
位置補正データ生成装置、位置標定装置、ユーザインタフェース装置、位置補正データ生成装置の位置補正データ生成方法、位置標定装置の位置標定方法、ユーザインタフェース装置の情報処理方法、位置補正データ生成プログラム、位置標定プログラムおよびユーザインタフェースプログラム
【課題】GPS衛星が不可視である環境下で高精度に位置を標定する。
【解決手段】標定装置記憶部290は補正対象の計測経路データ291と計測経路データ291に対応する計測点群データ292(対象点群データ)と参照する計測点群データ292(参照点群データ)とを記憶する。計測経路データ291は計測車両の座標値を含むデータである。計測点群データ292は計測車両を用いて計測した計測領域内の計測点の座標値を含むデータである。対象領域決定部233は計測領域内の特定領域を決定する。領域座標値算出部241は特定領域の対象点群データに基づいて特定領域の第一の領域座標値293を算出し、特定領域の参照点群データに基づいて特定領域の第二の領域座標値293を算出する。位置補正部242は第一の領域座標値293と第二の領域座標値293との差(座標値補正量294)に基づいて補正対象の計測経路データ291を補正する。
【解決手段】標定装置記憶部290は補正対象の計測経路データ291と計測経路データ291に対応する計測点群データ292(対象点群データ)と参照する計測点群データ292(参照点群データ)とを記憶する。計測経路データ291は計測車両の座標値を含むデータである。計測点群データ292は計測車両を用いて計測した計測領域内の計測点の座標値を含むデータである。対象領域決定部233は計測領域内の特定領域を決定する。領域座標値算出部241は特定領域の対象点群データに基づいて特定領域の第一の領域座標値293を算出し、特定領域の参照点群データに基づいて特定領域の第二の領域座標値293を算出する。位置補正部242は第一の領域座標値293と第二の領域座標値293との差(座標値補正量294)に基づいて補正対象の計測経路データ291を補正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、車両の位置を標定するための位置補正データ生成装置、位置標定装置、ユーザインタフェース装置、位置補正データ生成装置の位置補正データ生成方法、位置標定装置の位置標定方法、ユーザインタフェース装置の情報処理方法、位置補正データ生成プログラム、位置標定プログラムおよびユーザインタフェースプログラムに関するものである。
【背景技術】
【0002】
現在、測量分野において移動しながら三次元の計測を行うモービルマッピングシステム(MMS:Mobile Mapping System)が普及しつつある。
【0003】
MMSは、GPS衛星(GPS:Global Positioning System)が可視である環境下では地図情報レベル500(縮尺1/500)という高精度な計測が可能である。
しかし、高架下や高層ビルが林立する地域など、GPS衛星が不可視である環境下においては、IMU(Inertial Measurement Unit)のデータだけを用いて位置の標定を行うため、計測精度が悪化してしまう。そのため、位置を高精度に補正する手法が求められる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−264983号公報
【特許文献2】国際公開2008/099915号パンフレット
【非特許文献】
【0005】
【非特許文献1】石川貴一郎,村石隆介,天野嘉春,橋詰匠,島嘉宏,瀧口純一,清水聡,“モービルマッピングシステムと三次元空間情報管理システムを用いた実都市空間モデリング&ウォークスルーシステム”,第13回ロボティクスシンポジア,pp.186−191,2008
【非特許文献2】石川貴一郎,高野雅史,梶原尚幸,瀧口純一,天野嘉春,橋詰匠,“道路地物の測量値とGPS/IMUを複合した自己位置標定の研究”,ロボティクスメカトロニクス講演会2009,1A2−B20,2009.6
【非特許文献3】Gabriel Taubin,“Estimation of Planar Curves,Surfaces,and Nonplanar Space Curves Defined by Implicit Equations with Applications to Edge and Range Image Segmentation”,IEEE Transactions ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE,VOL.13,NO.11 NOVEMBER 1991,pp1115−1138
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、例えば、GPS衛星が不可視である環境下においても高精度に位置を標定できるようにすることを目的とする。
【課題を解決するための手段】
【0007】
本発明の位置標定装置は、
計測機器を搭載した移動体の座標値を移動体座標値として含む移動体データを記憶する移動体データ記憶部と、
前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む計測点データを記憶する計測点データ記憶部と、
前記計測領域内の複数の地点それぞれの座標値を参照点の参照点座標値として含むデータを参照点データとして記憶する参照点データ記憶部と、
前記計測領域内の特定領域を指定する領域指定を入力機器から入力する領域指定入力部と、
前記領域指定入力部が入力した領域指定と前記計測点データ記憶部に記憶される計測点データとに基づいて前記特定領域の特定地点の座標値を第一の領域座標値として算出し、前記領域指定入力部が入力した領域指定と前記参照点データ記憶部に記憶される参照点データとに基づいて前記特定領域の前記特定地点の座標値を第二の領域座標値として算出する領域座標値算出部と、
前記領域座標値算出部によって算出された第一の領域座標値と第二の領域座標値との差を座標値誤差として算出し、算出した座標値誤差を含んだデータを前記移動体データに含まれる移動体座標値の補正に用いる補正データとして生成する補正データ生成部とを備える。
【発明の効果】
【0008】
本発明によれば、例えば、GPS衛星が不可視である環境下においても高精度に位置を標定することができる。
【図面の簡単な説明】
【0009】
【図1】実施の形態1における計測車両100の外観図。
【図2】実施の形態1における衛星可視環境および衛星不可視環境の一例を示す図。
【図3】実施の形態1における位置標定装置200の機能構成図。
【図4】実施の形態1における位置標定装置200の位置標定方法を示すフローチャート。
【図5】実施の形態1における経路地点選択画面201と参照点群データ選択画面202とを示す図。
【図6】実施の形態1におけるカメラ画像選択画面203を示す図。
【図7】実施の形態1における計測点群確認画面204を示す図。
【図8】実施の形態1における点群投影画像205Aの生成方法を示す図。
【図9】実施の形態1における領域指定画面205の部分拡大図。
【図10】実施の形態1における領域座標値293(高さを除く座標値)を算出する方法の一例を示す図。
【図11】実施の形態1における領域座標値293(高さの座標値)を算出する方法の一例を示す図。
【図12】実施の形態1における位置標定装置200のハードウェア資源の一例を示す図。
【発明を実施するための形態】
【0010】
実施の形態1.
衛星可視環境で計測したレーザスキャナの計測データと衛星不可視環境で計測したレーザスキャナの計測データとに基づいて、衛星不可視環境で測位した位置データを補正する形態について説明する。
【0011】
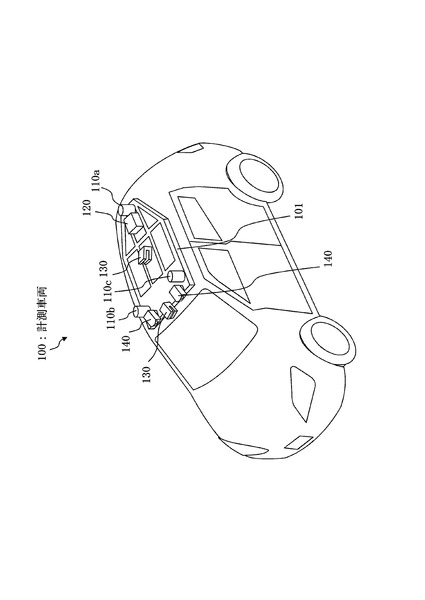
図1は、実施の形態1における計測車両100の外観図である。
実施の形態1における計測車両100について、図1に基づいて説明する。
【0012】
計測車両100(移動体の一例)はMMS(モービルマッピングシステム)で使用する車両である。MMSとは、計測車両100で計測地域を走行し、走行した道路周辺の地物(建物、標識、白線など)の三次元の座標値を計測するシステムである。
以下、MMSの計測を「道路周辺計測」という。
【0013】
計測車両100は、3台のGNSS受信機110と、IMU120と、オドメトリ(図示省略)と、2台のレーザスキャナ130と、2台のカメラ140とを備える。
これらのセンサ(オドメトリを除く)は、計測車両100の天部に設けた天板101に取り付けられる。
【0014】
GNSS受信機110は、GNSS(Global Navigation Satellite Systems)の衛星から測位信号を受信するアンテナを備える。GPS(Global Positioning System)はGNSSの一例である。
GNSS受信機110は、受信した測位信号に基づいて衛星との疑似距離、測位信号を搬送した搬送波の位相および三次元の座標値を算出する。
例えば、3台のGNSS受信機110のうち2台のGNSS受信機110b・cは天板101の前方の左右の端部に設置し、残りの1台のGNSS受信機110aは天板101の後方の真ん中に設置する。
【0015】
IMU120(Inertial Measurement Unit)は、3軸方向の角速度を計測するジャイロセンサと、3軸方向の加速度を計測する加速度センサとを備える。
【0016】
オドメトリは、計測車両100の走行速度(車速)を計測する。
【0017】
レーザスキャナ130は、計測車両100の幅方向に放射角度を変えながらレーザ光を放射し、放射先に位置する地物に反射したレーザ光を受光する。
レーザスキャナ130は、レーザ光を放射してから受光するまでの時刻を計測し、計測した時刻に光速を乗算して地物との距離を算出する。
例えば、2台のレーザスキャナ130のうち一方のレーザスキャナ130は天板101の前方に斜め下向きに設置し、他方のレーザスキャナ130は天板101の中央部分に斜め上向きに設置する。
【0018】
前方カメラ140は、計測車両100の前方を撮像する。
2台の前方カメラ140のうち一方の前方カメラ140は天板101の前方に正面に向けて設置し、他方の前方カメラ140は天板101の前方に斜め下向きに設置する。
【0019】
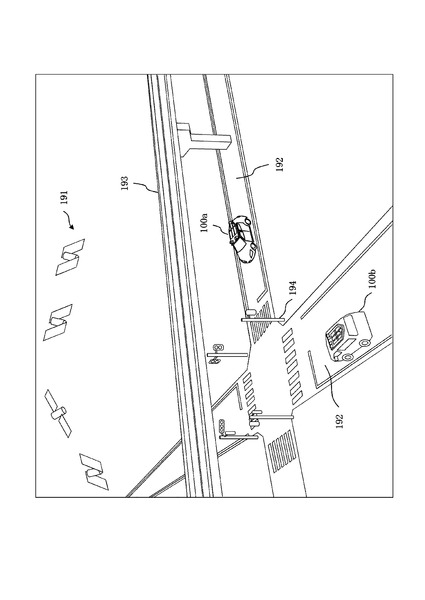
図2は、実施の形態1における衛星可視環境および衛星不可視環境の一例を示す図である。
図2の計測車両100aのように高速道路193の高架下にある一般道192を通行する場合、高速道路193によってGNSS衛星191が遮蔽されるため、計測車両100aはGNSS衛星191から測位信号を受信することができない。
このように、GNSS衛星191から測位信号を受信することができない環境を「衛星不可視環境」という。高層ビルが密集する地域なども衛星不可視環境に該当する。
【0020】
一方、計測車両100bのように高架下以外の一般道192を通行する場合、計測車両100bはGNSS衛星191から測位信号を受信することができる。
このように、GNSS衛星191から測位信号を受信することができる環境を「衛星可視環境」という。周囲の建物の高さが低く、また建物が密集していない地域なども衛星可視環境に該当する。
【0021】
衛星可視環境では、GNSS衛星191の測位信号を観測した観測データに基づいてIMUを用いた測位データを補正することにより、高精度な測位データを得ることができる。
しかし、衛星不可視環境では、IMUを用いた測位データを補正することができないため、高精度な測位データを得ることができない。
【0022】
そこで、実施の形態1における位置標定装置は、衛星可視環境で計測したレーザスキャナの計測データと衛星不可視環境で計測したレーザスキャナの計測データとのそれぞれから共通するランドマーク194(例えば、信号機の柱)の計測データを抽出する。
位置標定装置は、抽出したランドマーク194の計測データに基づいて衛星不可視環境の測位データの補正量を算出し、算出した補正量を用いて衛星不可視環境の測位データを補正する。これにより、衛星不可視環境の高精度な測位データを得ることができる。
【0023】
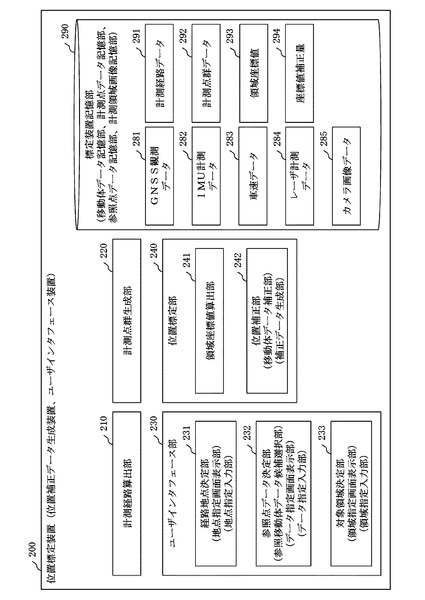
図3は、実施の形態1における位置標定装置200の機能構成図である。
実施の形態1における位置標定装置200の機能構成について、図3に基づいて説明する。
【0024】
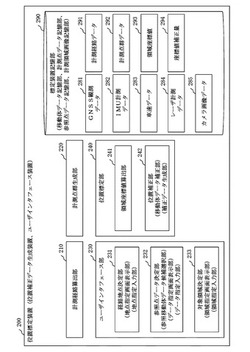
位置標定装置200(位置補正データ生成装置、位置標定装置、ユーザインタフェース装置の一例)は、計測経路算出部210、計測点群生成部220、ユーザインタフェース部230、位置標定部240および標定装置記憶部290を備える。
【0025】
標定装置記憶部290(移動体データ記憶部、計測点データ記憶部、参照点データ記憶部、計測領域画像記憶部の一例)は、位置標定装置200で使用するデータを記憶する。
GNSS観測データ281、IMU計測データ282、車速データ283、レーザ計測データ284およびカメラ画像データ285は、標定装置記憶部290に記憶されるデータの一例である。
計測経路データ291、計測点群データ292、領域座標値293および座標値補正量294は、標定装置記憶部290に記憶されるデータの一例である。
【0026】
GNSS観測データ281は、計測車両100(図1参照)のGNSS受信機110によって得られるデータである。
例えば、GNSS観測データ281は、測位信号を受信した時刻(観測時刻)に対応付けて疑似距離と搬送波位相と三次元座標値とを示す。
【0027】
IMU計測データ282は、計測車両100のIMU120によって得られるデータである。
例えば、IMU計測データ282は、計測時刻に対応付けて3軸方向の角速度と3軸の加速度とを示す。
【0028】
車速データ283は、計測車両100のオドメトリによって得られるデータである。
例えば、車速データ283は、計測時刻に対応付けて計測車両100の車速を示す。
【0029】
レーザ計測データ284は、計測車両100のレーザスキャナ130によって得られるデータである。
例えば、レーザ計測データ284は、計測時刻に対応付けて地物との距離(計測距離)とレーザ光の放射角度(計測角度)とを示す。また、レーザ計測データ284は、計測距離と計測角度とに基づいた座標値であって、レーザスキャナ130の取り付け位置を原点とする二次元(または三次元)の座標値を示してもよい。
【0030】
カメラ画像データ285は、計測車両100のカメラ140によって得られるデータである。
例えば、カメラ画像データ285は、カメラ140によって撮像されたカメラ画像(計測領域画像の一例)を撮像時刻に対応付けて示す。
【0031】
計測経路データ291(移動体データの一例)は、GNSS観測データ281とIMU計測データ282と車速データ283とに基づいて計測経路算出部210によって生成されるデータである。計測経路データ291は道路周辺計測毎に生成される。
計測経路データ291は、計測時刻毎に計測車両100の三次元の座標値および姿勢の角度を世界座標系の値で示す。ENU座標系(East−North−Up)は世界座標系の一例であり、(緯度,経度,高度)は世界座標系の座標値の一例である。以下、計測車両100の三次元の座標値を「車両座標値」といい、計測車両100の三次元の姿勢の角度を「車両姿勢角」という。
計測経路データ291は、さらに、計測時刻毎に計測車両100の座標値(及び/または姿勢角)に含まれる予測誤差を示す。例えば、後述するカルマンフィルタ処理の補正量を予測誤差として計測経路データ291に設定してもよい。但し、カルマンフィルタ処理の補正量以外の値を予測誤差にしても構わない。例えば、可視衛星(受信することができた測位信号に対応するGNSS衛星)の数に応じた所定の値を予測誤差にしても構わない。
