
位置検出装置
【課題】外部ノイズまたは外部磁界があっても磁束密度検出の直線性精度を確保した位置検出装置を得る。
【解決手段】第1の固定磁性体10と第2の固定磁性体20のギャップは、直線部12と直線部21が対向する側で狭く、さらに突出部22等の磁性体で囲まれているため、外部磁界等の影響を比較的受け難い。一方、直線部13と直線部21が対向する側のギャップは広いので外部磁界等の影響を受け易いため、シールド板50を配置して耐性を確保する。
【解決手段】第1の固定磁性体10と第2の固定磁性体20のギャップは、直線部12と直線部21が対向する側で狭く、さらに突出部22等の磁性体で囲まれているため、外部磁界等の影響を比較的受け難い。一方、直線部13と直線部21が対向する側のギャップは広いので外部磁界等の影響を受け易いため、シールド板50を配置して耐性を確保する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、直線運動をする物体の移動位置を検出する位置検出装置に関する。
【背景技術】
【0002】
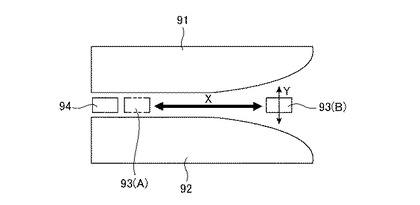
従来の位置検出装置は、例えば特許文献1に開示されている。図4は、従来の位置検出装置の構成を示す正面図である。位置検出装置は、第1の固定磁性体(磁束案内部材)91、第2の固定磁性体(磁束案内部材)92、磁界発生体(マグネット)93、磁気センサ(磁気電気変換要素)94で構成されている。磁界発生体93は、第1の固定磁性体91と第2の固定磁性体92の対向面間を直線的に移動し(図4に矢印Xで示す方向)、これら第1の固定磁性体91および第2の固定磁性体92の対向する内面側は曲線形状である。第1の固定磁性体91と第2の固定磁性体92の内面側を曲線形状とすることで、磁界発生体93と第1および第2の固定磁性体91,92との距離(図4に矢印Yで示す)が磁界発生体93の移動位置に応じて変化するようにしている。この距離(位置関係)が変わることにより、磁界発生体93の移動位置に応じて、磁気センサ94を通過する磁束密度が変化する。その磁束密度の変化量を磁気センサ94で検知し、電気信号に変換する。この電気信号が磁界発生体93の位置に対して直線的な関係を有する信号であることから、磁気センサ94の出力信号から磁界発生体93の位置情報を検出できる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特表2005−515459号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような構成の位置検出装置では、磁界発生体93と第1および第2の固定磁性体91,92との距離(ギャップ)の変化によって位置を検出しているため、磁界発生体93の移動範囲のどちらか一端でギャップが広くなる。
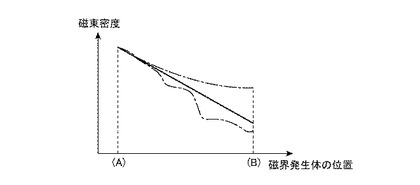
図5に、従来の位置検出装置における、磁界発生体93の移動位置に応じた磁束密度の変化のグラフを示す。グラフの縦軸は磁束密度、横軸は磁界発生体93の移動位置であり、A,Bは図4の磁界発生体93(A),(B)の位置に相当する。第1および第2の固定磁性体91,92のギャップが狭い側(A)は、外部ノイズおよび外部磁界の影響を比較的受け難いが、ギャップが広い側(B)は第1および第2の固定磁性体91,92で囲まれていない面積が大きいため、外部ノイズおよび外部磁界が位置検出装置内の磁束に与える影響が大きい。そのため、外部ノイズまたは外部磁界のないときは、グラフに実線で示すように磁束密度検出の直線性が確保できるが、外部ノイズまたは外部磁界があると、一点鎖線で示すように直線性精度が低下するという課題があった。
【0005】
