
位置特定システム
【課題】航空機から送信された信号の反射信号を利用して航空機の飛行を監視する。
【解決手段】位置特定システムは、複数の距離測定装置と位置特定装置とを備える。各距離測定装置の送信手段は、信号を送信する。各距離測定装置の相関処理手段は、送信手段が送信した信号が航空機に反射した反射信号を受信し、送信手段からの信号の送信時刻と当該信号が反射した反射信号の受信時刻との相関を求める。位置特定装置の入力手段は、複数の距離測定装置から相関結果を入力する。位置特定装置の特定手段は、入力手段が入力した相関結果から求められる各距離測定装置と航空機との距離を利用して当該航空機の位置を特定する。
【解決手段】位置特定システムは、複数の距離測定装置と位置特定装置とを備える。各距離測定装置の送信手段は、信号を送信する。各距離測定装置の相関処理手段は、送信手段が送信した信号が航空機に反射した反射信号を受信し、送信手段からの信号の送信時刻と当該信号が反射した反射信号の受信時刻との相関を求める。位置特定装置の入力手段は、複数の距離測定装置から相関結果を入力する。位置特定装置の特定手段は、入力手段が入力した相関結果から求められる各距離測定装置と航空機との距離を利用して当該航空機の位置を特定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、距離測定装置から送信されて航空機で反射した反射信号を受信して航空機の位置を特定する位置特定システムに関する。
【背景技術】
【0002】
航空機が位置を特定するための装置として、距離測定装置(DME:Distance Measuring Equipment)が利用されることがある。距離測定装置を利用する場合、航空機は、所定の周波数でツインパルス(質問)を送信する。距離測定装置は、航空機から送信されたツインパルスを受信すると、ツインパルスの受信から所定時間経過後に質問と異なる周波数で応答のツインパルスを送信する。距離測定装置から送信された応答のツインパルスを受信した航空機は、ツインパルスの送信時刻と応答のツインパルスの受信時刻との時間間隔を利用して航空機から距離測定装置までの距離を求めることができる。
【0003】
一組のツインパルスからは、航空機と距離測定装置との距離のみを測定することができるが、航空機は、複数組のツインパルスを利用することで、航空機の位置を測定することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−222592号公報
【特許文献2】特開2008−298596号公報
【非特許文献】
【0005】
【非特許文献1】“Aeronautical Telecommunications,ANNEX10,VOLUMEIV”,Surveillance Radar and Collision Avoidance Systems,1996年7月,ICAO
【発明の概要】
【発明が解決しようとする課題】
【0006】
これに対し、距離測定装置では、航空機からツインパルスが送信されたことを把握することはできるが、航空機の飛行に関するその他の情報を得ることはできなかった。したがって、地上では、距離測定装置における信号の送受信によって何らかの情報を取得することはできなかった。
【課題を解決するための手段】
【0007】
本発明の実施形態に係る位置特定システムは、複数の距離測定装置と位置特定装置とを備える。各距離測定装置の送信手段は、信号を送信する。各距離測定装置の相関処理手段は、送信手段が送信した信号が航空機に反射した反射信号を受信し、送信手段からの信号の送信時刻と当該信号が反射した反射信号の受信時刻との相関を求める。位置特定装置の入力手段は、複数の距離測定装置から相関結果を入力する。位置特定装置の特定手段は、入力手段が入力した相関結果から求められる各距離測定装置と航空機との距離を利用して当該航空機の位置を特定する。
【図面の簡単な説明】
【0008】
【図1】実施形態に係る位置特定システムを説明する概略図である。
【図2】図1の位置特定システムが有する距離測定装置と航空機との信号の送受信を説明する概略図である。
【図3】図1の位置特定システムが有する距離測定装置の構成を説明するブロック図である。
【図4】図1の位置特定システムにおける航空機の位置の特定を説明する概略図である。
【発明を実施するための形態】
【0009】
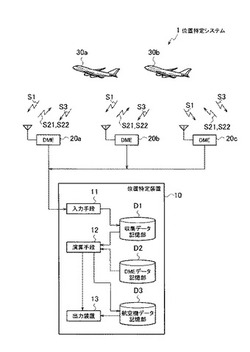
