
位置検出用治具
【課題】狭い搬送口を有する装置に対しても搬入可能な位置検出用ウェハを用いて、搬送アームの搬送先の位置調整を行う。
【解決手段】位置検出用ウェハSは、位置調整の目標物との間の静電容量を検出する静電容量検出センサ50を有する。静電容量検出センサ50は、目標物との間で静電容量を形成する複数の静電容量検出電極52と、静電容量検出電極52と通信し、静電容量検出電極52による静電容量の検出を制御する制御回路51を有する。静電容量検出電極52は、位置検出用ウェハSの裏面側に設けられ、制御回路51は、表面側に設けられている。
【解決手段】位置検出用ウェハSは、位置調整の目標物との間の静電容量を検出する静電容量検出センサ50を有する。静電容量検出センサ50は、目標物との間で静電容量を形成する複数の静電容量検出電極52と、静電容量検出電極52と通信し、静電容量検出電極52による静電容量の検出を制御する制御回路51を有する。静電容量検出電極52は、位置検出用ウェハSの裏面側に設けられ、制御回路51は、表面側に設けられている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、基板を保持して基板を搬送する搬送アームの搬送先の位置調整を行うための位置検出用治具に関する。
【背景技術】
【0002】
例えば半導体デバイスの製造プロセスにおけるフォトリソグラフィー工程は、レジスト塗布装置、現像処理装置、熱処理装置等の複数の装置が搭載された塗布現像処理システムで行われている。この塗布現像処理システムには、各装置へのウェハの搬送を行う搬送装置が設けられている。
【0003】
上記搬送装置は、ウェハを保持する搬送アームを有し、例えば当該搬送アームが前後方向、左右方向及び上下方向に三次元移動して、ウェハを各装置に搬送している。
【0004】
ところで、各装置の所定の位置にウェハが搬送されないと、例えばウェハの受け渡しが適切に行われなかったり、またウェハの処理が適切に行われなかったりする。このため、例えば塗布現像処理システムの立ち上げ作業の際には、搬送アームがウェハを所定の位置まで搬送しているか否かを確認し、ウェハの搬送された位置がずれている場合には、搬送アームの搬送先の位置調整が行われている。
【0005】
この位置調整の方法として、例えばCCDカメラが搭載された軌跡検出用ウェハを搬送アームに保持させ、搬送アームにより軌跡検出用ウェハを搬送し、CCDカメラにより搬送アームの搬送先の停止位置を検出することが提案されている(特許文献1参照)。
【0006】
【特許文献1】特開2003−243479号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上述のCCDカメラなどの光学系機器は、焦点距離やフォーカスの調整機構等の制約により、上下方向に厚みが必要である。このため、近年薄型化が進み搬送口の隙間が狭くなっている装置に対しては、例えば上記軌跡検出用ウェハを搬入することができず、位置調整作業を適正に行うことができない。
【0008】
本発明は、かかる点に鑑みてなされたものであり、狭い搬送口を有する装置に対しても搬入可能で、搬送アームの搬送先の位置調整を適正に行うことができる位置検出用治具を提供することをその目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明は、基板を保持して搬送する搬送アームの搬送先の位置調整を行うための位置検出用治具であって、搬送アームが搬送可能な基板形状を有し、位置調整の目標物との間の静電容量を検出する静電容量検出センサを有し、前記静電容量検出センサは、目標物との間で静電容量を形成する複数の静電容量検出電極と、前記静電容量検出電極と通信し、静電容量検出電極による静電容量の検出を制御する制御回路と、を有し、前記静電容量検出電極は、基板形状の裏面側に設けられ、前記制御回路は、基板形状の表面側に設けられていることを特徴とする。
【0010】
本発明によれば、静電容量検出センサにより、目標物との間の静電容量を検出して、搬送アームの現状の搬送先の位置を認識し、それに基づいて搬送アームの位置調整を行うことができる。そして、静電容量検出センサの静電容量検出電極と制御回路は極めて薄く形成できるので、位置検出用治具を大幅に薄型化できる。このため、位置検出用治具を狭い搬送口を有する装置にも搬入可能で、搬送アームの搬送先の位置の調整を適正に行うことができる。また、静電容量検出電極が裏面側に設けられ、制御回路が表面側に設けられているので、例えば静電容量検出電極の数や配置、形状の自由度が広がり、多様な目標物に対して最適な静電容量検出電極を配置し、より高い精度で位置調整を行うことができる。
【0011】
前記基板形状には、裏面側から表面側に通じる複数の通電路が形成され、前記各静電容量検出電極は、前記通電路を通って前記制御回路に接続されていてもよい。
【0012】
前記複数の通電路は、前記基板形状の外周部に形成されていてもよい。
【0013】
前記複数の通電路は、前記基板形状の外周部に環状に配置され、前記静電容量検出電極は、前記通電路よりも前記基板形状の裏面の中央側に配置され、前記基板形状の裏面において、前記各静電容量検出電極と各導電路とを接続する配線は放射状に形成されていてもよい。
【0014】
前記各静電容量検出電極と前記制御回路を接続する各配線には、静電容量検出電極により検出された静電容量の信号を増幅する増幅回路が設けられ、前記増幅回路は、前記基板形状の表面側に設けられていてもよい。
【0015】
前記各静電容量検出電極と前記増幅回路とを接続する各配線と、前記各静電容量検出電極は、当該配線や静電容量検出電極と同電位に維持可能なガード配線によって覆われていてもよい。
【0016】
前記基板形状の表面側には、搬送アームの位置調整を行うための外部の制御部と前記制御回路との間で通信する無線回路が設けられていてもよい。
【0017】
前記静電容量検出電極は、前記基板形状の裏面側の搬送アームに支持される位置にも設けられていてもよい。
【0018】
前記静電容量検出電極は、フォトリソグラフィー工程により形成されていてもよく、またスクリーン印刷工程により形成されていてもよい。
【0019】
前記基板形状の裏面には、前記静電容量検出電極を覆うように絶縁材からなる保護膜が形成されていてもよい。
【0020】
前記搬送アームの搬送先は、基板を保持して回転させる回転保持部であって、前記基板形状の表面側の中心部には、基板形状が前記回転保持部に保持され回転された状態で、当該基板形状の中心部の加速度を測定する加速度センサが設けられていてもよい。また、前記基板形状の表面側には、前記基板形状周囲の雰囲気の湿度を測定する湿度センサが設けられていてもよく、また前記基板形状周囲の雰囲気の温度を測定する温度センサが設けられていてもよい。
【発明の効果】
【0021】
本発明によれば、狭い搬送口を有する装置に対しても位置検出用治具を搬入して、搬送アームの搬送先の位置調整を適正に行うことができる。
【発明を実施するための最良の形態】
【0022】
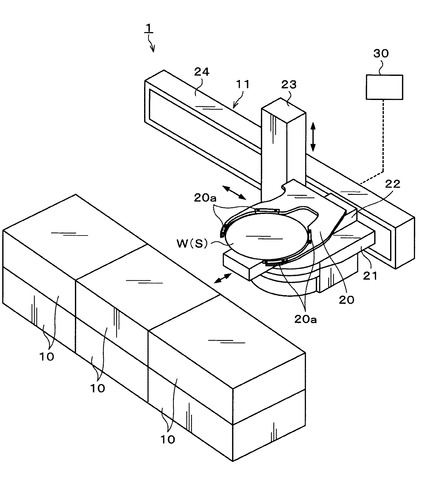
以下、本発明の好ましい実施の形態の一例について説明する。図1は、本実施の形態にかかる位置検出用治具としての位置検出用ウェハが適用される基板処理システム1の構成の概略を示す説明図である。
【0023】
例えば基板処理システム1は、ウェハWの処理を行う複数の処理装置10と、それらの処理装置10に対してウェハWの搬送を行う搬送装置11を備えている。
【0024】
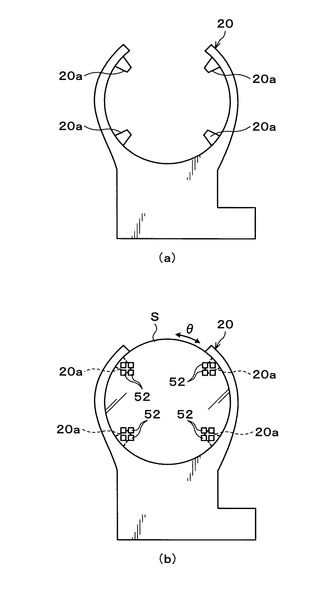
例えば搬送装置11は、搬送アーム20を有している。搬送アーム20は、例えば先端が略C字形状を有している。搬送アーム20のC字形状部分の内側には、複数の支持部20aが設けられており、これらの支持部20a上にウェハWを支持できる。搬送アーム20は、例えば基台21上に設けられたレール22を前後方向に移動できる。例えば基台21は、上下方向に延びるレール23に取り付けられ、そのレール23は、左右方向に延びるレール24に取り付けられている。これらの構成により、搬送アーム20は、前後方向、上下方向及び左右方向の3次元方向に移動できる。したがって、搬送装置11は、ウェハWを搬送アーム20に支持した状態で、当該搬送アーム20を処理装置10内に進入させて、ウェハWを処理装置10内の所定の位置まで搬送できる。
【0025】