この発明は、上記のような課題を解決するためになされたもので、外部ノイズまたは外部磁界があっても磁束密度検出の直線性精度を確保した位置検出装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係る位置検出装置は、N極の極性面およびその裏側にS極の極性面を有し、往復運動する駆動軸に取り付けられて当該NS極が並ぶ磁極方向と直交する方向に移動する磁界発生体と、磁界発生体の一方の極性面に対向して配置される曲線部を有する第1の固定磁性体と、磁界発生体のもう一方の極性面に対向して配置され、磁界発生体の移動方向に平行な直線部を有する第2の固定磁性体と、第1の固定磁性体と第2の固定磁性体との対向面に挟まれた状態に設置され、駆動軸の往復運動に応じて磁界発生体と第1の固定磁性体との間の磁極方向の距離が変化することで、通過する磁束が変化することから磁界発生体の位置を検出する磁気センサと、第1の固定磁性体の曲線部から第2の固定磁性体の直線部までの対向距離が長い側に配置されたシールド板とを備えるものである。
【発明の効果】
【0007】
この発明によれば、第1の固定磁性体の曲線部から第2の固定磁性体の直線部までの対向距離が長い側にシールド板を配置するようにしたので、外部ノイズまたは外部磁界があっても位置検出装置内の磁束が影響を受け難くなり、磁束密度検出の直線性精度を確保することができる。
【図面の簡単な説明】
【0008】
【図1】この発明の実施の形態1に係る位置検出装置の基本構成を示す正面図である。
【図2】この発明の実施の形態2に係る位置検出装置の基本構成を示す正面図である。
【図3】この発明の実施の形態3に係る位置検出装置の基本構成を示す正面図である。
【図4】従来の位置検出装置の基本構成を示す正面図である。
【図5】従来の位置検出装置において磁気センサが検出する磁束密度のグラフであり、外部ノイズまたは外部磁界がある場合を一点鎖線、ない場合を実線で示す。
【発明を実施するための形態】
【0009】
実施の形態1.
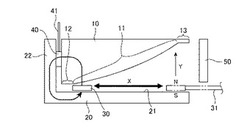
図1はこの発明の実施の形態1における位置検出装置の基本構成図を示しており、ステータとなる第1の固定磁性体10および第2の固定磁性体20と、マグネットの磁界発生体30と、磁気センサ40と、シールド板50とを備えている。
【0010】
磁界発生体30は、N極とS極の双方の極性を有する面を備えており、この磁界発生体30はN極とS極が並ぶ方向(以下、磁極方向Y)と直交する方向(以下、移動方向X)に移動する。磁界発生体30の一方の極性面に対向して第1の固定磁性体10が配置され、磁界発生体30のもう一方の極性面に対向して、第2の固定磁性体20が配置されている。
なお、図1では第1の固定磁性体10をN極側に、第2の固定磁性体20をS極側に配置した例を示したが、極性は逆であってもよい。また、この磁界発生体30はアクチュエータの駆動軸31などに取り付けられており、駆動軸31が移動方向Xに往復運動(直動)することにより、この駆動軸31と一体になった磁界発生体30も移動方向Xへ移動する。
【0011】
第1の固定磁性体10の磁界発生体30に対向する側の面は、曲線部11と2箇所の直線部12,13とから構成されている。図1の例では、直線部12,13が磁界発生体30の移動範囲の両側端部に形成され、直線部12,13の間に曲線部11が形成されている。この曲線部11は、滑らかな曲線形状でなくてもよく、多数の直線を含む多角形状であってもよい。直線部12,13は、磁界発生体30の移動方向Xに平行な直線形状である。
他方、第2の固定磁性体20の磁界発生体30に対向する側の面(先述の第1の固定磁性体10の対向面)は、磁界発生体30の移動方向Xと平行な直線部21と、直線部21の一端側を垂直に曲げた突出部22とから構成されている。この突出部22が第1の固定磁性体10と対向しているため、第1の固定磁性体10と第2の固定磁性体20の対向面で構成されるギャップは、移動方向Xの延長線上から第1の固定磁性体10側へ垂直に曲がった形状になっている。
【0012】
磁界発生体30は、第1の固定磁性体10と第2の固定磁性体20の対向面で構成されるギャップ中を、第2の固定磁性体20の直線部21と一定の距離を保ちながら移動方向Xに移動する。
また、第1の固定磁性体10と第2の固定磁性体20の間に磁気センサ40が設置され、リードワイヤ(電極端子)41が外部へ出されている。図1の例においては、磁気センサ40が、第1の固定磁性体10と突出部22の間に挟まれた状態に設置されている。
【0013】
