
位置検索装置、位置検索システム、位置取得装置、位置検索方法、位置収集装置、位置収集方法、プログラムおよび記録媒体
【課題】簡易に使用でき製品がいつどこに置かれていたかを覚えているがその製品名を正確に思い出せない場合であっても使用できる製品の位置検索システム等を提供する。
【解決手段】位置検索装置10を過去に物体OBJが存在したと思われる地点Aへ向けて入力装置16等を押下すると検索開始指示情報が入力される。光線放射部22が照射光源12に光線70を放射させて地点Aを指示し装置位置算出部23が位置センサ11を用いて位置検索装置10の位置情報を算出する。測定部24が測定装置13に対し地点Aとの距離R、仰角θ及び方位角αを測定させ地点位置取得部25は上記位置情報と距離R等に基づき地点Aの位置情報を求める。検索部26は上記地点Aの位置情報及び入力された時期情報に照合する履歴を存在位置履歴記録部40から検索し出力部27は当該履歴中で最新の時期情報に対応する位置情報を物体OBJの現在位置として出力装置15へ出力する。
【解決手段】位置検索装置10を過去に物体OBJが存在したと思われる地点Aへ向けて入力装置16等を押下すると検索開始指示情報が入力される。光線放射部22が照射光源12に光線70を放射させて地点Aを指示し装置位置算出部23が位置センサ11を用いて位置検索装置10の位置情報を算出する。測定部24が測定装置13に対し地点Aとの距離R、仰角θ及び方位角αを測定させ地点位置取得部25は上記位置情報と距離R等に基づき地点Aの位置情報を求める。検索部26は上記地点Aの位置情報及び入力された時期情報に照合する履歴を存在位置履歴記録部40から検索し出力部27は当該履歴中で最新の時期情報に対応する位置情報を物体OBJの現在位置として出力装置15へ出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体の現在位置を検索する位置検索装置等および物体の現在位置を収集する位置収集装置等に関する。
【背景技術】
【0002】
近年、ICチップおよびアンテナを内蔵した無線自動識別(Radio Frequency IDentification : RFID)タグの利用が盛んに行なわれている。RFIDタグのICチップ中のメモリには情報が記録されており、外部のRFIDリーダによってこの情報が読取られる。RFIDタグは製品等に添付するだけでなく、そのまま製品等に埋め込むこともできる。RFIDタグには電池を内蔵するアクティブ型と電池を内蔵しないパッシブ型との2種類がある。アクティブ型は内蔵する電池により送受信を行なうものであり、交信距離は長いが電池を内蔵するため小型化は難しく価格は高めである。一方、パッシブ型は外部のRFIDリーダから非接触電力伝送により電波を受け取り、そのエネルギにより送受信を行なうものであり、小型化および低価格化は可能であるが交信距離は限られる。非接触電力伝送としては、距離が数ミリセンチから数10センチの場合、一般に電磁誘導方式が用いられている。
【0003】
現在、RFIDタグを利用した種々の技術的提案および枠組みの検討が行なわれている。このような技術的提案等のための標準化団体も存在しており、各々枠組みを示している(例えば、非特許文献1および2を参照。)。いずれも基本的には同様であり、まずRFIDタグに記録された情報(ID。例えば製品識別コード)をRFIDリーダ(無線自動識別タグ読取器)によって読取り、当該IDを所定のサーバへ送信する。所定のサーバはインターネットを介して別のサーバへ当該IDを送り、別のサーバは当該IDに基づく情報(例えば製品情報)を有するデータベースサーバのインターネット上のアドレスを解決して所定のサーバへ送り返す。この後、所定のサーバはデータベースサーバへ当該IDを送り、データベースサーバは当該IDに基づき情報(例えば製品情報)を取り出して所定のサーバへ送る。以上のように、標準化団体は主としてRFIDタグが添付された製品等の同定または識別のための枠組み等の検討を行なっている。
【0004】
上述の検討等以外に、製品(例えば本)が置かれた位置を検索する位置検索システムが検討されている。この位置検索システムでは、例えば図書館等において各本にRFIDタグを添付しておき、各書棚にRFIDリーダを設置しておく。ユーザがRFIDリーダと接続された端末等から所望の本の名前を入力すると、各書棚に設置されたRFIDリーダが各本のRFIDタグを読取り、結果的にユーザの所望の本が現在置かれている位置を端末等に表示することができる。
【0005】
【非特許文献1】“EPCネットワーク”、[online]、AUTO-ID LABS JAPAN、[平成16年5月27日検索]、インターネット<URL:http://www.auto-id.jp/tech/index-j.html>
【非特許文献2】“ユビキタスIDアーキテクチャ”、[online]、ユビキタスIDセンタ、[平成16年5月27日検索]、インターネット <URL:http://www.uidcenter.org/japanese/architecture.html>
【発明の開示】
【発明が解決しようとする課題】
【0006】
上述のように、RFIDタグが添付された製品等の同定等のための検討以外に、製品等の位置を検索するシステムの検討が行なわれている。しかし、上述の位置検索システムでは、ユーザが情報端末等から製品名を入力する必要があったため、ユーザにとって煩雑な作業を要するシステムであった。さらに一般的には、ユーザは製品がいつどこに置かれていたかを覚えていても、その製品名を正確に思い出せない場合もある。このような場合、上述のような位置検索システムでは製品名を入力することができないため、まったく使用することができないという問題があった。
【0007】
そこで、本発明の目的は、上記問題を解決するためになされたものであり、ユーザにとって簡易に使用することができ、製品がいつどこに置かれていたかを覚えているがその製品名を正確に思い出せない場合であっても使用することができる製品の位置検索システム等を提供することにある。
【課題を解決するための手段】
【0008】
この発明の位置検索装置は、物体の現在位置を検索する位置検索装置であって、該位置検索装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置検索装置との間の距離を所定の方式に基づいて測定し、該位置検索装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部とを備え、前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段と、前記検索開始指示情報に基づき、前記位置センサを用いて前記位置検索装置の位置情報を算出する装置位置算出手段と、前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により取得された前記位置検索装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段と、前記装置位置算出手段により取得された前記位置検索装置の位置情報と、前記測定手段により測定された前記地点と該位置検索装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段と、前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報に照合する履歴を前記存在位置履歴記録部から検索する検索手段と、前記検索手段により検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記出力装置へ出力する出力手段とを備えたことを特徴とする。
【0009】
ここで、この発明の位置検索装置において、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器と、該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部とをさらに備え、前記検索手段により照合する履歴が検索されなかった場合、前記物体情報記録部に記録された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得する識別子取得手段と、前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、前記識別子取得手段により取得された識別子と前記識別子読取手段により読取られた物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報に対応する物体が存在することを前記出力装置に出力する通知手段とをさらに備えることができる。
【0010】
ここで、この発明の位置検索装置において、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置とすることができる。
ここで、この発明の位置検索装置において、前記出力装置は音声を用いて情報を出力する発話装置とすることができる。
【0011】
ここで、この発明の位置検索装置において、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置検索装置において、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なるものとすることができる。
ここで、この発明の位置検索装置において、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置検索装置において、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることができる。
ここで、この発明の位置検索装置において、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることができる。
【0012】
この発明の位置検索システムは、位置情報を取得する位置取得装置と、該位置取得装置とネットワークを介して接続されたサーバとを用いて物体の現在位置を検索する位置検索システムであって、前記位置取得装置は、該位置取得装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置取得装置との間の距離を所定の方式に基づいて測定し、該位置取得装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、情報を送受信する通信装置と、前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段と、前記検索開始指示情報に基づき、前記位置センサを用いて前記位置取得装置の位置情報を算出する装置位置算出手段と、前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により算出された前記位置取得装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段と、前記装置位置算出手段により算出された前記位置取得装置の位置情報と、前記測定手段により測定された前記地点と該位置取得装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段と、前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報を前記通信装置を介して前記サーバへ送信する送信手段と、前記サーバから前記通信装置を介して受信した物体の現在位置を前記出力装置へ出力する出力手段とを備え、前記サーバは、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部と、前記送信手段により送信された前記地点の位置情報及び前記時期情報に照合する履歴を前記存在位置履歴記録部から検索する検索手段と、前記検索手段により検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記位置取得装置へ送信する現在位置送信手段とを備えたことを特徴とする。
【0013】
ここで、この発明の位置検索システムにおいて、前記位置取得装置は物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器をさらに備え、前記サーバは該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部をさらに備えており、前記サーバは、前記検索手段により照合する履歴が検索されなかった場合、前記物体情報記録部に記録された各物体の製品情報を前記位置取得装置へ送信する製品情報送信手段と、前記位置取得装置から送信された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得する識別子取得手段と、前記識別子取得手段により取得された識別子と前記位置取得装置から送信された物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記位置取得装置から送信された物体の製品情報に対応する物体が存在することの通知情報を該位置検索装置に送信する通知情報送信手段とをさらに備え、前記位置取得装置は、前記製品情報送信手段により送信された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報を前記サーバへ送信する入力製品情報送信手段と、前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、前記識別子読取手段により読取られた物体の識別子を前記サーバへ送信する識別子送信手段と、前記通知情報送信手段により送信された通知情報を前記出力装置に出力する通知手段とをさらに備えることができる。
【0014】
ここで、この発明の位置検索システムにおいて、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であるものとすることができる。
ここで、この発明の位置検索システムにおいて、前記出力装置は音声を用いて情報を出力する発話装置であるものとすることができる。
【0015】
ここで、この発明の位置検索システムにおいて、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置検索システムにおいて、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なるものとすることができる。
ここで、この発明の位置検索システムにおいて、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置検索システムにおいて、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることができる。
ここで、この発明の位置検索システムにおいて、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることができる。
【0016】
この発明の位置取得装置は、物体の現在位置を検索する位置検索システムにおける該物体の位置情報を取得する位置取得装置であって、該位置取得装置はネットワークを介してサーバと接続されており、前記位置取得装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置取得装置との間の距離を所定の方式に基づいて測定し、該位置取得装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、該ネットワークを介して該サーバと情報を送受信する通信装置と、前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段と、前記検索開始指示情報に基づき、前記位置センサを用いて前記位置取得装置の位置情報を算出する装置位置算出手段と、前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により算出された前記位置取得装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段と、前記装置位置算出手段により算出された前記位置取得装置の位置情報と、前記測定手段により測定された前記地点と該位置取得装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段と、前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報を前記通信装置を介して前記サーバへ送信する送信手段と、前記サーバから前記通信装置を介して受信した物体の現在位置であって、前記サーバが、前記送信手段により送信された前記地点の位置情報及び前記時期情報に照合する履歴を物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部から検索し、検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記位置取得装置へ送信したものを、前記出力装置へ出力する出力手段とを備えたことを特徴とする。
【0017】
ここで、この発明の位置取得装置において、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器をさらに備え、前記サーバは該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部をさらに備えており、前記サーバが前記検索手段により照合する履歴が検索されなかった場合に前記位置取得装置へ送信する前記物体情報記録部に記録された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報を前記サーバへ送信する入力製品情報送信手段と、前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、前記識別子読取手段により読取られた物体の識別子を前記サーバへ送信する識別子送信手段と、前記サーバが、前記入力製品情報送信手段により送信された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得し、取得された識別子と前記識別子送信手段により送信された物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記入力製品情報送信手段により送信された物体の製品情報に対応する物体が存在することの通知情報であって該位置検索装置に送信したものを前記出力装置に出力する通知手段とをさらに備えることができる。
【0018】
ここで、この発明の位置取得装置において、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であるものとすることができる。
ここで、この発明の位置取得装置において、前記出力装置は音声を用いて情報を出力する発話装置であるものとすることができる。
【0019】
ここで、この発明の位置取得装置において、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置取得装置において、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なるものとすることができる。
ここで、この発明の位置取得装置において、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置取得装置において、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることができる。
ここで、この発明の位置取得装置において、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることができる。
【0020】
この発明の位置検索方法は、位置情報を取得する位置取得装置と、該位置取得装置とネットワークを介して接続されたサーバとを用いて物体の現在位置を検索する位置検索方法であって、前記位置取得装置は、該位置取得装置の位置情報を取得する位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置取得装置との間の距離を所定の方式に基づいて測定し、該位置取得装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、該ネットワークを介して該サーバと情報を送受信する通信装置とを備え、前記サーバは、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した前記存在位置履歴記録部を備えており、前記位置検索方法は、前記位置取得装置が、前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射ステップと、前記検索開始指示情報に基づき、前記位置センサを用いて前記位置検索装置の位置情報を算出する装置位置算出ステップと、前記測定装置に、前記光線放射ステップで前記照射光源から放射された光線が指示する地点と前記装置位置算出ステップで算出された前記位置取得装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定ステップと、前記装置位置算出ステップで算出された前記位置取得装置の位置情報と、前記測定ステップで測定された前記地点と該位置取得装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得ステップと、前記地点位置取得ステップで求められた前記地点の位置情報及び前記入力装置から入力された時期情報を前記通信装置を介して前記サーバへ送信する送信ステップと、前記サーバが、前記送信ステップで送信された前記地点の位置情報及び前記時期情報に照合する履歴を前記存在位置履歴記録部から検索する検索ステップと、前記検索ステップで検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記位置取得装置へ送信する現在位置送信ステップと、前記位置取得装置が、前記現在位置送信ステップでサーバから送信され前記通信装置を介して受信した物体の現在位置を前記出力装置へ出力する出力ステップとを備えたことを特徴とする。
【0021】
ここで、この発明の位置検索方法において、前記位置取得装置は物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器をさらに備え、前記サーバは該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部をさらに備えており、前記サーバが、前記検索ステップで照合する履歴が検索されなかった場合、前記物体情報記録部に記録された各物体の製品情報を前記位置取得装置へ送信する製品情報送信ステップと、前記位置取得装置が、前記製品情報送信ステップで送信された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力ステップと、前記製品情報出力ステップにおける促しに基づいて前記入力装置を用いて選択された物体の製品情報を前記サーバへ送信する入力製品情報送信ステップと、前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取ステップと、前記識別子読取ステップで読取られた物体の識別子を前記サーバへ送信する識別子送信ステップと、前記サーバが、前記入力製品情報送信ステップで送信された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得する識別子取得ステップと、前記識別子取得ステップで取得された識別子と前記識別子送信ステップで送信された物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記位置取得装置から送信された物体の製品情報に対応する物体が存在することの通知情報を該位置検索装置に送信する通知情報送信ステップと、前記位置取得装置が、前記通知情報送信ステップで送信された通知情報を前記出力装置に出力する通知ステップとをさらに備えることができる。
【0022】
ここで、この発明の位置検索方法において、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であるものとすることができる。
ここで、この発明の位置検索方法において、前記出力装置は音声を用いて情報を出力する発話装置であるものとすることができる。
【0023】
ここで、この発明の位置検索方法において、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置検索方法において、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なるものとすることができる。
ここで、この発明の位置検索方法において、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置検索方法において、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることができる。
ここで、この発明の位置検索方法において、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることができる。
【0024】
この発明の位置収集装置は、物体の現在位置を収集する位置収集装置であって、該位置収集装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された物体と該位置収集装置との間の距離を所定の方式に基づいて測定し、該位置検索装置から該物体への仰角及び所定の基準方角から該物体の方角への方位角を測定する測定装置と、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器と、現在時刻を計時するタイマと、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に前記識別子を用いて記録した存在位置履歴記録部とを備え、前記照射光源に光線を放射させる光線放射手段と、前記位置センサを用いて前記位置収集装置の位置情報を算出する装置位置算出手段と、前記測定装置に前記光線放射手段により前記照射光源から放射された光線が指示する物体と前記装置位置算出手段により算出された前記位置収集装置の位置との間の距離、該位置から該物体への仰角及び所定の基準方角から該物体の方角への方位角を測定させる測定手段と、前記装置位置算出手段により算出された前記位置収集装置の位置情報と、前記測定手段により測定された前記物体と該位置収集装置の前記位置との間の距離、前記位置から前記物体への仰角及び所定の基準方角から前記物体の方角への方位角とに基づき、該物体の位置情報を求める物体位置取得手段と、前記物体に付された無線自動識別タグから該物体の識別子を前記無線自動識別タグ読取器に読取らせる識別子読取手段と、前記識別子読取手段により読取られた前記物体の識別子に照合する識別子を前記存在位置履歴記録部から検索し、照合した識別子に対応する履歴を取得する履歴取得手段と、前記物体位置取得手段により求められた該物体の位置情報及び前記タイマにより計時された現在時刻に基づく時期情報を用いて、前記履歴取得手段により取得された前記履歴を更新する更新手段とをさらに備えたことを特徴とする。
【0025】
ここで、この発明の位置収集装置において、前記履歴取得手段により前記物体の識別子に照合する識別子が検索されなかった場合、前記識別子を用いて、前記物体位置取得手段により求められた該物体の位置情報及び前記タイマにより計時された現在時刻に基づく時期情報を前記物体の履歴として前記存在位置履歴記録部に追加する追加手段をさらに備えることができる。
【0026】
ここで、この発明の位置収集装置において、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置収集装置において、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なるものとすることができる。
ここで、この発明の位置収集装置において、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置収集装置において、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることができる。
ここで、この発明の位置収集装置において、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることができる。
【0027】
この発明の位置収集方法は、本発明のいずれかの位置収集装置を用いて物体の位置を収集することを特徴とする。
【0028】
この発明のプログラムは、物体の現在位置を位置検索装置を用いて検索するためのプログラムであって、該位置検索装置は、該位置検索装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置検索装置との間の距離を所定の方式に基づいて測定し、該位置検索装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部とを備えており、前記位置検索装置のコンピュータを、前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段、前記検索開始指示情報に基づき、前記位置センサを用いて前記位置検索装置の位置情報を算出する装置位置算出手段、前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により算出された前記位置検索装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段、前記装置位置算出手段により算出された前記位置検索装置の位置情報と、前記測定手段により測定された前記地点と該位置検索装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段、前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報に照合する履歴を前記存在位置履歴記録部から検索する検索手段、前記検索手段により検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記出力装置へ出力する出力手段として機能させるためのプログラムである。
【0029】
ここで、この発明のプログラムにおいて、前記位置検索装置は、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器と、該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部とをさらに備え、前記検索手段により照合する履歴が検索されなかった場合、前記物体情報記録部に記録された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得する識別子取得手段と、前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、前記識別子取得手段により取得された識別子と前記識別子読取手段により読取られた物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報に対応する物体が存在することを前記出力装置に出力する通知手段とをさらに備えることができる。
【0030】
この発明のプログラムは、物体の現在位置を検索する位置検索システムにおける該物体の位置情報を取得する位置取得装置で実行されるためのプログラムであって、該位置取得装置はネットワークを介してサーバと接続され、該位置取得装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置取得装置との間の距離を所定の方式に基づいて測定し、該位置検索装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、情報を送受信する通信装置とを有しており、該位置検索装置のコンピュータを、前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段、前記検索開始指示情報に基づき、前記位置センサを用いて前記位置取得装置の位置情報を算出する装置位置算出手段、前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により算出された前記位置取得装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段、前記装置位置算出手段により算出された前記位置取得装置の位置情報と、前記測定手段により測定された前記地点と該位置取得装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段、前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報を前記通信装置を介して前記サーバへ送信する送信手段、前記サーバから前記通信装置を介して受信した物体の現在位置であって、前記サーバが、前記送信手段により送信された前記地点の位置情報及び前記時期情報に照合する履歴を物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部から検索し、検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記位置取得装置へ送信したものを、前記出力装置へ出力する出力手段として機能させるためのプログラムである。
【0031】
ここで、この発明のプログラムにおいて、前記位置取得装置は前記物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器をさらに備え、前記サーバは該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部をさらに備えており、前記サーバが前記検索手段により照合する履歴が検索されなかった場合に前記位置取得装置へ送信する前記物体情報記録部に記録された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報を前記サーバへ送信する入力製品情報送信手段と、前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、前記識別子読取手段により読取られた物体の識別子を前記サーバへ送信する識別子送信手段と、前記サーバが、前記入力製品情報送信手段により送信された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得し、取得された識別子と前記識別子送信手段により送信された物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記入力製品情報送信手段により送信された物体の製品情報に対応する物体が存在することの通知情報であって該位置検索装置に送信したものを前記出力装置に出力する通知手段とをさらに備えることができる。
【0032】
ここで、この発明のプログラムにおいて、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であるものとすることができる。
ここで、この発明のプログラムにおいて、前記出力装置は音声を用いて情報を出力する発話装置であるものとすることができる。
【0033】
この発明のプログラムは、物体の現在位置を位置収集装置に収集させるためのプログラムであって、該位置収集装置は、該位置収集装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された物体と該位置収集装置との間の距離を所定の方式に基づいて測定し、該位置収集装置から該物体への仰角及び所定の基準方角から該物体の方角への方位角を測定する測定装置と、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器と、現在時刻を計時するタイマと、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に前記識別子を用いて記録した存在位置履歴記録部とを有しており、該位置収集装置のコンピュータを、前記照射光源に光線を放射させる光線放射手段、前記位置センサを用いて前記位置収集装置の位置情報を算出する装置位置算出手段、前記測定装置に前記光線放射手段により前記照射光源から放射された光線が指示する物体と前記装置位置算出手段により算出された前記位置収集装置の位置との間の距離、該位置から該物体への仰角及び所定の基準方角から該物体の方角への方位角を測定させる測定手段、前記装置位置算出手段により算出された前記位置収集装置の位置情報と、前記測定手段により測定された前記物体と該位置収集装置の前記位置との間の距離、前記位置から前記物体への仰角及び所定の基準方角から前記物体の方角への方位角とに基づき、該物体の位置情報を求める物体位置取得手段、前記物体に付された無線自動識別タグから該物体の識別子を前記無線自動識別タグ読取器に読取らせる識別子読取手段、前記識別子読取手段により読取られた前記物体の識別子に照合する識別子を前記存在位置履歴記録部から検索し、照合した識別子に対応する履歴を取得する履歴取得手段、前記物体位置取得手段により求められた該物体の位置情報及び前記タイマにより計時された現在時刻に基づく時期情報を用いて、前記履歴取得手段により取得された前記履歴を更新する更新手段として機能させるためのプログラムである。
【0034】
ここで、この発明のプログラムにおいて、前記履歴取得手段により前記物体の識別子に照合する識別子が検索されなかった場合、前記識別子を用いて、前記物体位置取得手段により求められた該物体の位置情報及び前記タイマにより計時された現在時刻に基づく時期情報を前記物体の履歴として前記存在位置履歴記録部に追加する追加手段をさらに備えることができる。
【0035】
ここで、この発明のプログラムにおいて、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることができる。
【0036】
