
位置決定データを処理する方法
マップに含まれる領域内のナビゲーションできる経路の区域を表すナビゲーションできる、夫々関連付けられた速度データを持つ、複数の区域を含むマップデータを位置決定データから生成する方法であり、(i)1つ以上のナビゲーション装置を用いて位置決定データを生成する工程と、(ii)位置決定データを処理して、位置決定データから速度データを生成する工程と、(iii)ナビゲーション装置による使用に適切なマップデータの生成が起こった、ナビゲーションできる区域に速度データを関連付けるために、マップデータを速度データでアップデートする工程と、を含み、生成された速度データは、速度データを生成する位置決定データが発生したナビゲーションできる区域と関連付けられている、ことを特徴とする方法。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置に用いられるマップデータ、特に携帯ナビゲーション装置(Portable Navigation Device,PND)に用いられるマップデータ、を生成するために位置決定データを処理する方法に関するものである。本発明は、該方法を提供するための、関連する装置も提供する。
【背景技術】
【0002】
トムトムインタナショナルBVのGO(登録商標)のようなGPS技術に基づく電子ナビゲーション装置のためのマップデータは、テレアトラスNV(Tele Atlas NV)のような専門的なマップ販売社から来ている。このような装置はPNDとも呼ばれている。マップデータは経路案内のアルゴリズムによって使用されるように特別にデザインされており、一般的にGPSシステムからの位置決定データを使用する。例えば、道路は線、即ちベクトル(例:道路の始点、終点、及び方向。道路の全長は、夫々始点/終点方向のパラメータで独特に定められた、数百の区域で構成される)で表現することができる。したがって、マップはそのような複数の道路ベクトル、夫々のベクトルに関連付けられたデータ(制限速度、移動方向など)、関心のある場所 (Point of Interest, POI)、道路名、並びに公園の境界、川の境界など、全てベクトルで定義された地理的特徴のセットである。マップに含まれる全ての内容(例:道路ベクトル、POIなど)は、GPSの座標系と一致または関連する座標系を用いて定義されており、GPSで決定された装置の位置を、マップに表示される道路に正しく位置付けることを可能にし、目的地までの最適な経路を計画することを可能にする。
【0003】
テレアトラスはこのマップデータベースを作る作業を、イギリスのオーディナンス・サーベイなどの様々な情報源から得られる基本道路情報から始める。また、データの更新及び確認のための、多数の車両と他のマップ及び航空写真を調べる職員を持っている。このデータはテレアトラスのマップデータベースの中核 となる。このマップデータベースは地理的に関連付けられたデータを用いて継続的に改善されている。そして、データベースはその内容が確認され、トムトムのようなデバイス製造会社に年に4回公開される。
【0004】
夫々の道路区域は、速度データが関連付けられており、該速度に関するパラメータは、その区域においてどのような速度で移動できるかに関する目安を表し、例えばテレアトラスのようなマップデータを生成したものの平均速度である。速度データは、マップ処理を行うPNDの経路計画アルゴリズムによって利用される。したがって、このような経路計画の精度は速度他の精度に依存する。例えば、現在の装置の位置から目的地まで最も速い経路をPNDに生成させるという選択肢を、ユーザはよくPND上に提示される。速度データが正確でなければ、PNDによって計算された経路は最も速い経路でなくなり得る。
【発明の概要】
【発明が解決しようとする課題】
【0005】
道路区域の速度プロファイルは交通の密度などのパラメータによって影響されやすいため、そのような速度プロファイルにおけるばらつきは、2つの地点の間に存在する最も速い経路は継続的に同じ経路ではないことを意味する。道路区域の速度パラメータにおける誤りは、不正確な到着予定時刻(Estimated Time of Arrival, ETA)及び最も速くはない経路の 選択につながり得る。
【課題を解決するための手段】
【0006】
本発明の第1の実施形態によるとマップに含まれる領域内のナビゲーションできる経路の区域を表すナビゲーションできる、夫々関連付けられた速度データを持つ、複数の区域を含むマップデータを位置決定データから生成する方法であり、1つ以上のナビゲーション装置を用いて位置決定データを生成する工程と、前記位置決定データを処理して、前記位置決定データから速度データを生成する工程と、ナビゲーション装置による使用に適切なマップデータの生成が発生された、ナビゲーションできる区域に前記速度データを関連付けれられるために、前記マップデータを前記速度データでアップデートする工程と、
を含み、前記生成された速度データは、前記位置決定データによって前記速度データが生成された、ナビゲーションできる区域と関連付けられている、ことを特徴とする方法が提供される。
【0007】
そのような方法は、ナビゲーション装置が使用される時に得られた実際のデータを用いて速度データを生成するため、有利であると考えられる。したがって、このように得られた速度データは、速度データを生成する他の方法より正確であり得る。したがって、生成されたマップデータを用いるナビゲーション装置は、従来技術に比べ、より正確な経路を生成し得る。
【0008】
ナビゲーションできる区域は一般的に道路の区域を表すが、乗り物や人などによってナビゲーションできる他の通路、チャンネルなどの区域も表し得る。例えば、道、川、運河、サイクリングロード、運河、鉄道線路などの区域であり得る。したがって、交通は道路区域を移動する乗り物を意味することに限られるものではなく、ナビゲーションできる区域に沿った任意の動きに関連し得る。
【0009】
たとえば、交通はサイクリングロードを移動する自転車を意味し得る。
【0010】
ある実施形態では、該方法は1つ以上のナビゲーション装置の各々から位置決定データをサーバにアップロードする工程を含み、前記サーバは前記速度データを生成するために前記位置決定データを処理するように構成されている。そのような方法は、マップデータの集中生成を可能とする。
【0011】
しかし、他の代わりの実施形態又は追加的な実施形態では、該ナビゲーション装置は位置決定データを処理するように構成され得る。そのような実施形態は、該速度データをサーバにアップロードし得る。
【0012】
該方法は、複数の位置決定装置を用いて位置決定データを生成することを含み得、そのようにすることで位置決定データから得られた速度データの精度を上げる。
【0013】
該方法は、位置決定データ及び/又は速度データを、データが得られた後分析するために、サーバ及び/又はナビゲーション装置によって保存するようにさせ得る。そのような方法は、データの蓄積及びその後の処理を可能とするため、各ナビゲーションできる装置の速度データの精度を改善させ得る。したがって、ある特定の実施形態では、該方法は、1つ以上のナビゲーション装置の各々から位置決定データを、後の処理のために位置決定データを保存するサーバへ時々アップロードするようにさせる。
【0014】
該方法は、位置決定データを複数の軌跡に分ける工程を含み得、各軌跡は所定の期間にわたってナビゲーション装置から受信した位置決定データを表すものである。ある実施形態では、この所定の期間はおおよそ24時間であり得、この機関は暦日に対応し得る。
【0015】
位置決定データ(これは特に各軌跡を意味し得る)は、ナビゲーション装置の各移動を表す移動データを生成するために処理され得る。1つの移動は、ナビゲーション装置が所定の時間以上停止せずに動き続けた期間として思うことができる。位置決定データを移動データに分けることは、ナビゲーション装置が停止していた期間を排除することができるため、速度データの精度を上げることができ、有利であり得る。
【0016】
位置決定データは、不正確な位置を排除するために処理され得る。便利に、位置決定データは制度データを含み得る。不正確な位置は、位置決定データの処理に従って排除され得る。
【0017】
位置決定データは、そのデータ内の位置をナビゲーションできる区域に関連付けるために処理され得る。続いて、速度データは位置決定データお呼びその位置に関連付けられたナビゲーションできる区域から決定され得る。
【0018】
生成された速度データは複数の所定の期間のうち、ナビゲーションできる区域と関連付けられた1つに分類され得る。
【0019】
続いて、該方法は、各ナビゲーションできる区域の所定の期間の各々において速度を平均し得る。したがって、該方法は、測定された速度プロファイルを生成し得、各所定の期間は、測定された速度プロファイルにおいて1つの位置を提供し得る。これは、十分な位置決定データが存在する複数のナビゲーションできる区域(一般的には、各ナビゲーションできる区域)のために繰り返され得る。したがって、不十分なデータ、又は低質のデータは、測定された速度プロファイルが生成されていないことがあり得る。
【0020】
他の実施形態では、処理は他の期間を含む、測定された速度プロファイルを生成することを目的とし得る(即ち、第1の期間より長くあり得る第2の期間)。例えば、ある実施形態では、処理は平日に測定された速度プロファイル及び/又は週末に測定された速度プロファイルを生成することを目的とし得る。他の実施形態では、1つの測定された速度プロファイルを週全体のおいて用い得る。速度プロファイルの期間をより細かくすることで(例えば、1日)、実際の交通の流れに近い速度プロファイルが得られることは当業者には明らかであろう。しかし、期間を細かくすると、測定された速度プロファイルを生成するために必要なデータ量も増加することも明らかであろう。
【0021】
一般的に、1つ以上の位置決定装置の各々によって得られた位置決定データは、各位置が発生した時刻データも含む。他の実施形態では、位置決定装置は所定の時刻に位置決定データを取得し得、したがって、各位置が発生した時刻を記録しない。一般的に、時刻データ(位置決定データ内に記録されたもの、又は所定の時刻に取得されたもの)は、位置決定データから速度データを決定することを可能とする。
【0022】
該方法は、ナビゲーションできる区域に関連付けられた速度データを分析し、速度データの質を決定し得る。速度データの質が所定の限度以下である場合は、該方法は速度データを分類平均で置き換え得る。
【0023】
該所定の限度は、速度データを成すリーディングの絶対値、速度データの標準偏差、又は他の適切な数値で決定され得る。
【0024】
異なる実施形態では、測定された速度プロファイルの質が所定の限度以下である場合は、該方法は該ナビゲーションできる区域の測定された速度プロファイルを、より長い期間をカバする測定された速度プロファイルで置き換えるように構成され得る。例えば、該速度データは1日の期間をカバする、測定された速度プロファイルを含み得、該方法によってその速度プロファイルの質が不十分と判断されると、1週間の期間をカバする速度プロファイルで置き換えられ得る。そのような方法は、より多くのナビゲーション装置からのデータをもとに作られた、より長い期間の測定された速度プロファイルであり、より正確なプロファイルであり得るため、有利であると考えられる。
【0025】
該方法は、生成された速度プロファイルのクラスタを生成するために、測定された速度プロファイルにクラスタ分析を行う工程をさらに含み得る。
【0026】
前記少なくともいくつかのナビゲーションできる区域、一般的には各ナビゲーションできる区域に関連付けられた速度データは、前記クラスタ生成された区域を参照して置き換えられる。そのような行程は、マップデータ内に速度データを保存するためのデータ量を減らし得る。
【0027】
ある実施形態では、クラスタ生成された速度プロファイルはパラメータに従って正規化され得る。そのような方法は、クラスタ生成された速度プロファイルがより多くの測定された速度プロファイルにマップされるようにし得る。
【0028】
該方法は、ナビゲーション装置でない情報源からの位置決定データを用いることを含み得る。例えば、該方法は、携帯電話操作から由来する位置情報、料金徴収所から受信したデータ、道路またはほかのナビゲーションできる経路に埋め込まれた誘導ループから得られたデータ、ナンバープレート認識システムから得られたデータのいずれかの情報源から生成されたデータを含み得る。
【0029】
該方法は、1つ以上(一般的には複数)のナビゲーション装置にマップデータをダウンロードする工程を含み得る。
【0030】
本発明の第2の実施形態によると、機械可読な命令を記録するデータ記憶媒体であって、命令が機械によって読み込まれると第1の実施形態の方法を機械に実行させることを特徴とする記憶媒体が提供される。
【0031】
本発明の第3の実施形態によると、マップに含まれる領域内のナビゲーションできる経路の区域を表すナビゲーションできる複数の区域を含むマップデータを処理するシステムであって、少なくとも1つ(一般的には複数)のナビゲーション装置から位置決定データを受信するように構成された受信機と、前記位置決定データを処理し、前記位置決定データから速度データを生成するように構成された処理回路と、を含み、前記生成された速度データは、前記位置決定データによって前記速度データが生成された、ナビゲーションできる区域と関連付けられていおり、前記処理回路はさらに、ナビゲーション装置による使用に適切なマップデータの生成が発生された、ナビゲーションできる区域に前記速度データを関連付けれられるために、前記マップデータを前記速度データでアップデートするように構成されていることを特徴とする、システムが提供される。
【0032】
該システムはサーバによって提供され得る。代わりに、該システムはお互いに関連付けられた部品のセットによって提供され得る。
【0033】
本発明の第4の実施形態によると、機械可読な命令を記録するデータ記憶媒体であって、命令が機械によって読み込まれると、該機会を第3の実施形態のシステムとして機能させることを特徴とする記憶媒体が提供される。
【0034】
本発明の第5の実施形態によると、メモリ、を含む処理回路を備えるナビゲーション装置であって、前記装置のユーザを誘導する経路の指示のセットを生成するために、前記メモリに保持されたマップデータを処理し、前記装置によって生成された位置決定データを前記メモリ内に保存し、前記ナビゲーション装置から遠隔であるサーバへ前記位置決定データをアップロードするように構成された装置が提供される。
【0035】
本発明の第6の実施形態によると、命令を含む、機械可読な記憶媒体であって、機械によって読み込まれると前記機械を第5の実施形態のナビゲーション装置として機能させる媒体が提供される。。
【0036】
本発明の上記実施形態のいずれにおいても、機械可読な記憶媒体は下記の媒体のいずれかを含み得る:フロッピディスク、CD−ROM、DVD−ROM/RAM(−R/−RW及び+R/+RWを含む)、ハードディスク、メモリ(USBメモリキー、SDカード、メモリスティック(登録商標)、コンパクトフラッシュ(登録商標)カード、又は同様のもの)、テープ、他の光磁気記憶媒体、送信された信号(インターネットのダウンロード、FTPトランスファなどを含む)、ワイヤ、又は他の適切な媒体。
【図面の簡単な説明】
【0037】
【図1】ナビゲーション装置によって利用できるGPSシステムの例を概略的に示す図である。
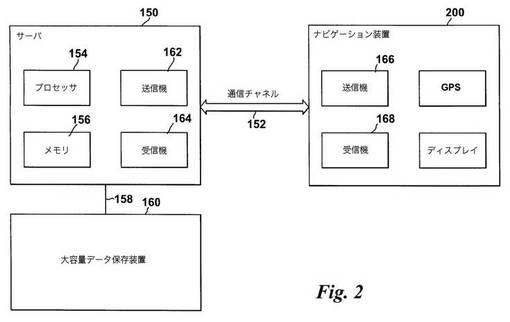
【図2】ナビゲーション装置とサーバとの間における通信のための通信システムの概略図である。
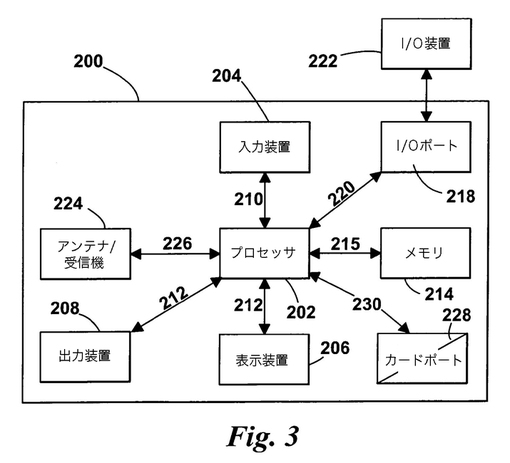
【図3】図2のナビゲーション装置または他の適切なナビゲーション装置の電子構成要素の概略図である。
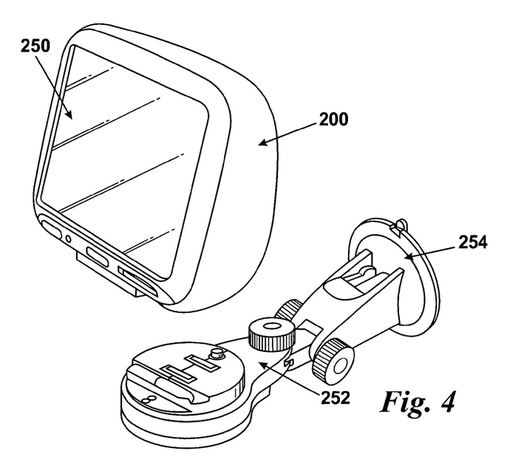
【図4】ナビゲーション装置の取り付け及び/又はドッキングの配置を示す概略図である。
【図5】図3のナビゲーション装置に使われる構成スタックの概略図である。
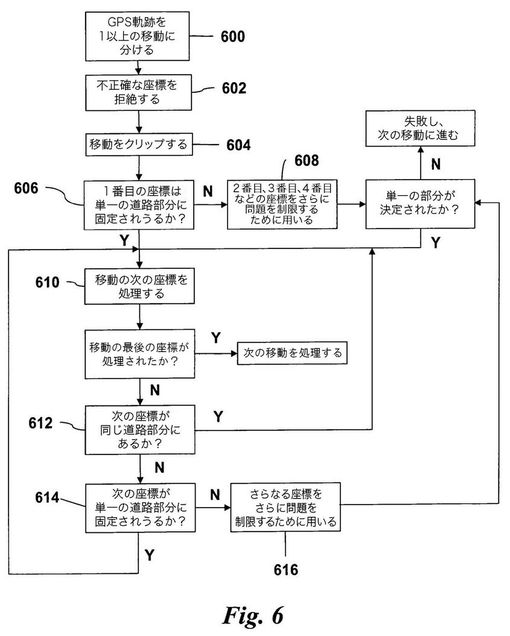
【図6】A trace内のGPSの定置とマップとを関連付ける実施形態を概説するフローチャートである。
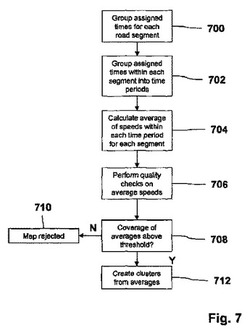
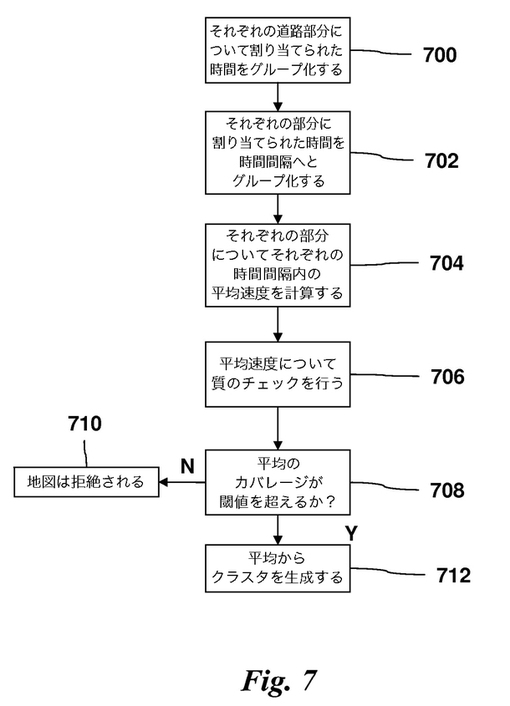
【図7】平均値を求めるための実施形態を概説するフローチャートである。
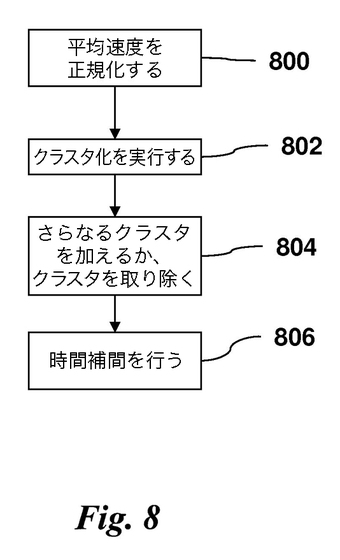
【図8】平均値について クラスタ形成を実行するための実施形態を概説するフローチャートである。
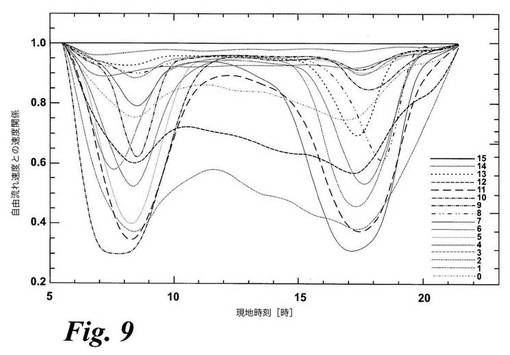
【図9】クラスタによって生成され、クラスタリング・アルゴリズムの出力である速度プロファイルのセットの一例を示す図である。
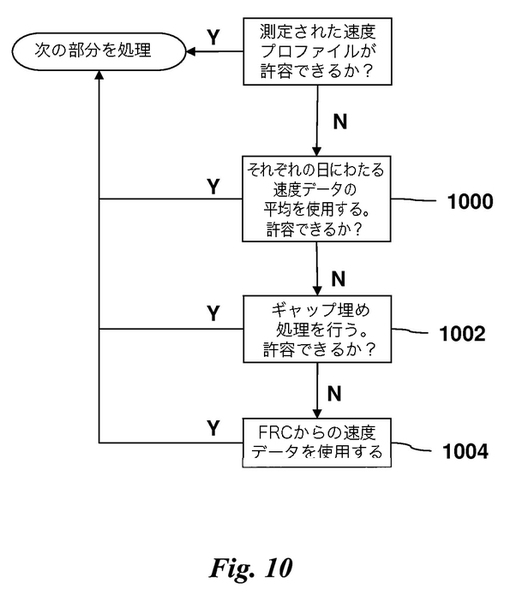
【図10】道路の区域に関連付けられた、測定された速度プロファイルの質を改善させるために用いられるfallback strategyを概説するフローチャートである。
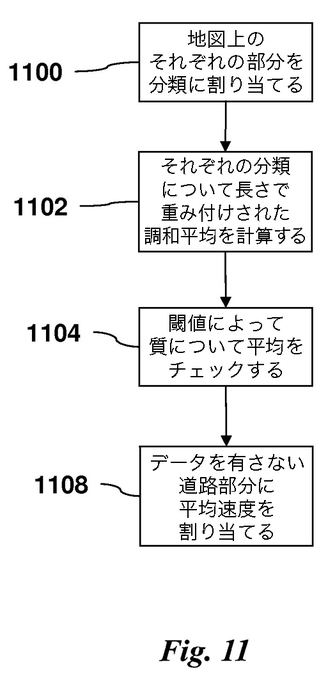
【図11】測定された速度プロファイルデータの質がどのように改善されたかを概説するフローチャートである。
【図12】クラスタによって生成された速度プロファイルが、少なくとも1つのマップの道路区域とどのように関連付けられるかを概説するフローチャートである。
【発明を実施するための形態】
【0038】
下記の説明全体を通して、類似の要素には同じ参照番号が使用される。
【0039】
本発明の実施形態は、PNDに関連付けられた形で説明される。しかし、本発明はPNDに限定されるものではなく、ルートプランニング 及びナビゲーション機能を提供するようにナビゲーションソフトウェアを携帯形式で実行するように構成された任意の制御演算装置に普遍的に適用できることは明らかである。したがって、本発明によるナビゲーション装置は任意の(限定されることなく)経路計画及びナビゲーション装置も含むべきであり、PND、自動車のような乗り物、又は経路計画及びナビゲーションソフトウェアを実行する携帯用PC,移動電話、又はパーソナル・デジタル・アシスタント(PDA)などのような携帯コンピューティング資源など、任意の実施形態でもよい。
【0040】
さらに、本発明の実施得形態は道路区域に関連付けて説明されている。しかし、本発明は道、川、運河、サイクリングロード、運河、鉄道線路などの区域のような、ナビゲーションの対象となり得る区域に適用できることは明らかである。これらの区域は、参照の簡略化のため道路区域として一般的に参照される。
【0041】
ある地点からもう1つの地点までをナビゲートするためでなく、単純にある場所の視覚的情報がほしい場合などでも本発明が用いられることは下記の説明によって明らかになる。そのような場合は、ユーザによって選択された「目的地」は、対応する出発点ではなくてもよく、したがってそのような場合は「目的地」の位置または「目的地」の視覚的情報を参照することは、経路の生成や「目的地」への移動が必要であることを意味することではない。また、目的地が存在することは、対応する出発点の指定が必要であることを意味することではない。
【0042】
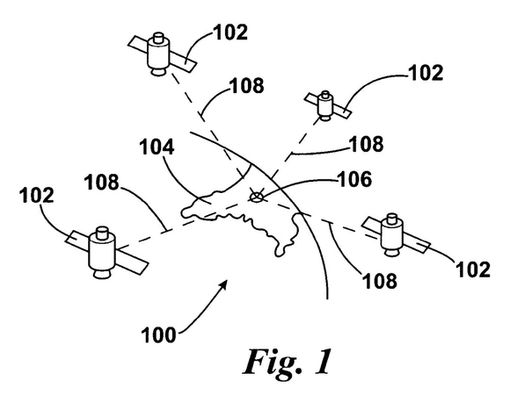
上記のことを念頭において、図1のGPS及び類似するものは様々な目的に用いられる。一般的に、GPSは衛星ラジオに基づいたナビゲーションシステムであり、連続的な位置、速度、時間、及び場合によっては制限されない数のユーザの道案内情報を決定することが可能である。以前はNAVSTARという名前で知られていたGPSは、非常に正確な軌道で地球周りを回っている複数の人工衛星を含む。これらの正確な軌道に基づいて、GPS人工衛星は自らの位置をGPSデータとして任意の数の受信ユニットにでも中継することができる。しかし、GLONASS,European Galileo positioning system, Compass positioning system,またはIRNSS(Indian Regional Navigational Satellite System)などのGPSシステムが使われ得ることは理解されるべきである。
【0043】
GPSシステムは、GPSデータを受信するように装備された装置がGPS人工衛星の信号を探してラジオ周波数をスキャンし始めると実施される。GPS人工衛星からラジオ信号を受信すると、装置は複数の周知方法の1つの方法で該人工衛星の正確な位置を決定する。装置はほとんどの場合、3つ以上の異なる人工衛星の信号を得るまでラジオ信号のスキャンを続ける(他の三角測量方法を用いると、位置は2つの信号でも決定することができるが、一般的には行われない)。幾何学的な三角測量を実行する際には、受信機は3つの既知の位置を用いて、人工衛星に対する自らの2次元位置を決定する。これは周知の方法で可能である。更に、4つ目の人工衛星の信号を得ると、同じ幾何学的な計算を用いて周知の方法で受信機の3次元の位置を計算することが可能となる。位置及び速度データは制限されていない数のユーザによってリアルタイムで継続的に更新できる。
