
位置検出携帯端末装置、方位決定方法および方位決定プログラム
【課題】装着者の体の向きとしての方位を簡易に決定すること。
【解決手段】磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における地磁気ベクトルの大きさの変化量である地磁気変化量を算出し、算出された地磁気変化量が所定の閾値の範囲内である場合は、磁気センサが取得した地磁気ベクトルから装着者の方位を決定する。また、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を装着者の方位として採用して決定する。あるいは、最新方位にジャイロセンサによって取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定する。
【解決手段】磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における地磁気ベクトルの大きさの変化量である地磁気変化量を算出し、算出された地磁気変化量が所定の閾値の範囲内である場合は、磁気センサが取得した地磁気ベクトルから装着者の方位を決定する。また、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を装着者の方位として採用して決定する。あるいは、最新方位にジャイロセンサによって取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、位置検出携帯端末装置、方位決定方法および方位決定プログラムに関する。
【背景技術】
【0002】
従来より、GPS(Global Positioning System)と自律航法とを組み合わせることにより、装着者の現在位置を連続的に検出する携帯端末装置が普及している。
【0003】
GPSは、GPS衛星からの信号を受信して、装着者の現在位置を検出するものであり、自律航法は、磁気センサが取得した地磁気ベクトルから装着者の身体の向き(方位)を算出し、加速度センサが取得した加速度情報から装着者の移動方向(前後左右)と移動距離を算出し、装着者の身体の向きと移動方向と移動距離から、装着者の現在位置を検出するものである。また、ジャイロセンサが取得した装着者の回転量も、装着者の身体の向き(方位)を算出する際に用いられる場合がある。
【0004】
ここで、装着者が建物内や建物の影を移動しているなど、GPS衛星からの信号を良好に受信できない場合、上記した携帯端末装置は、自律航法を用いることで連続的に当該装着者の現在位置を検出する。
【0005】
自律航法において、特許文献1では、移動距離を算出する際に用いられる歩幅を、加速度センサが取得した加速度情報に基づいて調整することにより、移動距離の算出精度を向上させる技術が開示されている。例えば、加速度が大きくなっている場合は、歩行リズムが早くなっていると判断し、歩幅を小さくするなどの調整を行なうことによって、移動距離の算出精度を向上させている。
【0006】
また、自律航法において、地磁気ベクトルから装着者の身体の向き(方位)を算出しているが、装着者の周囲に、建物の鉄筋やエレベータの駆動系など磁界を発生する要因が存在する場合は、磁気センサが取得する地磁気ベクトルに誤差が生じてしまう。そこで、特許文献2では、地点ごとに正確な地磁気ベクトルの情報をテーブルとして保持し、磁気センサが取得した地磁気ベクトルの情報の信頼度を、当該地磁気ベクトルの情報を取得した地点(例えば、GPSによって取得した地点)と、当該テーブルとを参照して判定する技術が開示されている。例えば、信頼度が低いと判定された場合は、警告を発することにより、算出された方位は信頼できないと装着者に報知する。
【0007】
さらに、特許文献3では、外部磁場によって磁気センサが取得する地磁気ベクトルに誤差が生じる場所を精度低下位置として予め登録しておき、精度低下位置においては方位の算出を停止することで、信頼度の低い方位を装着者に報知することを回避する技術が開示されている。
【0008】
【特許文献1】特開2000−97722号公報
【特許文献2】特許第3837533号公報
【特許文献3】特開2005−291935号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
ところで、上記した磁気センサによって算出される方位の信頼性を判定する従来の技術は、地点ごとの正確な地磁気ベクトルの情報や精度低下位置の情報などを、装着者が携帯端末装置を使用する可能性のある場所すべてにおいて保持しなければならないので、装着者の体の向きとしての方位を簡易に決定できないという問題点があった。
【0010】
そこで、この発明は、上述した従来技術の課題を解決するためになされたものであり、装着者の体の向きとしての方位を簡易に決定することが可能になる位置検出携帯端末装置、方位決定方法および方位決定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0011】
上述した課題を解決し、目的を達成するため、請求項1に係る発明は、磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出手段と、前記地磁気変化量算出手段によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定手段と、を備えたことを特徴とする。
【0012】
また、請求項2に係る発明は、上記の発明において、加速度センサが取得した加速度情報から前記装着者の歩行の有無を判定する歩行判定手段をさらに備え、前記方位決定手段は、前記地磁気変化量算出手段によって算出された地磁気変化量が所定の閾値の範囲内であり、かつ、前記歩行判定手段によって前記装着者の歩行有と判定された場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合、または、前記歩行判定手段によって前記装着者の歩行無と判定された場合は、前記最新方位を前記装着者の前記方位として採用して決定することを特徴とする。
【0013】
また、請求項3に係る発明は、上記の発明において、ジャイロセンサから前記装着者の回転量を取得する回転量取得手段をさらに備え、前記方位決定手段は、前記地磁気変化量算出手段によって算出された前記地磁気変化量が所定の閾値の範囲外である場合は、前記最新方位に前記回転量取得手段によって取得された前記回転量を加算した方位である回転量加算方位を前記装着者の前記方位として決定することを特徴とする。
【0014】
また、請求項4に係る発明は、上記の発明において、前記加速度センサから重力加速度を検知して前記装着者の体の傾きを算出する傾き算出手段をさらに備え、前記地磁気変化量算出手段は、前記傾き算出手段によって算出された前記傾きに基づいて、前記磁気センサから前記所定の時間ごとに前記地磁気ベクトルの水平成分および垂直成分を取得し、当該所定の時間における前記地磁気変化量として、前記地磁気ベクトルの水平成分および垂直成分の変化量である水平成分変化量および垂直成分変化量それぞれを算出し、前記方位決定手段は、前記水平成分変化量および前記垂直成分変化量それぞれに設定された所定の閾値と、前記地磁気変化量算出手段によって算出された前記水平成分変化量および前記垂直成分変化量それぞれとに基づいて前記方位を決定することを特徴とする。
【0015】
また、請求項5に係る発明は、上記の発明において、気圧センサから前記装着者が存在する場所の高度を算出する高度算出手段をさらに備え、前記方位決定手段は、前記高度ごとに設定された所定の閾値と、前記地磁気変化量算出手段によって算出された前記地磁気変化量と、前記高度算出手段によって算出された前記高度とに基づいて前記方位を決定することを特徴とする。
【0016】
また、請求項6に係る発明は、装着者の体の向きとしての方位を決定する方位決定方法であって、磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出工程と、前記地磁気変化量算出工程によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定工程と、を含んだことを特徴とする。
【0017】
また、請求項7に係る発明は、装着者の体の向きとしての方位を決定する方位決定方法をコンピュータに実行させる方位決定プログラムであって、磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出手順と、前記地磁気変化量算出手順によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定手順と、をコンピュータに実行させることを特徴とする。
【発明の効果】
【0018】
請求項1、6または7の発明によれば、磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における地磁気ベクトルの大きさの変化量である地磁気変化量を算出し、算出された地磁気変化量が所定の閾値の範囲内である場合は、磁気センサが取得した地磁気ベクトルから装着者の方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を装着者の方位として採用して決定するので、地点ごとの地磁気ベクトルの信頼度を判定するためのテーブルを別途保持せずに、地磁気変化量のみで磁気センサの取得した地磁気ベクトルの信頼度を容易に判定でき、装着者の体の向きとしての方位を簡易に決定することが可能になる。
【0019】
また、請求項2の発明によれば、加速度センサが取得した加速度情報から装着者の歩行の有無を判定し、算出された地磁気変化量が所定の閾値の範囲内であり、かつ、装着者の歩行有と判定された場合は、磁気センサが取得した地磁気ベクトルから装着者の方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合、または、装着者の歩行無と判定された場合は、最新方位を装着者の前記方位として採用して決定するので、例えば、周囲の環境によって磁気センサの取得した地磁気ベクトルの誤差が大きいにも係らず、歩行無であるために地磁気変化量が「0」である場合においても、取得した地磁気ベクトルを採用することを回避することができ、装着者の体の向きの方位を正確に決定することが可能になる。
【0020】
また、請求項3の発明によれば、ジャイロセンサから装着者の回転量を取得し、算出された地磁気変化量が所定の閾値の範囲外である場合は、最新方位にジャイロセンサから取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定するので、例えば、地磁気ベクトルの誤差が大きく信頼度が低い際に、装着者の体が回転している場合であっても、最新方位を修正することができ、装着者の体の向きの方位をより正確に決定することが可能になる。
【0021】
また、請求項4の発明によれば、加速度センサから重力加速度を検知して装着者の体の傾きを算出し、算出された傾きに基づいて、磁気センサから所定の時間ごとに地磁気ベクトルの水平成分および垂直成分を取得し、当該所定の時間における地磁気変化量として、地磁気ベクトルの水平成分および垂直成分の変化量である水平成分変化量および垂直成分変化量それぞれを算出し、水平成分変化量および垂直成分変化量それぞれに設定された所定の閾値と、算出された水平成分変化量および垂直成分変化量それぞれとに基づいて方位を決定するので、磁気センサの取得した地磁気ベクトルにおいて、周囲の環境によって生じる誤差による信頼度の低下を、水平成分変化量および垂直成分変化量に分けてそれぞれ詳細に判定することができ、装着者の体の向きの方位をより簡易に決定することが可能になる。
【0022】
また、請求項5の発明によれば、気圧センサから装着者が存在する場所の高度を算出し、高度ごとに設定された所定の閾値と、算出された地磁気変化量と、算出された高度とに基づいて前記方位を決定するので、さらに、高度変化にともなう地磁気ベクトルそのものの変化にも容易に対応でき、装着者の体の向きの方位をより簡易かつ正確に決定することが可能になる。
【発明を実施するための最良の形態】
【0023】
以下に添付図面を参照して、この発明に係る位置検出携帯端末装置、方位決定方法および方位決定プログラムの実施例を詳細に説明する。なお、以下では、実施例1における位置検出携帯端末装置の概要および特徴、実施例1における位置検出携帯端末装置の構成および処理の手順、実施例1の効果を順に説明し、最後に、他の実施例について説明する。
【実施例1】
【0024】
[用語の説明]
まず最初に、以下の実施例で用いる主要な用語を説明する。以下の実施例で用いる「磁気センサ」とは、地球の磁界の大きさおよび方向(3軸方向)の情報を含む地磁気ベクトルを取得するセンサのことであり、位置検出携帯端末装置は、「磁気センサ」が取得した地磁気ベクトルの情報に基づいて、当該位置検出携帯端末装置を装着する装着者の体の向きを算出して決定することができる。
【0025】
また、「加速度センサ」とは、3軸方向の加速度情報を取得するセンサのことであり、位置検出携帯端末装置は、「加速度センサ」が取得した装着者の体の移動によって生じる3軸方向の加速度情報に基づいて、当該装着者の移動方向(前後左右)および移動距離を算出することができる。例えば、位置検出携帯端末装置は、「加速度センサ」が取得した3軸それぞれの加速度情報の最大値と最小値の差である振幅値に基づいて、移動方向および移動距離を算出することができる。さらに「加速度センサ」は、地球の重力(重力加速度)を取得するセンサでもあり、位置検出携帯端末装置は、「加速度センサ」が取得した重力加速度情報に基づいて、当該位置検出携帯端末装置の傾き、すなわち、当該装着者の体の傾きを算出することができる。
【0026】
また、「気圧センサ」とは、高さ(高度)に応じて変動する気圧を取得するセンサであり、位置検出携帯端末装置は、「気圧センサ」が取得した気圧の値に基づいて、当該位置検出携帯端末装置の存在する高度、すなわち、当該装着者の存在する高度を算出することができる。また、「ジャイロセンサ」とは、回転量(具体的には、単位時間当たりの角速度)を取得するセンサであり、位置検出携帯端末装置は、「磁気センサ」が取得した地磁気ベクトルの情報と同様に、「ジャイロセンサ」が取得した回転量に基づいて、当該位置検出携帯端末装置を装着する装着者の体の向きを算出することができる。
【0027】
[実施例1における位置検出携帯端末装置の概要および特徴]
続いて、図1および図2を用いて、実施例1における位置検出携帯端末装置の主たる特徴を具体的に説明する。図1は、実施例1における位置検出携帯端末装置の概要を説明するための図であり、図2は、実施例1における位置検出携帯端末装置の特徴を説明するための図である。
【0028】
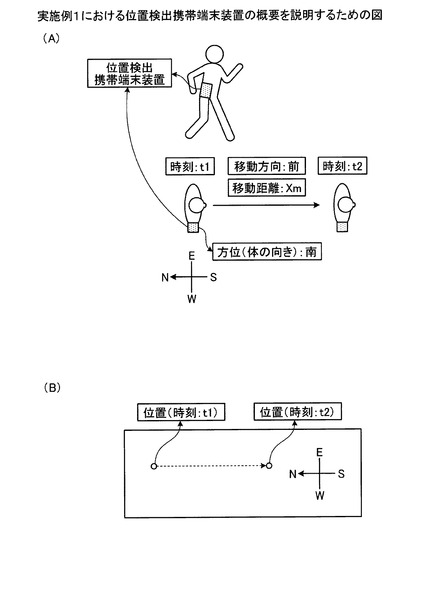
実施例1における位置検出携帯端末装置は、装着者の向きとしての方位と、当該装着者の移動方向および移動距離とに基づいて当該装着者の位置を検出することを概要とする。すなわち、実施例1における位置検出携帯端末装置は、図1の(A)に示すように、装着者の腰などに装着され、当該装着者の向きとしての方位、移動方向および移動距離とに基づいて当該装着者の位置を、自律的に検出する。すなわち、GPS衛星からの信号といった外部装置からの情報を用いることなく、実施例1における位置検出携帯端末装置自身が備える各種センサから取得した情報に基づいて、装着者の位置を、自律的に検出する。
【0029】
例えば、実施例1における位置検出携帯端末装置は、図1の(A)に示すように、「時刻:t1」における装着者の体の向きとしての方位(以下、方位と記す)を、磁気センサが取得した地磁気ベクトルの情報に基づいて、「方位(体の向き):南」として取得し、「時刻:t1」から「時刻:t2」の間における当該装着者の移動方向および移動距離を、加速度センサが取得した装着者の体の移動によって生じる3軸方向の加速度情報に基づいて、「移動方向:前」および「移動距離:Xm」として取得する。ここで、実施例1における位置検出携帯端末装置は、これら方位、移動方向および移動距離の情報を、例えば、装着者の位置情報を管理する管理センターに送信する。そして、当該管理センターは、これらの情報を処理することにより、例えば、図1の(B)に示すように、装着者の位置情報を建物内の見取り図に対応付けた画像を作成して装着者の位置を把握するともに、当該位置検出携帯端末装置に作成した画像を送信する。これにより、位置検出携帯端末装置の装着者も、自分の現在位置を把握することができる。
【0030】
