
位置検出装置
【課題】軟水装置のカム駆動式コントロールバルブのカム位置を短時間で検出することのできる位置検出装置を提供する。
【解決手段】本実施形態に係る位置検出装置1は、カム60の回転軸61の端部に設けられた回転体10と、フォトインタラプタ20と、ホール素子30と、制御回路50と、を備えている。回転体10の外側端面には、フォトインタラプタ20によって検出される複数の切り欠き12が円周方向に所定の間隔で形成された切り欠き板11が設けられている。また、回転体10の外側端面には、回転軸61の回転に伴って回転移動し、ホール素子30によって検出される永久磁石15が設けられている。制御回路50は、フォトインタラプタ20とホール素子30の出力から、カム60の回転位置を検出する。
【解決手段】本実施形態に係る位置検出装置1は、カム60の回転軸61の端部に設けられた回転体10と、フォトインタラプタ20と、ホール素子30と、制御回路50と、を備えている。回転体10の外側端面には、フォトインタラプタ20によって検出される複数の切り欠き12が円周方向に所定の間隔で形成された切り欠き板11が設けられている。また、回転体10の外側端面には、回転軸61の回転に伴って回転移動し、ホール素子30によって検出される永久磁石15が設けられている。制御回路50は、フォトインタラプタ20とホール素子30の出力から、カム60の回転位置を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、回転運動する部材の位置を検出する位置検出装置に関し、特に、軟水装置に設置されるカム駆動式コントロールバルブのカムの位置を検出するための位置検出装置に関する。
【背景技術】
【0002】
硬水を軟水化する軟水装置においては、通水作動や再生作動の処理工程にあわせて流路を切り換えるため、複数のバルブを同時に制御しなくてはならない。このため、コストをおさえるために、カム駆動式のコントロールバルブが用いられており、カムの回転によりバルブの開閉を制御するように構成されている。下記特許文献1には、カム駆動式のバルブを備えた軟水装置が開示されている。
【特許文献1】特開平9−297150号公報
【0003】
上記特許文献1においては、複数のカムが設置された回転軸の端部に円周方向に沿って複数の切り欠きが設けられた切り欠き板(回転体)を設置し、フォトインタラプタによりこの切り欠きを検知することで、カムの回転位置を検出する位置検出装置が開示されている。
【0004】
また、上記位置検出装置では、通水工程、呼び水工程、再生工程、押出工程及び洗浄工程にそれぞれ対応して、複数の切り欠きが切り欠き板に形成されている。通水工程に対応して設置された切り欠きは、原点位置として機能するために2つの切り欠きが連続して設けられている。
【0005】
ここで、停電によって突然電源が切れる等してカムの現在位置を見失った後、軟水装置を再起動させる場合には、現在、カムがどの位置(工程)にいるかを把握しなければ、安全に軟水装置の処理を再開することができない。上記特許文献1では、2つの切り欠きが形成された原点がフォトインタラプタによって検知されるまでカムを回転させることで、カムの位置を把握し、さらに所望の工程に対応する切り欠きまでカムを回転させて処理を再開している。
【発明の開示】
【発明が解決しようとする課題】
【0006】
このように、従来の軟水装置に設けられたカムの位置検出装置では、カムが一周する360°の間の一箇所(原点)でしか、カムの絶対位置を把握することができないため、軟水装置を再起動するときに、カムの位置把握に時間がかかってしまう。通常、
軟水装置に設置されるカムの駆動源としては、トルクの小さい小型モータが使用され、この出力をギヤダウンさせてカムを回転させているため、カムを一回転させるのに非常に時間がかかってしまう(例えば、5〜10分)。
【0007】
本発明は、上記課題を解決するためになされたものであり、軟水装置のカム駆動式コントロールバルブのカム位置を短時間で検出することのできる位置検出装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明に係る位置検出装置は、軟水装置に設置されるカム駆動式コントロールバルブのカムの位置を検出するための位置検出装置において、前記カムの回転軸と一体になって回転するように同軸に設置された回転体であって、円周方向に所定の間隔で形成され、前記回転軸の回転に伴って回転移動する複数の検出孔と、前記回転軸の回転に伴って回転移動する磁石と、が設けられた回転体と、前記検出孔を検出するための光学式センサと、前記磁石を検出するための磁気センサと、前記光学式センサ及び前記磁気センサの出力から前記カムの位置を検出する制御回路と、を備えることを特徴とする。
