
位置標定装置、位置標定方法および位置標定プログラム
【課題】GPS衛星が不可視である場所についても測量を行わずに高い精度で測位結果を得られるようにすることを目的とする。
【解決手段】交差箇所特定部120は普通道路の交差箇所の画像(参照画像)と高架下道路の交差箇所の画像(対象画像)を特定する。交差箇所点群表示部130は、参照画像に普通道路で取得されたレーザ点群(参照点群)を重畳して表示し、対象画像に高架下道路で取得されたレーザ点群(対象点群)を重畳して表示する。ランドマーク点特定部140は、参照画像と対象画像とに共通して映っているランドマークに重畳するランドマーク参照点とランドマーク対象点とを特定する。交差箇所座標値算出部150は、ランドマーク参照点の三次元座標値とランドマーク対象点の距離方位とに基づいて交差箇所座標値を算出する。高架下位置標定部160は、交差箇所座標値と慣性データ194とに基づいて高架下道路の走行位置を標定する。
【解決手段】交差箇所特定部120は普通道路の交差箇所の画像(参照画像)と高架下道路の交差箇所の画像(対象画像)を特定する。交差箇所点群表示部130は、参照画像に普通道路で取得されたレーザ点群(参照点群)を重畳して表示し、対象画像に高架下道路で取得されたレーザ点群(対象点群)を重畳して表示する。ランドマーク点特定部140は、参照画像と対象画像とに共通して映っているランドマークに重畳するランドマーク参照点とランドマーク対象点とを特定する。交差箇所座標値算出部150は、ランドマーク参照点の三次元座標値とランドマーク対象点の距離方位とに基づいて交差箇所座標値を算出する。高架下位置標定部160は、交差箇所座標値と慣性データ194とに基づいて高架下道路の走行位置を標定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、高架下の道路を走行する車両の位置を標定する位置標定装置、位置標定方法および位置標定プログラムに関するものである。
【背景技術】
【0002】
GPS(Global Positioning System)を利用する地上航法装置は、その特性上、慣性航法装置と組み合わせて利用される。例えば、車両を測位する地上航法装置では慣性航法装置とオドメトリとが組み合わせて利用される。
しかし、慣性航法装置にはバイアスとスケールファクタ誤差が、オドメトリにはスケールファクタ誤差とオフセット誤差とが存在する。また、これらの誤差はGPSが使用できる時間が十分にあれば複合フィルタによって推定・補正することができるが、長時間のGPS衛星不可視状態では時間と走行距離に比例して大きくなってしまう。
【0003】
そこで、近年、座標値が予め分かっている地物をランドマークとして使用し、ランドマークの座標値を用いて測位対象(例えば、車両)の位置を補正する技術が知られている。
しかし、ランドマークの座標値を得るためにトータルステーションなどを用いて測量を行うとコストや手間がかかる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−264983号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、例えば、GPS衛星が不可視である場所についても測量を行わずに高い精度で測位結果を得られるようにすることを目的とする。
【課題を解決するための手段】
【0006】
本発明の位置標定装置は、
測位衛星から測位信号を受信して受信結果を衛星観測データとして取得する受信機と、画像を撮像して撮像した画像を表す画像データを取得するカメラと、複数の計測点それぞれに対して距離と方位とを示す距離方位を計測して計測した複数の距離方位を示すデータを距離方位点群データとして取得するレーザレーダと、慣性測位に用いる慣性データを取得する慣性センサとを備える計測車両が走行した位置を標定する。
前記位置標定装置は、
前記計測車両により第一の道路で取得された画像データを記憶し、前記計測車両により前記第一の道路で取得された距離方位点群データに基づく参照点群データであって距離方位点群データに示される複数の距離方位に対応する複数の三次元座標値を示す参照点群データを記憶する参照データ記憶部と、
前記計測車両により第二の道路で取得された画像データと慣性データとを記憶し、前記計測車両により前記第二の道路で取得された距離方位点群データに基づく対象点群データであって距離方位点群データに示される複数の距離方位に対応する複数の三次元座標値を示す対象点群データを記憶する対象データ記憶部と、
前記参照データ記憶部に記憶される画像データに基づいて前記第一の道路と前記第二の道路とが交わる交差箇所で撮像された画像を参照画像として表示し、前記参照データ記憶部に記憶される参照点群データに基づいて複数の三次元座標値に対応する複数の計測点を複数の参照点として前記参照画像に重ねて表示し、前記対象データ記憶部に記憶される画像データに基づいて前記交差箇所で撮像された画像を対象画像として表示し、前記対象データ記憶部に記憶される対象点群データに基づいて複数の三次元座標値に対応する複数の計測点を複数の対象点として前記対象画像に重ねて表示する交差箇所点群表示部と、
前記交差箇所点群表示部により表示された複数の参照点のうち前記参照画像に特定の地物として映るランドマークに重ねて表示された参照点をランドマーク参照点として特定し、前記交差箇所点群表示部により表示された複数の対象点のうち前記対象画像内の前記ランドマークに重ねて表示された対象点をランドマーク対象点として特定するランドマーク点特定部と、
前記ランドマーク参照点に対応する三次元座標値と前記ランドマーク対象点に対応する距離方位とに基づいて、前記ランドマーク対象点に対応する距離方位を計測したときの前記計測車両の三次元座標値を交差箇所座標値として算出する交差箇所座標値算出部と、
前記交差箇所座標値算出部により算出された交差箇所座標値と前記対象データ記憶部に記憶される慣性データとを用いて慣性測位を行って前記計測車両が走行した前記第二の道路内の位置を前記第二の道路の走行位置として標定する位置標定部とを備える。
【発明の効果】
【0007】
本発明によれば、例えば、GPS衛星が不可視である場所(衛星不可視道路)についても測量を行わずに高い精度で測位結果を得ることができる。
【図面の簡単な説明】
【0008】
【図1】実施の形態1における位置標定装置100の機能構成図。
【図2】実施の形態1における計測車両200の外観図。
【図3】実施の形態1における計測車両200の走行経路を示す平面図。
【図4】実施の形態1における計測車両200の走行経路を示す側面図。
【図5】実施の形態1における位置標定装置100の位置標定方法を示すフローチャート。
【図6】実施の形態1における計測車両200の走行位置と計測点と距離方位との関係図。
【図7】実施の形態1における三次元点群の表示方法を示す図。
【図8】実施の形態1における交差箇所指定画面300を示す図。
【図9】実施の形態1におけるランドマーク点指定画面310を示す図。
【図10】実施の形態1におけるランドマーク参照点とランドマーク対象点と計測車両200の走行位置との関係図。
【図11】実施の形態1における位置標定装置100のハードウェア資源の一例を示す図。
【図12】実施の形態2における位置標定装置100の機能構成図。
【図13】実施の形態2における位置標定装置100の位置標定方法を示すフローチャート。
【図14】実施の形態3における計測車両200の走行経路を示す平面図。
【図15】実施の形態3における計測車両200の走行経路を示す平面図。
【図16】実施の形態3における走行経路標定方法を示すフローチャート。
【図17】実施の形態3における走行経路標定方法の効果を示す図。
【発明を実施するための形態】
【0009】
実施の形態1.
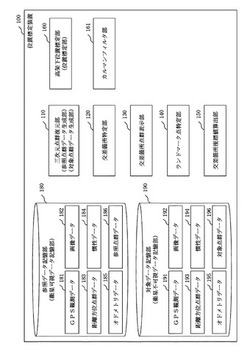
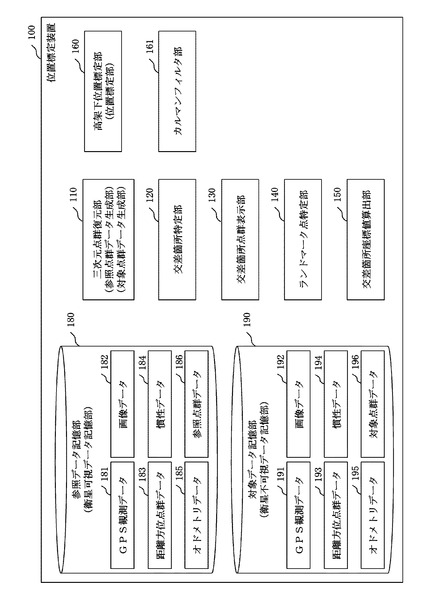
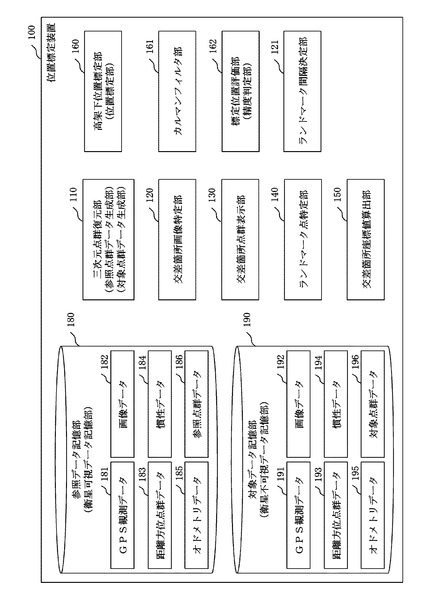
図1は、実施の形態1における位置標定装置100の機能構成図である。
実施の形態1における位置標定装置100の機能構成について、図1に基づいて以下に説明する。
【0010】
位置標定装置100は、後述する計測車両200が走行した位置を標定する。
後述するように、計測車両200は、GPS受信機、カメラ、レーザレーダ、慣性計測装置およびオドメトリを備える。
GPS受信機(受信機の一例)は、GPS衛星(測位衛星の一例)から測位信号を受信して受信結果をGPS観測データ181(衛星観測データの一例)として取得する。
カメラは、画像を撮像して撮像した画像を表す画像データ182を取得する。
レーザレーダは、複数の計測点それぞれに対して距離と方位とを示す距離方位を計測して計測した複数の距離方位を示すデータを距離方位点群データ183として取得する。
慣性計測装置(慣性センサの一例)は、慣性測位に用いる慣性データ184を取得する。
【0011】
位置標定装置100は、三次元点群復元部110、交差箇所特定部120、交差箇所点群表示部130、ランドマーク点特定部140、交差箇所座標値算出部150、高架下位置標定部160およびカルマンフィルタ部161を備える。
さらに、位置標定装置100は、参照データ記憶部180と対象データ記憶部190とを備える。
【0012】
参照データ記憶部180(衛星可視データ記憶部の一例)は、高架下の道路と、高架下の道路と交わる非高架下の道路とのうち、非高架下の道路を走行した計測車両200により取得されるGPS観測データ181、画像データ182、距離方位点群データ183、慣性データ184およびオドメトリデータ185を記憶する。
また、衛星可視データ記憶部180は、三次元点群復元部110により生成される参照点群データ186を記憶する。
参照データ記憶部180は、複数の非高架下の道路それぞれについて上記の各種データを記憶する。
高架下の道路はGPS衛星を遮蔽する遮蔽物が存在する衛星不可視道路の一例であり、非高架下の道路はGPS衛星を遮蔽する遮蔽物が存在しない衛星可視道路の一例である。
【0013】
以下、非高架下の道路を「普通道路」という。
【0014】
対象データ記憶部190(衛星不可視データ記憶部の一例)は、高架下の道路を走行した計測車両200により取得されるGPS観測データ191、画像データ192、距離方位点群データ193、慣性データ194およびオドメトリデータ195を記憶する。
また、対象データ記憶部190は、三次元点群復元部110により生成される対象点群データ196を記憶する。
【0015】
三次元点群復元部110(参照点群データ生成部、対象点群データ生成部の一例)は、普通道路(非高架下の道路)のGPS観測データ181に基づいて計測車両200が走行した普通道路内の位置を普通道路の走行位置として測位する。
三次元点群復元部110は、測位した普通道路の走行位置に基づいて普通道路の距離方位点群データ183に示される複数の距離方位に対応する複数の計測点それぞれの三次元座標値を算出する。
三次元点群復元部110は、算出した複数の三次元座標値を示すデータを参照点群データ186として生成する。
【0016】
三次元点群復元部110は、高架下道路の慣性データ194に基づいて計測車両200が走行した高架下道路内の位置を高架下道路の走行位置として測位する。
三次元点群復元部110は、測位した高架下道路の走行位置に基づいて高架下道路の距離方位点群データ193に示される複数の距離方位に対応する複数の計測点それぞれの三次元座標値を算出する。
三次元点群復元部110は、算出した複数の三次元座標値を示すデータを対象点群データ196として生成する。
【0017】
交差箇所特定部120は、高架下道路と普通道路との交差箇所を特定し、交差箇所で撮像された画像を表す画像データ182、192を特定する。
【0018】
交差箇所点群表示部130は、高架下道路と普通道路との交差箇所で撮像された画像を表す普通道路の画像データ182を参照データ記憶部180から取得し、取得した普通道路の画像データ182に基づいて交差箇所の画像を参照画像として表示する。
交差箇所点群表示部130は、参照点群データ186に示される複数の三次元座標値に対応する複数の計測点を複数の参照点として参照画像に重ねて表示する。
【0019】
交差箇所点群表示部130は、交差箇所で撮像された画像を表す高架下道路の画像データ192を対象データ記憶部190から取得し、取得した高架下道路の画像データ192に基づいて交差箇所の画像を対象画像として表示する。
交差箇所点群表示部130は、対象点群データ196に示される複数の三次元座標値に対応する複数の計測点を複数の対象点として対象画像に重ねて表示する。
【0020】
ランドマーク点特定部140は、交差箇所点群表示部130により表示された複数の参照点のうち参照画像に特定の地物として映るランドマークに重ねて表示された参照点をランドマーク参照点として特定する。
ランドマーク点特定部140は、交差箇所点群表示部130により表示された複数の対象点のうち対象画像内のランドマークに重ねて表示された対象点をランドマーク対象点として特定する。
【0021】
例えば、ランドマーク点特定部140は、複数の普通道路と高架下道路との交差箇所毎に交差箇所にあるランドマークのランドマーク参照点とランドマーク対象点とを特定する。
【0022】
交差箇所座標値算出部150は、ランドマーク参照点に対応する三次元座標値とランドマーク対象点に対応する距離方位とに基づいて、ランドマーク対象点に対応する距離方位が計測されたときに計測車両200が位置していた地点の三次元座標値を交差箇所座標値として算出する。
【0023】
例えば、交差箇所座標値算出部150は、交差箇所毎に特定されたランドマーク参照点とランドマーク対象点とに基づいて交差箇所毎に交差箇所座標値を算出する。
【0024】
高架下位置標定部160(位置標定部の一例)は、交差箇所座標値算出部150により算出された交差箇所座標値と高架下道路の慣性データ194とに基づいて、計測車両200が走行した高架下道路内の位置を高架下道路の走行位置として標定する。
【0025】
例えば、高架下位置標定部160は、高架下道路を交差箇所毎に区分けした高架下道路の区間毎に、交差箇所に対応する交差箇所座標値と高架下道路の当該区間で取得された慣性データ194とに基づいて高架下道路の走行位置を標定する。
【0026】
カルマンフィルタ部161は慣性測位の誤差を推定する。カルマンフィルタ部161により推定された慣性測位の誤差は、慣性測位において誤差補正量とし用いられる。
【0027】
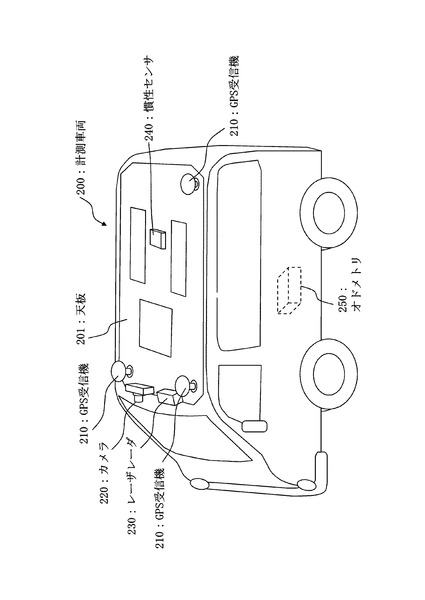
図2は、実施の形態1における計測車両200の外観図である。
実施の形態1における計測車両200について、図2に基づいて以下に説明する。
【0028】
計測車両200は天板201を備え、天板201にはGPS受信機210、カメラ220、レーザレーダ230および慣性計測装置240が設置されている。
また、計測車両200はオドメトリ250を備える。
【0029】
GPS受信機210は、天板201に1台または複数台が設置される。
