
位置検出装置及び電子機器
【課題】構成部品の数を相対的に減らす。
【解決手段】位置検出装置は、磁界を発生させる第1コイル部81、82、83と、第1コイル部により発生させられる磁界が到達する位置にあり、且つ両端部の状態を開放状態から短絡状態へ及び短絡状態から開放状態へと切り替え可能な弾性を有する第2コイル部71、72、73と、位置検出の対象となる対象物の移動に伴って移動すると共に、移動に伴う第2コイル部との接触によって第2コイル部を弾性変形させることで第2コイル部の両端部の状態を開放状態から短絡状態へと又は短絡状態から開放状態へと切り替える移動部32、56と、第1コイル部の電圧に基づいて、対象物の位置を検出する検出部を備える。
【解決手段】位置検出装置は、磁界を発生させる第1コイル部81、82、83と、第1コイル部により発生させられる磁界が到達する位置にあり、且つ両端部の状態を開放状態から短絡状態へ及び短絡状態から開放状態へと切り替え可能な弾性を有する第2コイル部71、72、73と、位置検出の対象となる対象物の移動に伴って移動すると共に、移動に伴う第2コイル部との接触によって第2コイル部を弾性変形させることで第2コイル部の両端部の状態を開放状態から短絡状態へと又は短絡状態から開放状態へと切り替える移動部32、56と、第1コイル部の電圧に基づいて、対象物の位置を検出する検出部を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば対象物の位置を検出する位置検出装置及びこのような位置検出装置を備える電子機器の技術分野に関する。
【背景技術】
【0002】
DVD(Digital Versatile Disc)や、CD(Compact Disc)、ブルーレイディスク(BD:Blu-ray Disc)等の光ディスクに対し、情報の記録又は再生を行うディスクドライブがある。ディスクドライブは、ディスクプレーヤや、ディスクレコーダや、オーディオシステムや、パーソナルコンピュータや、カーナビゲーションシステム等の様々な装置に用いられている。このようなディスクドライブは、光ディスクを着脱することができる。光ディスクを着脱する方式として、スロットイン方式や、ドロアー方式や、トレー方式等がある。
【0003】
スロットイン方式のディスクドライブにおけるローディング動作は、例えば次の通りである。ユーザは、光ディスクの端部をディスクスロットに挿入し、光ディスクをディスクドライブの内部に向けて軽く押し込む。すると、ディスクドライブは、例えばローディングアームなどのローディング機構によって光ディスクをディスクドライブの内部に引き込み、光ディスクの中心がターンテーブル上に位置するまで光ディスクを搬送する。続いて、ディスクドライブは、光ディスクをターンテーブル上に固定(クランプ)する。
【0004】
スロットイン方式のディスクドライブにおけるイジェクト動作は、例えば次の通りである。ディスクドライブ内のターンテーブル上にクランプされた光ディスクをイジェクト(排出)する旨の指示が発せられると、当該指示に応じて、ディスクドライブは、光ディスクのクランプを解除する。続いて、ディスクドライブは、例えばイジェクトアームなどのイジェクト機構により、光ディスクを、ディスクスロットを通してディスクドライブの外側へ押し出す。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】平5−128695号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
以上のような光ディスクの搬送制御(つまり、ローディング及びイジェクトの制御)は、光ディスクの位置の検出結果に応じて光ディスクの搬送の開始及び停止のタイミング等を決定することで行われる。光ディスクの位置を検出する方法として、例えば以下の方法が考えられる。まず、搬送される光ディスクと接触することで移動するレバーが光ディスクの搬送経路上に設けられ、且つ当該レバーと接触可能な位置に、当該レバーと接触しているか否かに応じてオン・オフが切り替わるメカニカルスイッチが設けられる。メカニカルスイッチの状態(つまり、レバーと接触することでメカニカルスイッチがオンになっている状態又はレバーと接触しないことでメカニカルスイッチがオフになっている状態)は、メイン基板上の検出回路に対して電気的に(つまり、電気信号として)伝えられる。その結果、検出回路は、メカニカルスイッチの状態に応じて、光ディスクの通過の有無(或いは、光ディスクの位置)を検出する。
【0007】
しかしながら、ディスクドライブのサイズの制約ないしはレイアウトの制約により、メカニカルスイッチと検出回路とを同一のメイン基板上に設けることができない場合がある。この場合、メカニカルスイッチと検出回路(或いは、メイン基板)とは、メイン基板の外部に設けられた電気的な配線(例えば、FPC:Flexible Print Circuit)を介して接続される。しかしながら、メイン基板の外部に電気的な配線が設けられるがゆえに、ディスクドライブを構成する部品の数が相対的に増えてしまい、全体のコストが増大するという技術的な問題点が生ずる。また、本体の金属部材によってFPCが断線しないように、装置外側を迂回させるようにレイアウトする必要があった。そのため、大型のFPCが必要であり、全体のコスト増大の要因となっていた。また、組み立て時の作業が煩雑になるという問題点が生じていた。
【0008】
本発明が解決しようとする課題には上記のようなものが一例として挙げられる。本発明は、構成部品の数を相対的に減らすことが可能な位置検出装置及び電子機器を提供することを課題とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、位置検出装置は、磁界を発生させる第1コイル部と、前記第1コイル部により発生させられる磁界が到達する位置にあり、且つ両端部の状態を開放状態から短絡状態へ及び短絡状態から開放状態へと切り替え可能な弾性を有する第2コイル部と、位置検出の対象となる対象物の移動に伴って移動すると共に、当該移動に伴う前記第2コイル部との接触によって前記第2コイル部を弾性変形させることで前記第2コイル部の両端部の状態を開放状態から短絡状態へと又は短絡状態から開放状態へと切り替える移動部と、前記第1コイル部の両端の電圧の変化に基づいて、前記対象物の位置を検出する検出部とを備える。
【0010】
上記課題を解決するために、電子機器は、上述した位置検出装置を備える。
【図面の簡単な説明】
【0011】
【図1】ディスクドライブの外観を示す斜視図である。
【図2】ディスクドライブの内部構成を示す平面図である。
【図3】ねじりコイルばねの両端部分の状態が開放状態から短絡状態へと又は短絡状態から開放状態へと切り替わる態様を示す平面図である。
【図4】メイン基板の構成を示す平面斜視図である。
【図5】位置検出回路による位置検出の手法の流れを示すフローチャートである。
【図6】光ディスクの搬送動作の一過程を示す平面図である。
【図7】光ディスクの搬送動作の一過程を示す平面図である。
【図8】光ディスクの搬送動作の一過程を示す平面図である。
【図9】光ディスクの搬送動作の一過程を示す平面図である。
【発明を実施するための形態】
【0012】
以下、位置検出装置及び電子機器の実施形態について順に説明する。
【0013】
(位置検出装置の実施形態)
本実施形態の位置検出装置は、磁界を発生させる第1コイル部と、前記第1コイル部により発生させられる磁界が到達する位置にあり、且つ両端部の状態を開放状態から短絡状態へ及び短絡状態から開放状態へと切り替え可能な弾性を有する第2コイル部と、位置検出の対象となる対象物の移動に伴って移動すると共に、当該移動に伴う前記第2コイル部との接触によって前記第2コイル部を弾性変形させることで前記第2コイル部の両端部の状態を開放状態から短絡状態へと又は短絡状態から開放状態へと切り替える移動部と、前記第1コイル部の両端の電圧の変化に基づいて、前記対象物の位置を検出する検出部とを備える。
【0014】
本実施形態の位置検出装置によれば、第1コイル部は、磁界を発生させる。例えば、第1コイル部に対して電源から電流が供給されることで第1コイル部に電流が流れ、その結果、第1コイル部から磁界が発生する。
【0015】
第2コイル部は、第1コイル部から発生した磁界が到達する位置に配置される。言い換えれば、第2コイル部は、第1コイル部を流れる電流によって形成される磁場内に(又は、当該磁場の影響を受ける範囲)に配置される。第2コイル部は弾性を有している。第2コイル部が有している弾性によって、第2コイル部の両端部(例えば、第2コイル部のうちの巻き線部から延びる2つの導線部)の状態は、開放状態(言い換えれば、非接続状態ないしは絶縁状態)から短絡状態(言い換えれば、接続状態ないしは導通状態)へと切り替えられる。同様に、第2コイル部が有している弾性によって、第2コイル部の両端部の状態は、短絡状態から開放状態へと切り替えられる。
【0016】
移動部は、本実施形態の位置検出装置による位置検出の対象となる対象物の移動に伴って移動する。例えば、移動部は、対象物に直接接触することで移動していてもよい。この場合、対象物の移動に伴って対象物と移動部とが接触し、その結果、移動部は、対象物との接触によって移動部に加えられる力(言い換えれば、対象物から移動部に直接的に加えられる力)によって移動してもよい。或いは、例えば、移動部は、対象物との間に所定の介在構造物を介在させていてもよい。この場合、対象物の移動に伴って対象物と介在構造物が接触し、その結果、介在構造物は、対象物との接触によって介在構造物に直接加えられる力によって移動してもよい。その結果、介在構造物の移動に伴って介在構造物と移動部が接触し、その結果、移動部は、介在構造物との接触によって移動部に加えられる力(言い換えれば、対象物から移動部に間接的に加えられる力)によって移動してもよい。
【0017】
このような対象物の移動に伴って移動する移動部との接触状態に応じて、第2コイル部の両端部の状態の切り替えが行われる。具体的には、移動部が第2コイル部と接触することで、第2コイル部は、自身の弾性に応じて弾性変形する。その結果、弾性変形前の第2コイル部の両端部の状態が短絡状態である場合には、第2コイル部の両端部の状態は、短絡状態から開放状態へと切り替えられる。或いは、弾性変形前の第2コイル部の両端部の状態が開放状態である場合には、第2コイル部の両端部の状態は、開放状態から短絡状態へと切り替えられる。
【0018】
尚、移動部と第2コイル部との接触によって第2コイル部の両端部の状態が切り替わることを考慮すれば、移動部は、第2コイル部の両端部の状態を変えることができる程度の力を第2コイル部に加えることができるように移動することが好ましい。言い換えれば、移動部は、第2コイル部の両端部の状態を変えることができる程度の力を第2コイル部に加えることができるように、対象物の移動に伴って移動することが好ましい。
【0019】
第2コイル部の両端部の状態が開放状態である場合には、第2コイル部は、いわゆるコイル(言い換えれば、インダクタ)としては作用しない。一方で、第2コイル部の両端部の状態が短絡状態である場合には、第2コイル部は、いわゆるコイル(言い換えれば、インダクタ)として作用する。従って、第2コイル部がコイルとして作用する状態からコイルとして作用しない状態に切り替わる又は第2コイル部がコイルとして作用しない状態からコイルとして作用する状態に切り替わることで、第1コイル部が第2コイル部の影響を受けたり或いは受けなかったりする。その結果、第1コイル部が発生する磁界(或いは、第1コイル部の両端の電圧(つまり、端子間電圧))が変化する。
【0020】
このような第1コイル部の両端の電圧の変化は、第2コイル部がコイルとして作用するか否かに応じて決まる。第2コイル部がコイルとして作用するか否かは、第2コイル部の両端部の状態が開放状態であるか又は短絡状態であるかに応じて決まる。第2コイル部の両端部の状態が開放状態であるか又は短絡状態であるかは、移動部が第2コイル部に接触しているか否かに応じて決まる。移動部が第2コイル部に接触しているか否かは、対象物の移動の程度によって決まる。従って、検出部は、第1コイル部の両端の電圧の変化を検出することで、対象物の移動の程度(言い換えれば、対象物の位置)を検出することができる。
【0021】
本実施形態の位置検出装置によれば、第2コイル部と検出部とを電気的に接続しなくとも、第2コイル部の状態(言い換えれば、移動部の状態であり、更に言い換えれば、対象物の移動状態ないしは位置)を検出することができる。つまり、本実施形態の検出部は、2値的に定まる第2コイル部の状態を、第2コイル部の状態による影響を受ける第1コイル部の両端の電圧の変化を検出することで判定することができる。従って、例えば、メイン基板上に検出部を配置し且つメイン基板とは離れた位置に第2コイル部を配置する場合であっても、検出部と第2コイル部とを接続する電気的な配線を設けなくともよくなる。つまり、第2コイル部をいわゆるワイヤレススイッチとして用いることができる。
【0022】
仮に、第2コイル部に代えて、電気的なオン信号(言い換えれば、接触信号)及びオフ信号(言い換えれば、非接触信号)を用いて移動部との接触状態を検出部に伝えるメカニカルスイッチを用いる比較例の位置検出装置であれば、メカニカルスイッチと検出部とは、電気的な配線で接続される必要がある。しかるに、本実施形態の位置検出装置によれば、このような電気的な配線を設けなくともよいため、比較例の位置検出装置と比較して、位置検出装置を構成する構成部品の数を減らすことができ、コスト増加を抑えることができる。
【0023】
更に、本実施形態の位置検出装置によれば、検出部が配置されるメイン基板の外部に電気的な配線を設けなくともよくなるため、電気的な配線の断線による検出精度の悪化ないしは検出動作の技術的な不具合が生ずることは殆ど又は全くなくなる。従って、比較例の位置検出装置と比較して、信頼性の高い位置検出装置を実現することができる。
【0024】
加えて、本実施形態の位置検出装置によれば、比較例の位置検出装置と比較して、相対的に重いメカニカルスイッチ及び電気的な配線に代えて、相対的に軽いコイルを用いて対象物の位置を検出することができる。従って、比較例の位置検出装置と比較して、重量が相対的に軽い位置検出装置を実現することができる。このような重量の利点は、位置検出装置が搭載される電子機器の小型化及び軽量化の要請が強い技術分野において特に有効である。
【0025】
本実施形態の位置検出装置の一の態様は、前記移動部が前記第2コイル部に接触していない場合には、前記第2コイル部の両端部の状態は短絡状態であり、前記第2コイル部と前記移動部との接触によって前記第2コイル部が弾性変形することで、前記第2コイル部の両端部の状態が短絡状態から開放状態に切り替わる。
【0026】
この態様によれば、移動部と第2コイル部の接触によって、初期状態では短絡状態にあった第2コイル部の両端部の状態が開放状態へと切り替えられる。つまり、移動部と第2コイル部の接触によって、第2コイル部の両端部が離される。この場合、第2コイル部の両端部が少しでも移動する程度に移動部が第2コイル部に接触すれば、第2コイル部の両端部の状態が開放状態へと切り替わる。従って、移動部と第2コイル部との接触の程度の強弱ないしはばらつきの影響を殆ど又は全く受けることなく、第2コイル部の両端部の状態を短絡状態から開放状態へと切り替えることができる。従って、移動部の移動を左右する対象物の位置の検出精度を相対的に上げることができる。
【0027】
尚、対象物の位置を検出するという観点から見れば、移動部が第2コイル部に接触していない場合には、第2コイル部の両端部の状態は開放状態にあり、第2コイル部と移動部との接触によって第2コイル部が弾性変形することで、第2コイル部の両端部の状態が開放状態から短絡状態に切り替えられてもよい。但し、この場合、第2コイル部の両端部の開放状態のばらつき(例えば、両端部の間の間隔の大きさのばらつき等)によっては、移動部が第2コイル部に接触したとしても、第2コイル部の両端部の状態が短絡状態へと切り替わらない場合が生じかねない。例えば、第2コイル部の両端部間の間隔が相対的に大きすぎる場合には、移動部が第2コイル部に接触したとしても、その接触の程度が相対的に弱ければ、第2コイル部の両端部の状態が短絡状態へと切り替わらない場合が生じかねない。従って、対象物の位置を検出する精度を上げるという観点から見れば、移動部が2コイル部に接触していない場合には、第2コイル部の両端部の状態は短絡状態にあり、第2コイル部と移動部との接触によって第2コイル部が弾性変形することで、第2コイル部の両端部の状態が短絡状態から開放状態に切り替えられることが好ましい。
【0028】
移動部が第2コイル部に接触していない場合に第2コイル部の両端部の状態が短絡状態である位置検出装置の態様では、前記第2コイル部の両端部の夫々は、他方側の端部と連結する連結部を備えており、前記移動部が前記第2コイル部に接触していない場合には、前記第2コイル部の両端部の前記連結部が互いに連結することで、前記第2コイル部の両端部の状態が短絡状態となり、前記第2コイル部と前記移動部との接触によって前記第2コイル部が弾性変形することで、前記第2コイル部の両端部の前記連結部の連結が解除されると共に前記第2コイル部の両端部の状態が短絡状態から開放状態に切り替わるように構成してもよい。
【0029】
