
位置特定装置、位置特定方法、及びプログラム
【課題】ビーコンによる搬送波の照射範囲による誤差を低減して自装置が存在する位置を特定する。
【解決手段】自装置の位置を推定する位置推定部と、ビーコンによる搬送波の照射範囲内の位置であるビーコン位置を取得するビーコン位置取得部と、ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値Rcを、前記ビーコン位置Pbの重みとして、前記位置推定部が推定した推定位置Pcと前記ビーコン位置との加重平均が示す位置を算出し、当該位置を自装置の位置Pとして特定する位置特定部とを備える。
【解決手段】自装置の位置を推定する位置推定部と、ビーコンによる搬送波の照射範囲内の位置であるビーコン位置を取得するビーコン位置取得部と、ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値Rcを、前記ビーコン位置Pbの重みとして、前記位置推定部が推定した推定位置Pcと前記ビーコン位置との加重平均が示す位置を算出し、当該位置を自装置の位置Pとして特定する位置特定部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自装置が存在する位置を特定する位置特定装置、位置特定方法、及びプログラムに関する。
【背景技術】
【0002】
近年、車両の位置に基づいて、当該車両に対して情報提供、警告、介入制御を行うサービスが注目されている。車両の位置は、カーナビゲーションシステムなどの位置特定装置が、GPS(Global Positioning System)や自律航法に基づいて特定する。また、車両位置の精度を高めるため、路側に設けられたビーコンから電波や光などの搬送波に乗った信号を受信し、通信が確立した位置をビーコンの位置に補正することで車両位置の補正を行う方法が用いられている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−026056号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながらビーコンは、位置特定装置と確実に通信を行うため、所定の範囲(例えば、進行方向に10メートル幅の範囲)に対して搬送波を照射する。そのため、位置特定装置がビーコンから信号を受信した位置に基づいて推定した位置情報には、搬送波の照射範囲の大きさに誤差が生じることとなる。
【0005】
本発明は、上記の問題に鑑みてなされたものであり、ビーコンによる搬送波の照射範囲による誤差を低減して自装置が存在する位置を特定する位置特定装置、位置特定方法、及びプログラムを提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明は上記の課題を解決するためになされたものであり、自装置の位置を推定する位置推定部と、信号を乗せた搬送波を射出するビーコンから受信した信号に基づいて、当該ビーコンによる搬送波の照射範囲内の位置であるビーコン位置を取得するビーコン位置取得部と、ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値を、前記ビーコン位置取得部が取得したビーコン位置の重みとして、前記位置推定部が推定した位置である推定位置と前記ビーコン位置との加重平均が示す位置を算出し、当該位置を自装置の位置として特定する位置特定部とを備えることを特徴とする。
【0007】
また、本発明においては、前記位置特定部は、前記位置推定部による位置推定の誤差範囲が狭いほど大きい値を示す重み値を、前記推定位置の重みとして、前記推定位置と前記ビーコン位置との加重平均が示す位置を算出することが好ましい。
【0008】
また、本発明においては、前記ビーコン位置は、所定の直交座標系における前記ビーコンによる搬送波の照射範囲内の位置を示す行列であり、前記推定位置は、前記直交座標系において自装置が存在すると推定される位置を示す行列であり、前記ビーコン位置の重みは、前記直交座標系においてビーコンからの信号を正常に受信できる位置の分散を示す分散共分散行列であることが好ましい。
【0009】
また、本発明においては、前記ビーコン位置の重みは、自装置が設置された高さが高いほど小さい値を示すことが好ましい。
【0010】
また、本発明においては、前記位置推定部が推定した推定位置に基づいて、自装置が存在する道路を特定する道路特定部と、前記道路特定部が特定した道路に対応するビーコン位置の重みを取得するビーコン重み取得部とを備え、前記位置特定部は、前記ビーコン重み取得部が取得した重みを用いて自装置の位置として特定することが好ましい。
【0011】
また、本発明においては、前記ビーコン位置取得部は、正常に信号の受信を完了したときに、当該信号の搬送波の強度と、前記ビーコン位置と搬送波の強度との関係とに基づいてビーコン位置を推定することが好ましい。
【0012】
また、本発明においては、前記ビーコンからの搬送波の強度を、当該搬送波を受信した位置に関連付けて搬送波強度記憶部に遂次記録する搬送波強度記録部を備え、前記ビーコン位置取得部は、前記搬送波強度記憶部が記憶する搬送波の強度の最大値に関連付けられた位置を、道路の延在方向におけるビーコン位置と推定することが好ましい。
【0013】
また、本発明においては、前記ビーコン位置取得部は、前記搬送波強度記憶部が記憶する搬送波の強度の最大値と、道路の延在方向に直交する方向におけるビーコン位置と搬送波の強度関係とに基づいて、道路の延在方向に直交する方向におけるビーコン位置を推定することが好ましい。
【0014】
また、本発明は、自装置が存在する位置を特定する位置特定装置を用いた位置特定方法であって、位置推定部は、自装置の位置を推定し、ビーコン位置取得部は、信号を乗せた搬送波を射出するビーコンから受信した信号に基づいて、当該ビーコンによる搬送波の照射範囲内の位置であるビーコン位置を取得し、位置特定部は、ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値を、前記ビーコン位置取得部が取得したビーコン位置の重みとして、前記位置推定部が推定した位置である推定位置と前記ビーコン位置との加重平均が示す位置を算出し、当該位置を自装置の位置として特定することを特徴とする。
【0015】
また、本発明は、自装置が存在する位置を特定する位置特定装置を、自装置の位置を推定する位置推定部、信号を乗せた搬送波を射出するビーコンから受信した信号に基づいて、当該ビーコンによる搬送波の照射範囲内の位置であるビーコン位置を取得するビーコン位置取得部、ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値を、前記ビーコン位置取得部が取得したビーコン位置の重みとして、前記位置推定部が推定した位置である推定位置と前記ビーコン位置との加重平均が示す位置を算出し、当該位置を自装置の位置として特定する位置特定部として機能させるためのプログラムである。
【発明の効果】
【0016】
本発明によれば、位置特定部は、推定位置とビーコン位置との加重平均が示す位置を自装置の位置として算出する。これにより、ビーコンによる搬送波の照射範囲による誤差を低減して自装置が存在する位置を特定することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の第1の実施形態による位置特定装置の構成を示す概略ブロック図である。
【図2】本発明の第1の実施形態による車両位置の特定方法を示す図である。
【図3】本発明の第1の実施形態による位置特定装置の動作を示すフローチャートである。
【図4】本発明の第2の実施形態によるビーコンが記憶するビーコン誤差の例を示す図である。
【図5】本発明の第2の実施形態による位置特定装置の構成を示す概略ブロック図である。
【図6】ビーコンが設置された交差点の状況の例を示す図である。
【図7】本発明の第3の実施形態によるビーコンが記憶するビーコン誤差の例を示す図である。
【図8】本発明の第3の実施形態による位置特定装置の構成を示す概略ブロック図である。
【図9】ビーコン位置が路側にある場合の走行位置と搬送波の強度との関係を示す図である。
【発明を実施するための形態】
【0018】
《第1の実施形態》
以下、図面を参照しながら本発明の第1の実施形態について詳しく説明する。
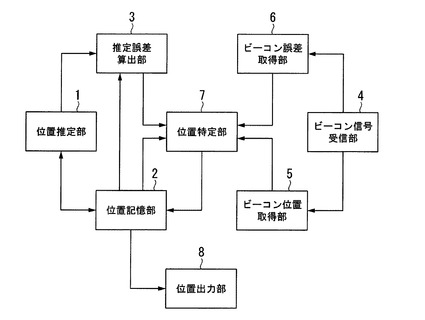
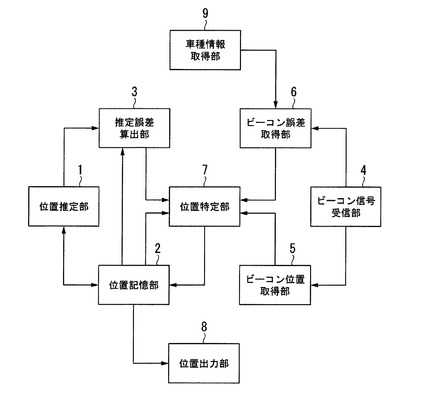
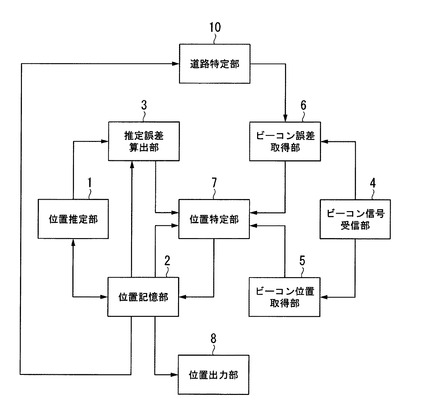
図1は、本発明の第1の実施形態による位置特定装置の構成を示す概略ブロック図である。
