
位置測位装置、および位置測位方法
【課題】車両に搭載されるシステムにおいて、高精度に現在位置を算出する。
【解決手段】位置測位システムに、道路標示を示すパターン情報と、パターン情報に対応付けられた道路標示の特徴点をワールド座標で示した位置情報とを登録する道路標示情報DB105と、車両の暫定現在位置を算出する測位処理部103と、車両の前方を撮像する車載カメラ107と、撮影した画像および道路標示情報DB105に登録されているパターン情報を用いて撮影した画像の中に道路標示が在るか否かを判定し、画像の中にある道路標示の特徴点を抽出する画像処理部104と、車両を基準に特徴点の座標を算出し、車両を基準にした特徴点の座標、および道路標示情報DB105の中の抽出した特徴点に対応する特徴点の位置情報を用いて現在位置を算出する位置計算部102と、を設ける。
【解決手段】位置測位システムに、道路標示を示すパターン情報と、パターン情報に対応付けられた道路標示の特徴点をワールド座標で示した位置情報とを登録する道路標示情報DB105と、車両の暫定現在位置を算出する測位処理部103と、車両の前方を撮像する車載カメラ107と、撮影した画像および道路標示情報DB105に登録されているパターン情報を用いて撮影した画像の中に道路標示が在るか否かを判定し、画像の中にある道路標示の特徴点を抽出する画像処理部104と、車両を基準に特徴点の座標を算出し、車両を基準にした特徴点の座標、および道路標示情報DB105の中の抽出した特徴点に対応する特徴点の位置情報を用いて現在位置を算出する位置計算部102と、を設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、現在位置を算出するための技術に関し、特に車両に搭載された位置測位装置の技術に関する。
【背景技術】
【0002】
従来から、車両の現在位置を算出する方法として、ジャイロや地磁気センサ等のセンサから取得した情報を利用する方法(自律航法)、GPS(Global Positioning System)衛星からの信号を利用する方法、或いは、GPSと自律航法とを組合せたハイブリット方法等が知られている。これらの現在位置算出方法は、いずれも、測位誤差が生じるという問題を有している。
【0003】
自律航法やGPSを利用して求めた現在位置の誤差を補正するための手法が特許文献1に提案されている。特許文献1では、カメラが撮影した車両の前方の対象物の画像を利用して現在位置を補正するようにしている。具体的には、特許文献1には、カメラからの画像と、センサ等からの情報とを利用して2地点間の距離と各地点における同一対象物への仰角とに基づき、移動後の地点から対象物までの距離を計算し、その距離を用いて自車位置を補正するナビゲーション装置が開示されている。なお、特許文献1では、対象物として信号機などが想定されている。
【0004】
また、特許文献2には、カメラで撮影された車両の周辺画像から得られた特徴点と、予め保持している地図情報とを比較し、その比較結果に基づいて車両の現在位置を修正する技術が開示されている。なお、特徴点としては、交差点の標識や信号機等を利用するようにしている。
【0005】
【特許文献1】特許第3381312号公報
【特許文献2】特開平9−152348号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1は、以下の問題を有している。具体的には、特許文献1の技術により現在位置を補正する場合、車両の走行中に、先ず、任意の地点で信号機等の対象物に対する仰角を求め、その後、車両がある距離を走行してから再び同じ対象物に対する仰角を求める必要がある。つまり、特許文献1では、移動しながら仰角や距離の変化を求めて位置を補正するため、ある程度の距離を走行しない限り位置補正ができない。すなわち、特許文献1では、車両が停止中の場合に現在位置を補正することができないという問題を有している。
【0007】
また、特許文献1は、上記の2地点と対象物とが一直線上に並んでいることを前提としている。しかし、実際の道路では、2地点と対象物とが一直線上に並ぶことは稀であるため、現在位置を正確に補正できないことが多い。すなわち、特許文献1の技術は、実際の道路での利用は困難であると考えられる。
【0008】
また、特許文献2では、現在位置の補正に利用するための特徴点が交差点近傍に配置されているものに限定されているため、交差点がほとんど存在しない高速道路などでは適用が困難であるという問題を有している。すなわち、特許文献2では、車両が存在する位置によっては、測位した現在位置の誤差を補正できないことがあるという問題を有している。さらに、特許文献2では、特徴点までの距離がその対象物の画像中における大きさに基づいて計算されているため、画像の解像度によっては、正確な距離が算出できない可能性がある。
【0009】
本発明は、上記事情に鑑みてなされたものであり、本発明の目的は、位置を測位するシステムにおいて、高精度に現在位置を算出することにある。
【課題を解決するための手段】
【0010】
上記課題を解決するため、本発明の一態様は、車両に搭載されている位置測位装置に適用される。
【0011】
そして、前記位置測位装置は、道路標示を示すパターン情報と、該パターン情報に対応付けられた道路標示の特徴点をワールド座標系で示した位置情報(特徴点のワールド座標)とが登録されている道路標示情報を記憶する手段と、測位衛星からの信号および各種センサからの信号を利用して車両の位置をワールド座標系で示した暫定現在位置を算出する手段と、車両の前方を撮影する撮像手段と、前記撮像手段が撮影した画像および前記道路標示情報に登録されているパターン情報を用いて、該撮影した画像の中に道路標示が在るか否かを判定し、前記画像の中に前記道路標示が在ると判定した場合、該画像の中にある道路標示の特徴点を抽出し、前記暫定現在位置を基準にした座標系(自動車座標系)における特徴点の座標(自動車座標系特徴点)を算出する抽出手段と、前記算出した暫定現在位置および前記道路標示情報を用いて、前記道路標示情報に登録されている道路標示の特徴点の中から前記抽出した特徴点に対応する道路標示の特徴点のワールド座標を特定する特定手段と、前記算出した自動車座標系特徴点と、前記特定した特徴点のワールド座標と、予め定められている前記ワールド座標系と前記自動車座標系との対応関係と、を用いて、該ワールド座標系で示した車両の現在位置を算出する手段と、を有する。
【発明の効果】
【0012】
このように本発明では、測位衛星からの信号等を利用して暫定的な現在位置を求めておいて、撮影された車両前方の画像を用いて、暫定現在位置を基準にした座標系(自動車座標系)における道路標示の特徴点の座標(自動車座標系特徴点)を算出するようにしている。そして、算出した自動車座標系特徴点と、記憶している道路標示の特徴点の座標(ワールド座標系で示した座標)とを用いて、車両の現在位置を算出するようにしている。そのため、本発明によれば、測位衛星からの信号および各種センサからの信号による測位では誤差を含んでしまう場合であっても、精度の高い現在位置を算出することができる。
【0013】
また、本発明では、道路上の特徴点の座標を求め、それらの座標を用いて自車位置を算出するため、任意の場所において精度の高い自車位置の算出が可能となる。また、本発明によれば、車両が走行中であるか、あるいは停車中であるかによらず、正確な自車位置の算出が可能となる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施形態について図面を用いて説明する。
【0015】
先ず、本実施形態の概略構成について、図1を用いて説明する。
【0016】
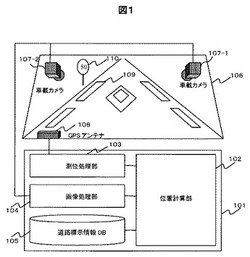
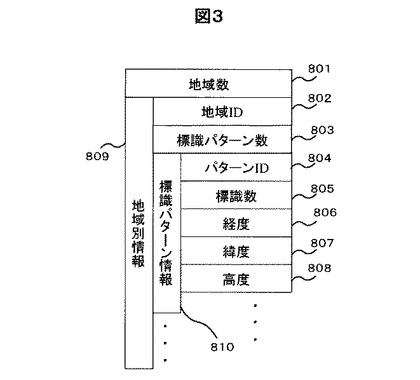
図1は、本発明の実施形態が適用された位置測位システムの機能構成を説明するための図である。なお、図1には、車両の運転席から見える景色の例を示している。
【0017】
図示するように、本実施形態の位置測位システムは、ナビゲーション装置101と、車両の前方を撮像する車載カメラ107−1、2とを有する。なお、ナビゲーション装置101には、GPS(Global Positioning System)衛星から送信されたGPS信号を受信するGPSアンテナ108と、ジャイロ902や車速センサ903等の各種センサ(図2参照)と、が接続されている。
【0018】
車載カメラ107−1、2は、フロントガラス106のすぐ後ろに設置されている。なお、図1では、車載カメラ107−1が車両の中心から見て右側に配置されていて、車載カメラ107−2が車両の中心から見て左側に配置されていている場合を例示している。また、フロントガラス106越しには、通常の場合(車両が道路上にいる場合)であれば、標識110や道路上に引かれた道路標示(例えば、白線109)が見えている。そして、車載カメラ107−1、2は、車両の前方の標識110および道路上に引かれた道路標示(例えば、白線109)を撮影できるように設置されているものとする。また、GPSアンテナ108は、例えば、ダッシュボード上か車の屋根等に設置されている。
【0019】
ナビゲーション装置101は、GPSアンテナ108が受信するGPS信号等を利用して暫定的な現在位置(暫定現在位置)を算出し、さらに車載カメラ107−1、2が撮影した車両前方の画像情報および暫定現在位置を利用して車両の現在位置を特定する。具体的には、ナビゲーション装置101は、位置計算部102、測位処理部103、画像処理部104、および道路標示情報DB105を有する。道路標示情報DB105には、道路標識110や白線109を示すパターン情報、その位置情報等が格納されている(図3参照)。
【0020】
測位処理部103は、GPSアンテナ108が受信したGPS信号と、ジャイロ902および車速センサ903からの信号とを利用して車両の暫定現在位置を算出する。画像処理部104は、車載カメラ107−1、107−2がそれぞれ撮影した画像情報に所定の処理(所定の処理については後段で詳細に説明する)を行い、処理結果を位置計算部102に出力する。位置計算部102は、道路標示情報DB105に格納されている情報および画像処理部104の処理結果と、測位処理部103が算出した暫定現在位置とを用いて、車両の現在位置を算出する。なお、測位処理部103が行う、暫定的な現在位置を算出する処理は、従来技術により実現されるものとする。
【0021】
続いて、本実施形態の位置測位システムのハードウェア構成を説明する。
【0022】
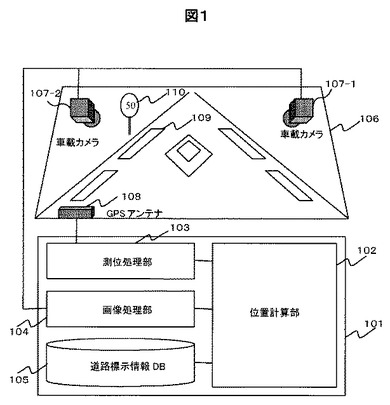
図2は、本発明の実施形態の位置測位システムのハードウェア構成を説明するための図である。
【0023】
図示するように、ナビゲーション装置101は、上述した位置計算部102、測位処理部103、および画像処理部104の機能を実現する情報処理装置905と、車両の現在位置を地図上に示した画像等(ナビ画面)を表示する表示装置901と、地図情報(図示しない)および道路標示情報DB105を記憶する記憶装置906と、GPS受信装置904と、を有する。
【0024】
情報処理装置905には、各種の処理を実行するCPU910と、メモリ911と、表示装置901や記憶装置906等の装置との間のデータ送受信を制御するI/OIF912とを有するコンピュータを用いることができる。メモリ911には、位置計算部102、測位処理部103、および画像処理部104の機能を実現するためのプログラム(ナビゲーションプログラム)が記憶されている。そして、位置計算部102、測位処理部103、および画像処理部104の機能は、CPU910がメモリ911に記憶されたナビゲーションプログラムを実行することにより実現される。
【0025】
また、記憶装置906には、例えば、CDおよびCDドライブ、DVDおよびDVDドライブ、HDDなどが使われる。表示装置901には、液晶ディスプレイ、CRT等を用いることができる。
【0026】
GPS受信装置904は、GPSアンテナ108を介してGPS信号を受信し、車両とGSP衛星間の距離および距離の変化率を3個以上の衛星に対して測定することで車両の位置(緯度、経度、高度)、進行方向および進行方位を測定し、測定結果を情報処理装置905に出力する。
【0027】
ジャイロ902には、光ファイバジャイロや振動ジャイロを用いることができ、車両が回転した角度を検出し、検出結果を情報処理装置905に出力する。車速センサ903は、車両の速度を検知し、検知した速度を情報処理装置905に出力する。
【0028】
また、必要に応じて、ナビゲーション装置101に通信モジュール907を接続するようにしてもよい。通信モジュール907は、例えば、記憶装置906に格納されている情報を更新するためにサーバと通信するために用いられる。
【0029】
続いて、道路標示情報DB105のデータ構造について説明する。
【0030】
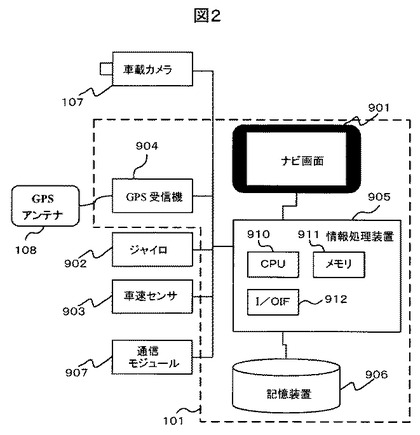
図3は、本実施形態の道路標示情報DB105のデータ構造を模擬的に示す図である。なお、図3では、日本全国を地域に分割し、地域ごとに情報を管理する場合を例示している。
【0031】
道路標示情報DB105は、日本全国に存在する地域の数を示す「地域数」を登録するためのフィールド801と、フィールド801に登録した「地域数」に対応付けて「地域別情報」を登録するためのフィールド809と、を備える。なお、道路標示情報DB105には、「地域数」の分だけ「地域別情報」が登録されている。
