
位置特定装置及び位置特定システム
【課題】車両などの移動体の位置を精度よく特定することができる位置特定装置及び位置特定システムを提供する。
【解決手段】時刻ずれ算出部51は、各通信部20、30、40が送信した時刻補正用信号を基準の通信部10で受信した受信時刻及び受信した時刻補正用信号に含まれる送信時刻に基づいて、基準の通信部10と各通信部20、30、40との時刻ずれを算出する。時刻補正部52は、基準の通信部10と、他の通信部20、30、40との時刻ずれを0にすべく時刻補正を行う。到達時間差算出部53は、車載機が送信した測位用信号を各通信部10〜40で受信した場合、各通信部10〜40での測位用信号の到達時間差として算出する。位置特定部54は、到達時間差に基づいて車載機の位置を特定する。
【解決手段】時刻ずれ算出部51は、各通信部20、30、40が送信した時刻補正用信号を基準の通信部10で受信した受信時刻及び受信した時刻補正用信号に含まれる送信時刻に基づいて、基準の通信部10と各通信部20、30、40との時刻ずれを算出する。時刻補正部52は、基準の通信部10と、他の通信部20、30、40との時刻ずれを0にすべく時刻補正を行う。到達時間差算出部53は、車載機が送信した測位用信号を各通信部10〜40で受信した場合、各通信部10〜40での測位用信号の到達時間差として算出する。位置特定部54は、到達時間差に基づいて車載機の位置を特定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、端末装置が送信した所定の信号を受信して端末装置の位置を特定する位置特定装置及び該位置特定装置を備える位置特定システムに関する。
【背景技術】
【0002】
従来、電波を放射する移動体などの未知局と称される電波源の位置を検出するシステムが開発されている。例えば、電波源が発射した電波を複数のセンサ局で受信し、各センサ局は、GPS受信機から出力された基準時刻をトリガとして一定時間の電波を取り出してフーリエ変換を施して複素周波数成分を抽出し、抽出した複素周波数成分をセンタ局へ送信する。センタ局は、各センサ局から送信された複素周波数成分間の複素共役積を算定し、各センサ局間の到達時間差を算定して電波源の位置を検出する位置検出システムが提案されている(特許文献1参照)。
【特許文献1】特許第3739078号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、特許文献1のシステムにあっては、GPSを利用して各センサ局の基準時刻を設定しているものの、GPS受信機の性能などによりセンサ局間の基準時刻は100〜200ナノ秒程度の誤差が含まれ、移動体の位置検出には、数十m程度の誤差が生じる。また、各センサ局の時刻がずれているか否かを監視する機能もなく、センサ局間で時刻を同期させる具体的な方法も開示されていない。このため、移動体の位置を精度よく検出することができるシステムが望まれていた。
【0004】
本発明は、斯かる事情に鑑みてなされたものであり、車両などの移動体の位置を精度よく特定することができる位置特定装置及び該位置特定装置を備える位置特定システムを提供することを目的とする。
【課題を解決するための手段】
【0005】
第1発明に係る位置特定装置は、離隔距離が既知の少なくとも2つの通信部を備え、端末装置が送信した所定の信号を各通信部で受信して該端末装置の位置を特定する位置特定装置であって、各通信部は、計時手段を備え、一の通信部を除く他の通信部は、送信時点を含む計時補正用信号を前記一の通信部へ送信するように構成してあり、前記一の通信部は、計時補正用信号を受信するように構成してあり、受信した計時補正用信号の受信時点及び前記送信時点並びに通信部間の離隔距離に基づいて、他の通信部との間の時刻ずれを算出する時刻ずれ算出手段と、端末装置が送信した所定の信号の各通信部での受信時点及び前記時刻ずれ算出手段で算出した時刻ずれに基づいて、前記所定の信号の通信部への到達時間の時間差を算出する時間差算出手段と、該時間差算出手段で算出した時間差に基づいて端末装置の位置を特定する特定手段とを備えることを特徴とする。
【0006】
第2発明に係る位置特定装置は、第1発明において、前記時刻ずれ算出手段で算出した時刻ずれに応じて、各計時手段での計時を補正する補正手段を備え、前記時間差算出手段は、端末装置が送信した所定の信号の各通信部での受信時点及び前記補正手段で補正した計時に基づいて、前記信号の通信部への到達時間の時間差を算出するように構成してあることを特徴とする。
【0007】
第3発明に係る位置特定装置は、第1発明又は第2発明において、前記所定の信号は、端末装置の位置特定用の信号であることを示す情報及び端末装置固有の識別子を含むことを特徴とする。
【0008】
第4発明に係る位置特定装置は、第1発明乃至第3発明のいずれか1つにおいて、端末装置の位置を特定する領域の道路形状情報を記憶する記憶手段を備え、前記特定手段は、記憶した道路形状情報を用いて端末装置の位置を特定するように構成してあることを特徴とする。
【0009】
第5発明に係る位置特定装置は、第1発明乃至第4発明のいずれか1つにおいて、端末装置の位置の高さ情報を記憶する記憶手段を備え、前記特定手段は、記憶した高さ情報を用いて端末装置の位置を特定するように構成してあることを特徴とする。
【0010】
第6発明に係る位置特定システムは、所定の信号を送信する端末装置と、第1発明乃至第5発明のいずれか1つに係る位置特定装置とを備え、前記端末装置の位置を特定するように構成してあることを特徴とする。
【0011】
第1発明にあっては、位置特定装置は、離隔距離が既知の少なくとも2つの通信部を備え、各通信部は、計時手段を備えている。位置特定装置は、一の通信部(以下、基準の通信部という。)を除く他の通信部から送信時点を含む計時補正用信号を基準の通信部へ送信し、基準の通信部で計時補正用信号を受信する。位置特定装置は、基準の通信部で受信した計時補正用信号の受信時点及び他の通信部での送信時点並びに通信部間の離隔距離に基づいて、基準の通信部と他の通信部との間の時刻ずれを算出する。例えば、送信時刻がt1、受信時刻がt2、2つの通信部間の電波の伝播時間をΔT12とすると、時刻t2が、時刻(t1+ΔT12)より遅れている場合には、他の通信部の時刻が基準の通信部の時刻よりも進んでおり、時刻t2が、時刻(t1+ΔT12)より進んでいる場合には、他の通信部の時刻が基準の通信部の時刻よりも遅れている。時刻ずれΔtは、(t2−t1)−ΔT12で求めることができる。Δt>0の場合は、他の通信部の時刻が基準の通信部の時刻よりも進んでおり、Δt<0の場合には、他の通信部の時刻が基準の通信部の時刻よりも遅れている。なお、2つの通信部間の電波の伝播時間ΔT12は、各通信部間の距離を電波の伝播速度(3×108 m/s)で除算することで求めることができる。
【0012】
位置特定装置は、端末装置(例えば、車両等の移動体に搭載された車載機、歩行者等の移動する人が携帯する携帯電話などの携帯通信装置など)が送信した所定の信号の各通信部での受信時点及び算出した時刻ずれに基づいて、所定の信号の通信部への到達時間の時間差を算出する。例えば、基準の通信部での受信時点をtm1、他の通信部での受信時点をtm2、両通信部の時刻ずれをΔtとすると、到達時間差ΔT12は、|tm1−tm2|−Δtで求めることができる。位置特定装置は、算出した時間差に基づいて端末装置の位置を特定する。例えば、2つの通信部の位置を焦点とし、2つの通信部間の到達時間差に電波の伝播速度を積算して求めた伝播行路差が等しい回転双曲面を特定することができる。このような回転双曲面を通信部の各対に対して特定することができ、端末装置の位置を回転双曲面の交点として特定することができる。
【0013】
これにより、通信部間の時刻ずれをリアルタイムで監視することができ、端末装置が送信した所定の信号を各通信部で受信した際に、各通信部での受信時点を正確に求めることができる。このため、端末装置から送信する所定の信号に送信時点に関する情報を含めることなく、通信部間の到達時間差を精度よく算出することができ、端末装置の位置を精度よく特定することができる。
【0014】
第2発明にあっては、位置特定装置は、算出した時刻ずれに応じて計時を補正する。位置特定装置は、端末装置が送信した所定の信号の各通信部での受信時点及び補正した計時に基づいて、所定の信号の通信部への到達時間の時間差を算出する。これにより、各通信部で時刻ずれが生じた場合でも各通信部の時刻ずれ分を補正することにより、所定の信号の通信部への到達時間の時間差を正確に求めることができる。
【0015】
第3発明にあっては、所定の信号は、端末装置の位置特定用の信号であることを示す情報及び端末装置固有の識別子を含む。これにより、位置特定装置は、各通信部で所定の信号を受信した場合、端末装置からの信号であることが分かる。また、位置特定装置は、多数の端末装置から所定の信号が送信された場合であっても、識別子によりどの端末装置から送信された信号であるかを判定することができ、各端末装置の位置をそれぞれ精度よく特定することができる。
