
位置決定におけるアンビギティーの解決方法
【課題】ノイズの有無にかかわらず環境における位置決定におけるアンビギティーを解決するための様々なヒューリスティック技術を使用する方法を提供すること。
【解決手段】最終的な位置決定解は、複数の曖昧な位置決定解から、クロック時間バイアス値を使用することにより、到着時間、そして/または、測距信号の受信電力レベルなどの測距信号順序に関する一貫性情報を使用することにより、ソースに距離を使用することにより、そして/または、最終的な位置決定解を選択するのに他の弁別器機能を使用することによって、1組の曖昧な位置決定解から決定しても良い。ヒューリスティックなアプローチの主要な利点は、余分な測定が位置決定解のアンビギティーの解消に必要でないということである。
【解決手段】最終的な位置決定解は、複数の曖昧な位置決定解から、クロック時間バイアス値を使用することにより、到着時間、そして/または、測距信号の受信電力レベルなどの測距信号順序に関する一貫性情報を使用することにより、ソースに距離を使用することにより、そして/または、最終的な位置決定解を選択するのに他の弁別器機能を使用することによって、1組の曖昧な位置決定解から決定しても良い。ヒューリスティックなアプローチの主要な利点は、余分な測定が位置決定解のアンビギティーの解消に必要でないということである。
【発明の詳細な説明】
【技術分野】
【0001】
本願は、2004年11月17日に出願された米国特許出願No.60/029,011に対して優先権を有する。
【0002】
開示された課題は、一般的に、位置決定に対する方法に関し、特に、ノイズの有無にかかわらない環境において、位置決定におけるアンビギティーを解決する様々なヒューリスティック技術を使用する方法に関連する。
【0003】
本発明は、位置決定におけるアンビギティーの解決方法に関する。
【背景技術】
【0004】
距離ベースの位置決定システムでは、複数のソースからの測距信号の測定は、各測距信号のソースに関連する距離情報に変換される。既知の位置を有する異なるソースへの距離は、例えば、三辺測量(別名:三角測量)として既知の幾何技術を介して、未知のユーザ位置を解明するために結合される。測距信号の遅延を確実に知ることができないのであれば(例えば、ユーザクロックがネットワークに同期しない非同期システムにおいて)、位置決定アルゴリズムは、追加測定を使用して、三辺測量プロセスによって解決すべき他の未知数としてユーザクロック時間バイアスを扱っても良い。
【0005】
しかしながら、位置決定システムは、利用者座標の1つ以上の位置決定解集合とクロック時間バイアスが1組の距離測定と一致しているかどうか曖昧である。位置決定システムは3つの異なった方法で曖昧な位置決定解を生成することができ、1番目に、アンビギティーが不十分な測定値によって引き起こされることができ、2番目に、アンビギティーが位置決定で採用されたアルゴリズムの性質によって導入されても良く、3番目に、アンビギティーがノイズ測定値の存在によって導入されても良い。
【0006】
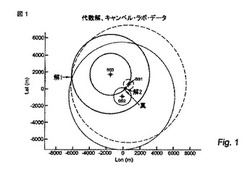
1番目に、未知数の数が独立している測定値の数以上である時に、システムは、不十分な数の測定値を有する。例えば、未知数が二次元ユーザ空間座標とユーザクロック時間バイアスであるケースを考慮する。図1に示したケースを考慮する。3つの未知数、すなわち、移動局緯度、経度、およびクロック時間バイアスがある。3つの基地局、すなわち、BS1、BS2、BS3、と、3つの関連距離測定値とがある。円は、移動局で測定されたような移動局と基地局の間の距離と適当な解に対応する計算されたクロック時間バイアスとの合計によって与えられた半径を有する特定の基地局の中心に置かれた状態でプロットされる。3つの独立している距離測定が与えられると、それぞれの組の円の論理積で示した2つの可能な位置決定解がある。
【0007】
2番目に、ユーザを位置決めするのに使用されるアルゴリズムの本質は、アンビギティーのソースであることが可能である。アンビギティーに影響されやすい公知のアルゴリズムは、米国特許6,289,280に記載されている。このアルゴリズムは、閉形式連立方程式を使用する未知数について解いている。それはユーザ位置について代数的に解くので、このアルゴリズムは効率的に動作して、時間又はリソースの制限を有するアプリケーションと装置に適している。解は、方程式の数が未知数の数と等しい二次方程式のシステムに測定値を結合するのに線型代数操作を使用する。2つの解が、二次方程式の2つのルートに関連して生成される。2つの解が、追加の手段で解くべき必要がある曖昧な解の組を形成する。
【0008】
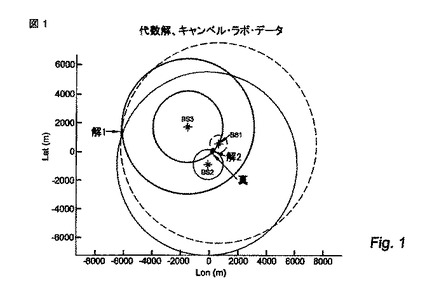
例えば、未知数が二次元ユーザ空間座標とユーザクロック時間バイアスであるケースを考慮する。4つの測定値で、システムは、ユーザ位置を明白に解くための十分な数の測定値を有しているといっても良い。しかし、代数的手法が使用されているときに、4つの測定値が3つの「平均した」測定値に結合され、図2に示すように、これらの平均に対応する2つの解が特定される。
【0009】
3番目に、ノイズ測定値は、ユーザ位置の決定における誤差に導くことができる。ノイズを既知の又は計算可能な統計パラメータを有する離散変数であると仮定することによって、雑音環境における位置決め決定方法を考慮する。1組の調整された測定値と対応する解は、各仮定された雑音レベルに対して生成される。そのような位置決定システムは曖昧であって、その結果、同様に、アンビギティー解決技術を保証する。例えば、図3において、基地局BS2からの測定値に関連する各100メートル離れた3つの雑音レベルを考慮する。各雑音レベルについて、1組の円は、距離測定値(BS2の場合では、この測定値は仮定された雑音レベルによって調整される)と計算されたクロック時間バイアスとの合計に対応する半径で、前述のようにプロットされる。円の論理積によって示された各雑音レベルに関連する3つの曖昧な解がある。
【0010】
3番目に、ノイズ測定値は、ユーザ位置の決定における誤差に導くことができる。ノイズを既知の又は計算可能な統計パラメータを有する離散変数であると仮定することによって、雑音環境における位置決め決定方法を考慮する。1組の調整された測定値と対応する解は、各仮定された雑音レベルに対して生成される。そのような位置決定システムは曖昧であって、その結果、同様に、アンビギティー解決技術を保証する。例えば、図3において、基地局BS2からの測定値に関連する各100メートル離れた3つの雑音レベルを考慮する。各雑音レベルについて、1組の円は、距離測定値の合計(BS2の場合では、この測定値は仮定された雑音レベルによって調整される)と計算されたクロック時間バイアスに対応する半径で、前述のようにプロットされる。円の論理積によって示された各雑音レベルに関連する3つの曖昧な解がある。
【0011】
従って、1つの可能な解がこれらの先行技術のアルゴリズムで提示すので、1組の曖昧な位置決定解から正しい(別名:最終)位置決定解を選択する方法を提供することは望ましいだろう。
【発明の概要】
【0012】
開示されているのは、1組の曖昧な位置決定解から様々なヒューリスティックス、そして/または、雑音除去を使用することで正しい(別名:最終)位置決定解を選択するための方法である。
【0013】
1つの局面によれば、クロック時間バイアス値を使用してN個の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法は、ステップを含んでおり、クロック時間バイアスに対する確率分布関数(PDF)モデルを生成し、N個の曖昧な位置決定解に対するN個のクロック時間バイアス値を取得し、それぞれのN個のクロック時間バイアス値を前記PDFモデルに挿入し、前記PDFモデルを評価して、N個のPDF値を得て、前記N個のPDF値にN個の優良距離(goodness metrics)を設定し、前記N個の優良距離を比較し、前記N個の優良距離の最大値として最大の優良距離を定義し、前記最大の優良距離を有する最終的な位置決定解を選択する。
【0014】
もう1つの局面によれば、複数の測距信号(ranging signals)の受信(別名:到着時間)順序を使用して複数の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法は、以下のステップを含み、最早から最新までの実際の到着時刻の順序(TOA)に基づいて複数の測距信号を格付けし、それぞれの複数の曖昧な位置決定解に対応する到着時間の期待順序(expected order)に基づいて複数の測距信号を格付けし、実際の到着時刻の順序(TOA)に基づき、それぞれの複数の曖昧な位置決定解に対応する到着時間の期待順序に基づいて測距信号のランキングを比較する。
【0015】
さらに他の1つの局面によれば、複数の測距信号の受信電力レベルの順序を使用して複数の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法は、以下のステップを含み、最強から最弱までの受信電力レベルの順序に基づいて複数個の測距信号を格付けし、それぞれの複数の曖昧な位置決定解に対応する受信電力レベルの期待順序に基づいて複数の測距信号を格付けし、受信電力レベルの順序に基づいて、そして、それぞれの複数の曖昧な位置決定解に対応する受信電力レベルの期待順序に基づいて測距信号のランキングを比較する。
【0016】
更に他の局面によれば、複数の曖昧な位置決定解での位置決定におけるアンビギティーを解決する方法は、以下のステップを含み、それぞれM個のソースに対するそれぞれの複数の曖昧な位置決定解に対応する複数の距離D1を導きだし、複数の元の距離D2を得て、それぞれの複数の距離D1とそれぞれのその対応する複数の元の距離D2とを比較して、複数の誤差測定を計算し、複数の誤差測定の最も低い値を有するような最終的な位置決定解を選択する。
【0017】
さらに他の局面によると、雑音環境における位置決定におけるアンビギティーを解決する方法は、以下のステップを含み、範囲[A,B]内での繰り返しで、Q個の測距信号の1番目に対して増分1で、L個の雑音を選択し、複数のL個の雑音レベルを生成するために、(Q−1)個の測距信号の残りのそれぞれについて、(Q−1)回の選択ステップを繰り返し、幾何技術(geometric technique)に基づいてそれぞれの複数のL個の雑音レベルについて複数の曖昧な位置決定解を作成し、弁別器機能に基づいて前記複数の曖昧な位置決定解から最終的な位置決定解を選択する。
