
位置測位システム
【課題】 2つ以上のGPSセンサを用いて、位置測位精度を向上することができる位置測位システムを提供することを目的とする。
【解決手段】GPS衛星からのGPS衛星信号を受信する複数のアンテナと、複数のアンテナのうち対応するアンテナからのGPS衛星信号を受信し、位置情報及びDOP値を出力する複数のGPS衛星信号処理部と、複数のGPS衛星信号処理部のうち、最も小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力する位置情報出力部と、を備えたことを特徴とする位置測位システムである。
【解決手段】GPS衛星からのGPS衛星信号を受信する複数のアンテナと、複数のアンテナのうち対応するアンテナからのGPS衛星信号を受信し、位置情報及びDOP値を出力する複数のGPS衛星信号処理部と、複数のGPS衛星信号処理部のうち、最も小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力する位置情報出力部と、を備えたことを特徴とする位置測位システムである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置測位システムに関する。
【背景技術】
【0002】
本技術分野の背景技術として、特開平5−18771号公報(特許文献1)がある。この公報には、「GPS(Global Positioning System )レシーバを用いたGPSナビゲーションシステムの測位精度を向上し、より正確なナビゲーションを行うために、GPS測位用電波により第1位置データP1を出力するGPS測位手段101と、測位センサの出力により第2位置データP2 を出力する自立型測位手段102と、前回と今回の第1位置データの差が第1所定値以内か判別する第1位置データ比較判別手段103と、今回の第1位置データのPDOP値が第2所定値以下かを判別するPDOP値判別手段104と、今回の第1、第2位置データP1 、P2 が示す現在位置の距離差が第3所定値以上かを判別する距離差判別手段105と、前回と今回の第1位置データの差が第1所定値以内、前記PDOP値が第2所定値以下、かつ、距離差が第3所定値以上のとき第1位置データP1 を現在位置データDPOS として出力する切換手段106と、を備える。」と記載されている(要約参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平5−18771号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般的にGPSセンサの測位データには誤差がある。その誤差は使用環境によってGPS衛星からの電波の反射や遮蔽といった様々な要因で大きくなる場合がある。
例えば、前記特許文献1では、GPSセンサと自立センサとを併用し、測位精度を向上させるナビゲーションシステムが記載されている。しかし、特許文献1のナビゲーションシステムでは車両にあらかじめ搭載されているセンサ(例えば、地磁気センサ、ガスレートジャイロ等の方位センサやクランクシャフトの回転数等を検地する速度センサなど。)を使用する必要があり、移動体に設置されている自立センサから情報が取れないシステムにおいては、測位精度を向上させることは困難である場合が多い。
【0005】
そこで、本発明の目的は、2つ以上のGPSセンサを用いて、位置測位精度を向上することができる位置測位システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、例えば特許請求の範囲に記載の構成を採用する。
本願は上記課題を解決する手段を複数含んでいるが、その一例を挙げるならば、GPS衛星からのGPS衛星信号を受信する複数のアンテナと、複数のアンテナのうち対応するアンテナからのGPS衛星信号を受信し、位置情報及びDOP値を出力する複数のGPS衛星信号処理部と、複数のGPS衛星信号処理部のうち、最も小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力する位置情報出力部と、を備えたことを特徴とする位置測位システムである。
【発明の効果】
【0007】
本発明によれば、2つ以上のGPSセンサを用いて、位置測位精度を向上することができる位置測位システムを提供することができる。
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0008】
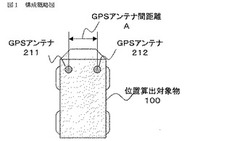
