
位置算出方法及び位置算出装置
【課題】人間用搬送機器の搬送路にユーザーが乗った際のユーザーの位置を正しく求めるための新たな手法を提案すること。
【解決手段】位置算出システム1において、ナビゲーション装置2は、動く歩道の乗り口位置に設置された乗り口発信器3からの発信信号を受信することで、ユーザーが動く歩道に乗ったことを検出する。そして、乗り口発信器3から受信した動く歩道の搬送速度を積分し、歩行検出処理によってユーザーの一歩が検出されない場合には搬送速度を積分して得られる歩道の移動距離を用いて、ユーザーの一歩が検出された場合は搬送速度を積分して得られる歩道の移動距離及びユーザーの一歩の歩幅を用いて、動く歩道の搬送路上におけるユーザーの移動距離を算出する。
【解決手段】位置算出システム1において、ナビゲーション装置2は、動く歩道の乗り口位置に設置された乗り口発信器3からの発信信号を受信することで、ユーザーが動く歩道に乗ったことを検出する。そして、乗り口発信器3から受信した動く歩道の搬送速度を積分し、歩行検出処理によってユーザーの一歩が検出されない場合には搬送速度を積分して得られる歩道の移動距離を用いて、ユーザーの一歩が検出された場合は搬送速度を積分して得られる歩道の移動距離及びユーザーの一歩の歩幅を用いて、動く歩道の搬送路上におけるユーザーの移動距離を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、位置算出方法及び位置算出装置に関する。
【背景技術】
【0002】
加速度センサーやジャイロセンサーなどの慣性センサーの検出結果に基づいてユーザーの歩行検出を行って、ユーザーの位置を算出する技術が考案されている。ユーザーの歩行(一歩)を検出する手法としては、加速度センサーにより検出された上下動の加速度の時間変化におけるピークを検出するものが知られている(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平9−152355号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
慣性センサーを利用した従来の位置算出方法では、位置算出装置を持ったユーザーが動く歩道やエスカレーターなどの人間用搬送機器の搬送路に乗っている際には、ユーザーの位置を正確に求めることができないという問題がある。搬送路上でユーザーが静止している場合には、通常は加速度のピークが検出されないため、ユーザーは静止しているものと判定される。しかし、搬送路の移動によって実際にはユーザーの位置は変動する。一方で、搬送路上でユーザーが歩行している場合には、加速度のピークを検出することでユーザーの歩行は検出できる。しかし、搬送路の移動成分を検出することはできないため、算出される位置はユーザーの正確な位置とはならない。
【0005】
例えば、子供や老人などのユーザーに位置算出装置を持たせて管理側でユーザーの位置を管理したい場合や、ユーザーが自身の歩行ルートを位置算出装置に計測・記録させておいて後から利用したい場合などの利用状況を想定すると、ユーザーが人間用搬送機器の搬送路に乗っている際の時間がたとえ僅かな時間であったとしても、その際のユーザーの位置を正しく求めたいという要望がある。
【0006】
本発明は上述した課題に鑑みて為されたものであり、その目的とするところは、人間用搬送機器の搬送路にユーザーが乗った際のユーザーの位置を正しく求めるための新たな手法を提案することにある。
【課題を解決するための手段】
【0007】
以上の課題を解決するための第1の形態は、乗り口から降り口に至る搬送路上において歩行可能に人間を搬送する人間用搬送機器の前記搬送路にユーザーが乗った際のユーザーの位置を算出する位置算出方法であって、前記人間用搬送機器の搬送速度を積分することと、前記ユーザーの一歩を検出することと、前記ユーザーの一歩が検出されない場合には前記積分の結果を用いて、一歩が検出された場合には前記積分の結果及び前記一歩の歩幅を用いて、前記搬送路上における前記ユーザーの移動距離を算出することと、少なくとも前記乗り口の位置と前記移動距離とを用いて前記ユーザーの位置を算出することと、を含む位置算出方法である。
【0008】
また、他の形態として、ユーザーの位置を算出する位置算出装置であって、乗り口から降り口に至る搬送路上において歩行可能に人間を搬送する人間用搬送機器の前記搬送路にユーザーが乗ったことを検出する検出部と、前記人間用搬送機器の搬送速度を積分する積分部と、前記ユーザーの一歩を検出する歩行検出部と、前記歩行判定部による一歩の検出がなされない場合には前記積分部の積分結果を用いて、一歩の検出がなされた場合には前記積分部の積分結果及び前記一歩の歩幅を用いて、前記搬送路上における前記ユーザーの移動距離を算出する移動距離算出部と、前記検出部による検出がなされた場合に、少なくとも前記乗り口の位置と前記移動距離算出部により算出された移動距離とを用いて前記ユーザーの前記搬送路上の位置を算出する位置算出部と、を備えた位置算出装置を構成してもよい。
【0009】
この第1の形態等によれば、人間用搬送機器の搬送速度を積分し、ユーザーの一歩が検出されない場合には積分の結果を用いて、一歩が検出された場合には積分の結果及び一歩の歩幅を用いて、搬送路上におけるユーザーの移動距離を算出する。そして、少なくとも乗り口の位置と移動距離とを用いてユーザーの位置を算出する。
【0010】
ユーザーの一歩が検出されない場合は、ユーザーが搬送路上で静止していることが想定されるため、搬送機器の搬送速度を積分した結果を用いて移動距離を算出することが適切である。他方、ユーザーの一歩が検出された場合は、ユーザーが搬送路上で歩行していることが想定されるため、搬送機器の搬送速度を積分した結果に加えて、ユーザーの一歩の歩幅も用いて移動距離を算出することが適切である。搬送路の乗り口の位置は定まっているため、搬送路上のユーザーの移動距離が適切に求まれば、搬送路上におけるユーザーの位置も正確に求まる。
【0011】
また、第2の形態として、第1の形態の位置算出方法であって、前記乗り口には、前記乗り口の位置、前記搬送速度、及び、搬送方向を少なくとも含む搬送情報を発信する発信器が設置されており、前記搬送情報を受信することを更に含み、前記積分することは、前記受信した搬送情報に含まれる搬送速度を積分することであり、前記位置を算出することは、前記受信した搬送情報に含まれる乗り口の位置及び搬送方向と、前記移動距離とを用いて前記ユーザーの位置を算出することである、位置算出方法を構成してもよい。
【0012】
この第2の形態によれば、搬送路の乗り口の位置、搬送速度、及び、搬送方向を少なくとも含む搬送情報を搬送路の乗り口に設置された発信器から受信する。そして、受信した搬送情報に含まれる搬送速度を積分し、受信した搬送情報に含まれる乗り口の位置及び搬送方向と、算出した移動距離とを用いてユーザーの位置を算出する。搬送路に関する搬送情報を発信器から取得することで、搬送路上におけるユーザーの位置算出に供することができる。
【0013】
また、第3の形態として、第2の形態の位置算出方法であって、前記発信器は、前記搬送路の長さを前記搬送情報に更に含めて発信しており、前記移動距離が前記受信した搬送情報に含まれる前記搬送路の長さに達した場合に、前記ユーザーが前記搬送路から降りたことを検出することを更に含む、位置算出方法を構成してもよい。
【0014】
この第3の形態によれば、発信器から受信した搬送情報に含まれる搬送路の長さに移動距離が達するか否かを判定するといった簡易な判定方法により、ユーザーが搬送路から降りたことを検出することができる。
【0015】
また、第4の形態として、第1〜第3の何れかの形態の位置算出方法であって、前記降り口には、降り口に到来した旨の降り口情報を発信する降り口発信器が設置されており、前記降り口情報を受信した場合に、前記ユーザーが前記搬送路から降りたことを検出することを更に含む、位置算出方法を構成してもよい。
【0016】
この第4の形態によれば、降り口発信器から降り口情報を受信するといった簡易な判定方法により、ユーザーが搬送路から降りたことを検出することができる。
【0017】
また、第5の形態として、第1の形態の位置算出方法であって、前記搬送路上に位置するか否かに関わらず、所定の測位演算を行って前記ユーザーの位置を算定することと、乗り口の位置、搬送速度及び搬送方向を少なくとも含む搬送情報を人間用搬送機器毎に記憶した記憶部から、前記ユーザーが乗った前記人間用搬送機器の搬送情報を前記算定された位置に基づいて読み出すことと、を更に含み、前記積分することは、前記読み出した搬送情報に含まれる搬送速度を積分することであり、前記位置を算出することは、前記読み出した搬送情報に含まれる乗り口の位置及び搬送方向と、前記移動距離とを用いて前記ユーザーの位置を算出することである、位置算出方法を構成してもよい。
【0018】
この第5の形態によれば、搬送情報を人間用搬送機器毎に記憶した記憶部から、ユーザーが乗った人間用搬送機器の搬送情報を、測位演算によって算定した位置に基づいて読み出す。そして、読み出した搬送情報に含まれる搬送速度を積分し、読み出した搬送情報に含まれる乗り口の位置及び搬送方向と、算出した移動距離とを用いて、ユーザーの位置を算出する。搬送情報を人間用搬送機器毎に記憶部に記憶させておけばよいため、例えば第2の形態のように、搬送情報を発信する発信器を搬送路の乗り口に設置する必要がない。
【0019】
また、第6の形態として、第1〜第5の何れかの形態の位置算出方法であって、前記人間用搬送機器は、動く歩道又はエスカレーターである、位置算出方法を構成してもよい。
【図面の簡単な説明】
【0020】
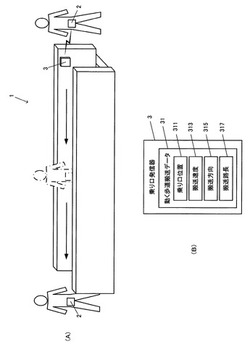
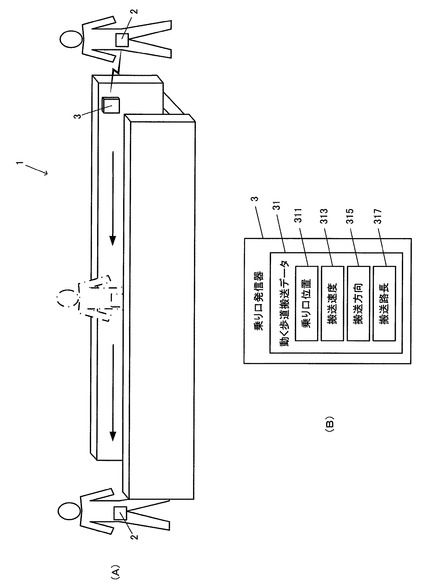
【図1】(A)は位置算出システムの概略図。(B)は乗り口発信器の構成図。
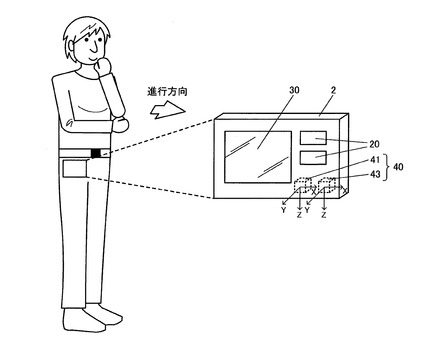
【図2】ナビゲーション装置をユーザーが装着した状態を示す図。
【図3】歩数検出の原理の説明図。
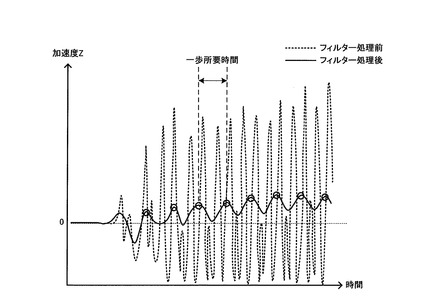
【図4】Z軸の加速度の計測結果の一例を示す図。
【図5】ナビゲーション装置の機能構成の一例を示すブロック図。
【図6】センサーデータのデータ構成の一例を示す図。
【図7】移動軌跡データのデータ構成の一例を示す図。
【図8】位置算出処理の流れを示すフローチャート。
【図9】歩行検出処理の流れを示すフローチャート。
【図10】動く歩道通過時処理の流れを示すフローチャート。
【図11】(A)は変形例における位置算出システムの概略図。(B)は変形例における乗り口発信器の構成図。(C)は変形例における降り口発信器の構成図。
【図12】人間用搬送機器データベースの構成図。
【図13】搬送路の乗降検出の説明図。
【発明を実施するための形態】
【0021】
以下、図面を参照して、ナビゲーション装置を装着した歩行者であるユーザーの位置を算出するシステムである位置算出システムの実施形態について説明する。但し、本発明を適用可能な実施形態が以下説明する実施形態に限定されるわけではない。
【0022】
1.システム構成
図1は、本実施形態における位置算出システム1のシステム構成を説明するための図である。位置算出システム1は、図1(A)に示すように、着脱式のナビゲーション装置2と、人間用搬送機器の一種である動く歩道と、当該動く歩道の乗り口位置に設置された乗り口発信器3とを備えて構成され、ナビゲーション装置2を装着したユーザーの位置を算出するシステムである。
【0023】
図2は、ナビゲーション装置2をユーザーが装着した様子及びナビゲーション装置2の概略構成の説明図である。ナビゲーション装置2は、操作部20からの指示操作に従って、ユーザーの位置算出を行ってナビゲーションを行う機能を有する電子機器であり、図2に示すように、例えばユーザーの右腰に装着されて使用される。
【0024】
