
位置検出装置及び撮像装置
【課題】誘導磁気の影響を抑えて高精度に位置を検出する。
【解決手段】本発明に係る位置検出ユニット100は、磁気コイル106cを有し、磁力により駆動力を発生させるボイスコイルモータ106と、ボイスコイルモータ106により駆動されるレンズ移動枠102と、レンズ移動枠102の位置を検出するMRセンサ110と、磁気コイル106cに流れる電流に基づいて、MRセンサ110の出力を補正する補正部(検出アンプ122、減算部126)と、を備える。
【解決手段】本発明に係る位置検出ユニット100は、磁気コイル106cを有し、磁力により駆動力を発生させるボイスコイルモータ106と、ボイスコイルモータ106により駆動されるレンズ移動枠102と、レンズ移動枠102の位置を検出するMRセンサ110と、磁気コイル106cに流れる電流に基づいて、MRセンサ110の出力を補正する補正部(検出アンプ122、減算部126)と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置検出装置及び撮像装置に関する。
【背景技術】
【0002】
近時においては、デジタルカメラ等の撮像装置において、光学レンズの位置を検出するためにMRセンサ等の位置検出装置が用いる技術が知られている。例えば、下記の特許文献1には、MRセンサからの出力が変動した場合にも、ゲインやオフセットを調整することで、MRセンサの出力を一定にすることを想定した技術が記載されている。また、下記の特許文献2には、MRセンサのオフセット電圧の調整部を無くし、増幅器のダイナミックレンジを最大限に利用可能とすることを想定した技術が記載されている。
提供する
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−356733号公報
【特許文献2】特開平6−313718号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、撮像装置においては、光学レンズを駆動するためにボイスコイルモータ等の磁力を用いたアクチュエータが通常用いられている。これらのアクチュエータは、誘導磁気を発生するため、誘導磁気がMRセンサの出力に影響を及ぼしてしまい、正確な位置検出が困難になるという問題が生じていた。
【0005】
誘導磁気の影響を抑えるためには、MRセンサにコイルの影響が生じないように、MRセンサとアクチュエータとの間の距離を十分に遠ざけて配置する必要がある。しかしながら、MRセンサとアクチュエータとの間の距離を十分に遠ざけると、装置の構成が大型化するとともに、各部品の剛性が低下することにより位置検出精度が低下してしまう。従って、レンズを所望の位置に駆動することができず、画質の劣化等の問題が生じてしまう。
【0006】
そこで、本発明は、上記問題に鑑みてなされたものであり、本発明の目的とするところは、誘導磁気の影響を抑えて高精度に位置を検出することが可能な、新規かつ改良された位置検出装置及び撮像装置を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のある観点によれば、磁気コイルを有し、磁力により駆動力を発生させるアクチュエータと、前記アクチュエータにより駆動される移動部と、前記移動部の位置を検出する磁気抵抗素子と、前記磁気コイルに流れる電流に基づいて、前記磁気抵抗素子の出力を補正する補正部と、を備える位置検出装置が提供される。
【0008】
上記構成によれば、磁気コイルに流れる電流に基づいて、磁気抵抗素子の出力が補正されるため、磁気コイルの誘導磁気によるノイズ成分が磁気抵抗素子の出力に含まれてしまうことを抑止できる。従って、移動部の位置を高精度に検出することが可能となる。
【0009】
前記補正部は、前記磁気コイルに流れる電流を検出するアンプと、前記アンプの出力を前記磁気抵抗素子の出力から減算する減算部と、を含む。この構成によれば、前記磁気コイルに流れる電流が検出されて、磁気抵抗素子の出力から減算されるため、磁気コイルの誘導磁気によるノイズ成分を過不足なくキャンセルすることが可能となる。
【0010】
前記補正部は、前記磁気コイルに流れる電流と、前記磁気抵抗素子の出力から求まる前記磁気抵抗素子と前記アクチュエータとの距離とに基づいて、前記磁気抵抗素子の出力を補正する。この構成によれば、磁気コイルの誘導磁気が磁気抵抗素子の出力に与えるノイズ成分は、磁気抵抗素子とアクチュエータとの距離に応じて変化するため、磁気抵抗素子の出力から求まる磁気抵抗素子と前記アクチュエータとの距離に基づいて、磁気抵抗素子の出力を補正することによって、磁気コイルの誘導磁気によるノイズ成分が磁気抵抗素子の出力に含まれてしまうことをより確実に抑えることができる。
【0011】
また、上記課題を解決するために、本発明の別の観点によれば、磁気コイルを有し、磁力により駆動力を発生させるアクチュエータと、光学レンズが装着され、前記アクチュエータにより駆動されるレンズ移動枠と、前記レンズ移動枠の位置を検出する磁気抵抗素子と、前記磁気コイルに流れる電流に基づいて、前記磁気抵抗素子の出力を補正する補正部と、を備える撮像装置が提供される。
【0012】
上記構成によれば、磁気コイルに流れる電流に基づいて、磁気抵抗素子の出力が補正されるため、磁気コイルの誘導磁気によるノイズ成分が磁気抵抗素子の出力に含まれてしまうことを抑止できる。従って、レンズ移動枠の位置を高精度に検出することが可能となる。
【0013】
前記補正部は、前記磁気コイルに流れる電流を検出するアンプと、前記アンプの出力を前記磁気抵抗素子の出力から減算する減算部と、を含む。この構成によれば、前記磁気コイルに流れる電流が検出されて、磁気抵抗素子の出力から減算されるため、磁気コイルの誘導磁気によるノイズ成分を過不足なくキャンセルすることが可能となる。
【0014】