磁界発生体30のN極から出る磁力線は、第1の固定磁性体10を通って突出部22から第2の固定磁性体20に入り、磁界発生体30のS極へ戻り、磁気センサ40が第1の固定磁性体10と第2の固定磁性体20の間を通過する磁束を検知する。そして、磁界発生体30の移動方向Xへの移動に応じて、磁界発生体30と第1の固定磁性体10との間の磁極方向Yの距離が変化することで、磁気センサ40を通過する磁束(密度)が変化することから、磁界発生体30の位置、ひいては駆動軸31の位置を検出することができる。位置検出装置の位置検出原理は、先行例と同じである。
【0014】
この位置検出装置は、磁界発生体30の移動に応じた磁束密度の特性が線形になるように、第1の固定磁性体10の曲線部11および直線部12,13の形状を決定している。図示例では磁界発生体30が直線部12側に移動すると磁束密度が高くなり、直線部13側に移動すると磁束密度が低くなる。
直線部12と直線部21が対面している側は、ギャップが狭く、さらに磁性体である突出部22に覆われているため、外部ノイズおよび外部磁界の影響を比較的受け難い。一方、直線部13と直線部21が対面している側は、ギャップが広く、かつ、磁性体に覆われていない面積が広いため、外部ノイズおよび外部磁界の影響を受け易い。
【0015】
そこで、ギャップの広い側に、図1に示すような磁性体のシールド板50を配置して、位置検出装置内の磁束が外部ノイズまたは外部磁界の影響を受けないようにする。また、シールド板50を磁界発生体30の移動範囲外に配置して、シールド板50が位置検出装置内の磁束に影響を及ぼさないようにする。
【0016】
なお、磁界発生体30は、永久磁石であり、例えば、サマリウム・コバルト系の方形磁石を使用する。
磁気センサ40は、内部に温度検知素子が含まれ、温度補償機能をプログラムできるASIC(Application Specific Integrated Circuit;特定用途向け半導体)付きホール素子を使用する。そして、これらの機能を有するホールICを磁気センサ40に用い、ゼロ点および出力勾配を調整しておき、高温環境でも出力が変動しない構成にする。
【0017】
以上より、実施の形態1によれば、位置検出装置は、N極の極性面およびその裏側にS極の極性面を有し、往復運動する駆動軸31に取り付けられて当該NS極が並ぶ磁極方向Yと直交する方向Xに移動する磁界発生体30と、磁界発生体30の一方の極性面に対向して配置される曲線部11を有する第1の固定磁性体10と、磁界発生体30のもう一方の極性面に対向して配置され磁界発生体30の移動方向Xに平行な直線部21を有する第2の固定磁性体20と、第1の固定磁性体10と第2の固定磁性体20との対向面に挟まれた状態に設置され、駆動軸31の往復運動に応じて磁界発生体30と第1の固定磁性体10との間の磁極方向Yの距離が変化することで、通過する磁束が変化することから磁界発生体30の位置を検出する磁気センサ40と、第1の固定磁性体10の曲線部11から第2の固定磁性体20の直線部21までの対向距離が長い側に配置されたシールド板50とを備えるように構成した。このため、外部ノイズまたは外部磁界があっても位置検出装置内の磁束が影響を受け難くなり、磁束密度検出の直線性精度を確保することができる。
【0018】
実施の形態2.
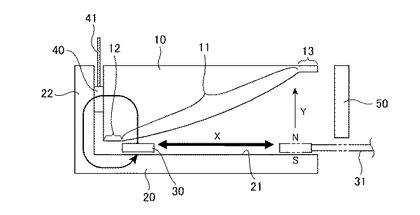
図2は、この発明の実施の形態2に係る位置検出装置を示す図である。なお、図2において図1と同一または相当の部分については同一の符号を付し説明を省略する。
本実施の形態2では、シールド板50aを第1の固定磁性体10の直線部13側の端部に接続している。このとき、シールド板50aは、位置検出装置内の磁束に影響を及ぼさないよう、磁気飽和に十分な断面積とする。
なお、上記実施の形態1と同様に、シールド板50aを磁界発生体30の移動範囲外に配置して、位置検出装置内の磁束に影響を及ぼさないようにする。
【0019】
以上より、実施の形態2によれば、位置検出装置は、シールド板50aと第1の固定磁性体10とを一体に形成するようにしたので、部品点数を削減し装置構造を簡易にすることができ、安価な構造で外部ノイズおよび外部磁界対策を行うことができる。
【0020】
実施の形態3.