位置特定装置は、車両に搭載され、自装置が存在する位置を特定する装置であり、位置推定部1、位置記憶部2、推定誤差算出部3、ビーコン信号受信部4、ビーコン位置取得部5、ビーコン誤差取得部6、位置特定部7、位置出力部8を備える。
【0019】
位置推定部1は、GPS及び自律航法に基づいて自装置の位置を推定し、推定した位置を示す推定位置Pcを、推定した時刻に関連付けて位置記憶部2に記録する。なお、推定位置Pcは、式(1)に示す行列である。
【0020】
【数1】

【0021】
但し、xc、ycは、それぞれ推定位置の緯度及び経度を示す値である。
【0022】
位置記憶部2は、位置推定部1によって推定され、または位置特定部7によって特定された自装置の位置を示す位置情報を記憶する。
推定誤差算出部3は、位置記憶部2に蓄積された推定位置Pcの履歴、及び位置推定部1によるGPSの推定精度に基づいて、位置推定部1による推定位置Pcの緯線方向・経線方向における誤差を示す分散共分散行列である推定誤差Rcを算出する。なお、推定誤差Rcは、式(2)に示す行列である。
【0023】
【数2】
【0024】
但し、σc_xxは、推定位置の緯線方向の分散を示す値である。また、σc_yyは、推定位置の経線方向の分散を示す値である。σc_xyは、推定位置の緯線方向と経線方向の共分散を示す値である。つまり、推定誤差Rcの各要素は、位置推定部1による位置推定の誤差範囲が広いほど大きい値を示す。
【0025】
ビーコン信号受信部4は、路側に設けられたビーコンが出力する搬送波を捕捉し、当該搬送波から信号を抽出することで、信号を受信する。
ビーコン位置取得部5は、ビーコン信号受信部4が受信した信号から、ビーコンによる搬送波の照射範囲内の位置を示すビーコン位置Pbを読み出す。ここで、ビーコン位置Pbとしては、ビーコンが設置された位置や、照射範囲内において電波強度が最も強い位置などが設定される。なお、ビーコン位置Pbは、式(3)に示す行列である。
【0026】
【数3】
【0027】
但し、xb、ybは、それぞれビーコン位置の緯度及び経度を示す値である。
【0028】
ビーコン誤差取得部6は、ビーコン信号受信部4が受信した信号から、ビーコン位置Pbを中心とした搬送波の照射範囲を示す分散共分散行列であるビーコン誤差Rbを読み出す。なお、ビーコン誤差Rbは、式(4)に示す行列である。
【0029】
【数4】
【0030】
但し、σb_xxは、ビーコンが照射する信号が受信される位置の緯線方向の分散を示す値である。また、σb_yyは、ビーコンが照射する信号が受信される位置の経線方向の分散を示す値である。σb_xyは、ビーコンが照射する信号が受信される位置の緯線方向と経線方向の共分散を示す値である。つまり、ビーコン誤差Rbの各要素は、ビーコンによる搬送波の照射範囲が広いほど大きい値を示す。
【0031】
位置特定部7は、推定誤差算出部3が算出した推定誤差Rcを、ビーコン位置取得部5が取得したビーコン位置Pbの重みとし、ビーコン誤差取得部6が取得したビーコン誤差Rbを、位置記憶部2が記憶する推定位置Pcの重みとして、ビーコン位置Pbと推定位置Pcの加重平均を算出し、得られた位置Pを、自装置の位置と特定する。具体的には、位置特定部7は、式(5)を解くことで、自装置の位置Pを特定する。また、位置特定部7は、特定した位置Pを位置記憶部2が記憶する推定位置に上書きする。
【0032】
【数5】
【0033】
但し、X−1は、行列Xの逆行列を示す。
なお、本実施形態では、推定誤差算出部3が算出した推定誤差Rcを、ビーコン位置取得部5が取得したビーコン位置Pbの重みとし、ビーコン誤差取得部6が取得したビーコン誤差Rbを、位置記憶部2が記憶する推定位置Pcの重みとする。つまり、推定位置Pcの重みRbは、位置推定の誤差範囲が狭いほどビーコン位置Pbの重みRcに対して相対的に大きい値を示すこととなる。同様に、ビーコン位置Pbの重みRcは、ビーコンの通信範囲が狭いほど推定位置Pcの重みRbに対して相対的に大きい値を示すこととなる。
【0034】
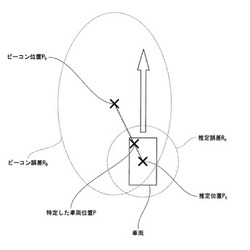
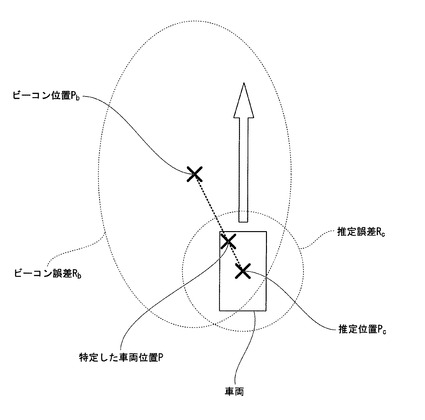
図2は、本発明の第1の実施形態による車両位置の特定方法を示す図である。
本実施形態では推定誤差Rc及びビーコン誤差Rbは、2×2の分散共分散行列によって示される。したがって、これらの誤差を緯線及び経線を軸とする二次元平面に投射すると、誤差は図2に示すように楕円形に広がりを有する。
【0035】
位置出力部8は、位置記憶部2が記憶する位置情報をディスプレイに出力する。
【0036】
なお、本実施形態においてビーコンは、ビーコン位置Pb及びビーコン誤差Rbを記憶する記憶部を備え、当該記憶部が記憶する情報を示す信号を搬送波に乗せて所定の照射範囲に出力する。なお、ビーコン誤差Rbは、ビーコンの設計時に予め決定しておく値であっても良いし、車両を通行させてビーコン誤差Rbを実測して求めた値であっても良い。
【0037】
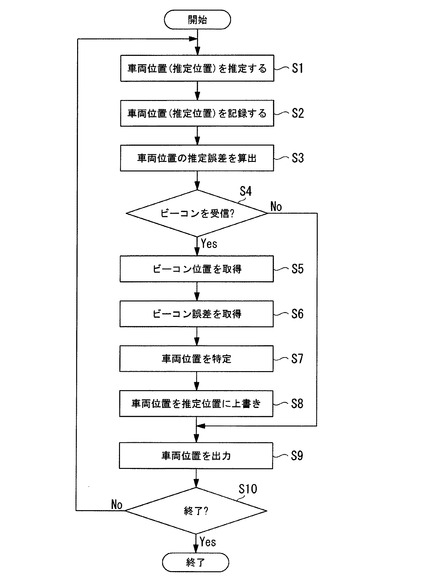
次に、本実施形態による位置特定装置の動作について説明する。
図3は、本発明の第1の実施形態による位置特定装置の動作を示すフローチャートである。
まず、位置特定装置が起動すると、位置推定部1は、GPSまたは自律航法にて自装置の位置すなわち自装置を搭載した車両の位置を推定する(ステップS1)。なお、位置推定部1は、位置記憶部2が記憶する過去の位置情報の履歴と、GPSまたは自律航法にて取得した位置とに基づいて現在の位置を推定するカルマンフィルタを備え、当該カルマンフィルタの出力値を、推定位置Pcとして出力する。次に、位置推定部1は、推定位置Pcを位置記憶部2に記録する(ステップS2)。
【0038】
また、位置推定部1は、推定位置の推定誤差Rcを算出する(ステップS3)。具体的には、位置推定部1がステップS1においてGPSによる位置推定を行った場合、位置推定に用いるGPS衛星の方向ベクトルに基づいてDOP(Dilution Of Precision)値を算出し、当該DOP値に基づいて推定誤差Rcを算出する。他方、位置推定部1がステップS1において自律航法による位置推定を行った場合、位置推定部1のカルマンフィルタにおいて学習された誤差を推定誤差Rcとする。
【0039】
次に、ビーコン信号受信部4は、ビーコンから信号を受信したか否かを判定する(ステップS4)。なお、ビーコン信号受信部4は、エラーなく信号の受信を完了したときに、ビーコンから信号を受信したと判定する。ビーコン信号受信部4が、ビーコンから信号を受信したと判定した場合(ステップS4:YES)、ビーコン位置取得部5は、ビーコン信号受信部4が受信した信号に含まれるビーコン位置Pbを示す情報を取得する(ステップS5)。また、ビーコン誤差取得部6は、ビーコン信号受信部4が受信した信号に含まれるビーコン誤差Rbを取得する(ステップS6)。
【0040】
次に、位置特定部7は、推定位置Pc、推定誤差Rc、ビーコン位置Pb、ビーコン誤差Rbを用いて上記式(5)を解くことで、車両位置Pを特定する(ステップS7)。式(5)によれば、これにより、誤差の大きさによって重みを動的に決定することができる。また、位置推定の誤差範囲が狭いほど(推定精度が高いほど)ビーコン位置Pbの重みRcが小さくなるため、特定される車両位置Pは、推定位置Pcに近い位置となる。同様に、ビーコンの通信範囲が狭いほど推定位置Pcの重みRbが小さくなるため、特定される車両位置Pは、ビーコン位置Pbに近い位置となる。
次に、位置特定部7は、特定した車両位置を、ステップS2で記録した推定位置に上書きして位置記憶部2に記録する(ステップS8)。
【0041】
ステップS8で車両位置を上書きした場合、またはビーコン信号受信部4がステップS4でビーコンから信号を受信していないと判定した場合(ステップS4:NO)、位置出力部8は、位置記憶部2に最後に記録された車両位置をディスプレイに出力する(ステップS9)。
次に、位置特定装置は、利用者による操作や割り込み処理などにより、外部から処理の終了要求を入力したか否かを判定する(ステップS10)。位置特定装置は、外部から終了要求を入力していないと判定した場合(ステップS10:NO)、ステップS1に戻り、車両位置の推定を行う。他方、位置特定装置は、外部から終了要求を入力したと判定した場合(ステップS10:YES)、処理を終了する。
【0042】