【0032】
計測点群データ292(計測点データ、参照点データの一例)は、レーザ計測データ284に基づいて計測点群生成部220によって生成されるデータである。計測点群データ292は道路周辺計測毎に生成される。
計測点群データ292は、レーザ光を反射した地点(以下、計測点という)毎に三次元の座標値を世界座標系の値で示す。以下、計測点の三次元の座標値を「計測点座標値」という。
【0033】
領域座標値293は、計測点群データ292に基づいて位置標定部240によって算出される。
領域座標値293は、ランドマーク194の三次元の座標値を世界座標系の値で示す。
【0034】
座標値補正量294は、衛星可視環境の領域座標値293と衛星不可視環境の領域座標値293とに基づいて位置標定部240によって算出される。
座標値補正量294は、衛星不可視環境の計測経路データ291(後述する対象経路データ291A)の補正に用いられる。
【0035】
計測経路算出部210は、GNSS観測データ281とIMU計測データ282と車速データ283とに基づいて所定の航法処理によって計測車両100の各時刻の三次元の座標値および姿勢角を算出し、計測経路データ291を生成する。
【0036】
例えば、計測経路算出部210は、GPS−Gyro/IMU複合航法(GPS/IMU複合航法ともいう)によって計測車両100の各時刻の三次元の座標値および姿勢角を算出し、計測経路データ291を生成する。
【0037】
例えば、計測経路算出部210は、以下のように計測経路データ291を生成する。
計測経路算出部210は、IMU計測データ282に含まれる三次元の加速度と三次元の角速度とを用いてストラップダウン演算を行い、計測車両100の座標値と姿勢角と速度とを算出する。
計測経路算出部210は、GNSS観測データ281に含まれる座標値、疑似距離または搬送波位相に基づいて航法処理を行い、計測車両100の座標値を算出する。
計測経路算出部210は、GNSS観測データ281に含まれる座標値に基づいて第一のGNSS受信機110aから第二のGNSS受信機110bへの基線ベクトルと第一のGNSS受信機110aから第三のGNSS受信機110cへの基線ベクトルとを算出する。計測経路算出部210は、二つの基線ベクトルに基づいて計測車両100の姿勢角を算出する。
計測経路算出部210は、航法処理で算出した座標値とストラップダウン演算で算出した座標値との差を座標値残差として算出する。計測経路算出部210は、基線ベクトルに基づいて算出した姿勢角とストラップダウン演算で算出した姿勢角との差を姿勢角残差として算出する。計測経路算出部210は、車速データ283に含まれる速度とストラップダウン演算で算出した速度との差を速度残差として算出する。
計測経路算出部210は、座標値残差と姿勢角残差と速度残差との少なくともいずれかを入力として所定のカルマンフィルタ処理を行い、座標値の補正量と姿勢角の補正量とを算出する。
計測経路算出部210は、ストラップダウン演算で算出した座標値に座標値の補正量を加算して座標値を補正し、ストラップダウン演算で算出した姿勢角に姿勢角の補正量を加算して姿勢角を補正し、補正した座標値と姿勢角とを設定して計測経路データ291を生成する。
【0038】
但し、計測経路算出部210は、任意の航法処理によって計測車両100の各時刻の座標値と姿勢角とを算出し、計測経路データ291を生成してもよい。
【0039】
計測点群生成部220は、計測経路データ291とレーザ計測データ284とに基づいて計測点群データ292を生成する。
【0040】
レーザ光を反射した計測点の三次元の座標値は、レーザスキャナ130の計測時刻の位置からレーザ光の放射方向へ計測距離だけ離れた地点の座標値として算出される。
レーザスキャナ130の計測時刻の位置は、計測車両100の計測時刻の位置からレーザスキャナ130の取り付け位置の座標値だけ移動した地点の座標値によって示される。
レーザ光の放射方向は、計測車両100の姿勢角からレーザスキャナ130の取り付け角度だけ傾けた角度によって示される。
レーザスキャナ130の取り付け位置の座標値および取り付け角度を設定したレーザ外部パラメータは標定装置記憶部290に予め記憶しておく。
【0041】
例えば、計測点群データ292の生成方法は特許文献2に開示されている。
【0042】
ユーザインタフェース部230は、経路地点決定部231と参照点データ決定部232と対象領域決定部233とを備える。
【0043】
経路地点決定部231(地点指定画面表示部、地点指定入力部の一例)は、複数の計測経路データ291(移動体データの一例)のうち予測誤差が所定の誤差閾値より大きい計測経路データ291を補正対象の対象経路データ291A(対象移動体データの一例)として選択する。
経路地点決定部231は、選択した対象経路データ291Aの予測誤差に基づいて、対象経路データ291Aの予測誤差を表す誤差グラフを含んだ画面を地点指定画面(後述する経路地点選択画面201)として表示する(地点指定画面表示処理)。
【0044】
経路地点決定部231は、地点指定画面に対して計測経路内の特定地点(後述する経路地点)を指定する地点指定を入力機器から入力する(地点指定入力処理)。
【0045】
参照点データ決定部232(参照移動体データ候補選択部、データ指定画面表示部、データ指定入力部の一例)は、経路地点決定部231が入力した地点指定に基づいて特定地点から所定範囲内に位置する地点の車両座標値(移動体座標値の一例)を含んだ複数の計測経路データ291を参照経路データ候補(参照移動体データ候補の一例)として選択する(参照移動体データ候補選択処理)。
【0046】
参照点データ決定部232は、複数の計測経路データ291それぞれの車両座標値と予測誤差とを表す画面をデータ指定画面(後述する参照点群データ選択画面202)として表示する(データ指定画面表示処理)。
【0047】
例えば、参照点データ決定部232は、複数の計測経路データ291に基づいて計測車両100(移動体の一例)の計測経路を表す経路グラフを含んだ画面をデータ指定画面として表示する。
【0048】
例えば、参照点データ決定部232は、計測経路の予測誤差の大きさによって色彩が異なる経路グラフを含んだデータ指定画面を表示する。
【0049】
例えば、参照点データ決定部232は、対象経路データの経路グラフと参照経路データ候補の経路グラフとをデータ指定画面に表示する。
【0050】
参照点データ決定部232は、複数の計測点群データ292(計測点データの一例)のうち対象点群データ292A(特定の計測点データの一例)以外の計測点群データ292を参照点群データ292B(参照点データの一例)として指定するデータ指定を入力機器から入力する(データ指定入力処理)。
【0051】
参照点データ決定部232は、データ指定画面に対して参照点群データ292Bに対応する移動体データを指定するデータ指定を入力する。
【0052】
対象領域決定部233(領域指定画面表示部、領域指定入力部の一例)は、対象点群データ292Aに基づいて複数の計測点を描画した画面を計測点領域指定画面(後述する領域指定画面205)として表示する。
対象領域決定部233は、参照点群データ292Bに基づいて複数の参照点を描画した画面を参照点領域指定画面(後述する領域指定画面205)として表示する(領域指定画面表示処理)。
【0053】
例えば、対象領域決定部233は、第一のカメラ画像(第一の計測領域画像の一例)に重ねて複数の計測点を描画して計測点領域指定画面を表示する。
また、対象領域決定部233は、第二のカメラ画像(第二の計測領域画像の一例)に重ねて複数の参照点を描画して参照点領域指定画面を表示する。
【0054】
対象領域決定部233は、計測領域内の特定領域(後述する対象領域)を指定する領域指定を入力機器から入力する(領域指定入力処理)。
【0055】
例えば、対象領域決定部233は、計測点領域指定画面に対して特定領域に対応する部分を計測点領域(後述する第一の対象領域)として指定する第一の領域指定を入力する。
また、対象領域決定部233は、参照点領域指定画面に対して特定領域に対応する部分を参照点領域(後述する第二の対象領域)として指定する第二の領域指定を入力する。
【0056】
位置標定部240は、領域座標値算出部241と位置補正部242とを備える。
【0057】
領域座標値算出部241(領域座標値算出部の一例)は、対象領域決定部233が入力した領域指定と対象点群データ292Aとに基づいて特定領域の特定地点の座標値を第一の領域座標値293として算出する。
領域座標値算出部241は、対象領域決定部233が入力した領域指定と参照点群データ292Bとに基づいて特定領域の特定地点の座標値を第二の領域座標値293として算出する(領域座標値算出処理)。
【0058】
例えば、領域座標値算出部241は、対象点群データ292Aに含まれる計測点座標値のうち特定領域の複数の計測点それぞれの計測点座標値に基づいて第一の領域座標値293を算出する。
また、領域座標値算出部241は、参照点群データ292Bに含まれる参照点座標値(計測点座標値)のうち特定領域の複数の参照点それぞれの参照点座標値に基づいて第二の領域座標値293を算出する。
【0059】
例えば、領域座標値算出部241は、特定領域の中心の地点の座標値として第一の領域座標値293と第二の領域座標値293とを算出する。
【0060】
例えば、領域座標値算出部241は、特定の立体物(ランドマーク194)の表面を計測した複数の計測点座標値に基づいて、特定の立体物の断面中心の座標値を第一の領域座標値293として算出する。
また、領域座標値算出部241は、特定の立体物の表面を計測した複数の参照点座標値に基づいて特定の立体物の断面中心の座標値を第二の領域座標値293として算出する。
【0061】
例えば、領域座標値算出部241は、特定の立体物の断面中心の座標値のうち高さを除いた二次元の座標値を第一の領域座標値293に含まれる二次元座標値として算出する。
また、領域座標値算出部241は、特定の立体物の計測点座標値を除いた残りの計測点座標値に基づいて特定の立体物の位置する地点の地面の高さを第一の領域座標値293に含まれる高さの座標値として算出する。
【0062】
例えば、領域座標値算出部241は、第一の領域指定によって指定される計測点領域に描画された複数の計測点それぞれの計測点座標値に基づいて第一の領域座標値293を算出する。
また、領域座標値算出部241は、第二の領域指定によって指定される参照点領域に描画された複数の参照点それぞれの参照点座標値に基づいて第二の領域座標値293を算出する。
【0063】
例えば、領域座標値算出部241は、対象点群データ292Aに基づいて第一の領域座標値293を算出する。
また、領域座標値算出部241は、参照点群データ292Bに基づいて第二の領域座標値293を算出する。
【0064】
位置補正部242(補正データ生成部、移動体データ補正部の一例)は、領域座標値算出部241によって算出された第一の領域座標値293と第二の領域座標値293との差を座標値補正量294(座標値誤差の一例)として算出する。
位置補正部242は、算出した座標値補正量294に基づいて計測経路データ291に含まれる車両座標値を補正する(移動体データ補正処理)。
【0065】
但し、実施の形態1で説明する位置標定装置200を1台の装置ではなく複数台の装置を用いて構成しても構わない。
例えば、位置補正部242は、座標値補正量294を含んだ補正データを生成し、生成した補正データを所定の補正装置へ送信する。補正装置は、位置標定装置200から補正データを受信し、受信した補正データに含まれる座標値補正量294に基づいて計測経路データ291に含まれる車両座標値を補正する。この場合、補正装置は、計測経路データ291およびその他の必要なデータを予め記憶部に記憶し、又は位置標定装置200から受信する。
【0066】
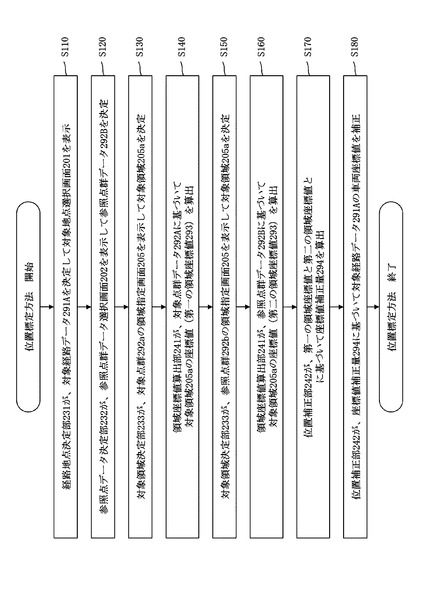
図4は、実施の形態1における位置標定装置200の位置標定方法を示すフローチャートである。
実施の形態1における位置標定装置200の位置標定方法(位置補正データ生成方法、位置標定方法の一例)について、図4に基づいて説明する。
【0067】
まず、位置標定方法の概要について説明する。
【0068】
経路地点決定部231は、対象経路データ291Aを決定して経路地点選択画面201を表示する(S110)。
参照点データ決定部232は、参照点群データ選択画面202を表示して参照点群データ292Bを決定する(S120)。
対象領域決定部233は、対象点群292aの領域指定画面205を表示して対象領域205aを決定する(S130)。
領域座標値算出部241は、対象点群データ292Aに基づいて対象領域205aの座標値(第一の領域座標値293)を算出する(S140)。
対象領域決定部233は、参照点群292bの領域指定画面205を表示して対象領域205aを決定する(S150)。
領域座標値算出部241は、参照点群データ292Bに基づいて対象領域205aの座標値(第二の領域座標値293)を算出する(S160)。
位置補正部242は、第一の領域座標値293と第二の領域座標値293とに基づいて座標値補正量294を算出する(S170)。
位置補正部242は、座標値補正量294に基づいて対象経路データ291Aの車両座標値を補正する(S180)。
【0069】
次に、位置標定方法の詳細について説明する。
【0070】
S110において、経路地点決定部231は、標定装置記憶部290に記憶されている複数の計測経路データ291のうち予測誤差が所定の誤差閾値より大きい計測経路データ291を判定する。
以下、S110で判定する計測経路データ291を「対象経路データ291A」という。
また、対象経路データ291Aに含まれる複数の車両座標値によって表される計測車両100の計測経路を「対象経路」という。
さらに、対象経路の計測点群データ292を「対象点群データ292A」といい、対象経路のカメラ画像データ285を「対象画像データ285A」という。
【0071】
例えば、経路地点決定部231は、計測経路データ291毎に複数の計測点それぞれの予測誤差に基づいて予測誤差の平均値を計測経路データ291の予測誤差として算出し、各計測経路データ291の予測誤差を誤差閾値と比較して対象経路データ291Aを判定する。
また、経路地点決定部231は、計測経路データ291毎に予測誤差が誤差閾値より大きい計測点の個数を算出し、算出した計測点の個数が所定の個数閾値以上である計測経路データ291を対象経路データ291Aとして判定してもよい。
【0072】
次に、経路地点決定部231は、対象経路データ291Aに含まれる複数の車両座標値それぞれの予測誤差を表すグラフを生成し、生成したグラフを含んだ画面を表示する。
以下、予測誤差を表すグラフを「誤差グラフ201a」といい、誤差グラフ201aを含んだ画面を「経路地点選択画面201」という。
【0073】
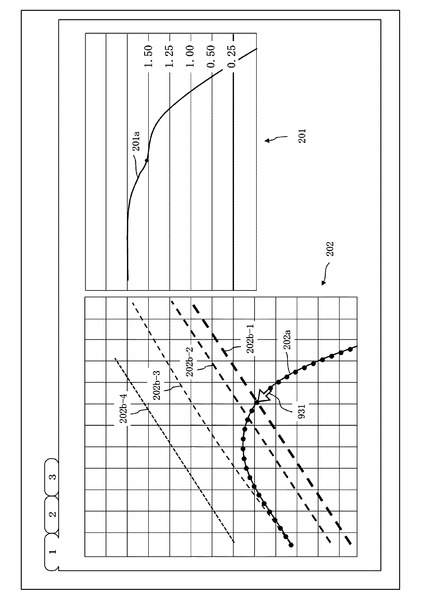
図5は、実施の形態1における経路地点選択画面201と参照点群データ選択画面202とを示す図である。
実施の形態1における経路地点選択画面201について、図5に基づいて説明する。
【0074】
経路地点選択画面201は、対象経路データ291Aの誤差グラフ201aを示している。
誤差グラフ201aは、時刻に対応付けて車両座標値の予測誤差を表している。横軸が時間軸であり、縦軸が車両座標値の予測誤差を表す軸である。
【0075】
誤差グラフ201aは、予測誤差の大きさに応じて色彩を変えてもよい。また、線の太さや種類を変えてもよい。
例えば、予測誤差が3cm(センチメートル)以下の部分は「緑色」の線で表す。
また、予測誤差が5cm以下の部分(3cm以下の部分を除く)は「青色」の線で表し、予測誤差が25cm以下の部分(5cm以下の部分を除く)は「黄色」の線で表し、予測誤差が25cmより大きい部分は「赤色」の線で表す。
