
位置検出装置
【課題】磁石及び磁気センサの特性のバラツキや組立精度の影響を抑えながら、回路規模が小さく、低消費電流による駆動を実現する。
【解決手段】位置検出装置は、2個の磁気センサ11a,11bが互いに離間されて配置される少なくとも1つの磁気センサ対と、磁気センサ対に対して移動自在又は傾斜自在に配設される磁石10と、各磁気センサ11a,11bの出力電圧を電流に変換するV/I変換回路12と、V/I変換回路12が変換した各電流I1,I2を基に、差電流(I1−I2)を生成する減算回路13と、V/I変換回路12が変換した各電流I1,I2を基に、和電流(I1+I2)を生成する加算回路14と、差電流(I1−I2)を和電流(I1+I2)で除算する電流除算回路15と、電流除算回路15が除算して得た値を位置信号Voとして出力する出力回路16と、を備える。
【解決手段】位置検出装置は、2個の磁気センサ11a,11bが互いに離間されて配置される少なくとも1つの磁気センサ対と、磁気センサ対に対して移動自在又は傾斜自在に配設される磁石10と、各磁気センサ11a,11bの出力電圧を電流に変換するV/I変換回路12と、V/I変換回路12が変換した各電流I1,I2を基に、差電流(I1−I2)を生成する減算回路13と、V/I変換回路12が変換した各電流I1,I2を基に、和電流(I1+I2)を生成する加算回路14と、差電流(I1−I2)を和電流(I1+I2)で除算する電流除算回路15と、電流除算回路15が除算して得た値を位置信号Voとして出力する出力回路16と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体の移動又は傾斜を検出する位置検出装置に関し、さらにはこの位置検出装置を用いて、パーソナルコンピュータや携帯電話等の入力手段として使用される位置検出装置に関する。より詳細には、磁石の移動又は傾斜による周囲の磁界変化を検出することにより、座標検知を行う磁気検出方式の位置検出装置に関する。
【背景技術】
【0002】
座標検知を行う位置検出装置としては、各種の方式が存在する。
小型化、低コスト、低消費電流化などの要請がある場合には、各種方式のうち、磁石と磁気センサとを用いた磁気検出方式の位置検出装置を用いることが好適である。
ただし、磁石及び磁気センサは、温度による特性変化が大きく、環境温度に影響を受けやすい。また、磁石及び磁気センサを用いた位置検出装置の位置精度は、磁石及び磁気センサの特性のバラツキや組立精度の影響を受けやすい。
【0003】
このような影響を緩和する技術としては、例えば、特許文献1に記載の技術が存在する。特許文献1に記載の技術によれば、2つの磁気センサの差出力電圧を和出力電圧で除算して出力信号とすることで、環境温度による影響を抑え、磁石および磁気センサの特性のバラツキや組立精度による影響も抑えることが可能である。
また、他にもこのような影響を緩和する技術としては、例えば、特許文献2に記載の技術が存在する。特許文献2に記載の技術によれば、2つの磁気センサの出力値の和を一定にするように磁気センサへの入力電流を制御しつつ、2つの磁気センサの出力値の差を出力信号とすることで、環境温度による影響を抑えることが可能である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−348173号公報
【特許文献2】特許4049125号
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1の位置検出装置では、2つの磁気センサの差出力電圧を和出力電圧で除算する必要がある。しかし、電圧を除算する方法が難しいという課題があった。
また、電圧を除算する方法としては、一般的には、デジタル除算演算方法がある。しかし、この方法を用いるためには、磁気センサの出力信号をA/D変換し、デジタル除算演算した後、D/A変換する必要がある。そのため、電圧を除算することは可能になるが、A/D変換回路、D/A変換回路等が必要になるため、回路規模が大きくなるという課題が新たに発生する。
【0006】
また、特許文献2の位置検出装置では、磁気センサの出力信号が小さくなると、和信号を一定に制御するために磁気センサに大きな電流を流さければならない。これにより、特許文献2の位置検出装置には、消費電流が大きくなってしまうという課題があった。
本発明の課題は、磁石及び磁気センサの特性のバラツキや組立精度の影響を抑えながら、回路規模が小さく、低消費電流による駆動を実現することにある。
【課題を解決するための手段】
【0007】
前記課題を解決するために、本発明に係る請求項1に記載の位置検出装置は、2個の磁気センサが互いに離間されて配置される少なくとも1つの磁気センサ対と、前記磁気センサ対に対して移動自在又は傾斜自在に配設される磁石と、前記磁気センサ対の各磁気センサの差電流に基づいた値を、該各磁気センサの和電流で除算する演算回路と、前記演算回路が除算して得た値を出力する出力手段と、を備えることを特徴とする。
【0008】
また、本発明に係る請求項2に記載の位置検出装置は、請求項1に記載の位置検出装置において、前記演算回路が、前記磁気センサ対の各磁気センサの出力電圧を電流に変換する電圧電流変換回路と、前記電圧電流変換回路が変換した各電流を基に、前記差電流を生成する電流減算回路と、前記電圧電流変換回路が変換した各電流を基に、前記和電流を生成する電流加算回路と、前記電流減算回路が生成した差電流を前記電流加算回路が生成した和電流で除算する電流除算回路と、を備え、前記出力手段が、前記電流除算回路が除算して得た値を出力することを特徴とする。
【0009】
また、本発明に係る請求項3に記載の位置検出装置は、請求項1に記載の位置検出装置において、前記演算回路が、前記磁気センサ対の各磁気センサの出力電圧を電流に変換する電圧電流変換回路と、前記電圧電流変換回路が変換した各電流を基に生成した差電流に、前記電圧電流変換回路が変換した各電流を基に生成した和電流を加算した電流を生成する電流加減算回路と、前記電圧電流変換回路が変換した各電流を基に、前記和電流を生成する電流加算回路と、前記電流加減算回路が前記差電流に前記和電流を加算して生成した電流を、前記電流加算回路が生成した和電流で除算する電流除算回路と、を備え、前記出力手段が、前記電流除算回路が除算して得た値を出力することを特徴とする。
【0010】
また、本発明に係る請求項4に記載の位置検出装置は、請求項1に記載の位置検出装置において、前記演算回路が、前記磁気センサ対の各磁気センサの出力電圧を電流に変換する電圧電流変換回路と、前記電圧電流変換回路が変換した各電流を基に生成した差電流を任意の整数nによりn倍した差電流であるn倍差電流に、前記電圧電流変換回路が変換した各電流を基に生成した和電流を任意の整数mによりm倍した和電流であるm倍和電流を加算した電流を生成する電流加減算回路と、前記電圧電流変換回路が変換した各電流を基に和電流を生成し、生成した和電流を任意の整数mによりm倍した和電流であるm倍和電流を生成する電流加算回路と、前記電流加減算回路が前記n倍差電流に前記m倍和電流を加算して生成した電流を、前記電流加算回路が生成したm倍和電流で除算する電流除算回路と、を備え、前記出力手段が、前記電流除算回路が除算して得た値を出力することを特徴とする。
【0011】
また、本発明に係る請求項5に記載の位置検出装置は、請求項1に記載の位置検出装置において、前記演算回路が、前記磁気センサ対の各磁気センサの出力電圧を基に、差電圧を生成する電圧減算回路と、該磁気センサ対の各磁気センサの出力電圧を基に、和電圧を生成する電圧加算回路と、前記電圧減算回路及び電圧加算回路が生成した差電圧及び和電圧を差電流及び和電流にそれぞれ変換する電圧電流変換回路と、前記電圧電流変換回路が変換した差電流を前記電圧電流変換回路が変換した和電流で除算する電流除算回路と、を備え、前記出力手段が、前記電流除算回路が除算して得た値を出力することを特徴とする。
【0012】
また、本発明に係る請求項6に記載の位置検出装置は、請求項1〜5の何れか1項に記載の位置検出装置において、一の方向に2個の磁気センサが互いに離間されて配置される一の磁気センサ対と、前記一の方向に対して垂直な他の方向に2個の磁気センサが互いに離間されて配置される他の磁気センサ対と、を備え、前記一の磁気センサ対の2個の磁気センサの中間位置と、前記他の磁気センサ対の2個の磁気センサの中間位置とが一致しており、前記磁石が、前記一致する位置を通り前記一の方向及び前記他の方向それぞれに対して垂直な軸線上に配置されることを特徴とする。
【0013】
また、本発明に係る請求項7に記載の位置検出装置は、請求項1〜6の何れか1項に記載の位置検出装置において、前記電流除算回路が、前記除算により電流値を出力しており、前記出力手段が、前記電流除算回路が出力した除算して得た値である電流値を電圧値に変換して出力する電流電圧変換回路であることを特徴とする。
本発明において、出力手段が出力する値は、磁石又は位置検出装置の被検出対象の移動量又は傾斜度合いを示す位置信号となる。
【発明の効果】
【0014】
本発明によれば、磁気センサ対の各磁気センサの差電流をその各磁気センサの和電流で除算することで、磁石及び磁気センサの特性のバラツキや組立精度による影響を抑えることができ、位置検出装置を低消費電流により駆動できる。
また、本発明によれば、各磁気センサの差電流をその各磁気センサの和電流で除算しているので、その除算演算に回路規模が小さい電流除算回路を用いることができ、位置検出装置を小型化できる。
【図面の簡単な説明】
【0015】
【図1】第1の実施形態の位置検出装置を説明するための回路ブロックである。
【図2】検出部の概略の構成例を示す図である。
【図3】第1及び第2磁気センサに対する磁石のX軸方向の位置Xと、第1及び第2磁気センサの出力電圧V1,V2との関係を示す特性図である。
【図4】V/I変換回路の回路構成の一例を示す図である。
【図5】減算回路の回路構成の一例を示す図である。
【図6】加算回路の回路構成の一例を示す図である。
【図7】電流除算回路の回路構成の一例を示す図である。
【図8】電流除算回路及び出力回路の回路構成の一例を示す図である。
【図9】第4の実施形態の位置検出装置を説明するための回路ブロックである。
【図10】第5の実施形態の位置検出装置を説明するための回路ブロックである。
【図11】X軸及びY軸に対応する検出部の概略の構成例を示す図である。
【図12】第1及び第2磁気センサに対する磁石のX軸方向の位置Xと、第1及び第2磁気センサの出力電圧V1X,V2Xとの関係を示す特性図である。
【図13】第3及び第4磁気センサに対する磁石のY軸方向の位置Yと、第3及び第4磁気センサの出力電圧V1Y,V2Yとの関係を示す特性図である。
【発明を実施するための形態】
【0016】
(第1の実施形態)
(構成)
本実施形態は、本発明を適用した位置検出装置である。
位置検出装置は、磁石の移動又は傾斜による周囲の磁界変化を検出して、座標検知を行う磁気検出方式の位置検出装置である。
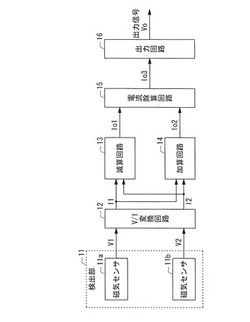
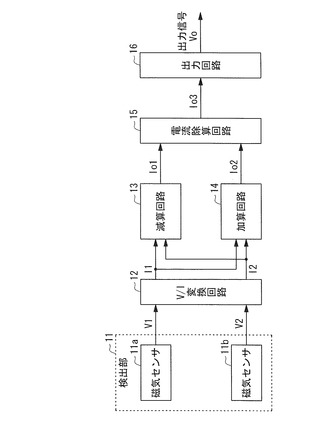
図1は、位置検出装置の概略構成を示す回路ブロックである。図1に示すように、位置検出装置は、検出部11、V/I変換回路12、減算回路13、加算回路14、電流除算回路15、及び出力回路16を有する。
【0017】
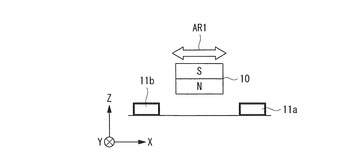
図2は、検出部11の概略の構成例を示す。図1にも示すように、検出部11は、第1及び第2磁気センサ11a,11bを有する。
第1及び第2磁気センサ11a,11bは、互いに離間されて配置された磁気センサ対を構成する。第1及び第2磁気センサ11a,11bは、例えば、ホール素子、半導体磁気抵抗素子、感磁性体磁気抵抗素子、又はGMR素子である。第1磁気センサ11aと第2磁気センサ11bとは、1軸上(X軸)に沿って配置されている。第1及び第2磁気センサ11a,11bには、所定の入力電圧を印加して電流を流す。
【0018】
検出部11では、第1磁気センサ11aと第2磁気センサ11bとの中間付近に、磁石10が配置されている。具体的には、検出部11では、第1磁気センサ11aと第2磁気センサ11bとのほぼ中間位置から、第1磁気センサ11aと第2磁気センサ11bとを結ぶ線に対して垂直方向(Z軸方向)のある位置に、磁石10が配置されている。つまり、検出部11では、磁石10を通る軸(Z軸)に沿うように磁気センサ11a,11bが配設されている。
【0019】
磁石10は、支持部材等により移動自在又は傾斜自在に配設されている。これにより、磁石10は、第1及び第2磁気センサ11a,11bに対して移動自在又は傾斜自在に配置されている。このような構成において、磁石10が移動又は傾斜すると、磁石10の磁界が変化する。この磁界の変化により、磁気センサ11a,11bの出力電圧が変化する。例えば、図2に示すように、X軸方向である矢印AR1の方向に移動すると、X軸方向の磁界が変化する。