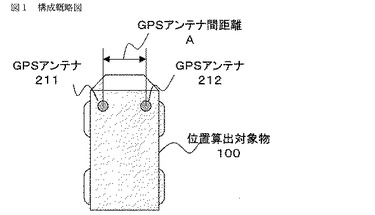
【図1】本実施例の構成概略図の例である。
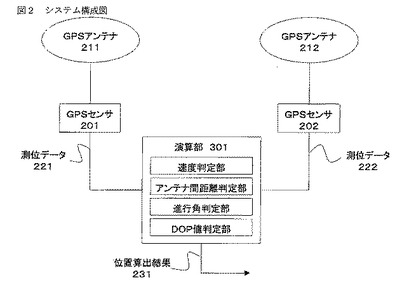
【図2】本実施例を適用するシステムの機器構成図の例である。
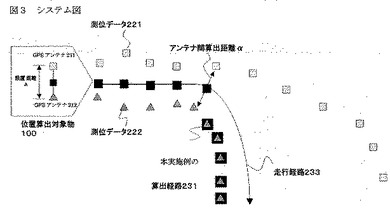
【図3】本実施例を適用するシステム図を示す例である。
【図4】本実施例の処理を説明するフローチャートの例である。
【発明を実施するための形態】
【0009】
以下、実施例を図面を用いて説明する。
【実施例1】
【0010】
本実施例では、2台のGPSセンサを利用し誤差を低減した位置情報を算出する位置測位システムについて説明する。
図1は、本実施例の位置測位システムの構成を説明するための図である。位置測位システムの位置測位の対象は位置算出対象物100である。図1に示すように、本実施例の位置測位システムは、この位置算出対象物100を対象として利用されるものであり、位置GPSアンテナ211・212と、このGPSアンテナが受信するGPS衛星信号を受信して処理する図示しないGPSセンサ201・202を備えている。AはGPSアンテナ間の距離を示す。
【0011】
図2は、本実施例の位置測位システムのシステム構成の例を示す図である。GPSアンテナ211・212はそれぞれGPS衛星からのGPS衛星信号を受信する。GPSアンテナが受信したGPS衛星信号はそれぞれGPSセンサ201・202に送られて処理される。このGPSセンサにおいてGPS衛星信号が処理されることにより、測位データが得られる。この測位データには、GPSアンテナの位置を示す位置情報や、GPSアンテナの速度を示す速度情報、あるいはGPSアンテナの進行角の情報が得られる。
【0012】
さらに測位データには、DOP(Dilution Of Precision)値が含まれている。一般的にGPS衛星信号による位置測位の精度は、GPS衛星の配置状態に大きく影響し、例えば、4つのGPS衛星がほとんど同じ方向にあると精度は劣化し、平均的に広がって配置されていると向上する。 この各GPS衛星の配置を示す値がDOP値であり、DOP値が低い程、位置測位の精度は高く、DOP値が大きくなると、位置測位精度は低くなる。DOP値が1〜5程度であれば、測位は可能であるが、DOP値が10を超えると測位の精度はかなり落ちるものである。
【0013】
本実施例の位置測位システムにおいては、GPSセンサ201・202において処理されて出力された信号、すなわち上記した測位データの信号を演算部301において受信して図4に示すフローチャートの処理を行う。なお、図2に図示されていないが、演算部301で算出した位置情報を表示する表示部を備えていてもよい。
【0014】
図3は、本実施例の位置測位システムを適用例を説明するための図である。GPSアンテナ211からのGPS衛星信号は図示しないGPSセンサ201により処理されて測位データ221を出力し、同様にGPSアンテナ212からのGPS衛星信号は図示しないGPSセンサ202により処理されて測位データ222を出力する。GPS衛星からの電波の反射や遮蔽などの原因により、測位データ221が示すような実際のGPSアンテナの位置情報と測位データに基づく位置情報とに大きな誤差が生じることがある。一方で測位データ212から求まる位置情報はGPSアンテナの位置情報をおよそ正確に示している。このように本実施例では、GPSセンサを2台使用することで、自立センサや固定基準局を必要としない普及型の単独測位方式において、測位データよりアンテナ間距離と進行角を監視し処理することにより誤差を低減した位置算出システムを提供する。
【0015】
本実施例においては、測位データ221のように、測位データに基づく位置情報に正確な位置情報との大きな誤差が生じた場合であっても実際の位置情報に近い正確な位置測位を行うために、2つのGPSアンテナ211・212、及び、GPSセンサ201・201を備え、これらを用いて位置測位を行うものである。すなわち、図2の演算部301により図4に示すフローチャートの処理を行い、より正確な位置測位を行う。
【0016】
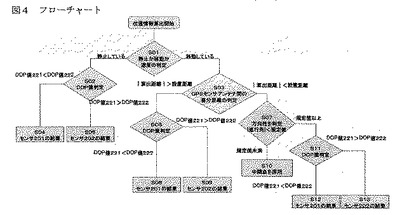
