
位置検出装置及びシフト装置
【課題】磁石の着磁パターン等を含む構成の簡素化及び体格の小型化を図りつつ、位置検出に対する信頼性を確保することができる位置検出装置及びシフト装置を提供する。
【解決手段】シフトレバーに連動して直線的に変位する磁石14は、その変位方向に対して交わる方向に2極着磁された第1の磁極部31と、当該変位方向に沿って多極着磁された第2の磁極部32とを備える。また、第1の磁極部31に対応する複数個の磁界方向検出型の磁気センサ、及び第2の磁極部32に対応する複数個の単極検出型の磁気センサも備える。磁界方向検出型の磁気センサは磁石14の変位に伴う磁界方向の変化に応じた、また単極検出型の磁気センサは対応する磁極の極性に応じた二値信号をそれぞれ生成する。各磁気センサにおいて生成される二値信号の組み合わせは、ハミング符号に準拠する。
【解決手段】シフトレバーに連動して直線的に変位する磁石14は、その変位方向に対して交わる方向に2極着磁された第1の磁極部31と、当該変位方向に沿って多極着磁された第2の磁極部32とを備える。また、第1の磁極部31に対応する複数個の磁界方向検出型の磁気センサ、及び第2の磁極部32に対応する複数個の単極検出型の磁気センサも備える。磁界方向検出型の磁気センサは磁石14の変位に伴う磁界方向の変化に応じた、また単極検出型の磁気センサは対応する磁極の極性に応じた二値信号をそれぞれ生成する。各磁気センサにおいて生成される二値信号の組み合わせは、ハミング符号に準拠する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検出対象の位置を非接触で検出する磁気式の位置検出装置及びシフト装置に関する。
【背景技術】
【0002】
近年では、車両の自動変速機とシフト装置とを機械的に分離した、いわゆるバイワイヤ方式のシフト装置が普及しつつある。このシフト装置では、ユーザにより操作されるシフトレバーの操作位置を摺動接点あるいは磁気センサを通じて電気信号として検出し、当該電気信号に基づきアクチュエータを作動させることにより自動変速機の接続状態を切り替えることから、リンク機構等の機械的な構成が不要となる。このため、シフト装置の小型化が容易になるとともに、設置場所の選択の自由度が高められるといった利点がある。
【0003】
こうしたシフト装置では、特に操作位置の検出に対する高い信頼性が要求されるところ、例えば特許文献1に示されるようなシフト装置が従来提案されている。当該装置では、シフトレバーの操作に伴い複数個のホールセンサと平面上に多極着磁された磁石とを相対的に変位させて当該変位に応じて各ホールセンサから出力される信号の組合せに基づき、シフトレバーの操作位置を検出する。各ホールセンサは、磁界を検出したときにはオン信号(論理「1」)を、磁界を検出しないときにはオフ信号(論理「0」)を出力する。そして当該装置では、十字状あるいは直線状のシフトゲートに沿って変位するシフトレバーの5つの操作位置を検出可能とされているところ、このシフトレバーが各操作位置に操作された際に各ホールセンサから出力される信号の組合せが、誤り訂正符号をなすように、磁石の着磁パターン及び各ホールセンサの配置が設定されている。このため、各ホールセンサからの出力信号の組合せ(シフトレバーの操作位置を示すシフトポジション信号)のデータに符号誤り(エラー)が発生した場合にそれを検出、あるいは検出して訂正することが可能となる。この誤り検出あるいは誤り訂正により、シフト装置(その位置検出装置)の位置検出処理に対する信頼性が確保される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−148352号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、特許文献1に記載のシフト装置には、次のような問題があった。例えば十字状のシフトゲートに対応する場合には、同一平面に多極着磁、しかも着磁パターンの異なる複数個の小磁石を組み合わせて全体として所望の着磁パターンを有する磁石を構成している。特殊な形状の磁石を用意する必要があるとともに、各小磁石、ひいてはそれらを組み合わせて構成される着磁パターンが非常に複雑なものとなっている。また、直線状のシフトゲートに対応する場合には、検出する操作位置の数と同数だけ着磁パターンを設定する必要がある。このため、磁石の大型化、ひいてはシフト装置の体格の大型化が懸念される。また、設計コスト、ひいては製造コストの増大のおそれもある。なお、こうした問題は、シフト装置に限らず、複数方向に操作される例えばジョイスティック等の入力装置についても同様に発生する。
【0006】
本発明は上記問題点を解決するためになされたものであって、その目的は、磁石の着磁パターン等を含む構成の簡素化及び体格の小型化を図りつつ、位置検出に対する信頼性を確保することができる位置検出装置及びシフト装置を提供することにある。
【課題を解決するための手段】
【0007】
請求項1に記載の発明は、位置検出装置において、操作部材の操作に連動して直線的に変位するとともに、当該変位方向に対して交わる方向に2極着磁された第1の磁石と、前記第1の磁石と一体的に直線変位するとともに、当該変位方向に沿って多極着磁された第2の磁石と、前記第1の磁石に対して相対変位可能に設けられるとともに、当該第1の磁石の変位に伴う磁界方向の変化を検出する複数個の磁界方向検出型の磁気センサと、前記第2の磁石に対して相対変位可能に設けられるとともに、S極及びN極のいずれか一方の磁界を検出する複数個の単極検出型の磁気センサと、を備え、前記各磁気センサにおける磁界の検出結果に応じて生成される二値信号の組合せに基づき操作部材の操作位置を検出する制御装置と、を備え、前記二値信号の組み合わせが、前記操作部材に連動する前記第1及び第2の磁石の位置情報を構成するデータビットと、前記二値信号の組み合わせにおける1つの二値信号の誤りを訂正するためのチェックビットとを含むハミング符号に準拠したものとなるように、前記第1の磁石に対する前記磁界方向検出型の磁気センサの相対位置関係、及び前記第2の磁石の変位方向における各磁極の着磁幅が設定されてなることをその要旨とする。
【0008】
本発明によれば、各磁気センサにおける磁界の検出結果に応じて生成される二値信号の組合せが、ハミング符号に準拠するため、1つの誤り訂正、あるいは2つの誤り検出が可能となる。これにより、磁石の位置に対応する操作部材の操作位置の検出に対する信頼性が確保可能となる。
【0009】
また、第1及び第2の磁石の着磁パターンについても単純なものとなる。すなわち、第1の磁石は、その変位方向に対して交わる方向においてS極とN極との2極に着磁するだけでよい。第2の磁石は、その変位方向に沿ってN極とS極とを交互に着磁するだけでよい。このため、第1及び第2の磁石の着磁パターン、ひいてはこれら磁石の構成の簡素化が図られる。
【0010】
さらに、第1の磁石はその着磁方向から見たときに放射状をなす磁界を発するところ、この第1の磁石に対応して磁界方向検出型の各磁気センサが集中して配設される。磁界方向検出型の磁気センサは、第1の磁石の直線変位に伴い変化する磁界方向に応じた検出結果を生成する。また、第2の磁石はその変位方向に多極着磁されるところ、この第2の磁石に対応して単極検出型の各磁気センサが集中して配設される。単極検出型の磁気センサは、自身に対応する磁極の極性に応じた検出結果を生成する。ちなみに、第2の磁石の直線変位に伴い単極検出型の磁気センサに対応する磁極の極性は、N極とS極との間で交互に切り替わる。このように、磁界の検出原理(センサ出力態様)が異なる2種類の磁気センサを組み合わせて使用することにより、より少ないセンサ数で操作部材の位置検出が可能となる。また、磁界方向検出型の各磁気センサは第1の磁石に、また単極検出型の各磁気センサは第2の磁石にそれぞれ対応して集中配置されることにより、位置検出装置の小型化が可能となる。
【0011】
請求項2に記載の発明は、請求項1に記載の位置検出装置において、前記第1及び第2の磁石は一体的に形成されるとともに、これら磁極部の境界部分には磁石素材からなる磁化をもたない未着磁部が設けられてなることをその要旨とする。
【0012】
本発明によれば、第1及び第2の磁石が一体的に形成されることにより、部品点数の低減化が図られる。また、第1及び第2の磁石間に、磁石素材からなる未着磁部を設けることにより、第1の磁石から発せられる放射状磁界が第2の磁石側へ広がることが抑制される。これは、第1の磁石から第2の磁石側へ向かう磁界は未着磁部の内部に閉じ込められるからである。第1及び第2の磁石からそれぞれ発せられる磁界が相互に干渉し合うことが抑制されることにより、磁界方向検出型及び単極検出型の各磁気センサの検出結果に対する信頼性が確保される。また、第1及び第2の磁石間に未着磁部を設けることにより、第1の磁石と第2の磁石との近接配置も可能となり、ひいては位置検出装置のいっそうの小型化が可能となる。
【0013】
請求項3に記載の発明は、請求項1又は請求項2に記載の位置検出装置において、前記第1の磁石は半円柱状をなして、また前記第2の磁石はその変位方向へ延びる直方体状をなして形成され、前記第1の磁石の平坦面と前記第2の磁石の長側面とが一体的に接合されてなることをその要旨とする。
【0014】
本発明によれば、第1の磁石が半円柱状に形成されることにより、放射状磁界が好適に形成される。また、第2の磁石はその変位方向へ延びる直方体状に形成するだけでよいので、構成の簡素化が図られる。形成も容易である。
【0015】
請求項4に記載の発明は、直線状に配置して設定される複数の操作位置間を変位する操作部材と、当該操作部材の操作位置を検出する位置検出装置とを備え、当該位置検出装置の検出結果に基づき車両の変速機の接続状態を切り替えるシフト装置において、前記位置検出装置として、請求項1〜3のうちいずれか一項に記載の位置検出装置が採用されてなることをその要旨とする。
【0016】
本発明によれば、1つの磁気センサの故障を検出して訂正可能とした非接触式のシフト装置を構築可能となる。
【発明の効果】
【0017】
本発明によれば、磁石の着磁パターン等を含む構成の簡素化及び体格の小型化を図りつつ、位置検出に対する信頼性を確保することができる。
【図面の簡単な説明】
【0018】
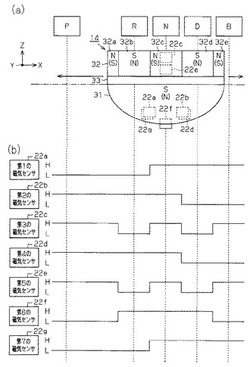
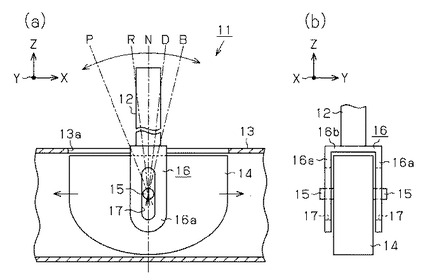
【図1】(a)は、シフト装置の概略構成を示す正面図、(b)は、シフト装置の平面図。
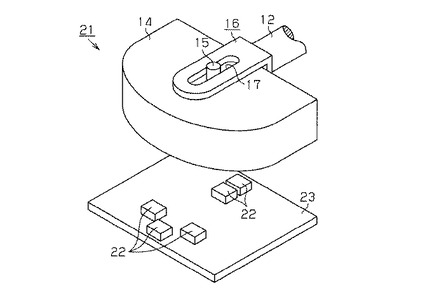
【図2】磁石と基板との相対的な位置関係を示す要部斜視図。
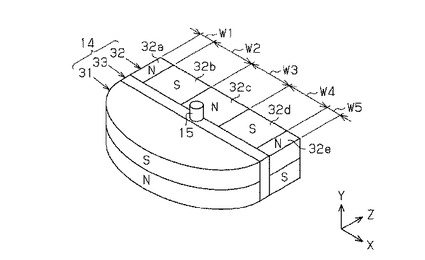
【図3】磁石の斜視図。
【図4】各磁気センサの配置態様を示す基板の正面図。