【0032】
「地域別情報」は、「地域ID」、「標識パターン数」、および「標識パターン情報」から構成されている。「地域ID」とは、地域毎に割り振られたIDである。「標識パターン数」は、「標識パターン」の数を示している。なお、「標識パターン」とは、道路上の白線の特徴点(例えば、白線の端部)であったり、「止まれ」等の道路標識であったりする。そして、フィールド809には、「地域ID」を登録するためのフィールド802と、「標識パターン数」を登録するためのフィールド803と、「標識パターン情報」を登録するためのフィールド810と、が対応付けられている。
【0033】
また、フィールド810に登録される「標識パターン情報」は、「パターンID」、「標識数」、「経度」、および「緯度」から構成されている。「パターンID」は、標識パターン毎に割り振られたIDである。「標識数」は、標識パターンごとの登録標識数である。「経度」、「緯度」、「高度」は、標識が存在する場所を示す。そして、「標識パターン情報」を登録するためのフィールド810には、「パターンID」を登録するためのフィールド804と、「標識数」を登録するためのフィールド805と、「経度」を登録するためのフィールド806と、「緯度」を登録するためのフィールド807と、「高度」を登録するためのフィールド808と、が対応付けられている。なお、道路標示情報DB105に登録される「経度」、「緯度」、「高度」は、測位処理部103が求める暫定的な現在位置や地図情報(図示しない)と同じ座標系(ワールド座標系)で示されている。
【0034】
「標識パターン」によっては、「経度」、「緯度」、「高度」の組合せが複数存在する。そのため、例えば、白線の場合は、その白線の両端点を登録したり、横断歩道であれば対角の2点を登録したりする。
【0035】
ところで、道路標示情報DB105に登録されている情報の内容は、日々に変化するものである。例えば、道路工事によって車線の位置が変わることは日常的である。また、新たな標識や看板の設置もよく行われる。したがって、道路標示情報DB105については、情報を更新する仕掛けが設けられていることが望ましい。
【0036】
道路標示情報DB105を更新するには、記憶装置906を交換したり書き換えたりする。記憶装置906がCDドライブおよびCD(DVDドライブおよびDVD)で構成されている場合には、CD(DVD)を交換することにより道路標示情報DB105の内容を更新する。また、記憶装置906がHDDの場合は書換えが可能である。そのため、例えば、店舗で書き換えたり、通信モジュール907(図2参照)を用いてサーバからダウンロードしたりすることが可能である。
【0037】
サーバの情報については、提供業者が日本全国を常時調査して更新することとしてもよいし、或いは、各車両から標識情報をサーバにアップロードしてもらうことにしてもよい。なお、各車両からのアップロードには、通信モジュール907を用いればよい。また、通信モジュール907に携帯電話を用いてもよい。携帯電話を用いる場合、ナビゲーション装置101との接続は、専用のハーネスを用いたり、Bluetooth(登録商標)などのワイヤレス通信技術を用いたりできる。
【0038】
続いて、本実施形態の位置測位システムが行う現在位置算出処理について、図4を用いて説明する。
【0039】
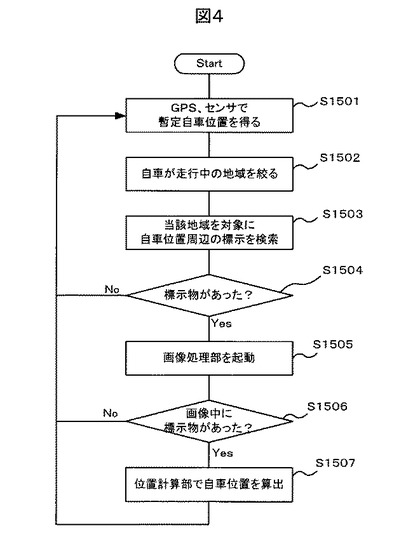
図4は、本発明の実施形態の位置測位システムが行う現在位置算出処理のフローを説明するための図である。
【0040】
先ず、位置計算部102は、車両の暫定的な現在位置(暫定自車位置)を取得する(S1501)。ところで、自車位置は、ナビゲーション装置101を車に設置して最初の起動の際、測位処理部103がGPS受信機904およびジャイロ902等のセンサからの情報を利用して車両の位置を測位し、ナビゲーション装置101の内部に保存される。以降、走行する度に車両の存在する位置は変化するが、その都度、測位処理部103により測位されてカーナビ101内部に保存される。本ステップ(S1501)で取得する暫定自車位置は、ナビゲーション装置101に保存してある自車位置のことである。
【0041】
次に、位置計算部102は、S1501で取得した暫定自車位置をキーにして、道路標示情報DB105から、取得した暫定自車位置周辺(例えば、暫定自車位置から所定距離の範囲)の道路標示情報を検索する(S1502)。その際、位置計算部102は、自車が走行中の地域(車両が停止している場合には、自車が位置する地域)を特定する。これは、道路標示情報DB105の全体を常に検索することを避け、処理時間を短縮するためである。したがって、本ステップ(S1502)を行わないようにしてもよい。なお、本ステップでは、車両の進行方向にある地域だけを特定するようにしてもよい。
【0042】
次に、位置計算部102は、S1501で取得した暫定自車位置、およびS1502で特定した地域をキーにして道路標示情報DB105から、暫定自車位置周辺の道路標示情報を検索する(S1503)。位置計算部102は、検索した結果、標示情報(道路標示や道路標識等)があるかどうかを判定し(S1504)、標示情報があれば画像処理部104を起動し(S1505)、無ければ再びS1501に戻る。
【0043】
画像処理部104は、車載カメラ107からの画像を取得し、取得した画像および道路標示情報DB105を用いて所定の処理(画像処理部105が行う処理内容は、以降で詳細に説明する)を行う。画像処理部104は、車載カメラ107から取得した画像中に、上記で検索した標示情報があるか否かを判定する(S1506)。具体的には、画像処理部104は、取得した画像の中に検索した標示情報の標識パターン情報(図3参照)があるか否かを判定し、標示情報があればS1507に進み、無ければ再びS1501に戻る。なお、車載カメラ107から取得した画像中に標示情報があるか否かは、既存の画像処理技術(パターンマッチング等)により実現されるものとする。
【0044】
S1507では、位置計算部102は、画像処理部104の画像処理結果と、S1501で取得した暫定自車位置を基にして、新たに自車位置を計算する。
【0045】
そして、ナビゲーション装置101は、新たに算出した自車位置を利用して、自車位置周辺の地図上にその自車位置を表示するナビ画面を生成し、表示装置901に表示する。また、ナビゲーション装置101は、新たに算出した自車位置から目的地までの経路探索をしたり、或いは、利用者を目的地まで誘導する処理を行う。なお、S1504で標示情報が無いと判定された場合であっても、自車位置をナビ画面に表示する必要がある。その場合には、暫定現在位置を現在位置としてナビ画面に表示する。
【0046】
このように、本実施形態では、常に画像処理部104で画像処理を実行するのではなく、自車位置周辺に道路標示が存在する場合にだけ、画像処理を実行するようにしている。このようにすることで、画像処理部104の負荷を減らすことが可能になる。もちろん、常に画像処理を実行することにしてもよい。
【0047】
続いて、本実施形態のナビゲーション装置101の位置計算部102が行う測位処理のアルゴリズムについて、図5を用いて説明する。
【0048】
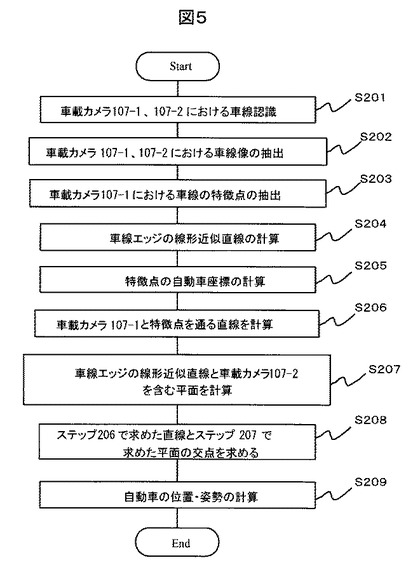
図5は、本発明の実施形態の測位アルゴリズムを説明するための図である。なお、図示するアルゴリズムは、図6に示す複数の座標系を用いることを前提としている。そのため、図5の説明の前に、本実施形態で利用する座標系を説明する。
【0049】
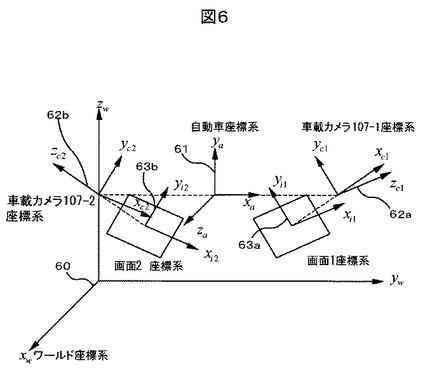
図6に示すように、本実施形態では、ワールド座標系60、自動車座標系61、カメラ座標系62a、b、および画面座標系63a、bが利用される。なお、道路標示情報DB105の中で定義されている位置情報(経度、緯度、高度)は、ワールド座標系60で定義されている。また、記憶装置906に記憶されている地図情報の位置もワールド座標系60で定義されている。
【0050】
図中の(xw,yw,zw)は、ワールド座標系60の座標を示し、(xa,ya,za)は、車両の自車位置を基準にした自動車座標系61の座標を示す。(xcj,ycj,zcj)は、車載カメラ107を基準にしたカメラ座標系62の座標を示し、(xij,yij)は、車載カメラ107が撮影した画像の画面座標系63の座標を示している。そして、ワールド座標系60、自動車座標系61、カメラ座標系62、及び画面座標系63間の座標変換は、以下に示す式(式1)〜(式3)で表され、各座標系が関連付けられている。なお、自動車の停車中は、各座標系の関係は変わらないが、走行すると各座標系の関係は変化する。また、(式1)〜(式3)の中に示す、「(θawa,θiwa,θtwa)」は、ワールド座標系60における自動車姿勢を示す。「(xwa,ywa,zwa)」は、ワールド座標系60における自動車位置を示す。また、「(θaacj,θiacj,θtacj)」は、自動車座標系61におけるカメラ姿勢を示す。「(xacj,yacj,zacj)」は、自動車座標系61におけるカメラ位置を示す。また、「fcj」は、焦点距離を示す。「mcj」は、倍率を示す。「rcj」は、倍率の縦横比を示す。「j(j=1,2)」は、カメラ番号を示す。また、(式3)において、「exj」、「eyj」は、それぞれ光軸の原点からのずれを表している(なお、これは、0にしてもよい)。
【0051】
【数1】

【0052】
【数2】
【0053】
【数3】
【0054】
また、「Rot(y,θ)」、「Rot(z,θ)」、「Tran(x,y,z)」の定義は、それぞれ(式4)(式5)、(式6)の通りであり、それぞれy軸回りの回転、z軸回りの回転、平行移動である。
【0055】
【数4】
【0056】
【数5】
【0057】
【数6】
【0058】
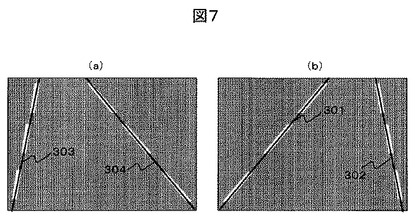
図5に戻り、測位アルゴリズムを説明する。先ず、画像処理部104は、車載カメラ107−1、107−2により撮影された車両前方の道路の画像を取得する。なお、車載カメラ107−1、107−2は、同じタイミングで、車両の前方の道路等(道路および道路周辺にある道路標識)を撮影する。画像処理部104は、取得した画像から道路車線の位置を示す直線を検出する(S201)。この結果は、例えば、図7に示したような車線認識結果となる。図7では、(b)図に、車載カメラ107−1が撮影した画像から車線301、302が抽出された様子を示し、(a)図に車載カメラ107−2が撮影した画像から車線303、304が抽出された様子を示している。
【0059】
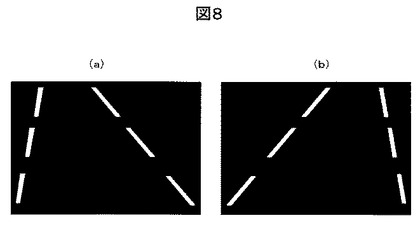
次に、画像処理部104は、画面上の車線の位置を示す直線の近傍において、二値化処理とノイズ除去を行い、車線像を抽出する(S202)。この結果は、例えば図8のようになる。
【0060】
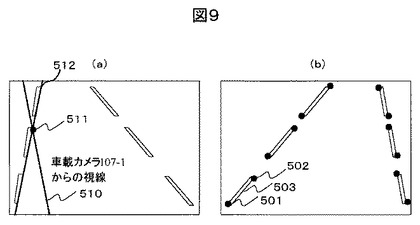
次に、画像処理部104は、車載カメラ107−1から得た画面において、画面下側から車線の切れ目の手前外側と奥内側の点を探索し、それらの点を特徴点とする。この特徴点の探索方法によれば、車線が直線の場合、車線の最も外側の点を探索することにより手前外側の点が抽出でき、最も内側の点を探索することにより奥内側の点が抽出できる(S203)。この処置結果の一例を、図9(b)に示す。図示する例では、車線503に対して、車線の切れ目の手前外側が特徴点501として抽出されていて、奥内側を特徴点502として抽出されている。
【0061】
次に、画像処理部104は、車載カメラ107−2から得た画面において各車線ごとに最も右の画素を抽出し、これらの画素の線形近似直線を求める(S204)。最も右の線形近似直線は、図9(a)の例では、直線512に相当する。同様に、車載カメラ107−2から得た画面において各車線ごとに最も左の画素も抽出し、これらの画素の線形近似直線(図示しない)を求める。画像処理部104は、上記の求めた線形近似直線と、S203で抽出した特徴点とを位置計算部102に出力する。
【0062】
その後、位置計算部102により、車載カメラ107−1の画面上(図6に示す画面1座標系63a)の特徴点Ai1(xilA,yilA)を自動車座標系61(暫定自車位置を基準にした座標系)の座標(xaA,yaA,zaA)に変換する処理が行われる(S205)。すなわち、本ステップにおいて、位置計算部102は、以下に示す(式7)、(式8)を用いて、車載カメラ107−1の画面上の特徴点Ai1(xilA,yilA)を自動車座標(xaA,yaA,zaA)に変換する。なお、特徴点Ai1は、画面上に複数存在する。位置計算部102は、本ステップにおいて、すべての特徴点を自動車座標系で示した値に変換する。
【0063】
具体的には、位置計算部102は、まず、(式7)を用いて、画面座標系である特徴点Ai(xilA,yilA)を、車載カメラ107−1カメラ座標系である特徴点Ac(xclA,yclA,zclA)に変換する。
【0064】
【数7】
【0065】
位置計算部102は、更に、車載カメラ107−1座標系に変換した特徴点Ac(xclA,yclA,zclA)を、式(8)を用いて自動車座標系の座標Aa(xaA,yaA,zaA)に変換する。
【0066】
【数8】
【0067】