ここで、この発明のプログラムにおいて、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なるものとすることができる。
ここで、この発明のプログラムにおいて、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることができる。
ここで、この発明のプログラムにおいて、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることができる。
ここで、この発明のプログラムにおいて、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることができる。
【0037】
この発明の記録媒体は、本発明のいずれかに記載のプログラムを記録したコンピュータ読取り可能な記録媒体である。
【発明の効果】
【0038】
本発明の位置検索システム等によれば、過去に物体が存在していたと思われる地点へ位置検索装置を向け、入力装置を押下することにより物体の現在位置の検索開始指示情報が入力される。当該検索開始指示情報の入力に基づき、光線放射部が照射光源に光線を放射させて上記地点を指示し、装置位置算出部が位置センサを用いて位置検索装置の位置情報を算出する。上記検索開始指示情報の入力に基づき、測定部が測定装置に対し、上記地点と上記位置情報により示される位置との間の距離および高度差を測定させる。地点位置取得部は、上記位置情報と距離と高度差とに基づき、上記地点の位置情報を求める。検索部は、上記地点の位置情報および入力された時期情報に照合する履歴を存在位置履歴記録部から検索する。出力部は、検索された履歴中で最新の時期情報に対応する位置情報を当該履歴に対応する物体の現在位置として出力装置へ出力する。この結果、ユーザにとって簡易に使用することができ、製品(物体)がいつどこに置かれていたかを覚えているが(すなわち時期情報と上記地点とを得られるが)、その製品名を正確に思い出せない場合であっても使用することができる製品の位置検索装置等を提供することができるという効果がある。
【発明を実施するための最良の形態】
【0039】
以下、各実施例について図面を参照して詳細に説明する。
【実施例1】
【0040】
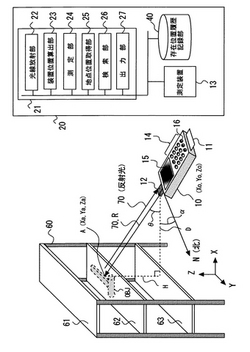
図1は、本発明の実施例1における位置検索装置10を説明するための図である。図1において、符号10は物体OBJの現在位置を検索する位置検索装置、20は位置検索装置10の内部装置および機能等を示す内部構成であり、21は位置検索装置10のコンピュータが実行する機能を示す機能ブロックである。符号60は上段61、中段62および下段63を有する収納棚であり、中段62上に点線で薄く示された物体OBJは物体OBJが過去に中段62上に存在していたことを示す。収納棚60の有する段数は3段に限定されるものではない。図1に示されるようなX、YおよびZの3次元座標系を用いて、位置検索装置10の位置の3次元座標は(Xo、Yo、Zo)、物体OBJの(過去の)地点(位置A)(以下、「地点A」と略す。)の3次元座標は(Xa、Ya、Za)と示す。緯度および経度を用いて、位置検索装置10の位置の(緯度、経度)を(LAo、LOo)、物体OBJの(過去の)地点Aの(緯度、経度)を(LAa、LOa)と示すこともできる。
【0041】
図1において、符号11は位置検索装置10の位置情報を取得する位置センサである。位置センサ11としては例えば位置検索装置10の位置を測位するためのGPS(Global Positioning System)アンテナを用いることができる。あるいは位置センサ11としてUWB(Ultra Wide Band)アンテナを用いてもよい。UWB無線方式は、マイクロ波帯(3GHz〜30GHz)からミリ波帯(30GHz〜300GHz)に至る広帯域な周波数帯を使用し、1nsec以下のパルスを変調せずに送信する方式であり、距離分解能が非常に高い。いずれの場合も位置情報は地球上の位置の3次元座標(X、Y、Z)および/または(緯度、経度)とするが、以下では便宜上、3次元座標のみで説明する場合もある。
【0042】
符号12は光線70を放射する照射光源であり、図1に示されるように光線70により物体OBJの過去の地点A(3次元座標(Xa、Ya、Za))がポイント(指示)され、人間が地点Aを視認することができるようになっている。照射光源12から放射された光線70により指示された地点Aと位置検索装置10との間の距離(直線距離または斜距離)Rは種々の方式(所定の方式)に基づいて測定することができる。例えば、照射光源12から放射される光線70がレーザ光線である場合、所定の方式として当該レーザ光線70を利用することができる。照射光源12から放射されたレーザ光線70は地点Aをポイントして人間が視認できるようにすると共に、地点Aで反射して照射光源12の近傍に設けられた検知器(不図示)により検知される。レーザ光線70の往復時間を内蔵するクロック(不図示)で計測し、この往復時間(秒)とレーザ光線70の速度(m/秒)との積を2で割ることにより、照射光源12から放射されたレーザ光線70により指示された地点Aと位置検索装置10との間の距離(直線距離または斜距離)Rを測定することができる。
上述の距離Rを測定するための所定の方式として、照射光源12から放射される光線70を利用しない方式を用いることもできる。この場合、照射光源12から放射される光線70はポイントされた地点Aを人間が視認するためにのみ用いることになる。照射光源12が放射する光線70は所定値以下の細さのビームであってレーザ光線とは異なるものを用いればよい。例えば照射光源12として、豆球にニップル球等を用いたいわゆるポインタ型の光源を用いることができる。距離Rを測定する所定の方式として、測定装置10にレーザ光線を放射するレーザ光源(不図示)を別途設けておき、当該レーザ光源から放射されるレーザ光線を上述と同様に利用する方式を用いることができる。
距離Rを測定する所定の方式として、測定装置10に所定の音波を放射する音波源(不図示)を別途設けておき、当該音波源から放射される所定の音波を利用する方式を用いることもできる。この場合、いわゆるアクティブ・ソナー(能動型音波探知機)のように、当該音波源から所定の音波70(便宜的に光線70と同じ符号を用いる。)を放射し、地点Aで反響して戻ってきた音波を聴音装置(不図示)により受信する。音波70の往復時間を内蔵するクロックで計測し、この往復時間(秒)と音波70の速度(m/秒)との積を2で割ることにより、距離Rを求めることができる。所定の音波70としては超音波を用いることができるが、超音波は空中では水中と異なり伝播減衰が大きいため、20KHz〜200KHzの周波数帯を用いることが好適である。
距離Rを測定する所定の方式として、測定装置10に所定の電波を放射する電波源(不図示)を別途設けておき、当該電波源から放射される所定の電波を利用する方式を用いることもできる。この場合、電波を使用したいわゆるレベル計のように、当該電波源から所定の電波70(便宜的に光線70と同じ符号を用いる。)を放射し、地点Aで反射して戻ってきた電波70を受信装置(不図示)により受信する。電波70の往復時間を内蔵するクロックで計測し、この往復時間(秒)と電波70の速度(m/秒)との積を2で割ることにより、距離Rを求めることができる。所定の電波70としてはミリ波を用いることが好適であり、周波数変調連続(Frequency Modulated Continuous Wave : FMCW)方式の変調を用いたいわゆるFMCW方式ミリ波レーダと同様にして距離Rを求めることができる。マイクロ波を用いたFMCW方式レーダを用いてもよい。
測定装置13は傾斜計(例えば電気式傾斜計等)とコンパス(地磁気センサ)とを内蔵した通常のレーザ距離計を用いることにより、位置検索装置10から地点Aへの仰角θと所定の基準方角N(例えば真北の方角)から地点Aの方角への方位角αを測定することができる。仰角θは傾斜計の替わりにジャイロを用いて測定してもよい。方位角αは、ホール効果または磁気抵抗効果を応用した半導体素子を地磁気センサとして用いることにより測定することができる。光ファイバを用いた磁気検出器を利用してもよい。この場合、メタルコートされた光ファイバをコイル形状にしたセンシングコイルに交流電流を流すと、電流と地磁気による磁束密度とにより生じるローレンツ力によって光ファイバが伸縮する。この結果、別途用意した参照用の光ファイバコイルを通る光と上記センシングコイルを通る光との間で位相にずれが生じるため、両コイルからの光を合波した出力光強度が変化する。従って、この出力光強度をモニターすることにより地磁気を検出することができる。地磁気の検出は上述の地磁気センサのように絶対方位を求めるタイプのものではなく、ジャイロのように相対的な方位を求めるタイプのものを利用してもよい。以上により、距離R、仰角θおよび方位角αを測定することができる。距離Rと仰角θとから高度差Hおよび水平距離Dを得ることができる。
【0043】
符号14および16は情報を入力するテンキー等の入力装置である(後述の図6参照)。特に入力装置16は照射光源12から光線70を照射するための指示ボタン(ポインタ・ボタン)として用いることができる。符号15は情報を出力する液晶ディスプレイ等の出力装置である。出力装置15をタッチパネルとし、入力装置14等として用いることもできる。
【0044】
内部構成20内に示される存在位置履歴記録部40は、物体OBJの位置情報(Xa、Ya、Za)および物体OBJがその位置情報(Xa、Ya、Za)により示される地点Aに存在した時期情報の履歴を物体毎に記録している。時期情報の形式は例えば西暦年をyyyyとし、月をmmとし、日をddとすると、(yyyy.mm.dd)のように表すことができる。例えば、2004年5月10日であれば(2004.05.10)のように表すことができる。
【0045】
次に、位置検索装置10のコンピュータが実行する機能について説明する。機能ブロック21内に示されるように、光線放射部(光線放射手段)22は、入力装置16等から入力された物体OBJの現在位置の検索開始指示情報に基づき、照射光源12に光線70を放射させる。装置位置算出部(装置位置算出手段)23は、上記検索開始指示情報に基づき、位置センサ11を用いて位置検索装置10の位置情報(Xo、Yo、Zo)を算出する。位置センサ11としてGPSアンテナを用いる場合、3次元座標(Xo、Yo、Zo)を得るためにはGPSにおける4個の衛星からの受信が必要となるが、3個の衛星からの受信しか得られない場合は、高度Zoを含まない2次元座標(Xo、Yo)となる。このような場合には予め位置検索装置10を人間が所定の高度(例えば1m)に持って使用するものと想定し、3次元座標(Xo、Yo、1m)とすればよい。位置センサ11としてUWBアンテナを用いる場合、収納棚60が設置された室内等に設けられた3つのUWB基地局と位置検索装置10との間でUWB通信を行って各基地局との間の距離を算出することにより、位置検索装置10の位置情報として3次元座標(Xo、Yo、Zo)を特定することができる。
【0046】
測定部(測定手段)24は、上記検索開始指示情報に基づき、測定装置13に対し、光線放射部22により照射光源12から放射された光線70が指示する地点Aと装置位置算出部23により算出された位置検索装置10の位置情報(Xo、Yo、Zo)により示される位置との間の距離R、当該位置情報(Xo、Yo、Zo)により示される位置から地点Aへの仰角θおよび所定の基準方角N(例えば真北)から地点Aへの方位角αを測定させる。地点位置取得部(地点位置取得手段)25は、装置位置算出部23により算出された位置検索装置10の位置情報(Xo、Yo、Zo)と、測定部24により測定された地点Aと位置検索装置10の位置との間の距離R、当該位置情報(Xo、Yo、Zo)により示される位置から地点Aへの仰角θおよび所定の基準方角N(例えば真北)から地点Aへの方位角αとに基づき、地点Aの位置情報(Xa、Ya、Za)を求める。ZaはZoと高度差Hとを用い、XaおよびYaは(Xo、Yo)または(緯度LAo、経度LOo)と基準方角N(例えば真北)から地点Aへの方位角αおよび水平距離Dとを用いることにより求めることができる。例えば、(Xa、Ya、Za)=(Xo−D、Yo、Zo+H)となる。検索部(検索手段)26は、地点位置取得部25により求められた地点Aの位置情報(Xa、Ya、Za)および入力装置14から入力された時期情報に照合する履歴を存在位置履歴記録部40から検索する。時期情報の入力は、例えば2004年5月10日であればテンキー等の入力装置14から「2,0,0,4,0,5,1,0」と入力すればよい。検索についての具体例は後述する。出力部(出力手段)27は、検索部26により検索された履歴中で最新の時期情報に対応する位置情報(X、Y、Z)を当該履歴に対応する物体OBJの現在位置として出力装置15へ出力する。
【0047】
図2(A)は本発明の実施例1における存在位置履歴記録部40の構成例を示す。図2(A)に示されるように、存在位置履歴記録部40は物体を識別可能な識別子(物体ID)を有する物体ID欄41と、物体ID欄41により示される物体IDを有する物体の位置情報および時期情報の履歴を有する履歴欄42とを有する表構造により実現することができる。ある時点tにおける位置情報および時期情報を各々位置情報tおよび時期情報tとすると、履歴は例えば((位置情報t、時期情報t)、(位置情報t−1、時期情報t−1)、...、(位置情報t−n、時期情報t−n))のようなリスト構造により実現することができる。あるいは後入れ先出しのスタック構造であってもよい。例えば図2(A)に示されるように、物体ID欄41がHMR−01の行40aでは履歴欄42は(((X1、Y1、Z1)、(2004.05.10))、((X2、Y2、Z2)、(2004.04.30)))のようになる。これは、物体IDがHMR−01である物体は、2004年4月30日に位置情報(X2、Y2、Z2)で示される位置にいたが、2004年5月10日には位置情報(X1、Y1、Z1)で示される位置に移動したことを示す。物体ID欄41がHMR−02の行40bでは履歴欄42は(((X3、Y3、Z3)、(2004.03.10)))のようになる。これは、物体IDがHMR−02である物体は、2004年3月10日に位置情報(X3、Y3、Z3)で示される位置にいたことを示す。物体ID欄41がPIN−03の行40mでは履歴欄42は(((X4、Y4、Z4)、(2004.04.15))、((X5、Y5、Z5)、(2004.03.15)))のようになる。これは、物体IDがPIN−03である物体は、2004年3月15日に位置情報(X5、Y5、Z5)で示される位置にいたが、2004年4月15日には位置情報(X4、Y4、Z4)で示される位置に移動したことを示す。上述の説明では履歴欄42の履歴中で最新の時期情報tほどリスト中の先頭に記録した。これは履歴が通常のリスト構造または後入れ先出しのスタック構造であるため、出力部27が最新の時期情報を効率よく取り出すことができるようにしたためである。従って、履歴を別の構造、例えば配列構造とした場合は、最新の時期情報ほど(配列の添字上)後の方に記録してもよい。
【0048】
上述の説明では位置情報を3次元座標(X、Y、Z)により表した。しかし、出力部27が位置情報(X、Y、Z)をそのまま物体OBJの現在位置として出力装置15へ出力した場合、位置検索装置10を使用するユーザにとって当該現在位置は直感的には理解しにくいものと考えられる。このため、位置情報(X、Y、Z)をユーザにとって直感的に理解しやすい位置名称へ変換した後、当該位置名称を位置情報(X、Y、Z)と共に出力してもよい。あるいは当該位置名称を位置情報として扱って当該位置名称のみを出力することもできる。図2(B)は位置情報と位置名称との変換テーブル45を示す。変換テーブル45は存在位置履歴記録部40と同じ記録装置上に設けておくことができる。図2(B)に示されるように、変換テーブル45は位置情報欄46と対応する位置の名称を示す位置名称欄47とを有する表構造により実現することができる。例えば、位置情報欄46が(X1、Y1、Z1)の行45aでは、位置名称欄47は「工具箱の中」となる。位置情報欄46が(X2、Y2、Z2)の行45bでは、位置名称欄47は「収納棚の上から2段目(または中段)中央」となり、位置情報欄46が(X4、Y4、Z4)の行45jでは、位置名称欄47は「作業机の引出の中」となり、位置情報欄46が(X5、Y5、Z5)の行45kでは、位置名称欄47は「作業机の上中央」となる。変換テーブル45を用いることにより、出力部27は位置情報(X1、Y1、Z1)等をそのまま物体OBJの現在位置として出力装置15へ出力せずに、位置情報(X1、Y1、Z1)と共に「工具箱の中」を出力したり、あるいは「工具箱の中」のみを出力することができる。
【0049】
図3は、本発明の実施例1における位置検索装置10のコンピュータが実行するプログラムの流れをフローチャートで示す。以下では説明の便宜上、物体OBJの地点を位置Pとし、地点(位置P)(以下、単に「地点P」という。)の3次元座標を(X2、Y2、Z2)とし、入力装置14から入力される時期情報を(2004.04.30)とする。図3に示されるように、まず、入力装置16等から物体OBJの現在位置の検索開始指示情報が入力されると(ステップS10)、光線放射部22は照射光源12に光線70を放射させる(ステップS12)。次に、装置位置算出部23は上記検索開始指示情報に基づき、位置センサ11を用いて位置検索装置10の位置情報(Xo、Yo、Zo)を算出する(ステップS14)。以上のステップS12およびS14は、ステップS10で検索開始指示情報が入力され次第、並行して実行することもできる。続いて、測定部24は測定装置13に対し、光線放射部22により照射光源12から放射された光線70が指示する地点Pと装置位置算出部23により算出された位置検索装置10の位置情報(Xo、Yo、Zo)により示される位置との間の距離R、当該位置情報(Xo、Yo、Zo)により示される位置から地点Pへの仰角θおよび所定の基準方角N(例えば真北)から地点Pへの方位角αを測定させる(ステップS16)。
【0050】
地点位置取得部25は、装置位置算出部23により算出された位置検索装置10の位置情報(Xo、Yo、Zo)と、測定部24により測定された地点Pと位置検索装置10の位置との間の距離R、当該位置情報(Xo、Yo、Zo)により示される位置から地点Pへの仰角θおよび所定の基準方角N(例えば真北)から地点Pへの方位角αとに基づき、地点Pの位置情報(X2、Y2、Z2)を求める(ステップS18)。検索部26は、地点位置取得部25により求められた地点Pの位置情報(X2、Y2、Z2)およびテンキー等の入力装置14等から入力された時期情報(2004.04.30)に照合する履歴を存在位置履歴記録部40から検索する(ステップS20)。具体的には、検索部26は存在位置履歴記録部40の履歴欄42中で((X2、Y2、Z2)、(2004.04.30))に照合する履歴を検索し、行40a中の履歴欄42の内容(((X1、Y1、Z1)、(2004.05.10))、((X2、Y2、Z2)、(2004.04.30)))を得る。出力部27は、検索部26により検索された履歴中で最新の時期情報に対応する位置情報(X、Y、Z)を当該履歴に対応する物体OBJの現在位置として出力装置15へ出力する(ステップ22)。具体的には、出力部27は検索部26により検索された履歴(((X1、Y1、Z1)、(2004.05.10))、((X2、Y2、Z2)、(2004.04.30)))中で最新の時期情報(2004.05.10)に対応する位置情報(X1、Y1、Z1)を当該履歴に対応する物体(物体ID=HMR−01)の現在位置として出力装置15へ出力する。この際、上述のように出力装置15に位置情報(X1、Y1、Z1)だけではなく、変換テーブル45を用いて変換された位置名称欄47の内容「工具箱の中」と共に出力することができる。さらに、過去の位置情報(X2、Y2、Z2)および時期情報(2004.04.30)も合わせて出力してもよい。例えば、「物体OBJ(物体ID=HMR−01)は2004年4月30日(過去の時期情報(2004.04.30))には収納棚の上から2段目中央(過去の位置情報(X2、Y2、Z2))にあったが、2004年5月10日(最新の時期情報(2004.05.10))には工具箱の中(最新の位置情報(X1、Y1、Z1))にある。」等のように出力することもできる。物体IDと物体名称とを対応付けた別の変換テーブル(後述の図5参照)を用いて、「物体OBJ(物体ID=HMR−01)は...」と出力する替わりに「木槌(大)(物体ID=HMR−01)は...」と出力させてもよい。
【0051】
以上より、本発明の実施例1によれば、位置検索装置10を過去に物体OBJ(例:物体ID=HMR−01)が存在していたと思われる位置(例:地点P)へ向け、入力装置16等を押下することにより、物体OBJの現在位置の検索開始指示情報が入力される。当該検索開始指示情報の入力に基づき、光線放射部22が照射光源12に光線70を放射させ、光線70は地点Pを指示し、装置位置算出部23が位置センサ11を用いて位置検索装置10の位置情報(Xo、Yo、Zo)を算出する。上記検索開始指示情報の入力に基づき、測定部24が測定装置13に対し、光線放射部22により照射光源12から放射された光線70が指示する地点Pと装置位置算出部23により算出された位置検索装置10の位置情報(Xo、Yo、Zo)により示される位置との間の距離R、当該位置情報(Xo、Yo、Zo)により示される位置から地点Pへの仰角θおよび所定の基準方角N(例えば真北)から地点Pへの方位角αを測定させる。地点位置取得部25は、装置位置算出部23により算出された位置検索装置10の位置情報(Xo、Yo、Zo)と、測定部24により測定された地点Pと位置検索装置10の位置との間の距離R、当該位置情報(Xo、Yo、Zo)により示される位置から地点Pへの仰角θおよび所定の基準方角N(例えば真北)から地点Pへの方位角αとに基づき、地点Pの位置情報(X2、Y2、Z2)を求める。検索部26は、地点位置取得部25により求められた地点Pの位置情報(X2、Y2、Z2)および入力装置14等のテンキーから入力された時期情報(2004.04.30)に照合する履歴を存在位置履歴記録部40から検索する。出力部27は、検索部26により検索された履歴中で最新の時期情報に対応する位置情報(X、Y、Z)を当該履歴に対応する物体OBJの現在位置として出力装置15へ出力する。この結果、位置検索装置10を物体OBJが過去に存在していたと思われる地点へ向けて入力装置16等を押下し、物体OBJが当該地点に存在していたと思われる時期情報を入力装置14等から入力するだけで、物体OBJが現在存在している地点の位置情報を位置検索装置10の出力装置15に出力させることができる。従って、ユーザにとって簡易に使用することができ、製品(物体OBJ)がいつどこに置かれていたかを覚えているがその製品名を正確に思い出せない場合であっても使用することができる製品の位置検索装置10等を提供することができる。
【実施例2】
【0052】
実施例1では、検索部26が地点位置取得部25により求められた地点の位置情報および入力装置14から入力された時期情報に照合する履歴を存在位置履歴記録部40から検索できた場合について説明した。本実施例2では、検索部26により照合する履歴が検索されなかった場合、すなわち存在位置履歴記録部40の履歴欄42の内容に上記位置情報および上記時期情報がなかった場合の処理について説明する。
【0053】
検索部26により照合する履歴が検索された場合は、当該履歴に対応する物体ID欄41の物体IDを得ることができる。しかし、照合する履歴が検索されなかった場合は物体IDを得ることができず、ユーザは探そうとしている製品(物体)の名称を元々正確に思い出せない状態である。そこで、実施例2では位置検索装置10側が記録している物体に関する情報をユーザ側へ提供し、ユーザ側にそれらの情報から探そうとしている製品を選択させ、当該選択に基づき物体IDを取得し、位置検索装置10に新たに設けられたRFIDリーダを用いて当該物体IDに等しいRFIDタグを付けている物体を探すという処理を行う。この結果、ユーザは探そうとしている製品の位置を知ることができる。
【0054】
図4は、本発明の実施例2における位置検索装置10を説明するための図である。図4で図1と同じ符号を付した箇所は同じ要素または同じ機能を有するため、説明は省略する。図4において、符号65は収納棚60の上段に置かれた物体、66は物体65に付された物体65を識別する識別子が記録されたRFIDタグ、17は位置検索装置10に新たに設けられた、物体65等に付されたRFIDタグ66から物体ID(識別子)を読取るRFIDリーダ、MはRFIDリーダから物体65を指すベクトル、75はRFIDリーダ17とRFIDタグ66との間で伝送される電波、18aおよび18bは位置検索装置10の別の入力装置である。実施例2ではRFIDタグ66を便宜上パッシブ型として説明する。従って、RFIDタグ66はRFIDリーダ17から非接触電力伝送により電波を受け取り、そのエネルギにより送受信を行なう。しかし、RFIDタグ66がアクティブ型であってもよいことは勿論である。
【0055】
次に、実施例2の位置検索装置10の内部構成20および機能ブロック21について説明する。図4に示されるように、実施例2の内部構成20には物体ID(識別子)と当該物体IDに対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部50(詳細は後述)が新たに設けられている。実施例2の機能ブロック21には、検索部26により照合する履歴が検索されなかった場合のために、製品情報出力部(製品情報出力手段)30、識別子取得部(識別子取得手段)31、識別子読取部(識別子読取手段)32および通知部(通知手段)33が新たに設けられている。
【0056】
製品情報出力部30は、物体情報記録部50に記録された各物体の製品情報を出力装置15に出力し、物体の製品情報の選択を促す出力を行なう。識別子取得部31は、製品情報出力部30による促しに基づいて、ユーザにより入力装置14等を用いて選択された物体の製品情報に対応する物体の識別子(物体ID1)を物体情報記録部50から取得する。識別子読取部32は、RFIDリーダ17に、RFIDリーダ17が向けられた方向(ベクトルMの方向)の物体65に付されたRFIDタグ66から物体65の識別子(物体ID2)を読取らせる。通知部33は、識別子取得部31により取得された識別子(物体ID1)と識別子読取部32により読取られた物体の識別子(物体ID2)とが一致する場合、RFIDリーダ17が向けられた方向(ベクトルMの方向)に、製品情報出力部30による促しに基づいてユーザにより入力装置14等を用いて選択された物体の製品情報に対応する物体65が存在することを出力装置15に出力する。この結果、ユーザは探そうとしている製品、すなわち入力装置14等を用いて選択した物体の製品情報に対応する物体の位置は、RFIDリーダ17が向けられた方向(ベクトルMの方向)に存在することを知ることができる。
【0057】
次に、物体情報記録部50の構成例について説明する。図5は、物体情報記録部50の構成例を示す。図5で図2(A)と同じ符号を付した箇所は同じ要素を示すため説明は省略する。図5に示されるように、物体情報記録部50は物体ID欄41と当該物体ID欄41により示される物体の名称を含む物体の製品情報とを記録した表構造により実現することができる。物体の製品情報としては、物体ID欄41により示される物体の名称を示す物体名称欄51と、物体ID欄41により示される物体のシリアル番号(製造番号)を示すシリアル番号欄52と、物体ID欄41により示される物体の製造年月日を示す製造年月日欄53とを有している。例えば、物体ID欄41がHMR−01の行50aでは、対応する物体名称欄51の内容は「木槌(大)」(大型の木槌を示す。)であり、シリアル番号欄52の内容は「ABC005」であり、製造年月日欄53は「2004.01.15」(2004年1月15日製造を示す。)である。同様に、物体ID欄41がHMR−02の行50bでは、対応する物体名称欄51の内容は「木槌(中)」(中型の木槌を示す。)であり、シリアル番号欄52の内容は「ABC009」であり、製造年月日欄53は「2004.02.03」(2004年2月3日製造を示す。)である。物体ID欄41がPIN−03の行50mでは、対応する物体名称欄51の内容は「釘抜き(小」(小型の釘抜きを示す。)であり、シリアル番号欄52の内容は「WXY005」であり、製造年月日欄53は「2003.10.15」(2003年10月15日製造を示す。)である。図5では図面の都合上、物体名称欄51、シリアル番号欄52および製造年月日欄53の3種類のみ示しているが、物体ID欄41により示される物体を同定する上で用いることが可能な製品情報であればさらに他の製品情報(例えば物体の色、形状、購入年月日、購入店等)も付加することができる。例えば物体名称欄51の内容は「木槌」等のみとし、別途形状欄を設けてそこに「大」、「中」、「小」等を記録するようにしてもよい。
【0058】
図6は、本発明の実施例2において、製品情報出力部30が出力装置15に出力する物体情報記録部50に記録された各物体の製品情報の例を示す。図6において、図4と同じ符号を付した箇所は同じ要素を示すため説明は省略する。図6で入力装置14はテンキー等として示されており、上述の時期情報はこのテンキー等を用いて入力することができる。図6に示されるように、製品情報出力部30は出力装置15に物体情報記録部50に記録された各物体の物体名称欄51、シリアル番号欄52および製造年月日欄53の内容を出力(表示)する。その際、「製品を選択して下さい。」という選択を促すメッセージ6の表示を行なう。図6では物体名称欄51が製品名称欄51aとして表示されているが、物体情報記録部50の各名称欄51等は内部的なものであるため、出力装置15に出力する際には適宜別の名称として表示してもよい。出力装置15に表示された第1行目は物体情報記録部50の行50aに相当し、第2行目は行50bに相当する。製品名欄51aの第2行目「木槌(中)」は反転表示されており、これはユーザによる選択に用いられるカーソル8が置かれている状態を示す。入力装置18aを上下に押下することにより、カーソル8を出力装置15に表示された製品名称欄51a等の各欄の上下に移動させることができる。さらに入力装置18bを左右に押下することにより、カーソル8を出力装置15に表示された行50a等の各行の左右に移動させることができる。上記メッセージ6に基づいてユーザが所望の位置にカーソル8を置いた後、入力装置14または16等を押下すると、その時カーソル8が置かれた行50a等に対応する物体(物体ID=HMR−01等)の製品情報の選択が行なわれる。すなわち、製品情報の選択にカーソル8は必ずしも製品名欄51aに置かれている必要はなく、他のシリアル番号欄52等に置かれた状態であってもカーソル8が置かれた行50a等に対応する物体(物体ID=HMR−01等)の製品情報の選択が行なわれる。上述のように、種々の製品情報(例えば物体の色、形状、購入年月日、購入店等)も付加することができるため、ユーザは製品名を明確に覚えていない場合であっても、出力装置15に表示された他の上記製品情報の欄内における任意の行にカーソル8を置くことにより製品情報の選択を行なうことができる。識別子取得部31は、以上のようにして選択された物体の製品情報に対応する物体の識別子(物体ID1)を物体情報記録部50から取得することができる。
【0059】
図7は、本発明の実施例2における位置検索装置10のコンピュータが実行するプログラムの流れをフローチャートで示す。図7で図3と同じステップS番号を付した処理ブロックは同じ処理を行うため説明は省略する。図7に示されるように、ステップS10からS20までは図3のフローチャートにより示される処理と同様に実行されるため、省略して1つの処理ブロック(S10〜S20)で示す。図7に示されるフローチャートにおいても図3のフローチャートと同様に、物体OBJの地点をPとし、地点Pの3次元座標を(X2、Y2、Z2)とし、入力装置14から入力される時期情報を(2004.04.30)とする。検索部26により照合する履歴が検索された場合(ステップS30)、図3のステップS22と同じ処理を行って終了する(ステップS22)。一方、検索部26により照合する履歴が検索されなかった場合(ステップS30)、製品情報出力部30は、物体情報記録部50に記録された各物体の製品情報を出力装置15に出力し、物体の製品情報の選択を促す出力を行なう(ステップS32)。識別子取得部31は、製品情報出力部30による促しに基づいて、ユーザにより入力装置14等を用いて選択された物体の製品情報に対応する物体の識別子(物体ID1)を物体情報記録部50から取得する(ステップS34)。識別子読取部32は、RFIDリーダ17に、RFIDリーダ17が向けられた方向(ベクトルMの方向)の物体65に付されたRFIDタグ66から物体65の識別子(物体ID2)を読取らせる(ステップS36)。通知部33は、識別子取得部31により取得された識別子(物体ID1)と識別子読取部32により読取られた物体の識別子(物体ID2)とが一致する場合(ステップS38)、RFIDリーダ17が向けられた方向(ベクトルMの方向)に、製品情報出力部30による促しに基づいてユーザにより入力装置14等を用いて選択された物体の製品情報に対応する物体65が存在することを出力装置15に出力する(ステップS40)。図7に示されるように、ステップS38で物体ID1と物体ID2とが一致しなかった場合、そのまま終了することもできるし、ステップS36へ戻って処理を繰り返すこともできる。すなわち、識別子取得部31により取得された物体ID1と一致する物体ID2が見つかるまでRFIDリーダ17の方向(ベクトルMの方向)を変化させていくこともできる。
【0060】
以上より、本発明の実施例2によれば、検索部26により照合する履歴が検索されなかった場合、製品情報出力部30は、物体情報記録部50に記録された各物体の製品情報を出力装置15に出力し、物体の製品情報の選択を促す出力を行なう。識別子取得部31は、製品情報出力部30による促しに基づいて、ユーザにより入力装置14等を用いて選択された物体の製品情報に対応する物体の識別子(物体ID1)を物体情報記録部50から取得する。識別子読取部32は、RFIDリーダ17に、RFIDリーダ17が向けられた方向(ベクトルMの方向)の物体65に付されたRFIDタグ66から物体65の識別子(物体ID2)を読取らせる。通知部33は、識別子取得部31により取得された識別子(物体ID1)と識別子読取部32により読取られた物体の識別子(物体ID2)とが一致する場合、RFIDリーダが向けられた方向(ベクトルMの方向)に、製品情報出力部30による促しに基づいてユーザにより入力装置14等を用いて選択された物体の製品情報に対応する物体65が存在することを出力装置15に出力する。この結果、ユーザは探そうとしている製品、すなわち入力装置14等を用いて選択した物体の製品情報に対応する物体の位置がRFIDリーダ17が向けられた方向(ベクトルMの方向)に存在することを知ることができる。従って、ユーザにとって簡易に使用することができ、製品がいつどこに置かれていたかを覚えているがその製品名を正確に思い出せない場合であっても使用することができる製品の位置検索装置10等を提供することができる。
【実施例3】
【0061】
上述の実施例1または2の位置検索装置10において、入力装置14等はユーザ等の人の発話した音声情報を入力して認識を行なう音声認識装置(不図示)とすることもできる。例えば、物体OBJの現在位置の検索開始指示情報、照射光源12から光線70を照射するための指示等、時期情報および物体の製品情報の選択等は、ユーザ等の発話による音声情報により入力することもできる。音声認識装置としては、入力した音声データから特徴抽出を行なって音声認識を行なう通常の音声認識エンジンを用いることができる。この結果、ユーザはキー入力等を行なわずに済むため、さらに簡易に使用することができる製品の位置検索装置10等を提供することができる。
【実施例4】
【0062】
上述の実施例1ないし3のいずれかの位置検索装置10において、出力装置15は音声を用いて情報を出力する発話装置(不図示)とすることもできる。例えば、検索部26により検索された履歴中で最新の時期情報に対応する位置情報(X、Y、Z)を当該履歴に対応する物体OBJの現在位置として出力すること、物体情報記録部50に記録された各物体の製品情報の出力、物体の製品情報の選択を促す出力、RFIDリーダ17が向けられた方向(ベクトルMの方向)に、製品情報出力部30による促しに基づいてユーザにより選択された物体の製品情報に対応する物体65が存在することの出力等は、発話装置からの音声情報により出力することもできる。発話装置としては、予め録音してある音声データに必要な音声データを合成する通常の音声合成装置を用いることができる。この結果、ユーザは液晶ディスプレイ等を見なくても出力結果を得ることができるため、さらに簡易に使用することができる製品の位置検索装置10等を提供することができる。
【実施例5】
【0063】
上述の実施例1ないし4では、存在位置履歴記録部40は位置検索装置10内に設けられているものとして説明した。本実施例5では、ホームネットワーク等経由で接続されたホームサーバ等の外部のデータベースに存在位置履歴記録部40等が設置されている場合について説明する。
【0064】
図8は、本発明の実施例5における位置検索システム1を示す。図8で図1と同じ符号を付した箇所は同じ要素または同じ機能を有するため、説明は省略する。図8において、符号80は位置情報を取得する位置取得装置、85はホームネットワークまたはインターネット等のネットワーク77を介してホームサーバまたはウェブサーバ等のサーバ90と情報を送受信する通信装置、81は位置取得装置80の内部装置および機能等を示す内部構成であり、82は位置取得装置80のコンピュータが実行する機能を示す機能ブロックである。符号90はネットワーク77を介して位置取得装置80と情報を送受信するサーバ、91はサーバ90の内部装置および機能等を示す内部構成であり、92はサーバ90のコンピュータが実行する機能を示す機能ブロックである。図8に示されるように、位置検索システム1は位置取得装置80とネットワーク77を介して接続されたサーバ90とにより構成される。以下、位置検索システム1の有する位置取得装置80およびサーバ90のコンピュータが実行する機能について、図1に示される位置検索装置10のコンピュータが実行する機能との相違を中心に説明する。
