
位置特定システム、位置特定装置、位置特定方法及びプログラム

【課題】消費電力やコストを抑え、無線タグリーダーを常時設置せずとも物体に貼付した無線タグの位置を特定する。
【解決手段】位置特定システムは、空間1に配置された複数の無線タグのそれぞれの位置情報を記憶し、空間1に配置された位置情報が未知のRFIDタグ4と、複数の位置特定用RFIDタグ2のうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する無線タグリーダー5と、無線タグリーダー5により取得された、複数の位置特定用RFIDタグ2のうち少なくとも3つからの距離と、記憶された当該各位置特定用RFIDタグ2の位置情報とに基づいて、無線タグリーダー5の位置を特定し、無線タグリーダー5が空間1の複数の異なる位置にある場合に特定された各位置と、当該各位置からのRFIDタグ4の距離に基づいて、RFIDタグ4の位置を特定する。
【解決手段】位置特定システムは、空間1に配置された複数の無線タグのそれぞれの位置情報を記憶し、空間1に配置された位置情報が未知のRFIDタグ4と、複数の位置特定用RFIDタグ2のうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する無線タグリーダー5と、無線タグリーダー5により取得された、複数の位置特定用RFIDタグ2のうち少なくとも3つからの距離と、記憶された当該各位置特定用RFIDタグ2の位置情報とに基づいて、無線タグリーダー5の位置を特定し、無線タグリーダー5が空間1の複数の異なる位置にある場合に特定された各位置と、当該各位置からのRFIDタグ4の距離に基づいて、RFIDタグ4の位置を特定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置特定システム、位置特定装置、位置特定方法及びプログラムに関する。
【背景技術】
【0002】
物体の位置を特定する方法の1つに、GPS(Global Positioning System)がある。また、他の方法としては、下記の特許文献1に記載されているように、無線タグを物体に貼付して、物体に貼付された無線タグを位置が固定されている無線タグリーダーにより読み取ることで、物体のおおよその位置を特定することが考えられる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−36428号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、物体の大きさや用途によってはGPS機能を設けることは困難であるし、無線タグリーダーを複数設置するのには消費電力やコストがかかるほか、環境によっては無線タグリーダーを常時設置しておけないこともある。
【0005】
本発明の目的の一つは、消費電力やコストを抑え、無線タグリーダーを常時設置せずとも物体に貼付した無線タグの位置を特定することができる位置特定システム、位置特定装置、位置特定方法及びプログラムを提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の一態様に係る、位置特定システムは、空間に配置された複数の無線タグのそれぞれの位置情報を記憶する記憶手段と、前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する無線タグリーダーと、前記無線タグリーダーにより取得された、前記複数の無線タグのうち少なくとも3つからの距離と、前記記憶手段に記憶された当該各無線タグの位置情報とに基づいて、前記無線タグリーダーの位置を特定するリーダー位置特定手段と、前記無線タグリーダーが前記空間の複数の異なる位置にある場合に前記リーダー位置特定手段により特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定するタグ位置特定手段と、を含むことを特徴とする。
【0007】
また、本発明の一態様では、前記タグ位置特定手段は、前記無線タグリーダーが前記空間の少なくとも3つの異なる位置にある場合に前記リーダー位置特定手段により特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定することを特徴とする。
【0008】
また、本発明の一態様では、前記無線タグリーダーから出力される電波の強度を、所定の数の前記無線タグが識別されるように調整する手段をさらに含むことを特徴とする。
【0009】
また、本発明の一態様では、前記タグ位置特定手段により特定された前記対象無線タグの位置を前記記憶手段にさらに記憶させることを特徴とする。
【0010】
また、本発明の一態様では、前記無線タグリーダーは、所定の周期で前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得することを特徴とする。
【0011】
また、本発明の一態様に係る位置特定装置は、空間に配置された複数の無線タグのそれぞれの位置情報を記憶する記憶手段と、前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する無線タグリーダーにより取得された、前記複数の無線タグのうち少なくとも3つからの距離と、前記記憶手段に記憶された当該各無線タグの位置情報とに基づいて、前記無線タグリーダーの位置を特定するリーダー位置特定手段と、前記無線タグリーダーが前記空間の複数の異なる位置にある場合に前記リーダー位置特定手段により特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定するタグ位置特定手段と、を含むことを特徴とする。
【0012】
また、本発明の一態様に係る位置特定方法は、空間に配置された複数の無線タグのそれぞれの位置情報を記憶手段に記憶するステップと、前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を無線タグリーダーにより取得するステップと、前記無線タグリーダーにより取得された、前記複数の無線タグのうち少なくとも3つからの距離と、前記記憶手段に記憶された当該各無線タグの位置情報とに基づいて、前記無線タグリーダーの位置を特定するリーダー位置特定ステップと、前記無線タグリーダーが前記空間の複数の異なる位置にある場合に前記リーダー位置特定ステップで特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定するタグ位置特定ステップと、を含むことを特徴とする。
【0013】
