
位置検出装置、光学機器
【課題】組立て調整時に電極パターンと接点部とを高い精度で位置決めすることができる位置検出装置と、これを具備する光学機器を提供すること。
【解決手段】少なくとも一対の接点部(18a)を有するブラシ部(18)と、前記接点部に摺動しつつ当該接点部に対して相対移動する電極パターン(16)とを備えた位置検出装置(10)であって、前記ブラシ部は、支持部(18b)に接続されて前記電極パターンに沿って延在する第1部分(18e)と、前記第1部分に接続されて前記電極パターン方向に凸形状で当該凸形状の頂点近傍に前記接点部を有する第2部分(18f)とを有し、前記第2部分は、前記ブラシ部を真上から見たとき、前記第1部分における前記電極パターンに沿った軸の両側の少なくとも一方に凸形状に形成されていることを特徴とする位置検出装置。
【解決手段】少なくとも一対の接点部(18a)を有するブラシ部(18)と、前記接点部に摺動しつつ当該接点部に対して相対移動する電極パターン(16)とを備えた位置検出装置(10)であって、前記ブラシ部は、支持部(18b)に接続されて前記電極パターンに沿って延在する第1部分(18e)と、前記第1部分に接続されて前記電極パターン方向に凸形状で当該凸形状の頂点近傍に前記接点部を有する第2部分(18f)とを有し、前記第2部分は、前記ブラシ部を真上から見たとき、前記第1部分における前記電極パターンに沿った軸の両側の少なくとも一方に凸形状に形成されていることを特徴とする位置検出装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置検出装置と、これを有する光学機器に関する。
【背景技術】
【0002】
従来、オートフォーカス機構あるいはズーム機構を有するレンズ鏡筒では、レンズを駆動する際のレンズ位置座標を検出して位置補正するための位置検出エンコーダを備えているものがある(例えば、特許文献1参照)。
【0003】
このような位置検出エンコーダを用いたレンズ鏡筒において、絶対位置検出を高い精度で行うためには、位置検出エンコーダ組立ての際にフレキシブル基板に分割形成された電極パターンと電極であるブラシを高精度に位置合わせする必要がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−71314号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の位置検出エンコーダは、組立て時に電極パターンとブラシとの位置合わせを目視で行っているが、ブラシの接点部の形状が目視で位置決めし難い形状となっており、ブラシと電極パターンとの相対的な傾き等を含め電極パターンと接点部とを高い精度で位置決めすることが難しいという問題がある。
【0006】
本発明は、上記課題に鑑みて行われたものであり、組立て調整時に電極パターンと接点部とを高い精度で位置決めすることができる位置検出装置と、これを具備する光学機器を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、以下のような解決手段により、前記課題を解決する。なお、理解を容易にするために、本発明の実施形態に対応する符号を付して説明するが、これに限定されるものではない。
【0008】
上記課題を解決するため、本発明は、少なくとも一対の接点部(18a)を有するブラシ部(18)と、前記接点部に摺動しつつ当該接点部に対して相対移動する電極パターン(16)とを備えた位置検出装置(10)であって、前記ブラシ部は、支持部(18b)に接続されて前記電極パターンに沿って延在する第1部分(18e)と、前記第1部分に接続されて前記電極パターン方向に凸形状で当該凸形状の頂点近傍に前記接点部を有する第2部分(18f)とを有し、前記第2部分は、前記ブラシ部を真上から見たとき、前記第1部分における前記電極パターンに沿った軸の両側の少なくとも一方に凸形状に形成されていることを特徴とする位置検出装置を提供する。
【0009】
また、本発明は、前記位置検出装置を具備することを特徴とする光学機器(1)を提供する。
【発明の効果】
【0010】
本発明によれば、組立て調整時に電極パターンと接点部とを高い精度で位置決めすることができる位置検出装置と、これを具備する光学機器を提供することができる。
【図面の簡単な説明】
【0011】
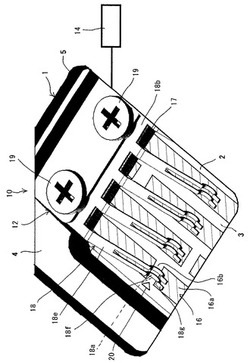