前記補正部は、前記磁気コイルに流れる電流と、前記磁気抵抗素子の出力から求まる前記磁気抵抗素子と前記アクチュエータとの距離とに基づいて、前記磁気抵抗素子の出力を補正する。この構成によれば、磁気コイルの誘導磁気が磁気抵抗素子の出力に与えるノイズ成分は、磁気抵抗素子とアクチュエータとの距離に応じて変化するため、磁気抵抗素子の出力から求まる磁気抵抗素子と前記アクチュエータとの距離に基づいて、磁気抵抗素子の出力を補正することによって、磁気コイルの誘導磁気によるノイズ成分が磁気抵抗素子の出力に含まれてしまうことをより確実に抑えることができる。
【発明の効果】
【0015】
本発明によれば、誘導磁気の影響を抑えて高精度に位置を検出することが可能な位置検出装置及び撮像装置を提供することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施形態に係る撮像装置の構成を示す模式図である。
【図2】本実施形態に係る撮像装置において、光学レンズを光軸方向に移動させるためにボイスコイルモータ(VCM)を設けるとともに、MRセンサと検出用マグネットを搭載したユニットを示す模式図である。
【図3】検出用マグネットの表面に着磁されたN極、S極と、MRセンサとの位置関係を示す模式図である。
【図4】MRセンサの出力波形を示す模式図である。
【図5】MRセンサの出力にノイズ成分が混入した状態を示す特性図である。
【図6】本実施形態に係る位置検出装置の構成を示す模式図である。
【図7】MRセンサが受ける磁界の影響分を考慮していない従来の構成例を示す模式図である。
【図8】ボイスコイルモータの位置に応じて、減算器にて減算する値を変化させる構成を示す模式図である。
【図9】MRセンサとボイスコイルモータとを接近して配置した構成例を示す模式図である。
【発明を実施するための形態】
【0017】
以下に添付図面を参照しながら、本発明の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0018】
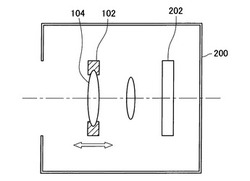
図1は、本発明の一実施形態に係る撮像装置200の構成を示す模式図である。図1に示すように、撮像装置200は、撮像素子202と、レンズ移動枠102とが筐体内に配置されて構成される。レンズ移動枠102には、被写体像を撮像素子202の撮像面に結像させる光学レンズ(フォーカスレンズ)104が設けられている。撮像装置200は、被写体の位置に応じてレンズ移動枠102及び光学レンズ104を光軸方向に移動することで、被写体像を撮像素子202の撮像面に合焦させる。
【0019】
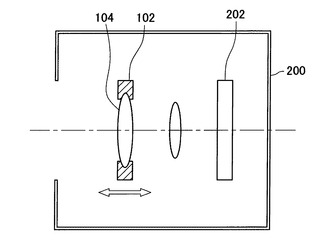
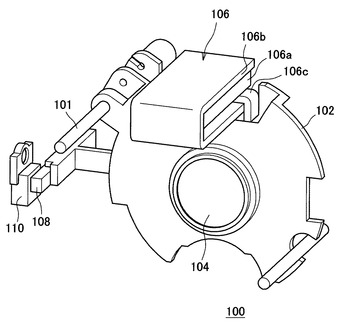
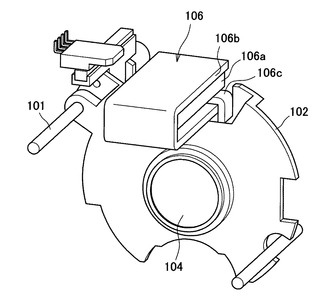
図2は、本実施形態に係る撮像装置200において、光学レンズ104を光軸方向に移動させるためにボイスコイルモータ(VCM)106を設けるとともに、MRセンサ(磁気抵抗素子)110と検出用マグネット108を搭載した位置検出ユニット100を示す模式図である。図2に示すユニット100は、シャフト101、レンズ移動枠102、レンズ104、ボイスコイルモータ106、検出用マグネット108、MRセンサ110を有して構成される。なお、ここではボイスコイルモータ106がフォーカスレンズを移動させる構成を例示するが、ボイスコイルモータ106はズーム光学系を移動させるものであってもよい。
【0020】
レンズ移動枠102にはシャフト101が貫通しており、レンズ移動枠102は、シャフト101の軸方向にスライド可能とされている。ボイスコイルモータ106は、マグネット106a、鉄板106b、及びコイル106cから構成されている。ボイスコイルモータ106のコイル106cはレンズ移動枠102に固定されている。一方、ボイスコイルモータ106の鉄板106bとマグネット106aは、撮像装置200の筐体側に固定されている。ボイスコイルモータ106のコイル106cに電流を流した際、磁界により発生する力によってコイル106cが移動する。これにより、レンズ移動枠102が、コイル106cとともにシャフト101に沿って移動する。
【0021】
また、検出用マグネット108は、レンズ移動枠102に固定されている。検出用マグネット108は、レンズ移動枠102の移動方向に沿って延在しており、その表面にはN極、S極が所定のピッチλで着磁されているMRセンサ110は、そのセンサ面が検出用マグネット108の表面と対向し、センサ面とマグネット108の表面との間に所定の間隔(ギャップ)をおいた状態で撮像装置の固定部材に固定されている。
【0022】
レンズ移動枠102が移動すると、固定されているMRセンサ110に対して検出用マグネット108が移動し、MRセンサ110のセンサ面に対して検出用マグネット108のN極、S極が横切り、MRセンサ110から所定の信号が出力されることになる。
【0023】
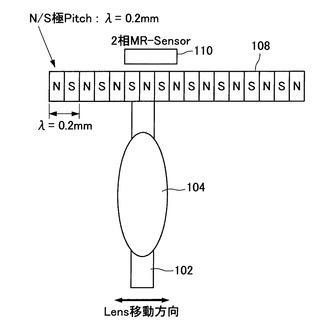
図3は、検出用マグネット108の表面に着磁されたN極、S極と、MRセンサ110との位置関係を示す模式図である。MRセンサ110の表面にはN極、S極が所定のピッチλで着磁されている。本実施形態において、ピッチλは一例として0.2mmである。
【0024】
図4は、MRセンサ110の出力波形を示す模式図である。図4に示すように、MRセンサ110は、その近傍に平行に配置された検出用マグネット108がレンズ移動枠102とともに移動したときに、検出用マグネット108に着磁されているN極とS極がセンサ面を横切ることよって、N極とS極のピッチに応じたサイン(sin)波の信号を出力する。
【0025】
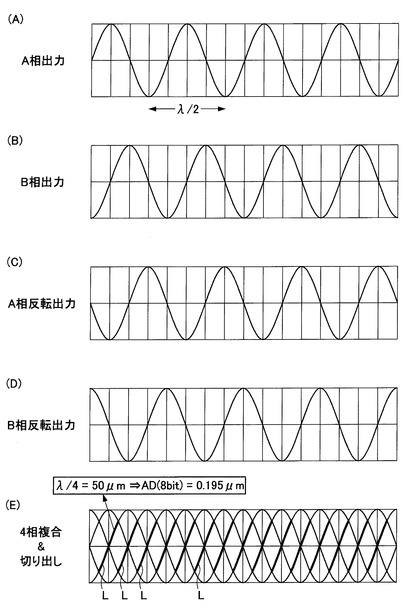