また、本発明の一態様に係るプログラムは、コンピュータを、空間に配置された複数の無線タグのそれぞれの位置情報を記憶する記憶手段と、前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する無線タグリーダーにより取得された、前記複数の無線タグのうち少なくとも3つからの距離と、前記記憶手段に記憶された当該各無線タグの位置情報とに基づいて、前記無線タグリーダーの位置を特定するリーダー位置特定手段と、前記無線タグリーダーが前記空間の複数の異なる位置にある場合に前記リーダー位置特定手段により特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定するタグ位置特定手段として機能させるためのプログラムである。
【発明の効果】
【0014】
本発明の一態様によれば、消費電力やコストを抑え、無線タグリーダーを常時設置せずとも物体に貼付した無線タグの位置を特定することができる。
【0015】
本発明の一態様によれば、物体に貼付した無線タグの位置を精度良く特定することができる。
【0016】
本発明の一態様によれば、物体に貼付した無線タグの位置を特定するために必要なデータの収集を効率よく行うことができる。
【0017】
本発明の一態様によれば、物体に貼付した無線タグの位置を、他の位置情報が未知の無線タグの位置特定に利用することができる。
【0018】
本発明の一態様によれば、ユーザーが無線タグリーダーを手にして巡回することで、物体に貼付した無線タグの位置を特定するために必要なデータの収集を行うことができる。
【図面の簡単な説明】
【0019】
【図1】本実施形態に係る位置特定システムにより位置を特定する対象の物体が配置された空間の平面図である。
【図2】位置特定システムの機能ブロック図である。
【図3】タグ情報テーブルの一例を示す図である。
【図4】位置情報テーブルの一例を示す図である。
【図5】あるタイミングにおける、無線タグリーダー、物体、そして対象空間に配置された一部の位置特定用RFIDタグの位置関係を示す図である。
【図6】3つの異なるタイミングにおける、無線タグリーダー、物体の位置関係を示す図である。
【図7】物体に貼付されたRFIDタグの位置を特定するための他の方法を説明する図である。
【図8】位置特定処理のフローチャートである。
【発明を実施するための形態】
【0020】
以下、本発明を実施するための好適な実施の形態(以下、実施形態という)を、図面に従って説明する。
【0021】
図1は、本実施形態に係る位置特定システム10により位置を特定する対象の物体が配置された空間(対象空間1)の平面図である。対象空間1には、位置情報が予め定められたRFIDタグ(位置特定用RFIDタグ2)が複数配置されている。この位置特定用RFIDタグ2は、図1に示された例では対象空間1内に縦横に所定の間隔で配置されているが、これに限らず任意の位置に配置されることとしてよい。また、対象空間1がオフィス等であれば、位置特定用RFIDタグ2は、柱やデスク等の基準となる位置にそれぞれ配置することとしてもよい。
【0022】
対象空間1に配置された物体3には、ID情報が既知のRFIDタグが貼付されている。この物体3に貼付されたRFIDタグ4の位置情報は未知であり、本実施形態に係る位置特定システム10は物体3に貼付されたRFIDタグ4の位置情報を位置特定用RFIDタグ2から得られる情報に基づいて特定することとする。なお、上記の処理の詳細については後述する。また、本実施形態におけるRFIDタグには、無線タグリーダー5からの電波をエネルギー源として動作するパッシブタグを用いることとするが、アクティブタグを用いることとしても構わない。
【0023】
無線タグリーダー5は、所定の周期で電波を送信し、送信した電波に対するRFIDタグからの反応を受け取ることにより、無線タグリーダー5からの電波を受信可能な領域内に存在するRFIDタグの情報を取得するデバイスである。本実施形態では、無線タグリーダー5には携帯型のデバイスを用いることとし、ユーザー6は無線タグリーダー5を起動させた状態で無線タグリーダー5を手に対象空間1内を巡回する。この際、無線タグリーダー5は、対象空間1内の複数の各位置において、RFIDタグからの反応に基づく情報を取得し、当該取得した情報をメモリに記録していくこととする。
【0024】
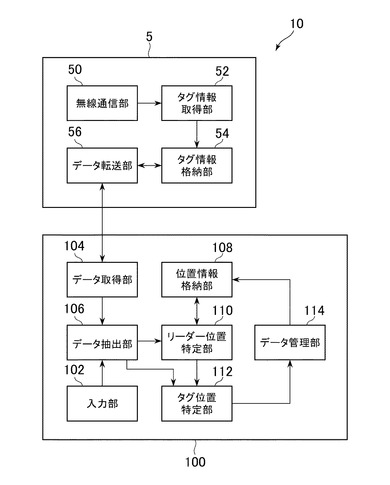
図2には、位置特定システム10の機能ブロック図を示した。図2に示されるように、位置特定システム10は、無線タグリーダー5と情報処理装置100を含む。以下、各装置が備える機能の詳細について説明する。
【0025】
図2に示されるように、無線タグリーダー5は、無線通信部50、タグ情報取得部52、タグ情報格納部54、及びデータ転送部56を含む。以下、各部の機能の詳細について説明する。
【0026】
無線通信部50は、所定の周波数の電波を送受信するアンテナを含み、送信した電波に対するRFIDタグからの反射波を受信するものである。なお、RFIDタグからの反射波には、当該RFIDタグのID情報が乗せて返される。また、無線通信部50により出力される電波の強度は調整可能としてよく、例えば無線タグリーダー5の位置から所定の数(例えば4つ等)以上のRFIDタグの情報が平均的(時間的又は/及び空間的な平均であってよい)に取得されるように、電波の出力強度を調整することとしてよい。さらに、無線通信部50は、指定されたタイミングで電波を送信するようにしてもよいし、指定された時間間隔毎に順次電波を送信するようにしてもよい。
【0027】
タグ情報取得部52は、無線通信部50により送信された電波に対する対象空間1に配置された1又は複数のRFIDタグからの反射波に基づいて、各RFIDタグの情報(タグ情報)を取得するものである。本実施形態では、タグ情報は、情報の取得時刻、RFIDタグのID情報、RFIDタグまでの距離情報を含むデータとする。情報の取得時刻は、無線通信部50により反射波を受信した際の時間情報としてもよいし、電波を送信した際の時間情報としてもよい。また、RFIDタグのID情報は、受信した反射波に含まれるID情報を抽出して取得することとしてよい。そして、RFIDタグまでの距離情報は、無線タグリーダー5とRFIDタグとの距離を表すデータであり、例えば無線タグリーダー5による電波の送信時刻と、当該電波のRFIDタグからの反射波を受信した受信時刻とに基づいて算出することとしてもよいし、他の公知の手法を用いることとしてもよい。
【0028】
タグ情報格納部54は、例えば半導体メモリを含み、タグ情報取得部52により取得されたタグ情報が順次格納されるものである。
【0029】
図3には、タグ情報格納部54に格納されるタグ情報テーブルの一例を示す。図3に示されるように、タグ情報テーブルは、情報の取得時刻、RFIDタグのID情報、距離情報をそれぞれ対応づけて格納したテーブルとして構成されることとしてよい。
【0030】
データ転送部56は、例えばUSB等のシリアルインターフェースを含み、タグ情報格納部54に格納されたデータを読み出して外部の装置に転送するものである。
【0031】
