
位置標定装置、位置標定方法、位置標定プログラム、速度ベクトル算出装置、速度ベクトル算出方法および速度ベクトル算出プログラム
【課題】GPS衛星の不可視時に車両の位置を高い精度で標定できるようにすることを目的とする。
【解決手段】GPS可視時において、GPS処理部120は各GPS受信機の搬送波位相に基づいて二重位相差残差を算出する。カルマンフィルタ150は二重位相差残差を用いてIMU処理部140の誤差補正量を算出する。IMU処理部140は加速度ベクトルと角速度ベクトルとに基づいて位置、姿勢および速度ベクトルを算出し、誤差補正量で補正する。横滑り特性学習部110は標定された速度ベクトルに基づいて横滑り特性を学習する。GPS不可視時において、ODO処理部130は車速パルスと横滑り特性とに基づいて速度ベクトルを算出し、標定された速度ベクトルとの残差を算出する。カルマンフィルタ150は速度ベクトル残差を用いて誤差補正量を算出し、IMU処理部140は誤差補正量を用いて位置、姿勢および速度ベクトルを標定する。
【解決手段】GPS可視時において、GPS処理部120は各GPS受信機の搬送波位相に基づいて二重位相差残差を算出する。カルマンフィルタ150は二重位相差残差を用いてIMU処理部140の誤差補正量を算出する。IMU処理部140は加速度ベクトルと角速度ベクトルとに基づいて位置、姿勢および速度ベクトルを算出し、誤差補正量で補正する。横滑り特性学習部110は標定された速度ベクトルに基づいて横滑り特性を学習する。GPS不可視時において、ODO処理部130は車速パルスと横滑り特性とに基づいて速度ベクトルを算出し、標定された速度ベクトルとの残差を算出する。カルマンフィルタ150は速度ベクトル残差を用いて誤差補正量を算出し、IMU処理部140は誤差補正量を用いて位置、姿勢および速度ベクトルを標定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、GPS衛星(GPS:Global Positioning System)の不可視時に車両の位置を高い精度で標定するための位置標定装置、位置標定方法、位置標定プログラム、速度ベクトル算出装置、速度ベクトル算出方法および速度ベクトル算出プログラムに関するものである。
【背景技術】
【0002】
GPS/IMU(Inertial Measurement Unit)を用いて車両の位置を測位する測位装置において、GPS衛星の不可視時に測位精度を維持するために車速パルス(またはオドメトリ)を利用することがある。
このとき、車速パルスから得られる前後方向の車速が車両の進行方向の速度として扱われる。
【0003】
しかし、車両の向きを計測するジャイロには取り付け角度の誤差が生じるため、計測される車両の向きと実際の車両の向きとは一致しない。
さらに、車両がコーナーを曲がっているときには車両に横滑りが生じるため、車両の前後方向と車両の進行方向とは一致しない。
このため、車速パルスから得られる車速を車両の進行方向の速度として扱うと、実際の車両の進行方向の速度に対してジャイロの取り付け誤差と車両の横滑り誤差とが生じる。つまり、GPS衛星の不可視時に測位精度を維持することができなくなる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許3875714号公報
【特許文献2】特開2006−138834号公報
【特許文献3】特開2008−249639号公報
【非特許文献】
【0005】
【非特許文献1】山口裕之,浅野勝宏,天野也寸志,“車体横すべり角推定法の開発”,日本機械学會論文集C編67(659),pp.2291−2298,2001
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、例えば、GPS衛星の不可視時に車両の位置を高い精度で標定できるようにすることを目的とする。
【課題を解決するための手段】
【0007】
本発明の位置標定装置は、GPS衛星(GPS:Global Positioning System)から発信される搬送波を観測するGPS受信機と加速度ベクトルを検出する慣性装置と車速値を検出する車速検出装置とが設置された車両の座標値を標定する。
【0008】
位置標定装置は、前記慣性装置により検出された加速度ベクトルに基づいて車両の座標値と車両の速度ベクトルとを算出する慣性航法部と、
GPS衛星の可視時に前記GPS受信機により取得された観測値に基づいて所定の情報を観測情報として生成する観測情報生成部と、
前記観測情報生成部により生成された観測情報を用いて前記慣性航法部の算出誤差の補正量をGPS可視時補正量として算出するカルマンフィルタと、
前記慣性航法部により算出された車両の座標値と車両の速度ベクトルとを前記カルマンフィルタにより算出されたGPS可視時補正量により補正する航法補正部と、
前記車速検出装置により検出された車速値に基づいて車両の速度スカラーを算出する速度スカラー算出部と、
GPS衛星の可視時に前記速度スカラー算出部により算出された速度スカラーと前記航法補正部により補正された速度ベクトルの左右方向成分とに基づいて車両の横滑り角を算出する横滑り角算出部と、
前記横滑り角算出部により算出された横滑り角と前記慣性装置により検出された加速度ベクトルの左右方向成分とを対応づけて蓄積する横滑り角蓄積部と、
前記横滑り角蓄積部に蓄積された横滑り角に基づいて車両の加速度ベクトルの左右方向成分と横滑り角との関係値をコーナリングパワーとして算出するコーナリングパワー算出部と、
GPS衛星が不可視であるGPS不可視時点に前記速度スカラー算出部により算出された速度スカラーと前記慣性装置により前記GPS不可視時点に検出された加速度ベクトルの左右方向成分と前記コーナリングパワー算出部により算出されたコーナリングパワーとに基づいて車両の速度ベクトルを算出する速度ベクトル算出部と、
前記慣性航法部により前記GPS不可視時点に算出された速度ベクトルと前記速度ベクトル算出部により算出された速度ベクトルとの差を速度ベクトル残差として算出する速度ベクトル残差算出部とを備え、
前記カルマンフィルタは、前記速度ベクトル残差算出部により算出された速度ベクトル残差を用いて前記慣性航法部の算出誤差の補正量をGPS不可視時補正量として算出し、
前記航法補正部は、GPS衛星の可視時に前記慣性航法部により算出された車両の座標値を前記GPS可視時補正量により補正することにより車両の座標値を標定し、GPS衛星の不可視時に前記慣性航法部により算出された車両の座標値を前記GPS不可視時補正量により補正することにより車両の座標値を標定する。
【発明の効果】
【0009】
本発明によれば、例えば、GPS衛星の不可視時に車両の位置を高い精度で標定することができる。
【図面の簡単な説明】
【0010】
【図1】実施の形態1における車両200の構成図。
【図2】実施の形態1における自己位置姿勢標定装置100の機能構成図。
【図3】実施の形態1におけるODO処理部130およびIMU処理部140の機能構成図。
【図4】実施の形態1における横滑り角βを示す図。
【図5】実施の形態1における車両座標系xyzと慣性装置220のオフセットOSとの関係図。
【図6】実施の形態1におけるコーナリングパワーSslipとオフセットos[1]とを表すグラフ。
【図7】実施の形態1におけるGPS処理部120の機能構成図。
【図8】実施の形態1における自己位置姿勢標定方法を示すフローチャート。
【図9】実施の形態1におけるGPS/INS複合航法処理(S130)のフローチャート。
【図10】実施の形態1における横滑り特性学習処理(S140)のフローチャート。
【図11】実施の形態1におけるODO/INS複合航法処理(S150)のフローチャート。
【図12】実施の形態1における自己位置姿勢標定装置100の標定精度を示すグラフ。
【図13】実施の形態1における自己位置姿勢標定装置100のハードウェア資源の一例を示す図。
【発明を実施するための形態】
【0011】
実施の形態1.
GPS衛星の可視時にGPS/INS(Inertial Navigation System)複合航法により車両の位置を標定し、GPS衛星の不可視時にODO(ODOmetry)/INS複合航法により車両の位置を標定する標定装置について説明する。
標定装置は、GPS衛星の可視時にGPS/INS複合航法により得られる車両の速度ベクトルに基づいて車両の横滑り特性を学習し、GPS衛星の不可視時に車両の横滑り特性を考慮してODO/INS複合航法により車両の位置を標定する。
【0012】
図1は、実施の形態1における車両200の構成図である。
実施の形態1における車両200の構成について、図1に基づいて以下に説明する。
【0013】
車両200には天板201が設置され、天板201には3台のGPS受信機と慣性装置220とが取り付けられている。
車両200は自己位置姿勢標定装置100および車速検出装置230を備える。
【0014】
天板201の3台のGPS受信機のうち1台を主局のGPS受信機とし、残りの2台を従局のGPS受信機とする。以下、主局のGPS受信機を「主局GPS210」といい、従局のGPS受信機を「従局GPS(211、212)」という。
各GPS受信機は、GPS衛星から定期的に発信されるGPSの測位信号を受信し、受信結果から特定の観測値を取得し、取得した観測値を出力する。以下、GPS受信機がGPSの測位信号を受信して観測値を得ることを「観測」という。また、GPSの測位信号を「搬送波」という。搬送波にはエフェメリスなどの航法メッセージが含まれる。
GPS受信機が出力する観測値には、受信した搬送波の位相(搬送波位相)、GPS受信機とGPS衛星との距離(疑似距離)、GPS受信機の座標値、航法メッセージなどがある。
【0015】
慣性装置220(IMU)は、ジャイロセンサと加速度センサとを備える。
ジャイロセンサは、周期的に、車両200の3軸(x,y,z)方向の角速度を検出して出力する。以下、3軸方向の角速度を「角速度ベクトル」という。
加速度センサは、周期的に、車両200の3軸方向の加速度を検出して出力する。以下、3軸方向の加速度を「加速度ベクトル」という。
【0016】
以下、車両200の前後方向(縦、長さ方向)を「x軸」、車両200の左右方向(横、幅方向)を「y軸」、車両200の上下方向(高さ方向)を「z軸」とする。
x軸回りの角度を「ロール角φ(回転角)」、y軸回りの角度を「ピッチ角θ(仰角)」、z軸回りの角度を「ヨー角ψ(方位角)」という。
xyz軸で表される座標系(原点O)を「車両座標系」とする。
【0017】
ジャイロセンサと加速度センサには多少の取り付け誤差が生じる。このため、ジャイロセンサにより検出された角速度ベクトルと加速度センサにより検出された加速度ベクトルは車両座標系に対して正確な値ではない。
【0018】
車速検出装置230(ODO)は、周期的に、車両200の速度に相当する車速値(例えば、車速パルス、オドメトリ値)を検出して出力する。以下、車速検出装置230は車速値として車速パルスを検出するものとする。車速パルスは単位時間当たりのタイヤの回転数を表す。車速パルスにタイヤの円周の長さを掛けることにより車両200の速度(スカラー量)が求まる。
以下、車速検出装置230により検出された車速パルスから求まる速度を「速度スカラー」という。
【0019】
自己位置姿勢標定装置100は、各GPS受信機の観測値と慣性装置220の検出値(角速度ベクトル、加速度ベクトル)と車速検出装置230の検出値(車速パルス)とに基づいて車両200の位置(座標値)、姿勢(姿勢角、向き)および速度ベクトルを標定する。
【0020】
例えば、位置とは(緯度、経度、高度)であり、姿勢とは(ロール角、ピッチ角、ヨー角)である。
速度ベクトルは速度を3軸成分に分けて表すデータである。
【0021】
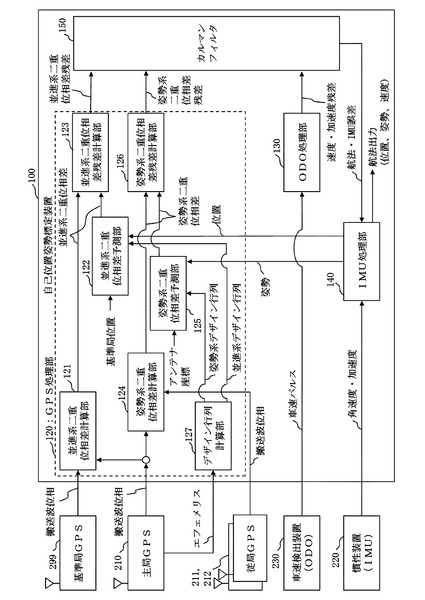
図2は、実施の形態1における自己位置姿勢標定装置100の機能構成図である。
実施の形態1における自己位置姿勢標定装置100の機能構成について、図2に基づいて以下に説明する。
【0022】
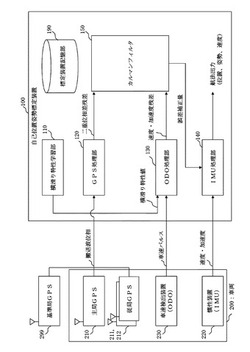
自己位置姿勢標定装置100は、横滑り特性学習部110、GPS処理部120、ODO処理部130、IMU処理部140、カルマンフィルタ150および標定装置記憶部190を備える。
【0023】
GPS処理部120は、車両200に設置された主局GPS210、従局GPS211および従局GPS212それぞれが観測した搬送波位相と基準局GPS299が観測した搬送波位相とに基づいて二重位相差残差を算出する。
基準局GPS299とは、位置が固定であり座標値が既知であるGPS受信機(電子基準点ともいう)である。
各GPS受信機からGPS衛星が可視であるときに、各GPS受信機により搬送波位相が観測される。
以下、各GPS受信機から所定数以上のGPS衛星が可視であるときを「GPS可視時」といい、各GPS受信機から所定数以上のGPS衛星が可視でないとき(不可視であるとき)を「GPS不可視時」という。
【0024】
カルマンフィルタ150は、GPS処理部120により算出される二重位相差残差、またはODO処理部130により算出される速度残差を用いて、IMU処理部140の算出値(車両200の位置、姿勢および速度ベクトル)の誤差の補正量を算出する。
【0025】
IMU処理部140は、車両200に設置された慣性装置220により検出された加速度ベクトルおよび角速度ベクトルに基づいて車両200の位置、姿勢および速度ベクトルを慣性航法(INS)により算出する。
IMU処理部140は、算出した位置、姿勢および速度ベクトルをカルマンフィルタ150により算出された誤差補正量を用いて補正し、補正後の位置、姿勢および速度を出力する。
以下、車両200の位置、姿勢および速度ベクトルを算出し、補正することを「標定」という。
また、標定された位置、姿勢および速度ベクトルを出力することを「航法出力」という。
【0026】
横滑り特性学習部110は、GPS可視時にIMU処理部140により標定された車両200の速度ベクトルに基づいて、車両200に生じる横滑りの特性を学習する。
【0027】