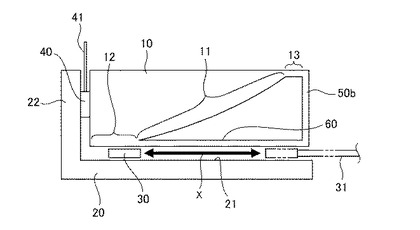
図3は、この発明の実施の形態3に係る位置検出装置を示す図である。なお、図3において図1および図2と同一または相当の部分については同一の符号を付し説明を省略する。
本実施の形態3でも、上記実施の形態2と同様にシールド板50bの上端部を第1の固定磁性体10の直線部13の端部に接続している。
さらに実施の形態3では、第1の固定磁性体10の曲線部11より磁界発生体30に近い位置に、磁界発生体30の移動方向Xに平行な直線部60を形成し、直線部60の端部にシールド板50bの下端部を接続している。なお、直線部60は、位置検出装置内の磁束に影響を及ぼさないよう、磁気飽和に十分な断面積とする。シールド板50bを直線部13,60で両持ちすることにより、固定強度を高めることができる。また、直線部60を磁界発生体30の移動方向Xへの可動ガイドまたは摺動面として利用すれば、磁界発生体30の磁極方向Yへのずれを防止でき、位置検出精度を高めることができる。
【0021】
以上より、実施の形態3によれば、位置検出装置は、第1の固定磁性体10の曲線部11より磁界発生体30に近い位置に、当該磁界発生体30の移動方向Xに平行な直線部60を有し、シールド板50bは、直線部60と曲線部11に延設された直線部13とにそれぞれ接続するように、第1の固定磁性体10と一体形成する構成にした。このため、部品点数を削減し装置構造を簡易にしつつ、シールド板50bの固定強度を向上することができる。また、直線部60を磁界発生体30の可動ガイドまたは摺動面として利用できるので、簡易な構造で位置検出精度を向上することができる。
【0022】
なお、上記実施の形態1〜3において、第1の固定磁性体10と第2の固定磁性体20は磁性体であればよいが、積層鋼板で構成されている方がより好ましい。積層鋼板を使用することにより、第1の固定磁性体10および第2の固定磁性体20に発生する渦電流が抑制され、磁界発生体30の磁束を磁気センサ40で検出されやすくなるためである。
また、圧粉鉄芯で構成されていてもよい。積層鋼板同様に、渦電流を抑制できる。
【0023】
また、上記実施の形態1〜3において、位置検出装置を収容する筐体の一面をシールド板50,50a,50bで構成してもよい。
【0024】
また、図1に示したように、駆動軸31を挿通するためにシールド板50の下端部を短くしたが、これに限定されるものではなく、例えば駆動軸31がシールド板50を迂回する形状にして、または、駆動軸31がシールド板50を貫通する形状にして、シールド板50の下端部を延長してもよい。さらに、シールド板50の図面紙上奥側への厚みを、第1の固定磁性体10および第2の固定磁性体20の同方向への厚みより厚くしてもよい。
シールド板50a,50bも同様に変形可能である。
【0025】
上記以外にも、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【0026】
以上のように、この発明に係る位置検出装置は、外部ノイズおよび外部磁界に対する耐性を確保したので、車両に搭載されるスロットルバルブ、EGR(Exhaust Gas Recirculation)バルブ、WG(Waste Gate)バルブ、VG(Variabe Geometric)ターボシステムの可動ベーンなどを駆動するアクチュエータのシャフト位置を検出する位置検出装置などに用いるのに適している。
【符号の説明】
【0027】
10 第1の固定磁性体、11 曲線部、12,13 直線部、20 第2の固定磁性体、21 直線部、22 突出部、30 磁界発生体、31 駆動軸、40 磁気センサ
50,50a,50b シールド板、60 直線部。
【技術分野】
【0001】
この発明は、直線運動をする物体の移動位置を検出する位置検出装置に関する。
【背景技術】
【0002】