図4(A)、図4(B)に示すように、MRセンサ110からは、移動時の分解能を向上させるために90°位相がずれた2つの信号(A相出力とB相出力)が出力される。また、A相出力からA相反転出力が生成され(図4(C))、B相出力からB相反転出力が生成される(図4(D))。そして、図4(E)に示すように、A相出力、B相出力、A相反転出力、B相反転出力を合成し、波形の交点の間の直線部分L(太線で示す)を切り出して繋げることで、連続した位置信号を得ることができる。図4の例では、1つの直線部分Lが50μmに相当し、直線部分Lを更に分割することで位置検出精度をより高めることが可能である。
【0026】
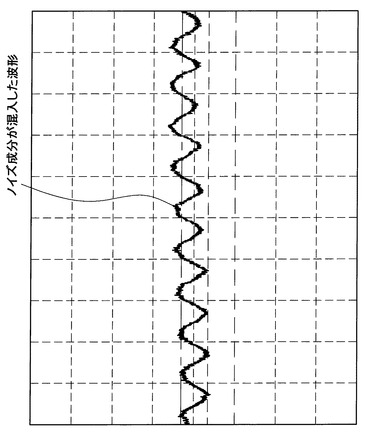
漏れ磁界の影響はMRセンサ110の出力レベルの低下につながるため、必要な出力レベルが確保できるように、漏れ磁界の影響を考慮してMRセンサ110、検出用マグネット108及びボイスコイルモータ106が配置される。しかし、レンズ移動枠102の移動時には、ボイスコイルモータ106のコイル106cに電流を流すことで発生する誘導磁界がMRセンサ110の出力に影響を与えてしまう。この誘導磁界は、レンズ移動枠102を移動させる度に発生し、さらに制御上、不規則且つ、予測できない量となり、MRセンサ110の出力にそのままノイズ成分として混入することになる。図5は、レンズ移動枠102の移動時にボイスコイルモータ106のコイル106cに電流を流すことで発生する誘導磁界がMRセンサ110の出力に影響を与えた状態を示す特性図である。図5は、図2の構成からマグネット106aを取り外し、この状態でボイスコイルモータ106のコイル106cに電流を流した場合に、MRセンサ110の出力にノイズ成分が混入した状態を示している。マグネット106aを取り外した状態では、本来は、MRセンサ110の出力は0のまま変化しないが、誘導磁界によって図5に示すようなノイズ波形が生じてしまう。
【0027】
図5は、ボイスコイルモータ106に規定の交流電流(±200mA,1kHz)を流したときに発生する誘導磁界の影響をMRセンサ110の出力(A相出力)で観察した波形を示している。このノイズは、レンズ移動枠102の移動方向に換算すると、0.5μm程度の誤差となる。図4の例では、1つの直線部分Lが50μmに相当し、直線部分L分割することでサブミクロンを検知する高分解能にすることが可能であるため、0.5μm程度の誤差が発生した場合、本来の高精度な位置検出精度を確保することは困難である。このように、誘導磁界によってMRセンサ110の出力にノイズが混入することで、MRセンサ110による位置検出精度が低下してしまう。このため、従来では、コイル106cの影響がない位置まで、または必要精度を確保できるノイズレベルまで、MRセンサ110とボイスコイルモータ106のマグネット106a及びコイル106cとの距離を遠ざけて配置することで誘導磁界の影響を避けていたが、この場合、必要なスペースが増大して装置が大型化してしまう。
【0028】
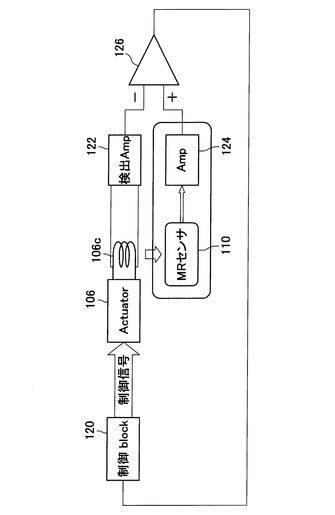
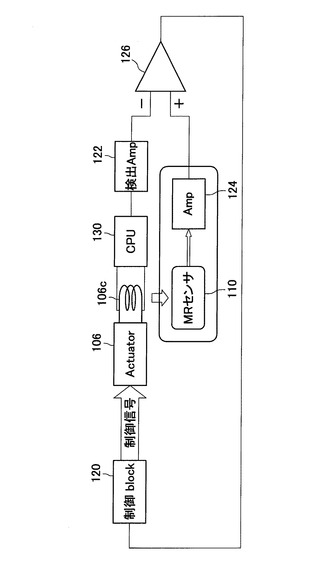
このため、本実施形態では、ボイスコイルモータ106による誘導磁気の影響を検出して、これに基づいてMRセンサ110の出力を補正するようにしている。図6は、本実施形態に係る位置検出装置の構成を示す模式図である。図6に示すように、本システムは、ボイスコイルモータ106、制御ブロック120、アンプ122、MRセンサ110、アンプ124、減算器126、を有して構成される。
【0029】
図6において、制御ブロック120は、ボイスコイルモータ106の駆動を制御する。検出アンプ122は、ボイスコイルモータ106のコイル106cに流れる電流量を取得する。アンプ124は、MRセンサ110の出力を増幅する。また、MRセンサ110とアンプ124を含むブロックには、MRセンサ110の出力の振幅をオフセットする機能を持たせても良い。
【0030】
ボイスコイルモータ106のコイル106cに印加される電流量と発生する磁界の量は比例していることから、検出アンプ122は、MRセンサ110にて受ける磁界の影響分をキャンセルするため、コイル106cに流れる電流量を所定の係数倍に増幅し、減算器126は、アンプ124の出力から検出アンプ122の出力を減算する。検出アンプ122及び減算器126は、MRセンサ110の出力を補正する補正部として機能する。これにより、図5で説明したノイズ成分をキャンセルすることができ、正確な位置情報を制御ブロック120へ伝達することができる。
【0031】
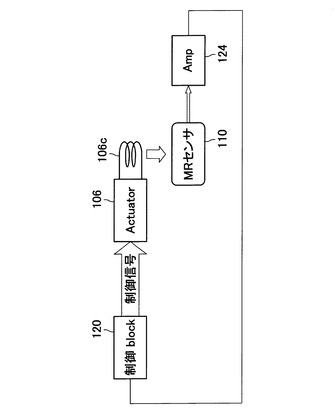
図7は、比較のため、MRセンサ110が受ける磁界の影響分を考慮していない従来の構成例を示している。図2に示すように、MRセンサ110と検出用マグネット108は、ボイスコイルモータ106から適当な距離を置いている。これは、ボイスコイルモータ106の漏れ磁界の影響を避けるためであるが、ボイスコイルモータ106のマグネット106aとMRセンサ110はともに筐体側に固定されているため、MRセンサ110は漏れ磁界を静的な影響として受ける。更に、レンズ移動枠102の移動時には、ボイスコイルモータ106のコイル106cに電流を流すことで発生する誘導磁界がMRセンサ110の出力に影響を与えてしまう。従って、図7に示す構成では、図5に示すようなノイズ成分を含んだ出力がMRセンサ110から出力されてしまい、位置検出精度が低下してしまう。
【0032】
また、誘導磁界がMRセンサ110の出力へ与える影響は、MRセンサ110とボイスコイルモータ106のコイル106cの位置に応じて変化する。このため、レンズ移動枠102とともに移動するボイスコイルモータ106の位置によるMRセンサ110への影響度の変化を考慮して、減算器126にて減算する値を変化させることも可能である。図8は、ボイスコイルモータ106の位置に応じて、減算器126にて減算する値を変化させる構成を示す模式図である。
【0033】