ナビゲーション装置2は、加速度センサー41及びジャイロセンサー43を有するセンサー部40を具備している。そして、加速度センサー41により検出された加速度に基づいてユーザーの一歩(歩行)を検出する。また、ジャイロセンサー43により検出された角速度に基づいてユーザーの移動方向を推測する。そして、一歩を検出する毎に歩幅を加算して歩行距離を算出するとともに、推測した移動方向に基づいてユーザーの位置を算出する。そして、算出した位置をプロットしたナビゲーション画面を生成して、表示部30に表示させる。
【0025】
加速度センサー41は、直交3軸の加速度を検出するセンサーであり、歪みゲージ式や圧電式の何れであってもよく、またMEMS(Micro Electro Mechanical Systems)センサーであってもよい。また、ジャイロセンサー43は、直交3軸の角速度を検出するセンサーであり、加速度センサー41と軸方向が同一となるように配置設定されている。尚、図2では、加速度センサー41とジャイロセンサー43とを独立したセンサーとして図示しているが、加速度センサー41とジャイロセンサー43とは一体型のセンサーであってもよい。
【0026】
本実施形態では、ユーザーから見て前後方向の前方向を「X軸の正方向」、左右方向の右方向を「Y軸の正方向」、上下方向(鉛直方向)の下方向を「Z軸の正方向」とする直交3軸の座標系として説明する。また、説明を分かり易くするために、加速度センサー41及びジャイロセンサー43の検出軸の軸方向及び各軸の正方向を、X軸,Y軸,Z軸の軸方向及び正方向と同じとして説明する。但し、実際には異なっていてもよいのは勿論である。加速度センサー41及びジャイロセンサー43の検出軸とX軸,Y軸,Z軸の軸方向とは、相対的な関係でユーザーに固定されるため、公知の行列計算によって、加速度センサー41及びジャイロセンサー43の検出結果からX,Y,Zそれぞれの値を算出することができる。
【0027】
動く歩道は、踏み面である搬送路が移動することで人間を搬送する人間用搬送機器の一種であり、大規模な駅構内や空港内、ショッピングモールなどに設置されている。歩行者であるユーザーは、乗り口から搬送路に乗って移動し、降り口で搬送路から降りる。搬送路上では、ユーザーは静止していることもできるし、歩行することもできる。
【0028】
乗り口発信器3は、ユーザーが動く歩道の乗り口に到来したことをナビゲーション装置2に通知することを目的として乗り口位置に設置される発信装置であり、いわばナビゲーション装置2の位置算出を支援する支援装置(支援システム)とも言える。
【0029】
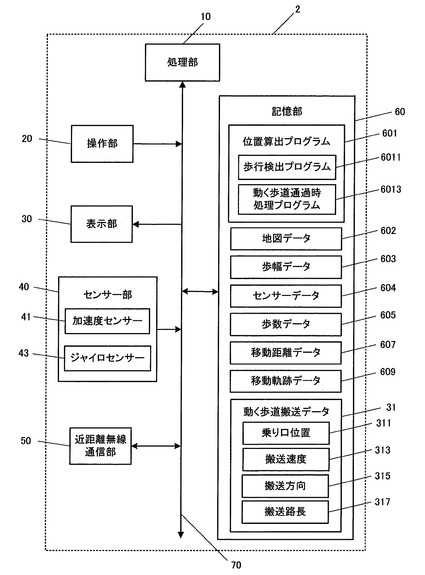
乗り口発信器3は、図1(B)に示すように、動く歩道の搬送情報を記憶した動く歩道搬送データ31を記憶している。動く歩道搬送データ31には、例えば、動く歩道の乗り口位置の位置座標である乗り口位置311と、動く歩道の搬送路の速度である搬送速度313と、動く歩道の搬送路が移動する方向である搬送方向315と、動く歩道の乗り口位置から降り口位置までの長さである搬送路長317とが含まれる。
【0030】
乗り口発信器3は、動く歩道搬送データ31を発信信号に含めて、所定の近距離無線方式で発信する。発信信号の信号強度等は、発信信号の到達範囲が規定の距離となるように予め設計されている。ユーザーが動く歩道の乗り口に到来し、動く歩道に進入しようとしていることをユーザーに通知することが目的であるため、発信信号の到達範囲は乗り口位置近傍の範囲(例えば乗り口発信器3の設置位置を中心として半径1m以内)とすることが適切である。なお、所定の指向性アンテナを利用して動く歩道の進入通路内に電波を発信する構成としてもよい。
【0031】
ナビゲーション装置2を装着したユーザーが動く歩道の乗り口位置に接近すると、ナビゲーション装置2は乗り口発信器3から発信信号を受信する。すると、ナビゲーション装置2は、ユーザーが動く歩道の搬送路に乗ったことを検出する。そして、受信した発信信号に含まれる動く歩道搬送データ31を用いた位置算出処理を行うことによって、動く歩道上におけるユーザーの正確な位置算出を実現する。
【0032】
2.原理
2−1.一歩の検出の原理
最初に、ユーザーの一歩の検出の原理について説明する。一歩の検出は、加速度センサー41により検出された直交3軸の加速度のうち、ユーザーの上下動の加速度であるZ軸の加速度に基づいて行う。具体的には、Z軸の加速度の時系列変化において、加速度がピーク(極大値)となった時刻においてユーザーにより一歩が踏み出されたものと判定し、一歩とカウントする。
【0033】
しかしながら、加速度センサー41により検出されるZ軸の加速度には高周波のノイズ成分が含まれ得る。そのため、一歩であると思って検出した加速度のピークが“真の”ピークではなく、単なるノイズ成分である“偽の”ピークである場合があり、歩数のミスカウントに繋がる場合がある。
【0034】
上述したZ軸の加速度に含まれるノイズは高周波の成分である。そこで、本実施形態では、Z軸の加速度に対してフィルター処理を行うことで、加速度センサー41により検出されるZ軸の加速度の低周波成分を抽出する。
【0035】
具体的には、歩行時の1歩1歩の周波数(1秒当たりの歩数)は、高く見積もっても5[Hz]程度であり、10[Hz]となることはないと言える。そのため、数[Hz]をカットオフ周波数(所定の閾値周波数)として、それよりも高い周波数成分をカットすることで、加速度の低周波成分、すなわち歩行時の加速度の成分を抽出する。そして、抽出した低周波成分の加速度のピークを検出して一歩と判定する。
【0036】
図3は、Z軸の加速度の生のデータと、Z軸の加速度に対してフィルター処理を施した後のデータとを対比したグラフである。図3において、横軸は時間を示しており、縦軸はフィルター処理を施す前と施した後とのそれぞれにおけるZ軸の加速度を示している。また、フィルター処理を施す前の加速度を波線で、フィルター処理を施した後の加速度を実線で示している。
【0037】
この図を見ると、フィルター処理を施す前においては、Z軸の加速度は高周波成分を含んでおり、上下方向に大きな振幅で細かく振動していることがわかる。一方、フィルター処理を施した後においては、Z軸の加速度から高周波成分が除去されて、加速度が平滑化されていることがわかる。フィルター処理後の加速度の時系列変化において、○印で囲んで示した部分が、加速度の大きさがピーク(極大値)となった部分であり、一歩が踏み出された部分である。以下では、隣接する加速度のピーク間の時間のことを「一歩所要時間」として説明する。
【0038】
2−2.歩行方向推測の原理
次に、ユーザーの歩行方向推測の原理について説明する。本実施形態では、ジャイロセンサー43により検出された上下方向(Z軸)の軸回りの角速度に基づいてユーザーの歩行方向を推測する。すなわち、Z軸はヨー軸に相当するため、ヨー軸の軸回りの角速度に基づいて歩行方向を推測する。
【0039】
具体的には、ジャイロセンサー43により検出された角速度に対してフィルター処理を行うことで、角速度を平滑化する。そして、平滑化されたZ軸(ヨー軸)の軸回りの角速度に対して積分処理を行ってユーザーの移動方向を推測する。本実施形態では、ジャイロセンサー43の検出軸の軸方向及び各軸の正方向をX軸,Y軸,Z軸の軸方向及び正方向と同じとしているため、Z軸の軸回りの角速度を積分することで、XY平面におけるユーザーの移動方向を求めることができる。
【0040】
2−3.動く歩道通過時の処理
次に、ユーザーの動く歩道通過時における位置算出の原理について説明する。ユーザーが動く歩道の搬送路に乗っている際には、一歩が踏み出される毎に歩幅を加算していく方法では、ユーザーの正確な位置を求めることができない。なぜなら、ユーザーが乗っている搬送路の移動を考慮していないためである。
【0041】
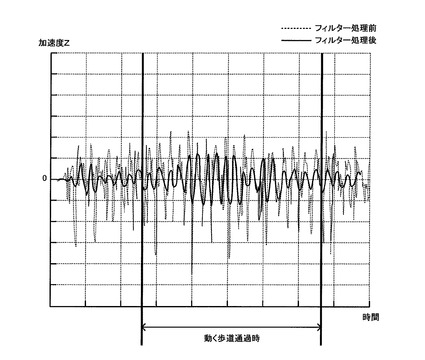
本願発明者は、ナビゲーション装置2を被験者に装着させ、実際に動く歩道の搬送路上を歩行させる実験を行った。動く歩道の搬送路長は約20mであり、搬送速度は約0.65m/sであった。動く歩道の手前から被験者に歩行を開始させて、一定の歩行速度を保ったまま搬送路に進入させ、搬送路に乗った後も同じ歩行速度で歩行を継続させた。
【0042】
この実験の結果、被験者が搬送路に乗っていた時間は約10秒であり、計測された移動距離は13.5mであった。動く歩道の搬送路長は約20mであるため、計測された移動距離には約6.5mの誤差が含まれていることになる。この6.5mという長さは、動く歩道の搬送速度でちょうど10秒間進んだ距離に相当する。
【0043】
参考として、この実験において計測されたZ軸の加速度の時間変化のグラフを図4に示す。グラフの見方は図3と同じであり、2本の太実線で囲まれる部分が、被験者の動く歩道通過時に検出された加速度を示している。このグラフを見ると、ユーザーが動く歩道を通過している際には、通常時に検出される加速度よりも振幅が大きくなっており、通常時とは異なる特性を示していることがわかる。
【0044】
上記の実験結果を考慮して、本実施形態では、搬送路にユーザーが乗っている際のユーザーの位置を正しく求めるため、ユーザーが乗り口位置に到来した際に乗り口発信器3から動く歩道搬送データ31を受信する。そして、受信した動く歩道搬送データ31を用いた位置算出処理を行う。具体的には、通常時における歩行検出は継続しつつ、受信した動く歩道搬送データ31に含まれている搬送速度313を積分することで搬送路の移動距離を算出する。
【0045】
歩行検出によって一歩が検出されなかった場合は、搬送路上でユーザーが静止していることが想定されるため、搬送路の移動距離をユーザーの移動距離とする。一方、歩行検出によって一歩が検出された場合は、搬送路上でユーザーが歩行していることが想定されるため、搬送路の移動距離にユーザーの歩行距離を加算した距離をユーザーの移動距離とする。また、搬送路上におけるユーザーの移動方向は、乗り口発信器3から取得した動く歩道搬送データ31に含まれている搬送方向315と同じである。このようにして搬送路上におけるユーザーの移動距離及び移動方向が求まるため、搬送路上におけるユーザーの位置も正しく求めることができる。
【0046】
また、本実施形態では、ユーザーが搬送路に乗ったことを検出した場合に、乗り口発信器3から受信した動く歩道搬送データ31に含まれている乗り口位置311で、ナビゲーション画面に出力する出力位置をリセットする。そして、乗り口位置を基準として移動距離を算出し、乗り口発信器3から受信した動く歩道搬送データ31に含まれている搬送路長317に移動距離が達した場合に、ユーザーが動く歩道の搬送路から降りたものと判定する。
【0047】
3.機能構成
図5は、ナビゲーション装置2の機能構成を示すブロック図である。ナビゲーション装置2は、処理部10と、操作部20と、表示部30と、センサー部40と、近距離無線通信部50と、記憶部60とを備え、各部がバス70で接続されたコンピューターシステムである。
【0048】
処理部10は、記憶部60に記憶されているシステムプログラム等の各種プログラムに従ってナビゲーション装置2の各部を統括的に制御する機能部であり、例えばCPU(Central Processing Unit)等のプロセッサーにより実現される。本実施形態では、処理部10は、記憶部60に記憶されている位置算出プログラム601に従って歩行者であるユーザーの位置を算出・決定し、出力位置をプロットしたナビゲーション画面を生成して表示部30に表示させる。
【0049】
操作部20は、例えばタッチパネルやボタンスイッチ等により構成される入力装置であり、押下されたキーやボタンの信号を処理部10に出力する。この操作部20の操作により、位置算出の開始指示操作や、リセット指示操作、電源切断指示操作等の各種指示入力がなされる。
【0050】
表示部30は、LCD(Liquid Crystal Display)等により構成され、処理部10から入力される表示信号に基づいた各種表示を行う表示装置である。表示部30には、ユーザーの移動軌跡や時刻情報等が表示される。