このように構成すれば、第2コイル部の両端部は、連結部の連結(例えば、ひっかかりないしはかみ合い)によって短絡状態が維持されている。従って、第2コイル部の両端部の間が広がってしまう技術的な不都合を好適に抑制することができる。また、開放状態にするためには、連結部の連結を解消すればよいため、比較的容易に、第2コイル部の両端部の状態を短絡状態から開放状態へと切り替えることができる。
【0030】
第2コイルの両端部の夫々が連結部を備える位置検出装置の態様では、前記移動部が前記第2コイル部に接触していない場合には、前記第2コイル部の両端部の連結部が前記第2コイル部の弾性力によって互いに連結されることで、前記第2コイル部の両端部の状態が短絡状態となるように構成してもよい。
【0031】
このように構成すれば、第2コイル部自身の弾性を利用して、第2コイル部の両端部の状態を短絡状態にすることができる。
【0032】
本実施形態の位置検出装置の他の態様は、前記第2コイル部は、前記移動部が一の方向に沿って移動しながら前記第2コイル部に接触することで前記第2コイル部の両端部が短絡状態から開放状態へと又は短絡状態から開放状態へと切り替えられる場合には、前記移動部を前記一の方向とは逆側の他の方向に向かって押し戻すように作用する。
【0033】
この態様によれば、第2コイル部からの応力によって、移動部を元の位置に戻すことができる。
【0034】
本実施形態の位置検出装置の他の態様では、前記第1コイル部及び前記検出回路は、所定の基板上に配置されており、前記第2コイル部及び前記移動部は、前記所定の基板から離れた位置に配置されている。
【0035】
この態様によれば、例えば、所定の基板上に検出部を配置し且つ所定の基板とは離れた位置に第2コイル部を配置する場合であっても、検出部と第2コイル部とを接続する電気的な配線を設けなくともよくなる。
【0036】
(電子機器の実施形態)
本実施形態の電子機器は、上述した本実施形態の位置検出装置(但し、その各種態様をを含む)を備える。
【0037】
本実施形態の電子機器によれば、上述した本実施形態の位置検出装置が享受することができる各種効果と同様の効果を享受することができる。
【0038】
尚、上述した本実施形態の位置検出装置における各種態様に対応して、本実施形態の電子機器も各種態様を採ることが可能である。
【0039】
本実施形態の電子機器の一の態様は、前記対象物は、情報の記録及び再生の少なくとも一方が可能な光ディスクであり、当該電子機器は、前記光ディスクをスロットイン方式でローディングするディスクドライブであり、前記第1コイル部は、前記ディスクドライブが備えるプリント基板上に配置されており、前記第2コイル部及び前記移動部は、前記プリント基板から離れた位置に配置されている。
【0040】
この態様によれば、光ディスクをスロットイン方式でローディングするディスクドライブにおいて、光ディスクの位置を検出しながら上述した各種効果を享受することができる。
【0041】
本実施形態のこのような作用及び他の利得は次に説明する実施例から更に明らかにされる。
【0042】
以上説明したように、本実施形態の位置検出装置によれば、第1コイル部と、第2コイル部と、移動部と、検出部とを備える。本実施形態の電子機器によれば、本実施形態の位置検出装置を備える。従って、位置検出装置を構成する構成部品の数を相対的に減らすことができ、コスト増加を抑えることができる。
【実施例】
【0043】
以下、図面を参照しながら、位置検出装置及び電子機器の実施例について説明する。尚、以下では、位置検出装置を、電子機器の一例であるディスクドライブ10に適用した例について説明する。もちろん、位置検出装置をディスクドライブ以外の任意の電子機器に対して適用してもよい。
【0044】
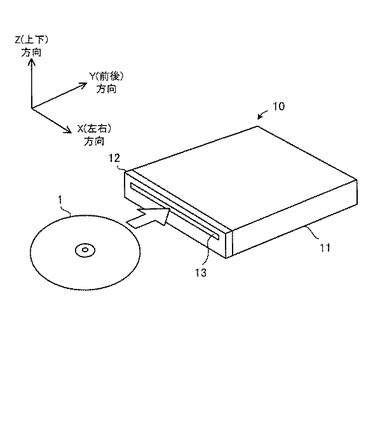
(1)ディスクドライブの外観
図1を参照して、ディスクドライブ10の外観について説明する。図1は、ディスクドライブ10の外観を示す斜視図である。
【0045】
図1に示すように、ディスクドライブ10は、光ディスク1に対し、情報の記録及び再生の少なくとも一方を行う装置である。ディスクドライブ10は、光ディスク1を着脱することができるタイプであり、また、光ディスク1の着脱方式についてスロットイン方式を採用している。尚、光ディスク1としては、例えばDVDや、CDや、ブルーレイディスク等が一例としてあげられる。
【0046】
ディスクドライブ10は、シャーシ11及びフロントカバー12を備えている。
【0047】
シャーシ11は例えば金属材料により形成され、底板を有し、必要に応じて側板、天井板を有している。
【0048】
フロントカバー12は例えば樹脂材料により形成されている。フロントカバー12にはディスクスロット13が形成されている。ディスクスロット13は、光ディスク1のローディング及びイジェクトを行うときに光ディスク1を通過させる溝である。
【0049】
なお、以下の説明では、図1中の矢示X方向を左右方向といい、矢示Y方向を前後方向といい、矢示Z方向を上下方向という。
【0050】
(2)ディスクドライブの内部構成
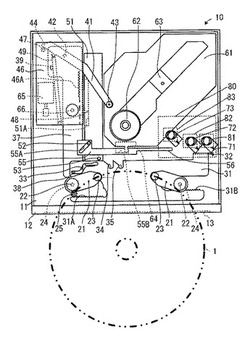
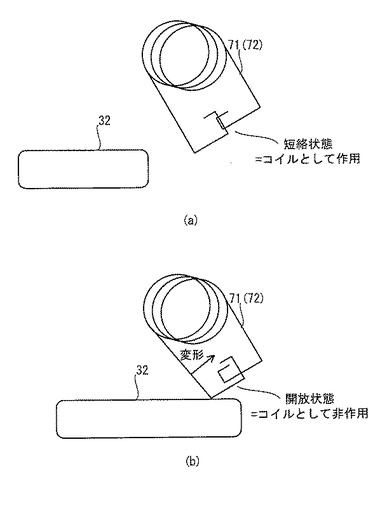
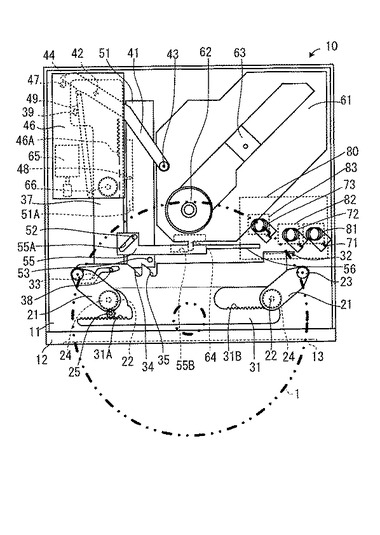
図2を参照して、ディスクドライブ10の内部構成について説明する。図2は、ディスクドライブ10の内部構成を示す平面図である。
【0051】
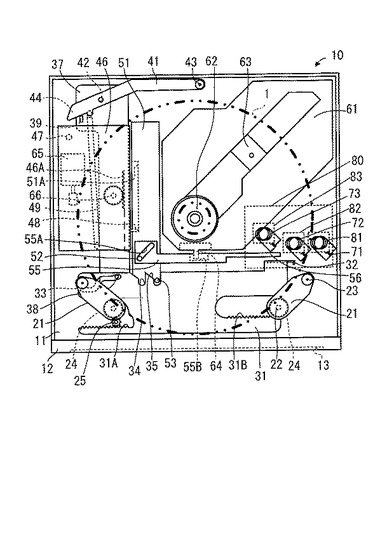
図2に示すように、ディスクドライブ10は、一対のローディングアーム21と、ラックプレート31と、セレクトプレート37と、イジェクトアーム41と、トリガープレート46と、第1シフトバー51と、第2シフトバー55と、トラバースメカ61と、モーター65と、ピニオン66と、メイン基板80とを備えている。
【0052】
ローディングアーム21は、ディスクドライブ10前側のディスクスロット13近傍の位置に左右対称に配置されている。各ローディングアーム21は、支軸22を介してシャーシ11上に回動可能に支持されている。各ローディングアーム21は例えば樹脂材料または金属材料により形成されている。
【0053】
各ローディングアーム21の先端部上面にはローラー23が回転可能に取り付けられている。ローラー23はモーター65により回転する。左側のローラー23は光ディスク1の左側周縁と接触する。右側のローラー23は光ディスク1の右側周縁と接触する。
【0054】
ローディングアーム21は、ローラー23を介して光ディスク1を狭持し、光ディスク1の搬送を行う。ローディングアーム21は、光ディスク1の前進又は後退に従って回動し、これによりローディングアーム21の先端側が開閉する。
【0055】
各ローディングアーム21の軸部下面にはギア24が固定されている。左側のギア24はピニオン25を介してラックプレート31の左側のラック部31Aに噛み合っている。右側のギア24はラックプレート31の右側のラック部31Bに直接噛み合っている。ギア24、ピニオン25並びにラック部31A及び31Bは、各ローディングアーム21の回動をラックプレート31の左右方向の移動に変換する。具体的には、各ローディングアーム21が開くときの各ローディングアーム21の回動をラックプレート31の左方向の移動に変換し、各ローディングアーム21が閉じるときの各ローディングアーム21の回動をラックプレート31の右方向の移動に変換する。
【0056】
ラックプレート31は、ディスクドライブ10前側のディスクスロット13近傍に位置し、シャーシ11とローディングアーム21との間に配置されている。ラックプレート31は、シャーシ11に左右方向に移動可能に支持されている。ラックプレート31は例えば樹脂材料又は金属材料により形成されている。ラックプレート31には一対のラック部31A及び31Bが形成されている。
【0057】
ラックプレート31の右側後部にはスイッチングエッジ32が形成されている。スイッチングエッジ32は左右方向に直線状に伸張している。ラックプレート31の左右方向の移動によりスイッチングエッジ32が左右方向に移動すると、スイッチングエッジ32とねじりコイルばね71との接触の有無又は接触の状態が変わる。その結果、ねじりコイルばね71の両端部分の状態が開放状態(言い換えれば、絶縁状態)から短絡状態(言い換えれば、導通状態)へと又は短絡状態から開放状態へと切り替わる。また、ラックプレート31の左右方向の移動によりスイッチングエッジ32が左右方向に移動すると、スイッチングエッジ32とねじりコイルばね72との接触の有無が変わる。その結果、ねじりコイルばね72の両端部分の状態が開放状態から短絡状態へと又は短絡状態から開放状態へと切り替わる。
【0058】
尚、ねじりコイルバネ71及び72は、その一部がシャーシ11に対して直接的に又は間接的に固定されていることが好ましい。ねじりコイルバネ71及び72は、シャーシ11上に形成された支軸に固定されていることが好ましい。従って、スイッチングエッジ32がねじりコイルバネ71及び72に接触した場合であっても、ねじりコイルバネ71及び72が移動することはなく、ねじりコイルバネ71及び72は、両端部分の状態が切替わる程度に弾性変形することが好ましい。尚、後述のねじりコイルバネ73についても同様である。
【0059】
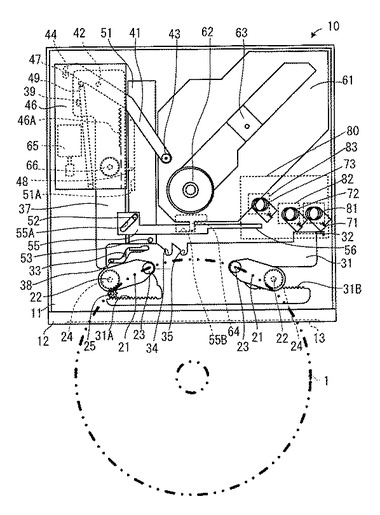
ここで、図3を参照して、「移動部」の一具体例であるラックプレート31のスイッチングエッジ32と「第2コイル部」の一具体例であるねじりコイルばね71及び72との接触の態様について説明する。言い換えれば、ねじりコイルばね71の両端部分の状態が開放状態から短絡状態へと又は短絡状態から開放状態へと切り替わる態様について説明する。図3は、ねじりコイルばね71の両端部分の状態が開放状態から短絡状態へと又は短絡状態から開放状態へと切り替わる態様を示す平面図である。尚、図3では、ねじりコイルばね71にラックプレート31のスイッチングエッジ32が接触していない状態では、ねじりコイルばね71又は72の両端部分が短絡状態にある場合の例について説明する。つまり、ねじりコイルばね71にラックプレート31のスイッチングエッジ32が接触していない状態では、ねじりコイルばね71又は72の両端部分が互いに接触している状態にある場合の例について説明する。
【0060】
図3(a)に示すように、ねじりコイルばね71にラックプレート31のスイッチングエッジ32が接触していない状態では、ねじりコイルばね71の両端部分が短絡状態にある。より具体的には、ねじりコイルばね71の両端部分は、例えば、相互に連結可能なカギ形状を有している。両端部分のカギ形状が互いに引っかかることで、ねじりコイルばね71の両端部分が短絡状態にある。この場合、ねじりコイルばね71は、電気的に又は磁気的には、コイルとして作用する。尚、ねじりコイルばね71の両端部分のカギ形状は、ねじりコイルばね71にラックプレート31のスイッチングエッジ32が接触していない状態では、例えば、ねじりコイルバネ71自身の弾性によって互いに引っかかることが好ましい。
【0061】
一方で、図3(b)に示すように、ねじりコイルばね71にラックプレート31のスイッチングエッジ32が接触すると、ねじりコイルばね71は、スイッチングエッジ32の応力によってたわむ。その結果、ねじりコイルばね71の両端部分のカギ形状の引っかかりが解消される。つまり、ねじりコイルばね71の両端部分が互いに接触しなくなる。これにより、ねじりコイルばね71の両端部分の状態が、短絡状態から開放状態に切り替わる。この場合、ねじりコイルばね71は、電気的に又は磁気的には、コイルとして作用しない。
【0062】
尚、ねじりコイルばね71がスイッチングエッジ32の応力によってたわんでいる場合には、ねじりコイルばね71は、スイッチングエッジ32を元の位置に戻す方向に作用する力を、スイッチングエッジ32に対して加えるように構成してもよい。
【0063】
本実施例では、ねじりコイルばね71の状態は、ラックプレート31のスイッチングエッジ32との接触状態に応じて、コイルとして作用する状態及びコイルとして作用しない状態のいずれかとなる。尚、ラックプレート31のスイッチングエッジ32とねじりコイルばね71との接触状態が、光ディスク1の搬送状態によって変わることを考慮すれば、本実施例では、ねじりコイルばね71の状態は、光ディスク1の搬送状態(つまり、光ディスク1の位置)に応じて、コイルとして作用する状態及びコイルとして作用しない状態のいずれかとなる。
【0064】
尚、図3では、ねじりコイルばね71について説明しているが、ねじりコイルばね72も同様に、ラックプレート31のスイッチングエッジ32との接触状態に応じて、コイルとして作用する状態及びコイルとして作用しない状態のいずれかとなる。
【0065】
再び図2において、ラックプレート31の左側後部にはセレクトカム溝33が形成されている。セレクトカム溝33内にはセレクトプレート37のセレクトピン38が挿入されている。また、ラックプレート31の左側後部には2個の退避制御溝(即ち、第1退避制御溝34及び第2退避制御溝35)が形成されている。ラックプレート31が左方向に移動し且つ第1シフトバー51が前方向に移動したときに、第1シフトバー51の退避制御ピン53が退避制御溝34及び35のいずれかに進入する。
【0066】
セレクトプレート37は、ディスクドライブ10左側に配置されている。セレクトプレート37は、シャーシ11に固定されたモーターブランケット(図示せず)に前後方向に移動可能に支持されている。これにより、セレクトプレート37はシャーシ11に対し前後方向に移動可能である。セレクトプレート37は例えば樹脂材料又は金属材料により形成されている。ディスクドライブ10の左側には、いくつかの部材が上下方向に重なり合っている。セレクトプレート37は、概ね、ラックプレート31、トリガープレート46及び第2シフトバー55の下方に位置し、ピニオン66の上方に位置する。
【0067】
セレクトプレート37の前側上面にはセレクトピン38が設けられている。セレクトピン38の一端側は上向きに伸び、ラックプレート31のセレクトカム溝33に挿入され、他端側はセレクトプレート37に固定されている。セレクトピン38及びセレクトカム溝33は、ラックプレート31の左右方向の移動をセレクトプレート37の前後方向の移動に変換する。具体的には、セレクトピン38及びセレクトカム溝33は、ラックプレート31の左方向の移動をセレクトプレート37の後ろ方向の移動に変換し、ラックプレート31の右方向の移動をセレクトプレート37の前方向の移動に変換する。
【0068】
セレクトプレート37の後ろ側上面には、イジェクトアーム41の回動を規制するストッパー39が設けられている。ストッパー39の一端側は上向きに伸び、他端側はセレクトプレート37の上面に固定されている。
【0069】
イジェクトアーム41は、ローディング時には一端側が光ディスク1の後ろ側周縁に接触することにより光ディスク1の引き込み完了を検出し、イジェクト時には一端側が光ディスク1の後ろ側周縁を押すことにより光ディスク1を前方向に移動させる。イジェクトアーム41は、セレクトプレート37の後部上面上に回動可能に支持されている。イジェクトアーム41は例えば金属材料または樹脂材料により形成されている。イジェクトアーム41は支軸42を中心に回動する。イジェクトアーム41の支軸42はセレクトプレート37の前後方向の移動に伴って前後方向に移動する。イジェクトアーム41の一端側上面には接触部材43が取り付けられている。接触部材43は光ディスク1の周縁と接触する。
【0070】
イジェクトアーム41の他端側には押動制御部44が形成されている。押動制御部44は、イジェクトアーム41が後ろ方向に回動すると前方向に移動し、トリガープレート46のトリガーピン47を押し、これによりトリガープレート46を前方向に押し動かす。
【0071】
トリガープレート46は、セレクトプレート37の後部上方に位置し、シャーシ11に固定されたモーターブランケット(図示せず)に取り付けられている。トリガープレート46は例えば金属材料により形成されている。トリガープレート46は、セレクトプレート37上方でセレクトプレート37に対して前後方向に移動することができる。また、トリガープレート46は、セレクトプレート37に支軸42を介して回動可能に取り付けられたイジェクトアーム41とコイルばね49を介して接続されている。このため、トリガープレート46はセレクトプレート37の前後方向の移動に伴って前後方向に移動する。
【0072】
トリガープレート46は、セレクトプレート37及びイジェクトアーム41の上方に覆い被さるように配置されている。トリガープレート46の前側右縁部に形成されたラック部46Aは、トリガープレート46からセレクトプレート37の右縁近傍を降りてセレクトプレート37の下方に潜り込んでいる。ラック部46Aは、トリガープレート46が前進したときに、セレクトプレート37の下方に配置されたピニオン66と噛み合う。
【0073】
トリガープレート46の後ろ側下面にはトリガーピン47が設けられている。トリガーピン47の一端側は下向きに伸び、他端側はトリガープレート46の下面に固定されている。トリガーピン47の一端側は、イジェクトアーム41の押動制御部44と接触可能な位置まで伸びている。
【0074】