【0065】
図8の機能ブロック82内に示されるように、光線放射部22から地点位置取得部25までは位置検索装置10と同様の機能であるため説明は省略する。図8の機能ブロック82内に示される送信部(送信手段)83は、地点位置取得部25により求められた地点Aの位置情報(Xa、Ya、Za)および入力装置14等から入力された時期情報(yyyy.mm.dd)を通信装置85を介してサーバ90へ送信する。出力部(出力手段)84は、サーバ90から通信装置85を介して受信した物体OBJの現在位置を出力装置15へ出力する。
【0066】
一方、サーバ90は、図8の内部構成91内に示されるように存在位置履歴記録部40を備えている。図8の機能ブロック92内に示されるように、検索部(検索手段)93は位置取得装置80の送信部83により送信された地点Aの位置情報(Xa、Ya、Za)および時期情報(yyyy.mm.dd)に照合する履歴を存在位置履歴記録部40から検索する。現在位置送信部(現在位置送信手段)94は、検索部93により検索された履歴中で最新の時期情報に対応する位置情報を当該履歴に対応する物体の現在位置として位置取得装置80へ送信する。以上のように、実施例5ではサーバ90側に存在位置履歴記録部40を設置し、検索部93の機能を負担させることができる。
【0067】
図9は、本発明の実施例5における位置検索システム1の位置取得装置80のコンピュータとサーバ90のコンピュータとが実行するプログラムの流れをフローチャートで示す。図9で図3と同じステップS番号を付した処理ブロックは同じ処理を行うため説明は省略する。図9に示されるフローチャートにおいても図3のフローチャートと同様に、物体OBJの地点をPとし、地点Pの3次元座標を(X2、Y2、Z2)とし、入力装置14から入力される時期情報を(2004.04.30)とする。図9において左側のフローチャートは位置取得装置80の処理の流れを示し、右側のフローチャートはサーバ90の処理の流れを示し、位置取得装置80とサーバ90との間の通信は両フローチャート間の点線により示す。
【0068】
図9に示されるように、位置取得装置80側では、ステップS10から、光線放射ステップ(ステップS12)、装置位置算出ステップ(ステップS14)、測定ステップ(ステップS16)、地点位置取得ステップ(ステップS18)まで図3のフローチャートと同様の処理を行う。光線放射ステップ(ステップS12)および装置位置算出ステップ(ステップS14)は、ステップS10で検索開始指示情報が入力され次第、並行して実行することもできる。次に、地点位置取得ステップ(ステップS18)で求められた地点Pの位置情報(X2、Y2、Z2)および入力装置14等から入力された時期情報(2004.04.30)を通信装置85を介してサーバ90へ送信する(送信ステップ。ステップS50)。
【0069】
サーバ90は、送信ステップ(ステップS50)で送信された地点Pの位置情報(X2、Y2、Z2)および時期情報(2004.04.30)に照合する履歴を存在位置履歴記録部40の履歴欄42から検索する(検索ステップ。ステップS52)。続いて、検索ステップ(ステップS54)で検索された履歴中で最新の時期情報(2004.05.10)に対応する位置情報(X1、Y1、Z1)を当該履歴に対応する物体の現在位置として位置取得装置80へ送信する(現在位置送信ステップ。ステップS54)。
【0070】
位置取得装置80は、現在位置送信ステップ(ステップS54)でサーバ90から送信され通信装置85を介して受信した物体の現在位置を出力装置15へ出力する(出力ステップ。ステップS56)。上述のように、現在位置は位置情報(X1、Y1、Z1)および/または位置名称とすることができる。
【0071】
以上より、本発明の実施例5によれば、ネットワーク77経由で接続されたサーバ90側に存在位置履歴記録部40等がある場合にも、通信装置85を備えた位置取得装置80を用いることにより、実施例1等と同様の効果を奏することができる。すなわち、位置取得装置80を過去に物体OBJ(例:物体ID=HMR−01)が存在していたと思われる位置(例:地点P)へ向け、入力装置16等を押下することにより、物体OBJの現在位置の検索開始指示情報が入力される。当該検索開始指示情報の入力に基づき、光線放射部22が照射光源12に光線70を放射させ、光線70は地点Pを指示し、装置位置算出部23が位置センサ11を用いて位置取得装置80の位置情報(Xo、Yo、Zo)を算出する。上記検索開始指示情報の入力に基づき、測定部24が測定装置13に対し、光線放射部22により照射光源12から放射された光線70が指示する地点Pと装置位置算出部23により算出された位置取得装置80の位置情報(Xo、Yo、Zo)により示される位置との間の距離R、当該位置情報(Xo、Yo、Zo)により示される位置から地点Pへの仰角θおよび所定の基準方角N(例えば真北)から地点Pへの方位角αを測定させる。地点位置取得部25は、装置位置算出部23により算出された位置取得装置80の位置情報(Xo、Yo、Zo)と、測定部24により測定された地点Pと位置取得装置80の位置との間の距離R、当該位置情報(Xo、Yo、Zo)により示される位置から地点Pへの仰角θおよび所定の基準方角N(例えば真北)から地点Pへの方位角αとに基づき、地点Pの位置情報(X2、Y2、Z2)を求める。送信部83は、地点位置取得部25により求められた地点Pの位置情報(X2、Y2、Z2)および入力装置14等から入力された時期情報(2004.04.30)を通信装置12を介してサーバ90へ送信する。
【0072】
サーバ90の検索部93は、送信部83により送信された地点Pの位置情報(X2、Y2、Z2)および時期情報(2004.04.30)に照合する履歴を存在位置履歴記録部40から検索する。現在位置送信部94は、検索部93により検索された履歴中で最新の時期情報(2004.05.10)に対応する位置情報(X1、Y1、Z1)を当該履歴に対応する物体の現在位置として位置取得装置80へ送信する。
【0073】
出力部84は、サーバ90から通信装置85を介して受信した物体OBJの現在位置を出力装置15へ出力する。以上の結果、ネットワーク77経由で接続されたサーバ90側に存在位置履歴記録部40等がある場合にも、位置取得装置80を物体OBJが過去に存在していたと思われる地点へ向けて入力装置16等を押下し、物体OBJが当該地点に存在していたと思われる時期情報を入力装置14等から入力するだけで、物体OBJが現在存在している地点の位置情報を位置取得装置80の出力装置15に出力させることができる。従って、実施例1等と同様にユーザにとって簡易に使用することができ、製品がいつどこに置かれていたかを覚えているがその製品名を正確に思い出せない場合であっても使用することができる製品の位置検索システム1または方法を提供することができる。さらに、サーバ90側に存在位置履歴記録部40を設置し、検索部93の機能を負担させることができるため、位置取得装置80自体は軽量、小型化することが可能となる。
【実施例6】
【0074】
実施例5では、サーバ90側の検索部93が位置取得装置80側の送信部83により送信された地点Pの位置情報(X2、Y2、Z2)および時期情報(2004.04.30)に照合する履歴を存在位置履歴記録部40から検索できた場合について説明した。本実施例6では、検索部93により照合する履歴が検索されなかった場合、すなわち存在位置履歴記録部40の履歴欄42の内容に上記位置情報および上記時期情報がなかった場合の処理について説明する。
【0075】
実施例6では、サーバ90側が記録している物体に関する情報を位置取得装置80側のユーザ側へ提供し、ユーザ側にそれらの情報の中から探そうとしている製品を選択させ、当該選択に基づき物体IDを取得し、位置取得装置80に新たに設けられたRFIDリーダ17を用いて当該物体IDに等しいRFIDタグを付けている物体を探すという処理を行う。この結果、ユーザは探そうとしている製品の位置を知ることができる。
【0076】
図10は、本発明の実施例6における位置検索システム2を説明するための図である。図10で図8および図4と同じ符号を付した箇所は同じ要素または同じ機能を有するため、説明は省略する。図10に示されるように、位置取得装置80には新たにRFIDリーダ17が設けられている。本実施例6においても実施例2と同様にRFIDタグ66を便宜上パッシブ型として説明する。従って、RFIDタグ66はRFIDリーダ17から非接触電力伝送により電波を受け取り、そのエネルギにより送受信を行なう。しかし実施例2と同様に、RFIDタグ66がアクティブ型であってもよいことは勿論である。
【0077】
次に、実施例6のサーバ90の内部構成91および機能ブロック92について説明する。図10に示されるように、検索部93により照合する履歴が検索されなかった場合のために、内部構成91には物体情報記録部50が新たに設置され、機能ブロック92には製品情報送信部(製品情報送信手段)95、識別子取得部(識別子取得手段)96、通知情報送信部(通知情報送信手段)97が新たに設けられている。製品情報送信部95は、物体情報記録部50に記録された各物体の製品情報を位置取得装置80へネットワーク77を介して送信する。識別子取得部96は、位置取得装置80から送信された物体の製品情報に対応する当該物体の識別子(物体ID1)を物体情報記録部50から取得する。通知情報送信部97は、識別子取得部96により取得された識別子(物体ID1)と位置取得装置80から送信された物体65の識別子(物体ID2)とが一致する場合、RFIDリーダ17が向けられた方向(ベクトルMの方向)に位置取得装置80から送信された物体の製品情報に対応する物体が存在することの通知情報を位置検索装置80へ送信する。
【0078】
次に、実施例6の位置取得装置80の機能ブロック82について説明する。図10に示されるように、機能ブロック82にはサーバ90の検索部93により照合する履歴が検索されなかった場合のために、製品情報出力部(製品情報出力手段)85、入力製品情報送信部(入力製品情報送信手段)86、識別子読取部(識別子読取手段)32、識別子送信部(識別子送信手段)87および通知部(通知手段)88が新たに設けられている。製品情報出力部85は、サーバ90の製品情報送信部95により送信された各物体の製品情報を出力装置15に出力し、物体の製品情報の選択を促す。入力製品情報送信部86は、製品情報出力部85による促しに基づいて、ユーザにより入力装置14等を用いて選択された物体の製品情報を通信装置85を用いてサーバ90へ送信する。識別子読取部32は実施例2と同様に、RFIDリーダ17にRFIDリーダ17が向けられた方向(ベクトルMの方向)の物体65に付されたRFIDタグ66から物体65の識別子(物体ID2)を読取らせる。識別子送信部87は、識別子読取部32により読取られた物体の識別子(物体ID2)を通信装置85を用いてサーバ90へ送信する。通知部88は、サーバ90の通知情報送信部97により送信された通知情報を出力装置15に出力する。この結果、ユーザは探そうとしている製品、すなわち入力装置14等を用いて選択した物体の製品情報に対応する物体の位置は、RFIDリーダ17が向けられた方向(ベクトルMの方向)に存在することを知ることができる。
【0079】
図11は、本発明の実施例6における位置取得装置80およびサーバ90の各コンピュータが実行するプログラムの流れをフローチャートで示す。図11で図9と同じステップS番号を付した処理ブロックは同じ処理を行うため説明は省略する。図11に示されるように、ステップS10からS18までは図9のフローチャートにより示される処理と同様に実行されるため省略して1つの処理ブロック(S10〜S18)で示す。図11に示されるフローチャートにおいても図9のフローチャートと同様に、物体OBJの地点をPとし、地点Pの3次元座標を(X2、Y2、Z2)とし、入力装置14から入力される時期情報を(2004.04.30)とする。図11においても図9のフローチャートと同様に、左側のフローチャートは位置取得装置80の処理の流れを示し、右側のフローチャートはサーバ90の処理の流れを示し、位置取得装置80とサーバ90との間の通信は両フローチャート間の点線により示す。
【0080】
図11に示されるように、位置取得装置80側では、ステップS10から、光線放射ステップ(ステップS12)、装置位置算出ステップ(ステップS14)、測定ステップ(ステップS16)、地点位置取得ステップ(ステップS18)まで図9のフローチャートと同様の処理を行う。次に、地点位置取得ステップ(ステップS18)で求められた地点Pの位置情報(X2、Y2、Z2)および入力装置14等から入力された時期情報(2004.04.30)を通信装置85を介してサーバ90へ送信する(送信ステップ。ステップS50)。
【0081】
サーバ90は、送信ステップ(ステップS50)で送信された地点Pの位置情報(X2、Y2、Z2)および時期情報(2004.04.30)に照合する履歴を存在位置履歴記録部40の履歴欄42から検索する(検索ステップ。ステップS52)。検索ステップ(ステップS52)で照合する履歴が検索された場合(ステップS56)、図9のステップS54と同じ処理を行って終了する(ステップS54)。一方、検索ステップ(ステップS52)で照合する履歴が検索されなかった場合(ステップS56)、物体情報記録部50に記録された各物体の製品情報を位置取得装置80へ送信する(製品情報送信ステップ。ステップS58)。
【0082】
位置取得装置80は、製品情報送信ステップ(ステップS58)で送信された各物体の製品情報を出力装置15に出力し、物体の製品情報の選択を促す(製品情報出力ステップ。ステップS70)。次に、製品情報出力ステップ(ステップS70)における促しに基づいて、ユーザにより入力装置14等を用いて選択された物体の製品情報をサーバ90へ送信する(入力製品情報送信ステップ。ステップS72)。続いて、RFIDリ−ダ17に、RFIDリーダ17が向けられた方向(ベクトルMの方向)の物体65に付されたRFIDタグ66から物体65の識別子(物体ID2)を読取らせる(識別子読取ステップ。ステップS74)。識別子読取ステップ(ステップS74)で読取られた物体65の識別子(物体ID2)をサーバ90へ送信する(識別子送信ステップ。ステップS76)。
【0083】
サーバ90は、入力製品情報送信ステップ(ステップS72)で送信された物体の製品情報に対応する物体の識別子(物体ID1)を物体情報記録部50から取得する(識別子取得ステップ。ステップS60)。次に、識別子取得ステップ(ステップS60)で取得された識別子(物体ID1)と識別子送信ステップ(ステップS76)で送信された物体の識別子(物体ID2)とが一致する場合(ステップS62)、RFIDリーダ17が向けられた方向(ベクトルMの方向)に位置取得装置80から送信された物体の製品情報に対応する物体65が存在することの通知情報を位置検索装置80に送信して(通知情報送信ステップ。ステップS64)、終了する。ステップS62で物体ID1と物体ID2とが一致しなかった場合は、そのまま終了する。あるいは、物体ID1と一致する物体ID2を有する物体が見つかるまで位置取得装置80側へRFIDリーダ17の方向(ベクトルMの方向)を変化させる指示を出し、ステップS62の判断を繰り返すこともできる(不図示)。
【0084】
位置取得装置80は、通知情報送信ステップ(ステップS64)で送信された通知情報を出力装置15に出力して(通知ステップ。ステップS78)、終了する。
【0085】
以上より、本発明の実施例6によれば、検索部93により照合する履歴が検索されなかった場合、サーバ90の製品情報送信部95は、物体情報記録部50に記録された各物体の製品情報を位置取得装置80へネットワーク77を介して送信する。位置取得装置80の製品情報出力部85は、サーバ90の製品情報送信部95により送信された各物体の製品情報を出力装置15に出力し、物体の製品情報の選択を促す。入力製品情報送信部86は、製品情報出力部85による促しに基づいて、ユーザにより入力装置14等を用いて選択された物体の製品情報をサーバ90へ送信する。サーバ90の識別子取得部96は、位置取得装置80から送信された物体の製品情報に対応する当該物体の識別子(物体ID1)を物体情報記録部50から取得する。位置取得装置80の識別子読取部32は実施例2と同様に、RFIDリーダ17にRFIDリーダ17が向けられた方向(ベクトルMの方向)の物体65に付されたRFIDタグ66から物体65の識別子(物体ID2)を読取らせる。識別子送信部87は、識別子読取部32により読取られた物体の識別子(物体ID2)をサーバ90へ送信する。サーバ90の通知情報送信部97は、識別子取得部96により取得された識別子(物体ID1)と位置取得装置80から送信された物体65の識別子(物体ID2)とが一致する場合、RFIDリーダ17が向けられた方向(ベクトルMの方向)に位置取得装置80から送信された物体の製品情報に対応する物体が存在することの通知情報を位置検索装置80に送信する。通知部88は、通知情報送信部97により送信された通知情報を出力装置15に出力する。この結果、ユーザは探そうとしている製品、すなわち入力装置14等を用いて選択した物体の製品情報に対応する物体の位置は、RFIDリーダ17が向けられた方向(ベクトルMの方向)に存在することを知ることができる。従って、実施例5と同様にユーザにとって簡易に使用することができ、製品がいつどこに置かれていたかを覚えているがその製品名を正確に思い出せない場合であっても使用することができる製品の位置検索システム2または方法を提供することができる。さらに、サーバ90側に存在位置履歴記録部40を設置し検索部93の機能を負担させ、物体情報記録部50を設置し識別子取得部96の機能を負担させることができるため、位置取得装置80自体はさらに軽量、小型化することが可能となる。
【実施例7】
【0086】
上述の実施例5または6の位置検索システム1、2または方法等において、入力装置14等はユーザ等の人の発話した音声情報を入力して認識を行なう音声認識装置(不図示)とすることもできる。例えば、物体OBJの現在位置の検索開始指示情報、照射光源12から光線70を照射するための指示等、時期情報および物体の製品情報の選択等は、ユーザ等の発話による音声情報により入力することもできる。音声認識装置としては、入力した音声データから特徴抽出を行なって音声認識を行なう通常の音声認識エンジンを用いることができる。この結果、ユーザはキー入力等を行なわずに済むため、さらに簡易に使用することができる製品の位置検索システム1、2または方法等を提供することができる。
【実施例8】
【0087】
上述の実施例5ないし7の位置検索システム1、2または方法等において、出力装置15は音声を用いて情報を出力する発話装置(不図示)とすることもできる。例えば、検索部93により検索された履歴中で最新の時期情報に対応する位置情報(X、Y、Z)を当該履歴に対応する物体OBJの現在位置として出力すること、物体情報記録部50に記録された各物体の製品情報の出力、物体の製品情報の選択を促す出力、RFIDリーダ17が向けられた方向(ベクトルMの方向)に、製品情報出力部85による促しに基づいてユーザにより選択された物体の製品情報に対応する物体65が存在することの出力等は、発話装置からの音声情報により出力することもできる。発話装置としては、予め録音してある音声データに必要な音声データを合成する通常の音声合成装置を用いることができる。この結果、ユーザは液晶ディスプレイ等を見なくても出力結果を得ることができるため、さらに簡易に使用することができる製品の位置検索システム1、2または方法等を提供することができる。
【実施例9】
【0088】
本実施例9では、物体の現在位置を収集し、存在位置履歴記録部40に記録(または更新)する位置収集装置について説明する。図12は、本発明の実施例9における位置収集装置100を示す。図12で図1または図4と同じ符号を付した箇所は同じ要素を示すため、説明は省略する。図12において、位置センサ11は位置収集装置100の位置情報の取得に用いる。測定装置13は照射光源12から放射された光線70により指示された物体68(地点B)と位置収集装置100との間の距離Rb、位置収集装置100の位置から地点Bへの仰角θbおよび所定の基準方角N(例えば真北)から地点Bへの方位角αbを測定する。実施例1と同様に、測定装置13は通常のレーザ距離計を用いることにより距離Rb、仰角θbおよび方位角αbを測定することができる。RFIDリーダ17は物体68に付されたRFIDタグ67から識別子を読取る。符号19は現在時刻を計時するタイマ、101は位置収集装置100の電源スイッチ、102は位置収集装置100の内部装置および機能等を示す内部構成であり、103は位置収集装置100のコンピュータが実行する機能を示す機能ブロックである。図12に示されるように、位置収集装置100は実施例1等の位置検索装置10から入出力装置14等および出力装置15というヒューマンインタフェース部分を取除いた簡便な装置となっている。
【0089】
次に、位置収集装置100の機能ブロック103について説明する。以下の機能は位置収集装置100の電源スイッチ101がオンになると実行される。物体位置取得部(物体位置取得手段)104は、装置位置算出部23により算出された位置収集装置100の位置情報(X0、Y0、Z0)と、測定部24により測定された物体68と位置収集装置100の位置との間の距離Rb、当該位置情報(Xo、Yo、Zo)により示される位置から地点Bへの仰角θbおよび所定の基準方角N(例えば真北)から地点Bへの方位角αbとに基づき、位置Bにある物体68の位置情報(Xb、Yb、Zb)を求める。詳細は実施例1と同様であるため省略する。この結果、例えば、(Xb、Yb、Zb)=(Xo−Db、Yo、Zo+Hb)となる。ここで、Dbは地点Bへの水平距離、Hbは地点Bとの高度差である。履歴取得部(履歴取得手段)105は、識別子読取部32により読取られた位置収集装置100からベクトルMbにより示される方向にある物体68の識別子に照合する識別子を存在位置履歴記録部40から検索し、照合した識別子に対応する履歴を取得する。更新部(更新手段)106は、物体位置取得部104により求められた物体68の位置情報(Xb、Yb、Zb)およびタイマ19により計時された現在時刻に基づく時期情報(yyyy.mm.dd)を用いて、履歴取得部105により取得された履歴を更新する。追加部(追加手段)107については後述する。
【0090】
図13(A)は本発明の実施例9における存在位置履歴記録部40の構成例を示す。図13(A)で図2(A)と同じ符号を付した箇所は同じ要素を示すため説明は省略する。図13(A)に示されるように、物体ID欄41がBOX−01の行40nでは履歴欄42の内容は(((X6、Y6、Z6)、(2004.06.10)))である。すなわち、物体IDがBOX−01である物体は、2004年6月10日に位置情報(X6、Y6、Z6)で示される位置にいたことを示す。図13(B)は本発明の実施例9における更新後の存在位置履歴記録部40の構成例を示す。図13(B)で図13(A)と同じ符号を付した箇所は同じ要素を示すため説明は省略する。
【0091】
識別子読取部32により読取られた物体68の識別子(物体ID)をBOX−01とすると、履歴取得部105はBOX−01に照合する識別子(物体ID)を存在位置履歴記録部40から検索する。すなわち、図13(A)に示される存在位置履歴記録部40の物体ID欄41を検索する。この場合、行40nにおいて物体ID=BOX−01と照合するため、履歴欄42から対応する履歴(((X6、Y6、Z6)、(2004.06.10)))を取得する。タイマ19により計時された現在時刻に基づく時期情報を(2004.06.17)とすると、更新部106は、物体68の位置情報(Xb、Yb、Zb)および時期情報(2004.06.17)を用いて上記履歴を更新し、図13(B)の行40nの履歴欄42に示されるように、履歴(((Xb、Yb、Zb)、(2004.06.17))、((X6、Y6、Z6)、(2004.06.10)))とすることができる。以上により、位置収集装置100を所望の方向へ向けて物体68等の位置情報(Xb、Yb、Zb)と物体68等の識別子(物体ID)とを得ることができる。存在位置履歴記録部40の物体ID欄41内で物体68等の識別子(物体ID)と等しい値を有する識別子(物体ID)を検索し、対応する履歴を物体68等の位置情報(Xb、Yb、Zb)とタイマ19により計時された現在時刻に基づく時期情報(2004.06.17)とを用いて更新することができる。
【0092】
図14は、本発明の実施例6における位置収集装置100のコンピュータが実行するプログラムの流れをフローチャートで示す。図14に示されるフローチャートでは物体68の地点をBとし、地点Bの3次元座標を(Xb、Yb、Zb)とし、タイマ19により計時された現在時刻に基づく時期情報を(2004.06.17)とし、物体68の識別子(物体ID)をBOX−01とする。図14に示されるように、まず、位置収集装置100の電源スイッチ101がオンになると、光線放射部22が照射光源12に光線70を放射させる(ステップS80)。次に、装置位置算出部23が位置センサ11を用いて位置収集装置100の位置情報(X0、Y0、Z0)を算出する(ステップS82)。以上のステップS80およびS82は、位置収集装置100の電源スイッチ101がオンになり次第、並行して実行することもできる。
【0093】
続いて、測定部24は測定装置13に、光線放射部22により照射光源12から放射された光線70が指示する物体68と装置位置算出部23により算出された位置収集装置100の位置との間の距離Rb、位置収集装置100の位置から地点Bへの仰角θbおよび所定の基準方角N(例えば真北)から地点Bへの方位角αbを測定させる(ステップS84)。物体位置取得部104は、装置位置算出部23により算出された位置収集装置100の位置情報(X0、Y0、Z0)と、測定部24により測定された物体68と位置収集装置100の位置との間の距離Rb、当該位置情報(Xo、Yo、Zo)により示される位置から地点Bへの仰角θbおよび所定の基準方角N(例えば真北)から地点Bへの方位角αbとに基づき、物体68の位置情報(Xb、Yb、Zb)を求める(ステップS86)。識別子読取部32は、物体68に付されたRFIDタグ67から物体68の識別子(物体ID=BOX−01)をRFIDリーダ17に読取らせる(ステップS88)。履歴取得部105は、識別子読取部32により読取られた物体68の識別子(物体ID=BOX−01)に照合する識別子を存在位置履歴記録部40の物体ID欄41から検索し、照合した識別子に対応する履歴を履歴欄42から取得する(ステップS90)。更新部106は、物体位置取得部104により求められた物体68の位置情報(Xb、Yb、Zb)およびタイマ19により計時された現在時刻に基づく時期情報(2004.06.17)を用いて、履歴取得部105により取得された履歴を更新する(ステップ92)。
【0094】
次に、追加部107の機能について説明する。追加部107は、履歴取得部105により物体68の識別子(物体ID=BOX−01)に照合する識別子が検索されなかった場合、上記識別子(物体ID=BOX−01)を用いて、物体位置取得部104により求められた物体68の位置情報(Xb、Yb、Zb)およびタイマ19により計時された現在時刻に基づく時期情報(2004.06.17)を物体68の履歴として存在位置履歴記録部40に追加することができる。
【0095】
図15(A)は、本発明の実施例9における存在位置履歴記録部40の別の構成例を示す。図15(A)で図13(A)と同じ符号を付した箇所は同じ要素を示すため説明は省略する。図15(A)に示されるように、存在位置履歴記録部40の物体ID欄41には識別子(物体ID=BOX−01)が含まれていないため、履歴取得部105により物体68の識別子(物体ID=BOX−01)に照合する識別子は検索されない。そこで、追加部107は識別子(物体ID=BOX−01)を用いて、物体位置取得部104により求められた物体68の位置情報(Xb、Yb、Zb)およびタイマ19により計時された現在時刻に基づく時期情報(2004.06.17)を物体68の履歴として存在位置履歴記録部40に追加する。図15(B)は、本発明の実施例9における追加後の存在位置履歴記録部40の構成例を示す。図15(B)で図15(A)と同じ符号を付した箇所は同じ要素を示すため説明は省略する。図15(B)の行40pに示されるように、追加部107により存在位置履歴記録部40の物体ID欄41に新たに識別子(物体ID=BOX−01)が設定され、対応する履歴欄42に新たに履歴(((Xb、Yb、Zb)、(2004.06.17)))が設定されている。
【0096】
図16は、本発明の実施例6における位置収集装置100のコンピュータが実行するプログラムの流れをフローチャートで示す。図16に示されるフローチャートにおいても物体68の地点をBとし、地点Bの3次元座標を(Xb、Yb、Zb)とし、タイマ19により計時された現在時刻に基づく時期情報を(2004.06.17)とし、物体68の識別子(物体ID)をBOX−01とする。図16で図14と同じステップS番号を付した処理ブロックは同じ処理を行うため説明は省略する。図16に示されるように、ステップS80からS90までは図14のフローチャートにより示される処理と同様に実行されるため省略して1つの処理ブロック(S80〜S90)で示す。履歴取得部105により物体68の識別子(物体ID=BOX−01)に照合する識別子が検索された場合(ステップS91)、図14のステップS92と同じ処理を行って終了する(ステップS92)。一方、履歴取得部105により物体68の識別子(物体ID=BOX−01)に照合する識別子が検索されなかった場合(ステップS91)、追加部107は識別子(物体ID=BOX−01)を用いて、物体位置取得部104により求められた物体68の位置情報(Xb、Yb、Zb)およびタイマ19により計時された現在時刻に基づく時期情報(2004.06.17)を物体68の履歴として存在位置履歴記録部40に追加して(ステップS94)、終了する。
【0097】
以上より、本発明の実施例9によれば、位置収集装置100の電源スイッチ101がオンになると、物体位置取得部104は装置位置算出部23により算出された位置収集装置100の位置情報(X0、Y0、Z0)と、測定部24により測定された物体68と位置収集装置100の位置との間の距離Rb、当該位置情報(Xo、Yo、Zo)により示される位置から地点Bへの仰角θbおよび所定の基準方角N(例えば真北)から地点Bへの方位角αbとに基づき、位置Bにある物体68の位置情報(Xb、Yb、Zb)を求める。履歴取得部105は、識別子読取部32により読取られた位置収集装置100からベクトルMbにより示される方向にある物体68の識別子に照合する識別子を存在位置履歴記録部40から検索し、照合した識別子に対応する履歴を取得する。更新部106は、物体位置取得部104により求められた物体68の位置情報(Xb、Yb、Zb)およびタイマ19により計時された現在時刻に基づく時期情報(2004.06.17)を用いて、履歴取得部105により取得された履歴を更新する。追加部107は、履歴取得部105により物体68の識別子(物体ID=BOX−01)に照合する識別子が検索されなかった場合、上記識別子(物体ID=BOX−01)を用いて、物体位置取得部104により求められた物体68の位置情報(Xb、Yb、Zb)およびタイマ19により計時された現在時刻に基づく時期情報(2004.06.17)を物体68の履歴として存在位置履歴記録部40に追加することができる。
【0098】
従って、位置収集装置100の電源スイッチ101をオンにした後、RFIDリーダ17を所望の物体68等の存在している方向(ベクトルMb等)へ向けるだけで、存在位置履歴記録部40における物体68等の識別子(物体ID=BOX−01等)に対応する履歴を更新することができる。存在位置履歴記録部40に物体68等の識別子(物体ID=BOX−01等)が存在しない場合は、物体68等の位置情報(Xb、Yb、Zb)およびタイマ19により計時された現在時刻に基づく時期情報(2004.06.17)等を物体68の履歴として、上記識別子(物体ID=BOX−01)に対応させて新たに存在位置履歴記録部40に設けることができる。従って、ユーザがその製品名を正確に思い出せない場合であっても、その製品(物体ID=BOX−01)がいつどこに置かれていたかを簡易に更新することができ、場合に応じて追加することができる製品の位置収集装置100を提供することができる。
【0099】
上述の位置収集装置100を用いて物体の位置を収集する位置収集方法として以下のような方法が挙げられる。家庭内でRFIDタグを有する物品に関しては、位置収集装置100を概ね当該物品があったと思われる心当たりの場所へ向けて掃引するように用いることにより、物品の位置を収集(更新または追加)することができる。あるいは、棚または収納扉等に位置収集装置100を据え付けておくことにより、棚または収納扉等内で位置が変化した物品、新たに収納された物品、外へ取り出された物品等に関し、物品の位置を収集(更新または追加)することができる。または電気掃除機のノズルの先等に位置収集装置100を据え付けておくことにより、掃除をする度に物品の位置を収集(更新または追加)することができる。
【実施例10】
【0100】
図17は、上述した各実施例を実現するための本発明のコンピュータ・プログラムを実行する位置検索装置10、位置取得装置80、サーバ90または位置収集装置100のコンピュータの内部回路120を示すブロック図である。図17に示されるように、CPU121、ROM122、RAM123、画像制御部125、コントローラ127、入力制御部128および外部インタフェース(I/F)部130はバス131に接続されている。図17において、上述の本発明のコンピュータ・プログラムは、ROM122、ディスク126a、CD−ROMあるいはDVD126n等の記録媒体(脱着可能な記録媒体を含む)に記録されている。ディスク126aには存在位置履歴記録部40、物体情報記録部50等が記録されている。本発明のコンピュータ・プログラムは、ROM122からバス131を介し、またはディスク126a、CD−ROMまたはDVD126n等の記録媒体からコントローラ127を経由してバス131を介しRAM123へロードされる。入力制御部128はテンキー等の入力装置14等、測定装置13、RFIDリーダ17等の入力操作部129と接続され入力制御等を行う。画像メモリであるVRAM124は出力装置15の少なくとも一画面分のデータ容量に相当する容量を有しており、画像制御部125はVRAM124のデータを画像データへ変換して出力装置15へ送出する機能を有している。外部I/F部130は、通信装置85を介してネットワーク77と通信する際の入出力インタフェース機能を有する。
【0101】
上述のようにCPU121が上述の本発明のコンピュータ・プログラムを実行することにより、本発明の目的を達成することができる。当該コンピュータ・プログラムは上述のようにCD−ROMまたはDVD126n等の記録媒体の形態でコンピュータCPU121に供給することができ、当該コンピュータ・プログラムを記録したCD−ROMまたはDVD126n等の記録媒体も同様に本発明を構成することになる。当該コンピュータ・プログラムを記録した記録媒体としては上述された記録媒体の他に、例えばメモリ・カード、メモリ・スティック、光ディスク、FD等を用いることができる。
【産業上の利用可能性】
【0102】
本発明の活用例として、視覚障害者が物品の位置を検索等する場合の補助器具に適用することができる。さらに、引越しの際等における物品の位置管理に適用することができる。例えば、段ボール箱内の物品の位置管理、前住居と新住居との間での物品または家具等の置き場所の管理等に適用することができる。
【図面の簡単な説明】
【0103】
【図1】本発明の実施例1における位置検索装置10を説明するための図である。
【図2(A)】本発明の実施例1における存在位置履歴記録部40の構成例を示す図である。
【図2(B)】位置情報と位置名称との変換テーブルを示す図である。
【図3】本発明の実施例1における位置検索装置10のコンピュータが実行するプログラムの流れを示すフローチャートである。
【図4】本発明の実施例2における位置検索装置10を説明するための図である。
【図5】物体情報記録部50の構成例を示す図である。
【図6】本発明の実施例2において、製品情報出力部30が出力装置15に出力する物体情報記録部50に記録された各物体の製品情報の例を示す図である。
【図7】本発明の実施例2における位置検索装置10のコンピュータが実行するプログラムの流れを示すフローチャートである。
【図8】本発明の実施例5における位置検索システム1を示す図である。
【図9】本発明の実施例5における位置検索システム1の位置取得装置80のコンピュータとサーバ90のコンピュータとが実行するプログラムの流れを示すフローチャートである。
【図10】本発明の実施例6における位置検索システム2を説明するための図である。
【図11】本発明の実施例6における位置取得装置80およびサーバ90の各コンピュータが実行するプログラムの流れを示すフローチャートである。
【図12】本発明の実施例9における位置収集装置100を示す図である。
【図13(A)】本発明の実施例9における存在位置履歴記録部40の構成例を示す図である。
【図13(B)】本発明の実施例9における更新後の存在位置履歴記録部40の構成例を示す図である。
【図14】本発明の実施例6における位置収集装置100のコンピュータが実行するプログラムの流れを示すフローチャートである。
【図15(A)】本発明の実施例9における存在位置履歴記録部40の別の構成例を示す図である。
【図15(B)】本発明の実施例9における追加後の存在位置履歴記録部40の構成例を示す図である。
【図16】本発明の実施例6における位置収集装置100のコンピュータが実行するプログラムの流れを示すフローチャートである。
【図17】上述した各実施例を実現するための本発明のコンピュータ・プログラムを実行する位置検索装置10、位置取得装置80、サーバ90または位置収集装置100のコンピュータの内部回路120を示すブロック図である。