従来の位置検出装置は、例えば特許文献1に開示されている。図4は、従来の位置検出装置の構成を示す正面図である。位置検出装置は、第1の固定磁性体(磁束案内部材)91、第2の固定磁性体(磁束案内部材)92、磁界発生体(マグネット)93、磁気センサ(磁気電気変換要素)94で構成されている。磁界発生体93は、第1の固定磁性体91と第2の固定磁性体92の対向面間を直線的に移動し(図4に矢印Xで示す方向)、これら第1の固定磁性体91および第2の固定磁性体92の対向する内面側は曲線形状である。第1の固定磁性体91と第2の固定磁性体92の内面側を曲線形状とすることで、磁界発生体93と第1および第2の固定磁性体91,92との距離(図4に矢印Yで示す)が磁界発生体93の移動位置に応じて変化するようにしている。この距離(位置関係)が変わることにより、磁界発生体93の移動位置に応じて、磁気センサ94を通過する磁束密度が変化する。その磁束密度の変化量を磁気センサ94で検知し、電気信号に変換する。この電気信号が磁界発生体93の位置に対して直線的な関係を有する信号であることから、磁気センサ94の出力信号から磁界発生体93の位置情報を検出できる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特表2005−515459号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような構成の位置検出装置では、磁界発生体93と第1および第2の固定磁性体91,92との距離(ギャップ)の変化によって位置を検出しているため、磁界発生体93の移動範囲のどちらか一端でギャップが広くなる。
図5に、従来の位置検出装置における、磁界発生体93の移動位置に応じた磁束密度の変化のグラフを示す。グラフの縦軸は磁束密度、横軸は磁界発生体93の移動位置であり、A,Bは図4の磁界発生体93(A),(B)の位置に相当する。第1および第2の固定磁性体91,92のギャップが狭い側(A)は、外部ノイズおよび外部磁界の影響を比較的受け難いが、ギャップが広い側(B)は第1および第2の固定磁性体91,92で囲まれていない面積が大きいため、外部ノイズおよび外部磁界が位置検出装置内の磁束に与える影響が大きい。そのため、外部ノイズまたは外部磁界のないときは、グラフに実線で示すように磁束密度検出の直線性が確保できるが、外部ノイズまたは外部磁界があると、一点鎖線で示すように直線性精度が低下するという課題があった。
【0005】
この発明は、上記のような課題を解決するためになされたもので、外部ノイズまたは外部磁界があっても磁束密度検出の直線性精度を確保した位置検出装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係る位置検出装置は、N極の極性面およびその裏側にS極の極性面を有し、往復運動する駆動軸に取り付けられて当該NS極が並ぶ磁極方向と直交する方向に移動する磁界発生体と、磁界発生体の一方の極性面に対向して配置される曲線部を有する第1の固定磁性体と、磁界発生体のもう一方の極性面に対向して配置され、磁界発生体の移動方向に平行な直線部を有する第2の固定磁性体と、第1の固定磁性体と第2の固定磁性体との対向面に挟まれた状態に設置され、駆動軸の往復運動に応じて磁界発生体と第1の固定磁性体との間の磁極方向の距離が変化することで、通過する磁束が変化することから磁界発生体の位置を検出する磁気センサと、第1の固定磁性体の曲線部から第2の固定磁性体の直線部までの対向距離が長い側に配置されたシールド板とを備えるものである。
【発明の効果】
【0007】
この発明によれば、第1の固定磁性体の曲線部から第2の固定磁性体の直線部までの対向距離が長い側にシールド板を配置するようにしたので、外部ノイズまたは外部磁界があっても位置検出装置内の磁束が影響を受け難くなり、磁束密度検出の直線性精度を確保することができる。
【図面の簡単な説明】
【0008】
【図1】この発明の実施の形態1に係る位置検出装置の基本構成を示す正面図である。
【図2】この発明の実施の形態2に係る位置検出装置の基本構成を示す正面図である。
【図3】この発明の実施の形態3に係る位置検出装置の基本構成を示す正面図である。
【図4】従来の位置検出装置の基本構成を示す正面図である。
【図5】従来の位置検出装置において磁気センサが検出する磁束密度のグラフであり、外部ノイズまたは外部磁界がある場合を一点鎖線、ない場合を実線で示す。
【発明を実施するための形態】
【0009】
実施の形態1.