【0044】
図1に示されているように、GPSシステム100は地球の周りを回る複数の人工衛星102を備える。GPS受信機106はスペクトラム拡散GPS衛星データ信号108をデータとして複数の人工衛星102から受信する。スペクトラム拡散データ信号108は各人工衛星102から継続的に発信され、発信された夫々のスペクトラム拡散データ信号108はデータストリームと該データストリームが由来する特定の人工衛星102が識別できる情報とを含む。一般的にGPS受信機106は、2次元の位置を計算するために少なくとも3つの人工衛星102から来るスペクトラム拡散データ信号108を必要とする。4つ目のスペクトラム拡散データ信号を受信すると、GPS106は周知方法を用いて3次元の位置を計算することが可能になる。
【0045】
図2に示された,GPS受信機106を備える、又はGPS受信機106につながっているナビゲーション装置200(即ち、PND)は、移動電話、PDA及び/又は移動電話機能を持つ任意の装置のようなモバイルデバイス(不図示)を介して、「モバイル」または電気通信ネットワークのネットワークハードウェアとのデータセッションを成立させることが必要に応じて可能であり、例えばブルートゥース技術を用いたデジタル接続のようなデジタル接続を成立させる。その後、携帯装置はネットワークプロバイダを介して(例えばインターネットを介して)サーバ150とネットワーク接続を成立させることができる。したがって、“モバイル”ネットワーク接続はナビゲーション装置200(この装置は単独で及び/又は車両の中で移動するため「モバイル」であり得、多くの場合モバイルである)とサーバ150との間で成立でき、「リアルタイム」または少なくとも「最新」である情報のゲートウェイを提供する。
【0046】
モバイル装置と、サーバ150のような異なる装置との間に(サービスプロバイダを介して)例えばインターネットを用いてネットワーク接続を成立させることは周知の方法で実行することができる。この点において、任意の数の適切なデータ通信プロトコール(例えばTCP/IPレイヤード・プロトコール)も用いることができる。更に、モバイル装置はCDMA2000,IEEE802.11,a/b/c/g/nなどの任意の数の通信スタンダードも用いることができる。
【0047】
したがって、インターネット接続が用いられることが理解でき、該インターネット接続は、例えばデータ接続、ナビゲーション装置200に内在する移動電話または移動電話機能を介して得られる。
【0048】
図示されていないが、ナビゲーション装置200はもちろん移動電話機能を内蔵し得る(例えばアンテナを含むか、又は任意的にナビゲーション装置200の内部アンテナを使用することを含む)。ナビゲーション装置200に内蔵された移動電話機能は内部の部品及び/又は挿入式カード(例えば、加入者識別モジュール(SIM)カード)を含み得、必要な移動電話機能及び/又はアンテナなどを含む。したがって、ナビゲーション装置200に内蔵された移動電話機能はナビゲーション装置200とサーバ150との間で、他の移動装置と同様にネットワーク接続を成立させることができる。
【0049】
電話の設定には、常に変化する携帯電話のモデル、メーカなどと正しく対応できるようにブルートゥース対応のナビゲーション装置を使い得、また、例えばモデル/メーカごとの具体的な設定をナビゲーション装置側に保存して置くことが可能である。この情報のために保存されたデータは更新することができる。
【0050】
図2には、ナビゲーション装置200が一般的な(generic)通信チャンネル152を介してサーバ150とつながっている様子が示されており、該チャンネル152は数多くの異なる構成のどれを用いても実施できる。通信チャンネル152は一般的にナビゲーション装置200とサーバ150とをつなげる、伝播媒体またはパス(Path)を表す。サーバ150及びナビゲーション装置200は、その間に通信チャンネル152が成立されたとき通信が可能になる(そのような接続はモバイル装置を介するデータ接続、パソコンでインターネットを介する直接接続などであり得る)。
【0051】
通信チャンネル152は特定の通信技術に限定されるものではない。更に、通信チャンネル152は1つの通信技術に限定されるものではない。つまり、チャンネル152は様々な技術を用いる複数の通信リンクを含み得る。例えば、通信チャンネル152は電気的、光学的、及び/又は電磁気的な通信などのための通路を提供するように構成され得る。したがって、通信チャンネル152は以下のもの及びその組み合わせを含むが、これらに限定されるものではない:電気回路、ワイヤ及び同軸ケーブルなどの導電体、光ファイバ・ケーブル、変換器、無線周波数(RF) 、大気、空間など。更に、通信チャンネル152はルータ、リピータ、バッファ、送信機、受信機などの中間装置を含み得る。
【0052】
1つの例示的な構成では、通信チャンネル152は電話及びコンピュータネットワークを含む。更に、通信チャンネル152は、赤外線通信、マイクロ波周波数通信のような無線周波数通信などのワイヤレス通信を提供し得る。更に、通信チャンネル152は、人工衛星通信も可能である。
【0053】
通信チャンネル152を介して発信される通信信号には、ある通信技術に必要又は好ましい信号を含むが、これらに限定されない。例えば、信号は時分割多元接続(TDMA)、周波数分割多元接続(FDMA)、符号分割多元接続(CDMA)、グローバル・システム・フォー・モバイル・コミュニケーションズ(GSM)、汎用パケット無線システム(GPRS)などの移動体通信技術を用いるように構成され得る。デジタル及びアナログの両方の信号が通信チャンネル152を介して送信され得る。これらの信号は通信技術に応じて調節、暗号化、及び/又は圧縮された信号であり得る。
【0054】
サーバ150は、図示されていない要素に加えて、メモリ156に接続され、さらに有線又は無線接続158によって大量データ保存装置160に動作可能なように接続された、プロセッサ154を備える。大量データ保存装置160にはナビゲーションデータ及びマップ情報が保存されており、サーバ150とは別個の装置であり得、又はサーバ150の中に含まれ得る。プロセッサ154はさらに送信機162及び受信機164に動作可能なように接続されており、情報を通信チャンネル152を介してナビゲーション装置200との送受信を行う。送受信された信号はデータ、通信、及び/又は他の伝播された信号であり得る。送信機162及び受信機164は、ナビゲーションシステム200の通信構成に使用された通信要件及び通信技術に応じて選択または設計され得る。更に、送信機162及び受信機164の機能は、1つの送受信機に合体され得る。
【0055】
上記のように、ナビゲーション装置200は、通信チャンネル152を介してサーバとの通信が可能であり、通信チャンネル152を介して送信機166及び受信機168を用いて信号及び/又はデータを送受信する。これらの装置はサーバ150以外の装置との通信にも用いられ得る。更に、送信機166及び受信機168は、ナビゲーションシステム200の通信構成に使用された通信要件及び通信技術に応じて選択または設計され、送信機166及び受信機168の機能は図2に関連付けて上記に説明されているように1つの送受信機に合体され得る。もちろん、ナビゲーション装置200は他のハードウェア及び/又は機能的部品を備えており、これらは後で詳細に説明される。
【0056】
サーバメモリ156に保存されたソフトウェアはプロセッサ154に命令を提供し、サーバ150がナビゲーション装置200にサービスを提供できるようにする。サーバ150によって提供される1つのサービスは、ナビゲーション装置200からのリクエストを処理することと、ナビゲーションデータを大量データ保存装置160からナビゲーション装置200に送信することとを含む。サーバ150によって提供できるもう1つのサービスは、希望されるアプリケーションのために様々なアルゴリズムを用いてナビゲーションデータを処理することと、これらの計算の結果をナビゲーション装置200に送信することとを含む。
【0057】
サーバ150は、ナビゲーション装置200が無線チャンネルを介してアクセスできる遠隔のデータ・ソースである。サーバ150は、ローカルエリア・ネットワーク(LAN),広域ネットワーク(WAN),仮想プライベート・ネットワーク(VPN)などに含まれるネットワークサーバを含み得る。
【0058】
サーバ150はデスクトップまたはノートブックのようなパソコンを含み得、通信チャンネル152はパソコンとナビゲーション装置200とを接続させるケーブルであり得る。代わりに、パソコンをナビゲーション装置200とサーバ150との間において接続させ、サーバ150とナビゲーション装置200との間にインターネット接続を成立させるようにし得る。
【0059】
ナビゲーション装置200には情報ダウンロードを介してサーバ150から情報が提供され得、該情報は時々またはユーザがナビゲーション装置200をサーバに接続させた際、自動的に更新され得、及び/又は無線移動接続装置及びTCP/IP接続などを介して、サーバ150とナビゲーション装置200との間でより継続的で頻繁に接続が成立される場合はよりダイナミックに更新され得る。多くの計算を処理するためには、サーバ150にあるプロセッサ154を用いてその大半を処理することができるが、ナビゲーション装置200のプロセッサ(不図示)も大量の処理や計算を行うことができ、多くの場合はサーバ150への接続と関係なくそのような作業が可能である。
図3を参照すると、ナビゲーション装置200のブロック図はナビゲーション装置200の全ての構成要素が含まれているのではなく、いくつかの例示的な部品を示していることが明らかである。ナビゲーション装置200はハウジングの中に配置されている(不図示)。ナビゲーション装置200は、例えば上記のプロセッサ202を備える処理回路を含み、プロセッサ200は入力装置204及び表示画面206のような表示装置に連結されている。入力装置204の数はいくつでもよく、キーボード装置、音声入力装置、タッチパネル及び/又は他の周知の情報入力装置を含み得る。同様に、表示画面206は任意の表示画面であり得、例えば液晶表示(LCD)などを含み得る。
【0060】
ある構成では、入力装置204と表示画面206が、タッチパネルのような入力兼表示装置として一体化されており、一体化された入力兼表示装置は情報の入力(直接入力、メニュー選択など)及び情報の表示の両方を可能にするタッチパッドまたはタッチ画面入力250を含み、これによってユーザは常時画面206の一部をタッチすることだけで、表示された複数の選択肢の1つを選択したり、複数のバーチュアル或いは“ソフト”ボタンを押すことが可能となる。これに関しては、プロセッサ202は、タッチスクリーンとともに作動するグラフィカル・ユーザー・インターフェース(GUI)を支持する。
【0061】
ナビゲーション装置200において、プロセッサ202は接続210を介して入力装置204に動作可能なように接続され、入力装置204からの入力情報を受信することができ、さらには少なくとも1つの表示画面206及び出力装置208に夫々の出力接続212を介して情報を出力するように接続されている。ナビゲーション装置200は、例えば音声出力装置(例えばスピーカ)などの出力装置208を備え得る。出力装置208は、ナビゲーション装置200のユーザに音声情報を生成できるように、入力装置204も同様にマイク及び音声入力指示を受け取るソフトウェアを含むことができる。更に、ナビゲーション装置200は追加的な入力装置204及び/又は出力装置を備え得、例えば音声入力/出力装置を備え得る。
【0062】
プロセッサ202は接続216を介してメモリ214に動作可能なように接続されており、接続220を介して入力/出力(I/O)ポート218と情報を送受信できるように構成されており、I/Oポート218はナビゲーション装置200の外部装置であるI/O装置222に接続可能である。外部I/O装置222は、イヤピースのような外部聴取装置を含み得るが、これに限定されない。I/O装置222への接続は有線又は無線を介する任意の外部装置への接続であり得、例えばハンズフリー操作及び/又は音声作動を可能にするカーステレオユニットへの接続、イヤピースやヘッドフォンへの接続、及び/又は携帯電話への接続などがあり、携帯電話への接続はナビゲーション装置200とインターネット又は他の任意のネットワークとの接続を成立させるために用いられ、及び/又はインターネットまたは他のネットワークを介してサーバへの接続を成立させるために用いられ得る。
【0063】
ナビゲーション装置200のメモリ214は不揮発性メモリ(例えばプログラムコードを保存するため)の一部、及び揮発性メモリ(例えばプログラムコードが実行されるとデータを保存するため)の一部を備える。ナビゲーション装置は更にポート228を備え、ポート228は接続230を介してプロセッサ202と通信し、取り外し可能なメモリカード(一般的にカードと呼ばれる)が装置200に入れられるようにする。説明される実施形態では、ポートにはSD(Secure Digital)カードが加えられるように構成されている。他の実施形態では、ポートは異なる形式のメモリ(例えばコンパクトフラッシュ(登録商標)(CF)カード、メモリスティック(登録商標)、xDメモリカード、USB(Universal Serial Bus)フラッシュドライブ、MMC(マルチメディア)カード、スマートメディアカード、マイクロドライブ等)が接続できるようにし得る。
【0064】
図3は、接続226を介する、プロセッサ202とアンテナ/受信機224との間の動作可能接続をさらに示しており、アンテナ/受信機224は例えばGPSアンテナ/受信機であり得、したがって図1のGPS受信機のように機能する。参照番号224で指定されたアンテナ及び受信機は、説明のために概略的に1つとしてあらわしているが、アンテナ及び受信機は異なる位置に配置される部品であり得、アンテナは例えばGPSパッチアンテナ又はらせん状のアンテナであり得る。
【0065】
当業者であれば、図3に示された電子部品は1つ以上の電源(不図示)によって従来のように電力が供給されることは明らかである。そのような電源は内部電池及び/又は低電圧直流(DC)電源の入力または他の任意の 適切な構成をも含み得る。当業者には明らかであるように、図3に示された部品の異なる配置も考えられる。例えば、図3に示された部品は、有線及び/又は無線の通信及びそのようなものによってお互いに通信し得る。したがって、ここに説明されるナビゲーション装置200は携帯又はハンドヘルドのナビゲーション装置200であり得る。
【0066】
さらに、図3の携帯又はハンドヘルド・ナビゲーション装置200は、周知の様式で自転車、オートバイ、車、又はボートのような乗り物につなげる、又は「ドッキング」させることができる。そのようなナビゲーション装置200は、携帯又はハンドヘルド使用のためドッキング位置から取り外すことができる。異なる実施形態では、ユーザのナビゲーションを可能にするために、装置200はハンドヘルド装置として構成され得る。
【0067】
図4を参照すると、ナビゲーション装置200は、一体化された入力兼表示装置206及び図2に示されたほかの部品(内部GPS受信機224、プロセッサ202、電源(不図示)、メモリシステム214などを含むが、これらに限定されない)を含む1つのユニットであり得る。
【0068】
ナビゲーション装置200は、アーム252に固定され得、アーム252は乗り物のダッシュボード/窓などに吸着カップ254を用いて固定され得る。このアーム252は、ナビゲーション装置200がドッキングされ得るドッキング・ステーションの一例である。ナビゲーション装置200は、例えばアーム252にカチッとはまるような結合でドッキング又は結合され得る。すると、ナビゲーション装置200はアーム252に対して回転可能になり得る。ナビゲーション装置200とドッキング・ステーションとの結合を分離させるためには、例えば、ナビゲーション装置200のボタンを押すことで外れるようにし得る。ナビゲーション装置200とドッキング・ステーションとの結合及び分離に適している構成は、当業者には周知である。
【0069】
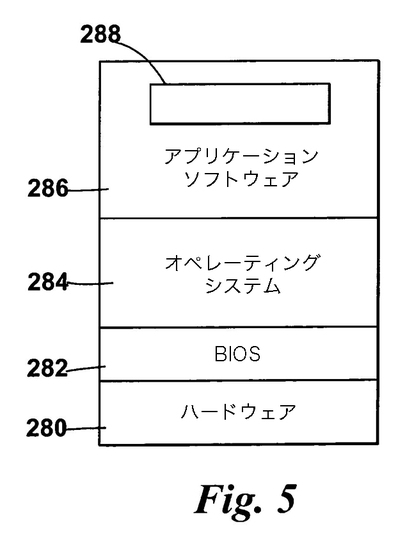
図5を参照すると、プロセッサ202及びメモリ214はお互いに協力して、ナビゲーション装置200の機能的ハードウェア部品280と、装置によって実行されるソフトウェアとの間のインタフェースとして機能するBIOS(Basic Input/Output System)を支持する。次に、プロセッサ202はメモリ214からオペレーティング・システム284をロードし、(既述したルート計画機能及びナビゲーション機能のいくつか又は全てを実行する)アプリケーションソフト286が実行できるような環境を整える。アプリケーションソフト286は、マップの表示、ルート計画、ナビゲーション機能及び他の関連する機能などのナビゲーション装置の中心的な機能をサポートするGUIを含む、操作環境を提供する。この点において、アプリケーションソフト286の一部はビュー生成モジュール288を備える。
【0070】
説明されている実施形態では、ナビゲーション装置のプロセッサ202は、アンテナによって受信されたGPSデータを受信するように、そして時々そのGPSデータをその受信時のタイムスタンプと共にメモリ214保存し、ナビゲーション装置の位置記録を蓄積するように、プログラムされている。そのように保存されたデータ記録はGPSの測定位置と考えられ得る。即ち、ナビゲーション装置の位置の測定位置であり、緯度、経度、タイムスタンプ、及び精度レポートを備える。
【0071】
ある実施形態では、データは実質的には定期的に保存され、例えば5秒ごとに保存され得る。当業者には他の間隔を用いることが可能であることが明らかであり、データの分解能とメモリの容量のバランスがあることが明らかである(即ち、データをより多くとることでデータ分解能は上がるが、そのデータを保存するためにより大きいメモリ容量が必要となる)。しかし、異なる実施形態では、データの分解能は実質的に1秒ごと、10秒ごと、15秒ごと20秒ごと、30秒ごと、45秒ごと、1分ごと、2,5分ごと(または、これらの間の任意の間隔)であり得る。したがって、装置のメモリには、様々な時点における装置200の位置に関する記録が蓄積されている。
【0072】
ある実施形態では、間隔が長くなると、得られるデータの質が低下することがあり得、低下の程度はナビゲーション装置200の移動速度にもよるが、間隔の時間として15秒が、適切な上限となり得る。
【0073】
ナビゲーション装置200は一般的に自らの位置に関する記録を蓄積するように構成されているが、ある実施形態では移動の開始時又は終了時においてデータの記録を所定の期間行わない。そのような構成を用いることで、ユーザの家屋及びユーザが頻繁に訪れる場所などを保護することが可能となり、ナビゲーション装置200のユーザのプライバシーを守ることができる。例えば、ナビゲーション装置200は移動開始から約5分又は約1マイル(1.6km)に関するデータを保存しないように構成され得る。
【0074】
異なる実施形態では、GPSは定期的に保存される訳ではなく、所定のイベントが発生するとメモリに保存されるように構成され得る。例えば、プロセッサ202は、道路の分岐点、道路区域の変更、又はそのようなイベントが発生するとGPSデータを保存するようにプログラムされ得る。
【0075】
さらに、プロセッサ202は、時々装置200の位置に関する記録(即ち、GPSデータ及びタイムスタンプ)をサーバ150にアップロードするように構成されている。ナビゲーション装置200が常在又はほぼ常在する通信チャンネル152を持つような実施形態では、通信チャンネル152によるサーバ150への接続及びデータのアップロードは定期的に行われ、例えば24時間ごとに行われ得る。当業者には、他の間隔を用いることも可能であることが明らかであり、その間隔は15分、30分、1時間、2時間、5時間、12時間、2日、1週間、又はこれらの間の任意の間隔であっても良い。そのような実施形態においては、プロセッサ202は、位置の記録を実質的にリアルタイムでアップロードするように構成され得、このような構成はデータ送信の間隔が短くなることを意味し、疑似リアルタイムと考えることがより正しい。そのような疑似リアルタイム実施形態では、ナビゲーション装置はメモリ214内、又はポート228に挿入されたカード内にGPS測定位置をバッファできるように構成され得、又、所定の数の測定位置が保存されるとこれらを送信するように構成され得る。この所定の数は20、36、100、200程度、又はそれらの間の任意の数でもあり得る。当業者には、この所定の数はメモリ214/ポート228のカードの容量にある程度支配されることが明らかである。