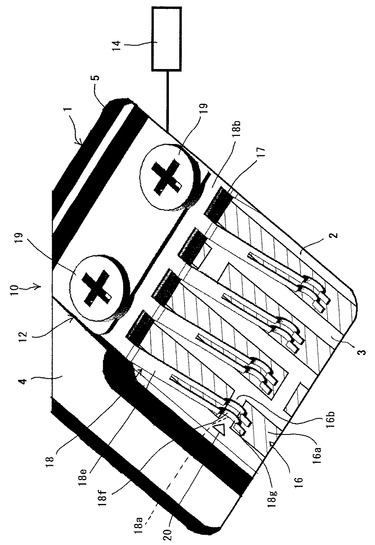
【図1】本発明の実施形態にかかる位置検出装置の電極部分をレンズ鏡筒の開口部から見た状態を模式的に示す図。
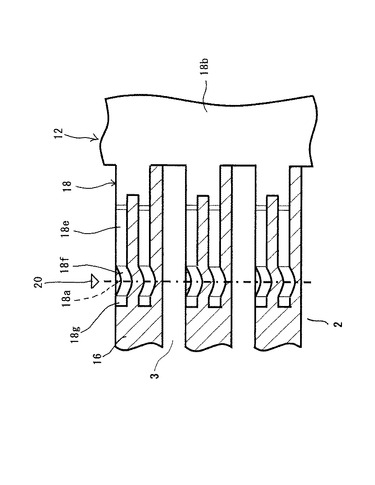
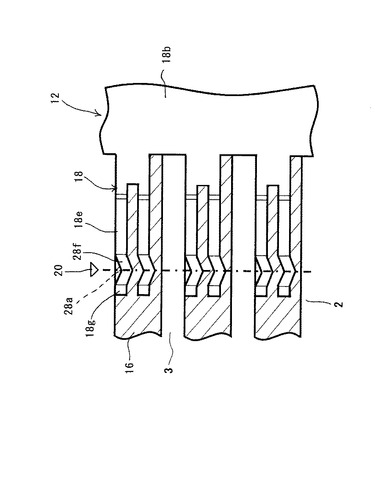
【図2】図1の電極部分を真上から見た状態を模式的に示す図。
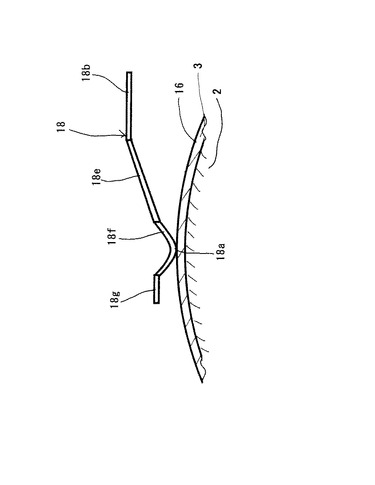
【図3】図2の電極部分を真横から見た状態を模式的に示す図。
【図4】実施形態にかかる電極部分を真上から見た状態におけるブラシの第1変形例を模式的に示す図。
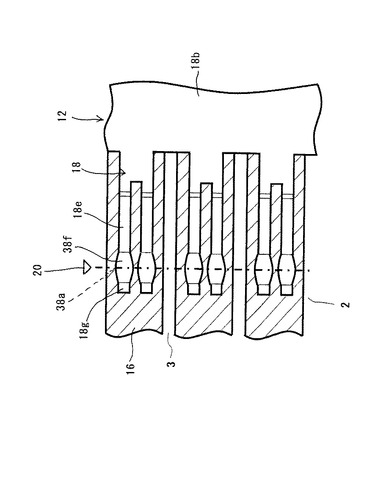
【図5】実施形態にかかる電極部分を真上から見た状態におけるブラシの第2変形例を模式的に示す図。
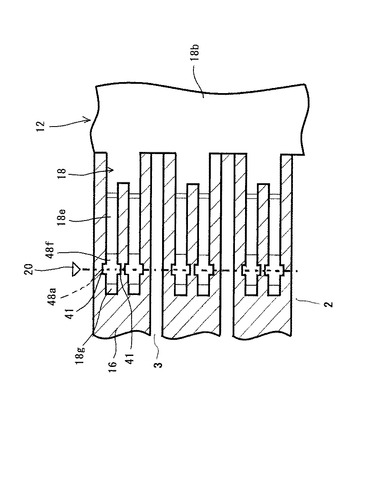
【図6】実施形態にかかる電極部分を真上から見た状態におけるブラシの第3変形例を模式的に示す図。
【発明を実施するための形態】
【0012】
以下、本願の実施の形態にかかる位置検出装置について図面を参照しつつ説明する。なお、以下の実施の形態は、発明の理解を容易にするためのものに過ぎず、本願発明の技術的思想を逸脱しない範囲において当業者により実施可能な付加・置換等を施すことを排除することは意図していない。
【0013】
図1〜図3において、位置検出装置10は、レンズ鏡筒1に内蔵されている電極部分12と、この電極部分12が検出した信号により位置座標を演算する演算部14とから構成されている。
【0014】
電極部分12は、レンズ鏡筒1の回転筒2に接着されたフレキシブル基板3上に形成された複数の電極パターン16と、この電極パターン16の表面に所定の押圧力で接触する少なくとも一対の接点部18a、18aを有する複数のブラシ18が並行して組立てられ構成されている。なお、以下の説明では一つのブラシ18を代表として符号を付して説明するが、他のブラシ18も同等の構成、作用、効果を有することは言うまでもない。また、以後の変形例等の説明においても符号のつけ方は同様である。
【0015】
ブラシ18は、ブラシ18の支持部18bに接続され、この支持部18bはレンズ鏡筒1の固定筒4に形成されたブラシ固定部17に不図示の絶縁シートを介してネジ19、19で固定されている。また、ブラシ18は、支持部18bから電極パターン16の長手方向に延在する第1部分18eと、この第1部分18eに接続されて電極パターン16方向に断面が凸形状(図3参照)でこの凸形状の頂点近傍に接点部18aを有する第2部分18fと、この第2部分18fに接続され上記第1部分の延在する方向で電極パターン16の長手方向に沿って延在する第3部分18gとを有している。なお、第3部分18gは形成されていなくても接点部18aと電極パターン16との接触を保つ作用には影響がないことは言うまでもない。この第3部分18gがあることで後述する位置決め精度をより向上させることができる。
【0016】
また、図2に示すように、ブラシ18部分を真上から見たとき、第2部分18fは、第1部分18eの電極パターン16の長手方向に沿った軸に対して一方向(図2中では下方)に凸形状の円弧形に形成されている。このように、第2部分18fにある接点部18aは、第1部分18eの延長上からずれた位置に形成されている。なお、第2部分18fの凸方向(円弧の頂点方向)は、図2中で下方方向に限らず、上方方向であっても良い。
【0017】
また、図3に示すように、ブラシ18は、支持部18bと第1部分18eとの間で、第2部分18fが電極パターン16方向に屈曲するように形成されている。この屈曲部を有することで、ブラシ18は電極パターン16方向に押圧力を発生して接点部18aを電極パターン16に適度な押圧力で接触させることができる。なお、ブラシ18を形成する金属材料の一例としては、燐青銅などが用いられ、この金属の弾性を利用して押圧力を付与している。
【0018】
また、本実施形態では、ブラシ18は先端が二つに分割されそれぞれ接点部18aを有するように形成されているので、電極パターン16の電極が無い部分(非導通部分)16bと電極がある部分(導通部分)16aとの段差部でブラシ18の第2部分18fが跳ね上がり一方の接点部18aが非接触になったとしても、他方の接点部18aが電極パターンと接触することができるため、振動や跳ね上がり等によるブラシ18の誤動作(接点部18aが電極パターン16に非接触となること)を防止することができる。