【0076】
利用者は、位置標定装置200の入力機器(例えば、キーボードやマウス)を用いて誤差グラフ201aの特定部分を指定する。
例えば、利用者は、マウスを操作してマウスカーソル931で誤差グラフ201aの特定部分を指定する。利用者が指定した部分を丸印で図示している。
【0077】
図4に戻り、S110の説明を続ける。
【0078】
経路地点決定部231は、利用者に指定された特定部分の時刻に対応する車両座標値を誤差グラフ201aから取得する。
以下、誤差グラフ201aから取得される車両座標値であって指定された特定部分に対応する車両座標値が示す地点を「対象経路地点」という。
【0079】
S110の後、S120に進む。
【0080】
S120において、参照点データ決定部232は、標定装置記憶部290に記憶されている複数の計測経路データ291のうち、S110で決定された対象経路地点から所定範囲内に位置する地点の車両座標値を含む複数の計測経路データ291を判定する。但し、対象経路データ291Aは除く。
以下、S120で判定される計測経路データ291を「参照経路データ候補」という。
【0081】
例えば、参照点データ決定部232は、対象経路データ291Aを除く計測経路データ291毎に複数の車両座標値と対象経路地点の車両座標値とを比較する。参照点データ決定部232は、対象経路地点の車両座標値との距離が所定の距離閾値以下である車両座標値を含んだ計測経路データ291を参照経路データ候補として判定する。
【0082】
参照点データ決定部232は、対象経路データ291Aに含まれる複数の車両座標値のうち対象経路地点から所定範囲内に位置する複数の地点それぞれの車両座標値を抽出し、抽出した複数の車両座標値に基づいて計測車両100の計測経路(対象経路)を表す経路グラフを生成する。以下、対象経路データ291Aに基づく経路グラフを「対象経路グラフ202a」という。
参照点データ決定部232は、参照経路データ候補毎に参照経路データ候補に含まれる複数の車両座標値のうち対象経路地点から所定範囲内に位置する複数の地点それぞれの車両座標値を抽出し、抽出した複数の車両座標値に基づいて計測車両100の計測経路(参照経路候補)を表す経路グラフを生成する。以下、参照経路データ候補に基づく経路グラフを「参照経路候補グラフ202b」という。
【0083】
参照点データ決定部232は、対象経路グラフ202aと複数の参照経路候補グラフ202bとを含んだ画面を表示する。
以下、対象経路グラフ202aと複数の参照経路候補グラフ202bとを含んだ画面を「参照点群データ選択画面202」という。
【0084】
図5に、参照点群データ選択画面202の一例を示す。
図5において、参照点群データ選択画面202は、対象経路グラフ202aと複数の参照経路候補グラフ202bとを二次元(高さを除く)で示している。例えば、横軸は計測車両100の進行方向または東方向を表す座標軸(x軸)であり、縦軸は進行方向に対する右方向または北方向を表す座標軸(y軸)である。
【0085】
対象経路グラフ202aは、対象経路を表す実線の他に、カメラ画像が撮像された撮像地点を表す表記(丸印)を示している。
【0086】
複数の参照経路候補グラフ202bは、参照経路候補を表す点線であって予測誤差に応じて太さが異なる点線を示している。点線が太いほど予測誤差は小さい。
但し、経路地点選択画面201の誤差グラフ201aと同様に、予測誤差に応じて参照経路候補グラフ202bの色彩を変えてもよい。また、参照経路候補グラフ202bは、対象経路グラフ202aと同様に実線であってもよい。
【0087】
利用者は、位置標定装置200の入力機器を用いていずれかの参照経路候補グラフ202bを選択する。参照点データ決定部232は、選択される参照経路候補グラフ202bを指定する指定データを入力機器から入力する。
例えば、利用者は、最も予測誤差が小さい参照経路候補グラフ202b−1をマウスカーソル931で選択する。
【0088】
利用者が参照経路候補グラフ202bを選択する際、参照点データ決定部232は、参照経路候補グラフ202bの情報を表示してもよい。
例えば、参照点データ決定部232は、マウスカーソル931が指し示す地点の高度、対象経路地点との高度差、対象経路地点との距離、予測誤差などの情報をポップアップ表示してもよい。
【0089】
さらに、利用者は、対象経路グラフ202aのいずれかの撮像地点を選択する。
例えば、利用者は、対象経路グラフ202aと参照経路候補グラフ202bとが交差する部分の撮像地点をマウスカーソル931で選択する。
【0090】
以下、選択された参照経路候補グラフ202bに対応する参照経路データ候補を「参照経路データ291B」という。
また、参照経路データ291Bに含まれる複数の車両座標値によって表される計測車両100の計測経路を「参照経路」という。
さらに、参照経路の計測点群データ292を「参照点群データ292B」といい、参照経路のカメラ画像データ285を「参照画像データ285B」という。
【0091】
以下、選択された撮像地点を「対象撮像地点」という。
【0092】
図4に戻り、S120の説明を続ける。
【0093】
参照点データ決定部232は、対象撮像地点の撮像時刻の前後に撮像され所定の撮像枚数のカメラ画像を対象経路のカメラ画像データ285(対象画像データ285A)から取得する。
以下、対象画像データ285Aから取得するカメラ画像を「対象画像候補203a」という。
【0094】
参照点データ決定部232は、対象撮像地点から所定範囲内で撮像された所定の撮像枚数のカメラ画像を参照経路のカメラ画像データ285(参照画像データ285B)から取得する。
以下、参照画像データ285Bから取得するカメラ画像を「参照画像候補203b」という。
【0095】
参照点データ決定部232は、対象画像候補203aと参照画像候補203bとを含んだ画面を表示する。
以下、対象画像候補203aと参照画像候補203bとを含んだ画面を「カメラ画像選択画面203」という。
【0096】
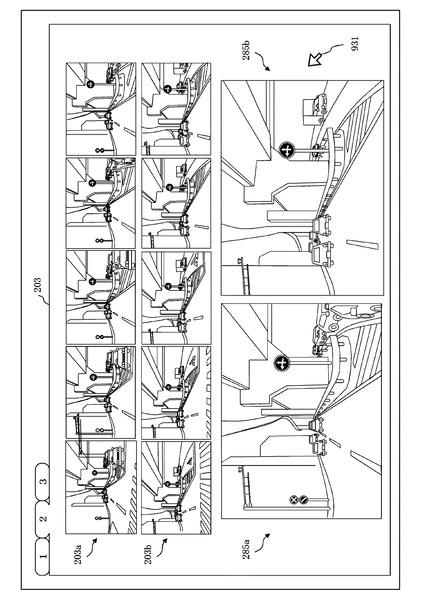
図6は、実施の形態1におけるカメラ画像選択画面203を示す図である。
実施の形態1におけるカメラ画像選択画面203について、図6に基づいて説明する。
【0097】
カメラ画像選択画面203は、上段に対象画像候補203aと参照画像候補203bとを5枚ずつ示している。
【0098】
利用者は、位置標定装置200の入力機器を用いて対象画像候補203aと参照画像候補203bとを一枚ずつ選択する。参照点データ決定部232は、選択される対象画像候補203aを指定する指定データと、選択される参照画像候補203bを指定する指定データとを入力機器から入力する。
例えば、利用者は、ランドマークにしたい地物(例えば、標識やガードレールの柱)が大きく同じように映っている対象画像候補203a−4と参照画像候補203b−4とをマウスカーソル931で選択する。
【0099】
参照点データ決定部232は、選択された対象画像候補203aと参照画像候補203bとをカメラ画像選択画面203の下段に表示する。
以下、選択された対象画像候補203aを「対象画像285a」といい、選択された参照画像候補203bを「参照画像285b」という。
【0100】
図4に戻り、S120の説明を続ける。
【0101】
参照点データ決定部232は、対象点群データ292Aに含まれる複数の計測点座標値のうち対象画像285aの撮像時刻から所定の時刻範囲内の計測時刻に対応する複数の計測点座標値を抽出する。
以下、対象点群データ292Aから抽出する複数の計測点座標値に対応する複数の計測点を「対象点群292a(または抽出対象点群)」という。
【0102】
参照点データ決定部232は、参照点群データ292Bに含まれる複数の計測点座標値のうち参照画像285bの撮像時刻から所定の時刻範囲内の計測時刻に対応する複数の計測点座標値を抽出する。
以下、参照点群データ292Bから抽出する複数の計測点座標値に対応する複数の計測点を「参照点群292b(または抽出参照点群)」という。
【0103】
参照点データ決定部232は、対象点群292aと参照点群292bとを描画した点群画像204aを含む画面を表示する。
以下、対象点群292aと参照点群292bとを描画した点群画像を含む画面を「計測点群確認画面204」という。
【0104】
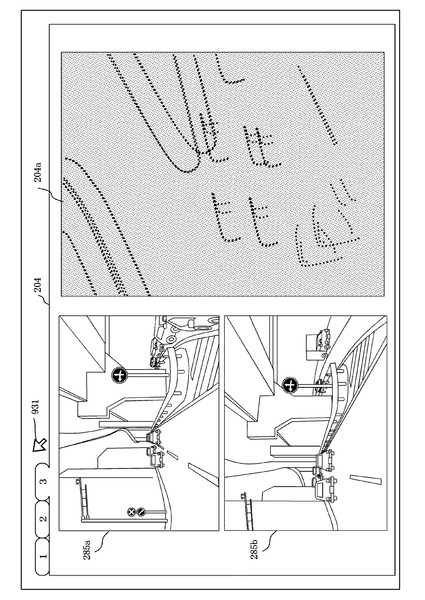
図7は、実施の形態1における計測点群確認画面204を示す図である。
実施の形態1における計測点群確認画面204について、図7に基づいて説明する。
【0105】
計測点群確認画面204は、画面の左側に対象画像285aと参照画像285bとを示し、画面の右側に点群画像204aを示す。
点群画像204aは、対象点群データ292Aに含まれる複数の計測点座標値に基づいて対象点群292aを二次元の平面に点描した点群画像と、参照点群データ292Bに含まれる複数の計測点座標値に基づいて参照点群292bを二次元の平面に点描した点群画像とを重ね合わせた画像である。
図7の点群画像204aに示すように、対象点群292aと参照点群292bとは計測点座標値の誤差によって前後左右にずれて描画される。
対象点群292aと参照点群292bとは、異なる色彩(赤、緑など)や表記(丸、三角など)で描画するとよい。
【0106】
利用者は、対象画像285aと参照画像285bと点群画像204aとを見比べて、ランドマークにしたい地物に対して十分な数の対象点群292aと参照点群292bとが得られていることを確認する。
十分な数の対象点群292aと参照点群292bとが得られていない場合、利用者は、経路地点選択画面201(図5参照)、参照点群データ選択画面202(図6参照)またはカメラ画像選択画面203(図7参照)を切り替える。そして、利用者は、対象経路地点、参照経路、対象撮像地点、対象画像285a、参照画像285bまたはその他の事項を指定し直す。
例えば、利用者は、各画面の左上のタブをマウスカーソル931で選択して画面を切り替える。
【0107】
図4に戻り、位置標定方法の説明をS130から続ける。
【0108】
S130において、対象領域決定部233は、対象点群データ292Aに含まれる複数の計測点座標値に基づいて対象点群292aを対象画像285aに投影し、対象点群292aを投影した対象画像285aを含んだ画面を表示する。
以下、対象点群292aを投影した対象画像285aを対象点群292aの「点群投影画像205A」といい、対象点群292aの点群投影画像を含んだ画面を対象点群292aの「領域指定画面205」という。
【0109】
利用者は、対象点群292aの領域指定画面205に映っている地物のうちランドマーク194にする地物を決定する。
利用者は、位置標定装置200の入力機器を用いてランドマーク194の特定部分を「対象領域205a」として指定する。対象領域決定部233は、対象領域205aを指定する指定データを入力機器から入力する。
【0110】
S130の後、S140に進む。
【0111】
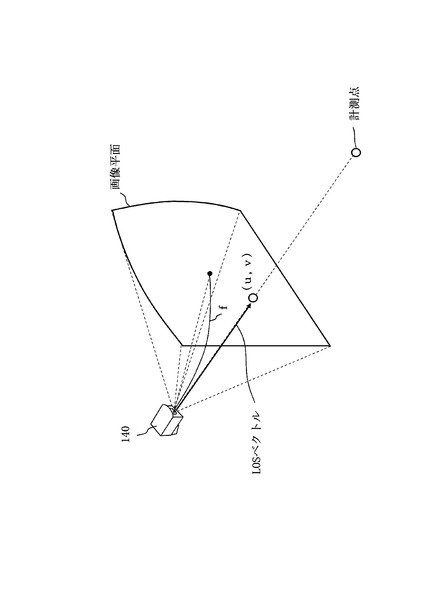
図8は、実施の形態1における点群投影画像205Aの生成方法を示す図である。
実施の形態1における点群投影画像205Aの生成方法について、図8に基づいて説明する。
【0112】
対象領域決定部233は、対象点群292aの計測点(対象点)毎に、対象画像285aを撮像したカメラ140から計測点までの方向を示すLOSベクトル(LOS:Line of Sight)を算出する。
カメラ140の座標値は、対象画像285aの撮像時刻に対応する車両座標値と計測車両100に対するカメラ140の取り付け位置の座標値(Δx,Δy,Δz)とによって定まる。つまり、車両座標値から(Δx,Δy,Δz)だけ移動した地点の座標値がカメラ140の座標値である。
計測点の座標値(計測点座標値)は、対象点群データ292Aに含まれる。
【0113】
対象領域決定部233は、計測点毎に、LOSベクトルと画像平面との交点の座標値を画素座標値(u,v)として算出する。
画像平面は、カメラ140の撮像範囲を表す平面であって、カメラ140の撮像中心からカメラ140の取り付け角度の方向に焦点距離fだけ離れた平面である。
【0114】
対象領域決定部233は、計測点毎に、画素座標値(u,v)で特定される対象画像285aの画素に計測点を描画する。
【0115】
カメラ140の取り付け位置の座標値および取り付け角度を設定したカメラ外部パラメータは標定装置記憶部290に予め記憶しておく。
【0116】
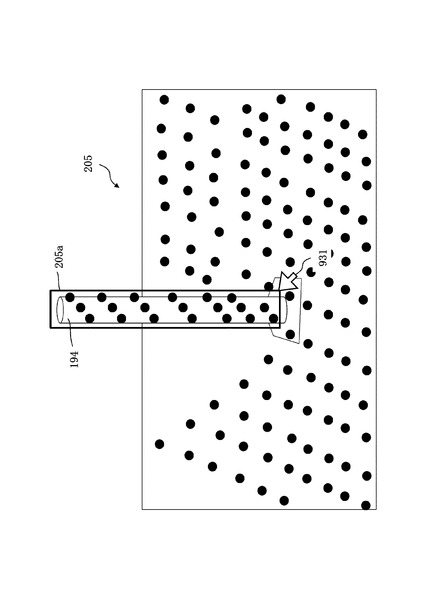
図9は、実施の形態1における領域指定画面205の部分拡大図である。
実施の形態1における対象領域205aの指定方法について、図9に基づいて説明する。
【0117】
例えば、利用者は、信号機、標識またはガードレールの柱のような棒状の立体物をランドマーク194として選択し、選択したランドマーク194の特定部分を対象領域205aとしてマウスカーソル931で指定する。
【0118】
図4に戻り、位置標定方法の説明をS140から続ける。
【0119】
S140において、領域座標値算出部241は、S130で指定された対象領域205aに含まれる対象点群292aの車両座標値を対象点群データ292Aから抽出する。
以下、対象領域205aに含まれる対象点群292aを「対象領域点群205b」という。
【0120】
領域座標値算出部241は、対象領域点群205bの車両座標値に基づいて対象領域205aの座標値を算出する。
以下、S140で算出する対象領域205aの座標値を「第一の領域座標値293」という。
S140の後、S150に進む。
【0121】
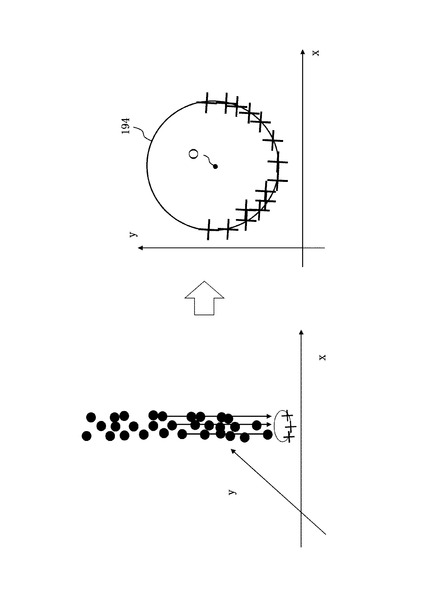
図10は、実施の形態1における領域座標値293(高さを除く座標値)を算出する方法の一例を示す図である。
高さを除く二次元の領域座標値293を算出する方法の一例について、図10に基づいて説明する。
【0122】
対象領域点群205bはランドマーク194の表面を計測した点群である。
したがって、対象領域点群205bの計測点座標値に基づいてランドマーク194の断面形状を得ることができる。
領域座標値算出部241は、ランドマーク194の断面の中心点Oの座標値を二次元の領域座標値293として算出する。
【0123】
例えば、領域座標値算出部241は、非特許文献3が開示するTaubin法を用いて、カーブフィッティング処理(サークルフィッティング処理ともいう)により、円柱状のランドマーク194の断面形状(円または楕円)を算出する。但し、Taubin法以外の方法を用いても構わない。
【0124】
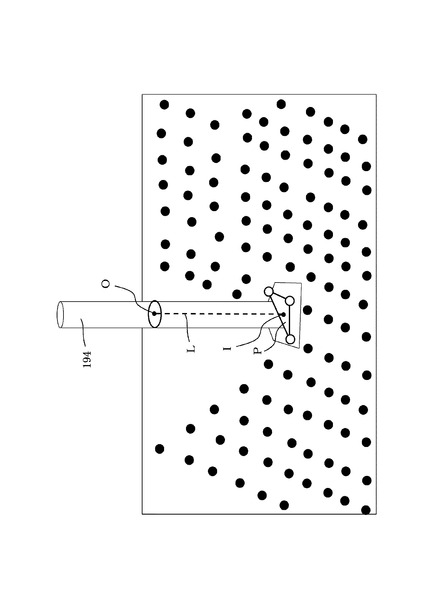
図11は、実施の形態1における領域座標値293(高さの座標値)を算出する方法の一例を示す図である。
領域座標値293の高さを算出する方法の一例について、図11に基づいて説明する。
【0125】
領域座標値算出部241は、対象点群292aを構成する複数の対象点のうちランドマーク194の断面の中心点Oに近い対象点の計測点座標値を対象点群データ292Aから抽出する。但し、対象領域点群205bに含まれる対象点を除く。
領域座標値算出部241は、抽出した対象点の計測点座標値に基づいて領域座標値293の高さを算出する。
【0126】
例えば、領域座標値算出部241は、ランドマーク194の中心点Oの座標値と対象点群292aの計測点座標値とを高さを除く二次元の座標値で比較し、ランドマーク194の中心点Oから近い順に3つの対象点(図中の白抜きの丸印)の計測点座標値を取得する。
