていることを特徴としている。
【0012】
一方、本発明に係るクラッチアクチュエータは、第1クラッチ板を第2クラッチ板に対して当接離間させるようにストロークするピストンと、前記ピストンのストロークに応じて直線移動する直線移動部材と、前記直線移動部材の直線移動を検出する位置検出センサとを少なくとも備えるクラッチアクチュエータにおいて、前記位置検出センサが、前述の本発明の位置検出センサのいずれか1つであり、前記被位置検出部材が前記直線移動部材であり、前記位置検出センサが前記直線移動部材の位置を検出することを特徴としている。
【0013】
また、本発明に係るクラッチ装置は、互いに当接離間可能に設けられた第1および第2クラッチ板と、前記第1クラッチ板を前記第2クラッチ板に対して当接離間させるようにストロークするピストンを有するクラッチアクチュエータとを少なくとも備えるクラッチ装置において、前記クラッチアクチュエータが、前述の本発明のクラッチアクチュエータであることを特徴としている。
【0014】
更に、本発明に係るクラッチ装置は、前記位置検出センサの前記磁界発生部材が前記直線移動部材に設けられていることを特徴としている。
【発明の効果】
【0015】
このように構成された本発明に係る位置検出センサによれば、磁石に軟磁性体を接合して磁界発生部材を構成しているので、軟磁性体が磁石により磁化されることにより磁界発生部材を1つの磁石として構成することができる。これにより、被位置検出部材の直線移動方向の磁界発生部材の長さを従来の磁界発生部材の長さに比べて長く設定することがで
きる。したがって、被位置検出部材の直線移動が大きい場合にも磁界発生部材による被位置検出部材の位置検出をより正確に検出することが可能となる。
【0016】
また、被位置検出部材の直線移動方向の磁界発生部材の長さが従来の磁界発生部材の長さに比べて長く設定されても、磁石よりコストの安い軟磁性体を用いているので、磁界発生部材の体積が磁石だけで構成される磁界発生部材に比べて軟磁性体の体積の分低減する。これにより、磁界発生部材を効果的に安価に製造することができる。
このようにして、被位置検出部材の直線移動が大きい場合にも磁界発生部材による位置検出をより正確に検出しながら、しかもコストを安くすることが可能となる。
【0017】
一方、本発明に係るクラッチアクチュエータおよびクラッチ装置によれば、本発明の位置検出センサを備えているので、クラッチ板のストロークが従来のクラッチ板より大きい場合にも、クラッチの制御をより正確に行うことができるとともに、長い直線移動を検出可能な位置検出センサをクラッチに設けても、クラッチのコストの上昇を抑制することが可能となる。
【図面の簡単な説明】
【0018】
【図1】本発明に係る位置検出センサの実施の形態の第1例を模式的に示すブロック図である。
【図2】図1に示す位置検出センサを備える本発明のクラッチの実施の形態の一例を模式的に示す図である。
【図3】本発明に係る位置検出センサの実施の形態の第2例を模式的に示すブロック図である。
【図4】本発明に係る位置検出センサの実施の形態の第3例を模式的に示すブロック図である。
【図5】本発明に係る位置検出センサの実施の形態の第4例を模式的に示すブロック図である。
【図6】従来の磁気センサを用いた位置検出センサを模式的に示す図である。
【図7】従来の位置検出センサの問題を解決可能であると考えられる位置検出センサを模式的に示す図である。
【発明を実施するための形態】
【0019】
以下、図面を用いて本発明を実施するための形態について説明する。
図1は本発明に係る位置検出センサの実施の形態の第1例を模式的に示すブロック図である。なお、前述の図6に示す構成要素と同じ構成要素には同じ符号を付すことで、それらの詳細な説明は省略する。
【0020】
