
位置補正装置及び方法、並びに運転支援装置
【課題】自動車等の車両の走行位置を正しい位置に補正する。
【解決手段】位置補正装置(100)は、運転者の減速行動を車両が走行している場所情報と関連づけて学習する学習手段(120)と、学習された減速行動のうち、場所情報が同じであればバラツキが所定の範囲内となる行動を特徴点として抽出する抽出手段(150)と、場所情報が同じである地点を走行する場合に、運転者の特徴点を検出する検出手段(140)と、検出された特徴点及び学習された減速行動から抽出された特徴点を互いに比較することで、車両の位置補正を行う補正手段(160)とを備える。
【解決手段】位置補正装置(100)は、運転者の減速行動を車両が走行している場所情報と関連づけて学習する学習手段(120)と、学習された減速行動のうち、場所情報が同じであればバラツキが所定の範囲内となる行動を特徴点として抽出する抽出手段(150)と、場所情報が同じである地点を走行する場合に、運転者の特徴点を検出する検出手段(140)と、検出された特徴点及び学習された減速行動から抽出された特徴点を互いに比較することで、車両の位置補正を行う補正手段(160)とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば自動車等の車両において、車両の走行位置を補正して正確なものとする位置補正装置及び方法、並びに車両の位置情報を利用して運転支援制御を行う運転支援装置の技術分野に関する。
【背景技術】
【0002】
この種の装置として、カーブや交差点等に進入しようとする車両の現在位置を、高精度で検出しようとするものが知られている。例えば特許文献1では、道路の形状と車両の向きとを互いに比較することで、カーブに進入する位置を旋回初期段階で把握して、車両の位置を補正するという技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平8−292040号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、カーブや交差点等における旋回行動を取り始めるタイミングには、運転者や場所等の各種条件によってある程度のバラツキが存在しているため、検出される位置の精度が低くなってしまうおそれがある。即ち、上述した技術では、走行中の車両の正確な位置を検出することが困難であるという技術的問題点がある。
【0005】
本発明は、例えば上述した問題点に鑑みなされたものであり、走行中の車両の位置を正確に検出することが可能な位置補正装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明の位置補正装置は上記課題を解決するために、運転者の減速行動を車両が走行している場所情報と関連づけて学習する学習手段と、前記学習された減速行動のうち、前記場所情報が同じであればバラツキが所定の範囲内となる行動を特徴点として抽出する抽出手段と、前記車両が、前記場所情報が同じである地点を走行する場合に、前記運転者の前記特徴点を検出する検出手段と、前記検出された特徴点及び前記学習された減速行動から抽出された特徴点を互いに比較することで、前記車両の位置補正を行う補正手段とを備える。
【0007】
本発明の位置補正装置は、例えば自動車等の車両に搭載される。そして、その動作時には、先ず運転者の減速行動が、車両が走行している場所情報と関連づけて学習される。即ち、運転者の減速行動が、走行中のどの地点で行われたかが学習(言い換えれば、記憶)される。尚、ここでの「減速行動」とは、運転者が減速時に行う各種操作或いは挙動を包括する概念であり、例えばブレーキペダルやハンドルの操作タイミングや操作量等である。また「場所情報」は、車両の走行位置を示すものであり、減速行動と結びつけることができる程度に具体化された情報である。場所情報は、例えば車両の走行している座標の他、走行中の道路の条件(例えば、カーブや交差点であること等)を含む。
【0008】
上述した学習によれば、車両の運転者が、どのような場所を走行する際に、どのような減速行動をとるのかを知ることができる。具体的には、カーブのどの位置で、どの程度ハンドルやブレーキを操作するか、或いは交差点のどの位置で車速が最小になるように減速するか等を学習することができる。尚、減速行動の学習は、典型的には、カーブの入口や交差点の手前等、運転者が減速行動をとるであろうと予測される地点から開始される。
【0009】