図1はこの発明の実施の形態1における位置検出装置の基本構成図を示しており、ステータとなる第1の固定磁性体10および第2の固定磁性体20と、マグネットの磁界発生体30と、磁気センサ40と、シールド板50とを備えている。
【0010】
磁界発生体30は、N極とS極の双方の極性を有する面を備えており、この磁界発生体30はN極とS極が並ぶ方向(以下、磁極方向Y)と直交する方向(以下、移動方向X)に移動する。磁界発生体30の一方の極性面に対向して第1の固定磁性体10が配置され、磁界発生体30のもう一方の極性面に対向して、第2の固定磁性体20が配置されている。
なお、図1では第1の固定磁性体10をN極側に、第2の固定磁性体20をS極側に配置した例を示したが、極性は逆であってもよい。また、この磁界発生体30はアクチュエータの駆動軸31などに取り付けられており、駆動軸31が移動方向Xに往復運動(直動)することにより、この駆動軸31と一体になった磁界発生体30も移動方向Xへ移動する。
【0011】
第1の固定磁性体10の磁界発生体30に対向する側の面は、曲線部11と2箇所の直線部12,13とから構成されている。図1の例では、直線部12,13が磁界発生体30の移動範囲の両側端部に形成され、直線部12,13の間に曲線部11が形成されている。この曲線部11は、滑らかな曲線形状でなくてもよく、多数の直線を含む多角形状であってもよい。直線部12,13は、磁界発生体30の移動方向Xに平行な直線形状である。
他方、第2の固定磁性体20の磁界発生体30に対向する側の面(先述の第1の固定磁性体10の対向面)は、磁界発生体30の移動方向Xと平行な直線部21と、直線部21の一端側を垂直に曲げた突出部22とから構成されている。この突出部22が第1の固定磁性体10と対向しているため、第1の固定磁性体10と第2の固定磁性体20の対向面で構成されるギャップは、移動方向Xの延長線上から第1の固定磁性体10側へ垂直に曲がった形状になっている。
【0012】
磁界発生体30は、第1の固定磁性体10と第2の固定磁性体20の対向面で構成されるギャップ中を、第2の固定磁性体20の直線部21と一定の距離を保ちながら移動方向Xに移動する。
また、第1の固定磁性体10と第2の固定磁性体20の間に磁気センサ40が設置され、リードワイヤ(電極端子)41が外部へ出されている。図1の例においては、磁気センサ40が、第1の固定磁性体10と突出部22の間に挟まれた状態に設置されている。
【0013】
磁界発生体30のN極から出る磁力線は、第1の固定磁性体10を通って突出部22から第2の固定磁性体20に入り、磁界発生体30のS極へ戻り、磁気センサ40が第1の固定磁性体10と第2の固定磁性体20の間を通過する磁束を検知する。そして、磁界発生体30の移動方向Xへの移動に応じて、磁界発生体30と第1の固定磁性体10との間の磁極方向Yの距離が変化することで、磁気センサ40を通過する磁束(密度)が変化することから、磁界発生体30の位置、ひいては駆動軸31の位置を検出することができる。位置検出装置の位置検出原理は、先行例と同じである。
【0014】
この位置検出装置は、磁界発生体30の移動に応じた磁束密度の特性が線形になるように、第1の固定磁性体10の曲線部11および直線部12,13の形状を決定している。図示例では磁界発生体30が直線部12側に移動すると磁束密度が高くなり、直線部13側に移動すると磁束密度が低くなる。
直線部12と直線部21が対面している側は、ギャップが狭く、さらに磁性体である突出部22に覆われているため、外部ノイズおよび外部磁界の影響を比較的受け難い。一方、直線部13と直線部21が対面している側は、ギャップが広く、かつ、磁性体に覆われていない面積が広いため、外部ノイズおよび外部磁界の影響を受け易い。
【0015】
そこで、ギャップの広い側に、図1に示すような磁性体のシールド板50を配置して、位置検出装置内の磁束が外部ノイズまたは外部磁界の影響を受けないようにする。また、シールド板50を磁界発生体30の移動範囲外に配置して、シールド板50が位置検出装置内の磁束に影響を及ぼさないようにする。
【0016】
なお、磁界発生体30は、永久磁石であり、例えば、サマリウム・コバルト系の方形磁石を使用する。
磁気センサ40は、内部に温度検知素子が含まれ、温度補償機能をプログラムできるASIC(Application Specific Integrated Circuit;特定用途向け半導体)付きホール素子を使用する。そして、これらの機能を有するホールICを磁気センサ40に用い、ゼロ点および出力勾配を調整しておき、高温環境でも出力が変動しない構成にする。
【0017】
以上より、実施の形態1によれば、位置検出装置は、N極の極性面およびその裏側にS極の極性面を有し、往復運動する駆動軸31に取り付けられて当該NS極が並ぶ磁極方向Yと直交する方向Xに移動する磁界発生体30と、磁界発生体30の一方の極性面に対向して配置される曲線部11を有する第1の固定磁性体10と、磁界発生体30のもう一方の極性面に対向して配置され磁界発生体30の移動方向Xに平行な直線部21を有する第2の固定磁性体20と、第1の固定磁性体10と第2の固定磁性体20との対向面に挟まれた状態に設置され、駆動軸31の往復運動に応じて磁界発生体30と第1の固定磁性体10との間の磁極方向Yの距離が変化することで、通過する磁束が変化することから磁界発生体30の位置を検出する磁気センサ40と、第1の固定磁性体10の曲線部11から第2の固定磁性体20の直線部21までの対向距離が長い側に配置されたシールド板50とを備えるように構成した。このため、外部ノイズまたは外部磁界があっても位置検出装置内の磁束が影響を受け難くなり、磁束密度検出の直線性精度を確保することができる。
【0018】
実施の形態2.