【0020】
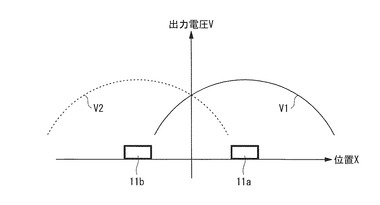
図3は、第1及び第2磁気センサ11a,11bに対する磁石10のX軸方向の位置Xと、第1及び第2磁気センサ11a,11bの出力電圧V1,V2との関係を示す。
図3に示すように、位置Xが第1及び第2磁気センサ11a,11bから遠いほど、第1及び第2磁気センサ11a,11bの出力電圧V1,V2は小さくなる。また、位置Xが第1及び第2磁気センサ11a,11bに近いほど、第1及び第2磁気センサ11a,11bの出力電圧V1,V2は大きくなる。
検出部11は、各磁気センサ11a,11bの出力電圧V1,V2をV/I変換回路12に出力する。
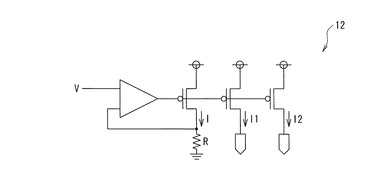
V/I変換回路12は、磁気センサ11a,11bの出力電圧V1,V2を電流I1,I2に変換する。V/I変換回路12は、電流I1,I2を減算回路13及び加算回路14に出力する。
【0021】
例えば、V/I変換回路12の回路構成例は、図4に示すようになる。
減算回路13は、電流I1,I2を基に下記出力電流(差電流)Io1を生成する。また、加算回路14は、電流I1,I2を基に下記出力電流(和電流)Io2を生成する。
Io1=I1−I2
Io2=I1+I2
減算回路13及び加算回路14は、出力電流Io1,Io2を電流除算回路15に出力する。
【0022】
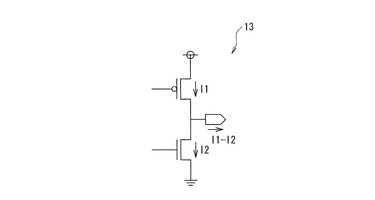
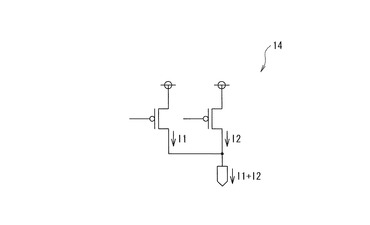
例えば、減算回路13の回路構成例は、図5に示すようになり、加算回路14の回路構成例は、図6に示すようになる。
電流除算回路15は、出力電流Io1,Io2を基に、下記出力電流Io3を生成する。
Io3=Io1/Io2
=(I1−I2)/(I1+I2)
ここで、電流除算回路15は、マイナス電流の演算ができない。そのため、電流除算回路15では、下記式(I1−I2>0)が成立する場合に除算演算が可能になる。
Io1=I1−I2>0
【0023】
電流除算回路15は、出力電流Io3を出力回路16に出力する。
出力回路16は、電流電圧変換回路である。出力回路16は、下記式のように、電流除算回路15の出力電流Io3に基準電流Iref及び任意のゲインGainを乗算して電圧変換し、位置信号Voを出力する。
Vo=(I1−I2)/(I1+I2)×Iref×Gain
【0024】
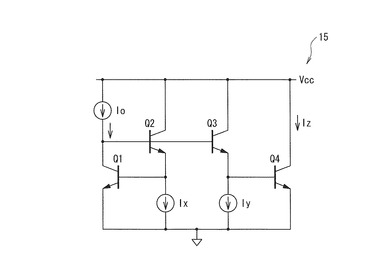
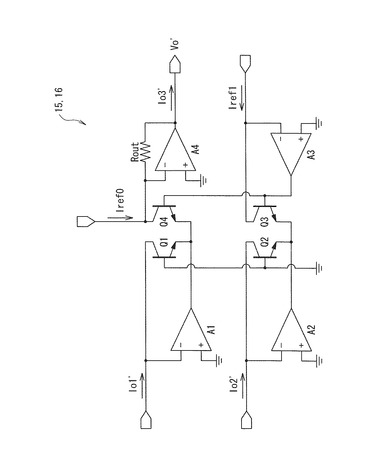
例えば、電流除算回路15の回路構成例は、図7に示すようになる。図7に示す回路構成は、トランスリニア原理を用いたものである。
この回路において、
VBE・Q1+VBE・Q2=VBE・Q3+VBE・Q4
とすると、
VBE∝XlogIc
より、
Io×Ix=Iy×Iz
となる。この式を変形すると、
Iz=Io×Ix/Iy
となる。そして、IxをIo1とし、IyをIo2とし、IzをIo3とし、Ioを基準電流Irefとすることで、
Io3=Io1/Io2×Iref
=(I1−I2)/(I1+I2)×Iref
となる。
このIo3に任意のゲインGainを乗算して電圧変換して、位置信号Voを得ることができる。
【0025】
(動作、作用及び効果)
位置検出装置は、磁石10が移動又は傾斜すると、検出部11の磁気センサ11a,11bがその移動又は傾斜に応じた出力電圧V1,V2をV/I変換回路12に出力する。
V/I変換回路12は、磁気センサ11a,11bの出力電圧V1,V2を電流I1,I2に変換して、減算回路13及び加算回路14に出力する。
減算回路13は、電流I1,I2を基に生成した出力電流Io1を電流除算回路15に出力する。また、加算回路14は、電流I1,I2を基に生成した出力電流Io2を電流除算回路15に出力する。
【0026】
電流除算回路15は、出力電流Io1,Io2を基に、除算演算して生成した出力電流Io3を出力回路16に出力する。
出力回路16は、電流除算回路15の出力電流Io3に基準電流Iref及び任意のゲインGainを乗算して電圧変換し、位置信号Voを出力する。
ここで、位置検出装置が、物体の移動又は傾斜を検出する位置検出装置に適用された場合、位置信号Voは、物体の位置、移動量又は傾斜度合いを示す情報となる。また、位置検出装置が、パーソナルコンピュータや携帯電話等の入力手段として使用される位置検出装置に適用された場合、位置信号Voは、入力手段の位置、移動量又は傾斜度合いを示す情報となる。
【0027】
このような位置検出装置では、磁石10及び磁気センサ11a,11bは、温度による特性変化が大きく、環境温度に影響を受けやすい。また、位置検出装置の位置精度は、磁石10及び磁気センサ11a,11bの特性のバラツキや組立精度の影響を受けやすい。
これに対して、第1の実施形態の位置検出装置は、磁気センサ11a,11bの出力電流I1,I2を基に生成した差電流(I1−I2)を、同出力電流I1,I2を基に生成した和電流(I1+I2)で除算演算して、位置信号Voを生成している。
このようにすることで、位置検出装置は、環境温度による影響を抑え、磁石及び磁気センサの特性のバラツキや組立精度による影響を抑えることができる。
【0028】
また、位置検出装置は、環境温度による影響や磁石及び磁気センサの特性のバラツキや組立精度の影響によって磁気センサの出力信号が小さくなる場合でも、除算演算をしない別の方法のように磁気センサへの入力電流を大きくすることもなく、位置信号Voを得ることができる。これにより、位置検出装置は、磁気センサの出力信号の大きさにかかわらず磁気センサへの入力電流を一定にして、位置信号Voを得ることができる。この結果、位置検出装置は、低消費電流による駆動が可能になる。
【0029】
また、位置検出装置は、電流除算回路15により除算演算している。ここで、電流除算回路15は、回路規模の小さい回路である。よって、電流除算回路15の回路規模が小さいため、位置検出装置は、小型化されたものとなる。
なお、この第1の実施形態では、V/I変換回路12は電圧電流変換回路に対応する。減算回路13は電流減算回路に対応する。加算回路14は電流加算回路に対応する。電流除算回路15は電流除算回路に対応する。出力回路16は出力手段に対応する。
【0030】
(第2の実施形態)
(構成)
第2の実施形態は、前記第1の実施形態と同様、位置検出装置である。
第2の実施形態の位置検出装置の構成は、前記図1に示した第1の実施形態の位置検出装置の構成と同一である。しかし、第2の実施形態では、減算回路13の出力電流、加算回路14の出力電流、及び電流除算回路15の出力電流の演算内容が第1の実施形態のものと異なる。
【0031】
以下の説明で、特に言及がない限りは、第2の実施形態の構成は、前記第1の実施形態の構成と同一である。
第2の実施形態では、減算回路13は、電流I1,I2を基に下記出力電流Io1’を生成する。また、加算回路14は、電流I1,I2を基に下記出力電流Io2’を生成する。
Io1’=(I1−I2)+(I1+I2)
Io2’=(I1+I2)
【0032】
減算回路13及び加算回路14は、出力電流Io1’,Io2’を電流除算回路15に出力する。
電流除算回路15は、出力電流Io1’,Io2’を基に、下記出力電流Io3’を生成する。
Io3’=Io1’/Io2’
=((I1−I2)+(I1+I2))/(I1+I2)
=1+(I1−I2)/(I1+I2)
ここで、電流除算回路15は、マイナス電流の演算ができない。そのため、電流除算回路15では、下記式(2×I1>0)が成立する場合に除算演算が可能になる。
Io1’=(I1−I2)+(I1+I2)
=2×I1>0
【0033】
電流除算回路15は、出力電流Io3’を出力回路16に出力する。
出力回路16は、下記式のように、電流除算回路15の出力電流Io3’に基準電流Irefを乗算し、その乗算値から基準電流Irefを減算し、その減算値に任意のゲインGainを乗算して電圧変換し、位置信号Vo’を出力する。
Vo’=(((((I1−I2)+(I1+I2))/(I1+I2))×Iref)−Iref)×Gain
=(I1−I2)/(I1+I2)×Iref×Gain
【0034】
例えば、電流除算回路15及び出力回路16の回路構成例は、図8に示すようになる。図8に示すように、回路には、電流Io1’(=(I1−I2)+(I1+I2)),Io2’(=(I1+I2))、基準電流Iref0,Iref1がそれぞれ入力されている。そして、電流Io1’は、NPNトランジスタQ1のコレクタ電流IC1となり、電流Io2’は、NPNトランジスタQ2のコレクタ電流IC2となり、基準電流Iref1は、NPNトランジスタQ3のコレクタ電流IC3となり、基準電流Iref0は、NPNトランジスタQ4のコレクタ電流IC4となる。
【0035】
このような回路において、出力電圧(位置信号)Vo’は、
Vo’=IC4・Rout
である。一方、
Ic4=α・IE4
≒α・IS・eq・VBE4/(K・T)
となる。ここで、Isは順方向活性領域のトランジスタの伝達特性を表す定数、kはボルツマン定数、Tは絶対温度、qは電子電荷である。
【0036】
さらに、この式を変形すると、
VBE4=K・T/q・ln(IC4/(α・IS))
となる。
また、NPNトランジスタQ1,Q2,Q3,Q4のベース電圧の関係は、
VBE4=VBE1−VBE2+VBE3
である。そして、それらベース−エミッタ間電圧は、コレクタ電流ICによって決まるため、
VBE4=K・T/q・(ln(IC1/(α・IS))−ln(IC2/(α・IS))+ln(IC3/(α・IS)))
=K・T/q・(ln(IC1・IC3)/(α・IS・IC2))
となる。
【0037】
よって、NPNトランジスタQ1,Q2,Q3,Q4のマッチングがとれていると、出力電圧は、
Vo’=IC4・Rout=(IC1・IC3/IC2)・Rout
となる。
そして、電流割算回路ではマイナス電流の割算ができないことから、出力電圧(位置信号)Vo’を以下のように導出する。さらに、このとき、Iref1=Iref0とすると、
Vo’=(Io1’/Io2’×Iref1−Iref0)×Rout
=((Io1/Io2×Iref1)+Iref1−Iref0)×Rout
=(Io1/Io2)×Iref1×Rout
=(I1−I2)/(I1+I2)×Iref1×Rout
となる。そして、Iref1をIrefとし、RoutをGainとすることで、前述の式と同じ
Vo’=(I1−I2)/(I1+I2)×Iref×Gain
を導出できる。
【0038】
(動作、作用及び効果)
位置検出装置は、磁石10が移動又は傾斜すると、検出部11の磁気センサ11a,11bがその移動又は傾斜に応じた出力電圧V1,V2をV/I変換回路12に出力する。
V/I変換回路12は、磁気センサ11a,11bの出力電圧V1,V2を電流I1,I2に変換して、減算回路13及び加算回路14に出力する。
減算回路13は、電流I1,I2を基に生成した出力電流Io1’を電流除算回路15に出力する。また、加算回路14は、電流I1,I2を基に生成した出力電流Io2’を電流除算回路15に出力する。
【0039】
電流除算回路15は、出力電流Io1’,Io2’を基に除算演算して生成した出力電流Io3’を出力回路16に出力する。
出力回路16は、電流除算回路15の出力電流Io3’を、基準電流Iref及び任意のゲインGainを用いて電圧変換し、位置信号Vo’を出力する。
ここで、第2の実施形態では、前記第1の実施形態との差異として、減算回路13の出力電流Io1’の演算内容を変更している。この演算内容の変更により、電流除算回路15では、下記式が成立する場合に除算演算が可能となっている。
2×I1>0
【0040】
この式によれば、第1磁気センサ11aの出力電流I1が正である全ての場合に、電流除算回路15による除算演算が可能になる。
この結果、第2の実施形態の位置検出装置は、前記第1の実施形態と比較して、磁石10の磁界の変化の検出可能範囲が広がり、磁石10の移動距離が長い場合や磁石10の姿勢変化が大きい場合にも対応できるようになる。
【0041】
また、第2の実施形態の位置検出装置が出力する位置信号Vo’は、前記第1の実施形態の位置検出装置が出力する位置信号Voと同じ値となる。そして、第2の実施形態でも、前記第1の実施形態と同様な効果を得ることができる。