ODO処理部130は、GPS不可視時に車速検出装置230により検出された車速パルスと横滑り特性学習部110により学習された横滑りの特性とに基づいて、車両200の速度ベクトルを算出する。
ODO処理部130は、自己が算出した速度ベクトルとIMU処理部140により標定された速度ベクトルとの誤差(速度残差)を算出する。
【0028】
標定装置記憶部190は、自己位置姿勢標定装置100が使用するデータを記憶する。各「〜部」およびカルマンフィルタ150の入力データ、算出データおよび出力データは標定装置記憶部190に記憶される。
各GPS受信機により観測された搬送波位相、車速検出装置230により検出された車速パルス、慣性装置220により検出された加速度ベクトルおよび角速度ベクトル、横滑り特性学習部110により学習された横滑りの特性値、IMU処理部140の航法出力値は標定装置記憶部190に記憶されるデータの一例である。
【0029】
図3は、実施の形態1におけるODO処理部130およびIMU処理部140の機能構成図である。
実施の形態1におけるODO処理部130およびIMU処理部140の機能構成について、図3に基づいて以下に説明する。
【0030】
ODO処理部130は、速度/加速度計算部131(速度スカラー算出部の一例)、速度/加速度予測部132([第2の]速度ベクトル算出部の一例)および速度/加速度残差計算部133(速度ベクトル残差算出部の一例)を備える。
【0031】
IMU処理部140は、補正計算部141(慣性誤差補正部の一例)とストラップダウン演算部142(慣性航法部、航法補正部、第1の速度ベクトル算出部の一例)とを備える。
【0032】
GPS可視時において、自己位置姿勢標定装置100の各構成は以下のように機能する。
【0033】
GPS処理部120(観測情報生成部の一例)は、各GPS受信機により観測された搬送波位相(観測値の一例)に基づいて二重位相差残差(搬送波位相の二重差の残差)(観測情報の一例)を算出する。
【0034】
カルマンフィルタ150は、GPS処理部120により算出された二重位相差残差を用いて、慣性装置220の検出誤差の補正量とストラップダウン演算部142の演算誤差の補正量とを算出する。
以下、慣性装置220の検出誤差の補正量を「IMU誤差補正量(慣性誤差補正量の一例)」といい、ストラップダウン演算部142の演算誤差の補正量を「航法誤差補正量(GPS可視時補正量の一例)」という。
IMU誤差補正量には、慣性装置220により検出された角速度ベクトルと加速度ベクトルとのそれぞれの誤差を補正する値が含まれる。
航法誤差補正量には、ストラップダウン演算部142により算出された車両200の位置、姿勢および速度ベクトルそれぞれの誤差を補正する値が含まれる。
【0035】
補正計算部141は、慣性装置220から新たに出力された角速度ベクトルおよび加速度ベクトルをカルマンフィルタ150により新たに算出されたIMU誤差補正量で補正する。このとき、補正計算部141は、角速度ベクトルに角速度ベクトルに対する補正量を加算(または減算)し、加速度ベクトルに加速度ベクトルに対する補正量を加算する。
【0036】
ストラップダウン演算部142は、補正計算部141により補正された角速度ベクトルおよび加速度ベクトルを用いてストラップダウン演算を行う。ストラップダウン演算において、ストラップダウン演算部142は、角速度ベクトルを積分して姿勢(角度ベクトル)を算出し、加速度ベクトルを積分して速度ベクトルを算出する。さらに、ストラップダウン演算部142は、速度ベクトルを積分して距離ベクトルを算出し、前回の位置に距離ベクトルを加算して現在の位置を算出する。
ストラップダウン演算部142は、ストラップダウン演算により得られた車両200の位置、姿勢および速度ベクトルをカルマンフィルタ150により新たに算出された航法誤差補正量で補正する。このとき、ストラップダウン演算部142は、車両200の位置、姿勢および速度ベクトルにそれぞれの補正量を加算する。
ストラップダウン演算部142は、標定(算出および補正)した車両200の位置、姿勢および速度ベクトルを出力する。
【0037】
速度/加速度計算部131は、車速検出装置230から出力された車速パルスにタイヤの円周の長さを掛けて車両200の速度スカラーを算出する。
速度/加速度計算部131は、算出した速度スカラーを微分して車両200の加速度(スカラー量)を算出する。
【0038】
横滑り特性学習部110(横滑り角算出部の一例)は、速度/加速度計算部131により算出された速度スカラーを速度ベクトルの前後方向成分(x軸成分)として扱い、ストラップダウン演算部142により標定された速度ベクトルの左右方向成分値(y軸成分)を速度スカラーで割った値を横滑り角として算出する。
すなわち、「横滑り角β=速度ベクトルの左右方向成分値Vy/速度スカラーVodo」である。「Vy/Vodo」をタンジェント(tan)の値とする角度を横滑り角βとしてもよい。
ここで、速度スカラーと速度ベクトルとは同期が取られているものとする。つまり、速度スカラーと速度ベクトルとは同時刻に取得された元データ(速度パルス、加速度ベクトル)から算出されたもの、または同時刻に取得されたように加工した元データから算出されたものである。
【0039】
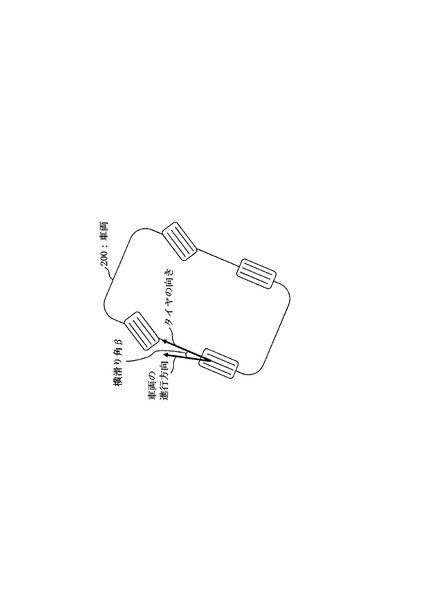
図4は、実施の形態1における横滑り角βを示す図である。
図4において、車両200がコーナーを曲がっているとき(車両にヨーレートがあるとき)、車両200は横力を受けてタイヤの傾きよりも浅い角度の方向へ進む。つまり、車両200はコーナリング時に横滑りし、横滑り角βが生じる。このとき、タイヤの向きと車両200の進行方向とが成すヨー角が横滑り角βである。
横滑り特性学習部110は、この横滑り角βを上記のように算出する。
【0040】
図3に戻り、横滑り特性学習部110の説明を続ける。
【0041】
横滑り特性学習部110は、算出した横滑り角と補正計算部141により補正された加速度ベクトルの左右方向成分値(y軸成分)とを対応づけて標定装置記憶部190(横滑り角蓄積部の一例)に記憶する。標定装置記憶部190には、GPS可視時の間に得られた多数の横滑り角と加速度ベクトルの左右方向成分値とが蓄積される。
【0042】
横滑り特性学習部110(コーナリングパワー算出部の一例)は、蓄積された横滑り角と加速度ベクトルの左右方向成分値とに基づいて、車両200に掛かるコーナリングパワーと慣性装置220のオフセット(取り付け誤差分のずれ量)とを算出する。
【0043】
例えば、横滑り特性学習部110は、以下のようなタイミングでコーナリングパワーとオフセットとを算出し直して更新する。
・定期的または新たな横滑り角と加速度ベクトルの左右方向成分値とが蓄積されたとき。
・GPS不可視時になったとき(各GPS受信機から搬送波位相が入力されなくなったとき)。
【0044】
コーナリングパワーとは、単位コーナリングフォース当たりの横滑り角、すなわち、単位コーナリングフォースに対する横滑り角の変化率のことである。
コーナリングフォースとは加速度ベクトルの左右方向成分値に質量(ここでは車両200の重量)を掛けた値であり、単位コーナリングフォースとは単位質量当たりのコーナリングフォースである。
すなわち、コーナリングフォースとは、加速度ベクトルの左右方向成分値である。
【0045】
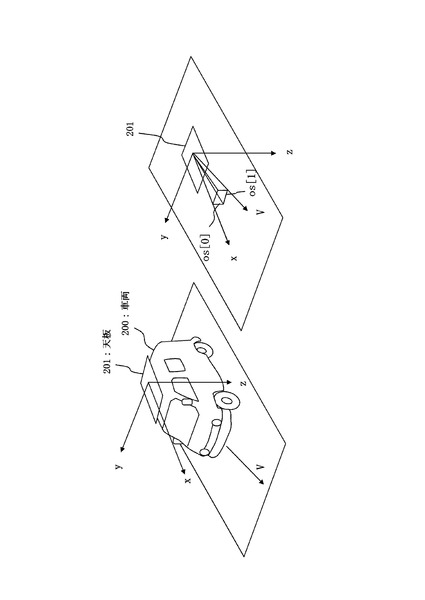
図5は、実施の形態1における車両座標系xyzと慣性装置220のオフセットOSとの関係図である。
実施の形態1における慣性装置220のオフセットOSについて、図5に基づいて以下に説明する。
【0046】
慣性装置220には車両座標系(xyz)に対して取り付け誤差(オフセット)が生じる。
このため、慣性装置220は、車両200がx軸方向へ進んでいても、車両200がx軸方向からずれたV方向へ進んでいるような角速度ベクトルと加速度ベクトルとを検出する。
以下、慣性装置220のz軸方向(ピッチ角)のオフセットを「os[0]」と記し、慣性装置220のy軸方向(ヨー角)のオフセットを「os[1]」と記す。
【0047】
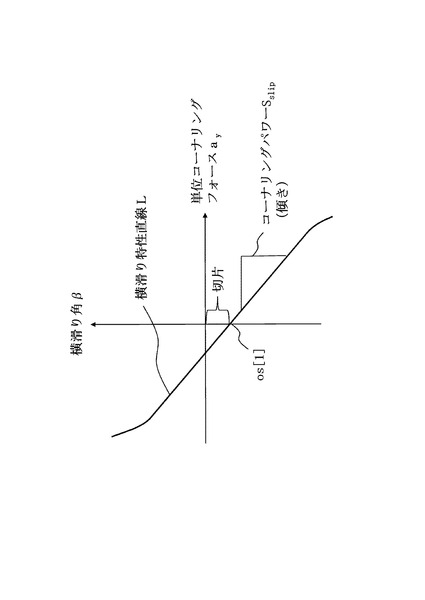
図6は、実施の形態1におけるコーナリングパワーSslipとオフセットos[1]とを表すグラフである。
実施の形態1におけるコーナリングパワーSslipとオフセットos[1]とを表すグラフについて、図6に基づいて以下に説明する。
【0048】
横滑り特性学習部110は、横軸に単位コーナリングフォースay(加速度ベクトルの左右方向成分)、縦軸に横滑り角βをとり、蓄積された各横滑り角と加速度ベクトルの左右方向成分値とに対応する点をプロットする(図示省略)。
横滑り特性学習部110は、プロットされた各点の平均をとって横滑り特性直線L(一次回帰直線)を算出する。
【0049】
横滑り特性直線Lは、単位コーナリングフォースayの特定範囲内と単位コーナリングフォースayの特定範囲外とで傾きが異なる。
つまり、車両200に掛かる単位コーナリングフォースayが特定範囲内の大きさであるとき、車両200には単位コーナリングフォースayに比例した横滑り角βが生じる。しかし、車両200に掛かる単位コーナリングフォースayが特定範囲を超えた大きさになると、車両200に生じる横滑り角βは増大する。
【0050】
横滑り特性学習部110は、横滑り特性直線Lの傾きをコーナリングパワーSslipとして算出し、横滑り特性直線Lの切片(単位コーナリングフォースayが「0」のときの横滑り角β)をオフセットos[1]として算出する。
【0051】
横滑り特性学習部110は、オフセットos[1]と同様に、オフセットos[0]を算出する。
例えば、横滑り特性学習部110は、ストラップダウン演算部142により標定された速度ベクトルの上下方向成分値を速度スカラーで割った値をオフセット角として算出し、オフセット角と慣性装置220により検出された加速度ベクトルの上下方向成分値とを対応づけて蓄積する。横滑り特性学習部110は、オフセット角と加速度ベクトルの上下方向成分値とに対応する点をプロットし、各点の平均をとった直線の切片をオフセットos[0]として算出する。
【0052】
オフセットos[0][1]を測量等により予め特定しておいても構わない。
【0053】
図3に戻り、自己位置姿勢標定装置100の説明を続ける。
【0054】
GPS不可視時において、自己位置姿勢標定装置100の各構成は以下のように機能する。
【0055】
GPS可視時と同様に、速度/加速度計算部131は速度スカラーと加速度スカラーを算出し、補正計算部141は角速度ベクトルと加速度ベクトルとを補正し、ストラップダウン演算部142は位置、姿勢および速度ベクトルを標定する。
【0056】
速度/加速度予測部132は、速度/加速度計算部131により算出された速度スカラーと横滑り特性学習部110により算出されたコーナリングパワーと横滑り特性学習部110により算出されたオフセットと補正計算部141により補正された加速度ベクトルの左右方向成分値とに基づいて、車両200の速度ベクトルを算出する。
ここで、速度スカラーと加速度ベクトルとは同期が取られているものとする。
【0057】
車両200の速度ベクトルVbの算出式(1)を以下に示す。式(1)において、「Vodo」は速度スカラー、「os[0]」はピッチ角オフセット、「os[1]」はヨー角オフセット、「Sslip」はコーナリングパワー、「ay」は単位コーナリングフォース(加速度ベクトルの左右方向成分値)を示す。
【0058】
【数1】

【0059】
速度/加速度予測部132は、式(1)の速度スカラーVodoを加速度スカラーに置き換えて加速度ベクトルを算出する。
【0060】
速度/加速度残差計算部133は、速度/加速度予測部132により算出された速度ベクトルとストラップダウン演算部142により標定された速度ベクトルとの差を「速度ベクトル残差」として算出する。
速度/加速度残差計算部133は、速度/加速度予測部132により算出された加速度ベクトルと補正計算部141により補正された加速度ベクトルとの差を「加速度ベクトル残差」として算出する。
ここで、2つの速度ベクトルおよび2つの加速度ベクトルは同期が取られているものとする。
【0061】
カルマンフィルタ150は、速度/加速度残差計算部133により算出された速度ベクトル残差と加速度ベクトル残差とを用いて、IMU誤差補正量と航法誤差補正量とを算出する。
【0062】
補正計算部141は、慣性装置220から新たに出力された角速度ベクトルと加速度ベクトルをカルマンフィルタ150により新たに算出されたIMU誤差補正量で補正する。
ストラップダウン演算部142は、補正計算部141により補正された角速度ベクトルと加速度ベクトルとに基づいて車両200の位置、姿勢および速度ベクトルを算出し、算出した位置、姿勢および速度ベクトルをカルマンフィルタ150により新たに算出された航法誤差補正量で補正する。
ストラップダウン演算部142は、標定(算出および補正)した車両200の位置、姿勢および速度ベクトルを出力する。
【0063】
図7は、実施の形態1におけるGPS処理部120の機能構成図である。
実施の形態1におけるGPS処理部120の機能構成について、図7に基づいて以下に説明する。
【0064】
GPS処理部120は、並進系二重位相差計算部121、並進系二重位相差予測部122、並進系二重位相差残差計算部123、姿勢系二重位相差計算部124、姿勢系二重位相差予測部125、姿勢系二重位相差残差計算部126およびデザイン行列計算部127を備える。
【0065】
GPS処理部120の各構成は、GPS可視時に以下のように機能する。
【0066】
並進系二重位相差計算部121は、基準局GPS299と主局GPS210とのそれぞれからGPS衛星Aの搬送波位相とGPS衛星Bの搬送波位相とを入力する。
並進系二重位相差計算部121は、基準局GPS299から入力したGPS衛星Aの搬送波位相と主局GPS210から入力したGPS衛星Aの搬送波位相との差をGPS衛星Aの搬送波位相差として算出する。並進系二重位相差計算部121は、GPS衛星Bについても同様に搬送波位相差を算出する。