【図5】第1の磁極部に対応する各磁気センサの配置態様を示す図4の1−1線矢視図。
【図6】第2の磁極部に対応する各磁気センサの配置態様を示す図4の2−2線矢視図。
【図7】(a),(b)は、MRセンサの概略構成を示す回路図、(c)は、MRセンサの配置角度を示す一覧表。
【図8】(a),(b)は、ホールセンサの極性毎の出力態様を示す側面図。
【図9】(a)は、シフトレバーの各操作位置と磁石の位置との関係を示す磁石の正面図、(b)は、シフトレバーの各操作位置と各磁気センサ出力との関係を示す波形図。
【図10】シフト装置の電気的な構成を示すブロック図。
【図11】各磁気センサにおいて生成される二値信号の組合せとシフトレバーの操作位置との関係を示す一覧表。
【発明を実施するための形態】
【0019】
以下、本発明を、エンジン及びモータを走行用の駆動源とするハイブリッド車両に搭載されるバイワイヤ方式のシフト装置に具体化した一実施の形態を図1〜図11に基づいて説明する。このシフト装置は、例えば自動車の車室フロアにおける運転席と助手席との間、あるいはインストルメントパネルにおける運転席の近傍に配設される。
【0020】
<シフト装置の概要>
図1(a)に示すように、シフト装置11のシフトレバー12は、その基端部を中心として直線状(同図中の左右方向へ延びるX軸方向)に揺動可能に設けられている。すなわち、図示しない車体には、レール13が固定されている。レール13は、合成樹脂材料によりシフトレバー12の操作方向(X軸方向)へ延びる四角筒状に形成されている。レール13の内部には、磁石14が当該レール13に沿って直線状にスライド変位可能に設けられている。磁石14は、その下部に円弧面が形成された直方体状に形成されている。磁石14は、その円弧面が図1(a)中の下方(Y軸方向)を向くように配設されている。磁石14は、その円弧面及び当該円弧面と反対側の上面がレール13の内面に対して摺動することにより、レール13の延びる方向に対して直交する方向(Y軸方向)への変位が規制される。
【0021】
図1(b)に示すように、磁石14の変位方向及びシフトレバー12の延びる方向の双方に直交する方向(Y軸方向)において互いに反対側に位置する2つの側面の中央付近には、それぞれ円柱状の軸15が突設されている。これら軸15には、磁石14の変位方向(X軸方向)から見てコの字状をなす支持部材16が装着されている。この支持部材16は、互いに対向する2つの支持壁16a及びこれら支持壁16aの上部間を連結する連結壁16bが合成樹脂材料により一体形成されてなる。
【0022】
図1(a)に併せて示されるように、両支持壁16aには、同図中の上方(Y軸方向)へ延びる長孔17がそれぞれ形成されている。これら長孔17には軸15が内側から挿入されている。支持部材16は軸15を中心として回転可能とされている。支持部材16の回転に伴い、軸15は長孔17に対して相対的にその内部を上下方向へ変位する。支持部材16の上面、すなわち連結壁16bの上面には、軸状のシフトレバー12が固定されている。シフトレバー12の軸15と反対側の先端部はレール13に形成された開口部13aを介して外部に突出している。
【0023】
したがって、シフトレバー12の左右方向への揺動は、軸15が支持部材16の長孔17内を変位することにより、磁石14の左右方向への直線運動に変換される。すなわち、シフトレバー12の傾動操作に連動して、磁石14は同図中の左右方向へスライド変位する。磁石14は、シフトレバー12の操作を通じて、当該シフトレバー12の操作方向と反対側へ変位する。シフト装置11に内蔵される位置検出装置は、シフトレバー12に連動して磁石14が直線状にスライド変位することを利用して、当該シフトレバー12の操作位置を検出する。この検出されるシフトレバー12の操作位置に応じて自動変速機の接続状態が切り換えられる。
【0024】
なお、本例では、シフトレバー12の操作位置として、駐車位置(P)、後進位置(R)、中立位置(N)、前進位置(D)及び回生ブレーキ位置(B)が設定されるところ、これら操作位置は直線状に配置される。シフトレバー12の各操作位置間の傾動量(操作角度)は、駐車位置(P)及び後進位置(R)間の操作量を除き、同一とされている。具体的には、後進位置(R)及び中立位置(N)間、中立位置(N)及び前進位置(D)間、並びに前進位置(D)及び回生ブレーキ位置(B)間の操作量はすべて同じ値、且つ、駐車位置(P)及び後進位置(R)間の操作量よりも小さな値とされている。そしてシフトレバー12の各操作位置と、磁石14の位置とは一対一で対応する。また、シフト装置11は、シフトレバー12の操作位置が保持される保持型(ステーショナリタイプ)、あるいは当該操作位置が特定の基準位置に自動復帰する復帰型(モーメンタリタイプ)のいずれのタイプとして構成してもよい。
【0025】
<位置検出装置>
次に、シフトレバー12の操作位置を検出する位置検出装置について説明する。図2に示すように、位置検出装置21は、前述した磁石14と、当該磁石14から発せられる磁界を検出する複数個の磁気センサ22とを備えてなる。各磁気センサ22は、磁石14の軸15が形成された2つの側面のいずれか一方に対向して配設される基板23に設けられている。各磁気センサ22の基板23に対する配置パターン及び磁石14に対する相対的な位置関係については後に詳述する。
【0026】
<磁石>
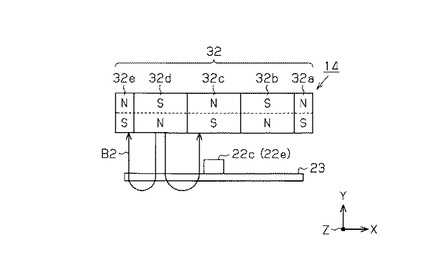
図3示すように、磁石14は、半円柱状の第1の磁極部31、直方体状の第2の磁極部32、これらの間に介在される直方体状の未着磁部33を備えてなる。第1の磁極部31及び未着磁部33、並びに未着磁部33及び第2の磁極部32は、相互に接合されてなる。未着磁部33は、強磁性体等の磁石素材により直方体状に形成されている。第1の磁極部31は、軸15の延びる方向(Y軸方向)においてS極とN極とが2極着磁されている。第2の磁極部32は、軸15の延びる方向に直交する方向、すなわち磁石14の変位方向(X軸方向)において多極着磁されている。本例では、第1〜第5の磁極32a,32b,32c,32d,32eが設けられている。第1〜第5の磁極32a〜32eの図3における上側の部位の極性は、この順にN極、S極、N極、S極、N極とされており、同じく下側の部位の極性は前述した上側の部位と反対の極性とされている(図6参照)。第2の磁極部32において、第1〜第5の磁極32a〜32eの磁石14の変位方向における着磁幅W1〜W5は次のように設定されている。
【0027】
・W1=W5<W2=W3=W4
すなわち、第2の磁極部32において磁石14の変位方向における両端に位置する第1及び第5の磁極32a,32eの着磁幅W1,W5は同じ値に設定されている。また、第2の磁極部32において第1及び第5の磁極32a,32e間に挟まれる第2〜第4の磁極32b〜32dの着磁幅W2,W3,W4は、第1及び第5の磁極32a,32eの着磁幅W1,W5よりも大きな同じ値に設定されている。本例では、第2〜第4の磁極32b〜32dの着磁幅W2〜W4は、次の関係式に示されるように、第1及び第5の磁極32a,32eの着磁幅W1,W5の2倍の値に設定されている。なお、次の関係式において「/」は除算を示す。
【0028】
・W1=W5=W2/2=W3/2=W4/2
<磁気センサ>
次に、各磁気センサ22、並びにこれらの基板23に対する配置パターン及び磁石14に対する相対的な位置関係について説明する。
【0029】
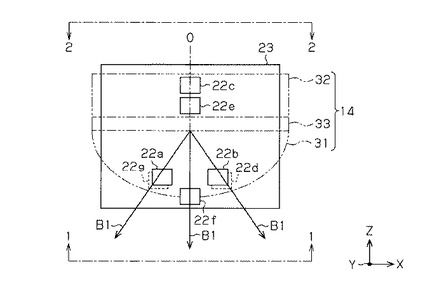
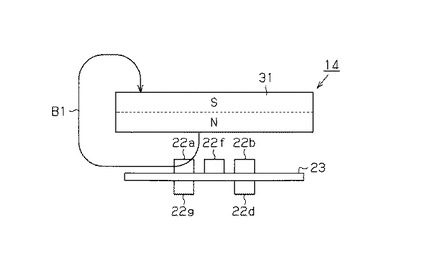
図4に示すように、基板23には第1〜第7の磁気センサ22a〜22gが設けられている。具体的には、第1、第2及び第6の磁気センサ22a,22b,22f、並びに、第3及び第5の磁気センサ22c,22eは、基板23の磁石14に対向する側面に設けられている。また、図5に併せて示されるように、第4及び第7の磁気センサ22d,22gは、基板23の磁石14と反対側の側面に設けられている。
【0030】
図4に示されるように、第1、第2及び第6の磁気センサ22a,22b,22f、並びに第4及び第7の磁気センサ22d,22gは、磁石14の第1の磁極部31(正確には、その移動軌跡)に対応するように設けられている。第1及び第2の磁気センサ22a,22bは、磁石14の変位方向(X軸方向)において、第6の磁気センサ22fを間に挟むかたちで設けられている。そして、基板23の表裏において、第4の磁気センサ22dは第2の磁気センサ22bに、第7の磁気センサ22gは第1の磁気センサ22aにそれぞれ一致するように設けられている。なお、図4では、説明の便宜上、第4及び第7の磁気センサ22d,22gは、第2及び第1の磁気センサ22b,22aに対して若干ずらして示す。したがって、第1、第2及び第6の磁気センサ22a,22b,22f、並びに第4及び第7の磁気センサ22d,22gには、図4に矢印B1で示されるように、第1の磁極部31から発せられる放射状の磁界が印加される。シフトレバー12の操作に連動する磁石14のX軸方向への変位に伴い、第1、第2及び第6の磁気センサ22a,22b,22f、並びに第4及び第7の磁気センサ22d,22gに印加される磁界の方向は変化する。
【0031】
なお、図4は、シフトレバー12が中立位置(N)に操作されたときの磁石14と各磁気センサ22との相対的な位置関係を示す。また、シフトレバー12の各操作位置に対応する磁石14の位置は、当該磁石14を軸15側から見たときに当該磁石14の変位方向に対して直交する方向へ延びる中心軸Oの位置を示す。この磁石14と各磁気センサ22との相対的な位置関係については、後に詳述する。
【0032】
第6の磁気センサ22f、並びに第3及び第5の磁気センサ22c,22eは、磁石14の変位方向(X軸方向)に対して直交する方向(Z軸方向)において一列に配設されている。また、第3及び第5の磁気センサ22c,22eは、磁石14の第2の磁極部32(正確には、その移動軌跡)に対応するように設けられている。したがって、第3及び第5の磁気センサ22c,22eには、図6に矢印B2で示されるように、第2の磁極部32から発せられるN極からS極へ向かう磁界が、当該第3及び第5の磁気センサ22c,22eの感磁面(図6中の上面)に対して垂直に印加される。
【0033】
<MRセンサ>
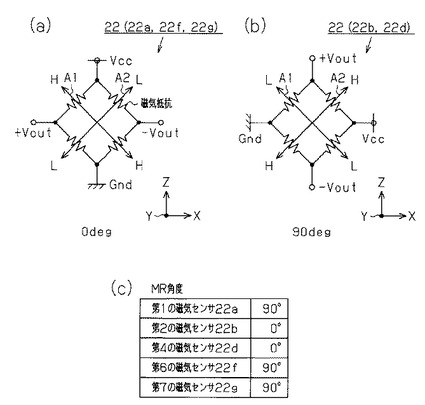
第1、第2、第4、第6及び第7の磁気センサ22a,22b,22d,22f,22gとしては、図7(a),(b)に示されるように、4つの磁気抵抗(MRE)がブリッジ状に接続されてなるいわゆるフルブリッジ型のMRセンサが採用されている。このMRセンサは、各磁気抵抗のブリッジ回路及びその信号処理回路が単一のICチップとして集積回路化されてなる。磁気抵抗の抵抗値は、与えられる磁界(正確には、磁束の向き)に応じて変化する。
【0034】