次に、情報処理装置100に備えられた機能について説明する。図2に示されるように、情報処理装置100は、入力部102、データ取得部104、データ抽出部106、位置情報格納部108、リーダー位置特定部110、タグ位置特定部112、データ管理部114を含む。上記の各部の機能は、CPU等の制御手段、メモリ等の記憶手段、外部デバイスとデータを送受信する入出力手段等を備えたコンピュータが、コンピュータ読み取り可能な情報記憶媒体に格納されたプログラムを読み込み実行することで実現されるものとしてよい。なお、プログラムは情報記憶媒体によってコンピュータである情報処理装置100に供給されることとしてもよいし、インターネット等のデータ通信手段を介して供給されることとしてもよい。
【0032】
入力部102は、キーボードやマウス等の入力デバイスと接続する入力インターフェースを含み、入力デバイスから操作情報の入力を受け付けるものである。
【0033】
データ取得部104は、例えばUSB等のシリアルインターフェースを含み、データ転送部56から転送されるデータを取得するものである。
【0034】
データ抽出部106は、データ取得部104により取得したタグ情報の中から、物体3の位置特定に用いるタグ情報を抽出するものである。本実施形態では、例えば入力部102を介して位置を特定する対象の物体3に貼付されたRFIDタグ4のID情報が入力されると、当該入力されたID情報と同タイミングで取得されたRFIDタグについてのタグ情報を抽出することとする。
【0035】
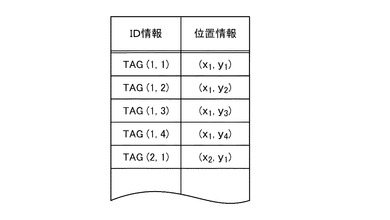
位置情報格納部108は、例えば半導体メモリやハードディスクドライブ等の記憶装置を含み、対象空間1に配置された位置特定用RFIDタグ2のそれぞれの位置情報を格納するものである。本実施形態では、位置情報は、対象空間1の平面図について設定された二次元座標系における座標値(X座標,Y座標)を用いて表すこととするが、二次元座標に限らず三次元座標を用いて表すこととしても構わない。
【0036】
図4には、位置情報格納部108に格納される位置情報テーブルの一例を示した。図4に示されるように、位置情報テーブルは、位置特定用RFIDタグ2のID情報に関連づけて、位置情報(X座標,Y座標)が格納されたテーブルとして構成されるものである。
【0037】
リーダー位置特定部110は、データ抽出部106により抽出されたタグ情報に基づいて、無線タグリーダー5の位置情報を特定するものである。以下、図5を参照しながら、リーダー位置特定部110により行われる処理の具体例を説明する。
【0038】
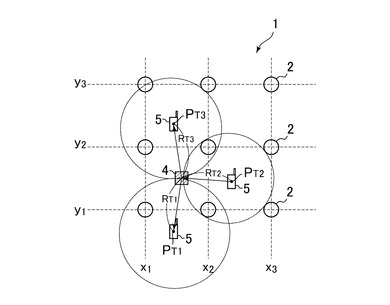
図5は、あるタイミングにおける、無線タグリーダー5、物体3、そして対象空間1に配置された一部の位置特定用RFIDタグ2の位置関係を示す図である。リーダー位置特定部110は、抽出されたタグ情報のうち取得時刻が一致する(又は所定の時間範囲内にある)タグ情報に基づいて、当該取得時刻においてID情報が取得された位置特定用RFIDタグ2(例えばRFIDタグ(1,1),(2,1),(2,2)とする)の各々について位置情報格納部108に格納される位置情報と、無線タグリーダー5と各位置特定用RFIDタグ2とのそれぞれの距離に基づいて、無線タグリーダー5の位置を特定する。すなわち、リーダー位置特定部110は、RFIDタグ(1,1)から距離RAの円と、RFIDタグ(2,1)から距離RBの円と、RFIDタグ(2,2)から距離RCの円との交点の位置を求め、当該交点の位置を無線タグリーダー5の位置として得る。
【0039】
リーダー位置特定部110は、取得時刻が異なるタグ情報について上記の処理を行い、無線タグリーダー5の複数の異なる位置情報を得ることとする。なお、リーダー位置特定部110は、データ抽出部106により抽出されたタグ情報のうち、取得時刻が一致する(又は所定の時間範囲内にある)ものを選択し、当該選択されたタグ情報のうち位置特定用RFIDタグ2のデータを示すものの数が3以上である場合に、無線タグリーダー5の位置を算出する処理を行うこととしてよい。
【0040】
タグ位置特定部112は、リーダー位置特定部110により特定された無線タグリーダー5の複数の異なる位置情報と、当該各位置情報における無線タグリーダー5と物体3に貼付されたRFIDタグ4の距離情報に基づいて、物体3に貼付されたRFIDタグ4の位置(すなわち物体3の位置)を特定するものである。以下、図6を参照しながら、タグ位置特定部112による処理の具体例を説明する。
【0041】
図6には、3つの異なるタイミング(T1,T2,T3)における、無線タグリーダー5、物体3の位置関係を示す図である。なお、各タイミングにおける無線タグリーダー5の位置PT1,PT2,PT3は、それぞれ異なるものとする。そして、各タイミングにおいて、無線タグリーダー5の位置と、無線タグリーダー5と物体3に貼付されたRFIDタグ4との距離は分かっているため、タグ位置特定部112は、位置PT1の無線タグリーダー5から距離RT1の円と、位置PT2の無線タグリーダー5から距離RT2の円と、位置PT3の無線タグリーダー5から距離RT3の円との交点の位置を求め、当該交点の位置を物体3に貼付されたRFIDタグ4の位置として得る。
【0042】
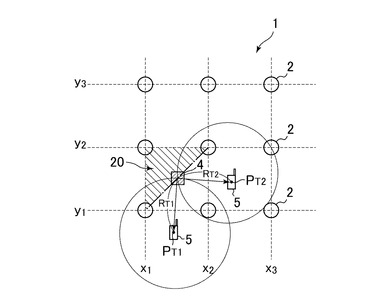
図7には、物体3に貼付されたRFIDタグ4の位置を特定するための他の方法を説明する図を示した。図7には、2つの異なるタイミングにおける(T1,T2)、無線タグリーダー5、物体3、位置特定用RFIDタグ2の位置関係を示した。なお、各タイミングにおける無線タグリーダー5の位置PT1,PT2は、それぞれ異なるものとする。そして、各タイミングにおいて無線タグリーダー5の位置、及び無線タグリーダー5と物体3に貼付されたRFIDタグ4との距離は分かっており、物体3に貼付されたRFIDタグ4の存在領域は、無線タグリーダー5により識別された位置特定用RFIDタグ2により囲まれる領域20内にあると推定されるため、タグ位置特定部112は、領域20と、第1のタイミングT1における無線タグリーダー5の位置PT1から距離RT1にある円と、第2のタイミングT2における無線タグリーダー5の位置PT2から距離RT2にある円との交点を求めることで、当該交点の位置を物体3に貼付されたRFIDタグ4の位置として得る。
【0043】
データ管理部114は、タグ位置特定部112により特定された物体3に貼付されたRFIDタグ4の位置情報を、当該RFIDタグ4のID情報に関連づけて管理するものである。データ管理部114は、上記特定されたRFIDタグ4の位置情報を位置情報格納部108に格納して管理することとしてもよい。そして、位置特定システム10では、上記新たに管理されるRFIDタグ4の位置情報を、他の位置情報が未知のRFIDタグの位置を特定する際に利用することとしてもよい。情報処理装置100は、指定された物体3に貼付されたID情報に関連づけて管理される位置情報を取得して、当該取得した位置情報に画像を表示して物体3の位置を提示するようにしてもよい。