並進系二重位相差計算部121は、GPS衛星Aの搬送波位相差とGPS衛星Bの搬送波位相差との差を「並進系二重位相差」として算出する。基準局GPS299と主局GPS210との距離から車両200の位置が定まるため、基準局GPS299と主局GPS210との観測値から求まる観測情報(ここでは、二重位相差)を「並進系」とする。
【0067】
並進系二重位相差予測部122は、基準局GPS299の位置とIMU処理部140により標定された車両200の位置(主局GPS210の位置に相当する)とを入力し、デザイン行列計算部127により算出される並進系デザイン行列に基づいて並進系二重位相差を算出する。
並進系デザイン行列とは、2つのGPS受信機の位置と並進系二重位相差との関係を表す所定の行列である。
【0068】
並進系二重位相差残差計算部123は、並進系二重位相差計算部121により算出された並進系二重位相差と並進系二重位相差予測部122により算出された並進系二重位相差との差を「並進系二重位相差残差」として算出する。
【0069】
姿勢系二重位相差計算部124は、主局GPS210、従局GPS211および従局GPS212のそれぞれからGPS衛星Aの搬送波位相とGPS衛星Bの搬送波位相とを入力する。
姿勢系二重位相差計算部124は、主局GPS210から入力したGPS衛星Aの搬送波位相と従局GPS211から入力したGPS衛星Aの搬送波位相との差をGPS衛星Aの搬送波位相差として算出する。姿勢系二重位相差計算部124は、GPS衛星Bについても同様に搬送波位相差を算出する。
姿勢系二重位相差計算部124は、GPS衛星Aの搬送波位相差とGPS衛星Bの搬送波位相差との差を主局GPS210と従局GPS211とに対する「姿勢系二重位相差」として算出する。主局GPS210と従局GPS211(または従局GPS212)とを結ぶ基線ベクトルは車両200の姿勢を表すため、主局GPS210と従局GPS211(または従局GPS212)との観測値から求まる観測情報(ここでは、二重位相差)を「姿勢系」とする。
姿勢系二重位相差計算部124は、主局GPS210と従局GPS212とに対しても同様に姿勢系二重位相差を算出する。
【0070】
姿勢系二重位相差予測部125は、主局GPS210、従局GPS211および従局GPS212の相対位置「アンテナ座標」(天板201上の2次元の座標値)とIMU処理部140により標定された車両200の姿勢とを入力する。姿勢系二重位相差予測部125は、デザイン行列計算部127により算出される姿勢系デザイン行列に基づいて主局GPS210と従局GPS211とに対する姿勢系二重位相差と主局GPS210と従局GPS212とに対する姿勢系二重位相差とを算出する。
姿勢系デザイン行列とは、2つのGPS受信機の位置と姿勢系二重位相差との関係を表す所定の行列である。主局GPS210、従局GPS211および従局GPS212の相対位置と車両200の姿勢とにより3つのGPS受信機の3次元の相対位置が求まる。
【0071】
姿勢系二重位相差残差計算部126は、姿勢系二重位相差計算部124により算出された主局GPS210と従局GPS211とに対する姿勢系二重位相差と姿勢系二重位相差予測部125により算出された主局GPS210と従局GPS211とに対する姿勢系二重位相差との差を主局GPS210と従局GPS211とに対する「姿勢系二重位相差残差」として算出する。
姿勢系二重位相差残差計算部126は、主局GPS210と従局GPS212とに対しても同様に姿勢系二重位相差残差を算出する。
【0072】
デザイン行列計算部127は、主局GPS210から出力された航法メッセージ(エフェメリス)に基づいて現在のGPS衛星の位置に対応する姿勢系デザイン行列と並進系デザイン行列とを算出する。エフェメリスは各GPS衛星の軌道を示す情報であり、エフェメリスから各GPS衛星の位置が求まる。
【0073】
カルマンフィルタ150は、並進系二重位相差残差計算部123により算出された並進系二重位相差残差と姿勢系二重位相差残差計算部126により算出された2つの姿勢系二重位相差残差とを用いて、IMU誤差補正量と航法誤差補正量とを算出する。
【0074】
IMU処理部140は、カルマンフィルタ150により算出されたIMU誤差補正量と航法誤差補正量とを用いて車両200の位置、姿勢および速度ベクトルを標定する。
【0075】
次に、カルマンフィルタ150の概要について説明する。
カルマンフィルタ150は、モデル化された状態方程式と観測方程式とを用いて航法誤差補正量およびIMU誤差補正量を推定する。カルマンフィルタ150に入力される残差は観測方程式の変数として用いられる。
【0076】
誤差補正量の推定演算では、観測ノイズ行列R、誤差共分散行列Pおよび観測行列Hを用いてカルマンゲインベクトルKが算出される。観測ノイズ行列Rと観測行列Hは残差の種類ごとに用意される。
【0077】
速度残差に対する観測ノイズ行列Rbを式(2)に示す。式(2)において「varVP」「Kx」「Ka」はそれぞれ所定の係数を示す。「Vodo」は速度スカラーを示し、「ay」は単位コーナリングフォースを示す。
【0078】
【数2】
【0079】
速度残差に対する観測ノイズ行列Rbは以下のような特徴を有する。なお、観測ノイズ行列Rbの各行はそれぞれx軸、y軸、z軸に対応する。
・xyz軸で値が異なる。
・単位コーナリングフォースayの大きさによってy軸の値が変化する。
・速度スカラーVodoの大きさによってxyz軸の値が変化する。
【0080】
誤差共分散行列Pは、状態量(位置、姿勢、速度ベクトル、航法誤差補正量、IMU誤差補正量など)の共分散値を表す。
【0081】
観測行列Hは、状態量と観測量(並進系(姿勢系)二重位相差残差、速度ベクトル残差、加速度ベクトル残差など)との関係を表す。
【0082】
カルマンゲインベクトルKの算出式(3)を以下に示す。式(3)において「HT」は観測行列Hの転置行列を表す。
【0083】
【数3】
【0084】
残差dzにカルマンゲインベクトルKを掛けて求まる複数の値(Kdz)が、航法誤差補正量およびIMU誤差補正量となる。
【0085】
主に、並進系二重位相差残差に応じて位置の誤差補正量が定まり、姿勢系二重位相差残差に応じて姿勢の誤差補正量が定まる。また、速度ベクトル残差に応じて速度の誤差補正量が定まり、加速度ベクトル残差に応じて姿勢(ロール角、ピッチ角)の誤差補正量が定まる。
【0086】
次に、自己位置姿勢標定装置100の処理の流れについてまとめる。
【0087】
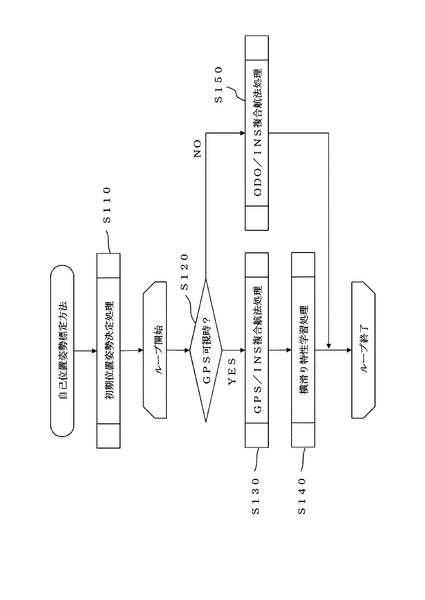
図8は、実施の形態1における自己位置姿勢標定方法を示すフローチャートである。
実施の形態1における自己位置姿勢標定方法の処理の流れについて、図8に基づいて以下に説明する。
【0088】
自己位置姿勢標定装置100は、以下に説明する処理をCPU(Central Processing Unit)を用いて実行する。
【0089】
初期位置姿勢決定処理(S110)において、自己位置姿勢標定装置100は所定の方法により車両200の位置、姿勢の初期値を決定する。
例えば、自己位置姿勢標定装置100(図示省略する初期値決定部)は、各GPS受信機(299、210〜212)を用いてリアルタイムキネマティックGPS(RTK−GPS)により車両200の位置を測位する。そして、自己位置姿勢標定装置100は、車両200の3つのGPS受信機(210〜212)の位置関係に基づいて車両200の姿勢を算出する(GPSコンパス)。RTK−GPSの測位精度は高く、その誤差は2センチメートル程度である。但し、RTK−GPS以外の方法で位置を測位しても構わない。また、利用者が測量などにより得られた位置、姿勢を自己位置姿勢標定装置100に設定しても構わない。
初期位置姿勢決定処理(S110)の後、自己位置姿勢標定装置100は以下のように動作する。
【0090】
GPS可視時(S120「YES」)、自己位置姿勢標定装置100は、GPS/INS複合航法処理(S130)により車両200の位置、姿勢および速度ベクトルを標定し、横滑り特性学習処理(S140)により車両200の横滑り特性を学習する。
【0091】
GPS不可視時(S120「NO」)、自己位置姿勢標定装置100は、ODO/INS複合航法処理(S150)により車両200の横滑り特性に基づいて車両200の位置、姿勢および速度ベクトルを標定する。
【0092】
自己位置姿勢標定装置100は、S120〜S150を繰り返し実行する。
【0093】
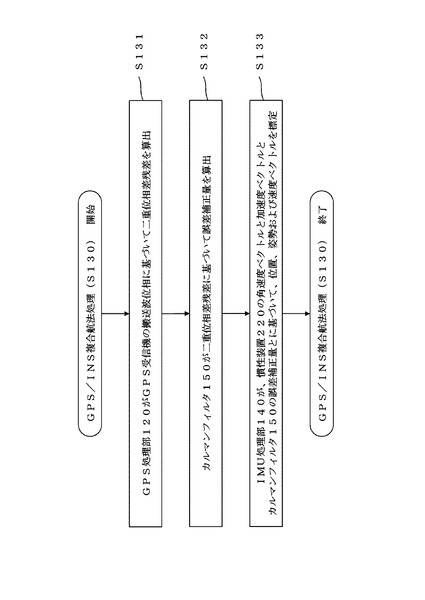
図9は、実施の形態1におけるGPS/INS複合航法処理(S130)のフローチャートである。
実施の形態1におけるGPS/INS複合航法処理(S130)について、図9に基づいて以下に説明する。
【0094】
S131において、GPS処理部120は、各GPS受信機により観測された搬送波位相に基づいて並進系二重位相差残差と姿勢系二重位相差残差とを算出する。
【0095】
S132において、カルマンフィルタ150は、並進系二重位相差残差と姿勢系二重位相差残差とに基づいて航法誤差補正量とIMU誤差補正量とを算出する。
【0096】
S133において、補正計算部141は、慣性装置220により検出された角速度ベクトルと加速度ベクトルとをカルマンフィルタ150により算出されたIMU誤差補正量で補正する。
また、ストラップダウン演算部142は、補正計算部141により補正された角速度ベクトルと加速度ベクトルとに基づいて車両200の位置、姿勢および速度ベクトルを算出する。
そして、ストラップダウン演算部142は、カルマンフィルタ150により算出された航法誤差補正量で補正して車両200の位置、姿勢および速度ベクトルを標定する。
【0097】
図10は、実施の形態1における横滑り特性学習処理(S140)のフローチャートである。
実施の形態1における横滑り特性学習処理(S140)について、図10に基づいて以下に説明する。
【0098】
S141において、速度/加速度計算部131は、車速検出装置230により検出された車速パルスに基づいて速度スカラーを算出する。
【0099】
S142において、横滑り特性学習部110は、速度/加速度計算部131により算出された速度スカラーとストラップダウン演算部142により標定された速度ベクトルの左右方向成分値とに基づいて車両200の横滑り角を算出する。
【0100】
S143において、横滑り特性学習部110は、算出した横滑り角と補正計算部141により補正された加速度ベクトルの左右方向成分(単位コーナリングフォース)とを対応づけて蓄積する。
【0101】
S144において、横滑り特性学習部110は、蓄積された横滑り角に基づいて横滑り特性直線を算出する。
【0102】
S145において、横滑り特性学習部110は、横滑り特性直線に基づいて車両200のコーナリングパワーと慣性装置220のオフセットとを算出する。
【0103】
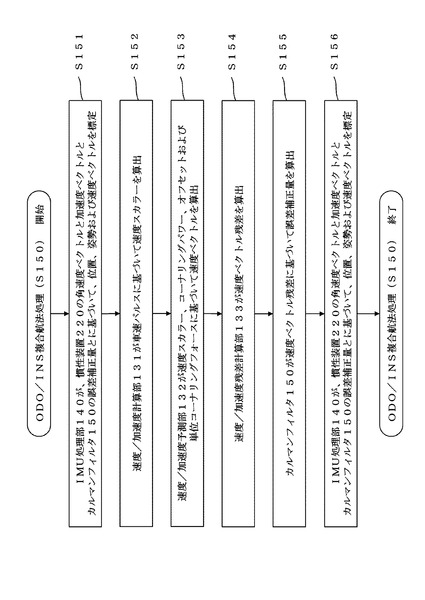
図11は、実施の形態1におけるODO/INS複合航法処理(S150)のフローチャートである。
実施の形態1におけるODO/INS複合航法処理(S150)について、図11に基づいて以下に説明する。
【0104】
S151において、補正計算部141は、慣性装置220により検出された角速度ベクトルと加速度ベクトルとをカルマンフィルタ150により算出されたIMU誤差補正量で補正する。
また、ストラップダウン演算部142は、補正計算部141により補正された角速度ベクトルと加速度ベクトルとに基づいて車両200の位置、姿勢および速度ベクトルを算出する。
そして、ストラップダウン演算部142は、カルマンフィルタ150により算出された航法誤差補正量で補正して車両200の位置、姿勢および速度ベクトルを標定する。
【0105】
S152において、速度/加速度計算部131は、車速検出装置230により検出された車速パルスに基づいて速度スカラーと加速度スカラーとを算出する。
【0106】
S153において、速度/加速度予測部132は、速度/加速度計算部131により算出された速度スカラー、横滑り特性学習部110により算出されたコーナリングパワー、横滑り特性学習部110により算出されたオフセットおよび補正計算部141により補正された加速度の左右方向成分値(単位コーナリングフォース)に基づいて速度ベクトルを算出する。
さらに、速度/加速度予測部132は、速度/加速度計算部131により算出された加速度スカラーに基づいて加速度ベクトルを算出する。
【0107】
S154において、速度/加速度残差計算部133は、速度/加速度予測部132により算出された速度ベクトルとストラップダウン演算部142により標定された速度ベクトルとの差を速度ベクトル残差として算出する。
さらに、速度/加速度残差計算部133は、速度/加速度予測部132により算出された加速度ベクトルと補正計算部141により補正された加速度ベクトルとの差を加速度ベクトル残差として算出する。
【0108】
S155において、カルマンフィルタ150は、速度/加速度残差計算部133により算出された速度ベクトル残差と加速度ベクトル残差とに基づいて航法誤差補正量とIMU誤差補正量とを算出する。
【0109】
S156において、補正計算部141は、慣性装置220により新たに検出された角速度ベクトルと加速度ベクトルとをカルマンフィルタ150により新たに算出されたIMU誤差補正量で補正する。
また、ストラップダウン演算部142は、補正計算部141により補正された角速度ベクトルと加速度ベクトルとに基づいて車両200の位置、姿勢および速度ベクトルを算出する。
そして、ストラップダウン演算部142は、カルマンフィルタ150により新たに算出された航法誤差補正量で補正して車両200の位置、姿勢および速度ベクトルを標定する。
【0110】
図12は、実施の形態1における自己位置姿勢標定装置100の標定精度を示すグラフである。
実施の形態1における自己位置姿勢標定装置100の標定精度について、図12に基づいて以下に説明する。
【0111】
自己位置姿勢標定装置100の標定精度を評価するために、GPS衛星を遮るものが無い場所に周回コースを設け、車両200で周回コースを走行してデータを収集した。
そして、収集したデータから以下の測位結果(a)〜(c)を得た。
【0112】
(a)GPS/INS複合航法処理(S130)による測位結果