【発明の効果】
【0009】
本発明に係る位置検出装置によれば、軟水装置のコントロールバルブを駆動するためのカムの位置を短時間で検出することができる。
【発明を実施するための最良の形態】
【0010】
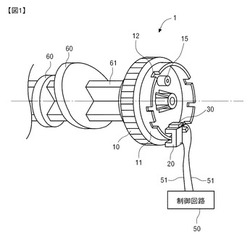
以下、図面を参照しながら、本発明の実施形態について詳細に説明する。図1は、本実施形態に係る位置検出装置の構成を概略的に示す斜視図である。本実施形態に係る位置検出装置1は、軟水装置のコントロールバルブを開閉するカムの回転位置を検出するための装置であり、軟水装置内に設置される。
【0011】
図1において、60はカム、61はカムの回転軸である。複数のカム60が回転軸61と共に回転することで、各カム60に対応する図示しないコントロールバルブの開閉が行われる。図1に示すように、位置検出装置1は、カム60の回転軸61の端部に設けられた回転体10と、フォトインタラプタ20と、ホール素子30と、制御回路50と、を備えている。
【0012】
回転体10の外側(図1の右側)の端面には、後述する検出器によって検出される検出孔としての複数の切り欠き12が形成された切り欠き板11が設けられている。切り欠き板11は、円筒の側面に相当する形状であり、回転体10の外側端面の周縁部に立設されている。
【0013】
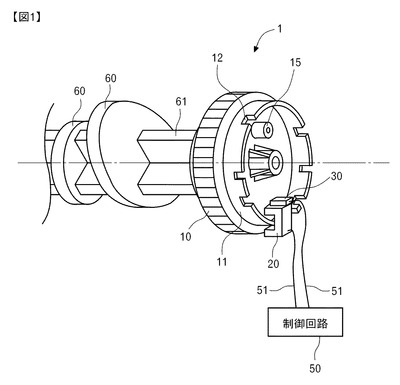
本実施形態では、切り欠き板11に、7つの切り欠き12o,12a〜12fが円周方向に所定の間隔で形成されている。図2に、切り欠き12の形成位置を説明するための切り欠き板11の一部展開図を示す。切り欠き板11は、図2に矢印で示した方向(左方向)に回転し、円周方向に所定の間隔で形成された7つの切り欠き12o,12a〜12fも共に回転する。
【0014】
ここで、本実施形態に係る軟水装置は、硬水を通して軟水化する通常の通水作動(通水工程)と、軟水装置内のイオン交換樹脂の再生を行う再生作動との2つの作動モードを有している。さらに、再生作動は、通水時と逆方向に水を流してイオン交換樹脂をほぐす逆洗工程と、イオン交換樹脂に塩水を通して再生する再生工程と、イオン交換樹脂に真水を通して塩水を押し流す押出工程と、残った塩水の洗い流しを行う水洗工程と、塩水タンクに補水を行う補水工程と、を有している。
【0015】
また、本実施形態に係る軟水装置においては、回転軸61が一回転する間に、通水工程→逆洗工程→再生工程→押出工程→水洗工程→補水工程→通水工程といったサイクルが行われるように構成されており、回転軸61の回転に伴い、カム60によって各工程に必要なコントロールバルブの開閉が行われる。
【0016】
各切り欠き12は、上記各工程に対応しており、各切り欠き12の先端側(進行方向側)端縁P1〜P6がフォトインタラプタ20によって検出されたときに、回転軸61の回転がいったん停止され、その位置で各切り欠き12に対応する工程が実行されるように構成されている。
【0017】
切り欠き12aは通水工程用の切り欠きであり、本実施形態では、原点位置を兼ねている。また、切り欠き12bは逆洗工程用の切り欠き、切り欠き12cは再生工程用の切り欠き、切り欠き12dは押出工程用の切り欠き、切り欠き12eは水洗工程用の切り欠き、切り欠き12efは補水工程用の切り欠きである。但し、切り欠き12oは原点出しのための切り欠きである。
【0018】
なお、各切り欠き12a〜12fの先端側(進行方向側)端縁P1〜P6がフォトインタラプタ20によって検知されると、フォトインタラプタ20の出力がOFF→ONに変化するので、制御回路50は、カム60が各工程の実行位置に来たことを認識することができる。
【0019】
本実施形態では、通水工程を原点としており、切り欠きを2つ連続して形成する(12o,12a)ことで、他の工程と区別している。切り欠き12oの先端側の端縁P0がフォトインタラプタ20によって検知された後に、連続して切り欠き12aの先端側端縁P1が検知されれば、制御回路50は、カムが原点である通水工程に来たことを認識することができる。
【0020】
また、本実施形態においては、各P1〜P6のカム位置で各工程を実行した後に、回転軸61によって各カム60が回転することで、次の工程に対応するように各コントロールバルブの開閉を行うが、各工程間における開閉動作に合わせて各カム60の形状や切り欠き12の間隔が設計されている。
【0021】