【0051】
センサー部40は、ユーザーの歩行状態を検出するためのセンサーを有する機能部であり、例えば加速度センサー41とジャイロセンサー43とを備えて構成される。加速度センサー41及びジャイロセンサー43の検出結果は、処理部10に随時出力される。
【0052】
近距離無線通信部50は、ナビゲーション装置2が乗り口発信器3等の外部機器と近距離の無線通信を行うための通信装置である。この機能は、例えば、Bluetooth(登録商標)やZigBee(登録商標)といった公知の近距離無線方式の技術を用いて実現される。
【0053】
記憶部60は、例えばROM(Read Only Memory)やフラッシュROM、RAM(Random Access Memory)等のメモリを備えた記憶装置であり、処理部10がナビゲーション装置2を制御するためのシステムプログラムや、位置算出機能を実現するための各種プログラムやデータ等を記憶している。また、処理部10により実行されるシステムプログラム、各種処理プログラム、各種処理の処理中データ、処理結果などを一時的に記憶するワークエリアを形成している。
【0054】
4.データ構成
図5に示すように、記憶部60には、プログラムとして、処理部10により読み出され、位置算出処理(図8参照)として実行される位置算出プログラム601が記憶されている。位置算出プログラム601は、歩行検出処理(図9参照)として実行される歩行検出プログラム6011と、動く歩道通過時処理(図10参照)として実行される動く歩道通過時処理プログラム6013とをサブルーチンとして有している。
【0055】
位置算出処理とは、処理部10が、加速度センサー41の検出結果に基づいて歩行検出を行うとともに、ユーザーが動く歩道の搬送路に乗ったことを検出した場合に、乗り口発信器3から受信した動く歩道搬送データ31を用いた位置算出処理を行って、ユーザーの位置を算出する処理である。位置算出処理については、フローチャートを用いて詳細に後述する。
【0056】
また、記憶部60には、データとして、地図データ602と、歩幅データ603と、センサーデータ604と、歩数データ605と、移動距離データ607と、移動軌跡データ609と、動く歩道搬送データ31とが記憶される。
【0057】
地図データ602は、位置算出処理により算出・決定した出力位置をプロットしたナビゲーション画面を生成するための地図情報が記憶されたデータである。
【0058】
歩幅データ603は、ユーザーの歩幅が設定されたデータである。歩幅の設定は、例えば固定値を設定することとしてもよいし、ユーザーの身長等の身体的特徴に基づいて設定することとしてもよい。
【0059】
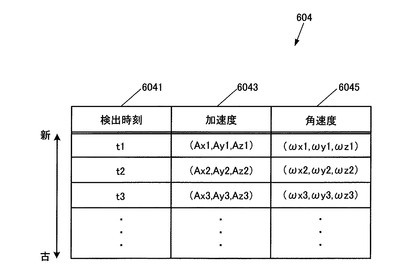
センサーデータ604は、センサー部40の検出結果のデータであり、そのデータ構成例を図6に示す。センサーデータ604には、センサー部40の検出時刻6041(例えばミリ秒単位の時刻であり、その時間間隔は移動軌跡データ609の出力時刻6091の時間間隔より十分に短い。)と、加速度センサー41により検出された3軸の加速度6043と、ジャイロセンサー43により検出された3軸の軸回りの角速度6045とが対応付けて記憶される。
【0060】
歩数データ605は、フィルター処理後のZ軸の加速度のピークを計測することでカウントされるユーザーの歩数のデータである。また、移動距離データ607は、動く歩道の入口位置を基準として算出されるユーザーの移動距離のデータである。
【0061】
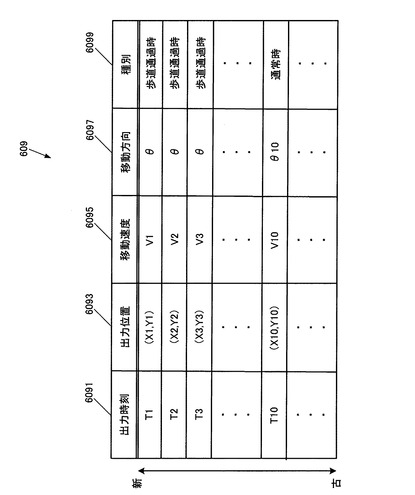
移動軌跡データ609は、ユーザーの移動軌跡のデータであり、そのデータ構成例を図7に示す。移動軌跡データ609には、出力時刻6091と、出力位置6093と、移動速度6095と、移動方向6097と、種別6099とが対応付けて記憶される。
【0062】
種別6099は、出力位置6093、移動速度6095及び移動方向6097が、動く歩道通過時に算出されたものと、通常時に算出されたものとの何れであるかを示すフラグであり、前者の場合は「歩道通過時」、後者の場合は「通常時」がそれぞれ記憶される。
【0063】
動く歩道通過時には、ユーザーの歩行速度と動く歩道の搬送速度とを合算した速度が移動速度6095となる。ユーザーの歩行速度は、一歩所要時間と一歩の歩幅とから算出することができる。また、動く歩道通過時におけるユーザーの移動方向6097は、動く歩道の搬送方向θと等しい。
【0064】
動く歩道搬送データ31は、近距離無線通信部50が乗り口発信器3から受信することで取得される動く歩道の搬送情報が格納されたデータである。
【0065】
5.処理の流れ
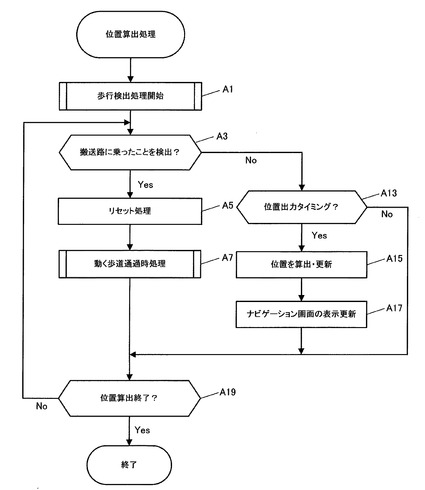
図8は、記憶部60に記憶されている位置算出プログラム601が処理部10により読み出されて実行されることで、ナビゲーション装置2において実行される位置算出処理の流れを示すフローチャートである。
【0066】
位置算出処理は、処理部10が、操作部20を介してユーザーにより電源投入操作がなされたことを検出した場合に実行を開始する処理である。以下の位置算出処理においては、センサー部40の検出結果が、記憶部60のセンサーデータ604に随時格納されるものとして説明する。
【0067】
先ず、処理部10は、記憶部60に記憶されている歩行検出プログラム6011を読み出して実行することで、歩行検出処理を開始する(ステップA1)。以後、位置算出処理が終了するまで、歩行検出処理は常時実行される。
【0068】
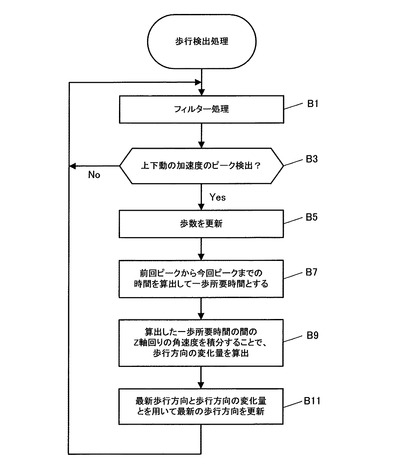
図9は、歩行検出処理の流れを示すフローチャートである。
先ず、処理部10は、加速度センサー41及びジャイロセンサー43の各軸の出力値に対するフィルター処理を実行する(ステップB1)。すなわち、加速度センサー41及びジャイロセンサー43の各軸の出力値から高周波成分を除去する処理を行う。
【0069】
次いで、処理部10は、フィルター処理が施された後の上下動(Z軸)の加速度からピークを検出したか否かを判定し(ステップB3)、ピークが検出されなかった場合は(ステップB3;No)、ステップB1に戻る。また、ピークを検出した場合は(ステップB3;Yes)、処理部10は、一歩と判定して、記憶部60の歩数データ605を更新する(ステップB5)。
【0070】
次いで、処理部10は、フィルター処理後のZ軸の加速度の前回ピークから今回ピークまでの時間を算出して、一歩所要時間とする(ステップB7)。そして、処理部10は、算出した一歩所要時間の間のフィルター処理後のZ軸回りの角速度を積分することで、当該一歩所要時間における歩行方向の変化量を算出する(ステップB9)。
【0071】
その後、処理部10は、記憶部60の移動軌跡データ609に記憶されている最新の移動方向6097と、ステップB9で算出した歩行方向の変化量とを用いて、ユーザーの最新の歩行方向を更新する(ステップB11)。これら一連の処理を行った後、処理部10は、ステップB1に戻る。
【0072】
図8の位置算出処理に戻って、歩行検出処理を開始すると、処理部10は、ユーザーが搬送路に乗ったか否かの検出を行う(ステップA3)。ユーザーが搬送路に乗ったか否かの検出は、近距離無線通信部50が乗り口発信器3から発信信号を受信したことを検出することにより行う。
【0073】
そして、搬送路に乗ったことを検出した場合は(ステップA3;Yes)、処理部10は、乗り口発信器3から受信した動く歩道搬送データ31に含まれる乗り口位置311で、移動軌跡データ609の最新の出力位置6093をリセットする処理を行う(ステップA5)。リセット処理を行った後、処理部10は、記憶部60に記憶されている動く歩道通過時処理プログラム6013に従って動く歩道通過時処理を実行する(ステップA7)。
【0074】
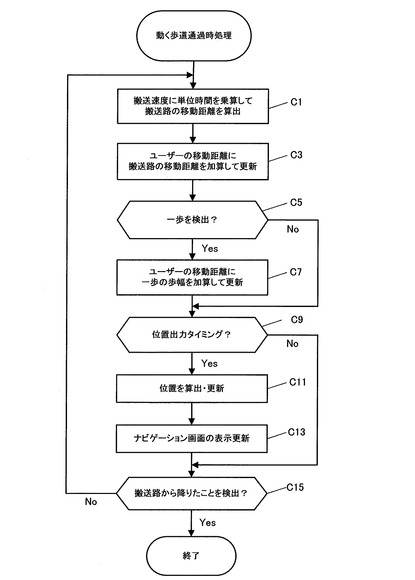
図10は、動く歩道通過時処理の流れを示すフローチャートである。
先ず、処理部10は、受信した搬送速度313に単位時間を乗算して、当該単位時間における搬送路の移動距離を算出する(ステップC1)。ここで単位時間とは、例えば位置の出力時間間隔の1/n倍(n>1)の時間として設定される時間である。例えば、位置の出力時間間隔が「1秒(1000ミリ秒)」で「n=100」とした場合は、単位時間として「10ミリ秒」を設定する。
【0075】
次いで、処理部10は、ステップC1で算出した搬送路の移動距離を、移動距離データ607に記憶されているユーザーの移動距離に加算して更新する(ステップC3)。そして、処理部10は、一歩を検出したか否かを判定する(ステップC5)。処理部10は歩行検出処理を並列して実行しており、その結果に基づいて一歩を検出する。
【0076】
一歩を検出しなかったと判定した場合は(ステップC5;No)、処理部10は、ステップC9へと処理を移行する。また、一歩を検出したと判定した場合は(ステップC5;Yes)、移動距離データ607に記憶されているユーザーの移動距離に一歩の歩幅を加算して更新する(ステップC7)。
【0077】
その後、処理部10は、位置出力タイミングであるか否かを判定し(ステップC9)、位置出力タイミングであると判定した場合は(ステップC9;Yes)、移動距離データ607に記憶されているユーザーの移動距離と、受信した搬送方向315とを用いて、ユーザーの位置を新たに算出し、移動軌跡データ609の出力位置6093を更新する(ステップC11)。
【0078】
そして、処理部10は、最新の出力位置6093で表示部30のナビゲーション画面の表示を更新した後(ステップC13)、或いはステップC9において位置出力タイミングではないと判定した場合に(ステップC9;No)、ユーザーが搬送路から降りたことの検出を行う(ステップC15)。具体的には、乗り口位置からのユーザーの移動距離が、受信した搬送路長317に達したか否かを判定する。
【0079】
処理部10は、動く歩道からの進出を検出するまでステップC1〜C13の処理を繰り返し実行し(ステップC15;No→C1)、動く歩道からの進出を検出した場合に(ステップC15;Yes)、動く歩道通過時処理を終了する。
【0080】
図8の位置算出処理に戻って、ステップA3において搬送路に乗ったことを検出しなかった場合は(ステップA3;No)、処理部10は、位置出力タイミングであるか否かを判定する(ステップA13)。
【0081】
そして、位置出力タイミングであると判定した場合は(ステップA13;Yes)、処理部10は、歩行検出処理で検出した歩数及び歩行方向と、歩幅データ603の歩幅とを用いて、ユーザーの位置を新たに算出し、移動軌跡データ609の出力位置6093を更新する(ステップA15)。そして、処理部10は、最新の出力位置6093で表示部30のナビゲーション画面の表示を更新する(ステップC17)。
【0082】
ステップA7又はA17の処理を行った後、又は、ステップA13において位置出力タイミングではないと判定した場合は(ステップA13;No)、処理部10は、位置算出を終了するか否かを判定する(ステップA19)。すなわち、操作部20を介して位置算出の終了指示操作がなされたか否かを判定する。
【0083】
そして、位置算出をまだ終了しないと判定した場合は(ステップA19;No)、処理部10は、ステップA3に戻り、位置算出を終了すると判定した場合は(ステップA19;Yes)、位置算出処理を終了する。
【0084】
6.作用効果
位置算出システム1において、ナビゲーション装置2は、動く歩道の乗り口位置に設置された乗り口発信器3からの発信信号を受信することで、ユーザーが動く歩道に乗ったことを検出する。そして、乗り口発信器3から受信した動く歩道の搬送速度を積分し、歩行検出処理によってユーザーの一歩が検出されない場合には搬送速度を積分して得られる歩道の移動距離を用いて、ユーザーの一歩が検出された場合は搬送速度を積分して得られる歩道の移動距離及びユーザーの一歩の歩幅を用いて、動く歩道の搬送路上におけるユーザーの移動距離を算出する。