【0016】
第4発明にあっては、位置特定装置は、端末装置の位置を特定する領域の道路形状情報を記憶してあり、記憶した道路情報を用いて端末装置の位置を特定する。例えば、位置特定装置は、道路形状情報に基づいて、端末装置の仮想的な走行面を特定する。位置特定装置は、1対の通信部を焦点とした回転双曲面を特定し、特定した回転双曲面と走行面との交線を端末装置の位置として特定する。これにより、2つの通信部を設置することで端末装置の位置を高精度に特定することができる。
【0017】
第5発明にあっては、位置特定装置は、端末装置の位置(例えば、車載機の搭載位置、携帯通信装置の装着位置など)の高さ情報を記憶してあり、記憶した高さ情報を用いて端末装置の位置を特定する。高さ情報を用いることにより、さらに精度よく端末装置の位置を特定することができる。
【0018】
第6発明にあっては、端末装置と位置特定装置とを備えることにより、端末装置の位置を精度よく特定することができる。
【発明の効果】
【0019】
本発明にあっては、通信部間の時刻ずれをリアルタイムで監視することができ、端末装置が送信した所定の信号を各通信部で受信した際に、各通信部での受信時点を正確に求めることができる。また、端末装置から送信する所定の信号に送信時点に関する情報を含めることなく、通信部間の到達時間差を精度よく算出することができ、端末装置の位置を精度よく特定することができる。
【発明を実施するための最良の形態】
【0020】
実施の形態1
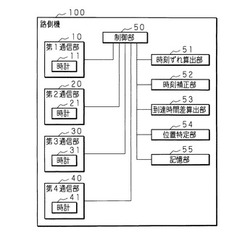
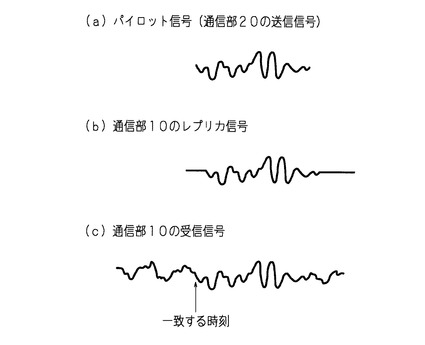
以下、本発明を実施の形態を示す図面に基づいて説明する。図1は本発明に係る位置特定装置としての路側機100の構成の一例を示すブロック図である。路側機100は、車両に搭載した車載機との間で路車間通信システム(位置特定システム)を構成するものである。路側機100は、第1通信部(基準の通信部)10、第2通信部20、第3通信部30、第4通信部40、制御部50、時刻ずれ算出部51、時刻補正部52、到達時間差算出部53、位置特定部54、記憶部55などを備えている。
【0021】
制御部50は、路側機100全体の動作の制御を行う。
【0022】
各通信部10〜40は、路側機100本体とは分離してあり、路側機100本体とは無線又は有線で通信を行うことができる。また、各通信部10〜40は、それぞれ所要の距離だけ離隔して設置してあり、各通信部10〜40の設置位置の情報又は離隔距離は、記憶部55に記憶してある。
【0023】
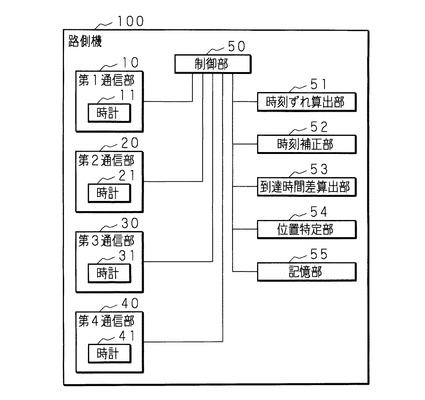
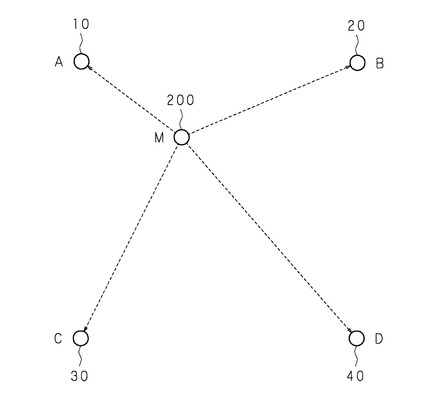
図2は各通信部10〜40の設置の一例を示す模式図である。図2に示すように、各通信部10、20、30、40は、それぞれ地点A、B、C、Dに設置してあり、例えば、地点AC間、地点AB間、地点CD間、及び地点BD間の距離は300m、地点AD間及び地点BC間の距離は450mである。また、地点A、B、C、Dで囲まれる領域及びその周辺領域が車載機200の位置を特定するために設定された領域となる。なお、各通信部10〜40の設置例は、これに限定されるものではない。
【0024】
各通信部10〜40は、例えば、VHF/UHF帯の周波数帯域において、相互に通信を行う通信機能を備えるとともに、車載機200との通信を行う通信機能を備える。各通信部10〜40は、基準クロック信号を生成する水晶発振器、基準クロック信号に基づいて動作する時計11、21、31、41(あるいは、タイマ又はカウンタでもよい)等の計時機構、変調回路、復調回路などを備え、他の通信部が送信する時刻補正用信号及び車載機200が送信する測位用信号を受信し、受信した信号を復調して元の情報を抽出する。各通信部10〜40は、信号の受信時点を算出し、算出した受信時点を制御部50へ出力する。
【0025】
図3は時刻補正用信号に含まれるデータ構造の例を示す説明図である。時刻補正用信号は、例えば、各通信部20、30、40から基準の通信部10へ送信される信号であり、各通信部10〜40での時刻ずれの算出、及び時刻ずれを補正するために適宜の間隔で繰り返し送受信される。図3に示すように、時刻補正用信号は、例えば、時刻補正用信号であることを示すパイロット信号、送信元の通信部ID、信号の送信時刻などのデータを含んでいる。なお、パイロット信号は、各通信部10〜40の間で既知の信号である。これにより、基準の通信部10は、時刻補正用信号であることが分かる。
【0026】
時刻ずれ算出部51は、第2通信部20が送信した時刻補正用信号を基準の通信部10で受信した受信時刻及び受信した時刻補正用信号に含まれる送信時刻に基づいて、基準の通信部10と第2通信部20との時刻ずれを算出する。例えば、送信時刻がt1、受信時刻がt2、各通信部10、20間の電波の伝播時間をΔT12とすると、時刻t2が、時刻(t1+ΔT12)より遅れている場合には、第2通信部20の時刻が基準の通信部10の時刻よりも進んでおり、時刻t2が、時刻(t1+ΔT12)より進んでいる場合には、第2通信部20の時刻が基準の通信部10の時刻よりも遅れている。時刻ずれΔtは、(t2−t1)−ΔT12で求めることができる。Δt>0の場合は、第2通信部20の時刻が基準の通信部10の時刻よりも進んでおり、Δt<0の場合には、第2通信部20の時刻が基準の通信部10の時刻よりも遅れている。なお、各通信部10、20間の電波の伝播時間ΔT12は、各通信部10、20間の距離を電波の伝播速度(3×108 m/s)で除算することで求めることができる。
【0027】
基準の通信部10と、第3通信部30及び第4通信部40との間も同様にして時刻ずれを算出することができる。
【0028】
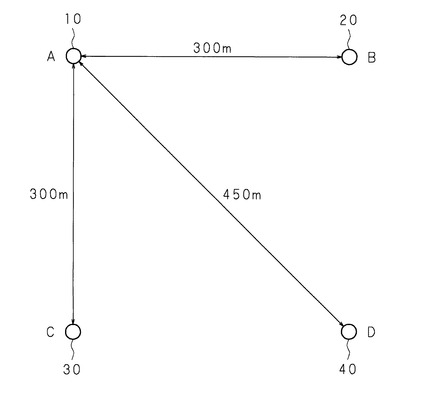
図4は時刻補正用信号の受信時刻の算出例を示す説明図である。図4の例は、通信部20から基準の通信部10へ時刻補正用信号が送信された場合を示すが、通信部30又は通信部40から基準の通信部10へ時刻補正用信号が送信された場合も同様である。図4(a)は通信部20が送信した時刻補正用信号のパイロット信号の一例を示し、図4(b)は基準の通信部10が予め記憶している相関処理(パターンマッチング)を行うためのレプリカ信号である。また、図4(c)は、通信部20が送信した時刻補正用信号を基準の通信部10で受信した際の受信信号である。図4(c)に示すように、受信信号を所定の時間間隔でサンプリングし、サンプリングした波形とレプリカ信号の波形が一致する時刻を受信時刻として測定する。
【0029】
時刻補正部52は、基準の通信部10と、他の通信部20、30、40との時刻ずれを0にすべく時刻補正を行う。例えば、基準の通信部10と、他の通信部20、30、40との時刻ずれを、それぞれΔt12、Δt13、Δt14とすると、時刻補正部52は、他の通信部20、30、40の時計をそれぞれ補正して、Δt12、Δt13、Δt14を0にする。この場合、時刻補正部52は、他の通信部20、30、40へそれぞれの時刻ずれΔt12、Δt13、Δt14を通知し、各通信部20、30、40が通知された時刻ずれを0にすべく時刻を補正する。
【0030】
到達時間差算出部53は、時刻補正部52で時刻が補正されている場合、車載機200が送信した測位用信号を各通信部10〜40で受信した場合、各通信部10〜40での測位用信号の受信時刻の差を測位用信号の到達時間差として算出する。この場合、到達時間差算出部53は、複数の車載機200から測位用信号を受信するときには、測位用信号に含まれる車載機IDに基づいて、同じ車載機IDを有する測位用信号の到達時間差を算出する。これにより、多数の車載機200から測位用信号が送信された場合であっても、どの車載機200から送信された測位用信号であるかを判定する。
【0031】
図5は車載機200が測位用信号を送信する一例を示す模式図であり、図6は測位用信号に含まれるデータ構造の例を示す説明図である。図5に示すように、車載機200は、任意の時点で測位用信号を送信すると、各通信部10〜40では、送信された測位用信号を受信し、その受信時刻を測定する。図6に示すように、測位用信号は、例えば、測位用信号であることを示すパイロット信号、車載機200を識別するための固有の識別子である車載機IDなどのデータを含んでいる。なお、パイロット信号は、車載機200と各通信部10〜40との間で既知の信号である。これにより、各通信部10〜40は、測位用信号であることがわかる。また、受信時刻の測定は、パイロット信号に基づいて、図4の例と同様に行うことができる。