図8に示す構成例では、ボイスコイルモータ106のコイル106cに印加される電流量を検知する際、CPU130を介することでより最適なノイズ検知を可能とする。例えば、CPU130は、MRセンサ110の出力を受けてボイスコイルモータ106の位置を取得し、ボイスコイルモータ106とMRセンサ110との距離に応じて減算器126にて減算する値を最適に調整する。この際、ボイスコイルモータ106とMRセンサ110との距離が近い程、MRセンサ110の出力に与える誘導磁界の影響が大きくなるため、CPU130は、ボイスコイルモータ106とMRセンサ110との距離が近い程、検出アンプ122の出力が大きくなるように調整を行う。また、CPU130は、フィルタ(filter)を用いて検知誤差の補正や特定周波数の選択などを行うことにより、更にインテリジェントな動作を行うことが可能である。
【0034】
また、ノイズ成分を引き算する上記構成は、変形が可能であり、例えば制御ブロック120内においてノイズを減算することも可能である。
【0035】
以上のように、本実施形態によれば、ボイスコイルモータ106の可動時において、位置情報に混入する誤差分が発生しないことから、レンズ移動枠102の移動中においても、正確な位置情報を得られることにより、制御精度の向上が可能となる。これにより、撮像される画像の高画質化及び、高倍率化に伴い、レンズ位置制御の高精度化が必要となるが、このようなレンズ位置制御の高精度化にも対応することが可能となる。
【0036】
また、これまで、誘導磁界の影響を避けるためにボイスコイルモータ106とMRセンサ110とは一定の距離を確保して配置していたが、本実施形態によれば、MRセンサ110とボイスコイルモータ106(の磁気回路)とを接近して配置することが可能となり、レンズ移動枠102及びその周辺の構造の小型化(レンズユニット全体の小型化)が可能となり、この小型化に起因してレンズ移動枠102の剛性を更に高めることができる。これにより、レンズ移動枠102の制御安定性及び制御精度の向上を更に高めることが可能となる。
【0037】
また、高倍率対応や、一眼レフなどの大型の撮像素子を使用するカメラにおいては、レンズ重量が増すことによりボイスコイルモータ106が発生する推力アップが必要となり、磁気回路の複数使用が発生する。このように、複数のボイスコイルモータ106を使用する構成においても、MRセンサ110出力からノイズの影響をキャンセルすることが可能である。
【0038】
図9は、MRセンサ110とボイスコイルモータ106(の磁気回路)とを接近して配置した構成例を示す模式図である。図1に示す構成例では、レンズ移動枠102に設けられたアーム103に検出用マグネット108を搭載したが、図9に示す構成例では、上側に設けられたシャフト101の近辺に検出用マグネット108を搭載している。そして、MRセンサ110は、検出用マグネット108の近傍に配置される。このような構成によれば、MRセンサ110とボイスコイルモータ106とを接近して配置することにより、更なる小型化を達成できるとともに、剛性を高めることが可能となる。
【0039】
以上説明したように本実施形態によれば、ボイスコイルモータ106のコイル106が発生する誘導磁気に基づいてMRセンサ110の出力を補正するようにしたため、位置検出を高精度に行うことが可能となる。また、MRセンサ110とボイスコイルモータ106を近接して配置することが可能になるため、装置の大幅な小型化を達成するとともに、高性能な位置検出精度を確保することができる。
【0040】
なお、上述した例では、レンズ移動枠102をリニアに駆動するボイスコイルモータ106を例に挙げて説明したが、本発明はこれに限定されるものではない。例えば、回転軸を有するモータを用いて鏡筒を回動してレンズ移動枠102を移動する構成においても、上述した実施形態と同様にモータの誘導磁気による影響を抑えることができ、MRセンサへの誘導磁気の影響を抑止することが可能である。また、位置検出用のセンサについてもMRセンサに限定されるものではなく、例えばホール素子を用いたものであっても良い。
【0041】
以上、添付図面を参照しながら本発明の好適な実施形態について詳細に説明したが、本発明はかかる例に限定されない。本発明の属する技術の分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本発明の技術的範囲に属するものと了解される。
【符号の説明】
【0042】
100 位置検出ユニット
102 レンズ移動枠
106 ボイスコイルモータ
110 MRセンサ
122 アンプ
126 減算部
230 CPU
200 撮像素子
【技術分野】
【0001】
本発明は、位置検出装置及び撮像装置に関する。
【背景技術】
【0002】
近時においては、デジタルカメラ等の撮像装置において、光学レンズの位置を検出するためにMRセンサ等の位置検出装置が用いる技術が知られている。例えば、下記の特許文献1には、MRセンサからの出力が変動した場合にも、ゲインやオフセットを調整することで、MRセンサの出力を一定にすることを想定した技術が記載されている。また、下記の特許文献2には、MRセンサのオフセット電圧の調整部を無くし、増幅器のダイナミックレンジを最大限に利用可能とすることを想定した技術が記載されている。
提供する
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−356733号公報
【特許文献2】特開平6−313718号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、撮像装置においては、光学レンズを駆動するためにボイスコイルモータ等の磁力を用いたアクチュエータが通常用いられている。これらのアクチュエータは、誘導磁気を発生するため、誘導磁気がMRセンサの出力に影響を及ぼしてしまい、正確な位置検出が困難になるという問題が生じていた。
【0005】