【0076】
常在する通信チャンネル152を持たない異なる実施形態では、プロセッサ202は、通信チャンネル152が作られるとサーバ150に記録をアップロードするように構成され得る。通信チャンネル152が作られることは、例えばナビゲーション装置200がユーザのコンピュータに接続される時などである。このような実施形態でも、ナビゲーション装置200はメモリ214内、又はポート228に挿入されたカード内においてGPS測定位置をバッファできるように構成され得る。メモリ214又はポート228に挿入されたカードがGPS測定位置 で満たされた場合はナビゲーション装置は最古のGPS測定位置を削除するように構成され得、したがって先入れ先出し(FIFO)バッファであると考えられる。
【0077】
説明される実施形態では、位置の記録は1つ以上の軌跡を含み、夫々の軌跡は24時間の期間内のナビゲーション装置200の移動を表す。それぞれの24時間の期間は暦日と一致するように構成されているが、必ずしもこのようにする必要はない。
【0078】
一般的に、ナビゲーション装置200のユーザは、装置の位置に関する記憶がサーバ150にアップロードされることに対して承認する。承認が得られなかった場合は、記録はサーバにアップロードされない。ナビゲーション装置及び/又は装置が接続されたコンピュータは、位置記録の使用に関してユーザに承認を要請するように構成され得る。
【0079】
サーバ150は装置の位置記録を受信し、処理のため大量データ保存装置160に保存するように構成されている。したがって、ナビゲーション装置200がアップロードした、複数の装置の位置記録が、時間とともに大量データ保存装置160に蓄積される。
【0080】
上記のように、大量データ保存装置はマップデータも保存し得る。そのようなマップデータは、道路区域、注目すべき場所の位置など、マップに載っている一般的な情報を提供する。
【0081】
最初の工程として、サーバ150はマップデータと、受信した位置記録に含まれるGPS測定位置とのマップマッチング機能を行うように構成されており、そのような工程は、図6に関連付けて説明されている。そのようなマップマッチングは、位置記録は受信されているため、いわゆるリアルタイムで行われてもよく、又は大量データ保存装置160から位置記録が再び読み込まれた際に行っても良い。
【0082】
マップマッチングの精度を改善させるために、下記のように位置記録の前処理を行う。各GPS軌跡(即ち、24時間分のGPSデータ)は1つ以上の移動に分けられ(600)、各移動はナビゲーション装置200の1つの移動であり、後の処理のために保存されたものを表す。
【0083】
各移動において、ナビゲーション装置から受信したGPS測定位置の中で精度に関するレポートが十分に高くないものは拒絶される。したがって、ある実施形態では、ある測定位置に関して3つ未満の人工衛星102からのシグナルしかナビゲーション装置200に受信できていない場合は、その測定位置は拒絶され得る。更に、各移動は、2つの測定位置間の報告された時間がある限界の値を超えると区切られる(604)。この前処理工程を通った各移動はマップマッチングの方に通される。
【0084】
これに関連して、区切られた移動は、連続したGPS測定位置の間に、所定の時間よりも大きい所定の時間間隔が存在する移動である。 したがって、乗り物が停止したことが推論でき、最初の移動が終わり、2番目の移動が始まったと考えるべきである。したがって、区切られた移動は、2つの別個の移動となる。
【0085】
しかし、GPSの信号が届かなかったことが原因でGPS定位の間にギャップが生じることもあり得るため、1つの移動を区切る前に、乗り物の位置が変わったかをチェックする。そして、そのような状況である場合は移動を区切ることは行わない。説明される実施形態では、この所定の時間はおおよそ3分である。しかし、15秒、30秒、1分、90秒、2分、5分、10分、又はこれらの間の任意の時間など、他の任意の適切な時間が該所定の時間として用いられることは当業者には明らかである。ここに説明されるように、GPS測定位置を送信するナビゲーション装置200の平均速度がある所定の限度より低い場合、ある実施形態では、データは後の処理において拒絶され得る。そのような実施形態は、衝突などの事故後に発生し得る渋滞に関する情報を排除し、定常状態の交通の流れをより正確に表すデータを残すため、有用であり得る。
【0086】
次に、各移動を順に取り、その移動に含まれる定位をマップデータ内のマップにマッチングする。各マップは複数の道路区域を備えており、道路区域に沿って移動することが可能であり、各区域は直線のベクトルでマップ上に表わされている。
【0087】
サーバ150のプロセッサ154において実行されているプログラムコードは、ある区域の中に位置する測定位置、又はある区域内で発生したと考えても良いほど(即ち、該区域の距離限度内にある)その区域に十分に近い測定位置が見つかるまで処理中の測定位置から離れるように構成されたマップマッチング機能 を提供する。この限度を用いることで、100%以下のGPS精度を許し、道路を直線状のベクトルに分解して得られる圧縮効果を可能とする。
【0088】
各移動は最初の測定位置(即ち、移動における1番目の測定位置)を持っており、この最初の測定位置は、区域の選択を絞るために使え得る同定された測定位置がまだ存在しないため、同じ移動内における他の測定位置より、区域と関連付けることが難しい。もし、複数の区域が1番目の測定位置の限度内に含まれる場合は(606)、アルゴリズムは、同じ移動内における次のGPS測定位置(即ち、2番目の測定位置)を参照し、2つの測定位置間(即ち、1番目の測定位置と2番目の測定位置の間)の距離に対応して可能な動きに基づいて、複数の区域からいくつかのルートのセットを生成する。2番目の測定位置を用いても、1番目の測定位置に関して1つの区域候補に至らない場合は、アルゴリズムは同じ移動内の3番目の測定位置に移り、1番目の測定位置に関して1つの候補を探し出すために、可能性のあるルートを生成し、比較する。この工程は、1つの移動における残りのGPS測定位置が処理されるまで続く。
【0089】
このような実施形態の利点は、1番目の測定位置だけでは複数の区域の近辺に存在し得、そしてこれらの区域を区別することはできないが、更なる動き(即ち、2番目及び3番目の測定位置)を用いることで、1番目の測定位置に関連する区域の正体を決定することが可能になる。したがって、移動の1番目の区域はマップマッチング機能 によって決定される。移動の1番目の区域が決定されると、更なる区域を同定するために更なる測定位置を処理する。もちろん、次の測定位置が1番目の測定位置と同じ区域内に位置することは可能である(612)。
【0090】
したがって、移動におけるその後の測定位置は、同じ区域の距離限度内に含まれるかを決定するために処理され(610)、マップマッチング機能はその区域と距離限度内に位置する測定位置とを関連付けるように構成されている。マップマッチング機能によって処理された測定位置が距離限度内に入っていないと、その測定位置に対応する新たな区域候補を生成するように構成されている。しかし、次の区域が、直前に処理された区域の端につながるようにする限定を加えることも可能である。これらの隣接する区域は、基礎をなすマップデータからマップマッチング機能によって得られる。
【0091】
距離限度内に存在する区域がないこと、又は1つの区域に絞ることができないことにより、前の区域に続くある測定位置に対してマップマッチング機能が区域を同定できない場合は、単独のマッチが成立する1つの区域を同定するまで移動を制約するために、マップマッチング機能は更なる測定位置を探り続ける(616)。つまり、n番目の定位が1つだけの区域に関連付けられない場合、区域の同定をさらに絞るためにn+1番目の測定位置を用いる。n+1番目の定位が1つの区域の同定につながらない場合は、n+2番目の測定位置を用いる。いくつかの実施形態では、この処理は1つだけの区域が同定されるまで、又は移動内の全てのGPS測定位置が同定されるまで、続けられる。
【0092】
マップマッチング機能は単独の区域を同定するように構成されている。説明される実施形態では、マップマッチング機能は継続する経路を作ることを試みることなく、ただ区域を測定位置にマッチングしていく。異なる実施形態では、マップマッチング機能は継続する経路を作ることが望ましい。
【0093】
したがって、処理が終わるとマップマッチング機能は、分析中の移動においてナビゲーション装置200の動きが沿った道路区域の一連を取得する。次に、マップマッチング機能はこれらの道路区域を処理し、GPS測定位置から進入時間及び該区域の通過時間を割り当てる。これらの割り当てられた時間は、後の処理のため大量データ保存装置160に保存される。各区域に複数のGPS測定位置が保存されていることもあり得る。しかし、各区域に対して関連付けられたGPS測定位置の数がいくつであれ、区域における平均速度は入っている時間、GPS定位及び区域の長さ(この実施形態ではマップデータ内に保存されている)を用いて計算される。この平均速度は、対応する割り当てられた時間及び区域と関連付けられ、大量データ保存装置160に保存される。道路区域における交通の流れの速度に関連し、その区域に割り当てられた情報は、その道路区域の速度データにとして考えられ得る。
【0094】
サーバ150は、割り当てられた時間を処理し、それから1つ以上の平均値を下記のように生成する平均値機能を提供するために、平均値を計算するプログラムコードをプロセッサ154において実行するように構成されている。この実施形態で用いられる平均値計算工程は、図7を参照しながら説明される。
【0095】
工程の第1ステップ(700)では、平均値機能は、処理中のマップにおける各道路区域の平均速度をグループ化する。各道路区域のグループにおいて、平均値機能は、所定の時間間隔内の平均速度をグループ化するようにさらに構成されている(702)。したがって、同じ時間内(たとえば、8:00AMから8:59AMの間)で発生する平均速度は同じグループに含まれ、更に分析される。説明されている実施形態では、時間は1時間であるが、必ずしも1時間であることはなく、時間の長さを短くするとデータの分解能は上がるが、同時に保存に必要な容量も増えてしまうことは当業者には明らかであろう。他の適切な時間としては、実質的に、1分、5分、10分、15分、30分、2時間、6時間、12時間、またはこれらの間の任意の時間でもよい。
【0096】
ここで説明されている実施形態では、平均速度は、中央標準時間ではなく 、処理されるマップに含まれる領域の現地時間で保存されている。そのような方法は、交通に関するものに関する自然な基盤を提供するため、便利である。
【0097】
1つの移動において発生した平均速度が所定の時間にグループ化される前に、平均速度はデータの質を改善させるために選別される。この実施形態では、所定の範囲内に含まれる平均速度だけがグループに追加される。この実施形態では、所定の速度上限(180km/hなど)を超える速度を排除し、所定の速度下限(2km/h)を下回る速度も排除する。当業者には、ある区域の平均速度をはるかに下回る速度は、その区域における交通の問題(例えば、渋滞など)と関連があり得ることが明らかであろう。したがって、そのような状況に関するデータを含むことは、通常の状態を示すものとして考える場合、全体の精度を低下させ得る。他の実施形態では、許可される最大の速度は、その区域の制限速度であり得るが、そのような情報は処理されるマップデータにおいては不正確であり得ること、そしてある区域の制限速度は実際にその区域の交通状況を正確に表すものではないこともあり得るというのは、当業者には明らかである。
【0098】
所定の時間にグループ化することが実行されると、道路区域ごとの平均速度が所定の時間ごとに計算される。例えば、8:00AMから8:59AMまでの時間における全ての速度が、道路区域ごとに平均化される。平均速度を計算するためにはいくつかの選択肢があり、算術平均又は調和平均を用いる方法、或いは中央値を計算する方法がある。実際に、ある実施形態では、後の用途によって異なるデータセットに異なる重みを付けることができる。
【0099】
したがって、説明されている実施形態、及び処理されるマップには、マップの各道路区域には24個の平均速度が生成されており、これらは所定の1時間の時間間隔における平均速度である。もし異なる長さの時間が用いられると、異なる数の平均速度が生成されることは明らかである。更に、全ての道路区域が全ての時間における平均速度を持っているとは限らないことも明らかであり、これは、ある道路は交通量が少なく、特に早朝などの時間帯は交通量が少ないためである。
【0100】
しかし、区域ごとの平均速度を更に使用する前に、品質のチェックが行われる(706)。この実施形態では、チェックによって所定の数以上の割り当てられた時間が平均速度の計算に用いられることを確実にする。このような条件に合わない平均速度は、更なる処理のために排除され、その区域のひとつ以上の時間においてギャップが生じるようになる。ある実施形態では、5つ以下の値が平均速度の計算に使われた場合、その平均速度は排除される。他の実施形態は、異なる数を用い得、例えば2,3,4,6,7,8,10,20個の値、又はこれらの間の任意の値をも用い得る。
【0101】
又、平均値の品質に関する更なるチェックが行われ、ここでは平均値ごとの標準偏差を、その区域のその時間の平均値を計算するために用いられたデータサンプルの数の平方根 で割る。この計算の結果が所定の限度を超える場合は、その平均値は排除され、その区域のその時間にはギャップが生じるようになる。
【0102】
更なる品質チェックを行い、下記のような平均値を排除することも可能である:データの偏差が所定の限度を超えているか、所定の限度を超える外れ値が所定の数以上あるか。当業者には、そのような統計的技術を用いてデータの品質を確実にすることは明らかであろう。
【0103】
ある道路区域の平均値のセットは、その道路区域の観測された速度プロファイル と考えられ得る。
【0104】
ある道路区域の測定された速度プロファイルに少数の速度値が欠けている場合(即ち、全て又は少なくとも大勢の所定期間は値を持っている)、その区域は処理され得、欠けている値は隠され得る。欠けた区域 の数が増えると、結果として生じるクラスタ分析の品質は低下する。したがって、幾つの期間が欠けても許可できるかは、品質に関する選択であり、ケースによって検討する必要がある。高品質の完全なデータだけを用いることは、高速道路のような交通量の多い道に過剰な重みを付けることを意味し得る。必要条件が低すぎると(即ち、多くの期間が欠けている道路区域をクラスタ化すること)は、現実的でないクラスタ及び不正確な分析をもたらす。
【0105】
これらの品質チェックを通った平均値は信頼性があるとみなされ、更なる処理に用いられることが許可される。 ステップ708では1つの道路区域当たりの平均速度のカバレージに関する分析が行われる。 信頼性のある平均値のカバレージが十分に高い場合は、マップデータは更なる処理を受ける。しかし、カバレージが所定の限度以下であればマップは排除される。許可可能なマップは、図8を参照して説明されているように、クラスタ形成のために通される。
【0106】
そのようなクラスタ形成は、速度プロファイルを自動的又は半自動的に抽出することを目的とする。後で述べるように、類似する分類の道路はその速度プロファイルも類似しているのであれば、大幅なデータの圧縮が達成できる。例えば、日曜日の午前10時の、道路の第1区域における速度は、同じ道路の第2区域における同期間の速度と類似し得る。これらの道路区域における類似性が他の時間帯においても繰り返されている場合は、第1の区域と第2の区域は、同じ速度プロファイルで表わされていると考え得る。したがって、これから定義するクラスタ化はそのような類似性を見つけることを目的とするものである。速度プロファイルの正規化も、下記のように、速度プロファイルを異なる分類の道路に用いることを可能とし得る 。
【0107】
クラスタ化を行う前に、測定された速度プロファイルは夜間の期間を合併させるためにさらに処理される。この実施形態では、9PMから5AM(即ち、8個の期間)までの平均速度が平均化され、この夜間平均がこれらの8個の期間のそれぞれとして用いられる。したがって、各速度プロファイルは9PMから8AM の間には平らなプロファイルを持っており、その道路区域の交通の
自由流れ速度であると言える。自由流れ速度は、通常車のような乗り物がその道路において移動する際の速度として考えることができ、自由流れ速度はその道路区域の制限速度とは異なり得る。また、自由流れ速度はその道路区域の制限速度とほぼ同じであり得る。
【0108】
第1のステップ800では、クラスタの数を制限するために、測定された速度プロファイルを正規化させる。そのような正規化はいくつかの基準に従って行い得る。説明されている実施形態では、正規化は、ある平均速度と関連付けられた道路区域について計算された自由流れ速度に従って実行される。したがって、クラスタ化アルゴリズムに通される、道路区域ごとの平均速度は、0と1の間の値を持っている。そのような方法は、クラスタ化によって生成される速度プロファイルを、道路の種類から独立させることができ、同じ速度プロファイルのセットを、任意の種類の道路の区域にも用いることができるため、更なるデータ圧縮を可能にする。
【0109】
夜間の自由流れ速度を用いることは、夜間の速度値を考慮しないことを可能とするため、クラスタ形成の次元を減らせ得る。
更なる実施形態では、ある道路区域の平均速度又は制限速度を、正規化の更なる基準として用い得る。
【0110】
したがって、クラスタ化アルゴリズムを用いて類似した交通の振る舞いを見せる日を一緒にグループ化することができる。期待される交通の振る舞いが異なる場合は、クラスタ形成は独立的に実行されるべきである。クラスタ化アルゴリズムに入力されるパラメータは、希望されるクラスタの数であり、典型的な範囲は曜日ごとに10〜70個である。最適のクラスタにたどり着くための周知の方法がいくつかあり(例えば、何らかの品質指標を与えることや、トレンドによって数を増加/減少させることなど)、これらを用いてクラスタ化のアウトプットが容認できるかを決定し得る。
【0111】
ある実施形態では、クラスタ化アルゴリズムは約60クラスタを生成するように構成されている。他の実施形態では、アルゴリズムは最初はより多い又はより少ないクラスタを生成するように構成される。結果として生じるクラスタは、満足できるものであるか(例えば、実質的に同じクラスタはないか?不連続的なクラスタはないか?)を調べるために処理される。問題のあるクラスタがあれば、アルゴリズムを再実行させ、1回目より少ない数のクラスタを生成することを目標とする。この反復工程は、満足できるクラスタのセットが決定されるまで繰り返される。
【0112】
ある実施形態では、クラスタが満足できるものか は、クラスタによって生成されるプロファイルが所定の限度以上の周波数を含む かを調べるステップを含む。そのような周波数は、クラスタによって生成されたプロファイルの中に高すぎる変化率を持つ(即ち、不連続性があり得る)ことを示し、もしそのようなデータを使用すると、ナビゲーション装置200が不安定になるなどの問題が起こり得る。また、クラスタが満足できるものであるか否かは 、クラスタによって生成された速度プロファイルの各々をお互いに、又は少なくともいくつかをお互いに、比較する工程を含む。ある1つの実施形態では、これは最小二乗比較によって行われ得る。
【0113】
ある実施形態では、クラスタ 化はクラスタ分析によって行われ得るが、他のクラス構築方法を用いても良い。単純で効率的な方法としては、いわゆるK平均法がある。この非階層クラスタ分析方法は通常kランダム・シードから始まり、選択された測定基準に基づく最小エラー基準に従ってクラスのメンバの再分布を行う。このアルゴリズムは極小値にしか至らないため、最適な解決のためには複数回繰り返す必要がある。最終的なクラスタの重心は所定のクラスタを形成する。異なる実施形態では、異なるクラスタ化方法を用いられ、これらは階層的クラスタ分析及びファジークラスタリング法を含み得る。
【0114】
ある実施形態では、更なるクラスタを加え得る(804)。例えば、ある実施形態は、信頼できるパターンがない道路区域(例えば、データのカバレージが小さいため、又は交通に関連する問題などのため)に関しては、平らな線を速度プロファイルとして加え得る。
【0115】
クラスタによって生成された速度プロファイルを作成する最終的なステップ(806)として、クラスタは様々な時間分解能へと補間される。ある実施形態では、これは三次元スプラインを用いて行われるが、指数フィッティングなどの異なる方法も可能である。当業者にはそのような類似する方法が用いられ得ることが明らかである。
【0116】