【0018】
他の実施形態が、以下の詳細な記述から容易に当業者に明らかになるのが理解されるだろうし、それは実例として示され記載された様々な実施形態である。図面と詳細な記載は、当然実例としてみなされ、制限をするものとしてはみなされない。
【図面の簡単な説明】
【0019】
【図1】図1は、未知のユーザ空間座標と2つの曖昧な位置決定解を有するクロック時間バイアス値とを有する3つの測定値の例を示す図である。
【図2】図2は、2つの曖昧な位置決定解での3つの未知数を有する4つの測定値の例を示す図である。
【図3】図3は、3つの曖昧な位置決定解を有するノイズ測定値の例を示す図である。
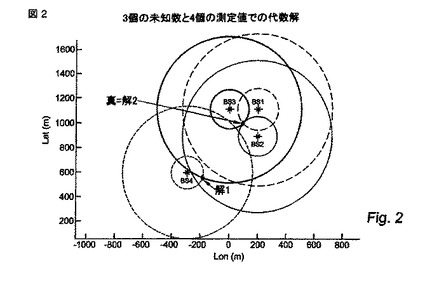
【図4】図4は、マンハッタンデータセットに対して、クロック時間バイアス値とそれぞれの曖昧な位置決定解に対する水平誤差との関係を示す図である。
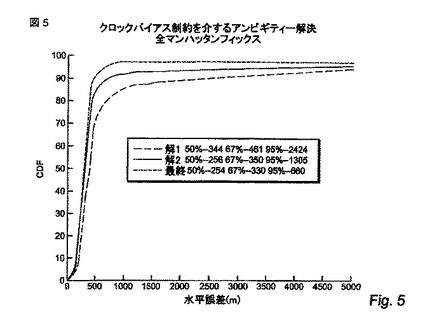
【図5】図5は、クロック時間バイアス値の制約条件を介してアンビギティーを解決することによって、2つの曖昧な位置決定解(解#1と解#2)と選択された最終的な位置決定解の統計的性能を示す図であって、マンハッタンデータセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされる。
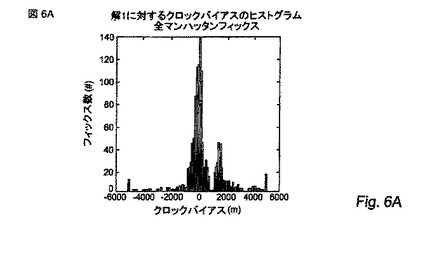
【図6A】図6Aは、マンハッタンデータセットに対して2つの曖昧な位置決定解の解#1で生成されたクロック時間バイアスのヒストグラムを示す図である。
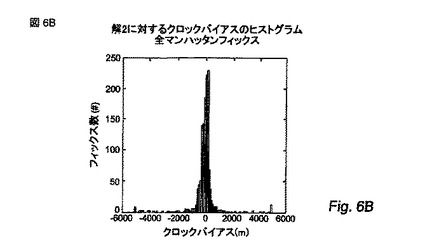
【図6B】図6Bは、マンハッタンデータセットに対して2つの曖昧な位置決定解の解#2で生成されたクロック時間バイアスのヒストグラムを示す図である。
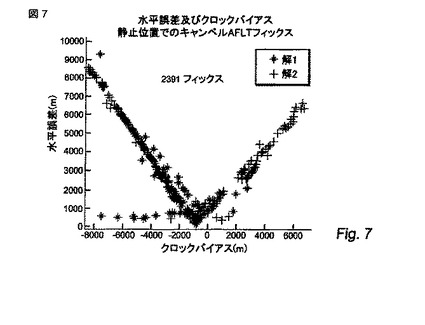
【図7】図7は、キャンベルデータセットに対するそれぞれの曖昧な位置決定解に対するクロック時間バイアス値と水平誤差との関係を示す図である。
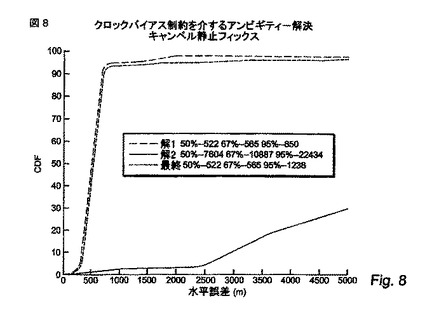
【図8】図8は、クロック時間バイアス値の制約条件を介してアンビギティーを解決することによって、2つの曖昧な位置決定解(解#1と解#2)と選択された最終的な位置決定解の統計的性能を示す図であって、キャンベルデータセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされる。
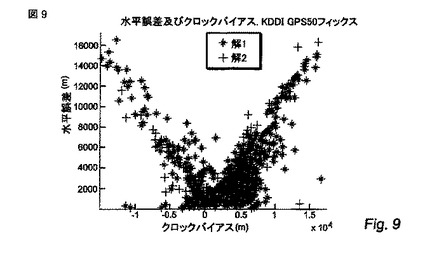
【図9】図9は、日本データセットに対するそれぞれの曖昧な位置決定解に対するクロック時間バイアス値と水平誤差との関係を示す図である。
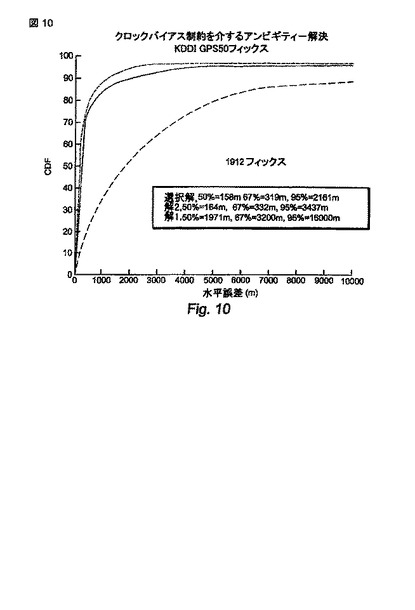
【図10】図10は、クロック時間バイアス値の制約条件を介してアンビギティーを解決することによって、2つの曖昧な位置決定解(解#1と解#2)と選択された最終的な位置決定解の統計的性能を示す図であって、キャンベルデータセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされる。
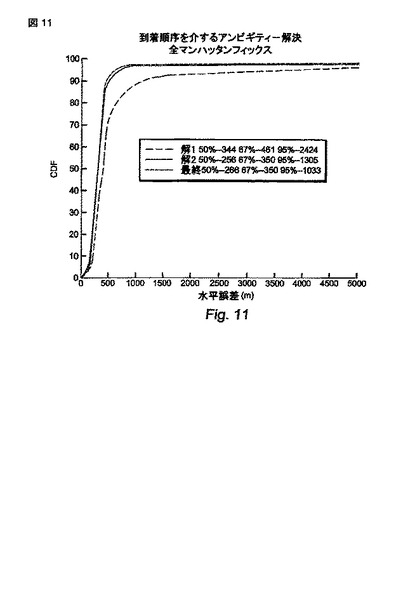
【図11】図11は、測距信号到着の順に一貫性を介してアンビギティーを解決することによって、2つの曖昧な位置決定解(解#1と解#2)と選択された最終的な位置決定解の統計的性能を示す図であって、マンハッタンデータセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされる。
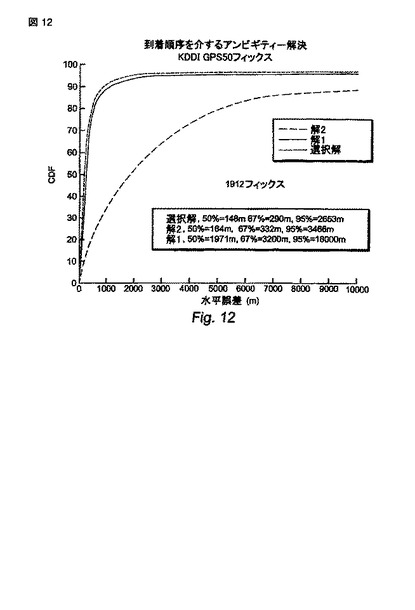
【図12】図12は、測距信号到着の順に一貫性を介してアンビギティーを解決することによって、2つの曖昧な位置決定解(解#1と解#2)と選択された最終的な位置決定解の統計的性能を示す図であって、日本データセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされる。
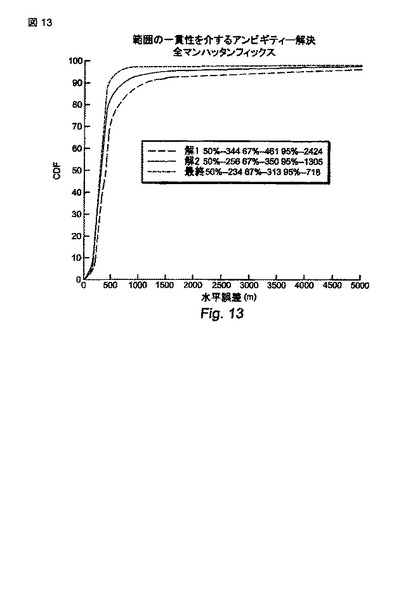
【図13】図13は、距離値の一貫性を介してアンビギティーを解決することによって、2つの曖昧な位置決定解(解#1と解#2)と選択された最終的な位置決定解の統計的性能を示す図であって、マンハッタンデータセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされる。
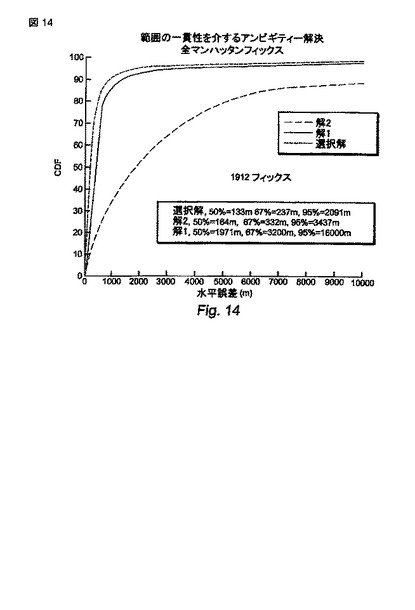
【図14】図14は、距離値の一貫性を介してアンビギティーを解決することによって、2つの曖昧な位置決定解(解#1と解#2)と選択された最終的な位置決定解の統計的性能を示す図であって、日本データセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされる。
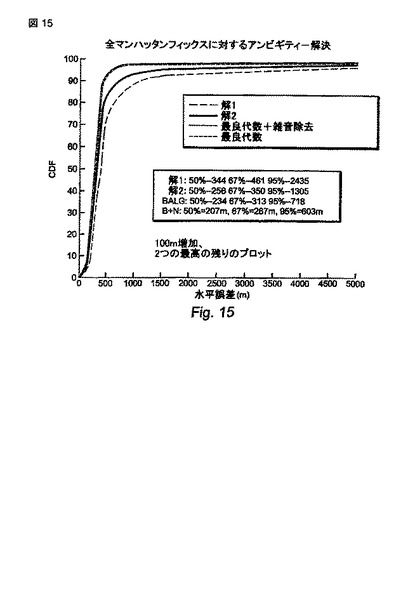
【図15】図15は、雑音除去の有無にかかわらず最も良い曖昧な位置決定解での2つの曖昧な位置決定解(解#1と解#2)の統計的性能を示す図であって、マンハッタンデータセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされる。
【発明を実施するための形態】
【0020】
添付図面に関する以下の記載は、発明の様々な実施形態の記載として意図しており、発明を実施しても良い唯一の実施形態を表すことを意図していない。各実施形態は、単に例示又は図示として提供しており、必ずしも他の実施形態において好ましいとか又は効果的であるというように解釈するべきであるというわけではない。特定の詳細な記載は、発明の理解を提供するのに使用される。しかしながら、発明がこれらの特定の詳細な記載なしで実施されるのは当業者に明らかになる。頭字語と他の描写的である用語論は、単に便宜と明快のために使用されても良く、発明の範囲を制限することを意図しない。
【0021】
アンビギティーの解決に対する様々なヒューリスティックなアプローチにより、1つ以上の未知数又は組合せの既知の又は予想される振る舞い、様々な定量化可能なパラメータの一貫性(consistency)、そして/または、測定値又は測定の中の異なったパラメータからの冗長度を活用することを開示する。開示されたヒューリスティックなアプローチの主な利点は、余分な測定が位置決定解のアンビギティーの解消の目的に対して必要ではないということである。
【0022】
図示だけの目的のために、マンハッタン、日本、およびキャンベルから実際のユーザデータを使用するシミュレーションを示す。マンハッタンデータベースは、1ロケーションあたり約20〜100の位置フィックス(position fixes)で、都市をまたがる約25のロケーションからの1316のフィックス(fixes)から成る。日本データセットは、全日本からの約1912のフィックスから成る。キャンベルデータセットは、約2000のフィックスで静止した位置から成る。
【0023】
1つの実施形態では、アンビギティーの解決に対する方法は、いくつかの未知数とそれらの組合せの振る舞いにおける物理的制約を使用する。特に、非同期システムは、ユーザ位置(user location)のアンビギティーを除くのに利用可能なクロック時間バイアス値に関する1組の仮定又は情報の利益を得ることができる。ユーザクロックタイミングが何らかの参照タイミング信号から学習されるシステムでは、ユーザクロック時間バイアス値は、参照タイミング信号が参照タイミング信号のソースからユーザまで伝播するのに要する時間、何らかの多重伝搬送路、及び、受信処理オーバヘッド、およびクロックスルーイング誤差(clock slewing error)を含んでも良い。クロック時間バイアス値の確率分布関数(PDF)は、そのネットワークに対して導き出だされ、ユーザ位置を明確にするのに使用することができる。
【0024】
ユーザクロック時間バイアス値は、受信機設計、ユーザクロック設計特性、多重伝搬送路、等の様々な要素によって指図された分布パラメータで既知の統計分布で、そして、地上系では、基地局密度などのネットワーク展開問題で特徴付けられても良い。分布パラメータは、静的に設定しても良いし、与えられた位置確認システムに対して動的に学習しても良い。最終的な位置決定解に関する優良距離(goodness metric)は、計算されたクロック時間バイアス値の値とシナリオに対するクロック時間バイアス値の確率分布関数(PDF)とから導き出すことができる。
【0025】
N個のクロック時間バイアス値を使用して1組のN個の曖昧な位置決定解からの最終的な位置決定解を決定するために、以下のステップが必要であって、1番目に、N個のクロック時間バイアス値に対する確率分布関数(PDF)モデルを生成している。1つの実施形態では、PDFモデルはその平均と標準偏差によってパラメータ化される。2番目に、それぞれのN個の曖昧な位置決定解に対して、クロック時間バイアス値を得ると、結果としてN個のクロック時間バイアス値になる。3番目に、それぞれの曖昧な位置決定解に対して、対応するクロック時間バイアス値をPDFモデルに挿入する。4番目に、それぞれの曖昧な位置決定解に対して、挿入されたクロック時間バイアス値でのPDFモデルを評価して、PDF値を得る。その結果は、N個のクロック時間バイアス値に対するN個のPDF値であるべきである。5番目に、それぞれの曖昧な位置決定解に対して、曖昧な位置決定解に関する優良距離をPDF値に設定する。更にまた、時間バイアスが評価するN個のクロックに対応するN個のPDF値に対応するN個の優良距離があるべきである。6番目に、N個の優良距離の最大値として、N個の優良距離と定義された最大の優良距離を比較する。7番目に、最大の優良距離を有する曖昧な位置決定解から最終的な位置決定解を選択する。数量Nは1を越える整数と定義される。