図4は、演算部301の処理フローを説明するための図である。演算部301はGPSセンサ201・202からそれぞれ測位データ221・222を受信して以下に説明する処理を行うことで、算出した位置情報を出力する。演算部301により位置情報の算出を開始すると、まずS01で速度判定部によりGPSアンテナが移動しているか否かを判断する。この判断はGPSアンテナ211・212の何れの測位データ221・222に基づいて行ってもよい。
【0017】
処理ステップS01で移動していると判断した場合には、処理ステップS03でアンテナ間距離判定部により、GPSアンテナ211と212との間のアンテナ間距離αを算出する。アンテナ間距離判定部は測位データ221と222の位置情報からアンテナ間距離αを算出し、さらに設置実距離Aと比較し、どちらが大きいか判断する。設置実距離A>算出距離αの場合には、処理ステップS07へ移行する。処理ステップS07では、進行角判定部により測位データ221・222のそれぞれから求まる進行角差βを算出し、この進行角差βが予め設定された規定値内かどうか判断する。
【0018】
処理ステップS07おいて進行角β<規定値の場合には、2台のGPSアンテナ211と212が同じ方向へ移動していることを判別することができ、これにより、それぞれの測位データに大きな誤差がないことを判別することができ。この場合には、演算部301は処理ステップS10に移行して測位データ221と222からそれぞれ求まる位置情報の中間点(平均値)を算出して出力する。この処理ステップS10より、2台のGPSセンサの測位データ221と222に含まれるそれぞれの誤差量を低減させ、より測位精度の良好な位置情報を算出することが可能となる。
【0019】
一方で、処理ステップS07で、算出した進行角β>規定値の場合にはそれぞれのGPSアンテナ211・212が異なる方向に進んでいることが分かるため、一方の測位データに大きな誤差があることと判断できる。この場合には、処理ステップS11へ移行し、GPSセンサ201と202から得られる測位データ221と222のDOP値を比較する。DOP値の低い測位データの方が測位精度が高いため、処理ステップS11ではDOP値の低い測位データを選択して、この測位データから求まる位置情報として算出し出力する。この処理ステップS11より、一方の測位データに大きな誤差が生じた場合であっても測位精度の良好なデータを利用することで位置測位精度を向上することが可能となる。
【0020】
また、処理ステップS03へ戻り、アンテナ間距離判定部により設置実距離A<算出距離αと判断した場合には、処理ステップS06へ移行する。この場合にも同様に一方の測位データに大きな誤差があることが考えられるため、処理ステップS06において処理ステップS11と同様にDOP値の低い測位データを選択して、この測位データから求まる位置情報を算出結果として出力する。これにより一方の測位データに大きな誤差が生じた場合であっても、測位精度を向上することが可能となる。
【0021】
また、処理ステップS01へ戻り、位置算出対象物が静止している場合、処理ステップS02へ移行する。処理ステップS02は、処理内容は上記の処理ステップS11と同様となる。
【0022】
以上に説明したように、本実施例の位置測位システムは、GPS衛星からのGPS衛星信号を受信する複数のアンテナ(211・212)と、複数のアンテナのうち対応するアンテナからのGPS衛星信号を受信し、位置情報及びDOP値を出力する複数のGPS衛星信号処理部(201・202)と、複数のGPS衛星信号処理部(201・202)のうち、最も小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力する位置情報出力部(301)と、を備えたことを特徴とするものである。またこの場合において以下の態様であることが望ましい。
(1)位置情報出力部(301)は、2つのGPS衛星信号処理部(201・202)から出力される位置情報の差が設定距離以上であった場合に、2つのGPS衛星信号処理部(201・202)のうち小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力すること。
(2)位置情報出力部(301)は、2つのGPS衛星信号処理部(201・202)から出力される位置情報の差が設定距離より低い場合に、2つのGPS衛星信号処理部(201・202)から出力される位置情報の平均値を出力すること。
(3)複数のGPS衛星信号処理部(201・202)は、対応するアンテナにより受信されたGPS衛星信号に基づいて算出した進行角を出力し、位置情報出力部(301)は、2つのGPS衛星信号処理部(201・202)から出力される位置情報の差が設定距離より低い場合で、かつ、2つのGPS衛星信号処理部(201・202)から出力される進行角の差が設定角より低い場合に、2つのGPS衛星信号処理部(201・202)から出力される位置情報の平均値を出力すること。