続いて、本発明の位置補正装置では、学習された減速行動のうち、場所情報が同じであればバラツキが所定の範囲内となる行動が特徴点として抽出される。尚、ここでの「場所情報が同じ」とは、典型的には、車両が同じ場所を走行している状態を指すが、例えばカーブの度合いや車幅等、道路条件が同じ場合も含まれる。また「同じ」とは、場所情報が完全に一致する場合を含む他、道路条件が同じと見なせる程度に(即ち、後述する本発明の効果が得られる程度に)近い状態であることを意味している。即ち、場所情報が完全に一致しない場合であっても、場所情報が近い場合であれば相応の効果が得られる。「所定の範囲」は、ある減速行動の一つを、運転者の特徴点として抽出できる程度にバラツキが少ないと判定するための閾値であり、理論的或いは実験的、経験的に求められ、予め設定されている。
【0010】
特徴点の抽出において、学習された減速行動のタイミングや操作量、或いは場所情報は、誤差を含む場合がある。しかしながら、このような誤差は、学習回数を増やすことで小さくすることができる。よって、上述した学習は、有効な特徴点を抽出できるようになるまで複数回行われることが望ましい。また、抽出される特徴点は、複数であっても構わない。
【0011】
特徴点の抽出後は、車両が場所情報の同じである地点(即ち、既に学習済みの地点)を走行する場合に、現在の運転者の特徴点が検出される。特徴点が検出されると、検出された特徴点及び学習された減速行動から抽出された特徴点が互いに比較される。即ち、現在運転者によって行われている特徴点である減速行動と、学習された減速行動とが比較される。より具体的には、操作タイミングや操作量等の特徴点のパラメータが互いに比較される。
【0012】
ここで、特徴点は場所情報が同じであればバラツキが所定の範囲内である行動なので、検出した特徴点と学習された特徴点を比較することで、現在の車両の位置を極めて正確に導き出すことができる。即ち、検出された特徴点のパラメータの値から、学習された特徴点が同様のパラメータとなる地点を、現在車両が走行していると判定できる。従って、例えば高精度GPS(Global Positioning System)のような、極めて高い精度で位置情報を取得する手段を備えていなくとも、車両の位置情報が正確な位置に補正される。
【0013】
以上説明したように、本発明の位置補正装置によれば、場所が同じであれば安定したパラメータである特徴点を抽出することで、走行中の車両の位置を正確に検出することが可能である。
【0014】
本発明の車両の制御装置の一態様では、前記抽出手段は、少なくとも前記運転者による操舵角を前記特徴点として抽出する
この態様によれば、本願発明者の研究によって比較的安定傾向にあると判明している操舵角(即ち、ハンドルの操作量)が特徴点として抽出されるため、より正確な位置補正を行うことが可能となる。尚、操舵角以外の特徴点がある場合には、操舵角と組み合わせて用いられることで、更に正確な位置情報の補正が可能である。
【0015】
本発明の車両の制御装置の他の態様では、前記運転者の認識を行う運転者認識手段を更に備え、前記学習手段は、前記運転者毎に減速行動を学習する。
【0016】
この態様によれば、同じ車両を複数の運転者が使用する場合に、例えば顔認証やキー登録によって、車両を運転している運転者を認識できるように構成される。そして、減速行動の学習は運転者毎に行われる。従って、その後の特徴点の抽出や位置補正も運転者毎に行われることとなり、一の運転者が運転中に学習されたデータが、他の運転者の運転中の位置補正に用いられることはない。
【0017】
本願発明者の研究によれば、特徴点である減速行動の操作タイミングや操作量は、運転者毎に異なることが判明している。よって、上述したように、運転者毎に減速行動を学習するようにすれば、より好適に車両の位置補正を行うことができる。
【0018】
本発明の位置補正方法は上記課題を解決するために、運転者の減速行動を車両が走行している場所情報と関連づけて学習する学習工程と、前記学習された減速行動のうち、前記場所情報が同じであればバラツキが所定の範囲内となる行動を特徴点として抽出する抽出工程と、前記車両が、前記場所情報が同じである地点を走行する場合に、前記運転者の前記特徴点を検出する検出工程と、前記検出された特徴点及び前記学習された減速行動から抽出された特徴点を互いに比較することで、前記車両の位置補正を行う補正工程とを備える。
【0019】
本発明の位置補正方法によれば、学習された減速行動から、場所が同じであれば安定したパラメータである特徴点が抽出されるため、本発明の位置補正装置と同様に走行中の車両の位置を正確に検出することが可能である。