すなわち、第2の実施形態の位置検出装置は、磁気センサ11a,11bの出力電流I1,I2を基に生成した差電流(I1−I2)を、同出力電流I1,I2を基に生成した和電流(I1+I2)で除算演算して、位置信号Vo’を生成している。
このようにすることで、位置検出装置は、環境温度による影響を抑え、磁石及び磁気センサの特性のバラツキや組立精度による影響を抑えることができる。
【0042】
また、位置検出装置は、環境温度による影響や磁石及び磁気センサの特性のバラツキや組立精度の影響によって磁気センサの出力信号が小さくなる場合でも、除算演算をしない別の方法のように磁気センサへの入力電流を大きくすることもなく、位置信号Vo’を得ることができる。これにより、位置検出装置は、磁気センサの出力信号の大きさにかかわらず磁気センサへの入力電流を一定にして、位置信号Vo’を得ることができる。この結果、位置検出装置は、低消費電流による駆動が可能になる。
また、位置検出装置は、電流除算回路15により除算演算している。ここで、電流除算回路15は、回路規模の小さい回路である。よって、電流除算回路15の回路規模が小さいため、位置検出装置は、小型化されたものとなる。
なお、この第2の実施形態では、減算回路13は電流加減算回路に対応する。
【0043】
(第3の実施形態)
(構成)
第3の実施形態は、前記第1及び第2の実施形態と同様、位置検出装置である。
第3の実施形態の位置検出装置の構成は、前記図1に示した第1及び第2の実施形態の位置検出装置の構成と同一である。しかし、第3の実施形態では、減算回路13の出力電流、加算回路14の出力電流、及び電流除算回路15の出力電流の演算内容が第1及び第2の実施形態のものと異なる。
以下の説明で、特に言及がない限りは、第3の実施形態の構成は、前記第1及び第2の実施形態の構成と同一である。
【0044】
第3の実施形態では、減算回路13は、電流I1,I2を基に下記出力電流Io1’’を生成する。また、加算回路14は、電流I1,I2を基に下記出力電流Io2’’を生成する。
Io1’’=n×(I1−I2)+m×(I1+I2)
Io2’’=m×(I1+I2)
ここで、n、mは任意の定数である。
【0045】
減算回路13及び加算回路14は、出力電流Io1’’,Io2’’を電流除算回路15に出力する。
電流除算回路15は、出力電流Io1’’,Io2’’を基に、下記出力電流Io3’’を生成する。
Io3’’=Io1’’/Io2’’
=(n×(I1−I2)+m×(I1+I2))/(m×(I1+I2))
=1+n×(I1−I2)/(m×(I1+I2))
【0046】
ここで、電流除算回路15は、マイナス電流の演算ができない。そのため、電流除算回路15では、下記式(n×(I1−I2)+m×(I1+I2)>0)が成立する場合に除算演算が可能になる。
Io1’’=n×(I1−I2)+m×(I1+I2)>0
電流除算回路15は、出力電流Io3’’を出力回路16に出力する。
出力回路16は、下記式のように、電流除算回路15の出力電流Io3’’に基準電流Irefを乗算し、その乗算値から基準電流Irefを減算し、その減算値に任意のゲインGainを乗算して電圧変換し、位置信号Vo’’を出力する。
Vo’’=((((n×(I1−I2)+m×(I1+I2))/(m×(I1+I2)))×Iref)−Iref)×Gain
=(n/m)×(I1−I2)/(I1+I2)×Iref×Gain
【0047】
(動作、作用及び効果)
位置検出装置は、磁石10が移動又は傾斜すると、検出部11の磁気センサ11a,11bがその移動又は傾斜に応じた出力電圧V1,V2をV/I変換回路12に出力する。
V/I変換回路12は、磁気センサ11a,11bの出力電圧V1,V2を電流I1,I2に変換して、減算回路13及び加算回路14に出力する。
減算回路13は、電流I1,I2を基に生成した出力電流(差電流)Io1’’を電流除算回路15に出力する。また、加算回路14は、電流I1,I2を基に生成した出力電流(和電流)Io2’’を電流除算回路15に出力する。
【0048】
電流除算回路15は、出力電流Io1’’,Io2’’を基に除算演算して生成した出力電流Io3’’を出力回路16に出力する。
出力回路16は、電流除算回路15の出力電流Io3’’を、基準電流Iref及び任意のゲインGainを用いて電圧変換し、位置信号Vo’’を出力する。
ここで、第3の実施形態では、前記第1及び第2の実施形態との差異として、減算回路13の出力電流Io1’’の演算内容を変更している。この演算内容の変更により、電流除算回路15では、下記式が成立する場合に除算演算が可能となっている。
n×(I1−I2)+m×(I1+I2)>0
【0049】
この式によれば、適切な定数n,mを選択することにより、前記第1及び第2の実施形態と比較して、磁石10の磁界の変化の検出可能範囲が広がり、磁石10の移動距離が長い場合や磁石10の姿勢変化が大きい場合にも対応できるようになる。
例えば、n=1、m=2とした場合、
1×(I1−I2)+2×(I1+I2)
=3×I1+I2>0
となる。この場合、
I1>−1/3+I2
が除算演算可能な範囲、すなわち、磁石10の磁界の変化の検出可能範囲となる。よって、第2の実施形態における除算可能な範囲が(2×I1>0)となるから、第3の実施形態における磁界の変化の検出可能範囲は、第2の実施形態における磁界の変化の検出可能範囲よりも広くなる。
【0050】
また、第3の実施形態の位置検出装置が出力する位置信号Vo’’は、前記第1の実施形態の位置検出装置が出力する位置信号Vo,Vo’に対してn/m倍の大きさになるだけである。そして、第3の実施形態でも、前記第1及び第2の実施形態と同様な効果を得ることができる。
すなわち、第3の実施形態の位置検出装置は、磁気センサ11a,11bの出力電流I1,I2を基に生成した差電流(I1−I2)(又は(n×(I1−I2)))を、同出力電流I1,I2を基に生成した和電流(I1+I2)(又は(m×(I1+I2)))で除算演算して、位置信号Vo’’を生成している。
このようにすることで、位置検出装置は、環境温度による影響を抑え、磁石及び磁気センサの特性のバラツキや組立精度による影響を抑えることができる。
【0051】
また、位置検出装置は、環境温度による影響や磁石及び磁気センサの特性のバラツキや組立精度の影響によって磁気センサの出力信号が小さくなる場合でも、除算演算をしない別の方法のように磁気センサへの入力電流を大きくすることもなく、位置信号Vo’’を得ることができる。すなわち、位置検出装置は、磁気センサの出力信号の大きさにかかわらず磁気センサへの入力電流を一定にして、位置信号Vo’’を得ることができる。この結果、位置検出装置は、低消費電流による駆動が可能になる。
また、位置検出装置は、電流除算回路15により除算演算している。ここで、電流除算回路15は、回路規模の小さい回路である。よって、電流除算回路15の回路規模が小さいため、位置検出装置は、小型化されたものとなる。
なお、この第3の実施形態では、減算回路13は電流加減算回路に対応する。
【0052】
(第4の実施形態)
(構成)
第4の実施形態は、前記第1〜第3の実施形態と同様、位置検出装置である。
第4の実施形態では、V/I変換回路による電圧を電流に変換するタイミングが前記第1〜第3の実施形態のものと異なっている。すなわち、第4の実施形態では、V/I変換部に入力する信号が前記第1〜第3の実施形態のものと異なる。
図9は、第4の実施形態の位置検出装置の概略構成を示す回路ブロックである。
図9に示すように、位置検出装置は、検出部11、減算回路21、加算回路22、V/I変換回路23、電流除算回路15、及び出力回路16を有する。
【0053】
以下の説明で、特に言及がない限りは、第4の実施形態の構成は、前記第1の実施形態の構成(図1に示す構成)と同一である。
検出部11は、各磁気センサ11a,11bの出力電圧V1,V2を減算回路21及び加算回路22に出力する。
減算回路21は、電圧減算回路である。減算回路21は、出力電圧V1,V2を基に下記出力電圧(差電圧)Vo1を生成する。また、加算回路22は、電圧加算回路である。加算回路22は、出力電圧V1,V2を基に下記出力電圧(和電圧)Vo2を生成する。
Vo1=V1−I2
Vo2=V1+I2
【0054】
減算回路21及び加算回路22は、出力電圧Vo1,Vo2をV/I変換回路23に出力する。
V/I変換回路23は、電圧電流変換回路である。V/I変換回路23は、出力電圧Vo1,Vo2を下記出力電流(差電流及び和電流)Io1,Io2にそれぞれ変換する。
Io1=I1−I2
Io2=I1+I2
V/I変換回路23は、出力電流Io1,Io2を電流除算回路15に出力する。
そして、前記第1の実施形態と同様に、電流除算回路15は、出力電流Io1,Io2を基に出力電流Io3を生成し、生成した出力電流Io3を出力回路16に出力する。出力回路16は、電流除算回路15の出力電流Io3に基準電流Iref及び任意のゲインGainを乗算して電圧変換し、位置信号Voを出力する。
【0055】
(動作、作用及び効果)
位置検出装置は、磁石10が移動又は傾斜すると、検出部11の磁気センサ11a,11bがその移動又は傾斜に応じた出力電圧V1,V2を減算回路21及び加算回路22に出力する。
減算回路21は、出力電圧V1,V2を基に生成した差電圧Vo1をV/I変換回路23に出力する。また、加算回路22は、出力電圧V1,V2を基に生成した和電圧Vo2をV/I変換回路23に出力する。
V/I変換回路23は、減算回路21及び加算回路22の出力電圧Vo1,Vo2を出力電流(差電流及び和電流)Io1,Io2に変換して、電流除算回路15に出力する。
【0056】
電流除算回路15は、出力電流Io1,Io2を基に、除算演算して生成した出力電流Io3を出力回路16に出力する。
出力回路16は、電流除算回路15の出力電流Io3に基準電流Iref及び任意のゲインGainを乗算して電圧変換し、位置信号Voを出力する。
ここで、第4の実施形態では、減算回路21と加算回路22を電圧演算回路とし、V/I変換回路23が、減算回路21と加算回路22とが出力する差電圧Vo1及び和電圧Vo2を差電流及び和電流Io1,Io2に変換して、電流除算回路15に出力している。
【0057】
これにより、第4の実施形態の位置検出装置でも、電流除算回路15が差電流(I1−I2)を和電流(I1+I2)で除算演算して、位置信号Voを生成している。よって、第4の実施形態でも、前記第1〜第3の実施形態と同様な効果を得ることができる。
すなわち、位置検出装置は、環境温度による影響を抑え、磁石及び磁気センサの特性のバラツキや組立精度による影響を抑えることができる。
【0058】
また、位置検出装置は、環境温度による影響や磁石及び磁気センサの特性のバラツキや組立精度の影響によって磁気センサの出力信号が小さくなる場合でも、除算演算をしない別の方法のように磁気センサへの入力電流を大きくすることもなく、位置信号Voを得ることができる。すなわち、位置検出装置は、磁気センサの出力信号の大きさにかかわらず、位置信号Voを得ることができる。この結果、位置検出装置は、低消費電流による駆動が可能になる。
また、位置検出装置は、電流除算回路15により除算演算している。ここで、電流除算回路15は、回路規模の小さい回路である。よって、電流除算回路15の回路規模が小さいため、位置検出装置は、小型化されたものとなる。
【0059】
(第5の実施形態)
(構成)
第5の実施形態は、前記第1〜第4の実施形態と同様、位置検出装置である。
第5の実施形態では、X軸及びY軸(2軸)に対応して検出部を有する。すなわち、第5の実施形態では、4個(2対)の磁気センサを有しており、その点が前記第1〜第4の実施形態のものと異なる。
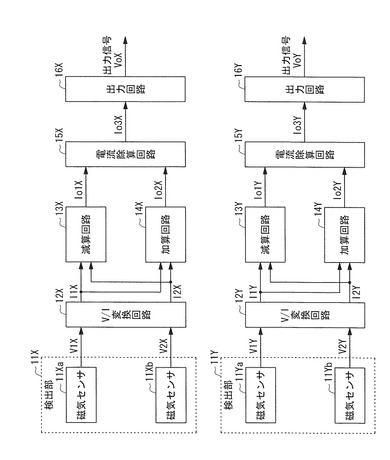
図10は、第5の実施形態の位置検出装置の概略構成を示す回路ブロックである。
図10に示すように、位置検出装置は、X軸及びY軸に対応する検出部11X,11Yを有し、そのX軸及びY軸用検出部11X,11Yに対応して、X軸及びY軸用V/I変換回路12X,12Y、X軸及びY軸用減算回路13X,13Y、X軸及びY軸用加算回路14X,14Y、X軸及びY軸用電流除算回路15X,15Y、X軸及びY軸用及び出力回路16X,16Yを有する。
【0060】
図11は、X軸及びY軸用検出部11X,11Yの概略の構成例を示す。図10にも示すように、X軸の検出部11Xは、磁気センサ(以下、第1及び第2磁気センサという。)11Xa,11Xbを有する。また、Y軸の検出部11Yは、磁気センサ(以下、第3及び第4磁気センサという。)11Ya,11Ybを有する。
第1〜第4磁気センサ11Xa,11Xb,11Ya,11Ybは、前記第1〜第4の実施形態と同様に、例えば、ホール素子、半導体磁気抵抗素子、感磁性体磁気抵抗素子、又はGMR素子である。
【0061】