誘導磁気の影響を抑えるためには、MRセンサにコイルの影響が生じないように、MRセンサとアクチュエータとの間の距離を十分に遠ざけて配置する必要がある。しかしながら、MRセンサとアクチュエータとの間の距離を十分に遠ざけると、装置の構成が大型化するとともに、各部品の剛性が低下することにより位置検出精度が低下してしまう。従って、レンズを所望の位置に駆動することができず、画質の劣化等の問題が生じてしまう。
【0006】
そこで、本発明は、上記問題に鑑みてなされたものであり、本発明の目的とするところは、誘導磁気の影響を抑えて高精度に位置を検出することが可能な、新規かつ改良された位置検出装置及び撮像装置を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のある観点によれば、磁気コイルを有し、磁力により駆動力を発生させるアクチュエータと、前記アクチュエータにより駆動される移動部と、前記移動部の位置を検出する磁気抵抗素子と、前記磁気コイルに流れる電流に基づいて、前記磁気抵抗素子の出力を補正する補正部と、を備える位置検出装置が提供される。
【0008】
上記構成によれば、磁気コイルに流れる電流に基づいて、磁気抵抗素子の出力が補正されるため、磁気コイルの誘導磁気によるノイズ成分が磁気抵抗素子の出力に含まれてしまうことを抑止できる。従って、移動部の位置を高精度に検出することが可能となる。
【0009】
前記補正部は、前記磁気コイルに流れる電流を検出するアンプと、前記アンプの出力を前記磁気抵抗素子の出力から減算する減算部と、を含む。この構成によれば、前記磁気コイルに流れる電流が検出されて、磁気抵抗素子の出力から減算されるため、磁気コイルの誘導磁気によるノイズ成分を過不足なくキャンセルすることが可能となる。
【0010】
前記補正部は、前記磁気コイルに流れる電流と、前記磁気抵抗素子の出力から求まる前記磁気抵抗素子と前記アクチュエータとの距離とに基づいて、前記磁気抵抗素子の出力を補正する。この構成によれば、磁気コイルの誘導磁気が磁気抵抗素子の出力に与えるノイズ成分は、磁気抵抗素子とアクチュエータとの距離に応じて変化するため、磁気抵抗素子の出力から求まる磁気抵抗素子と前記アクチュエータとの距離に基づいて、磁気抵抗素子の出力を補正することによって、磁気コイルの誘導磁気によるノイズ成分が磁気抵抗素子の出力に含まれてしまうことをより確実に抑えることができる。
【0011】
また、上記課題を解決するために、本発明の別の観点によれば、磁気コイルを有し、磁力により駆動力を発生させるアクチュエータと、光学レンズが装着され、前記アクチュエータにより駆動されるレンズ移動枠と、前記レンズ移動枠の位置を検出する磁気抵抗素子と、前記磁気コイルに流れる電流に基づいて、前記磁気抵抗素子の出力を補正する補正部と、を備える撮像装置が提供される。
【0012】
上記構成によれば、磁気コイルに流れる電流に基づいて、磁気抵抗素子の出力が補正されるため、磁気コイルの誘導磁気によるノイズ成分が磁気抵抗素子の出力に含まれてしまうことを抑止できる。従って、レンズ移動枠の位置を高精度に検出することが可能となる。
【0013】
前記補正部は、前記磁気コイルに流れる電流を検出するアンプと、前記アンプの出力を前記磁気抵抗素子の出力から減算する減算部と、を含む。この構成によれば、前記磁気コイルに流れる電流が検出されて、磁気抵抗素子の出力から減算されるため、磁気コイルの誘導磁気によるノイズ成分を過不足なくキャンセルすることが可能となる。
【0014】
前記補正部は、前記磁気コイルに流れる電流と、前記磁気抵抗素子の出力から求まる前記磁気抵抗素子と前記アクチュエータとの距離とに基づいて、前記磁気抵抗素子の出力を補正する。この構成によれば、磁気コイルの誘導磁気が磁気抵抗素子の出力に与えるノイズ成分は、磁気抵抗素子とアクチュエータとの距離に応じて変化するため、磁気抵抗素子の出力から求まる磁気抵抗素子と前記アクチュエータとの距離に基づいて、磁気抵抗素子の出力を補正することによって、磁気コイルの誘導磁気によるノイズ成分が磁気抵抗素子の出力に含まれてしまうことをより確実に抑えることができる。
【発明の効果】
【0015】
本発明によれば、誘導磁気の影響を抑えて高精度に位置を検出することが可能な位置検出装置及び撮像装置を提供することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施形態に係る撮像装置の構成を示す模式図である。
【図2】本実施形態に係る撮像装置において、光学レンズを光軸方向に移動させるためにボイスコイルモータ(VCM)を設けるとともに、MRセンサと検出用マグネットを搭載したユニットを示す模式図である。
【図3】検出用マグネットの表面に着磁されたN極、S極と、MRセンサとの位置関係を示す模式図である。
【図4】MRセンサの出力波形を示す模式図である。
【図5】MRセンサの出力にノイズ成分が混入した状態を示す特性図である。
【図6】本実施形態に係る位置検出装置の構成を示す模式図である。
【図7】MRセンサが受ける磁界の影響分を考慮していない従来の構成例を示す模式図である。
【図8】ボイスコイルモータの位置に応じて、減算器にて減算する値を変化させる構成を示す模式図である。
【図9】MRセンサとボイスコイルモータとを接近して配置した構成例を示す模式図である。
【発明を実施するための形態】
【0017】
以下に添付図面を参照しながら、本発明の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0018】
図1は、本発明の一実施形態に係る撮像装置200の構成を示す模式図である。図1に示すように、撮像装置200は、撮像素子202と、レンズ移動枠102とが筐体内に配置されて構成される。レンズ移動枠102には、被写体像を撮像素子202の撮像面に結像させる光学レンズ(フォーカスレンズ)104が設けられている。撮像装置200は、被写体の位置に応じてレンズ移動枠102及び光学レンズ104を光軸方向に移動することで、被写体像を撮像素子202の撮像面に合焦させる。
