
位置標定可用性を増加させるための手続
【課題】位置を決定するためのスキームの各々は、時々不正確になりまたは利用できないかもしれない。従って、任意の位置決定スキームを使用した移動局またはネットワークは、移動局の現在の位置を決定するように求められたとき何らの結果も得ることができないかもしれないし、または不正確な結果を得るかもしれない。それゆえ、より大きな信頼度で移動局の位置をより確実に決定するための装置、方法およびシステムを提供する
【解決手段】位置決定の第1のスキームを用いて移動局の位置を決定すること、および第1のスキームが受け入れ可能な位置結果を生じないなら、(i)反復が受け入れ可能な位置結果を返すまでまたは(ii)すべての利用可能な位置決定スキームが使用されるまで少なくともいくつかの反復において、第1のスキームとは異なる位置決定の少なくとも1つのさらなるスキームを用いて位置決定することを反復する。
【解決手段】位置決定の第1のスキームを用いて移動局の位置を決定すること、および第1のスキームが受け入れ可能な位置結果を生じないなら、(i)反復が受け入れ可能な位置結果を返すまでまたは(ii)すべての利用可能な位置決定スキームが使用されるまで少なくともいくつかの反復において、第1のスキームとは異なる位置決定の少なくとも1つのさらなるスキームを用いて位置決定することを反復する。
【発明の詳細な説明】
【背景技術】
【0001】
近年、人、乗り物等の位置をつきとめる能力はより重要になってきた。特に、安全性とセキュリティに対して新しい技術が導入され関心が増加している観点から重要である。人または乗り物は、人または乗り物により運ばれる移動無線装置の位置を決定することにより位置をつきとめることができる。例えば、緊急を報告するために使用される個々の携帯電話の地理的位置を決定し、それによりそのような位置が警察機関、消防機関、救急車サービスのような緊急応答作業者に報告できる能力を有した携帯電話システムを提供することが望ましい。
【0002】
地球上の人の位置を決定するためのいくつかのスキームが利用可能である。位置を決定するためのひとつの方法は、全地球測位システム(GPS)の使用を含む。GPSはもともとは軍事ナビゲーションシステムとして米国国防総省によって着想され、開発された。時間とともに、システムの原理はますます民間の使用のために利用可能になった。
【0003】
GPSは地球静止軌道において、24の衛星のコンステレーションを使用し、それによりGPS衛星からGPS受信機へのタイミング衛星信号行路により位置を決定することができる。24の衛星の1つが故障した場合に、5つの予備の周回軌道衛星が主としてバックアップのために設けられている。衛星は2つの周波数バンドL1(1575.42MHz)およびL2(1223.6MHz)でスペクトル拡散信号を送信する。信号は2つの擬似ランダム雑音コード、すなわち、粗/獲得(C/A)コードと精度(P)コードにより変調される。L1バンド内のC/Aコードは民間の応用に関係のあるコードである。さらに、GPS信号は、GPSナビゲーションメッセージと一般に呼ばれるデータメッセージで変調される。
【0004】
典型的には、GPS受信機は、測位精度を得るために三辺測量スキームを採用する。例えばGPS生成位置は、2次元の三辺測量を用いて遂行することができる。例えば、3つの衛星からの信号を用いて3つの交差する円の交点に基づいて位置を決定することができる。特に、各衛星信号は、GPS受信機が位置することができる半径を提供することができる。2つの交差する半径は、交点の面積に対して位置決定が狭められるようにすることが可能である。3つの半径すべてが一点で交差しなければならないので、他の衛星信号はGPSの位置を示す第3の半径を提供することができる。上述の概念を3次元三辺測量に拡張すると、各衛星信号を用いて球体を示すことができ、それにより3つの交差する球体を用いて高度情報を含む位置を決定することができる。より多くの衛星信号を使用することができ、典型的には、精度を改善するために使用される。
【0005】
GPS受信機において、衛星信号は、擬似ランダム雑音コードでマッチングされ同期化された後で復調される。GPS受信機はGPSナビゲーションメッセージを用いてGPS衛星の座標に加えて衛星信号経過時間を計算する。GPS受信機による位置測定は典型的に15メートル(50フィート)以内で遂行することができる。しかしながら、これらの計算の精度は、測定精度および衛星配置に依存する。大気条件は電離層の遅延を生じることがある。さらに、明らかに衛星軌道は時間に対して劣化するので、衛星軌道における不確実性はエラーに寄与する可能性がある。GPSデータを使用する位置表示に対する信頼は、今日の環境における治安関係を考慮するとさらに問題になり得る。
【0006】
GPSに関連する利用可能性に対処するために、サーバー支援GPSが1990年代後半に導入された。静止サーバーコンピューターには、GPS衛星信号を受信するための静止GPS受信機が備えられている。静止GPS受信機は、すべての可視のGPS衛星からの信号の連続した監視を可能にするために空の全景を有するアンテナと関連する。モバイルGPSステーションとの通信を可能にするために無線インターフェースは各サーバーを備えています。モバイルGPSユニットの位置についての位置クエリーに関連して、サーバーは、静止GPS受信機から取得したGPS衛星情報をモバイルGPSユニットに送信する。この情報は、モバイルGPS受信機が同期することを可能にし、擬似ランダム雑音コードをGPS衛星の擬似ランダム雑音コードと一致させることを可能にする観察可能なGPS衛星とデータのリストを含む。モバイルGPS受信機は収集したGPSデータをサーバーに送信する。次に、サーバーはモバイルGPSおよび静止GPSにより提供されたデータからモバイルGPS受信機の位置を計算する。このスキームが非サーバー支援GPSに対してより高い精度を可能にする間に、衛星信号の可用性は依然として正確な位置を獲得する際に問題を生じる可能性がある。
【0007】
機能強化された信号強度(ESS)システムはGPS独立した位置標定スキームを採用する。ビルディング、建造物および他の障害物を含む地形をカバーする3次元情報は、関心のある所定の地理的領域において無線送信アンテナの無線周波数信号伝搬特性をモデル化するために収集される。モデリングの結果はデータベースに記憶される。モバイルロケーターの位置は、多数の無線送信機からの信号の信号強度を測定するロケーターに関連して決定される。位置は、モバイルロケーターからの入力情報および記憶されたデータベース情報を用いてシステムにより計算される。このシステムは、パーソナルハンディフォーンシステム(PHS)に関連して日本で使用された。
【0008】
GPSを用いないで位置を決定する他のスキームは、受信機における信号の到来の角度(AOA)または受信機における信号の到来の時間差(TDOA)を使用する。
【0009】
ネットワークベースの到来角スキームは、信号2つ以上の固定アンテナサイトに到来する角度を決定することにより、移動局(例えば携帯電話、無線通信機能を有したパーソナルデジタルアシスタント、無線通信機能を有したポータブルコンピューター、ページャーまたは他のパーソナル通信装置)の位置を決定する。例えば、各サイトにおける信号方向または到来角は、そのサイトにおける単一の固定アンテナの異なるエレメントにおける入力信号の到来時間の差から決定することができる。例えば、2つのエレメントフェーズアレイアンテナは、60度と−60度との間の角度をカバーするために使用することができる。6つのエレメントフェーズアレイアンテナは、エレメントの2つのペアを有した3つのアンテナに等しいが、360度をカバーすることができる。通信ネットワーク内の機器は、複数のサイトからの角度データを結合し、移動局の位置を決定する。移動局と固定アンテナとの間の適切な角度測定および幾何学的関係は位置測定に影響を与える可能性がある。2つの固定アンテナ間の中間点に対する移動局の近接は重大な位置測定エラーを生じる可能性がある。このため、AOA測定を行う際に3つ以上のアンテナサイトを使用することが望ましい。
【0010】
位置を決定する到来時間差スキームは、少なくとも2つのアンテナサイトに対して無線信号の到来の時間差を測定する別のネットワークベースの解決法である。電磁波の速度および周知の送信時間および受信時間を用いて、固定アンテナと移動局との間の距離を決定することができる。処理された情報は経度と緯度の位置測定値に変換される。適切にTDOAを計算するために必要な同期化されたクロック情報の精度は正確な位置測定に重要である。同期化された正確なクロックはときとしてTDOA測定において問題になる可能性がある。TDOA位置測定はそれの結果として損害を被る可能性がある。単なるマイクロ秒クロックエラーは、位置測定において数¥メートルのエラーに寄与する可能性がある。
【0011】
また、フォワードリンク三辺測量は位置を決定するために採用することができる。それにより、基地局アンテナから移動局への信号到来の時間差は、少なくとも2つのアンテナから移動局に送信されている擬似ランダム雑音コード化信号間の位相差を測定することにより計算することができる。このスキームは符号分割多重アクセス(CDMA)システムに特に有効である。進歩したフォワードリンク三辺測量(AFLT)は、このスキームの変形であり、この場合、移動局と基地局は役割を逆にする。AFLTにおいて、移動局の位置は、移動局からの送信を受信する基地局に関連して固定される。AFLTにおいて、移動局は異なるパイロット位相雑音のCDMA位相オフセットを測定し、それらをネットワークの位置決定エンティティに報告する。位置決定エンティティは異なるパイロット位相測定を使用してフォワードリンク三辺測量を実行し報告するエンティティのための測位を計算する。
【0012】
フィンガープリント法は移動局の位置を決定するための別のアプローチを提供する。信号送信エリアにおける種々の領域に関連する無線周波数信号特性はデータベースに収集される。領域のための信号特性の各グルーピングはフィンガープリントとして知られている。移動局の位置は、移動局により収集されたRFデータサンプルをデータベース内のフィンガープリントデータと比較することにより決定される。この比較は移動局においてまたはフィンガープリントデータを保持するサーバーにおいて行うことができる。収集されたフィンガープリントデータは、送信機から受信機への間接的な信号経路を介して生じるマルチパス信号の収集の利益を享受する。他の位置識別技術に関連する多くの問題に制約されないけれども、フィンガープリンティングは、データ収集においてかなりの作業を必要とし、それゆえ非常に人口の多い、集中した大都市のみに対して経済的に実現可能である。
【0013】
従って、上述したように、多数の個々の位置決定スキームが技術的に知られている。これらのスキームは、移動局支援モード(MS支援モード)と移動局ベース/スタンドアロンモード(MSベース/スタンドアロンモード)に広く分類することができる。MS支援モードにおいて、移動局の位置は一般にネットワーク/位置決定エンティティ(PDE)と呼ばれるコンピューターにより決定される。このコンピューターは通信ネットワークに接続される。PDEは上に概説した方法論の1つ、例えば、TDOA、AOA、ESS等を採用することができる。MSベース/スタンドアロンモードにおいて、移動局は移動局において入手可能なデータを用いてプロセッサーを用いてその固有の位置標定を計算する。MSベース/スタンドアロンシステムの一例は、移動局がGPS受信および処理能力を備えており、移動局において受信されたGPS信号に基づいてその位置を決定する。位置決定の個々のスキームは、異なるタイプのエラーの影響を受けやすい異なるエレメント/リソースに依存する。例えば、ネットワーク接続は、選択されたスキーム(GPA、GPSプラスAFLT等)に関わらずすべてのGPS MS支援方法において必要である。たとえGPS測定が優秀であっても、ネットワーク接続が失敗するなら、MS支援方法は失敗することになる。それゆえ、このインスタンスにおいて、スタンドアロン方法論はよりよい位置推定を提供するであろう。