【0044】
図8には、位置特定システム10において行われる物体3の位置特定処理のフローチャートを示した。図8に示されるように、対象空間1内の複数の位置に位置特定用RFIDタグ2を配置し(S1)、各位置特定用RFIDタグ2の配置された位置情報を記憶しておく(S2)。
【0045】
次に、ユーザー6により携帯される無線タグリーダー5は所定周期で電波を送信して、対象空間1内に配置されたRFIDタグからタグ情報を取得し(S3)、取得したタグ情報をメモリに順次格納する(S4)。なお、タグ情報は、取得時刻、RFIDタグのID、無線タグリーダー5とRFIDタグとの距離を含む情報としてよい。
【0046】
情報処理装置100は、無線タグリーダー5に格納されたタグ情報を取得して(S5)、取得したタグ情報の中から、対象の物体3に貼付されたRFIDタグ4のIDと取得時刻が一致するタグ情報を抽出する(S6)。情報処理装置100は、抽出したタグ情報に基づき、取得時刻毎に位置特定用RFIDタグ2の位置と、位置特定用RFIDタグ2と無線タグリーダー5の距離とを用いて無線タグリーダー5の位置を特定する(S7)。次に、情報処理装置100は、異なる取得時刻毎の、無線タグリーダー5の位置と、無線タグリーダー5と対象のRFIDタグ4の距離とに基づいて、対象のRFIDタグ4の位置を特定する(S8)。
【0047】
以上説明した、本実施形態に係る位置特定システム10によれば、RFIDタグを予め対象空間1内の定められた位置に複数配置しておき、携帯型の無線タグリーダー5を用いて各RFIDタグから取得される情報を利用することで、位置情報が未知のRFIDタグについてもの位置情報を特定することができる。RFIDタグは外部からの電力供給を要さず、無線タグリーダー5に比べて小さいため、無線タグリーダー5を対象空間1内に複数配置する場合に比べて設置の制約が小さい。
【0048】
また、本実施形態では、1つの位置情報が未知のRFIDタグの位置を特定する処理を説明したが、複数の位置情報が未知のRFIDタグの位置をそれぞれ特定する場合にも、各々について同様の手順を実行することで各RFIDタグについての位置を特定することができる。
【0049】
また、本実施形態では、タグ情報を収集する無線タグリーダー5と、タグ情報を用いてRFIDタグの位置を特定する情報処理装置100とを別体として構成したが、無線タグリーダー5にRFIDタグの位置を特定する機能を搭載するように構成しても構わない。
【符号の説明】
【0050】
1 対象空間、2 位置特定用RFIDタグ、3 物体、4 RFIDタグ(対象RFIDタグ)、5 無線タグリーダー、6 ユーザー、10 位置特定システム、20 領域、50 無線通信部、52 タグ情報取得部、54 タグ情報格納部、56 データ転送部、100 情報処理装置、102 入力部、104 データ取得部、106 データ抽出部、108 位置情報格納部、110 リーダー位置特定部、112 タグ位置特定部、114 データ管理部。
【技術分野】
【0001】
本発明は、位置特定システム、位置特定装置、位置特定方法及びプログラムに関する。
【背景技術】
【0002】
物体の位置を特定する方法の1つに、GPS(Global Positioning System)がある。また、他の方法としては、下記の特許文献1に記載されているように、無線タグを物体に貼付して、物体に貼付された無線タグを位置が固定されている無線タグリーダーにより読み取ることで、物体のおおよその位置を特定することが考えられる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−36428号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、物体の大きさや用途によってはGPS機能を設けることは困難であるし、無線タグリーダーを複数設置するのには消費電力やコストがかかるほか、環境によっては無線タグリーダーを常時設置しておけないこともある。
【0005】
本発明の目的の一つは、消費電力やコストを抑え、無線タグリーダーを常時設置せずとも物体に貼付した無線タグの位置を特定することができる位置特定システム、位置特定装置、位置特定方法及びプログラムを提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の一態様に係る、位置特定システムは、空間に配置された複数の無線タグのそれぞれの位置情報を記憶する記憶手段と、前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する無線タグリーダーと、前記無線タグリーダーにより取得された、前記複数の無線タグのうち少なくとも3つからの距離と、前記記憶手段に記憶された当該各無線タグの位置情報とに基づいて、前記無線タグリーダーの位置を特定するリーダー位置特定手段と、前記無線タグリーダーが前記空間の複数の異なる位置にある場合に前記リーダー位置特定手段により特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定するタグ位置特定手段と、を含むことを特徴とする。
【0007】
また、本発明の一態様では、前記タグ位置特定手段は、前記無線タグリーダーが前記空間の少なくとも3つの異なる位置にある場合に前記リーダー位置特定手段により特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定することを特徴とする。
【0008】
また、本発明の一態様では、前記無線タグリーダーから出力される電波の強度を、所定の数の前記無線タグが識別されるように調整する手段をさらに含むことを特徴とする。
【0009】
また、本発明の一態様では、前記タグ位置特定手段により特定された前記対象無線タグの位置を前記記憶手段にさらに記憶させることを特徴とする。
【0010】
また、本発明の一態様では、前記無線タグリーダーは、所定の周期で前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得することを特徴とする。
【0011】
また、本発明の一態様に係る位置特定装置は、空間に配置された複数の無線タグのそれぞれの位置情報を記憶する記憶手段と、前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する無線タグリーダーにより取得された、前記複数の無線タグのうち少なくとも3つからの距離と、前記記憶手段に記憶された当該各無線タグの位置情報とに基づいて、前記無線タグリーダーの位置を特定するリーダー位置特定手段と、前記無線タグリーダーが前記空間の複数の異なる位置にある場合に前記リーダー位置特定手段により特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定するタグ位置特定手段と、を含むことを特徴とする。
