
位置標定方法、及び位置標定システム
【課題】簡素な方法により移動体の位置の標定精度を向上させる。
【解決手段】基地局20に第1のアンテナ対と第2のアンテナ対とを、第1のアンテナ対の各アンテナ251a,251bによって受信される位置標定信号900の経路差と第2のアンテナ対の各アンテナ251c,251dによって受信される位置標定信号900の経路差とが一致するように設け、第1のアンテナ対によって受信される位置標定信号900の位相差Δθ1を測定し、第2のアンテナ対によって受信される位置標定信号900の位相差Δθ2を測定し、測定した位相差Δθ1と位相差Δθ2とに基づき、移動端末30から受信した位置標定信号が直接波であるか否かを判定する。また位相差Δθ1と位相差Δθ2とが一致する場合に、位相差Δθ1もしくは位相差Δθ2から求まる移動端末30の位置を、移動端末30の現在位置として取得する。
【解決手段】基地局20に第1のアンテナ対と第2のアンテナ対とを、第1のアンテナ対の各アンテナ251a,251bによって受信される位置標定信号900の経路差と第2のアンテナ対の各アンテナ251c,251dによって受信される位置標定信号900の経路差とが一致するように設け、第1のアンテナ対によって受信される位置標定信号900の位相差Δθ1を測定し、第2のアンテナ対によって受信される位置標定信号900の位相差Δθ2を測定し、測定した位相差Δθ1と位相差Δθ2とに基づき、移動端末30から受信した位置標定信号が直接波であるか否かを判定する。また位相差Δθ1と位相差Δθ2とが一致する場合に、位相差Δθ1もしくは位相差Δθ2から求まる移動端末30の位置を、移動端末30の現在位置として取得する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、位置標定方法、及び位置標定システムに関し、とくに移動体の位置の標定精度を向上させるための技術に関する。
【背景技術】
【0002】
特許文献1には、位置標定信号の受信信号強度履歴及び加速度センサ等の検知値から求めた移動履歴を記録しておき、受信した位置標定信号の受信信号強度から第1自由空間損失を求め、受信信号強度履歴から位置標定信号の受信信号強度が最大となった位置である起点位置を求め、起点位置と移動距離/方向履歴とに基づき、起点位置から現在位置までの距離を求め、求めた距離から位置標定信号の第2自由空間損失を求め、第1自由空間損失と第2自由空間損失とを比較することにより受信した位置標定信号が直接波であるか否かを判定し、直接波でないと判定した場合に受信した位置標定信号による位置標定を行わないようにすることが記載されている。
【0003】
非特許文献1には、基地局に設置した複数のアンテナから歩行者が携帯する携帯端末に無線信号を送信し、各アンテナから送信されてくる無線信号の位相差によって携帯端末とアンテナとの相対位置を求め、求めた相対位置(方向、距離)と基地局の絶対位置とから歩行者の現在位置を取得するようにした位置標定システムが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第4364917号公報
【非特許文献1】武内 保憲,河野 公則,河野 実則、” 2.4GHz帯を用いた場所検知システムの開発”、平成17年度 電気・情報関連学会中国支部第56回連合大会
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載されているように、直接波以外のマルチパスや反射波などの無線信号によって位置標定が行われてしまうと、標定精度が著しく低下してしまうことがある。また基地局や携帯端末が障害物の多い屋内等で用いられる場合には、位置標定信号が壁や金属構造物等によって反射されて直接波以外の無線信号が発生する可能性が高くなる。
【0006】
本発明はこのような課題に鑑みてなされたもので、移動体の位置の標定精度を向上させることが可能な位置標定方法、及び位置標定システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するための本発明の一つでは、移動体に設けられる移動端末から、当該移動端末の位置を標定するための無線信号である位置標定信号を送信し、所定の場所に設けた基地局に、第1のアンテナ対と第2のアンテナ対とを、前記第1のアンテナ対の各アンテナによって受信される前記位置標定信号の経路差と前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の経路差とが一致するように設け、前記基地局が、前記第1のアンテナ対の各アンテナ又は前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθに基づき前記移動端末が存在する方向を求め、求めた前記方向に基づき前記移動端末の位置を求める、移動体の位置を標定する方法であって、前記基地局が、前記第1のアンテナ対により前記移動端末から送られてくる前記位置標定信号を受信し、前記第1のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθ1を測定し、前記第2のアンテナ対により前記移動端末から送られてくる前記位置標定信号を受信し、前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθ2を測定し、測定した前記位相差Δθ1と前記位相差Δθ2とに基づき、前記移動端末から受信した位置標定信号が直接波であるか否かを判定する。
【0008】
本発明によれば、第1のアンテナ対の各アンテナによって受信される位置標定信号の位相差Δθ1と、第2のアンテナ対の各アンテナによって受信される位置標定信号の位相差Δθ2とに基づき、移動端末から送られてくる位置標定信号が直接波であるか否かを容易に判定することができる。
【0009】
本発明の他の一つは、上記位置標定方法であって、前記基地局は、前記移動端末の位置を、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果に対して符号が反転する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差を相殺すべく、前記位相差Δθ1と前記位相差Δθ2との差を取ることにより求め、前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定は、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果と符号が一致する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、これにより測定された前記位相差Δθ1と前記位相差Δθ2との差を取ることにより行う。
【0010】
また本発明の他の一つでは、前記基地局は、前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定を、前記差が0であるか否か、あるいは少なくとも予め設定された基準値以下であるか否かに基づき行う。
【0011】
位相差Δθ2の測定結果が位相差Δθ1の測定結果と符号が一致する測定基準を用いて位相差Δθ1及び位相差Δθ2を測定し、測定された位相差Δθ1と位相差Δθ2との差を取ることにより、位相差Δθ1及び位相差Δθ2の夫々に含まれている誤差が相殺され、移動端末から受信した位置標定信号が直接波でない場合は間接波の影響による成分のみが残る。このため、本発明によれば、移動端末から受信した位置標定信号が直接波であるか否かを上記差に基づき確実に判定することができる。
【0012】
また本発明によれば、移動端末から受信した位置標定信号が直接波であるか否かの判定を、位相差Δθ1の測定誤差と位相差Δθ2の測定誤差とを相殺すべく設けられた第1のアンテナ対と第2のアンテナ対を用いて行うことができる。このため、位置標定を行うための基本的な装置構成に対して特別な構成を設けることなく、直接波であるか否かを判定する仕組みを容易に実現することができる。
【0013】
本発明の他の一つは、上記位置標定方法であって、前記基地局は、前記移動端末の位置を、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果に対して符号が反転する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差を相殺すべく、前記位相差Δθ1と前記位相差Δθ2との差を取ることにより求め、前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定を、測定した前記位相差Δθ1と前記位相差Δθ2との和を取ることにより行う。
【0014】
また本発明の他の一つでは、前記基地局は、前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定を、前記和と測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差の和とを比較することにより行う。
【0015】
位相差Δθ2の測定結果が位相差Δθ1の測定結果と符号が反転する測定基準を用いて位相差Δθ1及び位相差Δθ2を測定し、測定した位相差Δθ1と位相差Δθ2との和を取ることにより、位相差Δθ1及び位相差Δθ2の夫々に含まれている誤差と間接波の影響による成分との総和を抽出することができる。ここで移動端末から受信した位置標定信号が直接波である場合は、上記総和のうち間接波の影響による成分は0あるいは少なくとも予め設定された基準値以下となり、測定した位相差Δθ1と位相差Δθ2との和は夫々に含まれている誤差の和と一致することとなる。このため、測定した位相差Δθ1と位相差Δθ2との和が夫々に含まれている誤差の和と一致するか否かを調べることにより、移動端末から受信した位置標定信号が直接波であるか否かを判定することができる。
【0016】
また本発明によれば、移動端末から受信した位置標定信号が直接波であるか否かの判定を移動端末の位置を求めるために測定した位相差Δθ1及び位相差Δθ2(位相差Δθ1の測定結果に対して符号が反転する測定基準を用いて測定されたΔθ2)を利用して行うことができるので、位置標定と直接波か否かの判定とを一度の測定で済ますことができ、位置標定と直接波か否かの判定にかかる基地局及び移動端末の負荷を低減することができる。
【0017】
本発明の他の一つは、上記位置標定方法であって、前記基地局は、前記判定により前記位置標定信号が直接波であると判定した場合に、前記位相差Δθ1又は前記位相差Δθ2から求まる位置を前記移動端末の現在位置として取得することとする。
【0018】
本発明によれば、基地局は、移動端末から送られてくる位置標定信号が直接波であることを確認した上で移動端末の位置標定を行うので、直接波として受信した位置標定信号に基づき移動端末の正確な位置を標定することができる。
【0019】
本発明の他の一つは、上記位置標定方法であって、第1のアンテナ対及び第2のアンテナ対は、第1のアンテナ対の各アンテナ及び第2のアンテナ対の各アンテナが等間隔を開けて平面上に正方形状に配置されていることとする。
【0020】
第1のアンテナ対の各アンテナ及び第2のアンテナ対の各アンテナをこのような配置とすることで、第1のアンテナ対の各アンテナによって受信される位置標定信号の経路差と第2のアンテナ対の各アンテナによって受信される位置標定信号の経路差とを一致させることができる。
【0021】
その他、本願が開示する課題、及びその解決方法は、発明を実施するための形態の欄、及び図面により明らかにされる。
【発明の効果】
【0022】
本発明によれば、位置標定システムによる移動体の位置の標定精度を向上させることができる。
【図面の簡単な説明】
【0023】
【図1】第1実施形態の位置標定システム1の概略的な構成を示す図である。
【図2】サーバ装置10のハードウエア構成を説明する図である。
【図3】サーバ装置10の機能を説明する図である。
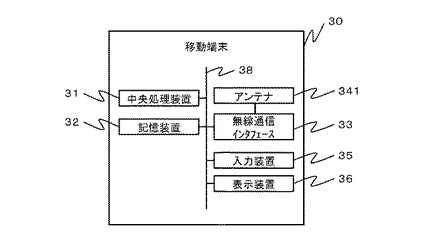
【図4】移動端末30のハードウエア構成を説明する図である。
【図5】移動端末30の主な機能を説明する図である。
【図6】基地局20のハードウエア構成を説明する図である。
【図7】基地局20の主な機能を説明する図である。
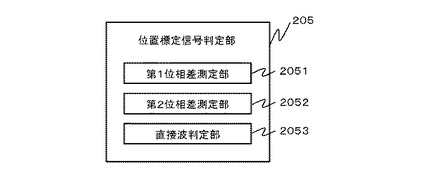
【図8】位置標定信号判定部205の機能の詳細を説明する図である。
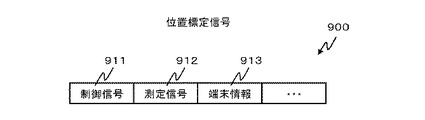
【図9】位置標定信号900のデータフォーマットの一例を示す図である。
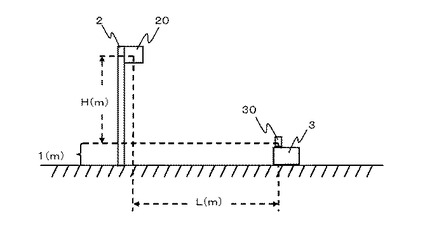
【図10】基地局20の設置現場周辺の様子の一例を示す図である。
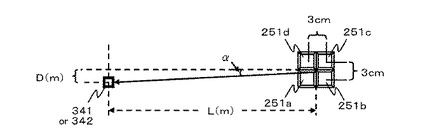
【図11】アンテナ群25を構成している各アンテナ251と移動端末30の位置関係を説明する図である。
【図12】基地局20と移動端末30の位置関係を説明する図である。
【図13】位置標定処理S1300を説明するフローチャートである。
【図14】位置標定処理S1400を説明するフローチャートである。
【図15】移動端末30のアンテナ341の一構成例として示すアンテナ構造60の正面図(平面図)である。
【図16】移動端末30のアンテナ341の一構成例として示すアンテナ構造60の側面図である。
【発明を実施するための形態】
【0024】
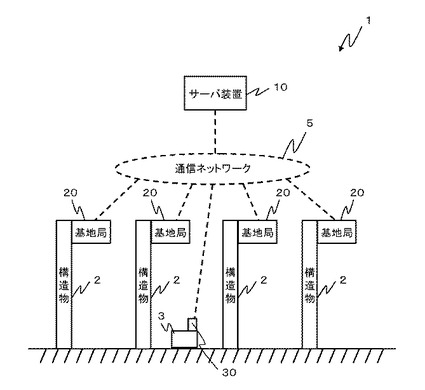
図1に実施形態として説明する位置標定システム1の概略的な構成を示している。位置標定システム1は、例えば、移動体3(車両や歩行者等)の現在位置を監視するシステム、移動体3の安全確保に関するシステム、移動体3に対する道案内や目的地までの誘導を行うシステム、移動体3に対して現在地周辺の情報等を提供するシステム、地下街やビル街等における移動体3(人)の避難誘導システム、倉庫や工場等における移動体3(商品や搬送車両等)の流れを管理するシステム、工場等における移動体3(ロボット、搬送車両等)の誘導システムなどに適用される。
【0025】
位置標定システム1は、データセンタなどに設けられるサーバ装置10、位置標定システム1が適用される地域の各所に設けられる複数の基地局20、及び移動体3に搭載もしくは携帯される移動端末30などを含んで構成されている。基地局20は、構造物2(屋内であれば建物の壁や柱等、屋外であれば電柱等)の所定の高さ位置に設けられる。基地局20及び移動端末30は、有線もしくは無線による通信ネットワーク5(専用線、公衆回線、インターネット等)を介してサーバ装置10と通信可能に接続している。
【0026】