【0026】
1つの実施形態では、クロック時間バイアス値は、それぞれマイナス100メートルと100メートルの平均と標準偏差を有するガウス確率分布関数(PDF)を追従するようにモデル化される。もし、計算されたクロック時間バイアス値(光の速さが掛けられる)が、マイナス200メートルであれば、優良距離は、平均から離れたガウス確率分布関数の1つの標準偏差の値へ設定することができる。当業者は、ガウス形PDF(例えば、統計パラメータの有限集合)以外の他のPDFを使用しても良いのが分かるだろう。
【0027】
一例では、クロック時間バイアス値は、ある値Aと他の値Bとの間で許されるクロック時間バイアス値で、静的で、簡単な一様分布を有するものと仮定する。マンハッタンとキャンベルデータセットにおいて、AとBはマイナス1000メートルと1000メートルにそれぞれ設定される。日本の場合では、経験的に観測されるように日本データセットにより良く合うように、AとBはマイナス2000メートルと100メートルに設定される。マンハッタンデータセットに関して、クロック時間バイアス値と、それぞれの曖昧な位置決定解の水平誤差との関係を、図4に示す。大きい誤差については、クロック時間バイアス値上では、一般的に、強い誤差の直線的な依存があるのが観測される。マンハッタンデータセットについては、性能結果を図5に示す。最終的な位置決定解が、全体のデータセットにまたがる2つの曖昧な位置決定解のどちらかより統計的に優れているので、アンビギティーの解消アルゴリズムがうまくいくのが観測される。「解2」とラベルされた曖昧な位置決定解は、一般的に、「解1」とラベルされた曖昧な位置決定解より優れている。そのような矛盾は、図6Aと図6Bに示すように、それぞれの曖昧な位置決定解によって生成されるようなクロック時間バイアス値の振る舞いによって、明らかであり、説明可能である。1番目の曖昧な位置決定解が非常に変化する結果を生成した一方で、2番目の曖昧な位置決定解が「きつい」分布をどのように有しているかが分かる。
【0028】
図7はキャンベルデータセットに対するそれぞれの曖昧な位置決定解に対するクロック時間バイアス値、水平誤差との関係を示す図である。図8は、2つの曖昧な位置決定解(解#1と解#2)とキャンベルデータセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされた、選択された最終的な位置決定解の統計的性能を示す図である。日本データセットについては、図9はそれぞれの曖昧な位置決定解に対するクロック時間バイアス値、水平誤差との関係を示す図である。一方、図10は、2つの曖昧な位置決定解(解#1と解#2)とメートルでの水平誤差の累積分布関数(CDF)としてプロットされた、選択された最終的な位置決定解の統計的性能を示す図である。
【0029】
アンビギティーの解決に対する代替方法は、測距信号順序の一貫性を使用する。測距信号の到着時間(TOA)、そして/または、測距信号の電力レベルのような測距信号順序を得るための様々な方法がある。
【0030】
1つの実施形態では、アンビギティーの解決に対する方法は、アンビギティーを除去するのに複数のソースからの測距信号の受信(別名:到着時間)の順序を使用する。各解に対応する期待順序は、測距信号が受信されている実際の順序で得られて、比較される。選択された最終的な位置決定解は、順序付けに最も一致するもの、または順序付けに最も一致する複数の曖昧な位置決定解の組合せである。
【0031】
測距信号の受信の順序(別名:到着時間)を使用する1組の曖昧な位置決定解からの最終的な位置決定解を決定するために、以下のステップが必要である。1番目に、最早から最新までの実際の到着時刻の順序(TOA)に基づいて測距信号を格付けする。2番目に、それぞれの曖昧な位置決定解に対して、それぞれの曖昧な位置決定解に対応する到着時間の期待順序に基づいて測距信号を格付けする。3番目に、最早から最新までの実際の到着時刻の順序(TOA)における測距信号のランキングと、それぞれの曖昧な位置決定解に対応する到着の期待順序に基づく測距信号のランキングとを比較する。4番目に、順序付けに最も一致するもの、または順序付けに最も一致する複数の曖昧な位置決定解の組合せとして最終的な位置決定解を選択する。
【0032】
一例では、後天的な測距信号順序は、到達時間(TOA)の情報から得られた先験的な測距信号順序と比較される。それぞれの測距信号に関しては、先験的及び後天的なリストの中のランキングは、比較されて、一致の場合には「1」、不一致の場合には「0」とラベルされる。すべての測距信号にわたって最も一致(すなわち、最大で「1」)する解は、位置決定解として選ばれる。タイ(tie)の場合には、平均が使用される。マンハッタンデータセットに適用されたこのアンビギティーの解決技術に対する結果は、図11に示されており、日本データセットについては、図12に示されている。一般的に、最終的な位置決定解は、同様であるか、または2つの曖昧な位置決定解のどちらかより統計的に優れている。
【0033】
他の実施形態では、アンビギティーの解決に対する方法は、曖昧な位置決定解の間で区別するのに、測距信号の受信電力レベルを使用する。1つは、位置決定解の間で区別するのに受信電力レベルを使用しても良い。測距信号の受信電力レベルを使用する1組の曖昧な位置決定解からの最終的な位置決定解を決定するために、以下のステップが必要である。1番目に、最強から最弱まで、受信された受信電力レベルの順序に基づいて測距信号を格付けする。2番目に、それぞれの曖昧な位置決定解に対して、それぞれの曖昧な位置決定解に対応する受信電力レベルの期待順序に基づいて測距信号を格付けする。受信電力レベルの期待順序は、それぞれの曖昧な位置決定解に対応する到着時間の期待順序と同じであると仮定する。3番目に、最強から最弱まで受信された受信電力レベルの順序における測距信号のランキングとそれぞれの曖昧な位置決定解に対応する受信電力レベルの期待順序に基づく測距信号のランキングとを比較する。4番目に、順序付けに最も一致するもの、または順序付けに最も一致する複数の曖昧な位置決定解の組合せとして最終的な位置決定解を選択する。
【0034】
他の実施形態では、アンビギティーの解決に対する方法は、アンビギティーを取り除くのにM個のソースとその組合せに距離の数値を使用する。それぞれの曖昧な位置決定解に対応するそれぞれのM個のソースにそれぞれの距離D1を導き出して、クロック時間バイアス値(元の距離D2としてラベルされる)によって調整された元の距離とそれらを比較できる。ソースの数量はMで定義され、Mは1より大きい整数である。((D1−D2)の平方二乗平均又は(D1−D2)の平方平均によって定義されるように)最も近い一致する曖昧な位置決定解、または最も近い一致する複数の値の何らかの組合せが最終的な位置決定解として選ばれている。本発明が、(D1−D2)の平方二乗平均又は二乗平均に限定されないか、限定はされないが平方二乗和(RSS)又は二乗和(SS)のような他の誤差測定を本発明の要旨を変更せずに使用してもよいことは、当業者にとって明らかであることが分かるであろう。マンハッタンと日本データセットに対する結果を図13と図14にそれぞれ示す。どちらの場合も、最終的な位置決定解は、全体のデータセットにまたがる2つの曖昧な位置決定解のどちらかより統計的に優れている。
【0035】
距離の数値を使用する1組の曖昧な位置決定解からM個のソースまで最終的な位置決定解を決定するために、以下のステップが必要である。1番目に、それぞれのM個のソースに対して、それぞれの曖昧な位置決定解に対応する距離D1を引き出す。2番目に、(クロック時間バイアス値で調整された元の距離)元の距離D2を得る。3番目に、元の距離D2と距離D1を比較し、これらの誤差測定を計算する。1つの実施形態では、誤差測定は、(D1−D2)の平方二乗平均である。他の実施形態では、誤差測定は(D1−D2)の平方二乗和である。さらに他の実施形態では、誤差測定は、ベクトルD1(または、D2)のサイズによって規格化された(D1−D2)の平方二乗平均である。4番目に、誤差測定の最も低い値を有するような最終的な位置決定解を選択する。
【0036】
同様に、ノイズ測定値は、位置決定における誤差に導くことができる。1組のP信号から、Q信号の部分集合が、アルゴリズムが効率的に動作しても良いように、何らかの方法によって選択される。選択手法は、最も低い電力レベル(それはノイズオーバヘッドをより被りそうである)を有するそれらの信号を選ぶように、無作為又はより系統的な方法でQ信号を選択しても良い。それぞれの選択されたQ信号について、L個の雑音レベルを仮定する。位置決定解は、ノイズレベルのL回のQ個の組合せのそれぞれに対応する。ノイズのアンビギティーの解消のための方法は以下のステップを含む。1番目に、Q個の測距信号の1番目について、L個のノイズを範囲[A,B]の中で増分値Iで繰り返して選択する。当業者は、選択された位置決定システムに基づく、範囲[A,B]及び増分値I(そして、したがって、Lの数量)が分かるであろう。2番目に、(Q−1)測距信号の残りのそれぞれについて(Q−1)回上記のステップを繰り返して、複数のL個のノイズを生成する。3番目に、三辺測量などの既知の幾何技術に基づいてそれぞれの複数の雑音レベルについて、複数の曖昧な位置決定解を作成する。4番目に、当業者に既知の弁別器機能は、それぞれの複数の雑音レベルについて生成された複数の曖昧な位置決定解から、最終的な位置決定解を選択するのに使用される。弁別器機能は、電力ランキング、距離値、クロック時間バイアス制約条件、測距信号の受信の順序のような優良距離の1つ又は組合せを使用しても良い。1つの実施形態では、クロック時間バイアス制約条件を満たしている間、弁別器機能は、共同で電力ランキングと距離値の一貫性を最大にする。他の弁別器機能は、当業者に知られて、本発明の要旨から逸脱しないで、使用しても良い。
【0037】