【0012】
また、本発明の一態様に係る位置特定方法は、空間に配置された複数の無線タグのそれぞれの位置情報を記憶手段に記憶するステップと、前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を無線タグリーダーにより取得するステップと、前記無線タグリーダーにより取得された、前記複数の無線タグのうち少なくとも3つからの距離と、前記記憶手段に記憶された当該各無線タグの位置情報とに基づいて、前記無線タグリーダーの位置を特定するリーダー位置特定ステップと、前記無線タグリーダーが前記空間の複数の異なる位置にある場合に前記リーダー位置特定ステップで特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定するタグ位置特定ステップと、を含むことを特徴とする。
【0013】
また、本発明の一態様に係るプログラムは、コンピュータを、空間に配置された複数の無線タグのそれぞれの位置情報を記憶する記憶手段と、前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する無線タグリーダーにより取得された、前記複数の無線タグのうち少なくとも3つからの距離と、前記記憶手段に記憶された当該各無線タグの位置情報とに基づいて、前記無線タグリーダーの位置を特定するリーダー位置特定手段と、前記無線タグリーダーが前記空間の複数の異なる位置にある場合に前記リーダー位置特定手段により特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定するタグ位置特定手段として機能させるためのプログラムである。
【発明の効果】
【0014】
本発明の一態様によれば、消費電力やコストを抑え、無線タグリーダーを常時設置せずとも物体に貼付した無線タグの位置を特定することができる。
【0015】
本発明の一態様によれば、物体に貼付した無線タグの位置を精度良く特定することができる。
【0016】
本発明の一態様によれば、物体に貼付した無線タグの位置を特定するために必要なデータの収集を効率よく行うことができる。
【0017】
本発明の一態様によれば、物体に貼付した無線タグの位置を、他の位置情報が未知の無線タグの位置特定に利用することができる。
【0018】
本発明の一態様によれば、ユーザーが無線タグリーダーを手にして巡回することで、物体に貼付した無線タグの位置を特定するために必要なデータの収集を行うことができる。
【図面の簡単な説明】
【0019】
【図1】本実施形態に係る位置特定システムにより位置を特定する対象の物体が配置された空間の平面図である。
【図2】位置特定システムの機能ブロック図である。
【図3】タグ情報テーブルの一例を示す図である。
【図4】位置情報テーブルの一例を示す図である。
【図5】あるタイミングにおける、無線タグリーダー、物体、そして対象空間に配置された一部の位置特定用RFIDタグの位置関係を示す図である。
【図6】3つの異なるタイミングにおける、無線タグリーダー、物体の位置関係を示す図である。
【図7】物体に貼付されたRFIDタグの位置を特定するための他の方法を説明する図である。
【図8】位置特定処理のフローチャートである。
【発明を実施するための形態】
【0020】
以下、本発明を実施するための好適な実施の形態(以下、実施形態という)を、図面に従って説明する。
【0021】
図1は、本実施形態に係る位置特定システム10により位置を特定する対象の物体が配置された空間(対象空間1)の平面図である。対象空間1には、位置情報が予め定められたRFIDタグ(位置特定用RFIDタグ2)が複数配置されている。この位置特定用RFIDタグ2は、図1に示された例では対象空間1内に縦横に所定の間隔で配置されているが、これに限らず任意の位置に配置されることとしてよい。また、対象空間1がオフィス等であれば、位置特定用RFIDタグ2は、柱やデスク等の基準となる位置にそれぞれ配置することとしてもよい。
【0022】
対象空間1に配置された物体3には、ID情報が既知のRFIDタグが貼付されている。この物体3に貼付されたRFIDタグ4の位置情報は未知であり、本実施形態に係る位置特定システム10は物体3に貼付されたRFIDタグ4の位置情報を位置特定用RFIDタグ2から得られる情報に基づいて特定することとする。なお、上記の処理の詳細については後述する。また、本実施形態におけるRFIDタグには、無線タグリーダー5からの電波をエネルギー源として動作するパッシブタグを用いることとするが、アクティブタグを用いることとしても構わない。
【0023】
無線タグリーダー5は、所定の周期で電波を送信し、送信した電波に対するRFIDタグからの反応を受け取ることにより、無線タグリーダー5からの電波を受信可能な領域内に存在するRFIDタグの情報を取得するデバイスである。本実施形態では、無線タグリーダー5には携帯型のデバイスを用いることとし、ユーザー6は無線タグリーダー5を起動させた状態で無線タグリーダー5を手に対象空間1内を巡回する。この際、無線タグリーダー5は、対象空間1内の複数の各位置において、RFIDタグからの反応に基づく情報を取得し、当該取得した情報をメモリに記録していくこととする。
【0024】
図2には、位置特定システム10の機能ブロック図を示した。図2に示されるように、位置特定システム10は、無線タグリーダー5と情報処理装置100を含む。以下、各装置が備える機能の詳細について説明する。
【0025】
図2に示されるように、無線タグリーダー5は、無線通信部50、タグ情報取得部52、タグ情報格納部54、及びデータ転送部56を含む。以下、各部の機能の詳細について説明する。
【0026】
無線通信部50は、所定の周波数の電波を送受信するアンテナを含み、送信した電波に対するRFIDタグからの反射波を受信するものである。なお、RFIDタグからの反射波には、当該RFIDタグのID情報が乗せて返される。また、無線通信部50により出力される電波の強度は調整可能としてよく、例えば無線タグリーダー5の位置から所定の数(例えば4つ等)以上のRFIDタグの情報が平均的(時間的又は/及び空間的な平均であってよい)に取得されるように、電波の出力強度を調整することとしてよい。さらに、無線通信部50は、指定されたタイミングで電波を送信するようにしてもよいし、指定された時間間隔毎に順次電波を送信するようにしてもよい。
【0027】