(4)位置情報出力部(301)は、2つのGPS衛星信号処理部(201・202)から出力される位置情報の差が前記設定距離より低い場合で、かつ、2つのGPS衛星信号処理部(201・202)から出力される進行角の差が前記設定角以上の場合に、2つのGPS衛星信号処理部(201・202)のうち小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力すること。
【0023】
なお、本発明は上記した実施例に限定されるものではなく、様々な変形例が含まれる。例えば、上記した実施例は本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施例の構成の一部を他の実施例の構成に置き換えることが可能であり、また、ある実施例の構成に他の実施例の構成を加えることも可能である。また、各実施例の構成の一部について、他の構成の追加・削除・置換をすることが可能である。
【0024】
また、上記の各構成、機能、処理部、処理手段等は、それらの一部又は全部を、例えば集積回路で設計する等によりハードウェアで実現してもよい。また、上記の各構成、機能等は、プロセッサがそれぞれの機能を実現するプログラムを解釈し、実行することによりソフトウェアで実現してもよい。各機能を実現するプログラム、テーブル、ファイル等の情報は、メモリや、ハードディスク、SSD(Solid State Drive)等の記録装置、または、ICカード、SDカード、DVD等の記録媒体に置くことができる。
【0025】
また、制御線や情報線は説明上必要と考えられるものを示しており、製品上必ずしも全ての制御線や情報線を示しているとは限らない。実際には殆ど全ての構成が相互に接続されていると考えてもよい。
【符号の説明】
【0026】
100 位置算出対象物
201、202 GPSセンサ
211、212 GPSアンテナ
221、222 GPS測位データ
231 位置算出結果
301 演算部
A アンテナ設置間距離
α アンテナ算出距離
S01〜S13 処理ステップ
【技術分野】
【0001】
本発明は、位置測位システムに関する。
【背景技術】
【0002】
本技術分野の背景技術として、特開平5−18771号公報(特許文献1)がある。この公報には、「GPS(Global Positioning System )レシーバを用いたGPSナビゲーションシステムの測位精度を向上し、より正確なナビゲーションを行うために、GPS測位用電波により第1位置データP1を出力するGPS測位手段101と、測位センサの出力により第2位置データP2 を出力する自立型測位手段102と、前回と今回の第1位置データの差が第1所定値以内か判別する第1位置データ比較判別手段103と、今回の第1位置データのPDOP値が第2所定値以下かを判別するPDOP値判別手段104と、今回の第1、第2位置データP1 、P2 が示す現在位置の距離差が第3所定値以上かを判別する距離差判別手段105と、前回と今回の第1位置データの差が第1所定値以内、前記PDOP値が第2所定値以下、かつ、距離差が第3所定値以上のとき第1位置データP1 を現在位置データDPOS として出力する切換手段106と、を備える。」と記載されている(要約参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平5−18771号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般的にGPSセンサの測位データには誤差がある。その誤差は使用環境によってGPS衛星からの電波の反射や遮蔽といった様々な要因で大きくなる場合がある。
例えば、前記特許文献1では、GPSセンサと自立センサとを併用し、測位精度を向上させるナビゲーションシステムが記載されている。しかし、特許文献1のナビゲーションシステムでは車両にあらかじめ搭載されているセンサ(例えば、地磁気センサ、ガスレートジャイロ等の方位センサやクランクシャフトの回転数等を検地する速度センサなど。)を使用する必要があり、移動体に設置されている自立センサから情報が取れないシステムにおいては、測位精度を向上させることは困難である場合が多い。
【0005】