図1に示すように、第1例の位置検出センサ1の磁界発生部材3は、被位置検出部材2の直線移動方向の長さが所定長さで磁石により磁化される例えば鉄等の軟磁性体3aと、同じ大きさの一対の磁石3b,3cとを有している。一対の磁石3b,3cは、それぞれ、軟磁性体3aの両端に被位置検出部材2の直線移動方向に直線状に接合されている。すなわち、磁石3b,3cと軟磁性体3aは被位置検出部材2の直線移動方向に交互に配設さ
れる。その場合、磁石3b,3cと軟磁性体3aは、磁石3b,3cの磁力で分離可能に接合されるか、あるいは適宜の接着剤で分離不能に接合される。
【0021】
そして、被位置検出部材2の直線移動方向の磁界発生部材3の長さLは、図6に示す被位置検出部材2の直線移動方向の従来の磁界発生部材3の長さL′より長く設定されている。つまり、磁界発生部材3は、軟磁性体3aが磁石3b,3cによって磁化されて被位
置検出部材2の直線移動方向の長さLの1つの長い磁石として構成される。その場合、磁界発生部材3は被位置検出部材2の直線移動方向の中心を通りかつ被位置検出部材2の直
線移動方向と直交する面に関して対称に形成される。
【0022】
このように構成された第1例の位置検出センサ1によれば、磁石3b,3cに軟磁性体
3aを接合して磁界発生部材3を構成しているので、軟磁性体3aが磁石3b,3cによ
り磁化されることにより磁界発生部材3を1つの磁石として構成することができる。これにより、被位置検出部材2の直線移動方向の磁界発生部材3の長さLを従来の磁界発生部材3の長さL′に比べて長く設定することができる。したがって、被位置検出部材2の直線移動が大きい場合にも磁界発生部材3による被位置検出部材2の位置検出をより正確に検出することが可能となる。
【0023】
また、被位置検出部材2の直線移動方向の磁界発生部材3の長さLが従来の磁界発生部材3の長さL′に比べて長く設定されても、磁石よりコストの安い軟磁性体3aを用いているので、磁界発生部材3の体積が磁石だけで構成される磁界発生部材に比べて軟磁性体3aの体積の分低減する。これにより、磁界発生部材3を効果的に安価に製造することができる。
このようにして、被位置検出部材2の直線移動が大きい場合にも磁界発生部材3による位置検出をより正確に検出しながら、しかもコストを安くすることが可能となる。
第1例の位置検出センサ1の他の構成および他の作用効果は、図6に示す従来例と同じである。
【0024】
図2は、図1に示す第1例の位置検出センサを備える本発明のクラッチアクチュエータの実施の形態の一例、およびこのクラッチアクチュエータを備える本発明のクラッチ装置の実施の形態の一例を模式的に示す図である。
図2に示すように、この例のクラッチ装置7は、互いに当接離間可能な一対の第1および第2クラッチ板8,9と、第1クラッチ板8を作動するクラッチアクチュエータ10と
、クラッチアクチュエータ10を作動するための作動液を供給・排出制御するための電磁切換弁11と、クラッチアクチュエータ10へ作動液を供給するためのポンプ12と、ポンプ12を駆動するモータ13と、作動液を貯留するリザーバタンク14とを少なくとも備えている。
【0025】
クラッチアクチュエータ10は、シリンダ部10aと、シリンダ部10a内に液圧室10bを液密に区画するピストン10cと、ピストン10cを第1クラッチ板8に連結するピストンロッド10d(本発明の直線移動部材に相当)と、ピストン10cを非作動位置の方へ常時付勢するリタースプリング10eとを有する。ピストン10cは第1クラッチ板8を第2クラッチ板9に対して当接離間させるようにストロークする。その場合、この例のクラッチ装置7では、クラッチアクチュエータ10のピストン10cのストロークが従来のクラッチアクチュエータのピストン10cのストロークより長く設定されている。したがって、クラッチアクチュエータ10のピストン10cがストロークするとき、ピストンロッド10dの直線移動が従来のクラッチのアクチュエータのピストンロッドの直線移動よりかなり長くなる。また、電磁切換弁11は、非作動時には図2に示すようにクラッチアクチュエータ10の液圧室10bをポンプ12から遮断しかつリザーバタンク14に接続するとともに、作動時にはクラッチアクチュエータ10の液圧室10bをリザーバタンク14から遮断しかつポンプ12に接続する。