タグ情報取得部52は、無線通信部50により送信された電波に対する対象空間1に配置された1又は複数のRFIDタグからの反射波に基づいて、各RFIDタグの情報(タグ情報)を取得するものである。本実施形態では、タグ情報は、情報の取得時刻、RFIDタグのID情報、RFIDタグまでの距離情報を含むデータとする。情報の取得時刻は、無線通信部50により反射波を受信した際の時間情報としてもよいし、電波を送信した際の時間情報としてもよい。また、RFIDタグのID情報は、受信した反射波に含まれるID情報を抽出して取得することとしてよい。そして、RFIDタグまでの距離情報は、無線タグリーダー5とRFIDタグとの距離を表すデータであり、例えば無線タグリーダー5による電波の送信時刻と、当該電波のRFIDタグからの反射波を受信した受信時刻とに基づいて算出することとしてもよいし、他の公知の手法を用いることとしてもよい。
【0028】
タグ情報格納部54は、例えば半導体メモリを含み、タグ情報取得部52により取得されたタグ情報が順次格納されるものである。
【0029】
図3には、タグ情報格納部54に格納されるタグ情報テーブルの一例を示す。図3に示されるように、タグ情報テーブルは、情報の取得時刻、RFIDタグのID情報、距離情報をそれぞれ対応づけて格納したテーブルとして構成されることとしてよい。
【0030】
データ転送部56は、例えばUSB等のシリアルインターフェースを含み、タグ情報格納部54に格納されたデータを読み出して外部の装置に転送するものである。
【0031】
次に、情報処理装置100に備えられた機能について説明する。図2に示されるように、情報処理装置100は、入力部102、データ取得部104、データ抽出部106、位置情報格納部108、リーダー位置特定部110、タグ位置特定部112、データ管理部114を含む。上記の各部の機能は、CPU等の制御手段、メモリ等の記憶手段、外部デバイスとデータを送受信する入出力手段等を備えたコンピュータが、コンピュータ読み取り可能な情報記憶媒体に格納されたプログラムを読み込み実行することで実現されるものとしてよい。なお、プログラムは情報記憶媒体によってコンピュータである情報処理装置100に供給されることとしてもよいし、インターネット等のデータ通信手段を介して供給されることとしてもよい。
【0032】
入力部102は、キーボードやマウス等の入力デバイスと接続する入力インターフェースを含み、入力デバイスから操作情報の入力を受け付けるものである。
【0033】
データ取得部104は、例えばUSB等のシリアルインターフェースを含み、データ転送部56から転送されるデータを取得するものである。
【0034】
データ抽出部106は、データ取得部104により取得したタグ情報の中から、物体3の位置特定に用いるタグ情報を抽出するものである。本実施形態では、例えば入力部102を介して位置を特定する対象の物体3に貼付されたRFIDタグ4のID情報が入力されると、当該入力されたID情報と同タイミングで取得されたRFIDタグについてのタグ情報を抽出することとする。
【0035】
位置情報格納部108は、例えば半導体メモリやハードディスクドライブ等の記憶装置を含み、対象空間1に配置された位置特定用RFIDタグ2のそれぞれの位置情報を格納するものである。本実施形態では、位置情報は、対象空間1の平面図について設定された二次元座標系における座標値(X座標,Y座標)を用いて表すこととするが、二次元座標に限らず三次元座標を用いて表すこととしても構わない。
【0036】
図4には、位置情報格納部108に格納される位置情報テーブルの一例を示した。図4に示されるように、位置情報テーブルは、位置特定用RFIDタグ2のID情報に関連づけて、位置情報(X座標,Y座標)が格納されたテーブルとして構成されるものである。
【0037】
リーダー位置特定部110は、データ抽出部106により抽出されたタグ情報に基づいて、無線タグリーダー5の位置情報を特定するものである。以下、図5を参照しながら、リーダー位置特定部110により行われる処理の具体例を説明する。
【0038】
図5は、あるタイミングにおける、無線タグリーダー5、物体3、そして対象空間1に配置された一部の位置特定用RFIDタグ2の位置関係を示す図である。リーダー位置特定部110は、抽出されたタグ情報のうち取得時刻が一致する(又は所定の時間範囲内にある)タグ情報に基づいて、当該取得時刻においてID情報が取得された位置特定用RFIDタグ2(例えばRFIDタグ(1,1),(2,1),(2,2)とする)の各々について位置情報格納部108に格納される位置情報と、無線タグリーダー5と各位置特定用RFIDタグ2とのそれぞれの距離に基づいて、無線タグリーダー5の位置を特定する。すなわち、リーダー位置特定部110は、RFIDタグ(1,1)から距離RAの円と、RFIDタグ(2,1)から距離RBの円と、RFIDタグ(2,2)から距離RCの円との交点の位置を求め、当該交点の位置を無線タグリーダー5の位置として得る。
【0039】
リーダー位置特定部110は、取得時刻が異なるタグ情報について上記の処理を行い、無線タグリーダー5の複数の異なる位置情報を得ることとする。なお、リーダー位置特定部110は、データ抽出部106により抽出されたタグ情報のうち、取得時刻が一致する(又は所定の時間範囲内にある)ものを選択し、当該選択されたタグ情報のうち位置特定用RFIDタグ2のデータを示すものの数が3以上である場合に、無線タグリーダー5の位置を算出する処理を行うこととしてよい。
【0040】
タグ位置特定部112は、リーダー位置特定部110により特定された無線タグリーダー5の複数の異なる位置情報と、当該各位置情報における無線タグリーダー5と物体3に貼付されたRFIDタグ4の距離情報に基づいて、物体3に貼付されたRFIDタグ4の位置(すなわち物体3の位置)を特定するものである。以下、図6を参照しながら、タグ位置特定部112による処理の具体例を説明する。
【0041】
図6には、3つの異なるタイミング(T1,T2,T3)における、無線タグリーダー5、物体3の位置関係を示す図である。なお、各タイミングにおける無線タグリーダー5の位置PT1,PT2,PT3は、それぞれ異なるものとする。そして、各タイミングにおいて、無線タグリーダー5の位置と、無線タグリーダー5と物体3に貼付されたRFIDタグ4との距離は分かっているため、タグ位置特定部112は、位置PT1の無線タグリーダー5から距離RT1の円と、位置PT2の無線タグリーダー5から距離RT2の円と、位置PT3の無線タグリーダー5から距離RT3の円との交点の位置を求め、当該交点の位置を物体3に貼付されたRFIDタグ4の位置として得る。
【0042】