(b)ODO/INS複合航法処理(S150)による測位結果
(c)ODO/INS複合航法処理(S150)においてコーナリングパワーSslipと単位コーナリングフォースayとを「0」にしたときの測位結果(従来手法に相当)
測位結果(a)をリファレンス値(真値)とする。
【0113】
図12において、測位結果(a)の座標値に対する測位結果(b)の座標値の誤差をグラフA(十字形マークのプロット)で示し、測位結果(a)の座標値に対する測位結果(c)の座標値の誤差をグラフB(四角形マークのプロット)で示す。
横軸は時間、縦軸は距離を示している。
【0114】
グラフAとグラフBとを比較するとグラフAの方が誤差が少ないことが分かる。特に、車両200がカーブを曲がっている時間帯(「278595」付近、「278675」付近)においてその差が顕著に表れている。
【0115】
つまり、横滑りを考慮した実施の形態1の手法は横滑りを考慮しない従来手法に比べて高い精度で位置を標定することができる。
そして、実施の形態1の手法は、GPS不可視時においても高い精度で位置、姿勢および速度ベクトルを標定することができる手法である。
【0116】
グラフAとグラフBは大小を繰り返しているが、これは車速の増減に伴うものである。車速が速い時には誤差が大きくなる傾向にある。車速検出装置の精度に限界があるため、高速による走行では位置標定精度が劣化することが知られている。
【0117】
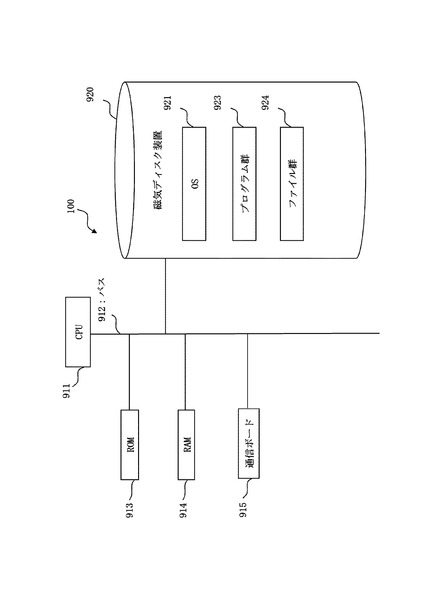
図13は、実施の形態1における自己位置姿勢標定装置100のハードウェア資源の一例を示す図である。
図13において、自己位置姿勢標定装置100は、CPU911(Central・Processing・Unit)(マイクロプロセッサ、マイクロコンピュータともいう)を備えている。CPU911は、バス912を介してROM913、RAM914、通信ボード915、磁気ディスク装置920と接続され、これらのハードウェアデバイスを制御する。
【0118】
通信ボード915は、有線または無線で、LAN(Local Area Network)、インターネット、電話回線などの通信網に接続している。
【0119】
磁気ディスク装置920には、OS921(オペレーティングシステム)、プログラム群923、ファイル群924が記憶されている。
【0120】
プログラム群923には、実施の形態において「〜部」として説明する機能を実行するプログラムが含まれる。プログラムは、CPU911により読み出され実行される。すなわち、プログラムは、「〜部」としてコンピュータを機能させるものであり、また「〜部」の手順や方法をコンピュータに実行させるものである。
【0121】
ファイル群924には、実施の形態において説明する「〜部」で使用される各種データ(入力、出力、判定結果、計算結果、処理結果など)が含まれる。
【0122】
実施の形態において構成図およびフローチャートに含まれている矢印は主としてデータや信号の入出力を示す。
【0123】
実施の形態において「〜部」として説明するものは「〜回路」、「〜装置」、「〜機器」であってもよく、また「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ファームウェア、ソフトウェア、ハードウェアまたはこれらの組み合わせのいずれで実装されても構わない。
【0124】
実施の形態1において、例えば、以下のような自己位置姿勢標定装置100について説明した。
自己位置姿勢標定装置100は、GPS、IMU、ODOといったセンサを用いて車両の自己位置姿勢を標定する装置である。
自己位置姿勢標定装置100は、車両のコーナリングフォースおよび横滑り角を考慮することによって高い精度で車両の自己位置姿勢を標定することを可能にする。
自己位置姿勢標定装置100は、都市部のようにGPSの衛星補足数が十分確保できないGPS不可視条件下でも標定精度の劣化を防ぐことを目的とする。
【0125】
自己位置姿勢標定装置100は、以下のような特徴を有する。
(1)GPS受信データなどのセンサデータによって計測できる車両の単位コーナリングフォースと横滑り角との1次相関を逐次学習する(図6参照)。
(2)車両に設置したセンサの設置ズレやタイヤの特性等によって走行時に発生する車両座標系からのズレ(ピッチ、ヨー両軸のオフセット)を補正する(式(1)参照)。
(3)カルマンフィルタへの観測情報の入力として、補正した車速と車両のコーナリングフォースとを考慮した観測ノイズ行列を用いる(式(2)参照)。
【0126】
このような特徴を有することにより、自己位置姿勢標定装置100は、GPS不可視時において標定精度の劣化を抑制できる。また、自己位置姿勢標定装置100は、車速の誤差推定値(IMU誤差補正量、航法誤差補正量)をより精度良く推測するため、GPS不可視時の精度劣化状況(状態量の分散共分散)に、より高い信憑性(正確性)を持たせることが可能となる。
自己位置姿勢標定装置100は、車速値(例えば、車速パルス)が重要になるGPS不可視時の位置姿勢標定精度の維持手段として、極めて有効である。
【0127】
コーナリングパワーは路面の状況や車両重量(乗車人数、燃料)により異なるため、コーナリングパワーを固定値にすると車速パルスから求まる速度ベクトルの精度が劣化する。
車両のセンサデータは、乗車人数、雨や雪など天候による道路面状況、傾斜やカーブなどの道路形状などによって変化し、ノイズなど不確定な要素が存在する。また、車両のセンサデータは車速や横力の大きさに比例する。このため、車載を前提として簡略化し、スケールファクタ誤差(ホワイトノイズ)を考慮したノイズ成分のモデルでは、車両の状態を考慮したオフセットやノイズの成分が車速に十分に反映されない。そして、カルマンフィルタ演算における状態量そのものの信憑性(正確性)をなくし、位置標定精度の劣化要因の一因となる。
【0128】
そこで、実施の形態では、GPSの可視環境下でこれらの値(横滑り特性)を学習しつつ、車速パルス(またはオドメトリ値)から求まる車速のスカラー量をベクトル化し、車速ベクトルを算出している。
このように、オフセット値、コーナリングパワー、単位コーナリングフォースを考慮してGPS可視環境下で車速を逐次算出することで、GPSの可視環境から不可視環境になったときに、より高精度に車速を算出ができる。
そして、算出した車速をカルマンフィルタの観測更新演算の観測行列に利用し、位置標定精度を維持することができる。
また、その時の誤差の分散行列をカルマンフィルタにおける観測更新演算における観測ノイズ行列として用いる。コーナリングフォースを考慮したノイズを重畳することで、車両の状態をより正確に反映する速度を算出することができる。
【0129】
実施の形態において、二重位相差残差以外のGPS観測情報をカルマンフィルタの入力としてもよい。例えば、並進系二重位相差残差の代わりにGPS受信機で測位された位置をカルマンフィルタの入力とし、姿勢系二重位相差残差の代わりにGPSコンパスにより算出される姿勢をカルマンフィルタの入力としてもよい。
また、車両の停止中はIMU処理部140やカルマンフィルタ150を停止してもよい。
【符号の説明】
【0130】
100 自己位置姿勢標定装置、110 横滑り特性学習部、120 GPS処理部、121 並進系二重位相差計算部、122 並進系二重位相差予測部、123 並進系二重位相差残差計算部、124 姿勢系二重位相差計算部、125 姿勢系二重位相差予測部、126 姿勢系二重位相差残差計算部、127 デザイン行列計算部、130 ODO処理部、131 速度/加速度計算部、132 速度/加速度予測部、133 速度/加速度残差計算部、140 IMU処理部、141 補正計算部、142 ストラップダウン演算部、150 カルマンフィルタ、190 標定装置記憶部、200 車両、201 天板、210 主局GPS、211,212 従局GPS、220 慣性装置、230 車速検出装置、299 基準局GPS、911 CPU、912 バス、913 ROM、914 RAM、915 通信ボード、920 磁気ディスク装置、921 OS、923 プログラム群、924 ファイル群。
【技術分野】
【0001】
本発明は、例えば、GPS衛星(GPS:Global Positioning System)の不可視時に車両の位置を高い精度で標定するための位置標定装置、位置標定方法、位置標定プログラム、速度ベクトル算出装置、速度ベクトル算出方法および速度ベクトル算出プログラムに関するものである。
【背景技術】
【0002】
GPS/IMU(Inertial Measurement Unit)を用いて車両の位置を測位する測位装置において、GPS衛星の不可視時に測位精度を維持するために車速パルス(またはオドメトリ)を利用することがある。
このとき、車速パルスから得られる前後方向の車速が車両の進行方向の速度として扱われる。
【0003】
しかし、車両の向きを計測するジャイロには取り付け角度の誤差が生じるため、計測される車両の向きと実際の車両の向きとは一致しない。
さらに、車両がコーナーを曲がっているときには車両に横滑りが生じるため、車両の前後方向と車両の進行方向とは一致しない。
このため、車速パルスから得られる車速を車両の進行方向の速度として扱うと、実際の車両の進行方向の速度に対してジャイロの取り付け誤差と車両の横滑り誤差とが生じる。つまり、GPS衛星の不可視時に測位精度を維持することができなくなる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許3875714号公報
【特許文献2】特開2006−138834号公報
【特許文献3】特開2008−249639号公報
【非特許文献】
【0005】
【非特許文献1】山口裕之,浅野勝宏,天野也寸志,“車体横すべり角推定法の開発”,日本機械学會論文集C編67(659),pp.2291−2298,2001
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、例えば、GPS衛星の不可視時に車両の位置を高い精度で標定できるようにすることを目的とする。
【課題を解決するための手段】
【0007】
本発明の位置標定装置は、GPS衛星(GPS:Global Positioning System)から発信される搬送波を観測するGPS受信機と加速度ベクトルを検出する慣性装置と車速値を検出する車速検出装置とが設置された車両の座標値を標定する。
【0008】
位置標定装置は、前記慣性装置により検出された加速度ベクトルに基づいて車両の座標値と車両の速度ベクトルとを算出する慣性航法部と、
GPS衛星の可視時に前記GPS受信機により取得された観測値に基づいて所定の情報を観測情報として生成する観測情報生成部と、
前記観測情報生成部により生成された観測情報を用いて前記慣性航法部の算出誤差の補正量をGPS可視時補正量として算出するカルマンフィルタと、
前記慣性航法部により算出された車両の座標値と車両の速度ベクトルとを前記カルマンフィルタにより算出されたGPS可視時補正量により補正する航法補正部と、
前記車速検出装置により検出された車速値に基づいて車両の速度スカラーを算出する速度スカラー算出部と、
GPS衛星の可視時に前記速度スカラー算出部により算出された速度スカラーと前記航法補正部により補正された速度ベクトルの左右方向成分とに基づいて車両の横滑り角を算出する横滑り角算出部と、
前記横滑り角算出部により算出された横滑り角と前記慣性装置により検出された加速度ベクトルの左右方向成分とを対応づけて蓄積する横滑り角蓄積部と、
前記横滑り角蓄積部に蓄積された横滑り角に基づいて車両の加速度ベクトルの左右方向成分と横滑り角との関係値をコーナリングパワーとして算出するコーナリングパワー算出部と、
GPS衛星が不可視であるGPS不可視時点に前記速度スカラー算出部により算出された速度スカラーと前記慣性装置により前記GPS不可視時点に検出された加速度ベクトルの左右方向成分と前記コーナリングパワー算出部により算出されたコーナリングパワーとに基づいて車両の速度ベクトルを算出する速度ベクトル算出部と、
前記慣性航法部により前記GPS不可視時点に算出された速度ベクトルと前記速度ベクトル算出部により算出された速度ベクトルとの差を速度ベクトル残差として算出する速度ベクトル残差算出部とを備え、
前記カルマンフィルタは、前記速度ベクトル残差算出部により算出された速度ベクトル残差を用いて前記慣性航法部の算出誤差の補正量をGPS不可視時補正量として算出し、
前記航法補正部は、GPS衛星の可視時に前記慣性航法部により算出された車両の座標値を前記GPS可視時補正量により補正することにより車両の座標値を標定し、GPS衛星の不可視時に前記慣性航法部により算出された車両の座標値を前記GPS不可視時補正量により補正することにより車両の座標値を標定する。
【発明の効果】
【0009】
本発明によれば、例えば、GPS衛星の不可視時に車両の位置を高い精度で標定することができる。
【図面の簡単な説明】
【0010】
【図1】実施の形態1における車両200の構成図。
【図2】実施の形態1における自己位置姿勢標定装置100の機能構成図。
【図3】実施の形態1におけるODO処理部130およびIMU処理部140の機能構成図。
【図4】実施の形態1における横滑り角βを示す図。
【図5】実施の形態1における車両座標系xyzと慣性装置220のオフセットOSとの関係図。
【図6】実施の形態1におけるコーナリングパワーSslipとオフセットos[1]とを表すグラフ。
【図7】実施の形態1におけるGPS処理部120の機能構成図。
【図8】実施の形態1における自己位置姿勢標定方法を示すフローチャート。
【図9】実施の形態1におけるGPS/INS複合航法処理(S130)のフローチャート。
【図10】実施の形態1における横滑り特性学習処理(S140)のフローチャート。
【図11】実施の形態1におけるODO/INS複合航法処理(S150)のフローチャート。
【図12】実施の形態1における自己位置姿勢標定装置100の標定精度を示すグラフ。
【図13】実施の形態1における自己位置姿勢標定装置100のハードウェア資源の一例を示す図。
【発明を実施するための形態】
【0011】
実施の形態1.