なお、搬送アーム20によるウェハWの搬送位置は、搬送アーム20の動作を制御する外部の制御部30により制御されている。
【0026】
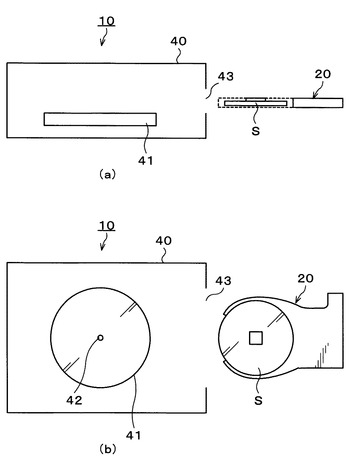
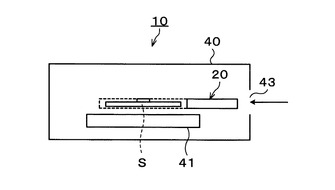
処理装置10は、例えば図2(a)に示すように処理容器40内にウェハWを載置する載置台41を有している。例えば載置台41の上面の中心部には、図2(b)に示すように位置調整の目標物としての中心穴42が形成されている。この例において、例えばウェハWの適正な搬送位置は、載置台41の中央部であり、ウェハWの中心が中心穴42に合うようにウェハWを搬送する必要がある。処理容器40の一側面には、搬送アーム20によりウェハWを搬入出するための搬送口43が形成されている。
【0027】
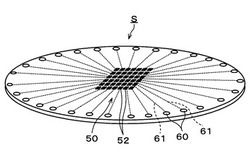
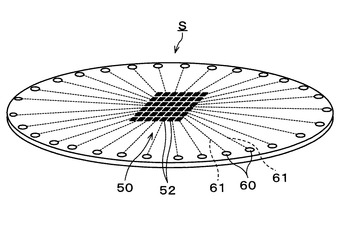
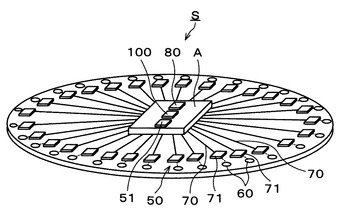
次に、位置検出用ウェハSの構成について説明する。図3は、位置検出用ウェハSの斜視図である。位置検出用ウェハSは、例えば製品ウェハWと同じ形で同じ大きさに形成され、上記搬送アーム20により搬送可能である。位置検出用ウェハSは、例えば配線パターンの形成やホール加工の容易なセラミックス、シリコン又は樹脂などにより形成されている。
【0028】
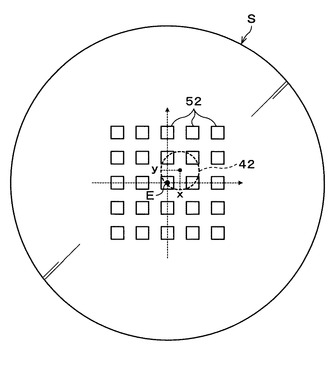
位置検出用ウェハSには、位置調整の目標物との間の静電容量を検出する静電容量検出センサ50が設けられている。静電容量検出センサ50は、表面側に制御回路51を有し、図4に示すように裏面側に複数の静電容量検出電極52を有している。
【0029】
静電容量検出電極52は、例えば図4に示すように位置検出用ウェハSの裏面の中央部に、縦横方向に格子状に並べて配置されている。静電容量検出電極52は、例えば四角形状を有し、例えば静電容量を形成する目標物(本実施の形態では中心穴42)よりも小さい径を有している。また、隣り合う静電容量検出電極52同士の間隔も、中心穴42の径よりも小さくなっている。
【0030】
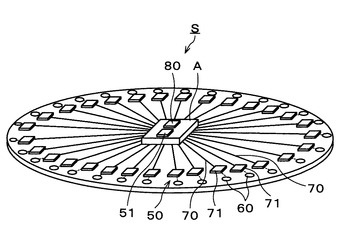
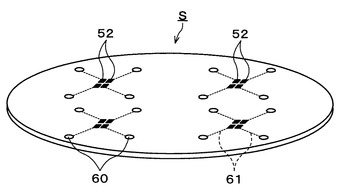
位置検出用ウェハSの外周部には、裏面側から表面側に上下方向に通じる複数の通電路60が形成されている。これらの通電路60は、位置検出用ウェハSの外周部に環状に配置されている。各静電容量検出電極52は、位置検出用ウェハSの径方向に延びる配線61によって、対応する通電路60に接続されている。これにより、位置検出用ウェハSの裏面側には、静電容量検出電極52と通電路60を接続する複数本の配線61が放射状に形成されている。
【0031】
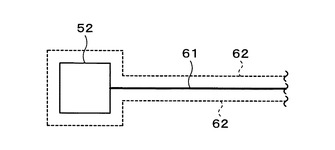
配線61と静電容量検出電極52は、図5に示すようにガード配線62によって囲まれている。配線61や静電容量検出電極52の位置検出用ウェハSの表面側も、ガード配線62により囲まれている。ガード配線62は、静電容量の検出時に例えば制御回路51により配線61や静電容量検出電極52と同電位になるように制御され、配線61や静電容量検出電極52を通る電気信号に対する外部からの電界等を遮断し、寄生容量を除去できる。
【0032】
上記位置検出用ウェハSの裏面側の構造、例えば静電容量検出電極52、配線61及びガード配線62は、成膜、露光、現像、エッチングを繰り返すフォトリソグラフィー工程により形成されている。そして、このように静電容量検出電極52、配線61及びガード配線62はフォトリソグラフィー工程により形成されるので、位置検出用ウェハSの裏面は平坦になっている。
【0033】
図3に示すように位置検出用ウェハSの表面側には、外周部の各通電路60と中心部の制御回路51とを接続する複数本の配線70が放射状に形成されている。各配線70には、静電容量検出電極52により検出された静電容量の信号を増幅する増幅回路71が設けられている。各増幅回路71は、通電路60に近接して配置されている。増幅回路71と導電路60との間の配線70には、上述したガード配線62が設けられている。
【0034】
制御回路51は、例えば位置検出用ウェハSの中央部に設けられた回路基板Aに形成されている。制御回路51は、各静電容量検出電極52に対して電圧等の信号を送受信し、静電容量検出電極52と目標物の間の静電容量を検出できる。回路基板A上には、制御回路51と外部の制御部30との間を無線で通信する無線回路80が設けられている。なお、静電容量検出電極52、制御回路51、ガード配線62及び無線回路80等の電源は、例えば位置検出用ウェハSの回路基板Aに設けられている。
【0035】
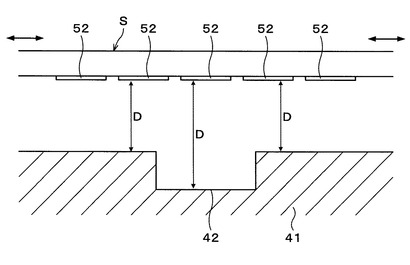
例えば制御部30は、位置検出用ウェハSから各静電容量検出電極52の静電容量の信号を受け取り、それらの静電容量に基づいて、位置検出用ウェハSに対する目標物である中心穴42の位置を特定できる。例えば制御部30は、各静電容量検出電極52により検出される静電容量の値と、位置検出用ウェハSに対する中心穴42の位置との関係を予め把握しておき、その関係から位置検出用ウェハSの中心点に対する中心穴42の座標を特定できる。図6に示すように複数の静電容量検出電極52と中心穴42との位置関係が異なると、各々の静電容量検出電極52と、中心穴42を含む載置台41上面との2極間の距離Dが変動し、静電容量が変動する(静電容量C=E0・B/D(E0は、2極間の誘電率、Bは、静電容量検出電極の面積))。これを利用して、位置検出用ウェハS面内の複数の静電容量検出電極52の静電容量を検出することにより、位置検出用ウェハS面内の中心穴42の位置が特定できる。
【0036】
また、制御部30は、特定した中心穴42の座標に基づいて、適正な位置までの補正量を算出し、搬送アーム20の搬送先の位置調整を行うことができる。
【0037】
次に、以上のように構成された位置検出用ウェハSを用いた搬送アーム20の搬送先の位置調整プロセスについて説明する。
【0038】
先ず、位置検出用ウェハSが搬送アーム20に支持される。次に、制御部30の現状の搬送先の位置設定に従って、図7に示すように搬送アーム20が、処理装置10の搬送口43から処理容器40内に進入し、搬送先である載置台41の中心部上方で停止する。その後、例えば制御部30からの指令により、位置検出用ウェハSの静電容量検出センサ50が作動し、各静電容量検出電極52と、中心穴42を含む載置台41の上面との間の静電容量が検出される。
【0039】
このとき、各静電容量検出電極52により検出された静電容量の信号は、増幅回路71において増幅され、制御回路51に送られる。制御回路51は、各静電容量検出電極52からの静電容量の信号を受信し、それらの静電容量の信号は、無線回路80により無線で制御部30に送られる。制御部30では、予め設定されている各静電容量検出電極52の静電容量の値と位置検出用ウェハSに対する中心穴42の位置との関係から、例えば図8に示すように位置検出用ウェハSの中心点Eに対する中心穴42の座標(x,y)が算出される。
【0040】
この算出された中心穴42の座標から、位置検出用ウェハSの中心点Eと中心孔42とのずれ量(x,y)が把握され、そのずれ量を調整量として、搬送アーム20の搬送先の位置調整が行われる。
【0041】
以上の実施の形態によれば、位置検出用ウェハSが静電容量検出センサ50を有し、位置検出用ウェハSの裏面側に複数の静電容量検出電極52が設けられ、表面側に制御回路51が設けられている。この位置検出用ウェハSは、従来のように光学系の機器を使用せず、薄く形成できる静電容量検出電極52と制御回路51を用いるので、位置検出用ウェハSの全体の厚みを薄くできる。この結果、狭い搬送口43を有する薄型の処理装置10にも搬入可能であり、処理装置10における搬送アーム20の搬送先の位置調整を適正に行うことができる。また、静電容量検出電極52を裏面側に設け、制御回路51を表面側に設けているので、位置合わせの目標物に合わせて静電容量検出電極52の数や形状、配置を自由に設定できる。この結果、目標物の位置の検出を高精度で行うことが可能になり、搬送アーム20の位置調整を高い精度で行うことができる。