トリガープレート46の前側右縁部には第1伝達ピン48が設けられている。第1伝達ピン48の一端側は右方向に伸び、第1シフトバー51の伝達溝51Aに挿入されている。第1伝達ピン48の他端側はトリガープレート46の右縁部に固定されている。
【0075】
イジェクトアーム41とトリガープレート46との間にはコイルばね49が取り付けられている。コイルばね49は、イジェクトアーム41の他端側を前方向に引っ張っている。
【0076】
第1シフトバー51は、シャーシ11上に前後方向に移動可能に支持されている。第1シフトバー51は例えば樹脂材料により形成される。
【0077】
第1シフトバー51の左側側面には伝達溝51Aが形成されている。伝達溝51Aは、前後方向にシャーシ11の底板に対しほぼ平行に伸張している。伝達溝51Aにはトリガープレート46の第1伝達ピン48が挿入されている。また、第1シフトバー51の前側上面には第2伝達ピン52が設けられている。第2伝達ピン52の一端側は上方に伸び、第2シフトバー55の伝達スロット55Aに挿入されており、他端側は第1シフトバー51の上面に固定されている。また、第1シフトバー51の前側上面には退避制御ピン53が設けられている。退避制御ピン53の一端側はラックプレート31の退避制御溝34及び35と接触可能な位置まで上方に伸び、他端側は第1シフトバー51の上面に固定されている。退避制御ピン53は、ラックプレート31が左方向に移動し、且つ第1シフトバー51が前方向に移動したときに、ラックプレート31の退避制御溝34及び35のいずれかに進入する。退避制御ピン53並びに退避制御溝34及び35は、クランプ時に、ローディングの過程で左方向に移動したラックプレート31を更に左方向に移動させる。
【0078】
第2シフトバー55は、シャーシ11上に左右方向に移動可能に支持されている。第2シフトバー55は例えば樹脂材料により形成される。
【0079】
第2シフトバー55の左側端部には伝達スロット55Aが形成されている。伝達スロット55Aには第1シフトバー51の第2伝達ピン52が挿入されている。第2シフトバー55の後ろ側側面には昇降溝55Bが形成されている。昇降溝55Bは、第2シフトバー55の左右方向の移動によりトラバースメカ61を昇降させるためのカム溝であり、右端が低位置にあり、左端が高位置にある。昇降溝55Bにはトラバースメカ61に取り付けられた昇降ピン64が挿入されている。
【0080】
第2シフトバー55の右側端部にはスイッチングスティック56が形成されている。スイッチングスティック56は左右方向に直線状に伸張している。第2シフトバー55の左右方向の移動によりスイッチングスティック56が左右方向に移動すると、スイッチングスティック56とねじりコイルばね73との接触の有無又は接触の状態が変わる。その結果、ねじりコイルばね73の両端の状態が開放状態から短絡状態へと又は短絡状態から開放状態へと切り替わる。尚、「移動部」の一具体例である第2シフトバー55のスイッチングスティック56と「第2コイル部」の一具体例であるねじりコイルばね73との接触の態様については、図3を用いて説明した、ラックプレート31のスイッチングエッジ32と「第2コイル部」の一具体例であるねじりコイルばね71及び72との接触の態様と同一である。
【0081】
トラバースメカ61には、ターンテーブル62及び光ピックアップ63等が設けられている。モーター65は、ピニオン66を回転駆動すると共に、各ローディングアーム21のローラー23を回転駆動する。ピニオン66は、セレクトプレート37の下方に配置されている。上述したようにセレクトプレート37及びトリガープレート46は前後方向に移動するが、ピニオン66の軸は不動である。ピニオン66は、クランプ動作時にモーター65の動力をトリガープレート46に伝達し、第2シフトバー55、第1シフトバー51及びトラバースメカ61等を移動させる。
【0082】
尚、トリガープレート46、第1シフトバー51、第2シフトバー55、昇降ピン64、モーター65、ピニオン66及びターンテーブル62に対向するようにターンテーブル62の上方に設けられたクランパー(図示せず)などによりクランプ機構が構成されている。
【0083】
ねじりコイルばね71、72及び73は、例えば、ディスクドライブ10の右側に配置されている。但し、ねじりコイルばね71、72及び73は、ディスクドライブ10内のいずれの位置に配置されていてもよい。
【0084】
各ねじりコイルばね71、72及び73は、導線が巻かれた巻き線部分と、当該巻き線部分の両端部である両端部分とを備えている。各ねじりコイルばね71、72及び73の両端部分は、光ディスク1の搬送位置に応じて変化する各ねじりコイルばね71、72及び73とラックプレート31又は第2シフトバー55との接触状態に応じて、開放されたり或いは短絡されたりする。より具体的には、ねじりコイルばね71の両端部分は、光ディスク1の搬送位置に応じて変化するねじりコイルばね71とラックプレート31のスイッチングエッジ32との接触状態に応じて、開放されたり或いは短絡されたりする。ねじりコイルばね72の両端部分は、光ディスク1の搬送位置に応じて変化するねじりコイルばね72とラックプレート31のスイッチングエッジ32との接触状態に応じて、開放されたり或いは短絡されたりする。ねじりコイルばね73の両端部分は、光ディスク1の搬送位置に応じて変化するねじりコイルばね73と第2シフトバー55のスイッチングスティック56との接触状態に応じて、開放されたり或いは短絡されたりする。つまり、各ねじりコイルばね71、72及び73は、その両端部分が開放されているか又は短絡されているかに応じて、いわばオン及びオフという2値の状態を切り替えるスイッチとして作用する。
【0085】
例えば、ねじりコイルばね71、72及び73の少なくとも一つの両端部分は、ラックプレート31又は第2シフトバー55がデフォールトの位置(例えば、光ディスク1がローディングされていない場合の位置)にある場合には、短絡されていてもよい。つまり、ねじりコイルばね71、72及び73の少なくとも一つは、ラックプレート31及び第2シフトバー55がデフォールトの位置にある場合には、コイルとして作用してもよい。一方で、ねじりコイルばね71、72及び73の少なくとも一つの両端部分は、光ディスク1の搬送に伴うラックプレート31及び第2シフトバー55の移動によってねじりコイルばね71、72及び73の少なくとも一つとラックプレート31又は第2シフトバー55との接触状態が変化することで、開放されてもよい。つまり、ねじりコイルばね71、72及び73の少なくとも一つは、光ディスク1が所定位置に搬送されることに伴ってラックプレート31又は第2シフトバー55が所定位置にある場合には、コイルとして作用しなくともよい。
【0086】
或いは、ねじりコイルばね71、72及び73の両端部分の少なくとも一つは、ラックプレート31及び第2シフトバー55がデフォールトの位置(例えば、光ディスク1がローディングされていない場合の位置)にある場合には、開放されていてもよい。つまり、ねじりコイルばね71、72及び73の少なくとも一つは、ラックプレート31又は第2シフトバー55がデフォールトの位置にある場合には、コイルとして作用しなくともよい。一方で、ねじりコイルばね71、72及び73の少なくとも一つの両端部分は、光ディスク1の搬送に伴うラックプレート31及び第2シフトバー55の移動によってねじりコイルばね71、72及び73の少なくとも一つとラックプレート31又は第2シフトバー55との接触状態が変化することで、短絡されてもよい。つまり、ねじりコイルばね71、72及び73の少なくとも一つは、光ディスク1が所定位置に搬送されることに伴ってラックプレート31及び第2シフトバー55が所定位置にある場合には、コイルとして作用してもよい。
【0087】
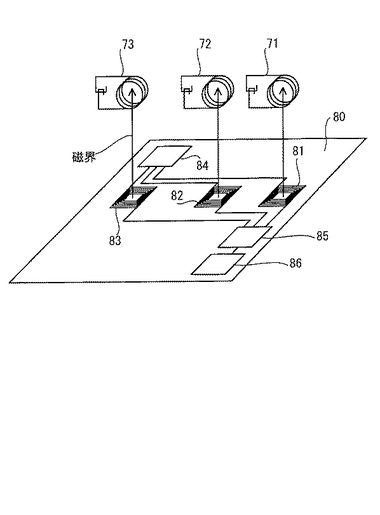
メイン基板80は、ねじりコイルバネ71、72及び73と上下方向に沿って重なる位置に、プリントコイル81、82及び83を備えている。
【0088】
ここで、図4を参照して、メイン基板80の構成を、ねじりコイルばね71、72及び73の配置関係と共に説明する。図4は、メイン基板80の構成を示す平面斜視図である。
【0089】
図4に示すように、メイン基板80上には、プリントコイル81、82及び83と、電源回路84と、電圧検出回路85と、位置検出回路86とが形成されている。
【0090】
プリントコイル81は、メイン基板80にパターニングされた平面状のコイルであって、上ねじりコイルばね71と上下方向に沿って重なる位置に形成される。より具体的には、プリントコイル81は、電源回路84から供給される電流によってプリントコイル81から発生する磁界がねじりコイルばね71(例えば、ねじりコイルばね71の巻き線部分)を通過するような位置に形成される。更に、プリントコイル81は、ねじりコイルバネ71から発生する磁界が、プリントコイル81(例えば、プリントコイル81の巻き線部分)を通過するような位置に形成される。
【0091】
プリントコイル82は、メイン基板80にパターニングされた平面状のコイルであって、ねじりコイルばね72と上下方向に沿って重なる位置に形成される。より具体的には、プリントコイル82は、電源回路84から供給される電流によってプリントコイル82から発生する磁界がねじりコイルばね72(例えば、ねじりコイルばね72の巻き線部分)を通過するような位置に形成される。更に、プリントコイル82は、ねじりコイルバネ72から発生する磁界が、プリントコイル82(例えば、プリントコイル82の巻き線部分)を通過するような位置に形成される。
【0092】
プリントコイル83は、メイン基板80にパターニングされた平面状のコイルであって、ねじりコイルばね73と上下方向に沿って重なる位置に形成される。より具体的には、プリントコイル83は、電源回路84から供給される電流によってプリントコイル83から発生する磁界がねじりコイルばね73(例えば、ねじりコイルばね73の巻き線部分)を通過するような位置に形成される。更に、プリントコイル83は、ねじりコイルバネ73から発生する磁界が、プリントコイル83(例えば、プリントコイル83の巻き線部分)を通過するような位置に形成される。
【0093】
電源回路84は、プリントコイル81、82及び83の夫々に電流を供給する。その結果、プリントコイル81、82及び83の夫々は、磁界を発生させる。
【0094】
電圧検出回路85は、プリントコイル81、82及び83の夫々の端子間電圧を検出する。
【0095】
位置検出回路86は、電圧検出回路85により検出されたプリントコイル81、82及び83の夫々の端子間電圧に基づいて、光ディスク1の位置を検出する。言い換えれば、位置検出回路86は、電圧検出回路85より検出されたプリントコイル81、82及び83の夫々の端子間電圧に基づいて、光ディスク1の現在の搬送状態を検出する。その結果、メイン基板80上に形成される不図示の駆動制御回路は、位置検出回路86によって検出された光ディスク1の位置に応じて、ローディング時、クランプ時およびイジェクト時におけるモーター65の駆動を制御する。
【0096】
(3)位置検出回路による位置検出の手法
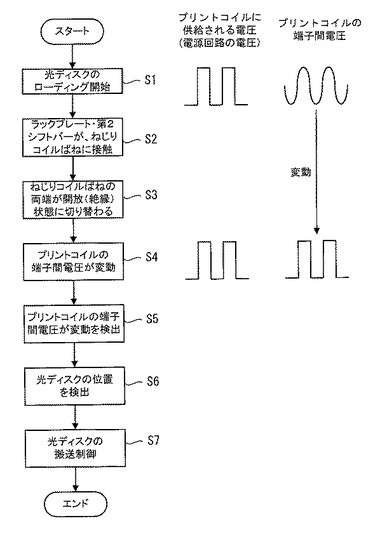
続いて、図5を参照して、位置検出回路86による位置検出の手法について説明する。図5は、位置検出回路86による位置検出の手法の流れを示すフローチャートである。
【0097】
図5に示すように、ディスクドライブ10に対する光ディスク1のローディングが開始される(ステップS1)。尚、以下の説明では、説明の簡略化のため、光ディスク1のローディングが開始される前の時点では、ねじりコイルばね71、72及び73の夫々の両端部分の状態は短絡状態にあるものとする。つまり、光ディスク1のローディングが開始される時点では、ねじりコイルばね71、72及び73の夫々は、コイルとして作用するものとする。
【0098】
この場合、ねじりコイルばね71がコイルとして作用するため、プリントコイル81は、コイルとして作用するねじりコイルばね71の影響を受ける。その結果、図5の右側に示すように、プリントコイル81の端子間電圧は、電源回路84からプリントコイル81に供給される電圧とは異なるものになる。同様に、ねじりコイルばね72がコイルとして作用するため、プリントコイル82は、コイルとして作用するねじりコイルばね72の影響を受ける。その結果、図5の右側に示すように、プリントコイル82の端子間電圧は、電源回路84からプリントコイル82に供給される電圧とは異なるものになる。同様に、ねじりコイルばね73がコイルとして作用するため、プリントコイル83は、コイルとして作用するねじりコイルばね73の影響を受ける。その結果、図5の右側に示すように、プリントコイル83の端子間電圧は、電源回路84からプリントコイル83に供給される電圧とは異なるものになる。
【0099】
その後、光ディスク1の搬送が進むにつれて、ラックプレート31や第2シフトバー55が移動する。その結果、ラックプレート31のスイッチングエッジ32がねじりコイルバネ71に接触する(ステップS2)。或いは、ラックプレート31のスイッチングエッジ32がねじりコイルバネ72に接触する(ステップS2)。或いは、第2シフトバー55のスイッチングスティック56がねじりコイルバネ73に接触する(ステップS2)。
【0100】
その結果、ねじりコイルばね71の両端部分の状態が、短絡状態から開放状態へと切り替えられる(ステップS3)。或いは、ねじりコイルばね72の両端部分の状態が、短絡状態から開放状態へと切り替えられる(ステップS3)。或いは、ねじりコイルばね73の両端部分の状態が、短絡状態から開放状態へと切り替えられる(ステップS3)。
【0101】
この場合、ねじりコイルばね71はコイルとして作用しなくなるため、プリントコイル81は、ねじりコイルばね71の影響を受けなくなる。その結果、光ディスク1が開始される前の時点と比較して、プリントコイル81の端子間電圧が変動する(ステップS4)。具体的には、図5の右側に示すように、プリントコイル81の端子間電圧は、電源回路84からプリントコイル81に供給される電圧と同じになる。或いは、ねじりコイルばね72はコイルとして作用しなくなるため、プリントコイル82は、ねじりコイルばね72の影響を受けなくなる。その結果、光ディスク1が開始される前の時点と比較して、プリントコイル82の端子間電圧が変動する(ステップS4)。具体的には、図5の右側に示すように、プリントコイル82の端子間電圧は、電源回路84からプリントコイル82に供給される電圧と同じになる。或いは、ねじりコイルばね73はコイルとして作用しなくなるため、プリントコイル83は、ねじりコイルばね73の影響を受けなくなる。その結果、光ディスク1が開始される前の時点と比較して、プリントコイル83の端子間電圧が変動する(ステップS4)。具体的には、図5の右側に示すように、プリントコイル83の端子間電圧は、電源回路84からプリントコイル83に供給される電圧と同じになる。
【0102】
このようなプリントコイル81、82及び83の端子間電圧の変動は、電圧検出回路85によって検出される(ステップS5)。より具体的には、電圧検出回路85は、(i)プリントコイル81の端子間電圧が変動しているか否か、(ii)プリントコイル82の端子間電圧が変動しているか否か、及び(iii)プリントコイル83の端子間電圧が変動しているか否かを検出する。電圧検出回路85は、検出結果を、位置検出回路86に対して通知する。
【0103】
その後、位置検出回路86は、電圧検出回路85におけるプリントコイル81、82及び83の夫々の端子間電圧の検出結果に基づいて、光ディスク1の現在の搬送状態(つまり、光ディスク1の現在の位置)を検出する。例えば、位置検出回路86は、(i)プリントコイル81の端子間電圧が変動しているか否か、(ii)プリントコイル82の端子間電圧が変動しているか否か、及び(iii)プリントコイル83の端子間電圧が変動しているか否かの検出結果の組み合わせに応じて、光ディスク1の搬送状態(つまり、光ディスク1の現在の位置)を検出する。
【0104】
(4)光ディスク1の搬送動作
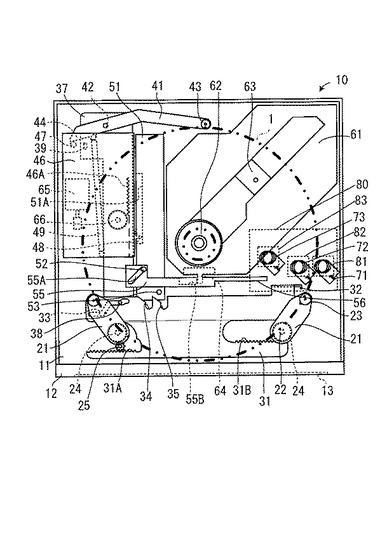
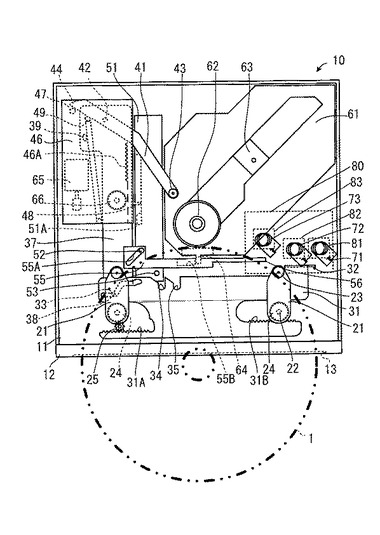
続いて、図6から図9を参照して、光ディスク1の搬送動作の過程を、時系列に沿って具体的に説明する。図6から図9の夫々は、光ディスク1の搬送動作の一過程を示す平面図である。
【0105】
光ディスク1がディスクドライブ10に挿入されたとき、ディスクドライブ10は例えば次のように動作する。尚、以下の説明では、光ディスク1がディスクドライブ10にローディングされる前の時点では、図2に示すように、ラックプレート31のスイッチングエッジ32がねじりコイルバネ71及び72に接触しており、第2シフトバー55のスイッチングスティック56がねじりコイルバネ73に接触していないものとする。つまり、光ディスク1がディスクドライブ10にローディングされる前の時点では、ねじりコイルバネ71及び72の夫々の両端部分が開放状態にあり、ねじりコイルバネ73の両端部分が短絡状態にあるものとする。
【0106】