【0032】
図5の例で、各通信部10〜40での測位用信号の受信時刻を、それぞれtm1、tm2、tm3、tm4とすると、基準の通信部10と通信部20との時刻ずれが0となるように既に補正されているので、基準の通信部10と通信部20との測位用信号の到達時間差ΔT12は、例えば、ΔT12=|tm1−tm2|で求めることができる。基準の通信部10と他の通信部30、40との到達時間差ΔT13、ΔT14についても同様に、ΔT13=|tm1−tm3|、ΔT14=|tm1−tm4|で求めることができる。
【0033】
なお、時刻ずれがすでに算出されているものの、時刻ずれの補正が行われていない場合には、例えば、基準の通信部10での受信時点をtm1、通信部20での受信時点をtm2、両通信部10、20の時刻ずれをΔt12とすると、到達時間差ΔT12は、|tm1−tm2|−Δt12で求めることができる。なお、Δt12>0の場合は、第2通信部20の時刻が基準の通信部10の時刻よりも進んでおり、Δt12<0の場合には、第2通信部20の時刻が基準の通信部10の時刻よりも遅れている。
【0034】
位置特定部54は、到達時間差算出部53で算出した到達時間差ΔT12、ΔT13、ΔT14に基づいて車載機200の位置を特定する。例えば、2つの通信部10、20の位置を焦点とし、2つの通信部間10、20の到達時間差ΔT12に電波の伝播速度(3×108 m/s)を積算して求めた伝播行路差が等しい回転双曲面を特定することができる。このような回転双曲面を基準の通信部10と他の通信部20、30、40の各対に対して特定することができ、車載機200の位置を回転双曲面の交点として特定することができる。なお、多数の車載機200から測位用信号が送信された場合であっても、車載機IDによりどの車載機200から送信された測位用信号であるかを判定することができ、各車載機200、…の位置をそれぞれ精度よく特定することができる。
【0035】
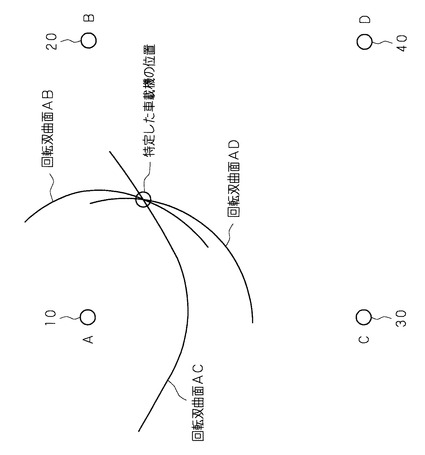
図7は車載機200の位置を特定する方法の一例を示す模式図である。図7に示すように、基準の通信部10と通信部20との間の到達時間差ΔT12に基づいて、回転双曲面ABを特定することができ、同様に、基準の通信部10と通信部30との間の到達時間差ΔT13に基づいて、回転双曲面ACを特定することができ、基準の通信部10と通信部30との間の到達時間差ΔT13に基づいて、回転双曲面ADを特定することができる。車載機200の位置は、回転双曲面AB、回転双曲面AC及び回転双曲面ADの交点として特定することができる。
【0036】
記憶部55は、時刻補正用信号及び測位用信号のパイロット信号のレプリカ信号、時刻ずれ算出部51で算出した各通信部の時刻ずれ、及び路側機100で処理した処理データ、各通信部10〜40の設置位置又は離隔距離等を記憶する。
【0037】
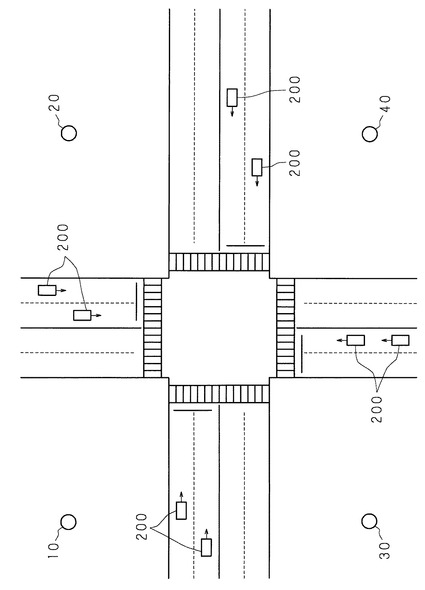
図8は路側機100の設置例を示す模式図である。図8の例では、交差点付近を囲むように、各通信部10〜40を、例えば、一辺が30m程度の正方形の各頂点に対応する位置に設置することにより、交差点付近を走行する車両に搭載された車載機200(車両)の位置を特定することができる。なお、路側機100の設置例は、一例であって、これに限定されるものではなく、例えば、複数の交差点を囲むように、各通信部10〜40を設置することもできる。また、路側機100の本体の設置位置は、適宜決定すればよい。
【0038】
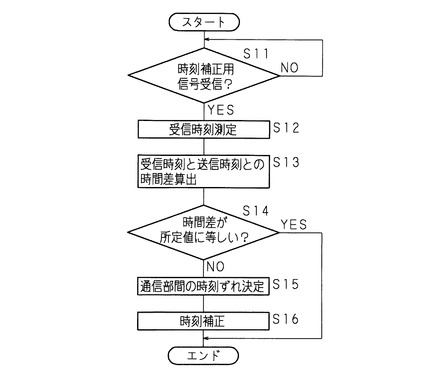
次に路側機100の動作について説明する。図9路側機100の時刻補正の処理手順を示すフローチャートである。制御部50は、基準の通信部10で他の通信部20、30、40から時刻補正用信号を受信したか否かを判定し(S11)、時刻補正用信号を受信していない場合(S11でNO)、ステップS11の処理を続ける。なお、制御部50は、各通信部10〜40での時刻ずれを監視すべく、所定の時間間隔で測位用信号を送信するように各通信部20、30、40を制御することができる。
【0039】
基準の通信部10で時刻補正用信号を受信した場合(S11でYES)、制御部50は、受信時刻を測定し(S12)、受信時刻と各通信部20、30、40から送信された時刻補正用信号に含まれる送信時刻との時間差を算出する(S13)。
【0040】
制御部50は、算出した時間差が所定値に等しいか否かを判定する(S14)。ここで、所定値は、基準の通信部10と他の通信部20、30、40それぞれとの間の電波の伝播時間である。算出した時間差が電波の伝播時間に等しい場合には、通信部間で時刻ずれがないと判定することができる。
【0041】
算出した時間差が所定値に等しくない場合(S14でNO)、制御部50は、算出した時間差に基づいて、通信部間の時刻ずれを決定し(S15)、時刻補正を行い(S16)、処理を終了する。算出した時間差が所定値に等しい場合(S14でYES)、制御部50は、時刻の補正が必要ないとして、処理を終了する。
【0042】
なお、図9の処理は、適宜繰り返し行うことができる。これにより、各通信部間の時刻ずれをリアルタイムで監視するとともに、時刻ずれを解消して、各通信部間の時刻を同一時刻に維持することができる。
【0043】
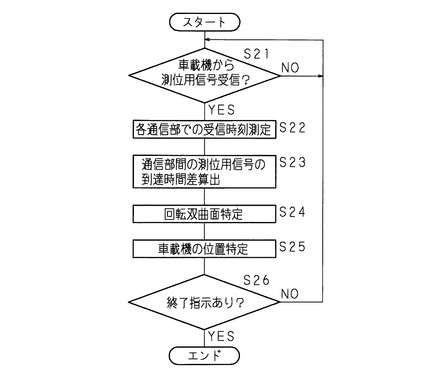
図10は路側機100の車載機200の位置特定処理の処理手順を示すフローチャートである。制御部50は、車載機200から測位用信号を受信したか否かを判定し(S21)、測位用信号を受信していない場合(S21でNO)、ステップS21の処理を続ける。
【0044】
測位用信号を受信した場合(S21でYES)、制御部50は、各通信部10〜40での受信時刻を測定し(S22)、通信部間の測位用信号の到達時間差を算出する(S23)。制御部50は、算出した到達時間差に基づいて、2つの通信部の位置を焦点とし、2つの通信部間の到達時間差に電波の伝播速度を積算して求めた伝播行路差が等しい回転双曲面を特定する(S24)。なお、制御部50は、このような回転双曲面を通信部の各対に対して特定する。
【0045】
制御部50は、回転双曲面の交点を車載機200の位置として特定する(S25)。制御部50は、処理の終了指示の有無を判定し(S26)、終了指示がない場合(S26でNO)、ステップS21以降の処理を続け、終了指示がある場合(S26でYES)、処理を終了する。
【0046】
実施の形態2
上述の実施の形態1では、通信部を4つ備える構成であったが、通信部の数はこれに限定されるものではない。例えば、車載機200を搭載した車両が走行する道路の道路形状情報、車載機200の搭載位置の高さ情報などを考慮することにより、通信部の数を2つに限定することもできる。以下、2つの通信部10、20を備える路側機100の場合について説明する。なお、この場合、路側機100は、図1の例において、第3通信部30、第4通信部40を除外した構成となる。
【0047】
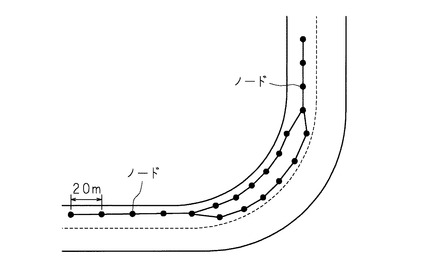
図11は道路形状情報の構造を示す説明図である。図11に示すように、道路形状情報は、道路を複数のノードにより所定の距離(例えば、20m)の区間に分割し、区間毎の距離、勾配、曲率などの情報により構成されている。道路が直線の場合、道路に沿って1つの直線上にノードが設定され、道路がカーブの場合、道路に沿って複数の直線上にノード(例えば、2つのノード)が設定される。これにより、カーブにより道路が傾斜している場合でも、2つの直線で決定される平面を特定することができる。
【0048】
また、道路形状情報は、記憶部55に予め記憶してあり、路側機100で車載機200の位置を特定する領域に存在する道路に関しての情報を記憶しておけばよい。
【0049】
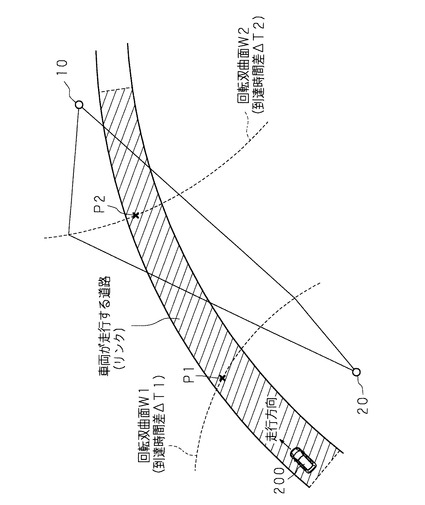
図12は実施の形態2の車載機200の位置を特定する例を示す説明図である。この場合、基準の通信部10及び通信部20を適長離隔(離隔距離は既知)して設置してある。道路上のある地点P1において、車載機200から測位用信号を受信した場合、制御部50は、各通信部10、20での測位用信号の到達時間ΔT1を算出する。制御部50は、測位用信号の到達時間差ΔT1に光速を積算することにより、到達時間差ΔT1に対応する距離を算出し、各通信部10、20の位置を焦点とし、算出した距離が等しくなる回転双曲面W1を特定する。すなわち、車載機200の位置は、回転双曲面W1上であることがわかる。
【0050】
一方、制御部50は、車載機200を搭載した車両が走行する道路(リンク:交差点間の道路)の道路形状情報と車載機200の高さ情報により、車両の仮想的な走行面を特定する。なお、道路が直線道路である場合には、走行面は平面であり、道路がカーブしている場合には、走行面は曲面となる。