なお、本実施例では、携帯端末装置が位置検出のみを専用に行なう場合について説明するが、本発明はこれに限られるものではなく、例えば、本発明を適用したPDA(Personal Digital Assistant)やPC(Personal Computer)などの携帯端末装置が位置検出をさらに行なう場合であってもよい。
【0031】
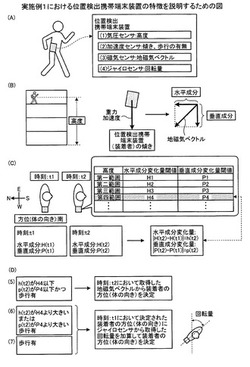
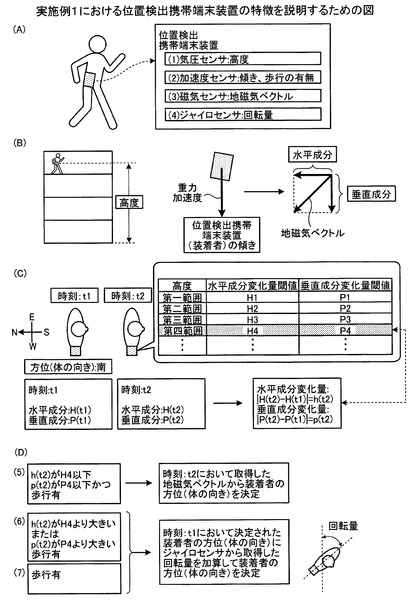
ここで、本発明は、装着者の体の向きとしての方位を簡易に決定することが可能になることに主たる特徴がある。この主たる特徴について簡単に説明すると、実施例1における位置検出携帯端末装置は、加速度センサ、ジャイロセンサ、磁気センサおよび気圧センサを備え、これら各種センサから取得した情報から方位決定に用いるデータを検出する。具体的には、気圧センサから取得した気圧の値に基づいて、装着者の存在する高度を算出する(図2の(A)の(1)および図2の(B)参照)。また、加速度センサから取得した重力加速度情報に基づいて、当該位置検出携帯端末装置の傾き、すなわち、当該装着者の体の傾きを算出する(図2の(A)の(2)および図2の(B)参照)。また、磁気センサから地磁気ベクトルの情報を取得し(図2の(A)の(3)参照)、ジャイロセンサから装着者の体の回転量を取得する(図2の(A)の(4)参照)。なお、加速度センサが取得した3軸方向の加速度情報に基づいて、当該装着者の歩行の有無も判定するが(図2の(A)の(2)参照)、これについては後述する。
【0032】
そして、実施例1における位置検出携帯端末装置は、磁気センサから所定の時間ごとに取得した地磁気ベクトルの大きさの変化量である地磁気変化量を算出する。その際、実施例1における位置検出携帯端末装置は、図2の(B)に示すように、算出された当該位置検出携帯端末装置(当該装着者の体)の傾きに基づいて、所定の時間ごと(例えば、2秒ごと)に地磁気ベクトルの水平成分および垂直成分を取得し、当該所定の時間における(例えば、2秒間における)地磁気変化量として、地磁気ベクトルの水平成分および垂直成分の変化量である水平成分変化量および垂直成分変化量それぞれを算出する。
【0033】
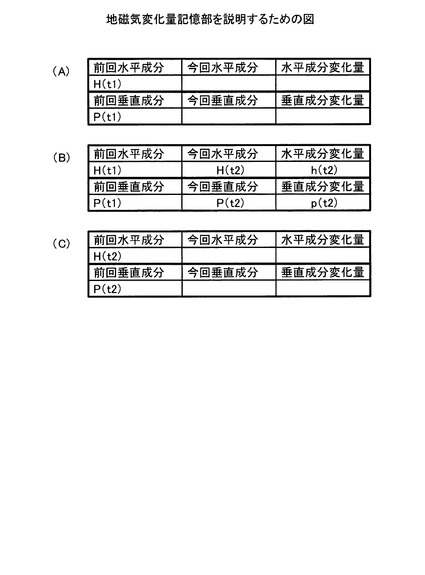
例えば、図2の(C)に示すように、「時刻:t1」での地磁気ベクトルにおける「水平成分」が「H(t1)」であり、「垂直成分」が「P(t1)」であり、さらに所定の時間後の「時刻:t2」での地磁気ベクトルにおける「水平成分」が「H(t2)」であり、「垂直成分」が「P(t2)」であった場合、実施例1における位置検出携帯端末装置は、「時刻:t2」における「水平成分変化量」として「|H(t2)−H(t1)|=h(t2)」を算出し、「時刻:t2」における「垂直成分変化量」として「|P(t2)−P(t1)|=p(t2)」を算出する。
【0034】
そして、実施例1における位置検出携帯端末装置は、判定された歩行の有無と、算出された高度と、地磁気変化量として算出された水平成分変化量および垂直成分変化量それぞれと、水平成分変化量および垂直成分変化量それぞれに対して予め高度ごとに設定された所定の閾値とに基づいて、装着者の方位を決定する。具体的には、「装着者の歩行有」と判定され、かつ、水平成分変化量が、算出された高度に対して設定された所定の閾値内であり、かつ、垂直成分変化量が、算出された高度に対して設定された所定の閾値内である場合には、磁気センサが取得した地磁気ベクトルから装着者の方位を決定する。また、水平成分変化量が、算出された高度に対して設定された所定の閾値外、または、垂直成分変化量が、算出された高度に対して設定された所定の閾値外である場合、および、「装着者の歩行無」と判定された場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位にジャイロセンサから取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定する。
【0035】
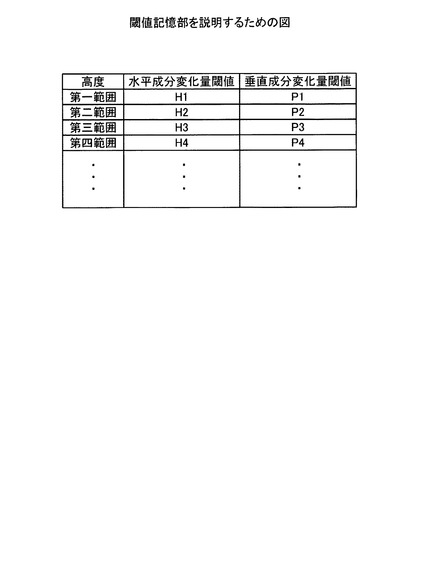
例えば、実施例1における位置検出携帯端末装置は、水平成分変化量および垂直成分変化量それぞれに対して予め高度ごとに設定された所定の閾値として、図2の(C)に示すように、「高度:第四範囲」に対応付けた閾値として「水平成分変化量閾値:H4」および「垂直成分変化量閾値:P4」などを記憶している。ここで、図2の(C)に示す「高度:第一範囲」や「高度:第四範囲」は、例えば、「高度:20m」ごとに設定された範囲であり、「高度:第一範囲」は、地表からの高度が「0mから20m」の範囲を示しており、「高度:第四範囲」は、地表からの高度が「60mから80m」の範囲を示しているとする。
【0036】
そして、「時刻:t2」における装着者の高度が、例えば、「65m」と算出された場合、実施例1における位置検出携帯端末装置は、図2の(C)に示すように、「時刻:t2」における「水平成分変化量:h(t2)」と「水平成分変化量閾値:H4」とを比較し、「時刻:t2」における「垂直成分変化量:p(t2)」と「垂直成分変化量閾値:P4」とを比較して、以下の3つの場合それぞれにおいて、方位を決定する。すなわち、加速度センサから取得した3軸の加速度情報から「時刻:t2」における「装着者の歩行有」と判定され、かつ、「水平成分変化量:h(t2)」が「水平成分変化量閾値:H4」以下であり、かつ、「垂直成分変化量:p(t2)」が「垂直成分変化量閾値:P4」以下である場合には、磁気センサが「時刻:t2」に取得した地磁気ベクトルから装着者の方位を決定する(図2の(D)の(5)参照)。
【0037】
また、「水平成分変化量:h(t2)」が「水平成分変化量閾値:H4」より大きい、または、「垂直成分変化量:p(t2)」が「垂直成分変化量閾値:P4」より大きい場合、もしくは、加速度センサから取得した3軸の加速度情報から「時刻:t2」における「装着者の歩行有」と判定された場合は、閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位にジャイロセンサから取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定する(図2の(D)の(6)および(7)参照)。ここで、例えば、「時刻:t1」おける「水平成分変化量」が「水平成分変化量閾値:H4」以下であり、かつ、「時刻:t1」における「垂直成分変化量」が「垂直成分変化量閾値:P4」以下であったので、磁気センサが「時刻:t1」に取得した地磁気ベクトルから装着者の方位として「南」が決定されていた場合(図2の(C)参照)、最新方位としての「南」にジャイロセンサから取得された回転量(例えば、45度)を加算した方位である回転量加算方位(例えば、南西)を装着者の方位として決定する。
【0038】
なお、本実施例では、地磁気変化量として、水平成分変化量および垂直成分変化量を分割してそれぞれ算出する場合について説明したが、本発明はこれに限定されるものではなく、より簡潔に、地磁気変化量として、地磁気ベクトルそのものの大きさの変化量のみを算出する場合であってもよい。この場合、地磁気ベクトルの大きさの変化量に対する閾値を1種類のみ保持し、当該閾値に基づいて方位を決定する。例えば、地磁気変化量が所定の閾値の範囲内である場合は、磁気センサが取得した地磁気ベクトルから装着者の方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、最新方位を装着者の方位として採用して決定したり、最新方位に取得された回転量を加算して装着者の方位を決定したりしてもよい。
【0039】
また、地磁気ベクトルそのものの大きさの変化量のみを算出する場合においても、歩行の有無をさらに判定し、地磁気変化量が所定の閾値の範囲内であり、かつ、装着者の歩行有と判定された場合は、磁気センサが取得した地磁気ベクトルから装着者の方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合、または、装着者の歩行無と判定された場合は、最新方位を装着者の方位として採用して決定したり、最新方位に取得された回転量を加算して装着者の方位を決定したりしてもよい。
【0040】
このようなことから、実施例1における位置検出携帯端末装置は、地点ごとの地磁気ベクトルの信頼度を判定するためのテーブルを別途保持せずに、地磁気変化量のみで磁気センサの取得した地磁気ベクトルの信頼度を容易に判定でき、上記した主たる特徴の通り、装着者の体の向きとしての方位を簡易に決定することが可能になる。なお、実施例1における位置検出携帯端末装置は、装着者の方位を決定した後、決定された方位と、加速度センサから取得した3軸の加速度情報から算出した移動方向および移動距離とを、装着者の位置情報を管理する管理センターに送信し、管理センターが当該装着者の位置を検出するが、本発明はこれに限定されるものではなく、位置検出携帯端末装置そのものが、方位、移動方向および移動距離から当該装着者の位置を検出する場合であってもよい。
【0041】
[実施例1における位置検出携帯端末装置の構成]
次に、図3〜9を用いて、実施例1における位置検出携帯端末装置を説明する。図3は、実施例1における位置検出携帯端末装置の構成を示すブロック図であり、図4は、加速度センサの出力例を説明するための図であり、図5は、磁気センサの出力例を説明するための図であり、図6は、気圧センサの出力例を説明するための図であり、図7は、ジャイロセンサの出力例を説明するための図であり、図8は、閾値記憶部を説明するための図であり、図9は、地磁気変化量記憶部を説明するための図である。
【0042】
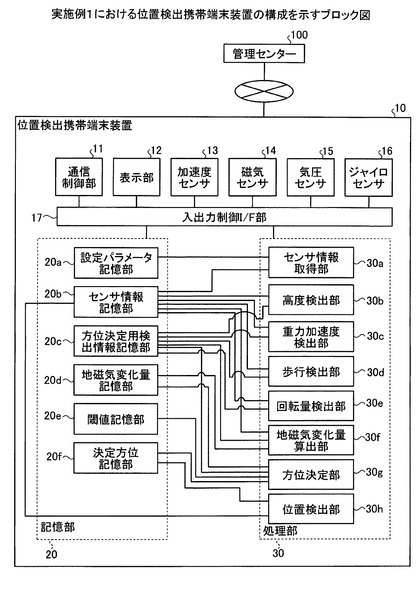
図3に示すように、実施例1における位置検出携帯端末装置10は、通信制御部11と、表示部12と、加速度センサ13と、磁気センサ14と、気圧センサ15と、ジャイロセンサ16と、入出力制御I/F部17と、記憶部20と、処理部30とから構成され、管理センター100と、例えば、無線通信によって接続される。
【0043】
管理センター100は、位置検出携帯端末装置10の装着者の位置情報を管理する。すなわち、管理センター100は、位置検出携帯端末装置10から受信した方位、移動方向および移動距離の情報を処理することにより、例えば、図1の(B)に示すように、装着者の位置情報を建物内の見取り図に対応付けた画像を作成して装着者の位置を把握するとともに、作成した画像を位置検出携帯端末装置10に送信する。
【0044】
通信制御部11は、他の装置との通信を制御し、特に本発明に密接に関連するものとしては、後述する方位決定部30gによって決定された装着者の方位と、後述する位置検出部30hによって検出された装着者の移動方向および移動距離とを管理センター100に転送したり、管理センター100において作成された装着者の位置情報を建物内の見取り図に対応付けた画像などを後述する表示部12に転送したりする。また、管理センター100から受信した各種センサのオフセット値およびゲイン値を後述する設定パラメータ記憶部20aに転送したり、管理センター100から受信した設定閾値を後述する閾値記憶部20eに転送したりする。
【0045】
表示部12は、各種の情報を出力し、特に本発明に密接に関連するものとしては、管理センター100から受信した装着者の位置情報を建物内の見取り図に対応付けた画像などを、液晶ディスプレイに表示したりする。
【0046】
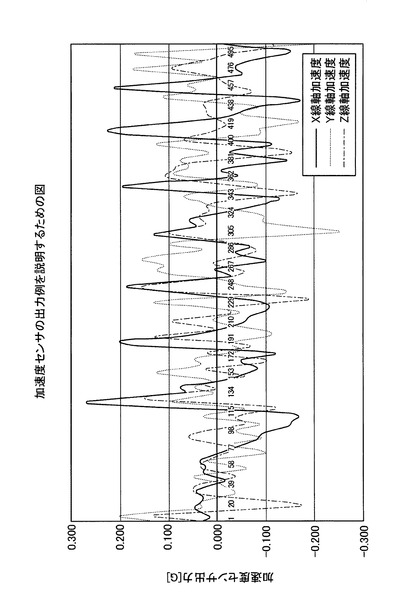
加速度センサ13は、3軸方向の加速度情報を取得し、さらに、地球の重力(重力加速度)を取得する。例えば、図4に示すように、装着者の体に対する3軸(X軸、Y軸およびZ軸)ごとの加速度(単位:G)を、単位時間あたりの時系列で取得する。
【0047】
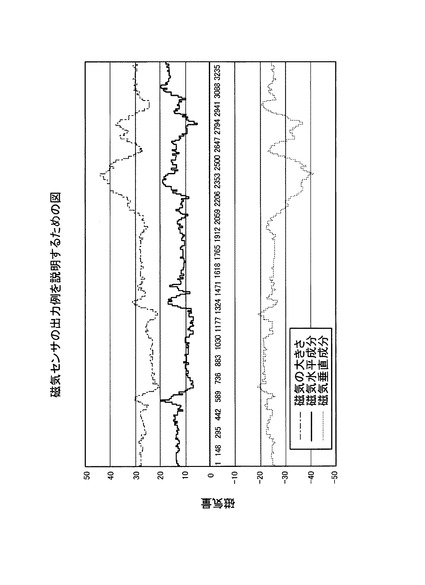
磁気センサ14は、地球の磁界の大きさおよび方向(3軸方向)の情報を含む地磁気ベクトルの情報を取得する。例えば、図5に示すように、地磁気ベクトルそのものの大きさである「磁気の大きさ」や、後述する重力加速度検出部30cが検出した装着者の体の傾きに基づいて算出された地磁気ベクトルの水平成分の大きさである「磁気水平成分」および垂直成分の大きさである「磁気垂直成分」を、単位時間あたりの時系列で取得する。
【0048】
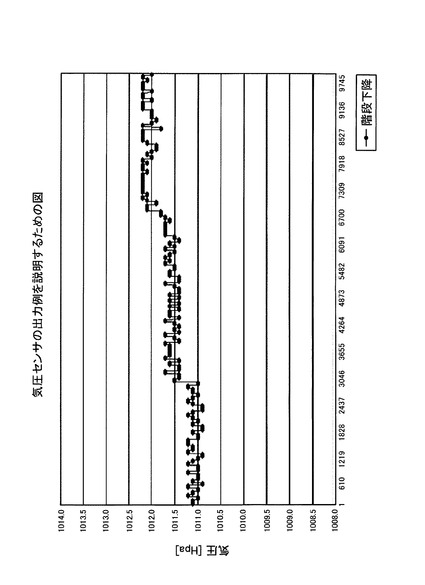
気圧センサ15は、高さ(高度)に応じて変動する気圧を取得する。例えば、位置検出携帯端末装置10の装着者が建物内の階段を下降している(高度が減少している)場合、図6に示すように、気圧センサ15の単位時間あたりの時系列で取得した出力結果から、時間経過に応じて、気圧(単位:Hpa)が上昇していることがわかる。
【0049】
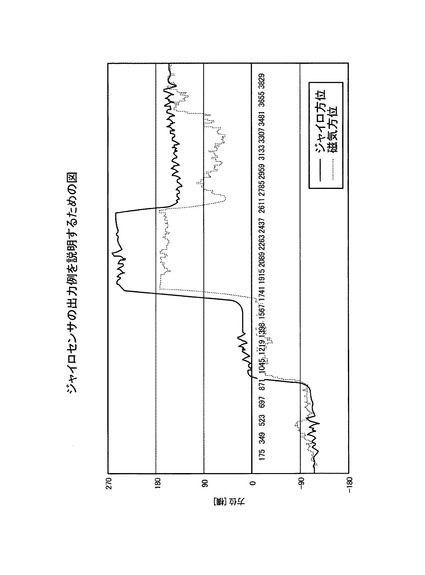
ジャイロセンサ16は、回転量を取得する。例えば、図7に示すように、ジャイロセンサ16が取得した回転量から、装着者の方位(単位:度)を時系列に応じて出力する。なお、図7において、「0度」は「北」を、「90度」は「東」を、「180度」は「南」を、「270度」は「西」を示している。また、図7においては、磁気センサ14の取得した地磁気ベクトルの情報を、装着者の方位(単位:度)として時系列に応じて出力した場合も併せて示している。
【0050】
記憶部20は、各種処理に必要なデータおよびプログラムを格納し、特に本発明に密接に関連するものとしては、図3に示すように、設定パラメータ記憶部20aと、センサ情報記憶部20bと、方位決定用検出情報記憶部20cと、地磁気変化量記憶部20dと、閾値記憶部20eと、決定方位記憶部20fとを備える。
【0051】
設定パラメータ記憶部20aは、各種センサごとに設定されたパラメータであるオフセット値およびゲイン値を記憶する。すなわち、設定パラメータ記憶部20aは、位置検出携帯端末装置10に備えられる加速度センサ13、磁気センサ14、気圧センサ15およびジャイロセンサ16それぞれのオフセット値およびゲイン値を記憶する。ここで、オフセット値およびゲイン値とは、センサが取得したアナログ情報をデジタル情報に変換する際に用いられる補正用のパラメータである。オフセット値は、ゼロ点補正を行なうためのパラメータである。また、ゲイン値は、個々のセンサごとの取得した値において生じる「ばらつき」を補正するためのパラメータであり、オフセット値によって補正された値にゲイン値を掛け合わせることにより、正確な値を算出する。例えば、加速度センサ13が地表において取得した重力加速度の情報をオフセット値およびゲイン値によって補正することで、正確な値である「1G」を取得することができる。
【0052】
閾値記憶部20eは、水平成分変化量および垂直成分変化量それぞれに対して高度ごとに設定された所定の閾値を記憶する。具体的には、図8に示すように、「高度:第四範囲」に対応付けた閾値として「水平成分変化量閾値:H4」および「垂直成分変化量閾値:P4」などを記憶している。例えば、「高度:第四範囲」に対応する「水平成分変化量閾値」を「5(単位:μT、マイクロテスラ)」として記憶し、「高度:第四範囲」に対応する「垂直成分変化量閾値」を「5(単位:μT、マイクロテスラ)」として記憶したりする。ここで、図8に示す「高度:第一範囲」や「高度:第四範囲」は、例えば、「高度:20m」ごとに設定された範囲であり、「高度:第一範囲」は、地表からの高度が「0mから20m」の範囲を示しており、「高度:第四範囲」は、地表からの高度が「60mから80m」の範囲を示しているとする。
【0053】
センサ情報記憶部20bは、後述するセンサ情報取得部30aが取得した情報を記憶し、方位決定用検出情報記憶部20cは、後述する「高度検出部30b、重力加速度検出部30c、歩行検出部30dおよび回転量検出部30e」が検出した結果それぞれを記憶し、地磁気変化量記憶部20dは、後述する地磁気変化量算出部30fが算出した結果を記憶し、決定方位記憶部20fは、後述する方位決定部30gが決定した装着者の方位を記憶する。なお、これらについては後に詳述する。
【0054】
処理部30は、OS(Operating System)などの制御プログラム、各種の処理手順などを規定したプログラムおよび所要データを格納するための内部メモリを有し、これらによって種々の処理を実行し、特に本発明に密接に関連するものとしては、図3に示すように、センサ情報取得部30aと、高度検出部30bと、重力加速度検出部30cと、歩行検出部30dと、回転量検出部30eと、地磁気変化量算出部30fと、方位決定部30gと、位置検出部30hとを備える。ここで、高度検出部30bは、特許請求の範囲に記載の「高度算出手段」に対応し、重力加速度検出部30cは、同じく「傾き算出手段」に対応し、歩行検出部30dは、同じく「歩行判定手段」に対応し、回転量検出部30eは、同じく「回転量取得手段」に対応し、地磁気変化量算出部30fは、同じく「地磁気変化量算出手段」に対応し、方位決定部30gは、同じく「方位決定手段」に対応する。