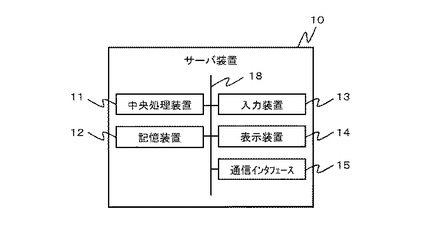
図2にサーバ装置10のハードウエア構成を示している。同図に示すように、サーバ装置10は、CPUやMPUなどを用いて構成される中央処理装置11、半導体メモリ(RAM、ROM、NVRAM等)やハードディスク装置などで構成される記憶装置12、キーボードやマウスなどの入力装置13、液晶ディスプレイなどの表示装置14、サーバ装置10を通信ネットワーク5に接続するための通信インタフェース15などを備える。各構成要素はバス18を介して通信可能に接続されている。表示装置14には、例えば、移動体3(移動端末30)の現在位置や移動方向などを示す情報がリアルタイムに表示される。
【0027】
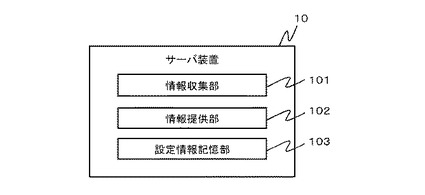
図3にサーバ装置10の機能を示している。同図に示すように、サーバ装置10は、情報収集部101、情報提供部102、及び設定情報記憶部103を備える。これらの機能は、サーバ装置10が備えるハードウエアにより、もしくは、サーバ装置10の中央処理装置11が記憶装置12に格納されているプログラムを読み出して実行することにより実現される。
【0028】
情報収集部101は、基地局20もしくは移動端末30から、移動端末30の現在位置等の情報を随時収集する。情報提供部102は、例えば、移動端末30もしくは基地局20に対し、道案内情報、目的地までの誘導情報、現在位置周辺の地理情報、移動体3の現在位置や移動方向等の監視情報、移動体3の安全確保に関する情報などの各種の情報を随時提供する。設定情報記憶部103は、例えば、基地局20の設置位置を示す情報(緯度、経度、設置高さ等)などを設定情報として記憶する。
【0029】
図4に移動端末30のハードウエア構成を示している。同図に示すように、移動端末30は、CPUやMPUなどを用いて構成される中央処理装置31、半導体メモリ(RAM、ROM、NVRAM等)やハードディスク装置などで構成される記憶装置32、後述する位置標定信号の送信や他の装置との間での無線通信を行う無線通信インタフェース33、無線通信インタフェース33によって行われる無線通信に用いられるアンテナ341、タッチパネルや操作ボタンなどの入力装置35、及び液晶ディスプレイや有機ELディスプレイなどの表示装置36を備える。各構成要素はバス38を介して通信可能に接続されている。
【0030】
アンテナ341としては、例えば、指向性アンテナや円偏波指向性アンテナを用いる。とくに移動端末30を壁等の障害物が存在する屋内等で用いる場合には、アンテナ341として円偏波指向性アンテナを用いることが好ましい。円偏波の反射波(又は定在波)の偏波面は、壁等の障害物で反射した際に反転するが、円偏波指向性アンテナを用いることで反射波や定在波を効果的に減衰させることができる。
【0031】
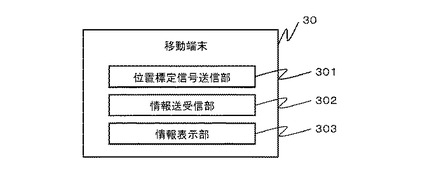
図5に移動端末30の主な機能を示している。同図に示すように、移動端末30は、位置標定信号送信部301、情報送受信部302、及び情報表示部303を備える。これらの機能は、移動端末30が備えるハードウエアにより、もしくは、移動端末30の中央処理装置31が記憶装置32に格納されているプログラムを読み出して実行することにより実現される。
【0032】
上記機能のうち位置標定信号送信部301は、移動端末30の現在位置の標定に用いられる無線信号(以下、位置標定信号と称する)を無線通信インタフェース33によって送信する。
【0033】
情報送受信部302は、無線通信インタフェース33による無線通信や通信ネットワーク5による有線通信によりサーバ装置10もしくは基地局20と通信し、移動体3に提示するための情報の受信(ダウンロード)や、サーバ装置10もしくは基地局20で用いられる各種情報の送信(アップロード)などを行う。情報表示部303は、移動体3などに提示する情報を表示装置36に出力する。
【0034】
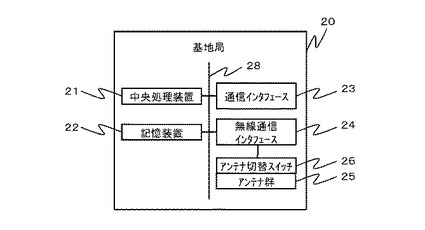
図6に基地局20のハードウエア構成を示している。同図に示すように、基地局20は、CPUやMPUなどを用いて構成される中央処理装置21、半導体メモリ(RAM、ROM、NVRAM等)やハードディスク装置などで構成される記憶装置22、基地局20を通信ネットワーク5に接続するための通信インタフェース23、無線通信を行う無線通信インタフェース24、アンテナ群25、及びアンテナ切替スイッチ26などを備える。各構成要素は、バス28を介して通信可能に接続されている。
【0035】
中央処理装置21は、記憶装置22に格納されているプログラムを読み出して実行することにより基地局20が備える各種の機能を実現する。無線通信インタフェース24は、移動端末30から送信された位置標定信号を受信する。
【0036】
アンテナ群25は、少なくとも4つのアンテナ251(指向性アンテナ、円偏波指向性アンテナ等)を含む。アンテナ切替スイッチ26は、アンテナ群25を構成しているいずれかのアンテナ251を選択し、選択したアンテナ251を無線通信インタフェース24に接続する。尚、基地局20を壁等の障害物が存在する屋内等で用いる場合は、アンテナ群25を構成するアンテナ251として円偏波指向性アンテナを用いることが好ましい。円偏波の反射波(又は定在波)の偏波面は壁等での反射時に反転するため、円偏波指向性アンテナを用いることにより反射波(又は定在波)を効果的に減衰させることができる。
【0037】
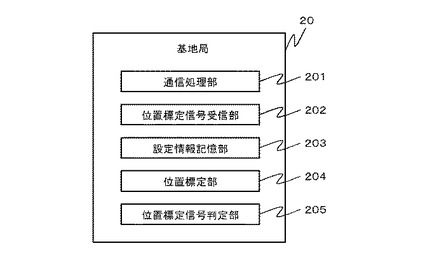
図7に基地局20の主な機能を示している。同図に示すように、基地局20は、通信処理部201、位置標定信号受信部202、設定情報記憶部203、位置標定部204、及び位置標定信号判定部205を備える。尚、これらの機能は、基地局20が備えるハードウエアによって、もしくは、基地局20の中央処理装置21が記憶装置22に格納されているプログラムを読み出して実行することにより実現される。
【0038】
通信処理部201は、無線通信インタフェース24や通信インタフェース23によって移動端末30やサーバ装置10との間でデータの送信又は受信を行う。
【0039】
位置標定信号受信部202は、無線通信インタフェース24及びアンテナ切替スイッチ26を制御して移動端末30から送信される位置標定信号を受信する。
【0040】
設定情報記憶部203は、前述した設定情報(例えば、当該基地局20の現在位置を示す情報(緯度、経度、設置高さ等))を記憶する。
【0041】
位置標定部204は、位置標定信号受信部202が受信した位置標定信号に基づき移動端末30の現在位置を標定する。位置標定部204によって行われる位置標定の仕組みについては後述する。尚、位置標定部204によって標定された移動端末30の現在位置は、通信処理部201によってサーバ装置10や移動端末30に随時送信される。
【0042】
位置標定信号判定部205は、移動端末30から送信された位置標定信号が直接波であるか否かを判定する。
【0043】
図8に位置標定信号判定部205の詳細を示している。同図に示すように、位置標定信号判定部205は、第1位相差測定部2051、第2位相差測定部2052、及び直接波判定部2053を備える。
【0044】
第1位相差測定部2051は、基地局20の4つのアンテナ251のうち第1アンテナ251及び第2アンテナ251(以下、第1アンテナ251及び第2アンテナ251の組を第1のアンテナ対と称する。)により移動端末30から送られてくる位置標定信号を受信し、第1アンテナ251及び第2アンテナ251の夫々が受信した位置標定信号の位相差Δθ1を測定する。
【0045】
第2位相差測定部2052は、基地局20の4つのアンテナ251のうち第3アンテナ251及び第4アンテナ251(以下、第3アンテナ251及び第4アンテナ251の組を第2のアンテナ対と称する。)により移動端末30から送られてくる位置標定信号を受信し、第3アンテナ251及び第4アンテナ251の夫々が受信した位置標定信号の位相差Δθ2を測定する。
【0046】
尚、第1のアンテナ対と第2のアンテナ対は、第1のアンテナ対の各アンテナ251によって受信される位置標定信号の経路差と第2のアンテナ対の各アンテナ251によって受信される位置標定信号の経路差とが一致するように位置決めされて設けられる。
【0047】
直接波判定部2053は、第1位相差測定部2051によって取得される位相差Δθ1と、第2位相差測定部2052によって取得される位相差Δθ2とを比較することにより、移動端末30から送られてくる位置標定信号が直接波であるか否か(マルチパス波や反射波等でないか)を判定する。
【0048】
<位置標定の仕組み>
次に位置標定の仕組みについて説明する。移動端末30の位置標定信号送信部301は、自身に備えられているアンテナ341から位置標定信号を送信する。一方、基地局20の無線通信インタフェース23は、アンテナ群25を構成している複数のアンテナ251を周期的に切り換えながら、スペクトル拡散された無線信号からなる位置標定信号を受信する。
【0049】
図9は移動端末30から送信される位置標定信号のデータフォーマットの一例である。同図に示すように、位置標定信号900には、制御信号911、測定信号912、及び端末情報913などの信号及び情報が含まれている。
【0050】
このうち制御信号911には、変調波や各種の制御信号が含まれている。測定信号912には、数m秒程度の無変調波(例えば、基地局20に対する移動端末30の存在する方向や基地局20に対する移動端末30までの相対距離の検出に用いる信号(例えば、2048チップの拡散符号))が含まれている。端末情報913には、移動端末30を識別する情報(以下、移動端末IDと称する。)が含まれている。
【0051】
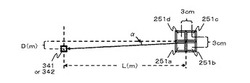
図10は基地局20と移動端末30の位置関係を例示したものである。同図に示すように、移動端末30が地上高1(m)の位置に存在し、基地局20が地上高H(m)の位置に固定されている。基地局20の直下から移動端末30までの直線距離はL(m)である。
【0052】
図11に基地局20のアンテナ群25を構成している複数のアンテナ251と移動端末30との関係を示している。同図に示すように、アンテナ群25は、位置標定信号900の1波長(12.5cm)以下の間隔をあけて平面的に略正方形状に等間隔で隣接配置された4つの円偏波指向性アンテナ(以下、アンテナ251a〜251dと称する。)を含んで構成されている。尚、各アンテナ251a〜251dは、例えば、いずれも指向方向を斜め下方向に向けて設置されている。
【0053】
尚、本実施形態では、前述した第1アンテナ251はアンテナ251aであり、第2アンテナ251はアンテナ251bであり、第3アンテナ251はアンテナ251cであり、第4アンテナ251はアンテナ251dであるものとする。
【0054】
同図において、アンテナ群25の高さ位置における水平方向とアンテナ群25に対する移動端末30の方向とのなす角をαとすれば、例えば、
α=arcTan(D(m)/L(m))=arcSin(ΔL(cm)/3(cm))
の関係となる。尚、ΔL(cm)は、アンテナ群25を構成しているアンテナ251のうち、特定の2つのアンテナ251と移動端末30との間の伝搬路長の差(以下、経路差とも称する。)である。
【0055】
ここでアンテナ群25を構成している特定の2つのアンテナ251で受信される位置標定信号900の位相差をΔθとすると、
ΔL(cm)=Δθ/(2π/λ(cm))
の関係がある。また位置標定信号900として、例えば、2.4GHz帯の電波を用いた場合はλ≒12(cm)であるので、
α=arcSin(Δθ/π)
の関係がある。また測定可能範囲(−π/2<Δθ<π/2)内では、α=Δθ(ラジアン)となるので、上式から基地局20が存在する方向を特定することができる。
【0056】
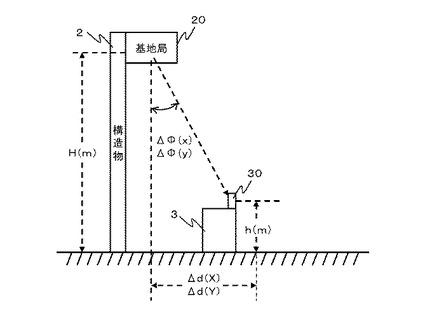
図12に基地局20の設置現場における、基地局20と移動端末30の位置関係を示している。同図に示すように、基地局20のアンテナ群25の地上高をH(m)、移動端末30の地上高をh(m)、基地局20の直下の地表面の位置を原点として直交座標軸(X軸、Y軸)を設定した場合における、基地局20から移動端末30の方向とX軸とがなす角をΔΦ(x)、基地局20から移動端末30の方向とY軸とがなす角をΔΦ(y)とすれば、原点に対する移動端末30の位置は次式から求めることができる。
Δd(x)=(H−h)×Tan(ΔΦ(x))
Δd(y)=(H−h)×Tan(ΔΦ(y))
そして原点の位置を(X1,Y1)とすれば、移動端末30の現在位置(Xx,Yy)は次式から求めることができる。
Xx=X1+Δd(x)
Yy=Y1+Δd(y)
【0057】
以上に説明した位置標定の方法については、例えば、特開2004−184078号公報、特開2005−351877号公報、特開2005−351878号公報、及び特開2006−23261号公報等にも詳述されている。
【0058】
<位置標定精度の向上>
ところで、以上のようにして行われる位置標定に際しては、基地局20と移動端末30の水晶発振器に生じる周波数偏差を要因とする誤差が問題となる。例えば、水晶発振器の周波数安定度が±0.5ppmであれば基地局20と移動端末30との間で最大1ppmの周波数偏差(2400Hz)が生じ、アンテナ切替スイッチ26の切替周期が32μsであれば2400Hz×32μs×360°=27.65°の位相差(誤差)が生じることになる。そこで本実施形態の位置標定システム1では、この測定誤差を次のようにして相殺するようにしている。
【0059】
まず第1のアンテナ対の各アンテナ(第1アンテナ251a及び第2アンテナ251b)が受信する位置標定信号900の位相差Δθ1(第1アンテナ251aを基準として第2アンテナ251bの位相を測定した結果)は、移動端末30から第1アンテナ251aまでの位置標定信号900の伝搬経路と、移動端末30から第2アンテナ251bまでの位置標定信号900の伝搬経路との差(経路差)によって生じる位相差をΔθt1とし、測定誤差をF1とすれば、次式で表すことができる。
Δθ1=Δθt1+F1 ・・・式1
【0060】
一方、第2のアンテナ対の各アンテナ(第3アンテナ251c及び第4アンテナ251d)が受信する位置標定信号900の位相差Δθ2(第3アンテナ251cを基準として第4アンテナ251dの位相を測定した結果)は、移動端末30から第3アンテナ251cまでの位置標定信号900の伝搬経路と、移動端末30から第4アンテナ251dまでの位置標定信号900の伝搬経路との差(経路差)によって生じる位相差をΔθt2とし、測定誤差をF2とすれば、次式で表すことができる。