まず、上述した図2に示すように、光ディスク1がディスクドライブ10に挿入されると、光ディスク1の周縁が各ローディングアーム21のローラー23に接触し、各ローディングアーム21を後ろ方向に押す。これにより、各ローディングアーム21が開く。各ローディングアーム21が開くと、ギア24、ピニオン25並びにラック部31A及び31Bの噛合により、ラックプレート31が左方向に移動する。ラックプレート31が移動すると、スイッチングエッジ32がねじりコイルばね71から離れる。つまり、ねじりコイルバネ71の両端部分の状態が開放状態から短絡状態へと切り替わる。その結果、プリントコイル81の端子間電圧が変動すると共に、位置検出回路86によって光ディスク1のローディングが開始されたこと(言い換えれば、例えば、光ディスク1がローディング開始位置にあること)が検出される。これにより、不図示の駆動制御回路はモーター65の駆動を開始させる。これにより、各ローディングアーム21のローラー23が回転を始め、ローラー23の回転により光ディスク1がディスクドライブ10の内部へ引き込まれる。
【0107】
その後、図6に示すように、光ディスク1が引き込まれ、光ディスク1が後ろ方向に搬送されるに従って、各ローディングアーム21が更に開き、ラックプレート31が左方向に更に移動する。そして、スイッチングエッジ32がねじりコイルばね72から離れる。つまり、ねじりコイルバネ72の両端部分の状態が開放状態から短絡状態へと切り替わる。従って、プリントコイル82の端子間電圧が変動すると共に、位置検出回路86によって光ディスク1のローディングが順調に進んでいること(言い換えれば、例えば、光ディスク1がローディング中途位置にあること)が検出される。この場合、不図示の駆動制御回路は、このときのプリントコイル82の端子間電圧の変動により動作を変更せず、それゆえ、モーター65は回転を続け、光ディスク1の搬送が続く。
【0108】
光ディスク1の搬送が続くと、やがて光ディスク1の後ろ側周縁がイジェクトアーム41の接触部材43に接触し、イジェクトアーム41の一端側を後退させる。イジェクトアーム41の一端側が後退すると、イジェクトアーム41の他端側が前進し、イジェクトアーム41の押動制御部44がトリガーピン47を押し、トリガープレート46を前進させる。
【0109】
その後、図7に示すように、光ディスク1がクランプ位置まで搬送され、これによりイジェクトアーム41の一端側が所定の位置まで後退すると、押動制御部44の前進によりトリガープレート46が所定の位置まで前進する。トリガープレート46が所定の位置まで前進すると、トリガープレート46のラック部46Aがピニオン66と噛み合う。ピニオン66は、モーター65が駆動している間は常に回転している。トリガープレート46のラック部46Aがピニオン66と噛み合うと、ピニオン66の回転により、トリガープレート46が更に前進する。即ち、トリガープレート46のラック部46Aがピニオン66と噛み合った瞬間、トリガープレート46を前進させる動力源が、押動制御部44の押圧力からピニオン66の回転に切り替わる。
【0110】
その後、図8に示すように、トリガープレート46が前進すると、トリガープレート46の伝達ピン48により第1シフトバー51も前進する。第1シフトバー51が前進すると、第1シフトバー51の伝達ピン52により第2シフトバー55が右方向に移動する。第2シフトバー55が右方向に移動すると、スイッチングスティック56も右方向に移動する。これにより、スイッチングスティック56の右端がねじりコイルばね73と接触する。つまり、ねじりコイルバネ73の両端部分の状態が短絡状態から開放状態へと切り替わる。その結果、プリントコイル83の端子間電圧が変動すると共に、位置検出回路86によって光ディスク1のローディングが完了したこと(言い換えれば、例えば、光ディスク1がクランプ位置にあること)が検出される。これにより、不図示の駆動制御回路は、モーター65の駆動を停止する。これにより、各ローディングアーム21のローラー23の回転及びピニオン66の回転が止まる。
【0111】
また、第2シフトバー55が右方向に移動すると、第2シフトバー55の昇降溝55Bに挿入された昇降ピン64が持ち上がり、これに伴ってトラバースメカ61が上昇する。これにより、光ディスク1がターンテーブル62とターンテーブル62の上方に配置されたクランパー(図示せず)との間にクランプされる。
【0112】
また、このとき、第1シフトバー51の前進により、第1シフトバー51の退避制御ピン53がラックプレート31の第2退避制御溝35に進入する。そして、退避制御ピン53が第2退避制御溝35の傾斜縁を押すことにより、ラックプレート31が左方向にさらに移動する。これにより、各ローディングアーム21が更に開き、各ローディングアーム21のローラー23が光ディスク1の周縁から離れ、各ローディングアーム21のローラー23と光ディスク1の周縁との間に適切なクリアランスが確保される。
【0113】
更に、退避制御ピン53の第2退避制御溝35への進入によりラックプレート31が左方向に移動すると、セレクトプレート37のセレクトピン38が、セレクトカム溝33の右端部に形成された溝部により後ろ方向にわずかに押され、セレクトプレート37が小さく後退する。セレクトプレート37が小さく後退すると、イジェクトアーム41の支軸42も小さく後退する。このとき、イジェクトアーム41の他端側は、トリガープレート46の前進により伸張したコイルばね49により引っ張られている。このため、イジェクトアーム41は反時計回りに回動し、イジェクトアーム41の一端側が後退し、イジェクトアーム41の接触部材43が光ディスク1の周縁から離れる。これにより、イジェクトアーム41の接触部材43と光ディスク1の周縁との間に適切なクリアランスが確保される。
【0114】
図8に示すように、光ディスク1のクランプが完了し、イジェクトアーム41及び各ローディングアーム21の退避が完了すると、図示しないスピンドルモーターが駆動を開始し、ターンテーブル62が回転し、光ディスク1が回転する。そして、光ピックアップ63により光ディスク1に対し、情報の読み取りまたは記録が行われる。
【0115】
光ディスク1に対する情報の読み取りまたは書き込みが終了し、光ディスク1をイジェクトする旨の指示が与えられたときには、この指示に応じてモーター65が始動する。このときのモーター65の回転方向は、ローディング時とは逆の方向である。そして、ピニオン66が逆回転を始め、これにより、第1シフトバー51及びトリガープレート46が後退する。更に、第2シフトバー55が左方向に移動し、スイッチングスティック56が左方向に移動し、スイッチングスティック56がねじりコイルばね73から離れる。つまり、ねじりコイルバネ73の両端部分の状態が開放状態から短絡状態へと切り替わる。その結果、プリントコイル83の端子間電圧が変動すると共に、位置検出回路86によって光ディスク1のイジェクトが開始されたこと(言い換えれば、例えば、光ディスク1がイジェクト開始位置にあること)が検出される。更に、トラバースメカ61が下降する。更に、第1シフトバー51の退避制御ピン53がラックプレート31の第2退避制御溝35から退出し、ラックプレート31が図示しないばねの力により右方向に移動する。これにより各ローディングアーム21が閉じ、各ローディングアーム21のローラー23が光ディスク1の周縁に接触する。更に、トリガープレート46の後退により、イジェクトアーム41が時計回りに回動し、イジェクトアーム41の一端側が前進し、接触部材43が光ディスク1の周縁に接触する。更に、モーター65の回転により各ローラー23が逆回転を開始する。
【0116】
そして、光ディスク1は、イジェクトアーム41による押され、さらに各ローディングアーム21のローラー23の逆回転により前方向に搬送される。
【0117】
その後、図9に示すように、光ディスク1が前方向に搬送されるにしたがって、各ローディングアーム21の先端側が閉じ、ラックプレート31が右方向に移動する。そして、ラックプレート31のスイッチングエッジ32がねじりコイルばね72に接触する。つまり、ねじりコイルバネ72の両端部分の状態が短絡状態から開放状態へと切り替わる。その結果、プリントコイル82の端子間電圧が変動すると共に、位置検出回路86によって光ディスク1のイジェクトが完了したこと(言い換えれば、例えば、光ディスク1がイジェクト完了位置にあること)が検出される。これにより、不図示の駆動制御回路はモーター65の駆動を停止させる。これにより、各ローディングアーム21のローラー23の回転が停止し、光ディスク1がイジェクト完了位置に停止する。
【0118】
以上説明したように、本実施例のディスクドライブ10によれば、ねじりコイルばね71、72及び73と電圧検出回路85若しくは位置検出回路86とを電気的に接続しなくとも、ねじりコイルばね71、72及び73の状態を検出することができる。つまり、本実施例のディスクドライブ10によれば、2値的に定まるねじりコイルバネ71、72及び73の状態を、ねじりコイルバネ71、72及び73と電気的な配線を介して接続されていないプリントコイル81、82及び83の端子間電圧を検出することで判定することができる。従って、例えば、メイン基板80上に電圧検出回路85若しくは位置検出回路86を配置し且つメイン基板80以外の箇所にねじりコイルばね71、72及び73を配置する場合であっても、電圧検出回路85若しくは位置検出回路86とねじりコイルばね71、72及び73とを接続する電気的な配線を設けなくともよくなる。つまり、ねじりコイルばね71、72及び73をいわゆるワイヤレススイッチとして用いることができる。
【0119】
仮に、ねじりコイルばね71、72及び73に代えて、電気的なオン信号(言い換えれば、接触信号)及びオフ信号(言い換えれば、非接触信号)を出力することでスイッチングエッジ32やスイッチングスティック56との接触状態を電圧検出回路85若しくは位置検出回路86に伝えるメカニカルスイッチを用いる比較例のディスクドライブであれば、メカニカルスイッチと電圧検出回路85若しくは位置検出回路86とは、電気的な配線で接続する必要がある。しかるに、本実施例のディスクドライブ10によれば、このような電気的な配線を設けなくともよいため、比較例のディスクドライブと比較して、ディスクドライブ10を構成する構成部品の数を減らすことができ、コスト増加を抑えることができる。
【0120】
そして、ねじりコイルばね71、72及び73の状態が光ディスク1の位置に応じて変わることを考慮すれば、本実施例のディスクドライブ10によれば、ねじりコイルばね71、72及び73と電圧検出回路85若しくは位置検出回路86とを電気的に接続しなくとも、光ディスク1の位置を好適に検出することができる。
【0121】
更に、本実施例のディスクドライブ10によれば、電圧検出回路85若しくは位置検出回路86が配置されるメイン基板80の外部に電気的な配線を設けなくともよくなる。このため、電気的な配線の断線による検出精度の悪化ないしは検出動作の技術的な不具合が生ずることは殆ど又は全くなくなる。従って、比較例のディスクドライブと比較して、光ディスク1の位置の検出の精度又は信頼性を相対的に高めることができる。
【0122】
加えて、本実施例のディスクドライブ10によれば、比較例のディスクドライブと比較して、相対的に重いメカニカルスイッチ及び電気的な配線に代えて、相対的に軽いねじりコイルばね71、72及び73を用いて光ディスク1の位置を検出することができる。従って、比較例のディスクドライブと比較して、重量が相対的に軽いディスクドライブ10を実現することができる。
【0123】
加えて、本実施例のディスクドライブ10によれば、比較例のディスクドライブと比較して、相対的に厚いメカニカルスイッチ及び電気的な配線に代えて、相対的に薄いプリントコイル81、82及び83を用いて光ディスク1の位置を検出することができる。従って、比較例のディスクドライブと比較して、相対的に薄いディスクドライブ10を実現することができる。
【0124】
加えて、本実施例のディスクドライブ10によれば、ねじりコイルばね71、72及び73がスイッチングエッジ32又はスイッチングスティック56に接触していない場合には、ねじりコイルばね71、72及び73の両端部分の状態を短絡状態に設定することができる。つまり、ねじりコイルばね71、72及び73の初期状態を短絡状態に設定することができる。このため、スイッチングエッジ32又はスイッチングスティック56とねじりコイルばね71、72又は73の接触によって、ねじりコイルばね71、72又は73の両端部分が離されることになる。この場合、ねじりコイルばね71、72又は73の両端部分が少し移動する程度にスイッチングエッジ32又はスイッチングスティック56がねじりコイルばね71、72又は73に接触すれば、ねじりコイルばね71、72又は73の両端部分の状態が開放状態へと切り替わる。従って、スイッチングエッジ32又はスイッチングスティック56とねじりコイルばね71、72又は73との接触の程度の強弱ないしはばらつきの影響を殆ど又は全く受けることなく、ねじりコイルばね71、72又は73の両端部分の状態を短絡状態から開放状態へと切り替えることができる。従って、スイッチングエッジ32又はスイッチングスティック56の移動を左右する光ディスク1の位置の検出精度を相対的に上げることができる。
【0125】
加えて、本実施例のディスクドライブ10によれば、ねじりコイルばね71、72及び73の両端部分は、相互に連結可能なカギ形状を有していてもよい。従って、ねじりコイルばね71、72及び73の両端部分の間隔が広がってしまう技術的な不都合を好適に抑制することができる。また、ねじりコイルばね71、72及び73を開放状態にするためには、カギ形状の連結を解消すればよいため、比較的容易に、ねじりコイルばね71、72及び73の両端部の状態を短絡状態から開放状態へと切り替えることができる。
【0126】
加えて、本実施例のディスクドライブ10によれば、ねじりコイルばね71又は72がスイッチングエッジ32の応力によってたわんでいる(つまり、変形している)場合には、ねじりコイルばね71又は72は、スイッチングエッジ32を元の位置に戻す方向に作用する力を、スイッチングエッジ32に対して加えるように構成してもよい。同様に、本実施例のディスクドライブ10によれば、ねじりコイルばね73がスイッチングスティック56の応力によってたわんでいる(つまり、変形している)場合には、ねじりコイルばね73は、スイッチングスティック56を元の位置に戻す方向に作用する力を、スイッチングスティック56に対して加えるように構成してもよい。このように構成すれば、ねじりコイルばね71、72及び73からの応力を利用して、スイッチングエッジ32(つまり、ラックプレート31)及びスイッチングスティック56(つまり、第2シフトバー55)を元の位置に戻すことができる。従って、光ディスク1の搬送動作を比較的スムーズに行うことができる。
【0127】
また、本発明は、請求の範囲及び明細書全体から読み取るこのできる発明の要旨又は思想に反しない範囲で適宜変更可能であり、そのような変更を伴う位置検出装置及び電子機器もまた本発明の技術思想に含まれる。
【符号の説明】
【0128】
1 光ディスク
10 ディスクドライブ
31 ラックプレート
32 スイッチングエッジ
55 第2シフトバー
56 スイッチングスティック
71、72、73 ねじりコイルバネ
80 メイン基板
81、82、83 プリントコイル
85 電圧検出回路
86 位置検出回路
【技術分野】
【0001】
本発明は、例えば対象物の位置を検出する位置検出装置及びこのような位置検出装置を備える電子機器の技術分野に関する。
【背景技術】
【0002】
DVD(Digital Versatile Disc)や、CD(Compact Disc)、ブルーレイディスク(BD:Blu-ray Disc)等の光ディスクに対し、情報の記録又は再生を行うディスクドライブがある。ディスクドライブは、ディスクプレーヤや、ディスクレコーダや、オーディオシステムや、パーソナルコンピュータや、カーナビゲーションシステム等の様々な装置に用いられている。このようなディスクドライブは、光ディスクを着脱することができる。光ディスクを着脱する方式として、スロットイン方式や、ドロアー方式や、トレー方式等がある。
【0003】
スロットイン方式のディスクドライブにおけるローディング動作は、例えば次の通りである。ユーザは、光ディスクの端部をディスクスロットに挿入し、光ディスクをディスクドライブの内部に向けて軽く押し込む。すると、ディスクドライブは、例えばローディングアームなどのローディング機構によって光ディスクをディスクドライブの内部に引き込み、光ディスクの中心がターンテーブル上に位置するまで光ディスクを搬送する。続いて、ディスクドライブは、光ディスクをターンテーブル上に固定(クランプ)する。
【0004】
スロットイン方式のディスクドライブにおけるイジェクト動作は、例えば次の通りである。ディスクドライブ内のターンテーブル上にクランプされた光ディスクをイジェクト(排出)する旨の指示が発せられると、当該指示に応じて、ディスクドライブは、光ディスクのクランプを解除する。続いて、ディスクドライブは、例えばイジェクトアームなどのイジェクト機構により、光ディスクを、ディスクスロットを通してディスクドライブの外側へ押し出す。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】平5−128695号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