このように、本実施形態によれば、ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値Rcをビーコン位置Pbの重みとして、推定位置Pcとビーコン位置Pbとの加重平均が示す位置を算出し、当該位置を自装置の位置として特定する。これにより、ビーコンによる搬送波の照射範囲が狭い場合、すなわちビーコン位置Pbが信頼できる場合にビーコン位置Pbに近い位置を車両位置Pと特定し、ビーコンによる搬送波の照射範囲が広い場合、すなわちビーコン位置Pbが信頼できない場合にビーコン位置Pbより推定位置Pcに近い位置を車両位置Pと特定する。これにより、ビーコンによる搬送波の照射範囲による誤差を低減して自装置が存在する位置を特定することができる。
【0043】
また、本実施形態によれば、位置推定部1による位置推定の誤差範囲が狭いほど大きい値を示す重み値Rbを、推定位置Pcの重みとして、推定位置Pcとビーコン位置Pbとの加重平均が示す位置を算出する。これにより、位置推定の誤差が小さい場合、すなわち推定位置Pcが信頼できる場合に推定位置Pcに近い位置を車両位置Pと特定し、位置推定の誤差が大きい場合、すなわち推定位置Pcが信頼できない場合に推定位置Pcよりビーコン位置Pbに近い位置を車両位置と特定する。これにより、推定誤差の影響を加味して自装置が存在する位置を特定することができる。
【0044】
また、本実施形態によれば、推定誤差Rc、ビーコン誤差Rbは、それぞれ2×2の分散共分散行列によって表される。そして、当該行列を用いることで、緯度・経度で示される二次元の直交座標空間において、楕円形に広がる重みRc、Rbを用いて車両位置の特定を行うことができる。なお、図2に示すように緯線方向・経線方向に直交する軸を長軸・短軸とする場合に限られず、緯線方向及び経線方向に交差する方向に長軸・短軸とする場合も、分散共分散行列によって表現することができる。ビーコンによる搬送波の照射範囲の多くは、道路の延在方向に長軸を有する楕円形に近似することができる。他方、道路の延在方向は緯線方向または経線方向と一致するとは限らない。そのため、本実施形態のように重み値に行列を用いることで、ビーコンの搬送波の照射範囲の形状に合った重みを用いて車両位置の特定を行うことができる。
【0045】
《第2の実施形態》
次に、図面を参照しながら本発明の第2の実施形態について詳しく説明する。
第2の実施形態は、第1の実施形態におけるビーコンから送出される信号に、車種毎のビーコン誤差Rbが含まれる形態である。
【0046】
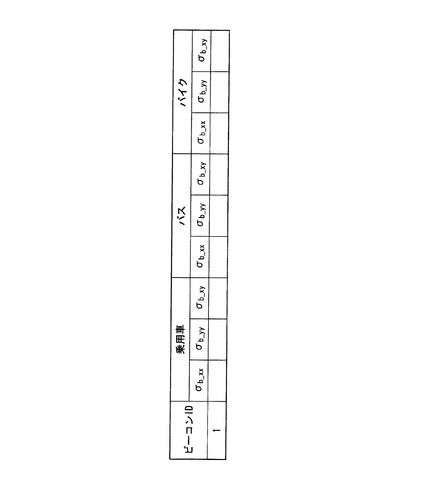
図4は、本発明の第2の実施形態によるビーコンが記憶するビーコン誤差の例を示す図である。
ビーコンは、ビーコン誤差Rbとして、乗用車のビーコン誤差Rbv、バスの乗用車のビーコン誤差Rbb、バイクのビーコン誤差Rbmを記憶しており、それぞれのビーコン誤差Rbを含む信号を搬送波に乗せて送出する。
なお、ビーコンが記憶する乗用車のビーコン誤差Rbvは、バスのビーコン誤差Rbbと比べて大きい値になる。これは、通常、乗用車における位置特定装置の設置高さがバスにおける位置が特定装置の設置高さより低い位置にあるため、バスに設置された位置特定装置のほうが乗用車に設置された位置特定装置よりアンテナに近く、搬送波の照射範囲が小さいためである。
このように、ビーコンが記憶するビーコン誤差Rbは、位置特定装置が設置された高さが高いほど小さい値を示す。
【0047】
図5は、本発明の第2の実施形態による位置特定装置の構成を示す概略ブロック図である。
第2の実施形態による位置特定装置は、第1の実施形態による位置特定装置にさらに車種情報取得部9を備え、ビーコン誤差取得部6の動作が異なるものである。
車種情報取得部9は、自装置が設置された車両の車種情報を車載器から取得する。
【0048】
ビーコン誤差取得部6は、ビーコン信号受信部4が受信した信号に含まれるビーコン誤差Rbのうち、車種情報取得部9が取得した車種情報に関連付けられたものを取得する。これにより、位置特定部7は、自装置が設置された高さに応じたビーコン誤差Rbを用いることで、より精度よく車両位置の特定をすることができる。
【0049】
《第3の実施形態》
次に、図面を参照しながら本発明の第3の実施形態について詳しく説明する。
第3の実施形態は、第1の実施形態におけるビーコンから送出される信号に、道路毎のビーコン誤差Rbが含まれる形態である。
【0050】
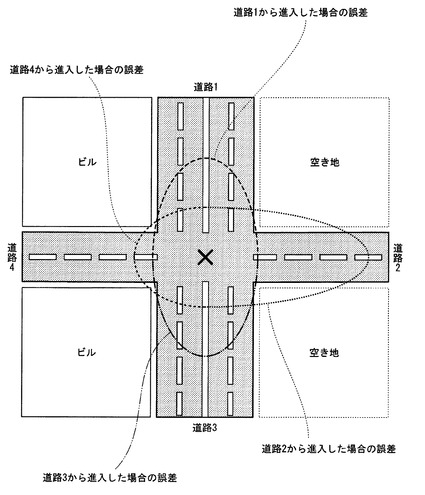
図6は、ビーコンが設置された交差点の状況の例を示す図である。
ビーコンの設置場所の周囲の環境によって、ビーコンの搬送波照射範囲が異なる場合がある。図6に示す例は、道路1の延在方向に道路3が設けられ、また道路2の延在方向に道路4が設けられ、道路1、3と道路2、4とが交差する交差点の例である。ここで、図6に示す交差点では、道路1、3の幅が道路2、4の幅より広く、また道路2の両隣には空き地が広がり、また道路4の両隣にはビルが建っている。また、ビーコンは、ビーコン位置が交差点の中央になるように設けられている。
【0051】
図6に示す例では、道路1、3は、道路2、4と比較して幅が広いため、道路1、3の道路幅方向の搬送波の照射範囲は、道路2、4の搬送波の照射範囲より広い。また、道路4の両隣はビルであるため、道路延在方向の搬送波の照射範囲は、両隣が空き地である道路2と比較して狭い。
このように、道路によって搬送波の広がりが異なるため、道路毎にビーコン誤差Rbを異ならせることが好ましい。
【0052】
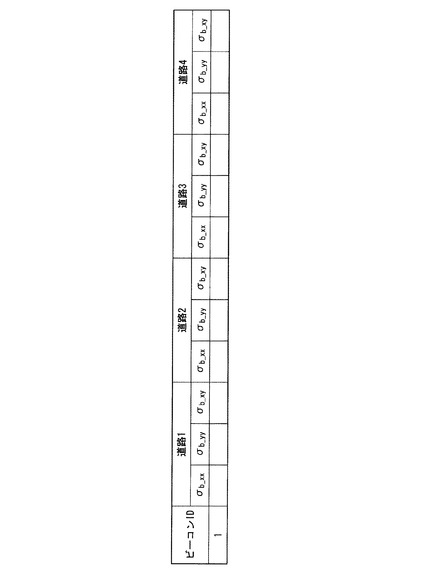
図7は、本発明の第3の実施形態によるビーコンが記憶するビーコン誤差の例を示す図である。
ビーコンは、ビーコン誤差Rbとして、道路毎のビーコン誤差(図6の例では、道路1のビーコン誤差Rb1、道路2のビーコン誤差Rb2、道路3のビーコン誤差Rb3、道路4のビーコン誤差Rb4)を記憶しており、それぞれのビーコン誤差Rbを含む信号を搬送波に乗せて送出する。
【0053】
図8は、本発明の第3の実施形態による位置特定装置の構成を示す概略ブロック図である。
第3の実施形態による位置特定装置は、第1の実施形態による位置特定装置にさらに道路特定部10を備え、ビーコン誤差取得部6の動作が異なるものである。
道路特定部10は、位置記憶部2が記憶する車両位置に基づいて、現在車両が存在する道路を特定する。
【0054】
ビーコン誤差取得部6は、ビーコン信号受信部4が受信した信号に含まれるビーコン誤差Rbのうち、道路特定部10が特定した道路に関連付けられたものを取得する。これにより、位置特定部7は、自装置が存在する道路に関連付けられたビーコン誤差Rbを用いることで、より精度よく車両位置の特定をすることができる。
【0055】
《第4の実施形態》
次に、本発明の第4の実施形態について詳しく説明する。
第4の実施形態は、第1の実施形態と異なる方法でビーコン位置Pbを特定する形態である。
第1の実施形態では、ビーコンから送出される信号にビーコン位置が含まれ、ビーコン位置取得部5が信号からビーコン位置を読み出すことで取得する場合を説明した。第4の実施形態では、ビーコンからの信号の受信時における搬送波の強度から、ビーコン位置を推定する形態について説明する。
【0056】
信号の受信位置がビーコン位置から遠いほど、信号受信時の搬送波の強度は弱い。したがって、信号の受信位置と搬送波の強度、及び受信位置と強度の関係が分かれば、位置特定装置はビーコン位置を推定することができる。
第4の実施形態によるビーコンは、ビーコン位置に代えて、電波強度と受信位置からビーコン位置までの距離との関係を示す情報を記憶しており、当該情報を含む信号を搬送波に乗せて送出する。
第4の実施形態による位置特定装置のビーコン位置取得部5は、ビーコン信号受信部4が信号を受信したときの搬送波の強度と、受信した信号に含まれる情報を読み出す。次に、ビーコン位置取得部5は、読み出した情報において、信号を受信したときの搬送波の強度に関連付けられたビーコン位置までの距離を読み出す。そして、位置記憶部2が記憶する現在の推定位置の、道路延在方向(または車両進行方向)に読み出した距離を加算することで、ビーコン位置を算出する。
【0057】
このように、本実施形態によれば、ビーコンからの信号受信時における搬送波の受信強度に基づいて、ビーコン位置を算出することができる。
【0058】
《第5の実施形態》
次に、本発明の第5の実施形態について詳しく説明する。
第5の実施形態は、第1の実施形態、第4の実施形態と異なる方法でビーコン位置Pbを特定する形態である。
第1の実施形態では、ビーコンから送出される信号にビーコン位置が含まれ、ビーコン位置取得部5が信号からビーコン位置を読み出すことで取得する場合を説明した。また、第4の実施形態では、ビーコンからの信号の受信時における搬送波の強度から、ビーコン位置を推定する場合について説明した。第5の実施形態では、ビーコンからの搬送波の強度のピーク値に基づいてビーコン位置を推定する形態について説明する。