【0014】
位置を決定するための上述のスキームの各々は、上で述べたように時々不正確になりまたは利用できないかもしれない。従って、任意のこれらの周知の位置決定スキームを使用した移動局またはネットワークは、移動局の現在の位置を決定するように求められたとき何らの結果も得ることができないかもしれないしまたは不正確な結果を得るかもしれない。それゆえ、より大きな信頼度で移動局の位置をより確実に決定するための方法を編み出す必要性が存在する。
【発明の概要】
【0015】
開示された1つの観点はモバイル装置の位置を決定する方法を提供する。この観点による方法は、位置決定の第1のスキームを用いて移動局の位置を決定すること、および第1のスキームが受け入れ可能な位置結果を生じないなら、(i)反復が受け入れ可能な位置結果を返すまでまたは(ii)すべての利用可能な位置決定スキームが使用されるまで少なくともいくつかの反復において、第1のスキームとは異なる位置決定の少なくとも1つのさらなるスキームを用いて前記決定することを反復することを含む。前記方法において使用される異なるスキームは、位置結果の基礎として異なる信号の測定または信号特性の異なる測定を使用してもよい。これらの異なるスキームのすべてが受け入れ可能な位置結果を返すことができないという可能性はない。従って、システムの信頼性は改善される。実際には、この方法は、優勢な状態の下で受け入れ可能な結果を与える位置決定スキームを選択する。条件が要求することに応じてシステムは動的にスキームを切り替える。
【0016】
さらなる観点は、複数の異なるスキームに従って移動局の位置決定を行うことと、各位置決定スキームに対してエラーの推定値を決定することとを含む、移動局の位置を決定する方法を提供する。この観点に従う方法は、さらに最小のエラー推定値を有する1つの位置決定方法を選択することと、選択された位置決定により提供される位置結果を移動局の位置として選択することとを含んでいてもよい。この方法は、優勢な状態の下で最良の利用可能な結果を与える位置決定スキームを効率的に選択するので、繰り返して言うが、変化する条件に適合するようにシステムは動的にスキームを切り替える。あるいは、この観点に従う方法は、例えば位置結果の加重平均を計算することにより、複数の位置結果を結合することにより前記移動局の位置を計算することを含んでいてもよい。
【0017】
さらなる観点はモバイル装置の位置をつきとめるためのモバイル装置とシステムを提供する。
【図面の簡単な説明】
【0018】
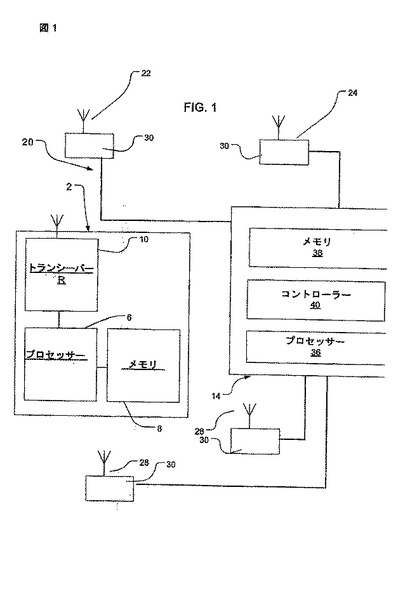
【図1】図1はシステムの一実施形態の機能ブロック図である。
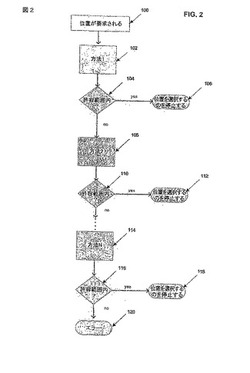
【図2】図2は位置決定を行う方法を描くフローチャートである。
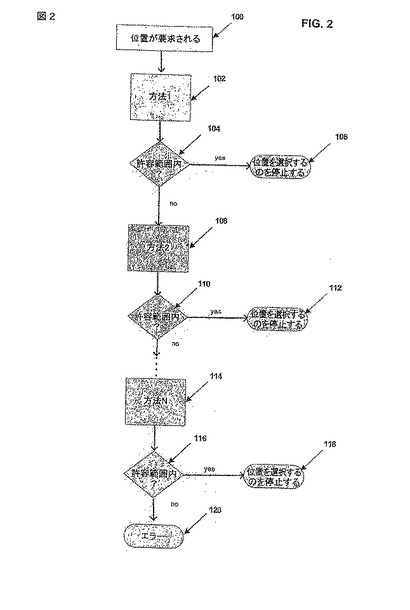
【図3】図3は位置決定を行う方法を描くフローチャートである。
【図4】図4は位置決定を行う方法を描くフローチャートである。
【図5】図5はネットワーク4と移動局2との相互作用のブロック図を示す。
【発明を実施するための形態】
【0019】
図1は、機能ブロック図の形式で、移動局2と通信ネットワーク20と関連する位置決定エンティティ(PDE)14を含むシステムを図解する。
【0020】
移動局2は、プロセッサー6、メモリ8およびトランシーバー(送信機/受信機)10を含む。ここに使用されるように、「トランシーバー」という用語は送信機能と受信機能を実行するであろうコンポーネントの任意の集合を指す。従って、トランシーバー10は両方の機能において使用される共通のコンポーネントを含んでいてもよくまたは送信機能と受信機能を実行する完全に別個のコンポーネントを含んでいてもよい。トランシーバー10はネットワーク20と通信するのに適切な信号を送信し受信することができる。
【0021】
トランシーバーはプロセッサー6に接続されているので、プロセッサーはトランシーバーの動作を制御することができ、また、プロセッサーはデータを通信ネットワーク20に送信することができ、トランシーバーを介して通信ネットワークからデータを受信することができる。また、移動局2は典型的にユーザー通信およびユーザー制御のためのコンポーネント(図示せず)を含む。例えば、移動局が携帯電話である場合、移動局は、プロセッサーの制御の下にトランシーバーにリンクされた一般的なマイクロフォンとスピーカー、およびデータを入力し表示するための一般的なキーパッドとディスプレイ(図示せず)を含むであろう。描かれた特定の実施形態において、トランシーバー10は全地球測位システム(GPS)信号を受信することができ、プロセッサー6は、メモリ8に記憶されたソフトウエアを用いてGPS信号に基づいて位置結果を導き出すことができる。また、プロセッサー6も、例えば受信されそのような結果に到達するのに使用される衛星信号の数として、位置結果における期待されるエラーに関連するパラメーターを決定するように構成される。
【0022】
ネットワーク20は、さまざまな位置における携帯電話タワー22、24、26、28のような複数の基地局を含む。各基地局は、信号特性を監視するためのまたは少なくとも1つの個々の位置決定スキームにおいて必要とされる予め選択された特性の信号をブロードキャストするための機器30を含む。例えば、基地局は、到来角決定スキームにおいて動作するように構成されてもよい。この場合、各基地局における機器30は、各局にフェーズアレイアンテナを含み、異なるエレメントにおいて到来時間における差を測定することができる回路を含む。
【0023】
あるいは又はさらに、基地局は到来時間監視スキームにおいて動作するように構成されてもよい。この場合、各基地局における機器30は、ネットワーク全体に広がるマスタークロックまた、そのようなネットワーク全体に広がるマスタークロックと同期されたローカルクロックを用いて局における信号の到来時間を監視するための一般的な装置を含むであろう。従って各局において決定された到来時間はほかのすべての局において決定された到来時間と比較することができる。
【0024】
また、各基地局における機器30は、位置決定スキームに使用する信号の適合性に関連する信号パラメーターを測定する機器を含んでいてもよい。例えば、到来時間または到来角スキームで使用される機器30は、受信された信号の強度を測定するための機器を含んでいてもよい。
【0025】
位置決定エンティティ(PDE)14は基地局22、24、26、28に接続された1つ以上のコンピュータープロセッサー36と、これらのプロセッサーに接続されたメモリ38を含む。メモリ36は、ネットワークコンポーネントにおいて実施される各個々の位置測定スキームに対して位置結果を導きだすために必要とされる機能を実行するようにプロセッサー36に命令するソフトウエアを保持する。例えば、ネットワークが到来時間スキームを実施する場合、メモリは、基地局の物理的位置を表すデータおよび種々の基地局における到来時間における差および基地局の位置に基づいて一般的な方法で位置結果を計算する命令を含んでいてもよい。
【0026】
図2乃至図4に関連して以下にさらに説明されるように、PDEプロセッサー36はまた異なるスキームを用いて導き出された複数の結果から1つの位置決定スキームにより決定される1つの位置結果の選択に基づいて、またはそのような複数の結果の結合に基づいて位置を決定する機能を実行する。ここでは、コントローラーと呼ばれるこれらの機能を実行するプロセッサーのエレメントは40において別個の機能エレメントとして示される。
【0027】
プロセッサーのこの部分は他の機能に対して使用されるのと同じ物理構造を含んでいてもよく、または別個の物理構造を含んでいてもよい。コントローラーはメモリ38に記憶された命令とデータに従って動作する。また、プロセッサー36とメモリ38は物理的に分散していてもよい。例えば、メモリ38は通信ネットワーク20または他の公衆またはプライベートネットワーク(図示せず)、例えばインターネットを介してプロセッサーにリンクされてもよい。プロセッサーのエレメントはまた、物理的に分散していていもよくおよび任意の適切な方法でリンクされていてもよい。
【0028】
図2は、図1を参照して上述したシステムを用いて位置決定を行う方法を描くフローチャートを図解する。PDE14が移動局2の位置を決定するための要求を受信すると方法が開始する(ステップ100)。そのような要求は移動局においてユーザーコマンドとして入力されてもよく、または他のソースにより開始されてもよい。例えば、システムが公安応答ポイント(PSAP)にリンクされた携帯電話システムである場合、要求はPSAPから来るかもしれない。または、移動局がPSAPと通信しているときはいつでも、例えば米国において移動局ユーザーが「911」をダイアルするとき、自動的に開始されてもよい。
【0029】
PDEはコマンドを基地局、移動局または両方に送信してデータを収集し第1の位置決定スキームに従って位置結果を導き出す(ステップ102)。第1のスキームにより返された位置結果は次に1つ以上の所定の基準に従って受容性に対して試験される。例えば、第1のスキームが一般的なGPSロケーションである場合、PDEは移動局2のプロセッサー6に移動局において受信されたGPS信号に基づいて移動局の位置を導き出すように試みることを、および結果を導き出すのに受信され使用される衛星信号の数を示すデータのような、結果の品質を示すデータと共にネットワーク20を介して導き出された位置結果をPDE14に通信するように命令してもよい。
【0030】
PDEは結果を導き出すのに使用される衛星信号の数に基づいて受け入れ基準を適用してもよい。例えば、基準は、4つ以上の衛星信号を用いて導き出された結果が受け入れ可能であることを指定するようにしてもよいのに対して、3つの衛星信号を用いて導き出された位置結果は受け入れ可能ではなく、位置が決定できないことを示す位置結果も受け入れ可能でない。
【0031】
別のシナリオにおいて、ユーザーが道に迷ってしまい、プロセッサー6がMSベース/スタンドアロンGPS方法論を使用する位置決定を行使することにより自分の位置をつきとめるかもしれない。しかしながら、信号が利用できない、または弱いGPS信号により、MSベース/スタンドアロン方法は失敗するかもしれない。移動局2は、測位を取得する確率を増加させるために、GPS測定に加えてAFLT測定、すなわち、MS支援モードをしようする方法をしようするようにプロセッサー6に指示することができる。
【0032】
あるいはまたはさらに、エラーの直接推定値が位置結果に含まれているかもしれない。例えば、位置結果は、精度表示と一緒にまたはエラー推定値プラスまたはマイナスフィーとまたはメートルと一緒に緯度と経度の観点から表してもよい。位置結果を導き出すために必要とされる最小数より多くの衛星信号を用いたGPS結果の場合に、モバイルユニットのプロセッサーまたはPDEは、利用可能な衛星信号の種々のサブセットから導き出された位置結果を比較することによりエラーの推定値を取得してもよい。
【0033】
受容性の基準は、受け入れ可能な許容誤差が±75フィートであることを含んでいてもよい。この場合、±50フィートのエラーの推定値を伴う返された結果は、±75フィートの許容範囲内なので受け入れ可能であると発見するであろう。それに対して、±75フィートのエラー推定値を伴う位置結果は受け入れ可能でないと発見されるであろう。