【0051】
制御部50は、車載機200の位置を回転双曲面W1と走行面と交わる交線として特定する。これにより、2つの通信部10、20を備えるだけで、車載機200の位置を精度良く特定することが可能となる。
【0052】
車両がさらに走行を続け、道路上の地点P2で測位用信号を送信したとすると、地点P1の場合と同様に、制御部50は、測位用信号の到達時間差ΔT2に光速を積算することにより、到達時間差ΔT2に対応する距離を算出し、通信部10、20の位置を焦点とし、算出した距離が等しくなる回転双曲面W2を特定する。
【0053】
一方、制御部50は、各通信部10、20から測位用信号を受信した場合、車載機200を搭載した車両が走行する道路の道路形状情報と車載機200の高さ情報により、車両の仮想的な走行面を特定する。
【0054】
制御部50は、車載機200の位置を回転双曲面W2と走行面と交わる交線として特定する。以降、同様の動作を繰り返すことにより、制御部50は、車載機200が測位用信号を送信する都度、測位用信号を受信して、車載機200の位置を精度良く特定し続けることができる。なお、この場合、走行面の幅は車線幅(複数車線の場合は道路幅)に相当するが、車両は車線のほぼ中央を走行すると考えられるので、走行面の幅方向の誤差は許容できる範囲内である。
【0055】
これにより、2つの通信部を設置することで車載機200の位置を高精度に特定することができる。また、道路形状情報に加えて、車載機200の高さ情報を考慮することにより、さらに精度よく車載機200の位置を特定することができる。
【0056】
実施の形態3
上述の実施の形態1、2の位置特定装置又は位置特定システムにおいて、車載機200自体にGPS等による自律的な自車両存在位置計測機能を備える構成とすることもできる。この場合、車載機200は、近隣を走行する他の車両の車載機との間で、自律的に計測した自車両存在位置を情報交換し合うようにすることができる。車載機200相互間で、お互いの位置情報を送受信しあうことで、各車両の車載機200は、自車両の周囲にどれくらいの台数の車両が存在するのか、どの程度接近した位置にいるのか等の情報を把握することができ、運転者の安全運転を支援することが可能になる。
【0057】
このような装置又はシステムでは、各車両が自律的に認識している自車位置が、所定以上の誤差を有する場合がある。位置情報に所定以上の誤差があると、その位置情報を受信した他の車両が、実際にはある程度離隔しているのにすぐそばに存在すると勘違いする可能性があり、交通の安全性を高めるという目的にそぐわないことがある。そこで、実施の形態1、2において示した路側機100を配置する構成を採用することで、各車両の位置を路側機100で測位すると共に、車載機200が送受信している位置情報を路側機100が傍受し、路側機100が把握している車両の存在位置と車載機200自身が認識する存在位置とが所定以上の誤差を有する場合に、路側機100がその車載機200に対して警告情報を送ることができる。
【0058】
上述の警告情報には、例えば、路側機100が測位した車両の位置に関する情報や誤差がどの程度であったかを知ることのできる情報を含ませておき、車載機200自身の有する自律的な測位機能に問題があることを瞬時に把握できるようにしておくことが望ましい。さらに、自律的な測位機能に問題のある車両の周囲を走行する車両の車載機200に対しても警告情報を送り、車車間通信で送受信される特定の車両の位置情報に誤差があることを知らせることもできる。
【0059】
以上のように、本発明にあっては、路側機100による測位を、車両の自律的な測位機能の補完として活用することもできる。
【0060】
以上説明したように、本発明にあっては、通信部間の時刻ずれをリアルタイムで監視することができ、車載機が送信した所定の信号を各通信部で受信した際に、各通信部での受信時点を正確に求めることができる。このため、車載機から送信する所定の信号に送信時点に関する情報を含めることなく、通信部間の到達時間差を精度よく算出することができ、車載機の位置を精度よく特定することができる。
【0061】
上述の実施の形態では、路側機100に各通信部10〜40を含む構成であったが、各通信部10〜40を別個の通信装置として構成することもできる。また、路側機100の制御部50、時刻ずれ算出部51、時刻補正部52、到達時間差算出部53、位置特定部54、記憶部55を基準の通信部10内に構成することもできる。また、位置特定装置としての路側機は一例であり、信号制御機などの他の装置として実現することもできる。
【0062】
上述の実施の形態において、路側機100で車載機200の位置を特定した場合、特定した位置を元の車載機200へ送信する構成とすることもできる。また、多数の車載機200が存在するときでも、車載機IDにより、どの車載機200へ特定した位置を送信すればよいかが分かる。この場合、本発明を用いることにより、例えば、車載機200で前方の信号機の表示情報を受信し、受信した表示情報に基づいて交差点の手前で安全に停止することができるか否か、あるいは、交差点を安全に通過することができるか否かを高精度に判定し、判定結果に応じて運転者に音声で注意を促すことができる。また、車載機200で受信した信号機の表示情報に基づいて、交差点を安全に通過することができるか否かを高精度に判定し、判定結果に応じて車両のブレーキ制御を行うこともでき、交通事故を未然に防止して交通の安全性を高めることができる。
【0063】
上述の実施の形態では、時刻ずれを算出し、時刻ずれを補正する構成であったが、これに限定されるものではなく、計時手段としては時計の他に、タイマ又はカウンタ等で構成することもでき、これらの計数値のずれを算出し、計数値ずれを補正する構成とすることもできる。すなわち、時刻ずれには、これらの計数値のずれも含む。
【0064】
上述の実施の形態では、端末装置として車載機を例に挙げて説明したが、端末装置は車載機に限定されるものではなく、歩行者等の移動する人が携帯する携帯通信装置(例えば、携帯電話、通信機能を有するPDA又は音楽・動画再生装置、ノート型パーソナルコンピュータ等)であってもよい。
【0065】
開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0066】
【図1】本発明に係る位置特定装置としての路側機の構成の一例を示すブロック図である。
【図2】各通信部の設置の一例を示す模式図である。
【図3】時刻補正用信号に含まれるデータ構造の例を示す説明図である。
【図4】時刻補正用信号の受信時刻の算出例を示す説明図である。
【図5】車載機が測位用信号を送信する一例を示す模式図である。
【図6】測位用信号に含まれるデータ構造の例を示す説明図である。
【図7】車載機の位置を特定する方法の一例を示す模式図である。
【図8】路側機の設置例を示す模式図である。
【図9】路側機の時刻補正の処理手順を示すフローチャートである。
【図10】路側機の車載機の位置特定処理の処理手順を示すフローチャートである。
【図11】道路形状情報の構造を示す説明図である。
【図12】実施の形態2の車載機の位置を特定する例を示す説明図である。
【符号の説明】
【0067】
10 第1通信部
20 第2通信部
30 第3通信部
40 第4通信部
11、21、31、41 時計
50 制御部
51 時刻ずれ算出部
52 時刻補正部
53 到達時間差算出部
54 位置特定部
55 記憶部
100 路側機
200 車載機
【技術分野】
【0001】
本発明は、端末装置が送信した所定の信号を受信して端末装置の位置を特定する位置特定装置及び該位置特定装置を備える位置特定システムに関する。
【背景技術】
【0002】
従来、電波を放射する移動体などの未知局と称される電波源の位置を検出するシステムが開発されている。例えば、電波源が発射した電波を複数のセンサ局で受信し、各センサ局は、GPS受信機から出力された基準時刻をトリガとして一定時間の電波を取り出してフーリエ変換を施して複素周波数成分を抽出し、抽出した複素周波数成分をセンタ局へ送信する。センタ局は、各センサ局から送信された複素周波数成分間の複素共役積を算定し、各センサ局間の到達時間差を算定して電波源の位置を検出する位置検出システムが提案されている(特許文献1参照)。
【特許文献1】特許第3739078号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、特許文献1のシステムにあっては、GPSを利用して各センサ局の基準時刻を設定しているものの、GPS受信機の性能などによりセンサ局間の基準時刻は100〜200ナノ秒程度の誤差が含まれ、移動体の位置検出には、数十m程度の誤差が生じる。また、各センサ局の時刻がずれているか否かを監視する機能もなく、センサ局間で時刻を同期させる具体的な方法も開示されていない。このため、移動体の位置を精度よく検出することができるシステムが望まれていた。
