
位置検出装置
【課題】 本発明は、対象物の位置を高精度に求めると共に、小型化が可能な位置検出装置を提供する。
【解決手段】 光信号を照射する光源と、対象物に取り付けられ、光信号を反射する反射手段と、光信号と反射手段により反射された光信号とを分離する第1の分離手段と、反射された光信号を受光する第1の受光素子と、第1の受光素子の出力信号に基づき、第1の受光素子の受光面における反射された光信号の位置を求める反射位置演算手段と、光源から第1の受光素子までの伝搬距離を求める伝搬距離演算手段と、反射位置演算手段に求められた受光面における反射された光信号の位置と、伝搬距離演算手段に求められた伝搬距離とに基づき、対象物の位置を求める対象物位置演算手段とを有する。
【解決手段】 光信号を照射する光源と、対象物に取り付けられ、光信号を反射する反射手段と、光信号と反射手段により反射された光信号とを分離する第1の分離手段と、反射された光信号を受光する第1の受光素子と、第1の受光素子の出力信号に基づき、第1の受光素子の受光面における反射された光信号の位置を求める反射位置演算手段と、光源から第1の受光素子までの伝搬距離を求める伝搬距離演算手段と、反射位置演算手段に求められた受光面における反射された光信号の位置と、伝搬距離演算手段に求められた伝搬距離とに基づき、対象物の位置を求める対象物位置演算手段とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置検出装置に係り、特に対象物の三次元空間上の位置を検出する位置検出装置に関する。
【背景技術】
【0002】
従来の位置検出装置としては、例えば、レーザ光を用いたものがある。レーザ光を用いる位置検出装置は、レーザ光源と、ミラーが取り付けられ、レーザ光源からの出射レーザ光を反射して反射レーザ光を偏向させるガルバノメータスキャナ(機械的駆動部)と、出射レーザ光と反射レーザ光とを選別するビームスプリッタと、反射レーザ光を検出するフォトディテクタと、対象物の位置を測定する距離測定装置とを有する。
【0003】
このような位置検出装置は、機械的駆動部であるガルバノメータスキャナによりミラーの反射面を制御させ、対象物からの再帰反射を受けた際の反射レーザ光の照射方向と、距離測定装置が求める反射レーザ光から対象物までの距離とに基づいて、対象物の三次元空間上の位置の検出を行う(例えば、特許文献1参照。)。
【特許文献1】特開2001−147269号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の位置検出装置では、機械的に動作するガルバノメータスキャナによりミラーを可動させてレーザ光をスキャンさせるため、騒音の問題や、機械的振動により検出された対象物の三次元空間上の位置精度が低下してしまうという問題があった。
【0005】
また、ガルバノメータスキャナ(機械的駆動部)を用いているため、位置検出装置を小型化できないという問題があった。さらに、レーザ光を用いているため、安全対策のための機構を設ける必要があり、これにより位置検出装置が小型化できないという問題があった。
【0006】
また、レーザ光をスキャンさせて対象物の位置の計測を行うため、計測の時間間隔をスキャン時間以下にできない。このため、移動する対象物からの反射レーザ光の応答性が低下して、検出された対象物の三次元空間上の位置の精度が低下するという問題があった。
【0007】
そこで、本発明は上記の点に鑑みてなされたものであり、対象物の位置を高精度に求めることができると共に、小型化が可能な位置検出装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の一観点によれば、対象物の位置を検出する位置検出装置において、光信号を照射する光源と、前記対象物に取り付けられ、前記光信号を反射する反射面を備えた反射手段と、前記光信号と反射手段により反射された光信号とを分離する第1の分離手段と、前記反射された光信号を受光する第1の受光素子と、前記第1の受光素子の出力信号に基づき、該第1の受光素子の受光面における反射された光信号の位置を求める反射位置演算手段と、前記光源から第1の受光素子までの伝搬距離を求める伝搬距離演算手段と、前記反射位置演算手段に求められた第1の受光素子の受光面における反射された光信号の位置と、前記伝搬距離演算手段に求められた伝搬距離とに基づき、前記対象物の位置を求める対象物位置演算手段とを有することを特徴とする位置検出装置が提供される。
【0009】
本発明によれば、光信号と反射手段により反射された光信号とを分離する第1の分離手段を設けることにより、光信号を所定の範囲に照射することが可能となり、光信号を偏向させる機械的駆動部(ガルバノメータスキャナ)が不要となる。これにより、機械的振動がなくなり、対象物の位置を高精度に求めることができると共に、位置検出装置を小型化することができる。また、反射位置演算手段と、伝搬距離演算手段と、対象物位置演算手段とを設けることにより、第1の受光素子の受光面における反射された光信号の位置と、光源から第1の受光素子までの伝搬距離とに基づいて、対象物位置演算手段により対象物の位置を求めることができる。
【発明の効果】
【0010】
本発明は、対象物の位置を高精度に求めることができると共に、小型化が可能な位置検出装置を実現することができる。
【発明を実施するための最良の形態】
【0011】
次に、図面に基づいて本発明の実施の形態について説明する。
【0012】
(第1の実施の形態)
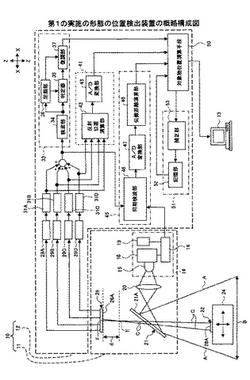
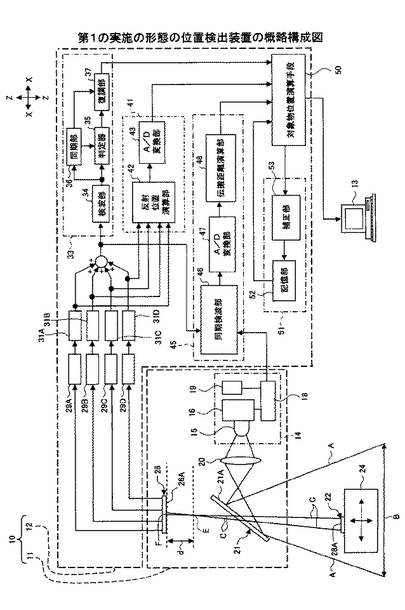
図1を参照して、第1の実施の形態の位置検出装置10について説明する。図1は、第1の実施の形態の位置検出装置の概略構成図である。なお、図1において、Aは第1の分離手段21により同図の下方に分離された光源15から照射された光信号(以下、「光信号A」とする)、Bは光信号Aが照射される領域(以下、「照射領域B」とする)、Cは反射手段により反射された光信号A(以下、「光信号C」とする)、Eは光源15の鏡像位置(以下、「鏡像位置E」とする)、Fは第1の受光素子26の受光面26Aにおける光信号Cのスポット像(以下、「スポット像F」とする)をそれぞれ示している。また、同図中において、X,X方向は第1の受光素子26の受光面26Aと平行な方向、Z,Z方向は第1の受光素子26の受光面26Aに垂直な方向をそれぞれ示している。
【0013】
位置検出装置10は、装置本体11と、演算手段12とを有する。位置検出装置10は、対象物24の三次元空間上の位置を検出するためのものである。位置検出装置10は、情報端末13と接続されており、情報端末13に対象物24の三次元空間上の位置に関するデータが表示される。情報端末13は、例えば、パーソナル・コンピュータ等である。
【0014】
装置本体11は、光信号発生部14と、集光レンズ20と、第1の分離手段21と、再帰光学系を備える反射手段22と、第1の受光素子26とを有する。
【0015】
光信号発生部14は、光源15と、光源駆動部16と、光信号変調手段18と、光信号制御手段19とを有する。光源15は、光信号を発生させるためのものである。光源15は、第1の分離手段21の面21Aに光信号を照射可能な位置に配設されている。光源15としては、例えば、赤外光を照射可能な赤外光LEDを用いるとよい。
【0016】
このように、光源15として赤外光LEDを用いることにより、従来のレーザ光を用いた位置検出装置において必要であった安全対策の機構が不要となり、位置検出装置10を小型化することができる。
【0017】
光源駆動部16は、光源15を駆動させるためのものである。光信号変調手段18は、光信号制御手段19により制御された出力信号により、光源駆動部16の出力信号を変調させる。具体的には、光信号変調手段18は、光源15から照射される光信号の強度、位相、及び周波数のいずれか一つを変調させる。なお、本実施の形態では、光信号の強度を変調させる場合を例に挙げて以下の説明をする。光信号変調手段18としては、例えば、発振器を用いることができる。光信号制御手段19は、光信号変調手段18の出力信号を制御するためのものである。
【0018】
このように、光源15から照射される光信号の強度、位相、及び周波数のいずれか一つを変調させる光信号変調手段18を設けることにより、光信号変調手段18の変調信号と反射戻り光からの復調信号との比較により光信号の伝播時間が算出可能となり、対象物24までの距離が算出することができる。
【0019】
集光レンズ20は、光源15と第1の分離手段21との間に設けられている。集光レンズ20は、後述する第1の受光素子26の受光面26Aに形成される光信号Cのスポット像Fを小さくするためのものである。
【0020】
第1の分離手段21は、第1の受光素子26の受光面26Aと第1の分離手段21の面21Aとが45度の角度を成すように配置されている。第1の分離手段21は、可動することはなく、その位置は固定されている。第1の分離手段21は、光信号Aを図1の下方に照射させて照射領域Bを形成するためのものである。第1の分離手段21としては、例えば、反射率を50%程度に設定した反透過性のミラーを用いることができる。