例えば、マンハッタンデータセットにおけるフィックスに対するノイズ除去技法では、N、A、Bは、それぞれ2、0、および500メータに設定される。増分値Iは、{100メートル、50メートル}の組で調査される。解の間のアンビギティーの解消は、電力ランキング、範囲の一貫性、およびクロック時間バイアス値の組合せによって行われる。電力ランキングアルゴリズムは、下記のように動作する。入って来る測距信号の電力レベルを使用して、測距信号の先験的な順序を計算する。そして、ノイズ設定に対応するそれぞれの解について、測距信号の後天的な順序は、地理的な距離を使用することで計算される。先験的及び後天的な順序は、与えられた測距信号について比較される。先験的及び後天的におけるその格付けは、比較されて、一致は「1」とラベルされ、不一致は「0」を返す。電力ランキングは、それぞれの測距信号について以下の方法で重み付けをされたすべての測距信号にまたがる一致の合計として計算され、例えば、測距信号が、先験的なリスト(すなわち、最も近いと仮定される基地局について)において1番目の測距信号であるなら、重さはVzである。さもなければ、重さは0である。5回(測距信号の数−1)。重み付けは、それらが加算されて1になるように規格化されることに注意する。同様に、重み付けにおけるバイアスにより、改良された結果を与えることを示すより重く重み付けされるべく最も強い測距信号を可能とする。また、先験的及び後天的な範囲(RRMS)の二乗平均差は、各解のために計算される。範囲の一貫性は、1−RRMS/max(RRMS)として計算される。クロック時間バイアス値は、許容された解の上で、[−1000メートルから1000メートル]範囲を実施する。最終的な位置決定解は、電力ランキングと範囲の一貫性の生成を最大にしている間に、クロック時間バイアス値の制約条件を満たすものである。結果は図15に示す。改良が、最も良い代数的手法の上で観測されることに注意される。
【0038】
開示された実施形態の上記の記載により、どのような当業者も本発明を作るか、または使用することができる。これらの実施形態への様々な変更は容易に当業者に明らかになり、本発明のスピリット又は範囲から逸脱しないで、ここに定義された総称している原則は他の実施形態に適用しても良い。
【技術分野】
【0001】
本願は、2004年11月17日に出願された米国特許出願No.60/029,011に対して優先権を有する。
【0002】
開示された課題は、一般的に、位置決定に対する方法に関し、特に、ノイズの有無にかかわらない環境において、位置決定におけるアンビギティーを解決する様々なヒューリスティック技術を使用する方法に関連する。
【0003】
本発明は、位置決定におけるアンビギティーの解決方法に関する。
【背景技術】
【0004】
距離ベースの位置決定システムでは、複数のソースからの測距信号の測定は、各測距信号のソースに関連する距離情報に変換される。既知の位置を有する異なるソースへの距離は、例えば、三辺測量(別名:三角測量)として既知の幾何技術を介して、未知のユーザ位置を解明するために結合される。測距信号の遅延を確実に知ることができないのであれば(例えば、ユーザクロックがネットワークに同期しない非同期システムにおいて)、位置決定アルゴリズムは、追加測定を使用して、三辺測量プロセスによって解決すべき他の未知数としてユーザクロック時間バイアスを扱っても良い。
【0005】
しかしながら、位置決定システムは、利用者座標の1つ以上の位置決定解集合とクロック時間バイアスが1組の距離測定と一致しているかどうか曖昧である。位置決定システムは3つの異なった方法で曖昧な位置決定解を生成することができ、1番目に、アンビギティーが不十分な測定値によって引き起こされることができ、2番目に、アンビギティーが位置決定で採用されたアルゴリズムの性質によって導入されても良く、3番目に、アンビギティーがノイズ測定値の存在によって導入されても良い。
【0006】
1番目に、未知数の数が独立している測定値の数以上である時に、システムは、不十分な数の測定値を有する。例えば、未知数が二次元ユーザ空間座標とユーザクロック時間バイアスであるケースを考慮する。図1に示したケースを考慮する。3つの未知数、すなわち、移動局緯度、経度、およびクロック時間バイアスがある。3つの基地局、すなわち、BS1、BS2、BS3、と、3つの関連距離測定値とがある。円は、移動局で測定されたような移動局と基地局の間の距離と適当な解に対応する計算されたクロック時間バイアスとの合計によって与えられた半径を有する特定の基地局の中心に置かれた状態でプロットされる。3つの独立している距離測定が与えられると、それぞれの組の円の論理積で示した2つの可能な位置決定解がある。
【0007】
2番目に、ユーザを位置決めするのに使用されるアルゴリズムの本質は、アンビギティーのソースであることが可能である。アンビギティーに影響されやすい公知のアルゴリズムは、米国特許6,289,280に記載されている。このアルゴリズムは、閉形式連立方程式を使用する未知数について解いている。それはユーザ位置について代数的に解くので、このアルゴリズムは効率的に動作して、時間又はリソースの制限を有するアプリケーションと装置に適している。解は、方程式の数が未知数の数と等しい二次方程式のシステムに測定値を結合するのに線型代数操作を使用する。2つの解が、二次方程式の2つのルートに関連して生成される。2つの解が、追加の手段で解くべき必要がある曖昧な解の組を形成する。
【0008】
例えば、未知数が二次元ユーザ空間座標とユーザクロック時間バイアスであるケースを考慮する。4つの測定値で、システムは、ユーザ位置を明白に解くための十分な数の測定値を有しているといっても良い。しかし、代数的手法が使用されているときに、4つの測定値が3つの「平均した」測定値に結合され、図2に示すように、これらの平均に対応する2つの解が特定される。
【0009】
3番目に、ノイズ測定値は、ユーザ位置の決定における誤差に導くことができる。ノイズを既知の又は計算可能な統計パラメータを有する離散変数であると仮定することによって、雑音環境における位置決め決定方法を考慮する。1組の調整された測定値と対応する解は、各仮定された雑音レベルに対して生成される。そのような位置決定システムは曖昧であって、その結果、同様に、アンビギティー解決技術を保証する。例えば、図3において、基地局BS2からの測定値に関連する各100メートル離れた3つの雑音レベルを考慮する。各雑音レベルについて、1組の円は、距離測定値(BS2の場合では、この測定値は仮定された雑音レベルによって調整される)と計算されたクロック時間バイアスとの合計に対応する半径で、前述のようにプロットされる。円の論理積によって示された各雑音レベルに関連する3つの曖昧な解がある。
【0010】
3番目に、ノイズ測定値は、ユーザ位置の決定における誤差に導くことができる。ノイズを既知の又は計算可能な統計パラメータを有する離散変数であると仮定することによって、雑音環境における位置決め決定方法を考慮する。1組の調整された測定値と対応する解は、各仮定された雑音レベルに対して生成される。そのような位置決定システムは曖昧であって、その結果、同様に、アンビギティー解決技術を保証する。例えば、図3において、基地局BS2からの測定値に関連する各100メートル離れた3つの雑音レベルを考慮する。各雑音レベルについて、1組の円は、距離測定値の合計(BS2の場合では、この測定値は仮定された雑音レベルによって調整される)と計算されたクロック時間バイアスに対応する半径で、前述のようにプロットされる。円の論理積によって示された各雑音レベルに関連する3つの曖昧な解がある。
【0011】
従って、1つの可能な解がこれらの先行技術のアルゴリズムで提示すので、1組の曖昧な位置決定解から正しい(別名:最終)位置決定解を選択する方法を提供することは望ましいだろう。
【発明の概要】
【0012】
開示されているのは、1組の曖昧な位置決定解から様々なヒューリスティックス、そして/または、雑音除去を使用することで正しい(別名:最終)位置決定解を選択するための方法である。
【0013】
1つの局面によれば、クロック時間バイアス値を使用してN個の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法は、ステップを含んでおり、クロック時間バイアスに対する確率分布関数(PDF)モデルを生成し、N個の曖昧な位置決定解に対するN個のクロック時間バイアス値を取得し、それぞれのN個のクロック時間バイアス値を前記PDFモデルに挿入し、前記PDFモデルを評価して、N個のPDF値を得て、前記N個のPDF値にN個の優良距離(goodness metrics)を設定し、前記N個の優良距離を比較し、前記N個の優良距離の最大値として最大の優良距離を定義し、前記最大の優良距離を有する最終的な位置決定解を選択する。
【0014】
もう1つの局面によれば、複数の測距信号(ranging signals)の受信(別名:到着時間)順序を使用して複数の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法は、以下のステップを含み、最早から最新までの実際の到着時刻の順序(TOA)に基づいて複数の測距信号を格付けし、それぞれの複数の曖昧な位置決定解に対応する到着時間の期待順序(expected order)に基づいて複数の測距信号を格付けし、実際の到着時刻の順序(TOA)に基づき、それぞれの複数の曖昧な位置決定解に対応する到着時間の期待順序に基づいて測距信号のランキングを比較する。
【0015】
さらに他の1つの局面によれば、複数の測距信号の受信電力レベルの順序を使用して複数の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法は、以下のステップを含み、最強から最弱までの受信電力レベルの順序に基づいて複数個の測距信号を格付けし、それぞれの複数の曖昧な位置決定解に対応する受信電力レベルの期待順序に基づいて複数の測距信号を格付けし、受信電力レベルの順序に基づいて、そして、それぞれの複数の曖昧な位置決定解に対応する受信電力レベルの期待順序に基づいて測距信号のランキングを比較する。
【0016】
更に他の局面によれば、複数の曖昧な位置決定解での位置決定におけるアンビギティーを解決する方法は、以下のステップを含み、それぞれM個のソースに対するそれぞれの複数の曖昧な位置決定解に対応する複数の距離D1を導きだし、複数の元の距離D2を得て、それぞれの複数の距離D1とそれぞれのその対応する複数の元の距離D2とを比較して、複数の誤差測定を計算し、複数の誤差測定の最も低い値を有するような最終的な位置決定解を選択する。