GPS衛星の可視時にGPS/INS(Inertial Navigation System)複合航法により車両の位置を標定し、GPS衛星の不可視時にODO(ODOmetry)/INS複合航法により車両の位置を標定する標定装置について説明する。
標定装置は、GPS衛星の可視時にGPS/INS複合航法により得られる車両の速度ベクトルに基づいて車両の横滑り特性を学習し、GPS衛星の不可視時に車両の横滑り特性を考慮してODO/INS複合航法により車両の位置を標定する。
【0012】
図1は、実施の形態1における車両200の構成図である。
実施の形態1における車両200の構成について、図1に基づいて以下に説明する。
【0013】
車両200には天板201が設置され、天板201には3台のGPS受信機と慣性装置220とが取り付けられている。
車両200は自己位置姿勢標定装置100および車速検出装置230を備える。
【0014】
天板201の3台のGPS受信機のうち1台を主局のGPS受信機とし、残りの2台を従局のGPS受信機とする。以下、主局のGPS受信機を「主局GPS210」といい、従局のGPS受信機を「従局GPS(211、212)」という。
各GPS受信機は、GPS衛星から定期的に発信されるGPSの測位信号を受信し、受信結果から特定の観測値を取得し、取得した観測値を出力する。以下、GPS受信機がGPSの測位信号を受信して観測値を得ることを「観測」という。また、GPSの測位信号を「搬送波」という。搬送波にはエフェメリスなどの航法メッセージが含まれる。
GPS受信機が出力する観測値には、受信した搬送波の位相(搬送波位相)、GPS受信機とGPS衛星との距離(疑似距離)、GPS受信機の座標値、航法メッセージなどがある。
【0015】
慣性装置220(IMU)は、ジャイロセンサと加速度センサとを備える。
ジャイロセンサは、周期的に、車両200の3軸(x,y,z)方向の角速度を検出して出力する。以下、3軸方向の角速度を「角速度ベクトル」という。
加速度センサは、周期的に、車両200の3軸方向の加速度を検出して出力する。以下、3軸方向の加速度を「加速度ベクトル」という。
【0016】
以下、車両200の前後方向(縦、長さ方向)を「x軸」、車両200の左右方向(横、幅方向)を「y軸」、車両200の上下方向(高さ方向)を「z軸」とする。
x軸回りの角度を「ロール角φ(回転角)」、y軸回りの角度を「ピッチ角θ(仰角)」、z軸回りの角度を「ヨー角ψ(方位角)」という。
xyz軸で表される座標系(原点O)を「車両座標系」とする。
【0017】
ジャイロセンサと加速度センサには多少の取り付け誤差が生じる。このため、ジャイロセンサにより検出された角速度ベクトルと加速度センサにより検出された加速度ベクトルは車両座標系に対して正確な値ではない。
【0018】
車速検出装置230(ODO)は、周期的に、車両200の速度に相当する車速値(例えば、車速パルス、オドメトリ値)を検出して出力する。以下、車速検出装置230は車速値として車速パルスを検出するものとする。車速パルスは単位時間当たりのタイヤの回転数を表す。車速パルスにタイヤの円周の長さを掛けることにより車両200の速度(スカラー量)が求まる。
以下、車速検出装置230により検出された車速パルスから求まる速度を「速度スカラー」という。
【0019】
自己位置姿勢標定装置100は、各GPS受信機の観測値と慣性装置220の検出値(角速度ベクトル、加速度ベクトル)と車速検出装置230の検出値(車速パルス)とに基づいて車両200の位置(座標値)、姿勢(姿勢角、向き)および速度ベクトルを標定する。
【0020】
例えば、位置とは(緯度、経度、高度)であり、姿勢とは(ロール角、ピッチ角、ヨー角)である。
速度ベクトルは速度を3軸成分に分けて表すデータである。
【0021】
図2は、実施の形態1における自己位置姿勢標定装置100の機能構成図である。
実施の形態1における自己位置姿勢標定装置100の機能構成について、図2に基づいて以下に説明する。
【0022】
自己位置姿勢標定装置100は、横滑り特性学習部110、GPS処理部120、ODO処理部130、IMU処理部140、カルマンフィルタ150および標定装置記憶部190を備える。
【0023】
GPS処理部120は、車両200に設置された主局GPS210、従局GPS211および従局GPS212それぞれが観測した搬送波位相と基準局GPS299が観測した搬送波位相とに基づいて二重位相差残差を算出する。
基準局GPS299とは、位置が固定であり座標値が既知であるGPS受信機(電子基準点ともいう)である。
各GPS受信機からGPS衛星が可視であるときに、各GPS受信機により搬送波位相が観測される。
以下、各GPS受信機から所定数以上のGPS衛星が可視であるときを「GPS可視時」といい、各GPS受信機から所定数以上のGPS衛星が可視でないとき(不可視であるとき)を「GPS不可視時」という。
【0024】
カルマンフィルタ150は、GPS処理部120により算出される二重位相差残差、またはODO処理部130により算出される速度残差を用いて、IMU処理部140の算出値(車両200の位置、姿勢および速度ベクトル)の誤差の補正量を算出する。
【0025】
IMU処理部140は、車両200に設置された慣性装置220により検出された加速度ベクトルおよび角速度ベクトルに基づいて車両200の位置、姿勢および速度ベクトルを慣性航法(INS)により算出する。
IMU処理部140は、算出した位置、姿勢および速度ベクトルをカルマンフィルタ150により算出された誤差補正量を用いて補正し、補正後の位置、姿勢および速度を出力する。
以下、車両200の位置、姿勢および速度ベクトルを算出し、補正することを「標定」という。
また、標定された位置、姿勢および速度ベクトルを出力することを「航法出力」という。
【0026】
横滑り特性学習部110は、GPS可視時にIMU処理部140により標定された車両200の速度ベクトルに基づいて、車両200に生じる横滑りの特性を学習する。
【0027】
ODO処理部130は、GPS不可視時に車速検出装置230により検出された車速パルスと横滑り特性学習部110により学習された横滑りの特性とに基づいて、車両200の速度ベクトルを算出する。
ODO処理部130は、自己が算出した速度ベクトルとIMU処理部140により標定された速度ベクトルとの誤差(速度残差)を算出する。
【0028】
標定装置記憶部190は、自己位置姿勢標定装置100が使用するデータを記憶する。各「〜部」およびカルマンフィルタ150の入力データ、算出データおよび出力データは標定装置記憶部190に記憶される。
各GPS受信機により観測された搬送波位相、車速検出装置230により検出された車速パルス、慣性装置220により検出された加速度ベクトルおよび角速度ベクトル、横滑り特性学習部110により学習された横滑りの特性値、IMU処理部140の航法出力値は標定装置記憶部190に記憶されるデータの一例である。
【0029】
図3は、実施の形態1におけるODO処理部130およびIMU処理部140の機能構成図である。
実施の形態1におけるODO処理部130およびIMU処理部140の機能構成について、図3に基づいて以下に説明する。
【0030】
ODO処理部130は、速度/加速度計算部131(速度スカラー算出部の一例)、速度/加速度予測部132([第2の]速度ベクトル算出部の一例)および速度/加速度残差計算部133(速度ベクトル残差算出部の一例)を備える。
【0031】
IMU処理部140は、補正計算部141(慣性誤差補正部の一例)とストラップダウン演算部142(慣性航法部、航法補正部、第1の速度ベクトル算出部の一例)とを備える。
【0032】
GPS可視時において、自己位置姿勢標定装置100の各構成は以下のように機能する。
【0033】
GPS処理部120(観測情報生成部の一例)は、各GPS受信機により観測された搬送波位相(観測値の一例)に基づいて二重位相差残差(搬送波位相の二重差の残差)(観測情報の一例)を算出する。
【0034】
カルマンフィルタ150は、GPS処理部120により算出された二重位相差残差を用いて、慣性装置220の検出誤差の補正量とストラップダウン演算部142の演算誤差の補正量とを算出する。
以下、慣性装置220の検出誤差の補正量を「IMU誤差補正量(慣性誤差補正量の一例)」といい、ストラップダウン演算部142の演算誤差の補正量を「航法誤差補正量(GPS可視時補正量の一例)」という。
IMU誤差補正量には、慣性装置220により検出された角速度ベクトルと加速度ベクトルとのそれぞれの誤差を補正する値が含まれる。
航法誤差補正量には、ストラップダウン演算部142により算出された車両200の位置、姿勢および速度ベクトルそれぞれの誤差を補正する値が含まれる。
【0035】
補正計算部141は、慣性装置220から新たに出力された角速度ベクトルおよび加速度ベクトルをカルマンフィルタ150により新たに算出されたIMU誤差補正量で補正する。このとき、補正計算部141は、角速度ベクトルに角速度ベクトルに対する補正量を加算(または減算)し、加速度ベクトルに加速度ベクトルに対する補正量を加算する。
【0036】
ストラップダウン演算部142は、補正計算部141により補正された角速度ベクトルおよび加速度ベクトルを用いてストラップダウン演算を行う。ストラップダウン演算において、ストラップダウン演算部142は、角速度ベクトルを積分して姿勢(角度ベクトル)を算出し、加速度ベクトルを積分して速度ベクトルを算出する。さらに、ストラップダウン演算部142は、速度ベクトルを積分して距離ベクトルを算出し、前回の位置に距離ベクトルを加算して現在の位置を算出する。
ストラップダウン演算部142は、ストラップダウン演算により得られた車両200の位置、姿勢および速度ベクトルをカルマンフィルタ150により新たに算出された航法誤差補正量で補正する。このとき、ストラップダウン演算部142は、車両200の位置、姿勢および速度ベクトルにそれぞれの補正量を加算する。
ストラップダウン演算部142は、標定(算出および補正)した車両200の位置、姿勢および速度ベクトルを出力する。
【0037】
速度/加速度計算部131は、車速検出装置230から出力された車速パルスにタイヤの円周の長さを掛けて車両200の速度スカラーを算出する。
速度/加速度計算部131は、算出した速度スカラーを微分して車両200の加速度(スカラー量)を算出する。
【0038】
横滑り特性学習部110(横滑り角算出部の一例)は、速度/加速度計算部131により算出された速度スカラーを速度ベクトルの前後方向成分(x軸成分)として扱い、ストラップダウン演算部142により標定された速度ベクトルの左右方向成分値(y軸成分)を速度スカラーで割った値を横滑り角として算出する。
すなわち、「横滑り角β=速度ベクトルの左右方向成分値Vy/速度スカラーVodo」である。「Vy/Vodo」をタンジェント(tan)の値とする角度を横滑り角βとしてもよい。
ここで、速度スカラーと速度ベクトルとは同期が取られているものとする。つまり、速度スカラーと速度ベクトルとは同時刻に取得された元データ(速度パルス、加速度ベクトル)から算出されたもの、または同時刻に取得されたように加工した元データから算出されたものである。
【0039】
図4は、実施の形態1における横滑り角βを示す図である。
図4において、車両200がコーナーを曲がっているとき(車両にヨーレートがあるとき)、車両200は横力を受けてタイヤの傾きよりも浅い角度の方向へ進む。つまり、車両200はコーナリング時に横滑りし、横滑り角βが生じる。このとき、タイヤの向きと車両200の進行方向とが成すヨー角が横滑り角βである。
横滑り特性学習部110は、この横滑り角βを上記のように算出する。
【0040】
図3に戻り、横滑り特性学習部110の説明を続ける。
【0041】
横滑り特性学習部110は、算出した横滑り角と補正計算部141により補正された加速度ベクトルの左右方向成分値(y軸成分)とを対応づけて標定装置記憶部190(横滑り角蓄積部の一例)に記憶する。標定装置記憶部190には、GPS可視時の間に得られた多数の横滑り角と加速度ベクトルの左右方向成分値とが蓄積される。
【0042】
横滑り特性学習部110(コーナリングパワー算出部の一例)は、蓄積された横滑り角と加速度ベクトルの左右方向成分値とに基づいて、車両200に掛かるコーナリングパワーと慣性装置220のオフセット(取り付け誤差分のずれ量)とを算出する。
【0043】
例えば、横滑り特性学習部110は、以下のようなタイミングでコーナリングパワーとオフセットとを算出し直して更新する。
・定期的または新たな横滑り角と加速度ベクトルの左右方向成分値とが蓄積されたとき。
・GPS不可視時になったとき(各GPS受信機から搬送波位相が入力されなくなったとき)。
【0044】
コーナリングパワーとは、単位コーナリングフォース当たりの横滑り角、すなわち、単位コーナリングフォースに対する横滑り角の変化率のことである。
コーナリングフォースとは加速度ベクトルの左右方向成分値に質量(ここでは車両200の重量)を掛けた値であり、単位コーナリングフォースとは単位質量当たりのコーナリングフォースである。
すなわち、コーナリングフォースとは、加速度ベクトルの左右方向成分値である。
【0045】
図5は、実施の形態1における車両座標系xyzと慣性装置220のオフセットOSとの関係図である。
実施の形態1における慣性装置220のオフセットOSについて、図5に基づいて以下に説明する。
【0046】
慣性装置220には車両座標系(xyz)に対して取り付け誤差(オフセット)が生じる。
このため、慣性装置220は、車両200がx軸方向へ進んでいても、車両200がx軸方向からずれたV方向へ進んでいるような角速度ベクトルと加速度ベクトルとを検出する。
以下、慣性装置220のz軸方向(ピッチ角)のオフセットを「os[0]」と記し、慣性装置220のy軸方向(ヨー角)のオフセットを「os[1]」と記す。
【0047】
図6は、実施の形態1におけるコーナリングパワーSslipとオフセットos[1]とを表すグラフである。
実施の形態1におけるコーナリングパワーSslipとオフセットos[1]とを表すグラフについて、図6に基づいて以下に説明する。
【0048】
横滑り特性学習部110は、横軸に単位コーナリングフォースay(加速度ベクトルの左右方向成分)、縦軸に横滑り角βをとり、蓄積された各横滑り角と加速度ベクトルの左右方向成分値とに対応する点をプロットする(図示省略)。
横滑り特性学習部110は、プロットされた各点の平均をとって横滑り特性直線L(一次回帰直線)を算出する。
【0049】
横滑り特性直線Lは、単位コーナリングフォースayの特定範囲内と単位コーナリングフォースayの特定範囲外とで傾きが異なる。
つまり、車両200に掛かる単位コーナリングフォースayが特定範囲内の大きさであるとき、車両200には単位コーナリングフォースayに比例した横滑り角βが生じる。しかし、車両200に掛かる単位コーナリングフォースayが特定範囲を超えた大きさになると、車両200に生じる横滑り角βは増大する。
【0050】
横滑り特性学習部110は、横滑り特性直線Lの傾きをコーナリングパワーSslipとして算出し、横滑り特性直線Lの切片(単位コーナリングフォースayが「0」のときの横滑り角β)をオフセットos[1]として算出する。
【0051】
横滑り特性学習部110は、オフセットos[1]と同様に、オフセットos[0]を算出する。
例えば、横滑り特性学習部110は、ストラップダウン演算部142により標定された速度ベクトルの上下方向成分値を速度スカラーで割った値をオフセット角として算出し、オフセット角と慣性装置220により検出された加速度ベクトルの上下方向成分値とを対応づけて蓄積する。横滑り特性学習部110は、オフセット角と加速度ベクトルの上下方向成分値とに対応する点をプロットし、各点の平均をとった直線の切片をオフセットos[0]として算出する。