【0019】
電極パターン16は、レンズ鏡筒1内の回転筒2の外周面に配設され、ブラシ固定部17は、回転筒2の外周に摺動可能に配置される固定筒4に配設され、この固定筒4に形成された開口部を通してブラシ18が電極パターン16に接触するように構成されている。
【0020】
また固定筒4の外側には、例えば不図示のフォーカスリングやズームリングを有する外側筒5が配設され、フォーカスリングやズームリングに形成されたピンが回転筒2に係合している。使用者が、フォーカスリングやズームリングを回転したとき、この回転がピンを介して回転筒2を回転し、この回転筒2に形成されたカム溝に移動レンズ群のカムピンが係合し、回転筒2の回転に応じて移動レンズ群がレンズ鏡筒1の光軸に沿って移動する。この回転筒2の回転移動により、電極パターン16とブラシ18とが相対的に移動する。このときブラシ18の接点部18aの位置と電極パターン16の導通(16a)・非導通部分(16b)の位置により電極パターン16に通電・非通電信号が得られ、この信号が演算部14に送られて、演算部14が回転筒2の絶対角度から移動レンズ群の絶対位置座標を演算する。なお、回転筒2の回転は、手動に限らず電動モータによって行うように構成するようにしても良い。これにより、オートフォーカス動作や電動ズーム動作が可能になる。
【0021】
不図示の制御部は、不図示のフォーカス制御部あるいはズーム制御部に対して演算部14からの位置座標を用いて適正な補正データを各制御部(例えば、フォーカス制御部あるいはズーム制御部など)に与えることが可能になる。
【0022】
本実施形態にかかる位置検出装置10は、上述のように回転筒2の絶対角度を検出するために使用している。絶対角度を高い精度で検出するためには、電極パターン16に形成された基準位置20(例えば、図1、2中の△マーク位置)にそれぞれのブラシ18の接点部18aを高精度に位置決めする必要があると共に、電極パターン16の長手方向とブラシ18の第1部分18eの長手方向との平行性を確保しつつ組立てる必要がある。
【0023】
本実施形態にかかる位置検出装置10では、接点部18aがある第2部分18fが、ブラシ18部分を真上から見たとき第1部分18eの延長部分からずれて観察される。このため、接点部18aがある第2部分18fの凸形状の頂点部分(編曲点部分)を確実に視認することができ、高い精度で接点部18aと基準位置20とを位置決めすることができる。一方、平行性の確保は、電極パターン16の長手方向のエッジ部とブラシ18の長手方向の第1部分18eと第3部分18gのエッジ部との平行性を確保するように組立てることで得ることができる。
【0024】
なお、上述のレンズ鏡筒1では、電極パターン16は回転筒2の外周部に配設されて回転移動する場合について説明したが、電極パターン16のある筒がレンズ鏡筒1の光軸に沿って移動する移動筒であっても良い。本位置検出装置10を配置することで、移動筒の場合でも、絶対位置座標を高い精度で検出することができる。
【0025】
以上述べたように、本実施形態にかかる位置検出装置10は、ブラシ18の接点部18aを有する第2部分18fが、第1部分18eの延長線上からずらして形成されているので組立てる時に基準位置20を確認しやすいため、基準位置20に対して接点部18aを高い精度で位置決めすることができる。また、位置検出装置10は、電極パターン16の長手方向のエッジ部とブラシ18の第1部分18eのエッジ部とを容易に平行に位置決めして組立てることができる。この結果、電極パターン16が配設された回転筒2の絶対角度を高い精度で検出することが可能になり、移動レンズ群の絶対値座標を取得することができる。
【0026】
(第1変形例)
図4は、本実施形態にかかる位置検出装置10に使用されるブラシ18の第1変形例を示している。実施形態と同様の構成には同じ符号を付し、説明を省略する。
【0027】
図4において、本変形例のブラシ18は、真上から見たとき上述の円弧形の第2部分18fに代わって三角形状の第2部分28fが形成されている。そして、三角形状の第2部分28fの頂点位置に接点部28aが設けられている。その他の構成は上述の実施形態と同様であり、作用、効果も同様である。
【0028】