【0055】
センサ情報取得部30aは、各種センサ(加速度センサ13、磁気センサ14、気圧センサ15およびジャイロセンサ16)それぞれに設定された時間ごとに、各種センサからアナログ情報を取得し、設定パラメータ記憶部20aが記憶する各種センサごとに設定されたパラメータであるオフセット値およびゲイン値を用いて、取得したアナログ情報をデジタル情報に変換する。そして、センサ情報取得部30aは、変換したデータをセンサ情報記憶部20bに格納する。例えば、加速度センサ13に設定された時間が経過した場合に、加速度センサ13から取得したアナログ情報を、設定パラメータ記憶部20aが記憶する加速度センサ13のオフセット値およびゲイン値を用いて、デジタル情報に変換する。
【0056】
高度検出部30bは、センサ情報記憶部20bが記憶する「設定時間ごとに気圧センサ15から取得したアナログ情報から変換されたデジタル情報」を用いて、装着者が存在する高度を算出し、その結果を方位決定用検出情報記憶部20cに格納する。
【0057】
重力加速度検出部30cは、センサ情報記憶部20bが記憶する「設定時間ごとに加速度センサ13から取得したアナログ情報(重力加速度情報)から変換されたデジタル情報」を用いて、装着者の傾きを算出し、その結果を方位決定用検出情報記憶部20cに格納する。
【0058】
歩行検出部30dは、センサ情報記憶部20bが記憶する「設定時間ごとに加速度センサ13から取得したアナログ情報から変換されたデジタル情報(3軸の加速度情報)」を用いて、装着者の歩行の有無を判定し、その結果を方位決定用検出情報記憶部20cに格納する。
【0059】
回転量検出部30eは、センサ情報記憶部20bが記憶する「設定時間ごとにジャイロセンサ16から取得したアナログ情報から変換されたデジタル情報(回転量情報)」を用いて、装着者の体の回転量を算出し、その結果を方位決定用検出情報記憶部20cに格納する。
【0060】
地磁気変化量算出部30fは、センサ情報記憶部20bが記憶する「設定時間ごとに磁気センサ14から取得したアナログ情報から変換されたデジタル情報(地磁気ベクトル情報)」を用いて、地磁気ベクトルの大きさの変化量である地磁気変化量を算出し、その結果を地磁気変化量記憶部20dに格納する。その際、地磁気変化量算出部30fは、方位決定用検出情報記憶部20cが記憶する装着者の傾きに基づいて、地磁気ベクトルの水平成分および垂直成分を取得し、所定の時間における(例えば、2秒間における)地磁気変化量として、地磁気ベクトルの水平成分および垂直成分の変化量である水平成分変化量および垂直成分変化量それぞれを算出する。例えば、「時刻:t1」での地磁気ベクトルにおける「水平成分」が「H(t1)」であり、「垂直成分」が「P(t1)」であり、さらに所定の時間後の「時刻:t2」での地磁気ベクトルにおける「水平成分」が「H(t2)」であり、「垂直成分」が「P(t2)」であった場合、地磁気変化量算出部30fは、「時刻:t2」における「水平成分変化量」として「|H(t2)−H(t1)|=h(t2)」を算出し、「時刻:t2」における「垂直成分変化量」として「|P(t2)−P(t1)|=p(t2)」を算出する。
【0061】
ここで、地磁気変化量記憶部20dは、図9の(A)に示すように、例えば、前回水平成分として、「時刻:t1」における「水平成分:H(t1)」を、また、前回垂直成分として、「時刻:t1」における「垂直成分:P(t1)」を記憶している。そして、地磁気変化量算出部30fは、センサ情報記憶部20bが記憶する「時刻:t2」における地磁気ベクトル情報と装着者の傾きとに基づいて、「水平成分:H(t2)」および「垂直成分:P(t2)」を算出し、さらに、図9の(A)に示す地磁気変化量記憶部20dを参照して、「時刻:t2」における「水平成分変化量:h(t2)」および「時刻:t2」における「垂直成分変化量:p(t2)」を算出し、その結果を、「今回水平成分:H(t2)」および「今回垂直成分:P(t2)」とともに格納する(図9の(B)参照)。また、地磁気変化量算出部30fは、後述する方位決定部30gによって装着者の方位が決定された後は、今回水平成分および今回垂直成分のデータを、前回水平成分および前回垂直成分のデータとして地磁気変化量記憶部20dに再格納する。すなわち、図9の(C)に示すように、前回水平成分として、「時刻:t2」における「水平成分:H(t2)」を、また、前回垂直成分として、「時刻:t2」における「垂直成分:P(t2)」を地磁気変化量記憶部20dに再格納する。
【0062】
方位決定部30gは、方位決定用検出情報記憶部20cが記憶する「判定された装着者の歩行の有無」と、「算出された高度」と、地磁気変化量記憶部20dが記憶する「水平成分変化量および垂直成分変化量」と、閾値記憶部20eが記憶する「水平成分変化量および垂直成分変化量それぞれに対して予め高度ごとに設定された所定の閾値」とに基づいて、装着者の方位を決定し、その結果を決定方位記憶部20fに格納する。具体的には、方位決定部30gは、方位決定用検出情報記憶部20cおよび閾値記憶部20eが記憶する情報を参照して、「装着者の歩行有」であり、かつ、「水平成分変化量が、算出された高度に対して設定された所定の閾値内」であり、かつ、「垂直成分変化量が、算出された高度に対して設定された所定の閾値内」である場合には、センサ情報記憶部20bが記憶する磁気センサ14が取得した地磁気ベクトルのデジタル情報から装着者の方位を決定する。
【0063】
また、方位決定部30gは、方位決定用検出情報記憶部20cおよび閾値記憶部20eが記憶する情報を参照して、「水平成分変化量が、算出された高度に対して設定された所定の閾値外」、または、「垂直成分変化量が、算出された高度に対して設定された所定の閾値外」である場合、および、「装着者の歩行無」である場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位にジャイロセンサ16から取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定する。なお、地磁気ベクトルから算出されて決定された方位(最新方位)と、最新方位に回転量を加算した方位(回転量加算方位)とは、決定方位記憶部20fにおいて、それぞれ区別されて格納される。
【0064】
例えば、方位決定部30gは、「時刻:t2」における装着者の高度が、例えば、「65m」と算出された場合、「時刻:t2」における「水平成分変化量:h(t2)」と、図8に示す「水平成分変化量閾値:H4」とを比較し、「時刻:t2」における「垂直成分変化量:p(t2)」と、図8に示す「垂直成分変化量閾値:P4」とを比較して、以下の3つの場合それぞれにおいて、方位を決定する。すなわち、加速度センサ13から取得した3軸の加速度情報から「時刻:t2」における「装着者の歩行有」と判定され、かつ、「水平成分変化量:h(t2)」が「水平成分変化量閾値:H4」以下であり、かつ、「垂直成分変化量:p(t2)」が「垂直成分変化量閾値:P4」以下である場合には、磁気センサ14が「時刻:t2」に取得した地磁気ベクトルから装着者の方位を決定する。
【0065】
また、「水平成分変化量:h(t2)」が「水平成分変化量閾値:H4」より大きい、または、「垂直成分変化量:p(t2)」が「垂直成分変化量閾値:P4」より大きい場合、もしくは、加速度センサ13から取得した3軸の加速度情報から「時刻:t2」における「装着者の歩行有」と判定された場合は、決定方位記憶部20fを参照して、最新方位にジャイロセンサ16から取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定する。例えば、「時刻:t1」において決定された方位(南)が「最新方位」として決定方位記憶部20fに格納されている場合は、「最新方位」としての「南」にジャイロセンサ16から取得された回転量(例えば、45度)を加算した方位である回転量加算方位(例えば、南西)を装着者の方位として決定する。
【0066】
位置検出部30hは、センサ情報記憶部20bが記憶する加速度センサ13から取得したデジタル情報に基づいて、例えば、「時刻:t1」から「時刻:t2」の間の装着者の移動方向および移動距離を算出し、算出した移動方向および移動距離を、決定方位記憶部20fが記憶する「時刻:t2」における装着者の方位とともに、通信制御部11を介して、管理センター100に送信する。
【0067】
[実施例1における位置検出携帯端末装置による処理の手順]
次に、図10〜12を用いて、実施例1における位置検出携帯端末装置10による処理を説明する。図10は、実施例1における位置検出携帯端末装置の各種センサから情報を取得する処理を説明するための図であり、図11は、実施例1における位置検出携帯端末装置の方位決定処理を説明するための図であり、図12は、実施例1における位置検出携帯端末装置の位置検出処理を説明するための図である。
【0068】
[実施例1における位置検出携帯端末装置の各種センサから情報を取得する処理の手順]
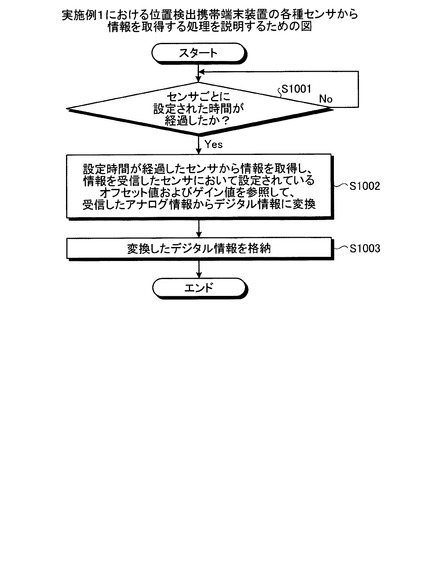
図10に示すように、まず、実施例1における位置検出携帯端末装置10は、センサごとに設定された時間が経過すると(ステップS1001肯定)、センサ情報取得部30aは、設定時間が経過したセンサから情報を取得し、情報を受信したセンサにおいて設定されているオフセット値およびゲイン値を参照して、受信したアナログ情報からデジタル情報に変換する(ステップS1002)。例えば、センサ情報取得部30aは、加速度センサ13に設定された時間が経過した場合に、加速度センサ13から取得したアナログ情報を、設定パラメータ記憶部20aが記憶する加速度センサ13のオフセット値およびゲイン値を用いて、デジタル情報に変換する。
【0069】
そして、センサ情報取得部30aは、変換したデジタル情報をセンサ情報記憶部20bに格納して(ステップS1003)、処理を終了する。
【0070】
[実施例1における位置検出携帯端末装置の方位決定処理の手順]
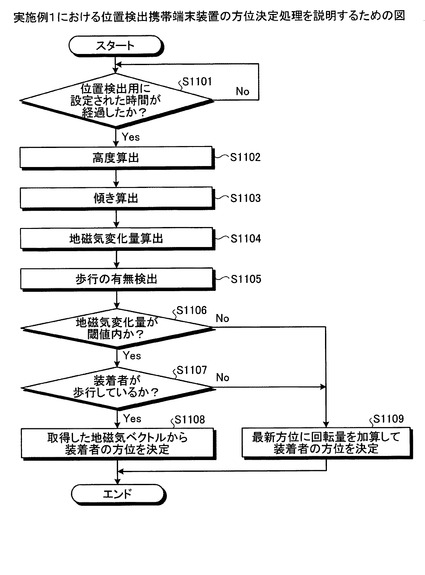
図11に示すように、まず、実施例1における位置検出携帯端末装置10は、位置検出用に設定された時間(例えば、2秒)が経過すると(ステップS1101肯定)、高度検出部30bは、センサ情報記憶部20bが記憶する「設定時間ごとに気圧センサ15から取得したアナログ情報から変換されたデジタル情報」を用いて、装着者が存在する高度を算出する(ステップS1102)。
【0071】
そして、重力加速度検出部30cは、センサ情報記憶部20bが記憶する「設定時間ごとに加速度センサ13から取得したアナログ情報(重力加速度情報)から変換されたデジタル情報」を用いて、装着者の傾きを算出する(ステップS1103)。
【0072】
続いて、地磁気変化量算出部30fは、センサ情報記憶部20bが記憶する「設定時間ごとに磁気センサ14から取得したアナログ情報から変換されたデジタル情報(地磁気ベクトル情報)」と、方位決定用検出情報記憶部20cが記憶する装着者の傾きに基づいて、所定の時間ごと(例えば、2秒ごと)に地磁気ベクトルの水平成分および垂直成分を取得し、当該所定の時間における(例えば、2秒間における)地磁気変化量として、地磁気ベクトルの水平成分および垂直成分の変化量である水平成分変化量および垂直成分変化量それぞれを算出する(ステップS1104)。
【0073】
そののち、歩行検出部30dは、センサ情報記憶部20bが記憶する「設定時間ごとに加速度センサ13から取得したアナログ情報から変換されたデジタル情報(3軸の加速度情報)」を用いて、装着者の歩行の有無を判定する(ステップS1105)。
【0074】
さらに、方位決定部30gは、地磁気変化量算出部30fが算出した地磁気変化量、すなわち水平成分変化量および垂直成分変化量が、閾値記憶部20eが記憶する閾値内であるか否かを判定する(ステップS1106)。
【0075】
そして、方位決定部30gは、地磁気変化量算出部30fが算出した水平成分変化量および垂直成分変化量ともに閾値記憶部20eが記憶する閾値内である場合には(ステップS1106肯定)、歩行検出部30dによって装着者が歩行しているとされているか否かを判定する(ステップS1107)。
【0076】
さらに、方位決定部30gは、歩行検出部30dによって装着者が歩行していると判定されている場合には(ステップS1107肯定)、磁気センサ14から取得した地磁気ベクトルから装着者の方位を決定して(ステップS1108)、処理を終了する。
【0077】
これに反して、方位決定部30gは、地磁気変化量算出部30fが算出した水平成分変化量または垂直成分変化量が、閾値記憶部20eが記憶する閾値外である場合(ステップS1106否定)、および、装着者が歩行していない場合には(ステップS1107否定)、最新方位に、回転量検出部30eが算出した装着者の体の回転量を加算して(回転量加算方位)、装着者の方位を決定し(ステップS1109)、処理を終了する。
【0078】
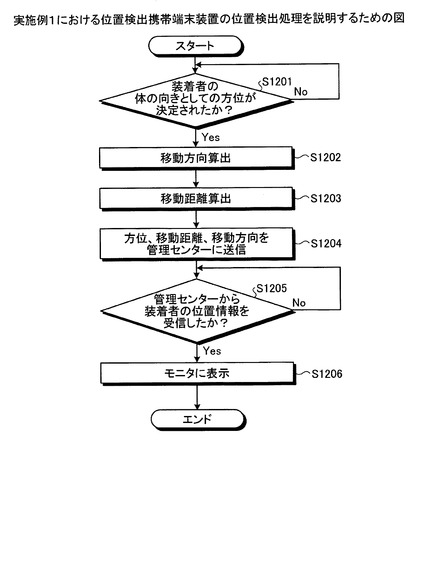
[実施例1における実施例1における位置検出携帯端末装置の位置検出処理の手順]
図12に示すように、まず、実施例1における位置検出携帯端末装置10は、方位決定部30gによって装着者の体の向きとしての方位が決定されると(ステップS1201肯定)、位置検出部30hは、センサ情報記憶部20bが記憶する加速度センサ13から取得したデジタル情報に基づいて、装着者の移動方向を算出する(ステップS1202)。
【0079】
そして、位置検出部30hは、センサ情報記憶部20bが記憶する加速度センサ13から取得したデジタル情報に基づいて、装着者の移動距離を算出する(ステップS1203)。
【0080】
さらに、位置検出部30hは、決定方位記憶部20fが記憶する装着者の方位と、算出された移動方向および移動距離とを、通信制御部11を介して、管理センター100に送信する(ステップS1204)。
【0081】
そののち、位置検出携帯端末装置10は、管理センター100から装着者の位置情報(例えば、装着者の位置情報を建物内の見取り図に対応付けた画像)を受信すると(ステップS1205肯定)、表示部12が備える液晶ディスプレイに、当該位置情報を表示して(ステップS1206)、処理を終了する。
【0082】
[実施例1の効果]
上記したように、実施例1によれば、気圧センサ15から装着者が存在する場所の高度を算出し、加速度センサ13から重力加速度を検知して装着者の体の傾きを算出し、同じく、加速度センサ13が取得した加速度情報から装着者の歩行の有無を判定する。そして、磁気センサ14から所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における地磁気ベクトルの大きさの変化量である地磁気変化量を算出するが、その際、算出された傾きに基づいて、地磁気ベクトルの水平成分および垂直成分を取得し、当該所定の時間における地磁気変化量として、地磁気ベクトルの水平成分および垂直成分の変化量である水平成分変化量および垂直成分変化量それぞれを算出する。そして、判定された歩行の有無と、算出された高度と、地磁気変化量として算出された水平成分変化量および垂直成分変化量それぞれと、水平成分変化量および垂直成分変化量それぞれに対して予め高度ごとに設定された所定の閾値とに基づいて、装着者の方位を決定する。すなわち、「装着者の歩行有」と判定され、かつ、水平成分変化量が、算出された高度に対して設定された所定の閾値内であり、かつ、垂直成分変化量が、算出された高度に対して設定された所定の閾値内である場合には、磁気センサ14が取得した地磁気ベクトルから装着者の方位を決定する。また、水平成分変化量が、算出された高度に対して設定された所定の閾値外、または、垂直成分変化量が、算出された高度に対して設定された所定の閾値外である場合、および、「装着者の歩行無」と判定された場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位にジャイロセンサ16から取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定する。
【0083】