Δθ2=−Δθt2+F2 ・・・式2
【0061】
次に式1の両辺から式2の両辺を夫々引くと次のようになる。
Δθ1−Δθ2=(Δθt1−(−Δθt2))+(F1−F2) ・・・式3
【0062】
ここで前述したように、第1のアンテナ対と第2のアンテナ対は、第1のアンテナ対の各アンテナ251a,251bによって受信される位置標定信号900の経路差と第2のアンテナ対の各アンテナ251c,251dによって受信される位置標定信号900の経路差とが一致するように設けられている。そこでこの値をθtとすれば、右辺の(Δθt1−(−Δθt2))の値は2θtとなる。また誤差F1,F2は、第1のアンテナ対の測定時と第2のアンテナ対の測定時で通常はほぼ同じであるので、右辺の(F1−F2)の値は限りなく0に近くなる。そこでこれらの値を式3に代入して式を変形すれば次のようになる。
θt=(Δθ1−Δθ2)/2 ・・・式4
【0063】
このように第1のアンテナ対と第2のアンテナ対の夫々によって位相差を測定することにより夫々の測定誤差F1,F2を相殺することができ、経路差による位相差θtを高精度で取得することができる。このため、位置標定の精度を高めることができる。尚、位相を測定する側にAGC(Automatic Gain Controller)等を設けて周波数偏差を減少させるようにすれば、式3の右辺の(F1−F2)の値をさらに0に近づけることができ、位置標定の精度をさらに高めることができる。
【0064】
=直接波か否かの判定原理=
次に移動端末30から送られてくる位置標定信号900が直接波であるか否かを判定する2つの原理(以下、判定原理(その1)、判定原理(その2)と称する)の夫々について説明する。
【0065】
<判定原理(その1)>
判定原理(その1)では、基地局20は、第1のアンテナ対の各アンテナによって受信された位置標定信号900の位相差Δθ1を測定(第1アンテナ251aを基準として第2アンテナ251bの位相を測定)し、また第2のアンテナ対の各アンテナによって受信された位置標定信号900の位相差Δθ2を測定(第4アンテナ251dを基準として第3アンテナ251cの位相を測定)し、測定した位相差Δθ1と位相差Δθ2とに基づき、移動端末30から送られてくる位置標定信号900が直接波であるか否かの判定を行う。
【0066】
ここで第1のアンテナ対の各アンテナ(第1アンテナ251a及び第2アンテナ251b)が受信する位置標定信号900の位相差Δθ1(第1アンテナ251aを基準として第2アンテナ251bの位相を測定した結果)は、移動端末30から第1アンテナ251aまでの位置標定信号900の伝搬経路と、移動端末30から第2アンテナ251bまでの位置標定信号900の伝搬経路との差(経路差)によって生じる位相差をΔθt1とし、測定誤差をF1、マルチパスや反射波の影響分をM1とすれば、次式で表すことができる。
Δθ1=Δθt1+F1+M1 ・・・式5
【0067】
また第2のアンテナ対の各アンテナ(第3アンテナ251c及び第4アンテナ251d)が受信する位置標定信号900の位相差Δθ2(第4アンテナ251dを基準として第3アンテナ251cの位相を測定した結果)は、移動端末30から第3アンテナ251cまでの位置標定信号900の伝搬経路と、移動端末30から第4アンテナ251dまでの位置標定信号900の伝搬経路との差(経路差)によって生じる位相差をΔθt2(位相の測定に際して基準を逆にしているため、前述した位置標定の場合(式2)とΔθt2の符号が反転している。)とし、測定誤差をF2、マルチパスや反射波の影響分をM2とすれば、次式で表すことができる。
Δθ2=Δθt2+F2+M2 ・・・式6
【0068】
次に式5の両辺と式6の両辺との差を取れば次のようになる。
Δθ1−Δθ2=(Δθt1−Δθt2)+(F1−F2)+(M1−M2)
・・・式7
【0069】
ここで前述したように、第1のアンテナ対と第2のアンテナ対は、第1のアンテナ対の各アンテナ251によって受信される位置標定信号900の経路差と第2のアンテナ対の各アンテナ251によって受信される位置標定信号900の経路差とが一致するように設けられているので、式7の右辺の(Δθt1−Δθt2)の値は限りなく0に近くなる。また前述したように誤差F1,F2は、第1のアンテナ対の測定時と第2のアンテナ対の測定時で通常はほぼ同じであるので、式7の右辺の(F1−F2)の値は限りなく0に近くなる。そこでこれらの値を代入すれば式7は次のようになる。
Δθ1−Δθ2=M1−M2 ・・・式8
【0070】
ここで第1のアンテナ対の各アンテナと第2のアンテナ対の各アンテナは、図11に示すように物理的な配置位置が異なっているので、各アンテナに対するマルチパスや反射波による影響は夫々異なり、位置標定信号900がマルチパスや反射波であった場合にはM1≠M2となる。逆に位置標定信号900が直接波であった場合はM1=M2となる。このため、位相差Δθ1と位相差Δθ2とが一致するか否か(両者の差が0か否か、あるいは少なくとも予め設定された基準値以下であるか否か)を調べることで移動端末30から送られてくる位置標定信号が直接波であるか否かを判定することができる。
【0071】
尚、以上に説明した仕組み(判定原理(その1))は、前述したΔΦ(x),ΔΦ(y)のいずれを求める場合にも適用することができる。即ちΔΦ(x),ΔΦ(y)の夫々を求める場合は、夫々個別にマルチパスや反射波の有無を判定することができる。
【0072】
以上に説明したように、判定原理(その1)によれば、移動端末30から受信した位置標定信号900が直接波であるか否かを上記差に基づき確実に判定することができる。
【0073】
<判定原理(その2)>
判定原理(その2)では、基地局20は、第1のアンテナ対の各アンテナによって受信された位置標定信号900の位相差Δθ1を測定(第1アンテナ251aを基準として第2アンテナ251bの位相を測定)し、また第2のアンテナ対の各アンテナによって受信された位置標定信号900の位相差Δθ2を測定(第3アンテナ251cを基準として第4アンテナ251dの位相を測定)し、測定した位相差Δθ1と位相差Δθ2とに基づき移動端末30から送られてくる位置標定信号900が直接波であるか否かの判定を行う。
【0074】
ここで第1のアンテナ対の各アンテナ(第1アンテナ251a及び第2アンテナ251b)が受信する位置標定信号900の位相差Δθ1(第1アンテナ251aを基準として第2アンテナ251bの位相を測定した結果)は、移動端末30から第1アンテナ251aまでの位置標定信号900の伝搬経路と、移動端末30から第2アンテナ251bまでの位置標定信号900の伝搬経路との差(経路差)によって生じる位相差をΔθt1とし、測定誤差をF1、マルチパスや反射波の影響分をM1とすれば、次式で表すことができる。
Δθ1=Δθt1+F1+M1 ・・・式9
【0075】
また第2のアンテナ対の各アンテナ(第3アンテナ251c及び第4アンテナ251d)が受信する位置標定信号900の位相差Δθ2(第3アンテナ251cを基準として第4アンテナ251dの位相を測定した結果)は、移動端末30から第3アンテナ251cまでの位置標定信号900の伝搬経路と、移動端末30から第4アンテナ251dまでの位置標定信号900の伝搬経路との差(経路差)によって生じる位相差をΔθt2(位相の測定に際して基準を同一にしているため、前述した位置標定の場合(式2)とΔθt2の符号が一致している。)とし、測定誤差をF2、マルチパスや反射波の影響分をM2(位相の測定に際して基準を同一にしているため、Δθt2と符号が一致している。)とすれば、次式で表すことができる。
Δθ2=−Δθt2+F2−M2 ・・・式10
【0076】
次に式9の両辺と式10の両辺との和を取れば次のようになる。
Δθ1+Δθ2=(Δθt1−Δθt2)+F1+F2+(M1−M2)・・・式11
【0077】
ここで前述したように、第1のアンテナ対と第2のアンテナ対は、第1のアンテナ対の各アンテナ251によって受信される位置標定信号900の経路差と第2のアンテナ対の各アンテナ251によって受信される位置標定信号900の経路差とが一致するように設けられているので、式7の右辺の(Δθt1−Δθt2)の値は0である。従って式11は次のようになる。
Δθ1+Δθ2=(F1+F2)+(M1−M2) ・・・式12
【0078】
ここでF1とF2が十分に安定している(時間変動が小さい)場合、(F1+F2)の値(F1とF2が等しければ(この値をFとする)(F1+F2)=2F)は、ほぼ一定とみなすことができる。このため、(F1+F2)が予め経験値等として知れていれば、式12の左辺の値Δθ1+Δθ2が(F1+F2)と一致するか否かを調べることにより、移動端末30から送られてくる位置標定信号900が直接波であるか否かを判定することができる(直接波の場合はM1=0、M2=0となるので(M1−M2)=0、直接波でない場合はM1≠0、M2≠0となるので(M1−M2)≠0)。
【0079】
尚、以上に説明した仕組み(判定原理(その2))は、前述したΔΦ(x),ΔΦ(y)のいずれを求める場合にも適用することができる。即ちΔΦ(x),ΔΦ(y)の夫々を求める場合は、夫々個別にマルチパスや反射波の有無を判定することができる。
【0080】
以上に説明したように、判定原理(その2)によれば、位相差Δθ1及び位相差Δθ2の夫々に含まれている誤差が間接波の影響による成分に比べて充分に安定しており、当該誤差の値(F1+F2)が経験値として与えられている限り、移動端末30から受信した位置標定信号900が直接波であるか否かを上記和に基づき確実に判定することができる。
【0081】
また判定原理(その2)では、移動端末30から受信した位置標定信号900が直接波であるか否かの判定を、移動端末30の位置を求めるために測定した位相差Δθ1及び位相差Δθ2(位相差Δθ1の測定結果に対して符号が反転する測定基準を用いて測定されたΔθ2)をそのまま利用して行うことができるので、移動端末30の位置標定と位置標定信号900が直接波か否かの判定とを一度の測定で済ますことができ、位置標定と直接波か否かの判定にかかる基地局20や移動端末30の処理負荷を低減することができる。
【0082】
=位置標定処理=
次に、以上に説明した位置標定システム1によって行われる位置標定に関する処理について具体的に説明する。
【0083】
<判定原理(その1)を用いた場合>
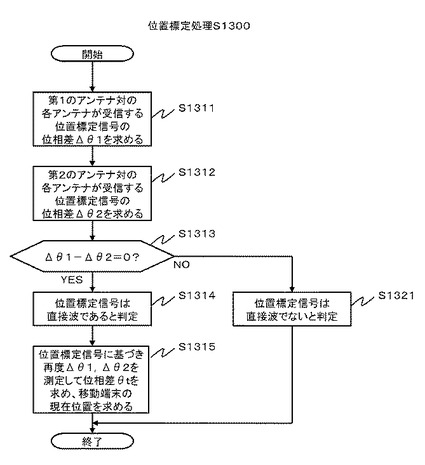
図13は、判定原理(その1)を用いた位置標定に際して基地局20にて行われる処理(以下、位置標定処理S1300と称する。)を説明するフローチャートである。以下、同図とともに説明する。
【0084】
まず基地局20は、第1のアンテナ対により移動端末30から送られてくる位置標定信号900を受信し、第1のアンテナ対の各アンテナ251によって受信される位置標定信号900の位相差Δθ1(第1アンテナ251aを基準として第2アンテナ251bの位相を測定した結果)を測定する。また基地局20は、第2のアンテナ対により移動端末30から送られてくる位置標定信号900を受信し、第2のアンテナ対の各アンテナ251によって受信される位置標定信号900の位相差Δθ2(第4アンテナ251dを基準として第3アンテナ251cの位相を測定した結果)を測定する(S1311)。
【0085】
次に基地局20は、S1311にて測定した位相差Δθ1と、S1312にて測定した位相差Δθ2との差が0であるか否かあるいは少なくとも予め設定された基準値以下であるか否か(両者が一致するか否か)を判定する(S1313)。
【0086】
上記判定の結果、位相差Δθ1と位相差Δθ2の差が0(あるいは少なくとも予め設定された基準値以下)であった場合(S1313:YES)、基地局20は、移動端末30から送信されてくる位置標定信号900は直接波であると判定し(S1314)、この場合は位置標定信号900に基づく測定を再度行い位相差Δθ1(=Δθt1+F1)及び位相差Δθ2(=−Δθt2+F2)を求め、前述した式4からθt(=(Δθ1−Δθ2)/2)を求めて移動端末30の現在位置を求める(S1315)。
【0087】
一方、上記判定の結果、位相差Δθ1と位相差Δθ2の差が0でない(あるいは少なくとも予め設定された基準値を超える)場合(S1313:NO)、基地局20は、移動端末30から送信されてくる位置標定信号900は直接波でない(マルチパス波や反射波等)と判定し(S1321)、処理は終了する。
【0088】
<判定原理(その2)を用いた場合>
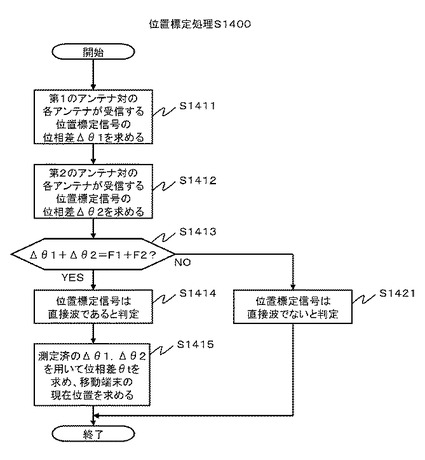
図14は、判定原理(その2)を用いた位置標定に際して基地局20にて行われる処理(以下、位置標定処理S1400と称する。)を説明するフローチャートである。以下、同図とともに説明する。
【0089】
まず基地局20は、第1のアンテナ対により移動端末30から送られてくる位置標定信号900を受信し、第1のアンテナ対の各アンテナ251によって受信される位置標定信号900の位相差Δθ1(第1アンテナ251aを基準として第2アンテナ251bの位相を測定した結果)を測定する(S1411)。
【0090】
また基地局20は、第2のアンテナ対により移動端末30から送られてくる位置標定信号900を受信し、第2のアンテナ対の各アンテナ251によって受信される位置標定信号900の位相差Δθ2(第3アンテナ251cを基準として第4アンテナ251dの位相を測定した結果)を測定する(S1412)。
【0091】
次に基地局20は、S1411にて測定した位相差Δθ1と、S1412にて測定した位相差Δθ2との和が(F1+F2)と一致するか否かを判定する(S1413)。そして上記判定の結果、和が(F1+F2)と一致する場合(S1413:YES)、基地局20は、移動端末30から送信されてくる位置標定信号900は直接波であると判定し(S1414)、この場合はS1411で測定した位相差Δθ1(=Δθt1+F1)及びS1412で測定した位相差Δθ2(=−Δθt2+F2)を用いて、前述した式4からθt(=(Δθ1−Δθ2)/2)を求めて移動端末30の現在位置を求める(S1415)。
【0092】
一方、上記判定の結果、位相差Δθ1と位相差Δθ2の和が(F1+F2)と一致しなければ(S1413:NO)、基地局20は、移動端末30から送信されてくる位置標定信号900は直接波でない(マルチパス波や反射波等)と判定し(S1421)、処理は終了する。
【0093】