次に、領域座標値算出部241は、3つの対象点の計測点座標値(高さを含む三次元の座標値)に基づいて3つの対象点を含む平面Pを生成する。但し、2つの対象点または4つ以上の対象点に基づいて平面Pを生成しても構わない。平面Pはランドマーク194が位置する地点の地面を表す。
そして、領域座標値算出部241は、生成した平面Pとランドマーク194の中心点Oを含んだ垂線Lとの交点Iの座標値を高さを含む三次元の領域座標値293として算出する。
【0127】
図4に戻り、位置標定方法の説明を続ける。
以上のように、S130とS140とは、対象点群292aを対象として対象領域205aの座標値(第一の領域座標値293)を算出する処理である。
以下に説明するS150とS160とは、参照点群292bを対象として対象領域205aの座標値(第二の領域座標値293)を算出する処理である。
【0128】
S150において、対象領域決定部233は、参照点群データ292Bに基づいて参照点群292bを参照画像285bに投影して点群投影画像205Aを生成し、生成した点群投影画像205Aを含んだ領域指定画面205を表示する(S130と同様)。
利用者は、参照点群292bの領域指定画面205に対してランドマーク194の特定部分を対象領域205aとして指定する。このとき、利用者は、S130で指定した対象領域205aに対応するランドマーク194の特定部分を指定する。
対象領域決定部233は、対象領域205aを指定する指定データを入力する。
S150の後、S160に進む。
【0129】
S160において、領域座標値算出部241は、S150で指定された対象領域205aに含まれる参照点群292bの車両座標値を参照点群データ292Bから抽出し、抽出した車両座標値に基づいて第二の領域座標値293を算出する(S140と同様)。
S160の後、S170に進む。
【0130】
S170において、位置補正部242は、S140で算出された第一の領域座標値293とS160で算出された第二の領域座標値293とに基づいて座標値補正量294を算出する。
例えば、位置補正部242は、第一の領域座標値293と第二の領域座標値293との誤差を座標値補正量294として算出する。
S170の後、S180に進む。
【0131】
S180において、位置補正部242は、対象経路データ291Aに含まれる複数の車両座標値を座標値補正量294に基づいて補正する。
【0132】
例えば、位置補正部242は、対象点群292aの車両座標値に座標値補正量294を加算して対象点群292aの車両座標値を補正する。
さらに、位置補正部242は、対象点群292aの補正後の車両座標値と対象経路のIMU計測データ282とを用いてストラップダウン演算を行って残りの車両座標値を更新する。
これにより、衛星不可視環境にある対象経路を高い精度で計測した計測経路データ291(補正後の対象経路データ291A)を得ることができる。
S180により、位置標定方法は終了する。
【0133】
計測点群生成部220は、S180で得られた計測経路データ291を用いて対象経路の計測点群データ292を新たに生成する。
これにより、衛星不可視環境にある対象経路で計測した計測点群データ292を高い精度で得ることができる。また、精度が高い計測点群データ292は、道路周辺の地物を表す三次元モデルとして利用することができる。
【0134】
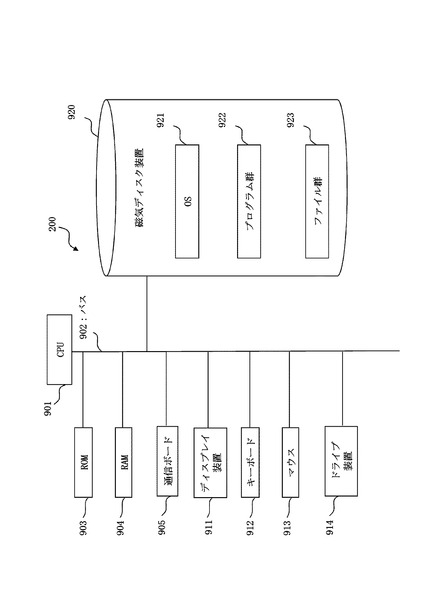
図12は、実施の形態1における位置標定装置200のハードウェア資源の一例を示す図である。
図12において、位置標定装置200は、CPU901(Central Processing Unit)を備えている。CPU901は、バス902を介してROM903、RAM904、通信ボード905、ディスプレイ装置911、キーボード912、マウス913、ドライブ装置914、磁気ディスク装置920などのハードウェアデバイスと接続され、これらのハードウェアデバイスを制御する。ドライブ装置914は、FD(Flexible Disk Drive)、CD(Compact Disc)、DVD(Digital Versatile Disc)などの記憶媒体を読み書きする装置である。
ROM903、RAM904、磁気ディスク装置920およびドライブ装置914は記憶機器の一例である。キーボード912およびマウス913は入力機器の一例である。ディスプレイ装置911は出力機器の一例である。
【0135】
通信ボード905は、有線または無線で、LAN(Local Area Network)、インターネット、電話回線などの通信網に接続している。
【0136】
磁気ディスク装置920には、OS921(オペレーティングシステム)、プログラム群922、ファイル群923が記憶されている。
【0137】
プログラム群922には、実施の形態において「〜部」として説明する機能を実行するプログラムが含まれる。プログラム(例えば、位置補正データ生成プログラム、位置標定プログラム、ユーザインタフェースプログラム)は、CPU901により読み出され実行される。すなわち、プログラムは、「〜部」としてコンピュータを機能させるものであり、また「〜部」の手順や方法をコンピュータに実行させるものである。
【0138】
ファイル群923には、実施の形態において説明する「〜部」で使用される各種データ(入力、出力、判定結果、計算結果、処理結果など)が含まれる。
【0139】
実施の形態において構成図およびフローチャートに含まれている矢印は主としてデータや信号の入出力を示す。
【0140】
実施の形態において「〜部」として説明するものは「〜回路」、「〜装置」、「〜機器」であってもよく、また「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ファームウェア、ソフトウェア、ハードウェアまたはこれらの組み合わせのいずれで実装されても構わない。
【0141】
実施の形態において、ランドマーク194の一点(または一つの計測点)を指定する場合、対象画像285aと参照画像285bとに対して同じ箇所の一点を指定することは困難である。対象画像285aと参照画像285bとが同一の画像ではなく、また利用者が手動で指定する必要があるためである。
この場合、対象画像285aに対する指定箇所と参照画像285bに対する指定箇所とがずれるため、正確な座標値補正量294を算出して対象経路データ291Aを高い精度で補正することができない。
【0142】
一方、実施の形態(図9参照)のように、ランドマーク194に対して対象領域205aを指定することにより、対象経路データ291Aを高い精度で補正することができる。
対象領域205aの計測点群に基づく特定点(例えば中心点)の領域座標値293を対象画像285aと参照画像285bとで比較することにより、正確な座標値補正量294を算出することができるためである。
【0143】
以下に、実施の形態において利用可能なランドマーク194の対象領域205aの一例を示す。ここで、「x」を計測車両100の進行方向、「y」を進行方向に対する右方向、「z」を高さ方向とする。
(1)電柱、信号機、標識、案内板、ガードレールなどの柱部分を対象領域205aにすることにより、車両座標値を三次元(x,y,z)で補正することが可能である(図4のS170−S180参照)。
但し、図11のようにして地面の高さを算出することができない場合(地面部分の計測点群が得られていない場合)、高さzを除く二次元(x,y)の補正が可能である。
(2)ビルの角(頂点)を対象領域205aにすることにより、三次元の補正が可能である。例えば、対象領域205aの計測点群が表す頂点部分(ビルの角)の座標値を領域座標値293として用いる。
(3)ビルや高架橋脚の角(縦エッジ)を対象領域205aにすることにより、二次元(x,y)の補正が可能である。例えば、対象領域205aの計測点群の二次元(x,y)の中心(または平均)の座標値を領域座標値293として用いる。
(4)ビルや高架橋脚の車道側の壁面を対象領域205aにすることにより、一次元(y)の補正が可能である。例えば、対象領域205aの計測点群の一次元(y)の中心(または平均)の座標値を領域座標値293として用いる。
(5)信号制御BOXやポストを対象領域205aにすることにより、二次元(x,y)の補正が可能である。例えば、対象領域205aの計測点群の二次元(x,y)の中心(または平均)の座標値を領域座標値293として用いる。
(6)標識や案内板の面を対象領域205aにすることにより、一次元(x)の補正が可能である。例えば、対象領域205aの計測点群の一次元(x)の中心(または平均)の座標値を領域座標値293として用いる。
(7)歩道橋を対象領域205aにすることにより、一次元(z)の補正が可能である。例えば、対象領域205aの計測点群の一次元(z)の中心(または平均)の座標値を領域座標値293として用いる。
【符号の説明】
【0144】
100 計測車両、101 天板、110 GNSS受信機、120 IMU、130 レーザスキャナ、140 カメラ、191 GNSS衛星、192 一般道、193 高速道路、194 ランドマーク、200 位置標定装置、201 経路地点選択画面、201a 誤差グラフ、202 参照点群データ選択画面、202a 対象経路グラフ、202b 参照経路候補グラフ、203 カメラ画像選択画面、203a 対象画像候補、203b 参照画像候補203b、204 計測点群確認画面、204a 点群画像、205 領域指定画面、205A 点群投影画像、205a 対象領域、205b 対象領域点群、210 計測経路算出部、220 計測点群生成部、230 ユーザインタフェース部、231 経路地点決定部、232 参照点データ決定部、233 対象領域決定部、240 位置標定部、241 領域座標値算出部、242 位置補正部、281 GNSS観測データ、282 IMU計測データ、283 車速データ、284 レーザ計測データ、285 カメラ画像データ、285A 対象画像データ、285B 参照画像データ、285a 対象画像、285b 参照画像、290 標定装置記憶部、291 計測経路データ、291A 対象経路データ、291B 参照経路データ、292 計測点群データ、292A 対象点群データ、292B 参照点群データ、292a 対象点群、292b 参照点群、293 領域座標値、294 座標値補正量、901 CPU、902 バス、903 ROM、904 RAM、905 通信ボード、911 ディスプレイ装置、912 キーボード、913 マウス、914 ドライブ装置、920 磁気ディスク装置、921 OS、922 プログラム群、923 ファイル群、931 マウスカーソル。
【技術分野】
【0001】
本発明は、例えば、車両の位置を標定するための位置補正データ生成装置、位置標定装置、ユーザインタフェース装置、位置補正データ生成装置の位置補正データ生成方法、位置標定装置の位置標定方法、ユーザインタフェース装置の情報処理方法、位置補正データ生成プログラム、位置標定プログラムおよびユーザインタフェースプログラムに関するものである。
【背景技術】
【0002】
現在、測量分野において移動しながら三次元の計測を行うモービルマッピングシステム(MMS:Mobile Mapping System)が普及しつつある。
【0003】
MMSは、GPS衛星(GPS:Global Positioning System)が可視である環境下では地図情報レベル500(縮尺1/500)という高精度な計測が可能である。
しかし、高架下や高層ビルが林立する地域など、GPS衛星が不可視である環境下においては、IMU(Inertial Measurement Unit)のデータだけを用いて位置の標定を行うため、計測精度が悪化してしまう。そのため、位置を高精度に補正する手法が求められる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−264983号公報
【特許文献2】国際公開2008/099915号パンフレット
【非特許文献】
【0005】
【非特許文献1】石川貴一郎,村石隆介,天野嘉春,橋詰匠,島嘉宏,瀧口純一,清水聡,“モービルマッピングシステムと三次元空間情報管理システムを用いた実都市空間モデリング&ウォークスルーシステム”,第13回ロボティクスシンポジア,pp.186−191,2008
【非特許文献2】石川貴一郎,高野雅史,梶原尚幸,瀧口純一,天野嘉春,橋詰匠,“道路地物の測量値とGPS/IMUを複合した自己位置標定の研究”,ロボティクスメカトロニクス講演会2009,1A2−B20,2009.6
【非特許文献3】Gabriel Taubin,“Estimation of Planar Curves,Surfaces,and Nonplanar Space Curves Defined by Implicit Equations with Applications to Edge and Range Image Segmentation”,IEEE Transactions ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE,VOL.13,NO.11 NOVEMBER 1991,pp1115−1138
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、例えば、GPS衛星が不可視である環境下においても高精度に位置を標定できるようにすることを目的とする。
【課題を解決するための手段】
【0007】
本発明の位置標定装置は、
計測機器を搭載した移動体の座標値を移動体座標値として含む移動体データを記憶する移動体データ記憶部と、
前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む計測点データを記憶する計測点データ記憶部と、
前記計測領域内の複数の地点それぞれの座標値を参照点の参照点座標値として含むデータを参照点データとして記憶する参照点データ記憶部と、
前記計測領域内の特定領域を指定する領域指定を入力機器から入力する領域指定入力部と、
前記領域指定入力部が入力した領域指定と前記計測点データ記憶部に記憶される計測点データとに基づいて前記特定領域の特定地点の座標値を第一の領域座標値として算出し、前記領域指定入力部が入力した領域指定と前記参照点データ記憶部に記憶される参照点データとに基づいて前記特定領域の前記特定地点の座標値を第二の領域座標値として算出する領域座標値算出部と、
前記領域座標値算出部によって算出された第一の領域座標値と第二の領域座標値との差を座標値誤差として算出し、算出した座標値誤差を含んだデータを前記移動体データに含まれる移動体座標値の補正に用いる補正データとして生成する補正データ生成部とを備える。
【発明の効果】
【0008】
本発明によれば、例えば、GPS衛星が不可視である環境下においても高精度に位置を標定することができる。
【図面の簡単な説明】
【0009】
【図1】実施の形態1における計測車両100の外観図。
【図2】実施の形態1における衛星可視環境および衛星不可視環境の一例を示す図。
【図3】実施の形態1における位置標定装置200の機能構成図。
【図4】実施の形態1における位置標定装置200の位置標定方法を示すフローチャート。
【図5】実施の形態1における経路地点選択画面201と参照点群データ選択画面202とを示す図。
【図6】実施の形態1におけるカメラ画像選択画面203を示す図。
【図7】実施の形態1における計測点群確認画面204を示す図。
【図8】実施の形態1における点群投影画像205Aの生成方法を示す図。
【図9】実施の形態1における領域指定画面205の部分拡大図。
【図10】実施の形態1における領域座標値293(高さを除く座標値)を算出する方法の一例を示す図。
【図11】実施の形態1における領域座標値293(高さの座標値)を算出する方法の一例を示す図。
【図12】実施の形態1における位置標定装置200のハードウェア資源の一例を示す図。
【発明を実施するための形態】
【0010】
実施の形態1.