このようなことから、地点ごとの地磁気ベクトルの信頼度を判定するためのテーブルを別途保持せずに、地磁気変化量のみで磁気センサの取得した地磁気ベクトルの信頼度を容易に判定でき、装着者の体の向きとしての方位を簡易に決定することが可能になる。また、例えば、周囲の環境によって磁気センサの取得した地磁気ベクトルの誤差が大きいにも係らず、歩行無であるために地磁気変化量が「0」である場合においても、取得した地磁気ベクトルを採用することを回避することができ、装着者の体の向きの方位を正確に決定することが可能になる。また、歩行無でありながら、装着者の体が回転している場合であっても、最新方位を修正することができ、装着者の体の向きの方位をより正確に決定することが可能になる。また、磁気センサ14の取得した地磁気ベクトルにおいて、周囲の環境によって生じる誤差による信頼度の低下を、水平成分変化量および垂直成分変化量に分けてそれぞれ詳細に判定することができ、装着者の体の向きの方位をより簡易に決定することが可能になる。さらに、高度変化にともなう地磁気ベクトルそのものの変化にも容易に対応でき、装着者の体の向きの方位をより簡易かつ正確に決定することが可能になる。
【実施例2】
【0084】
さて、これまで実施例1における位置検出携帯端末装置について説明したが、本発明は上述した実施例以外にも、種々の異なる形態にて実施されてもよいものである。そこで、以下では、実施例2における位置検出携帯端末装置として、種々の異なる実施例を(1)〜(2)に区分けして説明する。
【0085】
(1)システム構成等
上記の実施例1において説明した各処理のうち、自動的におこなわれるものとして説明した処理の全部または一部を手動でおこなうこともでき(例えば、位置検出用に設定された時間ごとに方位を決定するのではなく、管理センター100の管理者が方位決定の指示をするなどなど)、あるいは、手動的におこなうものとして説明した処理の全部または一部を公知の方法で自動的におこなうこともできる。この他、上記文章中や図面中で示した処理手順、具体的名称、各種のデータやパラメータを含む情報(例えば、磁気センサ14から地磁気ベクトルの情報を取得する所定の時間や、地磁気変化量の所定の閾値など)については、特記する場合を除いて任意に更新することができる。
【0086】
また、図示した各装置の各構成要素は機能概念的なものであり、必ずしも物理的に図示の如く構成されていることを要しない。すなわち、各処理部および各記憶部の分散・統合の具体的形態(例えば、図3の形態など)は図示のものに限られず、例えば、重力加速度検出部30cと歩行検出部30dとを統合するなど、その全部または一部を、各種の負荷や使用状況などに応じて、任意の単位で機能的または物理的に分散・統合して構成することができる。さらに、各装置にて行なわれる各処理機能は、その全部または任意の一部が、CPUおよび当該CPUにて解析実行されるプログラムにて実現され、あるいは、ワイヤードロジックによるハードウェアとして実現され得る。
【0087】
(2)方位決定プログラム
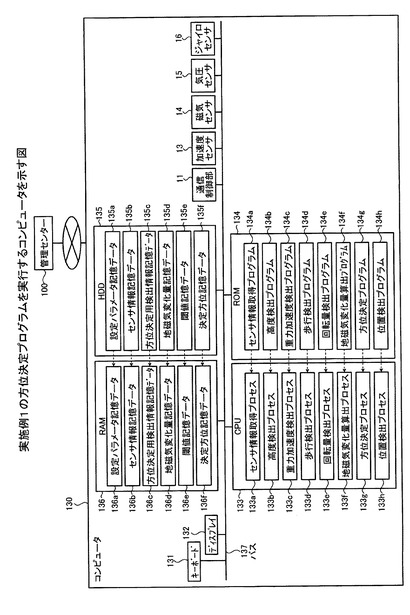
ところで上記の実施例1では、ハードウェアロジックによって各種の処理を実現する場合を説明したが、本発明はこれに限定されるものではなく、あらかじめ用意されたプログラムをコンピュータで実行するようにしてもよい。そこで以下では、図13を用いて、上記の実施例1に示した位置検出携帯端末装置10と同様の機能を有する方位決定プログラムを実行するコンピュータの一例を説明する。図13は、実施例1の方位決定プログラムを実行するコンピュータを示す図である。
【0088】
図13に示すように、情報処理装置としてのコンピュータ130は、キーボード131、ディスプレイ132、CPU133、ROM134、HDD135、RAM136、通信制御部11、加速度センサ13、磁気センサ14、気圧センサ15およびジャイロセンサ16をバス137などで接続して構成される。
【0089】
ROM134には、上記の実施例1に示した位置検出携帯端末装置10と同様の機能を発揮する方位決定プログラム、つまり、図13に示すように、センサ情報取得プログラム134a、高度検出プログラム134b、重力加速度検出プログラム134c、歩行検出プログラム134d、回転量検出プログラム134e、地磁気変化量算出プログラム134f、方位決定プログラム134g、位置検出プログラム134hが予め記憶されている。なお、これらのプログラム134a〜134hについては、図3に示した位置検出携帯端末装置10の各構成要素と同様、適宜統合または分散してもよい。
【0090】
そして、CPU133が、これらのプログラム134a〜134hをROM134から読みだして実行することで、図13に示すように、各プログラム134a〜134hは、センサ情報取得プロセス133a、高度検出プロセス133b、重力加速度検出プロセス133c、歩行検出プロセス133d、回転量検出プロセス133e、地磁気変化量算出プロセス133f、方位決定プロセス133g、位置検出プロセス133hとして機能するようになる。なお、各プロセス133a〜133hは、図3に示した、センサ情報取得部30a、高度検出部30b、重力加速度検出部30c、歩行検出部30d、回転量検出部30e、地磁気変化量算出部30f、方位決定部30g、位置検出部30hにそれぞれ対応する。
【0091】
また、HDD135には、図13に示すように、設定パラメータ記憶データ135aと、センサ情報記憶データ135bと、方位決定用検出情報記憶データ135cと、地磁気変化量記憶データ135dと、閾値記憶データ135eと、決定方位記憶データ135fとが設けられる。この設定パラメータ記憶データ135aは、図3に用いた設定パラメータ記憶部20aに対応し、センサ情報記憶データ135bはセンサ情報記憶部20bに対応し、地磁気変化量記憶データ135dは地磁気変化量記憶部20dに対応し、方位決定用検出情報記憶データ135cは方位決定用検出情報記憶部20cに対応し、閾値記憶データ135eは閾値記憶部20eに対応し、決定方位記憶データ135fは決定方位記憶部20fに対応する。そしてCPU133は、設定パラメータ記憶データ136aを設定パラメータ記憶データ135aに対して登録し、センサ情報記憶データ136bをセンサ情報記憶データ135bに対して登録し、方位決定用検出情報記憶データ136cを方位決定用検出情報記憶データ135cに対して登録し、地磁気変化量記憶データ136dを地磁気変化量記憶データ135dに対して登録し、閾値記憶データ136eを閾値記憶データ135eに対して登録し、決定方位記憶データ136fを決定方位記憶データ135fに対して登録し、この設定パラメータ記憶データ136aと、センサ情報記憶データ136bと、方位決定用検出情報記憶データ136cと、地磁気変化量記憶データ136dと、閾値記憶データ136eと、決定方位記憶データ136fとを読み出してRAM136に格納し、RAM136に格納された設定パラメータ記憶データ136aと、センサ情報記憶データ136bと、方位決定用検出情報記憶データ136cと、地磁気変化量記憶データ136dと、閾値記憶データ136eと、決定方位記憶データ136fとに基づいて方位決定処理を実行し、さらに位置検出処理を実行する。
【0092】
なお、上記した各プログラム134a〜134hについては、必ずしも最初からROM134に記憶させておく必要はなく、例えばコンピュータ130に挿入されるフレキシブルディスク(FD)、CD−ROM、MOディスク、DVDディスク、光磁気ディスク、ICカードなどの「可搬用の物理媒体」、または、コンピュータ130の内外に備えられるHDDなどの「固定用物理媒体」、さらには、公衆回線、インターネット、LAN、WANなどを介してコンピュータ130に接続される「他のコンピュータ(またはサーバ)」などに各プログラムを記憶させておき、コンピュータ130がこれらから各プログラムを読み出して実行するようにしてもよい。
【0093】
(付記1)磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出手段と、
前記地磁気変化量算出手段によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定手段と、
を備えたことを特徴とする位置検出携帯端末装置。
【0094】
(付記2)加速度センサが取得した加速度情報から前記装着者の歩行の有無を判定する歩行判定手段をさらに備え、
前記方位決定手段は、前記地磁気変化量算出手段によって算出された前記地磁気変化量が所定の閾値の範囲内であり、かつ、前記歩行判定手段によって前記装着者の歩行有と判定された場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合、または、前記歩行判定手段によって前記装着者の歩行無と判定された場合は、前記最新方位を前記装着者の前記方位として採用して決定することを特徴とする付記1に記載の位置検出携帯端末装置。
【0095】
(付記3)ジャイロセンサから前記装着者の回転量を取得する回転量取得手段をさらに備え、
前記方位決定手段は、前記地磁気変化量算出手段によって算出された前記地磁気変化量が所定の閾値の範囲外である場合は、前記最新方位に前記回転量取得手段によって取得された前記回転量を加算した方位である回転量加算方位を前記装着者の前記方位として決定することを特徴とする付記1に記載の位置検出携帯端末装置。
【0096】
(付記4)前記方位決定手段は、前記地磁気変化量算出手段によって算出された前記地磁気変化量が当該所定の閾値の範囲外である場合、または、前記歩行判定手段によって前記装着者の歩行無と判定された場合は、前記最新方位に前記回転量取得手段によって取得された前記回転量を加算した方位である回転量加算方位を前記装着者の前記方位として決定することを特徴とする付記2に記載の位置検出携帯端末装置。
【0097】
(付記5)前記加速度センサから重力加速度を検知して前記装着者の体の傾きを算出する傾き算出手段をさらに備え、
前記地磁気変化量算出手段は、前記傾き算出手段によって算出された前記傾きに基づいて、前記磁気センサから前記所定の時間ごとに前記地磁気ベクトルの水平成分および垂直成分を取得し、当該所定の時間における前記地磁気変化量として、前記地磁気ベクトルの水平成分および垂直成分の変化量である水平成分変化量および垂直成分変化量それぞれを算出し、
前記方位決定手段は、前記水平成分変化量および前記垂直成分変化量それぞれに設定された所定の閾値と、前記地磁気変化量算出手段によって算出された前記水平成分変化量および前記垂直成分変化量それぞれとに基づいて前記方位を決定することを特徴とする付記1〜4のいずれか一つに記載の位置検出携帯端末装置。
【0098】
(付記6)気圧センサから前記装着者が存在する場所の高度を算出する高度算出手段をさらに備え、
前記方位決定手段は、前記高度ごとに設定された所定の閾値と、前記地磁気変化量算出手段によって算出された前記地磁気変化量と、前記高度算出手段によって算出された前記高度とに基づいて前記方位を決定することを特徴とする付記1〜5のいずれか一つに記載の位置検出携帯端末装置。
【0099】
(付記7)装着者の体の向きとしての方位を決定する方位決定方法であって、
磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出工程と、
前記地磁気変化量算出工程によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定工程と、
を含んだことを特徴とする方位決定方法。
【0100】
(付記8)装着者の体の向きとしての方位を決定する方位決定方法をコンピュータに実行させる方位決定プログラムであって、
磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出手順と、
前記地磁気変化量算出手順によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定手順と、
をコンピュータに実行させることを特徴とする方位決定プログラム。
【産業上の利用可能性】
【0101】
以上のように、本発明に係る位置検出携帯端末装置、方位決定方法および方位決定プログラムは、装着者の体の向きとしての方位と、当該装着者の移動方向および移動距離とに基づいて当該装着者の位置を検出する場合に有用であり、特に、装着者の体の向きとしての方位を簡易に決定することが可能になることに適する。
【図面の簡単な説明】
【0102】
【図1】実施例1における位置検出携帯端末装置の概要を説明するための図である。
【図2】実施例1における位置検出携帯端末装置の特徴を説明するための図である。
【図3】実施例1における位置検出携帯端末装置の構成を示すブロック図である。
【図4】加速度センサの出力例を説明するための図である。
【図5】磁気センサの出力例を説明するための図である。
【図6】気圧センサの出力例を説明するための図である。
【図7】ジャイロセンサの出力例を説明するための図である。
【図8】閾値記憶部を説明するための図である。
【図9】地磁気変化量記憶部を説明するための図である。
【図10】実施例1における位置検出携帯端末装置の各種センサから情報を取得する処理を説明するための図である。
【図11】実施例1における位置検出携帯端末装置の方位決定処理を説明するための図である。
【図12】実施例1における位置検出携帯端末装置の位置検出処理を説明するための図である。
【図13】実施例1の方位決定プログラムを実行するコンピュータを示す図である。
【符号の説明】
【0103】
10 位置検出携帯端末装置
11 通信制御部
12 表示部
13 加速度センサ
14 磁気センサ
15 気圧センサ
16 ジャイロセンサ
17 入出力制御I/F部
20 記憶部
20a 設定パラメータ記憶部
20b センサ情報記憶部
20c 方位決定用検出情報記憶部
20d 地磁気変化量記憶部
20e 閾値記憶部
20f 決定方位記憶部
30 処理部
30a センサ情報取得部
30b 高度検出部
30c 重力加速度検出部
30d 歩行検出部
30e 回転量検出部
30f 地磁気変化量算出部
30g 方位決定部
30h 位置検出部
100 管理センター
【技術分野】
【0001】
この発明は、位置検出携帯端末装置、方位決定方法および方位決定プログラムに関する。
【背景技術】
【0002】
従来より、GPS(Global Positioning System)と自律航法とを組み合わせることにより、装着者の現在位置を連続的に検出する携帯端末装置が普及している。
【0003】
GPSは、GPS衛星からの信号を受信して、装着者の現在位置を検出するものであり、自律航法は、磁気センサが取得した地磁気ベクトルから装着者の身体の向き(方位)を算出し、加速度センサが取得した加速度情報から装着者の移動方向(前後左右)と移動距離を算出し、装着者の身体の向きと移動方向と移動距離から、装着者の現在位置を検出するものである。また、ジャイロセンサが取得した装着者の回転量も、装着者の身体の向き(方位)を算出する際に用いられる場合がある。
【0004】
ここで、装着者が建物内や建物の影を移動しているなど、GPS衛星からの信号を良好に受信できない場合、上記した携帯端末装置は、自律航法を用いることで連続的に当該装着者の現在位置を検出する。
【0005】
自律航法において、特許文献1では、移動距離を算出する際に用いられる歩幅を、加速度センサが取得した加速度情報に基づいて調整することにより、移動距離の算出精度を向上させる技術が開示されている。例えば、加速度が大きくなっている場合は、歩行リズムが早くなっていると判断し、歩幅を小さくするなどの調整を行なうことによって、移動距離の算出精度を向上させている。
【0006】
また、自律航法において、地磁気ベクトルから装着者の身体の向き(方位)を算出しているが、装着者の周囲に、建物の鉄筋やエレベータの駆動系など磁界を発生する要因が存在する場合は、磁気センサが取得する地磁気ベクトルに誤差が生じてしまう。そこで、特許文献2では、地点ごとに正確な地磁気ベクトルの情報をテーブルとして保持し、磁気センサが取得した地磁気ベクトルの情報の信頼度を、当該地磁気ベクトルの情報を取得した地点(例えば、GPSによって取得した地点)と、当該テーブルとを参照して判定する技術が開示されている。例えば、信頼度が低いと判定された場合は、警告を発することにより、算出された方位は信頼できないと装着者に報知する。
【0007】
さらに、特許文献3では、外部磁場によって磁気センサが取得する地磁気ベクトルに誤差が生じる場所を精度低下位置として予め登録しておき、精度低下位置においては方位の算出を停止することで、信頼度の低い方位を装着者に報知することを回避する技術が開示されている。
【0008】
【特許文献1】特開2000−97722号公報
【特許文献2】特許第3837533号公報
【特許文献3】特開2005−291935号公報
【発明の開示】
【発明が解決しようとする課題】
【0009】