【0034】
適用されてもよいさらに他の基準は、移動局の従前に決定された位置と比較される。メモリ38は、以前に決定されたモバイルユニット2の位置およびそのような以前の決定の時間を表す歴史的位置データを保持することができる。最後の決定は受け入れ可能ではないとみなされるので、受け入れ基準は、位置結果が単位時間あたりのしきい値制限より大きい従前に決定された位置とは異なるように基準を含んでいてもよい。
【0035】
例えば、GPSスキームにより返される位置結果が、2秒前に決定された位置から10マイルの位置におけるグラウンドベース移動局を示すなら、そのような結果は受け入れ不可能と判断してもよい。このアプローチの変形において、一緒に近接して得られる位置決定は、一緒に平均化してもよく、移動平均を計算しまたは互いに比較して移動局の平均速度を確立してもよい。
【0036】
上述の基準のいずれかまたはすべて、および他の基準はステップ104において適用されてもよい。
【0037】
第1のスキームにより返された位置結果が受け入れ可能なら、PDE14はその結果を移動局の位置として選択する(ステップ106)。受け入れられた結果は、PDEにより、PSAP又は任意の他の適切なデスティネーションに、この方法により決定された位置として通信され、この方法は終了する。決定された位置は緯度と経度の形式で表されても良くまたはストリートアドレスまたはマップグリッドロケーションまたは任意の他の適切な形式に変換されてもよい。
【0038】
しかしながら、第1のスキームにより返された位置結果が受け入れ可能でないなら、この方法はステップ108に分岐する。このステップにおいて、PDE14は、基地局および/または移動局に対して第1の位置決定スキームとは異なる第2の位置決定スキームを実行するように命令する。
【0039】
例えば、第1の位置決定スキームがGPSを使用したなら、第2の位置決定スキームは到来時間差を使用してもよい。さまざまな基地局22、24、26、28における信号到来の時間は決定されてPDE14に通信される。PDE14はこれらの時間差に基づいて位置結果ユニットを計算する。繰り返して言うが、PDE14に報告された情報またはPDE14においてコンパイルされた情報は、信号を受信する基地局の数、種々の基地局において受信される信号の強度等のような、位置結果を導き出すために使用される信号測定についてのデータを含んでいてもよく、また、状況に応じて位置結果におけるエラーの直接推定値を含んでいてもよい。繰り返して言うが、コントローラーは位置結果を受け入れ基準と比較し、第2のスキームにより返された位置結果が受け入れ可能かどうかを決定する(ステップ110)。
【0040】
このステップにおいて適用された基準は、ステップ104に関連して上述したのと同じ基準のいくつかまたはすべてを含んでいてもよく、又はこれらの変形を含んでいてもよい。例えば、到来スキームの時間差において、受け入れ基準は、少なくとも3つの基地局においてある最小の信号強度を結う知る信号の受信のための要件を含んでいてもよい。第2の位置決定スキームにより返される位置結果が受け入れ可能なら、コントローラー40はその位置結果を、この方法により決定された位置として選択し、その位置をステップ106に関連して上述した方法と同じ方法で通信する(ステップ112)。
【0041】
第2のスキームにより返された位置結果が受け入れ可能でないなら、プロセスは、位置結果を導き出すさらなる異なるスキームを用いた位置を導き出すステップのさらなる反復を用いて、および上述したのと同じ方法で受け入れ可能な位置結果が発見されて通信されるまで(ステップ118)、またはシステムに含まれる機器を用いた可能なnの位置決定スキームのすべてが使用されるまで受容性のさらなる決定(ステップ116)を用いて、継続する。受け入れ可能な位置結果を返さずにn番目のスキームが完了するなら、コントローラー40はエラーメッセージを返し(ステップ120)し、この方法は終了する。
【0042】
変形において、方法が異なるスキームを使用する順番は、達成される結果に基づいて調節されてもよい。上述したステップのシーケンスにおいて特定のスキームが受け入れ可能な結果を与えるように発見されるなら、そのスキームは使用順序の第1番目に配置されてもよい。従って、別の位置要求がPDE14により受信され、上述したステップのシーケンスが再び開始されるなら、そのスキームは第1の位置決定ステップにおいて使用されるであろう。そのようなスキームは受け入れ可能な結果を与える可能性がある。第1のスキームとして以前に成功したスキームを使用することにより、システムは受け入れ可能なスキームを発見する前に複数のスキームを介して「捜索する」回数を最小にする。
【0043】
変形において、この方法は、エラーメッセージを返す代わりに、またはエラーメッセージを返すことに加えて再び開始してもよい(ステップ102に戻る)。さらなる変形において、受け入れ可能な位置結果を発見せずにすべてのnの方法が使用された場合には、システムは、利用可能な結果の中から最良の位置を選択してもよい。例えば、位置結果のすべてが、エラーの推定値を表すデータを伴う場合、システムは最も小さいエラーの推定値に関連する位置結果を選択してもよく、その結果を通信してもよい。
【0044】
他の実施形態に従う方法において、コントローラー40はシステムのコンポーネントを作動してすべてのNの位置決定スキームを並列に実行し、返された位置結果の中から1つの位置結果を選択する。図3はこの方法を描くフローチャートを図解する。
【0045】
nのスキームに従う位置決定は並列に実行される(ステップ202、204、206)。
【0046】
各位置結果は、上述したあらかじめ選択された受容性基準に対してテストされ(ステップ208、210、212)、受け入れ可能でない結果は破棄される。受け入れ可能な結果は比較され(ステップ214)、メリット(merit)のあらかじめ決定された基準に従って最良の結果が選択される(ステップ216)。例えば、結果がエラーの推定値を伴う場合、最も低く推定されたエラーに関連する結果が選択される。
【0047】
あるいは、コントローラーは、そのような結果に関連する条件の間の周知のまたは仮定された関係および結果の精度に基づいてエラーの推定値または性能指数を各結果に割り当ててもよい。例えば、コントローラーは、4つの基地局における到来角から導き出された結果に(低いエラー推定値のような)より好ましい性能指数を割り当ててもよいし、3つの基地局において受信された信号に基づいて到来角結果に(高い推定値エラーのような)より好ましくない性能指数を割り当ててもよい。選択された位置結果は、方法により決定された位置として通信される(ステップ220)。
【0048】
この方法の変形において、各結果の受容性を決定し、受け入れ不可能な結果を破棄するステップ(ステップ208−212)は省略され、すべての結果はエラー推定値または他の性能指数との比較ステップに渡される。
【0049】
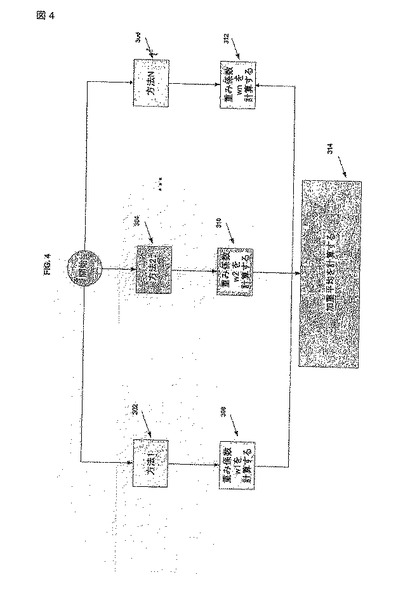
他の実施形態に従う方法において、(図4)複数の位置結果が異なる位置決定スキームを用いて取得され(ステップ302−306)、推定値または他の性能指数が上述した方法で結果ごとに決定される(ステップ308−312)。各位置結果は、エラーの推定値(精度推定値)において具現化される信頼度の規定された基準または他の性能指数を有したランダム変数として見なされる。この信頼度の基準に従って種々の個々の結果に異なる重み付けをする結合アルゴリズムを用いて種々の結果が互いに結合され(ステップ314)結合された結果を生じる。
【0050】
1つのそのような結合アルゴリズムにおいて、信頼度のレベルに従って重み付けされた平均値はこれらの位置ランダム変数に対して計算される。例えばn(nは整数)の異なるスキームw1, w2,...wnにより取得された読み取り値が各位置結果に帰属する重み係数を表し、x1, x2,...,xnが位置結果を表すなら、重み係数は以下のように表すことができる。w1x1+w2x2+w3x3(w1+w2+w3)。
【0051】
高い精度表示を有した位置測定により大きな重みを与えるために、(逆に言えば、最も小さな信頼度を有した測定により小さな重みを与えるために)、精度表示の逆数が加重平均の計算において重み係数として使用することができる。従って、x1が±5フィーとの精度を有するなら、x2は±50フィーとの精度を有し、x3は、±10フィーとの精度を有し、重み係数w1, w2, w3はそれぞれ、0.2、0.02、0.1の値を有するであろう。x1に最大の重み量が与えられ、次にx2にその次の重み量が与えられ、次に、x3にその次の重み量が与えられる。重み係数は他の方法を用いて計算することができる。例えば、精度表示の逆数の二乗は重み係数に使用することができる。
【0052】
さらに他の実施形態において、上述した位置標定方法論は、移動局によっておよび/または移動局と協働するネットワーク/PDEにより実施することができる。
【0053】
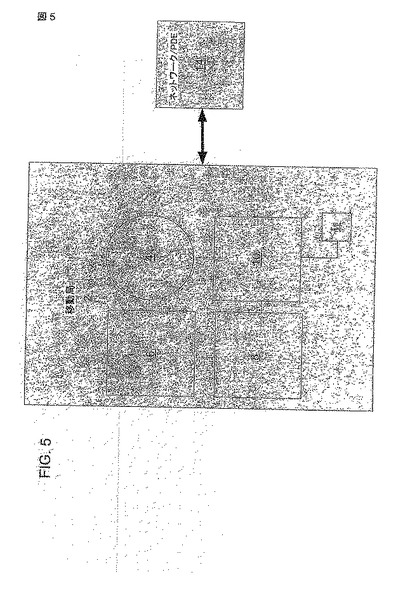
図5は、ネットワーク/PDEと移動局との相互作用のブロック図を図解する。移動局2は位置決定モードマルチプレクサー4、プロセッサー6、メモリ8、トランシーバー(送信機/受信機)10およびディスプレイ11を含む。1つの観点において、移動局2は、プロセッサー6により指示されたネットワーク/PDE方法を用いてあらかじめ指定した許容範囲内で位置を決定しようと試みるであろう。位置決定があらかじめ指定された許容範囲を達成していないなら、マルチプレクサー4は他の位置決定方法を用いて適切な精度の測位を取得するために動的にモードを切替る。
【0054】
スイッチ4により選択された位置標定モードは、移動局に基づいて方法論を採用することができる。すなわち、ネットワーク/PDE14と通信するためにトランシーバーを用いてMSベース/スタンドアロンモード(例えば、GPS)またはMS支援モードに基づいた方法論を採用することができる。二重矢12はMS支援モード動作の場合の移動局とネットワーク/PDEとの相互作用を意味する。この発明の一実施形態において、移動局のために決定される位置に関連して、場所が移動局2のディスプレイ11上に示すことができる。あるいは、位置をネットワーク/PDE14に送ることができ、及び/又はネットワーク/PDE14において決定することができる。
【0055】
メモリ8は歴史的位置決めデータを保持することができる。プロセッサー6はマルチプレクサー4の動作を指示するようにプログラムされる。メモリ8における以前の移動局の位置読み取り値の記憶と一緒に、所定の期間内に、現在の位置読み取り値がしいきい値制限を越えて変化するな、それは、位置測定において重大なエラーを示しているかもしれない。プロセッサー6は他の方法により移動局の位置の決定を必要とする応答を提供することができる。例えば、2秒後に、移動局が10マイル移動するなら、特に移動局2が地上ベースの場合、この決定は誤っている可能性がある。あるいは、メモリ8は移動平均を計算するように、時間内に緊密に採取された位置決定が一緒に平均化することを可能にすることができる。これは、時間に対する位置の変化に関して平滑作用を提供するけれども、この方法はいくつかのエラーを導入する可能性がある。位置決定のいくつかのアプリケーションの場合、このエラーは受け入れてもよい。
【0056】
移動局位置決定は、各方法が1つ以上のスキームから構成される異なる方法を選択することにより成就することができる。例えば、GPS MS支援方法は、GPSまたはAFLTと結合されたGPSを構成することができる。ネットワークベース方法は、TDCOAまたはAOAまたは両方の組み合わせを含むことができる。一方、GPS MSベース/スタンドアロン方法は、例えばGPSのみを使用してもよい。