以上に説明したように、本実施形態の位置標定システム1によれば、第1のアンテナ対の各アンテナ251によって受信される位置標定信号900の位相差Δθ1と、第2のアンテナ対の各アンテナ251によって受信される位置標定信号900の位相差Δθ2とに基づき、移動端末30から送られてくる位置標定信号900が直接波であるか否かを容易に判定することができる。また位置標定精度の向上を目的として基地局20に設けたアンテナ群25を利用して直接波か否かを判定するので、位置標定を行うための基本的な装置構成に対して特別な構成を設けることなく、直接波か否かを判定する仕組みを実現することができる。
【0094】
また基地局20は、移動端末30から受信した位置標定信号900が直接波であることを確認した上で移動端末30の位置標定を行うので、直接波として受信した位置標定信号900に基づき移動端末30の正確な位置を取得することができる。
【0095】
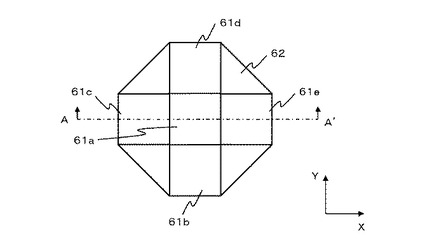
[移動端末のアンテナの構成例]
図14、図15に移動端末30のアンテナ341の一構成例(以下、アンテナ構造60と称する。)を示している。図14はアンテナ構造60の正面図(平面図)であり、図15は図14のアンテナ構造60を同図のA−A’線で切断して−Y方向から+Y方向に眺めた断面図である。
【0096】
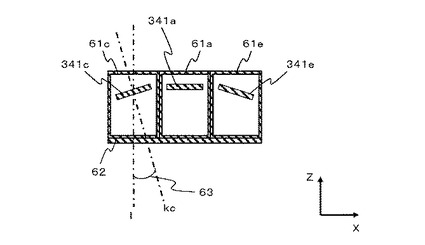
図14及び図15に示すように、略直方体形状の5つの筐体61a〜61eが所定厚の平面八角形状の支持筐体62の一方の面側に配置されている。このうち筐体61aは、支持筐体62の面中心に配置され、筐体61b〜61eは、支持筐体62の面中心の周りに互いに90°ずれた位置関係になるように支持筐体61aの各側面に隣接させて配置されている。4つの筐体61a〜61d及び支持筐体62は、例えば、位置標定信号900の透過性に優れた素材(例えば樹脂製の絶縁体)からなる。
【0097】
図15に示すように、筐体61aには、前述したアンテナ341として機能するアンテナ341a及び前述した無線モジュール33として機能する無線モジュール33a(不図示)が内蔵されている。筐体61bには、前述したアンテナ341として機能するアンテナ341b(不図示)及び前述した無線モジュール33として機能する無線モジュール33b(不図示)が内蔵されている。筐体61cには、前述したアンテナ341として機能するアンテナ341c及び前述した無線モジュール33として機能する無線モジュール33c(不図示)が内蔵されている。筐体61dには、前述したアンテナ341として機能するアンテナ341d(不図示)及び前述した無線モジュール33として機能する無線モジュール33d(不図示)が内蔵されている。筐体61eには、前述したアンテナ341として機能するアンテナ341e及び前述した無線モジュール33として機能する無線モジュール33e(不図示)が内蔵されている。
【0098】
同図に示すように、筐体61a〜61dの夫々内蔵されている各アンテナ341a〜341eは、夫々の指向方向が互いに異なるように設けられている(例えば、アンテナ341a〜341eの夫々の送信面(電波が放射される面)の法線ka〜ke(同図では法線keのみ示している)を、支持筐体62の上記中心を通る法線lに対して所定角度63(例えば0°〜45°)傾斜させて設ける)。
【0099】
各アンテナ341a〜341eからは、アンテナ341a〜341eの2つ以上から同時に位置標定信号900が送信されることがないように、順に(例えば時分割で)位置標定信号900が送信される。ここで前述したように、各アンテナ341a〜341eの指向方向はいずれも異なっているため、これらのうちのいくつかから送信された位置標定信号900がマルチパスとして基地局20に到達する場合でも、他のいくつかから送信された位置標定信号900については直接波として基地局20に到達する場合がある。このため、基地局20にて位置標定信号900を直接波として受信できる可能性が高まり、その結果、移動端末30の位置を正確に標定できる可能性を高めることができる。
【0100】
以上、実施形態について詳細に説明したが、以上の説明は、本発明の理解を容易にするためのものであり、本発明を限定するものではない。本発明はその趣旨を逸脱することなく、変更、改良され得ると共に本発明にはその等価物が含まれることは勿論である。
【0101】
例えば、基地局20に、夫々の指向方向を変えた複数のアンテナ群25を設置し、各アンテナ群25が順に(例えば時分割で)位置標定信号900を受信して直接波か否かの判定を行い、直接波を受信しているアンテナ群25を用いて移動端末30の位置標定を行うようにしてもよい。そのようにすれば基地局20にて位置標定信号900を直接波として受信できる可能性が高まり、その結果、移動端末30の位置を正確に標定できる可能性を高めることができる。
【0102】
また以上の実施形態では、移動端末30のアンテナ341から位置標定信号900を送信し、基地局20のアンテナ群25でこれを受信して、基地局20にて位置標定信号900が直接波であるか否かの判定や移動端末30の位置標定を行うようにしているが、位置標定信号900を基地局20から送信するようにし、移動端末30で位置標定信号900を受信して移動端末30にて位置標定信号900が直接波であるか否かの判定や自身の位置標定を行うようにしてもよい。また移動端末30にて標定した位置を示す情報を通信ネットワーク5や無線通信によりサーバ装置10や基地局20に送信するようにすれば、サーバ装置10や基地局20においても移動端末30の位置を取得することができる。
【0103】
またこの場合において、夫々の指向方向を変えた複数のアンテナ群25を設置し、各アンテナ群25から順に(例えば時分割で)位置標定信号900を送信するようにしてもよい。そのようにすれば移動端末30にて位置標定信号900を直接波として受信できる可能性が高まり、その結果、移動端末30の位置を正確に標定できる可能性を高めることができる。
【0104】
移動端末30は、例えば、アクティブ型もしくはパッシブ型のRFIDタグとして機能するものであってもよい。この場合、位置標定信号を、電磁誘導によってRFIDタグが備えるアンテナコイルから自発的にもしくは受動的に、基地局20に送信もしくは基地局20から受信するようにしてもよい。
【0105】
基地局20のアンテナ群25を屋内の構造物2に設ける際は、屋内に不感地帯ができない程度に広く、かつ、壁等からの反射波の影響が生じない程度に狭くなるように上記ビーム幅を適切に設定することが好ましい。
【符号の説明】
【0106】
1 位置標定システム
3 移動体
5 通信ネットワーク
10 サーバ装置
20 基地局
202 位置標定信号受信部
204 位置標定部
205 位置標定信号判定部
2051 第1位相差測定部
2052 第2位相差測定部
2053 直接波判定部
25 アンテナ群
251 アンテナ
251a 第1アンテナ
251b 第2アンテナ
251c 第3アンテナ
251d 第4アンテナ
30 移動端末
301 位置標定信号送信部
900 位置標定信号
341 アンテナ
S1300 位置標定処理
【技術分野】
【0001】
この発明は、位置標定方法、及び位置標定システムに関し、とくに移動体の位置の標定精度を向上させるための技術に関する。
【背景技術】
【0002】
特許文献1には、位置標定信号の受信信号強度履歴及び加速度センサ等の検知値から求めた移動履歴を記録しておき、受信した位置標定信号の受信信号強度から第1自由空間損失を求め、受信信号強度履歴から位置標定信号の受信信号強度が最大となった位置である起点位置を求め、起点位置と移動距離/方向履歴とに基づき、起点位置から現在位置までの距離を求め、求めた距離から位置標定信号の第2自由空間損失を求め、第1自由空間損失と第2自由空間損失とを比較することにより受信した位置標定信号が直接波であるか否かを判定し、直接波でないと判定した場合に受信した位置標定信号による位置標定を行わないようにすることが記載されている。
【0003】
非特許文献1には、基地局に設置した複数のアンテナから歩行者が携帯する携帯端末に無線信号を送信し、各アンテナから送信されてくる無線信号の位相差によって携帯端末とアンテナとの相対位置を求め、求めた相対位置(方向、距離)と基地局の絶対位置とから歩行者の現在位置を取得するようにした位置標定システムが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第4364917号公報
【非特許文献1】武内 保憲,河野 公則,河野 実則、” 2.4GHz帯を用いた場所検知システムの開発”、平成17年度 電気・情報関連学会中国支部第56回連合大会
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載されているように、直接波以外のマルチパスや反射波などの無線信号によって位置標定が行われてしまうと、標定精度が著しく低下してしまうことがある。また基地局や携帯端末が障害物の多い屋内等で用いられる場合には、位置標定信号が壁や金属構造物等によって反射されて直接波以外の無線信号が発生する可能性が高くなる。
【0006】
本発明はこのような課題に鑑みてなされたもので、移動体の位置の標定精度を向上させることが可能な位置標定方法、及び位置標定システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するための本発明の一つでは、移動体に設けられる移動端末から、当該移動端末の位置を標定するための無線信号である位置標定信号を送信し、所定の場所に設けた基地局に、第1のアンテナ対と第2のアンテナ対とを、前記第1のアンテナ対の各アンテナによって受信される前記位置標定信号の経路差と前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の経路差とが一致するように設け、前記基地局が、前記第1のアンテナ対の各アンテナ又は前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθに基づき前記移動端末が存在する方向を求め、求めた前記方向に基づき前記移動端末の位置を求める、移動体の位置を標定する方法であって、前記基地局が、前記第1のアンテナ対により前記移動端末から送られてくる前記位置標定信号を受信し、前記第1のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθ1を測定し、前記第2のアンテナ対により前記移動端末から送られてくる前記位置標定信号を受信し、前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθ2を測定し、測定した前記位相差Δθ1と前記位相差Δθ2とに基づき、前記移動端末から受信した位置標定信号が直接波であるか否かを判定する。
【0008】
本発明によれば、第1のアンテナ対の各アンテナによって受信される位置標定信号の位相差Δθ1と、第2のアンテナ対の各アンテナによって受信される位置標定信号の位相差Δθ2とに基づき、移動端末から送られてくる位置標定信号が直接波であるか否かを容易に判定することができる。
【0009】
本発明の他の一つは、上記位置標定方法であって、前記基地局は、前記移動端末の位置を、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果に対して符号が反転する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差を相殺すべく、前記位相差Δθ1と前記位相差Δθ2との差を取ることにより求め、前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定は、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果と符号が一致する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、これにより測定された前記位相差Δθ1と前記位相差Δθ2との差を取ることにより行う。
【0010】
また本発明の他の一つでは、前記基地局は、前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定を、前記差が0であるか否か、あるいは少なくとも予め設定された基準値以下であるか否かに基づき行う。
【0011】
位相差Δθ2の測定結果が位相差Δθ1の測定結果と符号が一致する測定基準を用いて位相差Δθ1及び位相差Δθ2を測定し、測定された位相差Δθ1と位相差Δθ2との差を取ることにより、位相差Δθ1及び位相差Δθ2の夫々に含まれている誤差が相殺され、移動端末から受信した位置標定信号が直接波でない場合は間接波の影響による成分のみが残る。このため、本発明によれば、移動端末から受信した位置標定信号が直接波であるか否かを上記差に基づき確実に判定することができる。
【0012】
また本発明によれば、移動端末から受信した位置標定信号が直接波であるか否かの判定を、位相差Δθ1の測定誤差と位相差Δθ2の測定誤差とを相殺すべく設けられた第1のアンテナ対と第2のアンテナ対を用いて行うことができる。このため、位置標定を行うための基本的な装置構成に対して特別な構成を設けることなく、直接波であるか否かを判定する仕組みを容易に実現することができる。
【0013】
本発明の他の一つは、上記位置標定方法であって、前記基地局は、前記移動端末の位置を、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果に対して符号が反転する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差を相殺すべく、前記位相差Δθ1と前記位相差Δθ2との差を取ることにより求め、前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定を、測定した前記位相差Δθ1と前記位相差Δθ2との和を取ることにより行う。
【0014】
また本発明の他の一つでは、前記基地局は、前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定を、前記和と測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差の和とを比較することにより行う。
【0015】
位相差Δθ2の測定結果が位相差Δθ1の測定結果と符号が反転する測定基準を用いて位相差Δθ1及び位相差Δθ2を測定し、測定した位相差Δθ1と位相差Δθ2との和を取ることにより、位相差Δθ1及び位相差Δθ2の夫々に含まれている誤差と間接波の影響による成分との総和を抽出することができる。ここで移動端末から受信した位置標定信号が直接波である場合は、上記総和のうち間接波の影響による成分は0あるいは少なくとも予め設定された基準値以下となり、測定した位相差Δθ1と位相差Δθ2との和は夫々に含まれている誤差の和と一致することとなる。このため、測定した位相差Δθ1と位相差Δθ2との和が夫々に含まれている誤差の和と一致するか否かを調べることにより、移動端末から受信した位置標定信号が直接波であるか否かを判定することができる。