第1磁気センサ11Xaと第2磁気センサ11Xbとは、X軸に沿って互いに離間されて配置されている。また、第3磁気センサ11Yaと第4磁気センサ11Ybとは、X軸に対して垂直なY軸に沿って互いに離間されて配置されている。そして、第1磁気センサ11Xaと第2磁気センサ11Xbとの中間付近で、かつ第3磁気センサ11Yaと第4磁気センサ11Ybとの中間付近に、磁石10が配置されている。具体的には、第1磁気センサ11Xaと第2磁気センサ11Xbの中間位置と、第3磁気センサ11Yaと第4磁気センサ11Ybの中間位置とが一致しており、磁石10は、その一致する位置を通りX軸及びY軸それぞれに対して垂直な軸線上に配置されている。
【0062】
このような構成において、磁石10が移動又は傾斜すると、磁石10の磁界が変化する。この磁界の変化により、磁気センサ11Xa,11Xb,11Ya,11Ybの出力電圧が変化する。例えば、図11に示すように、X軸方向である矢印AR1の方向に移動すると、X軸方向の磁界が変化し、第1及び第2磁気センサ11Xa,11Xbの出力電圧が変化する。また、Y軸方向である矢印AR2の方向に移動すると、Y軸方向の磁界が変化し、第3及び第4磁気センサ11Ya,11Ybの出力電圧が変化する。
【0063】
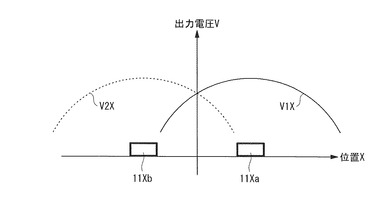
図12は、第1及び第2磁気センサ11Xa,11Xbに対する磁石10のX軸方向の位置Xと、第1及び第2磁気センサ11Xa,11Xbの出力電圧V1X,V2Xとの関係を示す。
図12に示すように、位置Xが第1及び第2磁気センサ11Xa,11Xbから遠いほど、第1及び第2磁気センサ11Xa,11Xbの出力電圧V1X,V2Xは小さくなる。また、位置Xが第1及び第2磁気センサ11Xa,11Xbに近いほど、第1及び第2磁気センサ11Xa,11Xbの出力電圧V1X,V2Xは大きくなる。
【0064】
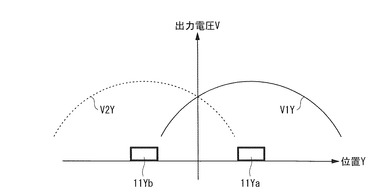
図13は、第3及び第4磁気センサ11Ya,11Ybに対する磁石10のY軸方向の位置Yと、第3及び第4磁気センサ11Ya,11Ybの出力電圧V1Y,V2Yとの関係を示す。
図13に示すように、位置Yが第3及び第4磁気センサ11Ya,11Ybから遠いほど、第3及び第4磁気センサ11Ya,11Ybの出力電圧V1Y,V2Yは小さくなる。また、位置Yが第3及び第4磁気センサ11Ya,11Ybに近いほど、第3及び第4磁気センサ11Ya,11Ybの出力電圧V1Y,V2Yは大きくなる。
【0065】
X軸用検出部11Xは、第1及び第2磁気センサ11Xa,11Xbの出力電圧V1X,V2XをX軸用V/I変換回路12Xに出力する。また、Y軸用検出部11Yは、第3及び第4磁気センサ11Ya,11Ybの出力電圧V1Y,V2YをY軸用V/I変換回路12Yに出力する。
X軸用V/I変換回路12Xは、第1及び第2磁気センサ11Xa,11Xbの出力電圧V1X,V2Xを電流I1X,I2Xに変換する。X軸用V/I変換回路12Xは、電流I1X,I2XをX軸用減算回路13X及びX軸用加算回路14Xに出力する。
【0066】
X軸用減算回路13Xは、電流I1X,I2Xを基に下記出力電流(差電流)Io1Xを生成する。また、X軸用加算回路14Xは、電流I1X,I2Xを基に下記出力電流(和電流)Io2Xを生成する。
Io1X=I1X−I2X
Io2X=I1X+I2X
X軸用減算回路13X及びX軸用加算回路14Xは、出力電流Io1X,Io2XをX軸用電流除算回路15Xに出力する。
X軸用電流除算回路15Xは、出力電流Io1X,Io2Xを基に、下記出力電流Io3Xを生成する。
Io3X=Io1X/Io2X
=(I1X−I2X)/(I1X+I2X)
【0067】
ここで、X軸用電流除算回路15Xは、マイナス電流の演算ができない。そのため、X軸用電流除算回路15Xでは、下記式(I1X−I2X>0)が成立する場合に除算演算が可能になる。
Io1X=I1X−I2X>0
X軸用電流除算回路15Xは、出力電流Io3XをX軸用出力回路16Xに出力する。
X軸用出力回路16Xは、下記式のように、X軸用電流除算回路15Xの出力電流Io3Xに基準電流Iref及び任意のゲインGainを乗算して電圧変換し、位置信号VoXを出力する。
VoX=(I1X−I2X)/(I1X+I2X)×Iref×Gain
【0068】
同様に、Y軸用V/I変換回路12Yは、第3及び第4磁気センサ11Ya,11Ybの出力電圧V1Y,V2Yを電流I1Y,I2Yに変換する。V/I変換回路12Yは、電流I1Y,I2YをY軸用減算回路13Y及びY軸用加算回路14Yに出力する。
Y軸用減算回路13Yは、電流I1Y,I2Yを基に下記出力電流(差電流)Io1Yを生成する。また、Y軸用加算回路14Yは、電流I1Y,I2Yを基に下記出力電流(和電流)Io2Yを生成する。
Io1Y=I1Y−I2Y
Io2Y=I1Y+I2Y
【0069】
Y軸用減算回路13Y及びY軸用加算回路14Yは、出力電流Io1Y,Io2YをY軸用電流除算回路15Yに出力する。
Y軸用電流除算回路15Yは、出力電流Io1Y,Io2Yを基に、下記出力電流Io3Yを生成する。
Io3Y=Io1Y/Io2Y
=(I1Y−I2Y)/(I1Y+I2Y)
【0070】
ここで、Y軸用電流除算回路15Yは、マイナス電流の演算ができない。そのため、Y軸用電流除算回路15Yでは、下記式(I1Y−I2Y>0)が成立する場合に除算演算が可能になる。
Io1Y=I1Y−I2Y>0
Y軸用電流除算回路15Yは、出力電流Io3YをY軸用出力回路16Yに出力する。
Y軸用出力回路16Yは、下記式のように、Y軸用電流除算回路15Yの出力電流Io3Yに基準電流Iref及び任意のゲインGainを乗算して電圧変換し、位置信号VoYを出力する。
VoY=(I1Y−I2Y)/(I1Y+I2Y)×Iref×Gain
【0071】
(動作、作用及び効果)
第5の実施形態の位置検出装置は、前記第1の実施形態の位置検出装置とはX軸(1軸)だけでなくY軸にも(2軸に)検出部を備える点で異なる。そして、第5の実施形態の位置検出装置では、X軸及びY軸に対応する位置信号VoX,VoYを、前記第1の実施形態の位置検出装置が位置信号Voを得る処理と同様な処理により得ている。これにより、第5の実施形態でも、前記第1の実施形態と同様な効果を得ることができる。
【0072】
すなわち、第5の実施形態の位置検出装置は、第1及び第2磁気センサ11Xa,11Xbの出力電流I1X,I2Xを基に生成した差電流(I1X−I2X)を、同出力電流I1X,I2Xを基に生成した和電流(I1X+I2X)で除算演算して、位置信号VoXを生成している。さらに、第5の実施形態の位置検出装置は、同様にして、第3及び第4磁気センサ11Ya,11Ybの出力電流I1Y,I2Yを基に生成した差電流(I1Y−I2Y)を、同出力電流I1Y,I2Yを基に生成した和電流(I1Y+I2Y)で除算演算して、位置信号VoYを生成している。
このようにすることで、位置検出装置は、環境温度による影響を抑え、磁石及び磁気センサの特性のバラツキや組立精度による影響を抑えることができる。
【0073】
また、位置検出装置は、環境温度による影響や磁石及び磁気センサの特性のバラツキや組立精度の影響によって磁気センサの出力信号が小さくなる場合でも、除算演算をしない別の方法のように磁気センサへの入力電流を大きくすることもなく、位置信号VoX,VoYを得ることができる。すなわち、位置検出装置は、磁気センサの出力信号の大きさにかかわらず磁気センサへの入力電流を一定にして、位置信号VoX,VoYを得ることができる。この結果、位置検出装置は、低消費電流による駆動が可能になる。
【0074】
また、第5の実施形態の位置検出装置は、X軸及びY軸用電流除算回路15X,15Yにより除算演算している。ここで、X軸及びY軸用電流除算回路15X,15Yは、回路規模の小さい回路である。よって、X軸及びY軸用電流除算回路15X,15Yの回路規模が小さいため、位置検出装置は、小型化されたものとなる。
なお、この第5の実施形態では、X軸及びY軸用V/I変換回路12X,12Yは電圧電流変換回路に対応する。X軸及びY軸用減算回路13X,13Yは電流減算回路に対応する。X軸及びY軸用加算回路14X,14Yは電流加算回路に対応する。X軸及びY軸用電流除算回路15X,15Yは電流除算回路に対応する。X軸及びY軸用出力回路16X,16Yは出力手段に対応する。
【0075】
(実施形態の変形例)
(1)第5の実施形態のように4個(2対)の磁気センサを用いて、前記第2〜第4の実施形態のような演算内容により、位置信号を得ることもできる。
(2)第2及び第3の実施形態では、減算回路13が差電流(I1−I2)又は差電流(n×(I1−I2))に和電流(I1+I2)又は和電流(m×(I1+I2))を加算した電流Io1’又は電流Io1’’を生成している。これに対して、加算回路14が生成した和電流(I1+I2)又は和電流(m×(I1+I2))を減算回路13に出力して、減算回路13が加算回路14から得た和電流(I1+I2)又は和電流(m×(I1+I2))を用いて、電流Io1’又は電流Io1’’を生成することもできる。
(3)本実施形態では、2個(1対)の磁気センサ又は4個(2対)の磁気センサにより位置検出装置(検出部)を構成している。これに対して、6個以上(3対以上)の磁気センサにより位置検出装置(検出部)を構成することもできる。
【符号の説明】
【0076】
10 磁石、11 検出部、11a,11b 磁気センサ、12,23 V/I変換回路(演算回路、電圧電流変換回路)、13 減算回路(演算回路、電流減算回路)、14 加算回路(演算回路、電流加算回路)、15 電流除算回路(演算回路、電流除算回路)、16 出力回路(出力手段)、21 減算回路(演算回路、電圧減算回路)、22 加算回路(演算回路、電圧加算回路)
【技術分野】
【0001】
本発明は、物体の移動又は傾斜を検出する位置検出装置に関し、さらにはこの位置検出装置を用いて、パーソナルコンピュータや携帯電話等の入力手段として使用される位置検出装置に関する。より詳細には、磁石の移動又は傾斜による周囲の磁界変化を検出することにより、座標検知を行う磁気検出方式の位置検出装置に関する。
【背景技術】
【0002】
座標検知を行う位置検出装置としては、各種の方式が存在する。
小型化、低コスト、低消費電流化などの要請がある場合には、各種方式のうち、磁石と磁気センサとを用いた磁気検出方式の位置検出装置を用いることが好適である。
ただし、磁石及び磁気センサは、温度による特性変化が大きく、環境温度に影響を受けやすい。また、磁石及び磁気センサを用いた位置検出装置の位置精度は、磁石及び磁気センサの特性のバラツキや組立精度の影響を受けやすい。
【0003】
このような影響を緩和する技術としては、例えば、特許文献1に記載の技術が存在する。特許文献1に記載の技術によれば、2つの磁気センサの差出力電圧を和出力電圧で除算して出力信号とすることで、環境温度による影響を抑え、磁石および磁気センサの特性のバラツキや組立精度による影響も抑えることが可能である。
また、他にもこのような影響を緩和する技術としては、例えば、特許文献2に記載の技術が存在する。特許文献2に記載の技術によれば、2つの磁気センサの出力値の和を一定にするように磁気センサへの入力電流を制御しつつ、2つの磁気センサの出力値の差を出力信号とすることで、環境温度による影響を抑えることが可能である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−348173号公報
【特許文献2】特許4049125号
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1の位置検出装置では、2つの磁気センサの差出力電圧を和出力電圧で除算する必要がある。しかし、電圧を除算する方法が難しいという課題があった。
また、電圧を除算する方法としては、一般的には、デジタル除算演算方法がある。しかし、この方法を用いるためには、磁気センサの出力信号をA/D変換し、デジタル除算演算した後、D/A変換する必要がある。そのため、電圧を除算することは可能になるが、A/D変換回路、D/A変換回路等が必要になるため、回路規模が大きくなるという課題が新たに発生する。
【0006】
また、特許文献2の位置検出装置では、磁気センサの出力信号が小さくなると、和信号を一定に制御するために磁気センサに大きな電流を流さければならない。これにより、特許文献2の位置検出装置には、消費電流が大きくなってしまうという課題があった。
本発明の課題は、磁石及び磁気センサの特性のバラツキや組立精度の影響を抑えながら、回路規模が小さく、低消費電流による駆動を実現することにある。
【課題を解決するための手段】
【0007】