続いて、位置計算部102は、特徴点Ai1に対応する自動車座標系の点Aa(xaA,yaA,zaA)と、車載用カメラ107−1の焦点位置を自動車座標系で示した座標(xacl,yacl,zacl)とを通る直線を計算する(S206)。なお、車載用カメラ107−1の自動車座標系での焦点位置は、予め、位置計算部102に設定されているものとする(例えば、本システムを車両に設置する際、設置者が光波測量機によりカメラ107−1の焦点位置を求めて、ナビゲーション装置101に設定しておく)。
【0068】
具体的には、S206では、まず、直線の方程式を以下の(式9)のように定義する。
【0069】
【数9】
【0070】
次に、位置計算部102は、式(9)に特徴点を自動車座標系で示した座標Aa(xaA,yaA,zaA)と、車載カメラ107−1の座標(xacl,yacl,zacl)とを当てはめて変形して、(式10)および(式11)を得る。そして、位置計算部102は、(式10)および(式11)を用いて未知のパラメータを計算する。尚、逆行列は掃出し法やガウスの乗数算出法を用いて算出できる。
【0071】
【数10】
【0072】
【数11】
【0073】
次に、位置計算部102は、以下に示す(式12)、(式13)を用いて、車載カメラ107−2の画面における線形近似直線上の任意の2点「Di2」、「Ei2」を抽出し、自動車座標系に変換する。
【0074】
【数12】
【0075】
【数13】
【0076】
次に、点「Di2」、「Ei2」に対応する自動車座標系の点Da(xaD,yaD,zaD)、Ea(xaE,yaE,zaE)と車載カメラ107−2の焦点位置を自動車座標系で示した位置(xac2,yac2,zac2)を含む平面を計算する(S207)。この平面を以下の(式14)のように定義する。なお、車載用カメラ107−2の自動車座標系での焦点位置は、予め、位置計算部102に設定されているものとする(例えば、本システムを車両に設置する際、設置者が光波測量機によりカメラ107−2の焦点位置を求めて、ナビゲーション装置101に設定しておく)。
【0077】
【数14】
【0078】
この(式14)に点Da(xaD,yaD,zaD)、Ea(xaE,yaE,zaE)、車載カメラ107−2の焦点位置(xac2,yac2,zac2)をそれぞれあてはめ、変形すると以下の(式15)が得られる。未知パラメータは(式15)で計算が可能である。
【0079】
【数15】
【0080】
線形近似直線と車載カメラ107−2を含む平面と、特徴点Ai1の車載カメラ107−1の視線510(すなわち、(式14)のことである)との交点が特徴点Ai1の自動車座標系の対応点Fa(xaF, yaF, zaF)(511)であり、以下の(式16)で計算できる(S208)。(式16)は、(式9)と(式14)とを用いて、直線と平面の交点を求める要領で得られる。
【0081】
【数16】
【0082】
最後に、位置計算部102は、以下の(式17)〜(式23)を用いて、番号kの対応点Fakのワールド座標(xwFk,ywFk,zwFk)と、番号kの対応点Fakの自動車座標(xaFk,yaFk,zaFk)とをもとに自動車の位置(xwa,ywa,zwa)と姿勢(θawa,θiwa,θtwa)を計算する(S209)。
【0083】
なお、「Taw」は、自動車座標をワールド座標に変換するための変換行列であり、以下の(式17)のような関係がある。Fakのワールド座標(xwFk,ywFk,zwFk)は、道路標示情報DB105から得られる。なお、(式17)の中の「XwF」と「XaF」は、以下の(式18)、(式19)で定義する。
【0084】
【数17】
【0085】
【数18】
【0086】
【数19】
【0087】
但し、実際は「XaF」を正方行列に変換して(式17)を実行する必要があるため、「XaF」の転置行列を両辺の右からかけて、(式20)のように変換する。その結果、(式21)が成り立つ。
【0088】
【数20】
【0089】
【数21】
【0090】
自動車の位置と姿勢は、(式22)および(式23)で算出される。なお、自動車座標をワールド座標に変換するための変換行列である「Taw」は、上記(式1)に示した通りで、「Taw=Rot(z,θtwa)・Rot(y,θiwa)・Rot(z,θawa)・Tran(-xwa, -ywa, -zwa)」と表すことができる。そして、(式22)で示す「xwa」、「ywa」、「zwa」は、(式21)の右辺を展開することにより求められる。
【0091】
【数22】
【0092】
【数23】
【0093】
ここで、k(k=1,2,…,m)は、特徴点の番号である。特徴点は、複数存在することがある。また、tawpqは、Tawのp行q列の要素である。
【0094】
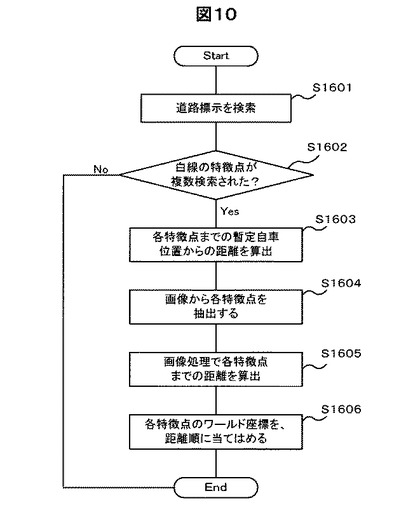
次に、画像から抽出した特徴点が複数存在する場合において、各特徴点のワールド座標を特定する処理について、図10を用いて説明する。
【0095】
図10は、本発明の実施形態の白線の特徴点のワールド座標を特定する処理のフローを説明するための図である。
【0096】
まず、位置計算部102は、道路標示情報DB105を検索する(S1601)。位置計算部102は、検索の結果、白線の特徴点が複数検索されたか否かを判定し(S1602)、特徴点が複数検索された場合にS1603に進み、複数検索されなかった場合に処理を終了する。
【0097】
S1603では、位置計算部102は、検索された特徴点のワールド座標を用いて、暫定自車位置(図4のS1501で得た車両の現在位置)から各特徴点までの距離を算出する(S1603)。
【0098】
次に、画像処理部104により、車載カメラ107により撮影された画像から各特徴点を抽出し(S1604)、撮像された画像に画像処理を行うことにより、車両から抽出した特徴点までの距離を算出する(S1605)。これは、一般の距離画像を求める方法を応用することで算出できる。画像処理部104は、画像処理を用いて算出した抽出した特徴点まで距離を位置計算部102に送信する。
【0099】
最後に、位置計算部102は、S1605で算出した画像から抽出された特徴点までの距離と、S1603で算出した検索された各特徴点から暫定自車位置までの距離と、を用いて、S1604で抽出された各特徴点に対してワールド座標を紐付ける(S1606)。複数の同じ属性を持つ特徴点があっても、このようにして対応できる。
【0100】
なお、本実施形態では、抽出された特徴点に対してワールド座標を紐付ける処理の具体的な手順については特に限定しない。例えば、位置計算部102は、S1604で抽出された特徴点(自動車座標)毎に、S1605で算出した距離を対応付けておく。また、位置計算部102は、S1602で検索された特徴点(ワールド座標)毎に、S1603で求めた距離を対応付ける。そして、位置計算部102は、S1604で抽出された特徴点(自動車座標)に対応付けた距離に一番近い距離に対応付けられたS1602で検索された特徴点(ワールド座標)を特定する。そして、位置計算部102は、S1604で抽出された特徴点(自動車座標)に、S1602で検索された特徴点(ワールド座標)を関連付ける。
【0101】
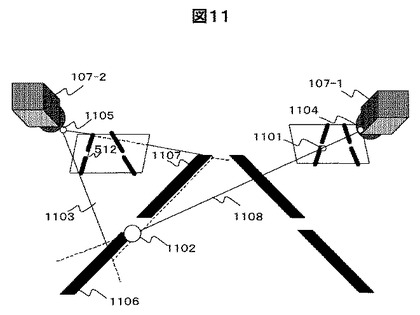
以上に記載した特徴点を抽出するアルゴリズムを、図11を用いて、詳細に説明する。図11は、本発明の実施形態の特徴点を抽出する方法を説明するための概念図である。
【0102】
特徴点1101の座標について考える。まず、特徴点1101の座標を自動車座標系に変換する。また、車載カメラ107−1の焦点1104を自動車座標系に変換する。次に、焦点1104(自動車座標系)と特徴点1101(自動車座標系)を結ぶ直線1108を求める。直線1108は、車載カメラ107−1からの視線510(図9(a)参照)に相当する。直線1108を表しているのが上述した(式9)である。
【0103】
次に、直線512を自動車座標系に変換する。また、車載カメラ107−2の焦点1105と直線512を自動車座標系に変換する。そして、焦点1105と直線512を含む平面1103を求める。平面1103を表しているのが上記の(式14)である。直線512は、車線1106と1107の右エッジである。
【0104】
最後に、直線1108と平面1103との交点1102を求める。交点1102は、(式16)で表される。これらの処理を、画面上の全特徴点に対して実行する。最後に、(式17)〜(式23)を用いて自動車位置と姿勢を求める。
【0105】
以上に記載した本アルゴリズムを用いることによって、GPS単独測位やGPSやジャイロ等を利用した位置測位よりも高精度な位置測位が可能となる。すなわち、本実施形態によれば、精度の高い位置測位を実現することができる。また、本実施形態では、対象物の形状や大きさに依存せずに特徴点の座標を求めているため、2つのカメラが離れていても、2つの画像の対応点を求めることが可能である。したがって、測位精度が向上する。
【0106】
さて、上述したアルゴリズムは、車載カメラ107を2台用いる方法であったが、条件が整えば1台でも実施可能である。その条件とは、道路が平面であることと、カメラの姿勢が変わらない、すなわち、カメラの角度が変わらないことである。
【0107】
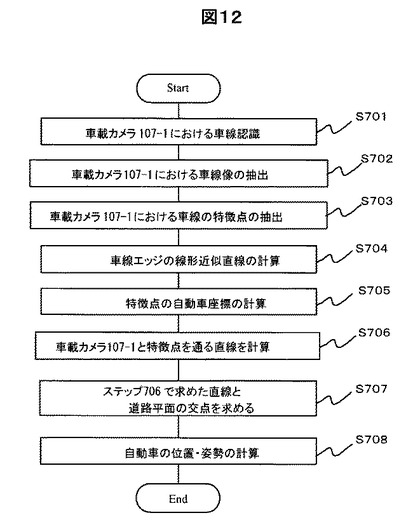
これを実現するアルゴリズムを、図12を用いて説明する。図12は、本発明の実施形態の車載カメラを1台にした場合の位置測位の処理のフローを説明するための図である。
【0108】
先ず、画像処理部104が、車載カメラ107−1が撮影した車両前方の道路の画像を取得する。画像処理部104は、取得した画像から道路車線の位置を示す直線を検出する(S701)。この結果は、例えば、例えば図7(b)に示したような車線認識結果となる。図7(b)は、上述したように、車載カメラ107−1の画像から、車線301と車線302とを抽出した様子を示している。
【0109】
次に、画像処理部104は、車載カメラ107-1が撮影した画面上の車線の位置を示す直線の近傍において、二値化処理とノイズ除去を行い、車線像を抽出する(S702)。この結果は例えば図8(b)のようになる。
【0110】
続いて、車載カメラ107−1の画面において、画面下側から車線の切れ目の手前外側と奥内側の点を探索し、それらの点を特徴点とする。車線が直線の場合、特徴点の探索方法では、車線の最も外側の点を探索することにより手前外側の点が抽出でき、最も内側の点を探索することにより奥内側の点が抽出できる(S703)。この結果は、図9(b)に示したようになる。例えば、車線503に対しては、車線の切れ目の手前外側は特徴点501であり、奥内側は特徴点502である。
【0111】
次に、上述した(式8)を用いて、車載カメラ107−1の画面上の全特徴点Ai1(xilA,yilA)を自動車座標(xaA,yaA,zaA)に変換する(S701)。ここで、(xclA,yclA,zclA)は、「特徴点Ai1」のカメラ座標系(図6の車載カメラ107−1座標系)の座標であり、上述した(式7)で表される。
【0112】
次に、「特徴点Ai1」に対応する自動車座標系の点Aa(xaA,yaA,zaA)と車載カメラ107-1(xacl,yacl,zacl)を通る直線を計算する(S706)。この直線は、(式9)で表され、未知のパラメータは(式10)、(式11)で計算することができる。逆行列は掃出し法やガウスの乗数算出法を用いて算出できる。
【0113】
次に、道路平面とS706で求めた直線との交点を求める(S707)。この交点は、上述した図5のS208で求めた交点に相当する。そして、最後に、位置計算部102は、上述したS209と同様の手順で、自動車の位置(xwa,ywa,zwa)と姿勢(θawa,θiwa,θtwa)を計算する(S708)。
【0114】
このように、カメラ1台であっても、道路平面の方程式が既知であるという制約条件をつけることによって自車位置を求めることができる。
【0115】
また、上記の実施形態で説明した処理の一部を以下のように変更しても、同様の効果を奏することができる。本実施形態の変更例について、図13を用いて説明する。
【0116】
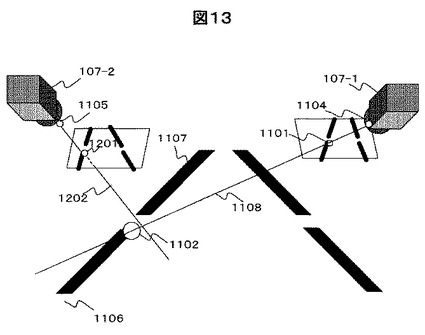
図13は、本発明の実施形態の特徴点を抽出する方法の変形例を説明するための概念図である。
【0117】
図示する、特徴点1201は、特徴点1101に対応している。また、直線1202は、車載カメラ107−2の焦点1105と特徴点1201を結んだ直線である。そして、車載カメラ107−2の焦点1105と車載カメラ107−2で撮影された画像の特徴点1201とを結ぶ直線を求め、上述した直線1108との交点を特徴点とする。この手順により特徴点を求めるこのアルゴリズムを図14に示す。
【0118】
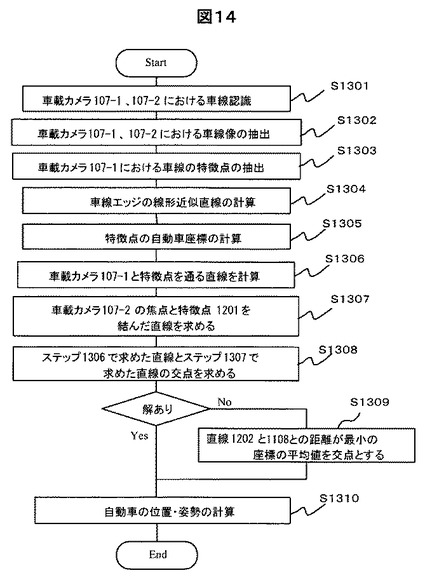
図14は、本発明の実施形態の位置測位システムが行う特徴点を抽出する処理のフローを説明するための図である。図示する処理は、図5に示した処理のうち、S207、S208を、それぞれS1307、1308に変更し、新たにS1309を追加したものである。なお、ここでは、図5の処理と異なる処理を説明し、図5と同じ処理の説明は省略する。
【0119】
具体的には、S1307において、車載用カメラ107−2の焦点位置1105(自動車座標系)と、車載カメラ107−2で撮影された画像における特徴点1201(自動車座標系)とを結ぶ直線を求める。
【0120】
S1308では、S1306において求めた直線(図5のS206と同じ処理を行うことにより求めた直線)と、S1307において求めた直線との交点を求める。
【0121】