【0004】
本発明は、斯かる事情に鑑みてなされたものであり、車両などの移動体の位置を精度よく特定することができる位置特定装置及び該位置特定装置を備える位置特定システムを提供することを目的とする。
【課題を解決するための手段】
【0005】
第1発明に係る位置特定装置は、離隔距離が既知の少なくとも2つの通信部を備え、端末装置が送信した所定の信号を各通信部で受信して該端末装置の位置を特定する位置特定装置であって、各通信部は、計時手段を備え、一の通信部を除く他の通信部は、送信時点を含む計時補正用信号を前記一の通信部へ送信するように構成してあり、前記一の通信部は、計時補正用信号を受信するように構成してあり、受信した計時補正用信号の受信時点及び前記送信時点並びに通信部間の離隔距離に基づいて、他の通信部との間の時刻ずれを算出する時刻ずれ算出手段と、端末装置が送信した所定の信号の各通信部での受信時点及び前記時刻ずれ算出手段で算出した時刻ずれに基づいて、前記所定の信号の通信部への到達時間の時間差を算出する時間差算出手段と、該時間差算出手段で算出した時間差に基づいて端末装置の位置を特定する特定手段とを備えることを特徴とする。
【0006】
第2発明に係る位置特定装置は、第1発明において、前記時刻ずれ算出手段で算出した時刻ずれに応じて、各計時手段での計時を補正する補正手段を備え、前記時間差算出手段は、端末装置が送信した所定の信号の各通信部での受信時点及び前記補正手段で補正した計時に基づいて、前記信号の通信部への到達時間の時間差を算出するように構成してあることを特徴とする。
【0007】
第3発明に係る位置特定装置は、第1発明又は第2発明において、前記所定の信号は、端末装置の位置特定用の信号であることを示す情報及び端末装置固有の識別子を含むことを特徴とする。
【0008】
第4発明に係る位置特定装置は、第1発明乃至第3発明のいずれか1つにおいて、端末装置の位置を特定する領域の道路形状情報を記憶する記憶手段を備え、前記特定手段は、記憶した道路形状情報を用いて端末装置の位置を特定するように構成してあることを特徴とする。
【0009】
第5発明に係る位置特定装置は、第1発明乃至第4発明のいずれか1つにおいて、端末装置の位置の高さ情報を記憶する記憶手段を備え、前記特定手段は、記憶した高さ情報を用いて端末装置の位置を特定するように構成してあることを特徴とする。
【0010】
第6発明に係る位置特定システムは、所定の信号を送信する端末装置と、第1発明乃至第5発明のいずれか1つに係る位置特定装置とを備え、前記端末装置の位置を特定するように構成してあることを特徴とする。
【0011】
第1発明にあっては、位置特定装置は、離隔距離が既知の少なくとも2つの通信部を備え、各通信部は、計時手段を備えている。位置特定装置は、一の通信部(以下、基準の通信部という。)を除く他の通信部から送信時点を含む計時補正用信号を基準の通信部へ送信し、基準の通信部で計時補正用信号を受信する。位置特定装置は、基準の通信部で受信した計時補正用信号の受信時点及び他の通信部での送信時点並びに通信部間の離隔距離に基づいて、基準の通信部と他の通信部との間の時刻ずれを算出する。例えば、送信時刻がt1、受信時刻がt2、2つの通信部間の電波の伝播時間をΔT12とすると、時刻t2が、時刻(t1+ΔT12)より遅れている場合には、他の通信部の時刻が基準の通信部の時刻よりも進んでおり、時刻t2が、時刻(t1+ΔT12)より進んでいる場合には、他の通信部の時刻が基準の通信部の時刻よりも遅れている。時刻ずれΔtは、(t2−t1)−ΔT12で求めることができる。Δt>0の場合は、他の通信部の時刻が基準の通信部の時刻よりも進んでおり、Δt<0の場合には、他の通信部の時刻が基準の通信部の時刻よりも遅れている。なお、2つの通信部間の電波の伝播時間ΔT12は、各通信部間の距離を電波の伝播速度(3×108 m/s)で除算することで求めることができる。
【0012】
位置特定装置は、端末装置(例えば、車両等の移動体に搭載された車載機、歩行者等の移動する人が携帯する携帯電話などの携帯通信装置など)が送信した所定の信号の各通信部での受信時点及び算出した時刻ずれに基づいて、所定の信号の通信部への到達時間の時間差を算出する。例えば、基準の通信部での受信時点をtm1、他の通信部での受信時点をtm2、両通信部の時刻ずれをΔtとすると、到達時間差ΔT12は、|tm1−tm2|−Δtで求めることができる。位置特定装置は、算出した時間差に基づいて端末装置の位置を特定する。例えば、2つの通信部の位置を焦点とし、2つの通信部間の到達時間差に電波の伝播速度を積算して求めた伝播行路差が等しい回転双曲面を特定することができる。このような回転双曲面を通信部の各対に対して特定することができ、端末装置の位置を回転双曲面の交点として特定することができる。
【0013】
これにより、通信部間の時刻ずれをリアルタイムで監視することができ、端末装置が送信した所定の信号を各通信部で受信した際に、各通信部での受信時点を正確に求めることができる。このため、端末装置から送信する所定の信号に送信時点に関する情報を含めることなく、通信部間の到達時間差を精度よく算出することができ、端末装置の位置を精度よく特定することができる。
【0014】
第2発明にあっては、位置特定装置は、算出した時刻ずれに応じて計時を補正する。位置特定装置は、端末装置が送信した所定の信号の各通信部での受信時点及び補正した計時に基づいて、所定の信号の通信部への到達時間の時間差を算出する。これにより、各通信部で時刻ずれが生じた場合でも各通信部の時刻ずれ分を補正することにより、所定の信号の通信部への到達時間の時間差を正確に求めることができる。
【0015】
第3発明にあっては、所定の信号は、端末装置の位置特定用の信号であることを示す情報及び端末装置固有の識別子を含む。これにより、位置特定装置は、各通信部で所定の信号を受信した場合、端末装置からの信号であることが分かる。また、位置特定装置は、多数の端末装置から所定の信号が送信された場合であっても、識別子によりどの端末装置から送信された信号であるかを判定することができ、各端末装置の位置をそれぞれ精度よく特定することができる。
【0016】
第4発明にあっては、位置特定装置は、端末装置の位置を特定する領域の道路形状情報を記憶してあり、記憶した道路情報を用いて端末装置の位置を特定する。例えば、位置特定装置は、道路形状情報に基づいて、端末装置の仮想的な走行面を特定する。位置特定装置は、1対の通信部を焦点とした回転双曲面を特定し、特定した回転双曲面と走行面との交線を端末装置の位置として特定する。これにより、2つの通信部を設置することで端末装置の位置を高精度に特定することができる。
【0017】
第5発明にあっては、位置特定装置は、端末装置の位置(例えば、車載機の搭載位置、携帯通信装置の装着位置など)の高さ情報を記憶してあり、記憶した高さ情報を用いて端末装置の位置を特定する。高さ情報を用いることにより、さらに精度よく端末装置の位置を特定することができる。
【0018】
第6発明にあっては、端末装置と位置特定装置とを備えることにより、端末装置の位置を精度よく特定することができる。
【発明の効果】
【0019】
本発明にあっては、通信部間の時刻ずれをリアルタイムで監視することができ、端末装置が送信した所定の信号を各通信部で受信した際に、各通信部での受信時点を正確に求めることができる。また、端末装置から送信する所定の信号に送信時点に関する情報を含めることなく、通信部間の到達時間差を精度よく算出することができ、端末装置の位置を精度よく特定することができる。
【発明を実施するための最良の形態】
【0020】
実施の形態1
以下、本発明を実施の形態を示す図面に基づいて説明する。図1は本発明に係る位置特定装置としての路側機100の構成の一例を示すブロック図である。路側機100は、車両に搭載した車載機との間で路車間通信システム(位置特定システム)を構成するものである。路側機100は、第1通信部(基準の通信部)10、第2通信部20、第3通信部30、第4通信部40、制御部50、時刻ずれ算出部51、時刻補正部52、到達時間差算出部53、位置特定部54、記憶部55などを備えている。
【0021】
制御部50は、路側機100全体の動作の制御を行う。
【0022】
各通信部10〜40は、路側機100本体とは分離してあり、路側機100本体とは無線又は有線で通信を行うことができる。また、各通信部10〜40は、それぞれ所要の距離だけ離隔して設置してあり、各通信部10〜40の設置位置の情報又は離隔距離は、記憶部55に記憶してある。
【0023】