そこで、本発明の目的は、2つ以上のGPSセンサを用いて、位置測位精度を向上することができる位置測位システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、例えば特許請求の範囲に記載の構成を採用する。
本願は上記課題を解決する手段を複数含んでいるが、その一例を挙げるならば、GPS衛星からのGPS衛星信号を受信する複数のアンテナと、複数のアンテナのうち対応するアンテナからのGPS衛星信号を受信し、位置情報及びDOP値を出力する複数のGPS衛星信号処理部と、複数のGPS衛星信号処理部のうち、最も小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力する位置情報出力部と、を備えたことを特徴とする位置測位システムである。
【発明の効果】
【0007】
本発明によれば、2つ以上のGPSセンサを用いて、位置測位精度を向上することができる位置測位システムを提供することができる。
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0008】
【図1】本実施例の構成概略図の例である。
【図2】本実施例を適用するシステムの機器構成図の例である。
【図3】本実施例を適用するシステム図を示す例である。
【図4】本実施例の処理を説明するフローチャートの例である。
【発明を実施するための形態】
【0009】
以下、実施例を図面を用いて説明する。
【実施例1】
【0010】
本実施例では、2台のGPSセンサを利用し誤差を低減した位置情報を算出する位置測位システムについて説明する。
図1は、本実施例の位置測位システムの構成を説明するための図である。位置測位システムの位置測位の対象は位置算出対象物100である。図1に示すように、本実施例の位置測位システムは、この位置算出対象物100を対象として利用されるものであり、位置GPSアンテナ211・212と、このGPSアンテナが受信するGPS衛星信号を受信して処理する図示しないGPSセンサ201・202を備えている。AはGPSアンテナ間の距離を示す。
【0011】
図2は、本実施例の位置測位システムのシステム構成の例を示す図である。GPSアンテナ211・212はそれぞれGPS衛星からのGPS衛星信号を受信する。GPSアンテナが受信したGPS衛星信号はそれぞれGPSセンサ201・202に送られて処理される。このGPSセンサにおいてGPS衛星信号が処理されることにより、測位データが得られる。この測位データには、GPSアンテナの位置を示す位置情報や、GPSアンテナの速度を示す速度情報、あるいはGPSアンテナの進行角の情報が得られる。
【0012】
さらに測位データには、DOP(Dilution Of Precision)値が含まれている。一般的にGPS衛星信号による位置測位の精度は、GPS衛星の配置状態に大きく影響し、例えば、4つのGPS衛星がほとんど同じ方向にあると精度は劣化し、平均的に広がって配置されていると向上する。 この各GPS衛星の配置を示す値がDOP値であり、DOP値が低い程、位置測位の精度は高く、DOP値が大きくなると、位置測位精度は低くなる。DOP値が1〜5程度であれば、測位は可能であるが、DOP値が10を超えると測位の精度はかなり落ちるものである。
【0013】
本実施例の位置測位システムにおいては、GPSセンサ201・202において処理されて出力された信号、すなわち上記した測位データの信号を演算部301において受信して図4に示すフローチャートの処理を行う。なお、図2に図示されていないが、演算部301で算出した位置情報を表示する表示部を備えていてもよい。
【0014】
図3は、本実施例の位置測位システムを適用例を説明するための図である。GPSアンテナ211からのGPS衛星信号は図示しないGPSセンサ201により処理されて測位データ221を出力し、同様にGPSアンテナ212からのGPS衛星信号は図示しないGPSセンサ202により処理されて測位データ222を出力する。GPS衛星からの電波の反射や遮蔽などの原因により、測位データ221が示すような実際のGPSアンテナの位置情報と測位データに基づく位置情報とに大きな誤差が生じることがある。一方で測位データ212から求まる位置情報はGPSアンテナの位置情報をおよそ正確に示している。このように本実施例では、GPSセンサを2台使用することで、自立センサや固定基準局を必要としない普及型の単独測位方式において、測位データよりアンテナ間距離と進行角を監視し処理することにより誤差を低減した位置算出システムを提供する。
【0015】