【0017】
さらに他の局面によると、雑音環境における位置決定におけるアンビギティーを解決する方法は、以下のステップを含み、範囲[A,B]内での繰り返しで、Q個の測距信号の1番目に対して増分1で、L個の雑音を選択し、複数のL個の雑音レベルを生成するために、(Q−1)個の測距信号の残りのそれぞれについて、(Q−1)回の選択ステップを繰り返し、幾何技術(geometric technique)に基づいてそれぞれの複数のL個の雑音レベルについて複数の曖昧な位置決定解を作成し、弁別器機能に基づいて前記複数の曖昧な位置決定解から最終的な位置決定解を選択する。
【0018】
他の実施形態が、以下の詳細な記述から容易に当業者に明らかになるのが理解されるだろうし、それは実例として示され記載された様々な実施形態である。図面と詳細な記載は、当然実例としてみなされ、制限をするものとしてはみなされない。
【図面の簡単な説明】
【0019】
【図1】図1は、未知のユーザ空間座標と2つの曖昧な位置決定解を有するクロック時間バイアス値とを有する3つの測定値の例を示す図である。
【図2】図2は、2つの曖昧な位置決定解での3つの未知数を有する4つの測定値の例を示す図である。
【図3】図3は、3つの曖昧な位置決定解を有するノイズ測定値の例を示す図である。
【図4】図4は、マンハッタンデータセットに対して、クロック時間バイアス値とそれぞれの曖昧な位置決定解に対する水平誤差との関係を示す図である。
【図5】図5は、クロック時間バイアス値の制約条件を介してアンビギティーを解決することによって、2つの曖昧な位置決定解(解#1と解#2)と選択された最終的な位置決定解の統計的性能を示す図であって、マンハッタンデータセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされる。
【図6A】図6Aは、マンハッタンデータセットに対して2つの曖昧な位置決定解の解#1で生成されたクロック時間バイアスのヒストグラムを示す図である。
【図6B】図6Bは、マンハッタンデータセットに対して2つの曖昧な位置決定解の解#2で生成されたクロック時間バイアスのヒストグラムを示す図である。
【図7】図7は、キャンベルデータセットに対するそれぞれの曖昧な位置決定解に対するクロック時間バイアス値と水平誤差との関係を示す図である。
【図8】図8は、クロック時間バイアス値の制約条件を介してアンビギティーを解決することによって、2つの曖昧な位置決定解(解#1と解#2)と選択された最終的な位置決定解の統計的性能を示す図であって、キャンベルデータセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされる。
【図9】図9は、日本データセットに対するそれぞれの曖昧な位置決定解に対するクロック時間バイアス値と水平誤差との関係を示す図である。
【図10】図10は、クロック時間バイアス値の制約条件を介してアンビギティーを解決することによって、2つの曖昧な位置決定解(解#1と解#2)と選択された最終的な位置決定解の統計的性能を示す図であって、キャンベルデータセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされる。
【図11】図11は、測距信号到着の順に一貫性を介してアンビギティーを解決することによって、2つの曖昧な位置決定解(解#1と解#2)と選択された最終的な位置決定解の統計的性能を示す図であって、マンハッタンデータセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされる。
【図12】図12は、測距信号到着の順に一貫性を介してアンビギティーを解決することによって、2つの曖昧な位置決定解(解#1と解#2)と選択された最終的な位置決定解の統計的性能を示す図であって、日本データセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされる。
【図13】図13は、距離値の一貫性を介してアンビギティーを解決することによって、2つの曖昧な位置決定解(解#1と解#2)と選択された最終的な位置決定解の統計的性能を示す図であって、マンハッタンデータセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされる。
【図14】図14は、距離値の一貫性を介してアンビギティーを解決することによって、2つの曖昧な位置決定解(解#1と解#2)と選択された最終的な位置決定解の統計的性能を示す図であって、日本データセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされる。
【図15】図15は、雑音除去の有無にかかわらず最も良い曖昧な位置決定解での2つの曖昧な位置決定解(解#1と解#2)の統計的性能を示す図であって、マンハッタンデータセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされる。
【発明を実施するための形態】
【0020】
添付図面に関する以下の記載は、発明の様々な実施形態の記載として意図しており、発明を実施しても良い唯一の実施形態を表すことを意図していない。各実施形態は、単に例示又は図示として提供しており、必ずしも他の実施形態において好ましいとか又は効果的であるというように解釈するべきであるというわけではない。特定の詳細な記載は、発明の理解を提供するのに使用される。しかしながら、発明がこれらの特定の詳細な記載なしで実施されるのは当業者に明らかになる。頭字語と他の描写的である用語論は、単に便宜と明快のために使用されても良く、発明の範囲を制限することを意図しない。
【0021】
アンビギティーの解決に対する様々なヒューリスティックなアプローチにより、1つ以上の未知数又は組合せの既知の又は予想される振る舞い、様々な定量化可能なパラメータの一貫性(consistency)、そして/または、測定値又は測定の中の異なったパラメータからの冗長度を活用することを開示する。開示されたヒューリスティックなアプローチの主な利点は、余分な測定が位置決定解のアンビギティーの解消の目的に対して必要ではないということである。
【0022】
図示だけの目的のために、マンハッタン、日本、およびキャンベルから実際のユーザデータを使用するシミュレーションを示す。マンハッタンデータベースは、1ロケーションあたり約20〜100の位置フィックス(position fixes)で、都市をまたがる約25のロケーションからの1316のフィックス(fixes)から成る。日本データセットは、全日本からの約1912のフィックスから成る。キャンベルデータセットは、約2000のフィックスで静止した位置から成る。
【0023】
1つの実施形態では、アンビギティーの解決に対する方法は、いくつかの未知数とそれらの組合せの振る舞いにおける物理的制約を使用する。特に、非同期システムは、ユーザ位置(user location)のアンビギティーを除くのに利用可能なクロック時間バイアス値に関する1組の仮定又は情報の利益を得ることができる。ユーザクロックタイミングが何らかの参照タイミング信号から学習されるシステムでは、ユーザクロック時間バイアス値は、参照タイミング信号が参照タイミング信号のソースからユーザまで伝播するのに要する時間、何らかの多重伝搬送路、及び、受信処理オーバヘッド、およびクロックスルーイング誤差(clock slewing error)を含んでも良い。クロック時間バイアス値の確率分布関数(PDF)は、そのネットワークに対して導き出だされ、ユーザ位置を明確にするのに使用することができる。
【0024】
ユーザクロック時間バイアス値は、受信機設計、ユーザクロック設計特性、多重伝搬送路、等の様々な要素によって指図された分布パラメータで既知の統計分布で、そして、地上系では、基地局密度などのネットワーク展開問題で特徴付けられても良い。分布パラメータは、静的に設定しても良いし、与えられた位置確認システムに対して動的に学習しても良い。最終的な位置決定解に関する優良距離(goodness metric)は、計算されたクロック時間バイアス値の値とシナリオに対するクロック時間バイアス値の確率分布関数(PDF)とから導き出すことができる。
【0025】
N個のクロック時間バイアス値を使用して1組のN個の曖昧な位置決定解からの最終的な位置決定解を決定するために、以下のステップが必要であって、1番目に、N個のクロック時間バイアス値に対する確率分布関数(PDF)モデルを生成している。1つの実施形態では、PDFモデルはその平均と標準偏差によってパラメータ化される。2番目に、それぞれのN個の曖昧な位置決定解に対して、クロック時間バイアス値を得ると、結果としてN個のクロック時間バイアス値になる。3番目に、それぞれの曖昧な位置決定解に対して、対応するクロック時間バイアス値をPDFモデルに挿入する。4番目に、それぞれの曖昧な位置決定解に対して、挿入されたクロック時間バイアス値でのPDFモデルを評価して、PDF値を得る。その結果は、N個のクロック時間バイアス値に対するN個のPDF値であるべきである。5番目に、それぞれの曖昧な位置決定解に対して、曖昧な位置決定解に関する優良距離をPDF値に設定する。更にまた、時間バイアスが評価するN個のクロックに対応するN個のPDF値に対応するN個の優良距離があるべきである。6番目に、N個の優良距離の最大値として、N個の優良距離と定義された最大の優良距離を比較する。7番目に、最大の優良距離を有する曖昧な位置決定解から最終的な位置決定解を選択する。数量Nは1を越える整数と定義される。
【0026】
1つの実施形態では、クロック時間バイアス値は、それぞれマイナス100メートルと100メートルの平均と標準偏差を有するガウス確率分布関数(PDF)を追従するようにモデル化される。もし、計算されたクロック時間バイアス値(光の速さが掛けられる)が、マイナス200メートルであれば、優良距離は、平均から離れたガウス確率分布関数の1つの標準偏差の値へ設定することができる。当業者は、ガウス形PDF(例えば、統計パラメータの有限集合)以外の他のPDFを使用しても良いのが分かるだろう。
【0027】