図2は各通信部10〜40の設置の一例を示す模式図である。図2に示すように、各通信部10、20、30、40は、それぞれ地点A、B、C、Dに設置してあり、例えば、地点AC間、地点AB間、地点CD間、及び地点BD間の距離は300m、地点AD間及び地点BC間の距離は450mである。また、地点A、B、C、Dで囲まれる領域及びその周辺領域が車載機200の位置を特定するために設定された領域となる。なお、各通信部10〜40の設置例は、これに限定されるものではない。
【0024】
各通信部10〜40は、例えば、VHF/UHF帯の周波数帯域において、相互に通信を行う通信機能を備えるとともに、車載機200との通信を行う通信機能を備える。各通信部10〜40は、基準クロック信号を生成する水晶発振器、基準クロック信号に基づいて動作する時計11、21、31、41(あるいは、タイマ又はカウンタでもよい)等の計時機構、変調回路、復調回路などを備え、他の通信部が送信する時刻補正用信号及び車載機200が送信する測位用信号を受信し、受信した信号を復調して元の情報を抽出する。各通信部10〜40は、信号の受信時点を算出し、算出した受信時点を制御部50へ出力する。
【0025】
図3は時刻補正用信号に含まれるデータ構造の例を示す説明図である。時刻補正用信号は、例えば、各通信部20、30、40から基準の通信部10へ送信される信号であり、各通信部10〜40での時刻ずれの算出、及び時刻ずれを補正するために適宜の間隔で繰り返し送受信される。図3に示すように、時刻補正用信号は、例えば、時刻補正用信号であることを示すパイロット信号、送信元の通信部ID、信号の送信時刻などのデータを含んでいる。なお、パイロット信号は、各通信部10〜40の間で既知の信号である。これにより、基準の通信部10は、時刻補正用信号であることが分かる。
【0026】
時刻ずれ算出部51は、第2通信部20が送信した時刻補正用信号を基準の通信部10で受信した受信時刻及び受信した時刻補正用信号に含まれる送信時刻に基づいて、基準の通信部10と第2通信部20との時刻ずれを算出する。例えば、送信時刻がt1、受信時刻がt2、各通信部10、20間の電波の伝播時間をΔT12とすると、時刻t2が、時刻(t1+ΔT12)より遅れている場合には、第2通信部20の時刻が基準の通信部10の時刻よりも進んでおり、時刻t2が、時刻(t1+ΔT12)より進んでいる場合には、第2通信部20の時刻が基準の通信部10の時刻よりも遅れている。時刻ずれΔtは、(t2−t1)−ΔT12で求めることができる。Δt>0の場合は、第2通信部20の時刻が基準の通信部10の時刻よりも進んでおり、Δt<0の場合には、第2通信部20の時刻が基準の通信部10の時刻よりも遅れている。なお、各通信部10、20間の電波の伝播時間ΔT12は、各通信部10、20間の距離を電波の伝播速度(3×108 m/s)で除算することで求めることができる。
【0027】
基準の通信部10と、第3通信部30及び第4通信部40との間も同様にして時刻ずれを算出することができる。
【0028】
図4は時刻補正用信号の受信時刻の算出例を示す説明図である。図4の例は、通信部20から基準の通信部10へ時刻補正用信号が送信された場合を示すが、通信部30又は通信部40から基準の通信部10へ時刻補正用信号が送信された場合も同様である。図4(a)は通信部20が送信した時刻補正用信号のパイロット信号の一例を示し、図4(b)は基準の通信部10が予め記憶している相関処理(パターンマッチング)を行うためのレプリカ信号である。また、図4(c)は、通信部20が送信した時刻補正用信号を基準の通信部10で受信した際の受信信号である。図4(c)に示すように、受信信号を所定の時間間隔でサンプリングし、サンプリングした波形とレプリカ信号の波形が一致する時刻を受信時刻として測定する。
【0029】
時刻補正部52は、基準の通信部10と、他の通信部20、30、40との時刻ずれを0にすべく時刻補正を行う。例えば、基準の通信部10と、他の通信部20、30、40との時刻ずれを、それぞれΔt12、Δt13、Δt14とすると、時刻補正部52は、他の通信部20、30、40の時計をそれぞれ補正して、Δt12、Δt13、Δt14を0にする。この場合、時刻補正部52は、他の通信部20、30、40へそれぞれの時刻ずれΔt12、Δt13、Δt14を通知し、各通信部20、30、40が通知された時刻ずれを0にすべく時刻を補正する。
【0030】
到達時間差算出部53は、時刻補正部52で時刻が補正されている場合、車載機200が送信した測位用信号を各通信部10〜40で受信した場合、各通信部10〜40での測位用信号の受信時刻の差を測位用信号の到達時間差として算出する。この場合、到達時間差算出部53は、複数の車載機200から測位用信号を受信するときには、測位用信号に含まれる車載機IDに基づいて、同じ車載機IDを有する測位用信号の到達時間差を算出する。これにより、多数の車載機200から測位用信号が送信された場合であっても、どの車載機200から送信された測位用信号であるかを判定する。
【0031】
図5は車載機200が測位用信号を送信する一例を示す模式図であり、図6は測位用信号に含まれるデータ構造の例を示す説明図である。図5に示すように、車載機200は、任意の時点で測位用信号を送信すると、各通信部10〜40では、送信された測位用信号を受信し、その受信時刻を測定する。図6に示すように、測位用信号は、例えば、測位用信号であることを示すパイロット信号、車載機200を識別するための固有の識別子である車載機IDなどのデータを含んでいる。なお、パイロット信号は、車載機200と各通信部10〜40との間で既知の信号である。これにより、各通信部10〜40は、測位用信号であることがわかる。また、受信時刻の測定は、パイロット信号に基づいて、図4の例と同様に行うことができる。
【0032】
図5の例で、各通信部10〜40での測位用信号の受信時刻を、それぞれtm1、tm2、tm3、tm4とすると、基準の通信部10と通信部20との時刻ずれが0となるように既に補正されているので、基準の通信部10と通信部20との測位用信号の到達時間差ΔT12は、例えば、ΔT12=|tm1−tm2|で求めることができる。基準の通信部10と他の通信部30、40との到達時間差ΔT13、ΔT14についても同様に、ΔT13=|tm1−tm3|、ΔT14=|tm1−tm4|で求めることができる。
【0033】
なお、時刻ずれがすでに算出されているものの、時刻ずれの補正が行われていない場合には、例えば、基準の通信部10での受信時点をtm1、通信部20での受信時点をtm2、両通信部10、20の時刻ずれをΔt12とすると、到達時間差ΔT12は、|tm1−tm2|−Δt12で求めることができる。なお、Δt12>0の場合は、第2通信部20の時刻が基準の通信部10の時刻よりも進んでおり、Δt12<0の場合には、第2通信部20の時刻が基準の通信部10の時刻よりも遅れている。
【0034】
位置特定部54は、到達時間差算出部53で算出した到達時間差ΔT12、ΔT13、ΔT14に基づいて車載機200の位置を特定する。例えば、2つの通信部10、20の位置を焦点とし、2つの通信部間10、20の到達時間差ΔT12に電波の伝播速度(3×108 m/s)を積算して求めた伝播行路差が等しい回転双曲面を特定することができる。このような回転双曲面を基準の通信部10と他の通信部20、30、40の各対に対して特定することができ、車載機200の位置を回転双曲面の交点として特定することができる。なお、多数の車載機200から測位用信号が送信された場合であっても、車載機IDによりどの車載機200から送信された測位用信号であるかを判定することができ、各車載機200、…の位置をそれぞれ精度よく特定することができる。
【0035】
図7は車載機200の位置を特定する方法の一例を示す模式図である。図7に示すように、基準の通信部10と通信部20との間の到達時間差ΔT12に基づいて、回転双曲面ABを特定することができ、同様に、基準の通信部10と通信部30との間の到達時間差ΔT13に基づいて、回転双曲面ACを特定することができ、基準の通信部10と通信部30との間の到達時間差ΔT13に基づいて、回転双曲面ADを特定することができる。車載機200の位置は、回転双曲面AB、回転双曲面AC及び回転双曲面ADの交点として特定することができる。
【0036】
記憶部55は、時刻補正用信号及び測位用信号のパイロット信号のレプリカ信号、時刻ずれ算出部51で算出した各通信部の時刻ずれ、及び路側機100で処理した処理データ、各通信部10〜40の設置位置又は離隔距離等を記憶する。
【0037】
図8は路側機100の設置例を示す模式図である。図8の例では、交差点付近を囲むように、各通信部10〜40を、例えば、一辺が30m程度の正方形の各頂点に対応する位置に設置することにより、交差点付近を走行する車両に搭載された車載機200(車両)の位置を特定することができる。なお、路側機100の設置例は、一例であって、これに限定されるものではなく、例えば、複数の交差点を囲むように、各通信部10〜40を設置することもできる。また、路側機100の本体の設置位置は、適宜決定すればよい。