クラスタ分析工程に用いられた時間分解能が、最終的に望まれるものより粗い場合(所定の時間において信頼性のある平均速度を確保するために、このようなことが起こり得る)においても、時間分解能を調整することがこの時点で可能となる。例えば、意図する使用の要件を満たすために、より細かい分解能に調整され得る。例えば、粗い時間分解能では時間的境界において大きな差が生じる個所では、より細かい時間分解能で継続的なプロファイルを用いることが有利であり得、より滑らかな経路を提供できる。説明される実施形態では、クラスタによって生成されるプロファイルは約5分の間隔の分解能を与えるために補間される。しかし他の間隔を用いても良い。そのような間隔は、クラスタによって生成された速度プロファイルを用いて処理するときに便利であり得る。
【0117】
図9は、クラスタ化アルゴリズムから得られる、マップに関する通常の結果を示しており、入力された平均速度値は、クラスタ化によって生成された独立した16個の速度プロファイルにクラスタ化されている。他の実施形態において、クラスタの数が変更されると、1つの道路区域において可能な速度プロファイルの数も変更される。
【0118】
クラスタ化によって生成された速度プロファイルの適切なセットが決定されると(この実施形態では16個が生成されている)、これらは1つ以上のマップに関連付けられる。一般的に、ある速度プロファイルのセットは、そのプロファイルの源となったマップに関してより正確であり得、これはそのマップに載っていない道路における交通現象が異なり得るからである。例えば、あるマップが1つの国を含んでいるとすると、異なる国における交通は少し違うパターンで動く可能性がある。
【0119】
しかし、異なる実施形態では、速度プロファイルは複数のマップと関連付けられ得る。このようなことは、例えばマップが国の一部を含む場合において適切であり、及び /又はマップを複数の国に用いることが適切であり得る。
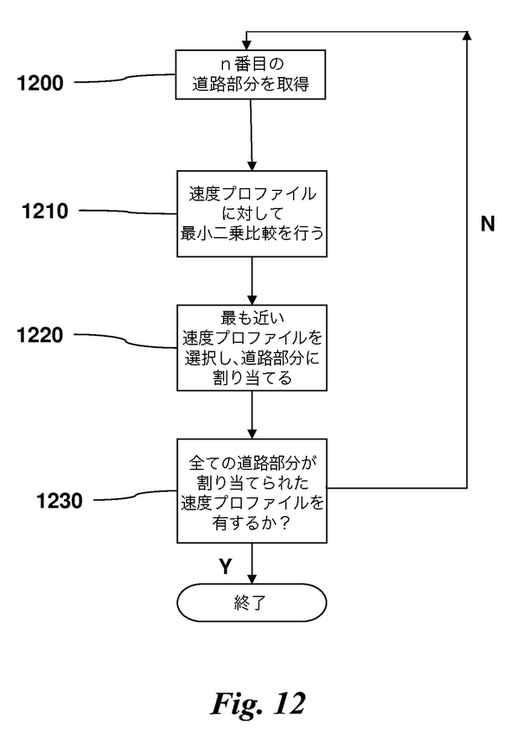
処理中のマップに存在する各道路区域は分析され、クラスタ化によって生成された1つ以上の速度プロファイルを持ち得(図9参照)、この工程は図12を参照して説明される。n=1から始まり、n番目の道路区域が処理される(1200)。
【0120】
ここで、道路区域に関連付けられた速度データに関して参照する。当業者には、各道路区域は、マップを提供するマップデータ内のデータによって表されていることは明らかである。ある実施形態には、道路区域を表すそのようなデータは、速度データへの参照を提供する識別子を含み得る。例えば、該参照は生成された速度プロファイルへの参照を提供し得る。
【0121】
PNDが処理されたマップを用いることで正確な経路を生成できるようにするためには、各道路区域が夫々高い信頼性の速度プロファイルを持つことが望ましい(第1のステップとして、測定された速度プロファイルが適切であるか評価する)。したがって、前に行った品質評価によって、測定された速度プロファイルが品質の要件を満たさないと判断された場合は、代替作戦(Fallback Strategy)を用いて、測定された速度プロファイルを、PND又は他の装置によって経路指定のために処理した際によりいい結果を出し得る速度データで置き換える。
【0122】
測定された速度プロファイルが実際に不適切であると判断された場合、測定された速度プロファイルの代わりに、その道路区域において収集された全ての速度データの平均値を含む処理された道路区域についての平均速度1000を代替状態として用いる。即ち、各日の各期間において収集されたデータの平均値を求め、1つの速度を生成する。この1つの速度はやがて、フラット・クラスタ化によって生成された速度プロファイル(図9の15番) に割り当てられ得る 。
【0123】
次に、ある区域に対して収集されたデータから得られた平均速度を受け入れられるかを決定する。平均値がこれらのチェックを通ると、その平均値はその道路区域に使用される。
【0124】
統計学の当業者には、平均値の品質を測るための方法が明らかであろう。例えば、ある実施形態では平均値は所定の数以上の速度から生成されなければならないという条件があり得、その数は例えば10個の速度であり得る。平均値が最低値(例えば、2km/h)以上、及び/又は最高値(例えば、150km/h)以下のものであることを確実にするため、平均値に限度を適用し得る。また、平均値の品質が十分であるかを決定するために標準偏差を用い得る。
【0125】
道路区域は、マップデータ内において分類体系によって分類され得ることが知られており、それによって類似する特徴を持つ道路区域は同じ分類に分かれる。例えば、1つの関係者によって生成されたあるマップには、道路区域が分類される8個の分類がある。ある実施形態では、所定の道路区域についての分類に含まれる道路の所定の割合以上が、平均値の生成に使われる速度を提供することを保証するために、所定の道路区域の平均値が分析される。このテストが成功しないと、平均値が拒絶されることだけでなく、次に説明される、ギャップを埋める工程も省略され得る。
【0126】
道路区域における交通の流れが2つの方向に可能である場合、夫々の方向に対する平均速度が存在する。
【0127】
測定された速度プロファイルが代替作戦において置き換えられた場合、図9のクラスタ速度プロファイル15番のような平らな線を含む速度プロファイルが事実上存在することが明らかであろう。また、速度プロファイル情報は正規化されているため、速度プロファイル15番は、1つの平均速度が関連付けられたどんな道路区域を表すためにも用いられ得る。
【0128】
ある区域において収集されたデータから得られた平均速度がいまだに品質チェックを通らない場合は、代替作戦のつぎのステップ(1002)が用いられ、図11を用いて次に説明する、いわゆるギャップ埋め工程が使用される。第1ステップとして、処理されるマップに存在する各道路区域は、所定数の分類のうちの1つの分類として分類される(1100)。当業者には、この分類が1回のみ行われればいいことが明らかであり、結果として生じる分類は、ギャップ埋め工程が行われるさらなる道路区域のために保たれる。もちろん、他の実施形態では、ギャップ埋め工程が行われるたびに計算しなおしてもよく、又は分類を即座に計算しても良い。
【0129】
説明される実施形態では、次の表1に示されているような40の分類が存在する。これらの分類は、処理されるマップデータ、マップに含まれる領域、又は他の関連するいかなる要因によっても異なり得る。
【表1】

【0130】
各道路区域が分類されると、分類ごとの平均速度が計算され(1102)、この場合は40の部類の平均速度が計算される。生成された分類ごとの平均は、分類ごとに1つの数字であり、このような平均を得るためには、各所定の時間ごとの速度を、本明細書に記載された任意の適切な平均値計算方法を用いて求める。当業者には、このステップが1回のみ行われればいいことが明らかであり、結果として生じる分類ごとの平均速度は、後に行われるギャップ埋め工程のために保たれる。
【0131】
しかし、この実施形態では、各分類の平均速度は、分類に含まれる全ての要素の、長さによって重み付けされた調和平均として計算されており、次のような計算式を用いる:
Vmean=L/Σli/Vi
ここで
Vmeanは、分類jの平均速度、
liは、線iの長さ、
Lは、分類jに含まれる全ての線の長さ合計、
Viは、線iの平均速度である。
【0132】
これらの平均速度が更に使われる前に、十分な品質のものであり、その分類の道路の平均速度を正確に表しているかをチェックする。道路の分類の所定の時間に含まれるサンプルが少な過ぎたり、又は平均の計算に用いられるサンプルのばらつきが激しい場合、品質は不十分であり得る。したがって、各平均値の品質に関するチェックが下記のように行われる(1104)。
【0133】
40の分類中のある1つの分類からの平均速度が、hit_number_min(本実施形態については、これは表2に示されている)より少ない数の区域に基づいている場合は、表3に示されているように、この平均値は異なる分類からの値で置き換えられる。説明される実施形態では、ヒット(hit)の最低限の数は10であるが、他の実施形態では異なる数を用い得る。
【0134】
所定の分類のquality_factor_abs及びquality_factor_relのいずれも図2に示された値以下でなければ、速度分類の平均値は図2に示されているように、割り当てられた置き換え分類の平均値によって置き換えられる。quality_factor_rel_minは、平均速度をヒットの数の平方根で除したものに対する%として表される、分類の相対的な標準偏差として与えられ、すなわちquality_factor_abs*100/mean_speedである。
【0135】
したがって、任意の分類の平均速度が使えるようになるまでパスしなければいけない3つの品質要素(Qquality_factor_abs_min, quality_factor_rel_min, hit_number_min)がある。品質要素をパスできない場合は、その平均速度は表3に従って置き換えられる。
【表2】
【表3】
【0136】
表2に示された値は例として示されており、他の実施形態では異なり得る。同様に、表3で用いられた置き換え値も、マップに含まれる領域、マップデータを生成した者などによって異なり得る。
【0137】
ある分類に含まれる任意の平均値が使えるようになる前に、品質チェックが行われる。これらのチェックをパスできない場合は、ギャップ埋め工程はその分類において失敗することとなる。これらの品質チェックは次のようなものである。
【0138】
分類の平均値は、次のように計算される最低限度のより高く、そして最高限度より低い値であり、min及びmaxは最低関数及び最高関数の擬似的なコードである。
Min_speed_threshold=max[max(min−lower_relative_devision*min/100、min−lower_absolute_devision),lower_limit]
Max_speed_threshold=min[min(mean+upper_relative_devision*mean/100,mean+upper_absolute_devision),upper_limit]
ここでmeanは、区域の適切な速度分類の平均速度である。他の値は表4に定義されている。
【0139】
ある区域に関連する速度がこれらの基準に合わない場合は、区域に関する速度が絶対的な速度制限に背かない限りその速度は平均速度に基づいてその閾値によって置き換えられ、そのような場合にはこの絶対的な速度制限をその区域の速度として用いる。
【表4】
当業者には、ここにおける計算は速度に関して行われており、時間に関して行われていないことが明らかであろう。
【0140】
したがって、ギャップ埋め工程が終わると、所定の40の分類中の1つの分類内の道路区域に基づいた平均速度が生成され得る。しかし、それでもギャップ埋め工程が失敗することもある(即ち、品質チェックをパスする平均値が生成されていない)。
【0141】
したがって、関連する速度データを持たない道路区域は、ギャップ埋め工程によって生成された平均速度データ(ただし、この平均値が品質チェックにパスすれば)が割り当てられる(1108)。
【0142】
ギャップ埋めが失敗すると、ステップ1004において、その道路区域に関連する速度は、Functional Road Class(FRC)に従ってマップデータ供給者から供給される速度に指定される。FRCは例えば大まかに8つの分類を含み得る(この数はマップデータ供給者によって異なり得る)。即ち、自由流れ速度はFRCによる値に設定され、クラスタによって生成される速度プロファイルは、この実施形態では、プロファイル15番である。
【0143】
次に、ある道路区域に関連する速度プロファイル(測定された速度プロファイル又はギャップ埋めによって挿入された平均値)は、PNDのようなナビゲーション装置で使用できるようなマップデータを生成するために、クラスタ化によって生成された1つの速度プロファイルに割り当てられる 。これは、速度プロファイルが測定された速度プロファイルであっても、クラスタ化によって生成された平らな速度プロファイル15番を考慮した平均であっても、行い得る。
【0144】
ステップ1210では、最小二乗分析を用いて、クラスタ化によって生成された速度プロファイルのセット内のそれぞれ速度プロファイルに対して、得られた速度プロファイルが比較される。これらの16の比較が行われた後、16個のセットのうちのどの速度プロファイルが、該道路区域に関連する速度プロファイルに最も近いのかを判断できるようになり、ステップ1220では最も近いと判断された、クラスタ化によって生成された速度プロファイルへの参照が、その道路区域ついてのマップデータに保存される。該道路区域に関連して保存されるマップデータは、その道路区域の自由流れ速度であり、以前に計算されたものである。
【0145】
したがって、上記の参照及び自由流れ速度を用いて、各道路区域の平均速度に関する情報をマップデータ内に保存できる。交通量が多い区域は、平均速度情報は9AMから5PMまでの1時間ごとの平均に関する近似値を含むと考えることができる。交通量が少ない区域は、平均速度情報は全ての時間にわたって平均された平均速度と考えることができる。
【0146】
この工程は、マップ上の各道路速度に、クラスタ化によって生成された16の速度プロファイルのうちの1つが関連付けられるまで繰り返される(1230)。
【0147】
マップデータが公開される前に、(測定値の代わりに挿入された平均値ではなく、)測定された速度プロファイルが関連付けられた道路区域の数が十分であるか最終チェックを行う。
【0148】
この最終チェックでは、各機能的道路分類(ファンクショナル・ロード・クラス:FRC)についての道路区域の全長が計算される。下記の表5に示されているように、FRCは表2に示された40の分類に関連している。各FRC内において平均速度データを持つ道路区域の長さは、図5に示されているように、FRC内の道路全長の所定の割合(限度)以上でなければならない。
【表5】
【0149】
ルーティング動作に一般的により大きい影響を及ぼす道路分類は、より高い割合の最低カバレージが必要となることがわかるようになるだろう。例えば、FRC0(高速道路)は経路計画に大きい影響を及ぼすため60%を有することが必要になるが、例えば二次道路は30%の包含率が必要となっている。
【0150】
他の実施形態では、更なる代替作戦が提供され得る。そのような実施形態においては、第1の代替作戦が(測定された速度プロファイルが受け入れられないと判断された場合)、測定された速度プロファイルを夫々の日に用いることの代わりに、各日の所定の時間に関する速度プロファイルを合計し、結果として生じる合計速度プロファイルを各日に用いるものであり得る。したがって、そのような実施形態では、月曜日から金曜日までの同じ時間帯の期間を合計して週ごとの速度プロファイルが生成され、週末の速度プロファイルは土曜日及び日曜日の同じ時間帯の期間を合計することで生成される。週末の交通の流れは平日の交通の流れと異なり得ることが明らかであろう。
【0151】
そのように合計された速度プロファイルは、他の代替作戦を用いる前に、品質の要件を満たしているかがチェックされる。これらのチェックは、測定された速度プロファイルを評価するために用いられる要件と同じもの、又は少なくとも似たもので行われ得る。データの合計を行うことによってデータの品質が改善され、平日及び週末の両方が品質チェックをパスした場合、その速度プロファイルはその道路区域に用いられる。
【0152】
当業者には、ここに説明される方法を実行するために提供される装置はハードウェア、ソフトウェア、ファームウェア又はこれらの2つ以上の組み合わせであり得ることが明らかであろう。
【0153】
当業者には、図1を用いて説明されたようにGPSから得られる位置決定データを参照するためにGPSデータという用語を用いているが、他の位置決定データもここに説明された方法に似たような方法で処理できることが明らかであろう。したがって、GPSデータという用語は「位置決定データ」で置き換えが可能であり得る。そのような位置情報は、例えば移動電話の作動、料金所で受信したデータ、道路に埋め込まれた誘導ループシステムから得られるデータ、乗り物のナンバープレート認識システムから得られるデータ、又は他の適切なデータから抽出することができる。
【技術分野】
【0001】
本発明は、ナビゲーション装置に用いられるマップデータ、特に携帯ナビゲーション装置(Portable Navigation Device,PND)に用いられるマップデータ、を生成するために位置決定データを処理する方法に関するものである。本発明は、該方法を提供するための、関連する装置も提供する。
【背景技術】
【0002】
トムトムインタナショナルBVのGO(登録商標)のようなGPS技術に基づく電子ナビゲーション装置のためのマップデータは、テレアトラスNV(Tele Atlas NV)のような専門的なマップ販売社から来ている。このような装置はPNDとも呼ばれている。マップデータは経路案内のアルゴリズムによって使用されるように特別にデザインされており、一般的にGPSシステムからの位置決定データを使用する。例えば、道路は線、即ちベクトル(例:道路の始点、終点、及び方向。道路の全長は、夫々始点/終点方向のパラメータで独特に定められた、数百の区域で構成される)で表現することができる。したがって、マップはそのような複数の道路ベクトル、夫々のベクトルに関連付けられたデータ(制限速度、移動方向など)、関心のある場所 (Point of Interest, POI)、道路名、並びに公園の境界、川の境界など、全てベクトルで定義された地理的特徴のセットである。マップに含まれる全ての内容(例:道路ベクトル、POIなど)は、GPSの座標系と一致または関連する座標系を用いて定義されており、GPSで決定された装置の位置を、マップに表示される道路に正しく位置付けることを可能にし、目的地までの最適な経路を計画することを可能にする。
【0003】
テレアトラスはこのマップデータベースを作る作業を、イギリスのオーディナンス・サーベイなどの様々な情報源から得られる基本道路情報から始める。また、データの更新及び確認のための、多数の車両と他のマップ及び航空写真を調べる職員を持っている。このデータはテレアトラスのマップデータベースの中核 となる。このマップデータベースは地理的に関連付けられたデータを用いて継続的に改善されている。そして、データベースはその内容が確認され、トムトムのようなデバイス製造会社に年に4回公開される。
【0004】
夫々の道路区域は、速度データが関連付けられており、該速度に関するパラメータは、その区域においてどのような速度で移動できるかに関する目安を表し、例えばテレアトラスのようなマップデータを生成したものの平均速度である。速度データは、マップ処理を行うPNDの経路計画アルゴリズムによって利用される。したがって、このような経路計画の精度は速度他の精度に依存する。例えば、現在の装置の位置から目的地まで最も速い経路をPNDに生成させるという選択肢を、ユーザはよくPND上に提示される。速度データが正確でなければ、PNDによって計算された経路は最も速い経路でなくなり得る。
【発明の概要】
【発明が解決しようとする課題】
【0005】
道路区域の速度プロファイルは交通の密度などのパラメータによって影響されやすいため、そのような速度プロファイルにおけるばらつきは、2つの地点の間に存在する最も速い経路は継続的に同じ経路ではないことを意味する。道路区域の速度パラメータにおける誤りは、不正確な到着予定時刻(Estimated Time of Arrival, ETA)及び最も速くはない経路の 選択につながり得る。
【課題を解決するための手段】
【0006】
本発明の第1の実施形態によるとマップに含まれる領域内のナビゲーションできる経路の区域を表すナビゲーションできる、夫々関連付けられた速度データを持つ、複数の区域を含むマップデータを位置決定データから生成する方法であり、1つ以上のナビゲーション装置を用いて位置決定データを生成する工程と、前記位置決定データを処理して、前記位置決定データから速度データを生成する工程と、ナビゲーション装置による使用に適切なマップデータの生成が発生された、ナビゲーションできる区域に前記速度データを関連付けれられるために、前記マップデータを前記速度データでアップデートする工程と、
を含み、前記生成された速度データは、前記位置決定データによって前記速度データが生成された、ナビゲーションできる区域と関連付けられている、ことを特徴とする方法が提供される。
【0007】
そのような方法は、ナビゲーション装置が使用される時に得られた実際のデータを用いて速度データを生成するため、有利であると考えられる。したがって、このように得られた速度データは、速度データを生成する他の方法より正確であり得る。したがって、生成されたマップデータを用いるナビゲーション装置は、従来技術に比べ、より正確な経路を生成し得る。
【0008】