【0052】
オフセットos[0][1]を測量等により予め特定しておいても構わない。
【0053】
図3に戻り、自己位置姿勢標定装置100の説明を続ける。
【0054】
GPS不可視時において、自己位置姿勢標定装置100の各構成は以下のように機能する。
【0055】
GPS可視時と同様に、速度/加速度計算部131は速度スカラーと加速度スカラーを算出し、補正計算部141は角速度ベクトルと加速度ベクトルとを補正し、ストラップダウン演算部142は位置、姿勢および速度ベクトルを標定する。
【0056】
速度/加速度予測部132は、速度/加速度計算部131により算出された速度スカラーと横滑り特性学習部110により算出されたコーナリングパワーと横滑り特性学習部110により算出されたオフセットと補正計算部141により補正された加速度ベクトルの左右方向成分値とに基づいて、車両200の速度ベクトルを算出する。
ここで、速度スカラーと加速度ベクトルとは同期が取られているものとする。
【0057】
車両200の速度ベクトルVbの算出式(1)を以下に示す。式(1)において、「Vodo」は速度スカラー、「os[0]」はピッチ角オフセット、「os[1]」はヨー角オフセット、「Sslip」はコーナリングパワー、「ay」は単位コーナリングフォース(加速度ベクトルの左右方向成分値)を示す。
【0058】
【数1】
【0059】
速度/加速度予測部132は、式(1)の速度スカラーVodoを加速度スカラーに置き換えて加速度ベクトルを算出する。
【0060】
速度/加速度残差計算部133は、速度/加速度予測部132により算出された速度ベクトルとストラップダウン演算部142により標定された速度ベクトルとの差を「速度ベクトル残差」として算出する。
速度/加速度残差計算部133は、速度/加速度予測部132により算出された加速度ベクトルと補正計算部141により補正された加速度ベクトルとの差を「加速度ベクトル残差」として算出する。
ここで、2つの速度ベクトルおよび2つの加速度ベクトルは同期が取られているものとする。
【0061】
カルマンフィルタ150は、速度/加速度残差計算部133により算出された速度ベクトル残差と加速度ベクトル残差とを用いて、IMU誤差補正量と航法誤差補正量とを算出する。
【0062】
補正計算部141は、慣性装置220から新たに出力された角速度ベクトルと加速度ベクトルをカルマンフィルタ150により新たに算出されたIMU誤差補正量で補正する。
ストラップダウン演算部142は、補正計算部141により補正された角速度ベクトルと加速度ベクトルとに基づいて車両200の位置、姿勢および速度ベクトルを算出し、算出した位置、姿勢および速度ベクトルをカルマンフィルタ150により新たに算出された航法誤差補正量で補正する。
ストラップダウン演算部142は、標定(算出および補正)した車両200の位置、姿勢および速度ベクトルを出力する。
【0063】
図7は、実施の形態1におけるGPS処理部120の機能構成図である。
実施の形態1におけるGPS処理部120の機能構成について、図7に基づいて以下に説明する。
【0064】
GPS処理部120は、並進系二重位相差計算部121、並進系二重位相差予測部122、並進系二重位相差残差計算部123、姿勢系二重位相差計算部124、姿勢系二重位相差予測部125、姿勢系二重位相差残差計算部126およびデザイン行列計算部127を備える。
【0065】
GPS処理部120の各構成は、GPS可視時に以下のように機能する。
【0066】
並進系二重位相差計算部121は、基準局GPS299と主局GPS210とのそれぞれからGPS衛星Aの搬送波位相とGPS衛星Bの搬送波位相とを入力する。
並進系二重位相差計算部121は、基準局GPS299から入力したGPS衛星Aの搬送波位相と主局GPS210から入力したGPS衛星Aの搬送波位相との差をGPS衛星Aの搬送波位相差として算出する。並進系二重位相差計算部121は、GPS衛星Bについても同様に搬送波位相差を算出する。
並進系二重位相差計算部121は、GPS衛星Aの搬送波位相差とGPS衛星Bの搬送波位相差との差を「並進系二重位相差」として算出する。基準局GPS299と主局GPS210との距離から車両200の位置が定まるため、基準局GPS299と主局GPS210との観測値から求まる観測情報(ここでは、二重位相差)を「並進系」とする。
【0067】
並進系二重位相差予測部122は、基準局GPS299の位置とIMU処理部140により標定された車両200の位置(主局GPS210の位置に相当する)とを入力し、デザイン行列計算部127により算出される並進系デザイン行列に基づいて並進系二重位相差を算出する。
並進系デザイン行列とは、2つのGPS受信機の位置と並進系二重位相差との関係を表す所定の行列である。
【0068】
並進系二重位相差残差計算部123は、並進系二重位相差計算部121により算出された並進系二重位相差と並進系二重位相差予測部122により算出された並進系二重位相差との差を「並進系二重位相差残差」として算出する。
【0069】
姿勢系二重位相差計算部124は、主局GPS210、従局GPS211および従局GPS212のそれぞれからGPS衛星Aの搬送波位相とGPS衛星Bの搬送波位相とを入力する。
姿勢系二重位相差計算部124は、主局GPS210から入力したGPS衛星Aの搬送波位相と従局GPS211から入力したGPS衛星Aの搬送波位相との差をGPS衛星Aの搬送波位相差として算出する。姿勢系二重位相差計算部124は、GPS衛星Bについても同様に搬送波位相差を算出する。
姿勢系二重位相差計算部124は、GPS衛星Aの搬送波位相差とGPS衛星Bの搬送波位相差との差を主局GPS210と従局GPS211とに対する「姿勢系二重位相差」として算出する。主局GPS210と従局GPS211(または従局GPS212)とを結ぶ基線ベクトルは車両200の姿勢を表すため、主局GPS210と従局GPS211(または従局GPS212)との観測値から求まる観測情報(ここでは、二重位相差)を「姿勢系」とする。
姿勢系二重位相差計算部124は、主局GPS210と従局GPS212とに対しても同様に姿勢系二重位相差を算出する。
【0070】
姿勢系二重位相差予測部125は、主局GPS210、従局GPS211および従局GPS212の相対位置「アンテナ座標」(天板201上の2次元の座標値)とIMU処理部140により標定された車両200の姿勢とを入力する。姿勢系二重位相差予測部125は、デザイン行列計算部127により算出される姿勢系デザイン行列に基づいて主局GPS210と従局GPS211とに対する姿勢系二重位相差と主局GPS210と従局GPS212とに対する姿勢系二重位相差とを算出する。
姿勢系デザイン行列とは、2つのGPS受信機の位置と姿勢系二重位相差との関係を表す所定の行列である。主局GPS210、従局GPS211および従局GPS212の相対位置と車両200の姿勢とにより3つのGPS受信機の3次元の相対位置が求まる。
【0071】
姿勢系二重位相差残差計算部126は、姿勢系二重位相差計算部124により算出された主局GPS210と従局GPS211とに対する姿勢系二重位相差と姿勢系二重位相差予測部125により算出された主局GPS210と従局GPS211とに対する姿勢系二重位相差との差を主局GPS210と従局GPS211とに対する「姿勢系二重位相差残差」として算出する。
姿勢系二重位相差残差計算部126は、主局GPS210と従局GPS212とに対しても同様に姿勢系二重位相差残差を算出する。
【0072】
デザイン行列計算部127は、主局GPS210から出力された航法メッセージ(エフェメリス)に基づいて現在のGPS衛星の位置に対応する姿勢系デザイン行列と並進系デザイン行列とを算出する。エフェメリスは各GPS衛星の軌道を示す情報であり、エフェメリスから各GPS衛星の位置が求まる。
【0073】
カルマンフィルタ150は、並進系二重位相差残差計算部123により算出された並進系二重位相差残差と姿勢系二重位相差残差計算部126により算出された2つの姿勢系二重位相差残差とを用いて、IMU誤差補正量と航法誤差補正量とを算出する。
【0074】
IMU処理部140は、カルマンフィルタ150により算出されたIMU誤差補正量と航法誤差補正量とを用いて車両200の位置、姿勢および速度ベクトルを標定する。
【0075】
次に、カルマンフィルタ150の概要について説明する。
カルマンフィルタ150は、モデル化された状態方程式と観測方程式とを用いて航法誤差補正量およびIMU誤差補正量を推定する。カルマンフィルタ150に入力される残差は観測方程式の変数として用いられる。
【0076】
誤差補正量の推定演算では、観測ノイズ行列R、誤差共分散行列Pおよび観測行列Hを用いてカルマンゲインベクトルKが算出される。観測ノイズ行列Rと観測行列Hは残差の種類ごとに用意される。
【0077】
速度残差に対する観測ノイズ行列Rbを式(2)に示す。式(2)において「varVP」「Kx」「Ka」はそれぞれ所定の係数を示す。「Vodo」は速度スカラーを示し、「ay」は単位コーナリングフォースを示す。
【0078】
【数2】
【0079】
速度残差に対する観測ノイズ行列Rbは以下のような特徴を有する。なお、観測ノイズ行列Rbの各行はそれぞれx軸、y軸、z軸に対応する。
・xyz軸で値が異なる。
・単位コーナリングフォースayの大きさによってy軸の値が変化する。
・速度スカラーVodoの大きさによってxyz軸の値が変化する。
【0080】
誤差共分散行列Pは、状態量(位置、姿勢、速度ベクトル、航法誤差補正量、IMU誤差補正量など)の共分散値を表す。
【0081】
観測行列Hは、状態量と観測量(並進系(姿勢系)二重位相差残差、速度ベクトル残差、加速度ベクトル残差など)との関係を表す。
【0082】
カルマンゲインベクトルKの算出式(3)を以下に示す。式(3)において「HT」は観測行列Hの転置行列を表す。
【0083】
【数3】
【0084】
残差dzにカルマンゲインベクトルKを掛けて求まる複数の値(Kdz)が、航法誤差補正量およびIMU誤差補正量となる。
【0085】
主に、並進系二重位相差残差に応じて位置の誤差補正量が定まり、姿勢系二重位相差残差に応じて姿勢の誤差補正量が定まる。また、速度ベクトル残差に応じて速度の誤差補正量が定まり、加速度ベクトル残差に応じて姿勢(ロール角、ピッチ角)の誤差補正量が定まる。
【0086】
次に、自己位置姿勢標定装置100の処理の流れについてまとめる。
【0087】
図8は、実施の形態1における自己位置姿勢標定方法を示すフローチャートである。
実施の形態1における自己位置姿勢標定方法の処理の流れについて、図8に基づいて以下に説明する。
【0088】
自己位置姿勢標定装置100は、以下に説明する処理をCPU(Central Processing Unit)を用いて実行する。
【0089】
初期位置姿勢決定処理(S110)において、自己位置姿勢標定装置100は所定の方法により車両200の位置、姿勢の初期値を決定する。
例えば、自己位置姿勢標定装置100(図示省略する初期値決定部)は、各GPS受信機(299、210〜212)を用いてリアルタイムキネマティックGPS(RTK−GPS)により車両200の位置を測位する。そして、自己位置姿勢標定装置100は、車両200の3つのGPS受信機(210〜212)の位置関係に基づいて車両200の姿勢を算出する(GPSコンパス)。RTK−GPSの測位精度は高く、その誤差は2センチメートル程度である。但し、RTK−GPS以外の方法で位置を測位しても構わない。また、利用者が測量などにより得られた位置、姿勢を自己位置姿勢標定装置100に設定しても構わない。
初期位置姿勢決定処理(S110)の後、自己位置姿勢標定装置100は以下のように動作する。
【0090】
GPS可視時(S120「YES」)、自己位置姿勢標定装置100は、GPS/INS複合航法処理(S130)により車両200の位置、姿勢および速度ベクトルを標定し、横滑り特性学習処理(S140)により車両200の横滑り特性を学習する。
【0091】
GPS不可視時(S120「NO」)、自己位置姿勢標定装置100は、ODO/INS複合航法処理(S150)により車両200の横滑り特性に基づいて車両200の位置、姿勢および速度ベクトルを標定する。
【0092】
自己位置姿勢標定装置100は、S120〜S150を繰り返し実行する。
【0093】
図9は、実施の形態1におけるGPS/INS複合航法処理(S130)のフローチャートである。
実施の形態1におけるGPS/INS複合航法処理(S130)について、図9に基づいて以下に説明する。
【0094】
S131において、GPS処理部120は、各GPS受信機により観測された搬送波位相に基づいて並進系二重位相差残差と姿勢系二重位相差残差とを算出する。
【0095】
S132において、カルマンフィルタ150は、並進系二重位相差残差と姿勢系二重位相差残差とに基づいて航法誤差補正量とIMU誤差補正量とを算出する。
【0096】
S133において、補正計算部141は、慣性装置220により検出された角速度ベクトルと加速度ベクトルとをカルマンフィルタ150により算出されたIMU誤差補正量で補正する。
また、ストラップダウン演算部142は、補正計算部141により補正された角速度ベクトルと加速度ベクトルとに基づいて車両200の位置、姿勢および速度ベクトルを算出する。
そして、ストラップダウン演算部142は、カルマンフィルタ150により算出された航法誤差補正量で補正して車両200の位置、姿勢および速度ベクトルを標定する。
【0097】
図10は、実施の形態1における横滑り特性学習処理(S140)のフローチャートである。
実施の形態1における横滑り特性学習処理(S140)について、図10に基づいて以下に説明する。
【0098】
S141において、速度/加速度計算部131は、車速検出装置230により検出された車速パルスに基づいて速度スカラーを算出する。
【0099】
S142において、横滑り特性学習部110は、速度/加速度計算部131により算出された速度スカラーとストラップダウン演算部142により標定された速度ベクトルの左右方向成分値とに基づいて車両200の横滑り角を算出する。
【0100】
S143において、横滑り特性学習部110は、算出した横滑り角と補正計算部141により補正された加速度ベクトルの左右方向成分(単位コーナリングフォース)とを対応づけて蓄積する。
【0101】
S144において、横滑り特性学習部110は、蓄積された横滑り角に基づいて横滑り特性直線を算出する。
【0102】
S145において、横滑り特性学習部110は、横滑り特性直線に基づいて車両200のコーナリングパワーと慣性装置220のオフセットとを算出する。
【0103】
図11は、実施の形態1におけるODO/INS複合航法処理(S150)のフローチャートである。
実施の形態1におけるODO/INS複合航法処理(S150)について、図11に基づいて以下に説明する。
【0104】
S151において、補正計算部141は、慣性装置220により検出された角速度ベクトルと加速度ベクトルとをカルマンフィルタ150により算出されたIMU誤差補正量で補正する。
また、ストラップダウン演算部142は、補正計算部141により補正された角速度ベクトルと加速度ベクトルとに基づいて車両200の位置、姿勢および速度ベクトルを算出する。
そして、ストラップダウン演算部142は、カルマンフィルタ150により算出された航法誤差補正量で補正して車両200の位置、姿勢および速度ベクトルを標定する。
【0105】
S152において、速度/加速度計算部131は、車速検出装置230により検出された車速パルスに基づいて速度スカラーと加速度スカラーとを算出する。
【0106】