【0057】
いくつかの理由で特定の位置決定方法が失敗するなら移動局の位置決定を行う一般的な試みは完全に失敗する。この発明による移動局位置決定は、いくつかの理由で移動局の位置を決定することに失敗するかもしれない特定のスキームとは異なるまたは特定のスキームに加えて異なる位置決定スキームを含む方法論を可能にする。
【0058】
それにより成功した位置決定スキームの可用性は、一般的な方法に比べて、この発明を用いて増加する。さらに、この発明は、同じスキームを用いて、さもなければ失敗したであろうリソースとは異なる位置決定のためのリソースの使用を可能にする。
【0059】
この発明は、特定の実施形態を参照して記載されたけれどもこれらの実施形態は、特定の原理およびアプリケーションを単に例証することが理解されるべきである。例えば、図1−図4に関連して参照された特定の位置決定スキームは単に例証である。多くの個々の位置決定スキームのいずれかを使用することができる。例えば、複数の基地局からの信号の到来時間を使用する三辺測量を使用することができる。望ましくは、種々の位置決定スキームは、全体的または一部、信号特性の異なる物理測定、異なる信号またはその両方に依存する。また、上述した例においてPDE36またはコントローラー40により実行される機能は、全体的にまたは一部、移動局2のエレメントにより実行することができる。別の言い方をすれば、移動局のプロセッサー6は、コントローラー40の機能を実行する機能エレメントを含むことができる。また、位置決定方法は、同時にまたはシーケンシャルに複数の移動局の位置を決定するように実行することができる。ここに記載された技術は、CDMAシステムだけではなく、時分割多重アクセス(TDMA)システム、周波数分割多重アクセスシステム(FDMA)または空間分割多重アクセス(SDMA)システムのような必須的に任意のネットワークにおいて実施することができる。それゆえ、添付されたクレームにより定義されるこの発明の精神および範囲を逸脱することなく、実施形態に対して多くの変更を行ってもよく、他の構成を考案してもよいことが理解されるべきである。
【背景技術】
【0001】
近年、人、乗り物等の位置をつきとめる能力はより重要になってきた。特に、安全性とセキュリティに対して新しい技術が導入され関心が増加している観点から重要である。人または乗り物は、人または乗り物により運ばれる移動無線装置の位置を決定することにより位置をつきとめることができる。例えば、緊急を報告するために使用される個々の携帯電話の地理的位置を決定し、それによりそのような位置が警察機関、消防機関、救急車サービスのような緊急応答作業者に報告できる能力を有した携帯電話システムを提供することが望ましい。
【0002】
地球上の人の位置を決定するためのいくつかのスキームが利用可能である。位置を決定するためのひとつの方法は、全地球測位システム(GPS)の使用を含む。GPSはもともとは軍事ナビゲーションシステムとして米国国防総省によって着想され、開発された。時間とともに、システムの原理はますます民間の使用のために利用可能になった。
【0003】
GPSは地球静止軌道において、24の衛星のコンステレーションを使用し、それによりGPS衛星からGPS受信機へのタイミング衛星信号行路により位置を決定することができる。24の衛星の1つが故障した場合に、5つの予備の周回軌道衛星が主としてバックアップのために設けられている。衛星は2つの周波数バンドL1(1575.42MHz)およびL2(1223.6MHz)でスペクトル拡散信号を送信する。信号は2つの擬似ランダム雑音コード、すなわち、粗/獲得(C/A)コードと精度(P)コードにより変調される。L1バンド内のC/Aコードは民間の応用に関係のあるコードである。さらに、GPS信号は、GPSナビゲーションメッセージと一般に呼ばれるデータメッセージで変調される。
【0004】
典型的には、GPS受信機は、測位精度を得るために三辺測量スキームを採用する。例えばGPS生成位置は、2次元の三辺測量を用いて遂行することができる。例えば、3つの衛星からの信号を用いて3つの交差する円の交点に基づいて位置を決定することができる。特に、各衛星信号は、GPS受信機が位置することができる半径を提供することができる。2つの交差する半径は、交点の面積に対して位置決定が狭められるようにすることが可能である。3つの半径すべてが一点で交差しなければならないので、他の衛星信号はGPSの位置を示す第3の半径を提供することができる。上述の概念を3次元三辺測量に拡張すると、各衛星信号を用いて球体を示すことができ、それにより3つの交差する球体を用いて高度情報を含む位置を決定することができる。より多くの衛星信号を使用することができ、典型的には、精度を改善するために使用される。
【0005】
GPS受信機において、衛星信号は、擬似ランダム雑音コードでマッチングされ同期化された後で復調される。GPS受信機はGPSナビゲーションメッセージを用いてGPS衛星の座標に加えて衛星信号経過時間を計算する。GPS受信機による位置測定は典型的に15メートル(50フィート)以内で遂行することができる。しかしながら、これらの計算の精度は、測定精度および衛星配置に依存する。大気条件は電離層の遅延を生じることがある。さらに、明らかに衛星軌道は時間に対して劣化するので、衛星軌道における不確実性はエラーに寄与する可能性がある。GPSデータを使用する位置表示に対する信頼は、今日の環境における治安関係を考慮するとさらに問題になり得る。
【0006】
GPSに関連する利用可能性に対処するために、サーバー支援GPSが1990年代後半に導入された。静止サーバーコンピューターには、GPS衛星信号を受信するための静止GPS受信機が備えられている。静止GPS受信機は、すべての可視のGPS衛星からの信号の連続した監視を可能にするために空の全景を有するアンテナと関連する。モバイルGPSステーションとの通信を可能にするために無線インターフェースは各サーバーを備えています。モバイルGPSユニットの位置についての位置クエリーに関連して、サーバーは、静止GPS受信機から取得したGPS衛星情報をモバイルGPSユニットに送信する。この情報は、モバイルGPS受信機が同期することを可能にし、擬似ランダム雑音コードをGPS衛星の擬似ランダム雑音コードと一致させることを可能にする観察可能なGPS衛星とデータのリストを含む。モバイルGPS受信機は収集したGPSデータをサーバーに送信する。次に、サーバーはモバイルGPSおよび静止GPSにより提供されたデータからモバイルGPS受信機の位置を計算する。このスキームが非サーバー支援GPSに対してより高い精度を可能にする間に、衛星信号の可用性は依然として正確な位置を獲得する際に問題を生じる可能性がある。
【0007】
機能強化された信号強度(ESS)システムはGPS独立した位置標定スキームを採用する。ビルディング、建造物および他の障害物を含む地形をカバーする3次元情報は、関心のある所定の地理的領域において無線送信アンテナの無線周波数信号伝搬特性をモデル化するために収集される。モデリングの結果はデータベースに記憶される。モバイルロケーターの位置は、多数の無線送信機からの信号の信号強度を測定するロケーターに関連して決定される。位置は、モバイルロケーターからの入力情報および記憶されたデータベース情報を用いてシステムにより計算される。このシステムは、パーソナルハンディフォーンシステム(PHS)に関連して日本で使用された。
【0008】
GPSを用いないで位置を決定する他のスキームは、受信機における信号の到来の角度(AOA)または受信機における信号の到来の時間差(TDOA)を使用する。
【0009】
ネットワークベースの到来角スキームは、信号2つ以上の固定アンテナサイトに到来する角度を決定することにより、移動局(例えば携帯電話、無線通信機能を有したパーソナルデジタルアシスタント、無線通信機能を有したポータブルコンピューター、ページャーまたは他のパーソナル通信装置)の位置を決定する。例えば、各サイトにおける信号方向または到来角は、そのサイトにおける単一の固定アンテナの異なるエレメントにおける入力信号の到来時間の差から決定することができる。例えば、2つのエレメントフェーズアレイアンテナは、60度と−60度との間の角度をカバーするために使用することができる。6つのエレメントフェーズアレイアンテナは、エレメントの2つのペアを有した3つのアンテナに等しいが、360度をカバーすることができる。通信ネットワーク内の機器は、複数のサイトからの角度データを結合し、移動局の位置を決定する。移動局と固定アンテナとの間の適切な角度測定および幾何学的関係は位置測定に影響を与える可能性がある。2つの固定アンテナ間の中間点に対する移動局の近接は重大な位置測定エラーを生じる可能性がある。このため、AOA測定を行う際に3つ以上のアンテナサイトを使用することが望ましい。
【0010】
位置を決定する到来時間差スキームは、少なくとも2つのアンテナサイトに対して無線信号の到来の時間差を測定する別のネットワークベースの解決法である。電磁波の速度および周知の送信時間および受信時間を用いて、固定アンテナと移動局との間の距離を決定することができる。処理された情報は経度と緯度の位置測定値に変換される。適切にTDOAを計算するために必要な同期化されたクロック情報の精度は正確な位置測定に重要である。同期化された正確なクロックはときとしてTDOA測定において問題になる可能性がある。TDOA位置測定はそれの結果として損害を被る可能性がある。単なるマイクロ秒クロックエラーは、位置測定において数¥メートルのエラーに寄与する可能性がある。
【0011】
また、フォワードリンク三辺測量は位置を決定するために採用することができる。それにより、基地局アンテナから移動局への信号到来の時間差は、少なくとも2つのアンテナから移動局に送信されている擬似ランダム雑音コード化信号間の位相差を測定することにより計算することができる。このスキームは符号分割多重アクセス(CDMA)システムに特に有効である。進歩したフォワードリンク三辺測量(AFLT)は、このスキームの変形であり、この場合、移動局と基地局は役割を逆にする。AFLTにおいて、移動局の位置は、移動局からの送信を受信する基地局に関連して固定される。AFLTにおいて、移動局は異なるパイロット位相雑音のCDMA位相オフセットを測定し、それらをネットワークの位置決定エンティティに報告する。位置決定エンティティは異なるパイロット位相測定を使用してフォワードリンク三辺測量を実行し報告するエンティティのための測位を計算する。
【0012】
フィンガープリント法は移動局の位置を決定するための別のアプローチを提供する。信号送信エリアにおける種々の領域に関連する無線周波数信号特性はデータベースに収集される。領域のための信号特性の各グルーピングはフィンガープリントとして知られている。移動局の位置は、移動局により収集されたRFデータサンプルをデータベース内のフィンガープリントデータと比較することにより決定される。この比較は移動局においてまたはフィンガープリントデータを保持するサーバーにおいて行うことができる。収集されたフィンガープリントデータは、送信機から受信機への間接的な信号経路を介して生じるマルチパス信号の収集の利益を享受する。他の位置識別技術に関連する多くの問題に制約されないけれども、フィンガープリンティングは、データ収集においてかなりの作業を必要とし、それゆえ非常に人口の多い、集中した大都市のみに対して経済的に実現可能である。
【0013】