本変形例では、ブラシ18の第2部分28fが三角形状に形成されており、組立て時にその頂点位置が確認しやすいため、基準位置20に対して接点部28aを高い精度で位置決めすることができる。また、電極パターン16の長手方向のエッジ部とブラシ18の第1部分18eのエッジ部とを容易に平行に位置決めして組立てることができる。この結果、実施形態と同様に電極パターン16が配設された回転筒2の絶対角度を高い精度で検出することが可能になる。
【0029】
(第2変形例)
図5は、本実施形態にかかる位置検出装置10に使用されるブラシ18の第2変形例を示している。実施形態と同様の構成には同じ符号を付し、説明を省略する。
【0030】
図5において、本変形例のブラシ18は、真上から見たとき実施形態の円弧形の第2部分18fに代わって樽状の第2部分38fが形成されている。そして、樽状の第2部分38fの最も膨らんだ位置に接点部38aが設けられている。その他の構成は上述の実施形態と同様であり、作用、効果も同様である。
【0031】
本変形例では、ブラシ18の第2部分38fが樽状に形成されており、組立て時にその頂点位置(最も膨らんだ位置)が確認しやすいため、基準位置20に対して接点部38aを高い精度で位置決めすることができる。また、電極パターン16の長手方向のエッジ部とブラシ18の第1部分18eのエッジ部とを容易に平行に位置決めして組立てることができる。この結果、実施形態と同様に電極パターン16が配設された回転筒2の絶対角度を高い精度で検出することが可能になる。
【0032】
(第3変形例)
図6は、本実施形態にかかる位置検出装置10に使用されるブラシ18の第3変形例を示している。実施形態と同様の構成には同じ符号を付し、説明を省略する。
【0033】
図6において、本変形例のブラシ18は、真上から見たとき実施形態の円弧形の第2部分18fに代わって略中央部両側に突起41,41を有する第2部分48fが形成されている。そして、第2部分48fの突起41,41を結んだ線上に接点部48aが設けられている。その他の構成は上述の実施形態と同様であり、作用、効果も同様である。
【0034】
本変形例では、ブラシ18の第2部分48fの略中央部両側に突起部41,41が形成されており、組立て時にその突起部41,41が確認しやすいため、基準位置20に対して接点部48aを高い精度で位置決めすることができる。また、電極パターン16の長手方向のエッジ部とブラシ18の第1部分18eのエッジ部とを容易に平行に位置決めして組立てることができる。この結果、実施形態と同様に電極パターン16が配設された回転筒2の絶対角度を高い精度で検出することが可能になる。なお、突起の形状は四角形に限らず三角形等の形状であっても良い。三角形状にすることで接点部の位置を視認し易くすることができる。
【0035】
以上述べたように、本実施形態にかかる位置検出装置は、ブラシの接点部の位置を容易に確認しやすい形状に第2部分を形成しているため、組立てる時に基準位置に対して接点部を高い精度で位置決めすることができる。また、位置検出装置は、電極パターンの長手方向のエッジ部とブラシの第1部分のエッジ部とを容易に平行に位置決めして組立てることができる。この結果、電極パターンが配設された回転筒の絶対角度を高い精度で検出することが可能になる。また、電極パターンが光軸沿って直線移動する移動筒に配設されている場合、移動筒の絶対位置座標を高い精度で検出することができる。
【符号の説明】
【0036】
1 レンズ鏡筒
2 回転筒
3 フレキシブル基板
4 固定筒
5 外側筒
10 位置検出装置
12 電極部分
14 演算部
16 電極パターン
17 ブラシ固定部
18 ブラシ
18a、28a、38a、48a 接点部
18b 支持部
18e 第1部分
18f、28f、38f、48f 第2部分
18g 第3部分
19 ネジ
20 基準位置
【技術分野】
【0001】
本発明は、位置検出装置と、これを有する光学機器に関する。
【背景技術】
【0002】
従来、オートフォーカス機構あるいはズーム機構を有するレンズ鏡筒では、レンズを駆動する際のレンズ位置座標を検出して位置補正するための位置検出エンコーダを備えているものがある(例えば、特許文献1参照)。
【0003】