【0021】
このように、第1の分離手段21を設け、第1の分離手段21により光信号Aが照射される照射領域Bを形成することにより、対象物24に光信号を照射するための機械的駆動部(例えば、ガルバノメータスキャナ)が不必要となり、機械的振動の問題が解消されて、対象物24の三次元空間上の位置を高精度に求めることができると共に、位置検出装置10の小型化を図ることができる。
【0022】
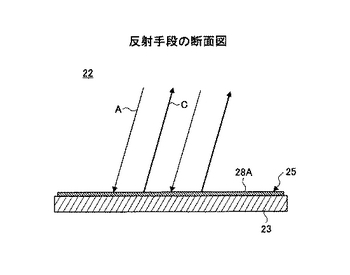
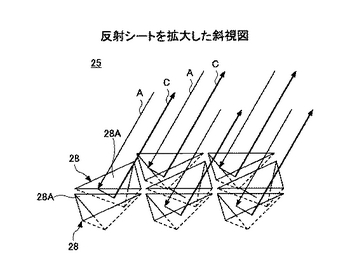
図2は、反射手段の断面図であり、図3は反射シートを拡大した斜視図である。なお、図2において、図1と同一構成部分には同一の符号を付す。
【0023】
図2に示すように、反射手段22は、シート状基材23と、反射シート25とを有しており、三次元空間上の位置を検出したい対象物24に取り付けられている。反射シート25は、シート状基材23上に設けられている。図3に示すように、反射シート25は、複数の三角錐型の反射体28により構成されている。反射体28は、光信号Aを反射させるための反射面28Aを有している。また、複数の反射体28は、反射面28Aが互いに90度の角度を成すように配列されている。反射面28Aにより反射された光信号Aは光信号Cとなり、光信号Cは光信号Aの光路を略正確に逆行し、第1の分離手段21による光源15の鏡像位置Eで光源15と略等しいサイズのスポット像を形成する。なお、対象物24としては、例えば、人間や携帯機器(例えば、PDA等)等が挙げられる。
【0024】
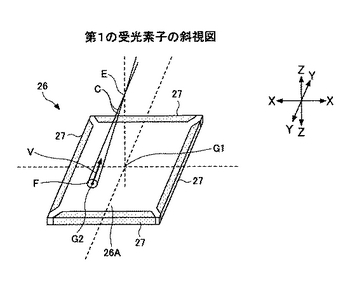
図4は、第1の受光素子の斜視図である。なお、図4において、G1は第1の受光素子26の受光面26Aの重心位置(以下、「重心位置G1」とする)、G2は光信号Cのスポット像Fの重心位置(以下、「重心位置G2」とする)、Vは第1の受光素子26の受光面26Aに入射した光信号Cの方向ベクトル(以下、「方向ベクトルV」とする)、Y,Y方向はX,X方向と直交する方向をそれぞれ示している。また、図4において、図1と同一構成部分には同一の符号を付す。
【0025】
図4に示すように、第1の受光素子26は、光信号Cを受光する受光面26Aと、受光面26Aの4辺に設けられた4つの電極27とを有する。4つの電極27は、後述する増幅器29A〜29Dのいずれか1つと接続されている。受光面26Aが光信号Cを受光した際、4つの電極27は、受光面26Aにおける光信号Cのスポット像Fから各電極27までの抵抗に応じた電流を増幅器29A〜29Dに出力する。
【0026】
上記構成とされた第1の受光素子26は、光源15の鏡像位置Eから光信号Cの進行方向側に距離d離れた光信号Cの光路上に設けられている(図1参照)。なお、距離dは、オフセット量である。また、第1の受光素子26としては、例えば、受光面26Aの抵抗が均一なPIN型フォトダイオードを用いることができる。
【0027】
次に、図1を参照して、演算部12について説明する。演算部12は、増幅器29A〜29Dと、フィルタ31A〜31Dと、出力電流受信手段33と、反射位置演算手段41と、伝搬距離演算手段45と、対象物位置演算手段50と、補正手段51とを有する。
【0028】
増幅器29A〜29Dは、第1の受光素子26の4つの電極27及びフィルタ31A〜31Dと接続されている。増幅器29A〜29Dは、第1の受光素子26の受光面26Aが光信号Cを受光した際、電極27からの出力電流(出力信号)を増幅させて、フィルタ31A〜31Dに送信する。増幅器29A〜29Dとしては、例えば、アンプを用いることができる。
【0029】
フィルタ31A〜31Dは、増幅器29A〜29Dにより増幅された出力電流からノイズを除去するためのものである。フィルタ31A〜31Dとしては、例えば、バンドパスフィルタを用いることができる。
【0030】
出力電流受信手段33は、検波部34と、判定器35と、同期部36と、復調部37とを有する。出力電流受信手段33は、検波部34がフィルタ31A〜31Dを通過した出力電流の和を受信した際、反射光の変調信号復調用受信信号を生成して、復調部37から対象物位置演算手段50にクロック信号等の同期信号(具体的には、この信号に同期させてスポット位置の判定、及び方向ベクトルVの情報の算出などに使用)を送信する。
【0031】
反射位置演算手段41は、反射位置演算部42と、A/D変換部43とを有する。反射位置演算部42は、フィルタ31A〜31D及びA/D変換部43と接続されている。反射位置演算部42は、フィルタ31A〜31Dを通過した出力電流に基づき、第1の受光素子26の受光面26Aの重心位置G1を原点(つまり、重心位置G1の座標が(X,Y,Z)=(0,0,0))とした場合の光信号Cのスポット像Fの重心位置G2(以下、重心位置G2の座標を(X,Y,Z)=(X1,Y1,0)とする)を求める。
【0032】
なお、重心位置G1が光軸上に存在する場合、第1の受光素子26の受光面26Aに入射した光信号Cの方向ベクトルVは、下記(1)式により算出できる。
【0033】
V=(−X1,−Y1,0) ・・・(1)
A/D変換部43は、反射位置演算部42及び対象物位置演算手段50と接続されており、反射位置演算部42により求められる光信号Cの重心位置G2に関するデータをA/D変換して、対象物位置演算手段50に送信する。
【0034】
伝搬距離演算手段45は、同期検波部46と、A/D変換部47と、伝搬距離演算部48とを有する。同期検波部46は、光信号変調手段18と接続されている。同期検波部46は、所定の周波数で正弦波を生成する光信号変調手段18の出力信号により、光源駆動部16を介して光源15の強度を変調駆動させて、光信号Aが照射された際のフィルタ31A〜31Dを通過した電極27の出力電流の和を光信号変調手段18の信号(強度変調信号)で同期検波して位相情報を得る。この位相情報は、A/D変換部47に送信される。
【0035】
A/D変換部47は、同期検波部46及び伝搬距離演算部48と接続されている。A/D変換部47は、同期検波部46で得られた位相情報をA/D変換して、伝搬距離演算部48に送信する。伝搬距離演算部48は、A/D変換された位相情報に基づいて、伝搬時間を検出し、光源15から受光素子26の受光面26Aまでの伝搬距離(以下、「伝搬距離r1」とする)を求めると共に、伝搬距離r1に関するデータを対象物位置演算手段50に送信する。
【0036】
対象物位置演算手段50は、演算部12の制御全般を行なうと共に、反射位置演算手段41により求められる光信号Cのスポット像Fの重心位置G2と、伝搬距離演算手段45により求められる伝搬距離r1とに基づいて、反射手段22が取り付けられた対象物24の三次元空間上の位置を求める。
【0037】
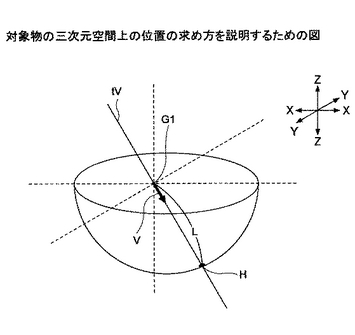
ここで、図1及び図5を参照して、対象物24の三次元空間上の位置の求め方(重心位置G1を原点とした場合)について説明する。図5は、対象物の三次元空間上の位置の求め方を説明するための図である。なお、図5において、Lは重心位置G1から反射手段22までの距離(以下、「距離L」とする)、tV(tは任意の実数)は方向ベクトルVを有し、重心位置G1を通過する直線(以下、「直線tV」とする)をそれぞれ示している。
【0038】
先に説明した図4における座標系を対象物24が存在する三次元空間の座標系とした場合、伝搬距離r1は、重心位置G1から反射手段22までの距離Lの2倍から距離d(オフセット量)を引いた値と等しくなり、下記(2)式が成り立つ。
【0039】
r1=2L−d ・・・(2)
これにより、重心位置G1から反射手段22までの距離Lは、下記(3)式により求めることができる。
【0040】
L=(r1+d)/2 ・・・(3)
したがって、図5に示すように、対象物24の三次元空間上の位置は、重心位置G1を中心とする半径が距離Lと等しい大きさの半球面と直線tVとの交点Hとして求めることができる。
【0041】
また、例えば、室内に存在する対象物24の三次元空間上の位置を検出する場合、位置検出装置10に接続された情報端末13に設置位置情報(例えば、室内の間取りに関する情報や、室内の間取りに対する第1の受光素子26や第1の分離手段21等の設置位置の情報)を記憶させ、対象物24の三次元空間上の位置と上記設置位置情報とを照合することで、室内における対象物24の位置を特定することができる。
【0042】
補正手段51は、記憶部52と、補正部53とを有する。記憶部52は、補正部53及び対象物位置演算手段50と接続されている。補正手段51は、予め求められた基準データや、補正部53から得られた補正データ等を記憶する。なお、基準データとは、既知の位置に関するデータ(座標データ)のことである。
【0043】