以上のような光ディスクの搬送制御(つまり、ローディング及びイジェクトの制御)は、光ディスクの位置の検出結果に応じて光ディスクの搬送の開始及び停止のタイミング等を決定することで行われる。光ディスクの位置を検出する方法として、例えば以下の方法が考えられる。まず、搬送される光ディスクと接触することで移動するレバーが光ディスクの搬送経路上に設けられ、且つ当該レバーと接触可能な位置に、当該レバーと接触しているか否かに応じてオン・オフが切り替わるメカニカルスイッチが設けられる。メカニカルスイッチの状態(つまり、レバーと接触することでメカニカルスイッチがオンになっている状態又はレバーと接触しないことでメカニカルスイッチがオフになっている状態)は、メイン基板上の検出回路に対して電気的に(つまり、電気信号として)伝えられる。その結果、検出回路は、メカニカルスイッチの状態に応じて、光ディスクの通過の有無(或いは、光ディスクの位置)を検出する。
【0007】
しかしながら、ディスクドライブのサイズの制約ないしはレイアウトの制約により、メカニカルスイッチと検出回路とを同一のメイン基板上に設けることができない場合がある。この場合、メカニカルスイッチと検出回路(或いは、メイン基板)とは、メイン基板の外部に設けられた電気的な配線(例えば、FPC:Flexible Print Circuit)を介して接続される。しかしながら、メイン基板の外部に電気的な配線が設けられるがゆえに、ディスクドライブを構成する部品の数が相対的に増えてしまい、全体のコストが増大するという技術的な問題点が生ずる。また、本体の金属部材によってFPCが断線しないように、装置外側を迂回させるようにレイアウトする必要があった。そのため、大型のFPCが必要であり、全体のコスト増大の要因となっていた。また、組み立て時の作業が煩雑になるという問題点が生じていた。
【0008】
本発明が解決しようとする課題には上記のようなものが一例として挙げられる。本発明は、構成部品の数を相対的に減らすことが可能な位置検出装置及び電子機器を提供することを課題とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、位置検出装置は、磁界を発生させる第1コイル部と、前記第1コイル部により発生させられる磁界が到達する位置にあり、且つ両端部の状態を開放状態から短絡状態へ及び短絡状態から開放状態へと切り替え可能な弾性を有する第2コイル部と、位置検出の対象となる対象物の移動に伴って移動すると共に、当該移動に伴う前記第2コイル部との接触によって前記第2コイル部を弾性変形させることで前記第2コイル部の両端部の状態を開放状態から短絡状態へと又は短絡状態から開放状態へと切り替える移動部と、前記第1コイル部の両端の電圧の変化に基づいて、前記対象物の位置を検出する検出部とを備える。
【0010】
上記課題を解決するために、電子機器は、上述した位置検出装置を備える。
【図面の簡単な説明】
【0011】
【図1】ディスクドライブの外観を示す斜視図である。
【図2】ディスクドライブの内部構成を示す平面図である。
【図3】ねじりコイルばねの両端部分の状態が開放状態から短絡状態へと又は短絡状態から開放状態へと切り替わる態様を示す平面図である。
【図4】メイン基板の構成を示す平面斜視図である。
【図5】位置検出回路による位置検出の手法の流れを示すフローチャートである。
【図6】光ディスクの搬送動作の一過程を示す平面図である。
【図7】光ディスクの搬送動作の一過程を示す平面図である。
【図8】光ディスクの搬送動作の一過程を示す平面図である。
【図9】光ディスクの搬送動作の一過程を示す平面図である。
【発明を実施するための形態】
【0012】
以下、位置検出装置及び電子機器の実施形態について順に説明する。
【0013】
(位置検出装置の実施形態)
本実施形態の位置検出装置は、磁界を発生させる第1コイル部と、前記第1コイル部により発生させられる磁界が到達する位置にあり、且つ両端部の状態を開放状態から短絡状態へ及び短絡状態から開放状態へと切り替え可能な弾性を有する第2コイル部と、位置検出の対象となる対象物の移動に伴って移動すると共に、当該移動に伴う前記第2コイル部との接触によって前記第2コイル部を弾性変形させることで前記第2コイル部の両端部の状態を開放状態から短絡状態へと又は短絡状態から開放状態へと切り替える移動部と、前記第1コイル部の両端の電圧の変化に基づいて、前記対象物の位置を検出する検出部とを備える。
【0014】
本実施形態の位置検出装置によれば、第1コイル部は、磁界を発生させる。例えば、第1コイル部に対して電源から電流が供給されることで第1コイル部に電流が流れ、その結果、第1コイル部から磁界が発生する。
【0015】
第2コイル部は、第1コイル部から発生した磁界が到達する位置に配置される。言い換えれば、第2コイル部は、第1コイル部を流れる電流によって形成される磁場内に(又は、当該磁場の影響を受ける範囲)に配置される。第2コイル部は弾性を有している。第2コイル部が有している弾性によって、第2コイル部の両端部(例えば、第2コイル部のうちの巻き線部から延びる2つの導線部)の状態は、開放状態(言い換えれば、非接続状態ないしは絶縁状態)から短絡状態(言い換えれば、接続状態ないしは導通状態)へと切り替えられる。同様に、第2コイル部が有している弾性によって、第2コイル部の両端部の状態は、短絡状態から開放状態へと切り替えられる。
【0016】
移動部は、本実施形態の位置検出装置による位置検出の対象となる対象物の移動に伴って移動する。例えば、移動部は、対象物に直接接触することで移動していてもよい。この場合、対象物の移動に伴って対象物と移動部とが接触し、その結果、移動部は、対象物との接触によって移動部に加えられる力(言い換えれば、対象物から移動部に直接的に加えられる力)によって移動してもよい。或いは、例えば、移動部は、対象物との間に所定の介在構造物を介在させていてもよい。この場合、対象物の移動に伴って対象物と介在構造物が接触し、その結果、介在構造物は、対象物との接触によって介在構造物に直接加えられる力によって移動してもよい。その結果、介在構造物の移動に伴って介在構造物と移動部が接触し、その結果、移動部は、介在構造物との接触によって移動部に加えられる力(言い換えれば、対象物から移動部に間接的に加えられる力)によって移動してもよい。
【0017】
このような対象物の移動に伴って移動する移動部との接触状態に応じて、第2コイル部の両端部の状態の切り替えが行われる。具体的には、移動部が第2コイル部と接触することで、第2コイル部は、自身の弾性に応じて弾性変形する。その結果、弾性変形前の第2コイル部の両端部の状態が短絡状態である場合には、第2コイル部の両端部の状態は、短絡状態から開放状態へと切り替えられる。或いは、弾性変形前の第2コイル部の両端部の状態が開放状態である場合には、第2コイル部の両端部の状態は、開放状態から短絡状態へと切り替えられる。
【0018】
尚、移動部と第2コイル部との接触によって第2コイル部の両端部の状態が切り替わることを考慮すれば、移動部は、第2コイル部の両端部の状態を変えることができる程度の力を第2コイル部に加えることができるように移動することが好ましい。言い換えれば、移動部は、第2コイル部の両端部の状態を変えることができる程度の力を第2コイル部に加えることができるように、対象物の移動に伴って移動することが好ましい。
【0019】
第2コイル部の両端部の状態が開放状態である場合には、第2コイル部は、いわゆるコイル(言い換えれば、インダクタ)としては作用しない。一方で、第2コイル部の両端部の状態が短絡状態である場合には、第2コイル部は、いわゆるコイル(言い換えれば、インダクタ)として作用する。従って、第2コイル部がコイルとして作用する状態からコイルとして作用しない状態に切り替わる又は第2コイル部がコイルとして作用しない状態からコイルとして作用する状態に切り替わることで、第1コイル部が第2コイル部の影響を受けたり或いは受けなかったりする。その結果、第1コイル部が発生する磁界(或いは、第1コイル部の両端の電圧(つまり、端子間電圧))が変化する。
【0020】
このような第1コイル部の両端の電圧の変化は、第2コイル部がコイルとして作用するか否かに応じて決まる。第2コイル部がコイルとして作用するか否かは、第2コイル部の両端部の状態が開放状態であるか又は短絡状態であるかに応じて決まる。第2コイル部の両端部の状態が開放状態であるか又は短絡状態であるかは、移動部が第2コイル部に接触しているか否かに応じて決まる。移動部が第2コイル部に接触しているか否かは、対象物の移動の程度によって決まる。従って、検出部は、第1コイル部の両端の電圧の変化を検出することで、対象物の移動の程度(言い換えれば、対象物の位置)を検出することができる。
【0021】
本実施形態の位置検出装置によれば、第2コイル部と検出部とを電気的に接続しなくとも、第2コイル部の状態(言い換えれば、移動部の状態であり、更に言い換えれば、対象物の移動状態ないしは位置)を検出することができる。つまり、本実施形態の検出部は、2値的に定まる第2コイル部の状態を、第2コイル部の状態による影響を受ける第1コイル部の両端の電圧の変化を検出することで判定することができる。従って、例えば、メイン基板上に検出部を配置し且つメイン基板とは離れた位置に第2コイル部を配置する場合であっても、検出部と第2コイル部とを接続する電気的な配線を設けなくともよくなる。つまり、第2コイル部をいわゆるワイヤレススイッチとして用いることができる。
【0022】
仮に、第2コイル部に代えて、電気的なオン信号(言い換えれば、接触信号)及びオフ信号(言い換えれば、非接触信号)を用いて移動部との接触状態を検出部に伝えるメカニカルスイッチを用いる比較例の位置検出装置であれば、メカニカルスイッチと検出部とは、電気的な配線で接続される必要がある。しかるに、本実施形態の位置検出装置によれば、このような電気的な配線を設けなくともよいため、比較例の位置検出装置と比較して、位置検出装置を構成する構成部品の数を減らすことができ、コスト増加を抑えることができる。
【0023】
更に、本実施形態の位置検出装置によれば、検出部が配置されるメイン基板の外部に電気的な配線を設けなくともよくなるため、電気的な配線の断線による検出精度の悪化ないしは検出動作の技術的な不具合が生ずることは殆ど又は全くなくなる。従って、比較例の位置検出装置と比較して、信頼性の高い位置検出装置を実現することができる。
【0024】
加えて、本実施形態の位置検出装置によれば、比較例の位置検出装置と比較して、相対的に重いメカニカルスイッチ及び電気的な配線に代えて、相対的に軽いコイルを用いて対象物の位置を検出することができる。従って、比較例の位置検出装置と比較して、重量が相対的に軽い位置検出装置を実現することができる。このような重量の利点は、位置検出装置が搭載される電子機器の小型化及び軽量化の要請が強い技術分野において特に有効である。
【0025】
本実施形態の位置検出装置の一の態様は、前記移動部が前記第2コイル部に接触していない場合には、前記第2コイル部の両端部の状態は短絡状態であり、前記第2コイル部と前記移動部との接触によって前記第2コイル部が弾性変形することで、前記第2コイル部の両端部の状態が短絡状態から開放状態に切り替わる。
【0026】
この態様によれば、移動部と第2コイル部の接触によって、初期状態では短絡状態にあった第2コイル部の両端部の状態が開放状態へと切り替えられる。つまり、移動部と第2コイル部の接触によって、第2コイル部の両端部が離される。この場合、第2コイル部の両端部が少しでも移動する程度に移動部が第2コイル部に接触すれば、第2コイル部の両端部の状態が開放状態へと切り替わる。従って、移動部と第2コイル部との接触の程度の強弱ないしはばらつきの影響を殆ど又は全く受けることなく、第2コイル部の両端部の状態を短絡状態から開放状態へと切り替えることができる。従って、移動部の移動を左右する対象物の位置の検出精度を相対的に上げることができる。
【0027】
尚、対象物の位置を検出するという観点から見れば、移動部が第2コイル部に接触していない場合には、第2コイル部の両端部の状態は開放状態にあり、第2コイル部と移動部との接触によって第2コイル部が弾性変形することで、第2コイル部の両端部の状態が開放状態から短絡状態に切り替えられてもよい。但し、この場合、第2コイル部の両端部の開放状態のばらつき(例えば、両端部の間の間隔の大きさのばらつき等)によっては、移動部が第2コイル部に接触したとしても、第2コイル部の両端部の状態が短絡状態へと切り替わらない場合が生じかねない。例えば、第2コイル部の両端部間の間隔が相対的に大きすぎる場合には、移動部が第2コイル部に接触したとしても、その接触の程度が相対的に弱ければ、第2コイル部の両端部の状態が短絡状態へと切り替わらない場合が生じかねない。従って、対象物の位置を検出する精度を上げるという観点から見れば、移動部が2コイル部に接触していない場合には、第2コイル部の両端部の状態は短絡状態にあり、第2コイル部と移動部との接触によって第2コイル部が弾性変形することで、第2コイル部の両端部の状態が短絡状態から開放状態に切り替えられることが好ましい。
【0028】
移動部が第2コイル部に接触していない場合に第2コイル部の両端部の状態が短絡状態である位置検出装置の態様では、前記第2コイル部の両端部の夫々は、他方側の端部と連結する連結部を備えており、前記移動部が前記第2コイル部に接触していない場合には、前記第2コイル部の両端部の前記連結部が互いに連結することで、前記第2コイル部の両端部の状態が短絡状態となり、前記第2コイル部と前記移動部との接触によって前記第2コイル部が弾性変形することで、前記第2コイル部の両端部の前記連結部の連結が解除されると共に前記第2コイル部の両端部の状態が短絡状態から開放状態に切り替わるように構成してもよい。
【0029】
このように構成すれば、第2コイル部の両端部は、連結部の連結(例えば、ひっかかりないしはかみ合い)によって短絡状態が維持されている。従って、第2コイル部の両端部の間が広がってしまう技術的な不都合を好適に抑制することができる。また、開放状態にするためには、連結部の連結を解消すればよいため、比較的容易に、第2コイル部の両端部の状態を短絡状態から開放状態へと切り替えることができる。
【0030】
第2コイルの両端部の夫々が連結部を備える位置検出装置の態様では、前記移動部が前記第2コイル部に接触していない場合には、前記第2コイル部の両端部の連結部が前記第2コイル部の弾性力によって互いに連結されることで、前記第2コイル部の両端部の状態が短絡状態となるように構成してもよい。
【0031】
このように構成すれば、第2コイル部自身の弾性を利用して、第2コイル部の両端部の状態を短絡状態にすることができる。
【0032】
本実施形態の位置検出装置の他の態様は、前記第2コイル部は、前記移動部が一の方向に沿って移動しながら前記第2コイル部に接触することで前記第2コイル部の両端部が短絡状態から開放状態へと又は短絡状態から開放状態へと切り替えられる場合には、前記移動部を前記一の方向とは逆側の他の方向に向かって押し戻すように作用する。
【0033】
この態様によれば、第2コイル部からの応力によって、移動部を元の位置に戻すことができる。
【0034】
本実施形態の位置検出装置の他の態様では、前記第1コイル部及び前記検出回路は、所定の基板上に配置されており、前記第2コイル部及び前記移動部は、前記所定の基板から離れた位置に配置されている。
【0035】
この態様によれば、例えば、所定の基板上に検出部を配置し且つ所定の基板とは離れた位置に第2コイル部を配置する場合であっても、検出部と第2コイル部とを接続する電気的な配線を設けなくともよくなる。
【0036】
(電子機器の実施形態)
本実施形態の電子機器は、上述した本実施形態の位置検出装置(但し、その各種態様をを含む)を備える。
【0037】
本実施形態の電子機器によれば、上述した本実施形態の位置検出装置が享受することができる各種効果と同様の効果を享受することができる。
【0038】
尚、上述した本実施形態の位置検出装置における各種態様に対応して、本実施形態の電子機器も各種態様を採ることが可能である。
【0039】
本実施形態の電子機器の一の態様は、前記対象物は、情報の記録及び再生の少なくとも一方が可能な光ディスクであり、当該電子機器は、前記光ディスクをスロットイン方式でローディングするディスクドライブであり、前記第1コイル部は、前記ディスクドライブが備えるプリント基板上に配置されており、前記第2コイル部及び前記移動部は、前記プリント基板から離れた位置に配置されている。
【0040】
この態様によれば、光ディスクをスロットイン方式でローディングするディスクドライブにおいて、光ディスクの位置を検出しながら上述した各種効果を享受することができる。
【0041】
本実施形態のこのような作用及び他の利得は次に説明する実施例から更に明らかにされる。
【0042】
以上説明したように、本実施形態の位置検出装置によれば、第1コイル部と、第2コイル部と、移動部と、検出部とを備える。本実施形態の電子機器によれば、本実施形態の位置検出装置を備える。従って、位置検出装置を構成する構成部品の数を相対的に減らすことができ、コスト増加を抑えることができる。
【実施例】
【0043】
以下、図面を参照しながら、位置検出装置及び電子機器の実施例について説明する。尚、以下では、位置検出装置を、電子機器の一例であるディスクドライブ10に適用した例について説明する。もちろん、位置検出装置をディスクドライブ以外の任意の電子機器に対して適用してもよい。
【0044】
(1)ディスクドライブの外観