従って、上述したように、多数の個々の位置決定スキームが技術的に知られている。これらのスキームは、移動局支援モード(MS支援モード)と移動局ベース/スタンドアロンモード(MSベース/スタンドアロンモード)に広く分類することができる。MS支援モードにおいて、移動局の位置は一般にネットワーク/位置決定エンティティ(PDE)と呼ばれるコンピューターにより決定される。このコンピューターは通信ネットワークに接続される。PDEは上に概説した方法論の1つ、例えば、TDOA、AOA、ESS等を採用することができる。MSベース/スタンドアロンモードにおいて、移動局は移動局において入手可能なデータを用いてプロセッサーを用いてその固有の位置標定を計算する。MSベース/スタンドアロンシステムの一例は、移動局がGPS受信および処理能力を備えており、移動局において受信されたGPS信号に基づいてその位置を決定する。位置決定の個々のスキームは、異なるタイプのエラーの影響を受けやすい異なるエレメント/リソースに依存する。例えば、ネットワーク接続は、選択されたスキーム(GPA、GPSプラスAFLT等)に関わらずすべてのGPS MS支援方法において必要である。たとえGPS測定が優秀であっても、ネットワーク接続が失敗するなら、MS支援方法は失敗することになる。それゆえ、このインスタンスにおいて、スタンドアロン方法論はよりよい位置推定を提供するであろう。
【0014】
位置を決定するための上述のスキームの各々は、上で述べたように時々不正確になりまたは利用できないかもしれない。従って、任意のこれらの周知の位置決定スキームを使用した移動局またはネットワークは、移動局の現在の位置を決定するように求められたとき何らの結果も得ることができないかもしれないしまたは不正確な結果を得るかもしれない。それゆえ、より大きな信頼度で移動局の位置をより確実に決定するための方法を編み出す必要性が存在する。
【発明の概要】
【0015】
開示された1つの観点はモバイル装置の位置を決定する方法を提供する。この観点による方法は、位置決定の第1のスキームを用いて移動局の位置を決定すること、および第1のスキームが受け入れ可能な位置結果を生じないなら、(i)反復が受け入れ可能な位置結果を返すまでまたは(ii)すべての利用可能な位置決定スキームが使用されるまで少なくともいくつかの反復において、第1のスキームとは異なる位置決定の少なくとも1つのさらなるスキームを用いて前記決定することを反復することを含む。前記方法において使用される異なるスキームは、位置結果の基礎として異なる信号の測定または信号特性の異なる測定を使用してもよい。これらの異なるスキームのすべてが受け入れ可能な位置結果を返すことができないという可能性はない。従って、システムの信頼性は改善される。実際には、この方法は、優勢な状態の下で受け入れ可能な結果を与える位置決定スキームを選択する。条件が要求することに応じてシステムは動的にスキームを切り替える。
【0016】
さらなる観点は、複数の異なるスキームに従って移動局の位置決定を行うことと、各位置決定スキームに対してエラーの推定値を決定することとを含む、移動局の位置を決定する方法を提供する。この観点に従う方法は、さらに最小のエラー推定値を有する1つの位置決定方法を選択することと、選択された位置決定により提供される位置結果を移動局の位置として選択することとを含んでいてもよい。この方法は、優勢な状態の下で最良の利用可能な結果を与える位置決定スキームを効率的に選択するので、繰り返して言うが、変化する条件に適合するようにシステムは動的にスキームを切り替える。あるいは、この観点に従う方法は、例えば位置結果の加重平均を計算することにより、複数の位置結果を結合することにより前記移動局の位置を計算することを含んでいてもよい。
【0017】
さらなる観点はモバイル装置の位置をつきとめるためのモバイル装置とシステムを提供する。
【図面の簡単な説明】
【0018】
【図1】図1はシステムの一実施形態の機能ブロック図である。
【図2】図2は位置決定を行う方法を描くフローチャートである。
【図3】図3は位置決定を行う方法を描くフローチャートである。
【図4】図4は位置決定を行う方法を描くフローチャートである。
【図5】図5はネットワーク4と移動局2との相互作用のブロック図を示す。
【発明を実施するための形態】
【0019】
図1は、機能ブロック図の形式で、移動局2と通信ネットワーク20と関連する位置決定エンティティ(PDE)14を含むシステムを図解する。
【0020】
移動局2は、プロセッサー6、メモリ8およびトランシーバー(送信機/受信機)10を含む。ここに使用されるように、「トランシーバー」という用語は送信機能と受信機能を実行するであろうコンポーネントの任意の集合を指す。従って、トランシーバー10は両方の機能において使用される共通のコンポーネントを含んでいてもよくまたは送信機能と受信機能を実行する完全に別個のコンポーネントを含んでいてもよい。トランシーバー10はネットワーク20と通信するのに適切な信号を送信し受信することができる。
【0021】
トランシーバーはプロセッサー6に接続されているので、プロセッサーはトランシーバーの動作を制御することができ、また、プロセッサーはデータを通信ネットワーク20に送信することができ、トランシーバーを介して通信ネットワークからデータを受信することができる。また、移動局2は典型的にユーザー通信およびユーザー制御のためのコンポーネント(図示せず)を含む。例えば、移動局が携帯電話である場合、移動局は、プロセッサーの制御の下にトランシーバーにリンクされた一般的なマイクロフォンとスピーカー、およびデータを入力し表示するための一般的なキーパッドとディスプレイ(図示せず)を含むであろう。描かれた特定の実施形態において、トランシーバー10は全地球測位システム(GPS)信号を受信することができ、プロセッサー6は、メモリ8に記憶されたソフトウエアを用いてGPS信号に基づいて位置結果を導き出すことができる。また、プロセッサー6も、例えば受信されそのような結果に到達するのに使用される衛星信号の数として、位置結果における期待されるエラーに関連するパラメーターを決定するように構成される。
【0022】
ネットワーク20は、さまざまな位置における携帯電話タワー22、24、26、28のような複数の基地局を含む。各基地局は、信号特性を監視するためのまたは少なくとも1つの個々の位置決定スキームにおいて必要とされる予め選択された特性の信号をブロードキャストするための機器30を含む。例えば、基地局は、到来角決定スキームにおいて動作するように構成されてもよい。この場合、各基地局における機器30は、各局にフェーズアレイアンテナを含み、異なるエレメントにおいて到来時間における差を測定することができる回路を含む。
【0023】
あるいは又はさらに、基地局は到来時間監視スキームにおいて動作するように構成されてもよい。この場合、各基地局における機器30は、ネットワーク全体に広がるマスタークロックまた、そのようなネットワーク全体に広がるマスタークロックと同期されたローカルクロックを用いて局における信号の到来時間を監視するための一般的な装置を含むであろう。従って各局において決定された到来時間はほかのすべての局において決定された到来時間と比較することができる。
【0024】
また、各基地局における機器30は、位置決定スキームに使用する信号の適合性に関連する信号パラメーターを測定する機器を含んでいてもよい。例えば、到来時間または到来角スキームで使用される機器30は、受信された信号の強度を測定するための機器を含んでいてもよい。
【0025】
位置決定エンティティ(PDE)14は基地局22、24、26、28に接続された1つ以上のコンピュータープロセッサー36と、これらのプロセッサーに接続されたメモリ38を含む。メモリ36は、ネットワークコンポーネントにおいて実施される各個々の位置測定スキームに対して位置結果を導きだすために必要とされる機能を実行するようにプロセッサー36に命令するソフトウエアを保持する。例えば、ネットワークが到来時間スキームを実施する場合、メモリは、基地局の物理的位置を表すデータおよび種々の基地局における到来時間における差および基地局の位置に基づいて一般的な方法で位置結果を計算する命令を含んでいてもよい。
【0026】
図2乃至図4に関連して以下にさらに説明されるように、PDEプロセッサー36はまた異なるスキームを用いて導き出された複数の結果から1つの位置決定スキームにより決定される1つの位置結果の選択に基づいて、またはそのような複数の結果の結合に基づいて位置を決定する機能を実行する。ここでは、コントローラーと呼ばれるこれらの機能を実行するプロセッサーのエレメントは40において別個の機能エレメントとして示される。
【0027】
プロセッサーのこの部分は他の機能に対して使用されるのと同じ物理構造を含んでいてもよく、または別個の物理構造を含んでいてもよい。コントローラーはメモリ38に記憶された命令とデータに従って動作する。また、プロセッサー36とメモリ38は物理的に分散していてもよい。例えば、メモリ38は通信ネットワーク20または他の公衆またはプライベートネットワーク(図示せず)、例えばインターネットを介してプロセッサーにリンクされてもよい。プロセッサーのエレメントはまた、物理的に分散していていもよくおよび任意の適切な方法でリンクされていてもよい。
【0028】
図2は、図1を参照して上述したシステムを用いて位置決定を行う方法を描くフローチャートを図解する。PDE14が移動局2の位置を決定するための要求を受信すると方法が開始する(ステップ100)。そのような要求は移動局においてユーザーコマンドとして入力されてもよく、または他のソースにより開始されてもよい。例えば、システムが公安応答ポイント(PSAP)にリンクされた携帯電話システムである場合、要求はPSAPから来るかもしれない。または、移動局がPSAPと通信しているときはいつでも、例えば米国において移動局ユーザーが「911」をダイアルするとき、自動的に開始されてもよい。
【0029】
PDEはコマンドを基地局、移動局または両方に送信してデータを収集し第1の位置決定スキームに従って位置結果を導き出す(ステップ102)。第1のスキームにより返された位置結果は次に1つ以上の所定の基準に従って受容性に対して試験される。例えば、第1のスキームが一般的なGPSロケーションである場合、PDEは移動局2のプロセッサー6に移動局において受信されたGPS信号に基づいて移動局の位置を導き出すように試みることを、および結果を導き出すのに受信され使用される衛星信号の数を示すデータのような、結果の品質を示すデータと共にネットワーク20を介して導き出された位置結果をPDE14に通信するように命令してもよい。
【0030】
PDEは結果を導き出すのに使用される衛星信号の数に基づいて受け入れ基準を適用してもよい。例えば、基準は、4つ以上の衛星信号を用いて導き出された結果が受け入れ可能であることを指定するようにしてもよいのに対して、3つの衛星信号を用いて導き出された位置結果は受け入れ可能ではなく、位置が決定できないことを示す位置結果も受け入れ可能でない。
【0031】
別のシナリオにおいて、ユーザーが道に迷ってしまい、プロセッサー6がMSベース/スタンドアロンGPS方法論を使用する位置決定を行使することにより自分の位置をつきとめるかもしれない。しかしながら、信号が利用できない、または弱いGPS信号により、MSベース/スタンドアロン方法は失敗するかもしれない。移動局2は、測位を取得する確率を増加させるために、GPS測定に加えてAFLT測定、すなわち、MS支援モードをしようする方法をしようするようにプロセッサー6に指示することができる。
【0032】
あるいはまたはさらに、エラーの直接推定値が位置結果に含まれているかもしれない。例えば、位置結果は、精度表示と一緒にまたはエラー推定値プラスまたはマイナスフィーとまたはメートルと一緒に緯度と経度の観点から表してもよい。位置結果を導き出すために必要とされる最小数より多くの衛星信号を用いたGPS結果の場合に、モバイルユニットのプロセッサーまたはPDEは、利用可能な衛星信号の種々のサブセットから導き出された位置結果を比較することによりエラーの推定値を取得してもよい。