【0085】
また、ナビゲーション装置2は、乗り口発信器3から受信した動く歩道の乗り口位置でナビゲーション画面に表示させる出力位置をリセットする。そして、乗り口位置を基準としてユーザーの移動距離を算出し、乗り口発信器3から受信した動く歩道の搬送方向を併せて用いて、ユーザーの位置を算出する。そして、乗り口位置を基準として算出した移動距離が、乗り口発信器3から受信した動く歩道の搬送路長に達した場合に、ユーザーが動く歩道から降りたことを検出する。
【0086】
上下動の加速度の検出結果を用いた歩行検出によってユーザーの一歩が検出されない場合は、ユーザーは動く歩道上で静止していることが想定されるため、動く歩道の搬送速度を積分した結果を用いて移動距離を算出することが適切である。他方、ユーザーの一歩が検出された場合は、ユーザーは動く歩道上で歩行していることが想定されるため、動く歩道の搬送速度を積分した結果に加えて、ユーザーの一歩の歩幅も用いて移動距離を算出することが適切である。その上で、動く歩道の乗り口位置を基準として移動距離を算出することで、動く歩道の搬送路上におけるユーザーの位置を正確に求めることが可能となる。
【0087】
7.変形例
7−1.電子機器
本発明は、ナビゲーション装置の他にも、位置算出装置を備えた電子機器であれば何れの電子機器にも適用可能である。例えば、歩数計や腕時計等についても同様に適用可能である。
【0088】
7−2.降り口発信器
上述した実施形態では、動く歩道の乗り口位置にのみ発信器を設置する場合について説明したが、動く歩道の乗り口位置ばかりでなく、動く歩道の降り口位置にも発信器を設置することとしてもよい。
【0089】
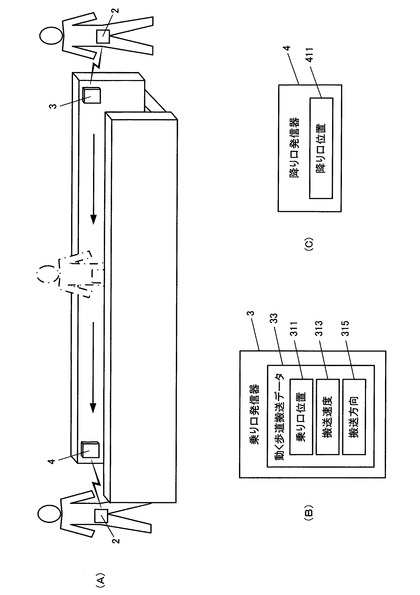
図11は、この場合における位置算出システムのシステム構成の概略を示す図である。図11(A)の位置算出システムでは、動く歩道の乗り口位置に乗り口発信器3が設置されているとともに、動く歩道の降り口位置に降り口発信器4が設置されている。
【0090】
乗り口発信器3は、図11(B)に示すように、乗り口位置311と、搬送速度313と、搬送方向315とを含む動く歩道搬送データ33を記憶している。上述した実施形態では、ユーザーが搬送路から降りたことを検出するために搬送路長317が必要であったが、ここでは不要であるため、動く歩道搬送データ33からは搬送路長317を除外している。図1(B)の動く歩道搬送データ31とはデータ構成が異なるため、図11(B)では符号を変えて動く歩道搬送データ33としている。
【0091】
降り口発信器4は、ユーザーが動く歩道の降り口に到来したことをナビゲーション装置2に通知することを目的として設置される発信装置である。降り口発信器4は、図11(C)に示すように、ユーザーが降り口に到来した旨の降り口情報として、降り口位置411(降り口位置の位置座標)を記憶している。そして、降り口位置411を発信信号に含めて発信する。
【0092】
ナビゲーション装置2を装着したユーザーが動く歩道の降り口に差し掛かると、ナビゲーション装置2は、降り口発信器4の発信信号を受信する。すると、ナビゲーション装置2は、ユーザーが搬送路から降りたことを検出し、実行中の動く歩道通過時処理を終了する。この場合には、乗り口発信器3と降り口発信器4とが位置算出支援システムとなる。
【0093】
7−3.人間用搬送機器
上述した実施形態では、動く歩道に本発明を適用した場合を例に挙げて説明したが、他の人間用輸送機器にも適用可能である。例えば、エスカレーターについても本発明を同様に適用可能である。
【0094】
この場合は、エスカレーターの乗り口位置に乗り口発信器を設置する。乗り口発信器には、エスカレーターの搬送情報を記憶させておく。但し、エスカレーターは傾斜しているため、搬送方向として、水平面におけるエスカレーターの搬送方向「θ」に加えて、エスカレーターの傾斜角度「φ」も記憶させておく。そして、これらの搬送情報を乗り口発信器に発信させる。
【0095】
ナビゲーション装置2は、乗り口発信器から信号を受信することで、歩行者がエスカレーターの搬送路に乗ったことを検出する。そして、上述した実施形態と同様に、乗り口発信器から取得したエスカレーターの搬送情報を用いて移動距離を算出する。この際、エスカレーターの傾斜角度「φ」も加味してユーザーの移動距離を算出する。
【0096】
なお、前述したように、エスカレーターの降り口位置に降り口発信器を配置し、降り口発信器から発信信号を受信することで、歩行者がエスカレーターの搬送路から降りたことを検出することとしてもよい。
【0097】
7−4.発信器を用いない構成
人間用搬送機器の乗り口位置や降り口位置に発信器を設置することなく、人間用搬送機器にユーザーが乗った際の位置算出を実現することも可能である。
【0098】
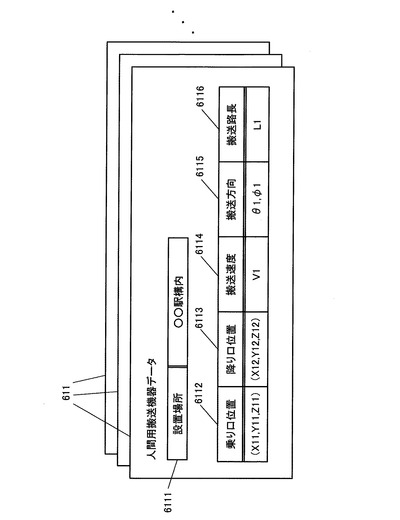
この場合は、人間用搬送機器毎の搬送情報を記憶したデータベースをナビゲーション装置2に記憶させておく。例えば、図12に示すように、人間用搬送機器が設置されている場所(駅や空港、ショッピングモールなど)と対応付けて、当該人間用搬送機器の搬送情報を記憶した人間用搬送機器データ611を蓄積したデータベースを生成する。図12の人間用搬送機器データ611では、人間用搬送機器の設置場所6111と対応付けて、乗り口位置6112と、降り口位置6113と、搬送速度6114と、搬送方向6115と、搬送路長6116が記憶されている。
【0099】
ナビゲーション装置2は、所定の測位演算を行ってユーザーの位置を算定する。例えば、GPS(Global Positioning System)に代表される衛星測位システムを利用した測位演算を行ってもよいし、上述した実施形態のように歩行検出処理の結果を用いて測位演算を行ってもよい。そして、ナビゲーション装置2は、測位演算により算定したユーザーの位置と、地図データ602とを照査して、何れかの人間用搬送機器の乗り口位置6113にユーザーが位置しているか否かを判定する。そして、肯定判定された場合は、ユーザーが位置している乗り口位置6113に対応付けられた人間用搬送機器データ611を読み出し、読み出した人間用搬送機器データ611を用いて位置算出を行う。
【0100】
7−5.乗降検出
ユーザーの搬送路の乗降検出を次のように行ってもよい。すなわち、上記と同様に所定の測位演算を行ってユーザーの位置を算定する。そして、算定したユーザーの位置と、人間用搬送機器の乗り口位置や降り口位置とを照合することにより乗降検出を行う。
【0101】
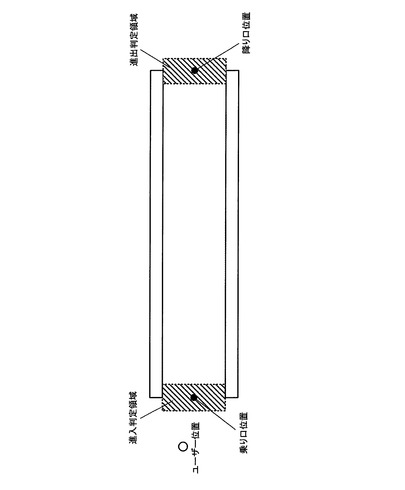
図13は、この場合における乗り降りの検出の説明図であり、人間用搬送機器を上方から俯瞰した図を示している。例えば、人間用搬送機器の乗り口位置を含む所定範囲の領域を進入判定領域として定めておく。図13では、乗り口位置を中心とする矩形領域を進入判定領域とする場合を図示している。
【0102】
ナビゲーション装置2は、測位演算により算定したユーザーの位置が進入判定領域に含まれる、或いは、算定位置を結んだ移動軌跡が進入判定領域に差し掛かったと判定した場合に、ユーザーが人間用搬送機器の搬送路に乗ったものと判定する。
【0103】
同様に、人間用搬送機器の降り口位置を含む所定範囲の領域(例えば図13の矩形領域)を進出判定領域として定めておき、測位演算により算定したユーザーの位置或いは移動軌跡が進出判定領域に差し掛かったか否かを判定することによって、ユーザーが人間用搬送機器の搬送路から降りたことを検出してもよい。
【0104】
7−6.方位センサー
上述した実施形態では、ジャイロセンサーの検出結果に基づいてユーザーの歩行方向を推測するものとして説明したが、地磁気センサーなどの方位センサーをセンサー部40に具備させておき、方位センサーからユーザーの歩行方向を取得してもよい。
【0105】
7−7.センサー部のキャリブレーション
センサー部40に対するキャリブレーション(センサーの更正処理)を所定のタイミングで行い、キャリブレーションされたセンサー部40の検出結果に基づいて歩行検出を行ってもよい。キャリブレーションは、例えば、センサーのゼロ点バイアスやスケールファクターといった誤差パラメーター値を公知の手法により算出し、算出した誤差パラメーター値で検出結果を補正することにより行う。
【0106】
キャリブレーションを行うタイミングとしては、例えば電源投入時のタイミングや所定の時間間隔が経過したタイミング、ユーザーによりキャリブレーションの指示操作がなされたタイミング、温度変化が一定以上生じたタイミング等とすることができる。キャリブレーションされたセンサー部40の検出結果を用いることで、歩行検出の正確性を向上させることができる。
【0107】
7−8.歩行検出及び歩行方向推測
上述した実施形態では、フィルター処理を施した後の上下動の加速度に基づいてユーザーの一歩を検出するものとして説明した。検出の精度は低下する可能性があるが、フィルター処理を施さずに、検出された上下動の加速度そのものに基づいてユーザーの一歩を検出してもよい。また、歩行方向の推測についても同様に、フィルター処理を施さない角速度そのものに基づいてユーザーの歩行方向を推測してもよい。
【符号の説明】
【0108】
1 位置算出システム、 2 ナビゲーション装置、 3 乗り口発信器、 4 降り口発信器、 10 処理部、 20 操作部、 30 表示部、 40 センサー部、 41 加速度センサー、 43 ジャイロセンサー、 50 近距離無線通信部、 60 記憶部、 70 バス
【技術分野】
【0001】
本発明は、位置算出方法及び位置算出装置に関する。
【背景技術】
【0002】
加速度センサーやジャイロセンサーなどの慣性センサーの検出結果に基づいてユーザーの歩行検出を行って、ユーザーの位置を算出する技術が考案されている。ユーザーの歩行(一歩)を検出する手法としては、加速度センサーにより検出された上下動の加速度の時間変化におけるピークを検出するものが知られている(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平9−152355号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
慣性センサーを利用した従来の位置算出方法では、位置算出装置を持ったユーザーが動く歩道やエスカレーターなどの人間用搬送機器の搬送路に乗っている際には、ユーザーの位置を正確に求めることができないという問題がある。搬送路上でユーザーが静止している場合には、通常は加速度のピークが検出されないため、ユーザーは静止しているものと判定される。しかし、搬送路の移動によって実際にはユーザーの位置は変動する。一方で、搬送路上でユーザーが歩行している場合には、加速度のピークを検出することでユーザーの歩行は検出できる。しかし、搬送路の移動成分を検出することはできないため、算出される位置はユーザーの正確な位置とはならない。
【0005】
例えば、子供や老人などのユーザーに位置算出装置を持たせて管理側でユーザーの位置を管理したい場合や、ユーザーが自身の歩行ルートを位置算出装置に計測・記録させておいて後から利用したい場合などの利用状況を想定すると、ユーザーが人間用搬送機器の搬送路に乗っている際の時間がたとえ僅かな時間であったとしても、その際のユーザーの位置を正しく求めたいという要望がある。
【0006】
本発明は上述した課題に鑑みて為されたものであり、その目的とするところは、人間用搬送機器の搬送路にユーザーが乗った際のユーザーの位置を正しく求めるための新たな手法を提案することにある。
【課題を解決するための手段】
【0007】