【0016】
また本発明によれば、移動端末から受信した位置標定信号が直接波であるか否かの判定を移動端末の位置を求めるために測定した位相差Δθ1及び位相差Δθ2(位相差Δθ1の測定結果に対して符号が反転する測定基準を用いて測定されたΔθ2)を利用して行うことができるので、位置標定と直接波か否かの判定とを一度の測定で済ますことができ、位置標定と直接波か否かの判定にかかる基地局及び移動端末の負荷を低減することができる。
【0017】
本発明の他の一つは、上記位置標定方法であって、前記基地局は、前記判定により前記位置標定信号が直接波であると判定した場合に、前記位相差Δθ1又は前記位相差Δθ2から求まる位置を前記移動端末の現在位置として取得することとする。
【0018】
本発明によれば、基地局は、移動端末から送られてくる位置標定信号が直接波であることを確認した上で移動端末の位置標定を行うので、直接波として受信した位置標定信号に基づき移動端末の正確な位置を標定することができる。
【0019】
本発明の他の一つは、上記位置標定方法であって、第1のアンテナ対及び第2のアンテナ対は、第1のアンテナ対の各アンテナ及び第2のアンテナ対の各アンテナが等間隔を開けて平面上に正方形状に配置されていることとする。
【0020】
第1のアンテナ対の各アンテナ及び第2のアンテナ対の各アンテナをこのような配置とすることで、第1のアンテナ対の各アンテナによって受信される位置標定信号の経路差と第2のアンテナ対の各アンテナによって受信される位置標定信号の経路差とを一致させることができる。
【0021】
その他、本願が開示する課題、及びその解決方法は、発明を実施するための形態の欄、及び図面により明らかにされる。
【発明の効果】
【0022】
本発明によれば、位置標定システムによる移動体の位置の標定精度を向上させることができる。
【図面の簡単な説明】
【0023】
【図1】第1実施形態の位置標定システム1の概略的な構成を示す図である。
【図2】サーバ装置10のハードウエア構成を説明する図である。
【図3】サーバ装置10の機能を説明する図である。
【図4】移動端末30のハードウエア構成を説明する図である。
【図5】移動端末30の主な機能を説明する図である。
【図6】基地局20のハードウエア構成を説明する図である。
【図7】基地局20の主な機能を説明する図である。
【図8】位置標定信号判定部205の機能の詳細を説明する図である。
【図9】位置標定信号900のデータフォーマットの一例を示す図である。
【図10】基地局20の設置現場周辺の様子の一例を示す図である。
【図11】アンテナ群25を構成している各アンテナ251と移動端末30の位置関係を説明する図である。
【図12】基地局20と移動端末30の位置関係を説明する図である。
【図13】位置標定処理S1300を説明するフローチャートである。
【図14】位置標定処理S1400を説明するフローチャートである。
【図15】移動端末30のアンテナ341の一構成例として示すアンテナ構造60の正面図(平面図)である。
【図16】移動端末30のアンテナ341の一構成例として示すアンテナ構造60の側面図である。
【発明を実施するための形態】
【0024】
図1に実施形態として説明する位置標定システム1の概略的な構成を示している。位置標定システム1は、例えば、移動体3(車両や歩行者等)の現在位置を監視するシステム、移動体3の安全確保に関するシステム、移動体3に対する道案内や目的地までの誘導を行うシステム、移動体3に対して現在地周辺の情報等を提供するシステム、地下街やビル街等における移動体3(人)の避難誘導システム、倉庫や工場等における移動体3(商品や搬送車両等)の流れを管理するシステム、工場等における移動体3(ロボット、搬送車両等)の誘導システムなどに適用される。
【0025】
位置標定システム1は、データセンタなどに設けられるサーバ装置10、位置標定システム1が適用される地域の各所に設けられる複数の基地局20、及び移動体3に搭載もしくは携帯される移動端末30などを含んで構成されている。基地局20は、構造物2(屋内であれば建物の壁や柱等、屋外であれば電柱等)の所定の高さ位置に設けられる。基地局20及び移動端末30は、有線もしくは無線による通信ネットワーク5(専用線、公衆回線、インターネット等)を介してサーバ装置10と通信可能に接続している。
【0026】
図2にサーバ装置10のハードウエア構成を示している。同図に示すように、サーバ装置10は、CPUやMPUなどを用いて構成される中央処理装置11、半導体メモリ(RAM、ROM、NVRAM等)やハードディスク装置などで構成される記憶装置12、キーボードやマウスなどの入力装置13、液晶ディスプレイなどの表示装置14、サーバ装置10を通信ネットワーク5に接続するための通信インタフェース15などを備える。各構成要素はバス18を介して通信可能に接続されている。表示装置14には、例えば、移動体3(移動端末30)の現在位置や移動方向などを示す情報がリアルタイムに表示される。
【0027】
図3にサーバ装置10の機能を示している。同図に示すように、サーバ装置10は、情報収集部101、情報提供部102、及び設定情報記憶部103を備える。これらの機能は、サーバ装置10が備えるハードウエアにより、もしくは、サーバ装置10の中央処理装置11が記憶装置12に格納されているプログラムを読み出して実行することにより実現される。
【0028】
情報収集部101は、基地局20もしくは移動端末30から、移動端末30の現在位置等の情報を随時収集する。情報提供部102は、例えば、移動端末30もしくは基地局20に対し、道案内情報、目的地までの誘導情報、現在位置周辺の地理情報、移動体3の現在位置や移動方向等の監視情報、移動体3の安全確保に関する情報などの各種の情報を随時提供する。設定情報記憶部103は、例えば、基地局20の設置位置を示す情報(緯度、経度、設置高さ等)などを設定情報として記憶する。
【0029】
図4に移動端末30のハードウエア構成を示している。同図に示すように、移動端末30は、CPUやMPUなどを用いて構成される中央処理装置31、半導体メモリ(RAM、ROM、NVRAM等)やハードディスク装置などで構成される記憶装置32、後述する位置標定信号の送信や他の装置との間での無線通信を行う無線通信インタフェース33、無線通信インタフェース33によって行われる無線通信に用いられるアンテナ341、タッチパネルや操作ボタンなどの入力装置35、及び液晶ディスプレイや有機ELディスプレイなどの表示装置36を備える。各構成要素はバス38を介して通信可能に接続されている。
【0030】
アンテナ341としては、例えば、指向性アンテナや円偏波指向性アンテナを用いる。とくに移動端末30を壁等の障害物が存在する屋内等で用いる場合には、アンテナ341として円偏波指向性アンテナを用いることが好ましい。円偏波の反射波(又は定在波)の偏波面は、壁等の障害物で反射した際に反転するが、円偏波指向性アンテナを用いることで反射波や定在波を効果的に減衰させることができる。
【0031】
図5に移動端末30の主な機能を示している。同図に示すように、移動端末30は、位置標定信号送信部301、情報送受信部302、及び情報表示部303を備える。これらの機能は、移動端末30が備えるハードウエアにより、もしくは、移動端末30の中央処理装置31が記憶装置32に格納されているプログラムを読み出して実行することにより実現される。
【0032】
上記機能のうち位置標定信号送信部301は、移動端末30の現在位置の標定に用いられる無線信号(以下、位置標定信号と称する)を無線通信インタフェース33によって送信する。
【0033】
情報送受信部302は、無線通信インタフェース33による無線通信や通信ネットワーク5による有線通信によりサーバ装置10もしくは基地局20と通信し、移動体3に提示するための情報の受信(ダウンロード)や、サーバ装置10もしくは基地局20で用いられる各種情報の送信(アップロード)などを行う。情報表示部303は、移動体3などに提示する情報を表示装置36に出力する。
【0034】
図6に基地局20のハードウエア構成を示している。同図に示すように、基地局20は、CPUやMPUなどを用いて構成される中央処理装置21、半導体メモリ(RAM、ROM、NVRAM等)やハードディスク装置などで構成される記憶装置22、基地局20を通信ネットワーク5に接続するための通信インタフェース23、無線通信を行う無線通信インタフェース24、アンテナ群25、及びアンテナ切替スイッチ26などを備える。各構成要素は、バス28を介して通信可能に接続されている。
【0035】
中央処理装置21は、記憶装置22に格納されているプログラムを読み出して実行することにより基地局20が備える各種の機能を実現する。無線通信インタフェース24は、移動端末30から送信された位置標定信号を受信する。
【0036】
アンテナ群25は、少なくとも4つのアンテナ251(指向性アンテナ、円偏波指向性アンテナ等)を含む。アンテナ切替スイッチ26は、アンテナ群25を構成しているいずれかのアンテナ251を選択し、選択したアンテナ251を無線通信インタフェース24に接続する。尚、基地局20を壁等の障害物が存在する屋内等で用いる場合は、アンテナ群25を構成するアンテナ251として円偏波指向性アンテナを用いることが好ましい。円偏波の反射波(又は定在波)の偏波面は壁等での反射時に反転するため、円偏波指向性アンテナを用いることにより反射波(又は定在波)を効果的に減衰させることができる。
【0037】
図7に基地局20の主な機能を示している。同図に示すように、基地局20は、通信処理部201、位置標定信号受信部202、設定情報記憶部203、位置標定部204、及び位置標定信号判定部205を備える。尚、これらの機能は、基地局20が備えるハードウエアによって、もしくは、基地局20の中央処理装置21が記憶装置22に格納されているプログラムを読み出して実行することにより実現される。
【0038】
通信処理部201は、無線通信インタフェース24や通信インタフェース23によって移動端末30やサーバ装置10との間でデータの送信又は受信を行う。
【0039】
位置標定信号受信部202は、無線通信インタフェース24及びアンテナ切替スイッチ26を制御して移動端末30から送信される位置標定信号を受信する。
【0040】
設定情報記憶部203は、前述した設定情報(例えば、当該基地局20の現在位置を示す情報(緯度、経度、設置高さ等))を記憶する。
【0041】
位置標定部204は、位置標定信号受信部202が受信した位置標定信号に基づき移動端末30の現在位置を標定する。位置標定部204によって行われる位置標定の仕組みについては後述する。尚、位置標定部204によって標定された移動端末30の現在位置は、通信処理部201によってサーバ装置10や移動端末30に随時送信される。
【0042】
位置標定信号判定部205は、移動端末30から送信された位置標定信号が直接波であるか否かを判定する。
【0043】
図8に位置標定信号判定部205の詳細を示している。同図に示すように、位置標定信号判定部205は、第1位相差測定部2051、第2位相差測定部2052、及び直接波判定部2053を備える。
【0044】
第1位相差測定部2051は、基地局20の4つのアンテナ251のうち第1アンテナ251及び第2アンテナ251(以下、第1アンテナ251及び第2アンテナ251の組を第1のアンテナ対と称する。)により移動端末30から送られてくる位置標定信号を受信し、第1アンテナ251及び第2アンテナ251の夫々が受信した位置標定信号の位相差Δθ1を測定する。
【0045】
第2位相差測定部2052は、基地局20の4つのアンテナ251のうち第3アンテナ251及び第4アンテナ251(以下、第3アンテナ251及び第4アンテナ251の組を第2のアンテナ対と称する。)により移動端末30から送られてくる位置標定信号を受信し、第3アンテナ251及び第4アンテナ251の夫々が受信した位置標定信号の位相差Δθ2を測定する。
【0046】
尚、第1のアンテナ対と第2のアンテナ対は、第1のアンテナ対の各アンテナ251によって受信される位置標定信号の経路差と第2のアンテナ対の各アンテナ251によって受信される位置標定信号の経路差とが一致するように位置決めされて設けられる。
【0047】
直接波判定部2053は、第1位相差測定部2051によって取得される位相差Δθ1と、第2位相差測定部2052によって取得される位相差Δθ2とを比較することにより、移動端末30から送られてくる位置標定信号が直接波であるか否か(マルチパス波や反射波等でないか)を判定する。
【0048】
<位置標定の仕組み>
次に位置標定の仕組みについて説明する。移動端末30の位置標定信号送信部301は、自身に備えられているアンテナ341から位置標定信号を送信する。一方、基地局20の無線通信インタフェース23は、アンテナ群25を構成している複数のアンテナ251を周期的に切り換えながら、スペクトル拡散された無線信号からなる位置標定信号を受信する。
【0049】
図9は移動端末30から送信される位置標定信号のデータフォーマットの一例である。同図に示すように、位置標定信号900には、制御信号911、測定信号912、及び端末情報913などの信号及び情報が含まれている。
【0050】
このうち制御信号911には、変調波や各種の制御信号が含まれている。測定信号912には、数m秒程度の無変調波(例えば、基地局20に対する移動端末30の存在する方向や基地局20に対する移動端末30までの相対距離の検出に用いる信号(例えば、2048チップの拡散符号))が含まれている。端末情報913には、移動端末30を識別する情報(以下、移動端末IDと称する。)が含まれている。
【0051】
図10は基地局20と移動端末30の位置関係を例示したものである。同図に示すように、移動端末30が地上高1(m)の位置に存在し、基地局20が地上高H(m)の位置に固定されている。基地局20の直下から移動端末30までの直線距離はL(m)である。
【0052】
図11に基地局20のアンテナ群25を構成している複数のアンテナ251と移動端末30との関係を示している。同図に示すように、アンテナ群25は、位置標定信号900の1波長(12.5cm)以下の間隔をあけて平面的に略正方形状に等間隔で隣接配置された4つの円偏波指向性アンテナ(以下、アンテナ251a〜251dと称する。)を含んで構成されている。尚、各アンテナ251a〜251dは、例えば、いずれも指向方向を斜め下方向に向けて設置されている。
【0053】
尚、本実施形態では、前述した第1アンテナ251はアンテナ251aであり、第2アンテナ251はアンテナ251bであり、第3アンテナ251はアンテナ251cであり、第4アンテナ251はアンテナ251dであるものとする。