ナビゲーションできる区域は一般的に道路の区域を表すが、乗り物や人などによってナビゲーションできる他の通路、チャンネルなどの区域も表し得る。例えば、道、川、運河、サイクリングロード、運河、鉄道線路などの区域であり得る。したがって、交通は道路区域を移動する乗り物を意味することに限られるものではなく、ナビゲーションできる区域に沿った任意の動きに関連し得る。
【0009】
たとえば、交通はサイクリングロードを移動する自転車を意味し得る。
【0010】
ある実施形態では、該方法は1つ以上のナビゲーション装置の各々から位置決定データをサーバにアップロードする工程を含み、前記サーバは前記速度データを生成するために前記位置決定データを処理するように構成されている。そのような方法は、マップデータの集中生成を可能とする。
【0011】
しかし、他の代わりの実施形態又は追加的な実施形態では、該ナビゲーション装置は位置決定データを処理するように構成され得る。そのような実施形態は、該速度データをサーバにアップロードし得る。
【0012】
該方法は、複数の位置決定装置を用いて位置決定データを生成することを含み得、そのようにすることで位置決定データから得られた速度データの精度を上げる。
【0013】
該方法は、位置決定データ及び/又は速度データを、データが得られた後分析するために、サーバ及び/又はナビゲーション装置によって保存するようにさせ得る。そのような方法は、データの蓄積及びその後の処理を可能とするため、各ナビゲーションできる装置の速度データの精度を改善させ得る。したがって、ある特定の実施形態では、該方法は、1つ以上のナビゲーション装置の各々から位置決定データを、後の処理のために位置決定データを保存するサーバへ時々アップロードするようにさせる。
【0014】
該方法は、位置決定データを複数の軌跡に分ける工程を含み得、各軌跡は所定の期間にわたってナビゲーション装置から受信した位置決定データを表すものである。ある実施形態では、この所定の期間はおおよそ24時間であり得、この機関は暦日に対応し得る。
【0015】
位置決定データ(これは特に各軌跡を意味し得る)は、ナビゲーション装置の各移動を表す移動データを生成するために処理され得る。1つの移動は、ナビゲーション装置が所定の時間以上停止せずに動き続けた期間として思うことができる。位置決定データを移動データに分けることは、ナビゲーション装置が停止していた期間を排除することができるため、速度データの精度を上げることができ、有利であり得る。
【0016】
位置決定データは、不正確な位置を排除するために処理され得る。便利に、位置決定データは制度データを含み得る。不正確な位置は、位置決定データの処理に従って排除され得る。
【0017】
位置決定データは、そのデータ内の位置をナビゲーションできる区域に関連付けるために処理され得る。続いて、速度データは位置決定データお呼びその位置に関連付けられたナビゲーションできる区域から決定され得る。
【0018】
生成された速度データは複数の所定の期間のうち、ナビゲーションできる区域と関連付けられた1つに分類され得る。
【0019】
続いて、該方法は、各ナビゲーションできる区域の所定の期間の各々において速度を平均し得る。したがって、該方法は、測定された速度プロファイルを生成し得、各所定の期間は、測定された速度プロファイルにおいて1つの位置を提供し得る。これは、十分な位置決定データが存在する複数のナビゲーションできる区域(一般的には、各ナビゲーションできる区域)のために繰り返され得る。したがって、不十分なデータ、又は低質のデータは、測定された速度プロファイルが生成されていないことがあり得る。
【0020】
他の実施形態では、処理は他の期間を含む、測定された速度プロファイルを生成することを目的とし得る(即ち、第1の期間より長くあり得る第2の期間)。例えば、ある実施形態では、処理は平日に測定された速度プロファイル及び/又は週末に測定された速度プロファイルを生成することを目的とし得る。他の実施形態では、1つの測定された速度プロファイルを週全体のおいて用い得る。速度プロファイルの期間をより細かくすることで(例えば、1日)、実際の交通の流れに近い速度プロファイルが得られることは当業者には明らかであろう。しかし、期間を細かくすると、測定された速度プロファイルを生成するために必要なデータ量も増加することも明らかであろう。
【0021】
一般的に、1つ以上の位置決定装置の各々によって得られた位置決定データは、各位置が発生した時刻データも含む。他の実施形態では、位置決定装置は所定の時刻に位置決定データを取得し得、したがって、各位置が発生した時刻を記録しない。一般的に、時刻データ(位置決定データ内に記録されたもの、又は所定の時刻に取得されたもの)は、位置決定データから速度データを決定することを可能とする。
【0022】
該方法は、ナビゲーションできる区域に関連付けられた速度データを分析し、速度データの質を決定し得る。速度データの質が所定の限度以下である場合は、該方法は速度データを分類平均で置き換え得る。
【0023】
該所定の限度は、速度データを成すリーディングの絶対値、速度データの標準偏差、又は他の適切な数値で決定され得る。
【0024】
異なる実施形態では、測定された速度プロファイルの質が所定の限度以下である場合は、該方法は該ナビゲーションできる区域の測定された速度プロファイルを、より長い期間をカバする測定された速度プロファイルで置き換えるように構成され得る。例えば、該速度データは1日の期間をカバする、測定された速度プロファイルを含み得、該方法によってその速度プロファイルの質が不十分と判断されると、1週間の期間をカバする速度プロファイルで置き換えられ得る。そのような方法は、より多くのナビゲーション装置からのデータをもとに作られた、より長い期間の測定された速度プロファイルであり、より正確なプロファイルであり得るため、有利であると考えられる。
【0025】
該方法は、生成された速度プロファイルのクラスタを生成するために、測定された速度プロファイルにクラスタ分析を行う工程をさらに含み得る。
【0026】
前記少なくともいくつかのナビゲーションできる区域、一般的には各ナビゲーションできる区域に関連付けられた速度データは、前記クラスタ生成された区域を参照して置き換えられる。そのような行程は、マップデータ内に速度データを保存するためのデータ量を減らし得る。
【0027】
ある実施形態では、クラスタ生成された速度プロファイルはパラメータに従って正規化され得る。そのような方法は、クラスタ生成された速度プロファイルがより多くの測定された速度プロファイルにマップされるようにし得る。
【0028】
該方法は、ナビゲーション装置でない情報源からの位置決定データを用いることを含み得る。例えば、該方法は、携帯電話操作から由来する位置情報、料金徴収所から受信したデータ、道路またはほかのナビゲーションできる経路に埋め込まれた誘導ループから得られたデータ、ナンバープレート認識システムから得られたデータのいずれかの情報源から生成されたデータを含み得る。
【0029】
該方法は、1つ以上(一般的には複数)のナビゲーション装置にマップデータをダウンロードする工程を含み得る。
【0030】
本発明の第2の実施形態によると、機械可読な命令を記録するデータ記憶媒体であって、命令が機械によって読み込まれると第1の実施形態の方法を機械に実行させることを特徴とする記憶媒体が提供される。
【0031】
本発明の第3の実施形態によると、マップに含まれる領域内のナビゲーションできる経路の区域を表すナビゲーションできる複数の区域を含むマップデータを処理するシステムであって、少なくとも1つ(一般的には複数)のナビゲーション装置から位置決定データを受信するように構成された受信機と、前記位置決定データを処理し、前記位置決定データから速度データを生成するように構成された処理回路と、を含み、前記生成された速度データは、前記位置決定データによって前記速度データが生成された、ナビゲーションできる区域と関連付けられていおり、前記処理回路はさらに、ナビゲーション装置による使用に適切なマップデータの生成が発生された、ナビゲーションできる区域に前記速度データを関連付けれられるために、前記マップデータを前記速度データでアップデートするように構成されていることを特徴とする、システムが提供される。
【0032】
該システムはサーバによって提供され得る。代わりに、該システムはお互いに関連付けられた部品のセットによって提供され得る。
【0033】
本発明の第4の実施形態によると、機械可読な命令を記録するデータ記憶媒体であって、命令が機械によって読み込まれると、該機会を第3の実施形態のシステムとして機能させることを特徴とする記憶媒体が提供される。
【0034】
本発明の第5の実施形態によると、メモリ、を含む処理回路を備えるナビゲーション装置であって、前記装置のユーザを誘導する経路の指示のセットを生成するために、前記メモリに保持されたマップデータを処理し、前記装置によって生成された位置決定データを前記メモリ内に保存し、前記ナビゲーション装置から遠隔であるサーバへ前記位置決定データをアップロードするように構成された装置が提供される。
【0035】
本発明の第6の実施形態によると、命令を含む、機械可読な記憶媒体であって、機械によって読み込まれると前記機械を第5の実施形態のナビゲーション装置として機能させる媒体が提供される。。
【0036】
本発明の上記実施形態のいずれにおいても、機械可読な記憶媒体は下記の媒体のいずれかを含み得る:フロッピディスク、CD−ROM、DVD−ROM/RAM(−R/−RW及び+R/+RWを含む)、ハードディスク、メモリ(USBメモリキー、SDカード、メモリスティック(登録商標)、コンパクトフラッシュ(登録商標)カード、又は同様のもの)、テープ、他の光磁気記憶媒体、送信された信号(インターネットのダウンロード、FTPトランスファなどを含む)、ワイヤ、又は他の適切な媒体。
【図面の簡単な説明】
【0037】
【図1】ナビゲーション装置によって利用できるGPSシステムの例を概略的に示す図である。
【図2】ナビゲーション装置とサーバとの間における通信のための通信システムの概略図である。
【図3】図2のナビゲーション装置または他の適切なナビゲーション装置の電子構成要素の概略図である。
【図4】ナビゲーション装置の取り付け及び/又はドッキングの配置を示す概略図である。
【図5】図3のナビゲーション装置に使われる構成スタックの概略図である。
【図6】A trace内のGPSの定置とマップとを関連付ける実施形態を概説するフローチャートである。
【図7】平均値を求めるための実施形態を概説するフローチャートである。
【図8】平均値について クラスタ形成を実行するための実施形態を概説するフローチャートである。
【図9】クラスタによって生成され、クラスタリング・アルゴリズムの出力である速度プロファイルのセットの一例を示す図である。
【図10】道路の区域に関連付けられた、測定された速度プロファイルの質を改善させるために用いられるfallback strategyを概説するフローチャートである。
【図11】測定された速度プロファイルデータの質がどのように改善されたかを概説するフローチャートである。
【図12】クラスタによって生成された速度プロファイルが、少なくとも1つのマップの道路区域とどのように関連付けられるかを概説するフローチャートである。
【発明を実施するための形態】
【0038】
下記の説明全体を通して、類似の要素には同じ参照番号が使用される。
【0039】
本発明の実施形態は、PNDに関連付けられた形で説明される。しかし、本発明はPNDに限定されるものではなく、ルートプランニング 及びナビゲーション機能を提供するようにナビゲーションソフトウェアを携帯形式で実行するように構成された任意の制御演算装置に普遍的に適用できることは明らかである。したがって、本発明によるナビゲーション装置は任意の(限定されることなく)経路計画及びナビゲーション装置も含むべきであり、PND、自動車のような乗り物、又は経路計画及びナビゲーションソフトウェアを実行する携帯用PC,移動電話、又はパーソナル・デジタル・アシスタント(PDA)などのような携帯コンピューティング資源など、任意の実施形態でもよい。
【0040】
さらに、本発明の実施得形態は道路区域に関連付けて説明されている。しかし、本発明は道、川、運河、サイクリングロード、運河、鉄道線路などの区域のような、ナビゲーションの対象となり得る区域に適用できることは明らかである。これらの区域は、参照の簡略化のため道路区域として一般的に参照される。
【0041】
ある地点からもう1つの地点までをナビゲートするためでなく、単純にある場所の視覚的情報がほしい場合などでも本発明が用いられることは下記の説明によって明らかになる。そのような場合は、ユーザによって選択された「目的地」は、対応する出発点ではなくてもよく、したがってそのような場合は「目的地」の位置または「目的地」の視覚的情報を参照することは、経路の生成や「目的地」への移動が必要であることを意味することではない。また、目的地が存在することは、対応する出発点の指定が必要であることを意味することではない。
【0042】
上記のことを念頭において、図1のGPS及び類似するものは様々な目的に用いられる。一般的に、GPSは衛星ラジオに基づいたナビゲーションシステムであり、連続的な位置、速度、時間、及び場合によっては制限されない数のユーザの道案内情報を決定することが可能である。以前はNAVSTARという名前で知られていたGPSは、非常に正確な軌道で地球周りを回っている複数の人工衛星を含む。これらの正確な軌道に基づいて、GPS人工衛星は自らの位置をGPSデータとして任意の数の受信ユニットにでも中継することができる。しかし、GLONASS,European Galileo positioning system, Compass positioning system,またはIRNSS(Indian Regional Navigational Satellite System)などのGPSシステムが使われ得ることは理解されるべきである。
【0043】
GPSシステムは、GPSデータを受信するように装備された装置がGPS人工衛星の信号を探してラジオ周波数をスキャンし始めると実施される。GPS人工衛星からラジオ信号を受信すると、装置は複数の周知方法の1つの方法で該人工衛星の正確な位置を決定する。装置はほとんどの場合、3つ以上の異なる人工衛星の信号を得るまでラジオ信号のスキャンを続ける(他の三角測量方法を用いると、位置は2つの信号でも決定することができるが、一般的には行われない)。幾何学的な三角測量を実行する際には、受信機は3つの既知の位置を用いて、人工衛星に対する自らの2次元位置を決定する。これは周知の方法で可能である。更に、4つ目の人工衛星の信号を得ると、同じ幾何学的な計算を用いて周知の方法で受信機の3次元の位置を計算することが可能となる。位置及び速度データは制限されていない数のユーザによってリアルタイムで継続的に更新できる。
【0044】
図1に示されているように、GPSシステム100は地球の周りを回る複数の人工衛星102を備える。GPS受信機106はスペクトラム拡散GPS衛星データ信号108をデータとして複数の人工衛星102から受信する。スペクトラム拡散データ信号108は各人工衛星102から継続的に発信され、発信された夫々のスペクトラム拡散データ信号108はデータストリームと該データストリームが由来する特定の人工衛星102が識別できる情報とを含む。一般的にGPS受信機106は、2次元の位置を計算するために少なくとも3つの人工衛星102から来るスペクトラム拡散データ信号108を必要とする。4つ目のスペクトラム拡散データ信号を受信すると、GPS106は周知方法を用いて3次元の位置を計算することが可能になる。
【0045】
図2に示された,GPS受信機106を備える、又はGPS受信機106につながっているナビゲーション装置200(即ち、PND)は、移動電話、PDA及び/又は移動電話機能を持つ任意の装置のようなモバイルデバイス(不図示)を介して、「モバイル」または電気通信ネットワークのネットワークハードウェアとのデータセッションを成立させることが必要に応じて可能であり、例えばブルートゥース技術を用いたデジタル接続のようなデジタル接続を成立させる。その後、携帯装置はネットワークプロバイダを介して(例えばインターネットを介して)サーバ150とネットワーク接続を成立させることができる。したがって、“モバイル”ネットワーク接続はナビゲーション装置200(この装置は単独で及び/又は車両の中で移動するため「モバイル」であり得、多くの場合モバイルである)とサーバ150との間で成立でき、「リアルタイム」または少なくとも「最新」である情報のゲートウェイを提供する。
【0046】
モバイル装置と、サーバ150のような異なる装置との間に(サービスプロバイダを介して)例えばインターネットを用いてネットワーク接続を成立させることは周知の方法で実行することができる。この点において、任意の数の適切なデータ通信プロトコール(例えばTCP/IPレイヤード・プロトコール)も用いることができる。更に、モバイル装置はCDMA2000,IEEE802.11,a/b/c/g/nなどの任意の数の通信スタンダードも用いることができる。
【0047】
したがって、インターネット接続が用いられることが理解でき、該インターネット接続は、例えばデータ接続、ナビゲーション装置200に内在する移動電話または移動電話機能を介して得られる。
【0048】
図示されていないが、ナビゲーション装置200はもちろん移動電話機能を内蔵し得る(例えばアンテナを含むか、又は任意的にナビゲーション装置200の内部アンテナを使用することを含む)。ナビゲーション装置200に内蔵された移動電話機能は内部の部品及び/又は挿入式カード(例えば、加入者識別モジュール(SIM)カード)を含み得、必要な移動電話機能及び/又はアンテナなどを含む。したがって、ナビゲーション装置200に内蔵された移動電話機能はナビゲーション装置200とサーバ150との間で、他の移動装置と同様にネットワーク接続を成立させることができる。
【0049】
電話の設定には、常に変化する携帯電話のモデル、メーカなどと正しく対応できるようにブルートゥース対応のナビゲーション装置を使い得、また、例えばモデル/メーカごとの具体的な設定をナビゲーション装置側に保存して置くことが可能である。この情報のために保存されたデータは更新することができる。
【0050】
図2には、ナビゲーション装置200が一般的な(generic)通信チャンネル152を介してサーバ150とつながっている様子が示されており、該チャンネル152は数多くの異なる構成のどれを用いても実施できる。通信チャンネル152は一般的にナビゲーション装置200とサーバ150とをつなげる、伝播媒体またはパス(Path)を表す。サーバ150及びナビゲーション装置200は、その間に通信チャンネル152が成立されたとき通信が可能になる(そのような接続はモバイル装置を介するデータ接続、パソコンでインターネットを介する直接接続などであり得る)。
【0051】
通信チャンネル152は特定の通信技術に限定されるものではない。更に、通信チャンネル152は1つの通信技術に限定されるものではない。つまり、チャンネル152は様々な技術を用いる複数の通信リンクを含み得る。例えば、通信チャンネル152は電気的、光学的、及び/又は電磁気的な通信などのための通路を提供するように構成され得る。したがって、通信チャンネル152は以下のもの及びその組み合わせを含むが、これらに限定されるものではない:電気回路、ワイヤ及び同軸ケーブルなどの導電体、光ファイバ・ケーブル、変換器、無線周波数(RF) 、大気、空間など。更に、通信チャンネル152はルータ、リピータ、バッファ、送信機、受信機などの中間装置を含み得る。
【0052】
1つの例示的な構成では、通信チャンネル152は電話及びコンピュータネットワークを含む。更に、通信チャンネル152は、赤外線通信、マイクロ波周波数通信のような無線周波数通信などのワイヤレス通信を提供し得る。更に、通信チャンネル152は、人工衛星通信も可能である。
【0053】
通信チャンネル152を介して発信される通信信号には、ある通信技術に必要又は好ましい信号を含むが、これらに限定されない。例えば、信号は時分割多元接続(TDMA)、周波数分割多元接続(FDMA)、符号分割多元接続(CDMA)、グローバル・システム・フォー・モバイル・コミュニケーションズ(GSM)、汎用パケット無線システム(GPRS)などの移動体通信技術を用いるように構成され得る。デジタル及びアナログの両方の信号が通信チャンネル152を介して送信され得る。これらの信号は通信技術に応じて調節、暗号化、及び/又は圧縮された信号であり得る。
【0054】