図7には、物体3に貼付されたRFIDタグ4の位置を特定するための他の方法を説明する図を示した。図7には、2つの異なるタイミングにおける(T1,T2)、無線タグリーダー5、物体3、位置特定用RFIDタグ2の位置関係を示した。なお、各タイミングにおける無線タグリーダー5の位置PT1,PT2は、それぞれ異なるものとする。そして、各タイミングにおいて無線タグリーダー5の位置、及び無線タグリーダー5と物体3に貼付されたRFIDタグ4との距離は分かっており、物体3に貼付されたRFIDタグ4の存在領域は、無線タグリーダー5により識別された位置特定用RFIDタグ2により囲まれる領域20内にあると推定されるため、タグ位置特定部112は、領域20と、第1のタイミングT1における無線タグリーダー5の位置PT1から距離RT1にある円と、第2のタイミングT2における無線タグリーダー5の位置PT2から距離RT2にある円との交点を求めることで、当該交点の位置を物体3に貼付されたRFIDタグ4の位置として得る。
【0043】
データ管理部114は、タグ位置特定部112により特定された物体3に貼付されたRFIDタグ4の位置情報を、当該RFIDタグ4のID情報に関連づけて管理するものである。データ管理部114は、上記特定されたRFIDタグ4の位置情報を位置情報格納部108に格納して管理することとしてもよい。そして、位置特定システム10では、上記新たに管理されるRFIDタグ4の位置情報を、他の位置情報が未知のRFIDタグの位置を特定する際に利用することとしてもよい。情報処理装置100は、指定された物体3に貼付されたID情報に関連づけて管理される位置情報を取得して、当該取得した位置情報に画像を表示して物体3の位置を提示するようにしてもよい。
【0044】
図8には、位置特定システム10において行われる物体3の位置特定処理のフローチャートを示した。図8に示されるように、対象空間1内の複数の位置に位置特定用RFIDタグ2を配置し(S1)、各位置特定用RFIDタグ2の配置された位置情報を記憶しておく(S2)。
【0045】
次に、ユーザー6により携帯される無線タグリーダー5は所定周期で電波を送信して、対象空間1内に配置されたRFIDタグからタグ情報を取得し(S3)、取得したタグ情報をメモリに順次格納する(S4)。なお、タグ情報は、取得時刻、RFIDタグのID、無線タグリーダー5とRFIDタグとの距離を含む情報としてよい。
【0046】
情報処理装置100は、無線タグリーダー5に格納されたタグ情報を取得して(S5)、取得したタグ情報の中から、対象の物体3に貼付されたRFIDタグ4のIDと取得時刻が一致するタグ情報を抽出する(S6)。情報処理装置100は、抽出したタグ情報に基づき、取得時刻毎に位置特定用RFIDタグ2の位置と、位置特定用RFIDタグ2と無線タグリーダー5の距離とを用いて無線タグリーダー5の位置を特定する(S7)。次に、情報処理装置100は、異なる取得時刻毎の、無線タグリーダー5の位置と、無線タグリーダー5と対象のRFIDタグ4の距離とに基づいて、対象のRFIDタグ4の位置を特定する(S8)。
【0047】
以上説明した、本実施形態に係る位置特定システム10によれば、RFIDタグを予め対象空間1内の定められた位置に複数配置しておき、携帯型の無線タグリーダー5を用いて各RFIDタグから取得される情報を利用することで、位置情報が未知のRFIDタグについてもの位置情報を特定することができる。RFIDタグは外部からの電力供給を要さず、無線タグリーダー5に比べて小さいため、無線タグリーダー5を対象空間1内に複数配置する場合に比べて設置の制約が小さい。
【0048】
また、本実施形態では、1つの位置情報が未知のRFIDタグの位置を特定する処理を説明したが、複数の位置情報が未知のRFIDタグの位置をそれぞれ特定する場合にも、各々について同様の手順を実行することで各RFIDタグについての位置を特定することができる。
【0049】
また、本実施形態では、タグ情報を収集する無線タグリーダー5と、タグ情報を用いてRFIDタグの位置を特定する情報処理装置100とを別体として構成したが、無線タグリーダー5にRFIDタグの位置を特定する機能を搭載するように構成しても構わない。
【符号の説明】
【0050】
1 対象空間、2 位置特定用RFIDタグ、3 物体、4 RFIDタグ(対象RFIDタグ)、5 無線タグリーダー、6 ユーザー、10 位置特定システム、20 領域、50 無線通信部、52 タグ情報取得部、54 タグ情報格納部、56 データ転送部、100 情報処理装置、102 入力部、104 データ取得部、106 データ抽出部、108 位置情報格納部、110 リーダー位置特定部、112 タグ位置特定部、114 データ管理部。
【特許請求の範囲】
【請求項1】
空間に配置された複数の無線タグのそれぞれの位置情報を記憶する記憶手段と、
前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する無線タグリーダーと、
前記無線タグリーダーにより取得された、前記複数の無線タグのうち少なくとも3つからの距離と、前記記憶手段に記憶された当該各無線タグの位置情報とに基づいて、前記無線タグリーダーの位置を特定するリーダー位置特定手段と、
前記無線タグリーダーが前記空間の複数の異なる位置にある場合に前記リーダー位置特定手段により特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定するタグ位置特定手段と、
を含むことを特徴とする位置特定システム。
【請求項2】
前記タグ位置特定手段は、前記無線タグリーダーが前記空間の少なくとも3つの異なる位置にある場合に前記リーダー位置特定手段により特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定する
ことを特徴とする請求項1に記載の位置特定システム。
【請求項3】
前記無線タグリーダーから出力される電波の強度を、所定の数の前記無線タグが識別されるように調整する手段をさらに含む
ことを特徴とする請求項1又は2に記載の位置特定システム。
【請求項4】
前記タグ位置特定手段により特定された前記対象無線タグの位置を前記記憶手段にさらに記憶させる
ことを特徴とする請求項1乃至3のいずれかに記載の位置特定システム。
【請求項5】
前記無線タグリーダーは、所定の周期で前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する
ことを特徴とする請求項1乃至4のいずれかに記載の位置特定システム。
【請求項6】
空間に配置された複数の無線タグのそれぞれの位置情報を記憶する記憶手段と、
前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する無線タグリーダーにより取得された、前記複数の無線タグのうち少なくとも3つからの距離と、前記記憶手段に記憶された当該各無線タグの位置情報とに基づいて、前記無線タグリーダーの位置を特定するリーダー位置特定手段と、
前記無線タグリーダーが前記空間の複数の異なる位置にある場合に前記リーダー位置特定手段により特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定するタグ位置特定手段と、
を含むことを特徴とする位置特定装置。