【0054】
同図において、アンテナ群25の高さ位置における水平方向とアンテナ群25に対する移動端末30の方向とのなす角をαとすれば、例えば、
α=arcTan(D(m)/L(m))=arcSin(ΔL(cm)/3(cm))
の関係となる。尚、ΔL(cm)は、アンテナ群25を構成しているアンテナ251のうち、特定の2つのアンテナ251と移動端末30との間の伝搬路長の差(以下、経路差とも称する。)である。
【0055】
ここでアンテナ群25を構成している特定の2つのアンテナ251で受信される位置標定信号900の位相差をΔθとすると、
ΔL(cm)=Δθ/(2π/λ(cm))
の関係がある。また位置標定信号900として、例えば、2.4GHz帯の電波を用いた場合はλ≒12(cm)であるので、
α=arcSin(Δθ/π)
の関係がある。また測定可能範囲(−π/2<Δθ<π/2)内では、α=Δθ(ラジアン)となるので、上式から基地局20が存在する方向を特定することができる。
【0056】
図12に基地局20の設置現場における、基地局20と移動端末30の位置関係を示している。同図に示すように、基地局20のアンテナ群25の地上高をH(m)、移動端末30の地上高をh(m)、基地局20の直下の地表面の位置を原点として直交座標軸(X軸、Y軸)を設定した場合における、基地局20から移動端末30の方向とX軸とがなす角をΔΦ(x)、基地局20から移動端末30の方向とY軸とがなす角をΔΦ(y)とすれば、原点に対する移動端末30の位置は次式から求めることができる。
Δd(x)=(H−h)×Tan(ΔΦ(x))
Δd(y)=(H−h)×Tan(ΔΦ(y))
そして原点の位置を(X1,Y1)とすれば、移動端末30の現在位置(Xx,Yy)は次式から求めることができる。
Xx=X1+Δd(x)
Yy=Y1+Δd(y)
【0057】
以上に説明した位置標定の方法については、例えば、特開2004−184078号公報、特開2005−351877号公報、特開2005−351878号公報、及び特開2006−23261号公報等にも詳述されている。
【0058】
<位置標定精度の向上>
ところで、以上のようにして行われる位置標定に際しては、基地局20と移動端末30の水晶発振器に生じる周波数偏差を要因とする誤差が問題となる。例えば、水晶発振器の周波数安定度が±0.5ppmであれば基地局20と移動端末30との間で最大1ppmの周波数偏差(2400Hz)が生じ、アンテナ切替スイッチ26の切替周期が32μsであれば2400Hz×32μs×360°=27.65°の位相差(誤差)が生じることになる。そこで本実施形態の位置標定システム1では、この測定誤差を次のようにして相殺するようにしている。
【0059】
まず第1のアンテナ対の各アンテナ(第1アンテナ251a及び第2アンテナ251b)が受信する位置標定信号900の位相差Δθ1(第1アンテナ251aを基準として第2アンテナ251bの位相を測定した結果)は、移動端末30から第1アンテナ251aまでの位置標定信号900の伝搬経路と、移動端末30から第2アンテナ251bまでの位置標定信号900の伝搬経路との差(経路差)によって生じる位相差をΔθt1とし、測定誤差をF1とすれば、次式で表すことができる。
Δθ1=Δθt1+F1 ・・・式1
【0060】
一方、第2のアンテナ対の各アンテナ(第3アンテナ251c及び第4アンテナ251d)が受信する位置標定信号900の位相差Δθ2(第3アンテナ251cを基準として第4アンテナ251dの位相を測定した結果)は、移動端末30から第3アンテナ251cまでの位置標定信号900の伝搬経路と、移動端末30から第4アンテナ251dまでの位置標定信号900の伝搬経路との差(経路差)によって生じる位相差をΔθt2とし、測定誤差をF2とすれば、次式で表すことができる。
Δθ2=−Δθt2+F2 ・・・式2
【0061】
次に式1の両辺から式2の両辺を夫々引くと次のようになる。
Δθ1−Δθ2=(Δθt1−(−Δθt2))+(F1−F2) ・・・式3
【0062】
ここで前述したように、第1のアンテナ対と第2のアンテナ対は、第1のアンテナ対の各アンテナ251a,251bによって受信される位置標定信号900の経路差と第2のアンテナ対の各アンテナ251c,251dによって受信される位置標定信号900の経路差とが一致するように設けられている。そこでこの値をθtとすれば、右辺の(Δθt1−(−Δθt2))の値は2θtとなる。また誤差F1,F2は、第1のアンテナ対の測定時と第2のアンテナ対の測定時で通常はほぼ同じであるので、右辺の(F1−F2)の値は限りなく0に近くなる。そこでこれらの値を式3に代入して式を変形すれば次のようになる。
θt=(Δθ1−Δθ2)/2 ・・・式4
【0063】
このように第1のアンテナ対と第2のアンテナ対の夫々によって位相差を測定することにより夫々の測定誤差F1,F2を相殺することができ、経路差による位相差θtを高精度で取得することができる。このため、位置標定の精度を高めることができる。尚、位相を測定する側にAGC(Automatic Gain Controller)等を設けて周波数偏差を減少させるようにすれば、式3の右辺の(F1−F2)の値をさらに0に近づけることができ、位置標定の精度をさらに高めることができる。
【0064】
=直接波か否かの判定原理=
次に移動端末30から送られてくる位置標定信号900が直接波であるか否かを判定する2つの原理(以下、判定原理(その1)、判定原理(その2)と称する)の夫々について説明する。
【0065】
<判定原理(その1)>
判定原理(その1)では、基地局20は、第1のアンテナ対の各アンテナによって受信された位置標定信号900の位相差Δθ1を測定(第1アンテナ251aを基準として第2アンテナ251bの位相を測定)し、また第2のアンテナ対の各アンテナによって受信された位置標定信号900の位相差Δθ2を測定(第4アンテナ251dを基準として第3アンテナ251cの位相を測定)し、測定した位相差Δθ1と位相差Δθ2とに基づき、移動端末30から送られてくる位置標定信号900が直接波であるか否かの判定を行う。
【0066】
ここで第1のアンテナ対の各アンテナ(第1アンテナ251a及び第2アンテナ251b)が受信する位置標定信号900の位相差Δθ1(第1アンテナ251aを基準として第2アンテナ251bの位相を測定した結果)は、移動端末30から第1アンテナ251aまでの位置標定信号900の伝搬経路と、移動端末30から第2アンテナ251bまでの位置標定信号900の伝搬経路との差(経路差)によって生じる位相差をΔθt1とし、測定誤差をF1、マルチパスや反射波の影響分をM1とすれば、次式で表すことができる。
Δθ1=Δθt1+F1+M1 ・・・式5
【0067】
また第2のアンテナ対の各アンテナ(第3アンテナ251c及び第4アンテナ251d)が受信する位置標定信号900の位相差Δθ2(第4アンテナ251dを基準として第3アンテナ251cの位相を測定した結果)は、移動端末30から第3アンテナ251cまでの位置標定信号900の伝搬経路と、移動端末30から第4アンテナ251dまでの位置標定信号900の伝搬経路との差(経路差)によって生じる位相差をΔθt2(位相の測定に際して基準を逆にしているため、前述した位置標定の場合(式2)とΔθt2の符号が反転している。)とし、測定誤差をF2、マルチパスや反射波の影響分をM2とすれば、次式で表すことができる。
Δθ2=Δθt2+F2+M2 ・・・式6
【0068】
次に式5の両辺と式6の両辺との差を取れば次のようになる。
Δθ1−Δθ2=(Δθt1−Δθt2)+(F1−F2)+(M1−M2)
・・・式7
【0069】
ここで前述したように、第1のアンテナ対と第2のアンテナ対は、第1のアンテナ対の各アンテナ251によって受信される位置標定信号900の経路差と第2のアンテナ対の各アンテナ251によって受信される位置標定信号900の経路差とが一致するように設けられているので、式7の右辺の(Δθt1−Δθt2)の値は限りなく0に近くなる。また前述したように誤差F1,F2は、第1のアンテナ対の測定時と第2のアンテナ対の測定時で通常はほぼ同じであるので、式7の右辺の(F1−F2)の値は限りなく0に近くなる。そこでこれらの値を代入すれば式7は次のようになる。
Δθ1−Δθ2=M1−M2 ・・・式8
【0070】
ここで第1のアンテナ対の各アンテナと第2のアンテナ対の各アンテナは、図11に示すように物理的な配置位置が異なっているので、各アンテナに対するマルチパスや反射波による影響は夫々異なり、位置標定信号900がマルチパスや反射波であった場合にはM1≠M2となる。逆に位置標定信号900が直接波であった場合はM1=M2となる。このため、位相差Δθ1と位相差Δθ2とが一致するか否か(両者の差が0か否か、あるいは少なくとも予め設定された基準値以下であるか否か)を調べることで移動端末30から送られてくる位置標定信号が直接波であるか否かを判定することができる。
【0071】
尚、以上に説明した仕組み(判定原理(その1))は、前述したΔΦ(x),ΔΦ(y)のいずれを求める場合にも適用することができる。即ちΔΦ(x),ΔΦ(y)の夫々を求める場合は、夫々個別にマルチパスや反射波の有無を判定することができる。
【0072】
以上に説明したように、判定原理(その1)によれば、移動端末30から受信した位置標定信号900が直接波であるか否かを上記差に基づき確実に判定することができる。
【0073】
<判定原理(その2)>
判定原理(その2)では、基地局20は、第1のアンテナ対の各アンテナによって受信された位置標定信号900の位相差Δθ1を測定(第1アンテナ251aを基準として第2アンテナ251bの位相を測定)し、また第2のアンテナ対の各アンテナによって受信された位置標定信号900の位相差Δθ2を測定(第3アンテナ251cを基準として第4アンテナ251dの位相を測定)し、測定した位相差Δθ1と位相差Δθ2とに基づき移動端末30から送られてくる位置標定信号900が直接波であるか否かの判定を行う。
【0074】
ここで第1のアンテナ対の各アンテナ(第1アンテナ251a及び第2アンテナ251b)が受信する位置標定信号900の位相差Δθ1(第1アンテナ251aを基準として第2アンテナ251bの位相を測定した結果)は、移動端末30から第1アンテナ251aまでの位置標定信号900の伝搬経路と、移動端末30から第2アンテナ251bまでの位置標定信号900の伝搬経路との差(経路差)によって生じる位相差をΔθt1とし、測定誤差をF1、マルチパスや反射波の影響分をM1とすれば、次式で表すことができる。
Δθ1=Δθt1+F1+M1 ・・・式9
【0075】
また第2のアンテナ対の各アンテナ(第3アンテナ251c及び第4アンテナ251d)が受信する位置標定信号900の位相差Δθ2(第3アンテナ251cを基準として第4アンテナ251dの位相を測定した結果)は、移動端末30から第3アンテナ251cまでの位置標定信号900の伝搬経路と、移動端末30から第4アンテナ251dまでの位置標定信号900の伝搬経路との差(経路差)によって生じる位相差をΔθt2(位相の測定に際して基準を同一にしているため、前述した位置標定の場合(式2)とΔθt2の符号が一致している。)とし、測定誤差をF2、マルチパスや反射波の影響分をM2(位相の測定に際して基準を同一にしているため、Δθt2と符号が一致している。)とすれば、次式で表すことができる。
Δθ2=−Δθt2+F2−M2 ・・・式10
【0076】
次に式9の両辺と式10の両辺との和を取れば次のようになる。
Δθ1+Δθ2=(Δθt1−Δθt2)+F1+F2+(M1−M2)・・・式11
【0077】
ここで前述したように、第1のアンテナ対と第2のアンテナ対は、第1のアンテナ対の各アンテナ251によって受信される位置標定信号900の経路差と第2のアンテナ対の各アンテナ251によって受信される位置標定信号900の経路差とが一致するように設けられているので、式7の右辺の(Δθt1−Δθt2)の値は0である。従って式11は次のようになる。
Δθ1+Δθ2=(F1+F2)+(M1−M2) ・・・式12
【0078】
ここでF1とF2が十分に安定している(時間変動が小さい)場合、(F1+F2)の値(F1とF2が等しければ(この値をFとする)(F1+F2)=2F)は、ほぼ一定とみなすことができる。このため、(F1+F2)が予め経験値等として知れていれば、式12の左辺の値Δθ1+Δθ2が(F1+F2)と一致するか否かを調べることにより、移動端末30から送られてくる位置標定信号900が直接波であるか否かを判定することができる(直接波の場合はM1=0、M2=0となるので(M1−M2)=0、直接波でない場合はM1≠0、M2≠0となるので(M1−M2)≠0)。
【0079】
尚、以上に説明した仕組み(判定原理(その2))は、前述したΔΦ(x),ΔΦ(y)のいずれを求める場合にも適用することができる。即ちΔΦ(x),ΔΦ(y)の夫々を求める場合は、夫々個別にマルチパスや反射波の有無を判定することができる。
【0080】
以上に説明したように、判定原理(その2)によれば、位相差Δθ1及び位相差Δθ2の夫々に含まれている誤差が間接波の影響による成分に比べて充分に安定しており、当該誤差の値(F1+F2)が経験値として与えられている限り、移動端末30から受信した位置標定信号900が直接波であるか否かを上記和に基づき確実に判定することができる。
【0081】
また判定原理(その2)では、移動端末30から受信した位置標定信号900が直接波であるか否かの判定を、移動端末30の位置を求めるために測定した位相差Δθ1及び位相差Δθ2(位相差Δθ1の測定結果に対して符号が反転する測定基準を用いて測定されたΔθ2)をそのまま利用して行うことができるので、移動端末30の位置標定と位置標定信号900が直接波か否かの判定とを一度の測定で済ますことができ、位置標定と直接波か否かの判定にかかる基地局20や移動端末30の処理負荷を低減することができる。
【0082】
=位置標定処理=
次に、以上に説明した位置標定システム1によって行われる位置標定に関する処理について具体的に説明する。
【0083】
<判定原理(その1)を用いた場合>
図13は、判定原理(その1)を用いた位置標定に際して基地局20にて行われる処理(以下、位置標定処理S1300と称する。)を説明するフローチャートである。以下、同図とともに説明する。
【0084】
まず基地局20は、第1のアンテナ対により移動端末30から送られてくる位置標定信号900を受信し、第1のアンテナ対の各アンテナ251によって受信される位置標定信号900の位相差Δθ1(第1アンテナ251aを基準として第2アンテナ251bの位相を測定した結果)を測定する。また基地局20は、第2のアンテナ対により移動端末30から送られてくる位置標定信号900を受信し、第2のアンテナ対の各アンテナ251によって受信される位置標定信号900の位相差Δθ2(第4アンテナ251dを基準として第3アンテナ251cの位相を測定した結果)を測定する(S1311)。