GPS受信機210は、各時刻に複数のGPS衛星それぞれから測位信号(搬送波)を受信し、測位信号の受信結果を示すデータをGPS観測データとして生成する。
GPS観測データには、測位信号を受信した受信時刻(取得時刻)毎に搬送波位相や航法メッセージなどが設定されている。
【0030】
カメラ220は、各時刻に計測車両200の前後方向(または計測車両200の左右方向)を撮像し、撮像して得られた画像を表すデータを画像データとして生成する。
画像データは撮像時刻(取得時刻)に対応付けられている。
【0031】
レーザレーダ230(LRF:Laser Range Finder)は、斜め上向き(または斜め下向き)に設置され、計測車両200の左右方向に首振りしながらレーザ光を発射し、発射方向に位置する地物に反射したレーザ光を受光する。
レーザレーダ230は、レーザ光の発射方向(方位)とレーザ光を発射してから受光するまでの時間から求まる地物までの距離とを距離方位として算出し、算出した距離方位を示すデータを距離方位点群データとして生成する。
距離方位点群データには、レーザ光の発射時刻または受信時刻(取得時刻)毎に距離方位が設定されている。
以下、距離方位点群データに示される距離方位を「距離方位点」として説明する。
【0032】
慣性計測装置240(IMU:Inertial Measurement Unit)は、ジャイロセンサと加速度センサとで構成される。ジャイロセンサは計測車両200の3軸方向xyzそれぞれの角速度を検出し、加速度センサは計測車両200の3軸方向xyzそれぞれの加速度を検出する。
慣性計測装置240は、計測車両200の3軸方向xyzそれぞれの角速度と加速度とを示すデータを慣性データとして生成する。
慣性データには、検出時刻(取得時刻)毎に角速度と加速度とが設定されている。
【0033】
オドメトリ250は、計測車両200の速度を表す車速パルスを検出し、車速パルスの検出結果(例えば、単位時間当たりのタイヤの回転数)を示すデータをオドメトリデータとして生成する。
オドメトリデータには、検出時刻(取得時刻)毎に車速パルスの検出結果が設定されている。
【0034】
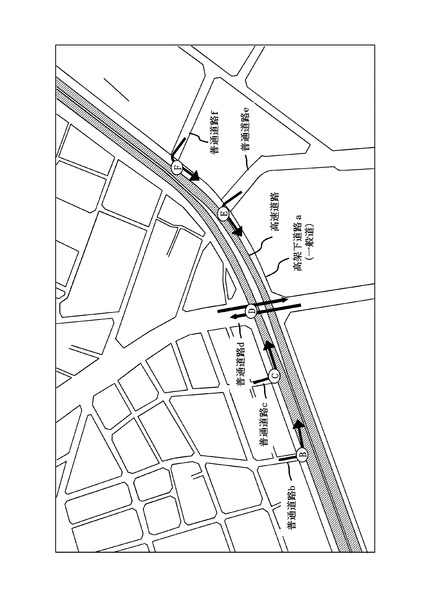
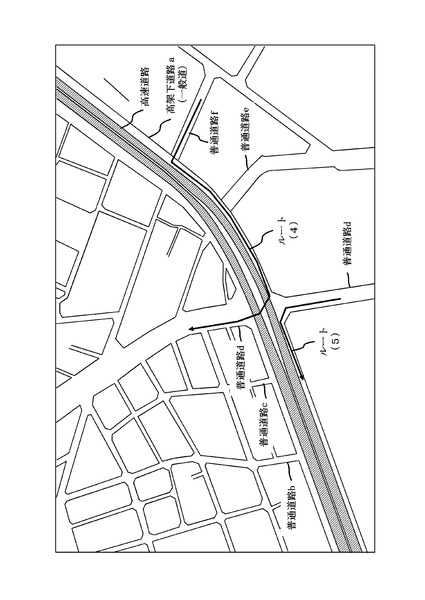
図3は、実施の形態1における計測車両200の走行経路を示す平面図である。
図4は、実施の形態1における計測車両200の走行経路を示す側面図である。
【0035】
計測車両200は、図3、図4に示すように高速道路の下を通る一般道aを走行する(図4の点線矢印)。
高速道路の下を通る一般道ではGPS衛星からの測位信号が高速道路により遮られるため、計測車両200は測位信号を正しく受信できず、不十分なGPS観測データ191しか得られない。
【0036】
計測車両200は、さらに高速道路下の一般道と交わる道路b〜fを走行する(図3の矢印)。
高速道路下の一般道と交わる道路ではGPS衛星からの測位信号が高速道路下を除いて高速道路により遮られないため、計測車両200は測位信号を正しく受信でき、十分なGPS観測データ181を得られる。
【0037】
以下、高速道路の下を通る一般道aを「高架下道路」といい、高速道路下の一般道と交わる道路b〜fを「普通道路」という。
【0038】
計測車両200が高架下道路aを走行したときに取得された各種データを位置標定装置100の参照データ記憶部180に記憶する。
また、計測車両200が普通道路b〜fを走行したときに取得された各種データを位置標定装置100の対象データ記憶部190に記憶する。各種データは道路毎(または経路毎)に記憶しておくものとする。
【0039】
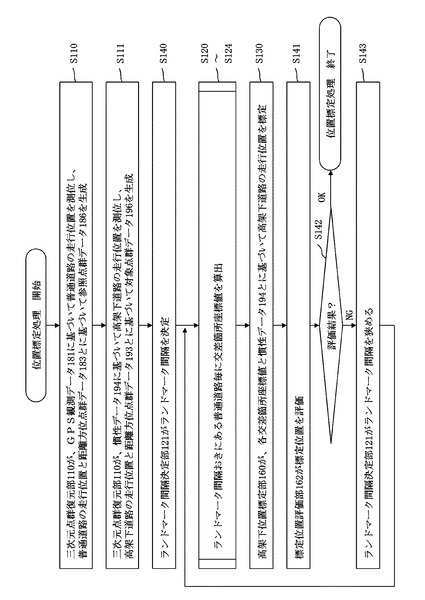
図5は、実施の形態1における位置標定装置100の位置標定方法を示すフローチャートである。
実施の形態1における位置標定装置100の位置標定方法について、図5に基づいて以下に説明する。
【0040】
まず、位置標定方法の概要について説明する。
【0041】
三次元点群復元部110は、GPS観測データ181に基づいて普通道路の走行位置を測位し、普通道路の走行位置と距離方位点群データ183とに基づいて各距離方位点の三次元座標値を示す参照点群データ186を生成する(S110)。
三次元点群復元部110は、慣性データ194に基づいて高架下道路の走行位置を測位し、高架下道路の走行位置と距離方位点群データ193とに基づいて各距離方位点の三次元座標値を示す対象点群データ196を生成する(S111)。
【0042】
交差箇所特定部120は普通道路を一つ選択し、普通道路の交差箇所の画像(参照画像)と高架下道路の交差箇所の画像(対象画像)とを特定する(S120)。
交差箇所点群表示部130は、参照画像に参照点群を重畳して表示し、対象画像に対象点群を重畳して表示する(S121)。
ランドマーク点特定部140は、参照画像と対象画像とに共通して映っているランドマークに重畳するランドマーク参照点とランドマーク対象点とを特定する(S122)。
交差箇所座標値算出部150は、ランドマーク参照点の三次元座標値とランドマーク対象点の距離方位とに基づいて交差箇所座標値を算出する(S123)。
S120〜S123は全ての普通道路に対して実行される(S124)。
【0043】
高架下位置標定部160は、各交差箇所座標値と慣性データ194とに基づいて高架下道路の走行位置を標定する(S130)。
【0044】
次に、位置標定方法の詳細について説明する。
【0045】
S110において、三次元点群復元部110は、普通道路で取得されたGPS観測データ181を用いてGPS測位を行い、普通道路での計測車両200の走行位置を算出する。例えば、三次元点群復元部110はGPS観測データ181と慣性データ184とを用いてGPS/INS(Inertial Navigation System)複合航法(GPS測位の一例)を行う。例えば、GPS/INS複合航法において、三次元点群復元部110はGPS観測データ181に含まれる搬送波位相を用いて搬送波位相の二重位相差残差を算出する。カルマンフィルタ部161は搬送波位相の二重位相差残差を用いて慣性データ194の誤差を補正量として推定する。三次元点群復元部110は慣性データ194を補正量で補正し、補正した慣性データ194を用いてストラップダウン演算を行う。
三次元点群復元部110は、普通道路での計測車両200の走行位置と普通道路で取得された距離方位点群データ193とに基づいて、距離方位点群データ193に含まれる複数の距離方位点に対応する複数の計測点それぞれの三次元座標値を算出する。
三次元点群復元部110は、算出した複数の三次元座標値を示すデータを参照点群データ186として生成する。
【0046】
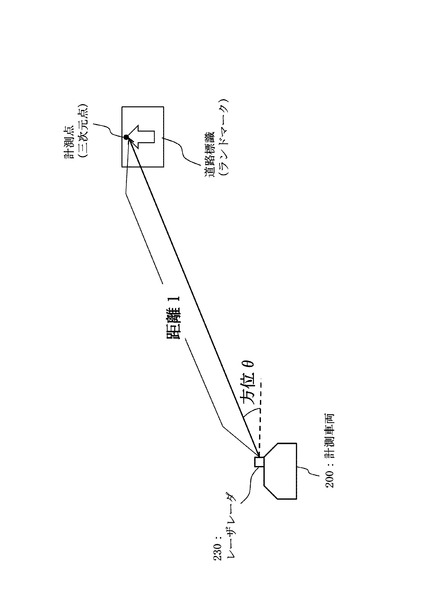
図6は、実施の形態1における計測車両200の走行位置と計測点と距離方位との関係図である。
図6において、三次元点群復元部110は、計測車両200の走行位置から方位θに距離lだけ離れた地点の三次元座標値を計測点の三次元座標値として算出する。方位θおよび距離lはレーザレーダ230により計測された値を示している。
【0047】
図5に戻り、位置標定方法の説明を続ける。
【0048】
S110において、GPS測位により計測車両200の走行位置を高い精度で求めることができるため、参照点群データ186に示される各計測点の三次元座標値の精度は高い。また、高架下道路と交わる交差箇所で一時的に測位衛星を受信できなくなっても、交差箇所の前後では測位精度(または慣性データ194の補正精度)が高いため、測位結果を補正することができる。
三次元点群復元部110は、普通道路毎に参照点群データ186を生成し、各参照点群データ186を参照データ記憶部180に記憶する。
また、三次元点群復元部110は、普通道路での計測車両200の走行位置を時刻と対応付けて参照データ記憶部180に記憶する。
以下、参照点群データ186に示される三次元座標値を「参照点(三次元点)」として説明する。
S110の後、S111に進む。
【0049】
S111において、三次元点群復元部110は、高架下道路で取得された慣性データ194を用いて慣性測位を行い、高架下道路での計測車両200の走行位置を算出する。例えば、三次元点群復元部110はオドメトリデータ195と慣性データ194とを用いてODO(ODOmetry)/INS複合航法(慣性測位の一例)を行う。例えば、ODO/INS複合航法において、三次元点群復元部110はオドメトリデータ195に基づいて速度や加速度の残差を算出する。カルマンフィルタ部161は速度や加速度の残差を用いて慣性データ194の誤差を補正量として推定する。三次元点群復元部110は慣性データ194を補正量で補正し、補正した慣性データ194を用いてストラップダウン演算を行う。
三次元点群復元部110は、S110と同様に高架下道路での計測車両200の走行位置と高架下道路で取得された距離方位点群データ183とに基づいて各計測点の三次元座標値を算出し、各計測点の三次元座標値を示す対象点群データ196を生成する。
三次元点群復元部110は、生成した対象点群データ196とを対象データ記憶部190に記憶する。
また、三次元点群復元部110は、高架下道路での計測車両200の走行位置を時刻と対応付けて対象データ記憶部190に記憶する。
以下、対象点群データ196に示される三次元座標値を「対象点(三次元点)」として説明する。
【0050】
慣性データ194が示す角速度や加速度にはジャイロセンサおよび加速度センサのバイアス誤差やスケールファクタ誤差などが含まれる。また、オドメトリデータ195が示す計測結果にはオドメトリ250のスケールファクタ誤差やオフセット誤差(タイヤの向きと進行方向との差)が含まれる。
これらの誤差が補正されなければ、慣性測位によって求まる計測車両200の走行位置は時間の経過と共にその精度が悪化する。そのため、対象点群データ196に示される各計測点の三次元座標値の精度は高くない。
【0051】
S111の後、S120に進む。
【0052】
S120において、交差箇所特定部120は複数の普通道路から普通道路を一つ選択する。以下、選択した普通道路を「選択普通道路」という。
交差箇所特定部120は、選択普通道路と高架下道路とが交差する交差箇所を特定し、交差箇所で撮像した画像を表す画像データを特定する。交差箇所の特定方法については後述する。
以下、特定した選択普通道路の画像データ182を「参照画像」として説明し、特定した高架下道路の画像データ192を「対象画像」として説明する。
S120の後、S121に進む。
【0053】
S121において、交差箇所点群表示部130は、交差箇所から所定の範囲内で取得された参照点群を参照点群データ186から抽出する。また、交差箇所点群表示部130は、交差箇所から所定の範囲内で取得された対象点群を対象点群データ196から抽出する。以下、抽出した参照点群を「抽出参照点群」といい、抽出した対象点群を「抽出対象点群」という。
交差箇所点群表示部130は、抽出参照点群を参照画像に重ねて表示し、抽出対象点群を対象画像に重ねて表示する。
S121の後、S122に進む。
【0054】
図7は、実施の形態1における三次元点群の表示方法を示す図である。
三次元点群(抽出参照点群、抽出対象点群)を画像に重ねて表示する方法について、図7に基づいて説明する。
【0055】
交差箇所点群表示部130は画像に対応する撮像面を算出する。撮像面はカメラ220から焦点距離fだけ離れた点Pにおいてカメラ220の視線方向と直交する平面である。カメラ220の座標値は計測車両200の走行位置を用いて算出する。
交差箇所点群表示部130はカメラ220と計測点(三次元点)とを結んだ直線Lを算出し、直線Lと撮像面との交点(計測点を画像に投影する点)を示すuv座標値を算出する。
交差箇所点群表示部130は、画像内のuv座標値で示される画素に計測点(三次元点)を表示する。
【0056】
図5に戻り、位置標定方法の説明を続ける。
【0057】
S122において、ランドマーク点特定部140は、参照画像に表示された抽出参照点群からランドマークに重ねて表示された抽出参照点を特定し、対象画像に表示された対象画像点群からランドマークに重ねて表示された抽出対象点を特定する。
ランドマークとは、参照画像と対象画像との両方に映っている地物(またはその一部)である。例えば、道路標識や道路標示をランドマークとして利用することができる。
以下、特定した抽出参照点を「ランドマーク参照点」といい、特定した抽出対象点を「ランドマーク対象点」という。
ランドマーク、ランドマーク参照点およびランドマーク対象点の特定方法については後述する。
S122の後、S123に進む。
【0058】
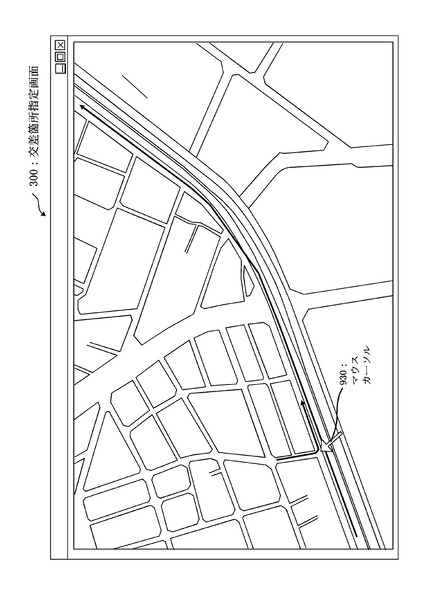
図8は、実施の形態1における交差箇所指定画面300を示す図である。
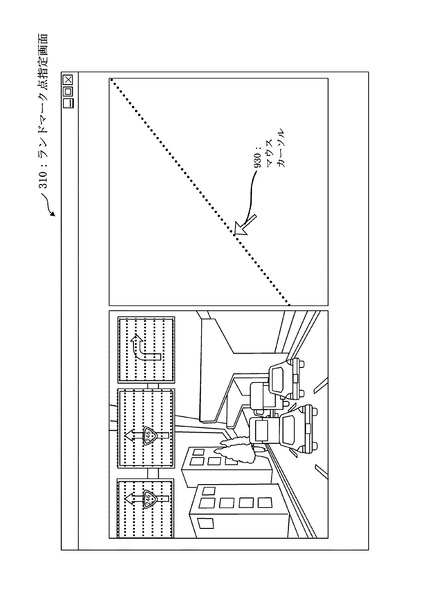
図9は、実施の形態1におけるランドマーク点指定画面310を示す図である。
S120〜S122(図5参照)の具体例について、図8および図9に基づいて説明する。
【0059】
交差箇所特定部120は、図8に示すような交差箇所指定画面300を表示装置に表示する。
交差箇所指定画面300は、選択普通道路bでの計測車両200の走行位置(S110の測位結果)と高架下道路aでの計測車両200の走行位置(S111の測位結果)とを道路地図に表示した画像を示している。
【0060】
利用者は、交差箇所指定画面300においてマウスカーソル930などを用いて交差箇所を指定する。
交差箇所特定部120は、利用者に指定された交差箇所から所定の範囲内で取得された複数の画像データ182を参照画像候補として特定する。同様に、交差箇所特定部120は対象画像候補を特定する。
【0061】
但し、交差箇所特定部120は、選択普通道路での計測車両200の走行位置と高架下道路での計測車両200の走行位置とに基づいて交差箇所の三次元座標値を算出し、算出した交差箇所の三次元座標値に基づいて参照画像候補と対象画像候補とを自動で特定しても構わない。
【0062】
交差箇所点群表示部130は、図9に示すようなランドマーク点指定画面310を表示装置に表示する。
ランドマーク点指定画面310の右側は、複数の参照画像候補または複数の対象画像候補に対応させた複数の画像点を画像を撮像した時刻の計測車両200の走行位置に基づいてプロットした画像を示している。
ランドマーク点指定画面310の左側は、画面右側で指定された参照画像候補または対象画像候補を表示している。また、画像候補に重ねて表示した点群を示している(道路標識部分以外の点群は図示省略)。
【0063】
利用者はランドマーク点指定画面310の右側で参照画像候補をマウスカーソル930を用いて選択し、交差箇所点群表示部130は選択された参照画像候補を画面の左側に表示する。
利用者は選択した参照画像候補を画面の左側で確認し、ランドマーク(図9では道路標識の矢印の先端)が最も大きく映っている参照画像候補を参照画像として指定する。同様に、利用者は参照画像と同じランドマークが映っている対象画像を指定する。