また、回転体10の外側端面には、永久磁石15が設置されている。永久磁石15は、円周方向において切り欠き12dと切り欠き12eとの間、すなわち、押出工程と水洗工程との中間に設置されている。また、フォトインタラプタ20とホール素子30は、円周方向において同じ位置に設置されている。
【0022】
回転軸61の回転により、永久磁石15がホール素子30の近傍を通過すると、ホール素子30が電圧ピーク値を出力する。制御回路50は、ホール素子30のピーク値を検出すると、フォトインタラプタ20の位置の切り欠き板11が、切り欠き12dと切り欠き12eとの間、すなわちカム60が押出工程と水洗工程との間に位置することを認識することができる。
【0023】
以上、本実施形態に係る位置検出装置の構成について説明したが、続いて、本実施形態において、停電等により停止し、現在位置を見失った軟水装置を再起動する場合の処理の流れについて説明する。
【0024】
なお、軟水装置では、塩水を使ってイオン交換樹脂の再生を行うため、再生工程や押出工程で停止してカム位置を見失ってしまった場合、イオン交換樹脂のところに塩水が残っている。そして、再起動後、このままの状態で通水工程から再開すると、塩分の混ざった水が軟水装置から供給されてしまい好ましくない。
【0025】
よって、本実施形態では、カム位置を見失ってしまった場合、再起動後、カム60をP5の位置まで回転させてから軟水装置による処理を再開するように、すなわち、水洗工程から軟水装置の処理を再開するように構成している。こうすれば、確実に最初にイオン交換樹脂から塩分を除去することができるので、軟水装置から塩分の混ざった水が供給されることを防げる。
【0026】
(1)P0〜永久磁石15の間で停止した場合
この場合、軟水装置を起動後、回転軸61の回転を開始すると、切り欠き12a、切り欠き12b、切り欠き12c、切り欠き12d等がフォトインタラプタ20によって検知されることになるが、制御回路50は、これらの出力から位置を認識することはできない。
【0027】
続いて、永久磁石15がホール素子30の位置を通過すると、ホール素子30からピーク値が出力されるので、制御回路50は、現在位置が、切り欠き12d〜12eの間(押出工程と水洗工程との間)にあることを認識できる。よって、次にフォトインタラプタ20の出力がOFF→ONに変化すると、制御回路50は、P5の位置に来たことを検出できる。
【0028】
P5の位置を検出した制御回路50は、そのことを示す信号を軟水装置の制御回路に出力する。カム60が水洗工程(P5)の位置に来たことを認識した軟水装置の制御回路は、水洗工程の処理を開始するように制御し、水洗工程から再生作動を再開させる。
【0029】
このように、本実施形態では、永久磁石15とホール素子30により、カム位置が押出工程(P4)と水洗工程(P5)との間にあることを検出できるので、短時間で水洗工程から軟水装置の処理を再開することができる。
【0030】
従来の切り欠きとフォトインタラプタだけの位置検出装置では、原点位置である通水工程(P1)の位置を検出しなければカム位置を把握できないため、通水工程〜押出工程(P0〜永久磁石15)で停止した場合にも、一度P0及びP1の位置まで回転させて原点出しをした後に、さらに水洗工程(P5)の位置までカムを回転させてから処理を再開する必要があった。このため、処理の再開まで10分以上かかることもあったが、本実施形態によれば、大幅に再開までの時間を短縮することができる。
【0031】
(2)永久磁石15〜P0の間で停止した場合
この場合、軟水装置を起動後、回転軸61の回転を開始すると、先に切り欠きP0及びP1がフォトインタラプタによって検出されるので、制御回路50は、通水工程(P1)位置を最初に認識することができる。そして、水洗工程(P5)の位置までカム60が回転した後に、水洗工程から軟水装置における処理が再開される。
【0032】
以上、詳細に説明した本実施形態によれば、従来の切り欠きとフォトインタラプタによるカム位置の検出に加えて、磁石とホール素子によってもカム位置を検出するように構成したので、従来のように必ずしも原点出しをしなくてもカムの位置を検出することができ、これにより短時間でカム位置を検出することが可能になった。
【0033】
また、本実施形態では、磁石とホール素子により、カム位置が押出工程(P4)と水洗工程(P5)との間にあることを検出できる。よって、軟水装置から塩分の混ざった水が供給されないように、カム位置を見失ってしまった軟水装置の処理を水洗工程から再開するにあたっての時間を大幅に短縮することができる。
【0034】
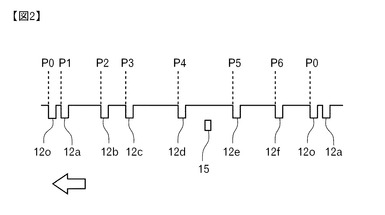