【符号の説明】
【0104】
1,2 位置検索システム、 6 メッセージ表示、 8 カーソル、 10 位置検索装置、 11 位置センサ、 12 照射光源、 13 測定装置、 14,16,18a,18b 入力装置、 15 出力装置、 17 RFIDリーダ、 19 タイマ、 20,81,91,102 内部構成、 21,82,92,103 機能ブロック、 22 光線放射部、 23 装置位置算出部、 24 測定部、 25 地点位置取得部、 26,93 検索部、 27 出力部、 30,85 製品情報出力部、 31,96 識別子取得部、 32 識別子読取部、 33,88 通知部、 40 存在位置履歴記録部、 40a,40b,40m,40n,40p 物体情報記録部50内の行、 41 物体ID欄、 42 履歴欄、 45 変換テーブル、 45a,45b,45j,45k 変換テーブル45内の行、 46 位置情報欄、 47 位置名称欄、 50 物体情報記録部、 60 収納棚、 61 上段、 62 中段、 63 下段、 65,68 物体、 66,67 RFIDタグ、 70 光線、 75 電波、 86 入力製品情報送信部、 87 識別子送信部、 90 サーバ、 94 現在位置送信部、 95 製品情報送信部、 97 通知情報送信部、 100 位置収集装置、 101 電源スイッチ、 104 物体位置取得部、 105 履歴取得部、 106 更新部、 107 追加部、 120 内部回路、 121 CPU、 122 ROM、 123 RAM、 124 VRAM、 125 画像制御部、 127 コントローラ、 126a ディスク、 126n CD−ROM,DVD、 128 入力制御部、 129 入力操作部、 130 外部I/F部、 131 バス。
【技術分野】
【0001】
本発明は、物体の現在位置を検索する位置検索装置等および物体の現在位置を収集する位置収集装置等に関する。
【背景技術】
【0002】
近年、ICチップおよびアンテナを内蔵した無線自動識別(Radio Frequency IDentification : RFID)タグの利用が盛んに行なわれている。RFIDタグのICチップ中のメモリには情報が記録されており、外部のRFIDリーダによってこの情報が読取られる。RFIDタグは製品等に添付するだけでなく、そのまま製品等に埋め込むこともできる。RFIDタグには電池を内蔵するアクティブ型と電池を内蔵しないパッシブ型との2種類がある。アクティブ型は内蔵する電池により送受信を行なうものであり、交信距離は長いが電池を内蔵するため小型化は難しく価格は高めである。一方、パッシブ型は外部のRFIDリーダから非接触電力伝送により電波を受け取り、そのエネルギにより送受信を行なうものであり、小型化および低価格化は可能であるが交信距離は限られる。非接触電力伝送としては、距離が数ミリセンチから数10センチの場合、一般に電磁誘導方式が用いられている。
【0003】
現在、RFIDタグを利用した種々の技術的提案および枠組みの検討が行なわれている。このような技術的提案等のための標準化団体も存在しており、各々枠組みを示している(例えば、非特許文献1および2を参照。)。いずれも基本的には同様であり、まずRFIDタグに記録された情報(ID。例えば製品識別コード)をRFIDリーダ(無線自動識別タグ読取器)によって読取り、当該IDを所定のサーバへ送信する。所定のサーバはインターネットを介して別のサーバへ当該IDを送り、別のサーバは当該IDに基づく情報(例えば製品情報)を有するデータベースサーバのインターネット上のアドレスを解決して所定のサーバへ送り返す。この後、所定のサーバはデータベースサーバへ当該IDを送り、データベースサーバは当該IDに基づき情報(例えば製品情報)を取り出して所定のサーバへ送る。以上のように、標準化団体は主としてRFIDタグが添付された製品等の同定または識別のための枠組み等の検討を行なっている。
【0004】
上述の検討等以外に、製品(例えば本)が置かれた位置を検索する位置検索システムが検討されている。この位置検索システムでは、例えば図書館等において各本にRFIDタグを添付しておき、各書棚にRFIDリーダを設置しておく。ユーザがRFIDリーダと接続された端末等から所望の本の名前を入力すると、各書棚に設置されたRFIDリーダが各本のRFIDタグを読取り、結果的にユーザの所望の本が現在置かれている位置を端末等に表示することができる。
【0005】
【非特許文献1】“EPCネットワーク”、[online]、AUTO-ID LABS JAPAN、[平成16年5月27日検索]、インターネット<URL:http://www.auto-id.jp/tech/index-j.html>
【非特許文献2】“ユビキタスIDアーキテクチャ”、[online]、ユビキタスIDセンタ、[平成16年5月27日検索]、インターネット <URL:http://www.uidcenter.org/japanese/architecture.html>
【発明の開示】
【発明が解決しようとする課題】
【0006】
上述のように、RFIDタグが添付された製品等の同定等のための検討以外に、製品等の位置を検索するシステムの検討が行なわれている。しかし、上述の位置検索システムでは、ユーザが情報端末等から製品名を入力する必要があったため、ユーザにとって煩雑な作業を要するシステムであった。さらに一般的には、ユーザは製品がいつどこに置かれていたかを覚えていても、その製品名を正確に思い出せない場合もある。このような場合、上述のような位置検索システムでは製品名を入力することができないため、まったく使用することができないという問題があった。
【0007】
そこで、本発明の目的は、上記問題を解決するためになされたものであり、ユーザにとって簡易に使用することができ、製品がいつどこに置かれていたかを覚えているがその製品名を正確に思い出せない場合であっても使用することができる製品の位置検索システム等を提供することにある。
【課題を解決するための手段】
【0008】
この発明の位置検索装置は、物体の現在位置を検索する位置検索装置であって、該位置検索装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置検索装置との間の距離を所定の方式に基づいて測定し、該位置検索装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部とを備え、前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段と、前記検索開始指示情報に基づき、前記位置センサを用いて前記位置検索装置の位置情報を算出する装置位置算出手段と、前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により取得された前記位置検索装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段と、前記装置位置算出手段により取得された前記位置検索装置の位置情報と、前記測定手段により測定された前記地点と該位置検索装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段と、前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報に照合する履歴を前記存在位置履歴記録部から検索する検索手段と、前記検索手段により検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記出力装置へ出力する出力手段とを備えたことを特徴とする。
【0009】
ここで、この発明の位置検索装置において、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器と、該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部とをさらに備え、前記検索手段により照合する履歴が検索されなかった場合、前記物体情報記録部に記録された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得する識別子取得手段と、前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、前記識別子取得手段により取得された識別子と前記識別子読取手段により読取られた物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報に対応する物体が存在することを前記出力装置に出力する通知手段とをさらに備えることができる。
【0010】
ここで、この発明の位置検索装置において、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置とすることができる。
ここで、この発明の位置検索装置において、前記出力装置は音声を用いて情報を出力する発話装置とすることができる。
【0011】
ここで、この発明の位置検索装置において、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置検索装置において、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なるものとすることができる。
ここで、この発明の位置検索装置において、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置検索装置において、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることができる。
ここで、この発明の位置検索装置において、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることができる。
【0012】
この発明の位置検索システムは、位置情報を取得する位置取得装置と、該位置取得装置とネットワークを介して接続されたサーバとを用いて物体の現在位置を検索する位置検索システムであって、前記位置取得装置は、該位置取得装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置取得装置との間の距離を所定の方式に基づいて測定し、該位置取得装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、情報を送受信する通信装置と、前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段と、前記検索開始指示情報に基づき、前記位置センサを用いて前記位置取得装置の位置情報を算出する装置位置算出手段と、前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により算出された前記位置取得装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段と、前記装置位置算出手段により算出された前記位置取得装置の位置情報と、前記測定手段により測定された前記地点と該位置取得装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段と、前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報を前記通信装置を介して前記サーバへ送信する送信手段と、前記サーバから前記通信装置を介して受信した物体の現在位置を前記出力装置へ出力する出力手段とを備え、前記サーバは、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部と、前記送信手段により送信された前記地点の位置情報及び前記時期情報に照合する履歴を前記存在位置履歴記録部から検索する検索手段と、前記検索手段により検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記位置取得装置へ送信する現在位置送信手段とを備えたことを特徴とする。
【0013】
ここで、この発明の位置検索システムにおいて、前記位置取得装置は物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器をさらに備え、前記サーバは該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部をさらに備えており、前記サーバは、前記検索手段により照合する履歴が検索されなかった場合、前記物体情報記録部に記録された各物体の製品情報を前記位置取得装置へ送信する製品情報送信手段と、前記位置取得装置から送信された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得する識別子取得手段と、前記識別子取得手段により取得された識別子と前記位置取得装置から送信された物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記位置取得装置から送信された物体の製品情報に対応する物体が存在することの通知情報を該位置検索装置に送信する通知情報送信手段とをさらに備え、前記位置取得装置は、前記製品情報送信手段により送信された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報を前記サーバへ送信する入力製品情報送信手段と、前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、前記識別子読取手段により読取られた物体の識別子を前記サーバへ送信する識別子送信手段と、前記通知情報送信手段により送信された通知情報を前記出力装置に出力する通知手段とをさらに備えることができる。
【0014】
ここで、この発明の位置検索システムにおいて、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であるものとすることができる。
ここで、この発明の位置検索システムにおいて、前記出力装置は音声を用いて情報を出力する発話装置であるものとすることができる。
【0015】
ここで、この発明の位置検索システムにおいて、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置検索システムにおいて、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なるものとすることができる。
ここで、この発明の位置検索システムにおいて、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置検索システムにおいて、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることができる。
ここで、この発明の位置検索システムにおいて、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることができる。
【0016】
この発明の位置取得装置は、物体の現在位置を検索する位置検索システムにおける該物体の位置情報を取得する位置取得装置であって、該位置取得装置はネットワークを介してサーバと接続されており、前記位置取得装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置取得装置との間の距離を所定の方式に基づいて測定し、該位置取得装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、該ネットワークを介して該サーバと情報を送受信する通信装置と、前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段と、前記検索開始指示情報に基づき、前記位置センサを用いて前記位置取得装置の位置情報を算出する装置位置算出手段と、前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により算出された前記位置取得装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段と、前記装置位置算出手段により算出された前記位置取得装置の位置情報と、前記測定手段により測定された前記地点と該位置取得装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段と、前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報を前記通信装置を介して前記サーバへ送信する送信手段と、前記サーバから前記通信装置を介して受信した物体の現在位置であって、前記サーバが、前記送信手段により送信された前記地点の位置情報及び前記時期情報に照合する履歴を物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部から検索し、検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記位置取得装置へ送信したものを、前記出力装置へ出力する出力手段とを備えたことを特徴とする。
【0017】
ここで、この発明の位置取得装置において、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器をさらに備え、前記サーバは該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部をさらに備えており、前記サーバが前記検索手段により照合する履歴が検索されなかった場合に前記位置取得装置へ送信する前記物体情報記録部に記録された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報を前記サーバへ送信する入力製品情報送信手段と、前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、前記識別子読取手段により読取られた物体の識別子を前記サーバへ送信する識別子送信手段と、前記サーバが、前記入力製品情報送信手段により送信された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得し、取得された識別子と前記識別子送信手段により送信された物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記入力製品情報送信手段により送信された物体の製品情報に対応する物体が存在することの通知情報であって該位置検索装置に送信したものを前記出力装置に出力する通知手段とをさらに備えることができる。
【0018】
ここで、この発明の位置取得装置において、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であるものとすることができる。
ここで、この発明の位置取得装置において、前記出力装置は音声を用いて情報を出力する発話装置であるものとすることができる。
【0019】
ここで、この発明の位置取得装置において、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置取得装置において、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なるものとすることができる。
ここで、この発明の位置取得装置において、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置取得装置において、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることができる。
ここで、この発明の位置取得装置において、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることができる。
【0020】
この発明の位置検索方法は、位置情報を取得する位置取得装置と、該位置取得装置とネットワークを介して接続されたサーバとを用いて物体の現在位置を検索する位置検索方法であって、前記位置取得装置は、該位置取得装置の位置情報を取得する位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置取得装置との間の距離を所定の方式に基づいて測定し、該位置取得装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、該ネットワークを介して該サーバと情報を送受信する通信装置とを備え、前記サーバは、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した前記存在位置履歴記録部を備えており、前記位置検索方法は、前記位置取得装置が、前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射ステップと、前記検索開始指示情報に基づき、前記位置センサを用いて前記位置検索装置の位置情報を算出する装置位置算出ステップと、前記測定装置に、前記光線放射ステップで前記照射光源から放射された光線が指示する地点と前記装置位置算出ステップで算出された前記位置取得装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定ステップと、前記装置位置算出ステップで算出された前記位置取得装置の位置情報と、前記測定ステップで測定された前記地点と該位置取得装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得ステップと、前記地点位置取得ステップで求められた前記地点の位置情報及び前記入力装置から入力された時期情報を前記通信装置を介して前記サーバへ送信する送信ステップと、前記サーバが、前記送信ステップで送信された前記地点の位置情報及び前記時期情報に照合する履歴を前記存在位置履歴記録部から検索する検索ステップと、前記検索ステップで検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記位置取得装置へ送信する現在位置送信ステップと、前記位置取得装置が、前記現在位置送信ステップでサーバから送信され前記通信装置を介して受信した物体の現在位置を前記出力装置へ出力する出力ステップとを備えたことを特徴とする。
【0021】
ここで、この発明の位置検索方法において、前記位置取得装置は物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器をさらに備え、前記サーバは該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部をさらに備えており、前記サーバが、前記検索ステップで照合する履歴が検索されなかった場合、前記物体情報記録部に記録された各物体の製品情報を前記位置取得装置へ送信する製品情報送信ステップと、前記位置取得装置が、前記製品情報送信ステップで送信された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力ステップと、前記製品情報出力ステップにおける促しに基づいて前記入力装置を用いて選択された物体の製品情報を前記サーバへ送信する入力製品情報送信ステップと、前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取ステップと、前記識別子読取ステップで読取られた物体の識別子を前記サーバへ送信する識別子送信ステップと、前記サーバが、前記入力製品情報送信ステップで送信された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得する識別子取得ステップと、前記識別子取得ステップで取得された識別子と前記識別子送信ステップで送信された物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記位置取得装置から送信された物体の製品情報に対応する物体が存在することの通知情報を該位置検索装置に送信する通知情報送信ステップと、前記位置取得装置が、前記通知情報送信ステップで送信された通知情報を前記出力装置に出力する通知ステップとをさらに備えることができる。
【0022】
ここで、この発明の位置検索方法において、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であるものとすることができる。
ここで、この発明の位置検索方法において、前記出力装置は音声を用いて情報を出力する発話装置であるものとすることができる。
【0023】
ここで、この発明の位置検索方法において、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置検索方法において、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なるものとすることができる。
ここで、この発明の位置検索方法において、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置検索方法において、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることができる。
ここで、この発明の位置検索方法において、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることができる。
【0024】
この発明の位置収集装置は、物体の現在位置を収集する位置収集装置であって、該位置収集装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された物体と該位置収集装置との間の距離を所定の方式に基づいて測定し、該位置検索装置から該物体への仰角及び所定の基準方角から該物体の方角への方位角を測定する測定装置と、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器と、現在時刻を計時するタイマと、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に前記識別子を用いて記録した存在位置履歴記録部とを備え、前記照射光源に光線を放射させる光線放射手段と、前記位置センサを用いて前記位置収集装置の位置情報を算出する装置位置算出手段と、前記測定装置に前記光線放射手段により前記照射光源から放射された光線が指示する物体と前記装置位置算出手段により算出された前記位置収集装置の位置との間の距離、該位置から該物体への仰角及び所定の基準方角から該物体の方角への方位角を測定させる測定手段と、前記装置位置算出手段により算出された前記位置収集装置の位置情報と、前記測定手段により測定された前記物体と該位置収集装置の前記位置との間の距離、前記位置から前記物体への仰角及び所定の基準方角から前記物体の方角への方位角とに基づき、該物体の位置情報を求める物体位置取得手段と、前記物体に付された無線自動識別タグから該物体の識別子を前記無線自動識別タグ読取器に読取らせる識別子読取手段と、前記識別子読取手段により読取られた前記物体の識別子に照合する識別子を前記存在位置履歴記録部から検索し、照合した識別子に対応する履歴を取得する履歴取得手段と、前記物体位置取得手段により求められた該物体の位置情報及び前記タイマにより計時された現在時刻に基づく時期情報を用いて、前記履歴取得手段により取得された前記履歴を更新する更新手段とをさらに備えたことを特徴とする。
【0025】
ここで、この発明の位置収集装置において、前記履歴取得手段により前記物体の識別子に照合する識別子が検索されなかった場合、前記識別子を用いて、前記物体位置取得手段により求められた該物体の位置情報及び前記タイマにより計時された現在時刻に基づく時期情報を前記物体の履歴として前記存在位置履歴記録部に追加する追加手段をさらに備えることができる。
【0026】
ここで、この発明の位置収集装置において、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置収集装置において、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なるものとすることができる。
ここで、この発明の位置収集装置において、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることができる。
ここで、この発明の位置収集装置において、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることができる。
ここで、この発明の位置収集装置において、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることができる。
【0027】
この発明の位置収集方法は、本発明のいずれかの位置収集装置を用いて物体の位置を収集することを特徴とする。
【0028】
この発明のプログラムは、物体の現在位置を位置検索装置を用いて検索するためのプログラムであって、該位置検索装置は、該位置検索装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置検索装置との間の距離を所定の方式に基づいて測定し、該位置検索装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部とを備えており、前記位置検索装置のコンピュータを、前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段、前記検索開始指示情報に基づき、前記位置センサを用いて前記位置検索装置の位置情報を算出する装置位置算出手段、前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により算出された前記位置検索装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段、前記装置位置算出手段により算出された前記位置検索装置の位置情報と、前記測定手段により測定された前記地点と該位置検索装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段、前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報に照合する履歴を前記存在位置履歴記録部から検索する検索手段、前記検索手段により検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記出力装置へ出力する出力手段として機能させるためのプログラムである。
【0029】
ここで、この発明のプログラムにおいて、前記位置検索装置は、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器と、該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部とをさらに備え、前記検索手段により照合する履歴が検索されなかった場合、前記物体情報記録部に記録された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得する識別子取得手段と、前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、前記識別子取得手段により取得された識別子と前記識別子読取手段により読取られた物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報に対応する物体が存在することを前記出力装置に出力する通知手段とをさらに備えることができる。
【0030】
この発明のプログラムは、物体の現在位置を検索する位置検索システムにおける該物体の位置情報を取得する位置取得装置で実行されるためのプログラムであって、該位置取得装置はネットワークを介してサーバと接続され、該位置取得装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置取得装置との間の距離を所定の方式に基づいて測定し、該位置検索装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、情報を送受信する通信装置とを有しており、該位置検索装置のコンピュータを、前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段、前記検索開始指示情報に基づき、前記位置センサを用いて前記位置取得装置の位置情報を算出する装置位置算出手段、前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により算出された前記位置取得装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段、前記装置位置算出手段により算出された前記位置取得装置の位置情報と、前記測定手段により測定された前記地点と該位置取得装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段、前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報を前記通信装置を介して前記サーバへ送信する送信手段、前記サーバから前記通信装置を介して受信した物体の現在位置であって、前記サーバが、前記送信手段により送信された前記地点の位置情報及び前記時期情報に照合する履歴を物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部から検索し、検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記位置取得装置へ送信したものを、前記出力装置へ出力する出力手段として機能させるためのプログラムである。
【0031】
ここで、この発明のプログラムにおいて、前記位置取得装置は前記物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器をさらに備え、前記サーバは該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部をさらに備えており、前記サーバが前記検索手段により照合する履歴が検索されなかった場合に前記位置取得装置へ送信する前記物体情報記録部に記録された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報を前記サーバへ送信する入力製品情報送信手段と、前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、前記識別子読取手段により読取られた物体の識別子を前記サーバへ送信する識別子送信手段と、前記サーバが、前記入力製品情報送信手段により送信された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得し、取得された識別子と前記識別子送信手段により送信された物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記入力製品情報送信手段により送信された物体の製品情報に対応する物体が存在することの通知情報であって該位置検索装置に送信したものを前記出力装置に出力する通知手段とをさらに備えることができる。
【0032】
ここで、この発明のプログラムにおいて、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であるものとすることができる。
ここで、この発明のプログラムにおいて、前記出力装置は音声を用いて情報を出力する発話装置であるものとすることができる。
【0033】
この発明のプログラムは、物体の現在位置を位置収集装置に収集させるためのプログラムであって、該位置収集装置は、該位置収集装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された物体と該位置収集装置との間の距離を所定の方式に基づいて測定し、該位置収集装置から該物体への仰角及び所定の基準方角から該物体の方角への方位角を測定する測定装置と、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器と、現在時刻を計時するタイマと、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に前記識別子を用いて記録した存在位置履歴記録部とを有しており、該位置収集装置のコンピュータを、前記照射光源に光線を放射させる光線放射手段、前記位置センサを用いて前記位置収集装置の位置情報を算出する装置位置算出手段、前記測定装置に前記光線放射手段により前記照射光源から放射された光線が指示する物体と前記装置位置算出手段により算出された前記位置収集装置の位置との間の距離、該位置から該物体への仰角及び所定の基準方角から該物体の方角への方位角を測定させる測定手段、前記装置位置算出手段により算出された前記位置収集装置の位置情報と、前記測定手段により測定された前記物体と該位置収集装置の前記位置との間の距離、前記位置から前記物体への仰角及び所定の基準方角から前記物体の方角への方位角とに基づき、該物体の位置情報を求める物体位置取得手段、前記物体に付された無線自動識別タグから該物体の識別子を前記無線自動識別タグ読取器に読取らせる識別子読取手段、前記識別子読取手段により読取られた前記物体の識別子に照合する識別子を前記存在位置履歴記録部から検索し、照合した識別子に対応する履歴を取得する履歴取得手段、前記物体位置取得手段により求められた該物体の位置情報及び前記タイマにより計時された現在時刻に基づく時期情報を用いて、前記履歴取得手段により取得された前記履歴を更新する更新手段として機能させるためのプログラムである。
【0034】
ここで、この発明のプログラムにおいて、前記履歴取得手段により前記物体の識別子に照合する識別子が検索されなかった場合、前記識別子を用いて、前記物体位置取得手段により求められた該物体の位置情報及び前記タイマにより計時された現在時刻に基づく時期情報を前記物体の履歴として前記存在位置履歴記録部に追加する追加手段をさらに備えることができる。
【0035】
ここで、この発明のプログラムにおいて、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることができる。
【0036】