【0064】
但し、交差箇所点群表示部130は、パターンマッチングや文字認識などにより道路標識や道路標示を識別し、ランドマークが大きく映っている参照画像と対象画像とを自動で特定しても構わない。
【0065】
交差箇所点群表示部130は、参照画像の撮像位置から所定の範囲内で取得された参照点群を参照点群データ186から抽出し、抽出した参照点群(抽出参照点群)を参照画像に重ねて表示する。
【0066】
利用者は、参照画像に表示された抽出参照点群からランドマークに表示されている抽出参照点をランドマーク参照点として指定する。ランドマーク点特定部140は利用者に指定されたランドマーク参照点を特定する。
同様に、交差箇所点群表示部130は抽出対象点群を対象画像に重ねて表示し、利用者はランドマーク対象点を指定し、ランドマーク点特定部140はランドマーク対象点を特定する。
【0067】
または、利用者はランドマークが映っている画素を指定し、ランドマーク点特定部140は利用者に指定された画素の近くに表示されている抽出参照点(または抽出対象点)をランドマーク参照点(またはランドマーク対象点)として特定する。
【0068】
但し、ランドマーク点特定部140は、パターンマッチングや文字認識などによりランドマークの画素を算出し、算出したランドマークの画素の近くに表示されている抽出参照点(または抽出対象点)をランドマーク参照点(またはランドマーク対象点)として自動で特定しても構わない。
【0069】
ランドマーク点指定画面310において、抽出参照点群を重ねた参照画像と抽出対象点群を重ねた対象画像とを並べて表示しても構わない。
【0070】
図5に戻り、位置標定方法の説明を続ける。
【0071】
S123において、交差箇所座標値算出部150は、ランドマーク参照点が示す三次元座標値とランドマーク対象点に対応する距離方位点が示す距離方位とを用いて計測車両200の走行位置を算出する。算出した計測車両200の走行位置は、ランドマーク対象点に対応する距離方位点を取得したときに計測車両200が位置していた地点の三次元座標値を示す。
以下、算出した計測車両200の走行位置を「交差箇所座標値」という。
S123の後、S124に進む。
【0072】
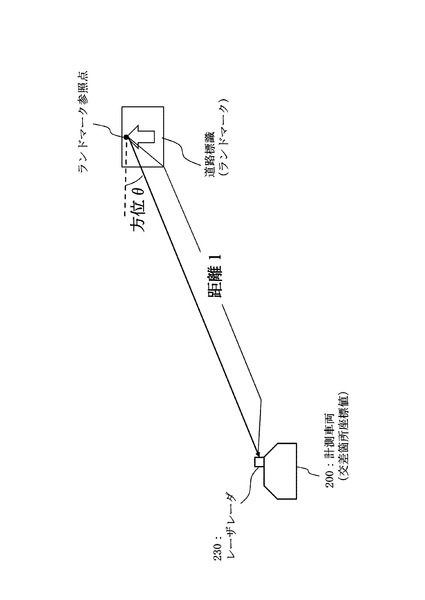
図10は、実施の形態1におけるランドマーク参照点とランドマーク対象点と計測車両200の走行位置との関係図である。
図10において、交差箇所座標値算出部150は、ランドマーク参照点から方位θに距離lだけ離れた地点の三次元座標値を交差箇所座標値として算出する。方位θおよび距離lはランドマーク対象点に対応する距離方位点の値を示している。
【0073】
図5に戻り、位置標定方法の説明を続ける。
【0074】
S124において、交差箇所特定部120は全ての普通道路(または普通道路の走行経路)を選択済みか否かを判定する。
全ての普通道路を選択済みの場合(YES)、S130に進む。
未選択の普通道路が残っている場合(NO)、S120に戻る。S120において交差箇所特定部120は未選択の普通道路を一つ選択する。そして、選択された普通道路に対してS121〜S123が実行される。
【0075】
例えば、S124までの処理により図3に示す交差箇所B〜Fにおける交差箇所座標値(B)〜(F)が算出される。
【0076】
S125において、高架下位置標定部160は、高架下道路を交差箇所毎に区分けする。
高架下位置標定部160は、高架下道路の区間毎に当該区間の交差箇所座標値と当該区間で取得された慣性データ194とを用いて慣性測位を行い、当該区間における計測車両200の走行位置を標定する。
例えば、高架下位置標定部160は図3において交差箇所座標値(B)と交差箇所Bから交差箇所Cまでの第1区間で取得された慣性データ194とを用いてODO/INS複合航法を行い、第1区間での計測車両200の走行位置を標定する。同様に、高架下位置標定部160は各交差箇所座標値と各区間の慣性データ194とを用いて区間毎に計測車両200の走行位置を標定する。
S125により、位置標定方法は終了する。
【0077】
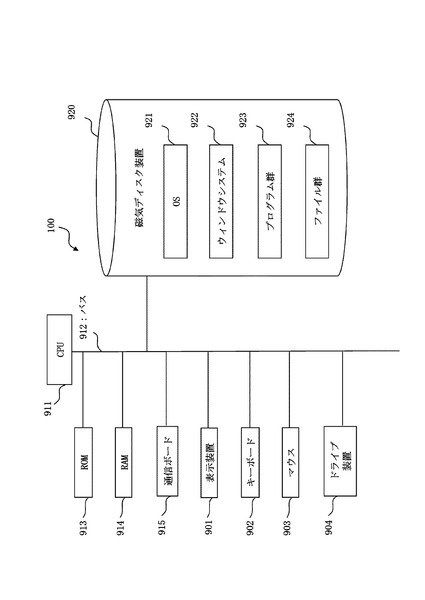
図11は、実施の形態1における位置標定装置100のハードウェア資源の一例を示す図である。
図11において、位置標定装置100は、CPU911(Central・Processing・Unit)(マイクロプロセッサ、マイクロコンピュータともいう)を備えている。CPU911は、バス912を介してROM913、RAM914、通信ボード915、表示装置901、キーボード902、マウス903、ドライブ装置904、磁気ディスク装置920と接続され、これらのハードウェアデバイスを制御する。ドライブ装置904は、FD(Flexible・Disk・Drive)、CD(Compact Disc)、DVD(Digital・Versatile・Disc)などの記憶媒体を読み書きする装置である。
【0078】
通信ボード915は、有線または無線で、LAN(Local Area Network)、インターネット、電話回線などの通信網に接続している。
【0079】
磁気ディスク装置920には、OS921(オペレーティングシステム)、ウィンドウシステム922、プログラム群923、ファイル群924が記憶されている。
【0080】
プログラム群923には、実施の形態において「〜部」として説明する機能を実行するプログラムが含まれる。プログラムは、CPU911により読み出され実行される。すなわち、プログラムは、「〜部」としてコンピュータを機能させるものであり、また「〜部」の手順や方法をコンピュータに実行させるものである。
【0081】
ファイル群924には、実施の形態において説明する「〜部」で使用される各種データ(入力、出力、判定結果、計算結果、処理結果など)が含まれる。
【0082】
実施の形態において構成図およびフローチャートに含まれている矢印は主としてデータや信号の入出力を示す。
【0083】
実施の形態において「〜部」として説明するものは「〜回路」、「〜装置」、「〜機器」であってもよく、また「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ファームウェア、ソフトウェア、ハードウェアまたはこれらの組み合わせのいずれで実装されても構わない。
【0084】
実施の形態1において、例えば、以下のような位置標定装置100について説明した。
【0085】
位置標定装置100は、マッピングカー(計測車両200)と計測データのデータベース(参照点群データ186)とランドマーク選定部(ランドマーク点特定部140)とにより構成される。
マッピングカーは、GPS/IMU、オドメトリ、カメラ、Lidar(Light Detection and Ranging)(レーザレーダ)等を搭載する。
計測データのデータベースは、計測すべき目標走行経路(高架下道路)と交差または重複するシーン(交差箇所)毎に分離された計測データを記憶する。
ランドマーク選定部は、シーン毎に計測データ中で同じランドマークを選定する。
位置標定装置100は、シーン毎に計測データ中に共通して映っている地物位置であり且つその位置誤差予測値が小さい地物をランドマークとして使用し、誤差が大きい走行経路のデータ(高架下道路での走行位置)を修正する。
本手法によれば、従来のように測量等の手法でランドマークをわざわざ計測しなくても、GPS可視性の良い走行データ(普通道路の参照点群データ186)中の地物位置をランドマークとして使用できる。つまり、既知の測量点が不要である。
また、本手法によれば、カーナビゲーションシステム(カーナビ)のデータ更新のように数年に1回は発生する業務において初回の計測データ(参照点群データ186)さえ好条件に計測できればよい。以後は、初回のデータ中の地物をランドマークとして用いることで、再現性の高い計測が可能になるからである。
【0086】
実施の形態2.
ランドマーク間隔(交差箇所の間隔)を決定し、決定したランドマーク間隔に基づいて普通道路を選択する形態について説明する。
また、計測車両200の標定位置の精度を評価し、標定位置の精度が基準を満たさない場合にランドマーク間隔を狭めて計測車両200の走行位置を新たに標定する形態について説明する。
【0087】
図12は、実施の形態2における位置標定装置100の機能構成図である。
実施の形態2における位置標定装置100の機能構成について、図12に基づいて以下に説明する。
【0088】
位置標定装置100は、実施の形態1で説明した構成(図1参照)に加えて、ランドマーク間隔決定部121と標定位置評価部162とを備える。
【0089】
ランドマーク間隔決定部121は、普通道路(衛星可視道路の一例)と高架下道路(衛星不可視道路の一例)との交差箇所の間隔をランドマーク間隔として決定する。
例えば、ランドマーク間隔決定部121は所定の初期値を1回目のランドマーク間隔とし、1回目のランドマーク間隔より小さい値を2回目のランドマーク間隔とする。
【0090】
高架下位置標定部160(位置標定部の一例)は、複数の普通道路のうち高架下道路と所定のランドマーク間隔で交わる複数の普通道路それぞれの交差箇所で高架下道路を区分けする。高架下位置標定部160は、高架下道路の区間毎に高架下道路の走行位置を標定する。
【0091】
標定位置評価部162(精度判定部の一例)は、高架下位置標定部160により標定された高架下道路の走行位置が所定の精度を有しているか否かを判定する。
【0092】
高架下位置標定部160は、標定位置評価部162により高架下道路の走行位置が所定の精度を有さないと判定された場合、複数の普通道路のうち前回のランドマーク間隔より狭い間隔で高架下道路と交わる複数の普通道路それぞれの交差箇所で高架下道路を区分けする。高架下位置標定部160は、高架下道路の区間毎に高架下道路の走行位置を標定する。
【0093】
図13は、実施の形態2における位置標定装置100の位置標定方法を示すフローチャートである。
実施の形態2における位置標定装置100の位置標定方法について、図13に基づいて以下に説明する。
【0094】
位置標定方法では、実施の形態1で説明した処理(図5参照)に加えて、S140〜S143を実行する。
以下、S140〜S143について主に説明する。
【0095】
S110〜S111において、三次元点群復元部110は、参照点群データ186と対象点群データ196とを生成する(図5参照)。
S110〜S111の後、S140に進む。
【0096】
S140において、ランドマーク間隔決定部121は、ランドマーク間隔を決定する。ランドマーク間隔は、普通道路と高架下道路との交差箇所の間隔であり、普通道路の選択に用いられる。
例えば、ランドマーク間隔決定部121は、所定の初期値(例えば、300メートル)を1回目のランドマーク間隔として設定する。
S140の後、S120〜S124に進む。
【0097】
S120〜S124において、交差箇所特定部120〜交差箇所座標値算出部150は、普通道路毎に交差箇所座標値を算出する(図5参照)。
但し、処理対象とする普通道路をランドマーク間隔に基づいて決定する。例えば、図3において普通道路b〜fそれぞれと高架下道路との交差箇所B〜Fが100メートル程度の間隔で位置し、ランドマーク間隔が「200メートル」である場合、図3において200メートル間隔で配置された普通道路b、d、fを処理対象の普通道路とする。つまり、普通道路bに対応する交差箇所座標値と普通道路dに対応する交差箇所座標値と普通道路fに対応する交差箇所座標値とを算出する。普通道路の交差箇所の間隔は予め設定されているものとする。または、S110で測位した普通道路の走行位置とS120で測位した高架下道路の走行位置とに基づいて普通道路毎に交差箇所の間隔を算出してもよい。
S120〜S124の後、S130に進む。
【0098】
S130において、高架下位置標定部160は、各交差箇所座標値と高架下道路で取得された慣性データ194とに基づいて高架下道路での計測車両200の走行位置を標定する(図5参照)。
S130の後、S141に進む。
【0099】
S141において、標定位置評価部162は、標定された計測車両200の走行位置を評価する。
例えば、S130においてODO/INS複合航法により計測車両200の走行位置が標定された場合、標定位置評価部162はODO/INS複合航法でカルマンフィルタ部161が推定した慣性データ194の誤差補正量と所定の補正量閾値とを比較する。標定位置評価部162は誤差補正量が補正量閾値より大きければ標定結果の精度が低い(NG)と判定し、誤差補正量が補正量閾値以下であれば標定結果の精度が高い(OK)と判定する。
また例えば、標定位置評価部162は、交差箇所間の走行位置の高低差が所定値より大きければ標定結果の精度が低い(NG)と判定し、交差箇所間の走行位置の高低差が所定値以下であれば標定結果の精度が高い(OK)と判定する。
S141の後、S142に進む。
【0100】
S142において、計測車両200の走行位置の評価結果が「OK」の場合、位置標定方法は終了する。
S142において、計測車両200の走行位置の評価結果が「NG」の場合、S143に進む。
【0101】
S143において、ランドマーク間隔決定部121はランドマーク間隔を狭める。
例えば、1回目のランドマーク間隔が「200メートル」である場合、ランドマーク間隔決定部121は2回目のランドマーク間隔を1回目の半分の「100メートル」にする。また例えば、ランドマーク間隔決定部121は1回目のランドマーク間隔から所定値(100メートル)を引いた「100メートル」を2回目のランドマーク間隔にする。また例えば、ランドマーク間隔決定部121は2回目のランドマーク間隔として予め定められた値を使用する。
S143の後、S120〜S124に戻る。
【0102】
S120〜S124では、処理対象とする普通道路を新たなランドマーク間隔に基づいて決定し、前回以前に処理済みの普通道路を除いて残りの普通道路に対して交差箇所座標値を算出する。
例えば、2回目のランドマーク間隔が「100メートル」である場合、図3において150メートル間隔で配置された普通道路b〜fを処理対象の普通道路とし、1回目に処理済みの普通道路b、d、fを除いて普通道路c、eについて交差箇所座標値を算出する。
【0103】
実施の形態2において、距離以外の値をランドマーク間隔に用いても構わない。例えば、処理を省略する普通道路の本数をランドマーク間隔として使用しても構わない。ランドマーク間隔が「2」であれば2つおきに普通道路を処理する。そして、評価結果が「NG」であればランドマーク間隔を「1」に減らし1つおきに普通道路を処理する。
【0104】
実施の形態2において、処理対象とする普通道路を間引くことにより処理時間を短縮し、利用者の作業量を軽減することができる。
また、標定位置の精度が基準を満たしていない場合に位置を標定し直すことにより、特定の基準を満たす標定位置を得ることができる。
【0105】
実施の形態3.