衛星可視環境で計測したレーザスキャナの計測データと衛星不可視環境で計測したレーザスキャナの計測データとに基づいて、衛星不可視環境で測位した位置データを補正する形態について説明する。
【0011】
図1は、実施の形態1における計測車両100の外観図である。
実施の形態1における計測車両100について、図1に基づいて説明する。
【0012】
計測車両100(移動体の一例)はMMS(モービルマッピングシステム)で使用する車両である。MMSとは、計測車両100で計測地域を走行し、走行した道路周辺の地物(建物、標識、白線など)の三次元の座標値を計測するシステムである。
以下、MMSの計測を「道路周辺計測」という。
【0013】
計測車両100は、3台のGNSS受信機110と、IMU120と、オドメトリ(図示省略)と、2台のレーザスキャナ130と、2台のカメラ140とを備える。
これらのセンサ(オドメトリを除く)は、計測車両100の天部に設けた天板101に取り付けられる。
【0014】
GNSS受信機110は、GNSS(Global Navigation Satellite Systems)の衛星から測位信号を受信するアンテナを備える。GPS(Global Positioning System)はGNSSの一例である。
GNSS受信機110は、受信した測位信号に基づいて衛星との疑似距離、測位信号を搬送した搬送波の位相および三次元の座標値を算出する。
例えば、3台のGNSS受信機110のうち2台のGNSS受信機110b・cは天板101の前方の左右の端部に設置し、残りの1台のGNSS受信機110aは天板101の後方の真ん中に設置する。
【0015】
IMU120(Inertial Measurement Unit)は、3軸方向の角速度を計測するジャイロセンサと、3軸方向の加速度を計測する加速度センサとを備える。
【0016】
オドメトリは、計測車両100の走行速度(車速)を計測する。
【0017】
レーザスキャナ130は、計測車両100の幅方向に放射角度を変えながらレーザ光を放射し、放射先に位置する地物に反射したレーザ光を受光する。
レーザスキャナ130は、レーザ光を放射してから受光するまでの時刻を計測し、計測した時刻に光速を乗算して地物との距離を算出する。
例えば、2台のレーザスキャナ130のうち一方のレーザスキャナ130は天板101の前方に斜め下向きに設置し、他方のレーザスキャナ130は天板101の中央部分に斜め上向きに設置する。
【0018】
前方カメラ140は、計測車両100の前方を撮像する。
2台の前方カメラ140のうち一方の前方カメラ140は天板101の前方に正面に向けて設置し、他方の前方カメラ140は天板101の前方に斜め下向きに設置する。
【0019】
図2は、実施の形態1における衛星可視環境および衛星不可視環境の一例を示す図である。
図2の計測車両100aのように高速道路193の高架下にある一般道192を通行する場合、高速道路193によってGNSS衛星191が遮蔽されるため、計測車両100aはGNSS衛星191から測位信号を受信することができない。
このように、GNSS衛星191から測位信号を受信することができない環境を「衛星不可視環境」という。高層ビルが密集する地域なども衛星不可視環境に該当する。
【0020】
一方、計測車両100bのように高架下以外の一般道192を通行する場合、計測車両100bはGNSS衛星191から測位信号を受信することができる。
このように、GNSS衛星191から測位信号を受信することができる環境を「衛星可視環境」という。周囲の建物の高さが低く、また建物が密集していない地域なども衛星可視環境に該当する。
【0021】
衛星可視環境では、GNSS衛星191の測位信号を観測した観測データに基づいてIMUを用いた測位データを補正することにより、高精度な測位データを得ることができる。
しかし、衛星不可視環境では、IMUを用いた測位データを補正することができないため、高精度な測位データを得ることができない。
【0022】
そこで、実施の形態1における位置標定装置は、衛星可視環境で計測したレーザスキャナの計測データと衛星不可視環境で計測したレーザスキャナの計測データとのそれぞれから共通するランドマーク194(例えば、信号機の柱)の計測データを抽出する。
位置標定装置は、抽出したランドマーク194の計測データに基づいて衛星不可視環境の測位データの補正量を算出し、算出した補正量を用いて衛星不可視環境の測位データを補正する。これにより、衛星不可視環境の高精度な測位データを得ることができる。
【0023】
図3は、実施の形態1における位置標定装置200の機能構成図である。
実施の形態1における位置標定装置200の機能構成について、図3に基づいて説明する。
【0024】
位置標定装置200(位置補正データ生成装置、位置標定装置、ユーザインタフェース装置の一例)は、計測経路算出部210、計測点群生成部220、ユーザインタフェース部230、位置標定部240および標定装置記憶部290を備える。
【0025】
標定装置記憶部290(移動体データ記憶部、計測点データ記憶部、参照点データ記憶部、計測領域画像記憶部の一例)は、位置標定装置200で使用するデータを記憶する。
GNSS観測データ281、IMU計測データ282、車速データ283、レーザ計測データ284およびカメラ画像データ285は、標定装置記憶部290に記憶されるデータの一例である。
計測経路データ291、計測点群データ292、領域座標値293および座標値補正量294は、標定装置記憶部290に記憶されるデータの一例である。
【0026】
GNSS観測データ281は、計測車両100(図1参照)のGNSS受信機110によって得られるデータである。
例えば、GNSS観測データ281は、測位信号を受信した時刻(観測時刻)に対応付けて疑似距離と搬送波位相と三次元座標値とを示す。
【0027】
IMU計測データ282は、計測車両100のIMU120によって得られるデータである。
例えば、IMU計測データ282は、計測時刻に対応付けて3軸方向の角速度と3軸の加速度とを示す。
【0028】
車速データ283は、計測車両100のオドメトリによって得られるデータである。
例えば、車速データ283は、計測時刻に対応付けて計測車両100の車速を示す。
【0029】
レーザ計測データ284は、計測車両100のレーザスキャナ130によって得られるデータである。
例えば、レーザ計測データ284は、計測時刻に対応付けて地物との距離(計測距離)とレーザ光の放射角度(計測角度)とを示す。また、レーザ計測データ284は、計測距離と計測角度とに基づいた座標値であって、レーザスキャナ130の取り付け位置を原点とする二次元(または三次元)の座標値を示してもよい。
【0030】
カメラ画像データ285は、計測車両100のカメラ140によって得られるデータである。
例えば、カメラ画像データ285は、カメラ140によって撮像されたカメラ画像(計測領域画像の一例)を撮像時刻に対応付けて示す。
【0031】
計測経路データ291(移動体データの一例)は、GNSS観測データ281とIMU計測データ282と車速データ283とに基づいて計測経路算出部210によって生成されるデータである。計測経路データ291は道路周辺計測毎に生成される。
計測経路データ291は、計測時刻毎に計測車両100の三次元の座標値および姿勢の角度を世界座標系の値で示す。ENU座標系(East−North−Up)は世界座標系の一例であり、(緯度,経度,高度)は世界座標系の座標値の一例である。以下、計測車両100の三次元の座標値を「車両座標値」といい、計測車両100の三次元の姿勢の角度を「車両姿勢角」という。
計測経路データ291は、さらに、計測時刻毎に計測車両100の座標値(及び/または姿勢角)に含まれる予測誤差を示す。例えば、後述するカルマンフィルタ処理の補正量を予測誤差として計測経路データ291に設定してもよい。但し、カルマンフィルタ処理の補正量以外の値を予測誤差にしても構わない。例えば、可視衛星(受信することができた測位信号に対応するGNSS衛星)の数に応じた所定の値を予測誤差にしても構わない。
【0032】
計測点群データ292(計測点データ、参照点データの一例)は、レーザ計測データ284に基づいて計測点群生成部220によって生成されるデータである。計測点群データ292は道路周辺計測毎に生成される。
計測点群データ292は、レーザ光を反射した地点(以下、計測点という)毎に三次元の座標値を世界座標系の値で示す。以下、計測点の三次元の座標値を「計測点座標値」という。
【0033】
領域座標値293は、計測点群データ292に基づいて位置標定部240によって算出される。
領域座標値293は、ランドマーク194の三次元の座標値を世界座標系の値で示す。
【0034】
座標値補正量294は、衛星可視環境の領域座標値293と衛星不可視環境の領域座標値293とに基づいて位置標定部240によって算出される。
座標値補正量294は、衛星不可視環境の計測経路データ291(後述する対象経路データ291A)の補正に用いられる。
【0035】
計測経路算出部210は、GNSS観測データ281とIMU計測データ282と車速データ283とに基づいて所定の航法処理によって計測車両100の各時刻の三次元の座標値および姿勢角を算出し、計測経路データ291を生成する。
【0036】
例えば、計測経路算出部210は、GPS−Gyro/IMU複合航法(GPS/IMU複合航法ともいう)によって計測車両100の各時刻の三次元の座標値および姿勢角を算出し、計測経路データ291を生成する。
【0037】
例えば、計測経路算出部210は、以下のように計測経路データ291を生成する。
計測経路算出部210は、IMU計測データ282に含まれる三次元の加速度と三次元の角速度とを用いてストラップダウン演算を行い、計測車両100の座標値と姿勢角と速度とを算出する。
計測経路算出部210は、GNSS観測データ281に含まれる座標値、疑似距離または搬送波位相に基づいて航法処理を行い、計測車両100の座標値を算出する。
計測経路算出部210は、GNSS観測データ281に含まれる座標値に基づいて第一のGNSS受信機110aから第二のGNSS受信機110bへの基線ベクトルと第一のGNSS受信機110aから第三のGNSS受信機110cへの基線ベクトルとを算出する。計測経路算出部210は、二つの基線ベクトルに基づいて計測車両100の姿勢角を算出する。
計測経路算出部210は、航法処理で算出した座標値とストラップダウン演算で算出した座標値との差を座標値残差として算出する。計測経路算出部210は、基線ベクトルに基づいて算出した姿勢角とストラップダウン演算で算出した姿勢角との差を姿勢角残差として算出する。計測経路算出部210は、車速データ283に含まれる速度とストラップダウン演算で算出した速度との差を速度残差として算出する。
計測経路算出部210は、座標値残差と姿勢角残差と速度残差との少なくともいずれかを入力として所定のカルマンフィルタ処理を行い、座標値の補正量と姿勢角の補正量とを算出する。
計測経路算出部210は、ストラップダウン演算で算出した座標値に座標値の補正量を加算して座標値を補正し、ストラップダウン演算で算出した姿勢角に姿勢角の補正量を加算して姿勢角を補正し、補正した座標値と姿勢角とを設定して計測経路データ291を生成する。
【0038】
但し、計測経路算出部210は、任意の航法処理によって計測車両100の各時刻の座標値と姿勢角とを算出し、計測経路データ291を生成してもよい。
【0039】
計測点群生成部220は、計測経路データ291とレーザ計測データ284とに基づいて計測点群データ292を生成する。
【0040】
レーザ光を反射した計測点の三次元の座標値は、レーザスキャナ130の計測時刻の位置からレーザ光の放射方向へ計測距離だけ離れた地点の座標値として算出される。
レーザスキャナ130の計測時刻の位置は、計測車両100の計測時刻の位置からレーザスキャナ130の取り付け位置の座標値だけ移動した地点の座標値によって示される。
レーザ光の放射方向は、計測車両100の姿勢角からレーザスキャナ130の取り付け角度だけ傾けた角度によって示される。
レーザスキャナ130の取り付け位置の座標値および取り付け角度を設定したレーザ外部パラメータは標定装置記憶部290に予め記憶しておく。
【0041】
例えば、計測点群データ292の生成方法は特許文献2に開示されている。
【0042】
ユーザインタフェース部230は、経路地点決定部231と参照点データ決定部232と対象領域決定部233とを備える。
【0043】
経路地点決定部231(地点指定画面表示部、地点指定入力部の一例)は、複数の計測経路データ291(移動体データの一例)のうち予測誤差が所定の誤差閾値より大きい計測経路データ291を補正対象の対象経路データ291A(対象移動体データの一例)として選択する。
経路地点決定部231は、選択した対象経路データ291Aの予測誤差に基づいて、対象経路データ291Aの予測誤差を表す誤差グラフを含んだ画面を地点指定画面(後述する経路地点選択画面201)として表示する(地点指定画面表示処理)。
【0044】
経路地点決定部231は、地点指定画面に対して計測経路内の特定地点(後述する経路地点)を指定する地点指定を入力機器から入力する(地点指定入力処理)。
【0045】
参照点データ決定部232(参照移動体データ候補選択部、データ指定画面表示部、データ指定入力部の一例)は、経路地点決定部231が入力した地点指定に基づいて特定地点から所定範囲内に位置する地点の車両座標値(移動体座標値の一例)を含んだ複数の計測経路データ291を参照経路データ候補(参照移動体データ候補の一例)として選択する(参照移動体データ候補選択処理)。
【0046】
参照点データ決定部232は、複数の計測経路データ291それぞれの車両座標値と予測誤差とを表す画面をデータ指定画面(後述する参照点群データ選択画面202)として表示する(データ指定画面表示処理)。
【0047】
例えば、参照点データ決定部232は、複数の計測経路データ291に基づいて計測車両100(移動体の一例)の計測経路を表す経路グラフを含んだ画面をデータ指定画面として表示する。
【0048】
例えば、参照点データ決定部232は、計測経路の予測誤差の大きさによって色彩が異なる経路グラフを含んだデータ指定画面を表示する。
【0049】
例えば、参照点データ決定部232は、対象経路データの経路グラフと参照経路データ候補の経路グラフとをデータ指定画面に表示する。
【0050】
参照点データ決定部232は、複数の計測点群データ292(計測点データの一例)のうち対象点群データ292A(特定の計測点データの一例)以外の計測点群データ292を参照点群データ292B(参照点データの一例)として指定するデータ指定を入力機器から入力する(データ指定入力処理)。
【0051】
参照点データ決定部232は、データ指定画面に対して参照点群データ292Bに対応する移動体データを指定するデータ指定を入力する。
【0052】
対象領域決定部233(領域指定画面表示部、領域指定入力部の一例)は、対象点群データ292Aに基づいて複数の計測点を描画した画面を計測点領域指定画面(後述する領域指定画面205)として表示する。
対象領域決定部233は、参照点群データ292Bに基づいて複数の参照点を描画した画面を参照点領域指定画面(後述する領域指定画面205)として表示する(領域指定画面表示処理)。
【0053】
例えば、対象領域決定部233は、第一のカメラ画像(第一の計測領域画像の一例)に重ねて複数の計測点を描画して計測点領域指定画面を表示する。
また、対象領域決定部233は、第二のカメラ画像(第二の計測領域画像の一例)に重ねて複数の参照点を描画して参照点領域指定画面を表示する。
【0054】
対象領域決定部233は、計測領域内の特定領域(後述する対象領域)を指定する領域指定を入力機器から入力する(領域指定入力処理)。
【0055】
例えば、対象領域決定部233は、計測点領域指定画面に対して特定領域に対応する部分を計測点領域(後述する第一の対象領域)として指定する第一の領域指定を入力する。
また、対象領域決定部233は、参照点領域指定画面に対して特定領域に対応する部分を参照点領域(後述する第二の対象領域)として指定する第二の領域指定を入力する。
【0056】
位置標定部240は、領域座標値算出部241と位置補正部242とを備える。
【0057】
領域座標値算出部241(領域座標値算出部の一例)は、対象領域決定部233が入力した領域指定と対象点群データ292Aとに基づいて特定領域の特定地点の座標値を第一の領域座標値293として算出する。
領域座標値算出部241は、対象領域決定部233が入力した領域指定と参照点群データ292Bとに基づいて特定領域の特定地点の座標値を第二の領域座標値293として算出する(領域座標値算出処理)。
【0058】
例えば、領域座標値算出部241は、対象点群データ292Aに含まれる計測点座標値のうち特定領域の複数の計測点それぞれの計測点座標値に基づいて第一の領域座標値293を算出する。
また、領域座標値算出部241は、参照点群データ292Bに含まれる参照点座標値(計測点座標値)のうち特定領域の複数の参照点それぞれの参照点座標値に基づいて第二の領域座標値293を算出する。
【0059】
例えば、領域座標値算出部241は、特定領域の中心の地点の座標値として第一の領域座標値293と第二の領域座標値293とを算出する。
【0060】
例えば、領域座標値算出部241は、特定の立体物(ランドマーク194)の表面を計測した複数の計測点座標値に基づいて、特定の立体物の断面中心の座標値を第一の領域座標値293として算出する。
また、領域座標値算出部241は、特定の立体物の表面を計測した複数の参照点座標値に基づいて特定の立体物の断面中心の座標値を第二の領域座標値293として算出する。
【0061】
例えば、領域座標値算出部241は、特定の立体物の断面中心の座標値のうち高さを除いた二次元の座標値を第一の領域座標値293に含まれる二次元座標値として算出する。
また、領域座標値算出部241は、特定の立体物の計測点座標値を除いた残りの計測点座標値に基づいて特定の立体物の位置する地点の地面の高さを第一の領域座標値293に含まれる高さの座標値として算出する。
【0062】
例えば、領域座標値算出部241は、第一の領域指定によって指定される計測点領域に描画された複数の計測点それぞれの計測点座標値に基づいて第一の領域座標値293を算出する。
また、領域座標値算出部241は、第二の領域指定によって指定される参照点領域に描画された複数の参照点それぞれの参照点座標値に基づいて第二の領域座標値293を算出する。
【0063】
例えば、領域座標値算出部241は、対象点群データ292Aに基づいて第一の領域座標値293を算出する。
また、領域座標値算出部241は、参照点群データ292Bに基づいて第二の領域座標値293を算出する。
【0064】
位置補正部242(補正データ生成部、移動体データ補正部の一例)は、領域座標値算出部241によって算出された第一の領域座標値293と第二の領域座標値293との差を座標値補正量294(座標値誤差の一例)として算出する。
位置補正部242は、算出した座標値補正量294に基づいて計測経路データ291に含まれる車両座標値を補正する(移動体データ補正処理)。
【0065】
但し、実施の形態1で説明する位置標定装置200を1台の装置ではなく複数台の装置を用いて構成しても構わない。
例えば、位置補正部242は、座標値補正量294を含んだ補正データを生成し、生成した補正データを所定の補正装置へ送信する。補正装置は、位置標定装置200から補正データを受信し、受信した補正データに含まれる座標値補正量294に基づいて計測経路データ291に含まれる車両座標値を補正する。この場合、補正装置は、計測経路データ291およびその他の必要なデータを予め記憶部に記憶し、又は位置標定装置200から受信する。
【0066】
図4は、実施の形態1における位置標定装置200の位置標定方法を示すフローチャートである。
実施の形態1における位置標定装置200の位置標定方法(位置補正データ生成方法、位置標定方法の一例)について、図4に基づいて説明する。
【0067】
まず、位置標定方法の概要について説明する。
【0068】
経路地点決定部231は、対象経路データ291Aを決定して経路地点選択画面201を表示する(S110)。
参照点データ決定部232は、参照点群データ選択画面202を表示して参照点群データ292Bを決定する(S120)。
対象領域決定部233は、対象点群292aの領域指定画面205を表示して対象領域205aを決定する(S130)。
領域座標値算出部241は、対象点群データ292Aに基づいて対象領域205aの座標値(第一の領域座標値293)を算出する(S140)。
対象領域決定部233は、参照点群292bの領域指定画面205を表示して対象領域205aを決定する(S150)。
領域座標値算出部241は、参照点群データ292Bに基づいて対象領域205aの座標値(第二の領域座標値293)を算出する(S160)。