【0059】
位置特定装置とビーコン位置とが近いほど、受信する搬送波の強度は強い。したがって、位置特定装置がビーコン位置を通過する際、位置特定装置が受信した搬送波の強度がピークとなる点が、ビーコン位置であると推定することができる。
第5の実施形態による位置特定装置のビーコン位置取得部5は、位置特定装置の推定位置と、当該推定位置においてビーコン信号受信部4が検知する搬送波の強度とを関連付けて遂次記憶する。次に、ビーコン位置取得部5は、ビーコン信号受信部4が検知する搬送波の強度がピークを過ぎたとき、ピークとなる強度に関連付けられた推定位置をビーコン位置として読み出す。
【0060】
このように、本実施形態によれば、ビーコンからの信号受信時における搬送波の受信強度に基づいて、ビーコン位置を算出することができる。
【0061】
《第6の実施形態》
次に、本発明の第6の実施形態について詳しく説明する。
第5の実施形態では、ビーコン位置を搬送波のピーク強度に基づいて決定する方法を説明した。しかしこの方法は、道路延在方向におけるビーコン位置を特定することができるが、道路幅方向におけるビーコン位置を特定することができない。そこで、ビーコン位置が道路の中央でなく、路側になるようにビーコンが設置されている場合、第6の実施形態で説明する方法を用いてビーコン位置を特定することで、道路延在方向及び道路幅方向におけるビーコン位置を特定する。
【0062】
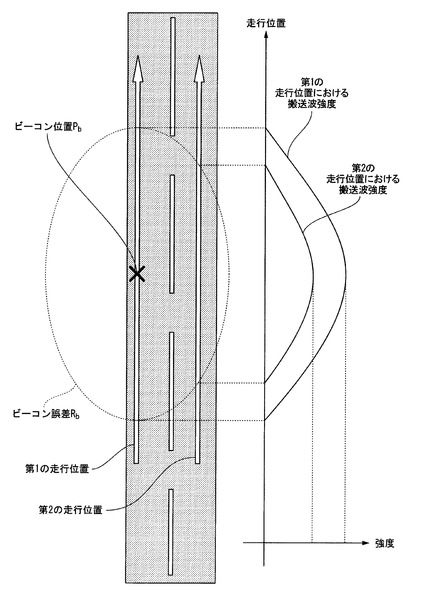
図9は、ビーコン位置が路側にある場合の走行位置と搬送波の強度との関係を示す図である。
信号の受信位置がビーコン位置から遠いほど、信号受信時の搬送波の強度は弱い。したがって、図9に示すように、搬送波の強度がピークになる点において、車両が道路幅方向においてビーコン位置に近い位置を走行している場合、ビーコン位置から遠い位置を走行している場合と比較して搬送波の受信強度が強くなる。つまり、搬送波のピーク強度及び道路幅方向のビーコン位置とピーク強度の関係が分かれば、位置特定装置はビーコン位置を推定することができる。
【0063】
第6の実施形態によるビーコンは、ビーコン位置に代えて、搬送波のピーク強度と道路幅方向のビーコン位置との関係を示す情報を記憶しており、当該情報を含む信号を搬送波に乗せて送出する。
第6の実施形態による位置特定装置のビーコン位置取得部5は、ビーコン信号受信部4が検出した搬送波のピーク強度と、受信した信号に含まれる情報を読み出す。次に、ビーコン位置取得部5は、読み出した情報において、搬送波のピーク強度に関連付けられた、道路幅方向のビーコン位置を読み出す。
これにより、本実施形態によれば、ビーコンからの信号受信時における搬送波の受信強度に基づいて、道路延在方向、及び道路幅方向におけるビーコン位置を算出することができる。
【0064】
以上、図面を参照してこの発明の一実施形態について詳しく説明してきたが、具体的な構成は上述のものに限られることはなく、この発明の要旨を逸脱しない範囲内において様々な設計変更等をすることが可能である。
例えば、上述した実施形態では、ビーコン位置Pb及びビーコン誤差Rbを示す信号をビーコンが出力する場合について説明したが、これに限られず、位置特定装置が各ビーコンの識別情報に関連付けて当該ビーコンのビーコン位置Pb及びビーコン誤差Rbを予め記憶しておくようにしても良い。
【0065】
また、上述した実施形態では、指定誤差算出部が算出した推定誤差Rcと、ビーコン誤差取得部6が取得したビーコン誤差Rbとを用いて車両位置の推定を行う場合を説明したが、これに限られず、推定誤差Rcを固定値としても良い。
【0066】
また、上述した実施形態では、推定誤差Rcをビーコン位置Pbの重みとして用い、ビーコン誤差Rbを推定位置Pcの重みとして用いる場合を説明したが、これに限られず、例えば、推定誤差Rcの逆数を推定位置Pcの重みとして用い、ビーコン誤差Rbの逆数をビーコン位置Pbの重みとして用いても良い。
【0067】
また、上述した実施形態では、重み値Rb、Rcとして行列を使う場合を説明したが、これに限られず重み値にスカラ値を用いても良い。
また、上述した実施形態では、重み値Rb、Rcとして分散共分散行列を用いる場合を説明したが、これに限られず、例えばビーコン位置の標準偏差や範囲などの他の散布度を用いても良いし、受信位置からビーコン位置までの距離の平均値や中央値などの代表値を用いても良い。
【0068】
上述の位置特定装置は内部に、コンピュータシステムを有している。そして、上述した各処理部の動作は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
【0069】
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【符号の説明】
【0070】
1…位置推定部 2…位置記憶部 3…推定誤差算出部 4…ビーコン信号受信部 5…ビーコン位置取得部 6…ビーコン誤差取得部 7…位置特定部 8…位置出力部 9…車種情報取得部 10…道路特定部
【技術分野】
【0001】
本発明は、自装置が存在する位置を特定する位置特定装置、位置特定方法、及びプログラムに関する。
【背景技術】
【0002】
近年、車両の位置に基づいて、当該車両に対して情報提供、警告、介入制御を行うサービスが注目されている。車両の位置は、カーナビゲーションシステムなどの位置特定装置が、GPS(Global Positioning System)や自律航法に基づいて特定する。また、車両位置の精度を高めるため、路側に設けられたビーコンから電波や光などの搬送波に乗った信号を受信し、通信が確立した位置をビーコンの位置に補正することで車両位置の補正を行う方法が用いられている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−026056号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながらビーコンは、位置特定装置と確実に通信を行うため、所定の範囲(例えば、進行方向に10メートル幅の範囲)に対して搬送波を照射する。そのため、位置特定装置がビーコンから信号を受信した位置に基づいて推定した位置情報には、搬送波の照射範囲の大きさに誤差が生じることとなる。
【0005】
本発明は、上記の問題に鑑みてなされたものであり、ビーコンによる搬送波の照射範囲による誤差を低減して自装置が存在する位置を特定する位置特定装置、位置特定方法、及びプログラムを提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明は上記の課題を解決するためになされたものであり、自装置の位置を推定する位置推定部と、信号を乗せた搬送波を射出するビーコンから受信した信号に基づいて、当該ビーコンによる搬送波の照射範囲内の位置であるビーコン位置を取得するビーコン位置取得部と、ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値を、前記ビーコン位置取得部が取得したビーコン位置の重みとして、前記位置推定部が推定した位置である推定位置と前記ビーコン位置との加重平均が示す位置を算出し、当該位置を自装置の位置として特定する位置特定部とを備えることを特徴とする。
【0007】
また、本発明においては、前記位置特定部は、前記位置推定部による位置推定の誤差範囲が狭いほど大きい値を示す重み値を、前記推定位置の重みとして、前記推定位置と前記ビーコン位置との加重平均が示す位置を算出することが好ましい。
【0008】
また、本発明においては、前記ビーコン位置は、所定の直交座標系における前記ビーコンによる搬送波の照射範囲内の位置を示す行列であり、前記推定位置は、前記直交座標系において自装置が存在すると推定される位置を示す行列であり、前記ビーコン位置の重みは、前記直交座標系においてビーコンからの信号を正常に受信できる位置の分散を示す分散共分散行列であることが好ましい。
【0009】
また、本発明においては、前記ビーコン位置の重みは、自装置が設置された高さが高いほど小さい値を示すことが好ましい。
【0010】
また、本発明においては、前記位置推定部が推定した推定位置に基づいて、自装置が存在する道路を特定する道路特定部と、前記道路特定部が特定した道路に対応するビーコン位置の重みを取得するビーコン重み取得部とを備え、前記位置特定部は、前記ビーコン重み取得部が取得した重みを用いて自装置の位置として特定することが好ましい。
【0011】