高架下道路を複数回走行した場合に、いずれかの回の走行時に取得した点群データを参照データにして、他の走行回での走行位置を標定する形態について説明する。
【0106】
図14、図15は、実施の形態3における計測車両200の走行経路を示す平面図である。
計測車両200は図14および図15に示す5つのルート(1)〜(5)を走行したものとする。高架下道路aは片側三車線の道路である。
図14において、ルート(1)は高架下道路aの中央車線、ルート(2)は高架下道路aの右車線、ルート(3)は高架下道路aの左車線を走行経路としている。
図15において、ルート(4)は普通道路fから高架下道路aに侵入し、普通道路dに抜ける経路であり、ルート(5)は普通道路dから高架下道路aに侵入する経路である。
【0107】
実施の形態3では、一つの高架下道路の走行経路(ルート(1))を普通道路の走行経路(ルート(4)(5))の点群データに基づいて標定し、その高架下道路の走行経路の点群データに基づいて他の高架下道路の走行経路(ルート(2)(3))を標定する。
【0108】
図16は、実施の形態3における走行経路標定方法を示すフローチャートである。
実施の形態3における走行経路標定方法について、図16に基づいて説明する。
【0109】
図16に示す処理符号は、実施の形態1で説明した位置標定方法(図5参照)の処理符号と対応している。したがって、処理符号が同じ処理は処理内容が同じである。処理内容の詳細については実施の形態1に記載している。
【0110】
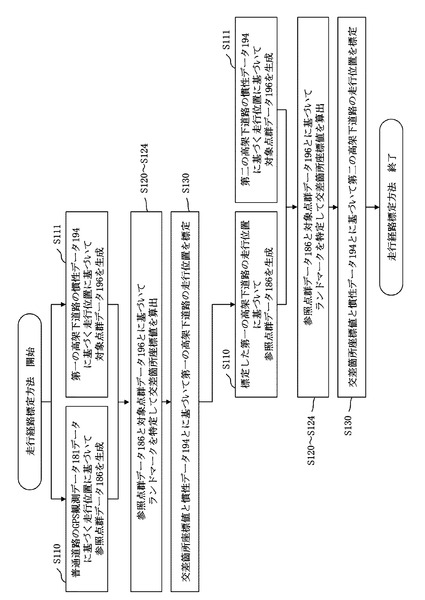
<第一の位置標定処理>
まず、普通道路(ルート(4)(5))のGPS観測データ181に基づく走行位置と普通道路の距離方位点群データ183とに基づいて、普通道路の参照点群データ186を生成する(S110)。
また、第一の高架下道路(ルート(1))の慣性データ194に基づく走行位置と第一の高架下道路の距離方位点群データ193とに基づいて、第一の高架下道路の対象点群データ196を生成する(S111)。
次に、普通道路の参照点群データ186と第一の高架下道路の対象点群データ196とに基づいて交差箇所のランドマークを特定し、ランドマークの参照点の三次元座標値とランドマークの対象点の距離方位とに基づいて交差箇所の座標値を算出する(S120〜S124)。
そして、交差箇所の座標値と第一の高架下道路の慣性データ194とに基づいて第一の高架下道路の走行位置を標定する(S130)。
【0111】
<第二の位置標定処理>
さらに、第一の高架下道路の走行位置と第一の高架下道路の距離方位点群データ183とに基づいて、第一の高架下道路の三次元点群データを参照点群データ186として生成する(S110)。
また、第二の高架下道路(ルート(2)(3))の慣性データ194に基づく走行位置と第二の高架下道路の距離方位点群データ193とに基づいて、第二の高架下道路の対象点群データ196を生成する(S111)。
次に、第一の高架下道路の参照点群データ186と第二の高架下道路の対象点群データ196とに基づいて交差箇所のランドマークを特定し、ランドマークの参照点の三次元座標値とランドマークの対象点の距離方位とに基づいて交差箇所の座標値を算出する(S120〜S124)。
そして、交差箇所の座標値と第二の高架下道路の慣性データ194とに基づいて第二の高架下道路の走行位置を標定する(S130)。
【0112】
上記のように、第二の位置標定処理では、第一の高架下道路の三次元点群データを参照点群データ186にして第二の高架下道路の走行位置を標定している。
【0113】
上記の第一、第二の位置標定処理において、実施の形態2と同じく標定位置を評価し、評価結果が悪い場合にランドマーク間隔を狭めて交差箇所座標値の算出(S120〜S124)および走行位置の標定(S130)を繰り返しても構わない。
【0114】
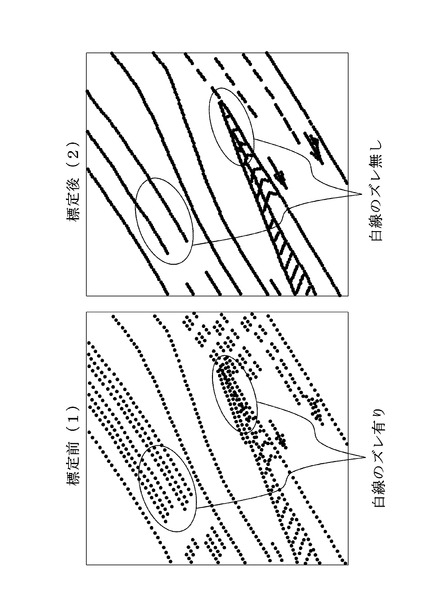
図17は、実施の形態3における走行経路標定方法の効果を示す図である。
図17(1)は、標定前の走行位置に基づく高架下道路(図14のルート(1)〜(3))の白線の三次元点群をプロットした画像であり、図17(2)は、標定後の走行位置に基づく高架下道路の白線の三次元点群をプロットした画像である。
図17(1)に示すように標定前にはルート(1)〜ルート(3)それぞれで取得した白線の三次元点群がずれてしまうが、図17(2)に示すように標定後にはルート(1)〜ルート(3)それぞれで取得した白線の三次元点群がずれずに重なる。
したがって、実施の形態1または実施の形態2の位置標定方法は、衛星不可視時の走行経路を正しく標定することができる。
【符号の説明】
【0115】
100 位置標定装置、110 三次元点群復元部、120 交差箇所特定部、121 ランドマーク間隔決定部、130 交差箇所点群表示部、140 ランドマーク点特定部、150 交差箇所座標値算出部、160 高架下位置標定部、161 カルマンフィルタ部、162 標定位置評価部、180 参照データ記憶部、181 GPS観測データ、182 画像データ、183 距離方位点群データ、184 慣性データ、185 オドメトリデータ、186 参照点群データ、190 対象データ記憶部、191 GPS観測データ、192 画像データ、193 距離方位点群データ、194 慣性データ、195 オドメトリデータ、196 対象点群データ、200 計測車両、201 天板、210 GPS受信機、220 カメラ、230 レーザレーダ、240 慣性計測装置、250 オドメトリ、300 交差箇所指定画面、310 ランドマーク点指定画面、901 表示装置、902 キーボード、903 マウス、904 ドライブ装置、911 CPU、912 バス、913 ROM、914 RAM、915 通信ボード、920 磁気ディスク装置、921 OS、922 ウィンドウシステム、923 プログラム群、924 ファイル群、930 マウスカーソル。
【技術分野】
【0001】
本発明は、例えば、高架下の道路を走行する車両の位置を標定する位置標定装置、位置標定方法および位置標定プログラムに関するものである。
【背景技術】
【0002】
GPS(Global Positioning System)を利用する地上航法装置は、その特性上、慣性航法装置と組み合わせて利用される。例えば、車両を測位する地上航法装置では慣性航法装置とオドメトリとが組み合わせて利用される。
しかし、慣性航法装置にはバイアスとスケールファクタ誤差が、オドメトリにはスケールファクタ誤差とオフセット誤差とが存在する。また、これらの誤差はGPSが使用できる時間が十分にあれば複合フィルタによって推定・補正することができるが、長時間のGPS衛星不可視状態では時間と走行距離に比例して大きくなってしまう。
【0003】
そこで、近年、座標値が予め分かっている地物をランドマークとして使用し、ランドマークの座標値を用いて測位対象(例えば、車両)の位置を補正する技術が知られている。
しかし、ランドマークの座標値を得るためにトータルステーションなどを用いて測量を行うとコストや手間がかかる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−264983号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、例えば、GPS衛星が不可視である場所についても測量を行わずに高い精度で測位結果を得られるようにすることを目的とする。
【課題を解決するための手段】
【0006】
本発明の位置標定装置は、
測位衛星から測位信号を受信して受信結果を衛星観測データとして取得する受信機と、画像を撮像して撮像した画像を表す画像データを取得するカメラと、複数の計測点それぞれに対して距離と方位とを示す距離方位を計測して計測した複数の距離方位を示すデータを距離方位点群データとして取得するレーザレーダと、慣性測位に用いる慣性データを取得する慣性センサとを備える計測車両が走行した位置を標定する。
前記位置標定装置は、
前記計測車両により第一の道路で取得された画像データを記憶し、前記計測車両により前記第一の道路で取得された距離方位点群データに基づく参照点群データであって距離方位点群データに示される複数の距離方位に対応する複数の三次元座標値を示す参照点群データを記憶する参照データ記憶部と、
前記計測車両により第二の道路で取得された画像データと慣性データとを記憶し、前記計測車両により前記第二の道路で取得された距離方位点群データに基づく対象点群データであって距離方位点群データに示される複数の距離方位に対応する複数の三次元座標値を示す対象点群データを記憶する対象データ記憶部と、
前記参照データ記憶部に記憶される画像データに基づいて前記第一の道路と前記第二の道路とが交わる交差箇所で撮像された画像を参照画像として表示し、前記参照データ記憶部に記憶される参照点群データに基づいて複数の三次元座標値に対応する複数の計測点を複数の参照点として前記参照画像に重ねて表示し、前記対象データ記憶部に記憶される画像データに基づいて前記交差箇所で撮像された画像を対象画像として表示し、前記対象データ記憶部に記憶される対象点群データに基づいて複数の三次元座標値に対応する複数の計測点を複数の対象点として前記対象画像に重ねて表示する交差箇所点群表示部と、
前記交差箇所点群表示部により表示された複数の参照点のうち前記参照画像に特定の地物として映るランドマークに重ねて表示された参照点をランドマーク参照点として特定し、前記交差箇所点群表示部により表示された複数の対象点のうち前記対象画像内の前記ランドマークに重ねて表示された対象点をランドマーク対象点として特定するランドマーク点特定部と、
前記ランドマーク参照点に対応する三次元座標値と前記ランドマーク対象点に対応する距離方位とに基づいて、前記ランドマーク対象点に対応する距離方位を計測したときの前記計測車両の三次元座標値を交差箇所座標値として算出する交差箇所座標値算出部と、
前記交差箇所座標値算出部により算出された交差箇所座標値と前記対象データ記憶部に記憶される慣性データとを用いて慣性測位を行って前記計測車両が走行した前記第二の道路内の位置を前記第二の道路の走行位置として標定する位置標定部とを備える。
【発明の効果】
【0007】
本発明によれば、例えば、GPS衛星が不可視である場所(衛星不可視道路)についても測量を行わずに高い精度で測位結果を得ることができる。
【図面の簡単な説明】
【0008】
【図1】実施の形態1における位置標定装置100の機能構成図。
【図2】実施の形態1における計測車両200の外観図。
【図3】実施の形態1における計測車両200の走行経路を示す平面図。
【図4】実施の形態1における計測車両200の走行経路を示す側面図。
【図5】実施の形態1における位置標定装置100の位置標定方法を示すフローチャート。
【図6】実施の形態1における計測車両200の走行位置と計測点と距離方位との関係図。
【図7】実施の形態1における三次元点群の表示方法を示す図。
【図8】実施の形態1における交差箇所指定画面300を示す図。
【図9】実施の形態1におけるランドマーク点指定画面310を示す図。
【図10】実施の形態1におけるランドマーク参照点とランドマーク対象点と計測車両200の走行位置との関係図。
【図11】実施の形態1における位置標定装置100のハードウェア資源の一例を示す図。
【図12】実施の形態2における位置標定装置100の機能構成図。
【図13】実施の形態2における位置標定装置100の位置標定方法を示すフローチャート。
【図14】実施の形態3における計測車両200の走行経路を示す平面図。
【図15】実施の形態3における計測車両200の走行経路を示す平面図。
【図16】実施の形態3における走行経路標定方法を示すフローチャート。
【図17】実施の形態3における走行経路標定方法の効果を示す図。
【発明を実施するための形態】
【0009】
実施の形態1.