前記課題を解決するために、本発明に係る請求項1に記載の位置検出装置は、2個の磁気センサが互いに離間されて配置される少なくとも1つの磁気センサ対と、前記磁気センサ対に対して移動自在又は傾斜自在に配設される磁石と、前記磁気センサ対の各磁気センサの差電流に基づいた値を、該各磁気センサの和電流で除算する演算回路と、前記演算回路が除算して得た値を出力する出力手段と、を備えることを特徴とする。
【0008】
また、本発明に係る請求項2に記載の位置検出装置は、請求項1に記載の位置検出装置において、前記演算回路が、前記磁気センサ対の各磁気センサの出力電圧を電流に変換する電圧電流変換回路と、前記電圧電流変換回路が変換した各電流を基に、前記差電流を生成する電流減算回路と、前記電圧電流変換回路が変換した各電流を基に、前記和電流を生成する電流加算回路と、前記電流減算回路が生成した差電流を前記電流加算回路が生成した和電流で除算する電流除算回路と、を備え、前記出力手段が、前記電流除算回路が除算して得た値を出力することを特徴とする。
【0009】
また、本発明に係る請求項3に記載の位置検出装置は、請求項1に記載の位置検出装置において、前記演算回路が、前記磁気センサ対の各磁気センサの出力電圧を電流に変換する電圧電流変換回路と、前記電圧電流変換回路が変換した各電流を基に生成した差電流に、前記電圧電流変換回路が変換した各電流を基に生成した和電流を加算した電流を生成する電流加減算回路と、前記電圧電流変換回路が変換した各電流を基に、前記和電流を生成する電流加算回路と、前記電流加減算回路が前記差電流に前記和電流を加算して生成した電流を、前記電流加算回路が生成した和電流で除算する電流除算回路と、を備え、前記出力手段が、前記電流除算回路が除算して得た値を出力することを特徴とする。
【0010】
また、本発明に係る請求項4に記載の位置検出装置は、請求項1に記載の位置検出装置において、前記演算回路が、前記磁気センサ対の各磁気センサの出力電圧を電流に変換する電圧電流変換回路と、前記電圧電流変換回路が変換した各電流を基に生成した差電流を任意の整数nによりn倍した差電流であるn倍差電流に、前記電圧電流変換回路が変換した各電流を基に生成した和電流を任意の整数mによりm倍した和電流であるm倍和電流を加算した電流を生成する電流加減算回路と、前記電圧電流変換回路が変換した各電流を基に和電流を生成し、生成した和電流を任意の整数mによりm倍した和電流であるm倍和電流を生成する電流加算回路と、前記電流加減算回路が前記n倍差電流に前記m倍和電流を加算して生成した電流を、前記電流加算回路が生成したm倍和電流で除算する電流除算回路と、を備え、前記出力手段が、前記電流除算回路が除算して得た値を出力することを特徴とする。
【0011】
また、本発明に係る請求項5に記載の位置検出装置は、請求項1に記載の位置検出装置において、前記演算回路が、前記磁気センサ対の各磁気センサの出力電圧を基に、差電圧を生成する電圧減算回路と、該磁気センサ対の各磁気センサの出力電圧を基に、和電圧を生成する電圧加算回路と、前記電圧減算回路及び電圧加算回路が生成した差電圧及び和電圧を差電流及び和電流にそれぞれ変換する電圧電流変換回路と、前記電圧電流変換回路が変換した差電流を前記電圧電流変換回路が変換した和電流で除算する電流除算回路と、を備え、前記出力手段が、前記電流除算回路が除算して得た値を出力することを特徴とする。
【0012】
また、本発明に係る請求項6に記載の位置検出装置は、請求項1〜5の何れか1項に記載の位置検出装置において、一の方向に2個の磁気センサが互いに離間されて配置される一の磁気センサ対と、前記一の方向に対して垂直な他の方向に2個の磁気センサが互いに離間されて配置される他の磁気センサ対と、を備え、前記一の磁気センサ対の2個の磁気センサの中間位置と、前記他の磁気センサ対の2個の磁気センサの中間位置とが一致しており、前記磁石が、前記一致する位置を通り前記一の方向及び前記他の方向それぞれに対して垂直な軸線上に配置されることを特徴とする。
【0013】
また、本発明に係る請求項7に記載の位置検出装置は、請求項1〜6の何れか1項に記載の位置検出装置において、前記電流除算回路が、前記除算により電流値を出力しており、前記出力手段が、前記電流除算回路が出力した除算して得た値である電流値を電圧値に変換して出力する電流電圧変換回路であることを特徴とする。
本発明において、出力手段が出力する値は、磁石又は位置検出装置の被検出対象の移動量又は傾斜度合いを示す位置信号となる。
【発明の効果】
【0014】
本発明によれば、磁気センサ対の各磁気センサの差電流をその各磁気センサの和電流で除算することで、磁石及び磁気センサの特性のバラツキや組立精度による影響を抑えることができ、位置検出装置を低消費電流により駆動できる。
また、本発明によれば、各磁気センサの差電流をその各磁気センサの和電流で除算しているので、その除算演算に回路規模が小さい電流除算回路を用いることができ、位置検出装置を小型化できる。
【図面の簡単な説明】
【0015】
【図1】第1の実施形態の位置検出装置を説明するための回路ブロックである。
【図2】検出部の概略の構成例を示す図である。
【図3】第1及び第2磁気センサに対する磁石のX軸方向の位置Xと、第1及び第2磁気センサの出力電圧V1,V2との関係を示す特性図である。
【図4】V/I変換回路の回路構成の一例を示す図である。
【図5】減算回路の回路構成の一例を示す図である。
【図6】加算回路の回路構成の一例を示す図である。
【図7】電流除算回路の回路構成の一例を示す図である。
【図8】電流除算回路及び出力回路の回路構成の一例を示す図である。
【図9】第4の実施形態の位置検出装置を説明するための回路ブロックである。
【図10】第5の実施形態の位置検出装置を説明するための回路ブロックである。
【図11】X軸及びY軸に対応する検出部の概略の構成例を示す図である。
【図12】第1及び第2磁気センサに対する磁石のX軸方向の位置Xと、第1及び第2磁気センサの出力電圧V1X,V2Xとの関係を示す特性図である。
【図13】第3及び第4磁気センサに対する磁石のY軸方向の位置Yと、第3及び第4磁気センサの出力電圧V1Y,V2Yとの関係を示す特性図である。
【発明を実施するための形態】
【0016】
(第1の実施形態)
(構成)
本実施形態は、本発明を適用した位置検出装置である。
位置検出装置は、磁石の移動又は傾斜による周囲の磁界変化を検出して、座標検知を行う磁気検出方式の位置検出装置である。
図1は、位置検出装置の概略構成を示す回路ブロックである。図1に示すように、位置検出装置は、検出部11、V/I変換回路12、減算回路13、加算回路14、電流除算回路15、及び出力回路16を有する。
【0017】
図2は、検出部11の概略の構成例を示す。図1にも示すように、検出部11は、第1及び第2磁気センサ11a,11bを有する。
第1及び第2磁気センサ11a,11bは、互いに離間されて配置された磁気センサ対を構成する。第1及び第2磁気センサ11a,11bは、例えば、ホール素子、半導体磁気抵抗素子、感磁性体磁気抵抗素子、又はGMR素子である。第1磁気センサ11aと第2磁気センサ11bとは、1軸上(X軸)に沿って配置されている。第1及び第2磁気センサ11a,11bには、所定の入力電圧を印加して電流を流す。
【0018】
検出部11では、第1磁気センサ11aと第2磁気センサ11bとの中間付近に、磁石10が配置されている。具体的には、検出部11では、第1磁気センサ11aと第2磁気センサ11bとのほぼ中間位置から、第1磁気センサ11aと第2磁気センサ11bとを結ぶ線に対して垂直方向(Z軸方向)のある位置に、磁石10が配置されている。つまり、検出部11では、磁石10を通る軸(Z軸)に沿うように磁気センサ11a,11bが配設されている。
【0019】
磁石10は、支持部材等により移動自在又は傾斜自在に配設されている。これにより、磁石10は、第1及び第2磁気センサ11a,11bに対して移動自在又は傾斜自在に配置されている。このような構成において、磁石10が移動又は傾斜すると、磁石10の磁界が変化する。この磁界の変化により、磁気センサ11a,11bの出力電圧が変化する。例えば、図2に示すように、X軸方向である矢印AR1の方向に移動すると、X軸方向の磁界が変化する。
【0020】
図3は、第1及び第2磁気センサ11a,11bに対する磁石10のX軸方向の位置Xと、第1及び第2磁気センサ11a,11bの出力電圧V1,V2との関係を示す。
図3に示すように、位置Xが第1及び第2磁気センサ11a,11bから遠いほど、第1及び第2磁気センサ11a,11bの出力電圧V1,V2は小さくなる。また、位置Xが第1及び第2磁気センサ11a,11bに近いほど、第1及び第2磁気センサ11a,11bの出力電圧V1,V2は大きくなる。
検出部11は、各磁気センサ11a,11bの出力電圧V1,V2をV/I変換回路12に出力する。
V/I変換回路12は、磁気センサ11a,11bの出力電圧V1,V2を電流I1,I2に変換する。V/I変換回路12は、電流I1,I2を減算回路13及び加算回路14に出力する。
【0021】
例えば、V/I変換回路12の回路構成例は、図4に示すようになる。
減算回路13は、電流I1,I2を基に下記出力電流(差電流)Io1を生成する。また、加算回路14は、電流I1,I2を基に下記出力電流(和電流)Io2を生成する。
Io1=I1−I2
Io2=I1+I2
減算回路13及び加算回路14は、出力電流Io1,Io2を電流除算回路15に出力する。
【0022】
例えば、減算回路13の回路構成例は、図5に示すようになり、加算回路14の回路構成例は、図6に示すようになる。
電流除算回路15は、出力電流Io1,Io2を基に、下記出力電流Io3を生成する。
Io3=Io1/Io2
=(I1−I2)/(I1+I2)
ここで、電流除算回路15は、マイナス電流の演算ができない。そのため、電流除算回路15では、下記式(I1−I2>0)が成立する場合に除算演算が可能になる。
Io1=I1−I2>0
【0023】
電流除算回路15は、出力電流Io3を出力回路16に出力する。
出力回路16は、電流電圧変換回路である。出力回路16は、下記式のように、電流除算回路15の出力電流Io3に基準電流Iref及び任意のゲインGainを乗算して電圧変換し、位置信号Voを出力する。
Vo=(I1−I2)/(I1+I2)×Iref×Gain
【0024】
例えば、電流除算回路15の回路構成例は、図7に示すようになる。図7に示す回路構成は、トランスリニア原理を用いたものである。
この回路において、
VBE・Q1+VBE・Q2=VBE・Q3+VBE・Q4
とすると、
VBE∝XlogIc
より、
Io×Ix=Iy×Iz
となる。この式を変形すると、
Iz=Io×Ix/Iy
となる。そして、IxをIo1とし、IyをIo2とし、IzをIo3とし、Ioを基準電流Irefとすることで、
Io3=Io1/Io2×Iref
=(I1−I2)/(I1+I2)×Iref
となる。
このIo3に任意のゲインGainを乗算して電圧変換して、位置信号Voを得ることができる。
【0025】
(動作、作用及び効果)
位置検出装置は、磁石10が移動又は傾斜すると、検出部11の磁気センサ11a,11bがその移動又は傾斜に応じた出力電圧V1,V2をV/I変換回路12に出力する。
V/I変換回路12は、磁気センサ11a,11bの出力電圧V1,V2を電流I1,I2に変換して、減算回路13及び加算回路14に出力する。
減算回路13は、電流I1,I2を基に生成した出力電流Io1を電流除算回路15に出力する。また、加算回路14は、電流I1,I2を基に生成した出力電流Io2を電流除算回路15に出力する。
【0026】
電流除算回路15は、出力電流Io1,Io2を基に、除算演算して生成した出力電流Io3を出力回路16に出力する。
出力回路16は、電流除算回路15の出力電流Io3に基準電流Iref及び任意のゲインGainを乗算して電圧変換し、位置信号Voを出力する。
ここで、位置検出装置が、物体の移動又は傾斜を検出する位置検出装置に適用された場合、位置信号Voは、物体の位置、移動量又は傾斜度合いを示す情報となる。また、位置検出装置が、パーソナルコンピュータや携帯電話等の入力手段として使用される位置検出装置に適用された場合、位置信号Voは、入力手段の位置、移動量又は傾斜度合いを示す情報となる。
【0027】
このような位置検出装置では、磁石10及び磁気センサ11a,11bは、温度による特性変化が大きく、環境温度に影響を受けやすい。また、位置検出装置の位置精度は、磁石10及び磁気センサ11a,11bの特性のバラツキや組立精度の影響を受けやすい。
これに対して、第1の実施形態の位置検出装置は、磁気センサ11a,11bの出力電流I1,I2を基に生成した差電流(I1−I2)を、同出力電流I1,I2を基に生成した和電流(I1+I2)で除算演算して、位置信号Voを生成している。