各MRセンサは、前述したブリッジ状の回路の中点電位(アナログ信号)+Vout,−Voutを、前記信号処理回路を構成するコンパレータを通じて、「1(ハイ)」又は「0(ロー)」の二値信号とする。すなわち、各MRセンサは、磁石14のスライド変位に伴う磁界(磁束)の方向の変化に応じて、「1(ハイ)」又は「0(ロー)」の二値信号を生成する。
【0035】
図7(a)に示されるように、第1、第6及び第7の磁気センサ22a,22f,22gは、これらに付与される磁界の方向が磁石14の変位方向(X軸方向)に対して−45度(+135度)の角度をなす時に最大値を、同じく+45度(+225度)の角度をなす時に最小値をとる正弦波状のアナログ信号を生成する。すなわち、第1、第6及び第7の磁気センサ22a,22f,22gは、これらに対して矢印A1で示される方向に沿う磁界が印加された場合には「1(ハイ)」、同じく当該矢印A1に直交する矢印A2で示される方向に沿う磁界が印加された場合には「0(ロー)」を二値信号として生成する。
【0036】
ここで、図7(c)の表に示されるように、第1、第6及び第7の磁気センサ22a,22f,22gの磁石14に対する配置角度を0°とした場合、第2及び第4の磁気センサ22b,22dの磁石14に対する配置角度は90°とされている。このため、図7(b)に示されるように、第2及び第4の磁気センサ22b,22dは、これらに付与される磁界の方向が磁石14の変位方向(X軸方向)に対して−45度(+135度)の角度をなす時に最小値を、同じく+45度(+225度)の角度をなす時に最大値をとる正弦波状のアナログ信号を生成する。すなわち、第2及び第4の磁気センサ22b,22dは、これらに対して矢印A1で示される方向に沿う磁界が印加された場合には「0(ロー)」、同じく当該矢印A1に直交する矢印A2で示される方向に沿う磁界が印加された場合には「1(ハイ)」を二値信号として生成する。
【0037】
<ホールセンサ>
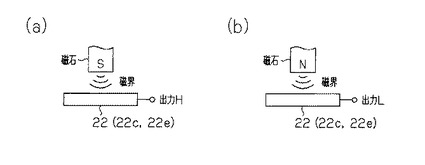
第3及び第5の磁気センサ22c,22eとしては、ホール素子を使用したホールセンサが採用されている。本例では、S極のみ、あるいはN極のみの磁界を検出する、いわゆる単極検出タイプのものが採用されている。具体的には、本例で採用されるホールセンサは、図8(a)に示されるようにS極の磁界が印加された場合には「1(ハイ)」を、図8(b)に示されるようにN極の磁界が印加された場合には「0(ロー)」を二値信号として生成する。
【0038】
<磁気センサの出力態様>
次に、シフトレバー12が各操作位置に操作されたときの各磁気センサ22の出力態様について説明する。
【0039】
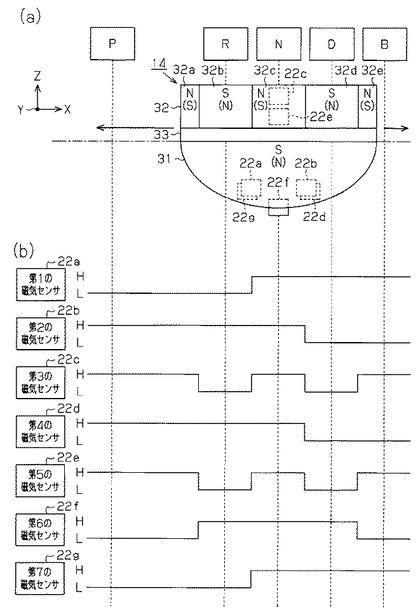
磁石14は、図9(a)の上部に四角枠で囲って示されるシフトレバー12の各操作位置(P,R,N,D,B)に対応する位置間を変位する。なお、図9(a)では、磁石14の位置は、当該磁石14を軸15側から見たときに当該磁石14の変位方向(X軸方向)に対して直交する方向(Z軸方向)へ延びる中心軸Oの位置を示す。また図9(a)では、磁石14を各磁気センサ22の反対側から見た状態を示す。さらに図9(a)では、磁石14の各磁気センサ22に対向する側の極性をかっこ書きで示す。
【0040】
例えば、シフトレバー12が中立位置(N)に操作されたとき、磁石14は、図9(a)に示されるように、第2の磁極部32の第3の磁極32cが、第3及び第5の磁気センサ22c,22eに対応する位置をとる。換言すれば、磁石14を軸15側から見たとき、当該磁石14の変位方向に対して直交する方向へ延びる中心軸Oが、第3、第5及び第6の磁気センサ22c,22e,22fを通る位置に、磁石14は位置する。
【0041】
そして、シフトレバー12が駐車位置(P)から回生ブレーキ位置(B)までの間において操作されたとき、各磁気センサ22の出力態様は次のようになる。
すなわち、図9(b)に示されるように、第1の磁気センサ22aは、磁石14が駐車位置(P)に対応する位置から中立位置(N)に対応する位置までの間にあるときにはローレベルの信号「論理0」を、中立位置(N)に対応する位置から回生ブレーキ位置(B)に対応する位置までの間にあるときにはハイレベルの信号「論理1」を生成する。これは、第1の磁気センサ22aとして、MRセンサが採用されているからである。すなわち、MRセンサは、磁石14がスライド変位した場合であれ、先の図7(a),(b)に矢印A1,A2で示される特定方向への磁界が印加される限り、当該磁界の方向に応じてハイレベルあるいはローレベルの信号を生成する。
【0042】
第2の磁気センサ22bは、磁石14が駐車位置(P)に対応する位置から中立位置(N)に対応する位置までの間にあるときにはハイレベルの信号「論理1」を、中立位置(N)に対応する位置から回生ブレーキ位置(B)に対応する位置までの間にあるときにはローレベルの信号「論理1」を生成する。なお、第4の磁気センサ22dも同様である。
【0043】
第3の磁気センサ22cは、磁石14が駐車位置(P)に対応する位置→後進位置(R)に対応する位置→中立位置(N)に対応する位置→前進位置(D)に対応する位置→回生ブレーキ位置(B)に対応する位置へ変位するたびに、ハイレベルの信号とローレベルの信号とを交互に生成する。これは、第3の磁気センサ22cとして、単極検出タイプのホールセンサが採用されているからである。すなわち、磁石14のスライド変位に伴い、第3の磁気センサ22cに対応する磁石14(正確には、第2の磁極部32)の極性がS極とN極との間で交互に切り替わる。このため、磁石14のスライド変位に伴い、第3の磁気センサ22cは、ハイレベルの信号とローレベルの信号とを交互に生成する。なお、第5の磁気センサ22eも同様である。
【0044】
第6の磁気センサ22fは、磁石14が駐車位置(P)及び回生ブレーキ位置(B)に対応する位置にあるときにはそれぞれローレベルの信号「論理0」を、後進位置(R)から前進位置(D)に対応する位置までの間にあるときにはハイレベルの信号「論理1」を生成する。
【0045】
第7の磁気センサ22gは、磁石14が駐車位置(P)及び後進位置(R)に対応する位置にあるときにはそれぞれローレベルの信号「論理0」を、中立位置(N)に対応する位置から回生ブレーキ位置(B)に対応する位置までの間にあるときにはハイレベルの信号「論理1」を生成する。
【0046】
このように本例では、シフトレバー12が各操作位置に操作された場合に各磁気センサ22において生成される二値信号(出力論理)の組合せがすべて異なるように、磁石14の着磁パターン、及び当該磁石14に対する各磁気センサ22の相対的な位置関係が設定される。すなわち、シフトレバー12の操作に連動する磁石14の位置に応じて第1〜第7の磁気センサ22a〜22gにおいて生成される二値信号の組合せに基づきシフトレバー12の操作位置を特定可能となる。
【0047】
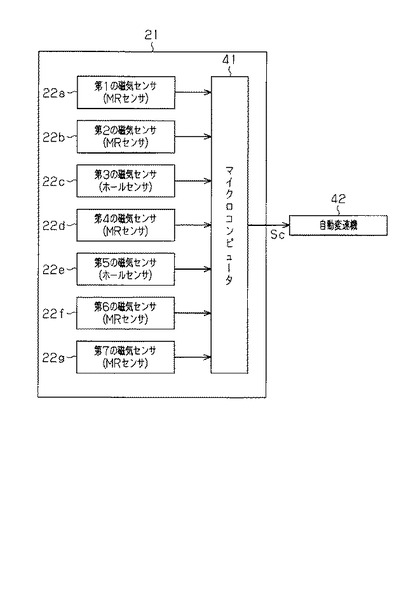
図10に示すように、シフト装置11のマイクロコンピュータ41は、第1〜第7の磁気センサ22a〜22gから供給される二値信号の組合せに基づきシフトレバー12の操作位置を認識し、この認識されるシフトレバー12の操作位置に応じて自動変速機42に対する変速指令信号Scを生成する。自動変速機42は、当該変速指令信号Scを受けて内部の動力伝達経路の接続状態の切り替えを行う。
【0048】
<ハミング符号>
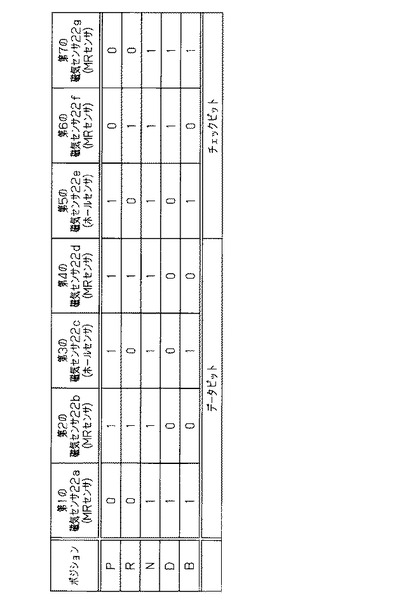
本例では、シフトレバー12が各操作位置に操作された場合に、各磁気センサ22において生成される二値信号の組合せがハミング符号に準拠するように、磁石14の着磁パターン及び当該磁石14に対する各磁気センサ22の相対的な位置関係が調節されている。シフトレバー12の各操作位置と、各磁気センサ22から供給される二値信号との組合せは、例えば図11の一覧表に示されるようになる。同図において、各行はシフトレバー12の操作位置(P,R,N,D,B)を、各列は第1〜第7の磁気センサ22a〜22gを示す。同図に示される「1」及び「0」の二値信号(論理レベル)は、先の図9(b)に示される各磁気センサ22の出力電圧レベルに対応している。すなわち、ハイレベルの信号(H)は論理レベル「1」、ローレベルの信号(L)は論理レベル「0」に対応する。
【0049】
同図に示されるように、シフトレバー12が駐車位置(P)に操作された場合、各二値信号の組合せは、「0111100」となる。シフトレバー12が駐車位置(R)に操作された場合、各二値信号の組合せは、「0101010」となる。シフトレバー12が駐車位置(N)に操作された場合、各二値信号の組合せは、「1111111」となる。シフトレバー12が駐車位置(D)に操作された場合、各二値信号の組合せは、「1000011」となる。シフトレバー12が駐車位置(B)に操作された場合、各二値信号の組合せは、「1010101」となる。
【0050】
ここで、ハミング符号とは、データ通信の際に通信路で生ずる符号誤りを訂正し通信の信頼性を高めるための誤り訂正符号のひとつである。本例では、このハミング符号を用いることにより、各二値信号の組み合わせにおける1つの誤りを検出して訂正することが可能となる。また、各二値信号の組み合わせにおける2つの誤りを検出することが可能となる。
【0051】
ハミング符号は、データビット(情報ビット)にチェックビット(冗長ビット)を付加したものである。データビットは、送信したい情報、すなわち本例ではシフトレバー12の操作位置(正確には、当該操作位置に対応する磁石14の位置)を示す情報を構成する。チェックビットは、誤りの検出及び訂正を行うためにデータビットに付加される情報である。本例では、第1〜第4の磁気センサ22a〜22dにおいて生成される二値信号がデータビットとされている。また、第5〜第7の磁気センサ22e〜22gにおいて生成される二値信号がチェックビットとされている。
【0052】
マイクロコンピュータ41は、各二値信号の組み合わせに基づいて、磁石14の各位置に対応する二値信号の組み合わせの1つの誤り信号に一対一で対応する誤り信号位置情報を生成する。そしてマイクロコンピュータ41は、当該誤り信号位置情報に基づいて、前記二値信号の組み合わせの誤り信号位置を特定し、この特定された誤り信号位置の二値信号を訂正する。
【0053】
前記自動変速機の接続状態を切り替えるに際して、マイクロコンピュータ41は、各磁気センサ22から供給される二値信号の組合せの誤りの有無を判定し、誤りがある旨判定される場合にはその誤りを訂正する。そして、マイクロコンピュータ41は、訂正した二値信号の組み合わせに基づきシフトレバー12の操作位置を認識する。
【0054】
<実施の形態の効果>
したがって、本実施の形態によれば、以下の効果を得ることができる。