一例では、クロック時間バイアス値は、ある値Aと他の値Bとの間で許されるクロック時間バイアス値で、静的で、簡単な一様分布を有するものと仮定する。マンハッタンとキャンベルデータセットにおいて、AとBはマイナス1000メートルと1000メートルにそれぞれ設定される。日本の場合では、経験的に観測されるように日本データセットにより良く合うように、AとBはマイナス2000メートルと100メートルに設定される。マンハッタンデータセットに関して、クロック時間バイアス値と、それぞれの曖昧な位置決定解の水平誤差との関係を、図4に示す。大きい誤差については、クロック時間バイアス値上では、一般的に、強い誤差の直線的な依存があるのが観測される。マンハッタンデータセットについては、性能結果を図5に示す。最終的な位置決定解が、全体のデータセットにまたがる2つの曖昧な位置決定解のどちらかより統計的に優れているので、アンビギティーの解消アルゴリズムがうまくいくのが観測される。「解2」とラベルされた曖昧な位置決定解は、一般的に、「解1」とラベルされた曖昧な位置決定解より優れている。そのような矛盾は、図6Aと図6Bに示すように、それぞれの曖昧な位置決定解によって生成されるようなクロック時間バイアス値の振る舞いによって、明らかであり、説明可能である。1番目の曖昧な位置決定解が非常に変化する結果を生成した一方で、2番目の曖昧な位置決定解が「きつい」分布をどのように有しているかが分かる。
【0028】
図7はキャンベルデータセットに対するそれぞれの曖昧な位置決定解に対するクロック時間バイアス値、水平誤差との関係を示す図である。図8は、2つの曖昧な位置決定解(解#1と解#2)とキャンベルデータセットに対するメートルでの水平誤差の累積分布関数(CDF)としてプロットされた、選択された最終的な位置決定解の統計的性能を示す図である。日本データセットについては、図9はそれぞれの曖昧な位置決定解に対するクロック時間バイアス値、水平誤差との関係を示す図である。一方、図10は、2つの曖昧な位置決定解(解#1と解#2)とメートルでの水平誤差の累積分布関数(CDF)としてプロットされた、選択された最終的な位置決定解の統計的性能を示す図である。
【0029】
アンビギティーの解決に対する代替方法は、測距信号順序の一貫性を使用する。測距信号の到着時間(TOA)、そして/または、測距信号の電力レベルのような測距信号順序を得るための様々な方法がある。
【0030】
1つの実施形態では、アンビギティーの解決に対する方法は、アンビギティーを除去するのに複数のソースからの測距信号の受信(別名:到着時間)の順序を使用する。各解に対応する期待順序は、測距信号が受信されている実際の順序で得られて、比較される。選択された最終的な位置決定解は、順序付けに最も一致するもの、または順序付けに最も一致する複数の曖昧な位置決定解の組合せである。
【0031】
測距信号の受信の順序(別名:到着時間)を使用する1組の曖昧な位置決定解からの最終的な位置決定解を決定するために、以下のステップが必要である。1番目に、最早から最新までの実際の到着時刻の順序(TOA)に基づいて測距信号を格付けする。2番目に、それぞれの曖昧な位置決定解に対して、それぞれの曖昧な位置決定解に対応する到着時間の期待順序に基づいて測距信号を格付けする。3番目に、最早から最新までの実際の到着時刻の順序(TOA)における測距信号のランキングと、それぞれの曖昧な位置決定解に対応する到着の期待順序に基づく測距信号のランキングとを比較する。4番目に、順序付けに最も一致するもの、または順序付けに最も一致する複数の曖昧な位置決定解の組合せとして最終的な位置決定解を選択する。
【0032】
一例では、後天的な測距信号順序は、到達時間(TOA)の情報から得られた先験的な測距信号順序と比較される。それぞれの測距信号に関しては、先験的及び後天的なリストの中のランキングは、比較されて、一致の場合には「1」、不一致の場合には「0」とラベルされる。すべての測距信号にわたって最も一致(すなわち、最大で「1」)する解は、位置決定解として選ばれる。タイ(tie)の場合には、平均が使用される。マンハッタンデータセットに適用されたこのアンビギティーの解決技術に対する結果は、図11に示されており、日本データセットについては、図12に示されている。一般的に、最終的な位置決定解は、同様であるか、または2つの曖昧な位置決定解のどちらかより統計的に優れている。
【0033】
他の実施形態では、アンビギティーの解決に対する方法は、曖昧な位置決定解の間で区別するのに、測距信号の受信電力レベルを使用する。1つは、位置決定解の間で区別するのに受信電力レベルを使用しても良い。測距信号の受信電力レベルを使用する1組の曖昧な位置決定解からの最終的な位置決定解を決定するために、以下のステップが必要である。1番目に、最強から最弱まで、受信された受信電力レベルの順序に基づいて測距信号を格付けする。2番目に、それぞれの曖昧な位置決定解に対して、それぞれの曖昧な位置決定解に対応する受信電力レベルの期待順序に基づいて測距信号を格付けする。受信電力レベルの期待順序は、それぞれの曖昧な位置決定解に対応する到着時間の期待順序と同じであると仮定する。3番目に、最強から最弱まで受信された受信電力レベルの順序における測距信号のランキングとそれぞれの曖昧な位置決定解に対応する受信電力レベルの期待順序に基づく測距信号のランキングとを比較する。4番目に、順序付けに最も一致するもの、または順序付けに最も一致する複数の曖昧な位置決定解の組合せとして最終的な位置決定解を選択する。
【0034】
他の実施形態では、アンビギティーの解決に対する方法は、アンビギティーを取り除くのにM個のソースとその組合せに距離の数値を使用する。それぞれの曖昧な位置決定解に対応するそれぞれのM個のソースにそれぞれの距離D1を導き出して、クロック時間バイアス値(元の距離D2としてラベルされる)によって調整された元の距離とそれらを比較できる。ソースの数量はMで定義され、Mは1より大きい整数である。((D1−D2)の平方二乗平均又は(D1−D2)の平方平均によって定義されるように)最も近い一致する曖昧な位置決定解、または最も近い一致する複数の値の何らかの組合せが最終的な位置決定解として選ばれている。本発明が、(D1−D2)の平方二乗平均又は二乗平均に限定されないか、限定はされないが平方二乗和(RSS)又は二乗和(SS)のような他の誤差測定を本発明の要旨を変更せずに使用してもよいことは、当業者にとって明らかであることが分かるであろう。マンハッタンと日本データセットに対する結果を図13と図14にそれぞれ示す。どちらの場合も、最終的な位置決定解は、全体のデータセットにまたがる2つの曖昧な位置決定解のどちらかより統計的に優れている。
【0035】
距離の数値を使用する1組の曖昧な位置決定解からM個のソースまで最終的な位置決定解を決定するために、以下のステップが必要である。1番目に、それぞれのM個のソースに対して、それぞれの曖昧な位置決定解に対応する距離D1を引き出す。2番目に、(クロック時間バイアス値で調整された元の距離)元の距離D2を得る。3番目に、元の距離D2と距離D1を比較し、これらの誤差測定を計算する。1つの実施形態では、誤差測定は、(D1−D2)の平方二乗平均である。他の実施形態では、誤差測定は(D1−D2)の平方二乗和である。さらに他の実施形態では、誤差測定は、ベクトルD1(または、D2)のサイズによって規格化された(D1−D2)の平方二乗平均である。4番目に、誤差測定の最も低い値を有するような最終的な位置決定解を選択する。
【0036】
同様に、ノイズ測定値は、位置決定における誤差に導くことができる。1組のP信号から、Q信号の部分集合が、アルゴリズムが効率的に動作しても良いように、何らかの方法によって選択される。選択手法は、最も低い電力レベル(それはノイズオーバヘッドをより被りそうである)を有するそれらの信号を選ぶように、無作為又はより系統的な方法でQ信号を選択しても良い。それぞれの選択されたQ信号について、L個の雑音レベルを仮定する。位置決定解は、ノイズレベルのL回のQ個の組合せのそれぞれに対応する。ノイズのアンビギティーの解消のための方法は以下のステップを含む。1番目に、Q個の測距信号の1番目について、L個のノイズを範囲[A,B]の中で増分値Iで繰り返して選択する。当業者は、選択された位置決定システムに基づく、範囲[A,B]及び増分値I(そして、したがって、Lの数量)が分かるであろう。2番目に、(Q−1)測距信号の残りのそれぞれについて(Q−1)回上記のステップを繰り返して、複数のL個のノイズを生成する。3番目に、三辺測量などの既知の幾何技術に基づいてそれぞれの複数の雑音レベルについて、複数の曖昧な位置決定解を作成する。4番目に、当業者に既知の弁別器機能は、それぞれの複数の雑音レベルについて生成された複数の曖昧な位置決定解から、最終的な位置決定解を選択するのに使用される。弁別器機能は、電力ランキング、距離値、クロック時間バイアス制約条件、測距信号の受信の順序のような優良距離の1つ又は組合せを使用しても良い。1つの実施形態では、クロック時間バイアス制約条件を満たしている間、弁別器機能は、共同で電力ランキングと距離値の一貫性を最大にする。他の弁別器機能は、当業者に知られて、本発明の要旨から逸脱しないで、使用しても良い。
【0037】
例えば、マンハッタンデータセットにおけるフィックスに対するノイズ除去技法では、N、A、Bは、それぞれ2、0、および500メータに設定される。増分値Iは、{100メートル、50メートル}の組で調査される。解の間のアンビギティーの解消は、電力ランキング、範囲の一貫性、およびクロック時間バイアス値の組合せによって行われる。電力ランキングアルゴリズムは、下記のように動作する。入って来る測距信号の電力レベルを使用して、測距信号の先験的な順序を計算する。そして、ノイズ設定に対応するそれぞれの解について、測距信号の後天的な順序は、地理的な距離を使用することで計算される。先験的及び後天的な順序は、与えられた測距信号について比較される。先験的及び後天的におけるその格付けは、比較されて、一致は「1」とラベルされ、不一致は「0」を返す。電力ランキングは、それぞれの測距信号について以下の方法で重み付けをされたすべての測距信号にまたがる一致の合計として計算され、例えば、測距信号が、先験的なリスト(すなわち、最も近いと仮定される基地局について)において1番目の測距信号であるなら、重さはVzである。さもなければ、重さは0である。5回(測距信号の数−1)。重み付けは、それらが加算されて1になるように規格化されることに注意する。同様に、重み付けにおけるバイアスにより、改良された結果を与えることを示すより重く重み付けされるべく最も強い測距信号を可能とする。また、先験的及び後天的な範囲(RRMS)の二乗平均差は、各解のために計算される。範囲の一貫性は、1−RRMS/max(RRMS)として計算される。クロック時間バイアス値は、許容された解の上で、[−1000メートルから1000メートル]範囲を実施する。最終的な位置決定解は、電力ランキングと範囲の一貫性の生成を最大にしている間に、クロック時間バイアス値の制約条件を満たすものである。結果は図15に示す。改良が、最も良い代数的手法の上で観測されることに注意される。