補正部53は、記憶部52及び対象物位置演算手段50と接続されている。補正部53は、記憶部52に格納された基準データと、所定の位置に対象物24を配置させたときのデータとの差に基づき、補正データを求めると共に、補正データを記憶部52に記憶させる。
【0044】
また、対象物位置演算手段50は、記憶部52に格納された補正データに基づいて、対象物24の三次元空間上の位置の補正を行う。
【0045】
このように、補正手段51を設け、補正手段51が求めた補正データに基づいて、対象物位置演算手段50が対象物24の三次元空間上の位置の補正することにより、対象物24の三次元空間上の位置を高精度に求めることができる。
【0046】
以上、説明したように、本実施の形態の位置検出装置10によれば、第1の分離手段21により光信号Aが照射される照射領域Bを形成することにより、対象物24に光信号Aを照射するための機械的駆動部(例えば、ガルバノメータスキャナ)が不必要となり、機械的振動の問題が解消されて、対象物24の三次元空間上の位置を高精度に求めることができると共に、位置検出装置10の小型化を図ることができる。
【0047】
なお、位置検出装置10に、開口部(ピンホール)を有する板状部材を設けてもよい。この場合、光源15の鏡像位置Eが上記開口部に収まるように板状部材を配置するとよい。このような板状部材を設けることにより、受光素子26の受光面26Aに形成される光信号Cのスポット像Fのボケを低減させて、反射位置演算部42によりスポット像Fの重心位置G2を精度良く求めることができる。
【0048】
また、光信号Aの光路及び/または光信号Cの光路に、光源15の波長以外の光を遮光する遮光手段(例えば、フィルタ)を設けてもよい。このような遮光手段を設けることにより、室内照明や外光等の不要な光を除去して、電極27の出力電流のS/N比を向上させることができる。
【0049】
さらに、伝搬距離演算手段45としては、上記説明した変調法の他に、パルス光の伝搬時間を計測する方法を用いてもよい。
【0050】
(第2の実施の形態)
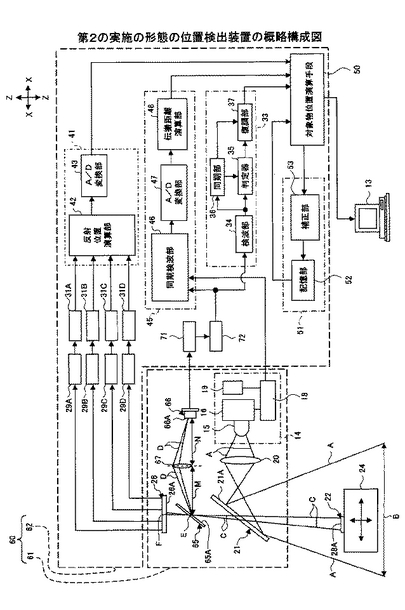
図6を参照して、第2の実施の形態の位置検出装置60について説明する。図6は、第2の実施の形態の位置検出装置の概略構成図である。なお、図6において、Mは光源15の鏡像位置Eから集光レンズ67までの距離(以下、「距離M」とする)、Nは集光レンズ67から第2の受光素子66の受光面66Aまでの距離(以下、「距離N」とする)、Dは第2の分離手段65により第2の受光素子66に向かうように分離された光信号C(以下、「光信号D」とする)をそれぞれ示している。また、図6において、図1に示した位置検出装置10と同一構成部分には同一の符号を付し、その説明を省略する。
【0051】
位置検出装置60は、装置本体61と、演算手段62とを有し、情報端末13と接続されている。装置本体61は、第1の実施の形態で説明した装置本体11の構成に、さらに第2の分離手段65と、第2の受光素子66と、集光レンズ67とを設けた構成とされている。
【0052】
第2の分離手段65は、光信号Cを第1の受光素子26側に通過させると共に、光信号Cの一部を第2の受光素子66に向かうようにするためのものである。第2の分離手段65は、第2の分離手段65の面65Aと第2の受光素子66の受光面66Aとが45度の角度を成すように、光源15の鏡像位置Eに配置されている。第2の分離手段65としては、例えば、ハーフミラーを用いることができる。
【0053】
第2の受光素子66は、第1の受光素子26よりも受光面の面積が小さく、応答速度の速い受光素子であり、第2の分離手段65により分離された光信号Dを受光する。第2の受光素子66としては、例えば、通常の光通信に用いるPINフォトダイオード等を用いることができる。
【0054】
また、第2の受光素子66は、増幅器71及びフィルタ72を介して、同期検波部46及び検波部34と接続されている。つまり、本実施の形態の位置検出装置60では、第2の受光素子66からの出力電流(出力信号)に基づいて、伝搬距離演算手段33が光源15から第2の受光素子66までの伝搬距離r2を求める構成とされている。
【0055】
ここで、第2の受光素子66を設ける理由について説明する。一般的に、受光素子は、受光面の面積が大きいほど応答速度は低下する。例えば、数メートルの距離範囲を検出する際には数MHz以上の変調信号を適用することが望ましいため、第1の受光素子26からの出力信号により光信号Cのスポット像Fの重心位置G2と光源15から第1の受光素子26までの伝搬距離r1とを求める構成とした場合には、受光素子の受光面の面積をあまり小さくできない。
【0056】
したがって、第1の受光素子26の他に、受光面66Aの面積が小さく応答速度の速い第2の受光素子66を設け、第2の受光素子66からの出力電流に基づいて、伝搬距離演算手段33により光源15から第2の受光素子66までの伝搬距離r2を求めることで伝搬距離r2の精度を向上させることが可能となる。これにより、伝搬距離r2と光信号Cのスポット像Fの重心位置G2とに基づいて、対象物位置演算手段50は対象物24の三次元空間上の位置を高精度に求めることができる。
【0057】
集光レンズ67は、第2の受光素子66と第2の分離手段65との間に配置されている。また、光源15の鏡像位置Eから集光レンズ67までの距離Mと、集光レンズ67から第2の受光素子65の受光面65Aまでの距離Nとは、それぞれ集光レンズ67の焦点距離fの2倍となるように設定されている。
【0058】
このように、距離M,Nのそれぞれが焦点距離fの2倍となるように集光レンズ67を配置することにより、対象物24の三次元空間上の位置に依存することなく、第2の受光素子66は光信号Dを受光することができる。
【0059】
演算手段62は、第1の実施の形態で説明した演算手段12の構成に、さらに増幅器71と、フィルタ72とを設けると共に、フィルタ72を同期検波部46及び検波部34と接続させた構成とされている。
【0060】
増幅器71は、第2の受光素子66と接続されている。増幅器71は、第2の受光素子66の受光面66Aが光信号Dを受光した際、第2の受光素子66からの出力電流を増幅させて、フィルタ72に送信する。増幅器71としては、例えば、アンプを用いることができる。
【0061】
フィルタ72は、増幅器71により増幅された出力電流からノイズを除去するためのものである。フィルタ72としては、例えば、バンドパスフィルタを用いることができる。
【0062】
以上、説明したように、本実施の形態の位置検出装置60によれば、第1の受光素子26よりも応答速度の速い第2の受光素子66からの出力電流に基づいて、伝搬距離演算手段33が伝搬距離r2を求めることにより、伝搬距離r2の精度を向上させることができる。また、伝搬距離r1の代わりに伝搬距離r2を用いることにより、対象物24の三次元空間上の位置を高精度に求めることができる。
【0063】
なお、伝搬距離r2を用いて対象物24の三次元空間上の位置を求める場合も、第1の実施の形態の位置検出装置10と同様な手法を用いることができる。
【0064】
(第3の実施の形態)
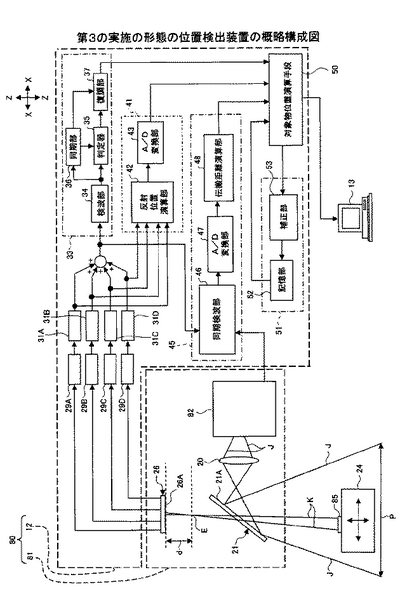
図7を参照して、第3の実施の形態の位置検出装置80について説明する。図7は、第3の実施の形態の位置検出装置の概略構成図である。なお、図7において、Jは光源15から照射された光信号、及び第1の分離手段21により同図の下方に分離された光源15から照射された光信号(以下、「光信号J」とする)、Kは反射手段85に反射された光信号J(以下、「光信号K」とする)、Pは光信号Kが照射される領域(以下、「照射領域P」とする)をそれぞれ示している。また、図7において、図1に示した位置検出装置10と同一構成部分には同一の符号を付し、その説明を省略する。
【0065】
位置検出装置80は、装置本体81と、演算手段12とを有し、情報端末13と接続されている。装置本体81は、集光レンズ20と、第1の分離手段21と、第1の受光素子26と、光信号発生部82と、再帰光学系を備える反射手段85とを有する。つまり、本実施の形態の位置検出装置80は、第1の実施の形態で説明した位置検出装置10と光信号発生部及び反射手段の構成が異なる以外は、位置検出装置10と同様な構成とされている。
【0066】
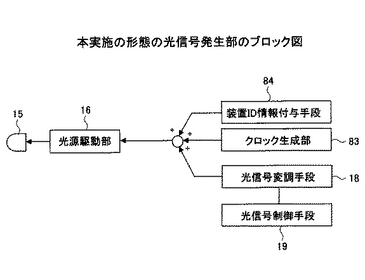
図8は、本実施の形態の光信号発生部のブロック図である。なお、図8において、図1に示した光信号発生部14と同一構成部分には同一の符号を付す。
【0067】
図8に示すように、光信号発生部82は、光源15と、光源駆動部16と、光信号変調手段18と、光信号制御手段19と、クロック生成部83と、装置ID情報付与手段84とを有する。
【0068】
クロック生成部83は、クロック信号を生成し、光信号変調手段18からの出力信号にクロック信号を付与するためのものである。装置ID情報付与手段84は、光信号変調手段18からの出力信号に装置ID情報をデジタル信号として付与するためのものである。装置ID情報とは、例えば、位置検出装置80に一意の付与された装置固有のナンバー等の情報のことである。また、光源15からは、クロック信号、装置ID情報、及び光信号変調手段18からの出力信号を含んだ光信号Jが照射される。