ここで、この発明のプログラムにおいて、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なるものとすることができる。
ここで、この発明のプログラムにおいて、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることができる。
ここで、この発明のプログラムにおいて、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることができる。
ここで、この発明のプログラムにおいて、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることができる。
【0037】
この発明の記録媒体は、本発明のいずれかに記載のプログラムを記録したコンピュータ読取り可能な記録媒体である。
【発明の効果】
【0038】
本発明の位置検索システム等によれば、過去に物体が存在していたと思われる地点へ位置検索装置を向け、入力装置を押下することにより物体の現在位置の検索開始指示情報が入力される。当該検索開始指示情報の入力に基づき、光線放射部が照射光源に光線を放射させて上記地点を指示し、装置位置算出部が位置センサを用いて位置検索装置の位置情報を算出する。上記検索開始指示情報の入力に基づき、測定部が測定装置に対し、上記地点と上記位置情報により示される位置との間の距離および高度差を測定させる。地点位置取得部は、上記位置情報と距離と高度差とに基づき、上記地点の位置情報を求める。検索部は、上記地点の位置情報および入力された時期情報に照合する履歴を存在位置履歴記録部から検索する。出力部は、検索された履歴中で最新の時期情報に対応する位置情報を当該履歴に対応する物体の現在位置として出力装置へ出力する。この結果、ユーザにとって簡易に使用することができ、製品(物体)がいつどこに置かれていたかを覚えているが(すなわち時期情報と上記地点とを得られるが)、その製品名を正確に思い出せない場合であっても使用することができる製品の位置検索装置等を提供することができるという効果がある。
【発明を実施するための最良の形態】
【0039】
以下、各実施例について図面を参照して詳細に説明する。
【実施例1】
【0040】
図1は、本発明の実施例1における位置検索装置10を説明するための図である。図1において、符号10は物体OBJの現在位置を検索する位置検索装置、20は位置検索装置10の内部装置および機能等を示す内部構成であり、21は位置検索装置10のコンピュータが実行する機能を示す機能ブロックである。符号60は上段61、中段62および下段63を有する収納棚であり、中段62上に点線で薄く示された物体OBJは物体OBJが過去に中段62上に存在していたことを示す。収納棚60の有する段数は3段に限定されるものではない。図1に示されるようなX、YおよびZの3次元座標系を用いて、位置検索装置10の位置の3次元座標は(Xo、Yo、Zo)、物体OBJの(過去の)地点(位置A)(以下、「地点A」と略す。)の3次元座標は(Xa、Ya、Za)と示す。緯度および経度を用いて、位置検索装置10の位置の(緯度、経度)を(LAo、LOo)、物体OBJの(過去の)地点Aの(緯度、経度)を(LAa、LOa)と示すこともできる。
【0041】
図1において、符号11は位置検索装置10の位置情報を取得する位置センサである。位置センサ11としては例えば位置検索装置10の位置を測位するためのGPS(Global Positioning System)アンテナを用いることができる。あるいは位置センサ11としてUWB(Ultra Wide Band)アンテナを用いてもよい。UWB無線方式は、マイクロ波帯(3GHz〜30GHz)からミリ波帯(30GHz〜300GHz)に至る広帯域な周波数帯を使用し、1nsec以下のパルスを変調せずに送信する方式であり、距離分解能が非常に高い。いずれの場合も位置情報は地球上の位置の3次元座標(X、Y、Z)および/または(緯度、経度)とするが、以下では便宜上、3次元座標のみで説明する場合もある。
【0042】
符号12は光線70を放射する照射光源であり、図1に示されるように光線70により物体OBJの過去の地点A(3次元座標(Xa、Ya、Za))がポイント(指示)され、人間が地点Aを視認することができるようになっている。照射光源12から放射された光線70により指示された地点Aと位置検索装置10との間の距離(直線距離または斜距離)Rは種々の方式(所定の方式)に基づいて測定することができる。例えば、照射光源12から放射される光線70がレーザ光線である場合、所定の方式として当該レーザ光線70を利用することができる。照射光源12から放射されたレーザ光線70は地点Aをポイントして人間が視認できるようにすると共に、地点Aで反射して照射光源12の近傍に設けられた検知器(不図示)により検知される。レーザ光線70の往復時間を内蔵するクロック(不図示)で計測し、この往復時間(秒)とレーザ光線70の速度(m/秒)との積を2で割ることにより、照射光源12から放射されたレーザ光線70により指示された地点Aと位置検索装置10との間の距離(直線距離または斜距離)Rを測定することができる。
上述の距離Rを測定するための所定の方式として、照射光源12から放射される光線70を利用しない方式を用いることもできる。この場合、照射光源12から放射される光線70はポイントされた地点Aを人間が視認するためにのみ用いることになる。照射光源12が放射する光線70は所定値以下の細さのビームであってレーザ光線とは異なるものを用いればよい。例えば照射光源12として、豆球にニップル球等を用いたいわゆるポインタ型の光源を用いることができる。距離Rを測定する所定の方式として、測定装置10にレーザ光線を放射するレーザ光源(不図示)を別途設けておき、当該レーザ光源から放射されるレーザ光線を上述と同様に利用する方式を用いることができる。
距離Rを測定する所定の方式として、測定装置10に所定の音波を放射する音波源(不図示)を別途設けておき、当該音波源から放射される所定の音波を利用する方式を用いることもできる。この場合、いわゆるアクティブ・ソナー(能動型音波探知機)のように、当該音波源から所定の音波70(便宜的に光線70と同じ符号を用いる。)を放射し、地点Aで反響して戻ってきた音波を聴音装置(不図示)により受信する。音波70の往復時間を内蔵するクロックで計測し、この往復時間(秒)と音波70の速度(m/秒)との積を2で割ることにより、距離Rを求めることができる。所定の音波70としては超音波を用いることができるが、超音波は空中では水中と異なり伝播減衰が大きいため、20KHz〜200KHzの周波数帯を用いることが好適である。
距離Rを測定する所定の方式として、測定装置10に所定の電波を放射する電波源(不図示)を別途設けておき、当該電波源から放射される所定の電波を利用する方式を用いることもできる。この場合、電波を使用したいわゆるレベル計のように、当該電波源から所定の電波70(便宜的に光線70と同じ符号を用いる。)を放射し、地点Aで反射して戻ってきた電波70を受信装置(不図示)により受信する。電波70の往復時間を内蔵するクロックで計測し、この往復時間(秒)と電波70の速度(m/秒)との積を2で割ることにより、距離Rを求めることができる。所定の電波70としてはミリ波を用いることが好適であり、周波数変調連続(Frequency Modulated Continuous Wave : FMCW)方式の変調を用いたいわゆるFMCW方式ミリ波レーダと同様にして距離Rを求めることができる。マイクロ波を用いたFMCW方式レーダを用いてもよい。
測定装置13は傾斜計(例えば電気式傾斜計等)とコンパス(地磁気センサ)とを内蔵した通常のレーザ距離計を用いることにより、位置検索装置10から地点Aへの仰角θと所定の基準方角N(例えば真北の方角)から地点Aの方角への方位角αを測定することができる。仰角θは傾斜計の替わりにジャイロを用いて測定してもよい。方位角αは、ホール効果または磁気抵抗効果を応用した半導体素子を地磁気センサとして用いることにより測定することができる。光ファイバを用いた磁気検出器を利用してもよい。この場合、メタルコートされた光ファイバをコイル形状にしたセンシングコイルに交流電流を流すと、電流と地磁気による磁束密度とにより生じるローレンツ力によって光ファイバが伸縮する。この結果、別途用意した参照用の光ファイバコイルを通る光と上記センシングコイルを通る光との間で位相にずれが生じるため、両コイルからの光を合波した出力光強度が変化する。従って、この出力光強度をモニターすることにより地磁気を検出することができる。地磁気の検出は上述の地磁気センサのように絶対方位を求めるタイプのものではなく、ジャイロのように相対的な方位を求めるタイプのものを利用してもよい。以上により、距離R、仰角θおよび方位角αを測定することができる。距離Rと仰角θとから高度差Hおよび水平距離Dを得ることができる。
【0043】
符号14および16は情報を入力するテンキー等の入力装置である(後述の図6参照)。特に入力装置16は照射光源12から光線70を照射するための指示ボタン(ポインタ・ボタン)として用いることができる。符号15は情報を出力する液晶ディスプレイ等の出力装置である。出力装置15をタッチパネルとし、入力装置14等として用いることもできる。
【0044】
内部構成20内に示される存在位置履歴記録部40は、物体OBJの位置情報(Xa、Ya、Za)および物体OBJがその位置情報(Xa、Ya、Za)により示される地点Aに存在した時期情報の履歴を物体毎に記録している。時期情報の形式は例えば西暦年をyyyyとし、月をmmとし、日をddとすると、(yyyy.mm.dd)のように表すことができる。例えば、2004年5月10日であれば(2004.05.10)のように表すことができる。
【0045】
次に、位置検索装置10のコンピュータが実行する機能について説明する。機能ブロック21内に示されるように、光線放射部(光線放射手段)22は、入力装置16等から入力された物体OBJの現在位置の検索開始指示情報に基づき、照射光源12に光線70を放射させる。装置位置算出部(装置位置算出手段)23は、上記検索開始指示情報に基づき、位置センサ11を用いて位置検索装置10の位置情報(Xo、Yo、Zo)を算出する。位置センサ11としてGPSアンテナを用いる場合、3次元座標(Xo、Yo、Zo)を得るためにはGPSにおける4個の衛星からの受信が必要となるが、3個の衛星からの受信しか得られない場合は、高度Zoを含まない2次元座標(Xo、Yo)となる。このような場合には予め位置検索装置10を人間が所定の高度(例えば1m)に持って使用するものと想定し、3次元座標(Xo、Yo、1m)とすればよい。位置センサ11としてUWBアンテナを用いる場合、収納棚60が設置された室内等に設けられた3つのUWB基地局と位置検索装置10との間でUWB通信を行って各基地局との間の距離を算出することにより、位置検索装置10の位置情報として3次元座標(Xo、Yo、Zo)を特定することができる。
【0046】
測定部(測定手段)24は、上記検索開始指示情報に基づき、測定装置13に対し、光線放射部22により照射光源12から放射された光線70が指示する地点Aと装置位置算出部23により算出された位置検索装置10の位置情報(Xo、Yo、Zo)により示される位置との間の距離R、当該位置情報(Xo、Yo、Zo)により示される位置から地点Aへの仰角θおよび所定の基準方角N(例えば真北)から地点Aへの方位角αを測定させる。地点位置取得部(地点位置取得手段)25は、装置位置算出部23により算出された位置検索装置10の位置情報(Xo、Yo、Zo)と、測定部24により測定された地点Aと位置検索装置10の位置との間の距離R、当該位置情報(Xo、Yo、Zo)により示される位置から地点Aへの仰角θおよび所定の基準方角N(例えば真北)から地点Aへの方位角αとに基づき、地点Aの位置情報(Xa、Ya、Za)を求める。ZaはZoと高度差Hとを用い、XaおよびYaは(Xo、Yo)または(緯度LAo、経度LOo)と基準方角N(例えば真北)から地点Aへの方位角αおよび水平距離Dとを用いることにより求めることができる。例えば、(Xa、Ya、Za)=(Xo−D、Yo、Zo+H)となる。検索部(検索手段)26は、地点位置取得部25により求められた地点Aの位置情報(Xa、Ya、Za)および入力装置14から入力された時期情報に照合する履歴を存在位置履歴記録部40から検索する。時期情報の入力は、例えば2004年5月10日であればテンキー等の入力装置14から「2,0,0,4,0,5,1,0」と入力すればよい。検索についての具体例は後述する。出力部(出力手段)27は、検索部26により検索された履歴中で最新の時期情報に対応する位置情報(X、Y、Z)を当該履歴に対応する物体OBJの現在位置として出力装置15へ出力する。
【0047】
図2(A)は本発明の実施例1における存在位置履歴記録部40の構成例を示す。図2(A)に示されるように、存在位置履歴記録部40は物体を識別可能な識別子(物体ID)を有する物体ID欄41と、物体ID欄41により示される物体IDを有する物体の位置情報および時期情報の履歴を有する履歴欄42とを有する表構造により実現することができる。ある時点tにおける位置情報および時期情報を各々位置情報tおよび時期情報tとすると、履歴は例えば((位置情報t、時期情報t)、(位置情報t−1、時期情報t−1)、...、(位置情報t−n、時期情報t−n))のようなリスト構造により実現することができる。あるいは後入れ先出しのスタック構造であってもよい。例えば図2(A)に示されるように、物体ID欄41がHMR−01の行40aでは履歴欄42は(((X1、Y1、Z1)、(2004.05.10))、((X2、Y2、Z2)、(2004.04.30)))のようになる。これは、物体IDがHMR−01である物体は、2004年4月30日に位置情報(X2、Y2、Z2)で示される位置にいたが、2004年5月10日には位置情報(X1、Y1、Z1)で示される位置に移動したことを示す。物体ID欄41がHMR−02の行40bでは履歴欄42は(((X3、Y3、Z3)、(2004.03.10)))のようになる。これは、物体IDがHMR−02である物体は、2004年3月10日に位置情報(X3、Y3、Z3)で示される位置にいたことを示す。物体ID欄41がPIN−03の行40mでは履歴欄42は(((X4、Y4、Z4)、(2004.04.15))、((X5、Y5、Z5)、(2004.03.15)))のようになる。これは、物体IDがPIN−03である物体は、2004年3月15日に位置情報(X5、Y5、Z5)で示される位置にいたが、2004年4月15日には位置情報(X4、Y4、Z4)で示される位置に移動したことを示す。上述の説明では履歴欄42の履歴中で最新の時期情報tほどリスト中の先頭に記録した。これは履歴が通常のリスト構造または後入れ先出しのスタック構造であるため、出力部27が最新の時期情報を効率よく取り出すことができるようにしたためである。従って、履歴を別の構造、例えば配列構造とした場合は、最新の時期情報ほど(配列の添字上)後の方に記録してもよい。
【0048】
上述の説明では位置情報を3次元座標(X、Y、Z)により表した。しかし、出力部27が位置情報(X、Y、Z)をそのまま物体OBJの現在位置として出力装置15へ出力した場合、位置検索装置10を使用するユーザにとって当該現在位置は直感的には理解しにくいものと考えられる。このため、位置情報(X、Y、Z)をユーザにとって直感的に理解しやすい位置名称へ変換した後、当該位置名称を位置情報(X、Y、Z)と共に出力してもよい。あるいは当該位置名称を位置情報として扱って当該位置名称のみを出力することもできる。図2(B)は位置情報と位置名称との変換テーブル45を示す。変換テーブル45は存在位置履歴記録部40と同じ記録装置上に設けておくことができる。図2(B)に示されるように、変換テーブル45は位置情報欄46と対応する位置の名称を示す位置名称欄47とを有する表構造により実現することができる。例えば、位置情報欄46が(X1、Y1、Z1)の行45aでは、位置名称欄47は「工具箱の中」となる。位置情報欄46が(X2、Y2、Z2)の行45bでは、位置名称欄47は「収納棚の上から2段目(または中段)中央」となり、位置情報欄46が(X4、Y4、Z4)の行45jでは、位置名称欄47は「作業机の引出の中」となり、位置情報欄46が(X5、Y5、Z5)の行45kでは、位置名称欄47は「作業机の上中央」となる。変換テーブル45を用いることにより、出力部27は位置情報(X1、Y1、Z1)等をそのまま物体OBJの現在位置として出力装置15へ出力せずに、位置情報(X1、Y1、Z1)と共に「工具箱の中」を出力したり、あるいは「工具箱の中」のみを出力することができる。
【0049】
図3は、本発明の実施例1における位置検索装置10のコンピュータが実行するプログラムの流れをフローチャートで示す。以下では説明の便宜上、物体OBJの地点を位置Pとし、地点(位置P)(以下、単に「地点P」という。)の3次元座標を(X2、Y2、Z2)とし、入力装置14から入力される時期情報を(2004.04.30)とする。図3に示されるように、まず、入力装置16等から物体OBJの現在位置の検索開始指示情報が入力されると(ステップS10)、光線放射部22は照射光源12に光線70を放射させる(ステップS12)。次に、装置位置算出部23は上記検索開始指示情報に基づき、位置センサ11を用いて位置検索装置10の位置情報(Xo、Yo、Zo)を算出する(ステップS14)。以上のステップS12およびS14は、ステップS10で検索開始指示情報が入力され次第、並行して実行することもできる。続いて、測定部24は測定装置13に対し、光線放射部22により照射光源12から放射された光線70が指示する地点Pと装置位置算出部23により算出された位置検索装置10の位置情報(Xo、Yo、Zo)により示される位置との間の距離R、当該位置情報(Xo、Yo、Zo)により示される位置から地点Pへの仰角θおよび所定の基準方角N(例えば真北)から地点Pへの方位角αを測定させる(ステップS16)。
【0050】
地点位置取得部25は、装置位置算出部23により算出された位置検索装置10の位置情報(Xo、Yo、Zo)と、測定部24により測定された地点Pと位置検索装置10の位置との間の距離R、当該位置情報(Xo、Yo、Zo)により示される位置から地点Pへの仰角θおよび所定の基準方角N(例えば真北)から地点Pへの方位角αとに基づき、地点Pの位置情報(X2、Y2、Z2)を求める(ステップS18)。検索部26は、地点位置取得部25により求められた地点Pの位置情報(X2、Y2、Z2)およびテンキー等の入力装置14等から入力された時期情報(2004.04.30)に照合する履歴を存在位置履歴記録部40から検索する(ステップS20)。具体的には、検索部26は存在位置履歴記録部40の履歴欄42中で((X2、Y2、Z2)、(2004.04.30))に照合する履歴を検索し、行40a中の履歴欄42の内容(((X1、Y1、Z1)、(2004.05.10))、((X2、Y2、Z2)、(2004.04.30)))を得る。出力部27は、検索部26により検索された履歴中で最新の時期情報に対応する位置情報(X、Y、Z)を当該履歴に対応する物体OBJの現在位置として出力装置15へ出力する(ステップ22)。具体的には、出力部27は検索部26により検索された履歴(((X1、Y1、Z1)、(2004.05.10))、((X2、Y2、Z2)、(2004.04.30)))中で最新の時期情報(2004.05.10)に対応する位置情報(X1、Y1、Z1)を当該履歴に対応する物体(物体ID=HMR−01)の現在位置として出力装置15へ出力する。この際、上述のように出力装置15に位置情報(X1、Y1、Z1)だけではなく、変換テーブル45を用いて変換された位置名称欄47の内容「工具箱の中」と共に出力することができる。さらに、過去の位置情報(X2、Y2、Z2)および時期情報(2004.04.30)も合わせて出力してもよい。例えば、「物体OBJ(物体ID=HMR−01)は2004年4月30日(過去の時期情報(2004.04.30))には収納棚の上から2段目中央(過去の位置情報(X2、Y2、Z2))にあったが、2004年5月10日(最新の時期情報(2004.05.10))には工具箱の中(最新の位置情報(X1、Y1、Z1))にある。」等のように出力することもできる。物体IDと物体名称とを対応付けた別の変換テーブル(後述の図5参照)を用いて、「物体OBJ(物体ID=HMR−01)は...」と出力する替わりに「木槌(大)(物体ID=HMR−01)は...」と出力させてもよい。
【0051】
以上より、本発明の実施例1によれば、位置検索装置10を過去に物体OBJ(例:物体ID=HMR−01)が存在していたと思われる位置(例:地点P)へ向け、入力装置16等を押下することにより、物体OBJの現在位置の検索開始指示情報が入力される。当該検索開始指示情報の入力に基づき、光線放射部22が照射光源12に光線70を放射させ、光線70は地点Pを指示し、装置位置算出部23が位置センサ11を用いて位置検索装置10の位置情報(Xo、Yo、Zo)を算出する。上記検索開始指示情報の入力に基づき、測定部24が測定装置13に対し、光線放射部22により照射光源12から放射された光線70が指示する地点Pと装置位置算出部23により算出された位置検索装置10の位置情報(Xo、Yo、Zo)により示される位置との間の距離R、当該位置情報(Xo、Yo、Zo)により示される位置から地点Pへの仰角θおよび所定の基準方角N(例えば真北)から地点Pへの方位角αを測定させる。地点位置取得部25は、装置位置算出部23により算出された位置検索装置10の位置情報(Xo、Yo、Zo)と、測定部24により測定された地点Pと位置検索装置10の位置との間の距離R、当該位置情報(Xo、Yo、Zo)により示される位置から地点Pへの仰角θおよび所定の基準方角N(例えば真北)から地点Pへの方位角αとに基づき、地点Pの位置情報(X2、Y2、Z2)を求める。検索部26は、地点位置取得部25により求められた地点Pの位置情報(X2、Y2、Z2)および入力装置14等のテンキーから入力された時期情報(2004.04.30)に照合する履歴を存在位置履歴記録部40から検索する。出力部27は、検索部26により検索された履歴中で最新の時期情報に対応する位置情報(X、Y、Z)を当該履歴に対応する物体OBJの現在位置として出力装置15へ出力する。この結果、位置検索装置10を物体OBJが過去に存在していたと思われる地点へ向けて入力装置16等を押下し、物体OBJが当該地点に存在していたと思われる時期情報を入力装置14等から入力するだけで、物体OBJが現在存在している地点の位置情報を位置検索装置10の出力装置15に出力させることができる。従って、ユーザにとって簡易に使用することができ、製品(物体OBJ)がいつどこに置かれていたかを覚えているがその製品名を正確に思い出せない場合であっても使用することができる製品の位置検索装置10等を提供することができる。
【実施例2】
【0052】
実施例1では、検索部26が地点位置取得部25により求められた地点の位置情報および入力装置14から入力された時期情報に照合する履歴を存在位置履歴記録部40から検索できた場合について説明した。本実施例2では、検索部26により照合する履歴が検索されなかった場合、すなわち存在位置履歴記録部40の履歴欄42の内容に上記位置情報および上記時期情報がなかった場合の処理について説明する。
【0053】
検索部26により照合する履歴が検索された場合は、当該履歴に対応する物体ID欄41の物体IDを得ることができる。しかし、照合する履歴が検索されなかった場合は物体IDを得ることができず、ユーザは探そうとしている製品(物体)の名称を元々正確に思い出せない状態である。そこで、実施例2では位置検索装置10側が記録している物体に関する情報をユーザ側へ提供し、ユーザ側にそれらの情報から探そうとしている製品を選択させ、当該選択に基づき物体IDを取得し、位置検索装置10に新たに設けられたRFIDリーダを用いて当該物体IDに等しいRFIDタグを付けている物体を探すという処理を行う。この結果、ユーザは探そうとしている製品の位置を知ることができる。
【0054】
図4は、本発明の実施例2における位置検索装置10を説明するための図である。図4で図1と同じ符号を付した箇所は同じ要素または同じ機能を有するため、説明は省略する。図4において、符号65は収納棚60の上段に置かれた物体、66は物体65に付された物体65を識別する識別子が記録されたRFIDタグ、17は位置検索装置10に新たに設けられた、物体65等に付されたRFIDタグ66から物体ID(識別子)を読取るRFIDリーダ、MはRFIDリーダから物体65を指すベクトル、75はRFIDリーダ17とRFIDタグ66との間で伝送される電波、18aおよび18bは位置検索装置10の別の入力装置である。実施例2ではRFIDタグ66を便宜上パッシブ型として説明する。従って、RFIDタグ66はRFIDリーダ17から非接触電力伝送により電波を受け取り、そのエネルギにより送受信を行なう。しかし、RFIDタグ66がアクティブ型であってもよいことは勿論である。
【0055】
次に、実施例2の位置検索装置10の内部構成20および機能ブロック21について説明する。図4に示されるように、実施例2の内部構成20には物体ID(識別子)と当該物体IDに対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部50(詳細は後述)が新たに設けられている。実施例2の機能ブロック21には、検索部26により照合する履歴が検索されなかった場合のために、製品情報出力部(製品情報出力手段)30、識別子取得部(識別子取得手段)31、識別子読取部(識別子読取手段)32および通知部(通知手段)33が新たに設けられている。
【0056】
製品情報出力部30は、物体情報記録部50に記録された各物体の製品情報を出力装置15に出力し、物体の製品情報の選択を促す出力を行なう。識別子取得部31は、製品情報出力部30による促しに基づいて、ユーザにより入力装置14等を用いて選択された物体の製品情報に対応する物体の識別子(物体ID1)を物体情報記録部50から取得する。識別子読取部32は、RFIDリーダ17に、RFIDリーダ17が向けられた方向(ベクトルMの方向)の物体65に付されたRFIDタグ66から物体65の識別子(物体ID2)を読取らせる。通知部33は、識別子取得部31により取得された識別子(物体ID1)と識別子読取部32により読取られた物体の識別子(物体ID2)とが一致する場合、RFIDリーダ17が向けられた方向(ベクトルMの方向)に、製品情報出力部30による促しに基づいてユーザにより入力装置14等を用いて選択された物体の製品情報に対応する物体65が存在することを出力装置15に出力する。この結果、ユーザは探そうとしている製品、すなわち入力装置14等を用いて選択した物体の製品情報に対応する物体の位置は、RFIDリーダ17が向けられた方向(ベクトルMの方向)に存在することを知ることができる。
【0057】
次に、物体情報記録部50の構成例について説明する。図5は、物体情報記録部50の構成例を示す。図5で図2(A)と同じ符号を付した箇所は同じ要素を示すため説明は省略する。図5に示されるように、物体情報記録部50は物体ID欄41と当該物体ID欄41により示される物体の名称を含む物体の製品情報とを記録した表構造により実現することができる。物体の製品情報としては、物体ID欄41により示される物体の名称を示す物体名称欄51と、物体ID欄41により示される物体のシリアル番号(製造番号)を示すシリアル番号欄52と、物体ID欄41により示される物体の製造年月日を示す製造年月日欄53とを有している。例えば、物体ID欄41がHMR−01の行50aでは、対応する物体名称欄51の内容は「木槌(大)」(大型の木槌を示す。)であり、シリアル番号欄52の内容は「ABC005」であり、製造年月日欄53は「2004.01.15」(2004年1月15日製造を示す。)である。同様に、物体ID欄41がHMR−02の行50bでは、対応する物体名称欄51の内容は「木槌(中)」(中型の木槌を示す。)であり、シリアル番号欄52の内容は「ABC009」であり、製造年月日欄53は「2004.02.03」(2004年2月3日製造を示す。)である。物体ID欄41がPIN−03の行50mでは、対応する物体名称欄51の内容は「釘抜き(小」(小型の釘抜きを示す。)であり、シリアル番号欄52の内容は「WXY005」であり、製造年月日欄53は「2003.10.15」(2003年10月15日製造を示す。)である。図5では図面の都合上、物体名称欄51、シリアル番号欄52および製造年月日欄53の3種類のみ示しているが、物体ID欄41により示される物体を同定する上で用いることが可能な製品情報であればさらに他の製品情報(例えば物体の色、形状、購入年月日、購入店等)も付加することができる。例えば物体名称欄51の内容は「木槌」等のみとし、別途形状欄を設けてそこに「大」、「中」、「小」等を記録するようにしてもよい。
【0058】
図6は、本発明の実施例2において、製品情報出力部30が出力装置15に出力する物体情報記録部50に記録された各物体の製品情報の例を示す。図6において、図4と同じ符号を付した箇所は同じ要素を示すため説明は省略する。図6で入力装置14はテンキー等として示されており、上述の時期情報はこのテンキー等を用いて入力することができる。図6に示されるように、製品情報出力部30は出力装置15に物体情報記録部50に記録された各物体の物体名称欄51、シリアル番号欄52および製造年月日欄53の内容を出力(表示)する。その際、「製品を選択して下さい。」という選択を促すメッセージ6の表示を行なう。図6では物体名称欄51が製品名称欄51aとして表示されているが、物体情報記録部50の各名称欄51等は内部的なものであるため、出力装置15に出力する際には適宜別の名称として表示してもよい。出力装置15に表示された第1行目は物体情報記録部50の行50aに相当し、第2行目は行50bに相当する。製品名欄51aの第2行目「木槌(中)」は反転表示されており、これはユーザによる選択に用いられるカーソル8が置かれている状態を示す。入力装置18aを上下に押下することにより、カーソル8を出力装置15に表示された製品名称欄51a等の各欄の上下に移動させることができる。さらに入力装置18bを左右に押下することにより、カーソル8を出力装置15に表示された行50a等の各行の左右に移動させることができる。上記メッセージ6に基づいてユーザが所望の位置にカーソル8を置いた後、入力装置14または16等を押下すると、その時カーソル8が置かれた行50a等に対応する物体(物体ID=HMR−01等)の製品情報の選択が行なわれる。すなわち、製品情報の選択にカーソル8は必ずしも製品名欄51aに置かれている必要はなく、他のシリアル番号欄52等に置かれた状態であってもカーソル8が置かれた行50a等に対応する物体(物体ID=HMR−01等)の製品情報の選択が行なわれる。上述のように、種々の製品情報(例えば物体の色、形状、購入年月日、購入店等)も付加することができるため、ユーザは製品名を明確に覚えていない場合であっても、出力装置15に表示された他の上記製品情報の欄内における任意の行にカーソル8を置くことにより製品情報の選択を行なうことができる。識別子取得部31は、以上のようにして選択された物体の製品情報に対応する物体の識別子(物体ID1)を物体情報記録部50から取得することができる。
【0059】
図7は、本発明の実施例2における位置検索装置10のコンピュータが実行するプログラムの流れをフローチャートで示す。図7で図3と同じステップS番号を付した処理ブロックは同じ処理を行うため説明は省略する。図7に示されるように、ステップS10からS20までは図3のフローチャートにより示される処理と同様に実行されるため、省略して1つの処理ブロック(S10〜S20)で示す。図7に示されるフローチャートにおいても図3のフローチャートと同様に、物体OBJの地点をPとし、地点Pの3次元座標を(X2、Y2、Z2)とし、入力装置14から入力される時期情報を(2004.04.30)とする。検索部26により照合する履歴が検索された場合(ステップS30)、図3のステップS22と同じ処理を行って終了する(ステップS22)。一方、検索部26により照合する履歴が検索されなかった場合(ステップS30)、製品情報出力部30は、物体情報記録部50に記録された各物体の製品情報を出力装置15に出力し、物体の製品情報の選択を促す出力を行なう(ステップS32)。識別子取得部31は、製品情報出力部30による促しに基づいて、ユーザにより入力装置14等を用いて選択された物体の製品情報に対応する物体の識別子(物体ID1)を物体情報記録部50から取得する(ステップS34)。識別子読取部32は、RFIDリーダ17に、RFIDリーダ17が向けられた方向(ベクトルMの方向)の物体65に付されたRFIDタグ66から物体65の識別子(物体ID2)を読取らせる(ステップS36)。通知部33は、識別子取得部31により取得された識別子(物体ID1)と識別子読取部32により読取られた物体の識別子(物体ID2)とが一致する場合(ステップS38)、RFIDリーダ17が向けられた方向(ベクトルMの方向)に、製品情報出力部30による促しに基づいてユーザにより入力装置14等を用いて選択された物体の製品情報に対応する物体65が存在することを出力装置15に出力する(ステップS40)。図7に示されるように、ステップS38で物体ID1と物体ID2とが一致しなかった場合、そのまま終了することもできるし、ステップS36へ戻って処理を繰り返すこともできる。すなわち、識別子取得部31により取得された物体ID1と一致する物体ID2が見つかるまでRFIDリーダ17の方向(ベクトルMの方向)を変化させていくこともできる。
【0060】
以上より、本発明の実施例2によれば、検索部26により照合する履歴が検索されなかった場合、製品情報出力部30は、物体情報記録部50に記録された各物体の製品情報を出力装置15に出力し、物体の製品情報の選択を促す出力を行なう。識別子取得部31は、製品情報出力部30による促しに基づいて、ユーザにより入力装置14等を用いて選択された物体の製品情報に対応する物体の識別子(物体ID1)を物体情報記録部50から取得する。識別子読取部32は、RFIDリーダ17に、RFIDリーダ17が向けられた方向(ベクトルMの方向)の物体65に付されたRFIDタグ66から物体65の識別子(物体ID2)を読取らせる。通知部33は、識別子取得部31により取得された識別子(物体ID1)と識別子読取部32により読取られた物体の識別子(物体ID2)とが一致する場合、RFIDリーダが向けられた方向(ベクトルMの方向)に、製品情報出力部30による促しに基づいてユーザにより入力装置14等を用いて選択された物体の製品情報に対応する物体65が存在することを出力装置15に出力する。この結果、ユーザは探そうとしている製品、すなわち入力装置14等を用いて選択した物体の製品情報に対応する物体の位置がRFIDリーダ17が向けられた方向(ベクトルMの方向)に存在することを知ることができる。従って、ユーザにとって簡易に使用することができ、製品がいつどこに置かれていたかを覚えているがその製品名を正確に思い出せない場合であっても使用することができる製品の位置検索装置10等を提供することができる。
【実施例3】
【0061】
上述の実施例1または2の位置検索装置10において、入力装置14等はユーザ等の人の発話した音声情報を入力して認識を行なう音声認識装置(不図示)とすることもできる。例えば、物体OBJの現在位置の検索開始指示情報、照射光源12から光線70を照射するための指示等、時期情報および物体の製品情報の選択等は、ユーザ等の発話による音声情報により入力することもできる。音声認識装置としては、入力した音声データから特徴抽出を行なって音声認識を行なう通常の音声認識エンジンを用いることができる。この結果、ユーザはキー入力等を行なわずに済むため、さらに簡易に使用することができる製品の位置検索装置10等を提供することができる。
【実施例4】
【0062】
上述の実施例1ないし3のいずれかの位置検索装置10において、出力装置15は音声を用いて情報を出力する発話装置(不図示)とすることもできる。例えば、検索部26により検索された履歴中で最新の時期情報に対応する位置情報(X、Y、Z)を当該履歴に対応する物体OBJの現在位置として出力すること、物体情報記録部50に記録された各物体の製品情報の出力、物体の製品情報の選択を促す出力、RFIDリーダ17が向けられた方向(ベクトルMの方向)に、製品情報出力部30による促しに基づいてユーザにより選択された物体の製品情報に対応する物体65が存在することの出力等は、発話装置からの音声情報により出力することもできる。発話装置としては、予め録音してある音声データに必要な音声データを合成する通常の音声合成装置を用いることができる。この結果、ユーザは液晶ディスプレイ等を見なくても出力結果を得ることができるため、さらに簡易に使用することができる製品の位置検索装置10等を提供することができる。
【実施例5】
【0063】
上述の実施例1ないし4では、存在位置履歴記録部40は位置検索装置10内に設けられているものとして説明した。本実施例5では、ホームネットワーク等経由で接続されたホームサーバ等の外部のデータベースに存在位置履歴記録部40等が設置されている場合について説明する。
【0064】
図8は、本発明の実施例5における位置検索システム1を示す。図8で図1と同じ符号を付した箇所は同じ要素または同じ機能を有するため、説明は省略する。図8において、符号80は位置情報を取得する位置取得装置、85はホームネットワークまたはインターネット等のネットワーク77を介してホームサーバまたはウェブサーバ等のサーバ90と情報を送受信する通信装置、81は位置取得装置80の内部装置および機能等を示す内部構成であり、82は位置取得装置80のコンピュータが実行する機能を示す機能ブロックである。符号90はネットワーク77を介して位置取得装置80と情報を送受信するサーバ、91はサーバ90の内部装置および機能等を示す内部構成であり、92はサーバ90のコンピュータが実行する機能を示す機能ブロックである。図8に示されるように、位置検索システム1は位置取得装置80とネットワーク77を介して接続されたサーバ90とにより構成される。以下、位置検索システム1の有する位置取得装置80およびサーバ90のコンピュータが実行する機能について、図1に示される位置検索装置10のコンピュータが実行する機能との相違を中心に説明する。