S153において、速度/加速度予測部132は、速度/加速度計算部131により算出された速度スカラー、横滑り特性学習部110により算出されたコーナリングパワー、横滑り特性学習部110により算出されたオフセットおよび補正計算部141により補正された加速度の左右方向成分値(単位コーナリングフォース)に基づいて速度ベクトルを算出する。
さらに、速度/加速度予測部132は、速度/加速度計算部131により算出された加速度スカラーに基づいて加速度ベクトルを算出する。
【0107】
S154において、速度/加速度残差計算部133は、速度/加速度予測部132により算出された速度ベクトルとストラップダウン演算部142により標定された速度ベクトルとの差を速度ベクトル残差として算出する。
さらに、速度/加速度残差計算部133は、速度/加速度予測部132により算出された加速度ベクトルと補正計算部141により補正された加速度ベクトルとの差を加速度ベクトル残差として算出する。
【0108】
S155において、カルマンフィルタ150は、速度/加速度残差計算部133により算出された速度ベクトル残差と加速度ベクトル残差とに基づいて航法誤差補正量とIMU誤差補正量とを算出する。
【0109】
S156において、補正計算部141は、慣性装置220により新たに検出された角速度ベクトルと加速度ベクトルとをカルマンフィルタ150により新たに算出されたIMU誤差補正量で補正する。
また、ストラップダウン演算部142は、補正計算部141により補正された角速度ベクトルと加速度ベクトルとに基づいて車両200の位置、姿勢および速度ベクトルを算出する。
そして、ストラップダウン演算部142は、カルマンフィルタ150により新たに算出された航法誤差補正量で補正して車両200の位置、姿勢および速度ベクトルを標定する。
【0110】
図12は、実施の形態1における自己位置姿勢標定装置100の標定精度を示すグラフである。
実施の形態1における自己位置姿勢標定装置100の標定精度について、図12に基づいて以下に説明する。
【0111】
自己位置姿勢標定装置100の標定精度を評価するために、GPS衛星を遮るものが無い場所に周回コースを設け、車両200で周回コースを走行してデータを収集した。
そして、収集したデータから以下の測位結果(a)〜(c)を得た。
【0112】
(a)GPS/INS複合航法処理(S130)による測位結果
(b)ODO/INS複合航法処理(S150)による測位結果
(c)ODO/INS複合航法処理(S150)においてコーナリングパワーSslipと単位コーナリングフォースayとを「0」にしたときの測位結果(従来手法に相当)
測位結果(a)をリファレンス値(真値)とする。
【0113】
図12において、測位結果(a)の座標値に対する測位結果(b)の座標値の誤差をグラフA(十字形マークのプロット)で示し、測位結果(a)の座標値に対する測位結果(c)の座標値の誤差をグラフB(四角形マークのプロット)で示す。
横軸は時間、縦軸は距離を示している。
【0114】
グラフAとグラフBとを比較するとグラフAの方が誤差が少ないことが分かる。特に、車両200がカーブを曲がっている時間帯(「278595」付近、「278675」付近)においてその差が顕著に表れている。
【0115】
つまり、横滑りを考慮した実施の形態1の手法は横滑りを考慮しない従来手法に比べて高い精度で位置を標定することができる。
そして、実施の形態1の手法は、GPS不可視時においても高い精度で位置、姿勢および速度ベクトルを標定することができる手法である。
【0116】
グラフAとグラフBは大小を繰り返しているが、これは車速の増減に伴うものである。車速が速い時には誤差が大きくなる傾向にある。車速検出装置の精度に限界があるため、高速による走行では位置標定精度が劣化することが知られている。
【0117】
図13は、実施の形態1における自己位置姿勢標定装置100のハードウェア資源の一例を示す図である。
図13において、自己位置姿勢標定装置100は、CPU911(Central・Processing・Unit)(マイクロプロセッサ、マイクロコンピュータともいう)を備えている。CPU911は、バス912を介してROM913、RAM914、通信ボード915、磁気ディスク装置920と接続され、これらのハードウェアデバイスを制御する。
【0118】
通信ボード915は、有線または無線で、LAN(Local Area Network)、インターネット、電話回線などの通信網に接続している。
【0119】
磁気ディスク装置920には、OS921(オペレーティングシステム)、プログラム群923、ファイル群924が記憶されている。
【0120】
プログラム群923には、実施の形態において「〜部」として説明する機能を実行するプログラムが含まれる。プログラムは、CPU911により読み出され実行される。すなわち、プログラムは、「〜部」としてコンピュータを機能させるものであり、また「〜部」の手順や方法をコンピュータに実行させるものである。
【0121】
ファイル群924には、実施の形態において説明する「〜部」で使用される各種データ(入力、出力、判定結果、計算結果、処理結果など)が含まれる。
【0122】
実施の形態において構成図およびフローチャートに含まれている矢印は主としてデータや信号の入出力を示す。
【0123】
実施の形態において「〜部」として説明するものは「〜回路」、「〜装置」、「〜機器」であってもよく、また「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ファームウェア、ソフトウェア、ハードウェアまたはこれらの組み合わせのいずれで実装されても構わない。
【0124】
実施の形態1において、例えば、以下のような自己位置姿勢標定装置100について説明した。
自己位置姿勢標定装置100は、GPS、IMU、ODOといったセンサを用いて車両の自己位置姿勢を標定する装置である。
自己位置姿勢標定装置100は、車両のコーナリングフォースおよび横滑り角を考慮することによって高い精度で車両の自己位置姿勢を標定することを可能にする。
自己位置姿勢標定装置100は、都市部のようにGPSの衛星補足数が十分確保できないGPS不可視条件下でも標定精度の劣化を防ぐことを目的とする。
【0125】
自己位置姿勢標定装置100は、以下のような特徴を有する。
(1)GPS受信データなどのセンサデータによって計測できる車両の単位コーナリングフォースと横滑り角との1次相関を逐次学習する(図6参照)。
(2)車両に設置したセンサの設置ズレやタイヤの特性等によって走行時に発生する車両座標系からのズレ(ピッチ、ヨー両軸のオフセット)を補正する(式(1)参照)。
(3)カルマンフィルタへの観測情報の入力として、補正した車速と車両のコーナリングフォースとを考慮した観測ノイズ行列を用いる(式(2)参照)。
【0126】
このような特徴を有することにより、自己位置姿勢標定装置100は、GPS不可視時において標定精度の劣化を抑制できる。また、自己位置姿勢標定装置100は、車速の誤差推定値(IMU誤差補正量、航法誤差補正量)をより精度良く推測するため、GPS不可視時の精度劣化状況(状態量の分散共分散)に、より高い信憑性(正確性)を持たせることが可能となる。
自己位置姿勢標定装置100は、車速値(例えば、車速パルス)が重要になるGPS不可視時の位置姿勢標定精度の維持手段として、極めて有効である。
【0127】
コーナリングパワーは路面の状況や車両重量(乗車人数、燃料)により異なるため、コーナリングパワーを固定値にすると車速パルスから求まる速度ベクトルの精度が劣化する。
車両のセンサデータは、乗車人数、雨や雪など天候による道路面状況、傾斜やカーブなどの道路形状などによって変化し、ノイズなど不確定な要素が存在する。また、車両のセンサデータは車速や横力の大きさに比例する。このため、車載を前提として簡略化し、スケールファクタ誤差(ホワイトノイズ)を考慮したノイズ成分のモデルでは、車両の状態を考慮したオフセットやノイズの成分が車速に十分に反映されない。そして、カルマンフィルタ演算における状態量そのものの信憑性(正確性)をなくし、位置標定精度の劣化要因の一因となる。
【0128】
そこで、実施の形態では、GPSの可視環境下でこれらの値(横滑り特性)を学習しつつ、車速パルス(またはオドメトリ値)から求まる車速のスカラー量をベクトル化し、車速ベクトルを算出している。
このように、オフセット値、コーナリングパワー、単位コーナリングフォースを考慮してGPS可視環境下で車速を逐次算出することで、GPSの可視環境から不可視環境になったときに、より高精度に車速を算出ができる。
そして、算出した車速をカルマンフィルタの観測更新演算の観測行列に利用し、位置標定精度を維持することができる。
また、その時の誤差の分散行列をカルマンフィルタにおける観測更新演算における観測ノイズ行列として用いる。コーナリングフォースを考慮したノイズを重畳することで、車両の状態をより正確に反映する速度を算出することができる。
【0129】
実施の形態において、二重位相差残差以外のGPS観測情報をカルマンフィルタの入力としてもよい。例えば、並進系二重位相差残差の代わりにGPS受信機で測位された位置をカルマンフィルタの入力とし、姿勢系二重位相差残差の代わりにGPSコンパスにより算出される姿勢をカルマンフィルタの入力としてもよい。
また、車両の停止中はIMU処理部140やカルマンフィルタ150を停止してもよい。
【符号の説明】
【0130】
100 自己位置姿勢標定装置、110 横滑り特性学習部、120 GPS処理部、121 並進系二重位相差計算部、122 並進系二重位相差予測部、123 並進系二重位相差残差計算部、124 姿勢系二重位相差計算部、125 姿勢系二重位相差予測部、126 姿勢系二重位相差残差計算部、127 デザイン行列計算部、130 ODO処理部、131 速度/加速度計算部、132 速度/加速度予測部、133 速度/加速度残差計算部、140 IMU処理部、141 補正計算部、142 ストラップダウン演算部、150 カルマンフィルタ、190 標定装置記憶部、200 車両、201 天板、210 主局GPS、211,212 従局GPS、220 慣性装置、230 車速検出装置、299 基準局GPS、911 CPU、912 バス、913 ROM、914 RAM、915 通信ボード、920 磁気ディスク装置、921 OS、923 プログラム群、924 ファイル群。
【特許請求の範囲】
【請求項1】
GPS衛星(GPS:Global Positioning System)から発信される搬送波を観測するGPS受信機と加速度ベクトルを検出する慣性装置と車速値を検出する車速検出装置とが設置された車両の座標値を標定する位置標定装置において、
前記慣性装置により検出された加速度ベクトルに基づいて車両の座標値と車両の速度ベクトルとを算出する慣性航法部と、
GPS衛星の可視時に前記GPS受信機により取得された観測値に基づいて所定の情報を観測情報として生成する観測情報生成部と、
前記観測情報生成部により生成された観測情報を用いて前記慣性航法部の算出誤差の補正量をGPS可視時補正量として算出するカルマンフィルタと、
前記慣性航法部により算出された車両の座標値と車両の速度ベクトルとを前記カルマンフィルタにより算出されたGPS可視時補正量により補正する航法補正部と、
前記車速検出装置により検出された車速値に基づいて車両の速度スカラーを算出する速度スカラー算出部と、
GPS衛星の可視時に前記速度スカラー算出部により算出された速度スカラーと前記航法補正部により補正された速度ベクトルの左右方向成分とに基づいて車両の横滑り角を算出する横滑り角算出部と、
前記横滑り角算出部により算出された横滑り角と前記慣性装置により検出された加速度ベクトルの左右方向成分とを対応づけて蓄積する横滑り角蓄積部と、
前記横滑り角蓄積部に蓄積された横滑り角に基づいて車両の加速度ベクトルの左右方向成分と横滑り角との関係値をコーナリングパワーとして算出するコーナリングパワー算出部と、
GPS衛星が不可視であるGPS不可視時点に前記速度スカラー算出部により算出された速度スカラーと前記慣性装置により前記GPS不可視時点に検出された加速度ベクトルの左右方向成分と前記コーナリングパワー算出部により算出されたコーナリングパワーとに基づいて車両の速度ベクトルを算出する速度ベクトル算出部と、
前記慣性航法部により前記GPS不可視時点に算出された速度ベクトルと前記速度ベクトル算出部により算出された速度ベクトルとの差を速度ベクトル残差として算出する速度ベクトル残差算出部とを備え、
前記カルマンフィルタは、前記速度ベクトル残差算出部により算出された速度ベクトル残差を用いて前記慣性航法部の算出誤差の補正量をGPS不可視時補正量として算出し、
前記航法補正部は、GPS衛星の可視時に前記慣性航法部により算出された車両の座標値を前記GPS可視時補正量により補正することにより車両の座標値を標定し、GPS衛星の不可視時に前記慣性航法部により算出された車両の座標値を前記GPS不可視時補正量により補正することにより車両の座標値を標定する
ことを特徴とする位置標定装置。
【請求項2】
前記カルマンフィルタで用いる観測ノイズ行列が、速度ベクトルの前後方向成分に対応する行と速度ベクトルの左右方向に対応する行と速度ベクトルの上下方向成分に対応する行とで値が異なる
ことを特徴とする請求項1記載の位置標定装置。
【請求項3】
前記カルマンフィルタで用いる観測ノイズ行列において速度ベクトルの左右方向に対応する行の値が車両の加速度ベクトルの左右方向成分に応じて変化する
ことを特徴とする請求項1または請求項2記載の位置標定装置。
【請求項4】
前記カルマンフィルタで用いる観測ノイズ行列において速度ベクトルの前後方向成分に対応する行と速度ベクトルの左右方向に対応する行と速度ベクトルの上下方向成分に対応する行とのそれぞれの値が車両の速度スカラーに応じて変化する
ことを特徴とする請求項1〜請求項3いずれかに記載の位置標定装置。
【請求項5】
前記カルマンフィルタは、前記慣性装置の検出誤差の補正量を慣性誤差補正量として算出し、
前記位置標定装置は、さらに、
前記慣性装置により検出された加速度ベクトルを前記カルマンフィルタにより算出された慣性誤差補正量により補正する慣性誤差補正部を備え、
前記慣性航法部は、前記慣性誤差補正部により補正された加速度ベクトルに基づいて車両の座標値と車両の速度ベクトルとを算出する
ことを特徴とする請求項1〜請求項4いずれかに記載の位置標定装置。
【請求項6】
前記観測情報生成部は、前記GPS受信機により観測値として取得された搬送波位相に基づいて搬送波位相の二重差の残差を観測情報として算出する
ことを特徴とする請求項1〜請求項5いずれかに記載の位置標定装置。
【請求項7】
GPS衛星(GPS:Global Positioning System)から発信される搬送波を観測するGPS受信機と加速度ベクトルを検出する慣性装置と車速値を検出する車速検出装置とが設置された車両の座標値を標定する位置標定方法において、
慣性航法部が、前記慣性装置により検出された加速度ベクトルに基づいて車両の座標値と車両の速度ベクトルとを算出し、
観測情報生成部が、GPS衛星の可視時に前記GPS受信機により取得された観測値に基づいて所定の情報を観測情報として生成し、
カルマンフィルタが、前記観測情報生成部により生成された観測情報を用いて前記慣性航法部の算出誤差の補正量をGPS可視時補正量として算出し、
航法補正部が、前記慣性航法部により算出された車両の座標値と車両の速度ベクトルとを前記カルマンフィルタにより算出されたGPS可視時補正量により補正し、
速度スカラー算出部が、前記車速検出装置により検出された車速値に基づいて車両の速度スカラーを算出し、
横滑り角算出部が、GPS衛星の可視時に前記速度スカラー算出部により算出された速度スカラーと前記航法補正部により補正された速度ベクトルの左右方向成分とに基づいて車両の横滑り角を算出し、