【0069】
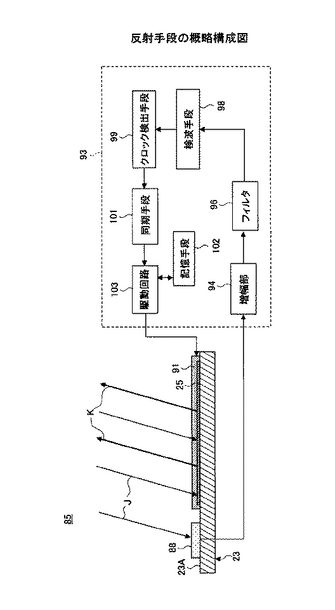
図9は、反射手段の概略構成図である。なお、図9において、図2に示した反射手段22と同一構成部分には同一の符号を付す。
【0070】
図9に示すように、反射手段85は、シート状基材23と、受信手段88と、複数の三角錐型の反射体28と、開閉手段91と、制御部93とを有する。受信手段88は、シート状基材23の面23Aに設けられると共に、後述する制御部93の増幅器94と接続されている。受信手段88は、クロック信号、装置ID情報、及び光信号変調手段18からの出力信号を含んだ光信号Jを受信するためのものである。また、受信手段88は、光信号Jを受信した際、増幅器94に出力信号を送信する。
【0071】
開閉手段91は、シート状基材23の面23Aに設けられた複数の反射体28を覆うように配設されている。開閉手段91は、後述する制御部93の駆動回路103と接続されている。開閉手段91は、反射体28に光信号Jを照射させるか否かの切り換えを行なうためのものである。開閉手段91は、制御部93により受信手段88が受信する光信号Jに応じて、開閉が制御される。
【0072】
開閉手段91が開いた場合(図8に示した状態)には、光信号Jが開閉手段91を通過して反射体28に到達し、反射体28の反射面28Aにより光信号Jは光信号Kとして反射される。また、開閉手段91が閉じた場合には、開閉手段91の表面で光信号Jが遮断され、反射体28に光信号Jが到達しないため、光信号Kは反射されない。なお、反射手段85は、図示していない駆動電源を有しており、この駆動電源により開閉手段91が駆動される。
【0073】
開閉手段91としては、例えば、液晶変調素子を用いることができる。開閉手段91として液晶変調素子を用いることにより、開閉手段91を低電圧駆動させることができる。この場合、駆動電源としては、小型のバッテリー、光発電素子等を用いることができる。
【0074】
制御部93は、増幅器94と、フィルタ96と、検波手段98と、クロック検出手段99と、同期手段101と、記憶手段102と、駆動回路103とを有する。増幅器94は、受信手段88及びフィルタ96と接続されている。増幅器94は、受信手段88が受信した光信号Jを増幅させて、フィルタ96に送信する。増幅器94としては、例えば、アンプを用いることができる。
【0075】
フィルタ96は、増幅器94及び検波手段98と接続されている。フィルタ96は、増幅器94により増幅された光信号Jからノイズを除去する。フィルタ96としては、例えば、バンドパスフィルタを用いることができる。
【0076】
検波手段98は、フィルタ96及びクロック検出手段99と接続されている。検波手段98は、増幅された光信号Jを復調させて、復調された光信号Jをクロック検出手段99に送信するためのものである。
【0077】
クロック検出手段99は、検波手段98及び同期手段101と接続されている。クロック検出手段99は、復調された光信号Jに含まれるクロック信号を検出するためのものである。クロック信号が検出された光信号Jは、同期手段101に送信される。
【0078】
同期手段101は、クロック検出手段99及び駆動回路103と接続されている。同期手段101は、クロック検出手段99が検出したクロック信号により光信号Jを同期させ、同期させた光信号Jを駆動回路103に送信する。
【0079】
記憶手段102は、ユニークID情報を記憶するためのものであり、駆動回路103と接続されている。ユニークID情報とは、例えば、反射手段85に一意の付与された固有のナンバーや、反射手段85が設けられた対象物24に固有の固体情報番号等の情報である。
【0080】
駆動回路103は、同期手段101、記憶手段102、及び開閉手段91と接続されている。
【0081】
本実施の形態の位置検出装置80によれば、光信号Jの照射領域P内に反射手段85を備える対象物24が複数存在する場合、始めに、全ての反射手段85の開閉手段91が光信号Jを遮断するように各制御部93により制御を行い、その後、適当な時間が経過した後に光信号Jを反射するよう各開閉手段91を制御することで、各反射手段85から反射される光信号Kの時間的重なりをなくして、複数の対象物24の三次元空間上の位置を検出することができる。
【0082】
なお、伝搬距離演算手段45として変調法の代わりにパルス光の伝搬時間を計測する方法を用いる場合には、開閉手段91により通過させるパルス光を選択するパルス位置変調方式(PPM)を通信方法として併用してもよい。パルス位置変調方式(PPM)を併用することにより、対象物24との間でID情報や制御情報等の送受信を行なうことができる。
【0083】
以上、本発明の好ましい実施の形態について詳述したが、本発明はかかる特定の実施の形態に限定されるものではなく、特許請求の範囲内に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。なお、撮像素子(例えば、CCD)を用いて、光信号C,Kのスポット像を直接観測して、光信号C,Kのスポット像の重心位置を検出してもよい。
【産業上の利用可能性】
【0084】
本発明は、対象物の位置を高精度に求めることができると共に、小型化が可能な位置検出装置に適用できる。
【図面の簡単な説明】
【0085】
【図1】第1の実施の形態の位置検出装置の概略構成図である。
【図2】反射手段の断面図である。
【図3】反射シートを拡大した斜視図である。
【図4】第1の受光素子の斜視図である。
【図5】対象物の三次元空間上の位置の求め方を説明するための図である。
【図6】第2の実施の形態の位置検出装置の概略構成図である。
【図7】第3の実施の形態の位置検出装置の概略構成図である。
【図8】本実施の形態の光信号発生部のブロック図である。
【図9】反射手段の概略構成図である。
【符号の説明】
【0086】
10,60,80 位置検出装置
11,61,81 装置本体
12,62 演算手段
13 情報端末
14,82 光信号発生部
15 光源
16 光源駆動部
18 光信号変調手段
19 光信号制御手段
20 集光レンズ
21 第1の分離手段
21A,23A,65A 面
22,85 反射手段
23 シート状基材
24 対象物
25 反射シート
26 第1の受光素子
26A,66A 受光面
27 電極
28 反射体
28A 反射面
29A〜29D,71,94 増幅器
31A〜31D,72,96 フィルタ
33 出力電流受信手段
34 検波部
35 判定器
36 同期部
37 復調部
41 反射位置演算手段
42 反射位置演算部
43,47 A/D変換部
45 伝搬距離演算手段
46 同期検波部
48 伝搬距離演算部
50 対象物位置演算手段
51 補正手段
52 記憶部
53 補正部
65 第2の分離手段
66 第2の受光素子
67 集光レンズ
83 クロック生成部
84 装置ID情報付与手段
88 受信手段
91 開閉手段
93 制御部
98 検波手段
99 クロック検出手段
101 同期手段
102 記憶手段
103 駆動回路
A,C,D,J,K 光信号
B,P 照射領域
d,L,M,N 距離
E 鏡像位置
F スポット像
G1,G2 重心位置
H 交点
V 方向ベクトル
【技術分野】
【0001】
本発明は、位置検出装置に係り、特に対象物の三次元空間上の位置を検出する位置検出装置に関する。
【背景技術】
【0002】
従来の位置検出装置としては、例えば、レーザ光を用いたものがある。レーザ光を用いる位置検出装置は、レーザ光源と、ミラーが取り付けられ、レーザ光源からの出射レーザ光を反射して反射レーザ光を偏向させるガルバノメータスキャナ(機械的駆動部)と、出射レーザ光と反射レーザ光とを選別するビームスプリッタと、反射レーザ光を検出するフォトディテクタと、対象物の位置を測定する距離測定装置とを有する。
【0003】
このような位置検出装置は、機械的駆動部であるガルバノメータスキャナによりミラーの反射面を制御させ、対象物からの再帰反射を受けた際の反射レーザ光の照射方向と、距離測定装置が求める反射レーザ光から対象物までの距離とに基づいて、対象物の三次元空間上の位置の検出を行う(例えば、特許文献1参照。)。
【特許文献1】特開2001−147269号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の位置検出装置では、機械的に動作するガルバノメータスキャナによりミラーを可動させてレーザ光をスキャンさせるため、騒音の問題や、機械的振動により検出された対象物の三次元空間上の位置精度が低下してしまうという問題があった。
【0005】
また、ガルバノメータスキャナ(機械的駆動部)を用いているため、位置検出装置を小型化できないという問題があった。さらに、レーザ光を用いているため、安全対策のための機構を設ける必要があり、これにより位置検出装置が小型化できないという問題があった。
【0006】