図1は、実施の形態1における位置標定装置100の機能構成図である。
実施の形態1における位置標定装置100の機能構成について、図1に基づいて以下に説明する。
【0010】
位置標定装置100は、後述する計測車両200が走行した位置を標定する。
後述するように、計測車両200は、GPS受信機、カメラ、レーザレーダ、慣性計測装置およびオドメトリを備える。
GPS受信機(受信機の一例)は、GPS衛星(測位衛星の一例)から測位信号を受信して受信結果をGPS観測データ181(衛星観測データの一例)として取得する。
カメラは、画像を撮像して撮像した画像を表す画像データ182を取得する。
レーザレーダは、複数の計測点それぞれに対して距離と方位とを示す距離方位を計測して計測した複数の距離方位を示すデータを距離方位点群データ183として取得する。
慣性計測装置(慣性センサの一例)は、慣性測位に用いる慣性データ184を取得する。
【0011】
位置標定装置100は、三次元点群復元部110、交差箇所特定部120、交差箇所点群表示部130、ランドマーク点特定部140、交差箇所座標値算出部150、高架下位置標定部160およびカルマンフィルタ部161を備える。
さらに、位置標定装置100は、参照データ記憶部180と対象データ記憶部190とを備える。
【0012】
参照データ記憶部180(衛星可視データ記憶部の一例)は、高架下の道路と、高架下の道路と交わる非高架下の道路とのうち、非高架下の道路を走行した計測車両200により取得されるGPS観測データ181、画像データ182、距離方位点群データ183、慣性データ184およびオドメトリデータ185を記憶する。
また、衛星可視データ記憶部180は、三次元点群復元部110により生成される参照点群データ186を記憶する。
参照データ記憶部180は、複数の非高架下の道路それぞれについて上記の各種データを記憶する。
高架下の道路はGPS衛星を遮蔽する遮蔽物が存在する衛星不可視道路の一例であり、非高架下の道路はGPS衛星を遮蔽する遮蔽物が存在しない衛星可視道路の一例である。
【0013】
以下、非高架下の道路を「普通道路」という。
【0014】
対象データ記憶部190(衛星不可視データ記憶部の一例)は、高架下の道路を走行した計測車両200により取得されるGPS観測データ191、画像データ192、距離方位点群データ193、慣性データ194およびオドメトリデータ195を記憶する。
また、対象データ記憶部190は、三次元点群復元部110により生成される対象点群データ196を記憶する。
【0015】
三次元点群復元部110(参照点群データ生成部、対象点群データ生成部の一例)は、普通道路(非高架下の道路)のGPS観測データ181に基づいて計測車両200が走行した普通道路内の位置を普通道路の走行位置として測位する。
三次元点群復元部110は、測位した普通道路の走行位置に基づいて普通道路の距離方位点群データ183に示される複数の距離方位に対応する複数の計測点それぞれの三次元座標値を算出する。
三次元点群復元部110は、算出した複数の三次元座標値を示すデータを参照点群データ186として生成する。
【0016】
三次元点群復元部110は、高架下道路の慣性データ194に基づいて計測車両200が走行した高架下道路内の位置を高架下道路の走行位置として測位する。
三次元点群復元部110は、測位した高架下道路の走行位置に基づいて高架下道路の距離方位点群データ193に示される複数の距離方位に対応する複数の計測点それぞれの三次元座標値を算出する。
三次元点群復元部110は、算出した複数の三次元座標値を示すデータを対象点群データ196として生成する。
【0017】
交差箇所特定部120は、高架下道路と普通道路との交差箇所を特定し、交差箇所で撮像された画像を表す画像データ182、192を特定する。
【0018】
交差箇所点群表示部130は、高架下道路と普通道路との交差箇所で撮像された画像を表す普通道路の画像データ182を参照データ記憶部180から取得し、取得した普通道路の画像データ182に基づいて交差箇所の画像を参照画像として表示する。
交差箇所点群表示部130は、参照点群データ186に示される複数の三次元座標値に対応する複数の計測点を複数の参照点として参照画像に重ねて表示する。
【0019】
交差箇所点群表示部130は、交差箇所で撮像された画像を表す高架下道路の画像データ192を対象データ記憶部190から取得し、取得した高架下道路の画像データ192に基づいて交差箇所の画像を対象画像として表示する。
交差箇所点群表示部130は、対象点群データ196に示される複数の三次元座標値に対応する複数の計測点を複数の対象点として対象画像に重ねて表示する。
【0020】
ランドマーク点特定部140は、交差箇所点群表示部130により表示された複数の参照点のうち参照画像に特定の地物として映るランドマークに重ねて表示された参照点をランドマーク参照点として特定する。
ランドマーク点特定部140は、交差箇所点群表示部130により表示された複数の対象点のうち対象画像内のランドマークに重ねて表示された対象点をランドマーク対象点として特定する。
【0021】
例えば、ランドマーク点特定部140は、複数の普通道路と高架下道路との交差箇所毎に交差箇所にあるランドマークのランドマーク参照点とランドマーク対象点とを特定する。
【0022】
交差箇所座標値算出部150は、ランドマーク参照点に対応する三次元座標値とランドマーク対象点に対応する距離方位とに基づいて、ランドマーク対象点に対応する距離方位が計測されたときに計測車両200が位置していた地点の三次元座標値を交差箇所座標値として算出する。
【0023】
例えば、交差箇所座標値算出部150は、交差箇所毎に特定されたランドマーク参照点とランドマーク対象点とに基づいて交差箇所毎に交差箇所座標値を算出する。
【0024】
高架下位置標定部160(位置標定部の一例)は、交差箇所座標値算出部150により算出された交差箇所座標値と高架下道路の慣性データ194とに基づいて、計測車両200が走行した高架下道路内の位置を高架下道路の走行位置として標定する。
【0025】
例えば、高架下位置標定部160は、高架下道路を交差箇所毎に区分けした高架下道路の区間毎に、交差箇所に対応する交差箇所座標値と高架下道路の当該区間で取得された慣性データ194とに基づいて高架下道路の走行位置を標定する。
【0026】
カルマンフィルタ部161は慣性測位の誤差を推定する。カルマンフィルタ部161により推定された慣性測位の誤差は、慣性測位において誤差補正量とし用いられる。
【0027】
図2は、実施の形態1における計測車両200の外観図である。
実施の形態1における計測車両200について、図2に基づいて以下に説明する。
【0028】
計測車両200は天板201を備え、天板201にはGPS受信機210、カメラ220、レーザレーダ230および慣性計測装置240が設置されている。
また、計測車両200はオドメトリ250を備える。
【0029】
GPS受信機210は、天板201に1台または複数台が設置される。
GPS受信機210は、各時刻に複数のGPS衛星それぞれから測位信号(搬送波)を受信し、測位信号の受信結果を示すデータをGPS観測データとして生成する。
GPS観測データには、測位信号を受信した受信時刻(取得時刻)毎に搬送波位相や航法メッセージなどが設定されている。
【0030】
カメラ220は、各時刻に計測車両200の前後方向(または計測車両200の左右方向)を撮像し、撮像して得られた画像を表すデータを画像データとして生成する。
画像データは撮像時刻(取得時刻)に対応付けられている。
【0031】
レーザレーダ230(LRF:Laser Range Finder)は、斜め上向き(または斜め下向き)に設置され、計測車両200の左右方向に首振りしながらレーザ光を発射し、発射方向に位置する地物に反射したレーザ光を受光する。
レーザレーダ230は、レーザ光の発射方向(方位)とレーザ光を発射してから受光するまでの時間から求まる地物までの距離とを距離方位として算出し、算出した距離方位を示すデータを距離方位点群データとして生成する。
距離方位点群データには、レーザ光の発射時刻または受信時刻(取得時刻)毎に距離方位が設定されている。
以下、距離方位点群データに示される距離方位を「距離方位点」として説明する。
【0032】
慣性計測装置240(IMU:Inertial Measurement Unit)は、ジャイロセンサと加速度センサとで構成される。ジャイロセンサは計測車両200の3軸方向xyzそれぞれの角速度を検出し、加速度センサは計測車両200の3軸方向xyzそれぞれの加速度を検出する。
慣性計測装置240は、計測車両200の3軸方向xyzそれぞれの角速度と加速度とを示すデータを慣性データとして生成する。
慣性データには、検出時刻(取得時刻)毎に角速度と加速度とが設定されている。
【0033】
オドメトリ250は、計測車両200の速度を表す車速パルスを検出し、車速パルスの検出結果(例えば、単位時間当たりのタイヤの回転数)を示すデータをオドメトリデータとして生成する。
オドメトリデータには、検出時刻(取得時刻)毎に車速パルスの検出結果が設定されている。
【0034】
図3は、実施の形態1における計測車両200の走行経路を示す平面図である。
図4は、実施の形態1における計測車両200の走行経路を示す側面図である。
【0035】
計測車両200は、図3、図4に示すように高速道路の下を通る一般道aを走行する(図4の点線矢印)。
高速道路の下を通る一般道ではGPS衛星からの測位信号が高速道路により遮られるため、計測車両200は測位信号を正しく受信できず、不十分なGPS観測データ191しか得られない。
【0036】
計測車両200は、さらに高速道路下の一般道と交わる道路b〜fを走行する(図3の矢印)。
高速道路下の一般道と交わる道路ではGPS衛星からの測位信号が高速道路下を除いて高速道路により遮られないため、計測車両200は測位信号を正しく受信でき、十分なGPS観測データ181を得られる。
【0037】
以下、高速道路の下を通る一般道aを「高架下道路」といい、高速道路下の一般道と交わる道路b〜fを「普通道路」という。
【0038】
計測車両200が高架下道路aを走行したときに取得された各種データを位置標定装置100の参照データ記憶部180に記憶する。
また、計測車両200が普通道路b〜fを走行したときに取得された各種データを位置標定装置100の対象データ記憶部190に記憶する。各種データは道路毎(または経路毎)に記憶しておくものとする。
【0039】
図5は、実施の形態1における位置標定装置100の位置標定方法を示すフローチャートである。
実施の形態1における位置標定装置100の位置標定方法について、図5に基づいて以下に説明する。
【0040】
まず、位置標定方法の概要について説明する。
【0041】
三次元点群復元部110は、GPS観測データ181に基づいて普通道路の走行位置を測位し、普通道路の走行位置と距離方位点群データ183とに基づいて各距離方位点の三次元座標値を示す参照点群データ186を生成する(S110)。
三次元点群復元部110は、慣性データ194に基づいて高架下道路の走行位置を測位し、高架下道路の走行位置と距離方位点群データ193とに基づいて各距離方位点の三次元座標値を示す対象点群データ196を生成する(S111)。
【0042】
交差箇所特定部120は普通道路を一つ選択し、普通道路の交差箇所の画像(参照画像)と高架下道路の交差箇所の画像(対象画像)とを特定する(S120)。
交差箇所点群表示部130は、参照画像に参照点群を重畳して表示し、対象画像に対象点群を重畳して表示する(S121)。
ランドマーク点特定部140は、参照画像と対象画像とに共通して映っているランドマークに重畳するランドマーク参照点とランドマーク対象点とを特定する(S122)。
交差箇所座標値算出部150は、ランドマーク参照点の三次元座標値とランドマーク対象点の距離方位とに基づいて交差箇所座標値を算出する(S123)。
S120〜S123は全ての普通道路に対して実行される(S124)。
【0043】
高架下位置標定部160は、各交差箇所座標値と慣性データ194とに基づいて高架下道路の走行位置を標定する(S130)。
【0044】
次に、位置標定方法の詳細について説明する。
【0045】
S110において、三次元点群復元部110は、普通道路で取得されたGPS観測データ181を用いてGPS測位を行い、普通道路での計測車両200の走行位置を算出する。例えば、三次元点群復元部110はGPS観測データ181と慣性データ184とを用いてGPS/INS(Inertial Navigation System)複合航法(GPS測位の一例)を行う。例えば、GPS/INS複合航法において、三次元点群復元部110はGPS観測データ181に含まれる搬送波位相を用いて搬送波位相の二重位相差残差を算出する。カルマンフィルタ部161は搬送波位相の二重位相差残差を用いて慣性データ194の誤差を補正量として推定する。三次元点群復元部110は慣性データ194を補正量で補正し、補正した慣性データ194を用いてストラップダウン演算を行う。
三次元点群復元部110は、普通道路での計測車両200の走行位置と普通道路で取得された距離方位点群データ193とに基づいて、距離方位点群データ193に含まれる複数の距離方位点に対応する複数の計測点それぞれの三次元座標値を算出する。
三次元点群復元部110は、算出した複数の三次元座標値を示すデータを参照点群データ186として生成する。
【0046】
図6は、実施の形態1における計測車両200の走行位置と計測点と距離方位との関係図である。
図6において、三次元点群復元部110は、計測車両200の走行位置から方位θに距離lだけ離れた地点の三次元座標値を計測点の三次元座標値として算出する。方位θおよび距離lはレーザレーダ230により計測された値を示している。
【0047】
図5に戻り、位置標定方法の説明を続ける。
【0048】
S110において、GPS測位により計測車両200の走行位置を高い精度で求めることができるため、参照点群データ186に示される各計測点の三次元座標値の精度は高い。また、高架下道路と交わる交差箇所で一時的に測位衛星を受信できなくなっても、交差箇所の前後では測位精度(または慣性データ194の補正精度)が高いため、測位結果を補正することができる。
三次元点群復元部110は、普通道路毎に参照点群データ186を生成し、各参照点群データ186を参照データ記憶部180に記憶する。
また、三次元点群復元部110は、普通道路での計測車両200の走行位置を時刻と対応付けて参照データ記憶部180に記憶する。
以下、参照点群データ186に示される三次元座標値を「参照点(三次元点)」として説明する。
S110の後、S111に進む。
【0049】
S111において、三次元点群復元部110は、高架下道路で取得された慣性データ194を用いて慣性測位を行い、高架下道路での計測車両200の走行位置を算出する。例えば、三次元点群復元部110はオドメトリデータ195と慣性データ194とを用いてODO(ODOmetry)/INS複合航法(慣性測位の一例)を行う。例えば、ODO/INS複合航法において、三次元点群復元部110はオドメトリデータ195に基づいて速度や加速度の残差を算出する。カルマンフィルタ部161は速度や加速度の残差を用いて慣性データ194の誤差を補正量として推定する。三次元点群復元部110は慣性データ194を補正量で補正し、補正した慣性データ194を用いてストラップダウン演算を行う。
三次元点群復元部110は、S110と同様に高架下道路での計測車両200の走行位置と高架下道路で取得された距離方位点群データ183とに基づいて各計測点の三次元座標値を算出し、各計測点の三次元座標値を示す対象点群データ196を生成する。
三次元点群復元部110は、生成した対象点群データ196とを対象データ記憶部190に記憶する。
また、三次元点群復元部110は、高架下道路での計測車両200の走行位置を時刻と対応付けて対象データ記憶部190に記憶する。
以下、対象点群データ196に示される三次元座標値を「対象点(三次元点)」として説明する。
【0050】
慣性データ194が示す角速度や加速度にはジャイロセンサおよび加速度センサのバイアス誤差やスケールファクタ誤差などが含まれる。また、オドメトリデータ195が示す計測結果にはオドメトリ250のスケールファクタ誤差やオフセット誤差(タイヤの向きと進行方向との差)が含まれる。
これらの誤差が補正されなければ、慣性測位によって求まる計測車両200の走行位置は時間の経過と共にその精度が悪化する。そのため、対象点群データ196に示される各計測点の三次元座標値の精度は高くない。
【0051】
S111の後、S120に進む。
【0052】
S120において、交差箇所特定部120は複数の普通道路から普通道路を一つ選択する。以下、選択した普通道路を「選択普通道路」という。
交差箇所特定部120は、選択普通道路と高架下道路とが交差する交差箇所を特定し、交差箇所で撮像した画像を表す画像データを特定する。交差箇所の特定方法については後述する。
以下、特定した選択普通道路の画像データ182を「参照画像」として説明し、特定した高架下道路の画像データ192を「対象画像」として説明する。
S120の後、S121に進む。
【0053】
S121において、交差箇所点群表示部130は、交差箇所から所定の範囲内で取得された参照点群を参照点群データ186から抽出する。また、交差箇所点群表示部130は、交差箇所から所定の範囲内で取得された対象点群を対象点群データ196から抽出する。以下、抽出した参照点群を「抽出参照点群」といい、抽出した対象点群を「抽出対象点群」という。
交差箇所点群表示部130は、抽出参照点群を参照画像に重ねて表示し、抽出対象点群を対象画像に重ねて表示する。
S121の後、S122に進む。
【0054】
図7は、実施の形態1における三次元点群の表示方法を示す図である。
三次元点群(抽出参照点群、抽出対象点群)を画像に重ねて表示する方法について、図7に基づいて説明する。
【0055】
交差箇所点群表示部130は画像に対応する撮像面を算出する。撮像面はカメラ220から焦点距離fだけ離れた点Pにおいてカメラ220の視線方向と直交する平面である。カメラ220の座標値は計測車両200の走行位置を用いて算出する。