ところで、上記した磁気センサによって算出される方位の信頼性を判定する従来の技術は、地点ごとの正確な地磁気ベクトルの情報や精度低下位置の情報などを、装着者が携帯端末装置を使用する可能性のある場所すべてにおいて保持しなければならないので、装着者の体の向きとしての方位を簡易に決定できないという問題点があった。
【0010】
そこで、この発明は、上述した従来技術の課題を解決するためになされたものであり、装着者の体の向きとしての方位を簡易に決定することが可能になる位置検出携帯端末装置、方位決定方法および方位決定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0011】
上述した課題を解決し、目的を達成するため、請求項1に係る発明は、磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出手段と、前記地磁気変化量算出手段によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定手段と、を備えたことを特徴とする。
【0012】
また、請求項2に係る発明は、上記の発明において、加速度センサが取得した加速度情報から前記装着者の歩行の有無を判定する歩行判定手段をさらに備え、前記方位決定手段は、前記地磁気変化量算出手段によって算出された地磁気変化量が所定の閾値の範囲内であり、かつ、前記歩行判定手段によって前記装着者の歩行有と判定された場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合、または、前記歩行判定手段によって前記装着者の歩行無と判定された場合は、前記最新方位を前記装着者の前記方位として採用して決定することを特徴とする。
【0013】
また、請求項3に係る発明は、上記の発明において、ジャイロセンサから前記装着者の回転量を取得する回転量取得手段をさらに備え、前記方位決定手段は、前記地磁気変化量算出手段によって算出された前記地磁気変化量が所定の閾値の範囲外である場合は、前記最新方位に前記回転量取得手段によって取得された前記回転量を加算した方位である回転量加算方位を前記装着者の前記方位として決定することを特徴とする。
【0014】
また、請求項4に係る発明は、上記の発明において、前記加速度センサから重力加速度を検知して前記装着者の体の傾きを算出する傾き算出手段をさらに備え、前記地磁気変化量算出手段は、前記傾き算出手段によって算出された前記傾きに基づいて、前記磁気センサから前記所定の時間ごとに前記地磁気ベクトルの水平成分および垂直成分を取得し、当該所定の時間における前記地磁気変化量として、前記地磁気ベクトルの水平成分および垂直成分の変化量である水平成分変化量および垂直成分変化量それぞれを算出し、前記方位決定手段は、前記水平成分変化量および前記垂直成分変化量それぞれに設定された所定の閾値と、前記地磁気変化量算出手段によって算出された前記水平成分変化量および前記垂直成分変化量それぞれとに基づいて前記方位を決定することを特徴とする。
【0015】
また、請求項5に係る発明は、上記の発明において、気圧センサから前記装着者が存在する場所の高度を算出する高度算出手段をさらに備え、前記方位決定手段は、前記高度ごとに設定された所定の閾値と、前記地磁気変化量算出手段によって算出された前記地磁気変化量と、前記高度算出手段によって算出された前記高度とに基づいて前記方位を決定することを特徴とする。
【0016】
また、請求項6に係る発明は、装着者の体の向きとしての方位を決定する方位決定方法であって、磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出工程と、前記地磁気変化量算出工程によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定工程と、を含んだことを特徴とする。
【0017】
また、請求項7に係る発明は、装着者の体の向きとしての方位を決定する方位決定方法をコンピュータに実行させる方位決定プログラムであって、磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出手順と、前記地磁気変化量算出手順によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定手順と、をコンピュータに実行させることを特徴とする。
【発明の効果】
【0018】
請求項1、6または7の発明によれば、磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における地磁気ベクトルの大きさの変化量である地磁気変化量を算出し、算出された地磁気変化量が所定の閾値の範囲内である場合は、磁気センサが取得した地磁気ベクトルから装着者の方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を装着者の方位として採用して決定するので、地点ごとの地磁気ベクトルの信頼度を判定するためのテーブルを別途保持せずに、地磁気変化量のみで磁気センサの取得した地磁気ベクトルの信頼度を容易に判定でき、装着者の体の向きとしての方位を簡易に決定することが可能になる。
【0019】
また、請求項2の発明によれば、加速度センサが取得した加速度情報から装着者の歩行の有無を判定し、算出された地磁気変化量が所定の閾値の範囲内であり、かつ、装着者の歩行有と判定された場合は、磁気センサが取得した地磁気ベクトルから装着者の方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合、または、装着者の歩行無と判定された場合は、最新方位を装着者の前記方位として採用して決定するので、例えば、周囲の環境によって磁気センサの取得した地磁気ベクトルの誤差が大きいにも係らず、歩行無であるために地磁気変化量が「0」である場合においても、取得した地磁気ベクトルを採用することを回避することができ、装着者の体の向きの方位を正確に決定することが可能になる。
【0020】
また、請求項3の発明によれば、ジャイロセンサから装着者の回転量を取得し、算出された地磁気変化量が所定の閾値の範囲外である場合は、最新方位にジャイロセンサから取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定するので、例えば、地磁気ベクトルの誤差が大きく信頼度が低い際に、装着者の体が回転している場合であっても、最新方位を修正することができ、装着者の体の向きの方位をより正確に決定することが可能になる。
【0021】
また、請求項4の発明によれば、加速度センサから重力加速度を検知して装着者の体の傾きを算出し、算出された傾きに基づいて、磁気センサから所定の時間ごとに地磁気ベクトルの水平成分および垂直成分を取得し、当該所定の時間における地磁気変化量として、地磁気ベクトルの水平成分および垂直成分の変化量である水平成分変化量および垂直成分変化量それぞれを算出し、水平成分変化量および垂直成分変化量それぞれに設定された所定の閾値と、算出された水平成分変化量および垂直成分変化量それぞれとに基づいて方位を決定するので、磁気センサの取得した地磁気ベクトルにおいて、周囲の環境によって生じる誤差による信頼度の低下を、水平成分変化量および垂直成分変化量に分けてそれぞれ詳細に判定することができ、装着者の体の向きの方位をより簡易に決定することが可能になる。
【0022】
また、請求項5の発明によれば、気圧センサから装着者が存在する場所の高度を算出し、高度ごとに設定された所定の閾値と、算出された地磁気変化量と、算出された高度とに基づいて前記方位を決定するので、さらに、高度変化にともなう地磁気ベクトルそのものの変化にも容易に対応でき、装着者の体の向きの方位をより簡易かつ正確に決定することが可能になる。
【発明を実施するための最良の形態】
【0023】
以下に添付図面を参照して、この発明に係る位置検出携帯端末装置、方位決定方法および方位決定プログラムの実施例を詳細に説明する。なお、以下では、実施例1における位置検出携帯端末装置の概要および特徴、実施例1における位置検出携帯端末装置の構成および処理の手順、実施例1の効果を順に説明し、最後に、他の実施例について説明する。
【実施例1】
【0024】
[用語の説明]
まず最初に、以下の実施例で用いる主要な用語を説明する。以下の実施例で用いる「磁気センサ」とは、地球の磁界の大きさおよび方向(3軸方向)の情報を含む地磁気ベクトルを取得するセンサのことであり、位置検出携帯端末装置は、「磁気センサ」が取得した地磁気ベクトルの情報に基づいて、当該位置検出携帯端末装置を装着する装着者の体の向きを算出して決定することができる。
【0025】
また、「加速度センサ」とは、3軸方向の加速度情報を取得するセンサのことであり、位置検出携帯端末装置は、「加速度センサ」が取得した装着者の体の移動によって生じる3軸方向の加速度情報に基づいて、当該装着者の移動方向(前後左右)および移動距離を算出することができる。例えば、位置検出携帯端末装置は、「加速度センサ」が取得した3軸それぞれの加速度情報の最大値と最小値の差である振幅値に基づいて、移動方向および移動距離を算出することができる。さらに「加速度センサ」は、地球の重力(重力加速度)を取得するセンサでもあり、位置検出携帯端末装置は、「加速度センサ」が取得した重力加速度情報に基づいて、当該位置検出携帯端末装置の傾き、すなわち、当該装着者の体の傾きを算出することができる。
【0026】
また、「気圧センサ」とは、高さ(高度)に応じて変動する気圧を取得するセンサであり、位置検出携帯端末装置は、「気圧センサ」が取得した気圧の値に基づいて、当該位置検出携帯端末装置の存在する高度、すなわち、当該装着者の存在する高度を算出することができる。また、「ジャイロセンサ」とは、回転量(具体的には、単位時間当たりの角速度)を取得するセンサであり、位置検出携帯端末装置は、「磁気センサ」が取得した地磁気ベクトルの情報と同様に、「ジャイロセンサ」が取得した回転量に基づいて、当該位置検出携帯端末装置を装着する装着者の体の向きを算出することができる。
【0027】
[実施例1における位置検出携帯端末装置の概要および特徴]
続いて、図1および図2を用いて、実施例1における位置検出携帯端末装置の主たる特徴を具体的に説明する。図1は、実施例1における位置検出携帯端末装置の概要を説明するための図であり、図2は、実施例1における位置検出携帯端末装置の特徴を説明するための図である。
【0028】
実施例1における位置検出携帯端末装置は、装着者の向きとしての方位と、当該装着者の移動方向および移動距離とに基づいて当該装着者の位置を検出することを概要とする。すなわち、実施例1における位置検出携帯端末装置は、図1の(A)に示すように、装着者の腰などに装着され、当該装着者の向きとしての方位、移動方向および移動距離とに基づいて当該装着者の位置を、自律的に検出する。すなわち、GPS衛星からの信号といった外部装置からの情報を用いることなく、実施例1における位置検出携帯端末装置自身が備える各種センサから取得した情報に基づいて、装着者の位置を、自律的に検出する。
【0029】
例えば、実施例1における位置検出携帯端末装置は、図1の(A)に示すように、「時刻:t1」における装着者の体の向きとしての方位(以下、方位と記す)を、磁気センサが取得した地磁気ベクトルの情報に基づいて、「方位(体の向き):南」として取得し、「時刻:t1」から「時刻:t2」の間における当該装着者の移動方向および移動距離を、加速度センサが取得した装着者の体の移動によって生じる3軸方向の加速度情報に基づいて、「移動方向:前」および「移動距離:Xm」として取得する。ここで、実施例1における位置検出携帯端末装置は、これら方位、移動方向および移動距離の情報を、例えば、装着者の位置情報を管理する管理センターに送信する。そして、当該管理センターは、これらの情報を処理することにより、例えば、図1の(B)に示すように、装着者の位置情報を建物内の見取り図に対応付けた画像を作成して装着者の位置を把握するともに、当該位置検出携帯端末装置に作成した画像を送信する。これにより、位置検出携帯端末装置の装着者も、自分の現在位置を把握することができる。
【0030】
なお、本実施例では、携帯端末装置が位置検出のみを専用に行なう場合について説明するが、本発明はこれに限られるものではなく、例えば、本発明を適用したPDA(Personal Digital Assistant)やPC(Personal Computer)などの携帯端末装置が位置検出をさらに行なう場合であってもよい。
【0031】
ここで、本発明は、装着者の体の向きとしての方位を簡易に決定することが可能になることに主たる特徴がある。この主たる特徴について簡単に説明すると、実施例1における位置検出携帯端末装置は、加速度センサ、ジャイロセンサ、磁気センサおよび気圧センサを備え、これら各種センサから取得した情報から方位決定に用いるデータを検出する。具体的には、気圧センサから取得した気圧の値に基づいて、装着者の存在する高度を算出する(図2の(A)の(1)および図2の(B)参照)。また、加速度センサから取得した重力加速度情報に基づいて、当該位置検出携帯端末装置の傾き、すなわち、当該装着者の体の傾きを算出する(図2の(A)の(2)および図2の(B)参照)。また、磁気センサから地磁気ベクトルの情報を取得し(図2の(A)の(3)参照)、ジャイロセンサから装着者の体の回転量を取得する(図2の(A)の(4)参照)。なお、加速度センサが取得した3軸方向の加速度情報に基づいて、当該装着者の歩行の有無も判定するが(図2の(A)の(2)参照)、これについては後述する。
【0032】
そして、実施例1における位置検出携帯端末装置は、磁気センサから所定の時間ごとに取得した地磁気ベクトルの大きさの変化量である地磁気変化量を算出する。その際、実施例1における位置検出携帯端末装置は、図2の(B)に示すように、算出された当該位置検出携帯端末装置(当該装着者の体)の傾きに基づいて、所定の時間ごと(例えば、2秒ごと)に地磁気ベクトルの水平成分および垂直成分を取得し、当該所定の時間における(例えば、2秒間における)地磁気変化量として、地磁気ベクトルの水平成分および垂直成分の変化量である水平成分変化量および垂直成分変化量それぞれを算出する。
【0033】
例えば、図2の(C)に示すように、「時刻:t1」での地磁気ベクトルにおける「水平成分」が「H(t1)」であり、「垂直成分」が「P(t1)」であり、さらに所定の時間後の「時刻:t2」での地磁気ベクトルにおける「水平成分」が「H(t2)」であり、「垂直成分」が「P(t2)」であった場合、実施例1における位置検出携帯端末装置は、「時刻:t2」における「水平成分変化量」として「|H(t2)−H(t1)|=h(t2)」を算出し、「時刻:t2」における「垂直成分変化量」として「|P(t2)−P(t1)|=p(t2)」を算出する。
【0034】
そして、実施例1における位置検出携帯端末装置は、判定された歩行の有無と、算出された高度と、地磁気変化量として算出された水平成分変化量および垂直成分変化量それぞれと、水平成分変化量および垂直成分変化量それぞれに対して予め高度ごとに設定された所定の閾値とに基づいて、装着者の方位を決定する。具体的には、「装着者の歩行有」と判定され、かつ、水平成分変化量が、算出された高度に対して設定された所定の閾値内であり、かつ、垂直成分変化量が、算出された高度に対して設定された所定の閾値内である場合には、磁気センサが取得した地磁気ベクトルから装着者の方位を決定する。また、水平成分変化量が、算出された高度に対して設定された所定の閾値外、または、垂直成分変化量が、算出された高度に対して設定された所定の閾値外である場合、および、「装着者の歩行無」と判定された場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位にジャイロセンサから取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定する。
【0035】
例えば、実施例1における位置検出携帯端末装置は、水平成分変化量および垂直成分変化量それぞれに対して予め高度ごとに設定された所定の閾値として、図2の(C)に示すように、「高度:第四範囲」に対応付けた閾値として「水平成分変化量閾値:H4」および「垂直成分変化量閾値:P4」などを記憶している。ここで、図2の(C)に示す「高度:第一範囲」や「高度:第四範囲」は、例えば、「高度:20m」ごとに設定された範囲であり、「高度:第一範囲」は、地表からの高度が「0mから20m」の範囲を示しており、「高度:第四範囲」は、地表からの高度が「60mから80m」の範囲を示しているとする。
【0036】