【0065】
図8の機能ブロック82内に示されるように、光線放射部22から地点位置取得部25までは位置検索装置10と同様の機能であるため説明は省略する。図8の機能ブロック82内に示される送信部(送信手段)83は、地点位置取得部25により求められた地点Aの位置情報(Xa、Ya、Za)および入力装置14等から入力された時期情報(yyyy.mm.dd)を通信装置85を介してサーバ90へ送信する。出力部(出力手段)84は、サーバ90から通信装置85を介して受信した物体OBJの現在位置を出力装置15へ出力する。
【0066】
一方、サーバ90は、図8の内部構成91内に示されるように存在位置履歴記録部40を備えている。図8の機能ブロック92内に示されるように、検索部(検索手段)93は位置取得装置80の送信部83により送信された地点Aの位置情報(Xa、Ya、Za)および時期情報(yyyy.mm.dd)に照合する履歴を存在位置履歴記録部40から検索する。現在位置送信部(現在位置送信手段)94は、検索部93により検索された履歴中で最新の時期情報に対応する位置情報を当該履歴に対応する物体の現在位置として位置取得装置80へ送信する。以上のように、実施例5ではサーバ90側に存在位置履歴記録部40を設置し、検索部93の機能を負担させることができる。
【0067】
図9は、本発明の実施例5における位置検索システム1の位置取得装置80のコンピュータとサーバ90のコンピュータとが実行するプログラムの流れをフローチャートで示す。図9で図3と同じステップS番号を付した処理ブロックは同じ処理を行うため説明は省略する。図9に示されるフローチャートにおいても図3のフローチャートと同様に、物体OBJの地点をPとし、地点Pの3次元座標を(X2、Y2、Z2)とし、入力装置14から入力される時期情報を(2004.04.30)とする。図9において左側のフローチャートは位置取得装置80の処理の流れを示し、右側のフローチャートはサーバ90の処理の流れを示し、位置取得装置80とサーバ90との間の通信は両フローチャート間の点線により示す。
【0068】
図9に示されるように、位置取得装置80側では、ステップS10から、光線放射ステップ(ステップS12)、装置位置算出ステップ(ステップS14)、測定ステップ(ステップS16)、地点位置取得ステップ(ステップS18)まで図3のフローチャートと同様の処理を行う。光線放射ステップ(ステップS12)および装置位置算出ステップ(ステップS14)は、ステップS10で検索開始指示情報が入力され次第、並行して実行することもできる。次に、地点位置取得ステップ(ステップS18)で求められた地点Pの位置情報(X2、Y2、Z2)および入力装置14等から入力された時期情報(2004.04.30)を通信装置85を介してサーバ90へ送信する(送信ステップ。ステップS50)。
【0069】
サーバ90は、送信ステップ(ステップS50)で送信された地点Pの位置情報(X2、Y2、Z2)および時期情報(2004.04.30)に照合する履歴を存在位置履歴記録部40の履歴欄42から検索する(検索ステップ。ステップS52)。続いて、検索ステップ(ステップS54)で検索された履歴中で最新の時期情報(2004.05.10)に対応する位置情報(X1、Y1、Z1)を当該履歴に対応する物体の現在位置として位置取得装置80へ送信する(現在位置送信ステップ。ステップS54)。
【0070】
位置取得装置80は、現在位置送信ステップ(ステップS54)でサーバ90から送信され通信装置85を介して受信した物体の現在位置を出力装置15へ出力する(出力ステップ。ステップS56)。上述のように、現在位置は位置情報(X1、Y1、Z1)および/または位置名称とすることができる。
【0071】
以上より、本発明の実施例5によれば、ネットワーク77経由で接続されたサーバ90側に存在位置履歴記録部40等がある場合にも、通信装置85を備えた位置取得装置80を用いることにより、実施例1等と同様の効果を奏することができる。すなわち、位置取得装置80を過去に物体OBJ(例:物体ID=HMR−01)が存在していたと思われる位置(例:地点P)へ向け、入力装置16等を押下することにより、物体OBJの現在位置の検索開始指示情報が入力される。当該検索開始指示情報の入力に基づき、光線放射部22が照射光源12に光線70を放射させ、光線70は地点Pを指示し、装置位置算出部23が位置センサ11を用いて位置取得装置80の位置情報(Xo、Yo、Zo)を算出する。上記検索開始指示情報の入力に基づき、測定部24が測定装置13に対し、光線放射部22により照射光源12から放射された光線70が指示する地点Pと装置位置算出部23により算出された位置取得装置80の位置情報(Xo、Yo、Zo)により示される位置との間の距離R、当該位置情報(Xo、Yo、Zo)により示される位置から地点Pへの仰角θおよび所定の基準方角N(例えば真北)から地点Pへの方位角αを測定させる。地点位置取得部25は、装置位置算出部23により算出された位置取得装置80の位置情報(Xo、Yo、Zo)と、測定部24により測定された地点Pと位置取得装置80の位置との間の距離R、当該位置情報(Xo、Yo、Zo)により示される位置から地点Pへの仰角θおよび所定の基準方角N(例えば真北)から地点Pへの方位角αとに基づき、地点Pの位置情報(X2、Y2、Z2)を求める。送信部83は、地点位置取得部25により求められた地点Pの位置情報(X2、Y2、Z2)および入力装置14等から入力された時期情報(2004.04.30)を通信装置12を介してサーバ90へ送信する。
【0072】
サーバ90の検索部93は、送信部83により送信された地点Pの位置情報(X2、Y2、Z2)および時期情報(2004.04.30)に照合する履歴を存在位置履歴記録部40から検索する。現在位置送信部94は、検索部93により検索された履歴中で最新の時期情報(2004.05.10)に対応する位置情報(X1、Y1、Z1)を当該履歴に対応する物体の現在位置として位置取得装置80へ送信する。
【0073】
出力部84は、サーバ90から通信装置85を介して受信した物体OBJの現在位置を出力装置15へ出力する。以上の結果、ネットワーク77経由で接続されたサーバ90側に存在位置履歴記録部40等がある場合にも、位置取得装置80を物体OBJが過去に存在していたと思われる地点へ向けて入力装置16等を押下し、物体OBJが当該地点に存在していたと思われる時期情報を入力装置14等から入力するだけで、物体OBJが現在存在している地点の位置情報を位置取得装置80の出力装置15に出力させることができる。従って、実施例1等と同様にユーザにとって簡易に使用することができ、製品がいつどこに置かれていたかを覚えているがその製品名を正確に思い出せない場合であっても使用することができる製品の位置検索システム1または方法を提供することができる。さらに、サーバ90側に存在位置履歴記録部40を設置し、検索部93の機能を負担させることができるため、位置取得装置80自体は軽量、小型化することが可能となる。
【実施例6】
【0074】
実施例5では、サーバ90側の検索部93が位置取得装置80側の送信部83により送信された地点Pの位置情報(X2、Y2、Z2)および時期情報(2004.04.30)に照合する履歴を存在位置履歴記録部40から検索できた場合について説明した。本実施例6では、検索部93により照合する履歴が検索されなかった場合、すなわち存在位置履歴記録部40の履歴欄42の内容に上記位置情報および上記時期情報がなかった場合の処理について説明する。
【0075】
実施例6では、サーバ90側が記録している物体に関する情報を位置取得装置80側のユーザ側へ提供し、ユーザ側にそれらの情報の中から探そうとしている製品を選択させ、当該選択に基づき物体IDを取得し、位置取得装置80に新たに設けられたRFIDリーダ17を用いて当該物体IDに等しいRFIDタグを付けている物体を探すという処理を行う。この結果、ユーザは探そうとしている製品の位置を知ることができる。
【0076】
図10は、本発明の実施例6における位置検索システム2を説明するための図である。図10で図8および図4と同じ符号を付した箇所は同じ要素または同じ機能を有するため、説明は省略する。図10に示されるように、位置取得装置80には新たにRFIDリーダ17が設けられている。本実施例6においても実施例2と同様にRFIDタグ66を便宜上パッシブ型として説明する。従って、RFIDタグ66はRFIDリーダ17から非接触電力伝送により電波を受け取り、そのエネルギにより送受信を行なう。しかし実施例2と同様に、RFIDタグ66がアクティブ型であってもよいことは勿論である。
【0077】
次に、実施例6のサーバ90の内部構成91および機能ブロック92について説明する。図10に示されるように、検索部93により照合する履歴が検索されなかった場合のために、内部構成91には物体情報記録部50が新たに設置され、機能ブロック92には製品情報送信部(製品情報送信手段)95、識別子取得部(識別子取得手段)96、通知情報送信部(通知情報送信手段)97が新たに設けられている。製品情報送信部95は、物体情報記録部50に記録された各物体の製品情報を位置取得装置80へネットワーク77を介して送信する。識別子取得部96は、位置取得装置80から送信された物体の製品情報に対応する当該物体の識別子(物体ID1)を物体情報記録部50から取得する。通知情報送信部97は、識別子取得部96により取得された識別子(物体ID1)と位置取得装置80から送信された物体65の識別子(物体ID2)とが一致する場合、RFIDリーダ17が向けられた方向(ベクトルMの方向)に位置取得装置80から送信された物体の製品情報に対応する物体が存在することの通知情報を位置検索装置80へ送信する。
【0078】
次に、実施例6の位置取得装置80の機能ブロック82について説明する。図10に示されるように、機能ブロック82にはサーバ90の検索部93により照合する履歴が検索されなかった場合のために、製品情報出力部(製品情報出力手段)85、入力製品情報送信部(入力製品情報送信手段)86、識別子読取部(識別子読取手段)32、識別子送信部(識別子送信手段)87および通知部(通知手段)88が新たに設けられている。製品情報出力部85は、サーバ90の製品情報送信部95により送信された各物体の製品情報を出力装置15に出力し、物体の製品情報の選択を促す。入力製品情報送信部86は、製品情報出力部85による促しに基づいて、ユーザにより入力装置14等を用いて選択された物体の製品情報を通信装置85を用いてサーバ90へ送信する。識別子読取部32は実施例2と同様に、RFIDリーダ17にRFIDリーダ17が向けられた方向(ベクトルMの方向)の物体65に付されたRFIDタグ66から物体65の識別子(物体ID2)を読取らせる。識別子送信部87は、識別子読取部32により読取られた物体の識別子(物体ID2)を通信装置85を用いてサーバ90へ送信する。通知部88は、サーバ90の通知情報送信部97により送信された通知情報を出力装置15に出力する。この結果、ユーザは探そうとしている製品、すなわち入力装置14等を用いて選択した物体の製品情報に対応する物体の位置は、RFIDリーダ17が向けられた方向(ベクトルMの方向)に存在することを知ることができる。
【0079】
図11は、本発明の実施例6における位置取得装置80およびサーバ90の各コンピュータが実行するプログラムの流れをフローチャートで示す。図11で図9と同じステップS番号を付した処理ブロックは同じ処理を行うため説明は省略する。図11に示されるように、ステップS10からS18までは図9のフローチャートにより示される処理と同様に実行されるため省略して1つの処理ブロック(S10〜S18)で示す。図11に示されるフローチャートにおいても図9のフローチャートと同様に、物体OBJの地点をPとし、地点Pの3次元座標を(X2、Y2、Z2)とし、入力装置14から入力される時期情報を(2004.04.30)とする。図11においても図9のフローチャートと同様に、左側のフローチャートは位置取得装置80の処理の流れを示し、右側のフローチャートはサーバ90の処理の流れを示し、位置取得装置80とサーバ90との間の通信は両フローチャート間の点線により示す。
【0080】
図11に示されるように、位置取得装置80側では、ステップS10から、光線放射ステップ(ステップS12)、装置位置算出ステップ(ステップS14)、測定ステップ(ステップS16)、地点位置取得ステップ(ステップS18)まで図9のフローチャートと同様の処理を行う。次に、地点位置取得ステップ(ステップS18)で求められた地点Pの位置情報(X2、Y2、Z2)および入力装置14等から入力された時期情報(2004.04.30)を通信装置85を介してサーバ90へ送信する(送信ステップ。ステップS50)。
【0081】
サーバ90は、送信ステップ(ステップS50)で送信された地点Pの位置情報(X2、Y2、Z2)および時期情報(2004.04.30)に照合する履歴を存在位置履歴記録部40の履歴欄42から検索する(検索ステップ。ステップS52)。検索ステップ(ステップS52)で照合する履歴が検索された場合(ステップS56)、図9のステップS54と同じ処理を行って終了する(ステップS54)。一方、検索ステップ(ステップS52)で照合する履歴が検索されなかった場合(ステップS56)、物体情報記録部50に記録された各物体の製品情報を位置取得装置80へ送信する(製品情報送信ステップ。ステップS58)。
【0082】
位置取得装置80は、製品情報送信ステップ(ステップS58)で送信された各物体の製品情報を出力装置15に出力し、物体の製品情報の選択を促す(製品情報出力ステップ。ステップS70)。次に、製品情報出力ステップ(ステップS70)における促しに基づいて、ユーザにより入力装置14等を用いて選択された物体の製品情報をサーバ90へ送信する(入力製品情報送信ステップ。ステップS72)。続いて、RFIDリ−ダ17に、RFIDリーダ17が向けられた方向(ベクトルMの方向)の物体65に付されたRFIDタグ66から物体65の識別子(物体ID2)を読取らせる(識別子読取ステップ。ステップS74)。識別子読取ステップ(ステップS74)で読取られた物体65の識別子(物体ID2)をサーバ90へ送信する(識別子送信ステップ。ステップS76)。
【0083】
サーバ90は、入力製品情報送信ステップ(ステップS72)で送信された物体の製品情報に対応する物体の識別子(物体ID1)を物体情報記録部50から取得する(識別子取得ステップ。ステップS60)。次に、識別子取得ステップ(ステップS60)で取得された識別子(物体ID1)と識別子送信ステップ(ステップS76)で送信された物体の識別子(物体ID2)とが一致する場合(ステップS62)、RFIDリーダ17が向けられた方向(ベクトルMの方向)に位置取得装置80から送信された物体の製品情報に対応する物体65が存在することの通知情報を位置検索装置80に送信して(通知情報送信ステップ。ステップS64)、終了する。ステップS62で物体ID1と物体ID2とが一致しなかった場合は、そのまま終了する。あるいは、物体ID1と一致する物体ID2を有する物体が見つかるまで位置取得装置80側へRFIDリーダ17の方向(ベクトルMの方向)を変化させる指示を出し、ステップS62の判断を繰り返すこともできる(不図示)。
【0084】
位置取得装置80は、通知情報送信ステップ(ステップS64)で送信された通知情報を出力装置15に出力して(通知ステップ。ステップS78)、終了する。
【0085】
以上より、本発明の実施例6によれば、検索部93により照合する履歴が検索されなかった場合、サーバ90の製品情報送信部95は、物体情報記録部50に記録された各物体の製品情報を位置取得装置80へネットワーク77を介して送信する。位置取得装置80の製品情報出力部85は、サーバ90の製品情報送信部95により送信された各物体の製品情報を出力装置15に出力し、物体の製品情報の選択を促す。入力製品情報送信部86は、製品情報出力部85による促しに基づいて、ユーザにより入力装置14等を用いて選択された物体の製品情報をサーバ90へ送信する。サーバ90の識別子取得部96は、位置取得装置80から送信された物体の製品情報に対応する当該物体の識別子(物体ID1)を物体情報記録部50から取得する。位置取得装置80の識別子読取部32は実施例2と同様に、RFIDリーダ17にRFIDリーダ17が向けられた方向(ベクトルMの方向)の物体65に付されたRFIDタグ66から物体65の識別子(物体ID2)を読取らせる。識別子送信部87は、識別子読取部32により読取られた物体の識別子(物体ID2)をサーバ90へ送信する。サーバ90の通知情報送信部97は、識別子取得部96により取得された識別子(物体ID1)と位置取得装置80から送信された物体65の識別子(物体ID2)とが一致する場合、RFIDリーダ17が向けられた方向(ベクトルMの方向)に位置取得装置80から送信された物体の製品情報に対応する物体が存在することの通知情報を位置検索装置80に送信する。通知部88は、通知情報送信部97により送信された通知情報を出力装置15に出力する。この結果、ユーザは探そうとしている製品、すなわち入力装置14等を用いて選択した物体の製品情報に対応する物体の位置は、RFIDリーダ17が向けられた方向(ベクトルMの方向)に存在することを知ることができる。従って、実施例5と同様にユーザにとって簡易に使用することができ、製品がいつどこに置かれていたかを覚えているがその製品名を正確に思い出せない場合であっても使用することができる製品の位置検索システム2または方法を提供することができる。さらに、サーバ90側に存在位置履歴記録部40を設置し検索部93の機能を負担させ、物体情報記録部50を設置し識別子取得部96の機能を負担させることができるため、位置取得装置80自体はさらに軽量、小型化することが可能となる。
【実施例7】
【0086】
上述の実施例5または6の位置検索システム1、2または方法等において、入力装置14等はユーザ等の人の発話した音声情報を入力して認識を行なう音声認識装置(不図示)とすることもできる。例えば、物体OBJの現在位置の検索開始指示情報、照射光源12から光線70を照射するための指示等、時期情報および物体の製品情報の選択等は、ユーザ等の発話による音声情報により入力することもできる。音声認識装置としては、入力した音声データから特徴抽出を行なって音声認識を行なう通常の音声認識エンジンを用いることができる。この結果、ユーザはキー入力等を行なわずに済むため、さらに簡易に使用することができる製品の位置検索システム1、2または方法等を提供することができる。
【実施例8】
【0087】
上述の実施例5ないし7の位置検索システム1、2または方法等において、出力装置15は音声を用いて情報を出力する発話装置(不図示)とすることもできる。例えば、検索部93により検索された履歴中で最新の時期情報に対応する位置情報(X、Y、Z)を当該履歴に対応する物体OBJの現在位置として出力すること、物体情報記録部50に記録された各物体の製品情報の出力、物体の製品情報の選択を促す出力、RFIDリーダ17が向けられた方向(ベクトルMの方向)に、製品情報出力部85による促しに基づいてユーザにより選択された物体の製品情報に対応する物体65が存在することの出力等は、発話装置からの音声情報により出力することもできる。発話装置としては、予め録音してある音声データに必要な音声データを合成する通常の音声合成装置を用いることができる。この結果、ユーザは液晶ディスプレイ等を見なくても出力結果を得ることができるため、さらに簡易に使用することができる製品の位置検索システム1、2または方法等を提供することができる。
【実施例9】
【0088】
本実施例9では、物体の現在位置を収集し、存在位置履歴記録部40に記録(または更新)する位置収集装置について説明する。図12は、本発明の実施例9における位置収集装置100を示す。図12で図1または図4と同じ符号を付した箇所は同じ要素を示すため、説明は省略する。図12において、位置センサ11は位置収集装置100の位置情報の取得に用いる。測定装置13は照射光源12から放射された光線70により指示された物体68(地点B)と位置収集装置100との間の距離Rb、位置収集装置100の位置から地点Bへの仰角θbおよび所定の基準方角N(例えば真北)から地点Bへの方位角αbを測定する。実施例1と同様に、測定装置13は通常のレーザ距離計を用いることにより距離Rb、仰角θbおよび方位角αbを測定することができる。RFIDリーダ17は物体68に付されたRFIDタグ67から識別子を読取る。符号19は現在時刻を計時するタイマ、101は位置収集装置100の電源スイッチ、102は位置収集装置100の内部装置および機能等を示す内部構成であり、103は位置収集装置100のコンピュータが実行する機能を示す機能ブロックである。図12に示されるように、位置収集装置100は実施例1等の位置検索装置10から入出力装置14等および出力装置15というヒューマンインタフェース部分を取除いた簡便な装置となっている。
【0089】
次に、位置収集装置100の機能ブロック103について説明する。以下の機能は位置収集装置100の電源スイッチ101がオンになると実行される。物体位置取得部(物体位置取得手段)104は、装置位置算出部23により算出された位置収集装置100の位置情報(X0、Y0、Z0)と、測定部24により測定された物体68と位置収集装置100の位置との間の距離Rb、当該位置情報(Xo、Yo、Zo)により示される位置から地点Bへの仰角θbおよび所定の基準方角N(例えば真北)から地点Bへの方位角αbとに基づき、位置Bにある物体68の位置情報(Xb、Yb、Zb)を求める。詳細は実施例1と同様であるため省略する。この結果、例えば、(Xb、Yb、Zb)=(Xo−Db、Yo、Zo+Hb)となる。ここで、Dbは地点Bへの水平距離、Hbは地点Bとの高度差である。履歴取得部(履歴取得手段)105は、識別子読取部32により読取られた位置収集装置100からベクトルMbにより示される方向にある物体68の識別子に照合する識別子を存在位置履歴記録部40から検索し、照合した識別子に対応する履歴を取得する。更新部(更新手段)106は、物体位置取得部104により求められた物体68の位置情報(Xb、Yb、Zb)およびタイマ19により計時された現在時刻に基づく時期情報(yyyy.mm.dd)を用いて、履歴取得部105により取得された履歴を更新する。追加部(追加手段)107については後述する。
【0090】
図13(A)は本発明の実施例9における存在位置履歴記録部40の構成例を示す。図13(A)で図2(A)と同じ符号を付した箇所は同じ要素を示すため説明は省略する。図13(A)に示されるように、物体ID欄41がBOX−01の行40nでは履歴欄42の内容は(((X6、Y6、Z6)、(2004.06.10)))である。すなわち、物体IDがBOX−01である物体は、2004年6月10日に位置情報(X6、Y6、Z6)で示される位置にいたことを示す。図13(B)は本発明の実施例9における更新後の存在位置履歴記録部40の構成例を示す。図13(B)で図13(A)と同じ符号を付した箇所は同じ要素を示すため説明は省略する。
【0091】
識別子読取部32により読取られた物体68の識別子(物体ID)をBOX−01とすると、履歴取得部105はBOX−01に照合する識別子(物体ID)を存在位置履歴記録部40から検索する。すなわち、図13(A)に示される存在位置履歴記録部40の物体ID欄41を検索する。この場合、行40nにおいて物体ID=BOX−01と照合するため、履歴欄42から対応する履歴(((X6、Y6、Z6)、(2004.06.10)))を取得する。タイマ19により計時された現在時刻に基づく時期情報を(2004.06.17)とすると、更新部106は、物体68の位置情報(Xb、Yb、Zb)および時期情報(2004.06.17)を用いて上記履歴を更新し、図13(B)の行40nの履歴欄42に示されるように、履歴(((Xb、Yb、Zb)、(2004.06.17))、((X6、Y6、Z6)、(2004.06.10)))とすることができる。以上により、位置収集装置100を所望の方向へ向けて物体68等の位置情報(Xb、Yb、Zb)と物体68等の識別子(物体ID)とを得ることができる。存在位置履歴記録部40の物体ID欄41内で物体68等の識別子(物体ID)と等しい値を有する識別子(物体ID)を検索し、対応する履歴を物体68等の位置情報(Xb、Yb、Zb)とタイマ19により計時された現在時刻に基づく時期情報(2004.06.17)とを用いて更新することができる。
【0092】
図14は、本発明の実施例6における位置収集装置100のコンピュータが実行するプログラムの流れをフローチャートで示す。図14に示されるフローチャートでは物体68の地点をBとし、地点Bの3次元座標を(Xb、Yb、Zb)とし、タイマ19により計時された現在時刻に基づく時期情報を(2004.06.17)とし、物体68の識別子(物体ID)をBOX−01とする。図14に示されるように、まず、位置収集装置100の電源スイッチ101がオンになると、光線放射部22が照射光源12に光線70を放射させる(ステップS80)。次に、装置位置算出部23が位置センサ11を用いて位置収集装置100の位置情報(X0、Y0、Z0)を算出する(ステップS82)。以上のステップS80およびS82は、位置収集装置100の電源スイッチ101がオンになり次第、並行して実行することもできる。
【0093】
続いて、測定部24は測定装置13に、光線放射部22により照射光源12から放射された光線70が指示する物体68と装置位置算出部23により算出された位置収集装置100の位置との間の距離Rb、位置収集装置100の位置から地点Bへの仰角θbおよび所定の基準方角N(例えば真北)から地点Bへの方位角αbを測定させる(ステップS84)。物体位置取得部104は、装置位置算出部23により算出された位置収集装置100の位置情報(X0、Y0、Z0)と、測定部24により測定された物体68と位置収集装置100の位置との間の距離Rb、当該位置情報(Xo、Yo、Zo)により示される位置から地点Bへの仰角θbおよび所定の基準方角N(例えば真北)から地点Bへの方位角αbとに基づき、物体68の位置情報(Xb、Yb、Zb)を求める(ステップS86)。識別子読取部32は、物体68に付されたRFIDタグ67から物体68の識別子(物体ID=BOX−01)をRFIDリーダ17に読取らせる(ステップS88)。履歴取得部105は、識別子読取部32により読取られた物体68の識別子(物体ID=BOX−01)に照合する識別子を存在位置履歴記録部40の物体ID欄41から検索し、照合した識別子に対応する履歴を履歴欄42から取得する(ステップS90)。更新部106は、物体位置取得部104により求められた物体68の位置情報(Xb、Yb、Zb)およびタイマ19により計時された現在時刻に基づく時期情報(2004.06.17)を用いて、履歴取得部105により取得された履歴を更新する(ステップ92)。
【0094】
次に、追加部107の機能について説明する。追加部107は、履歴取得部105により物体68の識別子(物体ID=BOX−01)に照合する識別子が検索されなかった場合、上記識別子(物体ID=BOX−01)を用いて、物体位置取得部104により求められた物体68の位置情報(Xb、Yb、Zb)およびタイマ19により計時された現在時刻に基づく時期情報(2004.06.17)を物体68の履歴として存在位置履歴記録部40に追加することができる。
【0095】
図15(A)は、本発明の実施例9における存在位置履歴記録部40の別の構成例を示す。図15(A)で図13(A)と同じ符号を付した箇所は同じ要素を示すため説明は省略する。図15(A)に示されるように、存在位置履歴記録部40の物体ID欄41には識別子(物体ID=BOX−01)が含まれていないため、履歴取得部105により物体68の識別子(物体ID=BOX−01)に照合する識別子は検索されない。そこで、追加部107は識別子(物体ID=BOX−01)を用いて、物体位置取得部104により求められた物体68の位置情報(Xb、Yb、Zb)およびタイマ19により計時された現在時刻に基づく時期情報(2004.06.17)を物体68の履歴として存在位置履歴記録部40に追加する。図15(B)は、本発明の実施例9における追加後の存在位置履歴記録部40の構成例を示す。図15(B)で図15(A)と同じ符号を付した箇所は同じ要素を示すため説明は省略する。図15(B)の行40pに示されるように、追加部107により存在位置履歴記録部40の物体ID欄41に新たに識別子(物体ID=BOX−01)が設定され、対応する履歴欄42に新たに履歴(((Xb、Yb、Zb)、(2004.06.17)))が設定されている。
【0096】
図16は、本発明の実施例6における位置収集装置100のコンピュータが実行するプログラムの流れをフローチャートで示す。図16に示されるフローチャートにおいても物体68の地点をBとし、地点Bの3次元座標を(Xb、Yb、Zb)とし、タイマ19により計時された現在時刻に基づく時期情報を(2004.06.17)とし、物体68の識別子(物体ID)をBOX−01とする。図16で図14と同じステップS番号を付した処理ブロックは同じ処理を行うため説明は省略する。図16に示されるように、ステップS80からS90までは図14のフローチャートにより示される処理と同様に実行されるため省略して1つの処理ブロック(S80〜S90)で示す。履歴取得部105により物体68の識別子(物体ID=BOX−01)に照合する識別子が検索された場合(ステップS91)、図14のステップS92と同じ処理を行って終了する(ステップS92)。一方、履歴取得部105により物体68の識別子(物体ID=BOX−01)に照合する識別子が検索されなかった場合(ステップS91)、追加部107は識別子(物体ID=BOX−01)を用いて、物体位置取得部104により求められた物体68の位置情報(Xb、Yb、Zb)およびタイマ19により計時された現在時刻に基づく時期情報(2004.06.17)を物体68の履歴として存在位置履歴記録部40に追加して(ステップS94)、終了する。
【0097】
以上より、本発明の実施例9によれば、位置収集装置100の電源スイッチ101がオンになると、物体位置取得部104は装置位置算出部23により算出された位置収集装置100の位置情報(X0、Y0、Z0)と、測定部24により測定された物体68と位置収集装置100の位置との間の距離Rb、当該位置情報(Xo、Yo、Zo)により示される位置から地点Bへの仰角θbおよび所定の基準方角N(例えば真北)から地点Bへの方位角αbとに基づき、位置Bにある物体68の位置情報(Xb、Yb、Zb)を求める。履歴取得部105は、識別子読取部32により読取られた位置収集装置100からベクトルMbにより示される方向にある物体68の識別子に照合する識別子を存在位置履歴記録部40から検索し、照合した識別子に対応する履歴を取得する。更新部106は、物体位置取得部104により求められた物体68の位置情報(Xb、Yb、Zb)およびタイマ19により計時された現在時刻に基づく時期情報(2004.06.17)を用いて、履歴取得部105により取得された履歴を更新する。追加部107は、履歴取得部105により物体68の識別子(物体ID=BOX−01)に照合する識別子が検索されなかった場合、上記識別子(物体ID=BOX−01)を用いて、物体位置取得部104により求められた物体68の位置情報(Xb、Yb、Zb)およびタイマ19により計時された現在時刻に基づく時期情報(2004.06.17)を物体68の履歴として存在位置履歴記録部40に追加することができる。
【0098】
従って、位置収集装置100の電源スイッチ101をオンにした後、RFIDリーダ17を所望の物体68等の存在している方向(ベクトルMb等)へ向けるだけで、存在位置履歴記録部40における物体68等の識別子(物体ID=BOX−01等)に対応する履歴を更新することができる。存在位置履歴記録部40に物体68等の識別子(物体ID=BOX−01等)が存在しない場合は、物体68等の位置情報(Xb、Yb、Zb)およびタイマ19により計時された現在時刻に基づく時期情報(2004.06.17)等を物体68の履歴として、上記識別子(物体ID=BOX−01)に対応させて新たに存在位置履歴記録部40に設けることができる。従って、ユーザがその製品名を正確に思い出せない場合であっても、その製品(物体ID=BOX−01)がいつどこに置かれていたかを簡易に更新することができ、場合に応じて追加することができる製品の位置収集装置100を提供することができる。
【0099】
上述の位置収集装置100を用いて物体の位置を収集する位置収集方法として以下のような方法が挙げられる。家庭内でRFIDタグを有する物品に関しては、位置収集装置100を概ね当該物品があったと思われる心当たりの場所へ向けて掃引するように用いることにより、物品の位置を収集(更新または追加)することができる。あるいは、棚または収納扉等に位置収集装置100を据え付けておくことにより、棚または収納扉等内で位置が変化した物品、新たに収納された物品、外へ取り出された物品等に関し、物品の位置を収集(更新または追加)することができる。または電気掃除機のノズルの先等に位置収集装置100を据え付けておくことにより、掃除をする度に物品の位置を収集(更新または追加)することができる。
【実施例10】
【0100】
図17は、上述した各実施例を実現するための本発明のコンピュータ・プログラムを実行する位置検索装置10、位置取得装置80、サーバ90または位置収集装置100のコンピュータの内部回路120を示すブロック図である。図17に示されるように、CPU121、ROM122、RAM123、画像制御部125、コントローラ127、入力制御部128および外部インタフェース(I/F)部130はバス131に接続されている。図17において、上述の本発明のコンピュータ・プログラムは、ROM122、ディスク126a、CD−ROMあるいはDVD126n等の記録媒体(脱着可能な記録媒体を含む)に記録されている。ディスク126aには存在位置履歴記録部40、物体情報記録部50等が記録されている。本発明のコンピュータ・プログラムは、ROM122からバス131を介し、またはディスク126a、CD−ROMまたはDVD126n等の記録媒体からコントローラ127を経由してバス131を介しRAM123へロードされる。入力制御部128はテンキー等の入力装置14等、測定装置13、RFIDリーダ17等の入力操作部129と接続され入力制御等を行う。画像メモリであるVRAM124は出力装置15の少なくとも一画面分のデータ容量に相当する容量を有しており、画像制御部125はVRAM124のデータを画像データへ変換して出力装置15へ送出する機能を有している。外部I/F部130は、通信装置85を介してネットワーク77と通信する際の入出力インタフェース機能を有する。
【0101】
上述のようにCPU121が上述の本発明のコンピュータ・プログラムを実行することにより、本発明の目的を達成することができる。当該コンピュータ・プログラムは上述のようにCD−ROMまたはDVD126n等の記録媒体の形態でコンピュータCPU121に供給することができ、当該コンピュータ・プログラムを記録したCD−ROMまたはDVD126n等の記録媒体も同様に本発明を構成することになる。当該コンピュータ・プログラムを記録した記録媒体としては上述された記録媒体の他に、例えばメモリ・カード、メモリ・スティック、光ディスク、FD等を用いることができる。
【産業上の利用可能性】
【0102】
本発明の活用例として、視覚障害者が物品の位置を検索等する場合の補助器具に適用することができる。さらに、引越しの際等における物品の位置管理に適用することができる。例えば、段ボール箱内の物品の位置管理、前住居と新住居との間での物品または家具等の置き場所の管理等に適用することができる。
【図面の簡単な説明】
【0103】
【図1】本発明の実施例1における位置検索装置10を説明するための図である。
【図2(A)】本発明の実施例1における存在位置履歴記録部40の構成例を示す図である。
【図2(B)】位置情報と位置名称との変換テーブルを示す図である。
【図3】本発明の実施例1における位置検索装置10のコンピュータが実行するプログラムの流れを示すフローチャートである。
【図4】本発明の実施例2における位置検索装置10を説明するための図である。
【図5】物体情報記録部50の構成例を示す図である。
【図6】本発明の実施例2において、製品情報出力部30が出力装置15に出力する物体情報記録部50に記録された各物体の製品情報の例を示す図である。
【図7】本発明の実施例2における位置検索装置10のコンピュータが実行するプログラムの流れを示すフローチャートである。
【図8】本発明の実施例5における位置検索システム1を示す図である。
【図9】本発明の実施例5における位置検索システム1の位置取得装置80のコンピュータとサーバ90のコンピュータとが実行するプログラムの流れを示すフローチャートである。
【図10】本発明の実施例6における位置検索システム2を説明するための図である。
【図11】本発明の実施例6における位置取得装置80およびサーバ90の各コンピュータが実行するプログラムの流れを示すフローチャートである。
【図12】本発明の実施例9における位置収集装置100を示す図である。
【図13(A)】本発明の実施例9における存在位置履歴記録部40の構成例を示す図である。
【図13(B)】本発明の実施例9における更新後の存在位置履歴記録部40の構成例を示す図である。
【図14】本発明の実施例6における位置収集装置100のコンピュータが実行するプログラムの流れを示すフローチャートである。
【図15(A)】本発明の実施例9における存在位置履歴記録部40の別の構成例を示す図である。
【図15(B)】本発明の実施例9における追加後の存在位置履歴記録部40の構成例を示す図である。
【図16】本発明の実施例6における位置収集装置100のコンピュータが実行するプログラムの流れを示すフローチャートである。
【図17】上述した各実施例を実現するための本発明のコンピュータ・プログラムを実行する位置検索装置10、位置取得装置80、サーバ90または位置収集装置100のコンピュータの内部回路120を示すブロック図である。
【符号の説明】
【0104】