交差箇所点群表示部130はカメラ220と計測点(三次元点)とを結んだ直線Lを算出し、直線Lと撮像面との交点(計測点を画像に投影する点)を示すuv座標値を算出する。
交差箇所点群表示部130は、画像内のuv座標値で示される画素に計測点(三次元点)を表示する。
【0056】
図5に戻り、位置標定方法の説明を続ける。
【0057】
S122において、ランドマーク点特定部140は、参照画像に表示された抽出参照点群からランドマークに重ねて表示された抽出参照点を特定し、対象画像に表示された対象画像点群からランドマークに重ねて表示された抽出対象点を特定する。
ランドマークとは、参照画像と対象画像との両方に映っている地物(またはその一部)である。例えば、道路標識や道路標示をランドマークとして利用することができる。
以下、特定した抽出参照点を「ランドマーク参照点」といい、特定した抽出対象点を「ランドマーク対象点」という。
ランドマーク、ランドマーク参照点およびランドマーク対象点の特定方法については後述する。
S122の後、S123に進む。
【0058】
図8は、実施の形態1における交差箇所指定画面300を示す図である。
図9は、実施の形態1におけるランドマーク点指定画面310を示す図である。
S120〜S122(図5参照)の具体例について、図8および図9に基づいて説明する。
【0059】
交差箇所特定部120は、図8に示すような交差箇所指定画面300を表示装置に表示する。
交差箇所指定画面300は、選択普通道路bでの計測車両200の走行位置(S110の測位結果)と高架下道路aでの計測車両200の走行位置(S111の測位結果)とを道路地図に表示した画像を示している。
【0060】
利用者は、交差箇所指定画面300においてマウスカーソル930などを用いて交差箇所を指定する。
交差箇所特定部120は、利用者に指定された交差箇所から所定の範囲内で取得された複数の画像データ182を参照画像候補として特定する。同様に、交差箇所特定部120は対象画像候補を特定する。
【0061】
但し、交差箇所特定部120は、選択普通道路での計測車両200の走行位置と高架下道路での計測車両200の走行位置とに基づいて交差箇所の三次元座標値を算出し、算出した交差箇所の三次元座標値に基づいて参照画像候補と対象画像候補とを自動で特定しても構わない。
【0062】
交差箇所点群表示部130は、図9に示すようなランドマーク点指定画面310を表示装置に表示する。
ランドマーク点指定画面310の右側は、複数の参照画像候補または複数の対象画像候補に対応させた複数の画像点を画像を撮像した時刻の計測車両200の走行位置に基づいてプロットした画像を示している。
ランドマーク点指定画面310の左側は、画面右側で指定された参照画像候補または対象画像候補を表示している。また、画像候補に重ねて表示した点群を示している(道路標識部分以外の点群は図示省略)。
【0063】
利用者はランドマーク点指定画面310の右側で参照画像候補をマウスカーソル930を用いて選択し、交差箇所点群表示部130は選択された参照画像候補を画面の左側に表示する。
利用者は選択した参照画像候補を画面の左側で確認し、ランドマーク(図9では道路標識の矢印の先端)が最も大きく映っている参照画像候補を参照画像として指定する。同様に、利用者は参照画像と同じランドマークが映っている対象画像を指定する。
【0064】
但し、交差箇所点群表示部130は、パターンマッチングや文字認識などにより道路標識や道路標示を識別し、ランドマークが大きく映っている参照画像と対象画像とを自動で特定しても構わない。
【0065】
交差箇所点群表示部130は、参照画像の撮像位置から所定の範囲内で取得された参照点群を参照点群データ186から抽出し、抽出した参照点群(抽出参照点群)を参照画像に重ねて表示する。
【0066】
利用者は、参照画像に表示された抽出参照点群からランドマークに表示されている抽出参照点をランドマーク参照点として指定する。ランドマーク点特定部140は利用者に指定されたランドマーク参照点を特定する。
同様に、交差箇所点群表示部130は抽出対象点群を対象画像に重ねて表示し、利用者はランドマーク対象点を指定し、ランドマーク点特定部140はランドマーク対象点を特定する。
【0067】
または、利用者はランドマークが映っている画素を指定し、ランドマーク点特定部140は利用者に指定された画素の近くに表示されている抽出参照点(または抽出対象点)をランドマーク参照点(またはランドマーク対象点)として特定する。
【0068】
但し、ランドマーク点特定部140は、パターンマッチングや文字認識などによりランドマークの画素を算出し、算出したランドマークの画素の近くに表示されている抽出参照点(または抽出対象点)をランドマーク参照点(またはランドマーク対象点)として自動で特定しても構わない。
【0069】
ランドマーク点指定画面310において、抽出参照点群を重ねた参照画像と抽出対象点群を重ねた対象画像とを並べて表示しても構わない。
【0070】
図5に戻り、位置標定方法の説明を続ける。
【0071】
S123において、交差箇所座標値算出部150は、ランドマーク参照点が示す三次元座標値とランドマーク対象点に対応する距離方位点が示す距離方位とを用いて計測車両200の走行位置を算出する。算出した計測車両200の走行位置は、ランドマーク対象点に対応する距離方位点を取得したときに計測車両200が位置していた地点の三次元座標値を示す。
以下、算出した計測車両200の走行位置を「交差箇所座標値」という。
S123の後、S124に進む。
【0072】
図10は、実施の形態1におけるランドマーク参照点とランドマーク対象点と計測車両200の走行位置との関係図である。
図10において、交差箇所座標値算出部150は、ランドマーク参照点から方位θに距離lだけ離れた地点の三次元座標値を交差箇所座標値として算出する。方位θおよび距離lはランドマーク対象点に対応する距離方位点の値を示している。
【0073】
図5に戻り、位置標定方法の説明を続ける。
【0074】
S124において、交差箇所特定部120は全ての普通道路(または普通道路の走行経路)を選択済みか否かを判定する。
全ての普通道路を選択済みの場合(YES)、S130に進む。
未選択の普通道路が残っている場合(NO)、S120に戻る。S120において交差箇所特定部120は未選択の普通道路を一つ選択する。そして、選択された普通道路に対してS121〜S123が実行される。
【0075】
例えば、S124までの処理により図3に示す交差箇所B〜Fにおける交差箇所座標値(B)〜(F)が算出される。
【0076】
S125において、高架下位置標定部160は、高架下道路を交差箇所毎に区分けする。
高架下位置標定部160は、高架下道路の区間毎に当該区間の交差箇所座標値と当該区間で取得された慣性データ194とを用いて慣性測位を行い、当該区間における計測車両200の走行位置を標定する。
例えば、高架下位置標定部160は図3において交差箇所座標値(B)と交差箇所Bから交差箇所Cまでの第1区間で取得された慣性データ194とを用いてODO/INS複合航法を行い、第1区間での計測車両200の走行位置を標定する。同様に、高架下位置標定部160は各交差箇所座標値と各区間の慣性データ194とを用いて区間毎に計測車両200の走行位置を標定する。
S125により、位置標定方法は終了する。
【0077】
図11は、実施の形態1における位置標定装置100のハードウェア資源の一例を示す図である。
図11において、位置標定装置100は、CPU911(Central・Processing・Unit)(マイクロプロセッサ、マイクロコンピュータともいう)を備えている。CPU911は、バス912を介してROM913、RAM914、通信ボード915、表示装置901、キーボード902、マウス903、ドライブ装置904、磁気ディスク装置920と接続され、これらのハードウェアデバイスを制御する。ドライブ装置904は、FD(Flexible・Disk・Drive)、CD(Compact Disc)、DVD(Digital・Versatile・Disc)などの記憶媒体を読み書きする装置である。
【0078】
通信ボード915は、有線または無線で、LAN(Local Area Network)、インターネット、電話回線などの通信網に接続している。
【0079】
磁気ディスク装置920には、OS921(オペレーティングシステム)、ウィンドウシステム922、プログラム群923、ファイル群924が記憶されている。
【0080】
プログラム群923には、実施の形態において「〜部」として説明する機能を実行するプログラムが含まれる。プログラムは、CPU911により読み出され実行される。すなわち、プログラムは、「〜部」としてコンピュータを機能させるものであり、また「〜部」の手順や方法をコンピュータに実行させるものである。
【0081】
ファイル群924には、実施の形態において説明する「〜部」で使用される各種データ(入力、出力、判定結果、計算結果、処理結果など)が含まれる。
【0082】
実施の形態において構成図およびフローチャートに含まれている矢印は主としてデータや信号の入出力を示す。
【0083】
実施の形態において「〜部」として説明するものは「〜回路」、「〜装置」、「〜機器」であってもよく、また「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ファームウェア、ソフトウェア、ハードウェアまたはこれらの組み合わせのいずれで実装されても構わない。
【0084】
実施の形態1において、例えば、以下のような位置標定装置100について説明した。
【0085】
位置標定装置100は、マッピングカー(計測車両200)と計測データのデータベース(参照点群データ186)とランドマーク選定部(ランドマーク点特定部140)とにより構成される。
マッピングカーは、GPS/IMU、オドメトリ、カメラ、Lidar(Light Detection and Ranging)(レーザレーダ)等を搭載する。
計測データのデータベースは、計測すべき目標走行経路(高架下道路)と交差または重複するシーン(交差箇所)毎に分離された計測データを記憶する。
ランドマーク選定部は、シーン毎に計測データ中で同じランドマークを選定する。
位置標定装置100は、シーン毎に計測データ中に共通して映っている地物位置であり且つその位置誤差予測値が小さい地物をランドマークとして使用し、誤差が大きい走行経路のデータ(高架下道路での走行位置)を修正する。
本手法によれば、従来のように測量等の手法でランドマークをわざわざ計測しなくても、GPS可視性の良い走行データ(普通道路の参照点群データ186)中の地物位置をランドマークとして使用できる。つまり、既知の測量点が不要である。
また、本手法によれば、カーナビゲーションシステム(カーナビ)のデータ更新のように数年に1回は発生する業務において初回の計測データ(参照点群データ186)さえ好条件に計測できればよい。以後は、初回のデータ中の地物をランドマークとして用いることで、再現性の高い計測が可能になるからである。
【0086】
実施の形態2.
ランドマーク間隔(交差箇所の間隔)を決定し、決定したランドマーク間隔に基づいて普通道路を選択する形態について説明する。
また、計測車両200の標定位置の精度を評価し、標定位置の精度が基準を満たさない場合にランドマーク間隔を狭めて計測車両200の走行位置を新たに標定する形態について説明する。
【0087】
図12は、実施の形態2における位置標定装置100の機能構成図である。
実施の形態2における位置標定装置100の機能構成について、図12に基づいて以下に説明する。
【0088】
位置標定装置100は、実施の形態1で説明した構成(図1参照)に加えて、ランドマーク間隔決定部121と標定位置評価部162とを備える。
【0089】
ランドマーク間隔決定部121は、普通道路(衛星可視道路の一例)と高架下道路(衛星不可視道路の一例)との交差箇所の間隔をランドマーク間隔として決定する。
例えば、ランドマーク間隔決定部121は所定の初期値を1回目のランドマーク間隔とし、1回目のランドマーク間隔より小さい値を2回目のランドマーク間隔とする。
【0090】
高架下位置標定部160(位置標定部の一例)は、複数の普通道路のうち高架下道路と所定のランドマーク間隔で交わる複数の普通道路それぞれの交差箇所で高架下道路を区分けする。高架下位置標定部160は、高架下道路の区間毎に高架下道路の走行位置を標定する。
【0091】
標定位置評価部162(精度判定部の一例)は、高架下位置標定部160により標定された高架下道路の走行位置が所定の精度を有しているか否かを判定する。
【0092】
高架下位置標定部160は、標定位置評価部162により高架下道路の走行位置が所定の精度を有さないと判定された場合、複数の普通道路のうち前回のランドマーク間隔より狭い間隔で高架下道路と交わる複数の普通道路それぞれの交差箇所で高架下道路を区分けする。高架下位置標定部160は、高架下道路の区間毎に高架下道路の走行位置を標定する。
【0093】
図13は、実施の形態2における位置標定装置100の位置標定方法を示すフローチャートである。
実施の形態2における位置標定装置100の位置標定方法について、図13に基づいて以下に説明する。
【0094】
位置標定方法では、実施の形態1で説明した処理(図5参照)に加えて、S140〜S143を実行する。
以下、S140〜S143について主に説明する。
【0095】
S110〜S111において、三次元点群復元部110は、参照点群データ186と対象点群データ196とを生成する(図5参照)。
S110〜S111の後、S140に進む。
【0096】
S140において、ランドマーク間隔決定部121は、ランドマーク間隔を決定する。ランドマーク間隔は、普通道路と高架下道路との交差箇所の間隔であり、普通道路の選択に用いられる。
例えば、ランドマーク間隔決定部121は、所定の初期値(例えば、300メートル)を1回目のランドマーク間隔として設定する。
S140の後、S120〜S124に進む。
【0097】
S120〜S124において、交差箇所特定部120〜交差箇所座標値算出部150は、普通道路毎に交差箇所座標値を算出する(図5参照)。
但し、処理対象とする普通道路をランドマーク間隔に基づいて決定する。例えば、図3において普通道路b〜fそれぞれと高架下道路との交差箇所B〜Fが100メートル程度の間隔で位置し、ランドマーク間隔が「200メートル」である場合、図3において200メートル間隔で配置された普通道路b、d、fを処理対象の普通道路とする。つまり、普通道路bに対応する交差箇所座標値と普通道路dに対応する交差箇所座標値と普通道路fに対応する交差箇所座標値とを算出する。普通道路の交差箇所の間隔は予め設定されているものとする。または、S110で測位した普通道路の走行位置とS120で測位した高架下道路の走行位置とに基づいて普通道路毎に交差箇所の間隔を算出してもよい。
S120〜S124の後、S130に進む。
【0098】
S130において、高架下位置標定部160は、各交差箇所座標値と高架下道路で取得された慣性データ194とに基づいて高架下道路での計測車両200の走行位置を標定する(図5参照)。
S130の後、S141に進む。
【0099】
S141において、標定位置評価部162は、標定された計測車両200の走行位置を評価する。
例えば、S130においてODO/INS複合航法により計測車両200の走行位置が標定された場合、標定位置評価部162はODO/INS複合航法でカルマンフィルタ部161が推定した慣性データ194の誤差補正量と所定の補正量閾値とを比較する。標定位置評価部162は誤差補正量が補正量閾値より大きければ標定結果の精度が低い(NG)と判定し、誤差補正量が補正量閾値以下であれば標定結果の精度が高い(OK)と判定する。
また例えば、標定位置評価部162は、交差箇所間の走行位置の高低差が所定値より大きければ標定結果の精度が低い(NG)と判定し、交差箇所間の走行位置の高低差が所定値以下であれば標定結果の精度が高い(OK)と判定する。
S141の後、S142に進む。
【0100】
S142において、計測車両200の走行位置の評価結果が「OK」の場合、位置標定方法は終了する。
S142において、計測車両200の走行位置の評価結果が「NG」の場合、S143に進む。
【0101】
S143において、ランドマーク間隔決定部121はランドマーク間隔を狭める。
例えば、1回目のランドマーク間隔が「200メートル」である場合、ランドマーク間隔決定部121は2回目のランドマーク間隔を1回目の半分の「100メートル」にする。また例えば、ランドマーク間隔決定部121は1回目のランドマーク間隔から所定値(100メートル)を引いた「100メートル」を2回目のランドマーク間隔にする。また例えば、ランドマーク間隔決定部121は2回目のランドマーク間隔として予め定められた値を使用する。
S143の後、S120〜S124に戻る。
【0102】
S120〜S124では、処理対象とする普通道路を新たなランドマーク間隔に基づいて決定し、前回以前に処理済みの普通道路を除いて残りの普通道路に対して交差箇所座標値を算出する。
例えば、2回目のランドマーク間隔が「100メートル」である場合、図3において150メートル間隔で配置された普通道路b〜fを処理対象の普通道路とし、1回目に処理済みの普通道路b、d、fを除いて普通道路c、eについて交差箇所座標値を算出する。
【0103】
実施の形態2において、距離以外の値をランドマーク間隔に用いても構わない。例えば、処理を省略する普通道路の本数をランドマーク間隔として使用しても構わない。ランドマーク間隔が「2」であれば2つおきに普通道路を処理する。そして、評価結果が「NG」であればランドマーク間隔を「1」に減らし1つおきに普通道路を処理する。
【0104】
実施の形態2において、処理対象とする普通道路を間引くことにより処理時間を短縮し、利用者の作業量を軽減することができる。
また、標定位置の精度が基準を満たしていない場合に位置を標定し直すことにより、特定の基準を満たす標定位置を得ることができる。
【0105】
実施の形態3.