位置補正部242は、第一の領域座標値293と第二の領域座標値293とに基づいて座標値補正量294を算出する(S170)。
位置補正部242は、座標値補正量294に基づいて対象経路データ291Aの車両座標値を補正する(S180)。
【0069】
次に、位置標定方法の詳細について説明する。
【0070】
S110において、経路地点決定部231は、標定装置記憶部290に記憶されている複数の計測経路データ291のうち予測誤差が所定の誤差閾値より大きい計測経路データ291を判定する。
以下、S110で判定する計測経路データ291を「対象経路データ291A」という。
また、対象経路データ291Aに含まれる複数の車両座標値によって表される計測車両100の計測経路を「対象経路」という。
さらに、対象経路の計測点群データ292を「対象点群データ292A」といい、対象経路のカメラ画像データ285を「対象画像データ285A」という。
【0071】
例えば、経路地点決定部231は、計測経路データ291毎に複数の計測点それぞれの予測誤差に基づいて予測誤差の平均値を計測経路データ291の予測誤差として算出し、各計測経路データ291の予測誤差を誤差閾値と比較して対象経路データ291Aを判定する。
また、経路地点決定部231は、計測経路データ291毎に予測誤差が誤差閾値より大きい計測点の個数を算出し、算出した計測点の個数が所定の個数閾値以上である計測経路データ291を対象経路データ291Aとして判定してもよい。
【0072】
次に、経路地点決定部231は、対象経路データ291Aに含まれる複数の車両座標値それぞれの予測誤差を表すグラフを生成し、生成したグラフを含んだ画面を表示する。
以下、予測誤差を表すグラフを「誤差グラフ201a」といい、誤差グラフ201aを含んだ画面を「経路地点選択画面201」という。
【0073】
図5は、実施の形態1における経路地点選択画面201と参照点群データ選択画面202とを示す図である。
実施の形態1における経路地点選択画面201について、図5に基づいて説明する。
【0074】
経路地点選択画面201は、対象経路データ291Aの誤差グラフ201aを示している。
誤差グラフ201aは、時刻に対応付けて車両座標値の予測誤差を表している。横軸が時間軸であり、縦軸が車両座標値の予測誤差を表す軸である。
【0075】
誤差グラフ201aは、予測誤差の大きさに応じて色彩を変えてもよい。また、線の太さや種類を変えてもよい。
例えば、予測誤差が3cm(センチメートル)以下の部分は「緑色」の線で表す。
また、予測誤差が5cm以下の部分(3cm以下の部分を除く)は「青色」の線で表し、予測誤差が25cm以下の部分(5cm以下の部分を除く)は「黄色」の線で表し、予測誤差が25cmより大きい部分は「赤色」の線で表す。
【0076】
利用者は、位置標定装置200の入力機器(例えば、キーボードやマウス)を用いて誤差グラフ201aの特定部分を指定する。
例えば、利用者は、マウスを操作してマウスカーソル931で誤差グラフ201aの特定部分を指定する。利用者が指定した部分を丸印で図示している。
【0077】
図4に戻り、S110の説明を続ける。
【0078】
経路地点決定部231は、利用者に指定された特定部分の時刻に対応する車両座標値を誤差グラフ201aから取得する。
以下、誤差グラフ201aから取得される車両座標値であって指定された特定部分に対応する車両座標値が示す地点を「対象経路地点」という。
【0079】
S110の後、S120に進む。
【0080】
S120において、参照点データ決定部232は、標定装置記憶部290に記憶されている複数の計測経路データ291のうち、S110で決定された対象経路地点から所定範囲内に位置する地点の車両座標値を含む複数の計測経路データ291を判定する。但し、対象経路データ291Aは除く。
以下、S120で判定される計測経路データ291を「参照経路データ候補」という。
【0081】
例えば、参照点データ決定部232は、対象経路データ291Aを除く計測経路データ291毎に複数の車両座標値と対象経路地点の車両座標値とを比較する。参照点データ決定部232は、対象経路地点の車両座標値との距離が所定の距離閾値以下である車両座標値を含んだ計測経路データ291を参照経路データ候補として判定する。
【0082】
参照点データ決定部232は、対象経路データ291Aに含まれる複数の車両座標値のうち対象経路地点から所定範囲内に位置する複数の地点それぞれの車両座標値を抽出し、抽出した複数の車両座標値に基づいて計測車両100の計測経路(対象経路)を表す経路グラフを生成する。以下、対象経路データ291Aに基づく経路グラフを「対象経路グラフ202a」という。
参照点データ決定部232は、参照経路データ候補毎に参照経路データ候補に含まれる複数の車両座標値のうち対象経路地点から所定範囲内に位置する複数の地点それぞれの車両座標値を抽出し、抽出した複数の車両座標値に基づいて計測車両100の計測経路(参照経路候補)を表す経路グラフを生成する。以下、参照経路データ候補に基づく経路グラフを「参照経路候補グラフ202b」という。
【0083】
参照点データ決定部232は、対象経路グラフ202aと複数の参照経路候補グラフ202bとを含んだ画面を表示する。
以下、対象経路グラフ202aと複数の参照経路候補グラフ202bとを含んだ画面を「参照点群データ選択画面202」という。
【0084】
図5に、参照点群データ選択画面202の一例を示す。
図5において、参照点群データ選択画面202は、対象経路グラフ202aと複数の参照経路候補グラフ202bとを二次元(高さを除く)で示している。例えば、横軸は計測車両100の進行方向または東方向を表す座標軸(x軸)であり、縦軸は進行方向に対する右方向または北方向を表す座標軸(y軸)である。
【0085】
対象経路グラフ202aは、対象経路を表す実線の他に、カメラ画像が撮像された撮像地点を表す表記(丸印)を示している。
【0086】
複数の参照経路候補グラフ202bは、参照経路候補を表す点線であって予測誤差に応じて太さが異なる点線を示している。点線が太いほど予測誤差は小さい。
但し、経路地点選択画面201の誤差グラフ201aと同様に、予測誤差に応じて参照経路候補グラフ202bの色彩を変えてもよい。また、参照経路候補グラフ202bは、対象経路グラフ202aと同様に実線であってもよい。
【0087】
利用者は、位置標定装置200の入力機器を用いていずれかの参照経路候補グラフ202bを選択する。参照点データ決定部232は、選択される参照経路候補グラフ202bを指定する指定データを入力機器から入力する。
例えば、利用者は、最も予測誤差が小さい参照経路候補グラフ202b−1をマウスカーソル931で選択する。
【0088】
利用者が参照経路候補グラフ202bを選択する際、参照点データ決定部232は、参照経路候補グラフ202bの情報を表示してもよい。
例えば、参照点データ決定部232は、マウスカーソル931が指し示す地点の高度、対象経路地点との高度差、対象経路地点との距離、予測誤差などの情報をポップアップ表示してもよい。
【0089】
さらに、利用者は、対象経路グラフ202aのいずれかの撮像地点を選択する。
例えば、利用者は、対象経路グラフ202aと参照経路候補グラフ202bとが交差する部分の撮像地点をマウスカーソル931で選択する。
【0090】
以下、選択された参照経路候補グラフ202bに対応する参照経路データ候補を「参照経路データ291B」という。
また、参照経路データ291Bに含まれる複数の車両座標値によって表される計測車両100の計測経路を「参照経路」という。
さらに、参照経路の計測点群データ292を「参照点群データ292B」といい、参照経路のカメラ画像データ285を「参照画像データ285B」という。
【0091】
以下、選択された撮像地点を「対象撮像地点」という。
【0092】
図4に戻り、S120の説明を続ける。
【0093】
参照点データ決定部232は、対象撮像地点の撮像時刻の前後に撮像され所定の撮像枚数のカメラ画像を対象経路のカメラ画像データ285(対象画像データ285A)から取得する。
以下、対象画像データ285Aから取得するカメラ画像を「対象画像候補203a」という。
【0094】
参照点データ決定部232は、対象撮像地点から所定範囲内で撮像された所定の撮像枚数のカメラ画像を参照経路のカメラ画像データ285(参照画像データ285B)から取得する。
以下、参照画像データ285Bから取得するカメラ画像を「参照画像候補203b」という。
【0095】
参照点データ決定部232は、対象画像候補203aと参照画像候補203bとを含んだ画面を表示する。
以下、対象画像候補203aと参照画像候補203bとを含んだ画面を「カメラ画像選択画面203」という。
【0096】
図6は、実施の形態1におけるカメラ画像選択画面203を示す図である。
実施の形態1におけるカメラ画像選択画面203について、図6に基づいて説明する。
【0097】
カメラ画像選択画面203は、上段に対象画像候補203aと参照画像候補203bとを5枚ずつ示している。
【0098】
利用者は、位置標定装置200の入力機器を用いて対象画像候補203aと参照画像候補203bとを一枚ずつ選択する。参照点データ決定部232は、選択される対象画像候補203aを指定する指定データと、選択される参照画像候補203bを指定する指定データとを入力機器から入力する。
例えば、利用者は、ランドマークにしたい地物(例えば、標識やガードレールの柱)が大きく同じように映っている対象画像候補203a−4と参照画像候補203b−4とをマウスカーソル931で選択する。
【0099】
参照点データ決定部232は、選択された対象画像候補203aと参照画像候補203bとをカメラ画像選択画面203の下段に表示する。
以下、選択された対象画像候補203aを「対象画像285a」といい、選択された参照画像候補203bを「参照画像285b」という。
【0100】
図4に戻り、S120の説明を続ける。
【0101】
参照点データ決定部232は、対象点群データ292Aに含まれる複数の計測点座標値のうち対象画像285aの撮像時刻から所定の時刻範囲内の計測時刻に対応する複数の計測点座標値を抽出する。
以下、対象点群データ292Aから抽出する複数の計測点座標値に対応する複数の計測点を「対象点群292a(または抽出対象点群)」という。
【0102】
参照点データ決定部232は、参照点群データ292Bに含まれる複数の計測点座標値のうち参照画像285bの撮像時刻から所定の時刻範囲内の計測時刻に対応する複数の計測点座標値を抽出する。
以下、参照点群データ292Bから抽出する複数の計測点座標値に対応する複数の計測点を「参照点群292b(または抽出参照点群)」という。
【0103】
参照点データ決定部232は、対象点群292aと参照点群292bとを描画した点群画像204aを含む画面を表示する。
以下、対象点群292aと参照点群292bとを描画した点群画像を含む画面を「計測点群確認画面204」という。
【0104】
図7は、実施の形態1における計測点群確認画面204を示す図である。
実施の形態1における計測点群確認画面204について、図7に基づいて説明する。
【0105】
計測点群確認画面204は、画面の左側に対象画像285aと参照画像285bとを示し、画面の右側に点群画像204aを示す。
点群画像204aは、対象点群データ292Aに含まれる複数の計測点座標値に基づいて対象点群292aを二次元の平面に点描した点群画像と、参照点群データ292Bに含まれる複数の計測点座標値に基づいて参照点群292bを二次元の平面に点描した点群画像とを重ね合わせた画像である。
図7の点群画像204aに示すように、対象点群292aと参照点群292bとは計測点座標値の誤差によって前後左右にずれて描画される。
対象点群292aと参照点群292bとは、異なる色彩(赤、緑など)や表記(丸、三角など)で描画するとよい。
【0106】
利用者は、対象画像285aと参照画像285bと点群画像204aとを見比べて、ランドマークにしたい地物に対して十分な数の対象点群292aと参照点群292bとが得られていることを確認する。
十分な数の対象点群292aと参照点群292bとが得られていない場合、利用者は、経路地点選択画面201(図5参照)、参照点群データ選択画面202(図6参照)またはカメラ画像選択画面203(図7参照)を切り替える。そして、利用者は、対象経路地点、参照経路、対象撮像地点、対象画像285a、参照画像285bまたはその他の事項を指定し直す。
例えば、利用者は、各画面の左上のタブをマウスカーソル931で選択して画面を切り替える。
【0107】
図4に戻り、位置標定方法の説明をS130から続ける。
【0108】
S130において、対象領域決定部233は、対象点群データ292Aに含まれる複数の計測点座標値に基づいて対象点群292aを対象画像285aに投影し、対象点群292aを投影した対象画像285aを含んだ画面を表示する。
以下、対象点群292aを投影した対象画像285aを対象点群292aの「点群投影画像205A」といい、対象点群292aの点群投影画像を含んだ画面を対象点群292aの「領域指定画面205」という。
【0109】
利用者は、対象点群292aの領域指定画面205に映っている地物のうちランドマーク194にする地物を決定する。
利用者は、位置標定装置200の入力機器を用いてランドマーク194の特定部分を「対象領域205a」として指定する。対象領域決定部233は、対象領域205aを指定する指定データを入力機器から入力する。
【0110】
S130の後、S140に進む。
【0111】
図8は、実施の形態1における点群投影画像205Aの生成方法を示す図である。
実施の形態1における点群投影画像205Aの生成方法について、図8に基づいて説明する。
【0112】
対象領域決定部233は、対象点群292aの計測点(対象点)毎に、対象画像285aを撮像したカメラ140から計測点までの方向を示すLOSベクトル(LOS:Line of Sight)を算出する。
カメラ140の座標値は、対象画像285aの撮像時刻に対応する車両座標値と計測車両100に対するカメラ140の取り付け位置の座標値(Δx,Δy,Δz)とによって定まる。つまり、車両座標値から(Δx,Δy,Δz)だけ移動した地点の座標値がカメラ140の座標値である。
計測点の座標値(計測点座標値)は、対象点群データ292Aに含まれる。
【0113】
対象領域決定部233は、計測点毎に、LOSベクトルと画像平面との交点の座標値を画素座標値(u,v)として算出する。
画像平面は、カメラ140の撮像範囲を表す平面であって、カメラ140の撮像中心からカメラ140の取り付け角度の方向に焦点距離fだけ離れた平面である。
【0114】
対象領域決定部233は、計測点毎に、画素座標値(u,v)で特定される対象画像285aの画素に計測点を描画する。
【0115】
カメラ140の取り付け位置の座標値および取り付け角度を設定したカメラ外部パラメータは標定装置記憶部290に予め記憶しておく。
【0116】
図9は、実施の形態1における領域指定画面205の部分拡大図である。
実施の形態1における対象領域205aの指定方法について、図9に基づいて説明する。
【0117】
例えば、利用者は、信号機、標識またはガードレールの柱のような棒状の立体物をランドマーク194として選択し、選択したランドマーク194の特定部分を対象領域205aとしてマウスカーソル931で指定する。
【0118】
図4に戻り、位置標定方法の説明をS140から続ける。
【0119】
S140において、領域座標値算出部241は、S130で指定された対象領域205aに含まれる対象点群292aの車両座標値を対象点群データ292Aから抽出する。
以下、対象領域205aに含まれる対象点群292aを「対象領域点群205b」という。
【0120】
領域座標値算出部241は、対象領域点群205bの車両座標値に基づいて対象領域205aの座標値を算出する。
以下、S140で算出する対象領域205aの座標値を「第一の領域座標値293」という。
S140の後、S150に進む。
【0121】
図10は、実施の形態1における領域座標値293(高さを除く座標値)を算出する方法の一例を示す図である。
高さを除く二次元の領域座標値293を算出する方法の一例について、図10に基づいて説明する。
【0122】
対象領域点群205bはランドマーク194の表面を計測した点群である。
したがって、対象領域点群205bの計測点座標値に基づいてランドマーク194の断面形状を得ることができる。
領域座標値算出部241は、ランドマーク194の断面の中心点Oの座標値を二次元の領域座標値293として算出する。
【0123】
例えば、領域座標値算出部241は、非特許文献3が開示するTaubin法を用いて、カーブフィッティング処理(サークルフィッティング処理ともいう)により、円柱状のランドマーク194の断面形状(円または楕円)を算出する。但し、Taubin法以外の方法を用いても構わない。
【0124】
図11は、実施の形態1における領域座標値293(高さの座標値)を算出する方法の一例を示す図である。
領域座標値293の高さを算出する方法の一例について、図11に基づいて説明する。
【0125】
領域座標値算出部241は、対象点群292aを構成する複数の対象点のうちランドマーク194の断面の中心点Oに近い対象点の計測点座標値を対象点群データ292Aから抽出する。但し、対象領域点群205bに含まれる対象点を除く。
領域座標値算出部241は、抽出した対象点の計測点座標値に基づいて領域座標値293の高さを算出する。
【0126】
例えば、領域座標値算出部241は、ランドマーク194の中心点Oの座標値と対象点群292aの計測点座標値とを高さを除く二次元の座標値で比較し、ランドマーク194の中心点Oから近い順に3つの対象点(図中の白抜きの丸印)の計測点座標値を取得する。
次に、領域座標値算出部241は、3つの対象点の計測点座標値(高さを含む三次元の座標値)に基づいて3つの対象点を含む平面Pを生成する。但し、2つの対象点または4つ以上の対象点に基づいて平面Pを生成しても構わない。平面Pはランドマーク194が位置する地点の地面を表す。
そして、領域座標値算出部241は、生成した平面Pとランドマーク194の中心点Oを含んだ垂線Lとの交点Iの座標値を高さを含む三次元の領域座標値293として算出する。
【0127】
図4に戻り、位置標定方法の説明を続ける。
以上のように、S130とS140とは、対象点群292aを対象として対象領域205aの座標値(第一の領域座標値293)を算出する処理である。
以下に説明するS150とS160とは、参照点群292bを対象として対象領域205aの座標値(第二の領域座標値293)を算出する処理である。
【0128】
S150において、対象領域決定部233は、参照点群データ292Bに基づいて参照点群292bを参照画像285bに投影して点群投影画像205Aを生成し、生成した点群投影画像205Aを含んだ領域指定画面205を表示する(S130と同様)。
利用者は、参照点群292bの領域指定画面205に対してランドマーク194の特定部分を対象領域205aとして指定する。このとき、利用者は、S130で指定した対象領域205aに対応するランドマーク194の特定部分を指定する。
対象領域決定部233は、対象領域205aを指定する指定データを入力する。
S150の後、S160に進む。
【0129】
S160において、領域座標値算出部241は、S150で指定された対象領域205aに含まれる参照点群292bの車両座標値を参照点群データ292Bから抽出し、抽出した車両座標値に基づいて第二の領域座標値293を算出する(S140と同様)。
S160の後、S170に進む。
【0130】
S170において、位置補正部242は、S140で算出された第一の領域座標値293とS160で算出された第二の領域座標値293とに基づいて座標値補正量294を算出する。
例えば、位置補正部242は、第一の領域座標値293と第二の領域座標値293との誤差を座標値補正量294として算出する。
S170の後、S180に進む。
【0131】
S180において、位置補正部242は、対象経路データ291Aに含まれる複数の車両座標値を座標値補正量294に基づいて補正する。
【0132】
例えば、位置補正部242は、対象点群292aの車両座標値に座標値補正量294を加算して対象点群292aの車両座標値を補正する。
さらに、位置補正部242は、対象点群292aの補正後の車両座標値と対象経路のIMU計測データ282とを用いてストラップダウン演算を行って残りの車両座標値を更新する。
これにより、衛星不可視環境にある対象経路を高い精度で計測した計測経路データ291(補正後の対象経路データ291A)を得ることができる。
S180により、位置標定方法は終了する。
【0133】
計測点群生成部220は、S180で得られた計測経路データ291を用いて対象経路の計測点群データ292を新たに生成する。
これにより、衛星不可視環境にある対象経路で計測した計測点群データ292を高い精度で得ることができる。また、精度が高い計測点群データ292は、道路周辺の地物を表す三次元モデルとして利用することができる。