【0033】
受容性の基準は、受け入れ可能な許容誤差が±75フィートであることを含んでいてもよい。この場合、±50フィートのエラーの推定値を伴う返された結果は、±75フィートの許容範囲内なので受け入れ可能であると発見するであろう。それに対して、±75フィートのエラー推定値を伴う位置結果は受け入れ可能でないと発見されるであろう。
【0034】
適用されてもよいさらに他の基準は、移動局の従前に決定された位置と比較される。メモリ38は、以前に決定されたモバイルユニット2の位置およびそのような以前の決定の時間を表す歴史的位置データを保持することができる。最後の決定は受け入れ可能ではないとみなされるので、受け入れ基準は、位置結果が単位時間あたりのしきい値制限より大きい従前に決定された位置とは異なるように基準を含んでいてもよい。
【0035】
例えば、GPSスキームにより返される位置結果が、2秒前に決定された位置から10マイルの位置におけるグラウンドベース移動局を示すなら、そのような結果は受け入れ不可能と判断してもよい。このアプローチの変形において、一緒に近接して得られる位置決定は、一緒に平均化してもよく、移動平均を計算しまたは互いに比較して移動局の平均速度を確立してもよい。
【0036】
上述の基準のいずれかまたはすべて、および他の基準はステップ104において適用されてもよい。
【0037】
第1のスキームにより返された位置結果が受け入れ可能なら、PDE14はその結果を移動局の位置として選択する(ステップ106)。受け入れられた結果は、PDEにより、PSAP又は任意の他の適切なデスティネーションに、この方法により決定された位置として通信され、この方法は終了する。決定された位置は緯度と経度の形式で表されても良くまたはストリートアドレスまたはマップグリッドロケーションまたは任意の他の適切な形式に変換されてもよい。
【0038】
しかしながら、第1のスキームにより返された位置結果が受け入れ可能でないなら、この方法はステップ108に分岐する。このステップにおいて、PDE14は、基地局および/または移動局に対して第1の位置決定スキームとは異なる第2の位置決定スキームを実行するように命令する。
【0039】
例えば、第1の位置決定スキームがGPSを使用したなら、第2の位置決定スキームは到来時間差を使用してもよい。さまざまな基地局22、24、26、28における信号到来の時間は決定されてPDE14に通信される。PDE14はこれらの時間差に基づいて位置結果ユニットを計算する。繰り返して言うが、PDE14に報告された情報またはPDE14においてコンパイルされた情報は、信号を受信する基地局の数、種々の基地局において受信される信号の強度等のような、位置結果を導き出すために使用される信号測定についてのデータを含んでいてもよく、また、状況に応じて位置結果におけるエラーの直接推定値を含んでいてもよい。繰り返して言うが、コントローラーは位置結果を受け入れ基準と比較し、第2のスキームにより返された位置結果が受け入れ可能かどうかを決定する(ステップ110)。
【0040】
このステップにおいて適用された基準は、ステップ104に関連して上述したのと同じ基準のいくつかまたはすべてを含んでいてもよく、又はこれらの変形を含んでいてもよい。例えば、到来スキームの時間差において、受け入れ基準は、少なくとも3つの基地局においてある最小の信号強度を結う知る信号の受信のための要件を含んでいてもよい。第2の位置決定スキームにより返される位置結果が受け入れ可能なら、コントローラー40はその位置結果を、この方法により決定された位置として選択し、その位置をステップ106に関連して上述した方法と同じ方法で通信する(ステップ112)。
【0041】
第2のスキームにより返された位置結果が受け入れ可能でないなら、プロセスは、位置結果を導き出すさらなる異なるスキームを用いた位置を導き出すステップのさらなる反復を用いて、および上述したのと同じ方法で受け入れ可能な位置結果が発見されて通信されるまで(ステップ118)、またはシステムに含まれる機器を用いた可能なnの位置決定スキームのすべてが使用されるまで受容性のさらなる決定(ステップ116)を用いて、継続する。受け入れ可能な位置結果を返さずにn番目のスキームが完了するなら、コントローラー40はエラーメッセージを返し(ステップ120)し、この方法は終了する。
【0042】
変形において、方法が異なるスキームを使用する順番は、達成される結果に基づいて調節されてもよい。上述したステップのシーケンスにおいて特定のスキームが受け入れ可能な結果を与えるように発見されるなら、そのスキームは使用順序の第1番目に配置されてもよい。従って、別の位置要求がPDE14により受信され、上述したステップのシーケンスが再び開始されるなら、そのスキームは第1の位置決定ステップにおいて使用されるであろう。そのようなスキームは受け入れ可能な結果を与える可能性がある。第1のスキームとして以前に成功したスキームを使用することにより、システムは受け入れ可能なスキームを発見する前に複数のスキームを介して「捜索する」回数を最小にする。
【0043】
変形において、この方法は、エラーメッセージを返す代わりに、またはエラーメッセージを返すことに加えて再び開始してもよい(ステップ102に戻る)。さらなる変形において、受け入れ可能な位置結果を発見せずにすべてのnの方法が使用された場合には、システムは、利用可能な結果の中から最良の位置を選択してもよい。例えば、位置結果のすべてが、エラーの推定値を表すデータを伴う場合、システムは最も小さいエラーの推定値に関連する位置結果を選択してもよく、その結果を通信してもよい。
【0044】
他の実施形態に従う方法において、コントローラー40はシステムのコンポーネントを作動してすべてのNの位置決定スキームを並列に実行し、返された位置結果の中から1つの位置結果を選択する。図3はこの方法を描くフローチャートを図解する。
【0045】
nのスキームに従う位置決定は並列に実行される(ステップ202、204、206)。
【0046】
各位置結果は、上述したあらかじめ選択された受容性基準に対してテストされ(ステップ208、210、212)、受け入れ可能でない結果は破棄される。受け入れ可能な結果は比較され(ステップ214)、メリット(merit)のあらかじめ決定された基準に従って最良の結果が選択される(ステップ216)。例えば、結果がエラーの推定値を伴う場合、最も低く推定されたエラーに関連する結果が選択される。
【0047】
あるいは、コントローラーは、そのような結果に関連する条件の間の周知のまたは仮定された関係および結果の精度に基づいてエラーの推定値または性能指数を各結果に割り当ててもよい。例えば、コントローラーは、4つの基地局における到来角から導き出された結果に(低いエラー推定値のような)より好ましい性能指数を割り当ててもよいし、3つの基地局において受信された信号に基づいて到来角結果に(高い推定値エラーのような)より好ましくない性能指数を割り当ててもよい。選択された位置結果は、方法により決定された位置として通信される(ステップ220)。
【0048】
この方法の変形において、各結果の受容性を決定し、受け入れ不可能な結果を破棄するステップ(ステップ208−212)は省略され、すべての結果はエラー推定値または他の性能指数との比較ステップに渡される。
【0049】
他の実施形態に従う方法において、(図4)複数の位置結果が異なる位置決定スキームを用いて取得され(ステップ302−306)、推定値または他の性能指数が上述した方法で結果ごとに決定される(ステップ308−312)。各位置結果は、エラーの推定値(精度推定値)において具現化される信頼度の規定された基準または他の性能指数を有したランダム変数として見なされる。この信頼度の基準に従って種々の個々の結果に異なる重み付けをする結合アルゴリズムを用いて種々の結果が互いに結合され(ステップ314)結合された結果を生じる。
【0050】
1つのそのような結合アルゴリズムにおいて、信頼度のレベルに従って重み付けされた平均値はこれらの位置ランダム変数に対して計算される。例えばn(nは整数)の異なるスキームw1, w2,...wnにより取得された読み取り値が各位置結果に帰属する重み係数を表し、x1, x2,...,xnが位置結果を表すなら、重み係数は以下のように表すことができる。w1x1+w2x2+w3x3(w1+w2+w3)。
【0051】
高い精度表示を有した位置測定により大きな重みを与えるために、(逆に言えば、最も小さな信頼度を有した測定により小さな重みを与えるために)、精度表示の逆数が加重平均の計算において重み係数として使用することができる。従って、x1が±5フィーとの精度を有するなら、x2は±50フィーとの精度を有し、x3は、±10フィーとの精度を有し、重み係数w1, w2, w3はそれぞれ、0.2、0.02、0.1の値を有するであろう。x1に最大の重み量が与えられ、次にx2にその次の重み量が与えられ、次に、x3にその次の重み量が与えられる。重み係数は他の方法を用いて計算することができる。例えば、精度表示の逆数の二乗は重み係数に使用することができる。
【0052】
さらに他の実施形態において、上述した位置標定方法論は、移動局によっておよび/または移動局と協働するネットワーク/PDEにより実施することができる。
【0053】
図5は、ネットワーク/PDEと移動局との相互作用のブロック図を図解する。移動局2は位置決定モードマルチプレクサー4、プロセッサー6、メモリ8、トランシーバー(送信機/受信機)10およびディスプレイ11を含む。1つの観点において、移動局2は、プロセッサー6により指示されたネットワーク/PDE方法を用いてあらかじめ指定した許容範囲内で位置を決定しようと試みるであろう。位置決定があらかじめ指定された許容範囲を達成していないなら、マルチプレクサー4は他の位置決定方法を用いて適切な精度の測位を取得するために動的にモードを切替る。
【0054】
スイッチ4により選択された位置標定モードは、移動局に基づいて方法論を採用することができる。すなわち、ネットワーク/PDE14と通信するためにトランシーバーを用いてMSベース/スタンドアロンモード(例えば、GPS)またはMS支援モードに基づいた方法論を採用することができる。二重矢12はMS支援モード動作の場合の移動局とネットワーク/PDEとの相互作用を意味する。この発明の一実施形態において、移動局のために決定される位置に関連して、場所が移動局2のディスプレイ11上に示すことができる。あるいは、位置をネットワーク/PDE14に送ることができ、及び/又はネットワーク/PDE14において決定することができる。
【0055】
メモリ8は歴史的位置決めデータを保持することができる。プロセッサー6はマルチプレクサー4の動作を指示するようにプログラムされる。メモリ8における以前の移動局の位置読み取り値の記憶と一緒に、所定の期間内に、現在の位置読み取り値がしいきい値制限を越えて変化するな、それは、位置測定において重大なエラーを示しているかもしれない。プロセッサー6は他の方法により移動局の位置の決定を必要とする応答を提供することができる。例えば、2秒後に、移動局が10マイル移動するなら、特に移動局2が地上ベースの場合、この決定は誤っている可能性がある。あるいは、メモリ8は移動平均を計算するように、時間内に緊密に採取された位置決定が一緒に平均化することを可能にすることができる。これは、時間に対する位置の変化に関して平滑作用を提供するけれども、この方法はいくつかのエラーを導入する可能性がある。位置決定のいくつかのアプリケーションの場合、このエラーは受け入れてもよい。
【0056】