以上の課題を解決するための第1の形態は、乗り口から降り口に至る搬送路上において歩行可能に人間を搬送する人間用搬送機器の前記搬送路にユーザーが乗った際のユーザーの位置を算出する位置算出方法であって、前記人間用搬送機器の搬送速度を積分することと、前記ユーザーの一歩を検出することと、前記ユーザーの一歩が検出されない場合には前記積分の結果を用いて、一歩が検出された場合には前記積分の結果及び前記一歩の歩幅を用いて、前記搬送路上における前記ユーザーの移動距離を算出することと、少なくとも前記乗り口の位置と前記移動距離とを用いて前記ユーザーの位置を算出することと、を含む位置算出方法である。
【0008】
また、他の形態として、ユーザーの位置を算出する位置算出装置であって、乗り口から降り口に至る搬送路上において歩行可能に人間を搬送する人間用搬送機器の前記搬送路にユーザーが乗ったことを検出する検出部と、前記人間用搬送機器の搬送速度を積分する積分部と、前記ユーザーの一歩を検出する歩行検出部と、前記歩行判定部による一歩の検出がなされない場合には前記積分部の積分結果を用いて、一歩の検出がなされた場合には前記積分部の積分結果及び前記一歩の歩幅を用いて、前記搬送路上における前記ユーザーの移動距離を算出する移動距離算出部と、前記検出部による検出がなされた場合に、少なくとも前記乗り口の位置と前記移動距離算出部により算出された移動距離とを用いて前記ユーザーの前記搬送路上の位置を算出する位置算出部と、を備えた位置算出装置を構成してもよい。
【0009】
この第1の形態等によれば、人間用搬送機器の搬送速度を積分し、ユーザーの一歩が検出されない場合には積分の結果を用いて、一歩が検出された場合には積分の結果及び一歩の歩幅を用いて、搬送路上におけるユーザーの移動距離を算出する。そして、少なくとも乗り口の位置と移動距離とを用いてユーザーの位置を算出する。
【0010】
ユーザーの一歩が検出されない場合は、ユーザーが搬送路上で静止していることが想定されるため、搬送機器の搬送速度を積分した結果を用いて移動距離を算出することが適切である。他方、ユーザーの一歩が検出された場合は、ユーザーが搬送路上で歩行していることが想定されるため、搬送機器の搬送速度を積分した結果に加えて、ユーザーの一歩の歩幅も用いて移動距離を算出することが適切である。搬送路の乗り口の位置は定まっているため、搬送路上のユーザーの移動距離が適切に求まれば、搬送路上におけるユーザーの位置も正確に求まる。
【0011】
また、第2の形態として、第1の形態の位置算出方法であって、前記乗り口には、前記乗り口の位置、前記搬送速度、及び、搬送方向を少なくとも含む搬送情報を発信する発信器が設置されており、前記搬送情報を受信することを更に含み、前記積分することは、前記受信した搬送情報に含まれる搬送速度を積分することであり、前記位置を算出することは、前記受信した搬送情報に含まれる乗り口の位置及び搬送方向と、前記移動距離とを用いて前記ユーザーの位置を算出することである、位置算出方法を構成してもよい。
【0012】
この第2の形態によれば、搬送路の乗り口の位置、搬送速度、及び、搬送方向を少なくとも含む搬送情報を搬送路の乗り口に設置された発信器から受信する。そして、受信した搬送情報に含まれる搬送速度を積分し、受信した搬送情報に含まれる乗り口の位置及び搬送方向と、算出した移動距離とを用いてユーザーの位置を算出する。搬送路に関する搬送情報を発信器から取得することで、搬送路上におけるユーザーの位置算出に供することができる。
【0013】
また、第3の形態として、第2の形態の位置算出方法であって、前記発信器は、前記搬送路の長さを前記搬送情報に更に含めて発信しており、前記移動距離が前記受信した搬送情報に含まれる前記搬送路の長さに達した場合に、前記ユーザーが前記搬送路から降りたことを検出することを更に含む、位置算出方法を構成してもよい。
【0014】
この第3の形態によれば、発信器から受信した搬送情報に含まれる搬送路の長さに移動距離が達するか否かを判定するといった簡易な判定方法により、ユーザーが搬送路から降りたことを検出することができる。
【0015】
また、第4の形態として、第1〜第3の何れかの形態の位置算出方法であって、前記降り口には、降り口に到来した旨の降り口情報を発信する降り口発信器が設置されており、前記降り口情報を受信した場合に、前記ユーザーが前記搬送路から降りたことを検出することを更に含む、位置算出方法を構成してもよい。
【0016】
この第4の形態によれば、降り口発信器から降り口情報を受信するといった簡易な判定方法により、ユーザーが搬送路から降りたことを検出することができる。
【0017】
また、第5の形態として、第1の形態の位置算出方法であって、前記搬送路上に位置するか否かに関わらず、所定の測位演算を行って前記ユーザーの位置を算定することと、乗り口の位置、搬送速度及び搬送方向を少なくとも含む搬送情報を人間用搬送機器毎に記憶した記憶部から、前記ユーザーが乗った前記人間用搬送機器の搬送情報を前記算定された位置に基づいて読み出すことと、を更に含み、前記積分することは、前記読み出した搬送情報に含まれる搬送速度を積分することであり、前記位置を算出することは、前記読み出した搬送情報に含まれる乗り口の位置及び搬送方向と、前記移動距離とを用いて前記ユーザーの位置を算出することである、位置算出方法を構成してもよい。
【0018】
この第5の形態によれば、搬送情報を人間用搬送機器毎に記憶した記憶部から、ユーザーが乗った人間用搬送機器の搬送情報を、測位演算によって算定した位置に基づいて読み出す。そして、読み出した搬送情報に含まれる搬送速度を積分し、読み出した搬送情報に含まれる乗り口の位置及び搬送方向と、算出した移動距離とを用いて、ユーザーの位置を算出する。搬送情報を人間用搬送機器毎に記憶部に記憶させておけばよいため、例えば第2の形態のように、搬送情報を発信する発信器を搬送路の乗り口に設置する必要がない。
【0019】
また、第6の形態として、第1〜第5の何れかの形態の位置算出方法であって、前記人間用搬送機器は、動く歩道又はエスカレーターである、位置算出方法を構成してもよい。
【図面の簡単な説明】
【0020】
【図1】(A)は位置算出システムの概略図。(B)は乗り口発信器の構成図。
【図2】ナビゲーション装置をユーザーが装着した状態を示す図。
【図3】歩数検出の原理の説明図。
【図4】Z軸の加速度の計測結果の一例を示す図。
【図5】ナビゲーション装置の機能構成の一例を示すブロック図。
【図6】センサーデータのデータ構成の一例を示す図。
【図7】移動軌跡データのデータ構成の一例を示す図。
【図8】位置算出処理の流れを示すフローチャート。
【図9】歩行検出処理の流れを示すフローチャート。
【図10】動く歩道通過時処理の流れを示すフローチャート。
【図11】(A)は変形例における位置算出システムの概略図。(B)は変形例における乗り口発信器の構成図。(C)は変形例における降り口発信器の構成図。
【図12】人間用搬送機器データベースの構成図。
【図13】搬送路の乗降検出の説明図。
【発明を実施するための形態】
【0021】
以下、図面を参照して、ナビゲーション装置を装着した歩行者であるユーザーの位置を算出するシステムである位置算出システムの実施形態について説明する。但し、本発明を適用可能な実施形態が以下説明する実施形態に限定されるわけではない。
【0022】
1.システム構成
図1は、本実施形態における位置算出システム1のシステム構成を説明するための図である。位置算出システム1は、図1(A)に示すように、着脱式のナビゲーション装置2と、人間用搬送機器の一種である動く歩道と、当該動く歩道の乗り口位置に設置された乗り口発信器3とを備えて構成され、ナビゲーション装置2を装着したユーザーの位置を算出するシステムである。
【0023】
図2は、ナビゲーション装置2をユーザーが装着した様子及びナビゲーション装置2の概略構成の説明図である。ナビゲーション装置2は、操作部20からの指示操作に従って、ユーザーの位置算出を行ってナビゲーションを行う機能を有する電子機器であり、図2に示すように、例えばユーザーの右腰に装着されて使用される。
【0024】
ナビゲーション装置2は、加速度センサー41及びジャイロセンサー43を有するセンサー部40を具備している。そして、加速度センサー41により検出された加速度に基づいてユーザーの一歩(歩行)を検出する。また、ジャイロセンサー43により検出された角速度に基づいてユーザーの移動方向を推測する。そして、一歩を検出する毎に歩幅を加算して歩行距離を算出するとともに、推測した移動方向に基づいてユーザーの位置を算出する。そして、算出した位置をプロットしたナビゲーション画面を生成して、表示部30に表示させる。
【0025】
加速度センサー41は、直交3軸の加速度を検出するセンサーであり、歪みゲージ式や圧電式の何れであってもよく、またMEMS(Micro Electro Mechanical Systems)センサーであってもよい。また、ジャイロセンサー43は、直交3軸の角速度を検出するセンサーであり、加速度センサー41と軸方向が同一となるように配置設定されている。尚、図2では、加速度センサー41とジャイロセンサー43とを独立したセンサーとして図示しているが、加速度センサー41とジャイロセンサー43とは一体型のセンサーであってもよい。
【0026】
本実施形態では、ユーザーから見て前後方向の前方向を「X軸の正方向」、左右方向の右方向を「Y軸の正方向」、上下方向(鉛直方向)の下方向を「Z軸の正方向」とする直交3軸の座標系として説明する。また、説明を分かり易くするために、加速度センサー41及びジャイロセンサー43の検出軸の軸方向及び各軸の正方向を、X軸,Y軸,Z軸の軸方向及び正方向と同じとして説明する。但し、実際には異なっていてもよいのは勿論である。加速度センサー41及びジャイロセンサー43の検出軸とX軸,Y軸,Z軸の軸方向とは、相対的な関係でユーザーに固定されるため、公知の行列計算によって、加速度センサー41及びジャイロセンサー43の検出結果からX,Y,Zそれぞれの値を算出することができる。
【0027】
動く歩道は、踏み面である搬送路が移動することで人間を搬送する人間用搬送機器の一種であり、大規模な駅構内や空港内、ショッピングモールなどに設置されている。歩行者であるユーザーは、乗り口から搬送路に乗って移動し、降り口で搬送路から降りる。搬送路上では、ユーザーは静止していることもできるし、歩行することもできる。
【0028】
乗り口発信器3は、ユーザーが動く歩道の乗り口に到来したことをナビゲーション装置2に通知することを目的として乗り口位置に設置される発信装置であり、いわばナビゲーション装置2の位置算出を支援する支援装置(支援システム)とも言える。
【0029】
乗り口発信器3は、図1(B)に示すように、動く歩道の搬送情報を記憶した動く歩道搬送データ31を記憶している。動く歩道搬送データ31には、例えば、動く歩道の乗り口位置の位置座標である乗り口位置311と、動く歩道の搬送路の速度である搬送速度313と、動く歩道の搬送路が移動する方向である搬送方向315と、動く歩道の乗り口位置から降り口位置までの長さである搬送路長317とが含まれる。
【0030】
乗り口発信器3は、動く歩道搬送データ31を発信信号に含めて、所定の近距離無線方式で発信する。発信信号の信号強度等は、発信信号の到達範囲が規定の距離となるように予め設計されている。ユーザーが動く歩道の乗り口に到来し、動く歩道に進入しようとしていることをユーザーに通知することが目的であるため、発信信号の到達範囲は乗り口位置近傍の範囲(例えば乗り口発信器3の設置位置を中心として半径1m以内)とすることが適切である。なお、所定の指向性アンテナを利用して動く歩道の進入通路内に電波を発信する構成としてもよい。
【0031】
ナビゲーション装置2を装着したユーザーが動く歩道の乗り口位置に接近すると、ナビゲーション装置2は乗り口発信器3から発信信号を受信する。すると、ナビゲーション装置2は、ユーザーが動く歩道の搬送路に乗ったことを検出する。そして、受信した発信信号に含まれる動く歩道搬送データ31を用いた位置算出処理を行うことによって、動く歩道上におけるユーザーの正確な位置算出を実現する。
【0032】
2.原理
2−1.一歩の検出の原理