以下に、図面を用いて実施形態に係る位置特定システムについて説明する。実施形態に係る位置特定システム1は、航空機30a,30bから送信されたツインパルス(質問パルス)S1に応答してツインパルス(応答パルス)S21を送信するとともに、航空機30a,30bで応答パルスS21が反射された反射信号S3を受信する距離測定装置(DME)20a〜20cと、距離測定装置20a〜20cにおける反射信号S3の受信状況を利用して航空機30a,30bの位置を特定する位置特定装置10とを備えている。また、距離測定装置20a〜20cでは、質問パルスS1を受信しない場合にも、規定数の信号を送信するように、ツインパルス(スキッタ)S22を送信している。
【0010】
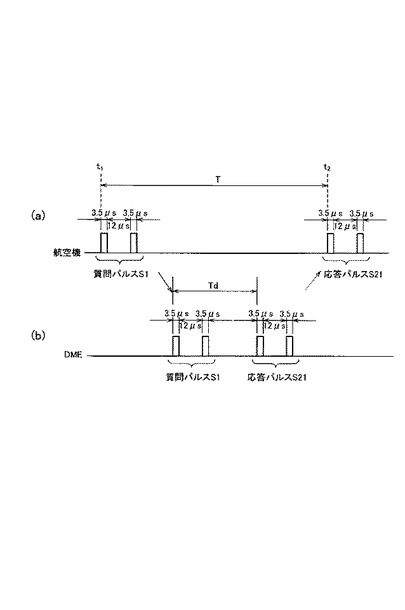
航空機30a,30bは、図2に示すように、質問パルスS1として、パルス幅が3.5μsで、パルス間隔が12μsのツインパルスを送信する。また、距離測定装置20a〜20cは、それぞれ、質問パルスS1を受信すると、この質問パルスS1の受信から所定時間(Td)経過後、質問パルスS1と同一フォーマットの応答パルスS21を質問パルスS1とは異なる周波数で生成し、送信する。航空機30a,30bは、応答パルスS21を受信すると、質問パルスS1送信時刻t1から応答パルスS21の受信時刻t2の時間間隔(T)を用いて距離測定装置20a〜20cとの距離を測定する。
【0011】
図2では省略しているが、航空機30a,30bは、応答パルスS21を受信する他、機体で応答パルスS21やスキッタS22を反射信号S3として反射する。実施形態に係る位置特定システム1の距離測定装置20a〜20cは、このような航空機30a,30bが反射した反射信号S3を受信して処理する。ここで、質問パルスS1と反射信号S3とを比較すると、質問パルスS1は航空機30a,30bで生成されて送信された信号であるのに対し、反射信号S3は距離測定装置20aから送信された応答パルスS2が航空機30a,30bで反射された信号である。したがって、両信号のフォーマットは同一であるが周波数が異なり、質問パルスS1に比較して、反射信号S3の方が電力が小さくなる。
【0012】
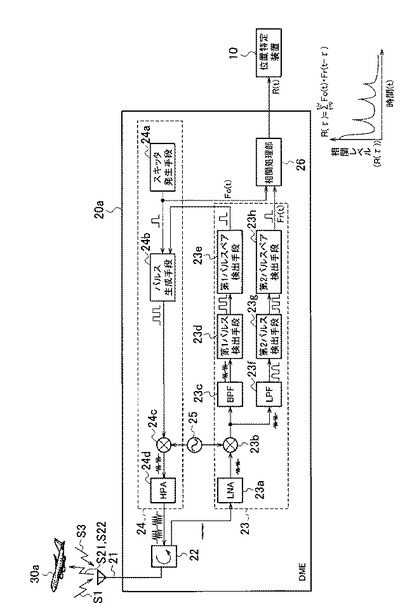
具体的には、距離測定装置20aは、図3に示すように、受信した質問パルスS1及び反射信号S3を処理する受信処理部23と、質問パルスS1に応答する応答パルスS21及びスキッタS22の送信を処理する送信処理部24とを備えている。
【0013】
距離測定装置20aは、航空機30aから送信された質問パルスS1又は航空機30aで反射された反射信号S3を受信信号としてアンテナ21で受信すると、サーキュレータ22を介して送信処理部24に入力する。
【0014】
受信処理部23では、ローノイズアンプ(LNA)23aが、入力した受信信号を増幅する。ミキサ23bは、LNAで増幅された受信信号を発振器25から出力される周波数信号と混合検波する。バンドパスフィルタ(BPF)23cは、ミキサ23bで周波数信号と混合された受信信号を帯域調整する。このバンドパスフィルタ23cは、質問パルスS1に対応する規定の周波数に合わせて受信信号を帯域調整する。第1パルス検出手段23dは、バンドパスフィルタ23cで調整された受信信号から、パルスを検出する。第1パルスペア検出手段23eは、第1パルス検出手段23dで検出された受信信号の各パルスから、質問パルスS1のフォーマットに該当するツインパルス(パルスペア)の有無を検出する。すなわち、バンドパスフィルタ23cでは、質問パルスS1に合わせて帯域調整されているため、第1パルスペア検出手段23eで検出されるツインパルス(は、反射信号S3ではなく、質問パルスS1のみとなる。質問パルスS1のフォーマットのツインパルスを検出すると、応答パルスS21の送信タイミングの基準とするため、ツインパルスの検出有の信号を送信処理部24に出力する。
【0015】
また、受信処理部23では、ローパスフィルタ(LPF)23fが、ミキサ23bで周波数信号と混合された受信信号を帯域調整する。このローパスフィルタ23fは、反射信号S3に対応する周波数に合わせて受信信号を帯域調整する。第2パルス検出手段23gは、ローパスフィルタ23fで調整された受信信号から、パルスを検出する。第2パルスペア検出手段23hは、第2パルス検出手段23gで検出された受信信号の各パルスから、反射信号S3のフォーマットに該当するツインパルスの有無を検出する。ここで、上述したように、反射信号S3は、応答パルスS21が反射した信号であるため、反射信号S3のフォーマットは、質問パルスS1及び応答パルスS21のフォーマットと同一である。また、ローパスフィルタ23fでは、反射信号S3に合わせて帯域調整されているため、第2パルスペア検出手段23hで検出されるツインパルスは、質問パルスS1ではなく、反射信号S3のみとなる。