ここで、S1308では、必ずしも交点が求められるわけではなく、解が存在しない場合がある。この場合、直線1202と直線1108とが最も近づく際のそれぞれの直線上の点を求め、その座標の平均値をもって直線1202と直線1108との交点とする(S1309)。なお、S1308において解が存在する場合には、そのままS1310の処理に進む。
【0122】
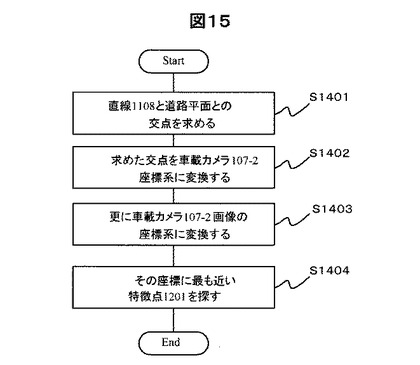
ところで、S1307において、特徴点1201を用いているが、特徴点1101が、車載カメラ107−2で撮影した画像で得られた特徴点のうち、どれに対応するかを探し当てる必要がある。その処理のフローについて、図15を用いて説明する。
【0123】
図15は、本実施形態の位置測位システムの特徴点を特定するために用いる基準点を求める処理のフローを説明するための図である。
【0124】
まず、S1401で、直線1108と道路平面との交点を求める。続いて、求めた交点を、車載カメラ107−2座標系に変換し(S1402)、更に車載カメラ107−2画像の座標系に変換する(S1403)。この座標が特徴点を探すための基準となる点(基準点)になる。この基準点の近傍をスキャンし、最も近い特徴点を、特徴点1101の対応点1201とする。
【0125】
また、図15の処理ステップを実施する場合、特徴点を車載カメラ107の近くに設定した方が高い測定精度を得ることができる。これは、遠くの位置における画像の点はピクセル単位による誤差の幅が大きいためである。したがって、撮影された画像の画素のうち、車載カメラ107に近い位置から特徴点を選択するとよい。この処理は、図5で示したS203の特徴点抽出処理にも含まれるものである。これについて、図16を用いて説明する。
【0126】
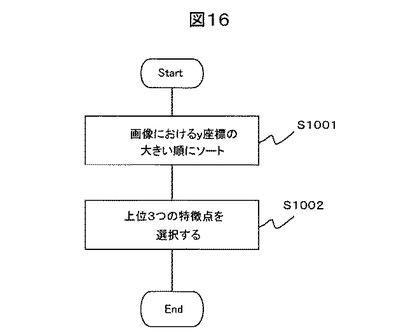
図16は、本発明の実施形態の特徴点を選択する処理のフローを説明するための図である。
【0127】
画像の左上を原点とすると、車載カメラ107に近いほど、画像のy座標が大きくなる。この性質から、車載カメラ107に近い特徴点を抽出するには、y座標の大きい特徴点を選択すればよい。具体的には、位置計算部102は、画像処理部104が抽出した抽出した特徴点を、y座標の大きい順にソートする(S1001)。
【0128】
次に、位置計算部102は、y座標の大きい順に上位3つの特徴点を選択する(S1002)。この処理を終えた後、図5に示すS204以降の処理に進む。
【0129】
このように本実施形態の位置測位システムは、車両前方を撮影した画像を利用して特徴点を抽出し、車両を基準にした特徴点の位置(自動車座標系で示した特徴点の座標)を算出している。また、位置測位システムは、特徴点の位置(ワールド座標系で示した特徴点の座標)を含む道路標示情報DB105を保持している。位置測位システムは、GPS信号およびジャイロ等のセンサにより求めた暫定的な自車位置を利用して、道路標示情報DB105の中から、上記の抽出した特徴点に対応する特徴点の位置(ワールド座標系で示した特徴点の座標)を特定する。そして、本実施形態の位置測位システムは、特定した特徴点の位置(ワールド座標系で登録されている位置)と、算出した自動車座標系の特徴点の座標と、ワールド座標系と自動車座標系の関係とから車両の現在位置を算出するようにしている。
【0130】
したがって、本実施形態によれば、GPS信号やジャイロ等のセンサにより求めた自車位置が誤差を含んでいる場合であっても、正確な自車位置を求めることができる。例えば、本実施形態によれば、都心部のビル街や山間エリア等のGPS信号の受信状態が悪い環境であっても、自車位置を正確に算出することができる。また、例えば、ジャイロ等のセンサにより測位誤差が生じる場合も自車位置を正確に算出することができる。
【0131】
また、本実施形態では、上述した特許文献1のように、2つの地点で撮影された画像を利用する方法を採用せず、1つの地点で撮影された画像から特徴点を抽出するようにしている。すなわち、本実施形態では、正確な現在位置を算出するために車両を走行させる必要がない。したがって、本実施形態によれば、車両が走行中であるか停車中であるかに関係なく、現在位置を精度高く算出することが可能になる。
【0132】
また、本実施形態は、現在位置の算出に用いる特徴点として、道路上の道路標示(例えば、白線)を利用するようにしている。すなわち、本実施形態で利用する特徴点は、上述した特許文献2のように交差点近傍に配置されているものに限定されていない。したがって、本実施形態では、正確な自車位置を算出できるエリアが特定の範囲に限定されることがなく、正確な自車位置が算出される可能性が高まる。
【0133】
なお、本発明は以上で説明した実施形態に限定されるものではなく、本発明の要旨の範囲内において種々の変形が可能である。例えば、上記実施形態では、道路標示として、道路上に引かれた車線を利用する場合を例に説明したが特にこれに限定されるものではない。例えば、道路上に引かれた「速度規制」の表示等を利用するようにしてもよい。
【0134】
また、上記実施形態で説明した図4の処理を所定のタイミングで行うように定めておいてもよい。例えば、位置測位システムの起動の際や、所定時間毎に図4の処理を行い、それ以外の場合には、GPS信号およびセンサから求めた暫定自車位置を用いて、利用者に現在位置を提示するようにしてもよい。
【0135】
また、本実施形態では、暫定的な自車位置を測位する方法として、GPS信号と、ジャイロ902および車速センサ903からの信号とを利用する場合を説明したが、これは例示に過ぎない。GPS信号だけで暫定的な現在位置を求めるようにしてもよい。また、センサとして、ジャイロ902に加え、さらに地磁気センサ等のセンサを利用してもよい。
【0136】
本実施形態において、車載カメラ107が撮影した画像から特徴点が1つしか抽出できないことも考えられる。この場合、例えば、画像中の任意の1点を選択し、その抽出された特徴点と選択した点とを結ぶ直線を求め、その直線を上述した直線512として、その後の処理を行うようにしてもよい。
【0137】
また、上記の実施形態では、左側の車線から特徴点を抽出する場合を説明したがこれは例示に過ぎない。右側の車線から特徴点を抽出するようにしてもかまわない。例えば、右側の車線から特徴点を2以上抽出できるならば、上述した車載カメラ107−1と車載カメラ107−2の役割を逆転させてその後の処理を行うようにすればよい。
【図面の簡単な説明】
【0138】
【図1】本発明の実施形態が適用された位置測位システムの機能構成を説明するための図である。
【図2】本発明の実施形態の位置測位システムのハードウェア構成を説明するための図である。
【図3】本発明の実施形態の道路標示情報DB105のデータ構造を模擬的に示す図である。
【図4】本発明の実施形態の位置測位システムが行う現在位置算出処理のフローを説明するための図である。
【図5】本発明の実施形態の測位アルゴリズムを説明するための図である。
【図6】本発明の実施形態で用いる座標系を説明するための図である。
【図7】画像から抽出した車線を示す図である。
【図8】画像を二値化した結果を示す図である。
【図9】画像から抽出した特徴点を示す図である。
【図10】本発明の実施形態の抽出した特徴点にワールド座標を対応付ける処理のフローを説明するため図である。
【図11】本発明の実施形態の特徴点を抽出する方法を説明するための概念図である。
【図12】本発明の実施形態の車載カメラを1台にした場合の位置測位の処理のフローを説明するための図である。
【図13】本発明の実施形態の特徴点を抽出する方法の変形例を説明するための概念図である。
【図14】本発明の実施形態の位置測位システムが行う特徴点を抽出する処理のフローを説明するための図である。
【図15】本発明の実施形態の位置測位システムの特徴点を特定するために利用する基準点を求める処理のフローを説明するための図である。
【図16】本発明の実施形態の特徴点を選択する処理のフローを説明するための図である。
【符号の説明】
【0139】
100…ナビゲーション装置、102…位置計算部、103…測位処理部、104…画像処理部、105…道路標示情報DB、107…車載カメラ、108…GPSアンテナ、901…標示装置、902…ジャイロ、903…車速センサ、904…GPS受信装置、905…情報処理装置、906…記憶装置、907…通信モジュール、910…CPU、911…メモリ、912…I/OIF
【技術分野】
【0001】
本発明は、現在位置を算出するための技術に関し、特に車両に搭載された位置測位装置の技術に関する。
【背景技術】
【0002】
従来から、車両の現在位置を算出する方法として、ジャイロや地磁気センサ等のセンサから取得した情報を利用する方法(自律航法)、GPS(Global Positioning System)衛星からの信号を利用する方法、或いは、GPSと自律航法とを組合せたハイブリット方法等が知られている。これらの現在位置算出方法は、いずれも、測位誤差が生じるという問題を有している。
【0003】
自律航法やGPSを利用して求めた現在位置の誤差を補正するための手法が特許文献1に提案されている。特許文献1では、カメラが撮影した車両の前方の対象物の画像を利用して現在位置を補正するようにしている。具体的には、特許文献1には、カメラからの画像と、センサ等からの情報とを利用して2地点間の距離と各地点における同一対象物への仰角とに基づき、移動後の地点から対象物までの距離を計算し、その距離を用いて自車位置を補正するナビゲーション装置が開示されている。なお、特許文献1では、対象物として信号機などが想定されている。
【0004】
また、特許文献2には、カメラで撮影された車両の周辺画像から得られた特徴点と、予め保持している地図情報とを比較し、その比較結果に基づいて車両の現在位置を修正する技術が開示されている。なお、特徴点としては、交差点の標識や信号機等を利用するようにしている。
【0005】
【特許文献1】特許第3381312号公報
【特許文献2】特開平9−152348号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1は、以下の問題を有している。具体的には、特許文献1の技術により現在位置を補正する場合、車両の走行中に、先ず、任意の地点で信号機等の対象物に対する仰角を求め、その後、車両がある距離を走行してから再び同じ対象物に対する仰角を求める必要がある。つまり、特許文献1では、移動しながら仰角や距離の変化を求めて位置を補正するため、ある程度の距離を走行しない限り位置補正ができない。すなわち、特許文献1では、車両が停止中の場合に現在位置を補正することができないという問題を有している。
【0007】
また、特許文献1は、上記の2地点と対象物とが一直線上に並んでいることを前提としている。しかし、実際の道路では、2地点と対象物とが一直線上に並ぶことは稀であるため、現在位置を正確に補正できないことが多い。すなわち、特許文献1の技術は、実際の道路での利用は困難であると考えられる。
【0008】
また、特許文献2では、現在位置の補正に利用するための特徴点が交差点近傍に配置されているものに限定されているため、交差点がほとんど存在しない高速道路などでは適用が困難であるという問題を有している。すなわち、特許文献2では、車両が存在する位置によっては、測位した現在位置の誤差を補正できないことがあるという問題を有している。さらに、特許文献2では、特徴点までの距離がその対象物の画像中における大きさに基づいて計算されているため、画像の解像度によっては、正確な距離が算出できない可能性がある。
【0009】
本発明は、上記事情に鑑みてなされたものであり、本発明の目的は、位置を測位するシステムにおいて、高精度に現在位置を算出することにある。
【課題を解決するための手段】
【0010】
上記課題を解決するため、本発明の一態様は、車両に搭載されている位置測位装置に適用される。
【0011】
そして、前記位置測位装置は、道路標示を示すパターン情報と、該パターン情報に対応付けられた道路標示の特徴点をワールド座標系で示した位置情報(特徴点のワールド座標)とが登録されている道路標示情報を記憶する手段と、測位衛星からの信号および各種センサからの信号を利用して車両の位置をワールド座標系で示した暫定現在位置を算出する手段と、車両の前方を撮影する撮像手段と、前記撮像手段が撮影した画像および前記道路標示情報に登録されているパターン情報を用いて、該撮影した画像の中に道路標示が在るか否かを判定し、前記画像の中に前記道路標示が在ると判定した場合、該画像の中にある道路標示の特徴点を抽出し、前記暫定現在位置を基準にした座標系(自動車座標系)における特徴点の座標(自動車座標系特徴点)を算出する抽出手段と、前記算出した暫定現在位置および前記道路標示情報を用いて、前記道路標示情報に登録されている道路標示の特徴点の中から前記抽出した特徴点に対応する道路標示の特徴点のワールド座標を特定する特定手段と、前記算出した自動車座標系特徴点と、前記特定した特徴点のワールド座標と、予め定められている前記ワールド座標系と前記自動車座標系との対応関係と、を用いて、該ワールド座標系で示した車両の現在位置を算出する手段と、を有する。
【発明の効果】
【0012】