移動局位置決定は、各方法が1つ以上のスキームから構成される異なる方法を選択することにより成就することができる。例えば、GPS MS支援方法は、GPSまたはAFLTと結合されたGPSを構成することができる。ネットワークベース方法は、TDCOAまたはAOAまたは両方の組み合わせを含むことができる。一方、GPS MSベース/スタンドアロン方法は、例えばGPSのみを使用してもよい。
【0057】
いくつかの理由で特定の位置決定方法が失敗するなら移動局の位置決定を行う一般的な試みは完全に失敗する。この発明による移動局位置決定は、いくつかの理由で移動局の位置を決定することに失敗するかもしれない特定のスキームとは異なるまたは特定のスキームに加えて異なる位置決定スキームを含む方法論を可能にする。
【0058】
それにより成功した位置決定スキームの可用性は、一般的な方法に比べて、この発明を用いて増加する。さらに、この発明は、同じスキームを用いて、さもなければ失敗したであろうリソースとは異なる位置決定のためのリソースの使用を可能にする。
【0059】
この発明は、特定の実施形態を参照して記載されたけれどもこれらの実施形態は、特定の原理およびアプリケーションを単に例証することが理解されるべきである。例えば、図1−図4に関連して参照された特定の位置決定スキームは単に例証である。多くの個々の位置決定スキームのいずれかを使用することができる。例えば、複数の基地局からの信号の到来時間を使用する三辺測量を使用することができる。望ましくは、種々の位置決定スキームは、全体的または一部、信号特性の異なる物理測定、異なる信号またはその両方に依存する。また、上述した例においてPDE36またはコントローラー40により実行される機能は、全体的にまたは一部、移動局2のエレメントにより実行することができる。別の言い方をすれば、移動局のプロセッサー6は、コントローラー40の機能を実行する機能エレメントを含むことができる。また、位置決定方法は、同時にまたはシーケンシャルに複数の移動局の位置を決定するように実行することができる。ここに記載された技術は、CDMAシステムだけではなく、時分割多重アクセス(TDMA)システム、周波数分割多重アクセスシステム(FDMA)または空間分割多重アクセス(SDMA)システムのような必須的に任意のネットワークにおいて実施することができる。それゆえ、添付されたクレームにより定義されるこの発明の精神および範囲を逸脱することなく、実施形態に対して多くの変更を行ってもよく、他の構成を考案してもよいことが理解されるべきである。
【特許請求の範囲】
【請求項1】
移動局の位置を取得する方法において、
(a)位置決定の第1のスキームを用いて前記移動局の位置を決定することと、
(b)前記決定することが受け入れ可能な位置結果を生じないなら、(i)反復が受け入れ可能な位置結果を戻すまで、または(ii)すべての利用可能な位置決定スキームが使用されるまで少なくともいくつかの反復において前記第1のスキームとは異なる位置決定の少なくとも1つのさらなるスキームを用いて前記決定することを反復することと、
を備えた方法。
【請求項2】
前記移動局は、携帯電話、無線通信能力を有したパーソナルデジタルアシスタント、無線通信能力を有したポータブルコンピューター、ページャー、および他のパーソナル通信装置から構成されるグループから選択された移動通信装置である、請求項1の方法。
【請求項3】
前記位置決定スキームは、GPS、三辺測量、サーバー支援GPS、機能強化された信号強度、到来角、到来の時間差、フォワードリンク三辺測量、進歩したフォワードリンク三辺測量、フィンガープリント法、およびそれらの組み合わせから構成されるグループから選択される、請求項1の方法。
【請求項4】
前記位置決定スキームの少なくとも1つは移動局ベーススタンドアロンスキームである、請求項1の方法。
【請求項5】
前記位置決定スキームの少なくとも1つはモバイル支援ベーススキームである、請求項4の方法。
【請求項6】
前記位置決定スキームの少なくとも1つはモバイル支援ベーススキームである、請求項1の方法。
【請求項7】
前記決定の各々が受け入れ可能な位置結果を生じるかどうかを決定することをさらに備えた、請求項1の方法。
【請求項8】
各位置結果に関連する誤差の推定値を導き出すことをさらに備え、前記各決定が受け入れ可能な位置結果を生じたかどうかを決定することは、そのような位置結果に関連する誤差の推定値を所定の許容値と比較することを含む、請求項7の方法。
【請求項9】
前記所定の許容値は±50フィーとである、請求項8の方法。
【請求項10】
少なくとも1つの前記スキームは、前記移動局と複数の基地局との間で送信された信号の特性を監視することを含み、前記誤差の推定値を導き出すことは、前記監視することに含まれる基地局の数を決定することを含む、請求項8の方法。
【請求項11】
移動局の位置を決定する方法において、
複数の異なる位置決定スキームに従って前記移動局のための位置を決定し、各位置決定スキームのための誤差の推定値を決定することと、
誤差の最も小さな推定値を有する1つの前記位置決定スキームを選択し、前記選択された位置決定スキームにより提供される位置結果を前記移動局の位置として選択することと、
を備えた方法。
【請求項12】
前記移動局は、携帯電話、無線通信能力を有したパーソナルデジタルアシスタント、無線通信能力を有したポータブルコンピューター、ページャー、および他のパーソナル通信装置から構成されたグループから選択された移動通信装置である、請求項11の方法。
【請求項13】
前記スキームは、GPS三辺測量、サーバー支援GPS、機能強化された信号強度、到来角、到来の時間差、フォワードリンク三辺測量、進歩したフォワードリンク三辺測量、フィンガープリント法およびそれらの組み合わせから構成されるグループから選択される、請求項11の方法。
【請求項14】
前記スキームの少なくとも1つは移動局ベーススタンドアロンスキームである、請求項11の方法。
【請求項15】
前記スキームの少なくとも1つはモバイル支援ベーススキームである、請求項14の方法。
【請求項16】
前記スキームの少なくとも1つはモバイル支援ベーススキームである、請求項11の方法。
【請求項17】
前記各決定が受け入れ可能な位置結果を生じたかどうかを決定することをさらに備え、前記選択は、受け入れ可能な位置結果のみ間で選択することを含む、請求項11の方法。
【請求項18】
前記位置決定スキームの少なくとも1つは、前記移動局と複数の基地局との間で送信された信号の特性を監視することを含み、前記選択は前記監視することに含まれる基地局の数を決定することを含む、請求項11の方法。
【請求項19】
移動局の位置を決定する方法において、
複数の異なる位置結果を提供するように、nが整数であるnの異なるスキームに従って前記移動局のための位置を決定することと、
複数の前記位置結果を結合することにより前記移動局の位置を計算することと、
を備えた方法。
【請求項20】
前記各位置結果のための誤差の推定値を導き出すことをさらに備え、前記計算することは、少なくとも一部分前記誤差の推定値に基づいて前記複数の位置結果を結合することを含む、請求項19の方法。
【請求項21】
前記結合することは、前記誤差の推定値に基づいて重み係数を用いて前記位置結果の加重平均を計算することを含む、請求項20の方法。
【請求項22】
前記重み係数は誤差の推定値の逆数である、請求項20の方法。
【請求項23】
前記重み係数は、前記誤差の推定値の逆数の二乗である、請求項22の方法。
【請求項24】
移動局の位置を決定するためのシステムにおいて、
移動局と、
無線信号により前記移動局と通信するように適合されたネットワークと、
前記ネットワークおよび前記移動局の一方または両方と通信している位置決定エンティティであって、前記移動局、ネットワークおよび位置決定エンティティは、複数の利用可能な位置決定スキームにより前記移動局の位置を表す位置結果を導き出すように動作可能なである、位置決定エンティティと、
前記位置決定エンティティと通信しているコントローラーであって、前記コントローラーは前記位置決定エンティティ、ネットワークおよび移動局を作動させて、前記移動局の位置を表す第1のスキームに従って位置結果を導き出し、前記第1のスキームに従って前記位置結果が受け入れ可能かどうかを決定し、受け入れ可能でないなら、すべての利用可能な位置決定スキームが使用されるかまたは受け入れ可能な位置結果が取得されるまで前記第1スキームとは異なる少なくとも1つのさらなるスキームに従って位置結果を導き出すように前記位置決定エンティティ、ネットワークおよび移動局を作動させるように動作可能である、コントローラーと、
を備えたシステム。
【請求項25】
移動局の位置を決定するためのシステムにおいて、
移動局と、
無線信号により前記移動局と通信するように適合されたネットワークと、
前記ネットワークおよび前記移動局の一方または両方と通信している位置決定エンティティであって、前記移動局、ネットワーク、および位置決定エンティティは、複数の利用可能な位置決定スキームにより前記移動局の位置を表す位置結果を導き出すように動作可能である、位置決定エンティティと、
前記位置決定エンティティと通信しているコントローラーであって、前記コントローラーは、前記位置決定エンティティ、ネットワークおよび移動局を作動させ、2以上の前記スキームに従って前記移動局の位置を表す位置結果を導き出し、前記位置結果の1つを選択するように動作可能であるコントローラーと、
を備えたシステム。
【請求項26】
移動局の位置を決定するためのシステムにおいて、
移動局と、
無線信号により前記移動局と通信するように適合されたネットワークと、
前記ネットワークと前記移動局の一方または両方と通信している位置決定エンティティであって、前記移動局、ネットワークおよび位置決定エンティティは、複数の利用可能な位置決定スキームにより前記移動局の位置を表す位置結果を導き出すように動作可能である、位置決定エンティティと、
前記位置決定エンティティと通信しているコントローラーであって、前記コントローラーは、前記位置決定エンティティ、ネットワークおよび移動局を作動させて、2以上の前記スキームに従って前記移動局の位置を表す位置結果を導き出し、前記結果を結合することにより前記移動局の位置を計算するように動作可能であるコントローラーと、
を備えたシステム。
【請求項27】
前記ネットワークは、CDMA、TDMA、FDMA、SDMA、およびそれらの組み合わせから構成される無線チャネルアクセススキームのグループから選択された技術を介して前記移動局と通信するように適合される、請求項26のシステム。
【請求項28】
前記スキームは、GPS三辺測量、サーバー支援GPS、機能強化された信号強度、到来角、到来の時間差、フォワードリンク三辺測量、進歩したフォワードリンク三辺測量、フィンガープリント法、およびそれらの組み合わせから構成されるグループから選択される、請求項26のシステム。
【請求項29】
前記移動局は、携帯電話、無線通信能力を有したパーソナルデジタルアシスタント、無線通信能力を有したポータブルコンピューター、ページャー、および他のパーソナル通信装置から構成されるグループから選択された移動通信装置である、請求項26のシステム。
【請求項30】
移動局の位置を決定するための位置決定方法論を選択するための位置決定モードマルチプレクサーであって、前記位置決定モードマルチプレクサーは、移動局スタンドアロンおよび移動局−ネットワーク支援位置決定方法との間で選択するように動作可能である、位置決定モードマルチプレクサーと、
前記ネットワークを有した無線チャネルアクセスを介して通信を提供する送信機および受信機と、
前記マルチプレクサーを指示するプロセッサーと、
を備えた移動局。
【請求項31】
前記無線チャネルアクセスは、CDMA、TDMA、FDMA、SDMAおよびそれらの組み合わせから構成される無線チャネルアクセススキームのグループから選択された技術を介して提供される、請求項30の移動局。