【0038】
開示された実施形態の上記の記載により、どのような当業者も本発明を作るか、または使用することができる。これらの実施形態への様々な変更は容易に当業者に明らかになり、本発明のスピリット又は範囲から逸脱しないで、ここに定義された総称している原則は他の実施形態に適用しても良い。
【特許請求の範囲】
【請求項1】
クロック時間バイアス値(clock temporal bias value)を使用してN個の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法は、
クロック時間バイアスに対する確率分布関数(PDF)モデルを生成し、
N個の曖昧な位置決定解に対するN個のクロック時間バイアス値を取得し、
それぞれのN個のクロック時間バイアス値を前記PDFモデルに挿入し、
前記PDFモデルを評価して、N個のPDF値を得て、
前記N個のPDF値にN個の優良距離(goodness metrics)を設定し、
前記N個の優良距離を比較し、
前記N個の優良距離の最大値として最大の優良距離を定義し、
前記最大の優良距離を有する最終的な位置決定解を選択することを具備する。
【請求項2】
請求項1の方法において、PDFモデルは、その平均と標準偏差によってパラメータ化される。
【請求項3】
請求項1の方法において、PDFモデルは、統計パラメータの有限集合によってパラメータ化される。
【請求項4】
請求項1の方法において、Nは2と等しい。
【請求項5】
複数の測距信号(ranging signals)の受信(別名:到着時間)順序を使用して複数の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法は、
最早から最新までの実際の到着時刻の順序(TOA)に基づいて複数の測距信号を格付けし、
それぞれの複数の曖昧な位置決定解に対応する到着時間の期待順序(expected order)に基づいて複数の測距信号を格付けし、
実際の到着時刻の順序(TOA)に基づき、それぞれの複数の曖昧な位置決定解に対応する到着時間の期待順序に基づいて測距信号のランキングを比較することを具備する。
【請求項6】
請求項5の方法において、順序付けに最も一致するような最終的な位置決定解を選択するステップを更に具備する。
【請求項7】
請求項5の方法において、順序付けに最も一致する複数個の曖昧な位置決定解の組合せを有するような最終的な位置決定解を選択するステップを更に具備する。
【請求項8】
複数の測距信号の受信電力レベルの順序を使用して複数の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法は、
最強から最弱までの受信電力レベルの順序に基づいて複数個の測距信号を格付けし、
それぞれの複数の曖昧な位置決定解に対応する受信電力レベルの期待順序に基づいて複数の測距信号を格付けし、
受信電力レベルの順序に基づいて、そして、それぞれの複数の曖昧な位置決定解に対応する受信電力レベルの期待順序に基づいて測距信号のランキングを比較することを具備する。
【請求項9】
請求項8の方法において、順序付けに最も一致するような最終的な位置決定解を選択するステップを更に具備する。
【請求項10】
請求項8の方法において、順序付けに最も一致する複数の曖昧な位置決定解の組合せを有するような最終的な位置決定解を選択するステップを更に具備する。
【請求項11】
複数の曖昧な位置決定解での位置決定におけるアンビギティーを解決する方法は、
それぞれM個のソースに対するそれぞれの複数の曖昧な位置決定解に対応する複数の距離D1を導きだし、
複数の元の距離D2を得て、
それぞれの複数の距離D1とそれぞれのその対応する複数の元の距離D2とを比較して、複数の誤差測定を計算し、
複数の誤差測定の最も低い値を有するような最終的な位置決定解を選択することを具備する。
【請求項12】
請求項11の方法において、複数の誤差測定は、距離D1から元の距離D2を引いた値の平方二乗平均である。
【請求項13】
請求項11の方法において、複数の誤差測定は、距離D1から元の距離D2を引いた値の平方二乗和である。
【請求項14】
請求項11の方法において、複数の誤差測定は、ベクトルD1のサイズで規格化された距離D1から元の距離D2を引いた値の平方二乗平均である。
【請求項15】
請求項11の方法において、複数の誤差測定は、ベクトルD2のサイズで規格化された距離D1から元の距離D2を引いた値の平方二乗平均である。
【請求項16】
雑音環境における位置決定におけるアンビギティーを解決する方法は、
範囲[A,B]内での繰り返しで、Q個の測距信号の1番目に対して増分1で、L個の雑音を選択し、
複数のL個の雑音レベルを生成するために、(Q−1)個の測距信号の残りのそれぞれについて、(Q−1)回の選択ステップを繰り返し、
幾何技術(geometric technique)に基づいてそれぞれの複数のL個の雑音レベルについて複数の曖昧な位置決定解を作成し、
弁別器機能に基づいて前記複数の曖昧な位置決定解から最終的な位置決定解を選択することを具備する。
【請求項17】
請求項16の方法において、Qは2と等しい。
【請求項18】
請求項16の方法において、前記幾何技術は三辺測量である。
【請求項19】
請求項16の方法において、前記弁別器機能は、電力ランキング、距離値、クロック時間バイアス制約条件、及び測距信号の受信順序等の優良距離の組合せを使用する。
【請求項20】
請求項16の方法において、前記弁別器機能は、電力ランキング、距離値、クロック時間バイアス制約条件、測距信号の受信の順序から選択された前記優良距離の少なくとも2つの組合せを使用する。
【請求項21】
請求項16の方法において、前記弁別器機能は、電力ランキング、距離値、クロック時間バイアス制約条件、測距信号の受信の順序から選択された1つの優良距離を使用する。
【請求項22】
クロック時間バイアス値を使用するN個の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法を実行するための計算機プログラムで実行可能なプログラムを具体化するコンピュータ読取り可能媒体において、前記方法は、
クロック時間バイアスに対する確率分布関数(PDF)モデルを生成し、
前記N個の曖昧な位置決定解に対するN個のクロック時間バイアス値を取得し、
それぞれの前記N個のクロック時間バイアス値を前記PDFモデルに挿入し、
N個のPDF値を得るために前記PDFモデルを評価し、
前記N個のPDF値にN個の優良距離を設定し、
前記N個の優良距離を比較し、
前記N個の優良距離の最大値として最大の優良距離を定義し、
前記最大の優良距離を有する最終的な位置決定解を選択することを具備する。
【請求項23】
計算機プログラムで実行可能な命令のプログラムを具体化して、複数の測距信号の受信(別名:到着時間)の順序を使用して複数の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法を実行するコンピュータ読取り可能媒体において、前記方法は、
最早から最新までの実際の到着時刻の順序(TOA)に基づいて複数の測距信号を格付けし、
それぞれの複数の曖昧な位置決定解に対応する到着時間の期待順序に基づいて複数の測距信号を格付けし、
実際の到着時刻の順序(TOA)に基づき、それぞれの複数の曖昧な位置決定解に対応する到着時間の期待順序に基づいて測距信号のランキングを比較することを具備する。
【請求項24】
計算機プログラムで実行可能な命令のプログラムを具体化して、複数の測距信号の受信パワーレベルの順序を使用して複数の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法を実行するコンピュータ読取り可能媒体において、前記方法は、
最強から最弱までの受信電力レベルの順序に基づいて複数個の測距信号を格付けし、
それぞれの複数の曖昧な位置決定解に対応する受信電力レベルの期待順序に基づいて複数の測距信号を格付けし、
受信電力レベルの順序に基づいて、そして、それぞれの複数の曖昧な位置決定解に対応する受信電力レベルの期待順序に基づいて測距信号のランキングを比較することを具備する。
【請求項25】
計算機プログラムで実行可能な命令のプログラムを具体化して、複数の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法を実行するコンピュータ読取り可能媒体において、前記方法は、
それぞれM個のソースに対するそれぞれの複数の曖昧な位置決定解に対応する複数の距離D1を導きだし、
複数の元の距離D2を得て、
それぞれの複数の距離D1とそれぞれのその対応する複数の元の距離D2とを比較して、複数の誤差測定を計算し、
複数の誤差測定の最も低い値を有するような最終的な位置決定解を選択することを具備する。
【請求項26】
計算機プログラムで実行可能な命令のプログラムを具体化して、雑音環境における位置決定におけるアンビギティーを解決する方法を実行するコンピュータ読取り可能媒体において、前記方法は、
範囲[A,B]内での繰り返しで、Q個の測距の1番目に対して増分1で、L個の雑音を選択し、
複数のL個の雑音レベルを生成するために、Q−1測距信号の残りのそれぞれについて、Q−1回の選択ステップを繰り返し、
幾何技術に基づいてそれぞれの複数のL個の雑音レベルについて複数の曖昧な位置決定解を作成し、
弁別器機能に基づいて複数の曖昧な位置決定解から最終的な位置決定解を選択することを具備する。
【請求項1】