(1)本例の位置検出装置21は、シフトレバー12の操作に連動して直線的に変位する磁石14を備える。この磁石14は、その変位方向に対して交わる方向に2極着磁された第1の磁極部31と、当該変位方向に沿って多極着磁された第2の磁極部32とを備えてなる。また、位置検出装置21は、第1の磁極部31に対して相対変位可能に設けられる複数個の磁界方向検出型の磁気センサ(22a,22b,22d,22f,22g)、および第2の磁極部32に対して相対変位可能に設けられる複数個の単極検出型の磁気センサ(22c,22e)も備えてなる。磁界方向検出型の磁気センサは、第1の磁極部31の変位に伴う磁界方向の変化を検出し、当該磁界方向に応じた二値信号を生成する。また、単極検出型の磁気センサは、S極及びN極のいずれか一方の磁界を検出し、当該極性に応じた二値信号を生成する。位置検出装置21のマイクロコンピュータ41は、各磁気センサにおける磁界の検出結果に応じて生成される二値信号の組合せに基づきシフトレバー12の操作位置を検出する。そして、本例では、各磁気センサにおいて生成される二値信号の組み合わせが、ハミング符号に準拠するため、1つの誤り訂正、あるいは2つの誤り検出が可能となる。これにより、磁石の位置に対応する操作部材の操作位置の検出に対する信頼性が確保可能となる。
【0055】
(2)また、第1及び第2の磁極部31,32の着磁パターンについても単純なものとなる。すなわち、第1の磁極部31は、その変位方向に対して交わる方向においてS極とN極との2極に着磁するだけでよい。第2の磁極部32は、その変位方向に沿ってN極とS極とを交互に着磁するだけでよい。このため、第1及び第2の磁極部31,32、すなわち磁石14の着磁パターンを含む構成の簡素化が図られる。
【0056】
(3)さらに、第1の磁極部31はその着磁方向から見たときに放射状をなす磁界を発するところ、この第1の磁極部31に対応して磁界方向検出型の各磁気センサ(22a,22b,22d,22f,22g)が集中して配設される。磁界方向検出型の磁気センサは、第1の磁極部31の直線変位に伴い変化する磁界方向に応じた二値信号を生成する。また、第2の磁極部32はその変位方向に多極着磁されるところ、この第2の磁極部32に対応して単極検出型の各磁気センサ(22c,22e)が集中して配設される。単極検出型の磁気センサは、自身に対応する磁極の極性に応じた二値信号を生成する。ちなみに、第2の磁極部32の直線変位に伴い単極検出型の磁気センサに対応する磁極の極性は、N極とS極との間で交互に切り替わる。このように、磁界の検出原理(センサ出力態様)が異なる2種類の磁気センサを組み合わせて使用することにより、より少ないセンサ数で操作部材の位置検出が可能となる。また、磁界方向検出型の各磁気センサは第1の磁極部31に、また単極検出型の各磁気センサは第2の磁極部32にそれぞれ対応して集中配置されることにより、位置検出装置21、ひいてはシフト装置11の体格の小型化が可能となる。
【0057】
(4)第1及び第2の磁極部31,32を有する磁石14は一体的に形成される。また、この磁石14において、第1及び第2の磁極部31,32の境界部分には磁石素材からなる磁化をもたない未着磁部33が設けられてなる。この構成によれば、第1及び第2の磁極部31,32を有する磁石14が一体的に形成されることにより、部品点数の低減化が図られる。また、第1及び第2の磁極部31,32間に、磁石素材からなる未着磁部33を設けることにより、第1の磁極部31から発せられる放射状磁界が第2の磁極部32側へ広がることが抑制される。これは、第1の磁極部31から第2の磁極部32側へ向かう磁界は未着磁部33の内部に閉じ込められるからである。第1及び第2の磁極部31,32からそれぞれ発せられる磁界が相互に干渉し合うことが抑制されることにより、磁界方向検出型及び単極検出型の各磁気センサの検出結果に対する信頼性が確保される。また、第1及び第2の磁極部31,32間に未着磁部33を設けることにより、第1の磁極部31と第2の磁極部32との近接配置も可能となり、ひいては位置検出装置21のいっそうの小型化が可能となる。
【0058】
(5)第1の磁極部31は半円柱状をなして、また第2の磁極部32はその変位方向へ延びる直方体状をなして形成され、第1の磁極部31の平坦面と第2の磁極部32の長側面とが一体的に接合されてなる。この構成によれば、第1の磁極部31が半円柱状に形成されることにより、放射状磁界が好適に形成される。また、第2の磁極部32はその変位方向へ延びる直方体状に形成するだけでよいので、構成の簡素化が図られる。また、形成も容易である。
【0059】
(6)1つの磁気センサの故障を検出して訂正可能とした非接触式のシフト装置11を構築可能となる。このため、シフトレバー12の操作位置の検出に対する信頼性を確保することができる。また、前述したように、位置検出装置21の構成の簡素化及び体格の小型化が図られることにより、シフト装置11全体の構成の簡素化及び体格の小型化も図られる。
【0060】
(7)磁界方向検出型の各磁気センサは、第1の磁極部31に対応して設けられる基板23の表裏両面に分散して配設されてなる。この構成によれば、磁気センサをより狭い領域に集中して設けることが可能となるので、位置検出装置21、ひいてはシフト装置11のいっそうの小型化が図られる。
【0061】
(8)磁界方向検出型の磁気センサとして、磁気抵抗効果を利用したMRセンサを採用した。このMRセンサは、その配置角度を変えることにより、同方向の磁界に対して異なる出力が得られる。このため、配置角度の異なる複数個のMRセンサを組み合わせることにより、それらのセンサ出力(二値信号)の組合せにバリエーションを容易に持たせることができる。また、集中配置にも好適である。
【0062】
<他の実施の形態>
なお、前記実施の形態は、次のように変更して実施してもよい。
・本例では、磁石14に2つの軸15を設けたが、単一の軸15を設けるのみとしてもよい。この場合であれ、磁石14は、レール13に沿って安定してスライド変位する。また、この場合には、磁石14の軸15と反対側の側面に基板23を配設することが好ましい。軸15と基板23との干渉の有無等を考慮する必要がなくなるからである。
【0063】
・各二値化信号において、1つもしくは2つの誤りを検知した場合、マイクロコンピュータ41は、例えば車室内に設けられるインジケータランプ等の報知装置を通じて、その旨報知するようにしてもよい。また、マイクロコンピュータ41は、各二値化信号の組み合わせの誤りを訂正不能と判断した場合、自動変速機42の接続状態をニュートラルに切り替える旨指令する変速指令信号Scを生成するようにしてもよい。
【0064】
・第3及び第5の磁気センサ22c,22eを基板23の表裏において互いに一致するように設けてもよい。
・本例では、シフトレバー12の操作位置に応じた変速指令信号Scを生成するようにしたが、単にシフトレバー12の操作位置を示す信号を生成するようにしてもよい。この場合には、自動変速機42側の電子制御装置は、シフト装置11のマイクロコンピュータ41から供給される信号に基づきシフトレバー12の操作位置を判定し、この判定される操作位置に応じて自動変速機42の動力伝達経路の切り換え制御を実行する。
【0065】
・本例では、MRセンサとして、いわゆるフルブリッジ側のMRセンサを採用したが、例えば2つの磁気抵抗が直列に接続されてなるいわゆるハーフブリッジ型のMRセンサを採用してもよい。
【0066】
・各磁気センサ22において生成される二値信号の組合せは、図11の一覧表に示されるものに限られない。磁石14の着磁パターン及び各磁気センサ22の磁石14に対する相対的な位置関係の調節を通じて、異なる組合せとすることも可能である。
【0067】
・シフト装置11に限らず、ジョイスティック型の入力装置等にも適用可能である。また、シフトレバー等の軸状の部材の操作位置を検出するものに限られず、例えば特定の方向へスライド操作する摘みの操作位置を検出するようにしてもよい。この場合には、摘みは磁石14と一体的に変位可能に設ける。
【0068】
・未着磁部33は省略してもよい。このようにしても、第1の磁極部31では磁石14の移動軌跡に沿う仮想平面に対して平行をなす放射状の磁界が形成され、第2の磁極部32では磁石14の移動軌跡に沿う仮想平面に対して直交する方向の磁界が形成される。
【0069】
・本例では、第1の磁極部31、第2の磁極部32、及び未着磁部33を一体的に形成したが、これらを別部材として構成することも可能である。この場合には、これら部材を単一の樹脂ケースに収容して一体化する。軸15は当該樹脂ケースに設ける。
【0070】
<他の技術的思想>
次に、前記実施の形態から把握できる技術的思想を以下に追記する。
・請求項1〜請求項3のうちいずれか一項に記載の位置検出装置において、前記磁界方向検出型の磁気センサとして磁気抵抗効果を利用したMRセンサが、前記単極検出型の磁気センサとしてホール効果を利用したホールセンサが採用されてなる位置検出装置。
【0071】
・請求項1〜請求項3のうちいずれか一項に記載の位置検出装置において、前記磁界方向検出型の各磁気センサは、前記第1の磁石に対応して設けられる基板の表裏両面に分散して配設されてなる位置検出装置。
【0072】
この構成によれば、磁気センサをより狭い領域に集中して設けることが可能となるので、位置検出装置のいっそうの小型化が図られる。
【符号の説明】
【0073】
11…シフト装置、12…シフトレバー(操作部材)、14…磁石、21…位置検出装置、22…磁気センサ、22a,22b,22d,22f,22g…磁界方向検出型の磁気センサ(MRセンサ)、22c,22e…単極検出型の磁気センサ(ホールセンサ)、31…第1の磁極部(第1の磁石)、32…第2の磁極部(第2の磁石)、33…未着磁部、41…マイクロコンピュータ(制御装置)、42…自動変速機、W1〜W5…着磁幅。
【技術分野】
【0001】
本発明は、検出対象の位置を非接触で検出する磁気式の位置検出装置及びシフト装置に関する。
【背景技術】
【0002】
近年では、車両の自動変速機とシフト装置とを機械的に分離した、いわゆるバイワイヤ方式のシフト装置が普及しつつある。このシフト装置では、ユーザにより操作されるシフトレバーの操作位置を摺動接点あるいは磁気センサを通じて電気信号として検出し、当該電気信号に基づきアクチュエータを作動させることにより自動変速機の接続状態を切り替えることから、リンク機構等の機械的な構成が不要となる。このため、シフト装置の小型化が容易になるとともに、設置場所の選択の自由度が高められるといった利点がある。
【0003】