【0016】
送信処理部24では、スキッタ発生手段24aで、スキッタS22の送信タイミングを発生する。すなわち、距離測定装置20aでは、質問パルスS1を受信しない場合にも、ランダムな間隔で、毎秒700〜1200の信号(スキッタ)S22を送信することが規定されている。したがって、スキッタ発生手段24aは、このスキッタS22の送信タイミングを発生する。なお、スキッタS22は、応答パルスS21と同一のフォーマットである
パルス生成手段24bは、受信処理部23の第1パルスペア検出手段23eで質問パルスS1の受信が検出された所定時間経過後に、応答パルスS21であるツインパルスを生成する。または、パルス生成手段24bは、質問パルスS1の受信が検出されない場合は、スキッタ発生手段24aは、ランダムなタイミングで、スキッタS22であるツインパルスを生成する。
【0017】
ミキサ24cは、パルス生成手段24bで生成されたツインパルスを発振器25から出力される周波数信号と混合変調する。ハイパワーアンプ(HPA)24dは、ミキサ24cで変調された応答パルスS21又はスキッタS22を送信信号の電力に増幅する。ハイパワーアンプ24dで増幅された応答パルスS21又はスキッタS22は、サーキュレータ22及びアンテナ21を介して航空機30aに送信される。
【0018】
相関処理部26は、送信処理部24のスキッタ発生手段24aでランダムなタイミングで発生したのパルス列と、第2パルスペア検出手段23hでツインパルスが検出されたパルス列との相関を求め、処理結果として位置特定装置10に出力する。具体的には、相関処理部26は、スキッタS22がn回送信された一定期間のパルス列の相関を、時間(τ)と相関レベル(R)との関係で求める。このとき、相関処理部26は、スキッタ発生手段24aの出力をfo(t)、第2パルスペア検出手段23hの出力をfr(t)とすると、R(τ)=Σ(fo(t)・fr(t−τ))(t=0〜n)を演算する。なお、tは、パルス列の位置(時間)を表す。また、R(t)は、相関の強さを表し、τは、スキッタとしての応答パルスS1が送信されてから反射信号S3が受信されるまでの遅延時間を表す。
【0019】
したがって、R(τ)のレベルが高い部分は、距離測定装置20aが送信したスキッタS22がτだけ遅れたことを表している。このτは、距離測定装置20aからスキッタS22が送信され、航空機30aでスキッタS22が反射して反射信号S3として距離測定装置20aに戻った往復時間ということになる。そのため、電波の往復の伝播時間であるため、距離に換算することができる。
【0020】
図3では、距離測定装置20aを例として示したが、他の距離測定装置20b,20cも距離測定装置20aと同一の構成であって、質問パルスS1及び反射信号S3を受信するとともに、応答パルスS21及びスキッタS22を送信し、またスキッタS2Sとその反射信号S3との相関結果を位置特定装置10に出力する。
【0021】
位置特定装置10は、相関処理部26から出力された相関結果を入力すると、スキッタS22を送信した距離測定装置20aと、スキッタS22を反射した航空機30aとの距離を求め、このスキッタS22を反射した航空機30aの位置を特定する。ここで、単一の距離測定装置20aで求められた距離のみでは航空機30aの位置を特定することはできない。したがって、図1に示すように、位置特定装置10は、複数の距離測定装置20a〜20cと接続されており、複数の距離測定装置20a〜20cで得られた航空機30a,30bとの距離から、各航空機30a,30bの位置を特定することができる。
【0022】
位置特定装置10は、距離測定装置20a〜20cから距離の処理結果を入力する入力手段11と、距離測定装置20a〜20cと航空機30a,30bとの距離を利用して航空機30a,30bの位置を求める演算手段12と、求められた位置を出力する出力装置13とを備えている。また、位置特定装置10は、収拾データを記憶する収集データ記憶部D1、DMEデータを記憶するDMEデータ記憶部D2及び航空機データを記憶する航空機データ記憶部D3を備えている。
【0023】