本実施例においては、測位データ221のように、測位データに基づく位置情報に正確な位置情報との大きな誤差が生じた場合であっても実際の位置情報に近い正確な位置測位を行うために、2つのGPSアンテナ211・212、及び、GPSセンサ201・201を備え、これらを用いて位置測位を行うものである。すなわち、図2の演算部301により図4に示すフローチャートの処理を行い、より正確な位置測位を行う。
【0016】
図4は、演算部301の処理フローを説明するための図である。演算部301はGPSセンサ201・202からそれぞれ測位データ221・222を受信して以下に説明する処理を行うことで、算出した位置情報を出力する。演算部301により位置情報の算出を開始すると、まずS01で速度判定部によりGPSアンテナが移動しているか否かを判断する。この判断はGPSアンテナ211・212の何れの測位データ221・222に基づいて行ってもよい。
【0017】
処理ステップS01で移動していると判断した場合には、処理ステップS03でアンテナ間距離判定部により、GPSアンテナ211と212との間のアンテナ間距離αを算出する。アンテナ間距離判定部は測位データ221と222の位置情報からアンテナ間距離αを算出し、さらに設置実距離Aと比較し、どちらが大きいか判断する。設置実距離A>算出距離αの場合には、処理ステップS07へ移行する。処理ステップS07では、進行角判定部により測位データ221・222のそれぞれから求まる進行角差βを算出し、この進行角差βが予め設定された規定値内かどうか判断する。
【0018】
処理ステップS07おいて進行角β<規定値の場合には、2台のGPSアンテナ211と212が同じ方向へ移動していることを判別することができ、これにより、それぞれの測位データに大きな誤差がないことを判別することができ。この場合には、演算部301は処理ステップS10に移行して測位データ221と222からそれぞれ求まる位置情報の中間点(平均値)を算出して出力する。この処理ステップS10より、2台のGPSセンサの測位データ221と222に含まれるそれぞれの誤差量を低減させ、より測位精度の良好な位置情報を算出することが可能となる。
【0019】
一方で、処理ステップS07で、算出した進行角β>規定値の場合にはそれぞれのGPSアンテナ211・212が異なる方向に進んでいることが分かるため、一方の測位データに大きな誤差があることと判断できる。この場合には、処理ステップS11へ移行し、GPSセンサ201と202から得られる測位データ221と222のDOP値を比較する。DOP値の低い測位データの方が測位精度が高いため、処理ステップS11ではDOP値の低い測位データを選択して、この測位データから求まる位置情報として算出し出力する。この処理ステップS11より、一方の測位データに大きな誤差が生じた場合であっても測位精度の良好なデータを利用することで位置測位精度を向上することが可能となる。
【0020】
また、処理ステップS03へ戻り、アンテナ間距離判定部により設置実距離A<算出距離αと判断した場合には、処理ステップS06へ移行する。この場合にも同様に一方の測位データに大きな誤差があることが考えられるため、処理ステップS06において処理ステップS11と同様にDOP値の低い測位データを選択して、この測位データから求まる位置情報を算出結果として出力する。これにより一方の測位データに大きな誤差が生じた場合であっても、測位精度を向上することが可能となる。
【0021】
また、処理ステップS01へ戻り、位置算出対象物が静止している場合、処理ステップS02へ移行する。処理ステップS02は、処理内容は上記の処理ステップS11と同様となる。
【0022】
以上に説明したように、本実施例の位置測位システムは、GPS衛星からのGPS衛星信号を受信する複数のアンテナ(211・212)と、複数のアンテナのうち対応するアンテナからのGPS衛星信号を受信し、位置情報及びDOP値を出力する複数のGPS衛星信号処理部(201・202)と、複数のGPS衛星信号処理部(201・202)のうち、最も小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力する位置情報出力部(301)と、を備えたことを特徴とするものである。またこの場合において以下の態様であることが望ましい。
(1)位置情報出力部(301)は、2つのGPS衛星信号処理部(201・202)から出力される位置情報の差が設定距離以上であった場合に、2つのGPS衛星信号処理部(201・202)のうち小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力すること。