図2は、この発明の実施の形態2に係る位置検出装置を示す図である。なお、図2において図1と同一または相当の部分については同一の符号を付し説明を省略する。
本実施の形態2では、シールド板50aを第1の固定磁性体10の直線部13側の端部に接続している。このとき、シールド板50aは、位置検出装置内の磁束に影響を及ぼさないよう、磁気飽和に十分な断面積とする。
なお、上記実施の形態1と同様に、シールド板50aを磁界発生体30の移動範囲外に配置して、位置検出装置内の磁束に影響を及ぼさないようにする。
【0019】
以上より、実施の形態2によれば、位置検出装置は、シールド板50aと第1の固定磁性体10とを一体に形成するようにしたので、部品点数を削減し装置構造を簡易にすることができ、安価な構造で外部ノイズおよび外部磁界対策を行うことができる。
【0020】
実施の形態3.
図3は、この発明の実施の形態3に係る位置検出装置を示す図である。なお、図3において図1および図2と同一または相当の部分については同一の符号を付し説明を省略する。
本実施の形態3でも、上記実施の形態2と同様にシールド板50bの上端部を第1の固定磁性体10の直線部13の端部に接続している。
さらに実施の形態3では、第1の固定磁性体10の曲線部11より磁界発生体30に近い位置に、磁界発生体30の移動方向Xに平行な直線部60を形成し、直線部60の端部にシールド板50bの下端部を接続している。なお、直線部60は、位置検出装置内の磁束に影響を及ぼさないよう、磁気飽和に十分な断面積とする。シールド板50bを直線部13,60で両持ちすることにより、固定強度を高めることができる。また、直線部60を磁界発生体30の移動方向Xへの可動ガイドまたは摺動面として利用すれば、磁界発生体30の磁極方向Yへのずれを防止でき、位置検出精度を高めることができる。
【0021】
以上より、実施の形態3によれば、位置検出装置は、第1の固定磁性体10の曲線部11より磁界発生体30に近い位置に、当該磁界発生体30の移動方向Xに平行な直線部60を有し、シールド板50bは、直線部60と曲線部11に延設された直線部13とにそれぞれ接続するように、第1の固定磁性体10と一体形成する構成にした。このため、部品点数を削減し装置構造を簡易にしつつ、シールド板50bの固定強度を向上することができる。また、直線部60を磁界発生体30の可動ガイドまたは摺動面として利用できるので、簡易な構造で位置検出精度を向上することができる。
【0022】
なお、上記実施の形態1〜3において、第1の固定磁性体10と第2の固定磁性体20は磁性体であればよいが、積層鋼板で構成されている方がより好ましい。積層鋼板を使用することにより、第1の固定磁性体10および第2の固定磁性体20に発生する渦電流が抑制され、磁界発生体30の磁束を磁気センサ40で検出されやすくなるためである。
また、圧粉鉄芯で構成されていてもよい。積層鋼板同様に、渦電流を抑制できる。
【0023】
また、上記実施の形態1〜3において、位置検出装置を収容する筐体の一面をシールド板50,50a,50bで構成してもよい。
【0024】
また、図1に示したように、駆動軸31を挿通するためにシールド板50の下端部を短くしたが、これに限定されるものではなく、例えば駆動軸31がシールド板50を迂回する形状にして、または、駆動軸31がシールド板50を貫通する形状にして、シールド板50の下端部を延長してもよい。さらに、シールド板50の図面紙上奥側への厚みを、第1の固定磁性体10および第2の固定磁性体20の同方向への厚みより厚くしてもよい。
シールド板50a,50bも同様に変形可能である。
【0025】
上記以外にも、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【0026】
以上のように、この発明に係る位置検出装置は、外部ノイズおよび外部磁界に対する耐性を確保したので、車両に搭載されるスロットルバルブ、EGR(Exhaust Gas Recirculation)バルブ、WG(Waste Gate)バルブ、VG(Variabe Geometric)ターボシステムの可動ベーンなどを駆動するアクチュエータのシャフト位置を検出する位置検出装置などに用いるのに適している。