また、本発明においては、前記ビーコン位置取得部は、正常に信号の受信を完了したときに、当該信号の搬送波の強度と、前記ビーコン位置と搬送波の強度との関係とに基づいてビーコン位置を推定することが好ましい。
【0012】
また、本発明においては、前記ビーコンからの搬送波の強度を、当該搬送波を受信した位置に関連付けて搬送波強度記憶部に遂次記録する搬送波強度記録部を備え、前記ビーコン位置取得部は、前記搬送波強度記憶部が記憶する搬送波の強度の最大値に関連付けられた位置を、道路の延在方向におけるビーコン位置と推定することが好ましい。
【0013】
また、本発明においては、前記ビーコン位置取得部は、前記搬送波強度記憶部が記憶する搬送波の強度の最大値と、道路の延在方向に直交する方向におけるビーコン位置と搬送波の強度関係とに基づいて、道路の延在方向に直交する方向におけるビーコン位置を推定することが好ましい。
【0014】
また、本発明は、自装置が存在する位置を特定する位置特定装置を用いた位置特定方法であって、位置推定部は、自装置の位置を推定し、ビーコン位置取得部は、信号を乗せた搬送波を射出するビーコンから受信した信号に基づいて、当該ビーコンによる搬送波の照射範囲内の位置であるビーコン位置を取得し、位置特定部は、ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値を、前記ビーコン位置取得部が取得したビーコン位置の重みとして、前記位置推定部が推定した位置である推定位置と前記ビーコン位置との加重平均が示す位置を算出し、当該位置を自装置の位置として特定することを特徴とする。
【0015】
また、本発明は、自装置が存在する位置を特定する位置特定装置を、自装置の位置を推定する位置推定部、信号を乗せた搬送波を射出するビーコンから受信した信号に基づいて、当該ビーコンによる搬送波の照射範囲内の位置であるビーコン位置を取得するビーコン位置取得部、ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値を、前記ビーコン位置取得部が取得したビーコン位置の重みとして、前記位置推定部が推定した位置である推定位置と前記ビーコン位置との加重平均が示す位置を算出し、当該位置を自装置の位置として特定する位置特定部として機能させるためのプログラムである。
【発明の効果】
【0016】
本発明によれば、位置特定部は、推定位置とビーコン位置との加重平均が示す位置を自装置の位置として算出する。これにより、ビーコンによる搬送波の照射範囲による誤差を低減して自装置が存在する位置を特定することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の第1の実施形態による位置特定装置の構成を示す概略ブロック図である。
【図2】本発明の第1の実施形態による車両位置の特定方法を示す図である。
【図3】本発明の第1の実施形態による位置特定装置の動作を示すフローチャートである。
【図4】本発明の第2の実施形態によるビーコンが記憶するビーコン誤差の例を示す図である。
【図5】本発明の第2の実施形態による位置特定装置の構成を示す概略ブロック図である。
【図6】ビーコンが設置された交差点の状況の例を示す図である。
【図7】本発明の第3の実施形態によるビーコンが記憶するビーコン誤差の例を示す図である。
【図8】本発明の第3の実施形態による位置特定装置の構成を示す概略ブロック図である。
【図9】ビーコン位置が路側にある場合の走行位置と搬送波の強度との関係を示す図である。
【発明を実施するための形態】
【0018】
《第1の実施形態》
以下、図面を参照しながら本発明の第1の実施形態について詳しく説明する。
図1は、本発明の第1の実施形態による位置特定装置の構成を示す概略ブロック図である。
位置特定装置は、車両に搭載され、自装置が存在する位置を特定する装置であり、位置推定部1、位置記憶部2、推定誤差算出部3、ビーコン信号受信部4、ビーコン位置取得部5、ビーコン誤差取得部6、位置特定部7、位置出力部8を備える。
【0019】
位置推定部1は、GPS及び自律航法に基づいて自装置の位置を推定し、推定した位置を示す推定位置Pcを、推定した時刻に関連付けて位置記憶部2に記録する。なお、推定位置Pcは、式(1)に示す行列である。
【0020】
【数1】
【0021】
但し、xc、ycは、それぞれ推定位置の緯度及び経度を示す値である。
【0022】
位置記憶部2は、位置推定部1によって推定され、または位置特定部7によって特定された自装置の位置を示す位置情報を記憶する。
推定誤差算出部3は、位置記憶部2に蓄積された推定位置Pcの履歴、及び位置推定部1によるGPSの推定精度に基づいて、位置推定部1による推定位置Pcの緯線方向・経線方向における誤差を示す分散共分散行列である推定誤差Rcを算出する。なお、推定誤差Rcは、式(2)に示す行列である。
【0023】
【数2】
【0024】
但し、σc_xxは、推定位置の緯線方向の分散を示す値である。また、σc_yyは、推定位置の経線方向の分散を示す値である。σc_xyは、推定位置の緯線方向と経線方向の共分散を示す値である。つまり、推定誤差Rcの各要素は、位置推定部1による位置推定の誤差範囲が広いほど大きい値を示す。
【0025】
ビーコン信号受信部4は、路側に設けられたビーコンが出力する搬送波を捕捉し、当該搬送波から信号を抽出することで、信号を受信する。
ビーコン位置取得部5は、ビーコン信号受信部4が受信した信号から、ビーコンによる搬送波の照射範囲内の位置を示すビーコン位置Pbを読み出す。ここで、ビーコン位置Pbとしては、ビーコンが設置された位置や、照射範囲内において電波強度が最も強い位置などが設定される。なお、ビーコン位置Pbは、式(3)に示す行列である。
【0026】
【数3】
【0027】
但し、xb、ybは、それぞれビーコン位置の緯度及び経度を示す値である。
【0028】
ビーコン誤差取得部6は、ビーコン信号受信部4が受信した信号から、ビーコン位置Pbを中心とした搬送波の照射範囲を示す分散共分散行列であるビーコン誤差Rbを読み出す。なお、ビーコン誤差Rbは、式(4)に示す行列である。
【0029】
【数4】
【0030】
但し、σb_xxは、ビーコンが照射する信号が受信される位置の緯線方向の分散を示す値である。また、σb_yyは、ビーコンが照射する信号が受信される位置の経線方向の分散を示す値である。σb_xyは、ビーコンが照射する信号が受信される位置の緯線方向と経線方向の共分散を示す値である。つまり、ビーコン誤差Rbの各要素は、ビーコンによる搬送波の照射範囲が広いほど大きい値を示す。
【0031】
位置特定部7は、推定誤差算出部3が算出した推定誤差Rcを、ビーコン位置取得部5が取得したビーコン位置Pbの重みとし、ビーコン誤差取得部6が取得したビーコン誤差Rbを、位置記憶部2が記憶する推定位置Pcの重みとして、ビーコン位置Pbと推定位置Pcの加重平均を算出し、得られた位置Pを、自装置の位置と特定する。具体的には、位置特定部7は、式(5)を解くことで、自装置の位置Pを特定する。また、位置特定部7は、特定した位置Pを位置記憶部2が記憶する推定位置に上書きする。
【0032】
【数5】
【0033】
但し、X−1は、行列Xの逆行列を示す。
なお、本実施形態では、推定誤差算出部3が算出した推定誤差Rcを、ビーコン位置取得部5が取得したビーコン位置Pbの重みとし、ビーコン誤差取得部6が取得したビーコン誤差Rbを、位置記憶部2が記憶する推定位置Pcの重みとする。つまり、推定位置Pcの重みRbは、位置推定の誤差範囲が狭いほどビーコン位置Pbの重みRcに対して相対的に大きい値を示すこととなる。同様に、ビーコン位置Pbの重みRcは、ビーコンの通信範囲が狭いほど推定位置Pcの重みRbに対して相対的に大きい値を示すこととなる。
【0034】
図2は、本発明の第1の実施形態による車両位置の特定方法を示す図である。
本実施形態では推定誤差Rc及びビーコン誤差Rbは、2×2の分散共分散行列によって示される。したがって、これらの誤差を緯線及び経線を軸とする二次元平面に投射すると、誤差は図2に示すように楕円形に広がりを有する。
【0035】
位置出力部8は、位置記憶部2が記憶する位置情報をディスプレイに出力する。
【0036】
なお、本実施形態においてビーコンは、ビーコン位置Pb及びビーコン誤差Rbを記憶する記憶部を備え、当該記憶部が記憶する情報を示す信号を搬送波に乗せて所定の照射範囲に出力する。なお、ビーコン誤差Rbは、ビーコンの設計時に予め決定しておく値であっても良いし、車両を通行させてビーコン誤差Rbを実測して求めた値であっても良い。
【0037】
次に、本実施形態による位置特定装置の動作について説明する。
図3は、本発明の第1の実施形態による位置特定装置の動作を示すフローチャートである。