1,2 位置検索システム、 6 メッセージ表示、 8 カーソル、 10 位置検索装置、 11 位置センサ、 12 照射光源、 13 測定装置、 14,16,18a,18b 入力装置、 15 出力装置、 17 RFIDリーダ、 19 タイマ、 20,81,91,102 内部構成、 21,82,92,103 機能ブロック、 22 光線放射部、 23 装置位置算出部、 24 測定部、 25 地点位置取得部、 26,93 検索部、 27 出力部、 30,85 製品情報出力部、 31,96 識別子取得部、 32 識別子読取部、 33,88 通知部、 40 存在位置履歴記録部、 40a,40b,40m,40n,40p 物体情報記録部50内の行、 41 物体ID欄、 42 履歴欄、 45 変換テーブル、 45a,45b,45j,45k 変換テーブル45内の行、 46 位置情報欄、 47 位置名称欄、 50 物体情報記録部、 60 収納棚、 61 上段、 62 中段、 63 下段、 65,68 物体、 66,67 RFIDタグ、 70 光線、 75 電波、 86 入力製品情報送信部、 87 識別子送信部、 90 サーバ、 94 現在位置送信部、 95 製品情報送信部、 97 通知情報送信部、 100 位置収集装置、 101 電源スイッチ、 104 物体位置取得部、 105 履歴取得部、 106 更新部、 107 追加部、 120 内部回路、 121 CPU、 122 ROM、 123 RAM、 124 VRAM、 125 画像制御部、 127 コントローラ、 126a ディスク、 126n CD−ROM,DVD、 128 入力制御部、 129 入力操作部、 130 外部I/F部、 131 バス。
【特許請求の範囲】
【請求項1】
物体の現在位置を検索する位置検索装置であって、該位置検索装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置検索装置との間の距離を所定の方式に基づいて測定し、該位置検索装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部とを備え、
前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段と、
前記検索開始指示情報に基づき、前記位置センサを用いて前記位置検索装置の位置情報を算出する装置位置算出手段と、
前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により取得された前記位置検索装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段と、
前記装置位置算出手段により取得された前記位置検索装置の位置情報と、前記測定手段により測定された前記地点と該位置検索装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段と、
前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報に照合する履歴を前記存在位置履歴記録部から検索する検索手段と、
前記検索手段により検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記出力装置へ出力する出力手段とを備えたことを特徴とする位置検索装置。
【請求項2】
請求項1記載の位置検索装置において、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器と、該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部とをさらに備え、
前記検索手段により照合する履歴が検索されなかった場合、
前記物体情報記録部に記録された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、
前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得する識別子取得手段と、
前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、
前記識別子取得手段により取得された識別子と前記識別子読取手段により読取られた物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報に対応する物体が存在することを前記出力装置に出力する通知手段とをさらに備えたことを特徴とする位置検索装置。
【請求項3】
請求項1または2記載の位置検索装置において、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であることを特徴とする位置検索装置。
【請求項4】
請求項1ないし3のいずれかに記載の位置検索装置において、前記出力装置は音声を用いて情報を出力する発話装置であることを特徴とする位置検索装置。
【請求項5】
請求項1ないし4のいずれかに記載の位置検索装置において、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることを特徴とする位置検索装置。
【請求項6】
請求項1ないし4のいずれかに記載の位置検索装置において、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なることを特徴とする位置検索装置。
【請求項7】
請求項6記載の位置検索装置において、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることを特徴とする位置検索装置。
【請求項8】
請求項6記載の位置検索装置において、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることを特徴とする位置検索装置。
【請求項9】
請求項6記載の位置検索装置において、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることを特徴とする位置検索装置。
【請求項10】
位置情報を取得する位置取得装置と、該位置取得装置とネットワークを介して接続されたサーバとを用いて物体の現在位置を検索する位置検索システムであって、
前記位置取得装置は、
該位置取得装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置取得装置との間の距離を所定の方式に基づいて測定し、該位置取得装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、情報を送受信する通信装置と、
前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段と、
前記検索開始指示情報に基づき、前記位置センサを用いて前記位置取得装置の位置情報を算出する装置位置算出手段と、
前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により算出された前記位置取得装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段と、
前記装置位置算出手段により算出された前記位置取得装置の位置情報と、前記測定手段により測定された前記地点と該位置取得装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段と、
前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報を前記通信装置を介して前記サーバへ送信する送信手段と、
前記サーバから前記通信装置を介して受信した物体の現在位置を前記出力装置へ出力する出力手段とを備え、
前記サーバは、
物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部と、
前記送信手段により送信された前記地点の位置情報及び前記時期情報に照合する履歴を前記存在位置履歴記録部から検索する検索手段と、
前記検索手段により検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記位置取得装置へ送信する現在位置送信手段とを備えたことを特徴とする位置検索システム。
【請求項11】
請求項10記載の位置検索システムにおいて、前記位置取得装置は物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器をさらに備え、前記サーバは該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部をさらに備えており、
前記サーバは、前記検索手段により照合する履歴が検索されなかった場合、
前記物体情報記録部に記録された各物体の製品情報を前記位置取得装置へ送信する製品情報送信手段と、
前記位置取得装置から送信された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得する識別子取得手段と、
前記識別子取得手段により取得された識別子と前記位置取得装置から送信された物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記位置取得装置から送信された物体の製品情報に対応する物体が存在することの通知情報を該位置検索装置に送信する通知情報送信手段とをさらに備え、
前記位置取得装置は、
前記製品情報送信手段により送信された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、
前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報を前記サーバへ送信する入力製品情報送信手段と、
前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、
前記識別子読取手段により読取られた物体の識別子を前記サーバへ送信する識別子送信手段と、
前記通知情報送信手段により送信された通知情報を前記出力装置に出力する通知手段とをさらに備えたことを特徴とする位置検索システム。
【請求項12】
請求項10または11記載の位置検索システムにおいて、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であることを特徴とする位置検索システム。
【請求項13】
請求項10ないし12のいずれかに記載の位置検索システムにおいて、前記出力装置は音声を用いて情報を出力する発話装置であることを特徴とする位置検索システム。
【請求項14】
請求項10ないし13のいずれかに記載の位置検索システムにおいて、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることを特徴とする位置検索システム。
【請求項15】
請求項10ないし13のいずれかに記載の位置検索システムにおいて、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なることを特徴とする位置検索システム。
【請求項16】
請求項15記載の位置検索システムにおいて、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることを特徴とする位置検索システム。
【請求項17】
請求項15記載の位置検索システムにおいて、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることを特徴とする位置検索システム。
【請求項18】
請求項15記載の位置検索システムにおいて、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることを特徴とする位置検索システム。
【請求項19】
物体の現在位置を検索する位置検索システムにおける該物体の位置情報を取得する位置取得装置であって、該位置取得装置はネットワークを介してサーバと接続されており、
前記位置取得装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置取得装置との間の距離を所定の方式に基づいて測定し、該位置取得装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、該ネットワークを介して該サーバと情報を送受信する通信装置と、
前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段と、
前記検索開始指示情報に基づき、前記位置センサを用いて前記位置取得装置の位置情報を算出する装置位置算出手段と、
前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により算出された前記位置取得装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段と、
前記装置位置算出手段により算出された前記位置取得装置の位置情報と、前記測定手段により測定された前記地点と該位置取得装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段と、
前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報を前記通信装置を介して前記サーバへ送信する送信手段と、
前記サーバから前記通信装置を介して受信した物体の現在位置であって、前記サーバが、前記送信手段により送信された前記地点の位置情報及び前記時期情報に照合する履歴を物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部から検索し、検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記位置取得装置へ送信したものを、前記出力装置へ出力する出力手段とを備えたことを特徴とする位置取得装置。
【請求項20】
請求項19記載の位置取得装置において、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器をさらに備え、前記サーバは該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部をさらに備えており、
前記サーバが前記検索手段により照合する履歴が検索されなかった場合に前記位置取得装置へ送信する前記物体情報記録部に記録された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、
前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報を前記サーバへ送信する入力製品情報送信手段と、
前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、
前記識別子読取手段により読取られた物体の識別子を前記サーバへ送信する識別子送信手段と、
前記サーバが、前記入力製品情報送信手段により送信された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得し、取得された識別子と前記識別子送信手段により送信された物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記入力製品情報送信手段により送信された物体の製品情報に対応する物体が存在することの通知情報であって該位置検索装置に送信したものを前記出力装置に出力する通知手段とをさらに備えたことを特徴とする位置取得装置。
【請求項21】
請求項19または20記載の位置取得装置において、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であることを特徴とする位置取得装置。
【請求項22】
請求項19ないし21のいずれかに記載の位置取得装置において、前記出力装置は音声を用いて情報を出力する発話装置であることを特徴とする位置取得装置。
【請求項23】
請求項19ないし22のいずれかに記載の位置取得装置において、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることを特徴とする位置取得装置。
【請求項24】
請求項19ないし22のいずれかに記載の位置取得装置において、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なることを特徴とする位置取得装置。
【請求項25】
請求項24記載の位置取得装置において、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることを特徴とする位置取得装置。
【請求項26】
請求項24記載の位置取得装置において、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることを特徴とする位置取得装置。
【請求項27】
請求項24記載の位置取得装置において、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることを特徴とする位置取得装置。
【請求項28】
位置情報を取得する位置取得装置と、該位置取得装置とネットワークを介して接続されたサーバとを用いて物体の現在位置を検索する位置検索方法であって、
前記位置取得装置は、該位置取得装置の位置情報を取得する位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置取得装置との間の距離を所定の方式に基づいて測定し、該位置取得装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、該ネットワークを介して該サーバと情報を送受信する通信装置とを備え、
前記サーバは、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した前記存在位置履歴記録部を備えており、
前記位置検索方法は、
前記位置取得装置が、
前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射ステップと、
前記検索開始指示情報に基づき、前記位置センサを用いて前記位置検索装置の位置情報を算出する装置位置算出ステップと、
前記測定装置に、前記光線放射ステップで前記照射光源から放射された光線が指示する地点と前記装置位置算出ステップで算出された前記位置取得装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定ステップと、
前記装置位置算出ステップで算出された前記位置取得装置の位置情報と、前記測定ステップで測定された前記地点と該位置取得装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得ステップと、
前記地点位置取得ステップで求められた前記地点の位置情報及び前記入力装置から入力された時期情報を前記通信装置を介して前記サーバへ送信する送信ステップと、
前記サーバが、
前記送信ステップで送信された前記地点の位置情報及び前記時期情報に照合する履歴を前記存在位置履歴記録部から検索する検索ステップと、
前記検索ステップで検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記位置取得装置へ送信する現在位置送信ステップと、
前記位置取得装置が、前記現在位置送信ステップでサーバから送信され前記通信装置を介して受信した物体の現在位置を前記出力装置へ出力する出力ステップとを備えたことを特徴とする位置検索方法。
【請求項29】
請求項28記載の位置検索方法において、前記位置取得装置は物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器をさらに備え、前記サーバは該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部をさらに備えており、
前記サーバが、前記検索ステップで照合する履歴が検索されなかった場合、前記物体情報記録部に記録された各物体の製品情報を前記位置取得装置へ送信する製品情報送信ステップと、
前記位置取得装置が、
前記製品情報送信ステップで送信された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力ステップと、
前記製品情報出力ステップにおける促しに基づいて前記入力装置を用いて選択された物体の製品情報を前記サーバへ送信する入力製品情報送信ステップと、
前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取ステップと、
前記識別子読取ステップで読取られた物体の識別子を前記サーバへ送信する識別子送信ステップと、
前記サーバが、
前記入力製品情報送信ステップで送信された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得する識別子取得ステップと、
前記識別子取得ステップで取得された識別子と前記識別子送信ステップで送信された物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記位置取得装置から送信された物体の製品情報に対応する物体が存在することの通知情報を該位置検索装置に送信する通知情報送信ステップと、
前記位置取得装置が、前記通知情報送信ステップで送信された通知情報を前記出力装置に出力する通知ステップとをさらに備えたことを特徴とする位置検索方法。
【請求項30】
請求項28または29記載の位置検索方法において、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であることを特徴とする位置検索方法。
【請求項31】
請求項28ないし30のいずれかに記載の位置検索方法において、前記出力装置は音声を用いて情報を出力する発話装置であることを特徴とする位置検索方法。
【請求項32】
請求項28ないし31のいずれかに記載の位置検索方法において、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることを特徴とする位置検索方法。
【請求項33】
請求項28ないし31のいずれかに記載の位置検索方法において、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なることを特徴とする位置検索方法。
【請求項34】
請求項33記載の位置検索方法において、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることを特徴とする位置検索方法。
【請求項35】
請求項33記載の位置検索方法において、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることを特徴とする位置検索方法。
【請求項36】
請求項33記載の位置検索方法において、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることを特徴とする位置検索方法。
【請求項37】
物体の現在位置を収集する位置収集装置であって、該位置収集装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された物体と該位置収集装置との間の距離を所定の方式に基づいて測定し、該位置検索装置から該物体への仰角及び所定の基準方角から該物体の方角への方位角を測定する測定装置と、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器と、現在時刻を計時するタイマと、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に前記識別子を用いて記録した存在位置履歴記録部とを備え、
前記照射光源に光線を放射させる光線放射手段と、
前記位置センサを用いて前記位置収集装置の位置情報を算出する装置位置算出手段と、
前記測定装置に前記光線放射手段により前記照射光源から放射された光線が指示する物体と前記装置位置算出手段により算出された前記位置収集装置の位置との間の距離、該位置から該物体への仰角及び所定の基準方角から該物体の方角への方位角を測定させる測定手段と、
前記装置位置算出手段により算出された前記位置収集装置の位置情報と、前記測定手段により測定された前記物体と該位置収集装置の前記位置との間の距離、前記位置から前記物体への仰角及び所定の基準方角から前記物体の方角への方位角とに基づき、該物体の位置情報を求める物体位置取得手段と、
前記物体に付された無線自動識別タグから該物体の識別子を前記無線自動識別タグ読取器に読取らせる識別子読取手段と、
前記識別子読取手段により読取られた前記物体の識別子に照合する識別子を前記存在位置履歴記録部から検索し、照合した識別子に対応する履歴を取得する履歴取得手段と、
前記物体位置取得手段により求められた該物体の位置情報及び前記タイマにより計時された現在時刻に基づく時期情報を用いて、前記履歴取得手段により取得された前記履歴を更新する更新手段とをさらに備えたことを特徴とする位置収集装置。
【請求項38】
請求項37記載の位置収集装置において、前記履歴取得手段により前記物体の識別子に照合する識別子が検索されなかった場合、
前記識別子を用いて、前記物体位置取得手段により求められた該物体の位置情報及び前記タイマにより計時された現在時刻に基づく時期情報を前記物体の履歴として前記存在位置履歴記録部に追加する追加手段をさらに備えたことを特徴とする位置収集装置。
【請求項39】
請求項37または38記載の位置収集装置において、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることを特徴とする位置収集装置。
【請求項40】
請求項37または38記載の位置収集装置において、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なることを特徴とする位置収集装置。
【請求項41】
請求項40記載の位置収集装置において、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることを特徴とする位置収集装置。
【請求項42】
請求項40記載の位置収集装置において、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることを特徴とする位置収集装置。
【請求項43】
請求項40記載の位置収集装置において、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることを特徴とする位置収集装置。
【請求項44】
請求項37ないし43のいずれかに記載の位置収集装置を用いて物体の位置を収集することを特徴とする位置収集方法。
【請求項45】
物体の現在位置を位置検索装置を用いて検索するためのプログラムであって、該位置検索装置は、該位置検索装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置検索装置との間の距離を所定の方式に基づいて測定し、該位置検索装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部とを備えており、
前記位置検索装置のコンピュータを、
前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段、
前記検索開始指示情報に基づき、前記位置センサを用いて前記位置検索装置の位置情報を算出する装置位置算出手段、
前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により算出された前記位置検索装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段、
前記装置位置算出手段により算出された前記位置検索装置の位置情報と、前記測定手段により測定された前記地点と該位置検索装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段、
前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報に照合する履歴を前記存在位置履歴記録部から検索する検索手段、
前記検索手段により検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記出力装置へ出力する出力手段として機能させるためのプログラム。
【請求項46】
請求項45記載のプログラムにおいて、前記位置検索装置は、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器と、該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部とをさらに備え、
前記検索手段により照合する履歴が検索されなかった場合、
前記物体情報記録部に記録された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、
前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得する識別子取得手段と、
前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、
前記識別子取得手段により取得された識別子と前記識別子読取手段により読取られた物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報に対応する物体が存在することを前記出力装置に出力する通知手段とをさらに備えたことを特徴とするプログラム。
【請求項47】
物体の現在位置を検索する位置検索システムにおける該物体の位置情報を取得する位置取得装置で実行されるためのプログラムであって、該位置取得装置はネットワークを介してサーバと接続され、該位置取得装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置取得装置との間の距離を所定の方式に基づいて測定し、該位置検索装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、情報を送受信する通信装置とを有しており、該位置検索装置のコンピュータを、
前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段、
前記検索開始指示情報に基づき、前記位置センサを用いて前記位置取得装置の位置情報を算出する装置位置算出手段、
前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により算出された前記位置取得装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段、
前記装置位置算出手段により算出された前記位置取得装置の位置情報と、前記測定手段により測定された前記地点と該位置取得装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段、
前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報を前記通信装置を介して前記サーバへ送信する送信手段、
前記サーバから前記通信装置を介して受信した物体の現在位置であって、前記サーバが、前記送信手段により送信された前記地点の位置情報及び前記時期情報に照合する履歴を物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部から検索し、検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記位置取得装置へ送信したものを、前記出力装置へ出力する出力手段として機能させるためのプログラム。
【請求項48】
請求項47記載のプログラムにおいて、前記位置取得装置は前記物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器をさらに備え、前記サーバは該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部をさらに備えており、
前記サーバが前記検索手段により照合する履歴が検索されなかった場合に前記位置取得装置へ送信する前記物体情報記録部に記録された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、
前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報を前記サーバへ送信する入力製品情報送信手段と、
前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、
前記識別子読取手段により読取られた物体の識別子を前記サーバへ送信する識別子送信手段と、
前記サーバが、前記入力製品情報送信手段により送信された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得し、取得された識別子と前記識別子送信手段により送信された物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記入力製品情報送信手段により送信された物体の製品情報に対応する物体が存在することの通知情報であって該位置検索装置に送信したものを前記出力装置に出力する通知手段とをさらに備えたことを特徴とするプログラム。
【請求項49】
請求項45ないし48のいずれかに記載のプログラムにおいて、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であることを特徴とするプログラム。
【請求項50】
請求項45ないし49のいずれかに記載のプログラムにおいて、前記出力装置は音声を用いて情報を出力する発話装置であることを特徴とするプログラム。
【請求項51】
物体の現在位置を位置収集装置に収集させるためのプログラムであって、該位置収集装置は、該位置収集装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された物体と該位置収集装置との間の距離を所定の方式に基づいて測定し、該位置収集装置から該物体への仰角及び所定の基準方角から該物体の方角への方位角を測定する測定装置と、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器と、現在時刻を計時するタイマと、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に前記識別子を用いて記録した存在位置履歴記録部とを有しており、該位置収集装置のコンピュータを、
前記照射光源に光線を放射させる光線放射手段、
前記位置センサを用いて前記位置収集装置の位置情報を算出する装置位置算出手段、
前記測定装置に前記光線放射手段により前記照射光源から放射された光線が指示する物体と前記装置位置算出手段により算出された前記位置収集装置の位置との間の距離、該位置から該物体への仰角及び所定の基準方角から該物体の方角への方位角を測定させる測定手段、
前記装置位置算出手段により算出された前記位置収集装置の位置情報と、前記測定手段により測定された前記物体と該位置収集装置の前記位置との間の距離、前記位置から前記物体への仰角及び所定の基準方角から前記物体の方角への方位角とに基づき、該物体の位置情報を求める物体位置取得手段、
前記物体に付された無線自動識別タグから該物体の識別子を前記無線自動識別タグ読取器に読取らせる識別子読取手段、
前記識別子読取手段により読取られた前記物体の識別子に照合する識別子を前記存在位置履歴記録部から検索し、照合した識別子に対応する履歴を取得する履歴取得手段、
前記物体位置取得手段により求められた該物体の位置情報及び前記タイマにより計時された現在時刻に基づく時期情報を用いて、前記履歴取得手段により取得された前記履歴を更新する更新手段として機能させるためのプログラム。
【請求項52】
請求項51記載のプログラムにおいて、前記履歴取得手段により前記物体の識別子に照合する識別子が検索されなかった場合、
前記識別子を用いて、前記物体位置取得手段により求められた該物体の位置情報及び前記タイマにより計時された現在時刻に基づく時期情報を前記物体の履歴として前記存在位置履歴記録部に追加する追加手段をさらに備えたことを特徴とするプログラム。
【請求項53】
請求項45ないし52のいずれかに記載のプログラムにおいて、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることを特徴とするプログラム。
【請求項54】
請求項45ないし52のいずれかに記載のプログラムにおいて、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なることを特徴とするプログラム。
【請求項55】
請求項54記載のプログラムにおいて、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることを特徴とするプログラム。
【請求項56】
請求項54記載のプログラムにおいて、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることを特徴とするプログラム。
【請求項57】
請求項54記載のプログラムにおいて、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることを特徴とするプログラム。
【請求項58】
請求項45ないし57のいずれかに記載のプログラムを記録したコンピュータ読取り可能な記録媒体。
【請求項1】
物体の現在位置を検索する位置検索装置であって、該位置検索装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置検索装置との間の距離を所定の方式に基づいて測定し、該位置検索装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部とを備え、
前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段と、
前記検索開始指示情報に基づき、前記位置センサを用いて前記位置検索装置の位置情報を算出する装置位置算出手段と、