最初に、ユーザーの一歩の検出の原理について説明する。一歩の検出は、加速度センサー41により検出された直交3軸の加速度のうち、ユーザーの上下動の加速度であるZ軸の加速度に基づいて行う。具体的には、Z軸の加速度の時系列変化において、加速度がピーク(極大値)となった時刻においてユーザーにより一歩が踏み出されたものと判定し、一歩とカウントする。
【0033】
しかしながら、加速度センサー41により検出されるZ軸の加速度には高周波のノイズ成分が含まれ得る。そのため、一歩であると思って検出した加速度のピークが“真の”ピークではなく、単なるノイズ成分である“偽の”ピークである場合があり、歩数のミスカウントに繋がる場合がある。
【0034】
上述したZ軸の加速度に含まれるノイズは高周波の成分である。そこで、本実施形態では、Z軸の加速度に対してフィルター処理を行うことで、加速度センサー41により検出されるZ軸の加速度の低周波成分を抽出する。
【0035】
具体的には、歩行時の1歩1歩の周波数(1秒当たりの歩数)は、高く見積もっても5[Hz]程度であり、10[Hz]となることはないと言える。そのため、数[Hz]をカットオフ周波数(所定の閾値周波数)として、それよりも高い周波数成分をカットすることで、加速度の低周波成分、すなわち歩行時の加速度の成分を抽出する。そして、抽出した低周波成分の加速度のピークを検出して一歩と判定する。
【0036】
図3は、Z軸の加速度の生のデータと、Z軸の加速度に対してフィルター処理を施した後のデータとを対比したグラフである。図3において、横軸は時間を示しており、縦軸はフィルター処理を施す前と施した後とのそれぞれにおけるZ軸の加速度を示している。また、フィルター処理を施す前の加速度を波線で、フィルター処理を施した後の加速度を実線で示している。
【0037】
この図を見ると、フィルター処理を施す前においては、Z軸の加速度は高周波成分を含んでおり、上下方向に大きな振幅で細かく振動していることがわかる。一方、フィルター処理を施した後においては、Z軸の加速度から高周波成分が除去されて、加速度が平滑化されていることがわかる。フィルター処理後の加速度の時系列変化において、○印で囲んで示した部分が、加速度の大きさがピーク(極大値)となった部分であり、一歩が踏み出された部分である。以下では、隣接する加速度のピーク間の時間のことを「一歩所要時間」として説明する。
【0038】
2−2.歩行方向推測の原理
次に、ユーザーの歩行方向推測の原理について説明する。本実施形態では、ジャイロセンサー43により検出された上下方向(Z軸)の軸回りの角速度に基づいてユーザーの歩行方向を推測する。すなわち、Z軸はヨー軸に相当するため、ヨー軸の軸回りの角速度に基づいて歩行方向を推測する。
【0039】
具体的には、ジャイロセンサー43により検出された角速度に対してフィルター処理を行うことで、角速度を平滑化する。そして、平滑化されたZ軸(ヨー軸)の軸回りの角速度に対して積分処理を行ってユーザーの移動方向を推測する。本実施形態では、ジャイロセンサー43の検出軸の軸方向及び各軸の正方向をX軸,Y軸,Z軸の軸方向及び正方向と同じとしているため、Z軸の軸回りの角速度を積分することで、XY平面におけるユーザーの移動方向を求めることができる。
【0040】
2−3.動く歩道通過時の処理
次に、ユーザーの動く歩道通過時における位置算出の原理について説明する。ユーザーが動く歩道の搬送路に乗っている際には、一歩が踏み出される毎に歩幅を加算していく方法では、ユーザーの正確な位置を求めることができない。なぜなら、ユーザーが乗っている搬送路の移動を考慮していないためである。
【0041】
本願発明者は、ナビゲーション装置2を被験者に装着させ、実際に動く歩道の搬送路上を歩行させる実験を行った。動く歩道の搬送路長は約20mであり、搬送速度は約0.65m/sであった。動く歩道の手前から被験者に歩行を開始させて、一定の歩行速度を保ったまま搬送路に進入させ、搬送路に乗った後も同じ歩行速度で歩行を継続させた。
【0042】
この実験の結果、被験者が搬送路に乗っていた時間は約10秒であり、計測された移動距離は13.5mであった。動く歩道の搬送路長は約20mであるため、計測された移動距離には約6.5mの誤差が含まれていることになる。この6.5mという長さは、動く歩道の搬送速度でちょうど10秒間進んだ距離に相当する。
【0043】
参考として、この実験において計測されたZ軸の加速度の時間変化のグラフを図4に示す。グラフの見方は図3と同じであり、2本の太実線で囲まれる部分が、被験者の動く歩道通過時に検出された加速度を示している。このグラフを見ると、ユーザーが動く歩道を通過している際には、通常時に検出される加速度よりも振幅が大きくなっており、通常時とは異なる特性を示していることがわかる。
【0044】
上記の実験結果を考慮して、本実施形態では、搬送路にユーザーが乗っている際のユーザーの位置を正しく求めるため、ユーザーが乗り口位置に到来した際に乗り口発信器3から動く歩道搬送データ31を受信する。そして、受信した動く歩道搬送データ31を用いた位置算出処理を行う。具体的には、通常時における歩行検出は継続しつつ、受信した動く歩道搬送データ31に含まれている搬送速度313を積分することで搬送路の移動距離を算出する。
【0045】
歩行検出によって一歩が検出されなかった場合は、搬送路上でユーザーが静止していることが想定されるため、搬送路の移動距離をユーザーの移動距離とする。一方、歩行検出によって一歩が検出された場合は、搬送路上でユーザーが歩行していることが想定されるため、搬送路の移動距離にユーザーの歩行距離を加算した距離をユーザーの移動距離とする。また、搬送路上におけるユーザーの移動方向は、乗り口発信器3から取得した動く歩道搬送データ31に含まれている搬送方向315と同じである。このようにして搬送路上におけるユーザーの移動距離及び移動方向が求まるため、搬送路上におけるユーザーの位置も正しく求めることができる。
【0046】
また、本実施形態では、ユーザーが搬送路に乗ったことを検出した場合に、乗り口発信器3から受信した動く歩道搬送データ31に含まれている乗り口位置311で、ナビゲーション画面に出力する出力位置をリセットする。そして、乗り口位置を基準として移動距離を算出し、乗り口発信器3から受信した動く歩道搬送データ31に含まれている搬送路長317に移動距離が達した場合に、ユーザーが動く歩道の搬送路から降りたものと判定する。
【0047】
3.機能構成
図5は、ナビゲーション装置2の機能構成を示すブロック図である。ナビゲーション装置2は、処理部10と、操作部20と、表示部30と、センサー部40と、近距離無線通信部50と、記憶部60とを備え、各部がバス70で接続されたコンピューターシステムである。
【0048】
処理部10は、記憶部60に記憶されているシステムプログラム等の各種プログラムに従ってナビゲーション装置2の各部を統括的に制御する機能部であり、例えばCPU(Central Processing Unit)等のプロセッサーにより実現される。本実施形態では、処理部10は、記憶部60に記憶されている位置算出プログラム601に従って歩行者であるユーザーの位置を算出・決定し、出力位置をプロットしたナビゲーション画面を生成して表示部30に表示させる。
【0049】
操作部20は、例えばタッチパネルやボタンスイッチ等により構成される入力装置であり、押下されたキーやボタンの信号を処理部10に出力する。この操作部20の操作により、位置算出の開始指示操作や、リセット指示操作、電源切断指示操作等の各種指示入力がなされる。
【0050】
表示部30は、LCD(Liquid Crystal Display)等により構成され、処理部10から入力される表示信号に基づいた各種表示を行う表示装置である。表示部30には、ユーザーの移動軌跡や時刻情報等が表示される。
【0051】
センサー部40は、ユーザーの歩行状態を検出するためのセンサーを有する機能部であり、例えば加速度センサー41とジャイロセンサー43とを備えて構成される。加速度センサー41及びジャイロセンサー43の検出結果は、処理部10に随時出力される。
【0052】
近距離無線通信部50は、ナビゲーション装置2が乗り口発信器3等の外部機器と近距離の無線通信を行うための通信装置である。この機能は、例えば、Bluetooth(登録商標)やZigBee(登録商標)といった公知の近距離無線方式の技術を用いて実現される。
【0053】
記憶部60は、例えばROM(Read Only Memory)やフラッシュROM、RAM(Random Access Memory)等のメモリを備えた記憶装置であり、処理部10がナビゲーション装置2を制御するためのシステムプログラムや、位置算出機能を実現するための各種プログラムやデータ等を記憶している。また、処理部10により実行されるシステムプログラム、各種処理プログラム、各種処理の処理中データ、処理結果などを一時的に記憶するワークエリアを形成している。
【0054】
4.データ構成
図5に示すように、記憶部60には、プログラムとして、処理部10により読み出され、位置算出処理(図8参照)として実行される位置算出プログラム601が記憶されている。位置算出プログラム601は、歩行検出処理(図9参照)として実行される歩行検出プログラム6011と、動く歩道通過時処理(図10参照)として実行される動く歩道通過時処理プログラム6013とをサブルーチンとして有している。
【0055】
位置算出処理とは、処理部10が、加速度センサー41の検出結果に基づいて歩行検出を行うとともに、ユーザーが動く歩道の搬送路に乗ったことを検出した場合に、乗り口発信器3から受信した動く歩道搬送データ31を用いた位置算出処理を行って、ユーザーの位置を算出する処理である。位置算出処理については、フローチャートを用いて詳細に後述する。
【0056】
また、記憶部60には、データとして、地図データ602と、歩幅データ603と、センサーデータ604と、歩数データ605と、移動距離データ607と、移動軌跡データ609と、動く歩道搬送データ31とが記憶される。
【0057】
地図データ602は、位置算出処理により算出・決定した出力位置をプロットしたナビゲーション画面を生成するための地図情報が記憶されたデータである。
【0058】
歩幅データ603は、ユーザーの歩幅が設定されたデータである。歩幅の設定は、例えば固定値を設定することとしてもよいし、ユーザーの身長等の身体的特徴に基づいて設定することとしてもよい。
【0059】
センサーデータ604は、センサー部40の検出結果のデータであり、そのデータ構成例を図6に示す。センサーデータ604には、センサー部40の検出時刻6041(例えばミリ秒単位の時刻であり、その時間間隔は移動軌跡データ609の出力時刻6091の時間間隔より十分に短い。)と、加速度センサー41により検出された3軸の加速度6043と、ジャイロセンサー43により検出された3軸の軸回りの角速度6045とが対応付けて記憶される。
【0060】
歩数データ605は、フィルター処理後のZ軸の加速度のピークを計測することでカウントされるユーザーの歩数のデータである。また、移動距離データ607は、動く歩道の入口位置を基準として算出されるユーザーの移動距離のデータである。
【0061】
移動軌跡データ609は、ユーザーの移動軌跡のデータであり、そのデータ構成例を図7に示す。移動軌跡データ609には、出力時刻6091と、出力位置6093と、移動速度6095と、移動方向6097と、種別6099とが対応付けて記憶される。
【0062】
種別6099は、出力位置6093、移動速度6095及び移動方向6097が、動く歩道通過時に算出されたものと、通常時に算出されたものとの何れであるかを示すフラグであり、前者の場合は「歩道通過時」、後者の場合は「通常時」がそれぞれ記憶される。
【0063】
動く歩道通過時には、ユーザーの歩行速度と動く歩道の搬送速度とを合算した速度が移動速度6095となる。ユーザーの歩行速度は、一歩所要時間と一歩の歩幅とから算出することができる。また、動く歩道通過時におけるユーザーの移動方向6097は、動く歩道の搬送方向θと等しい。