まず、位置特定装置が起動すると、位置推定部1は、GPSまたは自律航法にて自装置の位置すなわち自装置を搭載した車両の位置を推定する(ステップS1)。なお、位置推定部1は、位置記憶部2が記憶する過去の位置情報の履歴と、GPSまたは自律航法にて取得した位置とに基づいて現在の位置を推定するカルマンフィルタを備え、当該カルマンフィルタの出力値を、推定位置Pcとして出力する。次に、位置推定部1は、推定位置Pcを位置記憶部2に記録する(ステップS2)。
【0038】
また、位置推定部1は、推定位置の推定誤差Rcを算出する(ステップS3)。具体的には、位置推定部1がステップS1においてGPSによる位置推定を行った場合、位置推定に用いるGPS衛星の方向ベクトルに基づいてDOP(Dilution Of Precision)値を算出し、当該DOP値に基づいて推定誤差Rcを算出する。他方、位置推定部1がステップS1において自律航法による位置推定を行った場合、位置推定部1のカルマンフィルタにおいて学習された誤差を推定誤差Rcとする。
【0039】
次に、ビーコン信号受信部4は、ビーコンから信号を受信したか否かを判定する(ステップS4)。なお、ビーコン信号受信部4は、エラーなく信号の受信を完了したときに、ビーコンから信号を受信したと判定する。ビーコン信号受信部4が、ビーコンから信号を受信したと判定した場合(ステップS4:YES)、ビーコン位置取得部5は、ビーコン信号受信部4が受信した信号に含まれるビーコン位置Pbを示す情報を取得する(ステップS5)。また、ビーコン誤差取得部6は、ビーコン信号受信部4が受信した信号に含まれるビーコン誤差Rbを取得する(ステップS6)。
【0040】
次に、位置特定部7は、推定位置Pc、推定誤差Rc、ビーコン位置Pb、ビーコン誤差Rbを用いて上記式(5)を解くことで、車両位置Pを特定する(ステップS7)。式(5)によれば、これにより、誤差の大きさによって重みを動的に決定することができる。また、位置推定の誤差範囲が狭いほど(推定精度が高いほど)ビーコン位置Pbの重みRcが小さくなるため、特定される車両位置Pは、推定位置Pcに近い位置となる。同様に、ビーコンの通信範囲が狭いほど推定位置Pcの重みRbが小さくなるため、特定される車両位置Pは、ビーコン位置Pbに近い位置となる。
次に、位置特定部7は、特定した車両位置を、ステップS2で記録した推定位置に上書きして位置記憶部2に記録する(ステップS8)。
【0041】
ステップS8で車両位置を上書きした場合、またはビーコン信号受信部4がステップS4でビーコンから信号を受信していないと判定した場合(ステップS4:NO)、位置出力部8は、位置記憶部2に最後に記録された車両位置をディスプレイに出力する(ステップS9)。
次に、位置特定装置は、利用者による操作や割り込み処理などにより、外部から処理の終了要求を入力したか否かを判定する(ステップS10)。位置特定装置は、外部から終了要求を入力していないと判定した場合(ステップS10:NO)、ステップS1に戻り、車両位置の推定を行う。他方、位置特定装置は、外部から終了要求を入力したと判定した場合(ステップS10:YES)、処理を終了する。
【0042】
このように、本実施形態によれば、ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値Rcをビーコン位置Pbの重みとして、推定位置Pcとビーコン位置Pbとの加重平均が示す位置を算出し、当該位置を自装置の位置として特定する。これにより、ビーコンによる搬送波の照射範囲が狭い場合、すなわちビーコン位置Pbが信頼できる場合にビーコン位置Pbに近い位置を車両位置Pと特定し、ビーコンによる搬送波の照射範囲が広い場合、すなわちビーコン位置Pbが信頼できない場合にビーコン位置Pbより推定位置Pcに近い位置を車両位置Pと特定する。これにより、ビーコンによる搬送波の照射範囲による誤差を低減して自装置が存在する位置を特定することができる。
【0043】
また、本実施形態によれば、位置推定部1による位置推定の誤差範囲が狭いほど大きい値を示す重み値Rbを、推定位置Pcの重みとして、推定位置Pcとビーコン位置Pbとの加重平均が示す位置を算出する。これにより、位置推定の誤差が小さい場合、すなわち推定位置Pcが信頼できる場合に推定位置Pcに近い位置を車両位置Pと特定し、位置推定の誤差が大きい場合、すなわち推定位置Pcが信頼できない場合に推定位置Pcよりビーコン位置Pbに近い位置を車両位置と特定する。これにより、推定誤差の影響を加味して自装置が存在する位置を特定することができる。
【0044】
また、本実施形態によれば、推定誤差Rc、ビーコン誤差Rbは、それぞれ2×2の分散共分散行列によって表される。そして、当該行列を用いることで、緯度・経度で示される二次元の直交座標空間において、楕円形に広がる重みRc、Rbを用いて車両位置の特定を行うことができる。なお、図2に示すように緯線方向・経線方向に直交する軸を長軸・短軸とする場合に限られず、緯線方向及び経線方向に交差する方向に長軸・短軸とする場合も、分散共分散行列によって表現することができる。ビーコンによる搬送波の照射範囲の多くは、道路の延在方向に長軸を有する楕円形に近似することができる。他方、道路の延在方向は緯線方向または経線方向と一致するとは限らない。そのため、本実施形態のように重み値に行列を用いることで、ビーコンの搬送波の照射範囲の形状に合った重みを用いて車両位置の特定を行うことができる。
【0045】
《第2の実施形態》
次に、図面を参照しながら本発明の第2の実施形態について詳しく説明する。
第2の実施形態は、第1の実施形態におけるビーコンから送出される信号に、車種毎のビーコン誤差Rbが含まれる形態である。
【0046】
図4は、本発明の第2の実施形態によるビーコンが記憶するビーコン誤差の例を示す図である。
ビーコンは、ビーコン誤差Rbとして、乗用車のビーコン誤差Rbv、バスの乗用車のビーコン誤差Rbb、バイクのビーコン誤差Rbmを記憶しており、それぞれのビーコン誤差Rbを含む信号を搬送波に乗せて送出する。
なお、ビーコンが記憶する乗用車のビーコン誤差Rbvは、バスのビーコン誤差Rbbと比べて大きい値になる。これは、通常、乗用車における位置特定装置の設置高さがバスにおける位置が特定装置の設置高さより低い位置にあるため、バスに設置された位置特定装置のほうが乗用車に設置された位置特定装置よりアンテナに近く、搬送波の照射範囲が小さいためである。
このように、ビーコンが記憶するビーコン誤差Rbは、位置特定装置が設置された高さが高いほど小さい値を示す。
【0047】
図5は、本発明の第2の実施形態による位置特定装置の構成を示す概略ブロック図である。
第2の実施形態による位置特定装置は、第1の実施形態による位置特定装置にさらに車種情報取得部9を備え、ビーコン誤差取得部6の動作が異なるものである。
車種情報取得部9は、自装置が設置された車両の車種情報を車載器から取得する。
【0048】
ビーコン誤差取得部6は、ビーコン信号受信部4が受信した信号に含まれるビーコン誤差Rbのうち、車種情報取得部9が取得した車種情報に関連付けられたものを取得する。これにより、位置特定部7は、自装置が設置された高さに応じたビーコン誤差Rbを用いることで、より精度よく車両位置の特定をすることができる。
【0049】
《第3の実施形態》
次に、図面を参照しながら本発明の第3の実施形態について詳しく説明する。
第3の実施形態は、第1の実施形態におけるビーコンから送出される信号に、道路毎のビーコン誤差Rbが含まれる形態である。
【0050】
図6は、ビーコンが設置された交差点の状況の例を示す図である。
ビーコンの設置場所の周囲の環境によって、ビーコンの搬送波照射範囲が異なる場合がある。図6に示す例は、道路1の延在方向に道路3が設けられ、また道路2の延在方向に道路4が設けられ、道路1、3と道路2、4とが交差する交差点の例である。ここで、図6に示す交差点では、道路1、3の幅が道路2、4の幅より広く、また道路2の両隣には空き地が広がり、また道路4の両隣にはビルが建っている。また、ビーコンは、ビーコン位置が交差点の中央になるように設けられている。
【0051】
図6に示す例では、道路1、3は、道路2、4と比較して幅が広いため、道路1、3の道路幅方向の搬送波の照射範囲は、道路2、4の搬送波の照射範囲より広い。また、道路4の両隣はビルであるため、道路延在方向の搬送波の照射範囲は、両隣が空き地である道路2と比較して狭い。
このように、道路によって搬送波の広がりが異なるため、道路毎にビーコン誤差Rbを異ならせることが好ましい。
【0052】
図7は、本発明の第3の実施形態によるビーコンが記憶するビーコン誤差の例を示す図である。