このように本発明では、測位衛星からの信号等を利用して暫定的な現在位置を求めておいて、撮影された車両前方の画像を用いて、暫定現在位置を基準にした座標系(自動車座標系)における道路標示の特徴点の座標(自動車座標系特徴点)を算出するようにしている。そして、算出した自動車座標系特徴点と、記憶している道路標示の特徴点の座標(ワールド座標系で示した座標)とを用いて、車両の現在位置を算出するようにしている。そのため、本発明によれば、測位衛星からの信号および各種センサからの信号による測位では誤差を含んでしまう場合であっても、精度の高い現在位置を算出することができる。
【0013】
また、本発明では、道路上の特徴点の座標を求め、それらの座標を用いて自車位置を算出するため、任意の場所において精度の高い自車位置の算出が可能となる。また、本発明によれば、車両が走行中であるか、あるいは停車中であるかによらず、正確な自車位置の算出が可能となる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施形態について図面を用いて説明する。
【0015】
先ず、本実施形態の概略構成について、図1を用いて説明する。
【0016】
図1は、本発明の実施形態が適用された位置測位システムの機能構成を説明するための図である。なお、図1には、車両の運転席から見える景色の例を示している。
【0017】
図示するように、本実施形態の位置測位システムは、ナビゲーション装置101と、車両の前方を撮像する車載カメラ107−1、2とを有する。なお、ナビゲーション装置101には、GPS(Global Positioning System)衛星から送信されたGPS信号を受信するGPSアンテナ108と、ジャイロ902や車速センサ903等の各種センサ(図2参照)と、が接続されている。
【0018】
車載カメラ107−1、2は、フロントガラス106のすぐ後ろに設置されている。なお、図1では、車載カメラ107−1が車両の中心から見て右側に配置されていて、車載カメラ107−2が車両の中心から見て左側に配置されていている場合を例示している。また、フロントガラス106越しには、通常の場合(車両が道路上にいる場合)であれば、標識110や道路上に引かれた道路標示(例えば、白線109)が見えている。そして、車載カメラ107−1、2は、車両の前方の標識110および道路上に引かれた道路標示(例えば、白線109)を撮影できるように設置されているものとする。また、GPSアンテナ108は、例えば、ダッシュボード上か車の屋根等に設置されている。
【0019】
ナビゲーション装置101は、GPSアンテナ108が受信するGPS信号等を利用して暫定的な現在位置(暫定現在位置)を算出し、さらに車載カメラ107−1、2が撮影した車両前方の画像情報および暫定現在位置を利用して車両の現在位置を特定する。具体的には、ナビゲーション装置101は、位置計算部102、測位処理部103、画像処理部104、および道路標示情報DB105を有する。道路標示情報DB105には、道路標識110や白線109を示すパターン情報、その位置情報等が格納されている(図3参照)。
【0020】
測位処理部103は、GPSアンテナ108が受信したGPS信号と、ジャイロ902および車速センサ903からの信号とを利用して車両の暫定現在位置を算出する。画像処理部104は、車載カメラ107−1、107−2がそれぞれ撮影した画像情報に所定の処理(所定の処理については後段で詳細に説明する)を行い、処理結果を位置計算部102に出力する。位置計算部102は、道路標示情報DB105に格納されている情報および画像処理部104の処理結果と、測位処理部103が算出した暫定現在位置とを用いて、車両の現在位置を算出する。なお、測位処理部103が行う、暫定的な現在位置を算出する処理は、従来技術により実現されるものとする。
【0021】
続いて、本実施形態の位置測位システムのハードウェア構成を説明する。
【0022】
図2は、本発明の実施形態の位置測位システムのハードウェア構成を説明するための図である。
【0023】
図示するように、ナビゲーション装置101は、上述した位置計算部102、測位処理部103、および画像処理部104の機能を実現する情報処理装置905と、車両の現在位置を地図上に示した画像等(ナビ画面)を表示する表示装置901と、地図情報(図示しない)および道路標示情報DB105を記憶する記憶装置906と、GPS受信装置904と、を有する。
【0024】
情報処理装置905には、各種の処理を実行するCPU910と、メモリ911と、表示装置901や記憶装置906等の装置との間のデータ送受信を制御するI/OIF912とを有するコンピュータを用いることができる。メモリ911には、位置計算部102、測位処理部103、および画像処理部104の機能を実現するためのプログラム(ナビゲーションプログラム)が記憶されている。そして、位置計算部102、測位処理部103、および画像処理部104の機能は、CPU910がメモリ911に記憶されたナビゲーションプログラムを実行することにより実現される。
【0025】
また、記憶装置906には、例えば、CDおよびCDドライブ、DVDおよびDVDドライブ、HDDなどが使われる。表示装置901には、液晶ディスプレイ、CRT等を用いることができる。
【0026】
GPS受信装置904は、GPSアンテナ108を介してGPS信号を受信し、車両とGSP衛星間の距離および距離の変化率を3個以上の衛星に対して測定することで車両の位置(緯度、経度、高度)、進行方向および進行方位を測定し、測定結果を情報処理装置905に出力する。
【0027】
ジャイロ902には、光ファイバジャイロや振動ジャイロを用いることができ、車両が回転した角度を検出し、検出結果を情報処理装置905に出力する。車速センサ903は、車両の速度を検知し、検知した速度を情報処理装置905に出力する。
【0028】
また、必要に応じて、ナビゲーション装置101に通信モジュール907を接続するようにしてもよい。通信モジュール907は、例えば、記憶装置906に格納されている情報を更新するためにサーバと通信するために用いられる。
【0029】
続いて、道路標示情報DB105のデータ構造について説明する。
【0030】
図3は、本実施形態の道路標示情報DB105のデータ構造を模擬的に示す図である。なお、図3では、日本全国を地域に分割し、地域ごとに情報を管理する場合を例示している。
【0031】
道路標示情報DB105は、日本全国に存在する地域の数を示す「地域数」を登録するためのフィールド801と、フィールド801に登録した「地域数」に対応付けて「地域別情報」を登録するためのフィールド809と、を備える。なお、道路標示情報DB105には、「地域数」の分だけ「地域別情報」が登録されている。
【0032】
「地域別情報」は、「地域ID」、「標識パターン数」、および「標識パターン情報」から構成されている。「地域ID」とは、地域毎に割り振られたIDである。「標識パターン数」は、「標識パターン」の数を示している。なお、「標識パターン」とは、道路上の白線の特徴点(例えば、白線の端部)であったり、「止まれ」等の道路標識であったりする。そして、フィールド809には、「地域ID」を登録するためのフィールド802と、「標識パターン数」を登録するためのフィールド803と、「標識パターン情報」を登録するためのフィールド810と、が対応付けられている。
【0033】
また、フィールド810に登録される「標識パターン情報」は、「パターンID」、「標識数」、「経度」、および「緯度」から構成されている。「パターンID」は、標識パターン毎に割り振られたIDである。「標識数」は、標識パターンごとの登録標識数である。「経度」、「緯度」、「高度」は、標識が存在する場所を示す。そして、「標識パターン情報」を登録するためのフィールド810には、「パターンID」を登録するためのフィールド804と、「標識数」を登録するためのフィールド805と、「経度」を登録するためのフィールド806と、「緯度」を登録するためのフィールド807と、「高度」を登録するためのフィールド808と、が対応付けられている。なお、道路標示情報DB105に登録される「経度」、「緯度」、「高度」は、測位処理部103が求める暫定的な現在位置や地図情報(図示しない)と同じ座標系(ワールド座標系)で示されている。
【0034】
「標識パターン」によっては、「経度」、「緯度」、「高度」の組合せが複数存在する。そのため、例えば、白線の場合は、その白線の両端点を登録したり、横断歩道であれば対角の2点を登録したりする。
【0035】
ところで、道路標示情報DB105に登録されている情報の内容は、日々に変化するものである。例えば、道路工事によって車線の位置が変わることは日常的である。また、新たな標識や看板の設置もよく行われる。したがって、道路標示情報DB105については、情報を更新する仕掛けが設けられていることが望ましい。
【0036】
道路標示情報DB105を更新するには、記憶装置906を交換したり書き換えたりする。記憶装置906がCDドライブおよびCD(DVDドライブおよびDVD)で構成されている場合には、CD(DVD)を交換することにより道路標示情報DB105の内容を更新する。また、記憶装置906がHDDの場合は書換えが可能である。そのため、例えば、店舗で書き換えたり、通信モジュール907(図2参照)を用いてサーバからダウンロードしたりすることが可能である。
【0037】
サーバの情報については、提供業者が日本全国を常時調査して更新することとしてもよいし、或いは、各車両から標識情報をサーバにアップロードしてもらうことにしてもよい。なお、各車両からのアップロードには、通信モジュール907を用いればよい。また、通信モジュール907に携帯電話を用いてもよい。携帯電話を用いる場合、ナビゲーション装置101との接続は、専用のハーネスを用いたり、Bluetooth(登録商標)などのワイヤレス通信技術を用いたりできる。
【0038】
続いて、本実施形態の位置測位システムが行う現在位置算出処理について、図4を用いて説明する。
【0039】
図4は、本発明の実施形態の位置測位システムが行う現在位置算出処理のフローを説明するための図である。
【0040】
先ず、位置計算部102は、車両の暫定的な現在位置(暫定自車位置)を取得する(S1501)。ところで、自車位置は、ナビゲーション装置101を車に設置して最初の起動の際、測位処理部103がGPS受信機904およびジャイロ902等のセンサからの情報を利用して車両の位置を測位し、ナビゲーション装置101の内部に保存される。以降、走行する度に車両の存在する位置は変化するが、その都度、測位処理部103により測位されてカーナビ101内部に保存される。本ステップ(S1501)で取得する暫定自車位置は、ナビゲーション装置101に保存してある自車位置のことである。
【0041】
次に、位置計算部102は、S1501で取得した暫定自車位置をキーにして、道路標示情報DB105から、取得した暫定自車位置周辺(例えば、暫定自車位置から所定距離の範囲)の道路標示情報を検索する(S1502)。その際、位置計算部102は、自車が走行中の地域(車両が停止している場合には、自車が位置する地域)を特定する。これは、道路標示情報DB105の全体を常に検索することを避け、処理時間を短縮するためである。したがって、本ステップ(S1502)を行わないようにしてもよい。なお、本ステップでは、車両の進行方向にある地域だけを特定するようにしてもよい。
【0042】
次に、位置計算部102は、S1501で取得した暫定自車位置、およびS1502で特定した地域をキーにして道路標示情報DB105から、暫定自車位置周辺の道路標示情報を検索する(S1503)。位置計算部102は、検索した結果、標示情報(道路標示や道路標識等)があるかどうかを判定し(S1504)、標示情報があれば画像処理部104を起動し(S1505)、無ければ再びS1501に戻る。
【0043】
画像処理部104は、車載カメラ107からの画像を取得し、取得した画像および道路標示情報DB105を用いて所定の処理(画像処理部105が行う処理内容は、以降で詳細に説明する)を行う。画像処理部104は、車載カメラ107から取得した画像中に、上記で検索した標示情報があるか否かを判定する(S1506)。具体的には、画像処理部104は、取得した画像の中に検索した標示情報の標識パターン情報(図3参照)があるか否かを判定し、標示情報があればS1507に進み、無ければ再びS1501に戻る。なお、車載カメラ107から取得した画像中に標示情報があるか否かは、既存の画像処理技術(パターンマッチング等)により実現されるものとする。
【0044】
S1507では、位置計算部102は、画像処理部104の画像処理結果と、S1501で取得した暫定自車位置を基にして、新たに自車位置を計算する。
【0045】
そして、ナビゲーション装置101は、新たに算出した自車位置を利用して、自車位置周辺の地図上にその自車位置を表示するナビ画面を生成し、表示装置901に表示する。また、ナビゲーション装置101は、新たに算出した自車位置から目的地までの経路探索をしたり、或いは、利用者を目的地まで誘導する処理を行う。なお、S1504で標示情報が無いと判定された場合であっても、自車位置をナビ画面に表示する必要がある。その場合には、暫定現在位置を現在位置としてナビ画面に表示する。
【0046】
このように、本実施形態では、常に画像処理部104で画像処理を実行するのではなく、自車位置周辺に道路標示が存在する場合にだけ、画像処理を実行するようにしている。このようにすることで、画像処理部104の負荷を減らすことが可能になる。もちろん、常に画像処理を実行することにしてもよい。
【0047】
続いて、本実施形態のナビゲーション装置101の位置計算部102が行う測位処理のアルゴリズムについて、図5を用いて説明する。
【0048】