サーバ150は、図示されていない要素に加えて、メモリ156に接続され、さらに有線又は無線接続158によって大量データ保存装置160に動作可能なように接続された、プロセッサ154を備える。大量データ保存装置160にはナビゲーションデータ及びマップ情報が保存されており、サーバ150とは別個の装置であり得、又はサーバ150の中に含まれ得る。プロセッサ154はさらに送信機162及び受信機164に動作可能なように接続されており、情報を通信チャンネル152を介してナビゲーション装置200との送受信を行う。送受信された信号はデータ、通信、及び/又は他の伝播された信号であり得る。送信機162及び受信機164は、ナビゲーションシステム200の通信構成に使用された通信要件及び通信技術に応じて選択または設計され得る。更に、送信機162及び受信機164の機能は、1つの送受信機に合体され得る。
【0055】
上記のように、ナビゲーション装置200は、通信チャンネル152を介してサーバとの通信が可能であり、通信チャンネル152を介して送信機166及び受信機168を用いて信号及び/又はデータを送受信する。これらの装置はサーバ150以外の装置との通信にも用いられ得る。更に、送信機166及び受信機168は、ナビゲーションシステム200の通信構成に使用された通信要件及び通信技術に応じて選択または設計され、送信機166及び受信機168の機能は図2に関連付けて上記に説明されているように1つの送受信機に合体され得る。もちろん、ナビゲーション装置200は他のハードウェア及び/又は機能的部品を備えており、これらは後で詳細に説明される。
【0056】
サーバメモリ156に保存されたソフトウェアはプロセッサ154に命令を提供し、サーバ150がナビゲーション装置200にサービスを提供できるようにする。サーバ150によって提供される1つのサービスは、ナビゲーション装置200からのリクエストを処理することと、ナビゲーションデータを大量データ保存装置160からナビゲーション装置200に送信することとを含む。サーバ150によって提供できるもう1つのサービスは、希望されるアプリケーションのために様々なアルゴリズムを用いてナビゲーションデータを処理することと、これらの計算の結果をナビゲーション装置200に送信することとを含む。
【0057】
サーバ150は、ナビゲーション装置200が無線チャンネルを介してアクセスできる遠隔のデータ・ソースである。サーバ150は、ローカルエリア・ネットワーク(LAN),広域ネットワーク(WAN),仮想プライベート・ネットワーク(VPN)などに含まれるネットワークサーバを含み得る。
【0058】
サーバ150はデスクトップまたはノートブックのようなパソコンを含み得、通信チャンネル152はパソコンとナビゲーション装置200とを接続させるケーブルであり得る。代わりに、パソコンをナビゲーション装置200とサーバ150との間において接続させ、サーバ150とナビゲーション装置200との間にインターネット接続を成立させるようにし得る。
【0059】
ナビゲーション装置200には情報ダウンロードを介してサーバ150から情報が提供され得、該情報は時々またはユーザがナビゲーション装置200をサーバに接続させた際、自動的に更新され得、及び/又は無線移動接続装置及びTCP/IP接続などを介して、サーバ150とナビゲーション装置200との間でより継続的で頻繁に接続が成立される場合はよりダイナミックに更新され得る。多くの計算を処理するためには、サーバ150にあるプロセッサ154を用いてその大半を処理することができるが、ナビゲーション装置200のプロセッサ(不図示)も大量の処理や計算を行うことができ、多くの場合はサーバ150への接続と関係なくそのような作業が可能である。
図3を参照すると、ナビゲーション装置200のブロック図はナビゲーション装置200の全ての構成要素が含まれているのではなく、いくつかの例示的な部品を示していることが明らかである。ナビゲーション装置200はハウジングの中に配置されている(不図示)。ナビゲーション装置200は、例えば上記のプロセッサ202を備える処理回路を含み、プロセッサ200は入力装置204及び表示画面206のような表示装置に連結されている。入力装置204の数はいくつでもよく、キーボード装置、音声入力装置、タッチパネル及び/又は他の周知の情報入力装置を含み得る。同様に、表示画面206は任意の表示画面であり得、例えば液晶表示(LCD)などを含み得る。
【0060】
ある構成では、入力装置204と表示画面206が、タッチパネルのような入力兼表示装置として一体化されており、一体化された入力兼表示装置は情報の入力(直接入力、メニュー選択など)及び情報の表示の両方を可能にするタッチパッドまたはタッチ画面入力250を含み、これによってユーザは常時画面206の一部をタッチすることだけで、表示された複数の選択肢の1つを選択したり、複数のバーチュアル或いは“ソフト”ボタンを押すことが可能となる。これに関しては、プロセッサ202は、タッチスクリーンとともに作動するグラフィカル・ユーザー・インターフェース(GUI)を支持する。
【0061】
ナビゲーション装置200において、プロセッサ202は接続210を介して入力装置204に動作可能なように接続され、入力装置204からの入力情報を受信することができ、さらには少なくとも1つの表示画面206及び出力装置208に夫々の出力接続212を介して情報を出力するように接続されている。ナビゲーション装置200は、例えば音声出力装置(例えばスピーカ)などの出力装置208を備え得る。出力装置208は、ナビゲーション装置200のユーザに音声情報を生成できるように、入力装置204も同様にマイク及び音声入力指示を受け取るソフトウェアを含むことができる。更に、ナビゲーション装置200は追加的な入力装置204及び/又は出力装置を備え得、例えば音声入力/出力装置を備え得る。
【0062】
プロセッサ202は接続216を介してメモリ214に動作可能なように接続されており、接続220を介して入力/出力(I/O)ポート218と情報を送受信できるように構成されており、I/Oポート218はナビゲーション装置200の外部装置であるI/O装置222に接続可能である。外部I/O装置222は、イヤピースのような外部聴取装置を含み得るが、これに限定されない。I/O装置222への接続は有線又は無線を介する任意の外部装置への接続であり得、例えばハンズフリー操作及び/又は音声作動を可能にするカーステレオユニットへの接続、イヤピースやヘッドフォンへの接続、及び/又は携帯電話への接続などがあり、携帯電話への接続はナビゲーション装置200とインターネット又は他の任意のネットワークとの接続を成立させるために用いられ、及び/又はインターネットまたは他のネットワークを介してサーバへの接続を成立させるために用いられ得る。
【0063】
ナビゲーション装置200のメモリ214は不揮発性メモリ(例えばプログラムコードを保存するため)の一部、及び揮発性メモリ(例えばプログラムコードが実行されるとデータを保存するため)の一部を備える。ナビゲーション装置は更にポート228を備え、ポート228は接続230を介してプロセッサ202と通信し、取り外し可能なメモリカード(一般的にカードと呼ばれる)が装置200に入れられるようにする。説明される実施形態では、ポートにはSD(Secure Digital)カードが加えられるように構成されている。他の実施形態では、ポートは異なる形式のメモリ(例えばコンパクトフラッシュ(登録商標)(CF)カード、メモリスティック(登録商標)、xDメモリカード、USB(Universal Serial Bus)フラッシュドライブ、MMC(マルチメディア)カード、スマートメディアカード、マイクロドライブ等)が接続できるようにし得る。
【0064】
図3は、接続226を介する、プロセッサ202とアンテナ/受信機224との間の動作可能接続をさらに示しており、アンテナ/受信機224は例えばGPSアンテナ/受信機であり得、したがって図1のGPS受信機のように機能する。参照番号224で指定されたアンテナ及び受信機は、説明のために概略的に1つとしてあらわしているが、アンテナ及び受信機は異なる位置に配置される部品であり得、アンテナは例えばGPSパッチアンテナ又はらせん状のアンテナであり得る。
【0065】
当業者であれば、図3に示された電子部品は1つ以上の電源(不図示)によって従来のように電力が供給されることは明らかである。そのような電源は内部電池及び/又は低電圧直流(DC)電源の入力または他の任意の 適切な構成をも含み得る。当業者には明らかであるように、図3に示された部品の異なる配置も考えられる。例えば、図3に示された部品は、有線及び/又は無線の通信及びそのようなものによってお互いに通信し得る。したがって、ここに説明されるナビゲーション装置200は携帯又はハンドヘルドのナビゲーション装置200であり得る。
【0066】
さらに、図3の携帯又はハンドヘルド・ナビゲーション装置200は、周知の様式で自転車、オートバイ、車、又はボートのような乗り物につなげる、又は「ドッキング」させることができる。そのようなナビゲーション装置200は、携帯又はハンドヘルド使用のためドッキング位置から取り外すことができる。異なる実施形態では、ユーザのナビゲーションを可能にするために、装置200はハンドヘルド装置として構成され得る。
【0067】
図4を参照すると、ナビゲーション装置200は、一体化された入力兼表示装置206及び図2に示されたほかの部品(内部GPS受信機224、プロセッサ202、電源(不図示)、メモリシステム214などを含むが、これらに限定されない)を含む1つのユニットであり得る。
【0068】
ナビゲーション装置200は、アーム252に固定され得、アーム252は乗り物のダッシュボード/窓などに吸着カップ254を用いて固定され得る。このアーム252は、ナビゲーション装置200がドッキングされ得るドッキング・ステーションの一例である。ナビゲーション装置200は、例えばアーム252にカチッとはまるような結合でドッキング又は結合され得る。すると、ナビゲーション装置200はアーム252に対して回転可能になり得る。ナビゲーション装置200とドッキング・ステーションとの結合を分離させるためには、例えば、ナビゲーション装置200のボタンを押すことで外れるようにし得る。ナビゲーション装置200とドッキング・ステーションとの結合及び分離に適している構成は、当業者には周知である。
【0069】
図5を参照すると、プロセッサ202及びメモリ214はお互いに協力して、ナビゲーション装置200の機能的ハードウェア部品280と、装置によって実行されるソフトウェアとの間のインタフェースとして機能するBIOS(Basic Input/Output System)を支持する。次に、プロセッサ202はメモリ214からオペレーティング・システム284をロードし、(既述したルート計画機能及びナビゲーション機能のいくつか又は全てを実行する)アプリケーションソフト286が実行できるような環境を整える。アプリケーションソフト286は、マップの表示、ルート計画、ナビゲーション機能及び他の関連する機能などのナビゲーション装置の中心的な機能をサポートするGUIを含む、操作環境を提供する。この点において、アプリケーションソフト286の一部はビュー生成モジュール288を備える。
【0070】
説明されている実施形態では、ナビゲーション装置のプロセッサ202は、アンテナによって受信されたGPSデータを受信するように、そして時々そのGPSデータをその受信時のタイムスタンプと共にメモリ214保存し、ナビゲーション装置の位置記録を蓄積するように、プログラムされている。そのように保存されたデータ記録はGPSの測定位置と考えられ得る。即ち、ナビゲーション装置の位置の測定位置であり、緯度、経度、タイムスタンプ、及び精度レポートを備える。
【0071】
ある実施形態では、データは実質的には定期的に保存され、例えば5秒ごとに保存され得る。当業者には他の間隔を用いることが可能であることが明らかであり、データの分解能とメモリの容量のバランスがあることが明らかである(即ち、データをより多くとることでデータ分解能は上がるが、そのデータを保存するためにより大きいメモリ容量が必要となる)。しかし、異なる実施形態では、データの分解能は実質的に1秒ごと、10秒ごと、15秒ごと20秒ごと、30秒ごと、45秒ごと、1分ごと、2,5分ごと(または、これらの間の任意の間隔)であり得る。したがって、装置のメモリには、様々な時点における装置200の位置に関する記録が蓄積されている。
【0072】
ある実施形態では、間隔が長くなると、得られるデータの質が低下することがあり得、低下の程度はナビゲーション装置200の移動速度にもよるが、間隔の時間として15秒が、適切な上限となり得る。
【0073】
ナビゲーション装置200は一般的に自らの位置に関する記録を蓄積するように構成されているが、ある実施形態では移動の開始時又は終了時においてデータの記録を所定の期間行わない。そのような構成を用いることで、ユーザの家屋及びユーザが頻繁に訪れる場所などを保護することが可能となり、ナビゲーション装置200のユーザのプライバシーを守ることができる。例えば、ナビゲーション装置200は移動開始から約5分又は約1マイル(1.6km)に関するデータを保存しないように構成され得る。
【0074】
異なる実施形態では、GPSは定期的に保存される訳ではなく、所定のイベントが発生するとメモリに保存されるように構成され得る。例えば、プロセッサ202は、道路の分岐点、道路区域の変更、又はそのようなイベントが発生するとGPSデータを保存するようにプログラムされ得る。
【0075】
さらに、プロセッサ202は、時々装置200の位置に関する記録(即ち、GPSデータ及びタイムスタンプ)をサーバ150にアップロードするように構成されている。ナビゲーション装置200が常在又はほぼ常在する通信チャンネル152を持つような実施形態では、通信チャンネル152によるサーバ150への接続及びデータのアップロードは定期的に行われ、例えば24時間ごとに行われ得る。当業者には、他の間隔を用いることも可能であることが明らかであり、その間隔は15分、30分、1時間、2時間、5時間、12時間、2日、1週間、又はこれらの間の任意の間隔であっても良い。そのような実施形態においては、プロセッサ202は、位置の記録を実質的にリアルタイムでアップロードするように構成され得、このような構成はデータ送信の間隔が短くなることを意味し、疑似リアルタイムと考えることがより正しい。そのような疑似リアルタイム実施形態では、ナビゲーション装置はメモリ214内、又はポート228に挿入されたカード内にGPS測定位置をバッファできるように構成され得、又、所定の数の測定位置が保存されるとこれらを送信するように構成され得る。この所定の数は20、36、100、200程度、又はそれらの間の任意の数でもあり得る。当業者には、この所定の数はメモリ214/ポート228のカードの容量にある程度支配されることが明らかである。
【0076】
常在する通信チャンネル152を持たない異なる実施形態では、プロセッサ202は、通信チャンネル152が作られるとサーバ150に記録をアップロードするように構成され得る。通信チャンネル152が作られることは、例えばナビゲーション装置200がユーザのコンピュータに接続される時などである。このような実施形態でも、ナビゲーション装置200はメモリ214内、又はポート228に挿入されたカード内においてGPS測定位置をバッファできるように構成され得る。メモリ214又はポート228に挿入されたカードがGPS測定位置 で満たされた場合はナビゲーション装置は最古のGPS測定位置を削除するように構成され得、したがって先入れ先出し(FIFO)バッファであると考えられる。
【0077】
説明される実施形態では、位置の記録は1つ以上の軌跡を含み、夫々の軌跡は24時間の期間内のナビゲーション装置200の移動を表す。それぞれの24時間の期間は暦日と一致するように構成されているが、必ずしもこのようにする必要はない。
【0078】
一般的に、ナビゲーション装置200のユーザは、装置の位置に関する記憶がサーバ150にアップロードされることに対して承認する。承認が得られなかった場合は、記録はサーバにアップロードされない。ナビゲーション装置及び/又は装置が接続されたコンピュータは、位置記録の使用に関してユーザに承認を要請するように構成され得る。
【0079】
サーバ150は装置の位置記録を受信し、処理のため大量データ保存装置160に保存するように構成されている。したがって、ナビゲーション装置200がアップロードした、複数の装置の位置記録が、時間とともに大量データ保存装置160に蓄積される。
【0080】
上記のように、大量データ保存装置はマップデータも保存し得る。そのようなマップデータは、道路区域、注目すべき場所の位置など、マップに載っている一般的な情報を提供する。
【0081】
最初の工程として、サーバ150はマップデータと、受信した位置記録に含まれるGPS測定位置とのマップマッチング機能を行うように構成されており、そのような工程は、図6に関連付けて説明されている。そのようなマップマッチングは、位置記録は受信されているため、いわゆるリアルタイムで行われてもよく、又は大量データ保存装置160から位置記録が再び読み込まれた際に行っても良い。
【0082】
マップマッチングの精度を改善させるために、下記のように位置記録の前処理を行う。各GPS軌跡(即ち、24時間分のGPSデータ)は1つ以上の移動に分けられ(600)、各移動はナビゲーション装置200の1つの移動であり、後の処理のために保存されたものを表す。
【0083】
各移動において、ナビゲーション装置から受信したGPS測定位置の中で精度に関するレポートが十分に高くないものは拒絶される。したがって、ある実施形態では、ある測定位置に関して3つ未満の人工衛星102からのシグナルしかナビゲーション装置200に受信できていない場合は、その測定位置は拒絶され得る。更に、各移動は、2つの測定位置間の報告された時間がある限界の値を超えると区切られる(604)。この前処理工程を通った各移動はマップマッチングの方に通される。
【0084】
これに関連して、区切られた移動は、連続したGPS測定位置の間に、所定の時間よりも大きい所定の時間間隔が存在する移動である。 したがって、乗り物が停止したことが推論でき、最初の移動が終わり、2番目の移動が始まったと考えるべきである。したがって、区切られた移動は、2つの別個の移動となる。
【0085】
しかし、GPSの信号が届かなかったことが原因でGPS定位の間にギャップが生じることもあり得るため、1つの移動を区切る前に、乗り物の位置が変わったかをチェックする。そして、そのような状況である場合は移動を区切ることは行わない。説明される実施形態では、この所定の時間はおおよそ3分である。しかし、15秒、30秒、1分、90秒、2分、5分、10分、又はこれらの間の任意の時間など、他の任意の適切な時間が該所定の時間として用いられることは当業者には明らかである。ここに説明されるように、GPS測定位置を送信するナビゲーション装置200の平均速度がある所定の限度より低い場合、ある実施形態では、データは後の処理において拒絶され得る。そのような実施形態は、衝突などの事故後に発生し得る渋滞に関する情報を排除し、定常状態の交通の流れをより正確に表すデータを残すため、有用であり得る。
【0086】
次に、各移動を順に取り、その移動に含まれる定位をマップデータ内のマップにマッチングする。各マップは複数の道路区域を備えており、道路区域に沿って移動することが可能であり、各区域は直線のベクトルでマップ上に表わされている。
【0087】
サーバ150のプロセッサ154において実行されているプログラムコードは、ある区域の中に位置する測定位置、又はある区域内で発生したと考えても良いほど(即ち、該区域の距離限度内にある)その区域に十分に近い測定位置が見つかるまで処理中の測定位置から離れるように構成されたマップマッチング機能 を提供する。この限度を用いることで、100%以下のGPS精度を許し、道路を直線状のベクトルに分解して得られる圧縮効果を可能とする。
【0088】
各移動は最初の測定位置(即ち、移動における1番目の測定位置)を持っており、この最初の測定位置は、区域の選択を絞るために使え得る同定された測定位置がまだ存在しないため、同じ移動内における他の測定位置より、区域と関連付けることが難しい。もし、複数の区域が1番目の測定位置の限度内に含まれる場合は(606)、アルゴリズムは、同じ移動内における次のGPS測定位置(即ち、2番目の測定位置)を参照し、2つの測定位置間(即ち、1番目の測定位置と2番目の測定位置の間)の距離に対応して可能な動きに基づいて、複数の区域からいくつかのルートのセットを生成する。2番目の測定位置を用いても、1番目の測定位置に関して1つの区域候補に至らない場合は、アルゴリズムは同じ移動内の3番目の測定位置に移り、1番目の測定位置に関して1つの候補を探し出すために、可能性のあるルートを生成し、比較する。この工程は、1つの移動における残りのGPS測定位置が処理されるまで続く。
【0089】
このような実施形態の利点は、1番目の測定位置だけでは複数の区域の近辺に存在し得、そしてこれらの区域を区別することはできないが、更なる動き(即ち、2番目及び3番目の測定位置)を用いることで、1番目の測定位置に関連する区域の正体を決定することが可能になる。したがって、移動の1番目の区域はマップマッチング機能 によって決定される。移動の1番目の区域が決定されると、更なる区域を同定するために更なる測定位置を処理する。もちろん、次の測定位置が1番目の測定位置と同じ区域内に位置することは可能である(612)。