また、レーザ光をスキャンさせて対象物の位置の計測を行うため、計測の時間間隔をスキャン時間以下にできない。このため、移動する対象物からの反射レーザ光の応答性が低下して、検出された対象物の三次元空間上の位置の精度が低下するという問題があった。
【0007】
そこで、本発明は上記の点に鑑みてなされたものであり、対象物の位置を高精度に求めることができると共に、小型化が可能な位置検出装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の一観点によれば、対象物の位置を検出する位置検出装置において、光信号を照射する光源と、前記対象物に取り付けられ、前記光信号を反射する反射面を備えた反射手段と、前記光信号と反射手段により反射された光信号とを分離する第1の分離手段と、前記反射された光信号を受光する第1の受光素子と、前記第1の受光素子の出力信号に基づき、該第1の受光素子の受光面における反射された光信号の位置を求める反射位置演算手段と、前記光源から第1の受光素子までの伝搬距離を求める伝搬距離演算手段と、前記反射位置演算手段に求められた第1の受光素子の受光面における反射された光信号の位置と、前記伝搬距離演算手段に求められた伝搬距離とに基づき、前記対象物の位置を求める対象物位置演算手段とを有することを特徴とする位置検出装置が提供される。
【0009】
本発明によれば、光信号と反射手段により反射された光信号とを分離する第1の分離手段を設けることにより、光信号を所定の範囲に照射することが可能となり、光信号を偏向させる機械的駆動部(ガルバノメータスキャナ)が不要となる。これにより、機械的振動がなくなり、対象物の位置を高精度に求めることができると共に、位置検出装置を小型化することができる。また、反射位置演算手段と、伝搬距離演算手段と、対象物位置演算手段とを設けることにより、第1の受光素子の受光面における反射された光信号の位置と、光源から第1の受光素子までの伝搬距離とに基づいて、対象物位置演算手段により対象物の位置を求めることができる。
【発明の効果】
【0010】
本発明は、対象物の位置を高精度に求めることができると共に、小型化が可能な位置検出装置を実現することができる。
【発明を実施するための最良の形態】
【0011】
次に、図面に基づいて本発明の実施の形態について説明する。
【0012】
(第1の実施の形態)
図1を参照して、第1の実施の形態の位置検出装置10について説明する。図1は、第1の実施の形態の位置検出装置の概略構成図である。なお、図1において、Aは第1の分離手段21により同図の下方に分離された光源15から照射された光信号(以下、「光信号A」とする)、Bは光信号Aが照射される領域(以下、「照射領域B」とする)、Cは反射手段により反射された光信号A(以下、「光信号C」とする)、Eは光源15の鏡像位置(以下、「鏡像位置E」とする)、Fは第1の受光素子26の受光面26Aにおける光信号Cのスポット像(以下、「スポット像F」とする)をそれぞれ示している。また、同図中において、X,X方向は第1の受光素子26の受光面26Aと平行な方向、Z,Z方向は第1の受光素子26の受光面26Aに垂直な方向をそれぞれ示している。
【0013】
位置検出装置10は、装置本体11と、演算手段12とを有する。位置検出装置10は、対象物24の三次元空間上の位置を検出するためのものである。位置検出装置10は、情報端末13と接続されており、情報端末13に対象物24の三次元空間上の位置に関するデータが表示される。情報端末13は、例えば、パーソナル・コンピュータ等である。
【0014】
装置本体11は、光信号発生部14と、集光レンズ20と、第1の分離手段21と、再帰光学系を備える反射手段22と、第1の受光素子26とを有する。
【0015】
光信号発生部14は、光源15と、光源駆動部16と、光信号変調手段18と、光信号制御手段19とを有する。光源15は、光信号を発生させるためのものである。光源15は、第1の分離手段21の面21Aに光信号を照射可能な位置に配設されている。光源15としては、例えば、赤外光を照射可能な赤外光LEDを用いるとよい。
【0016】
このように、光源15として赤外光LEDを用いることにより、従来のレーザ光を用いた位置検出装置において必要であった安全対策の機構が不要となり、位置検出装置10を小型化することができる。
【0017】
光源駆動部16は、光源15を駆動させるためのものである。光信号変調手段18は、光信号制御手段19により制御された出力信号により、光源駆動部16の出力信号を変調させる。具体的には、光信号変調手段18は、光源15から照射される光信号の強度、位相、及び周波数のいずれか一つを変調させる。なお、本実施の形態では、光信号の強度を変調させる場合を例に挙げて以下の説明をする。光信号変調手段18としては、例えば、発振器を用いることができる。光信号制御手段19は、光信号変調手段18の出力信号を制御するためのものである。
【0018】
このように、光源15から照射される光信号の強度、位相、及び周波数のいずれか一つを変調させる光信号変調手段18を設けることにより、光信号変調手段18の変調信号と反射戻り光からの復調信号との比較により光信号の伝播時間が算出可能となり、対象物24までの距離が算出することができる。
【0019】
集光レンズ20は、光源15と第1の分離手段21との間に設けられている。集光レンズ20は、後述する第1の受光素子26の受光面26Aに形成される光信号Cのスポット像Fを小さくするためのものである。
【0020】
第1の分離手段21は、第1の受光素子26の受光面26Aと第1の分離手段21の面21Aとが45度の角度を成すように配置されている。第1の分離手段21は、可動することはなく、その位置は固定されている。第1の分離手段21は、光信号Aを図1の下方に照射させて照射領域Bを形成するためのものである。第1の分離手段21としては、例えば、反射率を50%程度に設定した反透過性のミラーを用いることができる。
【0021】
このように、第1の分離手段21を設け、第1の分離手段21により光信号Aが照射される照射領域Bを形成することにより、対象物24に光信号を照射するための機械的駆動部(例えば、ガルバノメータスキャナ)が不必要となり、機械的振動の問題が解消されて、対象物24の三次元空間上の位置を高精度に求めることができると共に、位置検出装置10の小型化を図ることができる。
【0022】
図2は、反射手段の断面図であり、図3は反射シートを拡大した斜視図である。なお、図2において、図1と同一構成部分には同一の符号を付す。
【0023】
図2に示すように、反射手段22は、シート状基材23と、反射シート25とを有しており、三次元空間上の位置を検出したい対象物24に取り付けられている。反射シート25は、シート状基材23上に設けられている。図3に示すように、反射シート25は、複数の三角錐型の反射体28により構成されている。反射体28は、光信号Aを反射させるための反射面28Aを有している。また、複数の反射体28は、反射面28Aが互いに90度の角度を成すように配列されている。反射面28Aにより反射された光信号Aは光信号Cとなり、光信号Cは光信号Aの光路を略正確に逆行し、第1の分離手段21による光源15の鏡像位置Eで光源15と略等しいサイズのスポット像を形成する。なお、対象物24としては、例えば、人間や携帯機器(例えば、PDA等)等が挙げられる。
【0024】
図4は、第1の受光素子の斜視図である。なお、図4において、G1は第1の受光素子26の受光面26Aの重心位置(以下、「重心位置G1」とする)、G2は光信号Cのスポット像Fの重心位置(以下、「重心位置G2」とする)、Vは第1の受光素子26の受光面26Aに入射した光信号Cの方向ベクトル(以下、「方向ベクトルV」とする)、Y,Y方向はX,X方向と直交する方向をそれぞれ示している。また、図4において、図1と同一構成部分には同一の符号を付す。
【0025】
図4に示すように、第1の受光素子26は、光信号Cを受光する受光面26Aと、受光面26Aの4辺に設けられた4つの電極27とを有する。4つの電極27は、後述する増幅器29A〜29Dのいずれか1つと接続されている。受光面26Aが光信号Cを受光した際、4つの電極27は、受光面26Aにおける光信号Cのスポット像Fから各電極27までの抵抗に応じた電流を増幅器29A〜29Dに出力する。
【0026】
上記構成とされた第1の受光素子26は、光源15の鏡像位置Eから光信号Cの進行方向側に距離d離れた光信号Cの光路上に設けられている(図1参照)。なお、距離dは、オフセット量である。また、第1の受光素子26としては、例えば、受光面26Aの抵抗が均一なPIN型フォトダイオードを用いることができる。
【0027】
次に、図1を参照して、演算部12について説明する。演算部12は、増幅器29A〜29Dと、フィルタ31A〜31Dと、出力電流受信手段33と、反射位置演算手段41と、伝搬距離演算手段45と、対象物位置演算手段50と、補正手段51とを有する。
【0028】
増幅器29A〜29Dは、第1の受光素子26の4つの電極27及びフィルタ31A〜31Dと接続されている。増幅器29A〜29Dは、第1の受光素子26の受光面26Aが光信号Cを受光した際、電極27からの出力電流(出力信号)を増幅させて、フィルタ31A〜31Dに送信する。増幅器29A〜29Dとしては、例えば、アンプを用いることができる。