入力手段11は、距離測定装置20a〜20cから距離の処理結果を入力すると、入力した処理結果から、距離測定装置20a〜20cと信号を反射した航空機との距離を求め、収集データ記憶部D1で記憶される収集データに求めた距離データを追加する。また、入力手段11は、収集データに含まれる距離データから不要なデータを削除し、収集データを定期的に更新する。
【0024】
収集データ記憶部D1に記憶される収集データは、距離測定装置20a〜20cの処理結果から得られた距離測定装置20a〜20cと航空機30a,30bとの距離のリストである。この収集データには、航空機30a,30bの位置の演算に有効な距離データのみを有していればよいため、追加後、所定期間が経過した距離データは、入力手段11によって削除される。すなわち、飛行中の航空機30a,30bは位置が変化するため、最新の距離データのみが有効なデータとなるためである。
【0025】
DMEデータ記憶部D2で記憶されるDMEデータは、位置特定装置10と接続される距離測定装置20a〜20cの位置に関するデータである。
【0026】
演算手段12は、収集データ記憶部D1から収集データを読みだすとともに、DMEデータ記憶部D2からDMEデータ読み出し、各距離測定装置20a〜20cの位置と、各距離測定装置20a〜20cから航空機30a,30bまでの距離を利用して、航空機30a,30bの位置を求める。また、演算手段12は、求めた航空機30a,30bの位置を航空機データ記憶部D3に記憶させる。
【0027】
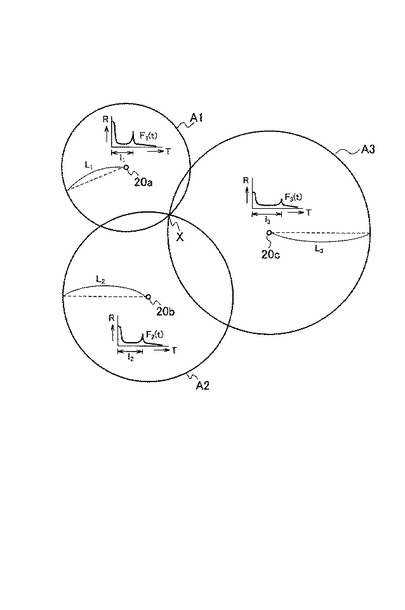
例えば、図4に示すように、それぞれ距離測定装置20a〜20cから求められた処理結果の遅延時間がl1,l2,l3であり、これから求められた距離測定装置20aと航空機30aとの距離がL1、距離測定装置20bと航空機30aとの距離がL2、距離測定装置20cと航空機30aとの距離がL3であるとする。この場合、演算手段12は、距離測定装置20aから距離L1、距離測定装置20bから距離L2、かつ距離測定装置20cから距離L3の地点Xを求め、この地点Xを航空機30aの位置として特定する。
【0028】
航空機データ記憶部D3で記憶される航空機データは、演算手段12で特定された航空機30a,30bの位置を含むデータである。反射信号S3には航空機30a,30bの識別子は含まれていないが、例えば、航空機データに含まれる航空機30a,30bの位置をプロットすることで、航空機30a,30bの飛行の軌跡を把握することができる。
【0029】
出力装置13は、例えば、演算手段12の演算結果や、航空機データを出力するディスプレイやプリンタである。
【0030】
上述したように、実施形態に係る位置特定システム1では、地上の距離測定装置20a〜20cで自ら送信したスキッタS21の反射信号S3を受信し、送信したスキッタS21との相関を求める。また、位置特定装置10で、距離測定装置20a〜20cにおけるスキッタS22の送信と反射信号S3の受信の相関に応じて航空機30a,30bの位置を特定する。すなわち、位置特定システム1では、航空機30a,30bによる反射信号S3を利用して、航空機30a,30bの位置を特定することができる。
【0031】
上記のように、本発明を実施形態によって記載したが、この開示の一部をなす論述および図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施形態、実施例および運用技術が明らかとなる。また、本発明はここでは記載していない様々な実施形態等を含むことは勿論である。
【符号の説明】
【0032】
1…位置特定システム
10…位置特定装置
11…入力手段
12…演算手段
13…出力装置
D1…収集データ記憶部
D2…DMEデータ記憶部
D3…航空機データ記憶部
20a〜20c…距離測定装置
21…アンテナ
22…サーキュレータ
23…受信処理部
23b…ミキサ
23c…バンドパスフィルタ
23d…第1パルス検出手段
23e…第1パルスペア検出手段
23f…ローパスフィルタ
23g…第2パルス検出手段
23h…第2パルスペア検出手段
24…送信処理部
24a…スキッタ発生手段
24b…パルス生成手段
24c…ミキサ
24d…ハイパワーアンプ
25…発振器
26…相関処理部
30a,30b…航空機
【技術分野】
【0001】
本発明の実施形態は、距離測定装置から送信されて航空機で反射した反射信号を受信して航空機の位置を特定する位置特定システムに関する。
【背景技術】
【0002】