【0090】
したがって、移動におけるその後の測定位置は、同じ区域の距離限度内に含まれるかを決定するために処理され(610)、マップマッチング機能はその区域と距離限度内に位置する測定位置とを関連付けるように構成されている。マップマッチング機能によって処理された測定位置が距離限度内に入っていないと、その測定位置に対応する新たな区域候補を生成するように構成されている。しかし、次の区域が、直前に処理された区域の端につながるようにする限定を加えることも可能である。これらの隣接する区域は、基礎をなすマップデータからマップマッチング機能によって得られる。
【0091】
距離限度内に存在する区域がないこと、又は1つの区域に絞ることができないことにより、前の区域に続くある測定位置に対してマップマッチング機能が区域を同定できない場合は、単独のマッチが成立する1つの区域を同定するまで移動を制約するために、マップマッチング機能は更なる測定位置を探り続ける(616)。つまり、n番目の定位が1つだけの区域に関連付けられない場合、区域の同定をさらに絞るためにn+1番目の測定位置を用いる。n+1番目の定位が1つの区域の同定につながらない場合は、n+2番目の測定位置を用いる。いくつかの実施形態では、この処理は1つだけの区域が同定されるまで、又は移動内の全てのGPS測定位置が同定されるまで、続けられる。
【0092】
マップマッチング機能は単独の区域を同定するように構成されている。説明される実施形態では、マップマッチング機能は継続する経路を作ることを試みることなく、ただ区域を測定位置にマッチングしていく。異なる実施形態では、マップマッチング機能は継続する経路を作ることが望ましい。
【0093】
したがって、処理が終わるとマップマッチング機能は、分析中の移動においてナビゲーション装置200の動きが沿った道路区域の一連を取得する。次に、マップマッチング機能はこれらの道路区域を処理し、GPS測定位置から進入時間及び該区域の通過時間を割り当てる。これらの割り当てられた時間は、後の処理のため大量データ保存装置160に保存される。各区域に複数のGPS測定位置が保存されていることもあり得る。しかし、各区域に対して関連付けられたGPS測定位置の数がいくつであれ、区域における平均速度は入っている時間、GPS定位及び区域の長さ(この実施形態ではマップデータ内に保存されている)を用いて計算される。この平均速度は、対応する割り当てられた時間及び区域と関連付けられ、大量データ保存装置160に保存される。道路区域における交通の流れの速度に関連し、その区域に割り当てられた情報は、その道路区域の速度データにとして考えられ得る。
【0094】
サーバ150は、割り当てられた時間を処理し、それから1つ以上の平均値を下記のように生成する平均値機能を提供するために、平均値を計算するプログラムコードをプロセッサ154において実行するように構成されている。この実施形態で用いられる平均値計算工程は、図7を参照しながら説明される。
【0095】
工程の第1ステップ(700)では、平均値機能は、処理中のマップにおける各道路区域の平均速度をグループ化する。各道路区域のグループにおいて、平均値機能は、所定の時間間隔内の平均速度をグループ化するようにさらに構成されている(702)。したがって、同じ時間内(たとえば、8:00AMから8:59AMの間)で発生する平均速度は同じグループに含まれ、更に分析される。説明されている実施形態では、時間は1時間であるが、必ずしも1時間であることはなく、時間の長さを短くするとデータの分解能は上がるが、同時に保存に必要な容量も増えてしまうことは当業者には明らかであろう。他の適切な時間としては、実質的に、1分、5分、10分、15分、30分、2時間、6時間、12時間、またはこれらの間の任意の時間でもよい。
【0096】
ここで説明されている実施形態では、平均速度は、中央標準時間ではなく 、処理されるマップに含まれる領域の現地時間で保存されている。そのような方法は、交通に関するものに関する自然な基盤を提供するため、便利である。
【0097】
1つの移動において発生した平均速度が所定の時間にグループ化される前に、平均速度はデータの質を改善させるために選別される。この実施形態では、所定の範囲内に含まれる平均速度だけがグループに追加される。この実施形態では、所定の速度上限(180km/hなど)を超える速度を排除し、所定の速度下限(2km/h)を下回る速度も排除する。当業者には、ある区域の平均速度をはるかに下回る速度は、その区域における交通の問題(例えば、渋滞など)と関連があり得ることが明らかであろう。したがって、そのような状況に関するデータを含むことは、通常の状態を示すものとして考える場合、全体の精度を低下させ得る。他の実施形態では、許可される最大の速度は、その区域の制限速度であり得るが、そのような情報は処理されるマップデータにおいては不正確であり得ること、そしてある区域の制限速度は実際にその区域の交通状況を正確に表すものではないこともあり得るというのは、当業者には明らかである。
【0098】
所定の時間にグループ化することが実行されると、道路区域ごとの平均速度が所定の時間ごとに計算される。例えば、8:00AMから8:59AMまでの時間における全ての速度が、道路区域ごとに平均化される。平均速度を計算するためにはいくつかの選択肢があり、算術平均又は調和平均を用いる方法、或いは中央値を計算する方法がある。実際に、ある実施形態では、後の用途によって異なるデータセットに異なる重みを付けることができる。
【0099】
したがって、説明されている実施形態、及び処理されるマップには、マップの各道路区域には24個の平均速度が生成されており、これらは所定の1時間の時間間隔における平均速度である。もし異なる長さの時間が用いられると、異なる数の平均速度が生成されることは明らかである。更に、全ての道路区域が全ての時間における平均速度を持っているとは限らないことも明らかであり、これは、ある道路は交通量が少なく、特に早朝などの時間帯は交通量が少ないためである。
【0100】
しかし、区域ごとの平均速度を更に使用する前に、品質のチェックが行われる(706)。この実施形態では、チェックによって所定の数以上の割り当てられた時間が平均速度の計算に用いられることを確実にする。このような条件に合わない平均速度は、更なる処理のために排除され、その区域のひとつ以上の時間においてギャップが生じるようになる。ある実施形態では、5つ以下の値が平均速度の計算に使われた場合、その平均速度は排除される。他の実施形態は、異なる数を用い得、例えば2,3,4,6,7,8,10,20個の値、又はこれらの間の任意の値をも用い得る。
【0101】
又、平均値の品質に関する更なるチェックが行われ、ここでは平均値ごとの標準偏差を、その区域のその時間の平均値を計算するために用いられたデータサンプルの数の平方根 で割る。この計算の結果が所定の限度を超える場合は、その平均値は排除され、その区域のその時間にはギャップが生じるようになる。
【0102】
更なる品質チェックを行い、下記のような平均値を排除することも可能である:データの偏差が所定の限度を超えているか、所定の限度を超える外れ値が所定の数以上あるか。当業者には、そのような統計的技術を用いてデータの品質を確実にすることは明らかであろう。
【0103】
ある道路区域の平均値のセットは、その道路区域の観測された速度プロファイル と考えられ得る。
【0104】
ある道路区域の測定された速度プロファイルに少数の速度値が欠けている場合(即ち、全て又は少なくとも大勢の所定期間は値を持っている)、その区域は処理され得、欠けている値は隠され得る。欠けた区域 の数が増えると、結果として生じるクラスタ分析の品質は低下する。したがって、幾つの期間が欠けても許可できるかは、品質に関する選択であり、ケースによって検討する必要がある。高品質の完全なデータだけを用いることは、高速道路のような交通量の多い道に過剰な重みを付けることを意味し得る。必要条件が低すぎると(即ち、多くの期間が欠けている道路区域をクラスタ化すること)は、現実的でないクラスタ及び不正確な分析をもたらす。
【0105】
これらの品質チェックを通った平均値は信頼性があるとみなされ、更なる処理に用いられることが許可される。 ステップ708では1つの道路区域当たりの平均速度のカバレージに関する分析が行われる。 信頼性のある平均値のカバレージが十分に高い場合は、マップデータは更なる処理を受ける。しかし、カバレージが所定の限度以下であればマップは排除される。許可可能なマップは、図8を参照して説明されているように、クラスタ形成のために通される。
【0106】
そのようなクラスタ形成は、速度プロファイルを自動的又は半自動的に抽出することを目的とする。後で述べるように、類似する分類の道路はその速度プロファイルも類似しているのであれば、大幅なデータの圧縮が達成できる。例えば、日曜日の午前10時の、道路の第1区域における速度は、同じ道路の第2区域における同期間の速度と類似し得る。これらの道路区域における類似性が他の時間帯においても繰り返されている場合は、第1の区域と第2の区域は、同じ速度プロファイルで表わされていると考え得る。したがって、これから定義するクラスタ化はそのような類似性を見つけることを目的とするものである。速度プロファイルの正規化も、下記のように、速度プロファイルを異なる分類の道路に用いることを可能とし得る 。
【0107】
クラスタ化を行う前に、測定された速度プロファイルは夜間の期間を合併させるためにさらに処理される。この実施形態では、9PMから5AM(即ち、8個の期間)までの平均速度が平均化され、この夜間平均がこれらの8個の期間のそれぞれとして用いられる。したがって、各速度プロファイルは9PMから8AM の間には平らなプロファイルを持っており、その道路区域の交通の
自由流れ速度であると言える。自由流れ速度は、通常車のような乗り物がその道路において移動する際の速度として考えることができ、自由流れ速度はその道路区域の制限速度とは異なり得る。また、自由流れ速度はその道路区域の制限速度とほぼ同じであり得る。
【0108】
第1のステップ800では、クラスタの数を制限するために、測定された速度プロファイルを正規化させる。そのような正規化はいくつかの基準に従って行い得る。説明されている実施形態では、正規化は、ある平均速度と関連付けられた道路区域について計算された自由流れ速度に従って実行される。したがって、クラスタ化アルゴリズムに通される、道路区域ごとの平均速度は、0と1の間の値を持っている。そのような方法は、クラスタ化によって生成される速度プロファイルを、道路の種類から独立させることができ、同じ速度プロファイルのセットを、任意の種類の道路の区域にも用いることができるため、更なるデータ圧縮を可能にする。
【0109】
夜間の自由流れ速度を用いることは、夜間の速度値を考慮しないことを可能とするため、クラスタ形成の次元を減らせ得る。
更なる実施形態では、ある道路区域の平均速度又は制限速度を、正規化の更なる基準として用い得る。
【0110】
したがって、クラスタ化アルゴリズムを用いて類似した交通の振る舞いを見せる日を一緒にグループ化することができる。期待される交通の振る舞いが異なる場合は、クラスタ形成は独立的に実行されるべきである。クラスタ化アルゴリズムに入力されるパラメータは、希望されるクラスタの数であり、典型的な範囲は曜日ごとに10〜70個である。最適のクラスタにたどり着くための周知の方法がいくつかあり(例えば、何らかの品質指標を与えることや、トレンドによって数を増加/減少させることなど)、これらを用いてクラスタ化のアウトプットが容認できるかを決定し得る。
【0111】
ある実施形態では、クラスタ化アルゴリズムは約60クラスタを生成するように構成されている。他の実施形態では、アルゴリズムは最初はより多い又はより少ないクラスタを生成するように構成される。結果として生じるクラスタは、満足できるものであるか(例えば、実質的に同じクラスタはないか?不連続的なクラスタはないか?)を調べるために処理される。問題のあるクラスタがあれば、アルゴリズムを再実行させ、1回目より少ない数のクラスタを生成することを目標とする。この反復工程は、満足できるクラスタのセットが決定されるまで繰り返される。
【0112】
ある実施形態では、クラスタが満足できるものか は、クラスタによって生成されるプロファイルが所定の限度以上の周波数を含む かを調べるステップを含む。そのような周波数は、クラスタによって生成されたプロファイルの中に高すぎる変化率を持つ(即ち、不連続性があり得る)ことを示し、もしそのようなデータを使用すると、ナビゲーション装置200が不安定になるなどの問題が起こり得る。また、クラスタが満足できるものであるか否かは 、クラスタによって生成された速度プロファイルの各々をお互いに、又は少なくともいくつかをお互いに、比較する工程を含む。ある1つの実施形態では、これは最小二乗比較によって行われ得る。
【0113】
ある実施形態では、クラスタ 化はクラスタ分析によって行われ得るが、他のクラス構築方法を用いても良い。単純で効率的な方法としては、いわゆるK平均法がある。この非階層クラスタ分析方法は通常kランダム・シードから始まり、選択された測定基準に基づく最小エラー基準に従ってクラスのメンバの再分布を行う。このアルゴリズムは極小値にしか至らないため、最適な解決のためには複数回繰り返す必要がある。最終的なクラスタの重心は所定のクラスタを形成する。異なる実施形態では、異なるクラスタ化方法を用いられ、これらは階層的クラスタ分析及びファジークラスタリング法を含み得る。
【0114】
ある実施形態では、更なるクラスタを加え得る(804)。例えば、ある実施形態は、信頼できるパターンがない道路区域(例えば、データのカバレージが小さいため、又は交通に関連する問題などのため)に関しては、平らな線を速度プロファイルとして加え得る。
【0115】
クラスタによって生成された速度プロファイルを作成する最終的なステップ(806)として、クラスタは様々な時間分解能へと補間される。ある実施形態では、これは三次元スプラインを用いて行われるが、指数フィッティングなどの異なる方法も可能である。当業者にはそのような類似する方法が用いられ得ることが明らかである。
【0116】
クラスタ分析工程に用いられた時間分解能が、最終的に望まれるものより粗い場合(所定の時間において信頼性のある平均速度を確保するために、このようなことが起こり得る)においても、時間分解能を調整することがこの時点で可能となる。例えば、意図する使用の要件を満たすために、より細かい分解能に調整され得る。例えば、粗い時間分解能では時間的境界において大きな差が生じる個所では、より細かい時間分解能で継続的なプロファイルを用いることが有利であり得、より滑らかな経路を提供できる。説明される実施形態では、クラスタによって生成されるプロファイルは約5分の間隔の分解能を与えるために補間される。しかし他の間隔を用いても良い。そのような間隔は、クラスタによって生成された速度プロファイルを用いて処理するときに便利であり得る。
【0117】
図9は、クラスタ化アルゴリズムから得られる、マップに関する通常の結果を示しており、入力された平均速度値は、クラスタ化によって生成された独立した16個の速度プロファイルにクラスタ化されている。他の実施形態において、クラスタの数が変更されると、1つの道路区域において可能な速度プロファイルの数も変更される。
【0118】
クラスタ化によって生成された速度プロファイルの適切なセットが決定されると(この実施形態では16個が生成されている)、これらは1つ以上のマップに関連付けられる。一般的に、ある速度プロファイルのセットは、そのプロファイルの源となったマップに関してより正確であり得、これはそのマップに載っていない道路における交通現象が異なり得るからである。例えば、あるマップが1つの国を含んでいるとすると、異なる国における交通は少し違うパターンで動く可能性がある。
【0119】
しかし、異なる実施形態では、速度プロファイルは複数のマップと関連付けられ得る。このようなことは、例えばマップが国の一部を含む場合において適切であり、及び /又はマップを複数の国に用いることが適切であり得る。
処理中のマップに存在する各道路区域は分析され、クラスタ化によって生成された1つ以上の速度プロファイルを持ち得(図9参照)、この工程は図12を参照して説明される。n=1から始まり、n番目の道路区域が処理される(1200)。
【0120】
ここで、道路区域に関連付けられた速度データに関して参照する。当業者には、各道路区域は、マップを提供するマップデータ内のデータによって表されていることは明らかである。ある実施形態には、道路区域を表すそのようなデータは、速度データへの参照を提供する識別子を含み得る。例えば、該参照は生成された速度プロファイルへの参照を提供し得る。
【0121】
PNDが処理されたマップを用いることで正確な経路を生成できるようにするためには、各道路区域が夫々高い信頼性の速度プロファイルを持つことが望ましい(第1のステップとして、測定された速度プロファイルが適切であるか評価する)。したがって、前に行った品質評価によって、測定された速度プロファイルが品質の要件を満たさないと判断された場合は、代替作戦(Fallback Strategy)を用いて、測定された速度プロファイルを、PND又は他の装置によって経路指定のために処理した際によりいい結果を出し得る速度データで置き換える。
【0122】
測定された速度プロファイルが実際に不適切であると判断された場合、測定された速度プロファイルの代わりに、その道路区域において収集された全ての速度データの平均値を含む処理された道路区域についての平均速度1000を代替状態として用いる。即ち、各日の各期間において収集されたデータの平均値を求め、1つの速度を生成する。この1つの速度はやがて、フラット・クラスタ化によって生成された速度プロファイル(図9の15番) に割り当てられ得る 。
【0123】
次に、ある区域に対して収集されたデータから得られた平均速度を受け入れられるかを決定する。平均値がこれらのチェックを通ると、その平均値はその道路区域に使用される。
【0124】
統計学の当業者には、平均値の品質を測るための方法が明らかであろう。例えば、ある実施形態では平均値は所定の数以上の速度から生成されなければならないという条件があり得、その数は例えば10個の速度であり得る。平均値が最低値(例えば、2km/h)以上、及び/又は最高値(例えば、150km/h)以下のものであることを確実にするため、平均値に限度を適用し得る。また、平均値の品質が十分であるかを決定するために標準偏差を用い得る。
【0125】
道路区域は、マップデータ内において分類体系によって分類され得ることが知られており、それによって類似する特徴を持つ道路区域は同じ分類に分かれる。例えば、1つの関係者によって生成されたあるマップには、道路区域が分類される8個の分類がある。ある実施形態では、所定の道路区域についての分類に含まれる道路の所定の割合以上が、平均値の生成に使われる速度を提供することを保証するために、所定の道路区域の平均値が分析される。このテストが成功しないと、平均値が拒絶されることだけでなく、次に説明される、ギャップを埋める工程も省略され得る。
【0126】
道路区域における交通の流れが2つの方向に可能である場合、夫々の方向に対する平均速度が存在する。
【0127】
測定された速度プロファイルが代替作戦において置き換えられた場合、図9のクラスタ速度プロファイル15番のような平らな線を含む速度プロファイルが事実上存在することが明らかであろう。また、速度プロファイル情報は正規化されているため、速度プロファイル15番は、1つの平均速度が関連付けられたどんな道路区域を表すためにも用いられ得る。
【0128】
ある区域において収集されたデータから得られた平均速度がいまだに品質チェックを通らない場合は、代替作戦のつぎのステップ(1002)が用いられ、図11を用いて次に説明する、いわゆるギャップ埋め工程が使用される。第1ステップとして、処理されるマップに存在する各道路区域は、所定数の分類のうちの1つの分類として分類される(1100)。当業者には、この分類が1回のみ行われればいいことが明らかであり、結果として生じる分類は、ギャップ埋め工程が行われるさらなる道路区域のために保たれる。もちろん、他の実施形態では、ギャップ埋め工程が行われるたびに計算しなおしてもよく、又は分類を即座に計算しても良い。
【0129】
説明される実施形態では、次の表1に示されているような40の分類が存在する。これらの分類は、処理されるマップデータ、マップに含まれる領域、又は他の関連するいかなる要因によっても異なり得る。
【表1】
【0130】
各道路区域が分類されると、分類ごとの平均速度が計算され(1102)、この場合は40の部類の平均速度が計算される。生成された分類ごとの平均は、分類ごとに1つの数字であり、このような平均を得るためには、各所定の時間ごとの速度を、本明細書に記載された任意の適切な平均値計算方法を用いて求める。当業者には、このステップが1回のみ行われればいいことが明らかであり、結果として生じる分類ごとの平均速度は、後に行われるギャップ埋め工程のために保たれる。