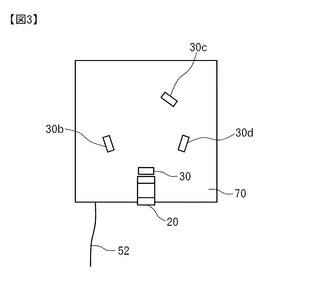
続いて、本実施形態の変形例について説明する。図3は、本変形例に係る検出素子の配置状態を示す図である。上記実施形態では、ホール素子30が1つであったが、本変形例では、さらに3つのホール素子30b,30c,30dを設置した。また、本変形例では、フォトインタラプタ20と、4つのホール素子30とを一つの基板70に実装し、配線52によってこれらと制御回路50と接続している。
【0035】
ホール素子30は、上記実施形態と同様に円周方向においてフォトインタラプタ20と同じ位置に設置されており、永久磁石15がホール素子30の位置に来たときに、カム位置は押出工程(P4)と水洗工程(P5)との中間にある。また、ホール素子30bは、永久磁石15がホール素子30の位置に来たときに、カム位置が水洗工程(P5)と補水工程(P6)との間になるような位置に設置されている。
【0036】
また、ホール素子30cは、永久磁石15がホール素子30の位置に来たときに、カム位置が通水工程(P1)と逆洗工程(P2)との中間になるような位置に設置されている。また、ホール素子30dは、永久磁石15がホール素子30の位置に来たときに、カム位置が再生工程(P3)と押出工程(P4)との中間になるような位置に設置されている。
【0037】
このような構成の本変形例によれば、上記実施形態と同様の作用効果を奏するのに加えて、ホール素子30bの出力からカム位置が水洗工程(P5)と補水工程(P6)との間にあること、ホール素子30cの出力からカム位置が通水工程(P1)と逆洗工程(P2)との間にあること、ホール素子30dの出力からカム位置が再生工程(P3)と押出工程(P4)との間にあることを、制御回路50が認識することができる。
【0038】
よって、本変形例によれば、カム位置を失った軟水装置を再起動後、さらに短期間でカム位置を把握することができ、任意の工程から処理を再開する場合の時間を大幅に短縮することができる。
【0039】
以上、変形例も含めて本実施形態について詳細に説明したが、本発明の実施の形態は、上記実施形態やその変形例に限定されるものではなく、本発明の主旨を逸脱しない範囲内で種々の変形が可能である。例えば、検出孔の形状は、切り欠きに限らず、光学的に認識できる形状であれば良い。
【0040】
また、本実施形態では、検出孔を検出するセンサとして、フォトインタラプタを用いたが、これに限らず、光源と光センサを有する光学式センサであれば、適宜他のセンサを用いることができる。
【0041】
また、本実施形態では、磁石を検出する磁気センサとしてホール素子を用いたが、磁界の大きさを測定できる磁気センサであれば、適宜他の磁気センサを用いることができる。
【0042】
また、磁石の設置位置とホール素子の設置位置も適宜変更可能であることは言うまでもない。回転体に1つの磁石が設置され、この磁石を検出するためのホール素子が少なくとも1つ設置されていれば、従来と比較して短時間にカムの位置が検出可能となる。
【図面の簡単な説明】
【0043】
【図1】図1は、本実施形態に係る位置検出装置の構成を概略的に示す斜視図である。
【図2】図2は、本実施形態に係る切り欠きの形成位置を説明するための切り欠き板の一部展開図である
【図3】図3は、本実施形態の変形例に係る検出素子の配置状態を示す図である。
【符号の説明】
【0044】
1 位置検出装置
10 回転体
11 切り欠き板
12 切り欠き
15 永久磁石
20 フォトインタラプタ
30 ホール素子
40 制御回路
51,52 配線
60 カム
61 回転軸
70 基板
【技術分野】
【0001】
本発明は、回転運動する部材の位置を検出する位置検出装置に関し、特に、軟水装置に設置されるカム駆動式コントロールバルブのカムの位置を検出するための位置検出装置に関する。
【背景技術】
【0002】
硬水を軟水化する軟水装置においては、通水作動や再生作動の処理工程にあわせて流路を切り換えるため、複数のバルブを同時に制御しなくてはならない。このため、コストをおさえるために、カム駆動式のコントロールバルブが用いられており、カムの回転によりバルブの開閉を制御するように構成されている。下記特許文献1には、カム駆動式のバルブを備えた軟水装置が開示されている。
【特許文献1】特開平9−297150号公報
【0003】
上記特許文献1においては、複数のカムが設置された回転軸の端部に円周方向に沿って複数の切り欠きが設けられた切り欠き板(回転体)を設置し、フォトインタラプタによりこの切り欠きを検知することで、カムの回転位置を検出する位置検出装置が開示されている。