航空機が位置を特定するための装置として、距離測定装置(DME:Distance Measuring Equipment)が利用されることがある。距離測定装置を利用する場合、航空機は、所定の周波数でツインパルス(質問)を送信する。距離測定装置は、航空機から送信されたツインパルスを受信すると、ツインパルスの受信から所定時間経過後に質問と異なる周波数で応答のツインパルスを送信する。距離測定装置から送信された応答のツインパルスを受信した航空機は、ツインパルスの送信時刻と応答のツインパルスの受信時刻との時間間隔を利用して航空機から距離測定装置までの距離を求めることができる。
【0003】
一組のツインパルスからは、航空機と距離測定装置との距離のみを測定することができるが、航空機は、複数組のツインパルスを利用することで、航空機の位置を測定することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−222592号公報
【特許文献2】特開2008−298596号公報
【非特許文献】
【0005】
【非特許文献1】“Aeronautical Telecommunications,ANNEX10,VOLUMEIV”,Surveillance Radar and Collision Avoidance Systems,1996年7月,ICAO
【発明の概要】
【発明が解決しようとする課題】
【0006】
これに対し、距離測定装置では、航空機からツインパルスが送信されたことを把握することはできるが、航空機の飛行に関するその他の情報を得ることはできなかった。したがって、地上では、距離測定装置における信号の送受信によって何らかの情報を取得することはできなかった。
【課題を解決するための手段】
【0007】
本発明の実施形態に係る位置特定システムは、複数の距離測定装置と位置特定装置とを備える。各距離測定装置の送信手段は、信号を送信する。各距離測定装置の相関処理手段は、送信手段が送信した信号が航空機に反射した反射信号を受信し、送信手段からの信号の送信時刻と当該信号が反射した反射信号の受信時刻との相関を求める。位置特定装置の入力手段は、複数の距離測定装置から相関結果を入力する。位置特定装置の特定手段は、入力手段が入力した相関結果から求められる各距離測定装置と航空機との距離を利用して当該航空機の位置を特定する。
【図面の簡単な説明】
【0008】
【図1】実施形態に係る位置特定システムを説明する概略図である。
【図2】図1の位置特定システムが有する距離測定装置と航空機との信号の送受信を説明する概略図である。
【図3】図1の位置特定システムが有する距離測定装置の構成を説明するブロック図である。
【図4】図1の位置特定システムにおける航空機の位置の特定を説明する概略図である。
【発明を実施するための形態】
【0009】
以下に、図面を用いて実施形態に係る位置特定システムについて説明する。実施形態に係る位置特定システム1は、航空機30a,30bから送信されたツインパルス(質問パルス)S1に応答してツインパルス(応答パルス)S21を送信するとともに、航空機30a,30bで応答パルスS21が反射された反射信号S3を受信する距離測定装置(DME)20a〜20cと、距離測定装置20a〜20cにおける反射信号S3の受信状況を利用して航空機30a,30bの位置を特定する位置特定装置10とを備えている。また、距離測定装置20a〜20cでは、質問パルスS1を受信しない場合にも、規定数の信号を送信するように、ツインパルス(スキッタ)S22を送信している。
【0010】
航空機30a,30bは、図2に示すように、質問パルスS1として、パルス幅が3.5μsで、パルス間隔が12μsのツインパルスを送信する。また、距離測定装置20a〜20cは、それぞれ、質問パルスS1を受信すると、この質問パルスS1の受信から所定時間(Td)経過後、質問パルスS1と同一フォーマットの応答パルスS21を質問パルスS1とは異なる周波数で生成し、送信する。航空機30a,30bは、応答パルスS21を受信すると、質問パルスS1送信時刻t1から応答パルスS21の受信時刻t2の時間間隔(T)を用いて距離測定装置20a〜20cとの距離を測定する。
【0011】
図2では省略しているが、航空機30a,30bは、応答パルスS21を受信する他、機体で応答パルスS21やスキッタS22を反射信号S3として反射する。実施形態に係る位置特定システム1の距離測定装置20a〜20cは、このような航空機30a,30bが反射した反射信号S3を受信して処理する。ここで、質問パルスS1と反射信号S3とを比較すると、質問パルスS1は航空機30a,30bで生成されて送信された信号であるのに対し、反射信号S3は距離測定装置20aから送信された応答パルスS2が航空機30a,30bで反射された信号である。したがって、両信号のフォーマットは同一であるが周波数が異なり、質問パルスS1に比較して、反射信号S3の方が電力が小さくなる。