【0026】
更に、この例のクラッチ装置7は、図1に示す第1例の位置検出センサ1を備えている。その場合、位置検出センサ1の磁界発生部材3は、クラッチアクチュエータ10のピストンロッド10d(本発明における被位置検出部材に相当)に設けられている。したがって、磁界発生部材3はピストンロッド10dと一体に直線移動する。また、位置検出センサ1の磁界検出部4は信号読出部5を介して電子制御装置(ECU)6に接続されている。また、電磁切換弁11およびポンプ12のモータ13もECU6に接続されている。
【0027】
このように構成されたこの例のクラッチ装置7においては、図2に示すようにクラッチ装置7の切断時には、クラッチアクチュエータ10の液圧室10bが電磁切換弁11によりリザーバタンク14に接続され、ピストン10cが非作動位置に設定される。したがって、クラッチアクチュエータ10が非作動状態になっている。クラッチ装置7を接続するために、ECU6が電磁切換弁11を切り換えると、クラッチアクチュエータ10の液圧室10bがポンプ12に接続される。同時に、ECU6はモータ13を駆動してポンプ12を作動する。これにより、作動液が液圧室10bに供給されてピストン10cがストロークする。したがって、第1クラッチ板8が第2クラッチ板9の方へ移動して第2クラッチ板9に当接する。これにより、クラッチが接続される。このとき、ECU6は、位置検出センサ1で検出されたピストンロッド10dの直線移動の位置に基づいて電磁切換弁11およびモータ13を制御して、クラッチの接続を制御する。クラッチ装置7を切断するために、ECU6が電磁切換弁11を非作動位置に切り換えると、クラッチアクチュエータ10の液圧室10bがリザーバタンク14に接続される。同時に、ECU6はモータ13を停止してポンプ12の作動を停止する。これにより、液圧室10bの作動液がリザーバタンク14に排出され、ピストン10cがリターンスプリング10eの付勢力により図2に示す非作動位置となる。
【0028】
この例のクラッチアクチュエータ10およびクラッチ装置7によれば、第1例の位置検出センサを備えているので、クラッチ板8のストロークが従来のクラッチ板より大きい場合にも、クラッチ装置7の制御をより正確に行うことができるとともに、長い直線移動を検出可能な位置検出センサ1をクラッチアクチュエータ10およびクラッチ装置7に設けても、クラッチアクチュエータ10およびクラッチ装置7のコストの上昇を抑制することが可能となる。
【0029】
図3は、本発明に係る位置検出センサの実施の形態の第2例を模式的に示すブロック図である。
図3に示すように、第2例の位置検出センサ1は、磁界発生部材3が3個の磁石3d,
3e,3fと2個の軟磁性体3g,3hとを有する。その場合、2個の軟磁性体3g,3h
がそれぞれ3個の磁石3d,3e,3fの間に配設されて分離可能にあるいは分離不能に直線状に接合されている。そして、被位置検出部材2の直線移動方向の磁界発生部材3の長さLは、図6に示す被位置検出部材2の直線移動方向の従来の磁界発生部材3の長さL′より長く設定されている。
【0030】
第2例の位置検出センサ1の他の構成および作用効果は、第1例の位置検出センサ1と同様である。また、第2例の位置検出センサ1を備えるクラッチ装置7の構成および作用効果は、第1例の位置検出センサ1を備えるクラッチ装置7と同様である。
【0031】
図4は、本発明に係る位置検出センサの実施の形態の第3例を模式的に示すブロック図である。
図4に示すように、第3例の位置検出センサ1は、第1例の位置検出センサ1とは逆に、磁界発生部材3が1個の磁石3iと一対の軟磁性体3j,3kとを有する。その場合、
一対の軟磁性体3j,3kがそれぞれ1個の磁石3iの両端に分離可能にあるいは分離不