図5は、本発明の実施形態の測位アルゴリズムを説明するための図である。なお、図示するアルゴリズムは、図6に示す複数の座標系を用いることを前提としている。そのため、図5の説明の前に、本実施形態で利用する座標系を説明する。
【0049】
図6に示すように、本実施形態では、ワールド座標系60、自動車座標系61、カメラ座標系62a、b、および画面座標系63a、bが利用される。なお、道路標示情報DB105の中で定義されている位置情報(経度、緯度、高度)は、ワールド座標系60で定義されている。また、記憶装置906に記憶されている地図情報の位置もワールド座標系60で定義されている。
【0050】
図中の(xw,yw,zw)は、ワールド座標系60の座標を示し、(xa,ya,za)は、車両の自車位置を基準にした自動車座標系61の座標を示す。(xcj,ycj,zcj)は、車載カメラ107を基準にしたカメラ座標系62の座標を示し、(xij,yij)は、車載カメラ107が撮影した画像の画面座標系63の座標を示している。そして、ワールド座標系60、自動車座標系61、カメラ座標系62、及び画面座標系63間の座標変換は、以下に示す式(式1)〜(式3)で表され、各座標系が関連付けられている。なお、自動車の停車中は、各座標系の関係は変わらないが、走行すると各座標系の関係は変化する。また、(式1)〜(式3)の中に示す、「(θawa,θiwa,θtwa)」は、ワールド座標系60における自動車姿勢を示す。「(xwa,ywa,zwa)」は、ワールド座標系60における自動車位置を示す。また、「(θaacj,θiacj,θtacj)」は、自動車座標系61におけるカメラ姿勢を示す。「(xacj,yacj,zacj)」は、自動車座標系61におけるカメラ位置を示す。また、「fcj」は、焦点距離を示す。「mcj」は、倍率を示す。「rcj」は、倍率の縦横比を示す。「j(j=1,2)」は、カメラ番号を示す。また、(式3)において、「exj」、「eyj」は、それぞれ光軸の原点からのずれを表している(なお、これは、0にしてもよい)。
【0051】
【数1】
【0052】
【数2】
【0053】
【数3】
【0054】
また、「Rot(y,θ)」、「Rot(z,θ)」、「Tran(x,y,z)」の定義は、それぞれ(式4)(式5)、(式6)の通りであり、それぞれy軸回りの回転、z軸回りの回転、平行移動である。
【0055】
【数4】
【0056】
【数5】
【0057】
【数6】
【0058】
図5に戻り、測位アルゴリズムを説明する。先ず、画像処理部104は、車載カメラ107−1、107−2により撮影された車両前方の道路の画像を取得する。なお、車載カメラ107−1、107−2は、同じタイミングで、車両の前方の道路等(道路および道路周辺にある道路標識)を撮影する。画像処理部104は、取得した画像から道路車線の位置を示す直線を検出する(S201)。この結果は、例えば、図7に示したような車線認識結果となる。図7では、(b)図に、車載カメラ107−1が撮影した画像から車線301、302が抽出された様子を示し、(a)図に車載カメラ107−2が撮影した画像から車線303、304が抽出された様子を示している。
【0059】
次に、画像処理部104は、画面上の車線の位置を示す直線の近傍において、二値化処理とノイズ除去を行い、車線像を抽出する(S202)。この結果は、例えば図8のようになる。
【0060】
次に、画像処理部104は、車載カメラ107−1から得た画面において、画面下側から車線の切れ目の手前外側と奥内側の点を探索し、それらの点を特徴点とする。この特徴点の探索方法によれば、車線が直線の場合、車線の最も外側の点を探索することにより手前外側の点が抽出でき、最も内側の点を探索することにより奥内側の点が抽出できる(S203)。この処置結果の一例を、図9(b)に示す。図示する例では、車線503に対して、車線の切れ目の手前外側が特徴点501として抽出されていて、奥内側を特徴点502として抽出されている。
【0061】
次に、画像処理部104は、車載カメラ107−2から得た画面において各車線ごとに最も右の画素を抽出し、これらの画素の線形近似直線を求める(S204)。最も右の線形近似直線は、図9(a)の例では、直線512に相当する。同様に、車載カメラ107−2から得た画面において各車線ごとに最も左の画素も抽出し、これらの画素の線形近似直線(図示しない)を求める。画像処理部104は、上記の求めた線形近似直線と、S203で抽出した特徴点とを位置計算部102に出力する。
【0062】
その後、位置計算部102により、車載カメラ107−1の画面上(図6に示す画面1座標系63a)の特徴点Ai1(xilA,yilA)を自動車座標系61(暫定自車位置を基準にした座標系)の座標(xaA,yaA,zaA)に変換する処理が行われる(S205)。すなわち、本ステップにおいて、位置計算部102は、以下に示す(式7)、(式8)を用いて、車載カメラ107−1の画面上の特徴点Ai1(xilA,yilA)を自動車座標(xaA,yaA,zaA)に変換する。なお、特徴点Ai1は、画面上に複数存在する。位置計算部102は、本ステップにおいて、すべての特徴点を自動車座標系で示した値に変換する。
【0063】
具体的には、位置計算部102は、まず、(式7)を用いて、画面座標系である特徴点Ai(xilA,yilA)を、車載カメラ107−1カメラ座標系である特徴点Ac(xclA,yclA,zclA)に変換する。
【0064】
【数7】
【0065】
位置計算部102は、更に、車載カメラ107−1座標系に変換した特徴点Ac(xclA,yclA,zclA)を、式(8)を用いて自動車座標系の座標Aa(xaA,yaA,zaA)に変換する。
【0066】
【数8】
【0067】
続いて、位置計算部102は、特徴点Ai1に対応する自動車座標系の点Aa(xaA,yaA,zaA)と、車載用カメラ107−1の焦点位置を自動車座標系で示した座標(xacl,yacl,zacl)とを通る直線を計算する(S206)。なお、車載用カメラ107−1の自動車座標系での焦点位置は、予め、位置計算部102に設定されているものとする(例えば、本システムを車両に設置する際、設置者が光波測量機によりカメラ107−1の焦点位置を求めて、ナビゲーション装置101に設定しておく)。
【0068】
具体的には、S206では、まず、直線の方程式を以下の(式9)のように定義する。
【0069】
【数9】
【0070】
次に、位置計算部102は、式(9)に特徴点を自動車座標系で示した座標Aa(xaA,yaA,zaA)と、車載カメラ107−1の座標(xacl,yacl,zacl)とを当てはめて変形して、(式10)および(式11)を得る。そして、位置計算部102は、(式10)および(式11)を用いて未知のパラメータを計算する。尚、逆行列は掃出し法やガウスの乗数算出法を用いて算出できる。
【0071】
【数10】
【0072】
【数11】
【0073】
次に、位置計算部102は、以下に示す(式12)、(式13)を用いて、車載カメラ107−2の画面における線形近似直線上の任意の2点「Di2」、「Ei2」を抽出し、自動車座標系に変換する。
【0074】
【数12】
【0075】
【数13】
【0076】
次に、点「Di2」、「Ei2」に対応する自動車座標系の点Da(xaD,yaD,zaD)、Ea(xaE,yaE,zaE)と車載カメラ107−2の焦点位置を自動車座標系で示した位置(xac2,yac2,zac2)を含む平面を計算する(S207)。この平面を以下の(式14)のように定義する。なお、車載用カメラ107−2の自動車座標系での焦点位置は、予め、位置計算部102に設定されているものとする(例えば、本システムを車両に設置する際、設置者が光波測量機によりカメラ107−2の焦点位置を求めて、ナビゲーション装置101に設定しておく)。
【0077】
【数14】
【0078】
この(式14)に点Da(xaD,yaD,zaD)、Ea(xaE,yaE,zaE)、車載カメラ107−2の焦点位置(xac2,yac2,zac2)をそれぞれあてはめ、変形すると以下の(式15)が得られる。未知パラメータは(式15)で計算が可能である。
【0079】
【数15】
【0080】
線形近似直線と車載カメラ107−2を含む平面と、特徴点Ai1の車載カメラ107−1の視線510(すなわち、(式14)のことである)との交点が特徴点Ai1の自動車座標系の対応点Fa(xaF, yaF, zaF)(511)であり、以下の(式16)で計算できる(S208)。(式16)は、(式9)と(式14)とを用いて、直線と平面の交点を求める要領で得られる。
【0081】
【数16】
【0082】
最後に、位置計算部102は、以下の(式17)〜(式23)を用いて、番号kの対応点Fakのワールド座標(xwFk,ywFk,zwFk)と、番号kの対応点Fakの自動車座標(xaFk,yaFk,zaFk)とをもとに自動車の位置(xwa,ywa,zwa)と姿勢(θawa,θiwa,θtwa)を計算する(S209)。
【0083】
なお、「Taw」は、自動車座標をワールド座標に変換するための変換行列であり、以下の(式17)のような関係がある。Fakのワールド座標(xwFk,ywFk,zwFk)は、道路標示情報DB105から得られる。なお、(式17)の中の「XwF」と「XaF」は、以下の(式18)、(式19)で定義する。
【0084】
【数17】
【0085】
【数18】
【0086】
【数19】
【0087】
但し、実際は「XaF」を正方行列に変換して(式17)を実行する必要があるため、「XaF」の転置行列を両辺の右からかけて、(式20)のように変換する。その結果、(式21)が成り立つ。
【0088】
【数20】
【0089】
【数21】
【0090】
自動車の位置と姿勢は、(式22)および(式23)で算出される。なお、自動車座標をワールド座標に変換するための変換行列である「Taw」は、上記(式1)に示した通りで、「Taw=Rot(z,θtwa)・Rot(y,θiwa)・Rot(z,θawa)・Tran(-xwa, -ywa, -zwa)」と表すことができる。そして、(式22)で示す「xwa」、「ywa」、「zwa」は、(式21)の右辺を展開することにより求められる。
【0091】
【数22】
【0092】
【数23】
【0093】
ここで、k(k=1,2,…,m)は、特徴点の番号である。特徴点は、複数存在することがある。また、tawpqは、Tawのp行q列の要素である。
【0094】
次に、画像から抽出した特徴点が複数存在する場合において、各特徴点のワールド座標を特定する処理について、図10を用いて説明する。
【0095】
図10は、本発明の実施形態の白線の特徴点のワールド座標を特定する処理のフローを説明するための図である。
【0096】
まず、位置計算部102は、道路標示情報DB105を検索する(S1601)。位置計算部102は、検索の結果、白線の特徴点が複数検索されたか否かを判定し(S1602)、特徴点が複数検索された場合にS1603に進み、複数検索されなかった場合に処理を終了する。
【0097】
S1603では、位置計算部102は、検索された特徴点のワールド座標を用いて、暫定自車位置(図4のS1501で得た車両の現在位置)から各特徴点までの距離を算出する(S1603)。
【0098】
次に、画像処理部104により、車載カメラ107により撮影された画像から各特徴点を抽出し(S1604)、撮像された画像に画像処理を行うことにより、車両から抽出した特徴点までの距離を算出する(S1605)。これは、一般の距離画像を求める方法を応用することで算出できる。画像処理部104は、画像処理を用いて算出した抽出した特徴点まで距離を位置計算部102に送信する。
【0099】
最後に、位置計算部102は、S1605で算出した画像から抽出された特徴点までの距離と、S1603で算出した検索された各特徴点から暫定自車位置までの距離と、を用いて、S1604で抽出された各特徴点に対してワールド座標を紐付ける(S1606)。複数の同じ属性を持つ特徴点があっても、このようにして対応できる。
【0100】
なお、本実施形態では、抽出された特徴点に対してワールド座標を紐付ける処理の具体的な手順については特に限定しない。例えば、位置計算部102は、S1604で抽出された特徴点(自動車座標)毎に、S1605で算出した距離を対応付けておく。また、位置計算部102は、S1602で検索された特徴点(ワールド座標)毎に、S1603で求めた距離を対応付ける。そして、位置計算部102は、S1604で抽出された特徴点(自動車座標)に対応付けた距離に一番近い距離に対応付けられたS1602で検索された特徴点(ワールド座標)を特定する。そして、位置計算部102は、S1604で抽出された特徴点(自動車座標)に、S1602で検索された特徴点(ワールド座標)を関連付ける。
【0101】
以上に記載した特徴点を抽出するアルゴリズムを、図11を用いて、詳細に説明する。図11は、本発明の実施形態の特徴点を抽出する方法を説明するための概念図である。
【0102】
特徴点1101の座標について考える。まず、特徴点1101の座標を自動車座標系に変換する。また、車載カメラ107−1の焦点1104を自動車座標系に変換する。次に、焦点1104(自動車座標系)と特徴点1101(自動車座標系)を結ぶ直線1108を求める。直線1108は、車載カメラ107−1からの視線510(図9(a)参照)に相当する。直線1108を表しているのが上述した(式9)である。
【0103】