【0042】
また、制御回路と静電容量検出電極を同じ面に設けた場合、制御回路により生じる電界が静電容量検出電極の周辺の電場に影響する。本実施の形態によれば、制御回路51と静電容量検出電極52が別の面に設けられているので、制御回路51により生じる電界が静電容量検出電極52の周辺の電場に影響を及ぼすことが抑制され、静電容量検出電極52と目標物との間の静電容量をより正確に測ることができる。これにより、位置検出用ウェハSによる目標物の位置検出をより高精度に行うことができる。さらに、本実施の形態では、増幅回路71や無線回路80も位置検出用ウェハSの表面側に設けられているので、目標物の位置検出をさらに高精度に行うことができる。
【0043】
また、本実施の形態では、比較的厚みのある制御回路51等を位置検出用ウェハSの表面側に設け、裏面側には、厚みの薄い静電容量検出電極52のみを設けたので、位置検出用ウェハSの裏面全体の平坦性が高くなる。これにより、例えば位置検出用ウェハSが搬送アーム20に水平に支持されやすくなり、この結果、複数の静電容量検出電極52を用いた目標物との間の静電容量の検出がより正確に行われ、目標物の位置検出をより安定的に高精度に行うことができる。
【0044】
また、穴加工が簡単な位置検出用ウェハSの外周部に通電路60が形成されているので、裏面の静電容量検出電極52と表面の制御回路51との配線による接続を比較的簡単に行うことができる。また、位置検出用ウェハSの外周部に通電路60を環状に配置し、静電容量検出電極52をその中心側に配置し、通電路60と静電容量検出電極52との配線61を放射状に形成したので、多数の静電容量検出電極52の配線を適正に行うことができる。また、静電容量検出電極52が多くなっても比較的簡単なパターンで配線できるので、位置検出用ウェハSの製造コストを抑えることができる。
【0045】
位置検出用ウェハSには、増幅回路71が設けられたので、静電容量の僅かな変動を示す信号も検出することができる。したがって、より高精度の位置検出が可能になる。またこの増幅回路71を位置検出用ウェハSの表面側に設けたので、これによっても裏面の静電容量検出電極52の配置の自由度が確保される。
【0046】
静電容量検出電極52と配線61の周りには、ガード配線62が設けられたので、配線61や静電容量検出電極52を通る信号に対する外部からの電界を遮断し、寄生容量を除去できる。この結果、静電容量の僅かな変動を示す信号の検出も可能になり、より高精度の位置検出が可能になる。
【0047】
位置検出用ウェハSの表面に無線回路80が設けられたので、静電容量検出センサ50による静電容量の検出結果を無線で制御部30に送信できる。また、制御部30からの位置検出用ウェハSに対する動作指令を無線で行うことができる。このため、例えば狭い場所にウェハWを搬送する搬送アーム20であっても、配線等を気にすることなく位置調整を行うことができる。
【0048】
以上の実施の形態では、位置検出用ウェハSの裏面の静電容量検出電極52をフォトリソグラフィー工程により形成するので、静電容量検出電極52を極めて薄く形成できる。このため、かつ位置検出用ウェハSの裏面の全体の平坦性がさらに向上し、これにより、例えば位置検出用ウェハSを搬送アーム20に支持させた際の水平性がより確保しやすくなる。この結果、複数の静電容量検出電極52による目標物の位置検出をより安定的に高精度に行うことができる。
【0049】
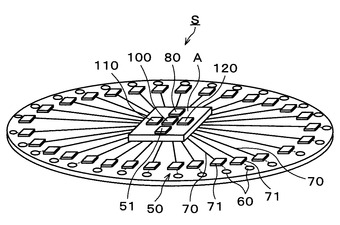
さらに、位置検出用ウェハSの裏面側の静電容量検出電極52、配線61及びガード配線62はすべてフォトリソグラフィー工程により形成されるので、位置検出用ウェハSの裏面全体の平坦性はより高くなる。これにより、例えば位置検出用ウェハSが搬送アーム20に水平に支持されやすくなり、この結果、目標物の位置検出をより安定的に高精度に行うことができる。また、このように位置検出用ウェハSの裏面が十分に平坦になると、例えば搬送アームとして、位置検出用ウェハSの裏面全体を支持するフォーク型の搬送アームを用いた場合でも、位置検出用ウェハSは水平に支持されることができる。さらに、例えば位置検出用ウェハSの裏面を真空吸着する場合でも、当該位置検出用ウェハSは有用である。例えば位置検出用ウェハSが搬送される処理装置10がレジスト塗布装置や現像装置等である場合、通常、装置内には位置検出用ウェハSの裏面を真空吸着するスピンチャックが設けられている。かかる場合でも、位置検出用ウェハSの裏面が十分に平坦なので、スピンチャックは位置検出用ウェハSを水平に真空吸着できる。また、例えば図9に示すように位置検出用ウェハSの中心部に設けられた加速度センサ100によって、スピンチャックに吸着保持され回転された状態で位置検出用ウェハSの中心部の加速度を測定し、スピンチャックの中心部に対する位置検出ウェハSの中心部の相対位置を検出することができる。また、かかる場合、静電容量検出電極52によって静電容量を検出して目標物の位置を検出した後、連続して、スピンチャックの中心部に対する位置検出用ウェハSの中心部の相対位置を検出することもできる。したがって、一の位置検出ウェハSで2種類の位置検出を行うことができるので、位置検出用ウェハSを出し入れする必要がなく、処理装置10の調整時間を大幅に短縮することができる。このように、本実施の形態の位置検出用ウェハSは、裏面の特定の領域(例えば上述したスピンチャックに真空吸着される領域)の平坦性が要求される場合に特に有利な効果を発揮できる。
【0050】
以上の実施の形態の位置検出用ウェハSの表面側に、例えば図10に示すように湿度センサ110がさらに設けられていてもよい。湿度センサ110は、回路基板A上に設けられ、位置検出用ウェハS周囲の雰囲気の湿度を測定することができる。ここで、位置検出用ウェハS周囲の雰囲気の湿度が変動すると、静電容量検出電極52によって検出される静電容量も変動する。本実施の形態においては、湿度センサ110で測定された湿度に基づいて、静電容量検出電極52で検出された静電容量を補正することができる。この補正は、位置検出用ウェハSの制御回路51で行ってもよいし、あるいは湿度センサ110で測定された湿度を無線回路80から制御部30に出力して、制御部30で行ってもよい。かかる場合、例えば位置検出用ウェハS周囲の雰囲気の湿度が変動した場合でも、静電容量検出電極52と目標物との静電容量をより正確に検出することができ、目標物の位置検出をより高精度に行うことができる。また、位置検出用ウェハSの表面側には、例えば図10に示すように温度センサ120がさらに設けられていてもよい。温度センサ120は、回路基板A上に設けられ、位置検出用ウェハS周囲の雰囲気の温度を測定することができる。そして、例えば温度センサ120が所定の温度を測定した場合に、図示しない警報器がアラームを発するようにすることもできる。そうすると、例えば所定の温度として、位置検出用ウェハSの制御回路51等のデバイスが損傷を受ける温度よりも低い温度を設定しておけば、アラームが発せられることによりデバイスの損傷を回避することができる。なお、本実施の形態では、加速度センサ100、湿度センサ110及び温度センサ120が一の位置検出ウェハSに設けられていたが、いずれか1つ以上のセンサが設けられていてもよい。
【0051】
以上の実施の形態における位置検出用ウェハSの裏面側の静電容量検出電極52は、搬送アーム20に支持される位置にも設けられていてもよい。例えば図11(a)に示すように搬送アーム20の支持部20aが、位置検出用ウェハSの外周部の4箇所を支持するように設けられている場合には、図11(b)に示すようにそれらの支持部20aに対応する位置に、それぞれ複数の静電容量検出電極52が設けられる。なお、各静電容量検出電極50は、上述したように位置検出用ウェハSの表面側の制御回路51に接続されている。
【0052】
かかる場合、例えば位置調整の際に位置検出用ウェハSが搬送アーム20に支持されたときに、各静電容量検出電極52が、支持部20aとの間の静電容量を検出する。この静電容量の結果に基づいて、位置検出用ウェハSが搬送アーム20の適正な位置に適正な向きに支持されているか否かが判定される。例えば静電容量の検出値と予め求められているその適正値が比較され、位置検出用ウェハSが4箇所の支持部20aに適正に支持され、なおかつ位置検出用ウェハSのθ方向の向きが適正か否かが判定される。これにより、位置調整作業の際に、位置検出用ウェハSが搬送アーム20の適正な位置に適正な向きに支持されているか否かを確認でき、位置検出用ウェハSと搬送アーム20との位置関係を確認できる。この結果、搬送アーム20に対する位置検出用ウェハSの位置を合わせてから、位置調整作業を行うことができるので、上述した位置検出用ウェハSによる搬送アーム20の搬送先の位置の検出をより正確に行うことができる。