このような位置検出エンコーダを用いたレンズ鏡筒において、絶対位置検出を高い精度で行うためには、位置検出エンコーダ組立ての際にフレキシブル基板に分割形成された電極パターンと電極であるブラシを高精度に位置合わせする必要がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−71314号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の位置検出エンコーダは、組立て時に電極パターンとブラシとの位置合わせを目視で行っているが、ブラシの接点部の形状が目視で位置決めし難い形状となっており、ブラシと電極パターンとの相対的な傾き等を含め電極パターンと接点部とを高い精度で位置決めすることが難しいという問題がある。
【0006】
本発明は、上記課題に鑑みて行われたものであり、組立て調整時に電極パターンと接点部とを高い精度で位置決めすることができる位置検出装置と、これを具備する光学機器を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、以下のような解決手段により、前記課題を解決する。なお、理解を容易にするために、本発明の実施形態に対応する符号を付して説明するが、これに限定されるものではない。
【0008】
上記課題を解決するため、本発明は、少なくとも一対の接点部(18a)を有するブラシ部(18)と、前記接点部に摺動しつつ当該接点部に対して相対移動する電極パターン(16)とを備えた位置検出装置(10)であって、前記ブラシ部は、支持部(18b)に接続されて前記電極パターンに沿って延在する第1部分(18e)と、前記第1部分に接続されて前記電極パターン方向に凸形状で当該凸形状の頂点近傍に前記接点部を有する第2部分(18f)とを有し、前記第2部分は、前記ブラシ部を真上から見たとき、前記第1部分における前記電極パターンに沿った軸の両側の少なくとも一方に凸形状に形成されていることを特徴とする位置検出装置を提供する。
【0009】
また、本発明は、前記位置検出装置を具備することを特徴とする光学機器(1)を提供する。
【発明の効果】
【0010】
本発明によれば、組立て調整時に電極パターンと接点部とを高い精度で位置決めすることができる位置検出装置と、これを具備する光学機器を提供することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の実施形態にかかる位置検出装置の電極部分をレンズ鏡筒の開口部から見た状態を模式的に示す図。
【図2】図1の電極部分を真上から見た状態を模式的に示す図。
【図3】図2の電極部分を真横から見た状態を模式的に示す図。
【図4】実施形態にかかる電極部分を真上から見た状態におけるブラシの第1変形例を模式的に示す図。
【図5】実施形態にかかる電極部分を真上から見た状態におけるブラシの第2変形例を模式的に示す図。
【図6】実施形態にかかる電極部分を真上から見た状態におけるブラシの第3変形例を模式的に示す図。
【発明を実施するための形態】
【0012】
以下、本願の実施の形態にかかる位置検出装置について図面を参照しつつ説明する。なお、以下の実施の形態は、発明の理解を容易にするためのものに過ぎず、本願発明の技術的思想を逸脱しない範囲において当業者により実施可能な付加・置換等を施すことを排除することは意図していない。
【0013】
図1〜図3において、位置検出装置10は、レンズ鏡筒1に内蔵されている電極部分12と、この電極部分12が検出した信号により位置座標を演算する演算部14とから構成されている。
【0014】
電極部分12は、レンズ鏡筒1の回転筒2に接着されたフレキシブル基板3上に形成された複数の電極パターン16と、この電極パターン16の表面に所定の押圧力で接触する少なくとも一対の接点部18a、18aを有する複数のブラシ18が並行して組立てられ構成されている。なお、以下の説明では一つのブラシ18を代表として符号を付して説明するが、他のブラシ18も同等の構成、作用、効果を有することは言うまでもない。また、以後の変形例等の説明においても符号のつけ方は同様である。
【0015】
ブラシ18は、ブラシ18の支持部18bに接続され、この支持部18bはレンズ鏡筒1の固定筒4に形成されたブラシ固定部17に不図示の絶縁シートを介してネジ19、19で固定されている。また、ブラシ18は、支持部18bから電極パターン16の長手方向に延在する第1部分18eと、この第1部分18eに接続されて電極パターン16方向に断面が凸形状(図3参照)でこの凸形状の頂点近傍に接点部18aを有する第2部分18fと、この第2部分18fに接続され上記第1部分の延在する方向で電極パターン16の長手方向に沿って延在する第3部分18gとを有している。なお、第3部分18gは形成されていなくても接点部18aと電極パターン16との接触を保つ作用には影響がないことは言うまでもない。この第3部分18gがあることで後述する位置決め精度をより向上させることができる。