【0004】
また、上記位置検出装置では、通水工程、呼び水工程、再生工程、押出工程及び洗浄工程にそれぞれ対応して、複数の切り欠きが切り欠き板に形成されている。通水工程に対応して設置された切り欠きは、原点位置として機能するために2つの切り欠きが連続して設けられている。
【0005】
ここで、停電によって突然電源が切れる等してカムの現在位置を見失った後、軟水装置を再起動させる場合には、現在、カムがどの位置(工程)にいるかを把握しなければ、安全に軟水装置の処理を再開することができない。上記特許文献1では、2つの切り欠きが形成された原点がフォトインタラプタによって検知されるまでカムを回転させることで、カムの位置を把握し、さらに所望の工程に対応する切り欠きまでカムを回転させて処理を再開している。
【発明の開示】
【発明が解決しようとする課題】
【0006】
このように、従来の軟水装置に設けられたカムの位置検出装置では、カムが一周する360°の間の一箇所(原点)でしか、カムの絶対位置を把握することができないため、軟水装置を再起動するときに、カムの位置把握に時間がかかってしまう。通常、
軟水装置に設置されるカムの駆動源としては、トルクの小さい小型モータが使用され、この出力をギヤダウンさせてカムを回転させているため、カムを一回転させるのに非常に時間がかかってしまう(例えば、5〜10分)。
【0007】
本発明は、上記課題を解決するためになされたものであり、軟水装置のカム駆動式コントロールバルブのカム位置を短時間で検出することのできる位置検出装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明に係る位置検出装置は、軟水装置に設置されるカム駆動式コントロールバルブのカムの位置を検出するための位置検出装置において、前記カムの回転軸と一体になって回転するように同軸に設置された回転体であって、円周方向に所定の間隔で形成され、前記回転軸の回転に伴って回転移動する複数の検出孔と、前記回転軸の回転に伴って回転移動する磁石と、が設けられた回転体と、前記検出孔を検出するための光学式センサと、前記磁石を検出するための磁気センサと、前記光学式センサ及び前記磁気センサの出力から前記カムの位置を検出する制御回路と、を備えることを特徴とする。
【発明の効果】
【0009】
本発明に係る位置検出装置によれば、軟水装置のコントロールバルブを駆動するためのカムの位置を短時間で検出することができる。
【発明を実施するための最良の形態】
【0010】
以下、図面を参照しながら、本発明の実施形態について詳細に説明する。図1は、本実施形態に係る位置検出装置の構成を概略的に示す斜視図である。本実施形態に係る位置検出装置1は、軟水装置のコントロールバルブを開閉するカムの回転位置を検出するための装置であり、軟水装置内に設置される。
【0011】
図1において、60はカム、61はカムの回転軸である。複数のカム60が回転軸61と共に回転することで、各カム60に対応する図示しないコントロールバルブの開閉が行われる。図1に示すように、位置検出装置1は、カム60の回転軸61の端部に設けられた回転体10と、フォトインタラプタ20と、ホール素子30と、制御回路50と、を備えている。
【0012】
回転体10の外側(図1の右側)の端面には、後述する検出器によって検出される検出孔としての複数の切り欠き12が形成された切り欠き板11が設けられている。切り欠き板11は、円筒の側面に相当する形状であり、回転体10の外側端面の周縁部に立設されている。
【0013】
本実施形態では、切り欠き板11に、7つの切り欠き12o,12a〜12fが円周方向に所定の間隔で形成されている。図2に、切り欠き12の形成位置を説明するための切り欠き板11の一部展開図を示す。切り欠き板11は、図2に矢印で示した方向(左方向)に回転し、円周方向に所定の間隔で形成された7つの切り欠き12o,12a〜12fも共に回転する。
【0014】
ここで、本実施形態に係る軟水装置は、硬水を通して軟水化する通常の通水作動(通水工程)と、軟水装置内のイオン交換樹脂の再生を行う再生作動との2つの作動モードを有している。さらに、再生作動は、通水時と逆方向に水を流してイオン交換樹脂をほぐす逆洗工程と、イオン交換樹脂に塩水を通して再生する再生工程と、イオン交換樹脂に真水を通して塩水を押し流す押出工程と、残った塩水の洗い流しを行う水洗工程と、塩水タンクに補水を行う補水工程と、を有している。
【0015】