【0053】
以上の実施の形態では、通電路60は位置検出用ウェハSの外周部に環状に配置されていたが、例えば図12に示すように、通電路60は位置検出用ウェハSの任意の位置に配置されてもよい。例えば静電容量検出電極52は前記実施の形態で示したように位置検出用ウェハSの裏面の中央部に縦横方向に格子状に並べて配置されず、目標物の位置に応じて任意の位置に配置される場合がある。また、位置検査用ウェハSの表面側の制御回路51、増幅回路71、無線回路80、回路基板A等のデバイスも、前記実施の形態で示したように位置検査ウェハSの表面の中央部に配置されるとは限らない。本実施の形態では、これら静電容量検出電極52や制御回路51等の配置を鑑みて、通電路60を任意の位置に配置することができる。特に、通電路60間の間隔を、隣接して配置された静電容量検出電極52間の間隔よりも大きくできるため、通電路60の配置の自由度が増加する。
【0054】
以上の実施の形態の位置検出用ウェハSの裏面には、絶縁材からなる保護膜が形成されていてもよい。保護膜は、静電容量検出電極52、配線61及びガード配線62を覆うように形成される。これにより、静電容量検出電極52が金属汚染されるのを防止できる。また、例えば多数回の使用による静電容量検出電極52の損傷等も防止できる。
【0055】
以上の実施の形態では、位置検出用ウェハSの裏面側の構造、例えば静電容量検出電極52、配線61及びガード配線62は、フォトリソグラフィー工程により形成されていたが、スクリーン印刷工程により形成されてもよい。ここで、スクリーン印刷工程とは、スクリーン製版に描写されたパターンの孔にインクを充填し、スクリーン製版に描写されたパターンを被写体に転写することにより、被写体に所定のパターンを形成する工程である。本実施の形態においては、静電容量検出電極52、配線61及びガード配線62に対応する所定のパターンが形成されたスクリーン製版を用いて、例えば銀インクやエポキシインクを位置検出用ウェハSの裏面に転写する。そうすると、位置検出用ウェハSの裏面に静電容量検出電極52、配線61及びガード配線62が所定の位置に形成される。かかる場合でも、スクリーン印刷工程により位置検出用ウェハSの裏面を平坦にすることができる。これにより、例えば位置検出用ウェハSが搬送アーム20に水平に支持されやすくなり、この結果、目標物の位置検出をより安定的に高精度に行うことができる。このようにスクリーン印刷工程を行った場合、上述したフォトリソグラフィー工程を行った場合の効果と同じ効果を享受できる。
【0056】
以上、添付図面を参照しながら本発明の好適な実施の形態について説明したが、本発明はかかる例に限定されない。当業者であれば、特許請求の範囲に記載された思想の範疇内において、各種の変更例または修正例に相到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【0057】
例えば、以上の実施の形態で記載した位置検出用ウェハSの裏面の静電容量検出電極52の数や形状、配置は、位置合わせの目標物に応じて適宜選択できる。また、位置検出用ウェハSの表面の増幅回路71や制御回路51の位置や数も、上記例に限られない。また、位置検出用ウェハSの通電路60の位置や数も上記例に限られない。さらに、目標物は、中心穴42に限られず、凹凸のあるものであれば、他のものであってもよい。以上の実施の形態における位置検出ウェハSによる位置検出は、水平面内の位置であったが、上下方向の位置も検出できる。また、位置検出用ウェハSの表面側には、位置調整のための他の機能を果たす回路が設けられていてもよい。また、以上の実施の形態において、位置検出用治具はウェハ型であったが、方形等の他の形状の基板型であってもよい。
【産業上の利用可能性】
【0058】
本発明は、狭い搬送口を有する装置に対しても搬送アームの搬送先の位置調整を適正に行う際に有用である。
【図面の簡単な説明】
【0059】
【図1】基板処理システムの概略を示す説明図である。
【図2】(a)は、処理装置の構成の概略を示す側面図であり、(b)は、処理装置の構成の概略を示す平面図である。
【図3】位置検出用ウェハの斜視図である。
【図4】位置検出用ウェハの裏面を示す斜視図である。
【図5】静電容量検出電極と配線がガード配線により覆われた様子を示す説明図である。
【図6】位置検出用ウェハの静電容量検出電極と載置台の表面の間の距離を示す説明図である。
【図7】処理装置内に搬送アームが進入した様子を示す説明図である。
【図8】位置検出用ウェハの中心点に対する中心穴の位置を示す説明図である。
【図9】表面側に加速度センサが設けられた位置検出用ウェハの斜視図である。
【図10】表面側に加速度センサ、湿度センサ及び温度センサが設けられた位置検出用ウェハの斜視図である。
【図11】(a)は、搬送アームの支持部の位置を示す説明図である。(b)は、位置検出用ウェハの静電容量検出電極の位置を示す説明図である。
【図12】通電路が任意の位置に配置された位置検出用ウェハの裏面を示す斜視図である。
【符号の説明】
【0060】
10 処理装置
11 搬送装置
20 搬送アーム
50 静電容量検出センサ
51 制御回路
52 静電容量検出電極
71 増幅回路
80 無線回路
S 位置検出用ウェハ
W ウェハ
【技術分野】
【0001】
本発明は、基板を保持して基板を搬送する搬送アームの搬送先の位置調整を行うための位置検出用治具に関する。
【背景技術】
【0002】
例えば半導体デバイスの製造プロセスにおけるフォトリソグラフィー工程は、レジスト塗布装置、現像処理装置、熱処理装置等の複数の装置が搭載された塗布現像処理システムで行われている。この塗布現像処理システムには、各装置へのウェハの搬送を行う搬送装置が設けられている。
【0003】
上記搬送装置は、ウェハを保持する搬送アームを有し、例えば当該搬送アームが前後方向、左右方向及び上下方向に三次元移動して、ウェハを各装置に搬送している。
【0004】
ところで、各装置の所定の位置にウェハが搬送されないと、例えばウェハの受け渡しが適切に行われなかったり、またウェハの処理が適切に行われなかったりする。このため、例えば塗布現像処理システムの立ち上げ作業の際には、搬送アームがウェハを所定の位置まで搬送しているか否かを確認し、ウェハの搬送された位置がずれている場合には、搬送アームの搬送先の位置調整が行われている。
【0005】
この位置調整の方法として、例えばCCDカメラが搭載された軌跡検出用ウェハを搬送アームに保持させ、搬送アームにより軌跡検出用ウェハを搬送し、CCDカメラにより搬送アームの搬送先の停止位置を検出することが提案されている(特許文献1参照)。
【0006】
【特許文献1】特開2003−243479号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、上述のCCDカメラなどの光学系機器は、焦点距離やフォーカスの調整機構等の制約により、上下方向に厚みが必要である。このため、近年薄型化が進み搬送口の隙間が狭くなっている装置に対しては、例えば上記軌跡検出用ウェハを搬入することができず、位置調整作業を適正に行うことができない。
【0008】
本発明は、かかる点に鑑みてなされたものであり、狭い搬送口を有する装置に対しても搬入可能で、搬送アームの搬送先の位置調整を適正に行うことができる位置検出用治具を提供することをその目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明は、基板を保持して搬送する搬送アームの搬送先の位置調整を行うための位置検出用治具であって、搬送アームが搬送可能な基板形状を有し、位置調整の目標物との間の静電容量を検出する静電容量検出センサを有し、前記静電容量検出センサは、目標物との間で静電容量を形成する複数の静電容量検出電極と、前記静電容量検出電極と通信し、静電容量検出電極による静電容量の検出を制御する制御回路と、を有し、前記静電容量検出電極は、基板形状の裏面側に設けられ、前記制御回路は、基板形状の表面側に設けられていることを特徴とする。
【0010】