そして、「時刻:t2」における装着者の高度が、例えば、「65m」と算出された場合、実施例1における位置検出携帯端末装置は、図2の(C)に示すように、「時刻:t2」における「水平成分変化量:h(t2)」と「水平成分変化量閾値:H4」とを比較し、「時刻:t2」における「垂直成分変化量:p(t2)」と「垂直成分変化量閾値:P4」とを比較して、以下の3つの場合それぞれにおいて、方位を決定する。すなわち、加速度センサから取得した3軸の加速度情報から「時刻:t2」における「装着者の歩行有」と判定され、かつ、「水平成分変化量:h(t2)」が「水平成分変化量閾値:H4」以下であり、かつ、「垂直成分変化量:p(t2)」が「垂直成分変化量閾値:P4」以下である場合には、磁気センサが「時刻:t2」に取得した地磁気ベクトルから装着者の方位を決定する(図2の(D)の(5)参照)。
【0037】
また、「水平成分変化量:h(t2)」が「水平成分変化量閾値:H4」より大きい、または、「垂直成分変化量:p(t2)」が「垂直成分変化量閾値:P4」より大きい場合、もしくは、加速度センサから取得した3軸の加速度情報から「時刻:t2」における「装着者の歩行有」と判定された場合は、閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位にジャイロセンサから取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定する(図2の(D)の(6)および(7)参照)。ここで、例えば、「時刻:t1」おける「水平成分変化量」が「水平成分変化量閾値:H4」以下であり、かつ、「時刻:t1」における「垂直成分変化量」が「垂直成分変化量閾値:P4」以下であったので、磁気センサが「時刻:t1」に取得した地磁気ベクトルから装着者の方位として「南」が決定されていた場合(図2の(C)参照)、最新方位としての「南」にジャイロセンサから取得された回転量(例えば、45度)を加算した方位である回転量加算方位(例えば、南西)を装着者の方位として決定する。
【0038】
なお、本実施例では、地磁気変化量として、水平成分変化量および垂直成分変化量を分割してそれぞれ算出する場合について説明したが、本発明はこれに限定されるものではなく、より簡潔に、地磁気変化量として、地磁気ベクトルそのものの大きさの変化量のみを算出する場合であってもよい。この場合、地磁気ベクトルの大きさの変化量に対する閾値を1種類のみ保持し、当該閾値に基づいて方位を決定する。例えば、地磁気変化量が所定の閾値の範囲内である場合は、磁気センサが取得した地磁気ベクトルから装着者の方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、最新方位を装着者の方位として採用して決定したり、最新方位に取得された回転量を加算して装着者の方位を決定したりしてもよい。
【0039】
また、地磁気ベクトルそのものの大きさの変化量のみを算出する場合においても、歩行の有無をさらに判定し、地磁気変化量が所定の閾値の範囲内であり、かつ、装着者の歩行有と判定された場合は、磁気センサが取得した地磁気ベクトルから装着者の方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合、または、装着者の歩行無と判定された場合は、最新方位を装着者の方位として採用して決定したり、最新方位に取得された回転量を加算して装着者の方位を決定したりしてもよい。
【0040】
このようなことから、実施例1における位置検出携帯端末装置は、地点ごとの地磁気ベクトルの信頼度を判定するためのテーブルを別途保持せずに、地磁気変化量のみで磁気センサの取得した地磁気ベクトルの信頼度を容易に判定でき、上記した主たる特徴の通り、装着者の体の向きとしての方位を簡易に決定することが可能になる。なお、実施例1における位置検出携帯端末装置は、装着者の方位を決定した後、決定された方位と、加速度センサから取得した3軸の加速度情報から算出した移動方向および移動距離とを、装着者の位置情報を管理する管理センターに送信し、管理センターが当該装着者の位置を検出するが、本発明はこれに限定されるものではなく、位置検出携帯端末装置そのものが、方位、移動方向および移動距離から当該装着者の位置を検出する場合であってもよい。
【0041】
[実施例1における位置検出携帯端末装置の構成]
次に、図3〜9を用いて、実施例1における位置検出携帯端末装置を説明する。図3は、実施例1における位置検出携帯端末装置の構成を示すブロック図であり、図4は、加速度センサの出力例を説明するための図であり、図5は、磁気センサの出力例を説明するための図であり、図6は、気圧センサの出力例を説明するための図であり、図7は、ジャイロセンサの出力例を説明するための図であり、図8は、閾値記憶部を説明するための図であり、図9は、地磁気変化量記憶部を説明するための図である。
【0042】
図3に示すように、実施例1における位置検出携帯端末装置10は、通信制御部11と、表示部12と、加速度センサ13と、磁気センサ14と、気圧センサ15と、ジャイロセンサ16と、入出力制御I/F部17と、記憶部20と、処理部30とから構成され、管理センター100と、例えば、無線通信によって接続される。
【0043】
管理センター100は、位置検出携帯端末装置10の装着者の位置情報を管理する。すなわち、管理センター100は、位置検出携帯端末装置10から受信した方位、移動方向および移動距離の情報を処理することにより、例えば、図1の(B)に示すように、装着者の位置情報を建物内の見取り図に対応付けた画像を作成して装着者の位置を把握するとともに、作成した画像を位置検出携帯端末装置10に送信する。
【0044】
通信制御部11は、他の装置との通信を制御し、特に本発明に密接に関連するものとしては、後述する方位決定部30gによって決定された装着者の方位と、後述する位置検出部30hによって検出された装着者の移動方向および移動距離とを管理センター100に転送したり、管理センター100において作成された装着者の位置情報を建物内の見取り図に対応付けた画像などを後述する表示部12に転送したりする。また、管理センター100から受信した各種センサのオフセット値およびゲイン値を後述する設定パラメータ記憶部20aに転送したり、管理センター100から受信した設定閾値を後述する閾値記憶部20eに転送したりする。
【0045】
表示部12は、各種の情報を出力し、特に本発明に密接に関連するものとしては、管理センター100から受信した装着者の位置情報を建物内の見取り図に対応付けた画像などを、液晶ディスプレイに表示したりする。
【0046】
加速度センサ13は、3軸方向の加速度情報を取得し、さらに、地球の重力(重力加速度)を取得する。例えば、図4に示すように、装着者の体に対する3軸(X軸、Y軸およびZ軸)ごとの加速度(単位:G)を、単位時間あたりの時系列で取得する。
【0047】
磁気センサ14は、地球の磁界の大きさおよび方向(3軸方向)の情報を含む地磁気ベクトルの情報を取得する。例えば、図5に示すように、地磁気ベクトルそのものの大きさである「磁気の大きさ」や、後述する重力加速度検出部30cが検出した装着者の体の傾きに基づいて算出された地磁気ベクトルの水平成分の大きさである「磁気水平成分」および垂直成分の大きさである「磁気垂直成分」を、単位時間あたりの時系列で取得する。
【0048】
気圧センサ15は、高さ(高度)に応じて変動する気圧を取得する。例えば、位置検出携帯端末装置10の装着者が建物内の階段を下降している(高度が減少している)場合、図6に示すように、気圧センサ15の単位時間あたりの時系列で取得した出力結果から、時間経過に応じて、気圧(単位:Hpa)が上昇していることがわかる。
【0049】
ジャイロセンサ16は、回転量を取得する。例えば、図7に示すように、ジャイロセンサ16が取得した回転量から、装着者の方位(単位:度)を時系列に応じて出力する。なお、図7において、「0度」は「北」を、「90度」は「東」を、「180度」は「南」を、「270度」は「西」を示している。また、図7においては、磁気センサ14の取得した地磁気ベクトルの情報を、装着者の方位(単位:度)として時系列に応じて出力した場合も併せて示している。
【0050】
記憶部20は、各種処理に必要なデータおよびプログラムを格納し、特に本発明に密接に関連するものとしては、図3に示すように、設定パラメータ記憶部20aと、センサ情報記憶部20bと、方位決定用検出情報記憶部20cと、地磁気変化量記憶部20dと、閾値記憶部20eと、決定方位記憶部20fとを備える。
【0051】
設定パラメータ記憶部20aは、各種センサごとに設定されたパラメータであるオフセット値およびゲイン値を記憶する。すなわち、設定パラメータ記憶部20aは、位置検出携帯端末装置10に備えられる加速度センサ13、磁気センサ14、気圧センサ15およびジャイロセンサ16それぞれのオフセット値およびゲイン値を記憶する。ここで、オフセット値およびゲイン値とは、センサが取得したアナログ情報をデジタル情報に変換する際に用いられる補正用のパラメータである。オフセット値は、ゼロ点補正を行なうためのパラメータである。また、ゲイン値は、個々のセンサごとの取得した値において生じる「ばらつき」を補正するためのパラメータであり、オフセット値によって補正された値にゲイン値を掛け合わせることにより、正確な値を算出する。例えば、加速度センサ13が地表において取得した重力加速度の情報をオフセット値およびゲイン値によって補正することで、正確な値である「1G」を取得することができる。
【0052】
閾値記憶部20eは、水平成分変化量および垂直成分変化量それぞれに対して高度ごとに設定された所定の閾値を記憶する。具体的には、図8に示すように、「高度:第四範囲」に対応付けた閾値として「水平成分変化量閾値:H4」および「垂直成分変化量閾値:P4」などを記憶している。例えば、「高度:第四範囲」に対応する「水平成分変化量閾値」を「5(単位:μT、マイクロテスラ)」として記憶し、「高度:第四範囲」に対応する「垂直成分変化量閾値」を「5(単位:μT、マイクロテスラ)」として記憶したりする。ここで、図8に示す「高度:第一範囲」や「高度:第四範囲」は、例えば、「高度:20m」ごとに設定された範囲であり、「高度:第一範囲」は、地表からの高度が「0mから20m」の範囲を示しており、「高度:第四範囲」は、地表からの高度が「60mから80m」の範囲を示しているとする。
【0053】
センサ情報記憶部20bは、後述するセンサ情報取得部30aが取得した情報を記憶し、方位決定用検出情報記憶部20cは、後述する「高度検出部30b、重力加速度検出部30c、歩行検出部30dおよび回転量検出部30e」が検出した結果それぞれを記憶し、地磁気変化量記憶部20dは、後述する地磁気変化量算出部30fが算出した結果を記憶し、決定方位記憶部20fは、後述する方位決定部30gが決定した装着者の方位を記憶する。なお、これらについては後に詳述する。
【0054】
処理部30は、OS(Operating System)などの制御プログラム、各種の処理手順などを規定したプログラムおよび所要データを格納するための内部メモリを有し、これらによって種々の処理を実行し、特に本発明に密接に関連するものとしては、図3に示すように、センサ情報取得部30aと、高度検出部30bと、重力加速度検出部30cと、歩行検出部30dと、回転量検出部30eと、地磁気変化量算出部30fと、方位決定部30gと、位置検出部30hとを備える。ここで、高度検出部30bは、特許請求の範囲に記載の「高度算出手段」に対応し、重力加速度検出部30cは、同じく「傾き算出手段」に対応し、歩行検出部30dは、同じく「歩行判定手段」に対応し、回転量検出部30eは、同じく「回転量取得手段」に対応し、地磁気変化量算出部30fは、同じく「地磁気変化量算出手段」に対応し、方位決定部30gは、同じく「方位決定手段」に対応する。
【0055】
センサ情報取得部30aは、各種センサ(加速度センサ13、磁気センサ14、気圧センサ15およびジャイロセンサ16)それぞれに設定された時間ごとに、各種センサからアナログ情報を取得し、設定パラメータ記憶部20aが記憶する各種センサごとに設定されたパラメータであるオフセット値およびゲイン値を用いて、取得したアナログ情報をデジタル情報に変換する。そして、センサ情報取得部30aは、変換したデータをセンサ情報記憶部20bに格納する。例えば、加速度センサ13に設定された時間が経過した場合に、加速度センサ13から取得したアナログ情報を、設定パラメータ記憶部20aが記憶する加速度センサ13のオフセット値およびゲイン値を用いて、デジタル情報に変換する。
【0056】
高度検出部30bは、センサ情報記憶部20bが記憶する「設定時間ごとに気圧センサ15から取得したアナログ情報から変換されたデジタル情報」を用いて、装着者が存在する高度を算出し、その結果を方位決定用検出情報記憶部20cに格納する。
【0057】
重力加速度検出部30cは、センサ情報記憶部20bが記憶する「設定時間ごとに加速度センサ13から取得したアナログ情報(重力加速度情報)から変換されたデジタル情報」を用いて、装着者の傾きを算出し、その結果を方位決定用検出情報記憶部20cに格納する。
【0058】
歩行検出部30dは、センサ情報記憶部20bが記憶する「設定時間ごとに加速度センサ13から取得したアナログ情報から変換されたデジタル情報(3軸の加速度情報)」を用いて、装着者の歩行の有無を判定し、その結果を方位決定用検出情報記憶部20cに格納する。
【0059】
回転量検出部30eは、センサ情報記憶部20bが記憶する「設定時間ごとにジャイロセンサ16から取得したアナログ情報から変換されたデジタル情報(回転量情報)」を用いて、装着者の体の回転量を算出し、その結果を方位決定用検出情報記憶部20cに格納する。
【0060】
地磁気変化量算出部30fは、センサ情報記憶部20bが記憶する「設定時間ごとに磁気センサ14から取得したアナログ情報から変換されたデジタル情報(地磁気ベクトル情報)」を用いて、地磁気ベクトルの大きさの変化量である地磁気変化量を算出し、その結果を地磁気変化量記憶部20dに格納する。その際、地磁気変化量算出部30fは、方位決定用検出情報記憶部20cが記憶する装着者の傾きに基づいて、地磁気ベクトルの水平成分および垂直成分を取得し、所定の時間における(例えば、2秒間における)地磁気変化量として、地磁気ベクトルの水平成分および垂直成分の変化量である水平成分変化量および垂直成分変化量それぞれを算出する。例えば、「時刻:t1」での地磁気ベクトルにおける「水平成分」が「H(t1)」であり、「垂直成分」が「P(t1)」であり、さらに所定の時間後の「時刻:t2」での地磁気ベクトルにおける「水平成分」が「H(t2)」であり、「垂直成分」が「P(t2)」であった場合、地磁気変化量算出部30fは、「時刻:t2」における「水平成分変化量」として「|H(t2)−H(t1)|=h(t2)」を算出し、「時刻:t2」における「垂直成分変化量」として「|P(t2)−P(t1)|=p(t2)」を算出する。
【0061】
ここで、地磁気変化量記憶部20dは、図9の(A)に示すように、例えば、前回水平成分として、「時刻:t1」における「水平成分:H(t1)」を、また、前回垂直成分として、「時刻:t1」における「垂直成分:P(t1)」を記憶している。そして、地磁気変化量算出部30fは、センサ情報記憶部20bが記憶する「時刻:t2」における地磁気ベクトル情報と装着者の傾きとに基づいて、「水平成分:H(t2)」および「垂直成分:P(t2)」を算出し、さらに、図9の(A)に示す地磁気変化量記憶部20dを参照して、「時刻:t2」における「水平成分変化量:h(t2)」および「時刻:t2」における「垂直成分変化量:p(t2)」を算出し、その結果を、「今回水平成分:H(t2)」および「今回垂直成分:P(t2)」とともに格納する(図9の(B)参照)。また、地磁気変化量算出部30fは、後述する方位決定部30gによって装着者の方位が決定された後は、今回水平成分および今回垂直成分のデータを、前回水平成分および前回垂直成分のデータとして地磁気変化量記憶部20dに再格納する。すなわち、図9の(C)に示すように、前回水平成分として、「時刻:t2」における「水平成分:H(t2)」を、また、前回垂直成分として、「時刻:t2」における「垂直成分:P(t2)」を地磁気変化量記憶部20dに再格納する。
【0062】
方位決定部30gは、方位決定用検出情報記憶部20cが記憶する「判定された装着者の歩行の有無」と、「算出された高度」と、地磁気変化量記憶部20dが記憶する「水平成分変化量および垂直成分変化量」と、閾値記憶部20eが記憶する「水平成分変化量および垂直成分変化量それぞれに対して予め高度ごとに設定された所定の閾値」とに基づいて、装着者の方位を決定し、その結果を決定方位記憶部20fに格納する。具体的には、方位決定部30gは、方位決定用検出情報記憶部20cおよび閾値記憶部20eが記憶する情報を参照して、「装着者の歩行有」であり、かつ、「水平成分変化量が、算出された高度に対して設定された所定の閾値内」であり、かつ、「垂直成分変化量が、算出された高度に対して設定された所定の閾値内」である場合には、センサ情報記憶部20bが記憶する磁気センサ14が取得した地磁気ベクトルのデジタル情報から装着者の方位を決定する。