【0012】
具体的には、距離測定装置20aは、図3に示すように、受信した質問パルスS1及び反射信号S3を処理する受信処理部23と、質問パルスS1に応答する応答パルスS21及びスキッタS22の送信を処理する送信処理部24とを備えている。
【0013】
距離測定装置20aは、航空機30aから送信された質問パルスS1又は航空機30aで反射された反射信号S3を受信信号としてアンテナ21で受信すると、サーキュレータ22を介して送信処理部24に入力する。
【0014】
受信処理部23では、ローノイズアンプ(LNA)23aが、入力した受信信号を増幅する。ミキサ23bは、LNAで増幅された受信信号を発振器25から出力される周波数信号と混合検波する。バンドパスフィルタ(BPF)23cは、ミキサ23bで周波数信号と混合された受信信号を帯域調整する。このバンドパスフィルタ23cは、質問パルスS1に対応する規定の周波数に合わせて受信信号を帯域調整する。第1パルス検出手段23dは、バンドパスフィルタ23cで調整された受信信号から、パルスを検出する。第1パルスペア検出手段23eは、第1パルス検出手段23dで検出された受信信号の各パルスから、質問パルスS1のフォーマットに該当するツインパルス(パルスペア)の有無を検出する。すなわち、バンドパスフィルタ23cでは、質問パルスS1に合わせて帯域調整されているため、第1パルスペア検出手段23eで検出されるツインパルス(は、反射信号S3ではなく、質問パルスS1のみとなる。質問パルスS1のフォーマットのツインパルスを検出すると、応答パルスS21の送信タイミングの基準とするため、ツインパルスの検出有の信号を送信処理部24に出力する。
【0015】
また、受信処理部23では、ローパスフィルタ(LPF)23fが、ミキサ23bで周波数信号と混合された受信信号を帯域調整する。このローパスフィルタ23fは、反射信号S3に対応する周波数に合わせて受信信号を帯域調整する。第2パルス検出手段23gは、ローパスフィルタ23fで調整された受信信号から、パルスを検出する。第2パルスペア検出手段23hは、第2パルス検出手段23gで検出された受信信号の各パルスから、反射信号S3のフォーマットに該当するツインパルスの有無を検出する。ここで、上述したように、反射信号S3は、応答パルスS21が反射した信号であるため、反射信号S3のフォーマットは、質問パルスS1及び応答パルスS21のフォーマットと同一である。また、ローパスフィルタ23fでは、反射信号S3に合わせて帯域調整されているため、第2パルスペア検出手段23hで検出されるツインパルスは、質問パルスS1ではなく、反射信号S3のみとなる。
【0016】
送信処理部24では、スキッタ発生手段24aで、スキッタS22の送信タイミングを発生する。すなわち、距離測定装置20aでは、質問パルスS1を受信しない場合にも、ランダムな間隔で、毎秒700〜1200の信号(スキッタ)S22を送信することが規定されている。したがって、スキッタ発生手段24aは、このスキッタS22の送信タイミングを発生する。なお、スキッタS22は、応答パルスS21と同一のフォーマットである
パルス生成手段24bは、受信処理部23の第1パルスペア検出手段23eで質問パルスS1の受信が検出された所定時間経過後に、応答パルスS21であるツインパルスを生成する。または、パルス生成手段24bは、質問パルスS1の受信が検出されない場合は、スキッタ発生手段24aは、ランダムなタイミングで、スキッタS22であるツインパルスを生成する。
【0017】
ミキサ24cは、パルス生成手段24bで生成されたツインパルスを発振器25から出力される周波数信号と混合変調する。ハイパワーアンプ(HPA)24dは、ミキサ24cで変調された応答パルスS21又はスキッタS22を送信信号の電力に増幅する。ハイパワーアンプ24dで増幅された応答パルスS21又はスキッタS22は、サーキュレータ22及びアンテナ21を介して航空機30aに送信される。
【0018】