能に直線状に接合されている。そして、被位置検出部材2の直線移動方向の磁界発生部材3の長さLは、図6に示す被位置検出部材2の直線移動方向の従来の磁界発生部材3の長さL′より長く設定されている。
【0032】
第3例の位置検出センサ1の他の構成および作用効果は、第1例の位置検出センサ1と同様である。また、第3例の位置検出センサ1を備えるクラッチ装置7の構成および作用効果は、第1例の位置検出センサ1を備えるクラッチ装置7と同様である。
【0033】
図5は、本発明に係る位置検出センサの実施の形態の第4例を模式的に示すブロック図である。
図5に示すように、第4例の位置検出センサ1は、第3例の位置検出センサ1とは逆に、磁界発生部材3が2個の磁石3m,3nと3個の軟磁性体3o,3p,3qとを有する。
その場合、2個の磁石3m,3nがそれぞれ3個の軟磁性体3o,3p,3qの間に配設さ
れて分離可能にあるいは分離不能に直線状に接合されている。そして、被位置検出部材2の直線移動方向の磁界発生部材3の長さLは、図6に示す被位置検出部材2の直線移動方向の従来の磁界発生部材3の長さL′より長く設定されている。
【0034】
第4例の位置検出センサ1の他の構成および作用効果は、第1例の位置検出センサ1と同様である。また、第4例の位置検出センサ1を備えるクラッチ装置7の構成および作用効果は、第1例の位置検出センサ1を備えるクラッチ装置7と同様である。
【0035】
なお、本発明は前述の各例に限定されることはなく、種々設計変更が可能である。例えば、磁性発生部材3つまり磁石は被位置検出部材2に直接設ける必要はなく、被位置検出部材2の直線移動に応じて直線移動する部材に設けることもできる。また、磁石の数および軟磁性体の数はいずれも任意に設定することができる。その場合、各磁石および各軟磁性体は、それぞれ、被位置検出部材2の直線移動方向の中心を通りかつ被位置検出部材2の直線移動方向と直交する面に関して対称に形成される。要は、本発明は、特許請求の範囲に記載された技術事項の範囲内で種々の設計変更が可能である。
【産業上の利用可能性】
【0036】
本発明に係る位置検出センサは、被位置検出部材の直線移動に応じて直線状に移動するとともに磁界を発生する磁界発生部材の磁界の変化を検出することで、被位置検出部材の位置を検出する位置検出センサに好適に利用可能である。
また、本発明に係るクラッチは、本発明の位置検出センサを用いて制御可能なクラッチ好適に利用可能である。
【符号の説明】
【0037】
1…位置検出センサ、2…被位置検出部材、3…磁界発生部材、3a,3g,3h,3j,3k,3o,3p,3q…軟磁性体、3b,3c,3d,3e,3f,3i,3m,3n…磁石、4…磁界検出部、5…信号読出部、6…電子制御装置(ECU)、7…クラッチ装置、8…第1クラッチ板、9…第2クラッチ板、10…クラッチアクチュエータ、10b…液圧室、10c…ピストン、10d…ピストンロッド、10e…リタースプリング、11…電磁切換弁、12…ポンプ、13…モータ
【特許請求の範囲】
【請求項1】
位置が検出される被位置検出部材の直線移動に応じて直線移動するとともに磁界を発生する磁界発生部材と、前記磁界発生部材の磁界を検出する磁界検出部とを少なくとも有し、前記被位置検出部材の直線移動により前記磁界発生部材が直線移動するとき、前記磁界検出部で前記磁界の変化を検出することで、前記被位置検出部材の位置を検出する位置検出センサにおいて、
前記磁界発生部材は、予め定められた第1の所定数の磁石と予め定められた第2の所定数の軟磁性体とが前記被位置検出部材の直線移動方向に直線状に接合されて形成されていることを特徴とする位置検出センサ。
【請求項2】
前記磁石と前記軟磁性体は、前記被位置検出部材の直線移動方向に交互に配設されていることを特徴とする請求項1に記載の位置検出センサ。
【請求項3】
前記磁界発生部材は、前記被位置検出部材の直線移動方向の中心を通りかつ前記被位置検出部材の直線移動方向と直交する面に関して対称に形成されていることを特徴とする請求項1または2に記載の位置検出センサ。