【0016】
また、図2に示すように、ブラシ18部分を真上から見たとき、第2部分18fは、第1部分18eの電極パターン16の長手方向に沿った軸に対して一方向(図2中では下方)に凸形状の円弧形に形成されている。このように、第2部分18fにある接点部18aは、第1部分18eの延長上からずれた位置に形成されている。なお、第2部分18fの凸方向(円弧の頂点方向)は、図2中で下方方向に限らず、上方方向であっても良い。
【0017】
また、図3に示すように、ブラシ18は、支持部18bと第1部分18eとの間で、第2部分18fが電極パターン16方向に屈曲するように形成されている。この屈曲部を有することで、ブラシ18は電極パターン16方向に押圧力を発生して接点部18aを電極パターン16に適度な押圧力で接触させることができる。なお、ブラシ18を形成する金属材料の一例としては、燐青銅などが用いられ、この金属の弾性を利用して押圧力を付与している。
【0018】
また、本実施形態では、ブラシ18は先端が二つに分割されそれぞれ接点部18aを有するように形成されているので、電極パターン16の電極が無い部分(非導通部分)16bと電極がある部分(導通部分)16aとの段差部でブラシ18の第2部分18fが跳ね上がり一方の接点部18aが非接触になったとしても、他方の接点部18aが電極パターンと接触することができるため、振動や跳ね上がり等によるブラシ18の誤動作(接点部18aが電極パターン16に非接触となること)を防止することができる。
【0019】
電極パターン16は、レンズ鏡筒1内の回転筒2の外周面に配設され、ブラシ固定部17は、回転筒2の外周に摺動可能に配置される固定筒4に配設され、この固定筒4に形成された開口部を通してブラシ18が電極パターン16に接触するように構成されている。
【0020】
また固定筒4の外側には、例えば不図示のフォーカスリングやズームリングを有する外側筒5が配設され、フォーカスリングやズームリングに形成されたピンが回転筒2に係合している。使用者が、フォーカスリングやズームリングを回転したとき、この回転がピンを介して回転筒2を回転し、この回転筒2に形成されたカム溝に移動レンズ群のカムピンが係合し、回転筒2の回転に応じて移動レンズ群がレンズ鏡筒1の光軸に沿って移動する。この回転筒2の回転移動により、電極パターン16とブラシ18とが相対的に移動する。このときブラシ18の接点部18aの位置と電極パターン16の導通(16a)・非導通部分(16b)の位置により電極パターン16に通電・非通電信号が得られ、この信号が演算部14に送られて、演算部14が回転筒2の絶対角度から移動レンズ群の絶対位置座標を演算する。なお、回転筒2の回転は、手動に限らず電動モータによって行うように構成するようにしても良い。これにより、オートフォーカス動作や電動ズーム動作が可能になる。
【0021】
不図示の制御部は、不図示のフォーカス制御部あるいはズーム制御部に対して演算部14からの位置座標を用いて適正な補正データを各制御部(例えば、フォーカス制御部あるいはズーム制御部など)に与えることが可能になる。
【0022】
本実施形態にかかる位置検出装置10は、上述のように回転筒2の絶対角度を検出するために使用している。絶対角度を高い精度で検出するためには、電極パターン16に形成された基準位置20(例えば、図1、2中の△マーク位置)にそれぞれのブラシ18の接点部18aを高精度に位置決めする必要があると共に、電極パターン16の長手方向とブラシ18の第1部分18eの長手方向との平行性を確保しつつ組立てる必要がある。
【0023】
本実施形態にかかる位置検出装置10では、接点部18aがある第2部分18fが、ブラシ18部分を真上から見たとき第1部分18eの延長部分からずれて観察される。このため、接点部18aがある第2部分18fの凸形状の頂点部分(編曲点部分)を確実に視認することができ、高い精度で接点部18aと基準位置20とを位置決めすることができる。一方、平行性の確保は、電極パターン16の長手方向のエッジ部とブラシ18の長手方向の第1部分18eと第3部分18gのエッジ部との平行性を確保するように組立てることで得ることができる。
【0024】