本発明によれば、静電容量検出センサにより、目標物との間の静電容量を検出して、搬送アームの現状の搬送先の位置を認識し、それに基づいて搬送アームの位置調整を行うことができる。そして、静電容量検出センサの静電容量検出電極と制御回路は極めて薄く形成できるので、位置検出用治具を大幅に薄型化できる。このため、位置検出用治具を狭い搬送口を有する装置にも搬入可能で、搬送アームの搬送先の位置の調整を適正に行うことができる。また、静電容量検出電極が裏面側に設けられ、制御回路が表面側に設けられているので、例えば静電容量検出電極の数や配置、形状の自由度が広がり、多様な目標物に対して最適な静電容量検出電極を配置し、より高い精度で位置調整を行うことができる。
【0011】
前記基板形状には、裏面側から表面側に通じる複数の通電路が形成され、前記各静電容量検出電極は、前記通電路を通って前記制御回路に接続されていてもよい。
【0012】
前記複数の通電路は、前記基板形状の外周部に形成されていてもよい。
【0013】
前記複数の通電路は、前記基板形状の外周部に環状に配置され、前記静電容量検出電極は、前記通電路よりも前記基板形状の裏面の中央側に配置され、前記基板形状の裏面において、前記各静電容量検出電極と各導電路とを接続する配線は放射状に形成されていてもよい。
【0014】
前記各静電容量検出電極と前記制御回路を接続する各配線には、静電容量検出電極により検出された静電容量の信号を増幅する増幅回路が設けられ、前記増幅回路は、前記基板形状の表面側に設けられていてもよい。
【0015】
前記各静電容量検出電極と前記増幅回路とを接続する各配線と、前記各静電容量検出電極は、当該配線や静電容量検出電極と同電位に維持可能なガード配線によって覆われていてもよい。
【0016】
前記基板形状の表面側には、搬送アームの位置調整を行うための外部の制御部と前記制御回路との間で通信する無線回路が設けられていてもよい。
【0017】
前記静電容量検出電極は、前記基板形状の裏面側の搬送アームに支持される位置にも設けられていてもよい。
【0018】
前記静電容量検出電極は、フォトリソグラフィー工程により形成されていてもよく、またスクリーン印刷工程により形成されていてもよい。
【0019】
前記基板形状の裏面には、前記静電容量検出電極を覆うように絶縁材からなる保護膜が形成されていてもよい。
【0020】
前記搬送アームの搬送先は、基板を保持して回転させる回転保持部であって、前記基板形状の表面側の中心部には、基板形状が前記回転保持部に保持され回転された状態で、当該基板形状の中心部の加速度を測定する加速度センサが設けられていてもよい。また、前記基板形状の表面側には、前記基板形状周囲の雰囲気の湿度を測定する湿度センサが設けられていてもよく、また前記基板形状周囲の雰囲気の温度を測定する温度センサが設けられていてもよい。
【発明の効果】
【0021】
本発明によれば、狭い搬送口を有する装置に対しても位置検出用治具を搬入して、搬送アームの搬送先の位置調整を適正に行うことができる。
【発明を実施するための最良の形態】
【0022】
以下、本発明の好ましい実施の形態の一例について説明する。図1は、本実施の形態にかかる位置検出用治具としての位置検出用ウェハが適用される基板処理システム1の構成の概略を示す説明図である。
【0023】
例えば基板処理システム1は、ウェハWの処理を行う複数の処理装置10と、それらの処理装置10に対してウェハWの搬送を行う搬送装置11を備えている。
【0024】
例えば搬送装置11は、搬送アーム20を有している。搬送アーム20は、例えば先端が略C字形状を有している。搬送アーム20のC字形状部分の内側には、複数の支持部20aが設けられており、これらの支持部20a上にウェハWを支持できる。搬送アーム20は、例えば基台21上に設けられたレール22を前後方向に移動できる。例えば基台21は、上下方向に延びるレール23に取り付けられ、そのレール23は、左右方向に延びるレール24に取り付けられている。これらの構成により、搬送アーム20は、前後方向、上下方向及び左右方向の3次元方向に移動できる。したがって、搬送装置11は、ウェハWを搬送アーム20に支持した状態で、当該搬送アーム20を処理装置10内に進入させて、ウェハWを処理装置10内の所定の位置まで搬送できる。
【0025】
なお、搬送アーム20によるウェハWの搬送位置は、搬送アーム20の動作を制御する外部の制御部30により制御されている。
【0026】
処理装置10は、例えば図2(a)に示すように処理容器40内にウェハWを載置する載置台41を有している。例えば載置台41の上面の中心部には、図2(b)に示すように位置調整の目標物としての中心穴42が形成されている。この例において、例えばウェハWの適正な搬送位置は、載置台41の中央部であり、ウェハWの中心が中心穴42に合うようにウェハWを搬送する必要がある。処理容器40の一側面には、搬送アーム20によりウェハWを搬入出するための搬送口43が形成されている。
【0027】
次に、位置検出用ウェハSの構成について説明する。図3は、位置検出用ウェハSの斜視図である。位置検出用ウェハSは、例えば製品ウェハWと同じ形で同じ大きさに形成され、上記搬送アーム20により搬送可能である。位置検出用ウェハSは、例えば配線パターンの形成やホール加工の容易なセラミックス、シリコン又は樹脂などにより形成されている。
【0028】
位置検出用ウェハSには、位置調整の目標物との間の静電容量を検出する静電容量検出センサ50が設けられている。静電容量検出センサ50は、表面側に制御回路51を有し、図4に示すように裏面側に複数の静電容量検出電極52を有している。
【0029】
静電容量検出電極52は、例えば図4に示すように位置検出用ウェハSの裏面の中央部に、縦横方向に格子状に並べて配置されている。静電容量検出電極52は、例えば四角形状を有し、例えば静電容量を形成する目標物(本実施の形態では中心穴42)よりも小さい径を有している。また、隣り合う静電容量検出電極52同士の間隔も、中心穴42の径よりも小さくなっている。
【0030】
位置検出用ウェハSの外周部には、裏面側から表面側に上下方向に通じる複数の通電路60が形成されている。これらの通電路60は、位置検出用ウェハSの外周部に環状に配置されている。各静電容量検出電極52は、位置検出用ウェハSの径方向に延びる配線61によって、対応する通電路60に接続されている。これにより、位置検出用ウェハSの裏面側には、静電容量検出電極52と通電路60を接続する複数本の配線61が放射状に形成されている。
【0031】
配線61と静電容量検出電極52は、図5に示すようにガード配線62によって囲まれている。配線61や静電容量検出電極52の位置検出用ウェハSの表面側も、ガード配線62により囲まれている。ガード配線62は、静電容量の検出時に例えば制御回路51により配線61や静電容量検出電極52と同電位になるように制御され、配線61や静電容量検出電極52を通る電気信号に対する外部からの電界等を遮断し、寄生容量を除去できる。
【0032】
上記位置検出用ウェハSの裏面側の構造、例えば静電容量検出電極52、配線61及びガード配線62は、成膜、露光、現像、エッチングを繰り返すフォトリソグラフィー工程により形成されている。そして、このように静電容量検出電極52、配線61及びガード配線62はフォトリソグラフィー工程により形成されるので、位置検出用ウェハSの裏面は平坦になっている。
【0033】
図3に示すように位置検出用ウェハSの表面側には、外周部の各通電路60と中心部の制御回路51とを接続する複数本の配線70が放射状に形成されている。各配線70には、静電容量検出電極52により検出された静電容量の信号を増幅する増幅回路71が設けられている。各増幅回路71は、通電路60に近接して配置されている。増幅回路71と導電路60との間の配線70には、上述したガード配線62が設けられている。
【0034】
制御回路51は、例えば位置検出用ウェハSの中央部に設けられた回路基板Aに形成されている。制御回路51は、各静電容量検出電極52に対して電圧等の信号を送受信し、静電容量検出電極52と目標物の間の静電容量を検出できる。回路基板A上には、制御回路51と外部の制御部30との間を無線で通信する無線回路80が設けられている。なお、静電容量検出電極52、制御回路51、ガード配線62及び無線回路80等の電源は、例えば位置検出用ウェハSの回路基板Aに設けられている。
【0035】