【0131】
しかし、この実施形態では、各分類の平均速度は、分類に含まれる全ての要素の、長さによって重み付けされた調和平均として計算されており、次のような計算式を用いる:
Vmean=L/Σli/Vi
ここで
Vmeanは、分類jの平均速度、
liは、線iの長さ、
Lは、分類jに含まれる全ての線の長さ合計、
Viは、線iの平均速度である。
【0132】
これらの平均速度が更に使われる前に、十分な品質のものであり、その分類の道路の平均速度を正確に表しているかをチェックする。道路の分類の所定の時間に含まれるサンプルが少な過ぎたり、又は平均の計算に用いられるサンプルのばらつきが激しい場合、品質は不十分であり得る。したがって、各平均値の品質に関するチェックが下記のように行われる(1104)。
【0133】
40の分類中のある1つの分類からの平均速度が、hit_number_min(本実施形態については、これは表2に示されている)より少ない数の区域に基づいている場合は、表3に示されているように、この平均値は異なる分類からの値で置き換えられる。説明される実施形態では、ヒット(hit)の最低限の数は10であるが、他の実施形態では異なる数を用い得る。
【0134】
所定の分類のquality_factor_abs及びquality_factor_relのいずれも図2に示された値以下でなければ、速度分類の平均値は図2に示されているように、割り当てられた置き換え分類の平均値によって置き換えられる。quality_factor_rel_minは、平均速度をヒットの数の平方根で除したものに対する%として表される、分類の相対的な標準偏差として与えられ、すなわちquality_factor_abs*100/mean_speedである。
【0135】
したがって、任意の分類の平均速度が使えるようになるまでパスしなければいけない3つの品質要素(Qquality_factor_abs_min, quality_factor_rel_min, hit_number_min)がある。品質要素をパスできない場合は、その平均速度は表3に従って置き換えられる。
【表2】
【表3】
【0136】
表2に示された値は例として示されており、他の実施形態では異なり得る。同様に、表3で用いられた置き換え値も、マップに含まれる領域、マップデータを生成した者などによって異なり得る。
【0137】
ある分類に含まれる任意の平均値が使えるようになる前に、品質チェックが行われる。これらのチェックをパスできない場合は、ギャップ埋め工程はその分類において失敗することとなる。これらの品質チェックは次のようなものである。
【0138】
分類の平均値は、次のように計算される最低限度のより高く、そして最高限度より低い値であり、min及びmaxは最低関数及び最高関数の擬似的なコードである。
Min_speed_threshold=max[max(min−lower_relative_devision*min/100、min−lower_absolute_devision),lower_limit]
Max_speed_threshold=min[min(mean+upper_relative_devision*mean/100,mean+upper_absolute_devision),upper_limit]
ここでmeanは、区域の適切な速度分類の平均速度である。他の値は表4に定義されている。
【0139】
ある区域に関連する速度がこれらの基準に合わない場合は、区域に関する速度が絶対的な速度制限に背かない限りその速度は平均速度に基づいてその閾値によって置き換えられ、そのような場合にはこの絶対的な速度制限をその区域の速度として用いる。
【表4】
当業者には、ここにおける計算は速度に関して行われており、時間に関して行われていないことが明らかであろう。
【0140】
したがって、ギャップ埋め工程が終わると、所定の40の分類中の1つの分類内の道路区域に基づいた平均速度が生成され得る。しかし、それでもギャップ埋め工程が失敗することもある(即ち、品質チェックをパスする平均値が生成されていない)。
【0141】
したがって、関連する速度データを持たない道路区域は、ギャップ埋め工程によって生成された平均速度データ(ただし、この平均値が品質チェックにパスすれば)が割り当てられる(1108)。
【0142】
ギャップ埋めが失敗すると、ステップ1004において、その道路区域に関連する速度は、Functional Road Class(FRC)に従ってマップデータ供給者から供給される速度に指定される。FRCは例えば大まかに8つの分類を含み得る(この数はマップデータ供給者によって異なり得る)。即ち、自由流れ速度はFRCによる値に設定され、クラスタによって生成される速度プロファイルは、この実施形態では、プロファイル15番である。
【0143】
次に、ある道路区域に関連する速度プロファイル(測定された速度プロファイル又はギャップ埋めによって挿入された平均値)は、PNDのようなナビゲーション装置で使用できるようなマップデータを生成するために、クラスタ化によって生成された1つの速度プロファイルに割り当てられる 。これは、速度プロファイルが測定された速度プロファイルであっても、クラスタ化によって生成された平らな速度プロファイル15番を考慮した平均であっても、行い得る。
【0144】
ステップ1210では、最小二乗分析を用いて、クラスタ化によって生成された速度プロファイルのセット内のそれぞれ速度プロファイルに対して、得られた速度プロファイルが比較される。これらの16の比較が行われた後、16個のセットのうちのどの速度プロファイルが、該道路区域に関連する速度プロファイルに最も近いのかを判断できるようになり、ステップ1220では最も近いと判断された、クラスタ化によって生成された速度プロファイルへの参照が、その道路区域ついてのマップデータに保存される。該道路区域に関連して保存されるマップデータは、その道路区域の自由流れ速度であり、以前に計算されたものである。
【0145】
したがって、上記の参照及び自由流れ速度を用いて、各道路区域の平均速度に関する情報をマップデータ内に保存できる。交通量が多い区域は、平均速度情報は9AMから5PMまでの1時間ごとの平均に関する近似値を含むと考えることができる。交通量が少ない区域は、平均速度情報は全ての時間にわたって平均された平均速度と考えることができる。
【0146】
この工程は、マップ上の各道路速度に、クラスタ化によって生成された16の速度プロファイルのうちの1つが関連付けられるまで繰り返される(1230)。
【0147】
マップデータが公開される前に、(測定値の代わりに挿入された平均値ではなく、)測定された速度プロファイルが関連付けられた道路区域の数が十分であるか最終チェックを行う。
【0148】
この最終チェックでは、各機能的道路分類(ファンクショナル・ロード・クラス:FRC)についての道路区域の全長が計算される。下記の表5に示されているように、FRCは表2に示された40の分類に関連している。各FRC内において平均速度データを持つ道路区域の長さは、図5に示されているように、FRC内の道路全長の所定の割合(限度)以上でなければならない。
【表5】
【0149】
ルーティング動作に一般的により大きい影響を及ぼす道路分類は、より高い割合の最低カバレージが必要となることがわかるようになるだろう。例えば、FRC0(高速道路)は経路計画に大きい影響を及ぼすため60%を有することが必要になるが、例えば二次道路は30%の包含率が必要となっている。
【0150】
他の実施形態では、更なる代替作戦が提供され得る。そのような実施形態においては、第1の代替作戦が(測定された速度プロファイルが受け入れられないと判断された場合)、測定された速度プロファイルを夫々の日に用いることの代わりに、各日の所定の時間に関する速度プロファイルを合計し、結果として生じる合計速度プロファイルを各日に用いるものであり得る。したがって、そのような実施形態では、月曜日から金曜日までの同じ時間帯の期間を合計して週ごとの速度プロファイルが生成され、週末の速度プロファイルは土曜日及び日曜日の同じ時間帯の期間を合計することで生成される。週末の交通の流れは平日の交通の流れと異なり得ることが明らかであろう。
【0151】
そのように合計された速度プロファイルは、他の代替作戦を用いる前に、品質の要件を満たしているかがチェックされる。これらのチェックは、測定された速度プロファイルを評価するために用いられる要件と同じもの、又は少なくとも似たもので行われ得る。データの合計を行うことによってデータの品質が改善され、平日及び週末の両方が品質チェックをパスした場合、その速度プロファイルはその道路区域に用いられる。
【0152】
当業者には、ここに説明される方法を実行するために提供される装置はハードウェア、ソフトウェア、ファームウェア又はこれらの2つ以上の組み合わせであり得ることが明らかであろう。
【0153】
当業者には、図1を用いて説明されたようにGPSから得られる位置決定データを参照するためにGPSデータという用語を用いているが、他の位置決定データもここに説明された方法に似たような方法で処理できることが明らかであろう。したがって、GPSデータという用語は「位置決定データ」で置き換えが可能であり得る。そのような位置情報は、例えば移動電話の作動、料金所で受信したデータ、道路に埋め込まれた誘導ループシステムから得られるデータ、乗り物のナンバープレート認識システムから得られるデータ、又は他の適切なデータから抽出することができる。
【特許請求の範囲】
【請求項1】
マップに含まれる領域内のナビゲーションできる経路の区域を表すナビゲーションできる、夫々関連付けられた速度データを持つ、複数の区域を含むマップデータを位置決定データから生成する方法であり、
(i)1つ以上のナビゲーション装置を用いて位置決定データを生成する工程と、
(ii)前記位置決定データを処理して、前記位置決定データから速度データを生成する工程と、
(iii)ナビゲーション装置による使用に適切なマップデータの生成が起こった、ナビゲーションできる区域に前記速度データを関連付けるために、前記マップデータを前記速度データでアップデートする工程と、
を含み、
前記生成された速度データは、前記速度データを生成する前記位置決定データが発生したナビゲーションできる区域と関連付けられている、ことを特徴とする方法。
【請求項2】
1つ以上のナビゲーション装置の各々から位置決定データをサーバにアップロードする工程を含み、前記サーバは前記速度データを生成するために前記位置決定データを処理するように構成されていることを特徴とする、請求項1に記載の方法。
【請求項3】
前記サーバは分析のために、前記位置決定データを前記データが得られた後に保存することを特徴とする、請求項2に記載の方法。
【請求項4】
前記位置決定データは、ナビゲーション装置の1つの移動を表す移動データを生成するために処理されることを特徴とする、請求項1乃至3のいずれか1項に記載の方法。
【請求項5】
前記位置決定データは、前記データ内の位置をナビゲーションできる区域に関連付けるために処理されることを特徴とする、請求項1乃至4に記載の方法。
【請求項6】
前記生成された速度は、関連付けられたナビゲーションできる区域の複数の所定の期間のうちの1つの期間に分類されることを特徴とする、請求項1乃至5のいずれか1項に記載の方法。
【請求項7】
測定された速度プロファイルを生成するために、各ナビゲーションできる区域の前記所定の期間の各々において速度を平均し、各所定の期間の前記平均速度は、前記測定された速度プロファイルにおいて1つの点を提供することを特徴とする、請求項6に記載の方法。
【請求項8】
生成された速度プロファイルのクラスタを生成するために、前記測定された速度プロファイルにクラスタ分析を行う工程を含むことを特徴とする、請求項7に記載の方法。
【請求項9】
少なくともいくつかのナビゲーションできる区域(一般的には各ナビゲーションできる区域)に関連付けられた速度データをクラスタ生成された速度データにマッピングする工程を含むことを特徴とする、請求項8に記載の方法。
【請求項10】
前記少なくともいくつかのナビゲーションできる区域(一般的には各ナビゲーションできる区域)に関連付けられた速度データを、前記クラスタ生成された区域を参照して置き換えることを特徴とする、請求項9に記載の方法。
【請求項11】
携帯電話操作から由来する位置情報、料金徴収所から受信したデータ、道路またはほかのナビゲーションできる経路に埋め込まれた誘導ループから得られたデータ、ナンバープレート認識システムから得られたデータのいずれかの情報源を含む、ナビゲーション装置でない情報源からの位置決定データを用いることを特徴とする、請求項1乃至10に記載の方法。
【請求項12】
1つ以上(一般的には複数)のナビゲーション装置に前記マップデータをダウンロードする工程を含む、請求項1乃至11に記載の方法。
【請求項13】
マップに含まれる領域内のナビゲーションできる経路の区域を表すナビゲーションできる、夫々関連付けられた速度データを持つ、複数の区域を含むマップデータを生成するように構成されたシステムであり、
少なくとも1つ(一般的には複数)のナビゲーション装置から位置決定データを受信するように構成された受信機と、
前記位置決定データを処理し、前記位置決定データから速度データを生成するように構成された処理回路と、を含み、
前記生成された速度データは、前記速度データを生成する前記位置決定データが発生したナビゲーションできる区域と関連付けられており、
前記処理回路はさらに、ナビゲーション装置による使用に適切なマップデータの生成が発生された、ナビゲーションできる区域に前記速度データを関連付けれられるために、前記マップデータを前記速度データでアップデートするように構成されていることを特徴とする、システム。
【請求項14】
メモリを含む処理回路を備えるナビゲーション装置であって、前記ナビゲーション装置の前記処理回路は、
前記装置のユーザを誘導する経路の指示のセットを生成するために、前記メモリに保持されたマップデータを処理し、
前記装置によって生成された位置決定データを前記メモリ内に保存し、
前記ナビゲーション装置から遠隔であるサーバへ前記位置決定データをアップロードするように構成されていることを特徴とする装置。
【請求項15】
命令を含む、機械可読な記憶媒体であって、機械によって読み込まれると前記機械に、
(i)請求項1乃至12のいずれかの方法を実行させることと、
(ii)請求項13のシステムとして機能させることと、
(iii)請求項14のナビゲーション装置として機能させることと、
を実行させることを特徴とする記憶媒体。
【請求項1】
マップに含まれる領域内のナビゲーションできる経路の区域を表すナビゲーションできる、夫々関連付けられた速度データを持つ、複数の区域を含むマップデータを位置決定データから生成する方法であり、
(i)1つ以上のナビゲーション装置を用いて位置決定データを生成する工程と、
(ii)前記位置決定データを処理して、前記位置決定データから速度データを生成する工程と、
(iii)ナビゲーション装置による使用に適切なマップデータの生成が起こった、ナビゲーションできる区域に前記速度データを関連付けるために、前記マップデータを前記速度データでアップデートする工程と、
を含み、
前記生成された速度データは、前記速度データを生成する前記位置決定データが発生したナビゲーションできる区域と関連付けられている、ことを特徴とする方法。
【請求項2】
1つ以上のナビゲーション装置の各々から位置決定データをサーバにアップロードする工程を含み、前記サーバは前記速度データを生成するために前記位置決定データを処理するように構成されていることを特徴とする、請求項1に記載の方法。
【請求項3】
前記サーバは分析のために、前記位置決定データを前記データが得られた後に保存することを特徴とする、請求項2に記載の方法。
【請求項4】
前記位置決定データは、ナビゲーション装置の1つの移動を表す移動データを生成するために処理されることを特徴とする、請求項1乃至3のいずれか1項に記載の方法。
【請求項5】
前記位置決定データは、前記データ内の位置をナビゲーションできる区域に関連付けるために処理されることを特徴とする、請求項1乃至4に記載の方法。
【請求項6】
前記生成された速度は、関連付けられたナビゲーションできる区域の複数の所定の期間のうちの1つの期間に分類されることを特徴とする、請求項1乃至5のいずれか1項に記載の方法。
【請求項7】
測定された速度プロファイルを生成するために、各ナビゲーションできる区域の前記所定の期間の各々において速度を平均し、各所定の期間の前記平均速度は、前記測定された速度プロファイルにおいて1つの点を提供することを特徴とする、請求項6に記載の方法。
【請求項8】
生成された速度プロファイルのクラスタを生成するために、前記測定された速度プロファイルにクラスタ分析を行う工程を含むことを特徴とする、請求項7に記載の方法。
【請求項9】
少なくともいくつかのナビゲーションできる区域(一般的には各ナビゲーションできる区域)に関連付けられた速度データをクラスタ生成された速度データにマッピングする工程を含むことを特徴とする、請求項8に記載の方法。
【請求項10】
前記少なくともいくつかのナビゲーションできる区域(一般的には各ナビゲーションできる区域)に関連付けられた速度データを、前記クラスタ生成された区域を参照して置き換えることを特徴とする、請求項9に記載の方法。
【請求項11】
携帯電話操作から由来する位置情報、料金徴収所から受信したデータ、道路またはほかのナビゲーションできる経路に埋め込まれた誘導ループから得られたデータ、ナンバープレート認識システムから得られたデータのいずれかの情報源を含む、ナビゲーション装置でない情報源からの位置決定データを用いることを特徴とする、請求項1乃至10に記載の方法。
【請求項12】
1つ以上(一般的には複数)のナビゲーション装置に前記マップデータをダウンロードする工程を含む、請求項1乃至11に記載の方法。
【請求項13】
マップに含まれる領域内のナビゲーションできる経路の区域を表すナビゲーションできる、夫々関連付けられた速度データを持つ、複数の区域を含むマップデータを生成するように構成されたシステムであり、
少なくとも1つ(一般的には複数)のナビゲーション装置から位置決定データを受信するように構成された受信機と、
前記位置決定データを処理し、前記位置決定データから速度データを生成するように構成された処理回路と、を含み、
前記生成された速度データは、前記速度データを生成する前記位置決定データが発生したナビゲーションできる区域と関連付けられており、
前記処理回路はさらに、ナビゲーション装置による使用に適切なマップデータの生成が発生された、ナビゲーションできる区域に前記速度データを関連付けれられるために、前記マップデータを前記速度データでアップデートするように構成されていることを特徴とする、システム。
【請求項14】
メモリを含む処理回路を備えるナビゲーション装置であって、前記ナビゲーション装置の前記処理回路は、
前記装置のユーザを誘導する経路の指示のセットを生成するために、前記メモリに保持されたマップデータを処理し、
前記装置によって生成された位置決定データを前記メモリ内に保存し、
前記ナビゲーション装置から遠隔であるサーバへ前記位置決定データをアップロードするように構成されていることを特徴とする装置。
【請求項15】
命令を含む、機械可読な記憶媒体であって、機械によって読み込まれると前記機械に、
(i)請求項1乃至12のいずれかの方法を実行させることと、
(ii)請求項13のシステムとして機能させることと、
(iii)請求項14のナビゲーション装置として機能させることと、
を実行させることを特徴とする記憶媒体。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公表番号】特表2011−502248(P2011−502248A)
【公表日】平成23年1月20日(2011.1.20)
【国際特許分類】
【出願番号】特願2010−530451(P2010−530451)
【出願日】平成20年10月22日(2008.10.22)
【国際出願番号】PCT/EP2008/064322
【国際公開番号】WO2009/053410
【国際公開日】平成21年4月30日(2009.4.30)
【出願人】(307043223)トムトム インターナショナル ベスローテン フエンノートシャップ (144)
【Fターム(参考)】
【公表日】平成23年1月20日(2011.1.20)
【国際特許分類】
【出願日】平成20年10月22日(2008.10.22)
【国際出願番号】PCT/EP2008/064322
【国際公開番号】WO2009/053410
【国際公開日】平成21年4月30日(2009.4.30)
【出願人】(307043223)トムトム インターナショナル ベスローテン フエンノートシャップ (144)
【Fターム(参考)】
[ Back to top ]