このようにすることで、位置検出装置は、環境温度による影響を抑え、磁石及び磁気センサの特性のバラツキや組立精度による影響を抑えることができる。
【0028】
また、位置検出装置は、環境温度による影響や磁石及び磁気センサの特性のバラツキや組立精度の影響によって磁気センサの出力信号が小さくなる場合でも、除算演算をしない別の方法のように磁気センサへの入力電流を大きくすることもなく、位置信号Voを得ることができる。これにより、位置検出装置は、磁気センサの出力信号の大きさにかかわらず磁気センサへの入力電流を一定にして、位置信号Voを得ることができる。この結果、位置検出装置は、低消費電流による駆動が可能になる。
【0029】
また、位置検出装置は、電流除算回路15により除算演算している。ここで、電流除算回路15は、回路規模の小さい回路である。よって、電流除算回路15の回路規模が小さいため、位置検出装置は、小型化されたものとなる。
なお、この第1の実施形態では、V/I変換回路12は電圧電流変換回路に対応する。減算回路13は電流減算回路に対応する。加算回路14は電流加算回路に対応する。電流除算回路15は電流除算回路に対応する。出力回路16は出力手段に対応する。
【0030】
(第2の実施形態)
(構成)
第2の実施形態は、前記第1の実施形態と同様、位置検出装置である。
第2の実施形態の位置検出装置の構成は、前記図1に示した第1の実施形態の位置検出装置の構成と同一である。しかし、第2の実施形態では、減算回路13の出力電流、加算回路14の出力電流、及び電流除算回路15の出力電流の演算内容が第1の実施形態のものと異なる。
【0031】
以下の説明で、特に言及がない限りは、第2の実施形態の構成は、前記第1の実施形態の構成と同一である。
第2の実施形態では、減算回路13は、電流I1,I2を基に下記出力電流Io1’を生成する。また、加算回路14は、電流I1,I2を基に下記出力電流Io2’を生成する。
Io1’=(I1−I2)+(I1+I2)
Io2’=(I1+I2)
【0032】
減算回路13及び加算回路14は、出力電流Io1’,Io2’を電流除算回路15に出力する。
電流除算回路15は、出力電流Io1’,Io2’を基に、下記出力電流Io3’を生成する。
Io3’=Io1’/Io2’
=((I1−I2)+(I1+I2))/(I1+I2)
=1+(I1−I2)/(I1+I2)
ここで、電流除算回路15は、マイナス電流の演算ができない。そのため、電流除算回路15では、下記式(2×I1>0)が成立する場合に除算演算が可能になる。
Io1’=(I1−I2)+(I1+I2)
=2×I1>0
【0033】
電流除算回路15は、出力電流Io3’を出力回路16に出力する。
出力回路16は、下記式のように、電流除算回路15の出力電流Io3’に基準電流Irefを乗算し、その乗算値から基準電流Irefを減算し、その減算値に任意のゲインGainを乗算して電圧変換し、位置信号Vo’を出力する。
Vo’=(((((I1−I2)+(I1+I2))/(I1+I2))×Iref)−Iref)×Gain
=(I1−I2)/(I1+I2)×Iref×Gain
【0034】
例えば、電流除算回路15及び出力回路16の回路構成例は、図8に示すようになる。図8に示すように、回路には、電流Io1’(=(I1−I2)+(I1+I2)),Io2’(=(I1+I2))、基準電流Iref0,Iref1がそれぞれ入力されている。そして、電流Io1’は、NPNトランジスタQ1のコレクタ電流IC1となり、電流Io2’は、NPNトランジスタQ2のコレクタ電流IC2となり、基準電流Iref1は、NPNトランジスタQ3のコレクタ電流IC3となり、基準電流Iref0は、NPNトランジスタQ4のコレクタ電流IC4となる。
【0035】
このような回路において、出力電圧(位置信号)Vo’は、
Vo’=IC4・Rout
である。一方、
Ic4=α・IE4
≒α・IS・eq・VBE4/(K・T)
となる。ここで、Isは順方向活性領域のトランジスタの伝達特性を表す定数、kはボルツマン定数、Tは絶対温度、qは電子電荷である。
【0036】
さらに、この式を変形すると、
VBE4=K・T/q・ln(IC4/(α・IS))
となる。
また、NPNトランジスタQ1,Q2,Q3,Q4のベース電圧の関係は、
VBE4=VBE1−VBE2+VBE3
である。そして、それらベース−エミッタ間電圧は、コレクタ電流ICによって決まるため、
VBE4=K・T/q・(ln(IC1/(α・IS))−ln(IC2/(α・IS))+ln(IC3/(α・IS)))
=K・T/q・(ln(IC1・IC3)/(α・IS・IC2))
となる。
【0037】
よって、NPNトランジスタQ1,Q2,Q3,Q4のマッチングがとれていると、出力電圧は、
Vo’=IC4・Rout=(IC1・IC3/IC2)・Rout
となる。
そして、電流割算回路ではマイナス電流の割算ができないことから、出力電圧(位置信号)Vo’を以下のように導出する。さらに、このとき、Iref1=Iref0とすると、
Vo’=(Io1’/Io2’×Iref1−Iref0)×Rout
=((Io1/Io2×Iref1)+Iref1−Iref0)×Rout
=(Io1/Io2)×Iref1×Rout
=(I1−I2)/(I1+I2)×Iref1×Rout
となる。そして、Iref1をIrefとし、RoutをGainとすることで、前述の式と同じ
Vo’=(I1−I2)/(I1+I2)×Iref×Gain
を導出できる。
【0038】
(動作、作用及び効果)
位置検出装置は、磁石10が移動又は傾斜すると、検出部11の磁気センサ11a,11bがその移動又は傾斜に応じた出力電圧V1,V2をV/I変換回路12に出力する。
V/I変換回路12は、磁気センサ11a,11bの出力電圧V1,V2を電流I1,I2に変換して、減算回路13及び加算回路14に出力する。
減算回路13は、電流I1,I2を基に生成した出力電流Io1’を電流除算回路15に出力する。また、加算回路14は、電流I1,I2を基に生成した出力電流Io2’を電流除算回路15に出力する。
【0039】
電流除算回路15は、出力電流Io1’,Io2’を基に除算演算して生成した出力電流Io3’を出力回路16に出力する。
出力回路16は、電流除算回路15の出力電流Io3’を、基準電流Iref及び任意のゲインGainを用いて電圧変換し、位置信号Vo’を出力する。
ここで、第2の実施形態では、前記第1の実施形態との差異として、減算回路13の出力電流Io1’の演算内容を変更している。この演算内容の変更により、電流除算回路15では、下記式が成立する場合に除算演算が可能となっている。
2×I1>0
【0040】
この式によれば、第1磁気センサ11aの出力電流I1が正である全ての場合に、電流除算回路15による除算演算が可能になる。
この結果、第2の実施形態の位置検出装置は、前記第1の実施形態と比較して、磁石10の磁界の変化の検出可能範囲が広がり、磁石10の移動距離が長い場合や磁石10の姿勢変化が大きい場合にも対応できるようになる。
【0041】
また、第2の実施形態の位置検出装置が出力する位置信号Vo’は、前記第1の実施形態の位置検出装置が出力する位置信号Voと同じ値となる。そして、第2の実施形態でも、前記第1の実施形態と同様な効果を得ることができる。
すなわち、第2の実施形態の位置検出装置は、磁気センサ11a,11bの出力電流I1,I2を基に生成した差電流(I1−I2)を、同出力電流I1,I2を基に生成した和電流(I1+I2)で除算演算して、位置信号Vo’を生成している。
このようにすることで、位置検出装置は、環境温度による影響を抑え、磁石及び磁気センサの特性のバラツキや組立精度による影響を抑えることができる。
【0042】
また、位置検出装置は、環境温度による影響や磁石及び磁気センサの特性のバラツキや組立精度の影響によって磁気センサの出力信号が小さくなる場合でも、除算演算をしない別の方法のように磁気センサへの入力電流を大きくすることもなく、位置信号Vo’を得ることができる。これにより、位置検出装置は、磁気センサの出力信号の大きさにかかわらず磁気センサへの入力電流を一定にして、位置信号Vo’を得ることができる。この結果、位置検出装置は、低消費電流による駆動が可能になる。
また、位置検出装置は、電流除算回路15により除算演算している。ここで、電流除算回路15は、回路規模の小さい回路である。よって、電流除算回路15の回路規模が小さいため、位置検出装置は、小型化されたものとなる。
なお、この第2の実施形態では、減算回路13は電流加減算回路に対応する。
【0043】
(第3の実施形態)
(構成)
第3の実施形態は、前記第1及び第2の実施形態と同様、位置検出装置である。
第3の実施形態の位置検出装置の構成は、前記図1に示した第1及び第2の実施形態の位置検出装置の構成と同一である。しかし、第3の実施形態では、減算回路13の出力電流、加算回路14の出力電流、及び電流除算回路15の出力電流の演算内容が第1及び第2の実施形態のものと異なる。
以下の説明で、特に言及がない限りは、第3の実施形態の構成は、前記第1及び第2の実施形態の構成と同一である。
【0044】
第3の実施形態では、減算回路13は、電流I1,I2を基に下記出力電流Io1’’を生成する。また、加算回路14は、電流I1,I2を基に下記出力電流Io2’’を生成する。
Io1’’=n×(I1−I2)+m×(I1+I2)
Io2’’=m×(I1+I2)
ここで、n、mは任意の定数である。
【0045】
減算回路13及び加算回路14は、出力電流Io1’’,Io2’’を電流除算回路15に出力する。
電流除算回路15は、出力電流Io1’’,Io2’’を基に、下記出力電流Io3’’を生成する。
Io3’’=Io1’’/Io2’’
=(n×(I1−I2)+m×(I1+I2))/(m×(I1+I2))
=1+n×(I1−I2)/(m×(I1+I2))
【0046】
ここで、電流除算回路15は、マイナス電流の演算ができない。そのため、電流除算回路15では、下記式(n×(I1−I2)+m×(I1+I2)>0)が成立する場合に除算演算が可能になる。
Io1’’=n×(I1−I2)+m×(I1+I2)>0
電流除算回路15は、出力電流Io3’’を出力回路16に出力する。
出力回路16は、下記式のように、電流除算回路15の出力電流Io3’’に基準電流Irefを乗算し、その乗算値から基準電流Irefを減算し、その減算値に任意のゲインGainを乗算して電圧変換し、位置信号Vo’’を出力する。
Vo’’=((((n×(I1−I2)+m×(I1+I2))/(m×(I1+I2)))×Iref)−Iref)×Gain
=(n/m)×(I1−I2)/(I1+I2)×Iref×Gain
【0047】
(動作、作用及び効果)
位置検出装置は、磁石10が移動又は傾斜すると、検出部11の磁気センサ11a,11bがその移動又は傾斜に応じた出力電圧V1,V2をV/I変換回路12に出力する。
V/I変換回路12は、磁気センサ11a,11bの出力電圧V1,V2を電流I1,I2に変換して、減算回路13及び加算回路14に出力する。
減算回路13は、電流I1,I2を基に生成した出力電流(差電流)Io1’’を電流除算回路15に出力する。また、加算回路14は、電流I1,I2を基に生成した出力電流(和電流)Io2’’を電流除算回路15に出力する。
【0048】
電流除算回路15は、出力電流Io1’’,Io2’’を基に除算演算して生成した出力電流Io3’’を出力回路16に出力する。
出力回路16は、電流除算回路15の出力電流Io3’’を、基準電流Iref及び任意のゲインGainを用いて電圧変換し、位置信号Vo’’を出力する。
ここで、第3の実施形態では、前記第1及び第2の実施形態との差異として、減算回路13の出力電流Io1’’の演算内容を変更している。この演算内容の変更により、電流除算回路15では、下記式が成立する場合に除算演算が可能となっている。
n×(I1−I2)+m×(I1+I2)>0
【0049】
この式によれば、適切な定数n,mを選択することにより、前記第1及び第2の実施形態と比較して、磁石10の磁界の変化の検出可能範囲が広がり、磁石10の移動距離が長い場合や磁石10の姿勢変化が大きい場合にも対応できるようになる。
例えば、n=1、m=2とした場合、
1×(I1−I2)+2×(I1+I2)
=3×I1+I2>0
となる。この場合、
I1>−1/3+I2
が除算演算可能な範囲、すなわち、磁石10の磁界の変化の検出可能範囲となる。よって、第2の実施形態における除算可能な範囲が(2×I1>0)となるから、第3の実施形態における磁界の変化の検出可能範囲は、第2の実施形態における磁界の変化の検出可能範囲よりも広くなる。
【0050】
また、第3の実施形態の位置検出装置が出力する位置信号Vo’’は、前記第1の実施形態の位置検出装置が出力する位置信号Vo,Vo’に対してn/m倍の大きさになるだけである。そして、第3の実施形態でも、前記第1及び第2の実施形態と同様な効果を得ることができる。