高架下道路を複数回走行した場合に、いずれかの回の走行時に取得した点群データを参照データにして、他の走行回での走行位置を標定する形態について説明する。
【0106】
図14、図15は、実施の形態3における計測車両200の走行経路を示す平面図である。
計測車両200は図14および図15に示す5つのルート(1)〜(5)を走行したものとする。高架下道路aは片側三車線の道路である。
図14において、ルート(1)は高架下道路aの中央車線、ルート(2)は高架下道路aの右車線、ルート(3)は高架下道路aの左車線を走行経路としている。
図15において、ルート(4)は普通道路fから高架下道路aに侵入し、普通道路dに抜ける経路であり、ルート(5)は普通道路dから高架下道路aに侵入する経路である。
【0107】
実施の形態3では、一つの高架下道路の走行経路(ルート(1))を普通道路の走行経路(ルート(4)(5))の点群データに基づいて標定し、その高架下道路の走行経路の点群データに基づいて他の高架下道路の走行経路(ルート(2)(3))を標定する。
【0108】
図16は、実施の形態3における走行経路標定方法を示すフローチャートである。
実施の形態3における走行経路標定方法について、図16に基づいて説明する。
【0109】
図16に示す処理符号は、実施の形態1で説明した位置標定方法(図5参照)の処理符号と対応している。したがって、処理符号が同じ処理は処理内容が同じである。処理内容の詳細については実施の形態1に記載している。
【0110】
<第一の位置標定処理>
まず、普通道路(ルート(4)(5))のGPS観測データ181に基づく走行位置と普通道路の距離方位点群データ183とに基づいて、普通道路の参照点群データ186を生成する(S110)。
また、第一の高架下道路(ルート(1))の慣性データ194に基づく走行位置と第一の高架下道路の距離方位点群データ193とに基づいて、第一の高架下道路の対象点群データ196を生成する(S111)。
次に、普通道路の参照点群データ186と第一の高架下道路の対象点群データ196とに基づいて交差箇所のランドマークを特定し、ランドマークの参照点の三次元座標値とランドマークの対象点の距離方位とに基づいて交差箇所の座標値を算出する(S120〜S124)。
そして、交差箇所の座標値と第一の高架下道路の慣性データ194とに基づいて第一の高架下道路の走行位置を標定する(S130)。
【0111】
<第二の位置標定処理>
さらに、第一の高架下道路の走行位置と第一の高架下道路の距離方位点群データ183とに基づいて、第一の高架下道路の三次元点群データを参照点群データ186として生成する(S110)。
また、第二の高架下道路(ルート(2)(3))の慣性データ194に基づく走行位置と第二の高架下道路の距離方位点群データ193とに基づいて、第二の高架下道路の対象点群データ196を生成する(S111)。
次に、第一の高架下道路の参照点群データ186と第二の高架下道路の対象点群データ196とに基づいて交差箇所のランドマークを特定し、ランドマークの参照点の三次元座標値とランドマークの対象点の距離方位とに基づいて交差箇所の座標値を算出する(S120〜S124)。
そして、交差箇所の座標値と第二の高架下道路の慣性データ194とに基づいて第二の高架下道路の走行位置を標定する(S130)。
【0112】
上記のように、第二の位置標定処理では、第一の高架下道路の三次元点群データを参照点群データ186にして第二の高架下道路の走行位置を標定している。
【0113】
上記の第一、第二の位置標定処理において、実施の形態2と同じく標定位置を評価し、評価結果が悪い場合にランドマーク間隔を狭めて交差箇所座標値の算出(S120〜S124)および走行位置の標定(S130)を繰り返しても構わない。
【0114】
図17は、実施の形態3における走行経路標定方法の効果を示す図である。
図17(1)は、標定前の走行位置に基づく高架下道路(図14のルート(1)〜(3))の白線の三次元点群をプロットした画像であり、図17(2)は、標定後の走行位置に基づく高架下道路の白線の三次元点群をプロットした画像である。
図17(1)に示すように標定前にはルート(1)〜ルート(3)それぞれで取得した白線の三次元点群がずれてしまうが、図17(2)に示すように標定後にはルート(1)〜ルート(3)それぞれで取得した白線の三次元点群がずれずに重なる。
したがって、実施の形態1または実施の形態2の位置標定方法は、衛星不可視時の走行経路を正しく標定することができる。
【符号の説明】
【0115】
100 位置標定装置、110 三次元点群復元部、120 交差箇所特定部、121 ランドマーク間隔決定部、130 交差箇所点群表示部、140 ランドマーク点特定部、150 交差箇所座標値算出部、160 高架下位置標定部、161 カルマンフィルタ部、162 標定位置評価部、180 参照データ記憶部、181 GPS観測データ、182 画像データ、183 距離方位点群データ、184 慣性データ、185 オドメトリデータ、186 参照点群データ、190 対象データ記憶部、191 GPS観測データ、192 画像データ、193 距離方位点群データ、194 慣性データ、195 オドメトリデータ、196 対象点群データ、200 計測車両、201 天板、210 GPS受信機、220 カメラ、230 レーザレーダ、240 慣性計測装置、250 オドメトリ、300 交差箇所指定画面、310 ランドマーク点指定画面、901 表示装置、902 キーボード、903 マウス、904 ドライブ装置、911 CPU、912 バス、913 ROM、914 RAM、915 通信ボード、920 磁気ディスク装置、921 OS、922 ウィンドウシステム、923 プログラム群、924 ファイル群、930 マウスカーソル。
【特許請求の範囲】
【請求項1】
測位衛星から測位信号を受信して受信結果を衛星観測データとして取得する受信機と、画像を撮像して撮像した画像を表す画像データを取得するカメラと、複数の計測点それぞれに対して距離と方位とを示す距離方位を計測して計測した複数の距離方位を示すデータを距離方位点群データとして取得するレーザレーダと、慣性測位に用いる慣性データを取得する慣性センサとを備える計測車両が走行した位置を標定する位置標定装置において、
前記計測車両により第一の道路で取得された画像データを記憶し、前記計測車両により前記第一の道路で取得された距離方位点群データに基づく参照点群データであって距離方位点群データに示される複数の距離方位に対応する複数の三次元座標値を示す参照点群データを記憶する参照データ記憶部と、
前記計測車両により第二の道路で取得された画像データと慣性データとを記憶し、前記計測車両により前記第二の道路で取得された距離方位点群データに基づく対象点群データであって距離方位点群データに示される複数の距離方位に対応する複数の三次元座標値を示す対象点群データを記憶する対象データ記憶部と、
前記参照データ記憶部に記憶される画像データに基づいて前記第一の道路と前記第二の道路とが交わる交差箇所で撮像された画像を参照画像として表示し、前記参照データ記憶部に記憶される参照点群データに基づいて複数の三次元座標値に対応する複数の計測点を複数の参照点として前記参照画像に重ねて表示し、前記対象データ記憶部に記憶される画像データに基づいて前記交差箇所で撮像された画像を対象画像として表示し、前記対象データ記憶部に記憶される対象点群データに基づいて複数の三次元座標値に対応する複数の計測点を複数の対象点として前記対象画像に重ねて表示する交差箇所点群表示部と、
前記交差箇所点群表示部により表示された複数の参照点のうち前記参照画像に特定の地物として映るランドマークに重ねて表示された参照点をランドマーク参照点として特定し、前記交差箇所点群表示部により表示された複数の対象点のうち前記対象画像内の前記ランドマークに重ねて表示された対象点をランドマーク対象点として特定するランドマーク点特定部と、
前記ランドマーク参照点に対応する三次元座標値と前記ランドマーク対象点に対応する距離方位とに基づいて、前記ランドマーク対象点に対応する距離方位を計測したときの前記計測車両の三次元座標値を交差箇所座標値として算出する交差箇所座標値算出部と、
前記交差箇所座標値算出部により算出された交差箇所座標値と前記対象データ記憶部に記憶される慣性データとを用いて慣性測位を行って前記計測車両が走行した前記第二の道路内の位置を前記第二の道路の走行位置として標定する位置標定部と
を備えたことを特徴とする位置標定装置。
【請求項2】
前記位置標定装置は、前記参照データ記憶部として、
測位衛星を遮蔽する遮蔽物が存在する衛星不可視道路と、前記衛星不可視道路と交わり測位衛星を遮蔽する遮蔽物が存在しない衛星可視道路とのうち、前記衛星可視道路を走行した前記計測車両により取得される前記衛星可視道路の衛星観測データと前記衛星可視道路の画像データと前記衛星可視道路の距離方位点群データとを記憶する衛星可視データ記憶部を備え、
前記位置標定装置は、前記対象データ記憶部として、
前記衛星不可視道路を走行した前記計測車両により取得される前記衛星不可視道路の画像データと前記衛星不可視道路の距離方位点群データと前記衛星不可視道路の慣性データとを記憶する衛星不可視データ記憶部を備え、
前記位置標定装置は、さらに、
前記衛星可視道路の衛星観測データに基づいて前記計測車両が走行した前記衛星可視道路内の位置を前記衛星可視道路の走行位置として測位し、測位した前記衛星可視道路の走行位置に基づいて前記衛星可視道路の距離方位点群データに示される複数の距離方位に対応する複数の計測点それぞれの三次元座標値を算出し、算出した複数の三次元座標値を示すデータを参照点群データとして生成する参照点群データ生成部と、
前記衛星不可視道路の慣性データに基づいて前記計測車両が走行した前記衛星不可視道路内の位置を前記衛星不可視道路の走行位置として測位し、測位した前記衛星不可視道路の走行位置に基づいて前記衛星不可視道路の距離方位点群データに示される複数の距離方位に対応する複数の計測点それぞれの三次元座標値を算出し、算出した複数の三次元座標値を示すデータを対象点群データとして生成する対象点群データ生成部とを備え、
前記交差箇所点群表示部は、
前記衛星可視道路と前記衛星不可視道路とが交わる交差箇所で撮像された画像を表す前記衛星可視道路の画像データを前記衛星可視データ記憶部から取得し、取得した前記衛星可視道路の画像データに基づいて前記交差箇所の画像を参照画像として表示し、前記参照点群データに示される複数の三次元座標値に対応する複数の計測点を複数の参照点として前記参照画像に重ねて表示し、前記交差箇所で撮像された画像を表す前記衛星不可視道路の画像データを前記衛星不可視データ記憶部から取得し、取得した前記衛星不可視道路の画像データに基づいて前記交差箇所の画像を対象画像として表示し、前記対象点群データに示される複数の三次元座標値に対応する複数の計測点を複数の対象点として前記対象画像に重ねて表示し、
前記ランドマーク特定部は、
前記交差箇所点群表示部により表示された複数の参照点のうち前記参照画像に特定の地物として映るランドマークに重ねて表示された参照点をランドマーク参照点として特定し、前記交差箇所点群表示部により表示された複数の対象点のうち前記対象画像内の前記ランドマークに重ねて表示された対象点をランドマーク対象点として特定し、
前記交差箇所座標値算出部は、
前記ランドマーク参照点に対応する三次元座標値と前記ランドマーク対象点に対応する距離方位とに基づいて、前記ランドマーク対象点に対応する距離方位が計測されたときに前記計測車両が位置していた地点の三次元座標値を交差箇所座標値として算出し、
前記位置標定部は、
前記交差箇所座標値算出部により算出された交差箇所座標値と前記衛星不可視道路の慣性データとを用いて慣性測位を行って前記計測車両が走行した前記衛星不可視道路内の位置を前記衛星不可視道路の走行位置として標定する
ことを特徴とする請求項1記載の位置標定装置。
【請求項3】
前記位置標定装置は、前記参照データ記憶部として、
測位衛星を遮蔽する遮蔽物が存在する衛星不可視道路と前記衛星不可視道路と交わり測位衛星を遮蔽する遮蔽物が存在しない衛星可視道路とのうち前記衛星可視道路を走行した前記計測車両により取得される前記衛星可視道路の画像データと、前記衛星可視道路の距離方位点群データに示される複数の距離方位に対応する複数の計測点それぞれの三次元座標値を示す参照点群データとを記憶する衛星可視データ記憶部を備え、
前記位置標定装置は、前記対象データ記憶部として、
前記衛星不可視道路を走行した前記計測車両により取得される前記衛星不可視道路の画像データと前記衛星不可視道路の距離方位点群データと前記衛星不可視道路の慣性データとを記憶する衛星不可視データ記憶部を備え、
前記位置標定装置は、さらに、
前記衛星不可視道路の慣性データに基づいて前記計測車両が走行した前記衛星不可視道路内の位置を前記衛星不可視道路の走行位置として測位し、測位した前記衛星不可視道路の走行位置に基づいて前記衛星不可視道路の距離方位点群データに示される複数の距離方位に対応する複数の計測点それぞれの三次元座標値を算出し、算出した複数の三次元座標値を示すデータを対象点群データとして生成する対象点群データ生成部を備え、
前記交差箇所点群表示部は、
前記衛星可視道路と前記衛星不可視道路とが交わる交差箇所で撮像された画像を表す前記衛星可視道路の画像データを前記衛星可視データ記憶部から取得し、取得した前記衛星可視道路の画像データに基づいて前記交差箇所の画像を参照画像として表示し、前記参照点群データに示される複数の三次元座標値に対応する複数の計測点を複数の参照点として前記参照画像に重ねて表示し、前記交差箇所で撮像された画像を表す前記衛星不可視道路の画像データを前記衛星不可視データ記憶部から取得し、取得した前記衛星不可視道路の画像データに基づいて前記交差箇所の画像を対象画像として表示し、前記対象点群データに示される複数の三次元座標値に対応する複数の計測点を複数の対象点として前記対象画像に重ねて表示し、
前記ランドマーク点特定部は、
前記交差箇所点群表示部により表示された複数の参照点のうち前記参照画像に特定の地物として映るランドマークに重ねて表示された参照点をランドマーク参照点として特定し、前記交差箇所点群表示部により表示された複数の対象点のうち前記対象画像内の前記ランドマークに重ねて表示された対象点をランドマーク対象点として特定し、
前記交差箇所座標値算出部は、
前記ランドマーク参照点に対応する三次元座標値と前記ランドマーク対象点に対応する距離方位とに基づいて、前記ランドマーク対象点に対応する距離方位が計測されたときに前記計測車両が位置していた地点の三次元座標値を交差箇所座標値として算出し、
前記位置標定部は、
前記交差箇所座標値算出部により算出された交差箇所座標値と前記衛星不可視道路の慣性データとを用いて慣性測位を行って前記計測車両が走行した前記衛星不可視道路内の位置を前記衛星不可視道路の走行位置として標定する
ことを特徴とする請求項1記載の位置標定装置。
【請求項4】
前記衛星可視データ記憶部は、複数の衛星可視道路それぞれの衛星観測データと画像データと距離方位点群データとを記憶し、
前記ランドマーク点特定部は、複数の衛星可視道路と前記衛星不可視道路との交差箇所毎に交差箇所にあるランドマークのランドマーク参照点とランドマーク対象点とを特定し、
前記交差箇所座標値算出部は、交差箇所毎に特定されたランドマーク参照点とランドマーク対象点とに基づいて交差箇所毎に交差箇所座標値を算出し、
前記位置標定部は、前記衛星不可視道路を交差箇所毎に区分けした前記衛星不可視道路の区間毎に、交差箇所に対応する交差箇所座標値と前記衛星不可視道路の当該区間で取得された慣性データとに基づいて前記衛星不可視道路の走行位置を標定する
ことを特徴とする請求項2または請求項3記載の位置標定装置。
【請求項5】
前記位置標定部は、複数の衛星可視道路のうち前記衛星不可視道路と所定の間隔で交わる複数の衛星可視道路それぞれの交差箇所で区分けした前記衛星不可視道路の区間毎に、前記衛星不可視道路の走行位置を標定し、
前記位置標定装置は、さらに、
前記位置標定部により標定された前記衛星不可視道路の走行位置が所定の精度を有しているか否かを判定する精度判定部を備え、
前記位置標定部は、前記精度判定部により前記衛星不可視道路の走行位置が所定の精度を有さないと判定された場合、複数の衛星可視道路のうち前記所定の間隔より狭い間隔で前記衛星不可視道路と交わる複数の衛星可視道路それぞれの交差箇所で区分けした前記衛星不可視道路の区間毎に、前記衛星不可視道路の走行位置を標定する
ことを特徴とする請求項4記載の位置標定装置。
【請求項6】
測位衛星から測位信号を受信して受信結果を衛星観測データとして取得する受信機と、画像を撮像して撮像した画像を表す画像データを取得するカメラと、複数の計測点それぞれに対して距離と方位とを示す距離方位を計測して計測した複数の距離方位を示すデータを距離方位点群データとして取得するレーザレーダと、慣性測位に用いる慣性データを取得する慣性センサとを備える計測車両が走行した位置を標定する位置標定方法において、