また、本実施形態に係る軟水装置においては、回転軸61が一回転する間に、通水工程→逆洗工程→再生工程→押出工程→水洗工程→補水工程→通水工程といったサイクルが行われるように構成されており、回転軸61の回転に伴い、カム60によって各工程に必要なコントロールバルブの開閉が行われる。
【0016】
各切り欠き12は、上記各工程に対応しており、各切り欠き12の先端側(進行方向側)端縁P1〜P6がフォトインタラプタ20によって検出されたときに、回転軸61の回転がいったん停止され、その位置で各切り欠き12に対応する工程が実行されるように構成されている。
【0017】
切り欠き12aは通水工程用の切り欠きであり、本実施形態では、原点位置を兼ねている。また、切り欠き12bは逆洗工程用の切り欠き、切り欠き12cは再生工程用の切り欠き、切り欠き12dは押出工程用の切り欠き、切り欠き12eは水洗工程用の切り欠き、切り欠き12efは補水工程用の切り欠きである。但し、切り欠き12oは原点出しのための切り欠きである。
【0018】
なお、各切り欠き12a〜12fの先端側(進行方向側)端縁P1〜P6がフォトインタラプタ20によって検知されると、フォトインタラプタ20の出力がOFF→ONに変化するので、制御回路50は、カム60が各工程の実行位置に来たことを認識することができる。
【0019】
本実施形態では、通水工程を原点としており、切り欠きを2つ連続して形成する(12o,12a)ことで、他の工程と区別している。切り欠き12oの先端側の端縁P0がフォトインタラプタ20によって検知された後に、連続して切り欠き12aの先端側端縁P1が検知されれば、制御回路50は、カムが原点である通水工程に来たことを認識することができる。
【0020】
また、本実施形態においては、各P1〜P6のカム位置で各工程を実行した後に、回転軸61によって各カム60が回転することで、次の工程に対応するように各コントロールバルブの開閉を行うが、各工程間における開閉動作に合わせて各カム60の形状や切り欠き12の間隔が設計されている。
【0021】
また、回転体10の外側端面には、永久磁石15が設置されている。永久磁石15は、円周方向において切り欠き12dと切り欠き12eとの間、すなわち、押出工程と水洗工程との中間に設置されている。また、フォトインタラプタ20とホール素子30は、円周方向において同じ位置に設置されている。
【0022】
回転軸61の回転により、永久磁石15がホール素子30の近傍を通過すると、ホール素子30が電圧ピーク値を出力する。制御回路50は、ホール素子30のピーク値を検出すると、フォトインタラプタ20の位置の切り欠き板11が、切り欠き12dと切り欠き12eとの間、すなわちカム60が押出工程と水洗工程との間に位置することを認識することができる。
【0023】
以上、本実施形態に係る位置検出装置の構成について説明したが、続いて、本実施形態において、停電等により停止し、現在位置を見失った軟水装置を再起動する場合の処理の流れについて説明する。
【0024】
なお、軟水装置では、塩水を使ってイオン交換樹脂の再生を行うため、再生工程や押出工程で停止してカム位置を見失ってしまった場合、イオン交換樹脂のところに塩水が残っている。そして、再起動後、このままの状態で通水工程から再開すると、塩分の混ざった水が軟水装置から供給されてしまい好ましくない。
【0025】
よって、本実施形態では、カム位置を見失ってしまった場合、再起動後、カム60をP5の位置まで回転させてから軟水装置による処理を再開するように、すなわち、水洗工程から軟水装置の処理を再開するように構成している。こうすれば、確実に最初にイオン交換樹脂から塩分を除去することができるので、軟水装置から塩分の混ざった水が供給されることを防げる。
【0026】
(1)P0〜永久磁石15の間で停止した場合
この場合、軟水装置を起動後、回転軸61の回転を開始すると、切り欠き12a、切り欠き12b、切り欠き12c、切り欠き12d等がフォトインタラプタ20によって検知されることになるが、制御回路50は、これらの出力から位置を認識することはできない。
【0027】
続いて、永久磁石15がホール素子30の位置を通過すると、ホール素子30からピーク値が出力されるので、制御回路50は、現在位置が、切り欠き12d〜12eの間(押出工程と水洗工程との間)にあることを認識できる。よって、次にフォトインタラプタ20の出力がOFF→ONに変化すると、制御回路50は、P5の位置に来たことを検出できる。
【0028】
P5の位置を検出した制御回路50は、そのことを示す信号を軟水装置の制御回路に出力する。カム60が水洗工程(P5)の位置に来たことを認識した軟水装置の制御回路は、水洗工程の処理を開始するように制御し、水洗工程から再生作動を再開させる。
【0029】