図1を参照して、ディスクドライブ10の外観について説明する。図1は、ディスクドライブ10の外観を示す斜視図である。
【0045】
図1に示すように、ディスクドライブ10は、光ディスク1に対し、情報の記録及び再生の少なくとも一方を行う装置である。ディスクドライブ10は、光ディスク1を着脱することができるタイプであり、また、光ディスク1の着脱方式についてスロットイン方式を採用している。尚、光ディスク1としては、例えばDVDや、CDや、ブルーレイディスク等が一例としてあげられる。
【0046】
ディスクドライブ10は、シャーシ11及びフロントカバー12を備えている。
【0047】
シャーシ11は例えば金属材料により形成され、底板を有し、必要に応じて側板、天井板を有している。
【0048】
フロントカバー12は例えば樹脂材料により形成されている。フロントカバー12にはディスクスロット13が形成されている。ディスクスロット13は、光ディスク1のローディング及びイジェクトを行うときに光ディスク1を通過させる溝である。
【0049】
なお、以下の説明では、図1中の矢示X方向を左右方向といい、矢示Y方向を前後方向といい、矢示Z方向を上下方向という。
【0050】
(2)ディスクドライブの内部構成
図2を参照して、ディスクドライブ10の内部構成について説明する。図2は、ディスクドライブ10の内部構成を示す平面図である。
【0051】
図2に示すように、ディスクドライブ10は、一対のローディングアーム21と、ラックプレート31と、セレクトプレート37と、イジェクトアーム41と、トリガープレート46と、第1シフトバー51と、第2シフトバー55と、トラバースメカ61と、モーター65と、ピニオン66と、メイン基板80とを備えている。
【0052】
ローディングアーム21は、ディスクドライブ10前側のディスクスロット13近傍の位置に左右対称に配置されている。各ローディングアーム21は、支軸22を介してシャーシ11上に回動可能に支持されている。各ローディングアーム21は例えば樹脂材料または金属材料により形成されている。
【0053】
各ローディングアーム21の先端部上面にはローラー23が回転可能に取り付けられている。ローラー23はモーター65により回転する。左側のローラー23は光ディスク1の左側周縁と接触する。右側のローラー23は光ディスク1の右側周縁と接触する。
【0054】
ローディングアーム21は、ローラー23を介して光ディスク1を狭持し、光ディスク1の搬送を行う。ローディングアーム21は、光ディスク1の前進又は後退に従って回動し、これによりローディングアーム21の先端側が開閉する。
【0055】
各ローディングアーム21の軸部下面にはギア24が固定されている。左側のギア24はピニオン25を介してラックプレート31の左側のラック部31Aに噛み合っている。右側のギア24はラックプレート31の右側のラック部31Bに直接噛み合っている。ギア24、ピニオン25並びにラック部31A及び31Bは、各ローディングアーム21の回動をラックプレート31の左右方向の移動に変換する。具体的には、各ローディングアーム21が開くときの各ローディングアーム21の回動をラックプレート31の左方向の移動に変換し、各ローディングアーム21が閉じるときの各ローディングアーム21の回動をラックプレート31の右方向の移動に変換する。
【0056】
ラックプレート31は、ディスクドライブ10前側のディスクスロット13近傍に位置し、シャーシ11とローディングアーム21との間に配置されている。ラックプレート31は、シャーシ11に左右方向に移動可能に支持されている。ラックプレート31は例えば樹脂材料又は金属材料により形成されている。ラックプレート31には一対のラック部31A及び31Bが形成されている。
【0057】
ラックプレート31の右側後部にはスイッチングエッジ32が形成されている。スイッチングエッジ32は左右方向に直線状に伸張している。ラックプレート31の左右方向の移動によりスイッチングエッジ32が左右方向に移動すると、スイッチングエッジ32とねじりコイルばね71との接触の有無又は接触の状態が変わる。その結果、ねじりコイルばね71の両端部分の状態が開放状態(言い換えれば、絶縁状態)から短絡状態(言い換えれば、導通状態)へと又は短絡状態から開放状態へと切り替わる。また、ラックプレート31の左右方向の移動によりスイッチングエッジ32が左右方向に移動すると、スイッチングエッジ32とねじりコイルばね72との接触の有無が変わる。その結果、ねじりコイルばね72の両端部分の状態が開放状態から短絡状態へと又は短絡状態から開放状態へと切り替わる。
【0058】
尚、ねじりコイルバネ71及び72は、その一部がシャーシ11に対して直接的に又は間接的に固定されていることが好ましい。ねじりコイルバネ71及び72は、シャーシ11上に形成された支軸に固定されていることが好ましい。従って、スイッチングエッジ32がねじりコイルバネ71及び72に接触した場合であっても、ねじりコイルバネ71及び72が移動することはなく、ねじりコイルバネ71及び72は、両端部分の状態が切替わる程度に弾性変形することが好ましい。尚、後述のねじりコイルバネ73についても同様である。
【0059】
ここで、図3を参照して、「移動部」の一具体例であるラックプレート31のスイッチングエッジ32と「第2コイル部」の一具体例であるねじりコイルばね71及び72との接触の態様について説明する。言い換えれば、ねじりコイルばね71の両端部分の状態が開放状態から短絡状態へと又は短絡状態から開放状態へと切り替わる態様について説明する。図3は、ねじりコイルばね71の両端部分の状態が開放状態から短絡状態へと又は短絡状態から開放状態へと切り替わる態様を示す平面図である。尚、図3では、ねじりコイルばね71にラックプレート31のスイッチングエッジ32が接触していない状態では、ねじりコイルばね71又は72の両端部分が短絡状態にある場合の例について説明する。つまり、ねじりコイルばね71にラックプレート31のスイッチングエッジ32が接触していない状態では、ねじりコイルばね71又は72の両端部分が互いに接触している状態にある場合の例について説明する。
【0060】
図3(a)に示すように、ねじりコイルばね71にラックプレート31のスイッチングエッジ32が接触していない状態では、ねじりコイルばね71の両端部分が短絡状態にある。より具体的には、ねじりコイルばね71の両端部分は、例えば、相互に連結可能なカギ形状を有している。両端部分のカギ形状が互いに引っかかることで、ねじりコイルばね71の両端部分が短絡状態にある。この場合、ねじりコイルばね71は、電気的に又は磁気的には、コイルとして作用する。尚、ねじりコイルばね71の両端部分のカギ形状は、ねじりコイルばね71にラックプレート31のスイッチングエッジ32が接触していない状態では、例えば、ねじりコイルバネ71自身の弾性によって互いに引っかかることが好ましい。
【0061】
一方で、図3(b)に示すように、ねじりコイルばね71にラックプレート31のスイッチングエッジ32が接触すると、ねじりコイルばね71は、スイッチングエッジ32の応力によってたわむ。その結果、ねじりコイルばね71の両端部分のカギ形状の引っかかりが解消される。つまり、ねじりコイルばね71の両端部分が互いに接触しなくなる。これにより、ねじりコイルばね71の両端部分の状態が、短絡状態から開放状態に切り替わる。この場合、ねじりコイルばね71は、電気的に又は磁気的には、コイルとして作用しない。
【0062】
尚、ねじりコイルばね71がスイッチングエッジ32の応力によってたわんでいる場合には、ねじりコイルばね71は、スイッチングエッジ32を元の位置に戻す方向に作用する力を、スイッチングエッジ32に対して加えるように構成してもよい。
【0063】
本実施例では、ねじりコイルばね71の状態は、ラックプレート31のスイッチングエッジ32との接触状態に応じて、コイルとして作用する状態及びコイルとして作用しない状態のいずれかとなる。尚、ラックプレート31のスイッチングエッジ32とねじりコイルばね71との接触状態が、光ディスク1の搬送状態によって変わることを考慮すれば、本実施例では、ねじりコイルばね71の状態は、光ディスク1の搬送状態(つまり、光ディスク1の位置)に応じて、コイルとして作用する状態及びコイルとして作用しない状態のいずれかとなる。
【0064】
尚、図3では、ねじりコイルばね71について説明しているが、ねじりコイルばね72も同様に、ラックプレート31のスイッチングエッジ32との接触状態に応じて、コイルとして作用する状態及びコイルとして作用しない状態のいずれかとなる。
【0065】
再び図2において、ラックプレート31の左側後部にはセレクトカム溝33が形成されている。セレクトカム溝33内にはセレクトプレート37のセレクトピン38が挿入されている。また、ラックプレート31の左側後部には2個の退避制御溝(即ち、第1退避制御溝34及び第2退避制御溝35)が形成されている。ラックプレート31が左方向に移動し且つ第1シフトバー51が前方向に移動したときに、第1シフトバー51の退避制御ピン53が退避制御溝34及び35のいずれかに進入する。
【0066】
セレクトプレート37は、ディスクドライブ10左側に配置されている。セレクトプレート37は、シャーシ11に固定されたモーターブランケット(図示せず)に前後方向に移動可能に支持されている。これにより、セレクトプレート37はシャーシ11に対し前後方向に移動可能である。セレクトプレート37は例えば樹脂材料又は金属材料により形成されている。ディスクドライブ10の左側には、いくつかの部材が上下方向に重なり合っている。セレクトプレート37は、概ね、ラックプレート31、トリガープレート46及び第2シフトバー55の下方に位置し、ピニオン66の上方に位置する。
【0067】
セレクトプレート37の前側上面にはセレクトピン38が設けられている。セレクトピン38の一端側は上向きに伸び、ラックプレート31のセレクトカム溝33に挿入され、他端側はセレクトプレート37に固定されている。セレクトピン38及びセレクトカム溝33は、ラックプレート31の左右方向の移動をセレクトプレート37の前後方向の移動に変換する。具体的には、セレクトピン38及びセレクトカム溝33は、ラックプレート31の左方向の移動をセレクトプレート37の後ろ方向の移動に変換し、ラックプレート31の右方向の移動をセレクトプレート37の前方向の移動に変換する。
【0068】
セレクトプレート37の後ろ側上面には、イジェクトアーム41の回動を規制するストッパー39が設けられている。ストッパー39の一端側は上向きに伸び、他端側はセレクトプレート37の上面に固定されている。
【0069】
イジェクトアーム41は、ローディング時には一端側が光ディスク1の後ろ側周縁に接触することにより光ディスク1の引き込み完了を検出し、イジェクト時には一端側が光ディスク1の後ろ側周縁を押すことにより光ディスク1を前方向に移動させる。イジェクトアーム41は、セレクトプレート37の後部上面上に回動可能に支持されている。イジェクトアーム41は例えば金属材料または樹脂材料により形成されている。イジェクトアーム41は支軸42を中心に回動する。イジェクトアーム41の支軸42はセレクトプレート37の前後方向の移動に伴って前後方向に移動する。イジェクトアーム41の一端側上面には接触部材43が取り付けられている。接触部材43は光ディスク1の周縁と接触する。
【0070】
イジェクトアーム41の他端側には押動制御部44が形成されている。押動制御部44は、イジェクトアーム41が後ろ方向に回動すると前方向に移動し、トリガープレート46のトリガーピン47を押し、これによりトリガープレート46を前方向に押し動かす。
【0071】
トリガープレート46は、セレクトプレート37の後部上方に位置し、シャーシ11に固定されたモーターブランケット(図示せず)に取り付けられている。トリガープレート46は例えば金属材料により形成されている。トリガープレート46は、セレクトプレート37上方でセレクトプレート37に対して前後方向に移動することができる。また、トリガープレート46は、セレクトプレート37に支軸42を介して回動可能に取り付けられたイジェクトアーム41とコイルばね49を介して接続されている。このため、トリガープレート46はセレクトプレート37の前後方向の移動に伴って前後方向に移動する。
【0072】
トリガープレート46は、セレクトプレート37及びイジェクトアーム41の上方に覆い被さるように配置されている。トリガープレート46の前側右縁部に形成されたラック部46Aは、トリガープレート46からセレクトプレート37の右縁近傍を降りてセレクトプレート37の下方に潜り込んでいる。ラック部46Aは、トリガープレート46が前進したときに、セレクトプレート37の下方に配置されたピニオン66と噛み合う。
【0073】
トリガープレート46の後ろ側下面にはトリガーピン47が設けられている。トリガーピン47の一端側は下向きに伸び、他端側はトリガープレート46の下面に固定されている。トリガーピン47の一端側は、イジェクトアーム41の押動制御部44と接触可能な位置まで伸びている。
【0074】
トリガープレート46の前側右縁部には第1伝達ピン48が設けられている。第1伝達ピン48の一端側は右方向に伸び、第1シフトバー51の伝達溝51Aに挿入されている。第1伝達ピン48の他端側はトリガープレート46の右縁部に固定されている。
【0075】
イジェクトアーム41とトリガープレート46との間にはコイルばね49が取り付けられている。コイルばね49は、イジェクトアーム41の他端側を前方向に引っ張っている。
【0076】
第1シフトバー51は、シャーシ11上に前後方向に移動可能に支持されている。第1シフトバー51は例えば樹脂材料により形成される。
【0077】
第1シフトバー51の左側側面には伝達溝51Aが形成されている。伝達溝51Aは、前後方向にシャーシ11の底板に対しほぼ平行に伸張している。伝達溝51Aにはトリガープレート46の第1伝達ピン48が挿入されている。また、第1シフトバー51の前側上面には第2伝達ピン52が設けられている。第2伝達ピン52の一端側は上方に伸び、第2シフトバー55の伝達スロット55Aに挿入されており、他端側は第1シフトバー51の上面に固定されている。また、第1シフトバー51の前側上面には退避制御ピン53が設けられている。退避制御ピン53の一端側はラックプレート31の退避制御溝34及び35と接触可能な位置まで上方に伸び、他端側は第1シフトバー51の上面に固定されている。退避制御ピン53は、ラックプレート31が左方向に移動し、且つ第1シフトバー51が前方向に移動したときに、ラックプレート31の退避制御溝34及び35のいずれかに進入する。退避制御ピン53並びに退避制御溝34及び35は、クランプ時に、ローディングの過程で左方向に移動したラックプレート31を更に左方向に移動させる。
【0078】
第2シフトバー55は、シャーシ11上に左右方向に移動可能に支持されている。第2シフトバー55は例えば樹脂材料により形成される。
【0079】
第2シフトバー55の左側端部には伝達スロット55Aが形成されている。伝達スロット55Aには第1シフトバー51の第2伝達ピン52が挿入されている。第2シフトバー55の後ろ側側面には昇降溝55Bが形成されている。昇降溝55Bは、第2シフトバー55の左右方向の移動によりトラバースメカ61を昇降させるためのカム溝であり、右端が低位置にあり、左端が高位置にある。昇降溝55Bにはトラバースメカ61に取り付けられた昇降ピン64が挿入されている。
【0080】
第2シフトバー55の右側端部にはスイッチングスティック56が形成されている。スイッチングスティック56は左右方向に直線状に伸張している。第2シフトバー55の左右方向の移動によりスイッチングスティック56が左右方向に移動すると、スイッチングスティック56とねじりコイルばね73との接触の有無又は接触の状態が変わる。その結果、ねじりコイルばね73の両端の状態が開放状態から短絡状態へと又は短絡状態から開放状態へと切り替わる。尚、「移動部」の一具体例である第2シフトバー55のスイッチングスティック56と「第2コイル部」の一具体例であるねじりコイルばね73との接触の態様については、図3を用いて説明した、ラックプレート31のスイッチングエッジ32と「第2コイル部」の一具体例であるねじりコイルばね71及び72との接触の態様と同一である。
【0081】
トラバースメカ61には、ターンテーブル62及び光ピックアップ63等が設けられている。モーター65は、ピニオン66を回転駆動すると共に、各ローディングアーム21のローラー23を回転駆動する。ピニオン66は、セレクトプレート37の下方に配置されている。上述したようにセレクトプレート37及びトリガープレート46は前後方向に移動するが、ピニオン66の軸は不動である。ピニオン66は、クランプ動作時にモーター65の動力をトリガープレート46に伝達し、第2シフトバー55、第1シフトバー51及びトラバースメカ61等を移動させる。
【0082】
尚、トリガープレート46、第1シフトバー51、第2シフトバー55、昇降ピン64、モーター65、ピニオン66及びターンテーブル62に対向するようにターンテーブル62の上方に設けられたクランパー(図示せず)などによりクランプ機構が構成されている。
【0083】
ねじりコイルばね71、72及び73は、例えば、ディスクドライブ10の右側に配置されている。但し、ねじりコイルばね71、72及び73は、ディスクドライブ10内のいずれの位置に配置されていてもよい。