【0134】
図12は、実施の形態1における位置標定装置200のハードウェア資源の一例を示す図である。
図12において、位置標定装置200は、CPU901(Central Processing Unit)を備えている。CPU901は、バス902を介してROM903、RAM904、通信ボード905、ディスプレイ装置911、キーボード912、マウス913、ドライブ装置914、磁気ディスク装置920などのハードウェアデバイスと接続され、これらのハードウェアデバイスを制御する。ドライブ装置914は、FD(Flexible Disk Drive)、CD(Compact Disc)、DVD(Digital Versatile Disc)などの記憶媒体を読み書きする装置である。
ROM903、RAM904、磁気ディスク装置920およびドライブ装置914は記憶機器の一例である。キーボード912およびマウス913は入力機器の一例である。ディスプレイ装置911は出力機器の一例である。
【0135】
通信ボード905は、有線または無線で、LAN(Local Area Network)、インターネット、電話回線などの通信網に接続している。
【0136】
磁気ディスク装置920には、OS921(オペレーティングシステム)、プログラム群922、ファイル群923が記憶されている。
【0137】
プログラム群922には、実施の形態において「〜部」として説明する機能を実行するプログラムが含まれる。プログラム(例えば、位置補正データ生成プログラム、位置標定プログラム、ユーザインタフェースプログラム)は、CPU901により読み出され実行される。すなわち、プログラムは、「〜部」としてコンピュータを機能させるものであり、また「〜部」の手順や方法をコンピュータに実行させるものである。
【0138】
ファイル群923には、実施の形態において説明する「〜部」で使用される各種データ(入力、出力、判定結果、計算結果、処理結果など)が含まれる。
【0139】
実施の形態において構成図およびフローチャートに含まれている矢印は主としてデータや信号の入出力を示す。
【0140】
実施の形態において「〜部」として説明するものは「〜回路」、「〜装置」、「〜機器」であってもよく、また「〜ステップ」、「〜手順」、「〜処理」であってもよい。すなわち、「〜部」として説明するものは、ファームウェア、ソフトウェア、ハードウェアまたはこれらの組み合わせのいずれで実装されても構わない。
【0141】
実施の形態において、ランドマーク194の一点(または一つの計測点)を指定する場合、対象画像285aと参照画像285bとに対して同じ箇所の一点を指定することは困難である。対象画像285aと参照画像285bとが同一の画像ではなく、また利用者が手動で指定する必要があるためである。
この場合、対象画像285aに対する指定箇所と参照画像285bに対する指定箇所とがずれるため、正確な座標値補正量294を算出して対象経路データ291Aを高い精度で補正することができない。
【0142】
一方、実施の形態(図9参照)のように、ランドマーク194に対して対象領域205aを指定することにより、対象経路データ291Aを高い精度で補正することができる。
対象領域205aの計測点群に基づく特定点(例えば中心点)の領域座標値293を対象画像285aと参照画像285bとで比較することにより、正確な座標値補正量294を算出することができるためである。
【0143】
以下に、実施の形態において利用可能なランドマーク194の対象領域205aの一例を示す。ここで、「x」を計測車両100の進行方向、「y」を進行方向に対する右方向、「z」を高さ方向とする。
(1)電柱、信号機、標識、案内板、ガードレールなどの柱部分を対象領域205aにすることにより、車両座標値を三次元(x,y,z)で補正することが可能である(図4のS170−S180参照)。
但し、図11のようにして地面の高さを算出することができない場合(地面部分の計測点群が得られていない場合)、高さzを除く二次元(x,y)の補正が可能である。
(2)ビルの角(頂点)を対象領域205aにすることにより、三次元の補正が可能である。例えば、対象領域205aの計測点群が表す頂点部分(ビルの角)の座標値を領域座標値293として用いる。
(3)ビルや高架橋脚の角(縦エッジ)を対象領域205aにすることにより、二次元(x,y)の補正が可能である。例えば、対象領域205aの計測点群の二次元(x,y)の中心(または平均)の座標値を領域座標値293として用いる。
(4)ビルや高架橋脚の車道側の壁面を対象領域205aにすることにより、一次元(y)の補正が可能である。例えば、対象領域205aの計測点群の一次元(y)の中心(または平均)の座標値を領域座標値293として用いる。
(5)信号制御BOXやポストを対象領域205aにすることにより、二次元(x,y)の補正が可能である。例えば、対象領域205aの計測点群の二次元(x,y)の中心(または平均)の座標値を領域座標値293として用いる。
(6)標識や案内板の面を対象領域205aにすることにより、一次元(x)の補正が可能である。例えば、対象領域205aの計測点群の一次元(x)の中心(または平均)の座標値を領域座標値293として用いる。
(7)歩道橋を対象領域205aにすることにより、一次元(z)の補正が可能である。例えば、対象領域205aの計測点群の一次元(z)の中心(または平均)の座標値を領域座標値293として用いる。
【符号の説明】
【0144】
100 計測車両、101 天板、110 GNSS受信機、120 IMU、130 レーザスキャナ、140 カメラ、191 GNSS衛星、192 一般道、193 高速道路、194 ランドマーク、200 位置標定装置、201 経路地点選択画面、201a 誤差グラフ、202 参照点群データ選択画面、202a 対象経路グラフ、202b 参照経路候補グラフ、203 カメラ画像選択画面、203a 対象画像候補、203b 参照画像候補203b、204 計測点群確認画面、204a 点群画像、205 領域指定画面、205A 点群投影画像、205a 対象領域、205b 対象領域点群、210 計測経路算出部、220 計測点群生成部、230 ユーザインタフェース部、231 経路地点決定部、232 参照点データ決定部、233 対象領域決定部、240 位置標定部、241 領域座標値算出部、242 位置補正部、281 GNSS観測データ、282 IMU計測データ、283 車速データ、284 レーザ計測データ、285 カメラ画像データ、285A 対象画像データ、285B 参照画像データ、285a 対象画像、285b 参照画像、290 標定装置記憶部、291 計測経路データ、291A 対象経路データ、291B 参照経路データ、292 計測点群データ、292A 対象点群データ、292B 参照点群データ、292a 対象点群、292b 参照点群、293 領域座標値、294 座標値補正量、901 CPU、902 バス、903 ROM、904 RAM、905 通信ボード、911 ディスプレイ装置、912 キーボード、913 マウス、914 ドライブ装置、920 磁気ディスク装置、921 OS、922 プログラム群、923 ファイル群、931 マウスカーソル。
【特許請求の範囲】
【請求項1】
計測機器を搭載した移動体の座標値を移動体座標値として含む移動体データを記憶する移動体データ記憶部と、
前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む計測点データを記憶する計測点データ記憶部と、
前記計測領域内の複数の地点それぞれの座標値を参照点の参照点座標値として含むデータを参照点データとして記憶する参照点データ記憶部と、
前記計測領域内の特定領域を指定する領域指定を入力機器から入力する領域指定入力部と、
前記領域指定入力部が入力した領域指定と前記計測点データ記憶部に記憶される計測点データとに基づいて前記特定領域の特定地点の座標値を第一の領域座標値として算出し、前記領域指定入力部が入力した領域指定と前記参照点データ記憶部に記憶される参照点データとに基づいて前記特定領域の前記特定地点の座標値を第二の領域座標値として算出する領域座標値算出部と、
前記領域座標値算出部によって算出された第一の領域座標値と第二の領域座標値との差を座標値誤差として算出し、算出した座標値誤差を含んだデータを前記移動体データに含まれる移動体座標値の補正に用いる補正データとして生成する補正データ生成部と
を備えることを特徴とする位置補正データ生成装置。
【請求項2】
前記領域座標値算出部は、前記計測点データに含まれる計測点座標値のうち前記特定領域の複数の計測点それぞれの計測点座標値に基づいて前記第一の領域座標値を算出し、前記参照点データに含まれる参照点座標値のうち前記特定領域の複数の参照点それぞれの参照点座標値に基づいて前記第二の領域座標値を算出する
ことを特徴とする請求項1記載の位置補正データ生成装置。
【請求項3】
前記領域座標値算出部は、前記特定領域の中心の地点の座標値として前記第一の領域座標値と前記第二の領域座標値とを算出する
ことを特徴とする請求項2記載の位置補正データ生成装置。
【請求項4】
前記領域座標値算出部は、特定の立体物の表面を計測した複数の計測点座標値に基づいて前記特定の立体物の断面中心の座標値を前記第一の領域座標値として算出し、前記特定の立体物の表面を計測した複数の参照点座標値に基づいて前記特定の立体物の断面中心の座標値を前記第二の領域座標値として算出する
ことを特徴とする請求項3記載の位置補正データ生成装置。
【請求項5】
前記領域座標値算出部は、前記特定の立体物の断面中心の座標値のうち高さを除いた二次元の座標値を前記第一の領域座標値に含まれる二次元座標値として算出し、前記特定の立体物の計測点座標値を除いた残りの計測点座標値に基づいて前記特定の立体物の位置する地点の地面の高さを前記第一の領域座標値に含まれる高さの座標値として算出する
ことを特徴とする請求項4記載の位置補正データ生成装置。
【請求項6】
前記位置補正データ生成装置は、さらに、
前記計測点データに基づいて複数の計測点を描画した画面を計測点領域指定画面として表示し、前記参照点データに基づいて複数の参照点を描画した画面を参照点領域指定画面として表示する領域指定画面表示部を備え、
前記領域指定入力部は、前記領域指定画面表示部によって表示された計測点領域指定画面に対して前記特定領域に対応する部分を計測点領域として指定する第一の領域指定と、前記領域指定画面表示部によって表示された参照点領域指定画面に対して前記特定領域に対応する部分を参照点領域として指定する第二の領域指定とを入力し、
前記領域座標値算出部は、前記第一の領域指定によって指定される計測点領域に描画された複数の計測点それぞれの計測点座標値に基づいて前記第一の領域座標値を算出し、前記第二の領域指定によって指定される参照点領域に描画された複数の参照点それぞれの参照点座標値に基づいて前記第二の領域座標値を算出する
ことを特徴とする請求項1から請求項5いずれかに記載の位置補正データ生成装置。
【請求項7】
前記位置補正データ生成装置は、さらに、
前記計測領域を撮像した第一の計測領域画像と第二の計測領域画像とを記憶する計測領域画像記憶部を備え、
前記領域指定画面表示部は、前記第一の計測領域画像に重ねて複数の計測点を描画して前記計測点領域指定画面を表示し、前記第二の計測領域画像に重ねて複数の参照点を描画して前記参照点領域指定画面を表示する
ことを特徴とする請求項6記載の位置補正データ生成装置。
【請求項8】
前記計測点データ記憶部は、複数の計測点データを記憶し、
前記位置補正データ生成装置は、さらに、
複数の計測点データのうち特定の計測点データ以外の計測点データを参照点データとして指定するデータ指定を入力機器から入力するデータ指定入力部を備え、
前記領域座標値算出部は、前記特定の計測点データに基づいて前記第一の領域座標値を算出し、前記データ指定によって指定される参照点データに基づいて前記第二の領域座標値を算出する
ことを特徴とする請求項1から請求項7いずれかに記載の位置補正データ生成装置。
【請求項9】
前記移動体データ記憶部は、移動体座標値の予測誤差を含む複数の移動体データを記憶し、
前記計測点データ記憶部は、複数の計測点データを複数の移動体データに対応付けて記憶し、
前記位置補正データ生成装置は、さらに、
複数の移動体データそれぞれの移動体座標値と予測誤差とを表す画面をデータ指定画面として表示するデータ指定画面表示部を備え、
前記データ指定入力部は、前記データ指定画面に対して参照点データに対応する移動体データを指定するデータ指定を入力する
ことを特徴とする請求項8記載の位置補正データ生成装置。
【請求項10】
計測機器を搭載した移動体の座標値を移動体座標値として含む移動体データを記憶する移動体データ記憶部と、
前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む計測点データを記憶する計測点データ記憶部と、
前記計測領域内の複数の地点それぞれの座標値を参照点の参照点座標値として含むデータを参照点データとして記憶する参照点データ記憶部と、
前記計測領域内の特定領域を指定する領域指定を入力機器から入力する領域指定入力部と、
前記領域指定入力部が入力した領域指定と前記計測点データ記憶部に記憶される計測点データとに基づいて前記特定領域の特定地点の座標値を第一の領域座標値として算出し、前記領域指定入力部が入力した領域指定と前記参照点データ記憶部に記憶される参照点データとに基づいて前記特定領域の前記特定地点の座標値を第二の領域座標値として算出する領域座標値算出部と、
前記領域座標値算出部によって算出された第一の領域座標値と第二の領域座標値との差を座標値誤差として算出し、算出した座標値誤差に基づいて前記移動体データに含まれる移動体座標値を補正する移動体データ補正部と
を備えることを特徴とする位置標定装置。
【請求項11】
計測機器を搭載した移動体の座標値を移動体座標値として含み、移動体座標値の予測誤差を含む複数の移動体データを記憶する移動体データ記憶部と、
前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む複数の計測点データを複数の移動体データに対応付けて記憶する計測点データ記憶部と、
前記移動体データ記憶部に記憶される複数の移動体データに基づいて前記移動体の計測経路を表す経路グラフを含んだ画面をデータ指定画面として表示するデータ指定画面表示部と、
前記データ指定画面表示部によって表示されたデータ指定画面に対して特定の移動体データを参照移動体データとして指定するデータ指定を入力機器から入力し、補正対象の移動体データに対応する計測点データと前記参照移動体データに対応する計測点データとに基づいて前記補正対象の移動体データを補正する位置標定装置に対して前記参照移動体データに対応する計測点データを参照点データとして指定するデータ指定入力部と
を備えることを特徴とするユーザインタフェース装置。
【請求項12】
前記データ指定画面表示部は、計測経路の予測誤差の大きさによって色彩が異なる経路グラフを含んだデータ指定画面を表示する
ことを特徴とする請求項11記載のユーザインタフェース装置。
【請求項13】
前記ユーザインタフェース装置は、さらに、
前記移動体データ記憶部に記憶される複数の移動体データのうち予測誤差が所定の誤差閾値より大きい移動体データを補正対象の対象移動体データとして選択し、選択した対象移動体データの予測誤差を表す誤差グラフを含んだ画面を地点指定画面として表示する地点指定画面表示部と、
前記地点指定画面表示部によって表示された地点指定画面に対して計測経路内の特定地点を指定する地点指定を入力機器から入力する地点指定入力部と、
前記地点指定入力部が入力した地点指定に基づいて前記特定地点から所定範囲内に位置する地点の移動体座標値を含んだ複数の移動体データを参照移動体データ候補として選択する参照移動体データ候補選択部とを備え、
前記データ指定画面表示部は、前記地点指定画面表示部によって選択された対象移動体データの経路グラフと、前記参照移動体データ候補選択部によって選択された参照移動体データ候補の経路グラフとを前記データ指定画面に表示する
ことを特徴とする請求項11または請求項12記載のユーザインタフェース装置。
【請求項14】
計測機器を搭載した移動体の座標値を移動体座標値として含む移動体データを記憶する移動体データ記憶部と、前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む計測点データを記憶する計測点データ記憶部と、前記計測領域内の複数の地点それぞれの座標値を参照点の参照点座標値として含むデータを参照点データとして記憶する参照点データ記憶部と、領域指定入力部と、領域座標値算出部と、移動体データ補正部とを備える位置標定装置の位置標定方法であって、
前記領域指定入力部が、前記計測領域内の特定領域を指定する領域指定を入力機器から入力し、
前記領域座標値算出部が、前記領域指定入力部が入力した領域指定と前記計測点データ記憶部に記憶される計測点データとに基づいて前記特定領域の特定地点の座標値を第一の領域座標値として算出し、前記領域指定入力部が入力した領域指定と前記参照点データ記憶部に記憶される参照点データとに基づいて前記特定領域の前記特定地点の座標値を第二の領域座標値として算出し、
前記補正データ生成部が、前記領域座標値算出部によって算出された第一の領域座標値と第二の領域座標値との差を座標値誤差として算出し、算出した座標値誤差を含んだデータを前記移動体データに含まれる移動体座標値の補正に用いる補正データとして生成する
ことを特徴とする位置補正データ生成装置の位置補正データ生成方法。
【請求項15】
計測機器を搭載した移動体の座標値を移動体座標値として含む移動体データを記憶する移動体データ記憶部と、前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む計測点データを記憶する計測点データ記憶部と、前記計測領域内の複数の地点それぞれの座標値を参照点の参照点座標値として含むデータを参照点データとして記憶する参照点データ記憶部と、領域指定入力部と、領域座標値算出部と、移動体データ補正部とを備える位置標定装置の位置標定方法であって、
前記領域指定入力部が、前記計測領域内の特定領域を指定する領域指定を入力機器から入力し、
前記領域座標値算出部が、前記領域指定入力部が入力した領域指定と前記計測点データ記憶部に記憶される計測点データとに基づいて前記特定領域の特定地点の座標値を第一の領域座標値として算出し、前記領域指定入力部が入力した領域指定と前記参照点データ記憶部に記憶される参照点データとに基づいて前記特定領域の前記特定地点の座標値を第二の領域座標値として算出し、
前記移動体データ補正部が、前記領域座標値算出部によって算出された第一の領域座標値と第二の領域座標値との差を座標値誤差として算出し、算出した座標値誤差に基づいて前記移動体データに含まれる移動体座標値を補正する
ことを特徴とする位置標定装置の位置標定方法。
【請求項16】
計測機器を搭載した移動体の座標値を移動体座標値として含み、移動体座標値の予測誤差を含む複数の移動体データを記憶する移動体データ記憶部と、前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む複数の計測点データを複数の移動体データに対応付けて記憶する計測点データ記憶部と、データ指定画面表示部と、データ指定入力部とを備えるユーザインタフェース装置の情報処理方法であって、
前記データ指定画面表示部が、前記移動体データ記憶部に記憶される複数の移動体データに基づいて前記移動体の計測経路を表す経路グラフを含んだ画面をデータ指定画面として表示し、
前記データ指定入力部が、前記データ指定画面表示部によって表示されたデータ指定画面に対して特定の移動体データを参照移動体データとして指定するデータ指定を入力機器から入力し、補正対象の移動体データに対応する計測点データと前記参照移動体データに対応する計測点データとに基づいて前記補正対象の移動体データを補正する位置標定装置に対して前記参照移動体データに対応する計測点データを参照点データとして指定する
ことを特徴とするユーザインタフェース装置の情報処理方法。
【請求項17】
計測機器を搭載した移動体の座標値を移動体座標値として含む移動体データを記憶する移動体データ記憶部と、前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む計測点データを記憶する計測点データ記憶部と、前記計測領域内の複数の地点それぞれの座標値を参照点の参照点座標値として含むデータを参照点データとして記憶する参照点データ記憶部とを備える位置補正データ生成装置を機能させる位置補正データ生成プログラムであって、
前記計測領域内の特定領域を指定する領域指定を入力機器から入力する領域指定入力部と、