【0064】
動く歩道搬送データ31は、近距離無線通信部50が乗り口発信器3から受信することで取得される動く歩道の搬送情報が格納されたデータである。
【0065】
5.処理の流れ
図8は、記憶部60に記憶されている位置算出プログラム601が処理部10により読み出されて実行されることで、ナビゲーション装置2において実行される位置算出処理の流れを示すフローチャートである。
【0066】
位置算出処理は、処理部10が、操作部20を介してユーザーにより電源投入操作がなされたことを検出した場合に実行を開始する処理である。以下の位置算出処理においては、センサー部40の検出結果が、記憶部60のセンサーデータ604に随時格納されるものとして説明する。
【0067】
先ず、処理部10は、記憶部60に記憶されている歩行検出プログラム6011を読み出して実行することで、歩行検出処理を開始する(ステップA1)。以後、位置算出処理が終了するまで、歩行検出処理は常時実行される。
【0068】
図9は、歩行検出処理の流れを示すフローチャートである。
先ず、処理部10は、加速度センサー41及びジャイロセンサー43の各軸の出力値に対するフィルター処理を実行する(ステップB1)。すなわち、加速度センサー41及びジャイロセンサー43の各軸の出力値から高周波成分を除去する処理を行う。
【0069】
次いで、処理部10は、フィルター処理が施された後の上下動(Z軸)の加速度からピークを検出したか否かを判定し(ステップB3)、ピークが検出されなかった場合は(ステップB3;No)、ステップB1に戻る。また、ピークを検出した場合は(ステップB3;Yes)、処理部10は、一歩と判定して、記憶部60の歩数データ605を更新する(ステップB5)。
【0070】
次いで、処理部10は、フィルター処理後のZ軸の加速度の前回ピークから今回ピークまでの時間を算出して、一歩所要時間とする(ステップB7)。そして、処理部10は、算出した一歩所要時間の間のフィルター処理後のZ軸回りの角速度を積分することで、当該一歩所要時間における歩行方向の変化量を算出する(ステップB9)。
【0071】
その後、処理部10は、記憶部60の移動軌跡データ609に記憶されている最新の移動方向6097と、ステップB9で算出した歩行方向の変化量とを用いて、ユーザーの最新の歩行方向を更新する(ステップB11)。これら一連の処理を行った後、処理部10は、ステップB1に戻る。
【0072】
図8の位置算出処理に戻って、歩行検出処理を開始すると、処理部10は、ユーザーが搬送路に乗ったか否かの検出を行う(ステップA3)。ユーザーが搬送路に乗ったか否かの検出は、近距離無線通信部50が乗り口発信器3から発信信号を受信したことを検出することにより行う。
【0073】
そして、搬送路に乗ったことを検出した場合は(ステップA3;Yes)、処理部10は、乗り口発信器3から受信した動く歩道搬送データ31に含まれる乗り口位置311で、移動軌跡データ609の最新の出力位置6093をリセットする処理を行う(ステップA5)。リセット処理を行った後、処理部10は、記憶部60に記憶されている動く歩道通過時処理プログラム6013に従って動く歩道通過時処理を実行する(ステップA7)。
【0074】
図10は、動く歩道通過時処理の流れを示すフローチャートである。
先ず、処理部10は、受信した搬送速度313に単位時間を乗算して、当該単位時間における搬送路の移動距離を算出する(ステップC1)。ここで単位時間とは、例えば位置の出力時間間隔の1/n倍(n>1)の時間として設定される時間である。例えば、位置の出力時間間隔が「1秒(1000ミリ秒)」で「n=100」とした場合は、単位時間として「10ミリ秒」を設定する。
【0075】
次いで、処理部10は、ステップC1で算出した搬送路の移動距離を、移動距離データ607に記憶されているユーザーの移動距離に加算して更新する(ステップC3)。そして、処理部10は、一歩を検出したか否かを判定する(ステップC5)。処理部10は歩行検出処理を並列して実行しており、その結果に基づいて一歩を検出する。
【0076】
一歩を検出しなかったと判定した場合は(ステップC5;No)、処理部10は、ステップC9へと処理を移行する。また、一歩を検出したと判定した場合は(ステップC5;Yes)、移動距離データ607に記憶されているユーザーの移動距離に一歩の歩幅を加算して更新する(ステップC7)。
【0077】
その後、処理部10は、位置出力タイミングであるか否かを判定し(ステップC9)、位置出力タイミングであると判定した場合は(ステップC9;Yes)、移動距離データ607に記憶されているユーザーの移動距離と、受信した搬送方向315とを用いて、ユーザーの位置を新たに算出し、移動軌跡データ609の出力位置6093を更新する(ステップC11)。
【0078】
そして、処理部10は、最新の出力位置6093で表示部30のナビゲーション画面の表示を更新した後(ステップC13)、或いはステップC9において位置出力タイミングではないと判定した場合に(ステップC9;No)、ユーザーが搬送路から降りたことの検出を行う(ステップC15)。具体的には、乗り口位置からのユーザーの移動距離が、受信した搬送路長317に達したか否かを判定する。
【0079】
処理部10は、動く歩道からの進出を検出するまでステップC1〜C13の処理を繰り返し実行し(ステップC15;No→C1)、動く歩道からの進出を検出した場合に(ステップC15;Yes)、動く歩道通過時処理を終了する。
【0080】
図8の位置算出処理に戻って、ステップA3において搬送路に乗ったことを検出しなかった場合は(ステップA3;No)、処理部10は、位置出力タイミングであるか否かを判定する(ステップA13)。
【0081】
そして、位置出力タイミングであると判定した場合は(ステップA13;Yes)、処理部10は、歩行検出処理で検出した歩数及び歩行方向と、歩幅データ603の歩幅とを用いて、ユーザーの位置を新たに算出し、移動軌跡データ609の出力位置6093を更新する(ステップA15)。そして、処理部10は、最新の出力位置6093で表示部30のナビゲーション画面の表示を更新する(ステップC17)。
【0082】
ステップA7又はA17の処理を行った後、又は、ステップA13において位置出力タイミングではないと判定した場合は(ステップA13;No)、処理部10は、位置算出を終了するか否かを判定する(ステップA19)。すなわち、操作部20を介して位置算出の終了指示操作がなされたか否かを判定する。
【0083】
そして、位置算出をまだ終了しないと判定した場合は(ステップA19;No)、処理部10は、ステップA3に戻り、位置算出を終了すると判定した場合は(ステップA19;Yes)、位置算出処理を終了する。
【0084】
6.作用効果
位置算出システム1において、ナビゲーション装置2は、動く歩道の乗り口位置に設置された乗り口発信器3からの発信信号を受信することで、ユーザーが動く歩道に乗ったことを検出する。そして、乗り口発信器3から受信した動く歩道の搬送速度を積分し、歩行検出処理によってユーザーの一歩が検出されない場合には搬送速度を積分して得られる歩道の移動距離を用いて、ユーザーの一歩が検出された場合は搬送速度を積分して得られる歩道の移動距離及びユーザーの一歩の歩幅を用いて、動く歩道の搬送路上におけるユーザーの移動距離を算出する。
【0085】
また、ナビゲーション装置2は、乗り口発信器3から受信した動く歩道の乗り口位置でナビゲーション画面に表示させる出力位置をリセットする。そして、乗り口位置を基準としてユーザーの移動距離を算出し、乗り口発信器3から受信した動く歩道の搬送方向を併せて用いて、ユーザーの位置を算出する。そして、乗り口位置を基準として算出した移動距離が、乗り口発信器3から受信した動く歩道の搬送路長に達した場合に、ユーザーが動く歩道から降りたことを検出する。
【0086】
上下動の加速度の検出結果を用いた歩行検出によってユーザーの一歩が検出されない場合は、ユーザーは動く歩道上で静止していることが想定されるため、動く歩道の搬送速度を積分した結果を用いて移動距離を算出することが適切である。他方、ユーザーの一歩が検出された場合は、ユーザーは動く歩道上で歩行していることが想定されるため、動く歩道の搬送速度を積分した結果に加えて、ユーザーの一歩の歩幅も用いて移動距離を算出することが適切である。その上で、動く歩道の乗り口位置を基準として移動距離を算出することで、動く歩道の搬送路上におけるユーザーの位置を正確に求めることが可能となる。
【0087】
7.変形例
7−1.電子機器
本発明は、ナビゲーション装置の他にも、位置算出装置を備えた電子機器であれば何れの電子機器にも適用可能である。例えば、歩数計や腕時計等についても同様に適用可能である。
【0088】
7−2.降り口発信器
上述した実施形態では、動く歩道の乗り口位置にのみ発信器を設置する場合について説明したが、動く歩道の乗り口位置ばかりでなく、動く歩道の降り口位置にも発信器を設置することとしてもよい。
【0089】
図11は、この場合における位置算出システムのシステム構成の概略を示す図である。図11(A)の位置算出システムでは、動く歩道の乗り口位置に乗り口発信器3が設置されているとともに、動く歩道の降り口位置に降り口発信器4が設置されている。
【0090】
乗り口発信器3は、図11(B)に示すように、乗り口位置311と、搬送速度313と、搬送方向315とを含む動く歩道搬送データ33を記憶している。上述した実施形態では、ユーザーが搬送路から降りたことを検出するために搬送路長317が必要であったが、ここでは不要であるため、動く歩道搬送データ33からは搬送路長317を除外している。図1(B)の動く歩道搬送データ31とはデータ構成が異なるため、図11(B)では符号を変えて動く歩道搬送データ33としている。
【0091】
降り口発信器4は、ユーザーが動く歩道の降り口に到来したことをナビゲーション装置2に通知することを目的として設置される発信装置である。降り口発信器4は、図11(C)に示すように、ユーザーが降り口に到来した旨の降り口情報として、降り口位置411(降り口位置の位置座標)を記憶している。そして、降り口位置411を発信信号に含めて発信する。
【0092】
ナビゲーション装置2を装着したユーザーが動く歩道の降り口に差し掛かると、ナビゲーション装置2は、降り口発信器4の発信信号を受信する。すると、ナビゲーション装置2は、ユーザーが搬送路から降りたことを検出し、実行中の動く歩道通過時処理を終了する。この場合には、乗り口発信器3と降り口発信器4とが位置算出支援システムとなる。
【0093】
7−3.人間用搬送機器
上述した実施形態では、動く歩道に本発明を適用した場合を例に挙げて説明したが、他の人間用輸送機器にも適用可能である。例えば、エスカレーターについても本発明を同様に適用可能である。
【0094】
この場合は、エスカレーターの乗り口位置に乗り口発信器を設置する。乗り口発信器には、エスカレーターの搬送情報を記憶させておく。但し、エスカレーターは傾斜しているため、搬送方向として、水平面におけるエスカレーターの搬送方向「θ」に加えて、エスカレーターの傾斜角度「φ」も記憶させておく。そして、これらの搬送情報を乗り口発信器に発信させる。
【0095】
ナビゲーション装置2は、乗り口発信器から信号を受信することで、歩行者がエスカレーターの搬送路に乗ったことを検出する。そして、上述した実施形態と同様に、乗り口発信器から取得したエスカレーターの搬送情報を用いて移動距離を算出する。この際、エスカレーターの傾斜角度「φ」も加味してユーザーの移動距離を算出する。
【0096】
なお、前述したように、エスカレーターの降り口位置に降り口発信器を配置し、降り口発信器から発信信号を受信することで、歩行者がエスカレーターの搬送路から降りたことを検出することとしてもよい。
【0097】
7−4.発信器を用いない構成
人間用搬送機器の乗り口位置や降り口位置に発信器を設置することなく、人間用搬送機器にユーザーが乗った際の位置算出を実現することも可能である。