例えば制御部30は、位置検出用ウェハSから各静電容量検出電極52の静電容量の信号を受け取り、それらの静電容量に基づいて、位置検出用ウェハSに対する目標物である中心穴42の位置を特定できる。例えば制御部30は、各静電容量検出電極52により検出される静電容量の値と、位置検出用ウェハSに対する中心穴42の位置との関係を予め把握しておき、その関係から位置検出用ウェハSの中心点に対する中心穴42の座標を特定できる。図6に示すように複数の静電容量検出電極52と中心穴42との位置関係が異なると、各々の静電容量検出電極52と、中心穴42を含む載置台41上面との2極間の距離Dが変動し、静電容量が変動する(静電容量C=E0・B/D(E0は、2極間の誘電率、Bは、静電容量検出電極の面積))。これを利用して、位置検出用ウェハS面内の複数の静電容量検出電極52の静電容量を検出することにより、位置検出用ウェハS面内の中心穴42の位置が特定できる。
【0036】
また、制御部30は、特定した中心穴42の座標に基づいて、適正な位置までの補正量を算出し、搬送アーム20の搬送先の位置調整を行うことができる。
【0037】
次に、以上のように構成された位置検出用ウェハSを用いた搬送アーム20の搬送先の位置調整プロセスについて説明する。
【0038】
先ず、位置検出用ウェハSが搬送アーム20に支持される。次に、制御部30の現状の搬送先の位置設定に従って、図7に示すように搬送アーム20が、処理装置10の搬送口43から処理容器40内に進入し、搬送先である載置台41の中心部上方で停止する。その後、例えば制御部30からの指令により、位置検出用ウェハSの静電容量検出センサ50が作動し、各静電容量検出電極52と、中心穴42を含む載置台41の上面との間の静電容量が検出される。
【0039】
このとき、各静電容量検出電極52により検出された静電容量の信号は、増幅回路71において増幅され、制御回路51に送られる。制御回路51は、各静電容量検出電極52からの静電容量の信号を受信し、それらの静電容量の信号は、無線回路80により無線で制御部30に送られる。制御部30では、予め設定されている各静電容量検出電極52の静電容量の値と位置検出用ウェハSに対する中心穴42の位置との関係から、例えば図8に示すように位置検出用ウェハSの中心点Eに対する中心穴42の座標(x,y)が算出される。
【0040】
この算出された中心穴42の座標から、位置検出用ウェハSの中心点Eと中心孔42とのずれ量(x,y)が把握され、そのずれ量を調整量として、搬送アーム20の搬送先の位置調整が行われる。
【0041】
以上の実施の形態によれば、位置検出用ウェハSが静電容量検出センサ50を有し、位置検出用ウェハSの裏面側に複数の静電容量検出電極52が設けられ、表面側に制御回路51が設けられている。この位置検出用ウェハSは、従来のように光学系の機器を使用せず、薄く形成できる静電容量検出電極52と制御回路51を用いるので、位置検出用ウェハSの全体の厚みを薄くできる。この結果、狭い搬送口43を有する薄型の処理装置10にも搬入可能であり、処理装置10における搬送アーム20の搬送先の位置調整を適正に行うことができる。また、静電容量検出電極52を裏面側に設け、制御回路51を表面側に設けているので、位置合わせの目標物に合わせて静電容量検出電極52の数や形状、配置を自由に設定できる。この結果、目標物の位置の検出を高精度で行うことが可能になり、搬送アーム20の位置調整を高い精度で行うことができる。
【0042】
また、制御回路と静電容量検出電極を同じ面に設けた場合、制御回路により生じる電界が静電容量検出電極の周辺の電場に影響する。本実施の形態によれば、制御回路51と静電容量検出電極52が別の面に設けられているので、制御回路51により生じる電界が静電容量検出電極52の周辺の電場に影響を及ぼすことが抑制され、静電容量検出電極52と目標物との間の静電容量をより正確に測ることができる。これにより、位置検出用ウェハSによる目標物の位置検出をより高精度に行うことができる。さらに、本実施の形態では、増幅回路71や無線回路80も位置検出用ウェハSの表面側に設けられているので、目標物の位置検出をさらに高精度に行うことができる。
【0043】
また、本実施の形態では、比較的厚みのある制御回路51等を位置検出用ウェハSの表面側に設け、裏面側には、厚みの薄い静電容量検出電極52のみを設けたので、位置検出用ウェハSの裏面全体の平坦性が高くなる。これにより、例えば位置検出用ウェハSが搬送アーム20に水平に支持されやすくなり、この結果、複数の静電容量検出電極52を用いた目標物との間の静電容量の検出がより正確に行われ、目標物の位置検出をより安定的に高精度に行うことができる。
【0044】
また、穴加工が簡単な位置検出用ウェハSの外周部に通電路60が形成されているので、裏面の静電容量検出電極52と表面の制御回路51との配線による接続を比較的簡単に行うことができる。また、位置検出用ウェハSの外周部に通電路60を環状に配置し、静電容量検出電極52をその中心側に配置し、通電路60と静電容量検出電極52との配線61を放射状に形成したので、多数の静電容量検出電極52の配線を適正に行うことができる。また、静電容量検出電極52が多くなっても比較的簡単なパターンで配線できるので、位置検出用ウェハSの製造コストを抑えることができる。
【0045】
位置検出用ウェハSには、増幅回路71が設けられたので、静電容量の僅かな変動を示す信号も検出することができる。したがって、より高精度の位置検出が可能になる。またこの増幅回路71を位置検出用ウェハSの表面側に設けたので、これによっても裏面の静電容量検出電極52の配置の自由度が確保される。
【0046】
静電容量検出電極52と配線61の周りには、ガード配線62が設けられたので、配線61や静電容量検出電極52を通る信号に対する外部からの電界を遮断し、寄生容量を除去できる。この結果、静電容量の僅かな変動を示す信号の検出も可能になり、より高精度の位置検出が可能になる。
【0047】
位置検出用ウェハSの表面に無線回路80が設けられたので、静電容量検出センサ50による静電容量の検出結果を無線で制御部30に送信できる。また、制御部30からの位置検出用ウェハSに対する動作指令を無線で行うことができる。このため、例えば狭い場所にウェハWを搬送する搬送アーム20であっても、配線等を気にすることなく位置調整を行うことができる。
【0048】
以上の実施の形態では、位置検出用ウェハSの裏面の静電容量検出電極52をフォトリソグラフィー工程により形成するので、静電容量検出電極52を極めて薄く形成できる。このため、かつ位置検出用ウェハSの裏面の全体の平坦性がさらに向上し、これにより、例えば位置検出用ウェハSを搬送アーム20に支持させた際の水平性がより確保しやすくなる。この結果、複数の静電容量検出電極52による目標物の位置検出をより安定的に高精度に行うことができる。
【0049】
さらに、位置検出用ウェハSの裏面側の静電容量検出電極52、配線61及びガード配線62はすべてフォトリソグラフィー工程により形成されるので、位置検出用ウェハSの裏面全体の平坦性はより高くなる。これにより、例えば位置検出用ウェハSが搬送アーム20に水平に支持されやすくなり、この結果、目標物の位置検出をより安定的に高精度に行うことができる。また、このように位置検出用ウェハSの裏面が十分に平坦になると、例えば搬送アームとして、位置検出用ウェハSの裏面全体を支持するフォーク型の搬送アームを用いた場合でも、位置検出用ウェハSは水平に支持されることができる。さらに、例えば位置検出用ウェハSの裏面を真空吸着する場合でも、当該位置検出用ウェハSは有用である。例えば位置検出用ウェハSが搬送される処理装置10がレジスト塗布装置や現像装置等である場合、通常、装置内には位置検出用ウェハSの裏面を真空吸着するスピンチャックが設けられている。かかる場合でも、位置検出用ウェハSの裏面が十分に平坦なので、スピンチャックは位置検出用ウェハSを水平に真空吸着できる。また、例えば図9に示すように位置検出用ウェハSの中心部に設けられた加速度センサ100によって、スピンチャックに吸着保持され回転された状態で位置検出用ウェハSの中心部の加速度を測定し、スピンチャックの中心部に対する位置検出ウェハSの中心部の相対位置を検出することができる。また、かかる場合、静電容量検出電極52によって静電容量を検出して目標物の位置を検出した後、連続して、スピンチャックの中心部に対する位置検出用ウェハSの中心部の相対位置を検出することもできる。したがって、一の位置検出ウェハSで2種類の位置検出を行うことができるので、位置検出用ウェハSを出し入れする必要がなく、処理装置10の調整時間を大幅に短縮することができる。このように、本実施の形態の位置検出用ウェハSは、裏面の特定の領域(例えば上述したスピンチャックに真空吸着される領域)の平坦性が要求される場合に特に有利な効果を発揮できる。