【0029】
フィルタ31A〜31Dは、増幅器29A〜29Dにより増幅された出力電流からノイズを除去するためのものである。フィルタ31A〜31Dとしては、例えば、バンドパスフィルタを用いることができる。
【0030】
出力電流受信手段33は、検波部34と、判定器35と、同期部36と、復調部37とを有する。出力電流受信手段33は、検波部34がフィルタ31A〜31Dを通過した出力電流の和を受信した際、反射光の変調信号復調用受信信号を生成して、復調部37から対象物位置演算手段50にクロック信号等の同期信号(具体的には、この信号に同期させてスポット位置の判定、及び方向ベクトルVの情報の算出などに使用)を送信する。
【0031】
反射位置演算手段41は、反射位置演算部42と、A/D変換部43とを有する。反射位置演算部42は、フィルタ31A〜31D及びA/D変換部43と接続されている。反射位置演算部42は、フィルタ31A〜31Dを通過した出力電流に基づき、第1の受光素子26の受光面26Aの重心位置G1を原点(つまり、重心位置G1の座標が(X,Y,Z)=(0,0,0))とした場合の光信号Cのスポット像Fの重心位置G2(以下、重心位置G2の座標を(X,Y,Z)=(X1,Y1,0)とする)を求める。
【0032】
なお、重心位置G1が光軸上に存在する場合、第1の受光素子26の受光面26Aに入射した光信号Cの方向ベクトルVは、下記(1)式により算出できる。
【0033】
V=(−X1,−Y1,0) ・・・(1)
A/D変換部43は、反射位置演算部42及び対象物位置演算手段50と接続されており、反射位置演算部42により求められる光信号Cの重心位置G2に関するデータをA/D変換して、対象物位置演算手段50に送信する。
【0034】
伝搬距離演算手段45は、同期検波部46と、A/D変換部47と、伝搬距離演算部48とを有する。同期検波部46は、光信号変調手段18と接続されている。同期検波部46は、所定の周波数で正弦波を生成する光信号変調手段18の出力信号により、光源駆動部16を介して光源15の強度を変調駆動させて、光信号Aが照射された際のフィルタ31A〜31Dを通過した電極27の出力電流の和を光信号変調手段18の信号(強度変調信号)で同期検波して位相情報を得る。この位相情報は、A/D変換部47に送信される。
【0035】
A/D変換部47は、同期検波部46及び伝搬距離演算部48と接続されている。A/D変換部47は、同期検波部46で得られた位相情報をA/D変換して、伝搬距離演算部48に送信する。伝搬距離演算部48は、A/D変換された位相情報に基づいて、伝搬時間を検出し、光源15から受光素子26の受光面26Aまでの伝搬距離(以下、「伝搬距離r1」とする)を求めると共に、伝搬距離r1に関するデータを対象物位置演算手段50に送信する。
【0036】
対象物位置演算手段50は、演算部12の制御全般を行なうと共に、反射位置演算手段41により求められる光信号Cのスポット像Fの重心位置G2と、伝搬距離演算手段45により求められる伝搬距離r1とに基づいて、反射手段22が取り付けられた対象物24の三次元空間上の位置を求める。
【0037】
ここで、図1及び図5を参照して、対象物24の三次元空間上の位置の求め方(重心位置G1を原点とした場合)について説明する。図5は、対象物の三次元空間上の位置の求め方を説明するための図である。なお、図5において、Lは重心位置G1から反射手段22までの距離(以下、「距離L」とする)、tV(tは任意の実数)は方向ベクトルVを有し、重心位置G1を通過する直線(以下、「直線tV」とする)をそれぞれ示している。
【0038】
先に説明した図4における座標系を対象物24が存在する三次元空間の座標系とした場合、伝搬距離r1は、重心位置G1から反射手段22までの距離Lの2倍から距離d(オフセット量)を引いた値と等しくなり、下記(2)式が成り立つ。
【0039】
r1=2L−d ・・・(2)
これにより、重心位置G1から反射手段22までの距離Lは、下記(3)式により求めることができる。
【0040】
L=(r1+d)/2 ・・・(3)
したがって、図5に示すように、対象物24の三次元空間上の位置は、重心位置G1を中心とする半径が距離Lと等しい大きさの半球面と直線tVとの交点Hとして求めることができる。
【0041】
また、例えば、室内に存在する対象物24の三次元空間上の位置を検出する場合、位置検出装置10に接続された情報端末13に設置位置情報(例えば、室内の間取りに関する情報や、室内の間取りに対する第1の受光素子26や第1の分離手段21等の設置位置の情報)を記憶させ、対象物24の三次元空間上の位置と上記設置位置情報とを照合することで、室内における対象物24の位置を特定することができる。
【0042】
補正手段51は、記憶部52と、補正部53とを有する。記憶部52は、補正部53及び対象物位置演算手段50と接続されている。補正手段51は、予め求められた基準データや、補正部53から得られた補正データ等を記憶する。なお、基準データとは、既知の位置に関するデータ(座標データ)のことである。
【0043】
補正部53は、記憶部52及び対象物位置演算手段50と接続されている。補正部53は、記憶部52に格納された基準データと、所定の位置に対象物24を配置させたときのデータとの差に基づき、補正データを求めると共に、補正データを記憶部52に記憶させる。
【0044】
また、対象物位置演算手段50は、記憶部52に格納された補正データに基づいて、対象物24の三次元空間上の位置の補正を行う。
【0045】
このように、補正手段51を設け、補正手段51が求めた補正データに基づいて、対象物位置演算手段50が対象物24の三次元空間上の位置の補正することにより、対象物24の三次元空間上の位置を高精度に求めることができる。
【0046】
以上、説明したように、本実施の形態の位置検出装置10によれば、第1の分離手段21により光信号Aが照射される照射領域Bを形成することにより、対象物24に光信号Aを照射するための機械的駆動部(例えば、ガルバノメータスキャナ)が不必要となり、機械的振動の問題が解消されて、対象物24の三次元空間上の位置を高精度に求めることができると共に、位置検出装置10の小型化を図ることができる。
【0047】
なお、位置検出装置10に、開口部(ピンホール)を有する板状部材を設けてもよい。この場合、光源15の鏡像位置Eが上記開口部に収まるように板状部材を配置するとよい。このような板状部材を設けることにより、受光素子26の受光面26Aに形成される光信号Cのスポット像Fのボケを低減させて、反射位置演算部42によりスポット像Fの重心位置G2を精度良く求めることができる。
【0048】
また、光信号Aの光路及び/または光信号Cの光路に、光源15の波長以外の光を遮光する遮光手段(例えば、フィルタ)を設けてもよい。このような遮光手段を設けることにより、室内照明や外光等の不要な光を除去して、電極27の出力電流のS/N比を向上させることができる。
【0049】
さらに、伝搬距離演算手段45としては、上記説明した変調法の他に、パルス光の伝搬時間を計測する方法を用いてもよい。
【0050】
(第2の実施の形態)
図6を参照して、第2の実施の形態の位置検出装置60について説明する。図6は、第2の実施の形態の位置検出装置の概略構成図である。なお、図6において、Mは光源15の鏡像位置Eから集光レンズ67までの距離(以下、「距離M」とする)、Nは集光レンズ67から第2の受光素子66の受光面66Aまでの距離(以下、「距離N」とする)、Dは第2の分離手段65により第2の受光素子66に向かうように分離された光信号C(以下、「光信号D」とする)をそれぞれ示している。また、図6において、図1に示した位置検出装置10と同一構成部分には同一の符号を付し、その説明を省略する。
【0051】
位置検出装置60は、装置本体61と、演算手段62とを有し、情報端末13と接続されている。装置本体61は、第1の実施の形態で説明した装置本体11の構成に、さらに第2の分離手段65と、第2の受光素子66と、集光レンズ67とを設けた構成とされている。
【0052】
第2の分離手段65は、光信号Cを第1の受光素子26側に通過させると共に、光信号Cの一部を第2の受光素子66に向かうようにするためのものである。第2の分離手段65は、第2の分離手段65の面65Aと第2の受光素子66の受光面66Aとが45度の角度を成すように、光源15の鏡像位置Eに配置されている。第2の分離手段65としては、例えば、ハーフミラーを用いることができる。
【0053】
第2の受光素子66は、第1の受光素子26よりも受光面の面積が小さく、応答速度の速い受光素子であり、第2の分離手段65により分離された光信号Dを受光する。第2の受光素子66としては、例えば、通常の光通信に用いるPINフォトダイオード等を用いることができる。
【0054】