ビーコンは、ビーコン誤差Rbとして、道路毎のビーコン誤差(図6の例では、道路1のビーコン誤差Rb1、道路2のビーコン誤差Rb2、道路3のビーコン誤差Rb3、道路4のビーコン誤差Rb4)を記憶しており、それぞれのビーコン誤差Rbを含む信号を搬送波に乗せて送出する。
【0053】
図8は、本発明の第3の実施形態による位置特定装置の構成を示す概略ブロック図である。
第3の実施形態による位置特定装置は、第1の実施形態による位置特定装置にさらに道路特定部10を備え、ビーコン誤差取得部6の動作が異なるものである。
道路特定部10は、位置記憶部2が記憶する車両位置に基づいて、現在車両が存在する道路を特定する。
【0054】
ビーコン誤差取得部6は、ビーコン信号受信部4が受信した信号に含まれるビーコン誤差Rbのうち、道路特定部10が特定した道路に関連付けられたものを取得する。これにより、位置特定部7は、自装置が存在する道路に関連付けられたビーコン誤差Rbを用いることで、より精度よく車両位置の特定をすることができる。
【0055】
《第4の実施形態》
次に、本発明の第4の実施形態について詳しく説明する。
第4の実施形態は、第1の実施形態と異なる方法でビーコン位置Pbを特定する形態である。
第1の実施形態では、ビーコンから送出される信号にビーコン位置が含まれ、ビーコン位置取得部5が信号からビーコン位置を読み出すことで取得する場合を説明した。第4の実施形態では、ビーコンからの信号の受信時における搬送波の強度から、ビーコン位置を推定する形態について説明する。
【0056】
信号の受信位置がビーコン位置から遠いほど、信号受信時の搬送波の強度は弱い。したがって、信号の受信位置と搬送波の強度、及び受信位置と強度の関係が分かれば、位置特定装置はビーコン位置を推定することができる。
第4の実施形態によるビーコンは、ビーコン位置に代えて、電波強度と受信位置からビーコン位置までの距離との関係を示す情報を記憶しており、当該情報を含む信号を搬送波に乗せて送出する。
第4の実施形態による位置特定装置のビーコン位置取得部5は、ビーコン信号受信部4が信号を受信したときの搬送波の強度と、受信した信号に含まれる情報を読み出す。次に、ビーコン位置取得部5は、読み出した情報において、信号を受信したときの搬送波の強度に関連付けられたビーコン位置までの距離を読み出す。そして、位置記憶部2が記憶する現在の推定位置の、道路延在方向(または車両進行方向)に読み出した距離を加算することで、ビーコン位置を算出する。
【0057】
このように、本実施形態によれば、ビーコンからの信号受信時における搬送波の受信強度に基づいて、ビーコン位置を算出することができる。
【0058】
《第5の実施形態》
次に、本発明の第5の実施形態について詳しく説明する。
第5の実施形態は、第1の実施形態、第4の実施形態と異なる方法でビーコン位置Pbを特定する形態である。
第1の実施形態では、ビーコンから送出される信号にビーコン位置が含まれ、ビーコン位置取得部5が信号からビーコン位置を読み出すことで取得する場合を説明した。また、第4の実施形態では、ビーコンからの信号の受信時における搬送波の強度から、ビーコン位置を推定する場合について説明した。第5の実施形態では、ビーコンからの搬送波の強度のピーク値に基づいてビーコン位置を推定する形態について説明する。
【0059】
位置特定装置とビーコン位置とが近いほど、受信する搬送波の強度は強い。したがって、位置特定装置がビーコン位置を通過する際、位置特定装置が受信した搬送波の強度がピークとなる点が、ビーコン位置であると推定することができる。
第5の実施形態による位置特定装置のビーコン位置取得部5は、位置特定装置の推定位置と、当該推定位置においてビーコン信号受信部4が検知する搬送波の強度とを関連付けて遂次記憶する。次に、ビーコン位置取得部5は、ビーコン信号受信部4が検知する搬送波の強度がピークを過ぎたとき、ピークとなる強度に関連付けられた推定位置をビーコン位置として読み出す。
【0060】
このように、本実施形態によれば、ビーコンからの信号受信時における搬送波の受信強度に基づいて、ビーコン位置を算出することができる。
【0061】
《第6の実施形態》
次に、本発明の第6の実施形態について詳しく説明する。
第5の実施形態では、ビーコン位置を搬送波のピーク強度に基づいて決定する方法を説明した。しかしこの方法は、道路延在方向におけるビーコン位置を特定することができるが、道路幅方向におけるビーコン位置を特定することができない。そこで、ビーコン位置が道路の中央でなく、路側になるようにビーコンが設置されている場合、第6の実施形態で説明する方法を用いてビーコン位置を特定することで、道路延在方向及び道路幅方向におけるビーコン位置を特定する。
【0062】
図9は、ビーコン位置が路側にある場合の走行位置と搬送波の強度との関係を示す図である。
信号の受信位置がビーコン位置から遠いほど、信号受信時の搬送波の強度は弱い。したがって、図9に示すように、搬送波の強度がピークになる点において、車両が道路幅方向においてビーコン位置に近い位置を走行している場合、ビーコン位置から遠い位置を走行している場合と比較して搬送波の受信強度が強くなる。つまり、搬送波のピーク強度及び道路幅方向のビーコン位置とピーク強度の関係が分かれば、位置特定装置はビーコン位置を推定することができる。
【0063】
第6の実施形態によるビーコンは、ビーコン位置に代えて、搬送波のピーク強度と道路幅方向のビーコン位置との関係を示す情報を記憶しており、当該情報を含む信号を搬送波に乗せて送出する。
第6の実施形態による位置特定装置のビーコン位置取得部5は、ビーコン信号受信部4が検出した搬送波のピーク強度と、受信した信号に含まれる情報を読み出す。次に、ビーコン位置取得部5は、読み出した情報において、搬送波のピーク強度に関連付けられた、道路幅方向のビーコン位置を読み出す。
これにより、本実施形態によれば、ビーコンからの信号受信時における搬送波の受信強度に基づいて、道路延在方向、及び道路幅方向におけるビーコン位置を算出することができる。
【0064】
以上、図面を参照してこの発明の一実施形態について詳しく説明してきたが、具体的な構成は上述のものに限られることはなく、この発明の要旨を逸脱しない範囲内において様々な設計変更等をすることが可能である。
例えば、上述した実施形態では、ビーコン位置Pb及びビーコン誤差Rbを示す信号をビーコンが出力する場合について説明したが、これに限られず、位置特定装置が各ビーコンの識別情報に関連付けて当該ビーコンのビーコン位置Pb及びビーコン誤差Rbを予め記憶しておくようにしても良い。
【0065】
また、上述した実施形態では、指定誤差算出部が算出した推定誤差Rcと、ビーコン誤差取得部6が取得したビーコン誤差Rbとを用いて車両位置の推定を行う場合を説明したが、これに限られず、推定誤差Rcを固定値としても良い。
【0066】
また、上述した実施形態では、推定誤差Rcをビーコン位置Pbの重みとして用い、ビーコン誤差Rbを推定位置Pcの重みとして用いる場合を説明したが、これに限られず、例えば、推定誤差Rcの逆数を推定位置Pcの重みとして用い、ビーコン誤差Rbの逆数をビーコン位置Pbの重みとして用いても良い。
【0067】
また、上述した実施形態では、重み値Rb、Rcとして行列を使う場合を説明したが、これに限られず重み値にスカラ値を用いても良い。
また、上述した実施形態では、重み値Rb、Rcとして分散共分散行列を用いる場合を説明したが、これに限られず、例えばビーコン位置の標準偏差や範囲などの他の散布度を用いても良いし、受信位置からビーコン位置までの距離の平均値や中央値などの代表値を用いても良い。
【0068】
上述の位置特定装置は内部に、コンピュータシステムを有している。そして、上述した各処理部の動作は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
【0069】
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【符号の説明】
【0070】
1…位置推定部 2…位置記憶部 3…推定誤差算出部 4…ビーコン信号受信部 5…ビーコン位置取得部 6…ビーコン誤差取得部 7…位置特定部 8…位置出力部 9…車種情報取得部 10…道路特定部
【特許請求の範囲】
【請求項1】
自装置の位置を推定する位置推定部と、
信号を乗せた搬送波を射出するビーコンから受信した信号に基づいて、当該ビーコンによる搬送波の照射範囲内の位置であるビーコン位置を取得するビーコン位置取得部と、
ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値を、前記ビーコン位置取得部が取得したビーコン位置の重みとして、前記位置推定部が推定した位置である推定位置と前記ビーコン位置との加重平均が示す位置を算出し、当該位置を自装置の位置として特定する位置特定部と