横滑り角蓄積部が、前記横滑り角算出部により算出された横滑り角と前記慣性装置により検出された加速度ベクトルの左右方向成分とを対応づけて蓄積し、
コーナリングパワー算出部が、前記横滑り角蓄積部に蓄積された横滑り角に基づいて車両の加速度ベクトルの左右方向成分と横滑り角との関係値をコーナリングパワーとして算出し、
速度ベクトル算出部が、GPS衛星が不可視であるGPS不可視時点に前記速度スカラー算出部により算出された速度スカラーと前記慣性装置により前記GPS不可視時点に検出された加速度ベクトルの左右方向成分と前記コーナリングパワー算出部により算出されたコーナリングパワーとに基づいて車両の速度ベクトルを算出し、
速度ベクトル残差算出部が、前記慣性航法部により前記GPS不可視時点に算出された速度ベクトルと前記速度ベクトル算出部により算出された速度ベクトルとの差を速度ベクトル残差として算出し、
前記カルマンフィルタが、前記速度ベクトル残差算出部により算出された速度ベクトル残差を用いて前記慣性航法部の算出誤差の補正量をGPS不可視時補正量として算出し、
前記航法補正部が、GPS衛星の可視時に前記慣性航法部により算出された車両の座標値を前記GPS可視時補正量により補正することにより車両の座標値を標定し、GPS衛星の不可視時に前記慣性航法部により算出された車両の座標値を前記GPS不可視時補正量により補正することにより車両の座標値を標定する
ことを特徴とする位置標定方法。
【請求項8】
請求項7記載の位置標定方法をコンピュータに実行させる位置標定プログラム。
【請求項9】
GPS衛星(GPS:Global Positioning System)から発信される搬送波を観測するGPS受信機と加速度ベクトルを検出する慣性装置と車速値を検出する車速検出装置とが設置された車両の速度ベクトルを算出する速度ベクトル算出装置において、
GPS衛星の可視時に前記GPS受信機により取得された観測値を利用して車両の速度ベクトルを算出する第1の速度ベクトル算出部と、
前記車速検出装置により検出された車速値に基づいて車両の速度スカラーを算出する速度スカラー算出部と、
GPS衛星の可視時に前記速度スカラー算出部により算出された速度スカラーと前記第1の速度ベクトル算出部により算出された速度ベクトルの左右方向成分とに基づいて車両の横滑り角を算出する横滑り角算出部と、
前記横滑り角算出部により算出された横滑り角と前記慣性装置により検出された加速度ベクトルの左右方向成分とを対応づけて蓄積する横滑り角蓄積部と、
前記横滑り角蓄積部に蓄積された横滑り角に基づいて車両の加速度ベクトルの左右方向成分と横滑り角との関係値をコーナリングパワーとして算出するコーナリングパワー算出部と、
GPS衛星が不可視であるGPS不可視時点に前記速度スカラー算出部により算出された速度スカラーと前記慣性装置により前記GPS不可視時点に検出された加速度ベクトルの左右方向成分と前記コーナリングパワー算出部により算出されたコーナリングパワーとに基づいて車両の速度ベクトルを算出する第2の速度ベクトル算出部と
を備えることを特徴とする速度ベクトル算出装置。
【請求項10】
GPS衛星(GPS:Global Positioning System)から発信される搬送波を観測するGPS受信機と加速度ベクトルを検出する慣性装置と車速値を検出する車速検出装置とが設置された車両の速度ベクトルを算出する速度ベクトル算出方法において、
第1の速度ベクトル算出部が、GPS衛星の可視時に前記GPS受信機により取得された観測値を利用して車両の速度ベクトルを算出し、
速度スカラー算出部が、前記車速検出装置により検出された車速値に基づいて車両の速度スカラーを算出し、
横滑り角算出部が、GPS衛星の可視時に前記速度スカラー算出部により算出された速度スカラーと前記第1の速度ベクトル算出部により算出された速度ベクトルの左右方向成分とに基づいて車両の横滑り角を算出し、
横滑り角蓄積部が、前記横滑り角算出部により算出された横滑り角と前記慣性装置により検出された加速度ベクトルの左右方向成分とを対応づけて蓄積し、
コーナリングパワー算出部が、前記横滑り角蓄積部に蓄積された横滑り角に基づいて車両の加速度ベクトルの左右方向成分と横滑り角との関係値をコーナリングパワーとして算出し、
第2の速度ベクトル算出部が、GPS衛星が不可視であるGPS不可視時点に前記速度スカラー算出部により算出された速度スカラーと前記慣性装置により前記GPS不可視時点に検出された加速度ベクトルの左右方向成分と前記コーナリングパワー算出部により算出されたコーナリングパワーとに基づいて車両の速度ベクトルを算出する
ことを特徴とする速度ベクトル算出方法。
【請求項11】
請求項10記載の速度ベクトル算出方法をコンピュータに実行させる速度ベクトル算出プログラム。
【請求項1】
GPS衛星(GPS:Global Positioning System)から発信される搬送波を観測するGPS受信機と加速度ベクトルを検出する慣性装置と車速値を検出する車速検出装置とが設置された車両の座標値を標定する位置標定装置において、
前記慣性装置により検出された加速度ベクトルに基づいて車両の座標値と車両の速度ベクトルとを算出する慣性航法部と、
GPS衛星の可視時に前記GPS受信機により取得された観測値に基づいて所定の情報を観測情報として生成する観測情報生成部と、
前記観測情報生成部により生成された観測情報を用いて前記慣性航法部の算出誤差の補正量をGPS可視時補正量として算出するカルマンフィルタと、
前記慣性航法部により算出された車両の座標値と車両の速度ベクトルとを前記カルマンフィルタにより算出されたGPS可視時補正量により補正する航法補正部と、
前記車速検出装置により検出された車速値に基づいて車両の速度スカラーを算出する速度スカラー算出部と、
GPS衛星の可視時に前記速度スカラー算出部により算出された速度スカラーと前記航法補正部により補正された速度ベクトルの左右方向成分とに基づいて車両の横滑り角を算出する横滑り角算出部と、
前記横滑り角算出部により算出された横滑り角と前記慣性装置により検出された加速度ベクトルの左右方向成分とを対応づけて蓄積する横滑り角蓄積部と、
前記横滑り角蓄積部に蓄積された横滑り角に基づいて車両の加速度ベクトルの左右方向成分と横滑り角との関係値をコーナリングパワーとして算出するコーナリングパワー算出部と、
GPS衛星が不可視であるGPS不可視時点に前記速度スカラー算出部により算出された速度スカラーと前記慣性装置により前記GPS不可視時点に検出された加速度ベクトルの左右方向成分と前記コーナリングパワー算出部により算出されたコーナリングパワーとに基づいて車両の速度ベクトルを算出する速度ベクトル算出部と、
前記慣性航法部により前記GPS不可視時点に算出された速度ベクトルと前記速度ベクトル算出部により算出された速度ベクトルとの差を速度ベクトル残差として算出する速度ベクトル残差算出部とを備え、
前記カルマンフィルタは、前記速度ベクトル残差算出部により算出された速度ベクトル残差を用いて前記慣性航法部の算出誤差の補正量をGPS不可視時補正量として算出し、
前記航法補正部は、GPS衛星の可視時に前記慣性航法部により算出された車両の座標値を前記GPS可視時補正量により補正することにより車両の座標値を標定し、GPS衛星の不可視時に前記慣性航法部により算出された車両の座標値を前記GPS不可視時補正量により補正することにより車両の座標値を標定する
ことを特徴とする位置標定装置。
【請求項2】
前記カルマンフィルタで用いる観測ノイズ行列が、速度ベクトルの前後方向成分に対応する行と速度ベクトルの左右方向に対応する行と速度ベクトルの上下方向成分に対応する行とで値が異なる
ことを特徴とする請求項1記載の位置標定装置。
【請求項3】
前記カルマンフィルタで用いる観測ノイズ行列において速度ベクトルの左右方向に対応する行の値が車両の加速度ベクトルの左右方向成分に応じて変化する
ことを特徴とする請求項1または請求項2記載の位置標定装置。
【請求項4】
前記カルマンフィルタで用いる観測ノイズ行列において速度ベクトルの前後方向成分に対応する行と速度ベクトルの左右方向に対応する行と速度ベクトルの上下方向成分に対応する行とのそれぞれの値が車両の速度スカラーに応じて変化する
ことを特徴とする請求項1〜請求項3いずれかに記載の位置標定装置。
【請求項5】
前記カルマンフィルタは、前記慣性装置の検出誤差の補正量を慣性誤差補正量として算出し、
前記位置標定装置は、さらに、
前記慣性装置により検出された加速度ベクトルを前記カルマンフィルタにより算出された慣性誤差補正量により補正する慣性誤差補正部を備え、
前記慣性航法部は、前記慣性誤差補正部により補正された加速度ベクトルに基づいて車両の座標値と車両の速度ベクトルとを算出する
ことを特徴とする請求項1〜請求項4いずれかに記載の位置標定装置。
【請求項6】
前記観測情報生成部は、前記GPS受信機により観測値として取得された搬送波位相に基づいて搬送波位相の二重差の残差を観測情報として算出する
ことを特徴とする請求項1〜請求項5いずれかに記載の位置標定装置。
【請求項7】
GPS衛星(GPS:Global Positioning System)から発信される搬送波を観測するGPS受信機と加速度ベクトルを検出する慣性装置と車速値を検出する車速検出装置とが設置された車両の座標値を標定する位置標定方法において、
慣性航法部が、前記慣性装置により検出された加速度ベクトルに基づいて車両の座標値と車両の速度ベクトルとを算出し、
観測情報生成部が、GPS衛星の可視時に前記GPS受信機により取得された観測値に基づいて所定の情報を観測情報として生成し、
カルマンフィルタが、前記観測情報生成部により生成された観測情報を用いて前記慣性航法部の算出誤差の補正量をGPS可視時補正量として算出し、
航法補正部が、前記慣性航法部により算出された車両の座標値と車両の速度ベクトルとを前記カルマンフィルタにより算出されたGPS可視時補正量により補正し、
速度スカラー算出部が、前記車速検出装置により検出された車速値に基づいて車両の速度スカラーを算出し、
横滑り角算出部が、GPS衛星の可視時に前記速度スカラー算出部により算出された速度スカラーと前記航法補正部により補正された速度ベクトルの左右方向成分とに基づいて車両の横滑り角を算出し、
横滑り角蓄積部が、前記横滑り角算出部により算出された横滑り角と前記慣性装置により検出された加速度ベクトルの左右方向成分とを対応づけて蓄積し、
コーナリングパワー算出部が、前記横滑り角蓄積部に蓄積された横滑り角に基づいて車両の加速度ベクトルの左右方向成分と横滑り角との関係値をコーナリングパワーとして算出し、
速度ベクトル算出部が、GPS衛星が不可視であるGPS不可視時点に前記速度スカラー算出部により算出された速度スカラーと前記慣性装置により前記GPS不可視時点に検出された加速度ベクトルの左右方向成分と前記コーナリングパワー算出部により算出されたコーナリングパワーとに基づいて車両の速度ベクトルを算出し、
速度ベクトル残差算出部が、前記慣性航法部により前記GPS不可視時点に算出された速度ベクトルと前記速度ベクトル算出部により算出された速度ベクトルとの差を速度ベクトル残差として算出し、
前記カルマンフィルタが、前記速度ベクトル残差算出部により算出された速度ベクトル残差を用いて前記慣性航法部の算出誤差の補正量をGPS不可視時補正量として算出し、
前記航法補正部が、GPS衛星の可視時に前記慣性航法部により算出された車両の座標値を前記GPS可視時補正量により補正することにより車両の座標値を標定し、GPS衛星の不可視時に前記慣性航法部により算出された車両の座標値を前記GPS不可視時補正量により補正することにより車両の座標値を標定する
ことを特徴とする位置標定方法。
【請求項8】
請求項7記載の位置標定方法をコンピュータに実行させる位置標定プログラム。
【請求項9】
GPS衛星(GPS:Global Positioning System)から発信される搬送波を観測するGPS受信機と加速度ベクトルを検出する慣性装置と車速値を検出する車速検出装置とが設置された車両の速度ベクトルを算出する速度ベクトル算出装置において、
GPS衛星の可視時に前記GPS受信機により取得された観測値を利用して車両の速度ベクトルを算出する第1の速度ベクトル算出部と、
前記車速検出装置により検出された車速値に基づいて車両の速度スカラーを算出する速度スカラー算出部と、
GPS衛星の可視時に前記速度スカラー算出部により算出された速度スカラーと前記第1の速度ベクトル算出部により算出された速度ベクトルの左右方向成分とに基づいて車両の横滑り角を算出する横滑り角算出部と、
前記横滑り角算出部により算出された横滑り角と前記慣性装置により検出された加速度ベクトルの左右方向成分とを対応づけて蓄積する横滑り角蓄積部と、
前記横滑り角蓄積部に蓄積された横滑り角に基づいて車両の加速度ベクトルの左右方向成分と横滑り角との関係値をコーナリングパワーとして算出するコーナリングパワー算出部と、
GPS衛星が不可視であるGPS不可視時点に前記速度スカラー算出部により算出された速度スカラーと前記慣性装置により前記GPS不可視時点に検出された加速度ベクトルの左右方向成分と前記コーナリングパワー算出部により算出されたコーナリングパワーとに基づいて車両の速度ベクトルを算出する第2の速度ベクトル算出部と
を備えることを特徴とする速度ベクトル算出装置。
【請求項10】
GPS衛星(GPS:Global Positioning System)から発信される搬送波を観測するGPS受信機と加速度ベクトルを検出する慣性装置と車速値を検出する車速検出装置とが設置された車両の速度ベクトルを算出する速度ベクトル算出方法において、
第1の速度ベクトル算出部が、GPS衛星の可視時に前記GPS受信機により取得された観測値を利用して車両の速度ベクトルを算出し、
速度スカラー算出部が、前記車速検出装置により検出された車速値に基づいて車両の速度スカラーを算出し、
横滑り角算出部が、GPS衛星の可視時に前記速度スカラー算出部により算出された速度スカラーと前記第1の速度ベクトル算出部により算出された速度ベクトルの左右方向成分とに基づいて車両の横滑り角を算出し、
横滑り角蓄積部が、前記横滑り角算出部により算出された横滑り角と前記慣性装置により検出された加速度ベクトルの左右方向成分とを対応づけて蓄積し、
コーナリングパワー算出部が、前記横滑り角蓄積部に蓄積された横滑り角に基づいて車両の加速度ベクトルの左右方向成分と横滑り角との関係値をコーナリングパワーとして算出し、
第2の速度ベクトル算出部が、GPS衛星が不可視であるGPS不可視時点に前記速度スカラー算出部により算出された速度スカラーと前記慣性装置により前記GPS不可視時点に検出された加速度ベクトルの左右方向成分と前記コーナリングパワー算出部により算出されたコーナリングパワーとに基づいて車両の速度ベクトルを算出する
ことを特徴とする速度ベクトル算出方法。
【請求項11】
請求項10記載の速度ベクトル算出方法をコンピュータに実行させる速度ベクトル算出プログラム。
【図1】


【図2】

【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】

【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−122921(P2011−122921A)
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願番号】特願2009−280370(P2009−280370)
【出願日】平成21年12月10日(2009.12.10)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願日】平成21年12月10日(2009.12.10)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]