前記領域指定入力部が入力した領域指定と前記計測点データ記憶部に記憶される計測点データとに基づいて前記特定領域の特定地点の座標値を第一の領域座標値として算出し、前記領域指定入力部が入力した領域指定と前記参照点データ記憶部に記憶される参照点データとに基づいて前記特定領域の前記特定地点の座標値を第二の領域座標値として算出する領域座標値算出部と、
前記領域座標値算出部によって算出された第一の領域座標値と第二の領域座標値との差を座標値誤差として算出し、算出した座標値誤差を含んだデータを前記移動体データに含まれる移動体座標値の補正に用いる補正データとして生成する補正データ生成部として位置補正データ生成装置を機能させる
ことを特徴とする位置補正データ生成プログラム。
【請求項18】
計測機器を搭載した移動体の座標値を移動体座標値として含む移動体データを記憶する移動体データ記憶部と、前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む計測点データを記憶する計測点データ記憶部と、前記計測領域内の複数の地点それぞれの座標値を参照点の参照点座標値として含むデータを参照点データとして記憶する参照点データ記憶部とを備える位置標定装置を機能させる位置標定プログラムであって、
前記計測領域内の特定領域を指定する領域指定を入力機器から入力する領域指定入力部と、
前記領域指定入力部が入力した領域指定と前記計測点データ記憶部に記憶される計測点データとに基づいて前記特定領域の特定地点の座標値を第一の領域座標値として算出し、前記領域指定入力部が入力した領域指定と前記参照点データ記憶部に記憶される参照点データとに基づいて前記特定領域の前記特定地点の座標値を第二の領域座標値として算出する領域座標値算出部と、
前記領域座標値算出部によって算出された第一の領域座標値と第二の領域座標値との差を座標値誤差として算出し、算出した座標値誤差に基づいて前記移動体データに含まれる移動体座標値を補正する移動体データ補正部として位置標定装置を機能させる
ことを特徴とする位置標定プログラム。
【請求項19】
計測機器を搭載した移動体の座標値を移動体座標値として含み、移動体座標値の予測誤差を含む複数の移動体データを記憶する移動体データ記憶部と、前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む複数の計測点データを複数の移動体データに対応付けて記憶する計測点データ記憶部とを備えるユーザインタフェース装置を機能させるユーザインタフェースプログラムであって、
前記移動体データ記憶部に記憶される複数の移動体データに基づいて前記移動体の計測経路を表す経路グラフを含んだ画面をデータ指定画面として表示するデータ指定画面表示部と、
前記データ指定画面表示部によって表示されたデータ指定画面に対して特定の移動体データを参照移動体データとして指定するデータ指定を入力機器から入力し、補正対象の移動体データに対応する計測点データと前記参照移動体データに対応する計測点データとに基づいて前記補正対象の移動体データを補正する位置標定装置に対して前記参照移動体データに対応する計測点データを参照点データとして指定するデータ指定入力部としてユーザインタフェース装置を機能させる
ことを特徴とするユーザインタフェースプログラム。
【請求項1】
計測機器を搭載した移動体の座標値を移動体座標値として含む移動体データを記憶する移動体データ記憶部と、
前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む計測点データを記憶する計測点データ記憶部と、
前記計測領域内の複数の地点それぞれの座標値を参照点の参照点座標値として含むデータを参照点データとして記憶する参照点データ記憶部と、
前記計測領域内の特定領域を指定する領域指定を入力機器から入力する領域指定入力部と、
前記領域指定入力部が入力した領域指定と前記計測点データ記憶部に記憶される計測点データとに基づいて前記特定領域の特定地点の座標値を第一の領域座標値として算出し、前記領域指定入力部が入力した領域指定と前記参照点データ記憶部に記憶される参照点データとに基づいて前記特定領域の前記特定地点の座標値を第二の領域座標値として算出する領域座標値算出部と、
前記領域座標値算出部によって算出された第一の領域座標値と第二の領域座標値との差を座標値誤差として算出し、算出した座標値誤差を含んだデータを前記移動体データに含まれる移動体座標値の補正に用いる補正データとして生成する補正データ生成部と
を備えることを特徴とする位置補正データ生成装置。
【請求項2】
前記領域座標値算出部は、前記計測点データに含まれる計測点座標値のうち前記特定領域の複数の計測点それぞれの計測点座標値に基づいて前記第一の領域座標値を算出し、前記参照点データに含まれる参照点座標値のうち前記特定領域の複数の参照点それぞれの参照点座標値に基づいて前記第二の領域座標値を算出する
ことを特徴とする請求項1記載の位置補正データ生成装置。
【請求項3】
前記領域座標値算出部は、前記特定領域の中心の地点の座標値として前記第一の領域座標値と前記第二の領域座標値とを算出する
ことを特徴とする請求項2記載の位置補正データ生成装置。
【請求項4】
前記領域座標値算出部は、特定の立体物の表面を計測した複数の計測点座標値に基づいて前記特定の立体物の断面中心の座標値を前記第一の領域座標値として算出し、前記特定の立体物の表面を計測した複数の参照点座標値に基づいて前記特定の立体物の断面中心の座標値を前記第二の領域座標値として算出する
ことを特徴とする請求項3記載の位置補正データ生成装置。
【請求項5】
前記領域座標値算出部は、前記特定の立体物の断面中心の座標値のうち高さを除いた二次元の座標値を前記第一の領域座標値に含まれる二次元座標値として算出し、前記特定の立体物の計測点座標値を除いた残りの計測点座標値に基づいて前記特定の立体物の位置する地点の地面の高さを前記第一の領域座標値に含まれる高さの座標値として算出する
ことを特徴とする請求項4記載の位置補正データ生成装置。
【請求項6】
前記位置補正データ生成装置は、さらに、
前記計測点データに基づいて複数の計測点を描画した画面を計測点領域指定画面として表示し、前記参照点データに基づいて複数の参照点を描画した画面を参照点領域指定画面として表示する領域指定画面表示部を備え、
前記領域指定入力部は、前記領域指定画面表示部によって表示された計測点領域指定画面に対して前記特定領域に対応する部分を計測点領域として指定する第一の領域指定と、前記領域指定画面表示部によって表示された参照点領域指定画面に対して前記特定領域に対応する部分を参照点領域として指定する第二の領域指定とを入力し、
前記領域座標値算出部は、前記第一の領域指定によって指定される計測点領域に描画された複数の計測点それぞれの計測点座標値に基づいて前記第一の領域座標値を算出し、前記第二の領域指定によって指定される参照点領域に描画された複数の参照点それぞれの参照点座標値に基づいて前記第二の領域座標値を算出する
ことを特徴とする請求項1から請求項5いずれかに記載の位置補正データ生成装置。
【請求項7】
前記位置補正データ生成装置は、さらに、
前記計測領域を撮像した第一の計測領域画像と第二の計測領域画像とを記憶する計測領域画像記憶部を備え、
前記領域指定画面表示部は、前記第一の計測領域画像に重ねて複数の計測点を描画して前記計測点領域指定画面を表示し、前記第二の計測領域画像に重ねて複数の参照点を描画して前記参照点領域指定画面を表示する
ことを特徴とする請求項6記載の位置補正データ生成装置。
【請求項8】
前記計測点データ記憶部は、複数の計測点データを記憶し、
前記位置補正データ生成装置は、さらに、
複数の計測点データのうち特定の計測点データ以外の計測点データを参照点データとして指定するデータ指定を入力機器から入力するデータ指定入力部を備え、
前記領域座標値算出部は、前記特定の計測点データに基づいて前記第一の領域座標値を算出し、前記データ指定によって指定される参照点データに基づいて前記第二の領域座標値を算出する
ことを特徴とする請求項1から請求項7いずれかに記載の位置補正データ生成装置。
【請求項9】
前記移動体データ記憶部は、移動体座標値の予測誤差を含む複数の移動体データを記憶し、
前記計測点データ記憶部は、複数の計測点データを複数の移動体データに対応付けて記憶し、
前記位置補正データ生成装置は、さらに、
複数の移動体データそれぞれの移動体座標値と予測誤差とを表す画面をデータ指定画面として表示するデータ指定画面表示部を備え、
前記データ指定入力部は、前記データ指定画面に対して参照点データに対応する移動体データを指定するデータ指定を入力する
ことを特徴とする請求項8記載の位置補正データ生成装置。
【請求項10】
計測機器を搭載した移動体の座標値を移動体座標値として含む移動体データを記憶する移動体データ記憶部と、
前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む計測点データを記憶する計測点データ記憶部と、
前記計測領域内の複数の地点それぞれの座標値を参照点の参照点座標値として含むデータを参照点データとして記憶する参照点データ記憶部と、
前記計測領域内の特定領域を指定する領域指定を入力機器から入力する領域指定入力部と、
前記領域指定入力部が入力した領域指定と前記計測点データ記憶部に記憶される計測点データとに基づいて前記特定領域の特定地点の座標値を第一の領域座標値として算出し、前記領域指定入力部が入力した領域指定と前記参照点データ記憶部に記憶される参照点データとに基づいて前記特定領域の前記特定地点の座標値を第二の領域座標値として算出する領域座標値算出部と、
前記領域座標値算出部によって算出された第一の領域座標値と第二の領域座標値との差を座標値誤差として算出し、算出した座標値誤差に基づいて前記移動体データに含まれる移動体座標値を補正する移動体データ補正部と
を備えることを特徴とする位置標定装置。
【請求項11】
計測機器を搭載した移動体の座標値を移動体座標値として含み、移動体座標値の予測誤差を含む複数の移動体データを記憶する移動体データ記憶部と、
前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む複数の計測点データを複数の移動体データに対応付けて記憶する計測点データ記憶部と、
前記移動体データ記憶部に記憶される複数の移動体データに基づいて前記移動体の計測経路を表す経路グラフを含んだ画面をデータ指定画面として表示するデータ指定画面表示部と、
前記データ指定画面表示部によって表示されたデータ指定画面に対して特定の移動体データを参照移動体データとして指定するデータ指定を入力機器から入力し、補正対象の移動体データに対応する計測点データと前記参照移動体データに対応する計測点データとに基づいて前記補正対象の移動体データを補正する位置標定装置に対して前記参照移動体データに対応する計測点データを参照点データとして指定するデータ指定入力部と
を備えることを特徴とするユーザインタフェース装置。
【請求項12】
前記データ指定画面表示部は、計測経路の予測誤差の大きさによって色彩が異なる経路グラフを含んだデータ指定画面を表示する
ことを特徴とする請求項11記載のユーザインタフェース装置。
【請求項13】
前記ユーザインタフェース装置は、さらに、
前記移動体データ記憶部に記憶される複数の移動体データのうち予測誤差が所定の誤差閾値より大きい移動体データを補正対象の対象移動体データとして選択し、選択した対象移動体データの予測誤差を表す誤差グラフを含んだ画面を地点指定画面として表示する地点指定画面表示部と、
前記地点指定画面表示部によって表示された地点指定画面に対して計測経路内の特定地点を指定する地点指定を入力機器から入力する地点指定入力部と、
前記地点指定入力部が入力した地点指定に基づいて前記特定地点から所定範囲内に位置する地点の移動体座標値を含んだ複数の移動体データを参照移動体データ候補として選択する参照移動体データ候補選択部とを備え、
前記データ指定画面表示部は、前記地点指定画面表示部によって選択された対象移動体データの経路グラフと、前記参照移動体データ候補選択部によって選択された参照移動体データ候補の経路グラフとを前記データ指定画面に表示する
ことを特徴とする請求項11または請求項12記載のユーザインタフェース装置。
【請求項14】
計測機器を搭載した移動体の座標値を移動体座標値として含む移動体データを記憶する移動体データ記憶部と、前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む計測点データを記憶する計測点データ記憶部と、前記計測領域内の複数の地点それぞれの座標値を参照点の参照点座標値として含むデータを参照点データとして記憶する参照点データ記憶部と、領域指定入力部と、領域座標値算出部と、移動体データ補正部とを備える位置標定装置の位置標定方法であって、
前記領域指定入力部が、前記計測領域内の特定領域を指定する領域指定を入力機器から入力し、
前記領域座標値算出部が、前記領域指定入力部が入力した領域指定と前記計測点データ記憶部に記憶される計測点データとに基づいて前記特定領域の特定地点の座標値を第一の領域座標値として算出し、前記領域指定入力部が入力した領域指定と前記参照点データ記憶部に記憶される参照点データとに基づいて前記特定領域の前記特定地点の座標値を第二の領域座標値として算出し、
前記補正データ生成部が、前記領域座標値算出部によって算出された第一の領域座標値と第二の領域座標値との差を座標値誤差として算出し、算出した座標値誤差を含んだデータを前記移動体データに含まれる移動体座標値の補正に用いる補正データとして生成する
ことを特徴とする位置補正データ生成装置の位置補正データ生成方法。
【請求項15】
計測機器を搭載した移動体の座標値を移動体座標値として含む移動体データを記憶する移動体データ記憶部と、前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む計測点データを記憶する計測点データ記憶部と、前記計測領域内の複数の地点それぞれの座標値を参照点の参照点座標値として含むデータを参照点データとして記憶する参照点データ記憶部と、領域指定入力部と、領域座標値算出部と、移動体データ補正部とを備える位置標定装置の位置標定方法であって、
前記領域指定入力部が、前記計測領域内の特定領域を指定する領域指定を入力機器から入力し、
前記領域座標値算出部が、前記領域指定入力部が入力した領域指定と前記計測点データ記憶部に記憶される計測点データとに基づいて前記特定領域の特定地点の座標値を第一の領域座標値として算出し、前記領域指定入力部が入力した領域指定と前記参照点データ記憶部に記憶される参照点データとに基づいて前記特定領域の前記特定地点の座標値を第二の領域座標値として算出し、
前記移動体データ補正部が、前記領域座標値算出部によって算出された第一の領域座標値と第二の領域座標値との差を座標値誤差として算出し、算出した座標値誤差に基づいて前記移動体データに含まれる移動体座標値を補正する
ことを特徴とする位置標定装置の位置標定方法。
【請求項16】
計測機器を搭載した移動体の座標値を移動体座標値として含み、移動体座標値の予測誤差を含む複数の移動体データを記憶する移動体データ記憶部と、前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む複数の計測点データを複数の移動体データに対応付けて記憶する計測点データ記憶部と、データ指定画面表示部と、データ指定入力部とを備えるユーザインタフェース装置の情報処理方法であって、
前記データ指定画面表示部が、前記移動体データ記憶部に記憶される複数の移動体データに基づいて前記移動体の計測経路を表す経路グラフを含んだ画面をデータ指定画面として表示し、
前記データ指定入力部が、前記データ指定画面表示部によって表示されたデータ指定画面に対して特定の移動体データを参照移動体データとして指定するデータ指定を入力機器から入力し、補正対象の移動体データに対応する計測点データと前記参照移動体データに対応する計測点データとに基づいて前記補正対象の移動体データを補正する位置標定装置に対して前記参照移動体データに対応する計測点データを参照点データとして指定する
ことを特徴とするユーザインタフェース装置の情報処理方法。
【請求項17】
計測機器を搭載した移動体の座標値を移動体座標値として含む移動体データを記憶する移動体データ記憶部と、前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む計測点データを記憶する計測点データ記憶部と、前記計測領域内の複数の地点それぞれの座標値を参照点の参照点座標値として含むデータを参照点データとして記憶する参照点データ記憶部とを備える位置補正データ生成装置を機能させる位置補正データ生成プログラムであって、
前記計測領域内の特定領域を指定する領域指定を入力機器から入力する領域指定入力部と、
前記領域指定入力部が入力した領域指定と前記計測点データ記憶部に記憶される計測点データとに基づいて前記特定領域の特定地点の座標値を第一の領域座標値として算出し、前記領域指定入力部が入力した領域指定と前記参照点データ記憶部に記憶される参照点データとに基づいて前記特定領域の前記特定地点の座標値を第二の領域座標値として算出する領域座標値算出部と、
前記領域座標値算出部によって算出された第一の領域座標値と第二の領域座標値との差を座標値誤差として算出し、算出した座標値誤差を含んだデータを前記移動体データに含まれる移動体座標値の補正に用いる補正データとして生成する補正データ生成部として位置補正データ生成装置を機能させる
ことを特徴とする位置補正データ生成プログラム。
【請求項18】
計測機器を搭載した移動体の座標値を移動体座標値として含む移動体データを記憶する移動体データ記憶部と、前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む計測点データを記憶する計測点データ記憶部と、前記計測領域内の複数の地点それぞれの座標値を参照点の参照点座標値として含むデータを参照点データとして記憶する参照点データ記憶部とを備える位置標定装置を機能させる位置標定プログラムであって、
前記計測領域内の特定領域を指定する領域指定を入力機器から入力する領域指定入力部と、
前記領域指定入力部が入力した領域指定と前記計測点データ記憶部に記憶される計測点データとに基づいて前記特定領域の特定地点の座標値を第一の領域座標値として算出し、前記領域指定入力部が入力した領域指定と前記参照点データ記憶部に記憶される参照点データとに基づいて前記特定領域の前記特定地点の座標値を第二の領域座標値として算出する領域座標値算出部と、
前記領域座標値算出部によって算出された第一の領域座標値と第二の領域座標値との差を座標値誤差として算出し、算出した座標値誤差に基づいて前記移動体データに含まれる移動体座標値を補正する移動体データ補正部として位置標定装置を機能させる
ことを特徴とする位置標定プログラム。
【請求項19】
計測機器を搭載した移動体の座標値を移動体座標値として含み、移動体座標値の予測誤差を含む複数の移動体データを記憶する移動体データ記憶部と、前記移動体を用いて計測した座標値であって計測領域内の複数の計測点それぞれの座標値を計測点座標値として含む複数の計測点データを複数の移動体データに対応付けて記憶する計測点データ記憶部とを備えるユーザインタフェース装置を機能させるユーザインタフェースプログラムであって、
前記移動体データ記憶部に記憶される複数の移動体データに基づいて前記移動体の計測経路を表す経路グラフを含んだ画面をデータ指定画面として表示するデータ指定画面表示部と、
前記データ指定画面表示部によって表示されたデータ指定画面に対して特定の移動体データを参照移動体データとして指定するデータ指定を入力機器から入力し、補正対象の移動体データに対応する計測点データと前記参照移動体データに対応する計測点データとに基づいて前記補正対象の移動体データを補正する位置標定装置に対して前記参照移動体データに対応する計測点データを参照点データとして指定するデータ指定入力部としてユーザインタフェース装置を機能させる
ことを特徴とするユーザインタフェースプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−242318(P2012−242318A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−114572(P2011−114572)
【出願日】平成23年5月23日(2011.5.23)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(899000068)学校法人早稲田大学 (602)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月23日(2011.5.23)
【出願人】(000006013)三菱電機株式会社 (33,312)
【出願人】(899000068)学校法人早稲田大学 (602)
【Fターム(参考)】
[ Back to top ]