【請求項32】
前記方法は、GPS三辺測量、サーバー支援GPS、機能強化された信号強度、到来角、到来の時間差、フォワードリンク三辺測量、進歩したフォワードリンク三辺測量、フィンガープリント法、およびそれらの組み合わせから構成されるグループから選択される、請求項30の移動局。
【請求項33】
前記移動局は、携帯電話、無線通信能力を有したパーソナルデジタルアシスタント、無線通信能力を有したポータブルコンピューター、ページャー、および他のパーソナル通信装置から構成されるグループから選択された移動通信装置である、請求項30の移動局。
【請求項1】
移動局の位置を取得する方法において、
(a)位置決定の第1のスキームを用いて前記移動局の位置を決定することと、
(b)前記決定することが受け入れ可能な位置結果を生じないなら、(i)反復が受け入れ可能な位置結果を戻すまで、または(ii)すべての利用可能な位置決定スキームが使用されるまで少なくともいくつかの反復において前記第1のスキームとは異なる位置決定の少なくとも1つのさらなるスキームを用いて前記決定することを反復することと、
を備えた方法。
【請求項2】
前記移動局は、携帯電話、無線通信能力を有したパーソナルデジタルアシスタント、無線通信能力を有したポータブルコンピューター、ページャー、および他のパーソナル通信装置から構成されるグループから選択された移動通信装置である、請求項1の方法。
【請求項3】
前記位置決定スキームは、GPS、三辺測量、サーバー支援GPS、機能強化された信号強度、到来角、到来の時間差、フォワードリンク三辺測量、進歩したフォワードリンク三辺測量、フィンガープリント法、およびそれらの組み合わせから構成されるグループから選択される、請求項1の方法。
【請求項4】
前記位置決定スキームの少なくとも1つは移動局ベーススタンドアロンスキームである、請求項1の方法。
【請求項5】
前記位置決定スキームの少なくとも1つはモバイル支援ベーススキームである、請求項4の方法。
【請求項6】
前記位置決定スキームの少なくとも1つはモバイル支援ベーススキームである、請求項1の方法。
【請求項7】
前記決定の各々が受け入れ可能な位置結果を生じるかどうかを決定することをさらに備えた、請求項1の方法。
【請求項8】
各位置結果に関連する誤差の推定値を導き出すことをさらに備え、前記各決定が受け入れ可能な位置結果を生じたかどうかを決定することは、そのような位置結果に関連する誤差の推定値を所定の許容値と比較することを含む、請求項7の方法。
【請求項9】
前記所定の許容値は±50フィーとである、請求項8の方法。
【請求項10】
少なくとも1つの前記スキームは、前記移動局と複数の基地局との間で送信された信号の特性を監視することを含み、前記誤差の推定値を導き出すことは、前記監視することに含まれる基地局の数を決定することを含む、請求項8の方法。
【請求項11】
移動局の位置を決定する方法において、
複数の異なる位置決定スキームに従って前記移動局のための位置を決定し、各位置決定スキームのための誤差の推定値を決定することと、
誤差の最も小さな推定値を有する1つの前記位置決定スキームを選択し、前記選択された位置決定スキームにより提供される位置結果を前記移動局の位置として選択することと、
を備えた方法。
【請求項12】
前記移動局は、携帯電話、無線通信能力を有したパーソナルデジタルアシスタント、無線通信能力を有したポータブルコンピューター、ページャー、および他のパーソナル通信装置から構成されたグループから選択された移動通信装置である、請求項11の方法。
【請求項13】
前記スキームは、GPS三辺測量、サーバー支援GPS、機能強化された信号強度、到来角、到来の時間差、フォワードリンク三辺測量、進歩したフォワードリンク三辺測量、フィンガープリント法およびそれらの組み合わせから構成されるグループから選択される、請求項11の方法。
【請求項14】
前記スキームの少なくとも1つは移動局ベーススタンドアロンスキームである、請求項11の方法。
【請求項15】
前記スキームの少なくとも1つはモバイル支援ベーススキームである、請求項14の方法。
【請求項16】
前記スキームの少なくとも1つはモバイル支援ベーススキームである、請求項11の方法。
【請求項17】
前記各決定が受け入れ可能な位置結果を生じたかどうかを決定することをさらに備え、前記選択は、受け入れ可能な位置結果のみ間で選択することを含む、請求項11の方法。
【請求項18】
前記位置決定スキームの少なくとも1つは、前記移動局と複数の基地局との間で送信された信号の特性を監視することを含み、前記選択は前記監視することに含まれる基地局の数を決定することを含む、請求項11の方法。
【請求項19】
移動局の位置を決定する方法において、
複数の異なる位置結果を提供するように、nが整数であるnの異なるスキームに従って前記移動局のための位置を決定することと、
複数の前記位置結果を結合することにより前記移動局の位置を計算することと、
を備えた方法。
【請求項20】
前記各位置結果のための誤差の推定値を導き出すことをさらに備え、前記計算することは、少なくとも一部分前記誤差の推定値に基づいて前記複数の位置結果を結合することを含む、請求項19の方法。
【請求項21】
前記結合することは、前記誤差の推定値に基づいて重み係数を用いて前記位置結果の加重平均を計算することを含む、請求項20の方法。
【請求項22】
前記重み係数は誤差の推定値の逆数である、請求項20の方法。
【請求項23】
前記重み係数は、前記誤差の推定値の逆数の二乗である、請求項22の方法。
【請求項24】
移動局の位置を決定するためのシステムにおいて、
移動局と、
無線信号により前記移動局と通信するように適合されたネットワークと、
前記ネットワークおよび前記移動局の一方または両方と通信している位置決定エンティティであって、前記移動局、ネットワークおよび位置決定エンティティは、複数の利用可能な位置決定スキームにより前記移動局の位置を表す位置結果を導き出すように動作可能なである、位置決定エンティティと、
前記位置決定エンティティと通信しているコントローラーであって、前記コントローラーは前記位置決定エンティティ、ネットワークおよび移動局を作動させて、前記移動局の位置を表す第1のスキームに従って位置結果を導き出し、前記第1のスキームに従って前記位置結果が受け入れ可能かどうかを決定し、受け入れ可能でないなら、すべての利用可能な位置決定スキームが使用されるかまたは受け入れ可能な位置結果が取得されるまで前記第1スキームとは異なる少なくとも1つのさらなるスキームに従って位置結果を導き出すように前記位置決定エンティティ、ネットワークおよび移動局を作動させるように動作可能である、コントローラーと、
を備えたシステム。
【請求項25】
移動局の位置を決定するためのシステムにおいて、
移動局と、
無線信号により前記移動局と通信するように適合されたネットワークと、
前記ネットワークおよび前記移動局の一方または両方と通信している位置決定エンティティであって、前記移動局、ネットワーク、および位置決定エンティティは、複数の利用可能な位置決定スキームにより前記移動局の位置を表す位置結果を導き出すように動作可能である、位置決定エンティティと、
前記位置決定エンティティと通信しているコントローラーであって、前記コントローラーは、前記位置決定エンティティ、ネットワークおよび移動局を作動させ、2以上の前記スキームに従って前記移動局の位置を表す位置結果を導き出し、前記位置結果の1つを選択するように動作可能であるコントローラーと、
を備えたシステム。
【請求項26】
移動局の位置を決定するためのシステムにおいて、
移動局と、
無線信号により前記移動局と通信するように適合されたネットワークと、
前記ネットワークと前記移動局の一方または両方と通信している位置決定エンティティであって、前記移動局、ネットワークおよび位置決定エンティティは、複数の利用可能な位置決定スキームにより前記移動局の位置を表す位置結果を導き出すように動作可能である、位置決定エンティティと、
前記位置決定エンティティと通信しているコントローラーであって、前記コントローラーは、前記位置決定エンティティ、ネットワークおよび移動局を作動させて、2以上の前記スキームに従って前記移動局の位置を表す位置結果を導き出し、前記結果を結合することにより前記移動局の位置を計算するように動作可能であるコントローラーと、
を備えたシステム。
【請求項27】
前記ネットワークは、CDMA、TDMA、FDMA、SDMA、およびそれらの組み合わせから構成される無線チャネルアクセススキームのグループから選択された技術を介して前記移動局と通信するように適合される、請求項26のシステム。
【請求項28】
前記スキームは、GPS三辺測量、サーバー支援GPS、機能強化された信号強度、到来角、到来の時間差、フォワードリンク三辺測量、進歩したフォワードリンク三辺測量、フィンガープリント法、およびそれらの組み合わせから構成されるグループから選択される、請求項26のシステム。
【請求項29】
前記移動局は、携帯電話、無線通信能力を有したパーソナルデジタルアシスタント、無線通信能力を有したポータブルコンピューター、ページャー、および他のパーソナル通信装置から構成されるグループから選択された移動通信装置である、請求項26のシステム。
【請求項30】
移動局の位置を決定するための位置決定方法論を選択するための位置決定モードマルチプレクサーであって、前記位置決定モードマルチプレクサーは、移動局スタンドアロンおよび移動局−ネットワーク支援位置決定方法との間で選択するように動作可能である、位置決定モードマルチプレクサーと、
前記ネットワークを有した無線チャネルアクセスを介して通信を提供する送信機および受信機と、
前記マルチプレクサーを指示するプロセッサーと、
を備えた移動局。
【請求項31】
前記無線チャネルアクセスは、CDMA、TDMA、FDMA、SDMAおよびそれらの組み合わせから構成される無線チャネルアクセススキームのグループから選択された技術を介して提供される、請求項30の移動局。
【請求項32】
前記方法は、GPS三辺測量、サーバー支援GPS、機能強化された信号強度、到来角、到来の時間差、フォワードリンク三辺測量、進歩したフォワードリンク三辺測量、フィンガープリント法、およびそれらの組み合わせから構成されるグループから選択される、請求項30の移動局。
【請求項33】
前記移動局は、携帯電話、無線通信能力を有したパーソナルデジタルアシスタント、無線通信能力を有したポータブルコンピューター、ページャー、および他のパーソナル通信装置から構成されるグループから選択された移動通信装置である、請求項30の移動局。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−36985(P2013−36985A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−153565(P2012−153565)
【出願日】平成24年7月9日(2012.7.9)
【分割の表示】特願2007−531332(P2007−531332)の分割
【原出願日】平成17年9月7日(2005.9.7)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2012−153565(P2012−153565)
【出願日】平成24年7月9日(2012.7.9)
【分割の表示】特願2007−531332(P2007−531332)の分割
【原出願日】平成17年9月7日(2005.9.7)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
[ Back to top ]