【0019】
図2は、本実施形態に係る撮像装置200において、光学レンズ104を光軸方向に移動させるためにボイスコイルモータ(VCM)106を設けるとともに、MRセンサ(磁気抵抗素子)110と検出用マグネット108を搭載した位置検出ユニット100を示す模式図である。図2に示すユニット100は、シャフト101、レンズ移動枠102、レンズ104、ボイスコイルモータ106、検出用マグネット108、MRセンサ110を有して構成される。なお、ここではボイスコイルモータ106がフォーカスレンズを移動させる構成を例示するが、ボイスコイルモータ106はズーム光学系を移動させるものであってもよい。
【0020】
レンズ移動枠102にはシャフト101が貫通しており、レンズ移動枠102は、シャフト101の軸方向にスライド可能とされている。ボイスコイルモータ106は、マグネット106a、鉄板106b、及びコイル106cから構成されている。ボイスコイルモータ106のコイル106cはレンズ移動枠102に固定されている。一方、ボイスコイルモータ106の鉄板106bとマグネット106aは、撮像装置200の筐体側に固定されている。ボイスコイルモータ106のコイル106cに電流を流した際、磁界により発生する力によってコイル106cが移動する。これにより、レンズ移動枠102が、コイル106cとともにシャフト101に沿って移動する。
【0021】
また、検出用マグネット108は、レンズ移動枠102に固定されている。検出用マグネット108は、レンズ移動枠102の移動方向に沿って延在しており、その表面にはN極、S極が所定のピッチλで着磁されているMRセンサ110は、そのセンサ面が検出用マグネット108の表面と対向し、センサ面とマグネット108の表面との間に所定の間隔(ギャップ)をおいた状態で撮像装置の固定部材に固定されている。
【0022】
レンズ移動枠102が移動すると、固定されているMRセンサ110に対して検出用マグネット108が移動し、MRセンサ110のセンサ面に対して検出用マグネット108のN極、S極が横切り、MRセンサ110から所定の信号が出力されることになる。
【0023】
図3は、検出用マグネット108の表面に着磁されたN極、S極と、MRセンサ110との位置関係を示す模式図である。MRセンサ110の表面にはN極、S極が所定のピッチλで着磁されている。本実施形態において、ピッチλは一例として0.2mmである。
【0024】
図4は、MRセンサ110の出力波形を示す模式図である。図4に示すように、MRセンサ110は、その近傍に平行に配置された検出用マグネット108がレンズ移動枠102とともに移動したときに、検出用マグネット108に着磁されているN極とS極がセンサ面を横切ることよって、N極とS極のピッチに応じたサイン(sin)波の信号を出力する。
【0025】
図4(A)、図4(B)に示すように、MRセンサ110からは、移動時の分解能を向上させるために90°位相がずれた2つの信号(A相出力とB相出力)が出力される。また、A相出力からA相反転出力が生成され(図4(C))、B相出力からB相反転出力が生成される(図4(D))。そして、図4(E)に示すように、A相出力、B相出力、A相反転出力、B相反転出力を合成し、波形の交点の間の直線部分L(太線で示す)を切り出して繋げることで、連続した位置信号を得ることができる。図4の例では、1つの直線部分Lが50μmに相当し、直線部分Lを更に分割することで位置検出精度をより高めることが可能である。
【0026】
漏れ磁界の影響はMRセンサ110の出力レベルの低下につながるため、必要な出力レベルが確保できるように、漏れ磁界の影響を考慮してMRセンサ110、検出用マグネット108及びボイスコイルモータ106が配置される。しかし、レンズ移動枠102の移動時には、ボイスコイルモータ106のコイル106cに電流を流すことで発生する誘導磁界がMRセンサ110の出力に影響を与えてしまう。この誘導磁界は、レンズ移動枠102を移動させる度に発生し、さらに制御上、不規則且つ、予測できない量となり、MRセンサ110の出力にそのままノイズ成分として混入することになる。図5は、レンズ移動枠102の移動時にボイスコイルモータ106のコイル106cに電流を流すことで発生する誘導磁界がMRセンサ110の出力に影響を与えた状態を示す特性図である。図5は、図2の構成からマグネット106aを取り外し、この状態でボイスコイルモータ106のコイル106cに電流を流した場合に、MRセンサ110の出力にノイズ成分が混入した状態を示している。マグネット106aを取り外した状態では、本来は、MRセンサ110の出力は0のまま変化しないが、誘導磁界によって図5に示すようなノイズ波形が生じてしまう。
【0027】
図5は、ボイスコイルモータ106に規定の交流電流(±200mA,1kHz)を流したときに発生する誘導磁界の影響をMRセンサ110の出力(A相出力)で観察した波形を示している。このノイズは、レンズ移動枠102の移動方向に換算すると、0.5μm程度の誤差となる。図4の例では、1つの直線部分Lが50μmに相当し、直線部分L分割することでサブミクロンを検知する高分解能にすることが可能であるため、0.5μm程度の誤差が発生した場合、本来の高精度な位置検出精度を確保することは困難である。このように、誘導磁界によってMRセンサ110の出力にノイズが混入することで、MRセンサ110による位置検出精度が低下してしまう。このため、従来では、コイル106cの影響がない位置まで、または必要精度を確保できるノイズレベルまで、MRセンサ110とボイスコイルモータ106のマグネット106a及びコイル106cとの距離を遠ざけて配置することで誘導磁界の影響を避けていたが、この場合、必要なスペースが増大して装置が大型化してしまう。
【0028】