【0085】
次に基地局20は、S1311にて測定した位相差Δθ1と、S1312にて測定した位相差Δθ2との差が0であるか否かあるいは少なくとも予め設定された基準値以下であるか否か(両者が一致するか否か)を判定する(S1313)。
【0086】
上記判定の結果、位相差Δθ1と位相差Δθ2の差が0(あるいは少なくとも予め設定された基準値以下)であった場合(S1313:YES)、基地局20は、移動端末30から送信されてくる位置標定信号900は直接波であると判定し(S1314)、この場合は位置標定信号900に基づく測定を再度行い位相差Δθ1(=Δθt1+F1)及び位相差Δθ2(=−Δθt2+F2)を求め、前述した式4からθt(=(Δθ1−Δθ2)/2)を求めて移動端末30の現在位置を求める(S1315)。
【0087】
一方、上記判定の結果、位相差Δθ1と位相差Δθ2の差が0でない(あるいは少なくとも予め設定された基準値を超える)場合(S1313:NO)、基地局20は、移動端末30から送信されてくる位置標定信号900は直接波でない(マルチパス波や反射波等)と判定し(S1321)、処理は終了する。
【0088】
<判定原理(その2)を用いた場合>
図14は、判定原理(その2)を用いた位置標定に際して基地局20にて行われる処理(以下、位置標定処理S1400と称する。)を説明するフローチャートである。以下、同図とともに説明する。
【0089】
まず基地局20は、第1のアンテナ対により移動端末30から送られてくる位置標定信号900を受信し、第1のアンテナ対の各アンテナ251によって受信される位置標定信号900の位相差Δθ1(第1アンテナ251aを基準として第2アンテナ251bの位相を測定した結果)を測定する(S1411)。
【0090】
また基地局20は、第2のアンテナ対により移動端末30から送られてくる位置標定信号900を受信し、第2のアンテナ対の各アンテナ251によって受信される位置標定信号900の位相差Δθ2(第3アンテナ251cを基準として第4アンテナ251dの位相を測定した結果)を測定する(S1412)。
【0091】
次に基地局20は、S1411にて測定した位相差Δθ1と、S1412にて測定した位相差Δθ2との和が(F1+F2)と一致するか否かを判定する(S1413)。そして上記判定の結果、和が(F1+F2)と一致する場合(S1413:YES)、基地局20は、移動端末30から送信されてくる位置標定信号900は直接波であると判定し(S1414)、この場合はS1411で測定した位相差Δθ1(=Δθt1+F1)及びS1412で測定した位相差Δθ2(=−Δθt2+F2)を用いて、前述した式4からθt(=(Δθ1−Δθ2)/2)を求めて移動端末30の現在位置を求める(S1415)。
【0092】
一方、上記判定の結果、位相差Δθ1と位相差Δθ2の和が(F1+F2)と一致しなければ(S1413:NO)、基地局20は、移動端末30から送信されてくる位置標定信号900は直接波でない(マルチパス波や反射波等)と判定し(S1421)、処理は終了する。
【0093】
以上に説明したように、本実施形態の位置標定システム1によれば、第1のアンテナ対の各アンテナ251によって受信される位置標定信号900の位相差Δθ1と、第2のアンテナ対の各アンテナ251によって受信される位置標定信号900の位相差Δθ2とに基づき、移動端末30から送られてくる位置標定信号900が直接波であるか否かを容易に判定することができる。また位置標定精度の向上を目的として基地局20に設けたアンテナ群25を利用して直接波か否かを判定するので、位置標定を行うための基本的な装置構成に対して特別な構成を設けることなく、直接波か否かを判定する仕組みを実現することができる。
【0094】
また基地局20は、移動端末30から受信した位置標定信号900が直接波であることを確認した上で移動端末30の位置標定を行うので、直接波として受信した位置標定信号900に基づき移動端末30の正確な位置を取得することができる。
【0095】
[移動端末のアンテナの構成例]
図14、図15に移動端末30のアンテナ341の一構成例(以下、アンテナ構造60と称する。)を示している。図14はアンテナ構造60の正面図(平面図)であり、図15は図14のアンテナ構造60を同図のA−A’線で切断して−Y方向から+Y方向に眺めた断面図である。
【0096】
図14及び図15に示すように、略直方体形状の5つの筐体61a〜61eが所定厚の平面八角形状の支持筐体62の一方の面側に配置されている。このうち筐体61aは、支持筐体62の面中心に配置され、筐体61b〜61eは、支持筐体62の面中心の周りに互いに90°ずれた位置関係になるように支持筐体61aの各側面に隣接させて配置されている。4つの筐体61a〜61d及び支持筐体62は、例えば、位置標定信号900の透過性に優れた素材(例えば樹脂製の絶縁体)からなる。
【0097】
図15に示すように、筐体61aには、前述したアンテナ341として機能するアンテナ341a及び前述した無線モジュール33として機能する無線モジュール33a(不図示)が内蔵されている。筐体61bには、前述したアンテナ341として機能するアンテナ341b(不図示)及び前述した無線モジュール33として機能する無線モジュール33b(不図示)が内蔵されている。筐体61cには、前述したアンテナ341として機能するアンテナ341c及び前述した無線モジュール33として機能する無線モジュール33c(不図示)が内蔵されている。筐体61dには、前述したアンテナ341として機能するアンテナ341d(不図示)及び前述した無線モジュール33として機能する無線モジュール33d(不図示)が内蔵されている。筐体61eには、前述したアンテナ341として機能するアンテナ341e及び前述した無線モジュール33として機能する無線モジュール33e(不図示)が内蔵されている。
【0098】
同図に示すように、筐体61a〜61dの夫々内蔵されている各アンテナ341a〜341eは、夫々の指向方向が互いに異なるように設けられている(例えば、アンテナ341a〜341eの夫々の送信面(電波が放射される面)の法線ka〜ke(同図では法線keのみ示している)を、支持筐体62の上記中心を通る法線lに対して所定角度63(例えば0°〜45°)傾斜させて設ける)。
【0099】
各アンテナ341a〜341eからは、アンテナ341a〜341eの2つ以上から同時に位置標定信号900が送信されることがないように、順に(例えば時分割で)位置標定信号900が送信される。ここで前述したように、各アンテナ341a〜341eの指向方向はいずれも異なっているため、これらのうちのいくつかから送信された位置標定信号900がマルチパスとして基地局20に到達する場合でも、他のいくつかから送信された位置標定信号900については直接波として基地局20に到達する場合がある。このため、基地局20にて位置標定信号900を直接波として受信できる可能性が高まり、その結果、移動端末30の位置を正確に標定できる可能性を高めることができる。
【0100】
以上、実施形態について詳細に説明したが、以上の説明は、本発明の理解を容易にするためのものであり、本発明を限定するものではない。本発明はその趣旨を逸脱することなく、変更、改良され得ると共に本発明にはその等価物が含まれることは勿論である。
【0101】
例えば、基地局20に、夫々の指向方向を変えた複数のアンテナ群25を設置し、各アンテナ群25が順に(例えば時分割で)位置標定信号900を受信して直接波か否かの判定を行い、直接波を受信しているアンテナ群25を用いて移動端末30の位置標定を行うようにしてもよい。そのようにすれば基地局20にて位置標定信号900を直接波として受信できる可能性が高まり、その結果、移動端末30の位置を正確に標定できる可能性を高めることができる。
【0102】
また以上の実施形態では、移動端末30のアンテナ341から位置標定信号900を送信し、基地局20のアンテナ群25でこれを受信して、基地局20にて位置標定信号900が直接波であるか否かの判定や移動端末30の位置標定を行うようにしているが、位置標定信号900を基地局20から送信するようにし、移動端末30で位置標定信号900を受信して移動端末30にて位置標定信号900が直接波であるか否かの判定や自身の位置標定を行うようにしてもよい。また移動端末30にて標定した位置を示す情報を通信ネットワーク5や無線通信によりサーバ装置10や基地局20に送信するようにすれば、サーバ装置10や基地局20においても移動端末30の位置を取得することができる。
【0103】
またこの場合において、夫々の指向方向を変えた複数のアンテナ群25を設置し、各アンテナ群25から順に(例えば時分割で)位置標定信号900を送信するようにしてもよい。そのようにすれば移動端末30にて位置標定信号900を直接波として受信できる可能性が高まり、その結果、移動端末30の位置を正確に標定できる可能性を高めることができる。
【0104】
移動端末30は、例えば、アクティブ型もしくはパッシブ型のRFIDタグとして機能するものであってもよい。この場合、位置標定信号を、電磁誘導によってRFIDタグが備えるアンテナコイルから自発的にもしくは受動的に、基地局20に送信もしくは基地局20から受信するようにしてもよい。
【0105】
基地局20のアンテナ群25を屋内の構造物2に設ける際は、屋内に不感地帯ができない程度に広く、かつ、壁等からの反射波の影響が生じない程度に狭くなるように上記ビーム幅を適切に設定することが好ましい。
【符号の説明】
【0106】
1 位置標定システム
3 移動体
5 通信ネットワーク
10 サーバ装置
20 基地局
202 位置標定信号受信部
204 位置標定部
205 位置標定信号判定部
2051 第1位相差測定部
2052 第2位相差測定部
2053 直接波判定部
25 アンテナ群
251 アンテナ
251a 第1アンテナ
251b 第2アンテナ
251c 第3アンテナ
251d 第4アンテナ
30 移動端末
301 位置標定信号送信部
900 位置標定信号
341 アンテナ
S1300 位置標定処理
【特許請求の範囲】
【請求項1】
移動体に設けられる移動端末から、当該移動端末の位置を標定するための無線信号である位置標定信号を送信し、
基地局に、第1のアンテナ対と第2のアンテナ対とを、前記第1のアンテナ対の各アンテナによって受信される前記位置標定信号の経路差と前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の経路差とが一致するように設け、
前記基地局が、前記第1のアンテナ対の各アンテナ又は前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθに基づき前記移動端末が存在する方向を求め、求めた前記方向に基づき前記移動端末の位置を求める、
移動体の位置を標定する方法であって、
前記基地局が、
前記第1のアンテナ対により前記移動端末から送られてくる前記位置標定信号を受信し、前記第1のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθ1を測定し、
前記第2のアンテナ対により前記移動端末から送られてくる前記位置標定信号を受信し、前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθ2を測定し、
測定した前記位相差Δθ1と前記位相差Δθ2とに基づき、前記移動端末から受信した位置標定信号が直接波であるか否かを判定する
ことを特徴とする位置標定方法。
【請求項2】
請求項1に記載の位置標定方法であって、
前記基地局は、
前記移動端末の位置を、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果に対して符号が反転する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差を相殺すべく、前記位相差Δθ1と前記位相差Δθ2との差を取ることにより求め、
前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定は、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果と符号が一致する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、これにより測定された前記位相差Δθ1と前記位相差Δθ2との差を取ることにより行う
ことを特徴とする位置標定方法。
【請求項3】
請求項2に記載の位置標定方法であって、
前記基地局は、前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定を、前記差が0であるか否か、あるいは少なくとも予め設定された基準値以下であるか否かに基づき行う
ことを特徴とする位置標定方法。
【請求項4】
請求項1に記載の位置標定方法であって、
前記基地局は、
前記移動端末の位置を、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果に対して符号が反転する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差を相殺すべく、前記位相差Δθ1と前記位相差Δθ2との差を取ることにより求め、
前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定を、測定した前記位相差Δθ1と前記位相差Δθ2との和を取ることにより行う
ことを特徴とする位置標定方法。
【請求項5】
請求項4に記載の位置標定方法であって、
前記基地局は、前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定を、前記和と測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差の和とを比較することにより行う
ことを特徴とする位置標定方法。
【請求項6】
請求項1乃至5のいずれか一項に記載の位置標定方法であって、
前記基地局は、前記判定により前記位置標定信号が直接波であると判定した場合に、前記位相差Δθ1又は前記位相差Δθ2から求まる位置を前記移動端末の現在位置として取得する
ことを特徴とする位置標定方法。
【請求項7】
請求項1乃至6のいずれか一項に記載の位置標定方法であって、
前記第1のアンテナ対及び前記第2のアンテナ対を、前記第1のアンテナ対の各アンテナ及び前記第2のアンテナ対の各アンテナが等間隔を開けて平面上に正方形状に配置する