また、第2の受光素子66は、増幅器71及びフィルタ72を介して、同期検波部46及び検波部34と接続されている。つまり、本実施の形態の位置検出装置60では、第2の受光素子66からの出力電流(出力信号)に基づいて、伝搬距離演算手段33が光源15から第2の受光素子66までの伝搬距離r2を求める構成とされている。
【0055】
ここで、第2の受光素子66を設ける理由について説明する。一般的に、受光素子は、受光面の面積が大きいほど応答速度は低下する。例えば、数メートルの距離範囲を検出する際には数MHz以上の変調信号を適用することが望ましいため、第1の受光素子26からの出力信号により光信号Cのスポット像Fの重心位置G2と光源15から第1の受光素子26までの伝搬距離r1とを求める構成とした場合には、受光素子の受光面の面積をあまり小さくできない。
【0056】
したがって、第1の受光素子26の他に、受光面66Aの面積が小さく応答速度の速い第2の受光素子66を設け、第2の受光素子66からの出力電流に基づいて、伝搬距離演算手段33により光源15から第2の受光素子66までの伝搬距離r2を求めることで伝搬距離r2の精度を向上させることが可能となる。これにより、伝搬距離r2と光信号Cのスポット像Fの重心位置G2とに基づいて、対象物位置演算手段50は対象物24の三次元空間上の位置を高精度に求めることができる。
【0057】
集光レンズ67は、第2の受光素子66と第2の分離手段65との間に配置されている。また、光源15の鏡像位置Eから集光レンズ67までの距離Mと、集光レンズ67から第2の受光素子65の受光面65Aまでの距離Nとは、それぞれ集光レンズ67の焦点距離fの2倍となるように設定されている。
【0058】
このように、距離M,Nのそれぞれが焦点距離fの2倍となるように集光レンズ67を配置することにより、対象物24の三次元空間上の位置に依存することなく、第2の受光素子66は光信号Dを受光することができる。
【0059】
演算手段62は、第1の実施の形態で説明した演算手段12の構成に、さらに増幅器71と、フィルタ72とを設けると共に、フィルタ72を同期検波部46及び検波部34と接続させた構成とされている。
【0060】
増幅器71は、第2の受光素子66と接続されている。増幅器71は、第2の受光素子66の受光面66Aが光信号Dを受光した際、第2の受光素子66からの出力電流を増幅させて、フィルタ72に送信する。増幅器71としては、例えば、アンプを用いることができる。
【0061】
フィルタ72は、増幅器71により増幅された出力電流からノイズを除去するためのものである。フィルタ72としては、例えば、バンドパスフィルタを用いることができる。
【0062】
以上、説明したように、本実施の形態の位置検出装置60によれば、第1の受光素子26よりも応答速度の速い第2の受光素子66からの出力電流に基づいて、伝搬距離演算手段33が伝搬距離r2を求めることにより、伝搬距離r2の精度を向上させることができる。また、伝搬距離r1の代わりに伝搬距離r2を用いることにより、対象物24の三次元空間上の位置を高精度に求めることができる。
【0063】
なお、伝搬距離r2を用いて対象物24の三次元空間上の位置を求める場合も、第1の実施の形態の位置検出装置10と同様な手法を用いることができる。
【0064】
(第3の実施の形態)
図7を参照して、第3の実施の形態の位置検出装置80について説明する。図7は、第3の実施の形態の位置検出装置の概略構成図である。なお、図7において、Jは光源15から照射された光信号、及び第1の分離手段21により同図の下方に分離された光源15から照射された光信号(以下、「光信号J」とする)、Kは反射手段85に反射された光信号J(以下、「光信号K」とする)、Pは光信号Kが照射される領域(以下、「照射領域P」とする)をそれぞれ示している。また、図7において、図1に示した位置検出装置10と同一構成部分には同一の符号を付し、その説明を省略する。
【0065】
位置検出装置80は、装置本体81と、演算手段12とを有し、情報端末13と接続されている。装置本体81は、集光レンズ20と、第1の分離手段21と、第1の受光素子26と、光信号発生部82と、再帰光学系を備える反射手段85とを有する。つまり、本実施の形態の位置検出装置80は、第1の実施の形態で説明した位置検出装置10と光信号発生部及び反射手段の構成が異なる以外は、位置検出装置10と同様な構成とされている。
【0066】
図8は、本実施の形態の光信号発生部のブロック図である。なお、図8において、図1に示した光信号発生部14と同一構成部分には同一の符号を付す。
【0067】
図8に示すように、光信号発生部82は、光源15と、光源駆動部16と、光信号変調手段18と、光信号制御手段19と、クロック生成部83と、装置ID情報付与手段84とを有する。
【0068】
クロック生成部83は、クロック信号を生成し、光信号変調手段18からの出力信号にクロック信号を付与するためのものである。装置ID情報付与手段84は、光信号変調手段18からの出力信号に装置ID情報をデジタル信号として付与するためのものである。装置ID情報とは、例えば、位置検出装置80に一意の付与された装置固有のナンバー等の情報のことである。また、光源15からは、クロック信号、装置ID情報、及び光信号変調手段18からの出力信号を含んだ光信号Jが照射される。
【0069】
図9は、反射手段の概略構成図である。なお、図9において、図2に示した反射手段22と同一構成部分には同一の符号を付す。
【0070】
図9に示すように、反射手段85は、シート状基材23と、受信手段88と、複数の三角錐型の反射体28と、開閉手段91と、制御部93とを有する。受信手段88は、シート状基材23の面23Aに設けられると共に、後述する制御部93の増幅器94と接続されている。受信手段88は、クロック信号、装置ID情報、及び光信号変調手段18からの出力信号を含んだ光信号Jを受信するためのものである。また、受信手段88は、光信号Jを受信した際、増幅器94に出力信号を送信する。
【0071】
開閉手段91は、シート状基材23の面23Aに設けられた複数の反射体28を覆うように配設されている。開閉手段91は、後述する制御部93の駆動回路103と接続されている。開閉手段91は、反射体28に光信号Jを照射させるか否かの切り換えを行なうためのものである。開閉手段91は、制御部93により受信手段88が受信する光信号Jに応じて、開閉が制御される。
【0072】
開閉手段91が開いた場合(図8に示した状態)には、光信号Jが開閉手段91を通過して反射体28に到達し、反射体28の反射面28Aにより光信号Jは光信号Kとして反射される。また、開閉手段91が閉じた場合には、開閉手段91の表面で光信号Jが遮断され、反射体28に光信号Jが到達しないため、光信号Kは反射されない。なお、反射手段85は、図示していない駆動電源を有しており、この駆動電源により開閉手段91が駆動される。
【0073】
開閉手段91としては、例えば、液晶変調素子を用いることができる。開閉手段91として液晶変調素子を用いることにより、開閉手段91を低電圧駆動させることができる。この場合、駆動電源としては、小型のバッテリー、光発電素子等を用いることができる。
【0074】
制御部93は、増幅器94と、フィルタ96と、検波手段98と、クロック検出手段99と、同期手段101と、記憶手段102と、駆動回路103とを有する。増幅器94は、受信手段88及びフィルタ96と接続されている。増幅器94は、受信手段88が受信した光信号Jを増幅させて、フィルタ96に送信する。増幅器94としては、例えば、アンプを用いることができる。
【0075】
フィルタ96は、増幅器94及び検波手段98と接続されている。フィルタ96は、増幅器94により増幅された光信号Jからノイズを除去する。フィルタ96としては、例えば、バンドパスフィルタを用いることができる。
【0076】
検波手段98は、フィルタ96及びクロック検出手段99と接続されている。検波手段98は、増幅された光信号Jを復調させて、復調された光信号Jをクロック検出手段99に送信するためのものである。
【0077】
クロック検出手段99は、検波手段98及び同期手段101と接続されている。クロック検出手段99は、復調された光信号Jに含まれるクロック信号を検出するためのものである。クロック信号が検出された光信号Jは、同期手段101に送信される。
【0078】
同期手段101は、クロック検出手段99及び駆動回路103と接続されている。同期手段101は、クロック検出手段99が検出したクロック信号により光信号Jを同期させ、同期させた光信号Jを駆動回路103に送信する。
【0079】
記憶手段102は、ユニークID情報を記憶するためのものであり、駆動回路103と接続されている。ユニークID情報とは、例えば、反射手段85に一意の付与された固有のナンバーや、反射手段85が設けられた対象物24に固有の固体情報番号等の情報である。
【0080】
駆動回路103は、同期手段101、記憶手段102、及び開閉手段91と接続されている。
【0081】