を備えることを特徴とする位置特定装置。
【請求項2】
前記位置特定部は、前記位置推定部による位置推定の誤差範囲が狭いほど大きい値を示す重み値を、前記推定位置の重みとして、前記推定位置と前記ビーコン位置との加重平均が示す位置を算出する
ことを特徴とする請求項1に記載の位置特定装置。
【請求項3】
前記ビーコン位置は、所定の直交座標系における前記ビーコンによる搬送波の照射範囲内の位置を示す行列であり、
前記推定位置は、前記直交座標系において自装置が存在すると推定される位置を示す行列であり、
前記ビーコン位置の重みは、前記直交座標系においてビーコンからの信号を正常に受信できる位置の分散を示す分散共分散行列である
ことを特徴とする請求項1または請求項2に記載の位置特定装置。
【請求項4】
前記ビーコン位置の重みは、自装置が設置された高さが高いほど小さい値を示すことを特徴とする請求項2に記載の位置特定装置。
【請求項5】
前記位置推定部が推定した推定位置に基づいて、自装置が存在する道路を特定する道路特定部と、
前記道路特定部が特定した道路に対応するビーコン位置の重みを取得するビーコン重み取得部と
を備え、
前記位置特定部は、前記ビーコン重み取得部が取得した重みを用いて自装置の位置として特定する
ことを特徴とする請求項1から請求項4の何れか1項に記載の位置特定装置。
【請求項6】
前記ビーコン位置取得部は、正常に信号の受信を完了したときに、当該信号の搬送波の強度と、前記ビーコン位置と搬送波の強度との関係とに基づいてビーコン位置を推定する
ことを特徴とする請求項1から請求項5の何れか1項に記載の位置特定装置。
【請求項7】
前記ビーコンからの搬送波の強度を、当該搬送波を受信した位置に関連付けて搬送波強度記憶部に遂次記録する搬送波強度記録部を備え、
前記ビーコン位置取得部は、前記搬送波強度記憶部が記憶する搬送波の強度の最大値に関連付けられた位置を、道路の延在方向におけるビーコン位置と推定する
ことを特徴とする請求項1から請求項5の何れか1項に記載の位置特定装置。
【請求項8】
前記ビーコン位置取得部は、前記搬送波強度記憶部が記憶する搬送波の強度の最大値と、道路の延在方向に直交する方向におけるビーコン位置と搬送波の強度関係とに基づいて、道路の延在方向に直交する方向におけるビーコン位置を推定する
ことを特徴とする請求項7に記載の位置特定装置。
【請求項9】
自装置が存在する位置を特定する位置特定装置を用いた位置特定方法であって、
位置推定部は、自装置の位置を推定し、
ビーコン位置取得部は、信号を乗せた搬送波を射出するビーコンから受信した信号に基づいて、当該ビーコンによる搬送波の照射範囲内の位置であるビーコン位置を取得し、
位置特定部は、ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値を、前記ビーコン位置取得部が取得したビーコン位置の重みとして、前記位置推定部が推定した位置である推定位置と前記ビーコン位置との加重平均が示す位置を算出し、当該位置を自装置の位置として特定する
ことを特徴とする位置特定方法。
【請求項10】
自装置が存在する位置を特定する位置特定装置を、
自装置の位置を推定する位置推定部、
信号を乗せた搬送波を射出するビーコンから受信した信号に基づいて、当該ビーコンによる搬送波の照射範囲内の位置であるビーコン位置を取得するビーコン位置取得部、
ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値を、前記ビーコン位置取得部が取得したビーコン位置の重みとして、前記位置推定部が推定した位置である推定位置と前記ビーコン位置との加重平均が示す位置を算出し、当該位置を自装置の位置として特定する位置特定部
として機能させるためのプログラム。
【請求項1】
自装置の位置を推定する位置推定部と、
信号を乗せた搬送波を射出するビーコンから受信した信号に基づいて、当該ビーコンによる搬送波の照射範囲内の位置であるビーコン位置を取得するビーコン位置取得部と、
ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値を、前記ビーコン位置取得部が取得したビーコン位置の重みとして、前記位置推定部が推定した位置である推定位置と前記ビーコン位置との加重平均が示す位置を算出し、当該位置を自装置の位置として特定する位置特定部と
を備えることを特徴とする位置特定装置。
【請求項2】
前記位置特定部は、前記位置推定部による位置推定の誤差範囲が狭いほど大きい値を示す重み値を、前記推定位置の重みとして、前記推定位置と前記ビーコン位置との加重平均が示す位置を算出する
ことを特徴とする請求項1に記載の位置特定装置。
【請求項3】
前記ビーコン位置は、所定の直交座標系における前記ビーコンによる搬送波の照射範囲内の位置を示す行列であり、
前記推定位置は、前記直交座標系において自装置が存在すると推定される位置を示す行列であり、
前記ビーコン位置の重みは、前記直交座標系においてビーコンからの信号を正常に受信できる位置の分散を示す分散共分散行列である
ことを特徴とする請求項1または請求項2に記載の位置特定装置。
【請求項4】
前記ビーコン位置の重みは、自装置が設置された高さが高いほど小さい値を示すことを特徴とする請求項2に記載の位置特定装置。
【請求項5】
前記位置推定部が推定した推定位置に基づいて、自装置が存在する道路を特定する道路特定部と、
前記道路特定部が特定した道路に対応するビーコン位置の重みを取得するビーコン重み取得部と
を備え、
前記位置特定部は、前記ビーコン重み取得部が取得した重みを用いて自装置の位置として特定する
ことを特徴とする請求項1から請求項4の何れか1項に記載の位置特定装置。
【請求項6】
前記ビーコン位置取得部は、正常に信号の受信を完了したときに、当該信号の搬送波の強度と、前記ビーコン位置と搬送波の強度との関係とに基づいてビーコン位置を推定する
ことを特徴とする請求項1から請求項5の何れか1項に記載の位置特定装置。
【請求項7】
前記ビーコンからの搬送波の強度を、当該搬送波を受信した位置に関連付けて搬送波強度記憶部に遂次記録する搬送波強度記録部を備え、
前記ビーコン位置取得部は、前記搬送波強度記憶部が記憶する搬送波の強度の最大値に関連付けられた位置を、道路の延在方向におけるビーコン位置と推定する
ことを特徴とする請求項1から請求項5の何れか1項に記載の位置特定装置。
【請求項8】
前記ビーコン位置取得部は、前記搬送波強度記憶部が記憶する搬送波の強度の最大値と、道路の延在方向に直交する方向におけるビーコン位置と搬送波の強度関係とに基づいて、道路の延在方向に直交する方向におけるビーコン位置を推定する
ことを特徴とする請求項7に記載の位置特定装置。
【請求項9】
自装置が存在する位置を特定する位置特定装置を用いた位置特定方法であって、
位置推定部は、自装置の位置を推定し、
ビーコン位置取得部は、信号を乗せた搬送波を射出するビーコンから受信した信号に基づいて、当該ビーコンによる搬送波の照射範囲内の位置であるビーコン位置を取得し、
位置特定部は、ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値を、前記ビーコン位置取得部が取得したビーコン位置の重みとして、前記位置推定部が推定した位置である推定位置と前記ビーコン位置との加重平均が示す位置を算出し、当該位置を自装置の位置として特定する
ことを特徴とする位置特定方法。
【請求項10】
自装置が存在する位置を特定する位置特定装置を、
自装置の位置を推定する位置推定部、
信号を乗せた搬送波を射出するビーコンから受信した信号に基づいて、当該ビーコンによる搬送波の照射範囲内の位置であるビーコン位置を取得するビーコン位置取得部、
ビーコンによる搬送波の照射範囲が狭いほど大きい値を示す重み値を、前記ビーコン位置取得部が取得したビーコン位置の重みとして、前記位置推定部が推定した位置である推定位置と前記ビーコン位置との加重平均が示す位置を算出し、当該位置を自装置の位置として特定する位置特定部
として機能させるためのプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−73338(P2013−73338A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−210715(P2011−210715)
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月27日(2011.9.27)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]