【請求項4】
第1クラッチ板を第2クラッチ板に対して当接離間させるようにストロークするピストンと、前記ピストンのストロークに応じて直線移動する直線移動部材と、前記直線移動部材の直線移動を検出する位置検出センサとを少なくとも備えるクラッチアクチュエータにおいて、
前記位置検出センサは、請求項1ないし3に記載のいずれか1つの位置検出センサであり、
前記被位置検出部材は前記直線移動部材であり、
前記位置検出センサは前記直線移動部材の位置を検出することを特徴とするクラッチアクチュエータ。
【請求項5】
互いに当接離間可能に設けられた第1および第2クラッチ板と、前記第1クラッチ板を前記第2クラッチ板に対して当接離間させるようにストロークするピストンを有するクラッチアクチュエータとを少なくとも備えるクラッチ装置において、
前記クラッチアクチュエータは、請求項4に記載のクラッチアクチュエータであることを特徴とするクラッチ装置。
【請求項6】
前記位置検出センサの前記磁界発生部材は前記直線移動部材に設けられていることを特徴とする請求項5に記載のクラッチ装置。
【請求項1】
位置が検出される被位置検出部材の直線移動に応じて直線移動するとともに磁界を発生する磁界発生部材と、前記磁界発生部材の磁界を検出する磁界検出部とを少なくとも有し、前記被位置検出部材の直線移動により前記磁界発生部材が直線移動するとき、前記磁界検出部で前記磁界の変化を検出することで、前記被位置検出部材の位置を検出する位置検出センサにおいて、
前記磁界発生部材は、予め定められた第1の所定数の磁石と予め定められた第2の所定数の軟磁性体とが前記被位置検出部材の直線移動方向に直線状に接合されて形成されていることを特徴とする位置検出センサ。
【請求項2】
前記磁石と前記軟磁性体は、前記被位置検出部材の直線移動方向に交互に配設されていることを特徴とする請求項1に記載の位置検出センサ。
【請求項3】
前記磁界発生部材は、前記被位置検出部材の直線移動方向の中心を通りかつ前記被位置検出部材の直線移動方向と直交する面に関して対称に形成されていることを特徴とする請求項1または2に記載の位置検出センサ。
【請求項4】
第1クラッチ板を第2クラッチ板に対して当接離間させるようにストロークするピストンと、前記ピストンのストロークに応じて直線移動する直線移動部材と、前記直線移動部材の直線移動を検出する位置検出センサとを少なくとも備えるクラッチアクチュエータにおいて、
前記位置検出センサは、請求項1ないし3に記載のいずれか1つの位置検出センサであり、
前記被位置検出部材は前記直線移動部材であり、
前記位置検出センサは前記直線移動部材の位置を検出することを特徴とするクラッチアクチュエータ。
【請求項5】
互いに当接離間可能に設けられた第1および第2クラッチ板と、前記第1クラッチ板を前記第2クラッチ板に対して当接離間させるようにストロークするピストンを有するクラッチアクチュエータとを少なくとも備えるクラッチ装置において、
前記クラッチアクチュエータは、請求項4に記載のクラッチアクチュエータであることを特徴とするクラッチ装置。
【請求項6】
前記位置検出センサの前記磁界発生部材は前記直線移動部材に設けられていることを特徴とする請求項5に記載のクラッチ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−83516(P2013−83516A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−222887(P2011−222887)
【出願日】平成23年10月7日(2011.10.7)
【出願人】(000003333)ボッシュ株式会社 (510)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月7日(2011.10.7)
【出願人】(000003333)ボッシュ株式会社 (510)
【Fターム(参考)】
[ Back to top ]