次に、直線512を自動車座標系に変換する。また、車載カメラ107−2の焦点1105と直線512を自動車座標系に変換する。そして、焦点1105と直線512を含む平面1103を求める。平面1103を表しているのが上記の(式14)である。直線512は、車線1106と1107の右エッジである。
【0104】
最後に、直線1108と平面1103との交点1102を求める。交点1102は、(式16)で表される。これらの処理を、画面上の全特徴点に対して実行する。最後に、(式17)〜(式23)を用いて自動車位置と姿勢を求める。
【0105】
以上に記載した本アルゴリズムを用いることによって、GPS単独測位やGPSやジャイロ等を利用した位置測位よりも高精度な位置測位が可能となる。すなわち、本実施形態によれば、精度の高い位置測位を実現することができる。また、本実施形態では、対象物の形状や大きさに依存せずに特徴点の座標を求めているため、2つのカメラが離れていても、2つの画像の対応点を求めることが可能である。したがって、測位精度が向上する。
【0106】
さて、上述したアルゴリズムは、車載カメラ107を2台用いる方法であったが、条件が整えば1台でも実施可能である。その条件とは、道路が平面であることと、カメラの姿勢が変わらない、すなわち、カメラの角度が変わらないことである。
【0107】
これを実現するアルゴリズムを、図12を用いて説明する。図12は、本発明の実施形態の車載カメラを1台にした場合の位置測位の処理のフローを説明するための図である。
【0108】
先ず、画像処理部104が、車載カメラ107−1が撮影した車両前方の道路の画像を取得する。画像処理部104は、取得した画像から道路車線の位置を示す直線を検出する(S701)。この結果は、例えば、例えば図7(b)に示したような車線認識結果となる。図7(b)は、上述したように、車載カメラ107−1の画像から、車線301と車線302とを抽出した様子を示している。
【0109】
次に、画像処理部104は、車載カメラ107-1が撮影した画面上の車線の位置を示す直線の近傍において、二値化処理とノイズ除去を行い、車線像を抽出する(S702)。この結果は例えば図8(b)のようになる。
【0110】
続いて、車載カメラ107−1の画面において、画面下側から車線の切れ目の手前外側と奥内側の点を探索し、それらの点を特徴点とする。車線が直線の場合、特徴点の探索方法では、車線の最も外側の点を探索することにより手前外側の点が抽出でき、最も内側の点を探索することにより奥内側の点が抽出できる(S703)。この結果は、図9(b)に示したようになる。例えば、車線503に対しては、車線の切れ目の手前外側は特徴点501であり、奥内側は特徴点502である。
【0111】
次に、上述した(式8)を用いて、車載カメラ107−1の画面上の全特徴点Ai1(xilA,yilA)を自動車座標(xaA,yaA,zaA)に変換する(S701)。ここで、(xclA,yclA,zclA)は、「特徴点Ai1」のカメラ座標系(図6の車載カメラ107−1座標系)の座標であり、上述した(式7)で表される。
【0112】
次に、「特徴点Ai1」に対応する自動車座標系の点Aa(xaA,yaA,zaA)と車載カメラ107-1(xacl,yacl,zacl)を通る直線を計算する(S706)。この直線は、(式9)で表され、未知のパラメータは(式10)、(式11)で計算することができる。逆行列は掃出し法やガウスの乗数算出法を用いて算出できる。
【0113】
次に、道路平面とS706で求めた直線との交点を求める(S707)。この交点は、上述した図5のS208で求めた交点に相当する。そして、最後に、位置計算部102は、上述したS209と同様の手順で、自動車の位置(xwa,ywa,zwa)と姿勢(θawa,θiwa,θtwa)を計算する(S708)。
【0114】
このように、カメラ1台であっても、道路平面の方程式が既知であるという制約条件をつけることによって自車位置を求めることができる。
【0115】
また、上記の実施形態で説明した処理の一部を以下のように変更しても、同様の効果を奏することができる。本実施形態の変更例について、図13を用いて説明する。
【0116】
図13は、本発明の実施形態の特徴点を抽出する方法の変形例を説明するための概念図である。
【0117】
図示する、特徴点1201は、特徴点1101に対応している。また、直線1202は、車載カメラ107−2の焦点1105と特徴点1201を結んだ直線である。そして、車載カメラ107−2の焦点1105と車載カメラ107−2で撮影された画像の特徴点1201とを結ぶ直線を求め、上述した直線1108との交点を特徴点とする。この手順により特徴点を求めるこのアルゴリズムを図14に示す。
【0118】
図14は、本発明の実施形態の位置測位システムが行う特徴点を抽出する処理のフローを説明するための図である。図示する処理は、図5に示した処理のうち、S207、S208を、それぞれS1307、1308に変更し、新たにS1309を追加したものである。なお、ここでは、図5の処理と異なる処理を説明し、図5と同じ処理の説明は省略する。
【0119】
具体的には、S1307において、車載用カメラ107−2の焦点位置1105(自動車座標系)と、車載カメラ107−2で撮影された画像における特徴点1201(自動車座標系)とを結ぶ直線を求める。
【0120】
S1308では、S1306において求めた直線(図5のS206と同じ処理を行うことにより求めた直線)と、S1307において求めた直線との交点を求める。
【0121】
ここで、S1308では、必ずしも交点が求められるわけではなく、解が存在しない場合がある。この場合、直線1202と直線1108とが最も近づく際のそれぞれの直線上の点を求め、その座標の平均値をもって直線1202と直線1108との交点とする(S1309)。なお、S1308において解が存在する場合には、そのままS1310の処理に進む。
【0122】
ところで、S1307において、特徴点1201を用いているが、特徴点1101が、車載カメラ107−2で撮影した画像で得られた特徴点のうち、どれに対応するかを探し当てる必要がある。その処理のフローについて、図15を用いて説明する。
【0123】
図15は、本実施形態の位置測位システムの特徴点を特定するために用いる基準点を求める処理のフローを説明するための図である。
【0124】
まず、S1401で、直線1108と道路平面との交点を求める。続いて、求めた交点を、車載カメラ107−2座標系に変換し(S1402)、更に車載カメラ107−2画像の座標系に変換する(S1403)。この座標が特徴点を探すための基準となる点(基準点)になる。この基準点の近傍をスキャンし、最も近い特徴点を、特徴点1101の対応点1201とする。
【0125】
また、図15の処理ステップを実施する場合、特徴点を車載カメラ107の近くに設定した方が高い測定精度を得ることができる。これは、遠くの位置における画像の点はピクセル単位による誤差の幅が大きいためである。したがって、撮影された画像の画素のうち、車載カメラ107に近い位置から特徴点を選択するとよい。この処理は、図5で示したS203の特徴点抽出処理にも含まれるものである。これについて、図16を用いて説明する。
【0126】
図16は、本発明の実施形態の特徴点を選択する処理のフローを説明するための図である。
【0127】
画像の左上を原点とすると、車載カメラ107に近いほど、画像のy座標が大きくなる。この性質から、車載カメラ107に近い特徴点を抽出するには、y座標の大きい特徴点を選択すればよい。具体的には、位置計算部102は、画像処理部104が抽出した抽出した特徴点を、y座標の大きい順にソートする(S1001)。
【0128】
次に、位置計算部102は、y座標の大きい順に上位3つの特徴点を選択する(S1002)。この処理を終えた後、図5に示すS204以降の処理に進む。
【0129】
このように本実施形態の位置測位システムは、車両前方を撮影した画像を利用して特徴点を抽出し、車両を基準にした特徴点の位置(自動車座標系で示した特徴点の座標)を算出している。また、位置測位システムは、特徴点の位置(ワールド座標系で示した特徴点の座標)を含む道路標示情報DB105を保持している。位置測位システムは、GPS信号およびジャイロ等のセンサにより求めた暫定的な自車位置を利用して、道路標示情報DB105の中から、上記の抽出した特徴点に対応する特徴点の位置(ワールド座標系で示した特徴点の座標)を特定する。そして、本実施形態の位置測位システムは、特定した特徴点の位置(ワールド座標系で登録されている位置)と、算出した自動車座標系の特徴点の座標と、ワールド座標系と自動車座標系の関係とから車両の現在位置を算出するようにしている。
【0130】
したがって、本実施形態によれば、GPS信号やジャイロ等のセンサにより求めた自車位置が誤差を含んでいる場合であっても、正確な自車位置を求めることができる。例えば、本実施形態によれば、都心部のビル街や山間エリア等のGPS信号の受信状態が悪い環境であっても、自車位置を正確に算出することができる。また、例えば、ジャイロ等のセンサにより測位誤差が生じる場合も自車位置を正確に算出することができる。
【0131】
また、本実施形態では、上述した特許文献1のように、2つの地点で撮影された画像を利用する方法を採用せず、1つの地点で撮影された画像から特徴点を抽出するようにしている。すなわち、本実施形態では、正確な現在位置を算出するために車両を走行させる必要がない。したがって、本実施形態によれば、車両が走行中であるか停車中であるかに関係なく、現在位置を精度高く算出することが可能になる。
【0132】
また、本実施形態は、現在位置の算出に用いる特徴点として、道路上の道路標示(例えば、白線)を利用するようにしている。すなわち、本実施形態で利用する特徴点は、上述した特許文献2のように交差点近傍に配置されているものに限定されていない。したがって、本実施形態では、正確な自車位置を算出できるエリアが特定の範囲に限定されることがなく、正確な自車位置が算出される可能性が高まる。
【0133】
なお、本発明は以上で説明した実施形態に限定されるものではなく、本発明の要旨の範囲内において種々の変形が可能である。例えば、上記実施形態では、道路標示として、道路上に引かれた車線を利用する場合を例に説明したが特にこれに限定されるものではない。例えば、道路上に引かれた「速度規制」の表示等を利用するようにしてもよい。
【0134】
また、上記実施形態で説明した図4の処理を所定のタイミングで行うように定めておいてもよい。例えば、位置測位システムの起動の際や、所定時間毎に図4の処理を行い、それ以外の場合には、GPS信号およびセンサから求めた暫定自車位置を用いて、利用者に現在位置を提示するようにしてもよい。
【0135】
また、本実施形態では、暫定的な自車位置を測位する方法として、GPS信号と、ジャイロ902および車速センサ903からの信号とを利用する場合を説明したが、これは例示に過ぎない。GPS信号だけで暫定的な現在位置を求めるようにしてもよい。また、センサとして、ジャイロ902に加え、さらに地磁気センサ等のセンサを利用してもよい。
【0136】
本実施形態において、車載カメラ107が撮影した画像から特徴点が1つしか抽出できないことも考えられる。この場合、例えば、画像中の任意の1点を選択し、その抽出された特徴点と選択した点とを結ぶ直線を求め、その直線を上述した直線512として、その後の処理を行うようにしてもよい。
【0137】
また、上記の実施形態では、左側の車線から特徴点を抽出する場合を説明したがこれは例示に過ぎない。右側の車線から特徴点を抽出するようにしてもかまわない。例えば、右側の車線から特徴点を2以上抽出できるならば、上述した車載カメラ107−1と車載カメラ107−2の役割を逆転させてその後の処理を行うようにすればよい。
【図面の簡単な説明】
【0138】
【図1】本発明の実施形態が適用された位置測位システムの機能構成を説明するための図である。
【図2】本発明の実施形態の位置測位システムのハードウェア構成を説明するための図である。
【図3】本発明の実施形態の道路標示情報DB105のデータ構造を模擬的に示す図である。
【図4】本発明の実施形態の位置測位システムが行う現在位置算出処理のフローを説明するための図である。
【図5】本発明の実施形態の測位アルゴリズムを説明するための図である。
【図6】本発明の実施形態で用いる座標系を説明するための図である。
【図7】画像から抽出した車線を示す図である。
【図8】画像を二値化した結果を示す図である。
【図9】画像から抽出した特徴点を示す図である。
【図10】本発明の実施形態の抽出した特徴点にワールド座標を対応付ける処理のフローを説明するため図である。
【図11】本発明の実施形態の特徴点を抽出する方法を説明するための概念図である。
【図12】本発明の実施形態の車載カメラを1台にした場合の位置測位の処理のフローを説明するための図である。
【図13】本発明の実施形態の特徴点を抽出する方法の変形例を説明するための概念図である。
【図14】本発明の実施形態の位置測位システムが行う特徴点を抽出する処理のフローを説明するための図である。
【図15】本発明の実施形態の位置測位システムの特徴点を特定するために利用する基準点を求める処理のフローを説明するための図である。
【図16】本発明の実施形態の特徴点を選択する処理のフローを説明するための図である。
【符号の説明】
【0139】
100…ナビゲーション装置、102…位置計算部、103…測位処理部、104…画像処理部、105…道路標示情報DB、107…車載カメラ、108…GPSアンテナ、901…標示装置、902…ジャイロ、903…車速センサ、904…GPS受信装置、905…情報処理装置、906…記憶装置、907…通信モジュール、910…CPU、911…メモリ、912…I/OIF