【0063】
また、方位決定部30gは、方位決定用検出情報記憶部20cおよび閾値記憶部20eが記憶する情報を参照して、「水平成分変化量が、算出された高度に対して設定された所定の閾値外」、または、「垂直成分変化量が、算出された高度に対して設定された所定の閾値外」である場合、および、「装着者の歩行無」である場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位にジャイロセンサ16から取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定する。なお、地磁気ベクトルから算出されて決定された方位(最新方位)と、最新方位に回転量を加算した方位(回転量加算方位)とは、決定方位記憶部20fにおいて、それぞれ区別されて格納される。
【0064】
例えば、方位決定部30gは、「時刻:t2」における装着者の高度が、例えば、「65m」と算出された場合、「時刻:t2」における「水平成分変化量:h(t2)」と、図8に示す「水平成分変化量閾値:H4」とを比較し、「時刻:t2」における「垂直成分変化量:p(t2)」と、図8に示す「垂直成分変化量閾値:P4」とを比較して、以下の3つの場合それぞれにおいて、方位を決定する。すなわち、加速度センサ13から取得した3軸の加速度情報から「時刻:t2」における「装着者の歩行有」と判定され、かつ、「水平成分変化量:h(t2)」が「水平成分変化量閾値:H4」以下であり、かつ、「垂直成分変化量:p(t2)」が「垂直成分変化量閾値:P4」以下である場合には、磁気センサ14が「時刻:t2」に取得した地磁気ベクトルから装着者の方位を決定する。
【0065】
また、「水平成分変化量:h(t2)」が「水平成分変化量閾値:H4」より大きい、または、「垂直成分変化量:p(t2)」が「垂直成分変化量閾値:P4」より大きい場合、もしくは、加速度センサ13から取得した3軸の加速度情報から「時刻:t2」における「装着者の歩行有」と判定された場合は、決定方位記憶部20fを参照して、最新方位にジャイロセンサ16から取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定する。例えば、「時刻:t1」において決定された方位(南)が「最新方位」として決定方位記憶部20fに格納されている場合は、「最新方位」としての「南」にジャイロセンサ16から取得された回転量(例えば、45度)を加算した方位である回転量加算方位(例えば、南西)を装着者の方位として決定する。
【0066】
位置検出部30hは、センサ情報記憶部20bが記憶する加速度センサ13から取得したデジタル情報に基づいて、例えば、「時刻:t1」から「時刻:t2」の間の装着者の移動方向および移動距離を算出し、算出した移動方向および移動距離を、決定方位記憶部20fが記憶する「時刻:t2」における装着者の方位とともに、通信制御部11を介して、管理センター100に送信する。
【0067】
[実施例1における位置検出携帯端末装置による処理の手順]
次に、図10〜12を用いて、実施例1における位置検出携帯端末装置10による処理を説明する。図10は、実施例1における位置検出携帯端末装置の各種センサから情報を取得する処理を説明するための図であり、図11は、実施例1における位置検出携帯端末装置の方位決定処理を説明するための図であり、図12は、実施例1における位置検出携帯端末装置の位置検出処理を説明するための図である。
【0068】
[実施例1における位置検出携帯端末装置の各種センサから情報を取得する処理の手順]
図10に示すように、まず、実施例1における位置検出携帯端末装置10は、センサごとに設定された時間が経過すると(ステップS1001肯定)、センサ情報取得部30aは、設定時間が経過したセンサから情報を取得し、情報を受信したセンサにおいて設定されているオフセット値およびゲイン値を参照して、受信したアナログ情報からデジタル情報に変換する(ステップS1002)。例えば、センサ情報取得部30aは、加速度センサ13に設定された時間が経過した場合に、加速度センサ13から取得したアナログ情報を、設定パラメータ記憶部20aが記憶する加速度センサ13のオフセット値およびゲイン値を用いて、デジタル情報に変換する。
【0069】
そして、センサ情報取得部30aは、変換したデジタル情報をセンサ情報記憶部20bに格納して(ステップS1003)、処理を終了する。
【0070】
[実施例1における位置検出携帯端末装置の方位決定処理の手順]
図11に示すように、まず、実施例1における位置検出携帯端末装置10は、位置検出用に設定された時間(例えば、2秒)が経過すると(ステップS1101肯定)、高度検出部30bは、センサ情報記憶部20bが記憶する「設定時間ごとに気圧センサ15から取得したアナログ情報から変換されたデジタル情報」を用いて、装着者が存在する高度を算出する(ステップS1102)。
【0071】
そして、重力加速度検出部30cは、センサ情報記憶部20bが記憶する「設定時間ごとに加速度センサ13から取得したアナログ情報(重力加速度情報)から変換されたデジタル情報」を用いて、装着者の傾きを算出する(ステップS1103)。
【0072】
続いて、地磁気変化量算出部30fは、センサ情報記憶部20bが記憶する「設定時間ごとに磁気センサ14から取得したアナログ情報から変換されたデジタル情報(地磁気ベクトル情報)」と、方位決定用検出情報記憶部20cが記憶する装着者の傾きに基づいて、所定の時間ごと(例えば、2秒ごと)に地磁気ベクトルの水平成分および垂直成分を取得し、当該所定の時間における(例えば、2秒間における)地磁気変化量として、地磁気ベクトルの水平成分および垂直成分の変化量である水平成分変化量および垂直成分変化量それぞれを算出する(ステップS1104)。
【0073】
そののち、歩行検出部30dは、センサ情報記憶部20bが記憶する「設定時間ごとに加速度センサ13から取得したアナログ情報から変換されたデジタル情報(3軸の加速度情報)」を用いて、装着者の歩行の有無を判定する(ステップS1105)。
【0074】
さらに、方位決定部30gは、地磁気変化量算出部30fが算出した地磁気変化量、すなわち水平成分変化量および垂直成分変化量が、閾値記憶部20eが記憶する閾値内であるか否かを判定する(ステップS1106)。
【0075】
そして、方位決定部30gは、地磁気変化量算出部30fが算出した水平成分変化量および垂直成分変化量ともに閾値記憶部20eが記憶する閾値内である場合には(ステップS1106肯定)、歩行検出部30dによって装着者が歩行しているとされているか否かを判定する(ステップS1107)。
【0076】
さらに、方位決定部30gは、歩行検出部30dによって装着者が歩行していると判定されている場合には(ステップS1107肯定)、磁気センサ14から取得した地磁気ベクトルから装着者の方位を決定して(ステップS1108)、処理を終了する。
【0077】
これに反して、方位決定部30gは、地磁気変化量算出部30fが算出した水平成分変化量または垂直成分変化量が、閾値記憶部20eが記憶する閾値外である場合(ステップS1106否定)、および、装着者が歩行していない場合には(ステップS1107否定)、最新方位に、回転量検出部30eが算出した装着者の体の回転量を加算して(回転量加算方位)、装着者の方位を決定し(ステップS1109)、処理を終了する。
【0078】
[実施例1における実施例1における位置検出携帯端末装置の位置検出処理の手順]
図12に示すように、まず、実施例1における位置検出携帯端末装置10は、方位決定部30gによって装着者の体の向きとしての方位が決定されると(ステップS1201肯定)、位置検出部30hは、センサ情報記憶部20bが記憶する加速度センサ13から取得したデジタル情報に基づいて、装着者の移動方向を算出する(ステップS1202)。
【0079】
そして、位置検出部30hは、センサ情報記憶部20bが記憶する加速度センサ13から取得したデジタル情報に基づいて、装着者の移動距離を算出する(ステップS1203)。
【0080】
さらに、位置検出部30hは、決定方位記憶部20fが記憶する装着者の方位と、算出された移動方向および移動距離とを、通信制御部11を介して、管理センター100に送信する(ステップS1204)。
【0081】
そののち、位置検出携帯端末装置10は、管理センター100から装着者の位置情報(例えば、装着者の位置情報を建物内の見取り図に対応付けた画像)を受信すると(ステップS1205肯定)、表示部12が備える液晶ディスプレイに、当該位置情報を表示して(ステップS1206)、処理を終了する。
【0082】
[実施例1の効果]
上記したように、実施例1によれば、気圧センサ15から装着者が存在する場所の高度を算出し、加速度センサ13から重力加速度を検知して装着者の体の傾きを算出し、同じく、加速度センサ13が取得した加速度情報から装着者の歩行の有無を判定する。そして、磁気センサ14から所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における地磁気ベクトルの大きさの変化量である地磁気変化量を算出するが、その際、算出された傾きに基づいて、地磁気ベクトルの水平成分および垂直成分を取得し、当該所定の時間における地磁気変化量として、地磁気ベクトルの水平成分および垂直成分の変化量である水平成分変化量および垂直成分変化量それぞれを算出する。そして、判定された歩行の有無と、算出された高度と、地磁気変化量として算出された水平成分変化量および垂直成分変化量それぞれと、水平成分変化量および垂直成分変化量それぞれに対して予め高度ごとに設定された所定の閾値とに基づいて、装着者の方位を決定する。すなわち、「装着者の歩行有」と判定され、かつ、水平成分変化量が、算出された高度に対して設定された所定の閾値内であり、かつ、垂直成分変化量が、算出された高度に対して設定された所定の閾値内である場合には、磁気センサ14が取得した地磁気ベクトルから装着者の方位を決定する。また、水平成分変化量が、算出された高度に対して設定された所定の閾値外、または、垂直成分変化量が、算出された高度に対して設定された所定の閾値外である場合、および、「装着者の歩行無」と判定された場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位にジャイロセンサ16から取得された回転量を加算した方位である回転量加算方位を装着者の方位として決定する。
【0083】
このようなことから、地点ごとの地磁気ベクトルの信頼度を判定するためのテーブルを別途保持せずに、地磁気変化量のみで磁気センサの取得した地磁気ベクトルの信頼度を容易に判定でき、装着者の体の向きとしての方位を簡易に決定することが可能になる。また、例えば、周囲の環境によって磁気センサの取得した地磁気ベクトルの誤差が大きいにも係らず、歩行無であるために地磁気変化量が「0」である場合においても、取得した地磁気ベクトルを採用することを回避することができ、装着者の体の向きの方位を正確に決定することが可能になる。また、歩行無でありながら、装着者の体が回転している場合であっても、最新方位を修正することができ、装着者の体の向きの方位をより正確に決定することが可能になる。また、磁気センサ14の取得した地磁気ベクトルにおいて、周囲の環境によって生じる誤差による信頼度の低下を、水平成分変化量および垂直成分変化量に分けてそれぞれ詳細に判定することができ、装着者の体の向きの方位をより簡易に決定することが可能になる。さらに、高度変化にともなう地磁気ベクトルそのものの変化にも容易に対応でき、装着者の体の向きの方位をより簡易かつ正確に決定することが可能になる。
【実施例2】
【0084】
さて、これまで実施例1における位置検出携帯端末装置について説明したが、本発明は上述した実施例以外にも、種々の異なる形態にて実施されてもよいものである。そこで、以下では、実施例2における位置検出携帯端末装置として、種々の異なる実施例を(1)〜(2)に区分けして説明する。
【0085】
(1)システム構成等
上記の実施例1において説明した各処理のうち、自動的におこなわれるものとして説明した処理の全部または一部を手動でおこなうこともでき(例えば、位置検出用に設定された時間ごとに方位を決定するのではなく、管理センター100の管理者が方位決定の指示をするなどなど)、あるいは、手動的におこなうものとして説明した処理の全部または一部を公知の方法で自動的におこなうこともできる。この他、上記文章中や図面中で示した処理手順、具体的名称、各種のデータやパラメータを含む情報(例えば、磁気センサ14から地磁気ベクトルの情報を取得する所定の時間や、地磁気変化量の所定の閾値など)については、特記する場合を除いて任意に更新することができる。
【0086】
また、図示した各装置の各構成要素は機能概念的なものであり、必ずしも物理的に図示の如く構成されていることを要しない。すなわち、各処理部および各記憶部の分散・統合の具体的形態(例えば、図3の形態など)は図示のものに限られず、例えば、重力加速度検出部30cと歩行検出部30dとを統合するなど、その全部または一部を、各種の負荷や使用状況などに応じて、任意の単位で機能的または物理的に分散・統合して構成することができる。さらに、各装置にて行なわれる各処理機能は、その全部または任意の一部が、CPUおよび当該CPUにて解析実行されるプログラムにて実現され、あるいは、ワイヤードロジックによるハードウェアとして実現され得る。
【0087】
(2)方位決定プログラム
ところで上記の実施例1では、ハードウェアロジックによって各種の処理を実現する場合を説明したが、本発明はこれに限定されるものではなく、あらかじめ用意されたプログラムをコンピュータで実行するようにしてもよい。そこで以下では、図13を用いて、上記の実施例1に示した位置検出携帯端末装置10と同様の機能を有する方位決定プログラムを実行するコンピュータの一例を説明する。図13は、実施例1の方位決定プログラムを実行するコンピュータを示す図である。
【0088】
図13に示すように、情報処理装置としてのコンピュータ130は、キーボード131、ディスプレイ132、CPU133、ROM134、HDD135、RAM136、通信制御部11、加速度センサ13、磁気センサ14、気圧センサ15およびジャイロセンサ16をバス137などで接続して構成される。
【0089】
ROM134には、上記の実施例1に示した位置検出携帯端末装置10と同様の機能を発揮する方位決定プログラム、つまり、図13に示すように、センサ情報取得プログラム134a、高度検出プログラム134b、重力加速度検出プログラム134c、歩行検出プログラム134d、回転量検出プログラム134e、地磁気変化量算出プログラム134f、方位決定プログラム134g、位置検出プログラム134hが予め記憶されている。なお、これらのプログラム134a〜134hについては、図3に示した位置検出携帯端末装置10の各構成要素と同様、適宜統合または分散してもよい。
【0090】
そして、CPU133が、これらのプログラム134a〜134hをROM134から読みだして実行することで、図13に示すように、各プログラム134a〜134hは、センサ情報取得プロセス133a、高度検出プロセス133b、重力加速度検出プロセス133c、歩行検出プロセス133d、回転量検出プロセス133e、地磁気変化量算出プロセス133f、方位決定プロセス133g、位置検出プロセス133hとして機能するようになる。なお、各プロセス133a〜133hは、図3に示した、センサ情報取得部30a、高度検出部30b、重力加速度検出部30c、歩行検出部30d、回転量検出部30e、地磁気変化量算出部30f、方位決定部30g、位置検出部30hにそれぞれ対応する。
【0091】