こうしたシフト装置では、特に操作位置の検出に対する高い信頼性が要求されるところ、例えば特許文献1に示されるようなシフト装置が従来提案されている。当該装置では、シフトレバーの操作に伴い複数個のホールセンサと平面上に多極着磁された磁石とを相対的に変位させて当該変位に応じて各ホールセンサから出力される信号の組合せに基づき、シフトレバーの操作位置を検出する。各ホールセンサは、磁界を検出したときにはオン信号(論理「1」)を、磁界を検出しないときにはオフ信号(論理「0」)を出力する。そして当該装置では、十字状あるいは直線状のシフトゲートに沿って変位するシフトレバーの5つの操作位置を検出可能とされているところ、このシフトレバーが各操作位置に操作された際に各ホールセンサから出力される信号の組合せが、誤り訂正符号をなすように、磁石の着磁パターン及び各ホールセンサの配置が設定されている。このため、各ホールセンサからの出力信号の組合せ(シフトレバーの操作位置を示すシフトポジション信号)のデータに符号誤り(エラー)が発生した場合にそれを検出、あるいは検出して訂正することが可能となる。この誤り検出あるいは誤り訂正により、シフト装置(その位置検出装置)の位置検出処理に対する信頼性が確保される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−148352号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、特許文献1に記載のシフト装置には、次のような問題があった。例えば十字状のシフトゲートに対応する場合には、同一平面に多極着磁、しかも着磁パターンの異なる複数個の小磁石を組み合わせて全体として所望の着磁パターンを有する磁石を構成している。特殊な形状の磁石を用意する必要があるとともに、各小磁石、ひいてはそれらを組み合わせて構成される着磁パターンが非常に複雑なものとなっている。また、直線状のシフトゲートに対応する場合には、検出する操作位置の数と同数だけ着磁パターンを設定する必要がある。このため、磁石の大型化、ひいてはシフト装置の体格の大型化が懸念される。また、設計コスト、ひいては製造コストの増大のおそれもある。なお、こうした問題は、シフト装置に限らず、複数方向に操作される例えばジョイスティック等の入力装置についても同様に発生する。
【0006】
本発明は上記問題点を解決するためになされたものであって、その目的は、磁石の着磁パターン等を含む構成の簡素化及び体格の小型化を図りつつ、位置検出に対する信頼性を確保することができる位置検出装置及びシフト装置を提供することにある。
【課題を解決するための手段】
【0007】
請求項1に記載の発明は、位置検出装置において、操作部材の操作に連動して直線的に変位するとともに、当該変位方向に対して交わる方向に2極着磁された第1の磁石と、前記第1の磁石と一体的に直線変位するとともに、当該変位方向に沿って多極着磁された第2の磁石と、前記第1の磁石に対して相対変位可能に設けられるとともに、当該第1の磁石の変位に伴う磁界方向の変化を検出する複数個の磁界方向検出型の磁気センサと、前記第2の磁石に対して相対変位可能に設けられるとともに、S極及びN極のいずれか一方の磁界を検出する複数個の単極検出型の磁気センサと、を備え、前記各磁気センサにおける磁界の検出結果に応じて生成される二値信号の組合せに基づき操作部材の操作位置を検出する制御装置と、を備え、前記二値信号の組み合わせが、前記操作部材に連動する前記第1及び第2の磁石の位置情報を構成するデータビットと、前記二値信号の組み合わせにおける1つの二値信号の誤りを訂正するためのチェックビットとを含むハミング符号に準拠したものとなるように、前記第1の磁石に対する前記磁界方向検出型の磁気センサの相対位置関係、及び前記第2の磁石の変位方向における各磁極の着磁幅が設定されてなることをその要旨とする。
【0008】
本発明によれば、各磁気センサにおける磁界の検出結果に応じて生成される二値信号の組合せが、ハミング符号に準拠するため、1つの誤り訂正、あるいは2つの誤り検出が可能となる。これにより、磁石の位置に対応する操作部材の操作位置の検出に対する信頼性が確保可能となる。
【0009】
また、第1及び第2の磁石の着磁パターンについても単純なものとなる。すなわち、第1の磁石は、その変位方向に対して交わる方向においてS極とN極との2極に着磁するだけでよい。第2の磁石は、その変位方向に沿ってN極とS極とを交互に着磁するだけでよい。このため、第1及び第2の磁石の着磁パターン、ひいてはこれら磁石の構成の簡素化が図られる。
【0010】
さらに、第1の磁石はその着磁方向から見たときに放射状をなす磁界を発するところ、この第1の磁石に対応して磁界方向検出型の各磁気センサが集中して配設される。磁界方向検出型の磁気センサは、第1の磁石の直線変位に伴い変化する磁界方向に応じた検出結果を生成する。また、第2の磁石はその変位方向に多極着磁されるところ、この第2の磁石に対応して単極検出型の各磁気センサが集中して配設される。単極検出型の磁気センサは、自身に対応する磁極の極性に応じた検出結果を生成する。ちなみに、第2の磁石の直線変位に伴い単極検出型の磁気センサに対応する磁極の極性は、N極とS極との間で交互に切り替わる。このように、磁界の検出原理(センサ出力態様)が異なる2種類の磁気センサを組み合わせて使用することにより、より少ないセンサ数で操作部材の位置検出が可能となる。また、磁界方向検出型の各磁気センサは第1の磁石に、また単極検出型の各磁気センサは第2の磁石にそれぞれ対応して集中配置されることにより、位置検出装置の小型化が可能となる。
【0011】
請求項2に記載の発明は、請求項1に記載の位置検出装置において、前記第1及び第2の磁石は一体的に形成されるとともに、これら磁極部の境界部分には磁石素材からなる磁化をもたない未着磁部が設けられてなることをその要旨とする。
【0012】
本発明によれば、第1及び第2の磁石が一体的に形成されることにより、部品点数の低減化が図られる。また、第1及び第2の磁石間に、磁石素材からなる未着磁部を設けることにより、第1の磁石から発せられる放射状磁界が第2の磁石側へ広がることが抑制される。これは、第1の磁石から第2の磁石側へ向かう磁界は未着磁部の内部に閉じ込められるからである。第1及び第2の磁石からそれぞれ発せられる磁界が相互に干渉し合うことが抑制されることにより、磁界方向検出型及び単極検出型の各磁気センサの検出結果に対する信頼性が確保される。また、第1及び第2の磁石間に未着磁部を設けることにより、第1の磁石と第2の磁石との近接配置も可能となり、ひいては位置検出装置のいっそうの小型化が可能となる。
【0013】
請求項3に記載の発明は、請求項1又は請求項2に記載の位置検出装置において、前記第1の磁石は半円柱状をなして、また前記第2の磁石はその変位方向へ延びる直方体状をなして形成され、前記第1の磁石の平坦面と前記第2の磁石の長側面とが一体的に接合されてなることをその要旨とする。
【0014】
本発明によれば、第1の磁石が半円柱状に形成されることにより、放射状磁界が好適に形成される。また、第2の磁石はその変位方向へ延びる直方体状に形成するだけでよいので、構成の簡素化が図られる。形成も容易である。
【0015】
請求項4に記載の発明は、直線状に配置して設定される複数の操作位置間を変位する操作部材と、当該操作部材の操作位置を検出する位置検出装置とを備え、当該位置検出装置の検出結果に基づき車両の変速機の接続状態を切り替えるシフト装置において、前記位置検出装置として、請求項1〜3のうちいずれか一項に記載の位置検出装置が採用されてなることをその要旨とする。
【0016】
本発明によれば、1つの磁気センサの故障を検出して訂正可能とした非接触式のシフト装置を構築可能となる。
【発明の効果】
【0017】
本発明によれば、磁石の着磁パターン等を含む構成の簡素化及び体格の小型化を図りつつ、位置検出に対する信頼性を確保することができる。
【図面の簡単な説明】
【0018】
【図1】(a)は、シフト装置の概略構成を示す正面図、(b)は、シフト装置の平面図。
【図2】磁石と基板との相対的な位置関係を示す要部斜視図。
【図3】磁石の斜視図。
【図4】各磁気センサの配置態様を示す基板の正面図。
【図5】第1の磁極部に対応する各磁気センサの配置態様を示す図4の1−1線矢視図。
【図6】第2の磁極部に対応する各磁気センサの配置態様を示す図4の2−2線矢視図。
【図7】(a),(b)は、MRセンサの概略構成を示す回路図、(c)は、MRセンサの配置角度を示す一覧表。
【図8】(a),(b)は、ホールセンサの極性毎の出力態様を示す側面図。
【図9】(a)は、シフトレバーの各操作位置と磁石の位置との関係を示す磁石の正面図、(b)は、シフトレバーの各操作位置と各磁気センサ出力との関係を示す波形図。
【図10】シフト装置の電気的な構成を示すブロック図。
【図11】各磁気センサにおいて生成される二値信号の組合せとシフトレバーの操作位置との関係を示す一覧表。
【発明を実施するための形態】
【0019】
以下、本発明を、エンジン及びモータを走行用の駆動源とするハイブリッド車両に搭載されるバイワイヤ方式のシフト装置に具体化した一実施の形態を図1〜図11に基づいて説明する。このシフト装置は、例えば自動車の車室フロアにおける運転席と助手席との間、あるいはインストルメントパネルにおける運転席の近傍に配設される。
【0020】
<シフト装置の概要>
図1(a)に示すように、シフト装置11のシフトレバー12は、その基端部を中心として直線状(同図中の左右方向へ延びるX軸方向)に揺動可能に設けられている。すなわち、図示しない車体には、レール13が固定されている。レール13は、合成樹脂材料によりシフトレバー12の操作方向(X軸方向)へ延びる四角筒状に形成されている。レール13の内部には、磁石14が当該レール13に沿って直線状にスライド変位可能に設けられている。磁石14は、その下部に円弧面が形成された直方体状に形成されている。磁石14は、その円弧面が図1(a)中の下方(Y軸方向)を向くように配設されている。磁石14は、その円弧面及び当該円弧面と反対側の上面がレール13の内面に対して摺動することにより、レール13の延びる方向に対して直交する方向(Y軸方向)への変位が規制される。
【0021】
図1(b)に示すように、磁石14の変位方向及びシフトレバー12の延びる方向の双方に直交する方向(Y軸方向)において互いに反対側に位置する2つの側面の中央付近には、それぞれ円柱状の軸15が突設されている。これら軸15には、磁石14の変位方向(X軸方向)から見てコの字状をなす支持部材16が装着されている。この支持部材16は、互いに対向する2つの支持壁16a及びこれら支持壁16aの上部間を連結する連結壁16bが合成樹脂材料により一体形成されてなる。
【0022】
図1(a)に併せて示されるように、両支持壁16aには、同図中の上方(Y軸方向)へ延びる長孔17がそれぞれ形成されている。これら長孔17には軸15が内側から挿入されている。支持部材16は軸15を中心として回転可能とされている。支持部材16の回転に伴い、軸15は長孔17に対して相対的にその内部を上下方向へ変位する。支持部材16の上面、すなわち連結壁16bの上面には、軸状のシフトレバー12が固定されている。シフトレバー12の軸15と反対側の先端部はレール13に形成された開口部13aを介して外部に突出している。