(2)位置情報出力部(301)は、2つのGPS衛星信号処理部(201・202)から出力される位置情報の差が設定距離より低い場合に、2つのGPS衛星信号処理部(201・202)から出力される位置情報の平均値を出力すること。
(3)複数のGPS衛星信号処理部(201・202)は、対応するアンテナにより受信されたGPS衛星信号に基づいて算出した進行角を出力し、位置情報出力部(301)は、2つのGPS衛星信号処理部(201・202)から出力される位置情報の差が設定距離より低い場合で、かつ、2つのGPS衛星信号処理部(201・202)から出力される進行角の差が設定角より低い場合に、2つのGPS衛星信号処理部(201・202)から出力される位置情報の平均値を出力すること。
(4)位置情報出力部(301)は、2つのGPS衛星信号処理部(201・202)から出力される位置情報の差が前記設定距離より低い場合で、かつ、2つのGPS衛星信号処理部(201・202)から出力される進行角の差が前記設定角以上の場合に、2つのGPS衛星信号処理部(201・202)のうち小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力すること。
【0023】
なお、本発明は上記した実施例に限定されるものではなく、様々な変形例が含まれる。例えば、上記した実施例は本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施例の構成の一部を他の実施例の構成に置き換えることが可能であり、また、ある実施例の構成に他の実施例の構成を加えることも可能である。また、各実施例の構成の一部について、他の構成の追加・削除・置換をすることが可能である。
【0024】
また、上記の各構成、機能、処理部、処理手段等は、それらの一部又は全部を、例えば集積回路で設計する等によりハードウェアで実現してもよい。また、上記の各構成、機能等は、プロセッサがそれぞれの機能を実現するプログラムを解釈し、実行することによりソフトウェアで実現してもよい。各機能を実現するプログラム、テーブル、ファイル等の情報は、メモリや、ハードディスク、SSD(Solid State Drive)等の記録装置、または、ICカード、SDカード、DVD等の記録媒体に置くことができる。
【0025】
また、制御線や情報線は説明上必要と考えられるものを示しており、製品上必ずしも全ての制御線や情報線を示しているとは限らない。実際には殆ど全ての構成が相互に接続されていると考えてもよい。
【符号の説明】
【0026】
100 位置算出対象物
201、202 GPSセンサ
211、212 GPSアンテナ
221、222 GPS測位データ
231 位置算出結果
301 演算部
A アンテナ設置間距離
α アンテナ算出距離
S01〜S13 処理ステップ
【特許請求の範囲】
【請求項1】
GPS衛星からのGPS衛星信号を受信する複数のアンテナと、
該複数のアンテナのうち対応するアンテナからのGPS衛星信号を受信し、位置情報及びDOP値を出力する複数のGPS衛星信号処理部と、
該複数のGPS衛星信号処理部のうち、最も小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力する位置情報出力部と、
を備えたことを特徴とする位置測位システム。
【請求項2】
GPS衛星からのGPS衛星信号を受信する2つのアンテナと、
該2つのアンテナのうち対応するアンテナからのGPS衛星信号を受信し、位置情報及びDOP値を出力する2つのGPS衛星信号処理部と、
該2つのGPS衛星信号処理部のうち、小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力する位置情報出力部と、
を備えたことを特徴とする位置測位システム。
【請求項3】
請求項2に記載の位置測位システムにおいて、
前記位置情報出力部は、
前記2つのGPS衛星信号処理部から出力される位置情報の差が設定距離以上であった場合に、前記2つのGPS衛星信号処理部のうち小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力することを特徴とする位置測位システム。
【請求項4】
請求項3に記載の位置測位システムにおいて、
前記位置情報出力部は、
前記2つのGPS衛星信号処理部から出力される位置情報の差が前記設定距離より低い場合に、前記2つのGPS衛星信号処理部から出力される位置情報の平均値を出力することを特徴とする位置測位システム。