【0038】
次に路側機100の動作について説明する。図9路側機100の時刻補正の処理手順を示すフローチャートである。制御部50は、基準の通信部10で他の通信部20、30、40から時刻補正用信号を受信したか否かを判定し(S11)、時刻補正用信号を受信していない場合(S11でNO)、ステップS11の処理を続ける。なお、制御部50は、各通信部10〜40での時刻ずれを監視すべく、所定の時間間隔で測位用信号を送信するように各通信部20、30、40を制御することができる。
【0039】
基準の通信部10で時刻補正用信号を受信した場合(S11でYES)、制御部50は、受信時刻を測定し(S12)、受信時刻と各通信部20、30、40から送信された時刻補正用信号に含まれる送信時刻との時間差を算出する(S13)。
【0040】
制御部50は、算出した時間差が所定値に等しいか否かを判定する(S14)。ここで、所定値は、基準の通信部10と他の通信部20、30、40それぞれとの間の電波の伝播時間である。算出した時間差が電波の伝播時間に等しい場合には、通信部間で時刻ずれがないと判定することができる。
【0041】
算出した時間差が所定値に等しくない場合(S14でNO)、制御部50は、算出した時間差に基づいて、通信部間の時刻ずれを決定し(S15)、時刻補正を行い(S16)、処理を終了する。算出した時間差が所定値に等しい場合(S14でYES)、制御部50は、時刻の補正が必要ないとして、処理を終了する。
【0042】
なお、図9の処理は、適宜繰り返し行うことができる。これにより、各通信部間の時刻ずれをリアルタイムで監視するとともに、時刻ずれを解消して、各通信部間の時刻を同一時刻に維持することができる。
【0043】
図10は路側機100の車載機200の位置特定処理の処理手順を示すフローチャートである。制御部50は、車載機200から測位用信号を受信したか否かを判定し(S21)、測位用信号を受信していない場合(S21でNO)、ステップS21の処理を続ける。
【0044】
測位用信号を受信した場合(S21でYES)、制御部50は、各通信部10〜40での受信時刻を測定し(S22)、通信部間の測位用信号の到達時間差を算出する(S23)。制御部50は、算出した到達時間差に基づいて、2つの通信部の位置を焦点とし、2つの通信部間の到達時間差に電波の伝播速度を積算して求めた伝播行路差が等しい回転双曲面を特定する(S24)。なお、制御部50は、このような回転双曲面を通信部の各対に対して特定する。
【0045】
制御部50は、回転双曲面の交点を車載機200の位置として特定する(S25)。制御部50は、処理の終了指示の有無を判定し(S26)、終了指示がない場合(S26でNO)、ステップS21以降の処理を続け、終了指示がある場合(S26でYES)、処理を終了する。
【0046】
実施の形態2
上述の実施の形態1では、通信部を4つ備える構成であったが、通信部の数はこれに限定されるものではない。例えば、車載機200を搭載した車両が走行する道路の道路形状情報、車載機200の搭載位置の高さ情報などを考慮することにより、通信部の数を2つに限定することもできる。以下、2つの通信部10、20を備える路側機100の場合について説明する。なお、この場合、路側機100は、図1の例において、第3通信部30、第4通信部40を除外した構成となる。
【0047】
図11は道路形状情報の構造を示す説明図である。図11に示すように、道路形状情報は、道路を複数のノードにより所定の距離(例えば、20m)の区間に分割し、区間毎の距離、勾配、曲率などの情報により構成されている。道路が直線の場合、道路に沿って1つの直線上にノードが設定され、道路がカーブの場合、道路に沿って複数の直線上にノード(例えば、2つのノード)が設定される。これにより、カーブにより道路が傾斜している場合でも、2つの直線で決定される平面を特定することができる。
【0048】
また、道路形状情報は、記憶部55に予め記憶してあり、路側機100で車載機200の位置を特定する領域に存在する道路に関しての情報を記憶しておけばよい。
【0049】
図12は実施の形態2の車載機200の位置を特定する例を示す説明図である。この場合、基準の通信部10及び通信部20を適長離隔(離隔距離は既知)して設置してある。道路上のある地点P1において、車載機200から測位用信号を受信した場合、制御部50は、各通信部10、20での測位用信号の到達時間ΔT1を算出する。制御部50は、測位用信号の到達時間差ΔT1に光速を積算することにより、到達時間差ΔT1に対応する距離を算出し、各通信部10、20の位置を焦点とし、算出した距離が等しくなる回転双曲面W1を特定する。すなわち、車載機200の位置は、回転双曲面W1上であることがわかる。
【0050】
一方、制御部50は、車載機200を搭載した車両が走行する道路(リンク:交差点間の道路)の道路形状情報と車載機200の高さ情報により、車両の仮想的な走行面を特定する。なお、道路が直線道路である場合には、走行面は平面であり、道路がカーブしている場合には、走行面は曲面となる。
【0051】
制御部50は、車載機200の位置を回転双曲面W1と走行面と交わる交線として特定する。これにより、2つの通信部10、20を備えるだけで、車載機200の位置を精度良く特定することが可能となる。
【0052】
車両がさらに走行を続け、道路上の地点P2で測位用信号を送信したとすると、地点P1の場合と同様に、制御部50は、測位用信号の到達時間差ΔT2に光速を積算することにより、到達時間差ΔT2に対応する距離を算出し、通信部10、20の位置を焦点とし、算出した距離が等しくなる回転双曲面W2を特定する。
【0053】
一方、制御部50は、各通信部10、20から測位用信号を受信した場合、車載機200を搭載した車両が走行する道路の道路形状情報と車載機200の高さ情報により、車両の仮想的な走行面を特定する。
【0054】
制御部50は、車載機200の位置を回転双曲面W2と走行面と交わる交線として特定する。以降、同様の動作を繰り返すことにより、制御部50は、車載機200が測位用信号を送信する都度、測位用信号を受信して、車載機200の位置を精度良く特定し続けることができる。なお、この場合、走行面の幅は車線幅(複数車線の場合は道路幅)に相当するが、車両は車線のほぼ中央を走行すると考えられるので、走行面の幅方向の誤差は許容できる範囲内である。
【0055】
これにより、2つの通信部を設置することで車載機200の位置を高精度に特定することができる。また、道路形状情報に加えて、車載機200の高さ情報を考慮することにより、さらに精度よく車載機200の位置を特定することができる。
【0056】
実施の形態3
上述の実施の形態1、2の位置特定装置又は位置特定システムにおいて、車載機200自体にGPS等による自律的な自車両存在位置計測機能を備える構成とすることもできる。この場合、車載機200は、近隣を走行する他の車両の車載機との間で、自律的に計測した自車両存在位置を情報交換し合うようにすることができる。車載機200相互間で、お互いの位置情報を送受信しあうことで、各車両の車載機200は、自車両の周囲にどれくらいの台数の車両が存在するのか、どの程度接近した位置にいるのか等の情報を把握することができ、運転者の安全運転を支援することが可能になる。
【0057】
このような装置又はシステムでは、各車両が自律的に認識している自車位置が、所定以上の誤差を有する場合がある。位置情報に所定以上の誤差があると、その位置情報を受信した他の車両が、実際にはある程度離隔しているのにすぐそばに存在すると勘違いする可能性があり、交通の安全性を高めるという目的にそぐわないことがある。そこで、実施の形態1、2において示した路側機100を配置する構成を採用することで、各車両の位置を路側機100で測位すると共に、車載機200が送受信している位置情報を路側機100が傍受し、路側機100が把握している車両の存在位置と車載機200自身が認識する存在位置とが所定以上の誤差を有する場合に、路側機100がその車載機200に対して警告情報を送ることができる。
【0058】
上述の警告情報には、例えば、路側機100が測位した車両の位置に関する情報や誤差がどの程度であったかを知ることのできる情報を含ませておき、車載機200自身の有する自律的な測位機能に問題があることを瞬時に把握できるようにしておくことが望ましい。さらに、自律的な測位機能に問題のある車両の周囲を走行する車両の車載機200に対しても警告情報を送り、車車間通信で送受信される特定の車両の位置情報に誤差があることを知らせることもできる。
【0059】
以上のように、本発明にあっては、路側機100による測位を、車両の自律的な測位機能の補完として活用することもできる。
【0060】