なお、上述のレンズ鏡筒1では、電極パターン16は回転筒2の外周部に配設されて回転移動する場合について説明したが、電極パターン16のある筒がレンズ鏡筒1の光軸に沿って移動する移動筒であっても良い。本位置検出装置10を配置することで、移動筒の場合でも、絶対位置座標を高い精度で検出することができる。
【0025】
以上述べたように、本実施形態にかかる位置検出装置10は、ブラシ18の接点部18aを有する第2部分18fが、第1部分18eの延長線上からずらして形成されているので組立てる時に基準位置20を確認しやすいため、基準位置20に対して接点部18aを高い精度で位置決めすることができる。また、位置検出装置10は、電極パターン16の長手方向のエッジ部とブラシ18の第1部分18eのエッジ部とを容易に平行に位置決めして組立てることができる。この結果、電極パターン16が配設された回転筒2の絶対角度を高い精度で検出することが可能になり、移動レンズ群の絶対値座標を取得することができる。
【0026】
(第1変形例)
図4は、本実施形態にかかる位置検出装置10に使用されるブラシ18の第1変形例を示している。実施形態と同様の構成には同じ符号を付し、説明を省略する。
【0027】
図4において、本変形例のブラシ18は、真上から見たとき上述の円弧形の第2部分18fに代わって三角形状の第2部分28fが形成されている。そして、三角形状の第2部分28fの頂点位置に接点部28aが設けられている。その他の構成は上述の実施形態と同様であり、作用、効果も同様である。
【0028】
本変形例では、ブラシ18の第2部分28fが三角形状に形成されており、組立て時にその頂点位置が確認しやすいため、基準位置20に対して接点部28aを高い精度で位置決めすることができる。また、電極パターン16の長手方向のエッジ部とブラシ18の第1部分18eのエッジ部とを容易に平行に位置決めして組立てることができる。この結果、実施形態と同様に電極パターン16が配設された回転筒2の絶対角度を高い精度で検出することが可能になる。
【0029】
(第2変形例)
図5は、本実施形態にかかる位置検出装置10に使用されるブラシ18の第2変形例を示している。実施形態と同様の構成には同じ符号を付し、説明を省略する。
【0030】
図5において、本変形例のブラシ18は、真上から見たとき実施形態の円弧形の第2部分18fに代わって樽状の第2部分38fが形成されている。そして、樽状の第2部分38fの最も膨らんだ位置に接点部38aが設けられている。その他の構成は上述の実施形態と同様であり、作用、効果も同様である。
【0031】
本変形例では、ブラシ18の第2部分38fが樽状に形成されており、組立て時にその頂点位置(最も膨らんだ位置)が確認しやすいため、基準位置20に対して接点部38aを高い精度で位置決めすることができる。また、電極パターン16の長手方向のエッジ部とブラシ18の第1部分18eのエッジ部とを容易に平行に位置決めして組立てることができる。この結果、実施形態と同様に電極パターン16が配設された回転筒2の絶対角度を高い精度で検出することが可能になる。
【0032】
(第3変形例)
図6は、本実施形態にかかる位置検出装置10に使用されるブラシ18の第3変形例を示している。実施形態と同様の構成には同じ符号を付し、説明を省略する。
【0033】
図6において、本変形例のブラシ18は、真上から見たとき実施形態の円弧形の第2部分18fに代わって略中央部両側に突起41,41を有する第2部分48fが形成されている。そして、第2部分48fの突起41,41を結んだ線上に接点部48aが設けられている。その他の構成は上述の実施形態と同様であり、作用、効果も同様である。
【0034】
本変形例では、ブラシ18の第2部分48fの略中央部両側に突起部41,41が形成されており、組立て時にその突起部41,41が確認しやすいため、基準位置20に対して接点部48aを高い精度で位置決めすることができる。また、電極パターン16の長手方向のエッジ部とブラシ18の第1部分18eのエッジ部とを容易に平行に位置決めして組立てることができる。この結果、実施形態と同様に電極パターン16が配設された回転筒2の絶対角度を高い精度で検出することが可能になる。なお、突起の形状は四角形に限らず三角形等の形状であっても良い。三角形状にすることで接点部の位置を視認し易くすることができる。
【0035】