【請求項5】
請求項2に記載の位置測位システムにおいて、
前記複数のGPS衛星信号処理部は、
対応するアンテナにより受信されたGPS衛星信号に基づいて算出した進行角を出力し、
前記位置情報出力部は、
前記2つのGPS衛星信号処理部から出力される位置情報の差が設定距離より低い場合で、かつ、前記2つのGPS衛星信号処理部から出力される進行角の差が設定角より低い場合に、前記2つのGPS衛星信号処理部から出力される位置情報の平均値を出力することを特徴とする位置測位システム。
【請求項6】
請求項5に記載の位置測位システムにおいて、
前記位置情報出力部は、
前記2つのGPS衛星信号処理部から出力される位置情報の差が前記設定距離より低い場合で、かつ、前記2つのGPS衛星信号処理部から出力される進行角の差が前記設定角以上の場合に、前記2つのGPS衛星信号処理部のうち小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力することを特徴とする位置測位システム。
【請求項1】
GPS衛星からのGPS衛星信号を受信する複数のアンテナと、
該複数のアンテナのうち対応するアンテナからのGPS衛星信号を受信し、位置情報及びDOP値を出力する複数のGPS衛星信号処理部と、
該複数のGPS衛星信号処理部のうち、最も小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力する位置情報出力部と、
を備えたことを特徴とする位置測位システム。
【請求項2】
GPS衛星からのGPS衛星信号を受信する2つのアンテナと、
該2つのアンテナのうち対応するアンテナからのGPS衛星信号を受信し、位置情報及びDOP値を出力する2つのGPS衛星信号処理部と、
該2つのGPS衛星信号処理部のうち、小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力する位置情報出力部と、
を備えたことを特徴とする位置測位システム。
【請求項3】
請求項2に記載の位置測位システムにおいて、
前記位置情報出力部は、
前記2つのGPS衛星信号処理部から出力される位置情報の差が設定距離以上であった場合に、前記2つのGPS衛星信号処理部のうち小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力することを特徴とする位置測位システム。
【請求項4】
請求項3に記載の位置測位システムにおいて、
前記位置情報出力部は、
前記2つのGPS衛星信号処理部から出力される位置情報の差が前記設定距離より低い場合に、前記2つのGPS衛星信号処理部から出力される位置情報の平均値を出力することを特徴とする位置測位システム。
【請求項5】
請求項2に記載の位置測位システムにおいて、
前記複数のGPS衛星信号処理部は、
対応するアンテナにより受信されたGPS衛星信号に基づいて算出した進行角を出力し、
前記位置情報出力部は、
前記2つのGPS衛星信号処理部から出力される位置情報の差が設定距離より低い場合で、かつ、前記2つのGPS衛星信号処理部から出力される進行角の差が設定角より低い場合に、前記2つのGPS衛星信号処理部から出力される位置情報の平均値を出力することを特徴とする位置測位システム。
【請求項6】
請求項5に記載の位置測位システムにおいて、
前記位置情報出力部は、
前記2つのGPS衛星信号処理部から出力される位置情報の差が前記設定距離より低い場合で、かつ、前記2つのGPS衛星信号処理部から出力される進行角の差が前記設定角以上の場合に、前記2つのGPS衛星信号処理部のうち小さいDOP値を出力するGPS衛星信号処理部から出力された位置情報を出力することを特徴とする位置測位システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−225769(P2012−225769A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−93604(P2011−93604)
【出願日】平成23年4月20日(2011.4.20)
【出願人】(502129933)株式会社日立産機システム (1,140)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年4月20日(2011.4.20)
【出願人】(502129933)株式会社日立産機システム (1,140)
【Fターム(参考)】
[ Back to top ]