【特許請求の範囲】
【請求項1】
車両に搭載されている位置測位装置であって、
道路標示を示すパターン情報と、該パターン情報に対応付けられた道路標示の特徴点をワールド座標系で示した位置情報(特徴点のワールド座標)とが登録されている道路標示情報を記憶する手段と、
測位衛星からの信号および各種センサからの信号を利用して車両の位置をワールド座標系で示した暫定現在位置を算出する手段と、
車両の前方を撮影する撮像手段と、
前記撮像手段が撮影した画像および前記道路標示情報に登録されているパターン情報を用いて、該撮影した画像の中に道路標示が在るか否かを判定し、前記画像の中に前記道路標示が在ると判定した場合、該画像の中にある道路標示の特徴点を抽出し、前記暫定現在位置を基準にした座標系(自動車座標系)における特徴点の座標(自動車座標系特徴点)を算出する抽出手段と、
前記算出した暫定現在位置および前記道路標示情報を用いて、前記道路標示情報に登録されている道路標示の特徴点の中から前記抽出した特徴点に対応する道路標示の特徴点のワールド座標を特定する特定手段と、
前記算出した自動車座標系特徴点と、前記特定した特徴点のワールド座標と、予め定められている前記ワールド座標系と前記自動車座標系との対応関係と、を用いて、該ワールド座標系で示した車両の現在位置を算出する手段と、を有すること
を特徴とする位置測位装置。
【請求項2】
請求項1に記載の位置測位装置であって、
前記道路標示は、道路上に引かれている車線であって、
前記撮像手段は、車両の左側に設置されている第1の撮像装置と、車両の右側に設置されている第2の撮像装置と、を有し、前記第1および第2の撮像装置の各々が車両前方の道路を撮影し、
前記抽出手段は、
所定の規則にしたがい、前記第1の撮像装置が撮影した画像から車線の端部を探索し、前記暫定現在位置を基準にした座標系において、該探索された端部と前記第1の撮像装置の焦点とを結ぶ第1の直線を求め、
前記第2の撮像装置が撮影した画像から車線を通る近似直線を求め、前記暫定現在位置を基準にした座標系において、前記近似直線と前記第2の撮像装置の焦点とを含む平面を求め、
前記第1の直線と前記平面との交点を特徴点として抽出すること
を特徴とする位置測位装置。
【請求項3】
請求項1に記載の位置測位装置であって、
前記道路標示とは、道路上に引かれている車線であって、
前記撮像手段は、車両の左側に設置されている第1の撮像装置と、車両の右側に設置されている第2の撮像装置と、を有し、前記第1および第2の撮像装置の各々が車両前方の道路を撮像し、
前記抽出手段は、
所定の規則にしたがい、前記第1の撮像装置が撮影した画像の中の車線の端部を探索し、前記暫定現在位置を基準にした座標系において、該探索された端部と前記第1の撮像装置の焦点とを結ぶ第1の直線を求め、
所定の規則にしたがい、前記第2の撮像装置が撮影した画像の中の車線の端部を探索し、前記暫定現在位置を基準にした座標系において、該探索された端部と前記第2の撮像装置の焦点とを結ぶ第2の直線を求め、
前記第1の直線と第2の直線との交点を特徴点として抽出すること
を特徴とする位置測位装置。
【請求項4】
請求項3に記載の位置測位装置であって、
前記抽出手段は、
前記交点の座標が求められなかった場合、さらに、前記第1の直線と前記第2の直線とが最接近する前記第1の直線上の点と前記第2の直線上の点とを求め、該求めた点の平均値の位置を特徴点として抽出すること
を特徴とする位置測位装置。
【請求項5】
請求項3に記載の位置測位装置であって、
前記抽出手段は、
前記第2の撮像装置が撮影した画像から車線の端部が複数探索された場合、前記第1の直線と道路平面との交点を求め、当該交点を前記第2の撮像装置を基準にした座標系の座標に変換し、さらに該変換した座標を前記第2の撮像装置で撮影された画面を上の座標に変換したものを基準点とし、前記複数の端部の中から前記基準点に最も近い端部を特定し、該特定した端部を利用して前記第2の直線を求めること
を特徴とする車両位置測位装置。
【請求項6】
請求項1〜5のいずれか一項に記載の位置測位装置であって、
前記抽出手段は、前記撮影した画像に対して所定の画像処理を施し、該車両から前記抽出した特徴点までの距離を求め、
前記特定手段は、
前記道路標示情報の中から前記暫定現在位置から所定範囲内にある道路標示の特徴点を検索し、前記検索された各特徴点の位置情報および前記暫定現在位置を用いて、該各特徴点から前記暫定現在位置までの距離を算出し、
前記各特徴点から前記暫定現在位置までの距離および前記抽出手段が求めた距離を用いて、前記抽出した特徴点に対応する道路標示の特徴点のワールド座標を特定すること
を特徴とする位置測位装置。
【請求項7】
請求項1〜6のいずれか一項に記載の位置測位装置であって、
前記抽出手段は、前記特徴点が複数抽出された場合、画像における縦方向の座標値を用いて該特徴点を選択すること
を特徴とする位置測位装置。
【請求項8】
車両に搭載され、該車両前方を撮影する撮像装置が接続されている情報処理装置が行う位置測位方法であって、
前記情報処理装置は、道路標示を示すパターン情報と、該パターン情報に対応付けられた道路標示の特徴点をワールド座標系で示した位置情報とが登録されている道路標示情報を記憶していて、
測位衛星からの信号および各種センサからの信号を利用して車両の位置をワールド座標系で示した暫定現在位置を算出するステップと、
前記撮像装置が撮影した車両の前方の画像を取得するステップと、
前記取得した画像および前記道路標示情報に登録されているパターン情報を用いて、該撮影した画像の中に道路標示が在るか否かを判定し、前記画像の中に前記道路標示が在ると判定した場合、該画像の中にある道路標示の特徴点を抽出し、前記暫定現在位置を基準にした座標系(自動車座標系)における特徴点の座標(自動車座標系特徴点)を算出するステップと、
前記算出した暫定現在位置および前記道路標示情報を用いて、前記道路標示情報に登録されている道路標示の特徴点の中から前記抽出した特徴点に対応する道路標示の特徴点のワールド座標を特定するステップと、
前記算出した自動車座標系特徴点と、前記特定した特徴点のワールド座標と、予め定められている前記ワールド座標系と前記自動車座標系との対応関係と、を用いて、該ワールド座標系で示した車両の現在位置を算出するステップとを実行すること
を特徴とする位置測位方法。
【請求項1】
車両に搭載されている位置測位装置であって、
道路標示を示すパターン情報と、該パターン情報に対応付けられた道路標示の特徴点をワールド座標系で示した位置情報(特徴点のワールド座標)とが登録されている道路標示情報を記憶する手段と、
測位衛星からの信号および各種センサからの信号を利用して車両の位置をワールド座標系で示した暫定現在位置を算出する手段と、
車両の前方を撮影する撮像手段と、
前記撮像手段が撮影した画像および前記道路標示情報に登録されているパターン情報を用いて、該撮影した画像の中に道路標示が在るか否かを判定し、前記画像の中に前記道路標示が在ると判定した場合、該画像の中にある道路標示の特徴点を抽出し、前記暫定現在位置を基準にした座標系(自動車座標系)における特徴点の座標(自動車座標系特徴点)を算出する抽出手段と、
前記算出した暫定現在位置および前記道路標示情報を用いて、前記道路標示情報に登録されている道路標示の特徴点の中から前記抽出した特徴点に対応する道路標示の特徴点のワールド座標を特定する特定手段と、
前記算出した自動車座標系特徴点と、前記特定した特徴点のワールド座標と、予め定められている前記ワールド座標系と前記自動車座標系との対応関係と、を用いて、該ワールド座標系で示した車両の現在位置を算出する手段と、を有すること
を特徴とする位置測位装置。
【請求項2】
請求項1に記載の位置測位装置であって、
前記道路標示は、道路上に引かれている車線であって、
前記撮像手段は、車両の左側に設置されている第1の撮像装置と、車両の右側に設置されている第2の撮像装置と、を有し、前記第1および第2の撮像装置の各々が車両前方の道路を撮影し、
前記抽出手段は、
所定の規則にしたがい、前記第1の撮像装置が撮影した画像から車線の端部を探索し、前記暫定現在位置を基準にした座標系において、該探索された端部と前記第1の撮像装置の焦点とを結ぶ第1の直線を求め、
前記第2の撮像装置が撮影した画像から車線を通る近似直線を求め、前記暫定現在位置を基準にした座標系において、前記近似直線と前記第2の撮像装置の焦点とを含む平面を求め、
前記第1の直線と前記平面との交点を特徴点として抽出すること
を特徴とする位置測位装置。
【請求項3】
請求項1に記載の位置測位装置であって、
前記道路標示とは、道路上に引かれている車線であって、
前記撮像手段は、車両の左側に設置されている第1の撮像装置と、車両の右側に設置されている第2の撮像装置と、を有し、前記第1および第2の撮像装置の各々が車両前方の道路を撮像し、
前記抽出手段は、
所定の規則にしたがい、前記第1の撮像装置が撮影した画像の中の車線の端部を探索し、前記暫定現在位置を基準にした座標系において、該探索された端部と前記第1の撮像装置の焦点とを結ぶ第1の直線を求め、
所定の規則にしたがい、前記第2の撮像装置が撮影した画像の中の車線の端部を探索し、前記暫定現在位置を基準にした座標系において、該探索された端部と前記第2の撮像装置の焦点とを結ぶ第2の直線を求め、
前記第1の直線と第2の直線との交点を特徴点として抽出すること
を特徴とする位置測位装置。
【請求項4】
請求項3に記載の位置測位装置であって、
前記抽出手段は、
前記交点の座標が求められなかった場合、さらに、前記第1の直線と前記第2の直線とが最接近する前記第1の直線上の点と前記第2の直線上の点とを求め、該求めた点の平均値の位置を特徴点として抽出すること
を特徴とする位置測位装置。
【請求項5】
請求項3に記載の位置測位装置であって、
前記抽出手段は、
前記第2の撮像装置が撮影した画像から車線の端部が複数探索された場合、前記第1の直線と道路平面との交点を求め、当該交点を前記第2の撮像装置を基準にした座標系の座標に変換し、さらに該変換した座標を前記第2の撮像装置で撮影された画面を上の座標に変換したものを基準点とし、前記複数の端部の中から前記基準点に最も近い端部を特定し、該特定した端部を利用して前記第2の直線を求めること
を特徴とする車両位置測位装置。
【請求項6】
請求項1〜5のいずれか一項に記載の位置測位装置であって、
前記抽出手段は、前記撮影した画像に対して所定の画像処理を施し、該車両から前記抽出した特徴点までの距離を求め、
前記特定手段は、
前記道路標示情報の中から前記暫定現在位置から所定範囲内にある道路標示の特徴点を検索し、前記検索された各特徴点の位置情報および前記暫定現在位置を用いて、該各特徴点から前記暫定現在位置までの距離を算出し、
前記各特徴点から前記暫定現在位置までの距離および前記抽出手段が求めた距離を用いて、前記抽出した特徴点に対応する道路標示の特徴点のワールド座標を特定すること
を特徴とする位置測位装置。
【請求項7】
請求項1〜6のいずれか一項に記載の位置測位装置であって、
前記抽出手段は、前記特徴点が複数抽出された場合、画像における縦方向の座標値を用いて該特徴点を選択すること
を特徴とする位置測位装置。
【請求項8】
車両に搭載され、該車両前方を撮影する撮像装置が接続されている情報処理装置が行う位置測位方法であって、
前記情報処理装置は、道路標示を示すパターン情報と、該パターン情報に対応付けられた道路標示の特徴点をワールド座標系で示した位置情報とが登録されている道路標示情報を記憶していて、
測位衛星からの信号および各種センサからの信号を利用して車両の位置をワールド座標系で示した暫定現在位置を算出するステップと、
前記撮像装置が撮影した車両の前方の画像を取得するステップと、
前記取得した画像および前記道路標示情報に登録されているパターン情報を用いて、該撮影した画像の中に道路標示が在るか否かを判定し、前記画像の中に前記道路標示が在ると判定した場合、該画像の中にある道路標示の特徴点を抽出し、前記暫定現在位置を基準にした座標系(自動車座標系)における特徴点の座標(自動車座標系特徴点)を算出するステップと、
前記算出した暫定現在位置および前記道路標示情報を用いて、前記道路標示情報に登録されている道路標示の特徴点の中から前記抽出した特徴点に対応する道路標示の特徴点のワールド座標を特定するステップと、
前記算出した自動車座標系特徴点と、前記特定した特徴点のワールド座標と、予め定められている前記ワールド座標系と前記自動車座標系との対応関係と、を用いて、該ワールド座標系で示した車両の現在位置を算出するステップとを実行すること
を特徴とする位置測位方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2007−108043(P2007−108043A)
【公開日】平成19年4月26日(2007.4.26)
【国際特許分類】
【出願番号】特願2005−299928(P2005−299928)
【出願日】平成17年10月14日(2005.10.14)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
【公開日】平成19年4月26日(2007.4.26)
【国際特許分類】
【出願日】平成17年10月14日(2005.10.14)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
[ Back to top ]