相関処理部26は、送信処理部24のスキッタ発生手段24aでランダムなタイミングで発生したのパルス列と、第2パルスペア検出手段23hでツインパルスが検出されたパルス列との相関を求め、処理結果として位置特定装置10に出力する。具体的には、相関処理部26は、スキッタS22がn回送信された一定期間のパルス列の相関を、時間(τ)と相関レベル(R)との関係で求める。このとき、相関処理部26は、スキッタ発生手段24aの出力をfo(t)、第2パルスペア検出手段23hの出力をfr(t)とすると、R(τ)=Σ(fo(t)・fr(t−τ))(t=0〜n)を演算する。なお、tは、パルス列の位置(時間)を表す。また、R(t)は、相関の強さを表し、τは、スキッタとしての応答パルスS1が送信されてから反射信号S3が受信されるまでの遅延時間を表す。
【0019】
したがって、R(τ)のレベルが高い部分は、距離測定装置20aが送信したスキッタS22がτだけ遅れたことを表している。このτは、距離測定装置20aからスキッタS22が送信され、航空機30aでスキッタS22が反射して反射信号S3として距離測定装置20aに戻った往復時間ということになる。そのため、電波の往復の伝播時間であるため、距離に換算することができる。
【0020】
図3では、距離測定装置20aを例として示したが、他の距離測定装置20b,20cも距離測定装置20aと同一の構成であって、質問パルスS1及び反射信号S3を受信するとともに、応答パルスS21及びスキッタS22を送信し、またスキッタS2Sとその反射信号S3との相関結果を位置特定装置10に出力する。
【0021】
位置特定装置10は、相関処理部26から出力された相関結果を入力すると、スキッタS22を送信した距離測定装置20aと、スキッタS22を反射した航空機30aとの距離を求め、このスキッタS22を反射した航空機30aの位置を特定する。ここで、単一の距離測定装置20aで求められた距離のみでは航空機30aの位置を特定することはできない。したがって、図1に示すように、位置特定装置10は、複数の距離測定装置20a〜20cと接続されており、複数の距離測定装置20a〜20cで得られた航空機30a,30bとの距離から、各航空機30a,30bの位置を特定することができる。
【0022】
位置特定装置10は、距離測定装置20a〜20cから距離の処理結果を入力する入力手段11と、距離測定装置20a〜20cと航空機30a,30bとの距離を利用して航空機30a,30bの位置を求める演算手段12と、求められた位置を出力する出力装置13とを備えている。また、位置特定装置10は、収拾データを記憶する収集データ記憶部D1、DMEデータを記憶するDMEデータ記憶部D2及び航空機データを記憶する航空機データ記憶部D3を備えている。
【0023】
入力手段11は、距離測定装置20a〜20cから距離の処理結果を入力すると、入力した処理結果から、距離測定装置20a〜20cと信号を反射した航空機との距離を求め、収集データ記憶部D1で記憶される収集データに求めた距離データを追加する。また、入力手段11は、収集データに含まれる距離データから不要なデータを削除し、収集データを定期的に更新する。
【0024】
収集データ記憶部D1に記憶される収集データは、距離測定装置20a〜20cの処理結果から得られた距離測定装置20a〜20cと航空機30a,30bとの距離のリストである。この収集データには、航空機30a,30bの位置の演算に有効な距離データのみを有していればよいため、追加後、所定期間が経過した距離データは、入力手段11によって削除される。すなわち、飛行中の航空機30a,30bは位置が変化するため、最新の距離データのみが有効なデータとなるためである。
【0025】
DMEデータ記憶部D2で記憶されるDMEデータは、位置特定装置10と接続される距離測定装置20a〜20cの位置に関するデータである。
【0026】
演算手段12は、収集データ記憶部D1から収集データを読みだすとともに、DMEデータ記憶部D2からDMEデータ読み出し、各距離測定装置20a〜20cの位置と、各距離測定装置20a〜20cから航空機30a,30bまでの距離を利用して、航空機30a,30bの位置を求める。また、演算手段12は、求めた航空機30a,30bの位置を航空機データ記憶部D3に記憶させる。
【0027】
例えば、図4に示すように、それぞれ距離測定装置20a〜20cから求められた処理結果の遅延時間がl1,l2,l3であり、これから求められた距離測定装置20aと航空機30aとの距離がL1、距離測定装置20bと航空機30aとの距離がL2、距離測定装置20cと航空機30aとの距離がL3であるとする。この場合、演算手段12は、距離測定装置20aから距離L1、距離測定装置20bから距離L2、かつ距離測定装置20cから距離L3の地点Xを求め、この地点Xを航空機30aの位置として特定する。