このように、本実施形態では、永久磁石15とホール素子30により、カム位置が押出工程(P4)と水洗工程(P5)との間にあることを検出できるので、短時間で水洗工程から軟水装置の処理を再開することができる。
【0030】
従来の切り欠きとフォトインタラプタだけの位置検出装置では、原点位置である通水工程(P1)の位置を検出しなければカム位置を把握できないため、通水工程〜押出工程(P0〜永久磁石15)で停止した場合にも、一度P0及びP1の位置まで回転させて原点出しをした後に、さらに水洗工程(P5)の位置までカムを回転させてから処理を再開する必要があった。このため、処理の再開まで10分以上かかることもあったが、本実施形態によれば、大幅に再開までの時間を短縮することができる。
【0031】
(2)永久磁石15〜P0の間で停止した場合
この場合、軟水装置を起動後、回転軸61の回転を開始すると、先に切り欠きP0及びP1がフォトインタラプタによって検出されるので、制御回路50は、通水工程(P1)位置を最初に認識することができる。そして、水洗工程(P5)の位置までカム60が回転した後に、水洗工程から軟水装置における処理が再開される。
【0032】
以上、詳細に説明した本実施形態によれば、従来の切り欠きとフォトインタラプタによるカム位置の検出に加えて、磁石とホール素子によってもカム位置を検出するように構成したので、従来のように必ずしも原点出しをしなくてもカムの位置を検出することができ、これにより短時間でカム位置を検出することが可能になった。
【0033】
また、本実施形態では、磁石とホール素子により、カム位置が押出工程(P4)と水洗工程(P5)との間にあることを検出できる。よって、軟水装置から塩分の混ざった水が供給されないように、カム位置を見失ってしまった軟水装置の処理を水洗工程から再開するにあたっての時間を大幅に短縮することができる。
【0034】
続いて、本実施形態の変形例について説明する。図3は、本変形例に係る検出素子の配置状態を示す図である。上記実施形態では、ホール素子30が1つであったが、本変形例では、さらに3つのホール素子30b,30c,30dを設置した。また、本変形例では、フォトインタラプタ20と、4つのホール素子30とを一つの基板70に実装し、配線52によってこれらと制御回路50と接続している。
【0035】
ホール素子30は、上記実施形態と同様に円周方向においてフォトインタラプタ20と同じ位置に設置されており、永久磁石15がホール素子30の位置に来たときに、カム位置は押出工程(P4)と水洗工程(P5)との中間にある。また、ホール素子30bは、永久磁石15がホール素子30の位置に来たときに、カム位置が水洗工程(P5)と補水工程(P6)との間になるような位置に設置されている。
【0036】
また、ホール素子30cは、永久磁石15がホール素子30の位置に来たときに、カム位置が通水工程(P1)と逆洗工程(P2)との中間になるような位置に設置されている。また、ホール素子30dは、永久磁石15がホール素子30の位置に来たときに、カム位置が再生工程(P3)と押出工程(P4)との中間になるような位置に設置されている。
【0037】
このような構成の本変形例によれば、上記実施形態と同様の作用効果を奏するのに加えて、ホール素子30bの出力からカム位置が水洗工程(P5)と補水工程(P6)との間にあること、ホール素子30cの出力からカム位置が通水工程(P1)と逆洗工程(P2)との間にあること、ホール素子30dの出力からカム位置が再生工程(P3)と押出工程(P4)との間にあることを、制御回路50が認識することができる。
【0038】
よって、本変形例によれば、カム位置を失った軟水装置を再起動後、さらに短期間でカム位置を把握することができ、任意の工程から処理を再開する場合の時間を大幅に短縮することができる。
【0039】
以上、変形例も含めて本実施形態について詳細に説明したが、本発明の実施の形態は、上記実施形態やその変形例に限定されるものではなく、本発明の主旨を逸脱しない範囲内で種々の変形が可能である。例えば、検出孔の形状は、切り欠きに限らず、光学的に認識できる形状であれば良い。
【0040】
また、本実施形態では、検出孔を検出するセンサとして、フォトインタラプタを用いたが、これに限らず、光源と光センサを有する光学式センサであれば、適宜他のセンサを用いることができる。
【0041】
また、本実施形態では、磁石を検出する磁気センサとしてホール素子を用いたが、磁界の大きさを測定できる磁気センサであれば、適宜他の磁気センサを用いることができる。
【0042】