【符号の説明】
【0027】
10 第1の固定磁性体、11 曲線部、12,13 直線部、20 第2の固定磁性体、21 直線部、22 突出部、30 磁界発生体、31 駆動軸、40 磁気センサ
50,50a,50b シールド板、60 直線部。
【特許請求の範囲】
【請求項1】
N極の極性面およびその裏側にS極の極性面を有し、往復運動する駆動軸に取り付けられて当該NS極が並ぶ磁極方向と直交する方向に移動する磁界発生体と、
前記磁界発生体の一方の極性面に対向して配置される曲線部を有する第1の固定磁性体と、
前記磁界発生体のもう一方の極性面に対向して配置され、前記磁界発生体の移動方向に平行な直線部を有する第2の固定磁性体と、
前記第1の固定磁性体と前記第2の固定磁性体との対向面に挟まれた状態に設置され、前記駆動軸の往復運動に応じて前記磁界発生体と前記第1の固定磁性体との間の前記磁極方向の距離が変化することで、通過する磁束が変化することから前記磁界発生体の位置を検出する磁気センサと、
前記第1の固定磁性体の曲線部から前記第2の固定磁性体の直線部までの対向距離が長い側に配置されたシールド板とを備える位置検出装置。
【請求項2】
シールド板は、第1の固定磁性体と一体に形成されたことを特徴とする請求項1記載の位置検出装置。
【請求項3】
第1の固定磁性体は、曲線部より磁界発生体に近い位置に、当該磁界発生体の移動方向に平行な直線部を有し、
シールド板は、前記第1の固定磁性体の前記曲線部および前記直線部にそれぞれ接続するように一体に形成されたことを特徴とする請求項1記載の位置検出装置。
【請求項4】
シールド板は、位置検出装置の筐体の一部であることを特徴とする請求項1から請求項3のうちのいずれか1項記載の位置検出装置。
【請求項1】
N極の極性面およびその裏側にS極の極性面を有し、往復運動する駆動軸に取り付けられて当該NS極が並ぶ磁極方向と直交する方向に移動する磁界発生体と、
前記磁界発生体の一方の極性面に対向して配置される曲線部を有する第1の固定磁性体と、
前記磁界発生体のもう一方の極性面に対向して配置され、前記磁界発生体の移動方向に平行な直線部を有する第2の固定磁性体と、
前記第1の固定磁性体と前記第2の固定磁性体との対向面に挟まれた状態に設置され、前記駆動軸の往復運動に応じて前記磁界発生体と前記第1の固定磁性体との間の前記磁極方向の距離が変化することで、通過する磁束が変化することから前記磁界発生体の位置を検出する磁気センサと、
前記第1の固定磁性体の曲線部から前記第2の固定磁性体の直線部までの対向距離が長い側に配置されたシールド板とを備える位置検出装置。
【請求項2】
シールド板は、第1の固定磁性体と一体に形成されたことを特徴とする請求項1記載の位置検出装置。
【請求項3】
第1の固定磁性体は、曲線部より磁界発生体に近い位置に、当該磁界発生体の移動方向に平行な直線部を有し、
シールド板は、前記第1の固定磁性体の前記曲線部および前記直線部にそれぞれ接続するように一体に形成されたことを特徴とする請求項1記載の位置検出装置。
【請求項4】
シールド板は、位置検出装置の筐体の一部であることを特徴とする請求項1から請求項3のうちのいずれか1項記載の位置検出装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−88171(P2013−88171A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−226765(P2011−226765)
【出願日】平成23年10月14日(2011.10.14)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月14日(2011.10.14)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]