また、HDD135には、図13に示すように、設定パラメータ記憶データ135aと、センサ情報記憶データ135bと、方位決定用検出情報記憶データ135cと、地磁気変化量記憶データ135dと、閾値記憶データ135eと、決定方位記憶データ135fとが設けられる。この設定パラメータ記憶データ135aは、図3に用いた設定パラメータ記憶部20aに対応し、センサ情報記憶データ135bはセンサ情報記憶部20bに対応し、地磁気変化量記憶データ135dは地磁気変化量記憶部20dに対応し、方位決定用検出情報記憶データ135cは方位決定用検出情報記憶部20cに対応し、閾値記憶データ135eは閾値記憶部20eに対応し、決定方位記憶データ135fは決定方位記憶部20fに対応する。そしてCPU133は、設定パラメータ記憶データ136aを設定パラメータ記憶データ135aに対して登録し、センサ情報記憶データ136bをセンサ情報記憶データ135bに対して登録し、方位決定用検出情報記憶データ136cを方位決定用検出情報記憶データ135cに対して登録し、地磁気変化量記憶データ136dを地磁気変化量記憶データ135dに対して登録し、閾値記憶データ136eを閾値記憶データ135eに対して登録し、決定方位記憶データ136fを決定方位記憶データ135fに対して登録し、この設定パラメータ記憶データ136aと、センサ情報記憶データ136bと、方位決定用検出情報記憶データ136cと、地磁気変化量記憶データ136dと、閾値記憶データ136eと、決定方位記憶データ136fとを読み出してRAM136に格納し、RAM136に格納された設定パラメータ記憶データ136aと、センサ情報記憶データ136bと、方位決定用検出情報記憶データ136cと、地磁気変化量記憶データ136dと、閾値記憶データ136eと、決定方位記憶データ136fとに基づいて方位決定処理を実行し、さらに位置検出処理を実行する。
【0092】
なお、上記した各プログラム134a〜134hについては、必ずしも最初からROM134に記憶させておく必要はなく、例えばコンピュータ130に挿入されるフレキシブルディスク(FD)、CD−ROM、MOディスク、DVDディスク、光磁気ディスク、ICカードなどの「可搬用の物理媒体」、または、コンピュータ130の内外に備えられるHDDなどの「固定用物理媒体」、さらには、公衆回線、インターネット、LAN、WANなどを介してコンピュータ130に接続される「他のコンピュータ(またはサーバ)」などに各プログラムを記憶させておき、コンピュータ130がこれらから各プログラムを読み出して実行するようにしてもよい。
【0093】
(付記1)磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出手段と、
前記地磁気変化量算出手段によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定手段と、
を備えたことを特徴とする位置検出携帯端末装置。
【0094】
(付記2)加速度センサが取得した加速度情報から前記装着者の歩行の有無を判定する歩行判定手段をさらに備え、
前記方位決定手段は、前記地磁気変化量算出手段によって算出された前記地磁気変化量が所定の閾値の範囲内であり、かつ、前記歩行判定手段によって前記装着者の歩行有と判定された場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合、または、前記歩行判定手段によって前記装着者の歩行無と判定された場合は、前記最新方位を前記装着者の前記方位として採用して決定することを特徴とする付記1に記載の位置検出携帯端末装置。
【0095】
(付記3)ジャイロセンサから前記装着者の回転量を取得する回転量取得手段をさらに備え、
前記方位決定手段は、前記地磁気変化量算出手段によって算出された前記地磁気変化量が所定の閾値の範囲外である場合は、前記最新方位に前記回転量取得手段によって取得された前記回転量を加算した方位である回転量加算方位を前記装着者の前記方位として決定することを特徴とする付記1に記載の位置検出携帯端末装置。
【0096】
(付記4)前記方位決定手段は、前記地磁気変化量算出手段によって算出された前記地磁気変化量が当該所定の閾値の範囲外である場合、または、前記歩行判定手段によって前記装着者の歩行無と判定された場合は、前記最新方位に前記回転量取得手段によって取得された前記回転量を加算した方位である回転量加算方位を前記装着者の前記方位として決定することを特徴とする付記2に記載の位置検出携帯端末装置。
【0097】
(付記5)前記加速度センサから重力加速度を検知して前記装着者の体の傾きを算出する傾き算出手段をさらに備え、
前記地磁気変化量算出手段は、前記傾き算出手段によって算出された前記傾きに基づいて、前記磁気センサから前記所定の時間ごとに前記地磁気ベクトルの水平成分および垂直成分を取得し、当該所定の時間における前記地磁気変化量として、前記地磁気ベクトルの水平成分および垂直成分の変化量である水平成分変化量および垂直成分変化量それぞれを算出し、
前記方位決定手段は、前記水平成分変化量および前記垂直成分変化量それぞれに設定された所定の閾値と、前記地磁気変化量算出手段によって算出された前記水平成分変化量および前記垂直成分変化量それぞれとに基づいて前記方位を決定することを特徴とする付記1〜4のいずれか一つに記載の位置検出携帯端末装置。
【0098】
(付記6)気圧センサから前記装着者が存在する場所の高度を算出する高度算出手段をさらに備え、
前記方位決定手段は、前記高度ごとに設定された所定の閾値と、前記地磁気変化量算出手段によって算出された前記地磁気変化量と、前記高度算出手段によって算出された前記高度とに基づいて前記方位を決定することを特徴とする付記1〜5のいずれか一つに記載の位置検出携帯端末装置。
【0099】
(付記7)装着者の体の向きとしての方位を決定する方位決定方法であって、
磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出工程と、
前記地磁気変化量算出工程によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定工程と、
を含んだことを特徴とする方位決定方法。
【0100】
(付記8)装着者の体の向きとしての方位を決定する方位決定方法をコンピュータに実行させる方位決定プログラムであって、
磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出手順と、
前記地磁気変化量算出手順によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定手順と、
をコンピュータに実行させることを特徴とする方位決定プログラム。
【産業上の利用可能性】
【0101】
以上のように、本発明に係る位置検出携帯端末装置、方位決定方法および方位決定プログラムは、装着者の体の向きとしての方位と、当該装着者の移動方向および移動距離とに基づいて当該装着者の位置を検出する場合に有用であり、特に、装着者の体の向きとしての方位を簡易に決定することが可能になることに適する。
【図面の簡単な説明】
【0102】
【図1】実施例1における位置検出携帯端末装置の概要を説明するための図である。
【図2】実施例1における位置検出携帯端末装置の特徴を説明するための図である。
【図3】実施例1における位置検出携帯端末装置の構成を示すブロック図である。
【図4】加速度センサの出力例を説明するための図である。
【図5】磁気センサの出力例を説明するための図である。
【図6】気圧センサの出力例を説明するための図である。
【図7】ジャイロセンサの出力例を説明するための図である。
【図8】閾値記憶部を説明するための図である。
【図9】地磁気変化量記憶部を説明するための図である。
【図10】実施例1における位置検出携帯端末装置の各種センサから情報を取得する処理を説明するための図である。
【図11】実施例1における位置検出携帯端末装置の方位決定処理を説明するための図である。
【図12】実施例1における位置検出携帯端末装置の位置検出処理を説明するための図である。
【図13】実施例1の方位決定プログラムを実行するコンピュータを示す図である。
【符号の説明】
【0103】
10 位置検出携帯端末装置
11 通信制御部
12 表示部
13 加速度センサ
14 磁気センサ
15 気圧センサ
16 ジャイロセンサ
17 入出力制御I/F部
20 記憶部
20a 設定パラメータ記憶部
20b センサ情報記憶部
20c 方位決定用検出情報記憶部
20d 地磁気変化量記憶部
20e 閾値記憶部
20f 決定方位記憶部
30 処理部
30a センサ情報取得部
30b 高度検出部
30c 重力加速度検出部
30d 歩行検出部
30e 回転量検出部
30f 地磁気変化量算出部
30g 方位決定部
30h 位置検出部
100 管理センター
【特許請求の範囲】
【請求項1】
磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出手段と、
前記地磁気変化量算出手段によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定手段と、
を備えたことを特徴とする位置検出携帯端末装置。
【請求項2】
加速度センサが取得した加速度情報から前記装着者の歩行の有無を判定する歩行判定手段をさらに備え、
前記方位決定手段は、前記地磁気変化量算出手段によって算出された前記地磁気変化量が所定の閾値の範囲内であり、かつ、前記歩行判定手段によって前記装着者の歩行有と判定された場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合、または、前記歩行判定手段によって前記装着者の歩行無と判定された場合は、前記最新方位を前記装着者の前記方位として採用して決定することを特徴とする請求項1に記載の位置検出携帯端末装置。
【請求項3】
ジャイロセンサから前記装着者の回転量を取得する回転量取得手段をさらに備え、
前記方位決定手段は、前記地磁気変化量算出手段によって算出された前記地磁気変化量が所定の閾値の範囲外である場合は、前記最新方位に前記回転量取得手段によって取得された前記回転量を加算した方位である回転量加算方位を前記装着者の前記方位として決定することを特徴とする請求項1に記載の位置検出携帯端末装置。
【請求項4】
前記加速度センサから重力加速度を検知して前記装着者の体の傾きを算出する傾き算出手段をさらに備え、
前記地磁気変化量算出手段は、前記傾き算出手段によって算出された前記傾きに基づいて、前記磁気センサから前記所定の時間ごとに前記地磁気ベクトルの水平成分および垂直成分を取得し、当該所定の時間における前記地磁気変化量として、前記地磁気ベクトルの水平成分および垂直成分の変化量である水平成分変化量および垂直成分変化量それぞれを算出し、
前記方位決定手段は、前記水平成分変化量および前記垂直成分変化量それぞれに設定された所定の閾値と、前記地磁気変化量算出手段によって算出された前記水平成分変化量および前記垂直成分変化量それぞれとに基づいて前記方位を決定することを特徴とする請求項1〜3のいずれか一つに記載の位置検出携帯端末装置。
【請求項5】
気圧センサから前記装着者が存在する場所の高度を算出する高度算出手段をさらに備え、
前記方位決定手段は、前記高度ごとに設定された所定の閾値と、前記地磁気変化量算出手段によって算出された前記地磁気変化量と、前記高度算出手段によって算出された前記高度とに基づいて前記方位を決定することを特徴とする請求項1〜4のいずれか一つに記載の位置検出携帯端末装置。
【請求項6】
装着者の体の向きとしての方位を決定する方位決定方法であって、
磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出工程と、
前記地磁気変化量算出工程によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定工程と、
を含んだことを特徴とする方位決定方法。
【請求項7】
装着者の体の向きとしての方位を決定する方位決定方法をコンピュータに実行させる方位決定プログラムであって、
磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出手順と、
前記地磁気変化量算出手順によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定手順と、
をコンピュータに実行させることを特徴とする方位決定プログラム。
【請求項1】
磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出手段と、
前記地磁気変化量算出手段によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の地磁気変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定手段と、
を備えたことを特徴とする位置検出携帯端末装置。
【請求項2】
加速度センサが取得した加速度情報から前記装着者の歩行の有無を判定する歩行判定手段をさらに備え、
前記方位決定手段は、前記地磁気変化量算出手段によって算出された前記地磁気変化量が所定の閾値の範囲内であり、かつ、前記歩行判定手段によって前記装着者の歩行有と判定された場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合、または、前記歩行判定手段によって前記装着者の歩行無と判定された場合は、前記最新方位を前記装着者の前記方位として採用して決定することを特徴とする請求項1に記載の位置検出携帯端末装置。
【請求項3】
ジャイロセンサから前記装着者の回転量を取得する回転量取得手段をさらに備え、
前記方位決定手段は、前記地磁気変化量算出手段によって算出された前記地磁気変化量が所定の閾値の範囲外である場合は、前記最新方位に前記回転量取得手段によって取得された前記回転量を加算した方位である回転量加算方位を前記装着者の前記方位として決定することを特徴とする請求項1に記載の位置検出携帯端末装置。
【請求項4】
前記加速度センサから重力加速度を検知して前記装着者の体の傾きを算出する傾き算出手段をさらに備え、
前記地磁気変化量算出手段は、前記傾き算出手段によって算出された前記傾きに基づいて、前記磁気センサから前記所定の時間ごとに前記地磁気ベクトルの水平成分および垂直成分を取得し、当該所定の時間における前記地磁気変化量として、前記地磁気ベクトルの水平成分および垂直成分の変化量である水平成分変化量および垂直成分変化量それぞれを算出し、
前記方位決定手段は、前記水平成分変化量および前記垂直成分変化量それぞれに設定された所定の閾値と、前記地磁気変化量算出手段によって算出された前記水平成分変化量および前記垂直成分変化量それぞれとに基づいて前記方位を決定することを特徴とする請求項1〜3のいずれか一つに記載の位置検出携帯端末装置。
【請求項5】
気圧センサから前記装着者が存在する場所の高度を算出する高度算出手段をさらに備え、
前記方位決定手段は、前記高度ごとに設定された所定の閾値と、前記地磁気変化量算出手段によって算出された前記地磁気変化量と、前記高度算出手段によって算出された前記高度とに基づいて前記方位を決定することを特徴とする請求項1〜4のいずれか一つに記載の位置検出携帯端末装置。
【請求項6】
装着者の体の向きとしての方位を決定する方位決定方法であって、
磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出工程と、
前記地磁気変化量算出工程によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定工程と、
を含んだことを特徴とする方位決定方法。
【請求項7】
装着者の体の向きとしての方位を決定する方位決定方法をコンピュータに実行させる方位決定プログラムであって、
磁気センサから所定の時間ごとに地磁気ベクトルを取得し、当該所定の時間における前記地磁気ベクトルの大きさの変化量である地磁気変化量を算出する地磁気変化量算出手順と、
前記地磁気変化量算出手順によって算出された地磁気変化量が所定の閾値の範囲内である場合は、前記磁気センサが取得した前記地磁気ベクトルから前記装着者の前記方位を決定し、当該地磁気変化量が当該所定の閾値の範囲外である場合は、当該所定の閾値の範囲内の変化量を示した最新の地磁気ベクトルから決定された方位である最新方位を前記装着者の前記方位として採用して決定する方位決定手順と、
をコンピュータに実行させることを特徴とする方位決定プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2008−281494(P2008−281494A)
【公開日】平成20年11月20日(2008.11.20)
【国際特許分類】
【出願番号】特願2007−127326(P2007−127326)
【出願日】平成19年5月11日(2007.5.11)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成20年11月20日(2008.11.20)
【国際特許分類】
【出願日】平成19年5月11日(2007.5.11)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]