すなわち、第3の実施形態の位置検出装置は、磁気センサ11a,11bの出力電流I1,I2を基に生成した差電流(I1−I2)(又は(n×(I1−I2)))を、同出力電流I1,I2を基に生成した和電流(I1+I2)(又は(m×(I1+I2)))で除算演算して、位置信号Vo’’を生成している。
このようにすることで、位置検出装置は、環境温度による影響を抑え、磁石及び磁気センサの特性のバラツキや組立精度による影響を抑えることができる。
【0051】
また、位置検出装置は、環境温度による影響や磁石及び磁気センサの特性のバラツキや組立精度の影響によって磁気センサの出力信号が小さくなる場合でも、除算演算をしない別の方法のように磁気センサへの入力電流を大きくすることもなく、位置信号Vo’’を得ることができる。すなわち、位置検出装置は、磁気センサの出力信号の大きさにかかわらず磁気センサへの入力電流を一定にして、位置信号Vo’’を得ることができる。この結果、位置検出装置は、低消費電流による駆動が可能になる。
また、位置検出装置は、電流除算回路15により除算演算している。ここで、電流除算回路15は、回路規模の小さい回路である。よって、電流除算回路15の回路規模が小さいため、位置検出装置は、小型化されたものとなる。
なお、この第3の実施形態では、減算回路13は電流加減算回路に対応する。
【0052】
(第4の実施形態)
(構成)
第4の実施形態は、前記第1〜第3の実施形態と同様、位置検出装置である。
第4の実施形態では、V/I変換回路による電圧を電流に変換するタイミングが前記第1〜第3の実施形態のものと異なっている。すなわち、第4の実施形態では、V/I変換部に入力する信号が前記第1〜第3の実施形態のものと異なる。
図9は、第4の実施形態の位置検出装置の概略構成を示す回路ブロックである。
図9に示すように、位置検出装置は、検出部11、減算回路21、加算回路22、V/I変換回路23、電流除算回路15、及び出力回路16を有する。
【0053】
以下の説明で、特に言及がない限りは、第4の実施形態の構成は、前記第1の実施形態の構成(図1に示す構成)と同一である。
検出部11は、各磁気センサ11a,11bの出力電圧V1,V2を減算回路21及び加算回路22に出力する。
減算回路21は、電圧減算回路である。減算回路21は、出力電圧V1,V2を基に下記出力電圧(差電圧)Vo1を生成する。また、加算回路22は、電圧加算回路である。加算回路22は、出力電圧V1,V2を基に下記出力電圧(和電圧)Vo2を生成する。
Vo1=V1−I2
Vo2=V1+I2
【0054】
減算回路21及び加算回路22は、出力電圧Vo1,Vo2をV/I変換回路23に出力する。
V/I変換回路23は、電圧電流変換回路である。V/I変換回路23は、出力電圧Vo1,Vo2を下記出力電流(差電流及び和電流)Io1,Io2にそれぞれ変換する。
Io1=I1−I2
Io2=I1+I2
V/I変換回路23は、出力電流Io1,Io2を電流除算回路15に出力する。
そして、前記第1の実施形態と同様に、電流除算回路15は、出力電流Io1,Io2を基に出力電流Io3を生成し、生成した出力電流Io3を出力回路16に出力する。出力回路16は、電流除算回路15の出力電流Io3に基準電流Iref及び任意のゲインGainを乗算して電圧変換し、位置信号Voを出力する。
【0055】
(動作、作用及び効果)
位置検出装置は、磁石10が移動又は傾斜すると、検出部11の磁気センサ11a,11bがその移動又は傾斜に応じた出力電圧V1,V2を減算回路21及び加算回路22に出力する。
減算回路21は、出力電圧V1,V2を基に生成した差電圧Vo1をV/I変換回路23に出力する。また、加算回路22は、出力電圧V1,V2を基に生成した和電圧Vo2をV/I変換回路23に出力する。
V/I変換回路23は、減算回路21及び加算回路22の出力電圧Vo1,Vo2を出力電流(差電流及び和電流)Io1,Io2に変換して、電流除算回路15に出力する。
【0056】
電流除算回路15は、出力電流Io1,Io2を基に、除算演算して生成した出力電流Io3を出力回路16に出力する。
出力回路16は、電流除算回路15の出力電流Io3に基準電流Iref及び任意のゲインGainを乗算して電圧変換し、位置信号Voを出力する。
ここで、第4の実施形態では、減算回路21と加算回路22を電圧演算回路とし、V/I変換回路23が、減算回路21と加算回路22とが出力する差電圧Vo1及び和電圧Vo2を差電流及び和電流Io1,Io2に変換して、電流除算回路15に出力している。
【0057】
これにより、第4の実施形態の位置検出装置でも、電流除算回路15が差電流(I1−I2)を和電流(I1+I2)で除算演算して、位置信号Voを生成している。よって、第4の実施形態でも、前記第1〜第3の実施形態と同様な効果を得ることができる。
すなわち、位置検出装置は、環境温度による影響を抑え、磁石及び磁気センサの特性のバラツキや組立精度による影響を抑えることができる。
【0058】
また、位置検出装置は、環境温度による影響や磁石及び磁気センサの特性のバラツキや組立精度の影響によって磁気センサの出力信号が小さくなる場合でも、除算演算をしない別の方法のように磁気センサへの入力電流を大きくすることもなく、位置信号Voを得ることができる。すなわち、位置検出装置は、磁気センサの出力信号の大きさにかかわらず、位置信号Voを得ることができる。この結果、位置検出装置は、低消費電流による駆動が可能になる。
また、位置検出装置は、電流除算回路15により除算演算している。ここで、電流除算回路15は、回路規模の小さい回路である。よって、電流除算回路15の回路規模が小さいため、位置検出装置は、小型化されたものとなる。
【0059】
(第5の実施形態)
(構成)
第5の実施形態は、前記第1〜第4の実施形態と同様、位置検出装置である。
第5の実施形態では、X軸及びY軸(2軸)に対応して検出部を有する。すなわち、第5の実施形態では、4個(2対)の磁気センサを有しており、その点が前記第1〜第4の実施形態のものと異なる。
図10は、第5の実施形態の位置検出装置の概略構成を示す回路ブロックである。
図10に示すように、位置検出装置は、X軸及びY軸に対応する検出部11X,11Yを有し、そのX軸及びY軸用検出部11X,11Yに対応して、X軸及びY軸用V/I変換回路12X,12Y、X軸及びY軸用減算回路13X,13Y、X軸及びY軸用加算回路14X,14Y、X軸及びY軸用電流除算回路15X,15Y、X軸及びY軸用及び出力回路16X,16Yを有する。
【0060】
図11は、X軸及びY軸用検出部11X,11Yの概略の構成例を示す。図10にも示すように、X軸の検出部11Xは、磁気センサ(以下、第1及び第2磁気センサという。)11Xa,11Xbを有する。また、Y軸の検出部11Yは、磁気センサ(以下、第3及び第4磁気センサという。)11Ya,11Ybを有する。
第1〜第4磁気センサ11Xa,11Xb,11Ya,11Ybは、前記第1〜第4の実施形態と同様に、例えば、ホール素子、半導体磁気抵抗素子、感磁性体磁気抵抗素子、又はGMR素子である。
【0061】
第1磁気センサ11Xaと第2磁気センサ11Xbとは、X軸に沿って互いに離間されて配置されている。また、第3磁気センサ11Yaと第4磁気センサ11Ybとは、X軸に対して垂直なY軸に沿って互いに離間されて配置されている。そして、第1磁気センサ11Xaと第2磁気センサ11Xbとの中間付近で、かつ第3磁気センサ11Yaと第4磁気センサ11Ybとの中間付近に、磁石10が配置されている。具体的には、第1磁気センサ11Xaと第2磁気センサ11Xbの中間位置と、第3磁気センサ11Yaと第4磁気センサ11Ybの中間位置とが一致しており、磁石10は、その一致する位置を通りX軸及びY軸それぞれに対して垂直な軸線上に配置されている。
【0062】
このような構成において、磁石10が移動又は傾斜すると、磁石10の磁界が変化する。この磁界の変化により、磁気センサ11Xa,11Xb,11Ya,11Ybの出力電圧が変化する。例えば、図11に示すように、X軸方向である矢印AR1の方向に移動すると、X軸方向の磁界が変化し、第1及び第2磁気センサ11Xa,11Xbの出力電圧が変化する。また、Y軸方向である矢印AR2の方向に移動すると、Y軸方向の磁界が変化し、第3及び第4磁気センサ11Ya,11Ybの出力電圧が変化する。
【0063】
図12は、第1及び第2磁気センサ11Xa,11Xbに対する磁石10のX軸方向の位置Xと、第1及び第2磁気センサ11Xa,11Xbの出力電圧V1X,V2Xとの関係を示す。
図12に示すように、位置Xが第1及び第2磁気センサ11Xa,11Xbから遠いほど、第1及び第2磁気センサ11Xa,11Xbの出力電圧V1X,V2Xは小さくなる。また、位置Xが第1及び第2磁気センサ11Xa,11Xbに近いほど、第1及び第2磁気センサ11Xa,11Xbの出力電圧V1X,V2Xは大きくなる。
【0064】
図13は、第3及び第4磁気センサ11Ya,11Ybに対する磁石10のY軸方向の位置Yと、第3及び第4磁気センサ11Ya,11Ybの出力電圧V1Y,V2Yとの関係を示す。
図13に示すように、位置Yが第3及び第4磁気センサ11Ya,11Ybから遠いほど、第3及び第4磁気センサ11Ya,11Ybの出力電圧V1Y,V2Yは小さくなる。また、位置Yが第3及び第4磁気センサ11Ya,11Ybに近いほど、第3及び第4磁気センサ11Ya,11Ybの出力電圧V1Y,V2Yは大きくなる。
【0065】
X軸用検出部11Xは、第1及び第2磁気センサ11Xa,11Xbの出力電圧V1X,V2XをX軸用V/I変換回路12Xに出力する。また、Y軸用検出部11Yは、第3及び第4磁気センサ11Ya,11Ybの出力電圧V1Y,V2YをY軸用V/I変換回路12Yに出力する。
X軸用V/I変換回路12Xは、第1及び第2磁気センサ11Xa,11Xbの出力電圧V1X,V2Xを電流I1X,I2Xに変換する。X軸用V/I変換回路12Xは、電流I1X,I2XをX軸用減算回路13X及びX軸用加算回路14Xに出力する。
【0066】
X軸用減算回路13Xは、電流I1X,I2Xを基に下記出力電流(差電流)Io1Xを生成する。また、X軸用加算回路14Xは、電流I1X,I2Xを基に下記出力電流(和電流)Io2Xを生成する。
Io1X=I1X−I2X
Io2X=I1X+I2X
X軸用減算回路13X及びX軸用加算回路14Xは、出力電流Io1X,Io2XをX軸用電流除算回路15Xに出力する。
X軸用電流除算回路15Xは、出力電流Io1X,Io2Xを基に、下記出力電流Io3Xを生成する。
Io3X=Io1X/Io2X
=(I1X−I2X)/(I1X+I2X)
【0067】
ここで、X軸用電流除算回路15Xは、マイナス電流の演算ができない。そのため、X軸用電流除算回路15Xでは、下記式(I1X−I2X>0)が成立する場合に除算演算が可能になる。
Io1X=I1X−I2X>0
X軸用電流除算回路15Xは、出力電流Io3XをX軸用出力回路16Xに出力する。
X軸用出力回路16Xは、下記式のように、X軸用電流除算回路15Xの出力電流Io3Xに基準電流Iref及び任意のゲインGainを乗算して電圧変換し、位置信号VoXを出力する。
VoX=(I1X−I2X)/(I1X+I2X)×Iref×Gain
【0068】
同様に、Y軸用V/I変換回路12Yは、第3及び第4磁気センサ11Ya,11Ybの出力電圧V1Y,V2Yを電流I1Y,I2Yに変換する。V/I変換回路12Yは、電流I1Y,I2YをY軸用減算回路13Y及びY軸用加算回路14Yに出力する。
Y軸用減算回路13Yは、電流I1Y,I2Yを基に下記出力電流(差電流)Io1Yを生成する。また、Y軸用加算回路14Yは、電流I1Y,I2Yを基に下記出力電流(和電流)Io2Yを生成する。
Io1Y=I1Y−I2Y
Io2Y=I1Y+I2Y
【0069】
Y軸用減算回路13Y及びY軸用加算回路14Yは、出力電流Io1Y,Io2YをY軸用電流除算回路15Yに出力する。
Y軸用電流除算回路15Yは、出力電流Io1Y,Io2Yを基に、下記出力電流Io3Yを生成する。
Io3Y=Io1Y/Io2Y
=(I1Y−I2Y)/(I1Y+I2Y)
【0070】
ここで、Y軸用電流除算回路15Yは、マイナス電流の演算ができない。そのため、Y軸用電流除算回路15Yでは、下記式(I1Y−I2Y>0)が成立する場合に除算演算が可能になる。
Io1Y=I1Y−I2Y>0
Y軸用電流除算回路15Yは、出力電流Io3YをY軸用出力回路16Yに出力する。
Y軸用出力回路16Yは、下記式のように、Y軸用電流除算回路15Yの出力電流Io3Yに基準電流Iref及び任意のゲインGainを乗算して電圧変換し、位置信号VoYを出力する。
VoY=(I1Y−I2Y)/(I1Y+I2Y)×Iref×Gain