このため、本実施形態では、ボイスコイルモータ106による誘導磁気の影響を検出して、これに基づいてMRセンサ110の出力を補正するようにしている。図6は、本実施形態に係る位置検出装置の構成を示す模式図である。図6に示すように、本システムは、ボイスコイルモータ106、制御ブロック120、アンプ122、MRセンサ110、アンプ124、減算器126、を有して構成される。
【0029】
図6において、制御ブロック120は、ボイスコイルモータ106の駆動を制御する。検出アンプ122は、ボイスコイルモータ106のコイル106cに流れる電流量を取得する。アンプ124は、MRセンサ110の出力を増幅する。また、MRセンサ110とアンプ124を含むブロックには、MRセンサ110の出力の振幅をオフセットする機能を持たせても良い。
【0030】
ボイスコイルモータ106のコイル106cに印加される電流量と発生する磁界の量は比例していることから、検出アンプ122は、MRセンサ110にて受ける磁界の影響分をキャンセルするため、コイル106cに流れる電流量を所定の係数倍に増幅し、減算器126は、アンプ124の出力から検出アンプ122の出力を減算する。検出アンプ122及び減算器126は、MRセンサ110の出力を補正する補正部として機能する。これにより、図5で説明したノイズ成分をキャンセルすることができ、正確な位置情報を制御ブロック120へ伝達することができる。
【0031】
図7は、比較のため、MRセンサ110が受ける磁界の影響分を考慮していない従来の構成例を示している。図2に示すように、MRセンサ110と検出用マグネット108は、ボイスコイルモータ106から適当な距離を置いている。これは、ボイスコイルモータ106の漏れ磁界の影響を避けるためであるが、ボイスコイルモータ106のマグネット106aとMRセンサ110はともに筐体側に固定されているため、MRセンサ110は漏れ磁界を静的な影響として受ける。更に、レンズ移動枠102の移動時には、ボイスコイルモータ106のコイル106cに電流を流すことで発生する誘導磁界がMRセンサ110の出力に影響を与えてしまう。従って、図7に示す構成では、図5に示すようなノイズ成分を含んだ出力がMRセンサ110から出力されてしまい、位置検出精度が低下してしまう。
【0032】
また、誘導磁界がMRセンサ110の出力へ与える影響は、MRセンサ110とボイスコイルモータ106のコイル106cの位置に応じて変化する。このため、レンズ移動枠102とともに移動するボイスコイルモータ106の位置によるMRセンサ110への影響度の変化を考慮して、減算器126にて減算する値を変化させることも可能である。図8は、ボイスコイルモータ106の位置に応じて、減算器126にて減算する値を変化させる構成を示す模式図である。
【0033】
図8に示す構成例では、ボイスコイルモータ106のコイル106cに印加される電流量を検知する際、CPU130を介することでより最適なノイズ検知を可能とする。例えば、CPU130は、MRセンサ110の出力を受けてボイスコイルモータ106の位置を取得し、ボイスコイルモータ106とMRセンサ110との距離に応じて減算器126にて減算する値を最適に調整する。この際、ボイスコイルモータ106とMRセンサ110との距離が近い程、MRセンサ110の出力に与える誘導磁界の影響が大きくなるため、CPU130は、ボイスコイルモータ106とMRセンサ110との距離が近い程、検出アンプ122の出力が大きくなるように調整を行う。また、CPU130は、フィルタ(filter)を用いて検知誤差の補正や特定周波数の選択などを行うことにより、更にインテリジェントな動作を行うことが可能である。
【0034】
また、ノイズ成分を引き算する上記構成は、変形が可能であり、例えば制御ブロック120内においてノイズを減算することも可能である。
【0035】
以上のように、本実施形態によれば、ボイスコイルモータ106の可動時において、位置情報に混入する誤差分が発生しないことから、レンズ移動枠102の移動中においても、正確な位置情報を得られることにより、制御精度の向上が可能となる。これにより、撮像される画像の高画質化及び、高倍率化に伴い、レンズ位置制御の高精度化が必要となるが、このようなレンズ位置制御の高精度化にも対応することが可能となる。
【0036】
また、これまで、誘導磁界の影響を避けるためにボイスコイルモータ106とMRセンサ110とは一定の距離を確保して配置していたが、本実施形態によれば、MRセンサ110とボイスコイルモータ106(の磁気回路)とを接近して配置することが可能となり、レンズ移動枠102及びその周辺の構造の小型化(レンズユニット全体の小型化)が可能となり、この小型化に起因してレンズ移動枠102の剛性を更に高めることができる。これにより、レンズ移動枠102の制御安定性及び制御精度の向上を更に高めることが可能となる。
【0037】
また、高倍率対応や、一眼レフなどの大型の撮像素子を使用するカメラにおいては、レンズ重量が増すことによりボイスコイルモータ106が発生する推力アップが必要となり、磁気回路の複数使用が発生する。このように、複数のボイスコイルモータ106を使用する構成においても、MRセンサ110出力からノイズの影響をキャンセルすることが可能である。
【0038】
図9は、MRセンサ110とボイスコイルモータ106(の磁気回路)とを接近して配置した構成例を示す模式図である。図1に示す構成例では、レンズ移動枠102に設けられたアーム103に検出用マグネット108を搭載したが、図9に示す構成例では、上側に設けられたシャフト101の近辺に検出用マグネット108を搭載している。そして、MRセンサ110は、検出用マグネット108の近傍に配置される。このような構成によれば、MRセンサ110とボイスコイルモータ106とを接近して配置することにより、更なる小型化を達成できるとともに、剛性を高めることが可能となる。
【0039】
以上説明したように本実施形態によれば、ボイスコイルモータ106のコイル106が発生する誘導磁気に基づいてMRセンサ110の出力を補正するようにしたため、位置検出を高精度に行うことが可能となる。また、MRセンサ110とボイスコイルモータ106を近接して配置することが可能になるため、装置の大幅な小型化を達成するとともに、高性能な位置検出精度を確保することができる。