また、磁石の設置位置とホール素子の設置位置も適宜変更可能であることは言うまでもない。回転体に1つの磁石が設置され、この磁石を検出するためのホール素子が少なくとも1つ設置されていれば、従来と比較して短時間にカムの位置が検出可能となる。
【図面の簡単な説明】
【0043】
【図1】図1は、本実施形態に係る位置検出装置の構成を概略的に示す斜視図である。
【図2】図2は、本実施形態に係る切り欠きの形成位置を説明するための切り欠き板の一部展開図である
【図3】図3は、本実施形態の変形例に係る検出素子の配置状態を示す図である。
【符号の説明】
【0044】
1 位置検出装置
10 回転体
11 切り欠き板
12 切り欠き
15 永久磁石
20 フォトインタラプタ
30 ホール素子
40 制御回路
51,52 配線
60 カム
61 回転軸
70 基板
【特許請求の範囲】
【請求項1】
軟水装置に設置されるカム駆動式コントロールバルブのカムの回転位置を検出するための位置検出装置において、
前記カムの回転軸と一体になって回転するように同軸に設置された回転体であって、円周方向に所定の間隔で形成され、前記回転軸の回転に伴って回転移動する複数の検出孔と、前記回転軸の回転に伴って回転移動する磁石と、が設けられた回転体と、
前記検出孔を検出するための光学式センサと、
前記磁石を検出するための磁気センサと、
前記光学式センサ及び前記磁気センサの出力から前記カムの回転位置を検出する制御回路と、を備えることを特徴とする位置検出装置。
【請求項2】
前記磁気センサを複数備えることを特徴とする請求項1記載の位置検出装置。
【請求項3】
前記軟水装置は、少なくとも、通水工程、再生工程、押出工程及び水洗工程を備えており、
前記検出孔は、前記各工程に対応する位置に設けられ、
前記磁石は、前記各工程の中間に対応する位置に設けられ、
前記制御回路は、前記前記光学式センサの出力から前記各工程が行われるカム位置を検出し、前記磁気センサの出力から前記各工程の中間のカム位置を検出するように構成されていることを特徴とする請求項1又は2記載の位置検出装置。
【請求項4】
前記磁石及び前記磁気センサによって、前記押出工程と前記水洗工程との間のカム位置を検出するように、前記磁石及び前記磁気センサが配置されていることを特徴とする請求項3記載の位置検出装置。
【請求項1】
軟水装置に設置されるカム駆動式コントロールバルブのカムの回転位置を検出するための位置検出装置において、
前記カムの回転軸と一体になって回転するように同軸に設置された回転体であって、円周方向に所定の間隔で形成され、前記回転軸の回転に伴って回転移動する複数の検出孔と、前記回転軸の回転に伴って回転移動する磁石と、が設けられた回転体と、
前記検出孔を検出するための光学式センサと、
前記磁石を検出するための磁気センサと、
前記光学式センサ及び前記磁気センサの出力から前記カムの回転位置を検出する制御回路と、を備えることを特徴とする位置検出装置。
【請求項2】
前記磁気センサを複数備えることを特徴とする請求項1記載の位置検出装置。
【請求項3】
前記軟水装置は、少なくとも、通水工程、再生工程、押出工程及び水洗工程を備えており、
前記検出孔は、前記各工程に対応する位置に設けられ、
前記磁石は、前記各工程の中間に対応する位置に設けられ、
前記制御回路は、前記前記光学式センサの出力から前記各工程が行われるカム位置を検出し、前記磁気センサの出力から前記各工程の中間のカム位置を検出するように構成されていることを特徴とする請求項1又は2記載の位置検出装置。
【請求項4】
前記磁石及び前記磁気センサによって、前記押出工程と前記水洗工程との間のカム位置を検出するように、前記磁石及び前記磁気センサが配置されていることを特徴とする請求項3記載の位置検出装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2009−172461(P2009−172461A)
【公開日】平成21年8月6日(2009.8.6)
【国際特許分類】
【出願番号】特願2008−11003(P2008−11003)
【出願日】平成20年1月21日(2008.1.21)
【出願人】(000175272)三浦工業株式会社 (1,055)
【出願人】(504143522)株式会社三浦プロテック (488)
【Fターム(参考)】
【公開日】平成21年8月6日(2009.8.6)
【国際特許分類】
【出願日】平成20年1月21日(2008.1.21)
【出願人】(000175272)三浦工業株式会社 (1,055)
【出願人】(504143522)株式会社三浦プロテック (488)
【Fターム(参考)】
[ Back to top ]