【0071】
(動作、作用及び効果)
第5の実施形態の位置検出装置は、前記第1の実施形態の位置検出装置とはX軸(1軸)だけでなくY軸にも(2軸に)検出部を備える点で異なる。そして、第5の実施形態の位置検出装置では、X軸及びY軸に対応する位置信号VoX,VoYを、前記第1の実施形態の位置検出装置が位置信号Voを得る処理と同様な処理により得ている。これにより、第5の実施形態でも、前記第1の実施形態と同様な効果を得ることができる。
【0072】
すなわち、第5の実施形態の位置検出装置は、第1及び第2磁気センサ11Xa,11Xbの出力電流I1X,I2Xを基に生成した差電流(I1X−I2X)を、同出力電流I1X,I2Xを基に生成した和電流(I1X+I2X)で除算演算して、位置信号VoXを生成している。さらに、第5の実施形態の位置検出装置は、同様にして、第3及び第4磁気センサ11Ya,11Ybの出力電流I1Y,I2Yを基に生成した差電流(I1Y−I2Y)を、同出力電流I1Y,I2Yを基に生成した和電流(I1Y+I2Y)で除算演算して、位置信号VoYを生成している。
このようにすることで、位置検出装置は、環境温度による影響を抑え、磁石及び磁気センサの特性のバラツキや組立精度による影響を抑えることができる。
【0073】
また、位置検出装置は、環境温度による影響や磁石及び磁気センサの特性のバラツキや組立精度の影響によって磁気センサの出力信号が小さくなる場合でも、除算演算をしない別の方法のように磁気センサへの入力電流を大きくすることもなく、位置信号VoX,VoYを得ることができる。すなわち、位置検出装置は、磁気センサの出力信号の大きさにかかわらず磁気センサへの入力電流を一定にして、位置信号VoX,VoYを得ることができる。この結果、位置検出装置は、低消費電流による駆動が可能になる。
【0074】
また、第5の実施形態の位置検出装置は、X軸及びY軸用電流除算回路15X,15Yにより除算演算している。ここで、X軸及びY軸用電流除算回路15X,15Yは、回路規模の小さい回路である。よって、X軸及びY軸用電流除算回路15X,15Yの回路規模が小さいため、位置検出装置は、小型化されたものとなる。
なお、この第5の実施形態では、X軸及びY軸用V/I変換回路12X,12Yは電圧電流変換回路に対応する。X軸及びY軸用減算回路13X,13Yは電流減算回路に対応する。X軸及びY軸用加算回路14X,14Yは電流加算回路に対応する。X軸及びY軸用電流除算回路15X,15Yは電流除算回路に対応する。X軸及びY軸用出力回路16X,16Yは出力手段に対応する。
【0075】
(実施形態の変形例)
(1)第5の実施形態のように4個(2対)の磁気センサを用いて、前記第2〜第4の実施形態のような演算内容により、位置信号を得ることもできる。
(2)第2及び第3の実施形態では、減算回路13が差電流(I1−I2)又は差電流(n×(I1−I2))に和電流(I1+I2)又は和電流(m×(I1+I2))を加算した電流Io1’又は電流Io1’’を生成している。これに対して、加算回路14が生成した和電流(I1+I2)又は和電流(m×(I1+I2))を減算回路13に出力して、減算回路13が加算回路14から得た和電流(I1+I2)又は和電流(m×(I1+I2))を用いて、電流Io1’又は電流Io1’’を生成することもできる。
(3)本実施形態では、2個(1対)の磁気センサ又は4個(2対)の磁気センサにより位置検出装置(検出部)を構成している。これに対して、6個以上(3対以上)の磁気センサにより位置検出装置(検出部)を構成することもできる。
【符号の説明】
【0076】
10 磁石、11 検出部、11a,11b 磁気センサ、12,23 V/I変換回路(演算回路、電圧電流変換回路)、13 減算回路(演算回路、電流減算回路)、14 加算回路(演算回路、電流加算回路)、15 電流除算回路(演算回路、電流除算回路)、16 出力回路(出力手段)、21 減算回路(演算回路、電圧減算回路)、22 加算回路(演算回路、電圧加算回路)
【特許請求の範囲】
【請求項1】
2個の磁気センサが互いに離間されて配置される少なくとも1つの磁気センサ対と、
前記磁気センサ対に対して移動自在又は傾斜自在に配設される磁石と、
前記磁気センサ対の各磁気センサの差電流に基づいた値を、該各磁気センサの和電流で除算する演算回路と、
前記演算回路が除算して得た値を出力する出力手段と、
を備えることを特徴とする位置検出装置。
【請求項2】
前記演算回路は、前記磁気センサ対の各磁気センサの出力電圧を電流に変換する電圧電流変換回路と、前記電圧電流変換回路が変換した各電流を基に、前記差電流を生成する電流減算回路と、前記電圧電流変換回路が変換した各電流を基に、前記和電流を生成する電流加算回路と、前記電流減算回路が生成した差電流を前記電流加算回路が生成した和電流で除算する電流除算回路と、を備え、
前記出力手段は、前記電流除算回路が除算して得た値を出力することを特徴とする請求項1に記載の位置検出装置。
【請求項3】
前記演算回路は、前記磁気センサ対の各磁気センサの出力電圧を電流に変換する電圧電流変換回路と、前記電圧電流変換回路が変換した各電流を基に生成した差電流に、前記電圧電流変換回路が変換した各電流を基に生成した和電流を加算した電流を生成する電流加減算回路と、前記電圧電流変換回路が変換した各電流を基に、前記和電流を生成する電流加算回路と、前記電流加減算回路が前記差電流に前記和電流を加算して生成した電流を、前記電流加算回路が生成した和電流で除算する電流除算回路と、を備え、
前記出力手段は、前記電流除算回路が除算して得た値を出力することを特徴とする請求項1に記載の位置検出装置。
【請求項4】
前記演算回路は、前記磁気センサ対の各磁気センサの出力電圧を電流に変換する電圧電流変換回路と、前記電圧電流変換回路が変換した各電流を基に生成した差電流を任意の整数nによりn倍した差電流であるn倍差電流に、前記電圧電流変換回路が変換した各電流を基に生成した和電流を任意の整数mによりm倍した和電流であるm倍和電流を加算した電流を生成する電流加減算回路と、前記電圧電流変換回路が変換した各電流を基に和電流を生成し、生成した和電流を任意の整数mによりm倍した和電流であるm倍和電流を生成する電流加算回路と、前記電流加減算回路が前記n倍差電流に前記m倍和電流を加算して生成した電流を、前記電流加算回路が生成したm倍和電流で除算する電流除算回路と、を備え、
前記出力手段は、前記電流除算回路が除算して得た値を出力することを特徴とする請求項1に記載の位置検出装置。
【請求項5】
前記演算回路は、前記磁気センサ対の各磁気センサの出力電圧を基に、差電圧を生成する電圧減算回路と、該磁気センサ対の各磁気センサの出力電圧を基に、和電圧を生成する電圧加算回路と、前記電圧減算回路及び電圧加算回路が生成した差電圧及び和電圧を差電流及び和電流にそれぞれ変換する電圧電流変換回路と、前記電圧電流変換回路が変換した差電流を前記電圧電流変換回路が変換した和電流で除算する電流除算回路と、を備え、
前記出力手段は、前記電流除算回路が除算して得た値を出力することを特徴とする請求項1に記載の位置検出装置。
【請求項6】
一の方向に2個の磁気センサが互いに離間されて配置される一の磁気センサ対と、前記一の方向に対して垂直な他の方向に2個の磁気センサが互いに離間されて配置される他の磁気センサ対と、を備え、前記一の磁気センサ対の2個の磁気センサの中間位置と、前記他の磁気センサ対の2個の磁気センサの中間位置とが一致しており、
前記磁石は、前記一致する位置を通り前記一の方向及び前記他の方向それぞれに対して垂直な軸線上に配置されることを特徴とする請求項1〜5の何れか1項に記載の位置検出装置。
【請求項7】
前記電流除算回路は、前記除算により電流値を出力しており、
前記出力手段は、前記電流除算回路が出力した除算して得た値である電流値を電圧値に変換して出力する電流電圧変換回路であることを特徴とする請求項1〜6の何れか1項に記載の位置検出装置。
【請求項1】
2個の磁気センサが互いに離間されて配置される少なくとも1つの磁気センサ対と、
前記磁気センサ対に対して移動自在又は傾斜自在に配設される磁石と、
前記磁気センサ対の各磁気センサの差電流に基づいた値を、該各磁気センサの和電流で除算する演算回路と、
前記演算回路が除算して得た値を出力する出力手段と、
を備えることを特徴とする位置検出装置。
【請求項2】
前記演算回路は、前記磁気センサ対の各磁気センサの出力電圧を電流に変換する電圧電流変換回路と、前記電圧電流変換回路が変換した各電流を基に、前記差電流を生成する電流減算回路と、前記電圧電流変換回路が変換した各電流を基に、前記和電流を生成する電流加算回路と、前記電流減算回路が生成した差電流を前記電流加算回路が生成した和電流で除算する電流除算回路と、を備え、
前記出力手段は、前記電流除算回路が除算して得た値を出力することを特徴とする請求項1に記載の位置検出装置。
【請求項3】
前記演算回路は、前記磁気センサ対の各磁気センサの出力電圧を電流に変換する電圧電流変換回路と、前記電圧電流変換回路が変換した各電流を基に生成した差電流に、前記電圧電流変換回路が変換した各電流を基に生成した和電流を加算した電流を生成する電流加減算回路と、前記電圧電流変換回路が変換した各電流を基に、前記和電流を生成する電流加算回路と、前記電流加減算回路が前記差電流に前記和電流を加算して生成した電流を、前記電流加算回路が生成した和電流で除算する電流除算回路と、を備え、
前記出力手段は、前記電流除算回路が除算して得た値を出力することを特徴とする請求項1に記載の位置検出装置。
【請求項4】
前記演算回路は、前記磁気センサ対の各磁気センサの出力電圧を電流に変換する電圧電流変換回路と、前記電圧電流変換回路が変換した各電流を基に生成した差電流を任意の整数nによりn倍した差電流であるn倍差電流に、前記電圧電流変換回路が変換した各電流を基に生成した和電流を任意の整数mによりm倍した和電流であるm倍和電流を加算した電流を生成する電流加減算回路と、前記電圧電流変換回路が変換した各電流を基に和電流を生成し、生成した和電流を任意の整数mによりm倍した和電流であるm倍和電流を生成する電流加算回路と、前記電流加減算回路が前記n倍差電流に前記m倍和電流を加算して生成した電流を、前記電流加算回路が生成したm倍和電流で除算する電流除算回路と、を備え、
前記出力手段は、前記電流除算回路が除算して得た値を出力することを特徴とする請求項1に記載の位置検出装置。
【請求項5】
前記演算回路は、前記磁気センサ対の各磁気センサの出力電圧を基に、差電圧を生成する電圧減算回路と、該磁気センサ対の各磁気センサの出力電圧を基に、和電圧を生成する電圧加算回路と、前記電圧減算回路及び電圧加算回路が生成した差電圧及び和電圧を差電流及び和電流にそれぞれ変換する電圧電流変換回路と、前記電圧電流変換回路が変換した差電流を前記電圧電流変換回路が変換した和電流で除算する電流除算回路と、を備え、
前記出力手段は、前記電流除算回路が除算して得た値を出力することを特徴とする請求項1に記載の位置検出装置。
【請求項6】
一の方向に2個の磁気センサが互いに離間されて配置される一の磁気センサ対と、前記一の方向に対して垂直な他の方向に2個の磁気センサが互いに離間されて配置される他の磁気センサ対と、を備え、前記一の磁気センサ対の2個の磁気センサの中間位置と、前記他の磁気センサ対の2個の磁気センサの中間位置とが一致しており、
前記磁石は、前記一致する位置を通り前記一の方向及び前記他の方向それぞれに対して垂直な軸線上に配置されることを特徴とする請求項1〜5の何れか1項に記載の位置検出装置。
【請求項7】
前記電流除算回路は、前記除算により電流値を出力しており、
前記出力手段は、前記電流除算回路が出力した除算して得た値である電流値を電圧値に変換して出力する電流電圧変換回路であることを特徴とする請求項1〜6の何れか1項に記載の位置検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】

【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−38919(P2011−38919A)
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願番号】特願2009−187245(P2009−187245)
【出願日】平成21年8月12日(2009.8.12)
【出願人】(303046277)旭化成エレクトロニクス株式会社 (840)
【Fターム(参考)】
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願日】平成21年8月12日(2009.8.12)
【出願人】(303046277)旭化成エレクトロニクス株式会社 (840)
【Fターム(参考)】
[ Back to top ]