クロック時間バイアス値(clock temporal bias value)を使用してN個の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法は、
クロック時間バイアスに対する確率分布関数(PDF)モデルを生成し、
N個の曖昧な位置決定解に対するN個のクロック時間バイアス値を取得し、
それぞれのN個のクロック時間バイアス値を前記PDFモデルに挿入し、
前記PDFモデルを評価して、N個のPDF値を得て、
前記N個のPDF値にN個の優良距離(goodness metrics)を設定し、
前記N個の優良距離を比較し、
前記N個の優良距離の最大値として最大の優良距離を定義し、
前記最大の優良距離を有する最終的な位置決定解を選択することを具備する。
【請求項2】
請求項1の方法において、PDFモデルは、その平均と標準偏差によってパラメータ化される。
【請求項3】
請求項1の方法において、PDFモデルは、統計パラメータの有限集合によってパラメータ化される。
【請求項4】
請求項1の方法において、Nは2と等しい。
【請求項5】
複数の測距信号(ranging signals)の受信(別名:到着時間)順序を使用して複数の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法は、
最早から最新までの実際の到着時刻の順序(TOA)に基づいて複数の測距信号を格付けし、
それぞれの複数の曖昧な位置決定解に対応する到着時間の期待順序(expected order)に基づいて複数の測距信号を格付けし、
実際の到着時刻の順序(TOA)に基づき、それぞれの複数の曖昧な位置決定解に対応する到着時間の期待順序に基づいて測距信号のランキングを比較することを具備する。
【請求項6】
請求項5の方法において、順序付けに最も一致するような最終的な位置決定解を選択するステップを更に具備する。
【請求項7】
請求項5の方法において、順序付けに最も一致する複数個の曖昧な位置決定解の組合せを有するような最終的な位置決定解を選択するステップを更に具備する。
【請求項8】
複数の測距信号の受信電力レベルの順序を使用して複数の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法は、
最強から最弱までの受信電力レベルの順序に基づいて複数個の測距信号を格付けし、
それぞれの複数の曖昧な位置決定解に対応する受信電力レベルの期待順序に基づいて複数の測距信号を格付けし、
受信電力レベルの順序に基づいて、そして、それぞれの複数の曖昧な位置決定解に対応する受信電力レベルの期待順序に基づいて測距信号のランキングを比較することを具備する。
【請求項9】
請求項8の方法において、順序付けに最も一致するような最終的な位置決定解を選択するステップを更に具備する。
【請求項10】
請求項8の方法において、順序付けに最も一致する複数の曖昧な位置決定解の組合せを有するような最終的な位置決定解を選択するステップを更に具備する。
【請求項11】
複数の曖昧な位置決定解での位置決定におけるアンビギティーを解決する方法は、
それぞれM個のソースに対するそれぞれの複数の曖昧な位置決定解に対応する複数の距離D1を導きだし、
複数の元の距離D2を得て、
それぞれの複数の距離D1とそれぞれのその対応する複数の元の距離D2とを比較して、複数の誤差測定を計算し、
複数の誤差測定の最も低い値を有するような最終的な位置決定解を選択することを具備する。
【請求項12】
請求項11の方法において、複数の誤差測定は、距離D1から元の距離D2を引いた値の平方二乗平均である。
【請求項13】
請求項11の方法において、複数の誤差測定は、距離D1から元の距離D2を引いた値の平方二乗和である。
【請求項14】
請求項11の方法において、複数の誤差測定は、ベクトルD1のサイズで規格化された距離D1から元の距離D2を引いた値の平方二乗平均である。
【請求項15】
請求項11の方法において、複数の誤差測定は、ベクトルD2のサイズで規格化された距離D1から元の距離D2を引いた値の平方二乗平均である。
【請求項16】
雑音環境における位置決定におけるアンビギティーを解決する方法は、
範囲[A,B]内での繰り返しで、Q個の測距信号の1番目に対して増分1で、L個の雑音を選択し、
複数のL個の雑音レベルを生成するために、(Q−1)個の測距信号の残りのそれぞれについて、(Q−1)回の選択ステップを繰り返し、
幾何技術(geometric technique)に基づいてそれぞれの複数のL個の雑音レベルについて複数の曖昧な位置決定解を作成し、
弁別器機能に基づいて前記複数の曖昧な位置決定解から最終的な位置決定解を選択することを具備する。
【請求項17】
請求項16の方法において、Qは2と等しい。
【請求項18】
請求項16の方法において、前記幾何技術は三辺測量である。
【請求項19】
請求項16の方法において、前記弁別器機能は、電力ランキング、距離値、クロック時間バイアス制約条件、及び測距信号の受信順序等の優良距離の組合せを使用する。
【請求項20】
請求項16の方法において、前記弁別器機能は、電力ランキング、距離値、クロック時間バイアス制約条件、測距信号の受信の順序から選択された前記優良距離の少なくとも2つの組合せを使用する。
【請求項21】
請求項16の方法において、前記弁別器機能は、電力ランキング、距離値、クロック時間バイアス制約条件、測距信号の受信の順序から選択された1つの優良距離を使用する。
【請求項22】
クロック時間バイアス値を使用するN個の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法を実行するための計算機プログラムで実行可能なプログラムを具体化するコンピュータ読取り可能媒体において、前記方法は、
クロック時間バイアスに対する確率分布関数(PDF)モデルを生成し、
前記N個の曖昧な位置決定解に対するN個のクロック時間バイアス値を取得し、
それぞれの前記N個のクロック時間バイアス値を前記PDFモデルに挿入し、
N個のPDF値を得るために前記PDFモデルを評価し、
前記N個のPDF値にN個の優良距離を設定し、
前記N個の優良距離を比較し、
前記N個の優良距離の最大値として最大の優良距離を定義し、
前記最大の優良距離を有する最終的な位置決定解を選択することを具備する。
【請求項23】
計算機プログラムで実行可能な命令のプログラムを具体化して、複数の測距信号の受信(別名:到着時間)の順序を使用して複数の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法を実行するコンピュータ読取り可能媒体において、前記方法は、
最早から最新までの実際の到着時刻の順序(TOA)に基づいて複数の測距信号を格付けし、
それぞれの複数の曖昧な位置決定解に対応する到着時間の期待順序に基づいて複数の測距信号を格付けし、
実際の到着時刻の順序(TOA)に基づき、それぞれの複数の曖昧な位置決定解に対応する到着時間の期待順序に基づいて測距信号のランキングを比較することを具備する。
【請求項24】
計算機プログラムで実行可能な命令のプログラムを具体化して、複数の測距信号の受信パワーレベルの順序を使用して複数の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法を実行するコンピュータ読取り可能媒体において、前記方法は、
最強から最弱までの受信電力レベルの順序に基づいて複数個の測距信号を格付けし、
それぞれの複数の曖昧な位置決定解に対応する受信電力レベルの期待順序に基づいて複数の測距信号を格付けし、
受信電力レベルの順序に基づいて、そして、それぞれの複数の曖昧な位置決定解に対応する受信電力レベルの期待順序に基づいて測距信号のランキングを比較することを具備する。
【請求項25】
計算機プログラムで実行可能な命令のプログラムを具体化して、複数の曖昧な位置決定解を有する位置決定におけるアンビギティーを解決する方法を実行するコンピュータ読取り可能媒体において、前記方法は、
それぞれM個のソースに対するそれぞれの複数の曖昧な位置決定解に対応する複数の距離D1を導きだし、
複数の元の距離D2を得て、
それぞれの複数の距離D1とそれぞれのその対応する複数の元の距離D2とを比較して、複数の誤差測定を計算し、
複数の誤差測定の最も低い値を有するような最終的な位置決定解を選択することを具備する。
【請求項26】
計算機プログラムで実行可能な命令のプログラムを具体化して、雑音環境における位置決定におけるアンビギティーを解決する方法を実行するコンピュータ読取り可能媒体において、前記方法は、
範囲[A,B]内での繰り返しで、Q個の測距の1番目に対して増分1で、L個の雑音を選択し、
複数のL個の雑音レベルを生成するために、Q−1測距信号の残りのそれぞれについて、Q−1回の選択ステップを繰り返し、
幾何技術に基づいてそれぞれの複数のL個の雑音レベルについて複数の曖昧な位置決定解を作成し、
弁別器機能に基づいて複数の曖昧な位置決定解から最終的な位置決定解を選択することを具備する。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6A】
【図6B】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2011−107158(P2011−107158A)
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−21813(P2011−21813)
【出願日】平成23年2月3日(2011.2.3)
【分割の表示】特願2007−543275(P2007−543275)の分割
【原出願日】平成17年11月17日(2005.11.17)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願番号】特願2011−21813(P2011−21813)
【出願日】平成23年2月3日(2011.2.3)
【分割の表示】特願2007−543275(P2007−543275)の分割
【原出願日】平成17年11月17日(2005.11.17)
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
[ Back to top ]