【0098】
この場合は、人間用搬送機器毎の搬送情報を記憶したデータベースをナビゲーション装置2に記憶させておく。例えば、図12に示すように、人間用搬送機器が設置されている場所(駅や空港、ショッピングモールなど)と対応付けて、当該人間用搬送機器の搬送情報を記憶した人間用搬送機器データ611を蓄積したデータベースを生成する。図12の人間用搬送機器データ611では、人間用搬送機器の設置場所6111と対応付けて、乗り口位置6112と、降り口位置6113と、搬送速度6114と、搬送方向6115と、搬送路長6116が記憶されている。
【0099】
ナビゲーション装置2は、所定の測位演算を行ってユーザーの位置を算定する。例えば、GPS(Global Positioning System)に代表される衛星測位システムを利用した測位演算を行ってもよいし、上述した実施形態のように歩行検出処理の結果を用いて測位演算を行ってもよい。そして、ナビゲーション装置2は、測位演算により算定したユーザーの位置と、地図データ602とを照査して、何れかの人間用搬送機器の乗り口位置6113にユーザーが位置しているか否かを判定する。そして、肯定判定された場合は、ユーザーが位置している乗り口位置6113に対応付けられた人間用搬送機器データ611を読み出し、読み出した人間用搬送機器データ611を用いて位置算出を行う。
【0100】
7−5.乗降検出
ユーザーの搬送路の乗降検出を次のように行ってもよい。すなわち、上記と同様に所定の測位演算を行ってユーザーの位置を算定する。そして、算定したユーザーの位置と、人間用搬送機器の乗り口位置や降り口位置とを照合することにより乗降検出を行う。
【0101】
図13は、この場合における乗り降りの検出の説明図であり、人間用搬送機器を上方から俯瞰した図を示している。例えば、人間用搬送機器の乗り口位置を含む所定範囲の領域を進入判定領域として定めておく。図13では、乗り口位置を中心とする矩形領域を進入判定領域とする場合を図示している。
【0102】
ナビゲーション装置2は、測位演算により算定したユーザーの位置が進入判定領域に含まれる、或いは、算定位置を結んだ移動軌跡が進入判定領域に差し掛かったと判定した場合に、ユーザーが人間用搬送機器の搬送路に乗ったものと判定する。
【0103】
同様に、人間用搬送機器の降り口位置を含む所定範囲の領域(例えば図13の矩形領域)を進出判定領域として定めておき、測位演算により算定したユーザーの位置或いは移動軌跡が進出判定領域に差し掛かったか否かを判定することによって、ユーザーが人間用搬送機器の搬送路から降りたことを検出してもよい。
【0104】
7−6.方位センサー
上述した実施形態では、ジャイロセンサーの検出結果に基づいてユーザーの歩行方向を推測するものとして説明したが、地磁気センサーなどの方位センサーをセンサー部40に具備させておき、方位センサーからユーザーの歩行方向を取得してもよい。
【0105】
7−7.センサー部のキャリブレーション
センサー部40に対するキャリブレーション(センサーの更正処理)を所定のタイミングで行い、キャリブレーションされたセンサー部40の検出結果に基づいて歩行検出を行ってもよい。キャリブレーションは、例えば、センサーのゼロ点バイアスやスケールファクターといった誤差パラメーター値を公知の手法により算出し、算出した誤差パラメーター値で検出結果を補正することにより行う。
【0106】
キャリブレーションを行うタイミングとしては、例えば電源投入時のタイミングや所定の時間間隔が経過したタイミング、ユーザーによりキャリブレーションの指示操作がなされたタイミング、温度変化が一定以上生じたタイミング等とすることができる。キャリブレーションされたセンサー部40の検出結果を用いることで、歩行検出の正確性を向上させることができる。
【0107】
7−8.歩行検出及び歩行方向推測
上述した実施形態では、フィルター処理を施した後の上下動の加速度に基づいてユーザーの一歩を検出するものとして説明した。検出の精度は低下する可能性があるが、フィルター処理を施さずに、検出された上下動の加速度そのものに基づいてユーザーの一歩を検出してもよい。また、歩行方向の推測についても同様に、フィルター処理を施さない角速度そのものに基づいてユーザーの歩行方向を推測してもよい。
【符号の説明】
【0108】
1 位置算出システム、 2 ナビゲーション装置、 3 乗り口発信器、 4 降り口発信器、 10 処理部、 20 操作部、 30 表示部、 40 センサー部、 41 加速度センサー、 43 ジャイロセンサー、 50 近距離無線通信部、 60 記憶部、 70 バス
【特許請求の範囲】
【請求項1】
乗り口から降り口に至る搬送路上において歩行可能に人間を搬送する人間用搬送機器の前記搬送路にユーザーが乗った際のユーザーの位置を算出する位置算出方法であって、
前記人間用搬送機器の搬送速度を積分することと、
前記ユーザーの一歩を検出することと、
前記ユーザーの一歩が検出されない場合には前記積分の結果を用いて、一歩が検出された場合には前記積分の結果及び前記一歩の歩幅を用いて、前記搬送路上における前記ユーザーの移動距離を算出することと、
少なくとも前記乗り口の位置と前記移動距離とを用いて前記ユーザーの位置を算出することと、
を含む位置算出方法。
【請求項2】
前記乗り口には、前記乗り口の位置、前記搬送速度、及び、搬送方向を少なくとも含む搬送情報を発信する発信器が設置されており、
前記搬送情報を受信することを更に含み、
前記積分することは、前記受信した搬送情報に含まれる搬送速度を積分することであり、
前記位置を算出することは、前記受信した搬送情報に含まれる乗り口の位置及び搬送方向と、前記移動距離とを用いて前記ユーザーの位置を算出することである、
請求項1に記載の位置算出方法。
【請求項3】
前記発信器は、前記搬送路の長さを前記搬送情報に更に含めて発信しており、
前記移動距離が前記受信した搬送情報に含まれる前記搬送路の長さに達した場合に、前記ユーザーが前記搬送路から降りたことを検出することを更に含む、
請求項2に記載の位置算出方法。
【請求項4】
前記降り口には、降り口に到来した旨の降り口情報を発信する降り口発信器が設置されており、
前記降り口情報を受信した場合に、前記ユーザーが前記搬送路から降りたことを検出することを更に含む、
請求項1〜3の何れか一項に記載の位置算出方法。
【請求項5】
前記搬送路上に位置するか否かに関わらず、所定の測位演算を行って前記ユーザーの位置を算定することと、
乗り口の位置、搬送速度及び搬送方向を少なくとも含む搬送情報を人間用搬送機器毎に記憶した記憶部から、前記ユーザーが乗った前記人間用搬送機器の搬送情報を前記算定された位置に基づいて読み出すことと、
を更に含み、
前記積分することは、前記読み出した搬送情報に含まれる搬送速度を積分することであり、
前記位置を算出することは、前記読み出した搬送情報に含まれる乗り口の位置及び搬送方向と、前記移動距離とを用いて前記ユーザーの位置を算出することである、
請求項1に記載の位置算出方法。
【請求項6】
前記人間用搬送機器は、動く歩道又はエスカレーターである、
請求項1〜5の何れか一項に記載の位置算出方法。
【請求項7】
ユーザーの位置を算出する位置算出装置であって、
乗り口から降り口に至る搬送路上において歩行可能に人間を搬送する人間用搬送機器の前記搬送路にユーザーが乗ったことを検出する検出部と、
前記人間用搬送機器の搬送速度を積分する積分部と、
前記ユーザーの一歩を検出する歩行検出部と、
前記歩行判定部による一歩の検出がなされない場合には前記積分部の積分結果を用いて、一歩の検出がなされた場合には前記積分部の積分結果及び前記一歩の歩幅を用いて、前記搬送路上における前記ユーザーの移動距離を算出する移動距離算出部と、
前記検出部による検出がなされた場合に、少なくとも前記乗り口の位置と前記移動距離算出部により算出された移動距離とを用いて前記ユーザーの前記搬送路上の位置を算出する位置算出部と、
を備えた位置算出装置。
【請求項1】
乗り口から降り口に至る搬送路上において歩行可能に人間を搬送する人間用搬送機器の前記搬送路にユーザーが乗った際のユーザーの位置を算出する位置算出方法であって、
前記人間用搬送機器の搬送速度を積分することと、
前記ユーザーの一歩を検出することと、
前記ユーザーの一歩が検出されない場合には前記積分の結果を用いて、一歩が検出された場合には前記積分の結果及び前記一歩の歩幅を用いて、前記搬送路上における前記ユーザーの移動距離を算出することと、
少なくとも前記乗り口の位置と前記移動距離とを用いて前記ユーザーの位置を算出することと、
を含む位置算出方法。
【請求項2】
前記乗り口には、前記乗り口の位置、前記搬送速度、及び、搬送方向を少なくとも含む搬送情報を発信する発信器が設置されており、
前記搬送情報を受信することを更に含み、
前記積分することは、前記受信した搬送情報に含まれる搬送速度を積分することであり、
前記位置を算出することは、前記受信した搬送情報に含まれる乗り口の位置及び搬送方向と、前記移動距離とを用いて前記ユーザーの位置を算出することである、
請求項1に記載の位置算出方法。
【請求項3】
前記発信器は、前記搬送路の長さを前記搬送情報に更に含めて発信しており、
前記移動距離が前記受信した搬送情報に含まれる前記搬送路の長さに達した場合に、前記ユーザーが前記搬送路から降りたことを検出することを更に含む、
請求項2に記載の位置算出方法。
【請求項4】
前記降り口には、降り口に到来した旨の降り口情報を発信する降り口発信器が設置されており、
前記降り口情報を受信した場合に、前記ユーザーが前記搬送路から降りたことを検出することを更に含む、
請求項1〜3の何れか一項に記載の位置算出方法。
【請求項5】
前記搬送路上に位置するか否かに関わらず、所定の測位演算を行って前記ユーザーの位置を算定することと、
乗り口の位置、搬送速度及び搬送方向を少なくとも含む搬送情報を人間用搬送機器毎に記憶した記憶部から、前記ユーザーが乗った前記人間用搬送機器の搬送情報を前記算定された位置に基づいて読み出すことと、
を更に含み、
前記積分することは、前記読み出した搬送情報に含まれる搬送速度を積分することであり、
前記位置を算出することは、前記読み出した搬送情報に含まれる乗り口の位置及び搬送方向と、前記移動距離とを用いて前記ユーザーの位置を算出することである、
請求項1に記載の位置算出方法。
【請求項6】
前記人間用搬送機器は、動く歩道又はエスカレーターである、
請求項1〜5の何れか一項に記載の位置算出方法。
【請求項7】
ユーザーの位置を算出する位置算出装置であって、
乗り口から降り口に至る搬送路上において歩行可能に人間を搬送する人間用搬送機器の前記搬送路にユーザーが乗ったことを検出する検出部と、
前記人間用搬送機器の搬送速度を積分する積分部と、
前記ユーザーの一歩を検出する歩行検出部と、
前記歩行判定部による一歩の検出がなされない場合には前記積分部の積分結果を用いて、一歩の検出がなされた場合には前記積分部の積分結果及び前記一歩の歩幅を用いて、前記搬送路上における前記ユーザーの移動距離を算出する移動距離算出部と、
前記検出部による検出がなされた場合に、少なくとも前記乗り口の位置と前記移動距離算出部により算出された移動距離とを用いて前記ユーザーの前記搬送路上の位置を算出する位置算出部と、
を備えた位置算出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−215106(P2011−215106A)
【公開日】平成23年10月27日(2011.10.27)
【国際特許分類】
【出願番号】特願2010−85831(P2010−85831)
【出願日】平成22年4月2日(2010.4.2)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成23年10月27日(2011.10.27)
【国際特許分類】
【出願日】平成22年4月2日(2010.4.2)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]