【0023】
したがって、シフトレバー12の左右方向への揺動は、軸15が支持部材16の長孔17内を変位することにより、磁石14の左右方向への直線運動に変換される。すなわち、シフトレバー12の傾動操作に連動して、磁石14は同図中の左右方向へスライド変位する。磁石14は、シフトレバー12の操作を通じて、当該シフトレバー12の操作方向と反対側へ変位する。シフト装置11に内蔵される位置検出装置は、シフトレバー12に連動して磁石14が直線状にスライド変位することを利用して、当該シフトレバー12の操作位置を検出する。この検出されるシフトレバー12の操作位置に応じて自動変速機の接続状態が切り換えられる。
【0024】
なお、本例では、シフトレバー12の操作位置として、駐車位置(P)、後進位置(R)、中立位置(N)、前進位置(D)及び回生ブレーキ位置(B)が設定されるところ、これら操作位置は直線状に配置される。シフトレバー12の各操作位置間の傾動量(操作角度)は、駐車位置(P)及び後進位置(R)間の操作量を除き、同一とされている。具体的には、後進位置(R)及び中立位置(N)間、中立位置(N)及び前進位置(D)間、並びに前進位置(D)及び回生ブレーキ位置(B)間の操作量はすべて同じ値、且つ、駐車位置(P)及び後進位置(R)間の操作量よりも小さな値とされている。そしてシフトレバー12の各操作位置と、磁石14の位置とは一対一で対応する。また、シフト装置11は、シフトレバー12の操作位置が保持される保持型(ステーショナリタイプ)、あるいは当該操作位置が特定の基準位置に自動復帰する復帰型(モーメンタリタイプ)のいずれのタイプとして構成してもよい。
【0025】
<位置検出装置>
次に、シフトレバー12の操作位置を検出する位置検出装置について説明する。図2に示すように、位置検出装置21は、前述した磁石14と、当該磁石14から発せられる磁界を検出する複数個の磁気センサ22とを備えてなる。各磁気センサ22は、磁石14の軸15が形成された2つの側面のいずれか一方に対向して配設される基板23に設けられている。各磁気センサ22の基板23に対する配置パターン及び磁石14に対する相対的な位置関係については後に詳述する。
【0026】
<磁石>
図3示すように、磁石14は、半円柱状の第1の磁極部31、直方体状の第2の磁極部32、これらの間に介在される直方体状の未着磁部33を備えてなる。第1の磁極部31及び未着磁部33、並びに未着磁部33及び第2の磁極部32は、相互に接合されてなる。未着磁部33は、強磁性体等の磁石素材により直方体状に形成されている。第1の磁極部31は、軸15の延びる方向(Y軸方向)においてS極とN極とが2極着磁されている。第2の磁極部32は、軸15の延びる方向に直交する方向、すなわち磁石14の変位方向(X軸方向)において多極着磁されている。本例では、第1〜第5の磁極32a,32b,32c,32d,32eが設けられている。第1〜第5の磁極32a〜32eの図3における上側の部位の極性は、この順にN極、S極、N極、S極、N極とされており、同じく下側の部位の極性は前述した上側の部位と反対の極性とされている(図6参照)。第2の磁極部32において、第1〜第5の磁極32a〜32eの磁石14の変位方向における着磁幅W1〜W5は次のように設定されている。
【0027】
・W1=W5<W2=W3=W4
すなわち、第2の磁極部32において磁石14の変位方向における両端に位置する第1及び第5の磁極32a,32eの着磁幅W1,W5は同じ値に設定されている。また、第2の磁極部32において第1及び第5の磁極32a,32e間に挟まれる第2〜第4の磁極32b〜32dの着磁幅W2,W3,W4は、第1及び第5の磁極32a,32eの着磁幅W1,W5よりも大きな同じ値に設定されている。本例では、第2〜第4の磁極32b〜32dの着磁幅W2〜W4は、次の関係式に示されるように、第1及び第5の磁極32a,32eの着磁幅W1,W5の2倍の値に設定されている。なお、次の関係式において「/」は除算を示す。
【0028】
・W1=W5=W2/2=W3/2=W4/2
<磁気センサ>
次に、各磁気センサ22、並びにこれらの基板23に対する配置パターン及び磁石14に対する相対的な位置関係について説明する。
【0029】
図4に示すように、基板23には第1〜第7の磁気センサ22a〜22gが設けられている。具体的には、第1、第2及び第6の磁気センサ22a,22b,22f、並びに、第3及び第5の磁気センサ22c,22eは、基板23の磁石14に対向する側面に設けられている。また、図5に併せて示されるように、第4及び第7の磁気センサ22d,22gは、基板23の磁石14と反対側の側面に設けられている。
【0030】
図4に示されるように、第1、第2及び第6の磁気センサ22a,22b,22f、並びに第4及び第7の磁気センサ22d,22gは、磁石14の第1の磁極部31(正確には、その移動軌跡)に対応するように設けられている。第1及び第2の磁気センサ22a,22bは、磁石14の変位方向(X軸方向)において、第6の磁気センサ22fを間に挟むかたちで設けられている。そして、基板23の表裏において、第4の磁気センサ22dは第2の磁気センサ22bに、第7の磁気センサ22gは第1の磁気センサ22aにそれぞれ一致するように設けられている。なお、図4では、説明の便宜上、第4及び第7の磁気センサ22d,22gは、第2及び第1の磁気センサ22b,22aに対して若干ずらして示す。したがって、第1、第2及び第6の磁気センサ22a,22b,22f、並びに第4及び第7の磁気センサ22d,22gには、図4に矢印B1で示されるように、第1の磁極部31から発せられる放射状の磁界が印加される。シフトレバー12の操作に連動する磁石14のX軸方向への変位に伴い、第1、第2及び第6の磁気センサ22a,22b,22f、並びに第4及び第7の磁気センサ22d,22gに印加される磁界の方向は変化する。
【0031】
なお、図4は、シフトレバー12が中立位置(N)に操作されたときの磁石14と各磁気センサ22との相対的な位置関係を示す。また、シフトレバー12の各操作位置に対応する磁石14の位置は、当該磁石14を軸15側から見たときに当該磁石14の変位方向に対して直交する方向へ延びる中心軸Oの位置を示す。この磁石14と各磁気センサ22との相対的な位置関係については、後に詳述する。
【0032】
第6の磁気センサ22f、並びに第3及び第5の磁気センサ22c,22eは、磁石14の変位方向(X軸方向)に対して直交する方向(Z軸方向)において一列に配設されている。また、第3及び第5の磁気センサ22c,22eは、磁石14の第2の磁極部32(正確には、その移動軌跡)に対応するように設けられている。したがって、第3及び第5の磁気センサ22c,22eには、図6に矢印B2で示されるように、第2の磁極部32から発せられるN極からS極へ向かう磁界が、当該第3及び第5の磁気センサ22c,22eの感磁面(図6中の上面)に対して垂直に印加される。
【0033】
<MRセンサ>
第1、第2、第4、第6及び第7の磁気センサ22a,22b,22d,22f,22gとしては、図7(a),(b)に示されるように、4つの磁気抵抗(MRE)がブリッジ状に接続されてなるいわゆるフルブリッジ型のMRセンサが採用されている。このMRセンサは、各磁気抵抗のブリッジ回路及びその信号処理回路が単一のICチップとして集積回路化されてなる。磁気抵抗の抵抗値は、与えられる磁界(正確には、磁束の向き)に応じて変化する。
【0034】
各MRセンサは、前述したブリッジ状の回路の中点電位(アナログ信号)+Vout,−Voutを、前記信号処理回路を構成するコンパレータを通じて、「1(ハイ)」又は「0(ロー)」の二値信号とする。すなわち、各MRセンサは、磁石14のスライド変位に伴う磁界(磁束)の方向の変化に応じて、「1(ハイ)」又は「0(ロー)」の二値信号を生成する。
【0035】
図7(a)に示されるように、第1、第6及び第7の磁気センサ22a,22f,22gは、これらに付与される磁界の方向が磁石14の変位方向(X軸方向)に対して−45度(+135度)の角度をなす時に最大値を、同じく+45度(+225度)の角度をなす時に最小値をとる正弦波状のアナログ信号を生成する。すなわち、第1、第6及び第7の磁気センサ22a,22f,22gは、これらに対して矢印A1で示される方向に沿う磁界が印加された場合には「1(ハイ)」、同じく当該矢印A1に直交する矢印A2で示される方向に沿う磁界が印加された場合には「0(ロー)」を二値信号として生成する。
【0036】
ここで、図7(c)の表に示されるように、第1、第6及び第7の磁気センサ22a,22f,22gの磁石14に対する配置角度を0°とした場合、第2及び第4の磁気センサ22b,22dの磁石14に対する配置角度は90°とされている。このため、図7(b)に示されるように、第2及び第4の磁気センサ22b,22dは、これらに付与される磁界の方向が磁石14の変位方向(X軸方向)に対して−45度(+135度)の角度をなす時に最小値を、同じく+45度(+225度)の角度をなす時に最大値をとる正弦波状のアナログ信号を生成する。すなわち、第2及び第4の磁気センサ22b,22dは、これらに対して矢印A1で示される方向に沿う磁界が印加された場合には「0(ロー)」、同じく当該矢印A1に直交する矢印A2で示される方向に沿う磁界が印加された場合には「1(ハイ)」を二値信号として生成する。
【0037】
<ホールセンサ>
第3及び第5の磁気センサ22c,22eとしては、ホール素子を使用したホールセンサが採用されている。本例では、S極のみ、あるいはN極のみの磁界を検出する、いわゆる単極検出タイプのものが採用されている。具体的には、本例で採用されるホールセンサは、図8(a)に示されるようにS極の磁界が印加された場合には「1(ハイ)」を、図8(b)に示されるようにN極の磁界が印加された場合には「0(ロー)」を二値信号として生成する。
【0038】
<磁気センサの出力態様>
次に、シフトレバー12が各操作位置に操作されたときの各磁気センサ22の出力態様について説明する。
【0039】
磁石14は、図9(a)の上部に四角枠で囲って示されるシフトレバー12の各操作位置(P,R,N,D,B)に対応する位置間を変位する。なお、図9(a)では、磁石14の位置は、当該磁石14を軸15側から見たときに当該磁石14の変位方向(X軸方向)に対して直交する方向(Z軸方向)へ延びる中心軸Oの位置を示す。また図9(a)では、磁石14を各磁気センサ22の反対側から見た状態を示す。さらに図9(a)では、磁石14の各磁気センサ22に対向する側の極性をかっこ書きで示す。
【0040】
例えば、シフトレバー12が中立位置(N)に操作されたとき、磁石14は、図9(a)に示されるように、第2の磁極部32の第3の磁極32cが、第3及び第5の磁気センサ22c,22eに対応する位置をとる。換言すれば、磁石14を軸15側から見たとき、当該磁石14の変位方向に対して直交する方向へ延びる中心軸Oが、第3、第5及び第6の磁気センサ22c,22e,22fを通る位置に、磁石14は位置する。