【請求項7】
空間に配置された複数の無線タグのそれぞれの位置情報を記憶手段に記憶するステップと、
前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を無線タグリーダーにより取得するステップと、
前記無線タグリーダーにより取得された、前記複数の無線タグのうち少なくとも3つからの距離と、前記記憶手段に記憶された当該各無線タグの位置情報とに基づいて、前記無線タグリーダーの位置を特定するリーダー位置特定ステップと、
前記無線タグリーダーが前記空間の複数の異なる位置にある場合に前記リーダー位置特定ステップで特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定するタグ位置特定ステップと、
を含むことを特徴とする位置特定方法。
【請求項8】
コンピュータを、
空間に配置された複数の無線タグのそれぞれの位置情報を記憶する記憶手段と、
前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する無線タグリーダーにより取得された、前記複数の無線タグのうち少なくとも3つからの距離と、前記記憶手段に記憶された当該各無線タグの位置情報とに基づいて、前記無線タグリーダーの位置を特定するリーダー位置特定手段と、
前記無線タグリーダーが前記空間の複数の異なる位置にある場合に前記リーダー位置特定手段により特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定するタグ位置特定手段として機能させるためのプログラム。
【請求項1】
空間に配置された複数の無線タグのそれぞれの位置情報を記憶する記憶手段と、
前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する無線タグリーダーと、
前記無線タグリーダーにより取得された、前記複数の無線タグのうち少なくとも3つからの距離と、前記記憶手段に記憶された当該各無線タグの位置情報とに基づいて、前記無線タグリーダーの位置を特定するリーダー位置特定手段と、
前記無線タグリーダーが前記空間の複数の異なる位置にある場合に前記リーダー位置特定手段により特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定するタグ位置特定手段と、
を含むことを特徴とする位置特定システム。
【請求項2】
前記タグ位置特定手段は、前記無線タグリーダーが前記空間の少なくとも3つの異なる位置にある場合に前記リーダー位置特定手段により特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定する
ことを特徴とする請求項1に記載の位置特定システム。
【請求項3】
前記無線タグリーダーから出力される電波の強度を、所定の数の前記無線タグが識別されるように調整する手段をさらに含む
ことを特徴とする請求項1又は2に記載の位置特定システム。
【請求項4】
前記タグ位置特定手段により特定された前記対象無線タグの位置を前記記憶手段にさらに記憶させる
ことを特徴とする請求項1乃至3のいずれかに記載の位置特定システム。
【請求項5】
前記無線タグリーダーは、所定の周期で前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する
ことを特徴とする請求項1乃至4のいずれかに記載の位置特定システム。
【請求項6】
空間に配置された複数の無線タグのそれぞれの位置情報を記憶する記憶手段と、
前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する無線タグリーダーにより取得された、前記複数の無線タグのうち少なくとも3つからの距離と、前記記憶手段に記憶された当該各無線タグの位置情報とに基づいて、前記無線タグリーダーの位置を特定するリーダー位置特定手段と、
前記無線タグリーダーが前記空間の複数の異なる位置にある場合に前記リーダー位置特定手段により特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定するタグ位置特定手段と、
を含むことを特徴とする位置特定装置。
【請求項7】
空間に配置された複数の無線タグのそれぞれの位置情報を記憶手段に記憶するステップと、
前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を無線タグリーダーにより取得するステップと、
前記無線タグリーダーにより取得された、前記複数の無線タグのうち少なくとも3つからの距離と、前記記憶手段に記憶された当該各無線タグの位置情報とに基づいて、前記無線タグリーダーの位置を特定するリーダー位置特定ステップと、
前記無線タグリーダーが前記空間の複数の異なる位置にある場合に前記リーダー位置特定ステップで特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定するタグ位置特定ステップと、
を含むことを特徴とする位置特定方法。
【請求項8】
コンピュータを、
空間に配置された複数の無線タグのそれぞれの位置情報を記憶する記憶手段と、
前記空間に配置された位置情報が未知の対象無線タグと、前記複数の無線タグのうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する無線タグリーダーにより取得された、前記複数の無線タグのうち少なくとも3つからの距離と、前記記憶手段に記憶された当該各無線タグの位置情報とに基づいて、前記無線タグリーダーの位置を特定するリーダー位置特定手段と、
前記無線タグリーダーが前記空間の複数の異なる位置にある場合に前記リーダー位置特定手段により特定された各位置と、当該各位置からの前記対象無線タグの距離とに基づいて、前記対象無線タグの位置を特定するタグ位置特定手段として機能させるためのプログラム。
【図1】



【図2】
【図3】

【図4】
【図5】

【図6】
【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−145093(P2011−145093A)
【公開日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願番号】特願2010−4017(P2010−4017)
【出願日】平成22年1月12日(2010.1.12)
【出願人】(593063161)株式会社NTTファシリティーズ (475)
【Fターム(参考)】
【公開日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願日】平成22年1月12日(2010.1.12)
【出願人】(593063161)株式会社NTTファシリティーズ (475)
【Fターム(参考)】
[ Back to top ]