【0050】
以上の実施の形態の位置検出用ウェハSの表面側に、例えば図10に示すように湿度センサ110がさらに設けられていてもよい。湿度センサ110は、回路基板A上に設けられ、位置検出用ウェハS周囲の雰囲気の湿度を測定することができる。ここで、位置検出用ウェハS周囲の雰囲気の湿度が変動すると、静電容量検出電極52によって検出される静電容量も変動する。本実施の形態においては、湿度センサ110で測定された湿度に基づいて、静電容量検出電極52で検出された静電容量を補正することができる。この補正は、位置検出用ウェハSの制御回路51で行ってもよいし、あるいは湿度センサ110で測定された湿度を無線回路80から制御部30に出力して、制御部30で行ってもよい。かかる場合、例えば位置検出用ウェハS周囲の雰囲気の湿度が変動した場合でも、静電容量検出電極52と目標物との静電容量をより正確に検出することができ、目標物の位置検出をより高精度に行うことができる。また、位置検出用ウェハSの表面側には、例えば図10に示すように温度センサ120がさらに設けられていてもよい。温度センサ120は、回路基板A上に設けられ、位置検出用ウェハS周囲の雰囲気の温度を測定することができる。そして、例えば温度センサ120が所定の温度を測定した場合に、図示しない警報器がアラームを発するようにすることもできる。そうすると、例えば所定の温度として、位置検出用ウェハSの制御回路51等のデバイスが損傷を受ける温度よりも低い温度を設定しておけば、アラームが発せられることによりデバイスの損傷を回避することができる。なお、本実施の形態では、加速度センサ100、湿度センサ110及び温度センサ120が一の位置検出ウェハSに設けられていたが、いずれか1つ以上のセンサが設けられていてもよい。
【0051】
以上の実施の形態における位置検出用ウェハSの裏面側の静電容量検出電極52は、搬送アーム20に支持される位置にも設けられていてもよい。例えば図11(a)に示すように搬送アーム20の支持部20aが、位置検出用ウェハSの外周部の4箇所を支持するように設けられている場合には、図11(b)に示すようにそれらの支持部20aに対応する位置に、それぞれ複数の静電容量検出電極52が設けられる。なお、各静電容量検出電極50は、上述したように位置検出用ウェハSの表面側の制御回路51に接続されている。
【0052】
かかる場合、例えば位置調整の際に位置検出用ウェハSが搬送アーム20に支持されたときに、各静電容量検出電極52が、支持部20aとの間の静電容量を検出する。この静電容量の結果に基づいて、位置検出用ウェハSが搬送アーム20の適正な位置に適正な向きに支持されているか否かが判定される。例えば静電容量の検出値と予め求められているその適正値が比較され、位置検出用ウェハSが4箇所の支持部20aに適正に支持され、なおかつ位置検出用ウェハSのθ方向の向きが適正か否かが判定される。これにより、位置調整作業の際に、位置検出用ウェハSが搬送アーム20の適正な位置に適正な向きに支持されているか否かを確認でき、位置検出用ウェハSと搬送アーム20との位置関係を確認できる。この結果、搬送アーム20に対する位置検出用ウェハSの位置を合わせてから、位置調整作業を行うことができるので、上述した位置検出用ウェハSによる搬送アーム20の搬送先の位置の検出をより正確に行うことができる。
【0053】
以上の実施の形態では、通電路60は位置検出用ウェハSの外周部に環状に配置されていたが、例えば図12に示すように、通電路60は位置検出用ウェハSの任意の位置に配置されてもよい。例えば静電容量検出電極52は前記実施の形態で示したように位置検出用ウェハSの裏面の中央部に縦横方向に格子状に並べて配置されず、目標物の位置に応じて任意の位置に配置される場合がある。また、位置検査用ウェハSの表面側の制御回路51、増幅回路71、無線回路80、回路基板A等のデバイスも、前記実施の形態で示したように位置検査ウェハSの表面の中央部に配置されるとは限らない。本実施の形態では、これら静電容量検出電極52や制御回路51等の配置を鑑みて、通電路60を任意の位置に配置することができる。特に、通電路60間の間隔を、隣接して配置された静電容量検出電極52間の間隔よりも大きくできるため、通電路60の配置の自由度が増加する。
【0054】
以上の実施の形態の位置検出用ウェハSの裏面には、絶縁材からなる保護膜が形成されていてもよい。保護膜は、静電容量検出電極52、配線61及びガード配線62を覆うように形成される。これにより、静電容量検出電極52が金属汚染されるのを防止できる。また、例えば多数回の使用による静電容量検出電極52の損傷等も防止できる。
【0055】
以上の実施の形態では、位置検出用ウェハSの裏面側の構造、例えば静電容量検出電極52、配線61及びガード配線62は、フォトリソグラフィー工程により形成されていたが、スクリーン印刷工程により形成されてもよい。ここで、スクリーン印刷工程とは、スクリーン製版に描写されたパターンの孔にインクを充填し、スクリーン製版に描写されたパターンを被写体に転写することにより、被写体に所定のパターンを形成する工程である。本実施の形態においては、静電容量検出電極52、配線61及びガード配線62に対応する所定のパターンが形成されたスクリーン製版を用いて、例えば銀インクやエポキシインクを位置検出用ウェハSの裏面に転写する。そうすると、位置検出用ウェハSの裏面に静電容量検出電極52、配線61及びガード配線62が所定の位置に形成される。かかる場合でも、スクリーン印刷工程により位置検出用ウェハSの裏面を平坦にすることができる。これにより、例えば位置検出用ウェハSが搬送アーム20に水平に支持されやすくなり、この結果、目標物の位置検出をより安定的に高精度に行うことができる。このようにスクリーン印刷工程を行った場合、上述したフォトリソグラフィー工程を行った場合の効果と同じ効果を享受できる。
【0056】
以上、添付図面を参照しながら本発明の好適な実施の形態について説明したが、本発明はかかる例に限定されない。当業者であれば、特許請求の範囲に記載された思想の範疇内において、各種の変更例または修正例に相到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【0057】
例えば、以上の実施の形態で記載した位置検出用ウェハSの裏面の静電容量検出電極52の数や形状、配置は、位置合わせの目標物に応じて適宜選択できる。また、位置検出用ウェハSの表面の増幅回路71や制御回路51の位置や数も、上記例に限られない。また、位置検出用ウェハSの通電路60の位置や数も上記例に限られない。さらに、目標物は、中心穴42に限られず、凹凸のあるものであれば、他のものであってもよい。以上の実施の形態における位置検出ウェハSによる位置検出は、水平面内の位置であったが、上下方向の位置も検出できる。また、位置検出用ウェハSの表面側には、位置調整のための他の機能を果たす回路が設けられていてもよい。また、以上の実施の形態において、位置検出用治具はウェハ型であったが、方形等の他の形状の基板型であってもよい。
【産業上の利用可能性】
【0058】
本発明は、狭い搬送口を有する装置に対しても搬送アームの搬送先の位置調整を適正に行う際に有用である。
【図面の簡単な説明】
【0059】
【図1】基板処理システムの概略を示す説明図である。
【図2】(a)は、処理装置の構成の概略を示す側面図であり、(b)は、処理装置の構成の概略を示す平面図である。
【図3】位置検出用ウェハの斜視図である。
【図4】位置検出用ウェハの裏面を示す斜視図である。
【図5】静電容量検出電極と配線がガード配線により覆われた様子を示す説明図である。
【図6】位置検出用ウェハの静電容量検出電極と載置台の表面の間の距離を示す説明図である。
【図7】処理装置内に搬送アームが進入した様子を示す説明図である。
【図8】位置検出用ウェハの中心点に対する中心穴の位置を示す説明図である。
【図9】表面側に加速度センサが設けられた位置検出用ウェハの斜視図である。
【図10】表面側に加速度センサ、湿度センサ及び温度センサが設けられた位置検出用ウェハの斜視図である。