参照データ記憶部が、前記計測車両により第一の道路で取得された画像データを記憶し、前記計測車両により前記第一の道路で取得された距離方位点群データに基づく参照点群データであって距離方位点群データに示される複数の距離方位に対応する複数の三次元座標値を示す参照点群データを記憶し、
対象データ記憶部が、前記計測車両により第二の道路で取得された画像データと慣性データとを記憶し、前記計測車両により前記第二の道路で取得された距離方位点群データに基づく対象点群データであって距離方位点群データに示される複数の距離方位に対応する複数の三次元座標値を示す対象点群データを記憶し、
交差箇所点群表示部が、前記参照データ記憶部に記憶される画像データに基づいて前記第一の道路と前記第二の道路とが交わる交差箇所で撮像された画像を参照画像として表示し、前記参照データ記憶部に記憶される参照点群データに基づいて複数の三次元座標値に対応する複数の計測点を複数の参照点として前記参照画像に重ねて表示し、前記対象データ記憶部に記憶される画像データに基づいて前記交差箇所で撮像された画像を対象画像として表示し、前対象データ記憶部に記憶される対象点群データに基づいて複数の三次元座標値に対応する複数の計測点を複数の対象点として前記対象画像に重ねて表示し、
ランドマーク点特定部が、前記交差箇所点群表示部により表示された複数の参照点のうち前記参照画像に特定の地物として映るランドマークに重ねて表示された参照点をランドマーク参照点として特定し、前記交差箇所点群表示部により表示された複数の対象点のうち前記対象画像内の前記ランドマークに重ねて表示された対象点をランドマーク対象点として特定し、
交差箇所座標値算出部が、前記ランドマーク参照点に対応する三次元座標値と前記ランドマーク対象点に対応する距離方位とに基づいて、前記ランドマーク対象点に対応する距離方位を計測したときの前記計測車両の三次元座標値を交差箇所座標値として算出し、
位置標定部が、前記交差箇所座標値算出部により算出された交差箇所座標値と前記対象データ記憶部に記憶される慣性データとを用いて慣性測位を行って前記計測車両が走行した前記第二の道路内の位置を前記第二の道路の走行位置として標定する
ことを特徴とする位置標定方法。
【請求項7】
請求項6記載の位置標定方法をコンピュータに実行させる位置標定プログラム。
【請求項1】
測位衛星から測位信号を受信して受信結果を衛星観測データとして取得する受信機と、画像を撮像して撮像した画像を表す画像データを取得するカメラと、複数の計測点それぞれに対して距離と方位とを示す距離方位を計測して計測した複数の距離方位を示すデータを距離方位点群データとして取得するレーザレーダと、慣性測位に用いる慣性データを取得する慣性センサとを備える計測車両が走行した位置を標定する位置標定装置において、
前記計測車両により第一の道路で取得された画像データを記憶し、前記計測車両により前記第一の道路で取得された距離方位点群データに基づく参照点群データであって距離方位点群データに示される複数の距離方位に対応する複数の三次元座標値を示す参照点群データを記憶する参照データ記憶部と、
前記計測車両により第二の道路で取得された画像データと慣性データとを記憶し、前記計測車両により前記第二の道路で取得された距離方位点群データに基づく対象点群データであって距離方位点群データに示される複数の距離方位に対応する複数の三次元座標値を示す対象点群データを記憶する対象データ記憶部と、
前記参照データ記憶部に記憶される画像データに基づいて前記第一の道路と前記第二の道路とが交わる交差箇所で撮像された画像を参照画像として表示し、前記参照データ記憶部に記憶される参照点群データに基づいて複数の三次元座標値に対応する複数の計測点を複数の参照点として前記参照画像に重ねて表示し、前記対象データ記憶部に記憶される画像データに基づいて前記交差箇所で撮像された画像を対象画像として表示し、前記対象データ記憶部に記憶される対象点群データに基づいて複数の三次元座標値に対応する複数の計測点を複数の対象点として前記対象画像に重ねて表示する交差箇所点群表示部と、
前記交差箇所点群表示部により表示された複数の参照点のうち前記参照画像に特定の地物として映るランドマークに重ねて表示された参照点をランドマーク参照点として特定し、前記交差箇所点群表示部により表示された複数の対象点のうち前記対象画像内の前記ランドマークに重ねて表示された対象点をランドマーク対象点として特定するランドマーク点特定部と、
前記ランドマーク参照点に対応する三次元座標値と前記ランドマーク対象点に対応する距離方位とに基づいて、前記ランドマーク対象点に対応する距離方位を計測したときの前記計測車両の三次元座標値を交差箇所座標値として算出する交差箇所座標値算出部と、
前記交差箇所座標値算出部により算出された交差箇所座標値と前記対象データ記憶部に記憶される慣性データとを用いて慣性測位を行って前記計測車両が走行した前記第二の道路内の位置を前記第二の道路の走行位置として標定する位置標定部と
を備えたことを特徴とする位置標定装置。
【請求項2】
前記位置標定装置は、前記参照データ記憶部として、
測位衛星を遮蔽する遮蔽物が存在する衛星不可視道路と、前記衛星不可視道路と交わり測位衛星を遮蔽する遮蔽物が存在しない衛星可視道路とのうち、前記衛星可視道路を走行した前記計測車両により取得される前記衛星可視道路の衛星観測データと前記衛星可視道路の画像データと前記衛星可視道路の距離方位点群データとを記憶する衛星可視データ記憶部を備え、
前記位置標定装置は、前記対象データ記憶部として、
前記衛星不可視道路を走行した前記計測車両により取得される前記衛星不可視道路の画像データと前記衛星不可視道路の距離方位点群データと前記衛星不可視道路の慣性データとを記憶する衛星不可視データ記憶部を備え、
前記位置標定装置は、さらに、
前記衛星可視道路の衛星観測データに基づいて前記計測車両が走行した前記衛星可視道路内の位置を前記衛星可視道路の走行位置として測位し、測位した前記衛星可視道路の走行位置に基づいて前記衛星可視道路の距離方位点群データに示される複数の距離方位に対応する複数の計測点それぞれの三次元座標値を算出し、算出した複数の三次元座標値を示すデータを参照点群データとして生成する参照点群データ生成部と、
前記衛星不可視道路の慣性データに基づいて前記計測車両が走行した前記衛星不可視道路内の位置を前記衛星不可視道路の走行位置として測位し、測位した前記衛星不可視道路の走行位置に基づいて前記衛星不可視道路の距離方位点群データに示される複数の距離方位に対応する複数の計測点それぞれの三次元座標値を算出し、算出した複数の三次元座標値を示すデータを対象点群データとして生成する対象点群データ生成部とを備え、
前記交差箇所点群表示部は、
前記衛星可視道路と前記衛星不可視道路とが交わる交差箇所で撮像された画像を表す前記衛星可視道路の画像データを前記衛星可視データ記憶部から取得し、取得した前記衛星可視道路の画像データに基づいて前記交差箇所の画像を参照画像として表示し、前記参照点群データに示される複数の三次元座標値に対応する複数の計測点を複数の参照点として前記参照画像に重ねて表示し、前記交差箇所で撮像された画像を表す前記衛星不可視道路の画像データを前記衛星不可視データ記憶部から取得し、取得した前記衛星不可視道路の画像データに基づいて前記交差箇所の画像を対象画像として表示し、前記対象点群データに示される複数の三次元座標値に対応する複数の計測点を複数の対象点として前記対象画像に重ねて表示し、
前記ランドマーク特定部は、
前記交差箇所点群表示部により表示された複数の参照点のうち前記参照画像に特定の地物として映るランドマークに重ねて表示された参照点をランドマーク参照点として特定し、前記交差箇所点群表示部により表示された複数の対象点のうち前記対象画像内の前記ランドマークに重ねて表示された対象点をランドマーク対象点として特定し、
前記交差箇所座標値算出部は、
前記ランドマーク参照点に対応する三次元座標値と前記ランドマーク対象点に対応する距離方位とに基づいて、前記ランドマーク対象点に対応する距離方位が計測されたときに前記計測車両が位置していた地点の三次元座標値を交差箇所座標値として算出し、
前記位置標定部は、
前記交差箇所座標値算出部により算出された交差箇所座標値と前記衛星不可視道路の慣性データとを用いて慣性測位を行って前記計測車両が走行した前記衛星不可視道路内の位置を前記衛星不可視道路の走行位置として標定する
ことを特徴とする請求項1記載の位置標定装置。
【請求項3】
前記位置標定装置は、前記参照データ記憶部として、
測位衛星を遮蔽する遮蔽物が存在する衛星不可視道路と前記衛星不可視道路と交わり測位衛星を遮蔽する遮蔽物が存在しない衛星可視道路とのうち前記衛星可視道路を走行した前記計測車両により取得される前記衛星可視道路の画像データと、前記衛星可視道路の距離方位点群データに示される複数の距離方位に対応する複数の計測点それぞれの三次元座標値を示す参照点群データとを記憶する衛星可視データ記憶部を備え、
前記位置標定装置は、前記対象データ記憶部として、
前記衛星不可視道路を走行した前記計測車両により取得される前記衛星不可視道路の画像データと前記衛星不可視道路の距離方位点群データと前記衛星不可視道路の慣性データとを記憶する衛星不可視データ記憶部を備え、
前記位置標定装置は、さらに、
前記衛星不可視道路の慣性データに基づいて前記計測車両が走行した前記衛星不可視道路内の位置を前記衛星不可視道路の走行位置として測位し、測位した前記衛星不可視道路の走行位置に基づいて前記衛星不可視道路の距離方位点群データに示される複数の距離方位に対応する複数の計測点それぞれの三次元座標値を算出し、算出した複数の三次元座標値を示すデータを対象点群データとして生成する対象点群データ生成部を備え、
前記交差箇所点群表示部は、
前記衛星可視道路と前記衛星不可視道路とが交わる交差箇所で撮像された画像を表す前記衛星可視道路の画像データを前記衛星可視データ記憶部から取得し、取得した前記衛星可視道路の画像データに基づいて前記交差箇所の画像を参照画像として表示し、前記参照点群データに示される複数の三次元座標値に対応する複数の計測点を複数の参照点として前記参照画像に重ねて表示し、前記交差箇所で撮像された画像を表す前記衛星不可視道路の画像データを前記衛星不可視データ記憶部から取得し、取得した前記衛星不可視道路の画像データに基づいて前記交差箇所の画像を対象画像として表示し、前記対象点群データに示される複数の三次元座標値に対応する複数の計測点を複数の対象点として前記対象画像に重ねて表示し、
前記ランドマーク点特定部は、
前記交差箇所点群表示部により表示された複数の参照点のうち前記参照画像に特定の地物として映るランドマークに重ねて表示された参照点をランドマーク参照点として特定し、前記交差箇所点群表示部により表示された複数の対象点のうち前記対象画像内の前記ランドマークに重ねて表示された対象点をランドマーク対象点として特定し、
前記交差箇所座標値算出部は、
前記ランドマーク参照点に対応する三次元座標値と前記ランドマーク対象点に対応する距離方位とに基づいて、前記ランドマーク対象点に対応する距離方位が計測されたときに前記計測車両が位置していた地点の三次元座標値を交差箇所座標値として算出し、
前記位置標定部は、
前記交差箇所座標値算出部により算出された交差箇所座標値と前記衛星不可視道路の慣性データとを用いて慣性測位を行って前記計測車両が走行した前記衛星不可視道路内の位置を前記衛星不可視道路の走行位置として標定する
ことを特徴とする請求項1記載の位置標定装置。
【請求項4】
前記衛星可視データ記憶部は、複数の衛星可視道路それぞれの衛星観測データと画像データと距離方位点群データとを記憶し、
前記ランドマーク点特定部は、複数の衛星可視道路と前記衛星不可視道路との交差箇所毎に交差箇所にあるランドマークのランドマーク参照点とランドマーク対象点とを特定し、
前記交差箇所座標値算出部は、交差箇所毎に特定されたランドマーク参照点とランドマーク対象点とに基づいて交差箇所毎に交差箇所座標値を算出し、
前記位置標定部は、前記衛星不可視道路を交差箇所毎に区分けした前記衛星不可視道路の区間毎に、交差箇所に対応する交差箇所座標値と前記衛星不可視道路の当該区間で取得された慣性データとに基づいて前記衛星不可視道路の走行位置を標定する
ことを特徴とする請求項2または請求項3記載の位置標定装置。
【請求項5】
前記位置標定部は、複数の衛星可視道路のうち前記衛星不可視道路と所定の間隔で交わる複数の衛星可視道路それぞれの交差箇所で区分けした前記衛星不可視道路の区間毎に、前記衛星不可視道路の走行位置を標定し、
前記位置標定装置は、さらに、
前記位置標定部により標定された前記衛星不可視道路の走行位置が所定の精度を有しているか否かを判定する精度判定部を備え、
前記位置標定部は、前記精度判定部により前記衛星不可視道路の走行位置が所定の精度を有さないと判定された場合、複数の衛星可視道路のうち前記所定の間隔より狭い間隔で前記衛星不可視道路と交わる複数の衛星可視道路それぞれの交差箇所で区分けした前記衛星不可視道路の区間毎に、前記衛星不可視道路の走行位置を標定する
ことを特徴とする請求項4記載の位置標定装置。
【請求項6】
測位衛星から測位信号を受信して受信結果を衛星観測データとして取得する受信機と、画像を撮像して撮像した画像を表す画像データを取得するカメラと、複数の計測点それぞれに対して距離と方位とを示す距離方位を計測して計測した複数の距離方位を示すデータを距離方位点群データとして取得するレーザレーダと、慣性測位に用いる慣性データを取得する慣性センサとを備える計測車両が走行した位置を標定する位置標定方法において、
参照データ記憶部が、前記計測車両により第一の道路で取得された画像データを記憶し、前記計測車両により前記第一の道路で取得された距離方位点群データに基づく参照点群データであって距離方位点群データに示される複数の距離方位に対応する複数の三次元座標値を示す参照点群データを記憶し、
対象データ記憶部が、前記計測車両により第二の道路で取得された画像データと慣性データとを記憶し、前記計測車両により前記第二の道路で取得された距離方位点群データに基づく対象点群データであって距離方位点群データに示される複数の距離方位に対応する複数の三次元座標値を示す対象点群データを記憶し、
交差箇所点群表示部が、前記参照データ記憶部に記憶される画像データに基づいて前記第一の道路と前記第二の道路とが交わる交差箇所で撮像された画像を参照画像として表示し、前記参照データ記憶部に記憶される参照点群データに基づいて複数の三次元座標値に対応する複数の計測点を複数の参照点として前記参照画像に重ねて表示し、前記対象データ記憶部に記憶される画像データに基づいて前記交差箇所で撮像された画像を対象画像として表示し、前対象データ記憶部に記憶される対象点群データに基づいて複数の三次元座標値に対応する複数の計測点を複数の対象点として前記対象画像に重ねて表示し、
ランドマーク点特定部が、前記交差箇所点群表示部により表示された複数の参照点のうち前記参照画像に特定の地物として映るランドマークに重ねて表示された参照点をランドマーク参照点として特定し、前記交差箇所点群表示部により表示された複数の対象点のうち前記対象画像内の前記ランドマークに重ねて表示された対象点をランドマーク対象点として特定し、
交差箇所座標値算出部が、前記ランドマーク参照点に対応する三次元座標値と前記ランドマーク対象点に対応する距離方位とに基づいて、前記ランドマーク対象点に対応する距離方位を計測したときの前記計測車両の三次元座標値を交差箇所座標値として算出し、
位置標定部が、前記交差箇所座標値算出部により算出された交差箇所座標値と前記対象データ記憶部に記憶される慣性データとを用いて慣性測位を行って前記計測車両が走行した前記第二の道路内の位置を前記第二の道路の走行位置として標定する
ことを特徴とする位置標定方法。
【請求項7】
請求項6記載の位置標定方法をコンピュータに実行させる位置標定プログラム。
【図1】


【図2】
【図3】
【図4】

【図5】

【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】

【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2011−252833(P2011−252833A)
【公開日】平成23年12月15日(2011.12.15)
【国際特許分類】
【出願番号】特願2010−127887(P2010−127887)
【出願日】平成22年6月3日(2010.6.3)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年12月15日(2011.12.15)
【国際特許分類】
【出願日】平成22年6月3日(2010.6.3)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]