ことを特徴とする位置標定方法。
【請求項8】
移動体の位置を標定するシステムであって、
移動体に設けられた移動端末から送信される、前記移動端末の位置を標定するための無線信号である位置標定信号を受信する、第1のアンテナ対と第2のアンテナ対とを有し、
前記第1のアンテナ対と前記第2のアンテナ対は、前記第1のアンテナ対の各アンテナによって受信される前記位置標定信号の経路差と前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の経路差とが一致するように設けられ、
前記第1のアンテナ対の各アンテナ又は前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθに基づき前記移動端末が存在する方向を求め、求めた前記方向に基づき前記移動端末の位置を求める、位置標定部と、
前記第1のアンテナ対により前記移動端末から送られてくる前記位置標定信号を受信し、前記第1のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθ1を求める、第1位相差測定部と、
前記第2のアンテナ対により前記移動端末から送られてくる前記位置標定信号を受信し、前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθ2を求める、第2位相差測定部と、
求めた前記位相差Δθ1と前記位相差Δθ2とに基づき、前記移動端末から受信した位置標定信号が直接波であるか否かを判定する、直接波判定部と、
を備えることを特徴とする位置標定システム。
【請求項9】
請求項8に記載の位置標定システムであって、
前記位置標定部は、前記移動端末の位置を、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果に対して符号が反転する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差を相殺すべく、前記位相差Δθ1と前記位相差Δθ2との差を取ることにより求め、
前記直接波判定部は、前記移動端末から受信した位置標定信号が直接波であるか否かの前記判定を、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果と符号が一致する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、これにより測定された前記位相差Δθ1と前記位相差Δθ2との差を取ることにより行う
ことを特徴とする位置標定システム。
【請求項10】
請求項9に記載の位置標定システムであって、
前記直接波判定部は、前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定を、前記差が0であるか否か、あるいは少なくとも予め設定された基準値以下であるか否かに基づき行う
ことを特徴とする位置標定システム。
【請求項11】
請求項8に記載の位置標定システムであって、
前記位置標定部は、前記移動端末の位置を、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果に対して符号が反転する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差を相殺すべく、前記位相差Δθ1と前記位相差Δθ2との差を取ることにより求め、
前記直接波判定部は、前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定を、測定した前記位相差Δθ1と前記位相差Δθ2との和を取ることにより行う
ことを特徴とする位置標定システム。
【請求項12】
請求項11に記載の位置標定システムであって、
前記直接波判定部は、移動端末から受信した位置標定信号が直接波であるか否かの前記判定を、前記和と測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差の和とを比較することにより行う
ことを特徴とする位置標定システム。
【請求項13】
請求項8乃至12のいずれか一項に記載の位置標定システムであって、
前記位置標定部は、前記判定により前記位置標定信号が直接波であると判定した場合に、前記位相差Δθ1又は前記位相差Δθ2から求まる位置を前記移動端末の現在位置として取得する
ことを特徴とする位置標定システム。
【請求項14】
請求項8乃至13のいずれか一項に記載の位置標定システムであって、
前記第1のアンテナ対及び前記第2のアンテナ対は、前記第1のアンテナ対の各アンテナ及び前記第2のアンテナ対の各アンテナが等間隔を開けて平面上に正方形状に配置されるように設けられている
ことを特徴とする位置標定システム。
【請求項1】
移動体に設けられる移動端末から、当該移動端末の位置を標定するための無線信号である位置標定信号を送信し、
基地局に、第1のアンテナ対と第2のアンテナ対とを、前記第1のアンテナ対の各アンテナによって受信される前記位置標定信号の経路差と前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の経路差とが一致するように設け、
前記基地局が、前記第1のアンテナ対の各アンテナ又は前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθに基づき前記移動端末が存在する方向を求め、求めた前記方向に基づき前記移動端末の位置を求める、
移動体の位置を標定する方法であって、
前記基地局が、
前記第1のアンテナ対により前記移動端末から送られてくる前記位置標定信号を受信し、前記第1のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθ1を測定し、
前記第2のアンテナ対により前記移動端末から送られてくる前記位置標定信号を受信し、前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθ2を測定し、
測定した前記位相差Δθ1と前記位相差Δθ2とに基づき、前記移動端末から受信した位置標定信号が直接波であるか否かを判定する
ことを特徴とする位置標定方法。
【請求項2】
請求項1に記載の位置標定方法であって、
前記基地局は、
前記移動端末の位置を、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果に対して符号が反転する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差を相殺すべく、前記位相差Δθ1と前記位相差Δθ2との差を取ることにより求め、
前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定は、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果と符号が一致する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、これにより測定された前記位相差Δθ1と前記位相差Δθ2との差を取ることにより行う
ことを特徴とする位置標定方法。
【請求項3】
請求項2に記載の位置標定方法であって、
前記基地局は、前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定を、前記差が0であるか否か、あるいは少なくとも予め設定された基準値以下であるか否かに基づき行う
ことを特徴とする位置標定方法。
【請求項4】
請求項1に記載の位置標定方法であって、
前記基地局は、
前記移動端末の位置を、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果に対して符号が反転する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差を相殺すべく、前記位相差Δθ1と前記位相差Δθ2との差を取ることにより求め、
前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定を、測定した前記位相差Δθ1と前記位相差Δθ2との和を取ることにより行う
ことを特徴とする位置標定方法。
【請求項5】
請求項4に記載の位置標定方法であって、
前記基地局は、前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定を、前記和と測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差の和とを比較することにより行う
ことを特徴とする位置標定方法。
【請求項6】
請求項1乃至5のいずれか一項に記載の位置標定方法であって、
前記基地局は、前記判定により前記位置標定信号が直接波であると判定した場合に、前記位相差Δθ1又は前記位相差Δθ2から求まる位置を前記移動端末の現在位置として取得する
ことを特徴とする位置標定方法。
【請求項7】
請求項1乃至6のいずれか一項に記載の位置標定方法であって、
前記第1のアンテナ対及び前記第2のアンテナ対を、前記第1のアンテナ対の各アンテナ及び前記第2のアンテナ対の各アンテナが等間隔を開けて平面上に正方形状に配置する
ことを特徴とする位置標定方法。
【請求項8】
移動体の位置を標定するシステムであって、
移動体に設けられた移動端末から送信される、前記移動端末の位置を標定するための無線信号である位置標定信号を受信する、第1のアンテナ対と第2のアンテナ対とを有し、
前記第1のアンテナ対と前記第2のアンテナ対は、前記第1のアンテナ対の各アンテナによって受信される前記位置標定信号の経路差と前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の経路差とが一致するように設けられ、
前記第1のアンテナ対の各アンテナ又は前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθに基づき前記移動端末が存在する方向を求め、求めた前記方向に基づき前記移動端末の位置を求める、位置標定部と、
前記第1のアンテナ対により前記移動端末から送られてくる前記位置標定信号を受信し、前記第1のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθ1を求める、第1位相差測定部と、
前記第2のアンテナ対により前記移動端末から送られてくる前記位置標定信号を受信し、前記第2のアンテナ対の各アンテナによって受信される前記位置標定信号の位相差Δθ2を求める、第2位相差測定部と、
求めた前記位相差Δθ1と前記位相差Δθ2とに基づき、前記移動端末から受信した位置標定信号が直接波であるか否かを判定する、直接波判定部と、
を備えることを特徴とする位置標定システム。
【請求項9】
請求項8に記載の位置標定システムであって、
前記位置標定部は、前記移動端末の位置を、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果に対して符号が反転する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差を相殺すべく、前記位相差Δθ1と前記位相差Δθ2との差を取ることにより求め、
前記直接波判定部は、前記移動端末から受信した位置標定信号が直接波であるか否かの前記判定を、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果と符号が一致する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、これにより測定された前記位相差Δθ1と前記位相差Δθ2との差を取ることにより行う
ことを特徴とする位置標定システム。
【請求項10】
請求項9に記載の位置標定システムであって、
前記直接波判定部は、前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定を、前記差が0であるか否か、あるいは少なくとも予め設定された基準値以下であるか否かに基づき行う
ことを特徴とする位置標定システム。
【請求項11】
請求項8に記載の位置標定システムであって、
前記位置標定部は、前記移動端末の位置を、前記位相差Δθ2の測定結果が前記位相差Δθ1の測定結果に対して符号が反転する測定基準を用いて前記位相差Δθ1及び前記位相差Δθ2を測定し、測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差を相殺すべく、前記位相差Δθ1と前記位相差Δθ2との差を取ることにより求め、
前記直接波判定部は、前記移動端末から受信した前記位置標定信号が直接波であるか否かの前記判定を、測定した前記位相差Δθ1と前記位相差Δθ2との和を取ることにより行う
ことを特徴とする位置標定システム。
【請求項12】
請求項11に記載の位置標定システムであって、
前記直接波判定部は、移動端末から受信した位置標定信号が直接波であるか否かの前記判定を、前記和と測定した前記位相差Δθ1及び前記位相差Δθ2の夫々に含まれている誤差の和とを比較することにより行う
ことを特徴とする位置標定システム。
【請求項13】
請求項8乃至12のいずれか一項に記載の位置標定システムであって、
前記位置標定部は、前記判定により前記位置標定信号が直接波であると判定した場合に、前記位相差Δθ1又は前記位相差Δθ2から求まる位置を前記移動端末の現在位置として取得する
ことを特徴とする位置標定システム。
【請求項14】
請求項8乃至13のいずれか一項に記載の位置標定システムであって、
前記第1のアンテナ対及び前記第2のアンテナ対は、前記第1のアンテナ対の各アンテナ及び前記第2のアンテナ対の各アンテナが等間隔を開けて平面上に正方形状に配置されるように設けられている
ことを特徴とする位置標定システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−68463(P2013−68463A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−205962(P2011−205962)
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000211307)中国電力株式会社 (6,505)
【出願人】(395007299)有限会社アール・シー・エス (51)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000211307)中国電力株式会社 (6,505)
【出願人】(395007299)有限会社アール・シー・エス (51)
【Fターム(参考)】
[ Back to top ]