【0041】
そして、シフトレバー12が駐車位置(P)から回生ブレーキ位置(B)までの間において操作されたとき、各磁気センサ22の出力態様は次のようになる。
すなわち、図9(b)に示されるように、第1の磁気センサ22aは、磁石14が駐車位置(P)に対応する位置から中立位置(N)に対応する位置までの間にあるときにはローレベルの信号「論理0」を、中立位置(N)に対応する位置から回生ブレーキ位置(B)に対応する位置までの間にあるときにはハイレベルの信号「論理1」を生成する。これは、第1の磁気センサ22aとして、MRセンサが採用されているからである。すなわち、MRセンサは、磁石14がスライド変位した場合であれ、先の図7(a),(b)に矢印A1,A2で示される特定方向への磁界が印加される限り、当該磁界の方向に応じてハイレベルあるいはローレベルの信号を生成する。
【0042】
第2の磁気センサ22bは、磁石14が駐車位置(P)に対応する位置から中立位置(N)に対応する位置までの間にあるときにはハイレベルの信号「論理1」を、中立位置(N)に対応する位置から回生ブレーキ位置(B)に対応する位置までの間にあるときにはローレベルの信号「論理1」を生成する。なお、第4の磁気センサ22dも同様である。
【0043】
第3の磁気センサ22cは、磁石14が駐車位置(P)に対応する位置→後進位置(R)に対応する位置→中立位置(N)に対応する位置→前進位置(D)に対応する位置→回生ブレーキ位置(B)に対応する位置へ変位するたびに、ハイレベルの信号とローレベルの信号とを交互に生成する。これは、第3の磁気センサ22cとして、単極検出タイプのホールセンサが採用されているからである。すなわち、磁石14のスライド変位に伴い、第3の磁気センサ22cに対応する磁石14(正確には、第2の磁極部32)の極性がS極とN極との間で交互に切り替わる。このため、磁石14のスライド変位に伴い、第3の磁気センサ22cは、ハイレベルの信号とローレベルの信号とを交互に生成する。なお、第5の磁気センサ22eも同様である。
【0044】
第6の磁気センサ22fは、磁石14が駐車位置(P)及び回生ブレーキ位置(B)に対応する位置にあるときにはそれぞれローレベルの信号「論理0」を、後進位置(R)から前進位置(D)に対応する位置までの間にあるときにはハイレベルの信号「論理1」を生成する。
【0045】
第7の磁気センサ22gは、磁石14が駐車位置(P)及び後進位置(R)に対応する位置にあるときにはそれぞれローレベルの信号「論理0」を、中立位置(N)に対応する位置から回生ブレーキ位置(B)に対応する位置までの間にあるときにはハイレベルの信号「論理1」を生成する。
【0046】
このように本例では、シフトレバー12が各操作位置に操作された場合に各磁気センサ22において生成される二値信号(出力論理)の組合せがすべて異なるように、磁石14の着磁パターン、及び当該磁石14に対する各磁気センサ22の相対的な位置関係が設定される。すなわち、シフトレバー12の操作に連動する磁石14の位置に応じて第1〜第7の磁気センサ22a〜22gにおいて生成される二値信号の組合せに基づきシフトレバー12の操作位置を特定可能となる。
【0047】
図10に示すように、シフト装置11のマイクロコンピュータ41は、第1〜第7の磁気センサ22a〜22gから供給される二値信号の組合せに基づきシフトレバー12の操作位置を認識し、この認識されるシフトレバー12の操作位置に応じて自動変速機42に対する変速指令信号Scを生成する。自動変速機42は、当該変速指令信号Scを受けて内部の動力伝達経路の接続状態の切り替えを行う。
【0048】
<ハミング符号>
本例では、シフトレバー12が各操作位置に操作された場合に、各磁気センサ22において生成される二値信号の組合せがハミング符号に準拠するように、磁石14の着磁パターン及び当該磁石14に対する各磁気センサ22の相対的な位置関係が調節されている。シフトレバー12の各操作位置と、各磁気センサ22から供給される二値信号との組合せは、例えば図11の一覧表に示されるようになる。同図において、各行はシフトレバー12の操作位置(P,R,N,D,B)を、各列は第1〜第7の磁気センサ22a〜22gを示す。同図に示される「1」及び「0」の二値信号(論理レベル)は、先の図9(b)に示される各磁気センサ22の出力電圧レベルに対応している。すなわち、ハイレベルの信号(H)は論理レベル「1」、ローレベルの信号(L)は論理レベル「0」に対応する。
【0049】
同図に示されるように、シフトレバー12が駐車位置(P)に操作された場合、各二値信号の組合せは、「0111100」となる。シフトレバー12が駐車位置(R)に操作された場合、各二値信号の組合せは、「0101010」となる。シフトレバー12が駐車位置(N)に操作された場合、各二値信号の組合せは、「1111111」となる。シフトレバー12が駐車位置(D)に操作された場合、各二値信号の組合せは、「1000011」となる。シフトレバー12が駐車位置(B)に操作された場合、各二値信号の組合せは、「1010101」となる。
【0050】
ここで、ハミング符号とは、データ通信の際に通信路で生ずる符号誤りを訂正し通信の信頼性を高めるための誤り訂正符号のひとつである。本例では、このハミング符号を用いることにより、各二値信号の組み合わせにおける1つの誤りを検出して訂正することが可能となる。また、各二値信号の組み合わせにおける2つの誤りを検出することが可能となる。
【0051】
ハミング符号は、データビット(情報ビット)にチェックビット(冗長ビット)を付加したものである。データビットは、送信したい情報、すなわち本例ではシフトレバー12の操作位置(正確には、当該操作位置に対応する磁石14の位置)を示す情報を構成する。チェックビットは、誤りの検出及び訂正を行うためにデータビットに付加される情報である。本例では、第1〜第4の磁気センサ22a〜22dにおいて生成される二値信号がデータビットとされている。また、第5〜第7の磁気センサ22e〜22gにおいて生成される二値信号がチェックビットとされている。
【0052】
マイクロコンピュータ41は、各二値信号の組み合わせに基づいて、磁石14の各位置に対応する二値信号の組み合わせの1つの誤り信号に一対一で対応する誤り信号位置情報を生成する。そしてマイクロコンピュータ41は、当該誤り信号位置情報に基づいて、前記二値信号の組み合わせの誤り信号位置を特定し、この特定された誤り信号位置の二値信号を訂正する。
【0053】
前記自動変速機の接続状態を切り替えるに際して、マイクロコンピュータ41は、各磁気センサ22から供給される二値信号の組合せの誤りの有無を判定し、誤りがある旨判定される場合にはその誤りを訂正する。そして、マイクロコンピュータ41は、訂正した二値信号の組み合わせに基づきシフトレバー12の操作位置を認識する。
【0054】
<実施の形態の効果>
したがって、本実施の形態によれば、以下の効果を得ることができる。
(1)本例の位置検出装置21は、シフトレバー12の操作に連動して直線的に変位する磁石14を備える。この磁石14は、その変位方向に対して交わる方向に2極着磁された第1の磁極部31と、当該変位方向に沿って多極着磁された第2の磁極部32とを備えてなる。また、位置検出装置21は、第1の磁極部31に対して相対変位可能に設けられる複数個の磁界方向検出型の磁気センサ(22a,22b,22d,22f,22g)、および第2の磁極部32に対して相対変位可能に設けられる複数個の単極検出型の磁気センサ(22c,22e)も備えてなる。磁界方向検出型の磁気センサは、第1の磁極部31の変位に伴う磁界方向の変化を検出し、当該磁界方向に応じた二値信号を生成する。また、単極検出型の磁気センサは、S極及びN極のいずれか一方の磁界を検出し、当該極性に応じた二値信号を生成する。位置検出装置21のマイクロコンピュータ41は、各磁気センサにおける磁界の検出結果に応じて生成される二値信号の組合せに基づきシフトレバー12の操作位置を検出する。そして、本例では、各磁気センサにおいて生成される二値信号の組み合わせが、ハミング符号に準拠するため、1つの誤り訂正、あるいは2つの誤り検出が可能となる。これにより、磁石の位置に対応する操作部材の操作位置の検出に対する信頼性が確保可能となる。
【0055】
(2)また、第1及び第2の磁極部31,32の着磁パターンについても単純なものとなる。すなわち、第1の磁極部31は、その変位方向に対して交わる方向においてS極とN極との2極に着磁するだけでよい。第2の磁極部32は、その変位方向に沿ってN極とS極とを交互に着磁するだけでよい。このため、第1及び第2の磁極部31,32、すなわち磁石14の着磁パターンを含む構成の簡素化が図られる。
【0056】
(3)さらに、第1の磁極部31はその着磁方向から見たときに放射状をなす磁界を発するところ、この第1の磁極部31に対応して磁界方向検出型の各磁気センサ(22a,22b,22d,22f,22g)が集中して配設される。磁界方向検出型の磁気センサは、第1の磁極部31の直線変位に伴い変化する磁界方向に応じた二値信号を生成する。また、第2の磁極部32はその変位方向に多極着磁されるところ、この第2の磁極部32に対応して単極検出型の各磁気センサ(22c,22e)が集中して配設される。単極検出型の磁気センサは、自身に対応する磁極の極性に応じた二値信号を生成する。ちなみに、第2の磁極部32の直線変位に伴い単極検出型の磁気センサに対応する磁極の極性は、N極とS極との間で交互に切り替わる。このように、磁界の検出原理(センサ出力態様)が異なる2種類の磁気センサを組み合わせて使用することにより、より少ないセンサ数で操作部材の位置検出が可能となる。また、磁界方向検出型の各磁気センサは第1の磁極部31に、また単極検出型の各磁気センサは第2の磁極部32にそれぞれ対応して集中配置されることにより、位置検出装置21、ひいてはシフト装置11の体格の小型化が可能となる。
【0057】
(4)第1及び第2の磁極部31,32を有する磁石14は一体的に形成される。また、この磁石14において、第1及び第2の磁極部31,32の境界部分には磁石素材からなる磁化をもたない未着磁部33が設けられてなる。この構成によれば、第1及び第2の磁極部31,32を有する磁石14が一体的に形成されることにより、部品点数の低減化が図られる。また、第1及び第2の磁極部31,32間に、磁石素材からなる未着磁部33を設けることにより、第1の磁極部31から発せられる放射状磁界が第2の磁極部32側へ広がることが抑制される。これは、第1の磁極部31から第2の磁極部32側へ向かう磁界は未着磁部33の内部に閉じ込められるからである。第1及び第2の磁極部31,32からそれぞれ発せられる磁界が相互に干渉し合うことが抑制されることにより、磁界方向検出型及び単極検出型の各磁気センサの検出結果に対する信頼性が確保される。また、第1及び第2の磁極部31,32間に未着磁部33を設けることにより、第1の磁極部31と第2の磁極部32との近接配置も可能となり、ひいては位置検出装置21のいっそうの小型化が可能となる。