【0040】
なお、上述した例では、レンズ移動枠102をリニアに駆動するボイスコイルモータ106を例に挙げて説明したが、本発明はこれに限定されるものではない。例えば、回転軸を有するモータを用いて鏡筒を回動してレンズ移動枠102を移動する構成においても、上述した実施形態と同様にモータの誘導磁気による影響を抑えることができ、MRセンサへの誘導磁気の影響を抑止することが可能である。また、位置検出用のセンサについてもMRセンサに限定されるものではなく、例えばホール素子を用いたものであっても良い。
【0041】
以上、添付図面を参照しながら本発明の好適な実施形態について詳細に説明したが、本発明はかかる例に限定されない。本発明の属する技術の分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本発明の技術的範囲に属するものと了解される。
【符号の説明】
【0042】
100 位置検出ユニット
102 レンズ移動枠
106 ボイスコイルモータ
110 MRセンサ
122 アンプ
126 減算部
230 CPU
200 撮像素子
【特許請求の範囲】
【請求項1】
磁気コイルを有し、磁力により駆動力を発生させるアクチュエータと、
前記アクチュエータにより駆動される移動部と、
前記移動部の位置を検出する磁気抵抗素子と、
前記磁気コイルに流れる電流に基づいて、前記磁気抵抗素子の出力を補正する補正部と、
を備えることを特徴とする、位置検出装置。
【請求項2】
前記補正部は、前記磁気コイルに流れる電流を検出するアンプと、
前記アンプの出力を前記磁気抵抗素子の出力から減算する減算部と、を含むことを特徴とする、請求項1に記載の位置検出装置。
【請求項3】
前記補正部は、前記磁気コイルに流れる電流と、前記磁気抵抗素子の出力から求まる前記磁気抵抗素子と前記アクチュエータとの距離とに基づいて、前記磁気抵抗素子の出力を補正することを特徴とする、請求項1に記載の位置検出装置。
【請求項4】
磁気コイルを有し、磁力により駆動力を発生させるアクチュエータと、
光学レンズが装着され、前記アクチュエータにより駆動されるレンズ移動枠と、
前記レンズ移動枠の位置を検出する磁気抵抗素子と、
前記磁気コイルに流れる電流に基づいて、前記磁気抵抗素子の出力を補正する補正部と、
を備えることを特徴とする、撮像装置。
【請求項5】
前記補正部は、前記磁気コイルに流れる電流を検出するアンプと、
前記アンプの出力を前記磁気抵抗素子の出力から減算する減算部と、を含むことを特徴とする、請求項4に記載の撮像装置。
【請求項6】
前記補正部は、前記磁気コイルに流れる電流と、前記磁気抵抗素子の出力から求まる前記磁気抵抗素子と前記アクチュエータとの距離とに基づいて、前記磁気抵抗素子の出力を補正することを特徴とする、請求項4に記載の撮像装置。
【請求項1】
磁気コイルを有し、磁力により駆動力を発生させるアクチュエータと、
前記アクチュエータにより駆動される移動部と、
前記移動部の位置を検出する磁気抵抗素子と、
前記磁気コイルに流れる電流に基づいて、前記磁気抵抗素子の出力を補正する補正部と、
を備えることを特徴とする、位置検出装置。
【請求項2】
前記補正部は、前記磁気コイルに流れる電流を検出するアンプと、
前記アンプの出力を前記磁気抵抗素子の出力から減算する減算部と、を含むことを特徴とする、請求項1に記載の位置検出装置。
【請求項3】
前記補正部は、前記磁気コイルに流れる電流と、前記磁気抵抗素子の出力から求まる前記磁気抵抗素子と前記アクチュエータとの距離とに基づいて、前記磁気抵抗素子の出力を補正することを特徴とする、請求項1に記載の位置検出装置。
【請求項4】
磁気コイルを有し、磁力により駆動力を発生させるアクチュエータと、
光学レンズが装着され、前記アクチュエータにより駆動されるレンズ移動枠と、
前記レンズ移動枠の位置を検出する磁気抵抗素子と、
前記磁気コイルに流れる電流に基づいて、前記磁気抵抗素子の出力を補正する補正部と、
を備えることを特徴とする、撮像装置。
【請求項5】
前記補正部は、前記磁気コイルに流れる電流を検出するアンプと、
前記アンプの出力を前記磁気抵抗素子の出力から減算する減算部と、を含むことを特徴とする、請求項4に記載の撮像装置。
【請求項6】
前記補正部は、前記磁気コイルに流れる電流と、前記磁気抵抗素子の出力から求まる前記磁気抵抗素子と前記アクチュエータとの距離とに基づいて、前記磁気抵抗素子の出力を補正することを特徴とする、請求項4に記載の撮像装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−184983(P2012−184983A)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願番号】特願2011−47177(P2011−47177)
【出願日】平成23年3月4日(2011.3.4)
【出願人】(500548884)三星テクウィン株式会社 (156)
【氏名又は名称原語表記】Samsung Techwin Co., Ltd
【住所又は居所原語表記】28 Sungju−dong,Changwon−city,Kyongsangnam−do,Republic of Korea
【Fターム(参考)】
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願日】平成23年3月4日(2011.3.4)
【出願人】(500548884)三星テクウィン株式会社 (156)
【氏名又は名称原語表記】Samsung Techwin Co., Ltd
【住所又は居所原語表記】28 Sungju−dong,Changwon−city,Kyongsangnam−do,Republic of Korea
【Fターム(参考)】
[ Back to top ]