【0084】
各ねじりコイルばね71、72及び73は、導線が巻かれた巻き線部分と、当該巻き線部分の両端部である両端部分とを備えている。各ねじりコイルばね71、72及び73の両端部分は、光ディスク1の搬送位置に応じて変化する各ねじりコイルばね71、72及び73とラックプレート31又は第2シフトバー55との接触状態に応じて、開放されたり或いは短絡されたりする。より具体的には、ねじりコイルばね71の両端部分は、光ディスク1の搬送位置に応じて変化するねじりコイルばね71とラックプレート31のスイッチングエッジ32との接触状態に応じて、開放されたり或いは短絡されたりする。ねじりコイルばね72の両端部分は、光ディスク1の搬送位置に応じて変化するねじりコイルばね72とラックプレート31のスイッチングエッジ32との接触状態に応じて、開放されたり或いは短絡されたりする。ねじりコイルばね73の両端部分は、光ディスク1の搬送位置に応じて変化するねじりコイルばね73と第2シフトバー55のスイッチングスティック56との接触状態に応じて、開放されたり或いは短絡されたりする。つまり、各ねじりコイルばね71、72及び73は、その両端部分が開放されているか又は短絡されているかに応じて、いわばオン及びオフという2値の状態を切り替えるスイッチとして作用する。
【0085】
例えば、ねじりコイルばね71、72及び73の少なくとも一つの両端部分は、ラックプレート31又は第2シフトバー55がデフォールトの位置(例えば、光ディスク1がローディングされていない場合の位置)にある場合には、短絡されていてもよい。つまり、ねじりコイルばね71、72及び73の少なくとも一つは、ラックプレート31及び第2シフトバー55がデフォールトの位置にある場合には、コイルとして作用してもよい。一方で、ねじりコイルばね71、72及び73の少なくとも一つの両端部分は、光ディスク1の搬送に伴うラックプレート31及び第2シフトバー55の移動によってねじりコイルばね71、72及び73の少なくとも一つとラックプレート31又は第2シフトバー55との接触状態が変化することで、開放されてもよい。つまり、ねじりコイルばね71、72及び73の少なくとも一つは、光ディスク1が所定位置に搬送されることに伴ってラックプレート31又は第2シフトバー55が所定位置にある場合には、コイルとして作用しなくともよい。
【0086】
或いは、ねじりコイルばね71、72及び73の両端部分の少なくとも一つは、ラックプレート31及び第2シフトバー55がデフォールトの位置(例えば、光ディスク1がローディングされていない場合の位置)にある場合には、開放されていてもよい。つまり、ねじりコイルばね71、72及び73の少なくとも一つは、ラックプレート31又は第2シフトバー55がデフォールトの位置にある場合には、コイルとして作用しなくともよい。一方で、ねじりコイルばね71、72及び73の少なくとも一つの両端部分は、光ディスク1の搬送に伴うラックプレート31及び第2シフトバー55の移動によってねじりコイルばね71、72及び73の少なくとも一つとラックプレート31又は第2シフトバー55との接触状態が変化することで、短絡されてもよい。つまり、ねじりコイルばね71、72及び73の少なくとも一つは、光ディスク1が所定位置に搬送されることに伴ってラックプレート31及び第2シフトバー55が所定位置にある場合には、コイルとして作用してもよい。
【0087】
メイン基板80は、ねじりコイルバネ71、72及び73と上下方向に沿って重なる位置に、プリントコイル81、82及び83を備えている。
【0088】
ここで、図4を参照して、メイン基板80の構成を、ねじりコイルばね71、72及び73の配置関係と共に説明する。図4は、メイン基板80の構成を示す平面斜視図である。
【0089】
図4に示すように、メイン基板80上には、プリントコイル81、82及び83と、電源回路84と、電圧検出回路85と、位置検出回路86とが形成されている。
【0090】
プリントコイル81は、メイン基板80にパターニングされた平面状のコイルであって、上ねじりコイルばね71と上下方向に沿って重なる位置に形成される。より具体的には、プリントコイル81は、電源回路84から供給される電流によってプリントコイル81から発生する磁界がねじりコイルばね71(例えば、ねじりコイルばね71の巻き線部分)を通過するような位置に形成される。更に、プリントコイル81は、ねじりコイルバネ71から発生する磁界が、プリントコイル81(例えば、プリントコイル81の巻き線部分)を通過するような位置に形成される。
【0091】
プリントコイル82は、メイン基板80にパターニングされた平面状のコイルであって、ねじりコイルばね72と上下方向に沿って重なる位置に形成される。より具体的には、プリントコイル82は、電源回路84から供給される電流によってプリントコイル82から発生する磁界がねじりコイルばね72(例えば、ねじりコイルばね72の巻き線部分)を通過するような位置に形成される。更に、プリントコイル82は、ねじりコイルバネ72から発生する磁界が、プリントコイル82(例えば、プリントコイル82の巻き線部分)を通過するような位置に形成される。
【0092】
プリントコイル83は、メイン基板80にパターニングされた平面状のコイルであって、ねじりコイルばね73と上下方向に沿って重なる位置に形成される。より具体的には、プリントコイル83は、電源回路84から供給される電流によってプリントコイル83から発生する磁界がねじりコイルばね73(例えば、ねじりコイルばね73の巻き線部分)を通過するような位置に形成される。更に、プリントコイル83は、ねじりコイルバネ73から発生する磁界が、プリントコイル83(例えば、プリントコイル83の巻き線部分)を通過するような位置に形成される。
【0093】
電源回路84は、プリントコイル81、82及び83の夫々に電流を供給する。その結果、プリントコイル81、82及び83の夫々は、磁界を発生させる。
【0094】
電圧検出回路85は、プリントコイル81、82及び83の夫々の端子間電圧を検出する。
【0095】
位置検出回路86は、電圧検出回路85により検出されたプリントコイル81、82及び83の夫々の端子間電圧に基づいて、光ディスク1の位置を検出する。言い換えれば、位置検出回路86は、電圧検出回路85より検出されたプリントコイル81、82及び83の夫々の端子間電圧に基づいて、光ディスク1の現在の搬送状態を検出する。その結果、メイン基板80上に形成される不図示の駆動制御回路は、位置検出回路86によって検出された光ディスク1の位置に応じて、ローディング時、クランプ時およびイジェクト時におけるモーター65の駆動を制御する。
【0096】
(3)位置検出回路による位置検出の手法
続いて、図5を参照して、位置検出回路86による位置検出の手法について説明する。図5は、位置検出回路86による位置検出の手法の流れを示すフローチャートである。
【0097】
図5に示すように、ディスクドライブ10に対する光ディスク1のローディングが開始される(ステップS1)。尚、以下の説明では、説明の簡略化のため、光ディスク1のローディングが開始される前の時点では、ねじりコイルばね71、72及び73の夫々の両端部分の状態は短絡状態にあるものとする。つまり、光ディスク1のローディングが開始される時点では、ねじりコイルばね71、72及び73の夫々は、コイルとして作用するものとする。
【0098】
この場合、ねじりコイルばね71がコイルとして作用するため、プリントコイル81は、コイルとして作用するねじりコイルばね71の影響を受ける。その結果、図5の右側に示すように、プリントコイル81の端子間電圧は、電源回路84からプリントコイル81に供給される電圧とは異なるものになる。同様に、ねじりコイルばね72がコイルとして作用するため、プリントコイル82は、コイルとして作用するねじりコイルばね72の影響を受ける。その結果、図5の右側に示すように、プリントコイル82の端子間電圧は、電源回路84からプリントコイル82に供給される電圧とは異なるものになる。同様に、ねじりコイルばね73がコイルとして作用するため、プリントコイル83は、コイルとして作用するねじりコイルばね73の影響を受ける。その結果、図5の右側に示すように、プリントコイル83の端子間電圧は、電源回路84からプリントコイル83に供給される電圧とは異なるものになる。
【0099】
その後、光ディスク1の搬送が進むにつれて、ラックプレート31や第2シフトバー55が移動する。その結果、ラックプレート31のスイッチングエッジ32がねじりコイルバネ71に接触する(ステップS2)。或いは、ラックプレート31のスイッチングエッジ32がねじりコイルバネ72に接触する(ステップS2)。或いは、第2シフトバー55のスイッチングスティック56がねじりコイルバネ73に接触する(ステップS2)。
【0100】
その結果、ねじりコイルばね71の両端部分の状態が、短絡状態から開放状態へと切り替えられる(ステップS3)。或いは、ねじりコイルばね72の両端部分の状態が、短絡状態から開放状態へと切り替えられる(ステップS3)。或いは、ねじりコイルばね73の両端部分の状態が、短絡状態から開放状態へと切り替えられる(ステップS3)。
【0101】
この場合、ねじりコイルばね71はコイルとして作用しなくなるため、プリントコイル81は、ねじりコイルばね71の影響を受けなくなる。その結果、光ディスク1が開始される前の時点と比較して、プリントコイル81の端子間電圧が変動する(ステップS4)。具体的には、図5の右側に示すように、プリントコイル81の端子間電圧は、電源回路84からプリントコイル81に供給される電圧と同じになる。或いは、ねじりコイルばね72はコイルとして作用しなくなるため、プリントコイル82は、ねじりコイルばね72の影響を受けなくなる。その結果、光ディスク1が開始される前の時点と比較して、プリントコイル82の端子間電圧が変動する(ステップS4)。具体的には、図5の右側に示すように、プリントコイル82の端子間電圧は、電源回路84からプリントコイル82に供給される電圧と同じになる。或いは、ねじりコイルばね73はコイルとして作用しなくなるため、プリントコイル83は、ねじりコイルばね73の影響を受けなくなる。その結果、光ディスク1が開始される前の時点と比較して、プリントコイル83の端子間電圧が変動する(ステップS4)。具体的には、図5の右側に示すように、プリントコイル83の端子間電圧は、電源回路84からプリントコイル83に供給される電圧と同じになる。
【0102】
このようなプリントコイル81、82及び83の端子間電圧の変動は、電圧検出回路85によって検出される(ステップS5)。より具体的には、電圧検出回路85は、(i)プリントコイル81の端子間電圧が変動しているか否か、(ii)プリントコイル82の端子間電圧が変動しているか否か、及び(iii)プリントコイル83の端子間電圧が変動しているか否かを検出する。電圧検出回路85は、検出結果を、位置検出回路86に対して通知する。
【0103】
その後、位置検出回路86は、電圧検出回路85におけるプリントコイル81、82及び83の夫々の端子間電圧の検出結果に基づいて、光ディスク1の現在の搬送状態(つまり、光ディスク1の現在の位置)を検出する。例えば、位置検出回路86は、(i)プリントコイル81の端子間電圧が変動しているか否か、(ii)プリントコイル82の端子間電圧が変動しているか否か、及び(iii)プリントコイル83の端子間電圧が変動しているか否かの検出結果の組み合わせに応じて、光ディスク1の搬送状態(つまり、光ディスク1の現在の位置)を検出する。
【0104】
(4)光ディスク1の搬送動作
続いて、図6から図9を参照して、光ディスク1の搬送動作の過程を、時系列に沿って具体的に説明する。図6から図9の夫々は、光ディスク1の搬送動作の一過程を示す平面図である。
【0105】
光ディスク1がディスクドライブ10に挿入されたとき、ディスクドライブ10は例えば次のように動作する。尚、以下の説明では、光ディスク1がディスクドライブ10にローディングされる前の時点では、図2に示すように、ラックプレート31のスイッチングエッジ32がねじりコイルバネ71及び72に接触しており、第2シフトバー55のスイッチングスティック56がねじりコイルバネ73に接触していないものとする。つまり、光ディスク1がディスクドライブ10にローディングされる前の時点では、ねじりコイルバネ71及び72の夫々の両端部分が開放状態にあり、ねじりコイルバネ73の両端部分が短絡状態にあるものとする。
【0106】
まず、上述した図2に示すように、光ディスク1がディスクドライブ10に挿入されると、光ディスク1の周縁が各ローディングアーム21のローラー23に接触し、各ローディングアーム21を後ろ方向に押す。これにより、各ローディングアーム21が開く。各ローディングアーム21が開くと、ギア24、ピニオン25並びにラック部31A及び31Bの噛合により、ラックプレート31が左方向に移動する。ラックプレート31が移動すると、スイッチングエッジ32がねじりコイルばね71から離れる。つまり、ねじりコイルバネ71の両端部分の状態が開放状態から短絡状態へと切り替わる。その結果、プリントコイル81の端子間電圧が変動すると共に、位置検出回路86によって光ディスク1のローディングが開始されたこと(言い換えれば、例えば、光ディスク1がローディング開始位置にあること)が検出される。これにより、不図示の駆動制御回路はモーター65の駆動を開始させる。これにより、各ローディングアーム21のローラー23が回転を始め、ローラー23の回転により光ディスク1がディスクドライブ10の内部へ引き込まれる。
【0107】
その後、図6に示すように、光ディスク1が引き込まれ、光ディスク1が後ろ方向に搬送されるに従って、各ローディングアーム21が更に開き、ラックプレート31が左方向に更に移動する。そして、スイッチングエッジ32がねじりコイルばね72から離れる。つまり、ねじりコイルバネ72の両端部分の状態が開放状態から短絡状態へと切り替わる。従って、プリントコイル82の端子間電圧が変動すると共に、位置検出回路86によって光ディスク1のローディングが順調に進んでいること(言い換えれば、例えば、光ディスク1がローディング中途位置にあること)が検出される。この場合、不図示の駆動制御回路は、このときのプリントコイル82の端子間電圧の変動により動作を変更せず、それゆえ、モーター65は回転を続け、光ディスク1の搬送が続く。
【0108】
光ディスク1の搬送が続くと、やがて光ディスク1の後ろ側周縁がイジェクトアーム41の接触部材43に接触し、イジェクトアーム41の一端側を後退させる。イジェクトアーム41の一端側が後退すると、イジェクトアーム41の他端側が前進し、イジェクトアーム41の押動制御部44がトリガーピン47を押し、トリガープレート46を前進させる。
【0109】
その後、図7に示すように、光ディスク1がクランプ位置まで搬送され、これによりイジェクトアーム41の一端側が所定の位置まで後退すると、押動制御部44の前進によりトリガープレート46が所定の位置まで前進する。トリガープレート46が所定の位置まで前進すると、トリガープレート46のラック部46Aがピニオン66と噛み合う。ピニオン66は、モーター65が駆動している間は常に回転している。トリガープレート46のラック部46Aがピニオン66と噛み合うと、ピニオン66の回転により、トリガープレート46が更に前進する。即ち、トリガープレート46のラック部46Aがピニオン66と噛み合った瞬間、トリガープレート46を前進させる動力源が、押動制御部44の押圧力からピニオン66の回転に切り替わる。
【0110】
その後、図8に示すように、トリガープレート46が前進すると、トリガープレート46の伝達ピン48により第1シフトバー51も前進する。第1シフトバー51が前進すると、第1シフトバー51の伝達ピン52により第2シフトバー55が右方向に移動する。第2シフトバー55が右方向に移動すると、スイッチングスティック56も右方向に移動する。これにより、スイッチングスティック56の右端がねじりコイルばね73と接触する。つまり、ねじりコイルバネ73の両端部分の状態が短絡状態から開放状態へと切り替わる。その結果、プリントコイル83の端子間電圧が変動すると共に、位置検出回路86によって光ディスク1のローディングが完了したこと(言い換えれば、例えば、光ディスク1がクランプ位置にあること)が検出される。これにより、不図示の駆動制御回路は、モーター65の駆動を停止する。これにより、各ローディングアーム21のローラー23の回転及びピニオン66の回転が止まる。
【0111】
また、第2シフトバー55が右方向に移動すると、第2シフトバー55の昇降溝55Bに挿入された昇降ピン64が持ち上がり、これに伴ってトラバースメカ61が上昇する。これにより、光ディスク1がターンテーブル62とターンテーブル62の上方に配置されたクランパー(図示せず)との間にクランプされる。
【0112】
また、このとき、第1シフトバー51の前進により、第1シフトバー51の退避制御ピン53がラックプレート31の第2退避制御溝35に進入する。そして、退避制御ピン53が第2退避制御溝35の傾斜縁を押すことにより、ラックプレート31が左方向にさらに移動する。これにより、各ローディングアーム21が更に開き、各ローディングアーム21のローラー23が光ディスク1の周縁から離れ、各ローディングアーム21のローラー23と光ディスク1の周縁との間に適切なクリアランスが確保される。
【0113】