本実施の形態の位置検出装置80によれば、光信号Jの照射領域P内に反射手段85を備える対象物24が複数存在する場合、始めに、全ての反射手段85の開閉手段91が光信号Jを遮断するように各制御部93により制御を行い、その後、適当な時間が経過した後に光信号Jを反射するよう各開閉手段91を制御することで、各反射手段85から反射される光信号Kの時間的重なりをなくして、複数の対象物24の三次元空間上の位置を検出することができる。
【0082】
なお、伝搬距離演算手段45として変調法の代わりにパルス光の伝搬時間を計測する方法を用いる場合には、開閉手段91により通過させるパルス光を選択するパルス位置変調方式(PPM)を通信方法として併用してもよい。パルス位置変調方式(PPM)を併用することにより、対象物24との間でID情報や制御情報等の送受信を行なうことができる。
【0083】
以上、本発明の好ましい実施の形態について詳述したが、本発明はかかる特定の実施の形態に限定されるものではなく、特許請求の範囲内に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。なお、撮像素子(例えば、CCD)を用いて、光信号C,Kのスポット像を直接観測して、光信号C,Kのスポット像の重心位置を検出してもよい。
【産業上の利用可能性】
【0084】
本発明は、対象物の位置を高精度に求めることができると共に、小型化が可能な位置検出装置に適用できる。
【図面の簡単な説明】
【0085】
【図1】第1の実施の形態の位置検出装置の概略構成図である。
【図2】反射手段の断面図である。
【図3】反射シートを拡大した斜視図である。
【図4】第1の受光素子の斜視図である。
【図5】対象物の三次元空間上の位置の求め方を説明するための図である。
【図6】第2の実施の形態の位置検出装置の概略構成図である。
【図7】第3の実施の形態の位置検出装置の概略構成図である。
【図8】本実施の形態の光信号発生部のブロック図である。
【図9】反射手段の概略構成図である。
【符号の説明】
【0086】
10,60,80 位置検出装置
11,61,81 装置本体
12,62 演算手段
13 情報端末
14,82 光信号発生部
15 光源
16 光源駆動部
18 光信号変調手段
19 光信号制御手段
20 集光レンズ
21 第1の分離手段
21A,23A,65A 面
22,85 反射手段
23 シート状基材
24 対象物
25 反射シート
26 第1の受光素子
26A,66A 受光面
27 電極
28 反射体
28A 反射面
29A〜29D,71,94 増幅器
31A〜31D,72,96 フィルタ
33 出力電流受信手段
34 検波部
35 判定器
36 同期部
37 復調部
41 反射位置演算手段
42 反射位置演算部
43,47 A/D変換部
45 伝搬距離演算手段
46 同期検波部
48 伝搬距離演算部
50 対象物位置演算手段
51 補正手段
52 記憶部
53 補正部
65 第2の分離手段
66 第2の受光素子
67 集光レンズ
83 クロック生成部
84 装置ID情報付与手段
88 受信手段
91 開閉手段
93 制御部
98 検波手段
99 クロック検出手段
101 同期手段
102 記憶手段
103 駆動回路
A,C,D,J,K 光信号
B,P 照射領域
d,L,M,N 距離
E 鏡像位置
F スポット像
G1,G2 重心位置
H 交点
V 方向ベクトル
【特許請求の範囲】
【請求項1】
対象物の位置を検出する位置検出装置において、
光信号を照射する光源と、
前記対象物に取り付けられ、前記光信号を反射する反射面を備えた反射手段と、
前記光信号と反射手段により反射された光信号とを分離する第1の分離手段と、
前記反射された光信号を受光する第1の受光素子と、
前記第1の受光素子の出力信号に基づき、該第1の受光素子の受光面における反射された光信号の位置を求める反射位置演算手段と、
前記光源から第1の受光素子までの伝搬距離を求める伝搬距離演算手段と、
前記反射位置演算手段に求められた第1の受光素子の受光面における反射された光信号の位置と、前記伝搬距離演算手段に求められた伝搬距離とに基づき、前記対象物の位置を求める対象物位置演算手段とを有することを特徴とする位置検出装置。
【請求項2】
光信号変調手段を有し、
前記光信号変調手段は、前記光信号の強度、位相、及び周波数のいずれか一つを変調させることを特徴とする請求項1に記載の位置検出装置。
【請求項3】
開口部を有する板状部材を備え、
前記板状部材は、前記光源の鏡像位置が前記開口部に収まるように配置されることを特徴とする請求項1または2に記載の位置検出装置。
【請求項4】
前記反射手段は、前記光信号を受信する受信手段と、前記反射手段の反射面を覆うように設けられる開閉手段とを有し、
前記開閉手段は、前記受信手段が受信した光信号に応じて開閉することを特徴とする請求項1〜3のいずれか一項に記載の位置検出装置。
【請求項5】
前記第1の分離手段と第1の受光素子との間に設けられ、前記反射手段に反射された光信号のうち第1の分離手段を通過した光信号を分離する第2の分離手段と、該第2の分離手段により分離された光信号を受光する第2の受光素子とを有し、
前記伝搬距離演算手段は、前記光源から第2の受光素子までの伝搬距離を求めることを特徴とする請求項1〜4のいずれか一項に記載の位置検出装置。
【請求項6】
補正手段を有し、
前記補正手段は、予め求められた基準データと、所定の位置に対象物を配置させたときのデータとの差に基づき、補正データを求め、
前記対象物位置演算手段は、前記補正データに基づき、補正された対象物の位置を求めることを特徴とする請求項1〜5のいずれか一項に記載の位置検出装置。
【請求項7】
前記光信号の光路及び/または反射された光信号の光路に、前記光源の波長以外の光を遮光する遮光手段を設けることを特徴とする請求項1〜6のいずれか一項に記載の位置検出装置。
【請求項8】
前記光源は、赤外光を照射することを特徴とする請求項1〜7のいずれか一項に記載の位置検出装置。
【請求項1】
対象物の位置を検出する位置検出装置において、
光信号を照射する光源と、
前記対象物に取り付けられ、前記光信号を反射する反射面を備えた反射手段と、
前記光信号と反射手段により反射された光信号とを分離する第1の分離手段と、
前記反射された光信号を受光する第1の受光素子と、
前記第1の受光素子の出力信号に基づき、該第1の受光素子の受光面における反射された光信号の位置を求める反射位置演算手段と、
前記光源から第1の受光素子までの伝搬距離を求める伝搬距離演算手段と、
前記反射位置演算手段に求められた第1の受光素子の受光面における反射された光信号の位置と、前記伝搬距離演算手段に求められた伝搬距離とに基づき、前記対象物の位置を求める対象物位置演算手段とを有することを特徴とする位置検出装置。
【請求項2】
光信号変調手段を有し、
前記光信号変調手段は、前記光信号の強度、位相、及び周波数のいずれか一つを変調させることを特徴とする請求項1に記載の位置検出装置。
【請求項3】
開口部を有する板状部材を備え、
前記板状部材は、前記光源の鏡像位置が前記開口部に収まるように配置されることを特徴とする請求項1または2に記載の位置検出装置。
【請求項4】
前記反射手段は、前記光信号を受信する受信手段と、前記反射手段の反射面を覆うように設けられる開閉手段とを有し、
前記開閉手段は、前記受信手段が受信した光信号に応じて開閉することを特徴とする請求項1〜3のいずれか一項に記載の位置検出装置。
【請求項5】
前記第1の分離手段と第1の受光素子との間に設けられ、前記反射手段に反射された光信号のうち第1の分離手段を通過した光信号を分離する第2の分離手段と、該第2の分離手段により分離された光信号を受光する第2の受光素子とを有し、
前記伝搬距離演算手段は、前記光源から第2の受光素子までの伝搬距離を求めることを特徴とする請求項1〜4のいずれか一項に記載の位置検出装置。
【請求項6】
補正手段を有し、
前記補正手段は、予め求められた基準データと、所定の位置に対象物を配置させたときのデータとの差に基づき、補正データを求め、
前記対象物位置演算手段は、前記補正データに基づき、補正された対象物の位置を求めることを特徴とする請求項1〜5のいずれか一項に記載の位置検出装置。
【請求項7】
前記光信号の光路及び/または反射された光信号の光路に、前記光源の波長以外の光を遮光する遮光手段を設けることを特徴とする請求項1〜6のいずれか一項に記載の位置検出装置。
【請求項8】
前記光源は、赤外光を照射することを特徴とする請求項1〜7のいずれか一項に記載の位置検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2006−250716(P2006−250716A)
【公開日】平成18年9月21日(2006.9.21)
【国際特許分類】
【出願番号】特願2005−67761(P2005−67761)
【出願日】平成17年3月10日(2005.3.10)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成18年9月21日(2006.9.21)
【国際特許分類】
【出願日】平成17年3月10日(2005.3.10)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]