【0058】
(5)第1の磁極部31は半円柱状をなして、また第2の磁極部32はその変位方向へ延びる直方体状をなして形成され、第1の磁極部31の平坦面と第2の磁極部32の長側面とが一体的に接合されてなる。この構成によれば、第1の磁極部31が半円柱状に形成されることにより、放射状磁界が好適に形成される。また、第2の磁極部32はその変位方向へ延びる直方体状に形成するだけでよいので、構成の簡素化が図られる。また、形成も容易である。
【0059】
(6)1つの磁気センサの故障を検出して訂正可能とした非接触式のシフト装置11を構築可能となる。このため、シフトレバー12の操作位置の検出に対する信頼性を確保することができる。また、前述したように、位置検出装置21の構成の簡素化及び体格の小型化が図られることにより、シフト装置11全体の構成の簡素化及び体格の小型化も図られる。
【0060】
(7)磁界方向検出型の各磁気センサは、第1の磁極部31に対応して設けられる基板23の表裏両面に分散して配設されてなる。この構成によれば、磁気センサをより狭い領域に集中して設けることが可能となるので、位置検出装置21、ひいてはシフト装置11のいっそうの小型化が図られる。
【0061】
(8)磁界方向検出型の磁気センサとして、磁気抵抗効果を利用したMRセンサを採用した。このMRセンサは、その配置角度を変えることにより、同方向の磁界に対して異なる出力が得られる。このため、配置角度の異なる複数個のMRセンサを組み合わせることにより、それらのセンサ出力(二値信号)の組合せにバリエーションを容易に持たせることができる。また、集中配置にも好適である。
【0062】
<他の実施の形態>
なお、前記実施の形態は、次のように変更して実施してもよい。
・本例では、磁石14に2つの軸15を設けたが、単一の軸15を設けるのみとしてもよい。この場合であれ、磁石14は、レール13に沿って安定してスライド変位する。また、この場合には、磁石14の軸15と反対側の側面に基板23を配設することが好ましい。軸15と基板23との干渉の有無等を考慮する必要がなくなるからである。
【0063】
・各二値化信号において、1つもしくは2つの誤りを検知した場合、マイクロコンピュータ41は、例えば車室内に設けられるインジケータランプ等の報知装置を通じて、その旨報知するようにしてもよい。また、マイクロコンピュータ41は、各二値化信号の組み合わせの誤りを訂正不能と判断した場合、自動変速機42の接続状態をニュートラルに切り替える旨指令する変速指令信号Scを生成するようにしてもよい。
【0064】
・第3及び第5の磁気センサ22c,22eを基板23の表裏において互いに一致するように設けてもよい。
・本例では、シフトレバー12の操作位置に応じた変速指令信号Scを生成するようにしたが、単にシフトレバー12の操作位置を示す信号を生成するようにしてもよい。この場合には、自動変速機42側の電子制御装置は、シフト装置11のマイクロコンピュータ41から供給される信号に基づきシフトレバー12の操作位置を判定し、この判定される操作位置に応じて自動変速機42の動力伝達経路の切り換え制御を実行する。
【0065】
・本例では、MRセンサとして、いわゆるフルブリッジ側のMRセンサを採用したが、例えば2つの磁気抵抗が直列に接続されてなるいわゆるハーフブリッジ型のMRセンサを採用してもよい。
【0066】
・各磁気センサ22において生成される二値信号の組合せは、図11の一覧表に示されるものに限られない。磁石14の着磁パターン及び各磁気センサ22の磁石14に対する相対的な位置関係の調節を通じて、異なる組合せとすることも可能である。
【0067】
・シフト装置11に限らず、ジョイスティック型の入力装置等にも適用可能である。また、シフトレバー等の軸状の部材の操作位置を検出するものに限られず、例えば特定の方向へスライド操作する摘みの操作位置を検出するようにしてもよい。この場合には、摘みは磁石14と一体的に変位可能に設ける。
【0068】
・未着磁部33は省略してもよい。このようにしても、第1の磁極部31では磁石14の移動軌跡に沿う仮想平面に対して平行をなす放射状の磁界が形成され、第2の磁極部32では磁石14の移動軌跡に沿う仮想平面に対して直交する方向の磁界が形成される。
【0069】
・本例では、第1の磁極部31、第2の磁極部32、及び未着磁部33を一体的に形成したが、これらを別部材として構成することも可能である。この場合には、これら部材を単一の樹脂ケースに収容して一体化する。軸15は当該樹脂ケースに設ける。
【0070】
<他の技術的思想>
次に、前記実施の形態から把握できる技術的思想を以下に追記する。
・請求項1〜請求項3のうちいずれか一項に記載の位置検出装置において、前記磁界方向検出型の磁気センサとして磁気抵抗効果を利用したMRセンサが、前記単極検出型の磁気センサとしてホール効果を利用したホールセンサが採用されてなる位置検出装置。
【0071】
・請求項1〜請求項3のうちいずれか一項に記載の位置検出装置において、前記磁界方向検出型の各磁気センサは、前記第1の磁石に対応して設けられる基板の表裏両面に分散して配設されてなる位置検出装置。
【0072】
この構成によれば、磁気センサをより狭い領域に集中して設けることが可能となるので、位置検出装置のいっそうの小型化が図られる。
【符号の説明】
【0073】
11…シフト装置、12…シフトレバー(操作部材)、14…磁石、21…位置検出装置、22…磁気センサ、22a,22b,22d,22f,22g…磁界方向検出型の磁気センサ(MRセンサ)、22c,22e…単極検出型の磁気センサ(ホールセンサ)、31…第1の磁極部(第1の磁石)、32…第2の磁極部(第2の磁石)、33…未着磁部、41…マイクロコンピュータ(制御装置)、42…自動変速機、W1〜W5…着磁幅。
【特許請求の範囲】
【請求項1】
操作部材の操作に連動して直線的に変位するとともに、当該変位方向に対して交わる方向に2極着磁された第1の磁石と、
前記第1の磁石と一体的に直線変位するとともに、当該変位方向に沿って多極着磁された第2の磁石と、
前記第1の磁石に対して相対変位可能に設けられるとともに、当該第1の磁石の変位に伴う磁界方向の変化を検出する複数個の磁界方向検出型の磁気センサと、
前記第2の磁石に対して相対変位可能に設けられるとともに、S極及びN極のいずれか一方の磁界を検出する複数個の単極検出型の磁気センサと、
前記各磁気センサにおける磁界の検出結果に応じて生成される二値信号の組合せに基づき操作部材の操作位置を検出する制御装置と、を備え、
前記二値信号の組み合わせが、前記操作部材に連動する磁石の位置情報を構成するデータビットと、前記二値信号の組み合わせにおける1つの二値信号の誤りを訂正するためのチェックビットとを含むハミング符号に準拠したものとなるように、前記第1の磁石に対する前記磁界方向検出型の磁気センサの相対位置関係、及び前記第2の磁石の変位方向における各磁極の着磁幅が設定されてなる位置検出装置。
【請求項2】
請求項1に記載の位置検出装置において、
前記第1及び第2の磁石は一体的に形成されるとともに、これら磁極部の境界部分には磁石素材からなる磁化をもたない未着磁部が設けられてなる位置検出装置。
【請求項3】
請求項1又は請求項2に記載の位置検出装置において、
前記第1の磁石は半円柱状をなして、また前記第2の磁石はその変位方向へ延びる直方体状をなして形成され、前記第1の磁石の平坦面と前記第2の磁石の長側面とが一体的に接合されてなる位置検出装置。
【請求項4】
直線状に配置して設定される複数の操作位置間を変位する操作部材と、当該操作部材の操作位置を検出する位置検出装置とを備え、当該位置検出装置の検出結果に基づき車両の変速機の接続状態を切り替えるシフト装置において、
前記位置検出装置として、請求項1〜3のうちいずれか一項に記載の位置検出装置が採用されてなるシフト装置。
【請求項1】
操作部材の操作に連動して直線的に変位するとともに、当該変位方向に対して交わる方向に2極着磁された第1の磁石と、
前記第1の磁石と一体的に直線変位するとともに、当該変位方向に沿って多極着磁された第2の磁石と、
前記第1の磁石に対して相対変位可能に設けられるとともに、当該第1の磁石の変位に伴う磁界方向の変化を検出する複数個の磁界方向検出型の磁気センサと、
前記第2の磁石に対して相対変位可能に設けられるとともに、S極及びN極のいずれか一方の磁界を検出する複数個の単極検出型の磁気センサと、
前記各磁気センサにおける磁界の検出結果に応じて生成される二値信号の組合せに基づき操作部材の操作位置を検出する制御装置と、を備え、
前記二値信号の組み合わせが、前記操作部材に連動する磁石の位置情報を構成するデータビットと、前記二値信号の組み合わせにおける1つの二値信号の誤りを訂正するためのチェックビットとを含むハミング符号に準拠したものとなるように、前記第1の磁石に対する前記磁界方向検出型の磁気センサの相対位置関係、及び前記第2の磁石の変位方向における各磁極の着磁幅が設定されてなる位置検出装置。
【請求項2】
請求項1に記載の位置検出装置において、
前記第1及び第2の磁石は一体的に形成されるとともに、これら磁極部の境界部分には磁石素材からなる磁化をもたない未着磁部が設けられてなる位置検出装置。
【請求項3】
請求項1又は請求項2に記載の位置検出装置において、
前記第1の磁石は半円柱状をなして、また前記第2の磁石はその変位方向へ延びる直方体状をなして形成され、前記第1の磁石の平坦面と前記第2の磁石の長側面とが一体的に接合されてなる位置検出装置。
【請求項4】
直線状に配置して設定される複数の操作位置間を変位する操作部材と、当該操作部材の操作位置を検出する位置検出装置とを備え、当該位置検出装置の検出結果に基づき車両の変速機の接続状態を切り替えるシフト装置において、
前記位置検出装置として、請求項1〜3のうちいずれか一項に記載の位置検出装置が採用されてなるシフト装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−13187(P2011−13187A)
【公開日】平成23年1月20日(2011.1.20)
【国際特許分類】
【出願番号】特願2009−159880(P2009−159880)
【出願日】平成21年7月6日(2009.7.6)
【出願人】(000003551)株式会社東海理化電機製作所 (3,198)
【Fターム(参考)】
【公開日】平成23年1月20日(2011.1.20)
【国際特許分類】
【出願日】平成21年7月6日(2009.7.6)
【出願人】(000003551)株式会社東海理化電機製作所 (3,198)
【Fターム(参考)】
[ Back to top ]