以上述べたように、本実施形態にかかる位置検出装置は、ブラシの接点部の位置を容易に確認しやすい形状に第2部分を形成しているため、組立てる時に基準位置に対して接点部を高い精度で位置決めすることができる。また、位置検出装置は、電極パターンの長手方向のエッジ部とブラシの第1部分のエッジ部とを容易に平行に位置決めして組立てることができる。この結果、電極パターンが配設された回転筒の絶対角度を高い精度で検出することが可能になる。また、電極パターンが光軸沿って直線移動する移動筒に配設されている場合、移動筒の絶対位置座標を高い精度で検出することができる。
【符号の説明】
【0036】
1 レンズ鏡筒
2 回転筒
3 フレキシブル基板
4 固定筒
5 外側筒
10 位置検出装置
12 電極部分
14 演算部
16 電極パターン
17 ブラシ固定部
18 ブラシ
18a、28a、38a、48a 接点部
18b 支持部
18e 第1部分
18f、28f、38f、48f 第2部分
18g 第3部分
19 ネジ
20 基準位置
【特許請求の範囲】
【請求項1】
少なくとも一対の接点部を有するブラシ部と、
前記接点部に摺動しつつ当該接点部に対して相対移動する電極パターンとを備えた位置検出装置であって、
前記ブラシ部は、支持部に接続されて前記電極パターンに沿って延在する第1部分と、前記第1部分に接続されて前記電極パターン方向に凸形状で当該凸形状の頂点近傍に前記接点部を有する第2部分とを有し、
前記第2部分は、前記ブラシ部を真上から見たとき、前記第1部分における前記電極パターンに沿った軸の両側の少なくとも一方に凸形状に形成されていることを特徴とする位置検出装置。
【請求項2】
前記ブラシ部は、前記電極パターンの相対移動方向に略直交する方向の幅が略等しいことを特徴とする請求項1に記載の位置検出装置。
【請求項3】
前記電極部は、複数の前記ブラシ部を有し、
複数の前記ブラシ部は互いに並行に形成されていることを特徴とする請求項1または2に記載の位置検出装置。
【請求項4】
前記ブラシ部は、前記第2部分に接続されて前記第1部分と同方向に延在する第3部分をさらに有することを特徴とする請求項1から3のいずれか一項に記載の位置検出装置。
【請求項5】
前記ブラシの前記接点部が前記電極パターンと接触した位置に応じて位置座標を演算する演算部を有することを特徴とする請求項1から4のいずれか一項に記載の位置検出装置。
【請求項6】
請求項1から5のいずれか一項に記載の位置検出装置を具備することを特徴とする光学機器。
【請求項1】
少なくとも一対の接点部を有するブラシ部と、
前記接点部に摺動しつつ当該接点部に対して相対移動する電極パターンとを備えた位置検出装置であって、
前記ブラシ部は、支持部に接続されて前記電極パターンに沿って延在する第1部分と、前記第1部分に接続されて前記電極パターン方向に凸形状で当該凸形状の頂点近傍に前記接点部を有する第2部分とを有し、
前記第2部分は、前記ブラシ部を真上から見たとき、前記第1部分における前記電極パターンに沿った軸の両側の少なくとも一方に凸形状に形成されていることを特徴とする位置検出装置。
【請求項2】
前記ブラシ部は、前記電極パターンの相対移動方向に略直交する方向の幅が略等しいことを特徴とする請求項1に記載の位置検出装置。
【請求項3】
前記電極部は、複数の前記ブラシ部を有し、
複数の前記ブラシ部は互いに並行に形成されていることを特徴とする請求項1または2に記載の位置検出装置。
【請求項4】
前記ブラシ部は、前記第2部分に接続されて前記第1部分と同方向に延在する第3部分をさらに有することを特徴とする請求項1から3のいずれか一項に記載の位置検出装置。
【請求項5】
前記ブラシの前記接点部が前記電極パターンと接触した位置に応じて位置座標を演算する演算部を有することを特徴とする請求項1から4のいずれか一項に記載の位置検出装置。
【請求項6】
請求項1から5のいずれか一項に記載の位置検出装置を具備することを特徴とする光学機器。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−88605(P2013−88605A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−228853(P2011−228853)
【出願日】平成23年10月18日(2011.10.18)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月18日(2011.10.18)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
[ Back to top ]