前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により取得された前記位置検索装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段と、
前記装置位置算出手段により取得された前記位置検索装置の位置情報と、前記測定手段により測定された前記地点と該位置検索装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段と、
前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報に照合する履歴を前記存在位置履歴記録部から検索する検索手段と、
前記検索手段により検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記出力装置へ出力する出力手段とを備えたことを特徴とする位置検索装置。
【請求項2】
請求項1記載の位置検索装置において、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器と、該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部とをさらに備え、
前記検索手段により照合する履歴が検索されなかった場合、
前記物体情報記録部に記録された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、
前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得する識別子取得手段と、
前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、
前記識別子取得手段により取得された識別子と前記識別子読取手段により読取られた物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報に対応する物体が存在することを前記出力装置に出力する通知手段とをさらに備えたことを特徴とする位置検索装置。
【請求項3】
請求項1または2記載の位置検索装置において、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であることを特徴とする位置検索装置。
【請求項4】
請求項1ないし3のいずれかに記載の位置検索装置において、前記出力装置は音声を用いて情報を出力する発話装置であることを特徴とする位置検索装置。
【請求項5】
請求項1ないし4のいずれかに記載の位置検索装置において、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることを特徴とする位置検索装置。
【請求項6】
請求項1ないし4のいずれかに記載の位置検索装置において、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なることを特徴とする位置検索装置。
【請求項7】
請求項6記載の位置検索装置において、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることを特徴とする位置検索装置。
【請求項8】
請求項6記載の位置検索装置において、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることを特徴とする位置検索装置。
【請求項9】
請求項6記載の位置検索装置において、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることを特徴とする位置検索装置。
【請求項10】
位置情報を取得する位置取得装置と、該位置取得装置とネットワークを介して接続されたサーバとを用いて物体の現在位置を検索する位置検索システムであって、
前記位置取得装置は、
該位置取得装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置取得装置との間の距離を所定の方式に基づいて測定し、該位置取得装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、情報を送受信する通信装置と、
前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段と、
前記検索開始指示情報に基づき、前記位置センサを用いて前記位置取得装置の位置情報を算出する装置位置算出手段と、
前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により算出された前記位置取得装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段と、
前記装置位置算出手段により算出された前記位置取得装置の位置情報と、前記測定手段により測定された前記地点と該位置取得装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段と、
前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報を前記通信装置を介して前記サーバへ送信する送信手段と、
前記サーバから前記通信装置を介して受信した物体の現在位置を前記出力装置へ出力する出力手段とを備え、
前記サーバは、
物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部と、
前記送信手段により送信された前記地点の位置情報及び前記時期情報に照合する履歴を前記存在位置履歴記録部から検索する検索手段と、
前記検索手段により検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記位置取得装置へ送信する現在位置送信手段とを備えたことを特徴とする位置検索システム。
【請求項11】
請求項10記載の位置検索システムにおいて、前記位置取得装置は物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器をさらに備え、前記サーバは該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部をさらに備えており、
前記サーバは、前記検索手段により照合する履歴が検索されなかった場合、
前記物体情報記録部に記録された各物体の製品情報を前記位置取得装置へ送信する製品情報送信手段と、
前記位置取得装置から送信された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得する識別子取得手段と、
前記識別子取得手段により取得された識別子と前記位置取得装置から送信された物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記位置取得装置から送信された物体の製品情報に対応する物体が存在することの通知情報を該位置検索装置に送信する通知情報送信手段とをさらに備え、
前記位置取得装置は、
前記製品情報送信手段により送信された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、
前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報を前記サーバへ送信する入力製品情報送信手段と、
前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、
前記識別子読取手段により読取られた物体の識別子を前記サーバへ送信する識別子送信手段と、
前記通知情報送信手段により送信された通知情報を前記出力装置に出力する通知手段とをさらに備えたことを特徴とする位置検索システム。
【請求項12】
請求項10または11記載の位置検索システムにおいて、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であることを特徴とする位置検索システム。
【請求項13】
請求項10ないし12のいずれかに記載の位置検索システムにおいて、前記出力装置は音声を用いて情報を出力する発話装置であることを特徴とする位置検索システム。
【請求項14】
請求項10ないし13のいずれかに記載の位置検索システムにおいて、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることを特徴とする位置検索システム。
【請求項15】
請求項10ないし13のいずれかに記載の位置検索システムにおいて、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なることを特徴とする位置検索システム。
【請求項16】
請求項15記載の位置検索システムにおいて、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることを特徴とする位置検索システム。
【請求項17】
請求項15記載の位置検索システムにおいて、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることを特徴とする位置検索システム。
【請求項18】
請求項15記載の位置検索システムにおいて、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることを特徴とする位置検索システム。
【請求項19】
物体の現在位置を検索する位置検索システムにおける該物体の位置情報を取得する位置取得装置であって、該位置取得装置はネットワークを介してサーバと接続されており、
前記位置取得装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置取得装置との間の距離を所定の方式に基づいて測定し、該位置取得装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、該ネットワークを介して該サーバと情報を送受信する通信装置と、
前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段と、
前記検索開始指示情報に基づき、前記位置センサを用いて前記位置取得装置の位置情報を算出する装置位置算出手段と、
前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により算出された前記位置取得装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段と、
前記装置位置算出手段により算出された前記位置取得装置の位置情報と、前記測定手段により測定された前記地点と該位置取得装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段と、
前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報を前記通信装置を介して前記サーバへ送信する送信手段と、
前記サーバから前記通信装置を介して受信した物体の現在位置であって、前記サーバが、前記送信手段により送信された前記地点の位置情報及び前記時期情報に照合する履歴を物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部から検索し、検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記位置取得装置へ送信したものを、前記出力装置へ出力する出力手段とを備えたことを特徴とする位置取得装置。
【請求項20】
請求項19記載の位置取得装置において、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器をさらに備え、前記サーバは該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部をさらに備えており、
前記サーバが前記検索手段により照合する履歴が検索されなかった場合に前記位置取得装置へ送信する前記物体情報記録部に記録された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、
前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報を前記サーバへ送信する入力製品情報送信手段と、
前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、
前記識別子読取手段により読取られた物体の識別子を前記サーバへ送信する識別子送信手段と、
前記サーバが、前記入力製品情報送信手段により送信された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得し、取得された識別子と前記識別子送信手段により送信された物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記入力製品情報送信手段により送信された物体の製品情報に対応する物体が存在することの通知情報であって該位置検索装置に送信したものを前記出力装置に出力する通知手段とをさらに備えたことを特徴とする位置取得装置。
【請求項21】
請求項19または20記載の位置取得装置において、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であることを特徴とする位置取得装置。
【請求項22】
請求項19ないし21のいずれかに記載の位置取得装置において、前記出力装置は音声を用いて情報を出力する発話装置であることを特徴とする位置取得装置。
【請求項23】
請求項19ないし22のいずれかに記載の位置取得装置において、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることを特徴とする位置取得装置。
【請求項24】
請求項19ないし22のいずれかに記載の位置取得装置において、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なることを特徴とする位置取得装置。
【請求項25】
請求項24記載の位置取得装置において、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることを特徴とする位置取得装置。
【請求項26】
請求項24記載の位置取得装置において、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることを特徴とする位置取得装置。
【請求項27】
請求項24記載の位置取得装置において、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることを特徴とする位置取得装置。
【請求項28】
位置情報を取得する位置取得装置と、該位置取得装置とネットワークを介して接続されたサーバとを用いて物体の現在位置を検索する位置検索方法であって、
前記位置取得装置は、該位置取得装置の位置情報を取得する位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置取得装置との間の距離を所定の方式に基づいて測定し、該位置取得装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、該ネットワークを介して該サーバと情報を送受信する通信装置とを備え、
前記サーバは、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した前記存在位置履歴記録部を備えており、
前記位置検索方法は、
前記位置取得装置が、
前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射ステップと、
前記検索開始指示情報に基づき、前記位置センサを用いて前記位置検索装置の位置情報を算出する装置位置算出ステップと、
前記測定装置に、前記光線放射ステップで前記照射光源から放射された光線が指示する地点と前記装置位置算出ステップで算出された前記位置取得装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定ステップと、
前記装置位置算出ステップで算出された前記位置取得装置の位置情報と、前記測定ステップで測定された前記地点と該位置取得装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得ステップと、
前記地点位置取得ステップで求められた前記地点の位置情報及び前記入力装置から入力された時期情報を前記通信装置を介して前記サーバへ送信する送信ステップと、
前記サーバが、
前記送信ステップで送信された前記地点の位置情報及び前記時期情報に照合する履歴を前記存在位置履歴記録部から検索する検索ステップと、
前記検索ステップで検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記位置取得装置へ送信する現在位置送信ステップと、
前記位置取得装置が、前記現在位置送信ステップでサーバから送信され前記通信装置を介して受信した物体の現在位置を前記出力装置へ出力する出力ステップとを備えたことを特徴とする位置検索方法。
【請求項29】
請求項28記載の位置検索方法において、前記位置取得装置は物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器をさらに備え、前記サーバは該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部をさらに備えており、
前記サーバが、前記検索ステップで照合する履歴が検索されなかった場合、前記物体情報記録部に記録された各物体の製品情報を前記位置取得装置へ送信する製品情報送信ステップと、
前記位置取得装置が、
前記製品情報送信ステップで送信された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力ステップと、
前記製品情報出力ステップにおける促しに基づいて前記入力装置を用いて選択された物体の製品情報を前記サーバへ送信する入力製品情報送信ステップと、
前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取ステップと、
前記識別子読取ステップで読取られた物体の識別子を前記サーバへ送信する識別子送信ステップと、
前記サーバが、
前記入力製品情報送信ステップで送信された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得する識別子取得ステップと、
前記識別子取得ステップで取得された識別子と前記識別子送信ステップで送信された物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記位置取得装置から送信された物体の製品情報に対応する物体が存在することの通知情報を該位置検索装置に送信する通知情報送信ステップと、
前記位置取得装置が、前記通知情報送信ステップで送信された通知情報を前記出力装置に出力する通知ステップとをさらに備えたことを特徴とする位置検索方法。
【請求項30】
請求項28または29記載の位置検索方法において、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であることを特徴とする位置検索方法。
【請求項31】
請求項28ないし30のいずれかに記載の位置検索方法において、前記出力装置は音声を用いて情報を出力する発話装置であることを特徴とする位置検索方法。
【請求項32】
請求項28ないし31のいずれかに記載の位置検索方法において、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることを特徴とする位置検索方法。
【請求項33】
請求項28ないし31のいずれかに記載の位置検索方法において、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なることを特徴とする位置検索方法。
【請求項34】
請求項33記載の位置検索方法において、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることを特徴とする位置検索方法。
【請求項35】
請求項33記載の位置検索方法において、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることを特徴とする位置検索方法。
【請求項36】
請求項33記載の位置検索方法において、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることを特徴とする位置検索方法。
【請求項37】
物体の現在位置を収集する位置収集装置であって、該位置収集装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された物体と該位置収集装置との間の距離を所定の方式に基づいて測定し、該位置検索装置から該物体への仰角及び所定の基準方角から該物体の方角への方位角を測定する測定装置と、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器と、現在時刻を計時するタイマと、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に前記識別子を用いて記録した存在位置履歴記録部とを備え、
前記照射光源に光線を放射させる光線放射手段と、
前記位置センサを用いて前記位置収集装置の位置情報を算出する装置位置算出手段と、
前記測定装置に前記光線放射手段により前記照射光源から放射された光線が指示する物体と前記装置位置算出手段により算出された前記位置収集装置の位置との間の距離、該位置から該物体への仰角及び所定の基準方角から該物体の方角への方位角を測定させる測定手段と、
前記装置位置算出手段により算出された前記位置収集装置の位置情報と、前記測定手段により測定された前記物体と該位置収集装置の前記位置との間の距離、前記位置から前記物体への仰角及び所定の基準方角から前記物体の方角への方位角とに基づき、該物体の位置情報を求める物体位置取得手段と、
前記物体に付された無線自動識別タグから該物体の識別子を前記無線自動識別タグ読取器に読取らせる識別子読取手段と、
前記識別子読取手段により読取られた前記物体の識別子に照合する識別子を前記存在位置履歴記録部から検索し、照合した識別子に対応する履歴を取得する履歴取得手段と、
前記物体位置取得手段により求められた該物体の位置情報及び前記タイマにより計時された現在時刻に基づく時期情報を用いて、前記履歴取得手段により取得された前記履歴を更新する更新手段とをさらに備えたことを特徴とする位置収集装置。
【請求項38】
請求項37記載の位置収集装置において、前記履歴取得手段により前記物体の識別子に照合する識別子が検索されなかった場合、
前記識別子を用いて、前記物体位置取得手段により求められた該物体の位置情報及び前記タイマにより計時された現在時刻に基づく時期情報を前記物体の履歴として前記存在位置履歴記録部に追加する追加手段をさらに備えたことを特徴とする位置収集装置。
【請求項39】
請求項37または38記載の位置収集装置において、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることを特徴とする位置収集装置。
【請求項40】
請求項37または38記載の位置収集装置において、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なることを特徴とする位置収集装置。
【請求項41】
請求項40記載の位置収集装置において、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることを特徴とする位置収集装置。
【請求項42】
請求項40記載の位置収集装置において、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることを特徴とする位置収集装置。
【請求項43】
請求項40記載の位置収集装置において、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることを特徴とする位置収集装置。
【請求項44】
請求項37ないし43のいずれかに記載の位置収集装置を用いて物体の位置を収集することを特徴とする位置収集方法。
【請求項45】
物体の現在位置を位置検索装置を用いて検索するためのプログラムであって、該位置検索装置は、該位置検索装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置検索装置との間の距離を所定の方式に基づいて測定し、該位置検索装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部とを備えており、
前記位置検索装置のコンピュータを、
前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段、
前記検索開始指示情報に基づき、前記位置センサを用いて前記位置検索装置の位置情報を算出する装置位置算出手段、
前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により算出された前記位置検索装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段、
前記装置位置算出手段により算出された前記位置検索装置の位置情報と、前記測定手段により測定された前記地点と該位置検索装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段、
前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報に照合する履歴を前記存在位置履歴記録部から検索する検索手段、
前記検索手段により検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記出力装置へ出力する出力手段として機能させるためのプログラム。
【請求項46】
請求項45記載のプログラムにおいて、前記位置検索装置は、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器と、該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部とをさらに備え、
前記検索手段により照合する履歴が検索されなかった場合、
前記物体情報記録部に記録された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、
前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得する識別子取得手段と、
前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、
前記識別子取得手段により取得された識別子と前記識別子読取手段により読取られた物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報に対応する物体が存在することを前記出力装置に出力する通知手段とをさらに備えたことを特徴とするプログラム。
【請求項47】
物体の現在位置を検索する位置検索システムにおける該物体の位置情報を取得する位置取得装置で実行されるためのプログラムであって、該位置取得装置はネットワークを介してサーバと接続され、該位置取得装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された地点と該位置取得装置との間の距離を所定の方式に基づいて測定し、該位置検索装置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定する測定装置と、情報を入力する入力装置と、情報を出力する出力装置と、情報を送受信する通信装置とを有しており、該位置検索装置のコンピュータを、
前記入力装置から入力された物体の現在位置の検索開始指示情報に基づき、前記照射光源に光線を放射させる光線放射手段、
前記検索開始指示情報に基づき、前記位置センサを用いて前記位置取得装置の位置情報を算出する装置位置算出手段、
前記測定装置に、前記光線放射手段により前記照射光源から放射された光線が指示する地点と前記装置位置算出手段により算出された前記位置取得装置の位置情報により示される位置との間の距離、該位置から該地点への仰角及び所定の基準方角から該地点の方角への方位角を測定させる測定手段、
前記装置位置算出手段により算出された前記位置取得装置の位置情報と、前記測定手段により測定された前記地点と該位置取得装置の前記位置との間の距離、前記位置から前記地点への仰角及び所定の基準方角から前記地点の方角への方位角とに基づき、該地点の位置情報を求める地点位置取得手段、
前記地点位置取得手段により求められた前記地点の位置情報及び前記入力装置から入力された時期情報を前記通信装置を介して前記サーバへ送信する送信手段、
前記サーバから前記通信装置を介して受信した物体の現在位置であって、前記サーバが、前記送信手段により送信された前記地点の位置情報及び前記時期情報に照合する履歴を物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に記録した存在位置履歴記録部から検索し、検索された履歴中で最新の時期情報に対応する位置情報を該履歴に対応する物体の現在位置として前記位置取得装置へ送信したものを、前記出力装置へ出力する出力手段として機能させるためのプログラム。
【請求項48】
請求項47記載のプログラムにおいて、前記位置取得装置は前記物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器をさらに備え、前記サーバは該識別子と該識別子に対応する物体の名称を含む物体の製品情報とを記録した物体情報記録部をさらに備えており、
前記サーバが前記検索手段により照合する履歴が検索されなかった場合に前記位置取得装置へ送信する前記物体情報記録部に記録された各物体の製品情報を前記出力装置に出力し、物体の製品情報の選択を促す製品情報出力手段と、
前記製品情報出力手段による促しに基づいて前記入力装置を用いて選択された物体の製品情報を前記サーバへ送信する入力製品情報送信手段と、
前記無線自動識別タグ読取器に該無線自動識別タグ読取器が向けられた方向の物体に付された無線自動識別タグから該物体の識別子を読取らせる識別子読取手段と、
前記識別子読取手段により読取られた物体の識別子を前記サーバへ送信する識別子送信手段と、
前記サーバが、前記入力製品情報送信手段により送信された物体の製品情報に対応する該物体の識別子を前記物体情報記録部から取得し、取得された識別子と前記識別子送信手段により送信された物体の識別子とが一致する場合、前記無線自動識別タグ読取器が向けられた方向に前記入力製品情報送信手段により送信された物体の製品情報に対応する物体が存在することの通知情報であって該位置検索装置に送信したものを前記出力装置に出力する通知手段とをさらに備えたことを特徴とするプログラム。
【請求項49】
請求項45ないし48のいずれかに記載のプログラムにおいて、前記入力装置は人の発話した音声情報を入力して認識を行なう音声認識装置であることを特徴とするプログラム。
【請求項50】
請求項45ないし49のいずれかに記載のプログラムにおいて、前記出力装置は音声を用いて情報を出力する発話装置であることを特徴とするプログラム。
【請求項51】
物体の現在位置を位置収集装置に収集させるためのプログラムであって、該位置収集装置は、該位置収集装置の位置情報の取得に用いる位置センサと、光線を放射する照射光源と、該照射光源から放射された光線により指示された物体と該位置収集装置との間の距離を所定の方式に基づいて測定し、該位置収集装置から該物体への仰角及び所定の基準方角から該物体の方角への方位角を測定する測定装置と、物体を識別する識別子が記録された無線自動識別タグであって該物体に付されたものから該識別子を読取る無線自動識別タグ読取器と、現在時刻を計時するタイマと、物体の位置情報及び該物体が該位置情報により示される位置に存在した時期情報の履歴を該物体毎に前記識別子を用いて記録した存在位置履歴記録部とを有しており、該位置収集装置のコンピュータを、
前記照射光源に光線を放射させる光線放射手段、
前記位置センサを用いて前記位置収集装置の位置情報を算出する装置位置算出手段、
前記測定装置に前記光線放射手段により前記照射光源から放射された光線が指示する物体と前記装置位置算出手段により算出された前記位置収集装置の位置との間の距離、該位置から該物体への仰角及び所定の基準方角から該物体の方角への方位角を測定させる測定手段、
前記装置位置算出手段により算出された前記位置収集装置の位置情報と、前記測定手段により測定された前記物体と該位置収集装置の前記位置との間の距離、前記位置から前記物体への仰角及び所定の基準方角から前記物体の方角への方位角とに基づき、該物体の位置情報を求める物体位置取得手段、
前記物体に付された無線自動識別タグから該物体の識別子を前記無線自動識別タグ読取器に読取らせる識別子読取手段、
前記識別子読取手段により読取られた前記物体の識別子に照合する識別子を前記存在位置履歴記録部から検索し、照合した識別子に対応する履歴を取得する履歴取得手段、
前記物体位置取得手段により求められた該物体の位置情報及び前記タイマにより計時された現在時刻に基づく時期情報を用いて、前記履歴取得手段により取得された前記履歴を更新する更新手段として機能させるためのプログラム。
【請求項52】
請求項51記載のプログラムにおいて、前記履歴取得手段により前記物体の識別子に照合する識別子が検索されなかった場合、
前記識別子を用いて、前記物体位置取得手段により求められた該物体の位置情報及び前記タイマにより計時された現在時刻に基づく時期情報を前記物体の履歴として前記存在位置履歴記録部に追加する追加手段をさらに備えたことを特徴とするプログラム。
【請求項53】
請求項45ないし52のいずれかに記載のプログラムにおいて、前記照射光源が放射する光線はレーザ光線であり、前記測定装置における前記所定の方式は前記照射光源から放射されるレーザ光線を用いることを特徴とするプログラム。
【請求項54】
請求項45ないし52のいずれかに記載のプログラムにおいて、前記照射光源が放射する光線は所定値以下の細さのビームであってレーザ光線とは異なることを特徴とするプログラム。
【請求項55】
請求項54記載のプログラムにおいて、前記測定装置はレーザ光線を放射するレーザ光源をさらに備え、前記測定装置における前記所定の方式は前記レーザ光源から放射されるレーザ光線を用いることを特徴とするプログラム。
【請求項56】
請求項54記載のプログラムにおいて、前記測定装置は所定の音波を放射する音波源をさらに備え、前記測定装置における前記所定の方式は前記音波源から放射される所定の音波を用いることを特徴とするプログラム。
【請求項57】
請求項54記載のプログラムにおいて、前記測定装置は所定の電波を放射する電波源をさらに備え、前記測定装置における前記所定の方式は前記電波源から放射される所定の電波を用いることを特徴とするプログラム。
【請求項58】
請求項45ないし57のいずれかに記載のプログラムを記録したコンピュータ読取り可能な記録媒体。
【図1】


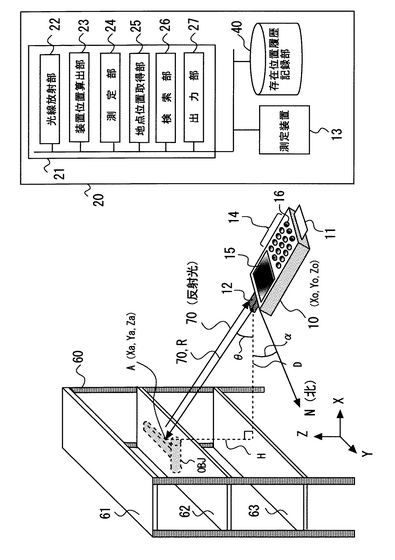
【図2(A)】
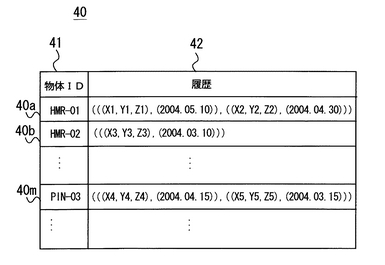
【図2(B)】
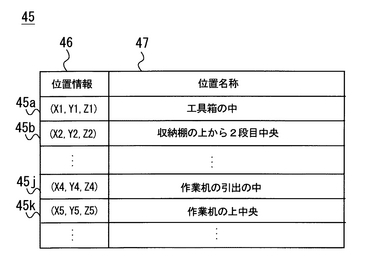
【図3】
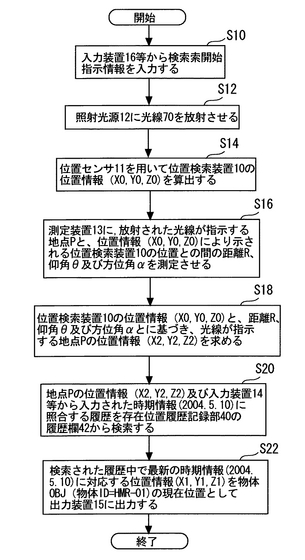
【図4】
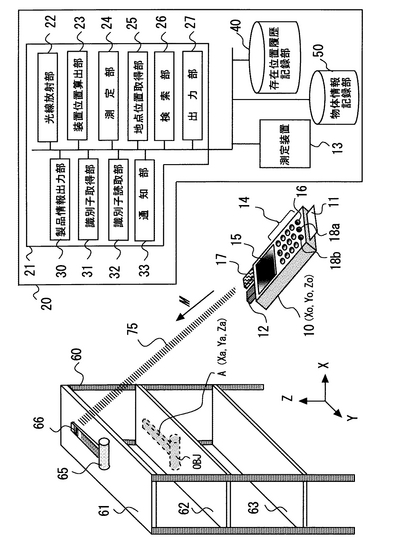
【図5】
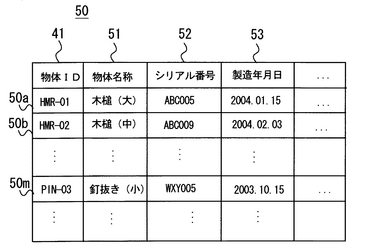
【図6】
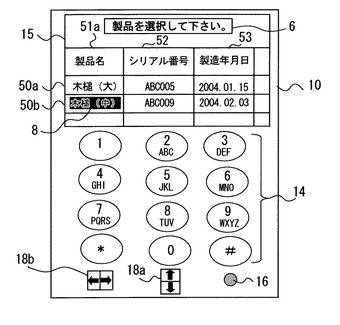
【図7】
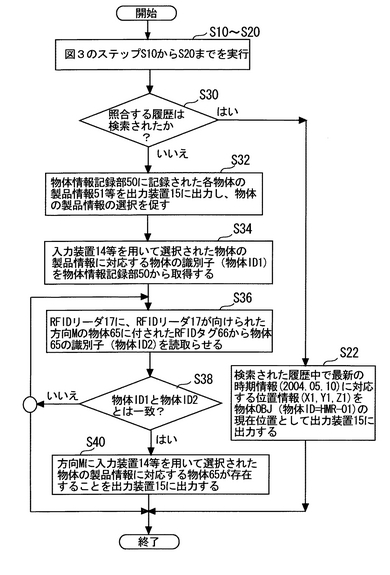
【図8】
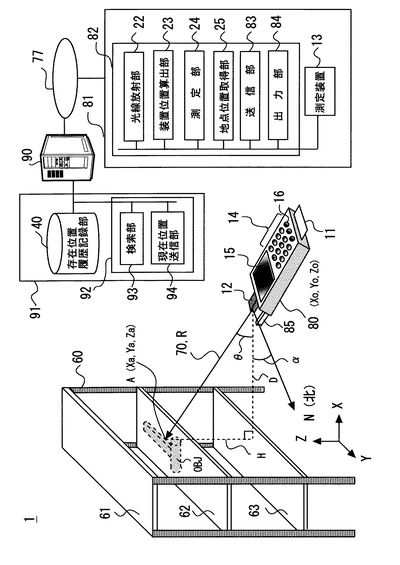
【図9】
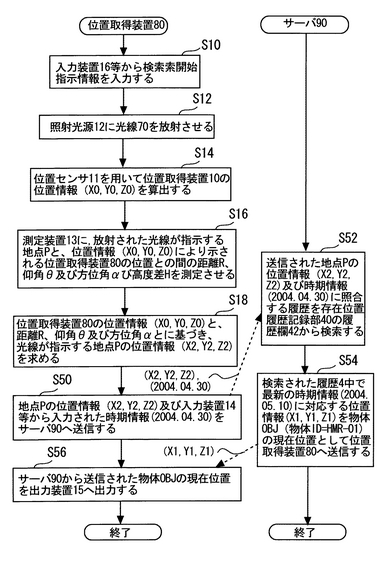
【図10】
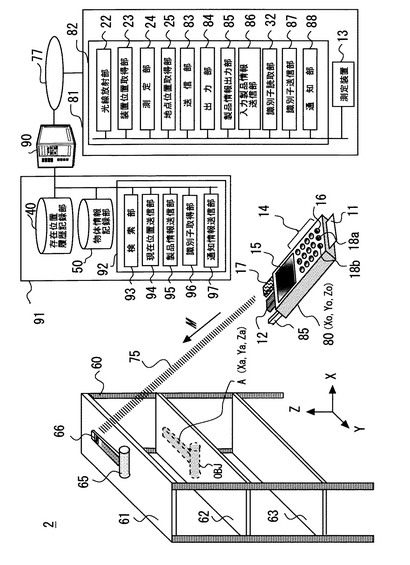
【図11】
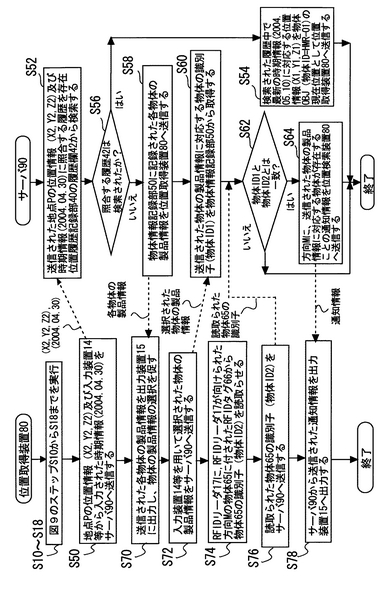
【図12】
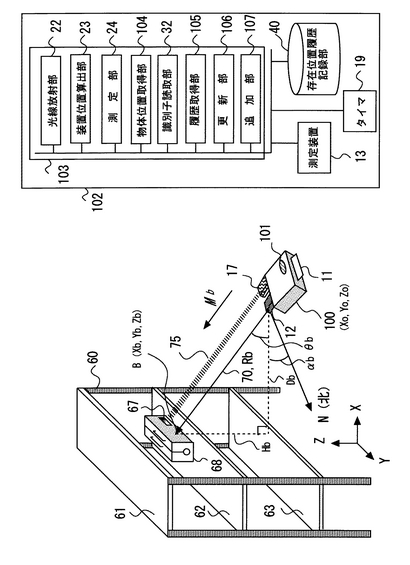
【図13(A)】
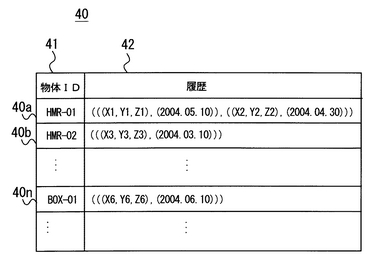
【図13(B)】
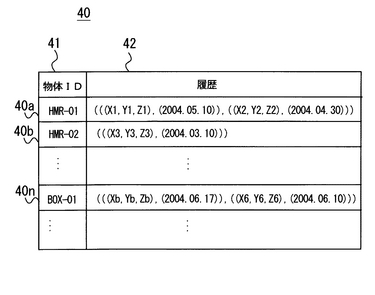
【図14】
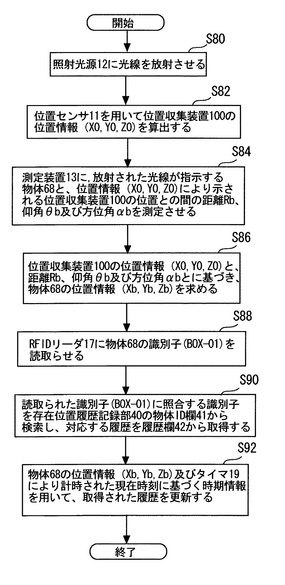
【図15(A)】
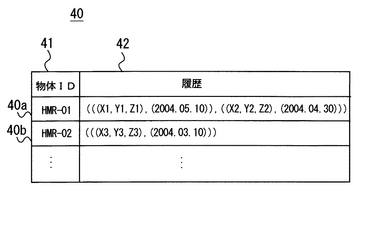
【図15(B)】
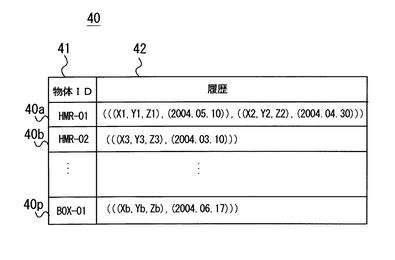
【図16】
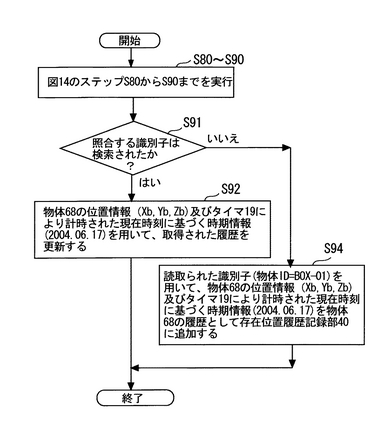
【図17】
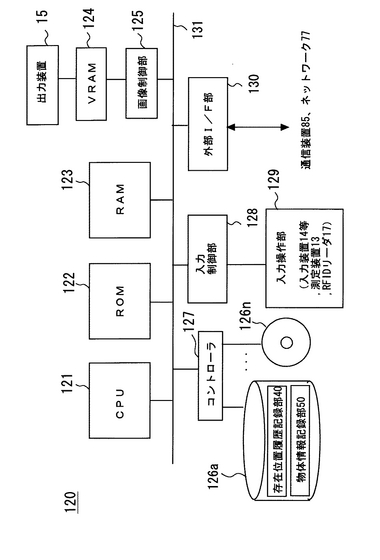
【図2(A)】
【図2(B)】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13(A)】
【図13(B)】
【図14】
【図15(A)】
【図15(B)】
【図16】
【図17】
【公開番号】特開2006−38746(P2006−38746A)
【公開日】平成18年2月9日(2006.2.9)
【国際特許分類】
【出願番号】特願2004−221680(P2004−221680)
【出願日】平成16年7月29日(2004.7.29)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【Fターム(参考)】
【公開日】平成18年2月9日(2006.2.9)
【国際特許分類】
【出願日】平成16年7月29日(2004.7.29)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【Fターム(参考)】
[ Back to top ]