【0028】
航空機データ記憶部D3で記憶される航空機データは、演算手段12で特定された航空機30a,30bの位置を含むデータである。反射信号S3には航空機30a,30bの識別子は含まれていないが、例えば、航空機データに含まれる航空機30a,30bの位置をプロットすることで、航空機30a,30bの飛行の軌跡を把握することができる。
【0029】
出力装置13は、例えば、演算手段12の演算結果や、航空機データを出力するディスプレイやプリンタである。
【0030】
上述したように、実施形態に係る位置特定システム1では、地上の距離測定装置20a〜20cで自ら送信したスキッタS21の反射信号S3を受信し、送信したスキッタS21との相関を求める。また、位置特定装置10で、距離測定装置20a〜20cにおけるスキッタS22の送信と反射信号S3の受信の相関に応じて航空機30a,30bの位置を特定する。すなわち、位置特定システム1では、航空機30a,30bによる反射信号S3を利用して、航空機30a,30bの位置を特定することができる。
【0031】
上記のように、本発明を実施形態によって記載したが、この開示の一部をなす論述および図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施形態、実施例および運用技術が明らかとなる。また、本発明はここでは記載していない様々な実施形態等を含むことは勿論である。
【符号の説明】
【0032】
1…位置特定システム
10…位置特定装置
11…入力手段
12…演算手段
13…出力装置
D1…収集データ記憶部
D2…DMEデータ記憶部
D3…航空機データ記憶部
20a〜20c…距離測定装置
21…アンテナ
22…サーキュレータ
23…受信処理部
23b…ミキサ
23c…バンドパスフィルタ
23d…第1パルス検出手段
23e…第1パルスペア検出手段
23f…ローパスフィルタ
23g…第2パルス検出手段
23h…第2パルスペア検出手段
24…送信処理部
24a…スキッタ発生手段
24b…パルス生成手段
24c…ミキサ
24d…ハイパワーアンプ
25…発振器
26…相関処理部
30a,30b…航空機
【特許請求の範囲】
【請求項1】
それぞれ異なる場所に設置され、航空機からの質問に対して応答信号を送信する複数の距離測定装置と、複数の距離測定装置からの信号の受信結果を利用して航空機の位置を特定する位置特定装置とを有する位置特定システムであって、
各距離測定装置は、
信号を送信する送信手段と、
前記送信手段が送信した信号が航空機に反射した反射信号を受信し、前記送信手段からの信号の送信時刻と当該信号が反射した反射信号の受信時刻との相関を求める相関処理手段とを備え、
前記位置特定装置は、
前記複数の距離測定装置から相関結果を入力する入力手段と、
前記入力手段が入力した相関結果から求められる各距離測定装置と航空機との距離を利用して当該航空機の位置を特定する特定手段とを備える、
ことを特徴とする位置特定システム。
【請求項1】
それぞれ異なる場所に設置され、航空機からの質問に対して応答信号を送信する複数の距離測定装置と、複数の距離測定装置からの信号の受信結果を利用して航空機の位置を特定する位置特定装置とを有する位置特定システムであって、
各距離測定装置は、
信号を送信する送信手段と、
前記送信手段が送信した信号が航空機に反射した反射信号を受信し、前記送信手段からの信号の送信時刻と当該信号が反射した反射信号の受信時刻との相関を求める相関処理手段とを備え、
前記位置特定装置は、
前記複数の距離測定装置から相関結果を入力する入力手段と、
前記入力手段が入力した相関結果から求められる各距離測定装置と航空機との距離を利用して当該航空機の位置を特定する特定手段とを備える、
ことを特徴とする位置特定システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−88159(P2013−88159A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−226535(P2011−226535)
【出願日】平成23年10月14日(2011.10.14)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月14日(2011.10.14)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]