以上説明したように、本発明にあっては、通信部間の時刻ずれをリアルタイムで監視することができ、車載機が送信した所定の信号を各通信部で受信した際に、各通信部での受信時点を正確に求めることができる。このため、車載機から送信する所定の信号に送信時点に関する情報を含めることなく、通信部間の到達時間差を精度よく算出することができ、車載機の位置を精度よく特定することができる。
【0061】
上述の実施の形態では、路側機100に各通信部10〜40を含む構成であったが、各通信部10〜40を別個の通信装置として構成することもできる。また、路側機100の制御部50、時刻ずれ算出部51、時刻補正部52、到達時間差算出部53、位置特定部54、記憶部55を基準の通信部10内に構成することもできる。また、位置特定装置としての路側機は一例であり、信号制御機などの他の装置として実現することもできる。
【0062】
上述の実施の形態において、路側機100で車載機200の位置を特定した場合、特定した位置を元の車載機200へ送信する構成とすることもできる。また、多数の車載機200が存在するときでも、車載機IDにより、どの車載機200へ特定した位置を送信すればよいかが分かる。この場合、本発明を用いることにより、例えば、車載機200で前方の信号機の表示情報を受信し、受信した表示情報に基づいて交差点の手前で安全に停止することができるか否か、あるいは、交差点を安全に通過することができるか否かを高精度に判定し、判定結果に応じて運転者に音声で注意を促すことができる。また、車載機200で受信した信号機の表示情報に基づいて、交差点を安全に通過することができるか否かを高精度に判定し、判定結果に応じて車両のブレーキ制御を行うこともでき、交通事故を未然に防止して交通の安全性を高めることができる。
【0063】
上述の実施の形態では、時刻ずれを算出し、時刻ずれを補正する構成であったが、これに限定されるものではなく、計時手段としては時計の他に、タイマ又はカウンタ等で構成することもでき、これらの計数値のずれを算出し、計数値ずれを補正する構成とすることもできる。すなわち、時刻ずれには、これらの計数値のずれも含む。
【0064】
上述の実施の形態では、端末装置として車載機を例に挙げて説明したが、端末装置は車載機に限定されるものではなく、歩行者等の移動する人が携帯する携帯通信装置(例えば、携帯電話、通信機能を有するPDA又は音楽・動画再生装置、ノート型パーソナルコンピュータ等)であってもよい。
【0065】
開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0066】
【図1】本発明に係る位置特定装置としての路側機の構成の一例を示すブロック図である。
【図2】各通信部の設置の一例を示す模式図である。
【図3】時刻補正用信号に含まれるデータ構造の例を示す説明図である。
【図4】時刻補正用信号の受信時刻の算出例を示す説明図である。
【図5】車載機が測位用信号を送信する一例を示す模式図である。
【図6】測位用信号に含まれるデータ構造の例を示す説明図である。
【図7】車載機の位置を特定する方法の一例を示す模式図である。
【図8】路側機の設置例を示す模式図である。
【図9】路側機の時刻補正の処理手順を示すフローチャートである。
【図10】路側機の車載機の位置特定処理の処理手順を示すフローチャートである。
【図11】道路形状情報の構造を示す説明図である。
【図12】実施の形態2の車載機の位置を特定する例を示す説明図である。
【符号の説明】
【0067】
10 第1通信部
20 第2通信部
30 第3通信部
40 第4通信部
11、21、31、41 時計
50 制御部
51 時刻ずれ算出部
52 時刻補正部
53 到達時間差算出部
54 位置特定部
55 記憶部
100 路側機
200 車載機
【特許請求の範囲】
【請求項1】
離隔距離が既知の少なくとも2つの通信部を備え、端末装置が送信した所定の信号を各通信部で受信して該端末装置の位置を特定する位置特定装置であって、
各通信部は、
計時手段を備え、
一の通信部を除く他の通信部は、
送信時点を含む計時補正用信号を前記一の通信部へ送信するように構成してあり、
前記一の通信部は、
計時補正用信号を受信するように構成してあり、
受信した計時補正用信号の受信時点及び前記送信時点並びに通信部間の離隔距離に基づいて、他の通信部との間の時刻ずれを算出する時刻ずれ算出手段と、
端末装置が送信した所定の信号の各通信部での受信時点及び前記時刻ずれ算出手段で算出した時刻ずれに基づいて、前記所定の信号の通信部への到達時間の時間差を算出する時間差算出手段と、
該時間差算出手段で算出した時間差に基づいて端末装置の位置を特定する特定手段と
を備えることを特徴とする位置特定装置。
【請求項2】
前記時刻ずれ算出手段で算出した時刻ずれに応じて、各計時手段での計時を補正する補正手段を備え、
前記時間差算出手段は、
端末装置が送信した所定の信号の各通信部での受信時点及び前記補正手段で補正した計時に基づいて、前記信号の通信部への到達時間の時間差を算出するように構成してあることを特徴とする請求項1に記載の位置特定装置。
【請求項3】
前記所定の信号は、
端末装置の位置特定用の信号であることを示す情報及び端末装置固有の識別子を含むことを特徴とする請求項1又は請求項2に記載の位置特定装置。
【請求項4】
端末装置の位置を特定する領域の道路形状情報を記憶する記憶手段を備え、
前記特定手段は、
記憶した道路形状情報を用いて端末装置の位置を特定するように構成してあることを特徴とする請求項1乃至請求項3のいずれか1つに記載の位置特定装置。
【請求項5】
端末装置の位置の高さ情報を記憶する記憶手段を備え、
前記特定手段は、
記憶した高さ情報を用いて端末装置の位置を特定するように構成してあることを特徴とする請求項1乃至請求項4のいずれか1つに記載の位置特定装置。
【請求項6】
所定の信号を送信する端末装置と、請求項1乃至請求項5のいずれか1つに記載の位置特定装置とを備え、前記端末装置の位置を特定するように構成してあることを特徴とする位置特定システム。
【請求項1】
離隔距離が既知の少なくとも2つの通信部を備え、端末装置が送信した所定の信号を各通信部で受信して該端末装置の位置を特定する位置特定装置であって、
各通信部は、
計時手段を備え、
一の通信部を除く他の通信部は、
送信時点を含む計時補正用信号を前記一の通信部へ送信するように構成してあり、
前記一の通信部は、
計時補正用信号を受信するように構成してあり、
受信した計時補正用信号の受信時点及び前記送信時点並びに通信部間の離隔距離に基づいて、他の通信部との間の時刻ずれを算出する時刻ずれ算出手段と、
端末装置が送信した所定の信号の各通信部での受信時点及び前記時刻ずれ算出手段で算出した時刻ずれに基づいて、前記所定の信号の通信部への到達時間の時間差を算出する時間差算出手段と、
該時間差算出手段で算出した時間差に基づいて端末装置の位置を特定する特定手段と
を備えることを特徴とする位置特定装置。
【請求項2】
前記時刻ずれ算出手段で算出した時刻ずれに応じて、各計時手段での計時を補正する補正手段を備え、
前記時間差算出手段は、
端末装置が送信した所定の信号の各通信部での受信時点及び前記補正手段で補正した計時に基づいて、前記信号の通信部への到達時間の時間差を算出するように構成してあることを特徴とする請求項1に記載の位置特定装置。
【請求項3】
前記所定の信号は、
端末装置の位置特定用の信号であることを示す情報及び端末装置固有の識別子を含むことを特徴とする請求項1又は請求項2に記載の位置特定装置。
【請求項4】
端末装置の位置を特定する領域の道路形状情報を記憶する記憶手段を備え、
前記特定手段は、
記憶した道路形状情報を用いて端末装置の位置を特定するように構成してあることを特徴とする請求項1乃至請求項3のいずれか1つに記載の位置特定装置。
【請求項5】
端末装置の位置の高さ情報を記憶する記憶手段を備え、
前記特定手段は、
記憶した高さ情報を用いて端末装置の位置を特定するように構成してあることを特徴とする請求項1乃至請求項4のいずれか1つに記載の位置特定装置。
【請求項6】
所定の信号を送信する端末装置と、請求項1乃至請求項5のいずれか1つに記載の位置特定装置とを備え、前記端末装置の位置を特定するように構成してあることを特徴とする位置特定システム。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2009−174964(P2009−174964A)
【公開日】平成21年8月6日(2009.8.6)
【国際特許分類】
【出願番号】特願2008−13028(P2008−13028)
【出願日】平成20年1月23日(2008.1.23)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成21年8月6日(2009.8.6)
【国際特許分類】
【出願日】平成20年1月23日(2008.1.23)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]