更に、退避制御ピン53の第2退避制御溝35への進入によりラックプレート31が左方向に移動すると、セレクトプレート37のセレクトピン38が、セレクトカム溝33の右端部に形成された溝部により後ろ方向にわずかに押され、セレクトプレート37が小さく後退する。セレクトプレート37が小さく後退すると、イジェクトアーム41の支軸42も小さく後退する。このとき、イジェクトアーム41の他端側は、トリガープレート46の前進により伸張したコイルばね49により引っ張られている。このため、イジェクトアーム41は反時計回りに回動し、イジェクトアーム41の一端側が後退し、イジェクトアーム41の接触部材43が光ディスク1の周縁から離れる。これにより、イジェクトアーム41の接触部材43と光ディスク1の周縁との間に適切なクリアランスが確保される。
【0114】
図8に示すように、光ディスク1のクランプが完了し、イジェクトアーム41及び各ローディングアーム21の退避が完了すると、図示しないスピンドルモーターが駆動を開始し、ターンテーブル62が回転し、光ディスク1が回転する。そして、光ピックアップ63により光ディスク1に対し、情報の読み取りまたは記録が行われる。
【0115】
光ディスク1に対する情報の読み取りまたは書き込みが終了し、光ディスク1をイジェクトする旨の指示が与えられたときには、この指示に応じてモーター65が始動する。このときのモーター65の回転方向は、ローディング時とは逆の方向である。そして、ピニオン66が逆回転を始め、これにより、第1シフトバー51及びトリガープレート46が後退する。更に、第2シフトバー55が左方向に移動し、スイッチングスティック56が左方向に移動し、スイッチングスティック56がねじりコイルばね73から離れる。つまり、ねじりコイルバネ73の両端部分の状態が開放状態から短絡状態へと切り替わる。その結果、プリントコイル83の端子間電圧が変動すると共に、位置検出回路86によって光ディスク1のイジェクトが開始されたこと(言い換えれば、例えば、光ディスク1がイジェクト開始位置にあること)が検出される。更に、トラバースメカ61が下降する。更に、第1シフトバー51の退避制御ピン53がラックプレート31の第2退避制御溝35から退出し、ラックプレート31が図示しないばねの力により右方向に移動する。これにより各ローディングアーム21が閉じ、各ローディングアーム21のローラー23が光ディスク1の周縁に接触する。更に、トリガープレート46の後退により、イジェクトアーム41が時計回りに回動し、イジェクトアーム41の一端側が前進し、接触部材43が光ディスク1の周縁に接触する。更に、モーター65の回転により各ローラー23が逆回転を開始する。
【0116】
そして、光ディスク1は、イジェクトアーム41による押され、さらに各ローディングアーム21のローラー23の逆回転により前方向に搬送される。
【0117】
その後、図9に示すように、光ディスク1が前方向に搬送されるにしたがって、各ローディングアーム21の先端側が閉じ、ラックプレート31が右方向に移動する。そして、ラックプレート31のスイッチングエッジ32がねじりコイルばね72に接触する。つまり、ねじりコイルバネ72の両端部分の状態が短絡状態から開放状態へと切り替わる。その結果、プリントコイル82の端子間電圧が変動すると共に、位置検出回路86によって光ディスク1のイジェクトが完了したこと(言い換えれば、例えば、光ディスク1がイジェクト完了位置にあること)が検出される。これにより、不図示の駆動制御回路はモーター65の駆動を停止させる。これにより、各ローディングアーム21のローラー23の回転が停止し、光ディスク1がイジェクト完了位置に停止する。
【0118】
以上説明したように、本実施例のディスクドライブ10によれば、ねじりコイルばね71、72及び73と電圧検出回路85若しくは位置検出回路86とを電気的に接続しなくとも、ねじりコイルばね71、72及び73の状態を検出することができる。つまり、本実施例のディスクドライブ10によれば、2値的に定まるねじりコイルバネ71、72及び73の状態を、ねじりコイルバネ71、72及び73と電気的な配線を介して接続されていないプリントコイル81、82及び83の端子間電圧を検出することで判定することができる。従って、例えば、メイン基板80上に電圧検出回路85若しくは位置検出回路86を配置し且つメイン基板80以外の箇所にねじりコイルばね71、72及び73を配置する場合であっても、電圧検出回路85若しくは位置検出回路86とねじりコイルばね71、72及び73とを接続する電気的な配線を設けなくともよくなる。つまり、ねじりコイルばね71、72及び73をいわゆるワイヤレススイッチとして用いることができる。
【0119】
仮に、ねじりコイルばね71、72及び73に代えて、電気的なオン信号(言い換えれば、接触信号)及びオフ信号(言い換えれば、非接触信号)を出力することでスイッチングエッジ32やスイッチングスティック56との接触状態を電圧検出回路85若しくは位置検出回路86に伝えるメカニカルスイッチを用いる比較例のディスクドライブであれば、メカニカルスイッチと電圧検出回路85若しくは位置検出回路86とは、電気的な配線で接続する必要がある。しかるに、本実施例のディスクドライブ10によれば、このような電気的な配線を設けなくともよいため、比較例のディスクドライブと比較して、ディスクドライブ10を構成する構成部品の数を減らすことができ、コスト増加を抑えることができる。
【0120】
そして、ねじりコイルばね71、72及び73の状態が光ディスク1の位置に応じて変わることを考慮すれば、本実施例のディスクドライブ10によれば、ねじりコイルばね71、72及び73と電圧検出回路85若しくは位置検出回路86とを電気的に接続しなくとも、光ディスク1の位置を好適に検出することができる。
【0121】
更に、本実施例のディスクドライブ10によれば、電圧検出回路85若しくは位置検出回路86が配置されるメイン基板80の外部に電気的な配線を設けなくともよくなる。このため、電気的な配線の断線による検出精度の悪化ないしは検出動作の技術的な不具合が生ずることは殆ど又は全くなくなる。従って、比較例のディスクドライブと比較して、光ディスク1の位置の検出の精度又は信頼性を相対的に高めることができる。
【0122】
加えて、本実施例のディスクドライブ10によれば、比較例のディスクドライブと比較して、相対的に重いメカニカルスイッチ及び電気的な配線に代えて、相対的に軽いねじりコイルばね71、72及び73を用いて光ディスク1の位置を検出することができる。従って、比較例のディスクドライブと比較して、重量が相対的に軽いディスクドライブ10を実現することができる。
【0123】
加えて、本実施例のディスクドライブ10によれば、比較例のディスクドライブと比較して、相対的に厚いメカニカルスイッチ及び電気的な配線に代えて、相対的に薄いプリントコイル81、82及び83を用いて光ディスク1の位置を検出することができる。従って、比較例のディスクドライブと比較して、相対的に薄いディスクドライブ10を実現することができる。
【0124】
加えて、本実施例のディスクドライブ10によれば、ねじりコイルばね71、72及び73がスイッチングエッジ32又はスイッチングスティック56に接触していない場合には、ねじりコイルばね71、72及び73の両端部分の状態を短絡状態に設定することができる。つまり、ねじりコイルばね71、72及び73の初期状態を短絡状態に設定することができる。このため、スイッチングエッジ32又はスイッチングスティック56とねじりコイルばね71、72又は73の接触によって、ねじりコイルばね71、72又は73の両端部分が離されることになる。この場合、ねじりコイルばね71、72又は73の両端部分が少し移動する程度にスイッチングエッジ32又はスイッチングスティック56がねじりコイルばね71、72又は73に接触すれば、ねじりコイルばね71、72又は73の両端部分の状態が開放状態へと切り替わる。従って、スイッチングエッジ32又はスイッチングスティック56とねじりコイルばね71、72又は73との接触の程度の強弱ないしはばらつきの影響を殆ど又は全く受けることなく、ねじりコイルばね71、72又は73の両端部分の状態を短絡状態から開放状態へと切り替えることができる。従って、スイッチングエッジ32又はスイッチングスティック56の移動を左右する光ディスク1の位置の検出精度を相対的に上げることができる。
【0125】
加えて、本実施例のディスクドライブ10によれば、ねじりコイルばね71、72及び73の両端部分は、相互に連結可能なカギ形状を有していてもよい。従って、ねじりコイルばね71、72及び73の両端部分の間隔が広がってしまう技術的な不都合を好適に抑制することができる。また、ねじりコイルばね71、72及び73を開放状態にするためには、カギ形状の連結を解消すればよいため、比較的容易に、ねじりコイルばね71、72及び73の両端部の状態を短絡状態から開放状態へと切り替えることができる。
【0126】
加えて、本実施例のディスクドライブ10によれば、ねじりコイルばね71又は72がスイッチングエッジ32の応力によってたわんでいる(つまり、変形している)場合には、ねじりコイルばね71又は72は、スイッチングエッジ32を元の位置に戻す方向に作用する力を、スイッチングエッジ32に対して加えるように構成してもよい。同様に、本実施例のディスクドライブ10によれば、ねじりコイルばね73がスイッチングスティック56の応力によってたわんでいる(つまり、変形している)場合には、ねじりコイルばね73は、スイッチングスティック56を元の位置に戻す方向に作用する力を、スイッチングスティック56に対して加えるように構成してもよい。このように構成すれば、ねじりコイルばね71、72及び73からの応力を利用して、スイッチングエッジ32(つまり、ラックプレート31)及びスイッチングスティック56(つまり、第2シフトバー55)を元の位置に戻すことができる。従って、光ディスク1の搬送動作を比較的スムーズに行うことができる。
【0127】
また、本発明は、請求の範囲及び明細書全体から読み取るこのできる発明の要旨又は思想に反しない範囲で適宜変更可能であり、そのような変更を伴う位置検出装置及び電子機器もまた本発明の技術思想に含まれる。
【符号の説明】
【0128】
1 光ディスク
10 ディスクドライブ
31 ラックプレート
32 スイッチングエッジ
55 第2シフトバー
56 スイッチングスティック
71、72、73 ねじりコイルバネ
80 メイン基板
81、82、83 プリントコイル
85 電圧検出回路
86 位置検出回路
【特許請求の範囲】
【請求項1】
磁界を発生させる第1コイル部と、
前記第1コイル部により発生させられる磁界が到達する位置にあり、且つ両端部の状態を開放状態から短絡状態へ及び短絡状態から開放状態へと切り替え可能な弾性を有する第2コイル部と、
位置検出の対象となる対象物の移動に伴って移動すると共に、当該移動に伴う前記第2コイル部との接触によって前記第2コイル部を弾性変形させることで前記第2コイル部の両端部の状態を開放状態から短絡状態へと又は短絡状態から開放状態へと切り替える移動部と、
前記第1コイル部の両端の電圧の変化に基づいて、前記対象物の位置を検出する検出部と
を備えることを特徴とする位置検出装置。
【請求項2】
前記移動部が前記第2コイル部に接触していない場合には、前記第2コイル部の両端部の状態は短絡状態であり、
前記第2コイル部と前記移動部との接触によって前記第2コイル部が弾性変形することで、前記第2コイル部の両端部の状態が短絡状態から開放状態に切り替わる
ことを特徴とする請求項1に記載の位置検出装置。
【請求項3】
前記第2コイル部の両端部の夫々は、他方側の端部と連結する連結部を備えており、
前記移動部が前記第2コイル部に接触していない場合には、前記第2コイル部の両端部の連結部が互いに連結することで、前記第2コイル部の両端部の状態が短絡状態となり、
前記第2コイル部と前記移動部との接触によって前記第2コイル部が弾性変形することで、前記第2コイル部の両端部の前記連結部の連結が解除されると共に前記第2コイル部の両端部の状態が短絡状態から開放状態に切り替わる
ことを特徴とする請求項2に記載の位置検出装置。
【請求項4】
前記移動部が前記第2コイル部に接触していない場合には、前記第2コイル部の両端部の連結部が前記第2コイル部の弾性力によって互いに連結されることで、前記第2コイル部の両端部の状態が短絡状態となることを特徴とする請求項3に記載の位置検出装置。
【請求項5】
前記第2コイル部は、前記移動部が一の方向に沿って移動しながら前記第2コイル部に接触することで前記第2コイル部の両端部が短絡状態から開放状態へと又は短絡状態から開放状態へと切り替えられる場合には、前記移動部を前記一の方向とは逆側の他の方向に向かって押し戻すように作用する
ことを特徴とする請求項1から4のいずれか一項に記載の位置検出装置。
【請求項6】
前記第1コイル部及び前記検出部は、所定の基板上に配置されており、
前記第2コイル部及び前記移動部は、前記所定の基板から離れた位置に配置されている
ことを特徴とする請求項1から5のいずれか一項に記載の位置検出装置。
【請求項7】
請求項1から6のいずれか一項に記載の位置検出装置を備えることを特徴とする電子機器。
【請求項8】
前記対象物は、情報の記録及び再生の少なくとも一方が可能な光ディスクであり、
当該電子機器は、前記光ディスクをスロットイン方式でローディングするディスクドライブであり、
前記第1コイル部及び前記検出部は、前記ディスクドライブが備えるプリント基板上に配置されており、
前記第2コイル部及び前記移動部は、前記プリント基板から離れた位置に配置されている
ことを特徴とする請求項7に記載の電子機器。
【請求項1】
磁界を発生させる第1コイル部と、
前記第1コイル部により発生させられる磁界が到達する位置にあり、且つ両端部の状態を開放状態から短絡状態へ及び短絡状態から開放状態へと切り替え可能な弾性を有する第2コイル部と、
位置検出の対象となる対象物の移動に伴って移動すると共に、当該移動に伴う前記第2コイル部との接触によって前記第2コイル部を弾性変形させることで前記第2コイル部の両端部の状態を開放状態から短絡状態へと又は短絡状態から開放状態へと切り替える移動部と、
前記第1コイル部の両端の電圧の変化に基づいて、前記対象物の位置を検出する検出部と
を備えることを特徴とする位置検出装置。
【請求項2】
前記移動部が前記第2コイル部に接触していない場合には、前記第2コイル部の両端部の状態は短絡状態であり、
前記第2コイル部と前記移動部との接触によって前記第2コイル部が弾性変形することで、前記第2コイル部の両端部の状態が短絡状態から開放状態に切り替わる
ことを特徴とする請求項1に記載の位置検出装置。
【請求項3】
前記第2コイル部の両端部の夫々は、他方側の端部と連結する連結部を備えており、
前記移動部が前記第2コイル部に接触していない場合には、前記第2コイル部の両端部の連結部が互いに連結することで、前記第2コイル部の両端部の状態が短絡状態となり、
前記第2コイル部と前記移動部との接触によって前記第2コイル部が弾性変形することで、前記第2コイル部の両端部の前記連結部の連結が解除されると共に前記第2コイル部の両端部の状態が短絡状態から開放状態に切り替わる
ことを特徴とする請求項2に記載の位置検出装置。
【請求項4】
前記移動部が前記第2コイル部に接触していない場合には、前記第2コイル部の両端部の連結部が前記第2コイル部の弾性力によって互いに連結されることで、前記第2コイル部の両端部の状態が短絡状態となることを特徴とする請求項3に記載の位置検出装置。
【請求項5】
前記第2コイル部は、前記移動部が一の方向に沿って移動しながら前記第2コイル部に接触することで前記第2コイル部の両端部が短絡状態から開放状態へと又は短絡状態から開放状態へと切り替えられる場合には、前記移動部を前記一の方向とは逆側の他の方向に向かって押し戻すように作用する
ことを特徴とする請求項1から4のいずれか一項に記載の位置検出装置。
【請求項6】
前記第1コイル部及び前記検出部は、所定の基板上に配置されており、
前記第2コイル部及び前記移動部は、前記所定の基板から離れた位置に配置されている
ことを特徴とする請求項1から5のいずれか一項に記載の位置検出装置。
【請求項7】
請求項1から6のいずれか一項に記載の位置検出装置を備えることを特徴とする電子機器。
【請求項8】
前記対象物は、情報の記録及び再生の少なくとも一方が可能な光ディスクであり、
当該電子機器は、前記光ディスクをスロットイン方式でローディングするディスクドライブであり、
前記第1コイル部及び前記検出部は、前記ディスクドライブが備えるプリント基板上に配置されており、
前記第2コイル部及び前記移動部は、前記プリント基板から離れた位置に配置されている
ことを特徴とする請求項7に記載の電子機器。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−190503(P2012−190503A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−51605(P2011−51605)
【出願日】平成23年3月9日(2011.3.9)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月9日(2011.3.9)
【出願人】(000005016)パイオニア株式会社 (3,620)
【Fターム(参考)】
[ Back to top ]