【図11】(a)は、搬送アームの支持部の位置を示す説明図である。(b)は、位置検出用ウェハの静電容量検出電極の位置を示す説明図である。
【図12】通電路が任意の位置に配置された位置検出用ウェハの裏面を示す斜視図である。
【符号の説明】
【0060】
10 処理装置
11 搬送装置
20 搬送アーム
50 静電容量検出センサ
51 制御回路
52 静電容量検出電極
71 増幅回路
80 無線回路
S 位置検出用ウェハ
W ウェハ
【特許請求の範囲】
【請求項1】
基板を保持して搬送する搬送アームの搬送先の位置調整を行うための位置検出用治具であって、
搬送アームが搬送可能な基板形状を有し、
位置調整の目標物との間の静電容量を検出する静電容量検出センサを有し、
前記静電容量検出センサは、目標物との間で静電容量を形成する複数の静電容量検出電極と、前記静電容量検出電極と通信し、静電容量検出電極による静電容量の検出を制御する制御回路と、を有し、
前記静電容量検出電極は、基板形状の裏面側に設けられ、
前記制御回路は、基板形状の表面側に設けられていることを特徴とする、位置検出用治具。
【請求項2】
前記基板形状には、裏面側から表面側に通じる複数の通電路が形成され、
前記各静電容量検出電極は、前記通電路を通って前記制御回路に接続されていることを特徴とする、請求項1に記載の位置検出用治具。
【請求項3】
前記複数の通電路は、前記基板形状の外周部に形成されていることを特徴とする、請求項2に記載の位置検出用治具。
【請求項4】
前記複数の通電路は、前記基板形状の外周部に環状に配置され、
前記静電容量検出電極は、前記通電路よりも前記基板形状の裏面の中央側に配置され、
前記基板形状の裏面において、前記各静電容量検出電極と各導電路とを接続する配線は放射状に形成されていることを特徴とする、請求項3に記載の位置検出用治具。
【請求項5】
前記各静電容量検出電極と前記制御回路を接続する各配線には、静電容量検出電極により検出された静電容量の信号を増幅する増幅回路が設けられ、
前記増幅回路は、前記基板形状の表面側に設けられていることを特徴とする、請求項1〜4のいずれかに記載の位置検出用治具。
【請求項6】
前記各静電容量検出電極と前記増幅回路とを接続する各配線と、前記各静電容量検出電極は、当該配線や静電容量検出電極と同電位に維持可能なガード配線によって覆われていることを特徴とする、請求項5に記載の位置検出用治具。
【請求項7】
前記基板形状の表面側には、搬送アームの位置調整を行うための外部の制御部と前記制御回路との間で通信する無線回路が設けられていることを特徴とする、請求項1〜6のいずれかに記載の位置検出用治具。
【請求項8】
前記静電容量検出電極は、前記基板形状の裏面側の搬送アームに支持される位置にも設けられていることを特徴とする、請求項1〜7のいずれかに記載の位置検出用治具。
【請求項9】
前記静電容量検出電極は、フォトリソグラフィー工程により形成されていることを特徴とする、請求項1〜8のいずれかに記載の位置検出用治具。
【請求項10】
前記静電容量検出電極は、スクリーン印刷工程により形成されていることを特徴とする、請求項1〜8のいずれかに記載の位置検出用治具。
【請求項11】
前記基板形状の裏面には、前記静電容量検出電極を覆うように絶縁材からなる保護膜が形成されていることを特徴とする、請求項1〜10のいずれかに記載の位置検査用治具。
【請求項12】
前記搬送アームの搬送先は、基板を保持して回転させる回転保持部であって、
前記基板形状の表面側の中心部には、基板形状が前記回転保持部に保持され回転された状態で、当該基板形状の中心部の加速度を測定する加速度センサが設けられていることを特徴とする、請求項1〜11のいずれかに記載の位置検出用治具。
【請求項13】
前記基板形状の表面側には、前記基板形状周囲の雰囲気の湿度を測定する湿度センサが設けられていることを特徴とする、請求項1〜12のいずれかに記載の位置検出用治具。
【請求項14】
前記基板形状の表面側には、前記基板形状周囲の雰囲気の温度を測定する温度センサが設けられていることを特徴とする、請求項1〜13のいずれかに記載の位置検出用治具。
【請求項1】
基板を保持して搬送する搬送アームの搬送先の位置調整を行うための位置検出用治具であって、
搬送アームが搬送可能な基板形状を有し、
位置調整の目標物との間の静電容量を検出する静電容量検出センサを有し、
前記静電容量検出センサは、目標物との間で静電容量を形成する複数の静電容量検出電極と、前記静電容量検出電極と通信し、静電容量検出電極による静電容量の検出を制御する制御回路と、を有し、
前記静電容量検出電極は、基板形状の裏面側に設けられ、
前記制御回路は、基板形状の表面側に設けられていることを特徴とする、位置検出用治具。
【請求項2】
前記基板形状には、裏面側から表面側に通じる複数の通電路が形成され、
前記各静電容量検出電極は、前記通電路を通って前記制御回路に接続されていることを特徴とする、請求項1に記載の位置検出用治具。
【請求項3】
前記複数の通電路は、前記基板形状の外周部に形成されていることを特徴とする、請求項2に記載の位置検出用治具。
【請求項4】
前記複数の通電路は、前記基板形状の外周部に環状に配置され、
前記静電容量検出電極は、前記通電路よりも前記基板形状の裏面の中央側に配置され、
前記基板形状の裏面において、前記各静電容量検出電極と各導電路とを接続する配線は放射状に形成されていることを特徴とする、請求項3に記載の位置検出用治具。
【請求項5】
前記各静電容量検出電極と前記制御回路を接続する各配線には、静電容量検出電極により検出された静電容量の信号を増幅する増幅回路が設けられ、
前記増幅回路は、前記基板形状の表面側に設けられていることを特徴とする、請求項1〜4のいずれかに記載の位置検出用治具。
【請求項6】
前記各静電容量検出電極と前記増幅回路とを接続する各配線と、前記各静電容量検出電極は、当該配線や静電容量検出電極と同電位に維持可能なガード配線によって覆われていることを特徴とする、請求項5に記載の位置検出用治具。
【請求項7】
前記基板形状の表面側には、搬送アームの位置調整を行うための外部の制御部と前記制御回路との間で通信する無線回路が設けられていることを特徴とする、請求項1〜6のいずれかに記載の位置検出用治具。
【請求項8】
前記静電容量検出電極は、前記基板形状の裏面側の搬送アームに支持される位置にも設けられていることを特徴とする、請求項1〜7のいずれかに記載の位置検出用治具。
【請求項9】
前記静電容量検出電極は、フォトリソグラフィー工程により形成されていることを特徴とする、請求項1〜8のいずれかに記載の位置検出用治具。
【請求項10】
前記静電容量検出電極は、スクリーン印刷工程により形成されていることを特徴とする、請求項1〜8のいずれかに記載の位置検出用治具。
【請求項11】
前記基板形状の裏面には、前記静電容量検出電極を覆うように絶縁材からなる保護膜が形成されていることを特徴とする、請求項1〜10のいずれかに記載の位置検査用治具。
【請求項12】
前記搬送アームの搬送先は、基板を保持して回転させる回転保持部であって、
前記基板形状の表面側の中心部には、基板形状が前記回転保持部に保持され回転された状態で、当該基板形状の中心部の加速度を測定する加速度センサが設けられていることを特徴とする、請求項1〜11のいずれかに記載の位置検出用治具。
【請求項13】
前記基板形状の表面側には、前記基板形状周囲の雰囲気の湿度を測定する湿度センサが設けられていることを特徴とする、請求項1〜12のいずれかに記載の位置検出用治具。
【請求項14】
前記基板形状の表面側には、前記基板形状周囲の雰囲気の温度を測定する温度センサが設けられていることを特徴とする、請求項1〜13のいずれかに記載の位置検出用治具。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2009−54993(P2009−54993A)
【公開日】平成21年3月12日(2009.3.12)
【国際特許分類】
【出願番号】特願2008−161349(P2008−161349)
【出願日】平成20年6月20日(2008.6.20)
【出願人】(000219967)東京エレクトロン株式会社 (5,184)
【Fターム(参考)】
【公開日】平成21年3月12日(2009.3.12)
【国際特許分類】
【出願日】平成20年6月20日(2008.6.20)
【出願人】(000219967)東京エレクトロン株式会社 (5,184)
【Fターム(参考)】
[ Back to top ]