【0020】
尚、本発明の位置補正方法においても、上述した本発明の位置補正装置における各種態様と同様の各種態様を採ることが可能である。
【0021】
本発明の運転支援装置は上記課題を解決するために、上述した本発明の位置補正装置(但し、その各種態様も含む)と、前記位置補正装置によって補正された位置に基づいて、前記車両の運転支援制御を行う支援制御部とを備える。
【0022】
本発明の運転支援装置によれば、本発明の位置補正装置によって車両の位置情報が極めて正確なものに補正されているため、例えば自動減速制御等の運転支援を好適に実行することができる。
【0023】
本発明の作用及び他の利得は次に説明する発明を実施するための形態から明らかにされる。
【図面の簡単な説明】
【0024】
【図1】実施形態に係る位置補正装置の全体構成を示すブロック図である。
【図2】実施形態に係る位置補正装置による学習動作の流れを示すフローチャートである。
【図3】交差点を左折する際の車両の動きを概略的に示す上面図である。
【図4】車両が交差点を左折する際の各種パラメータの変化を示すグラフである。
【図5】ハンドル操作のタイミングを運転手別に示すグラフである。
【図6】ブレーキ操作のタイミングを運転者別に示すグラフである。
【図7】実施形態に係る位置補正装置による位置補正動作の流れを示すフローチャートである。
【発明を実施するための形態】
【0025】
以下では、本発明の実施形態について図を参照しつつ説明する。尚、以下では、本発明の位置補正装置が、車両の運転支援制御を行う運転支援制御装置に適用される場合について説明する。
【0026】
先ず、本実施形態に係る位置補正装置の構成について、図1を参照して説明する。ここに図1は、本実施形態に係る位置補正装置の全体構成を示すブロック図である。
【0027】
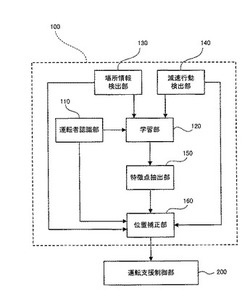
図1において、本実施形態に係る位置補正装置100は、運転者認識部110と、学習部120と、場所情報検出部130と、減速行動検出部140、特徴点抽出部150と、位置補正部160とを備えて構成されている。
【0028】
運転者認識部110は、本発明の「運転者認識手段」の一例であり、例えば顔認証やキー登録等によって運転者を認識する。運転者認識部110を備えることで、同一の車両を複数人が使用する場合に、現在の運転者を認識することが可能となる。
【0029】
学習部120は、本発明の「学習手段」の一例であり、後述する場所情報検出部130において検出される場所情報、及び減速行動検出部140において検出される運転者の減速行動を互いに関連づけて学習する。学習部120は、例えば車両に搭載されるカーナビゲーションシステムが有するHDD(Hard Disc Drive)や、通信で接続するセンタ側のサーバ等に学習内容を記憶する。
【0030】
場所情報検出部130は、例えばGPSや車載カメラ等を含んで構成されており、車両が走行する位置、或いは道路条件等を含む場所情報を検出する。
【0031】
減速行動検出部140は、運転者による減速行動の際に操作される各種部位に取り付けられたセンサ等で構成されており、例えばブレーキ操作やハンドル操作のタイミングや操作量を検出する。
【0032】
特徴点抽出部150は、本発明の「抽出手段」の一例であり、例えば演算回路やメモリ等を含んで構成されている。特徴点抽出部150hは、学習部120において学習された減速行動から、場所によって変化しない特徴点を検出する。
【0033】
位置補正部160は、本発明の「補正手段」の一例であり、例えば演算回路やメモリ等を含んで構成されている。位置補正部160は、場所情報検出部130において検出される場所情報、及び減速行動検出部140において検出される運転者の減速行動と、特徴点抽出部150において抽出された特徴点とを比較することで、車両の位置を補正する。この位置補正動作については、後に詳述する。
【0034】
本実施形態に係る位置補正装置100によって補正された位置情報は、運転支援装置における運転支援制御部200に出力される。運転支援制御部200は、位置補正装置100において補正された位置情報を用いて、車両の運転支援に係る制御を行うことが可能に構成されている。
【0035】
次に、本実施形態に係る位置補正装置の動作及び効果について、図1に加えて、図2から図7を参照して説明する。尚、ここでは、本実施形態に係る位置補正装置の動作のうち、本実施形態の効果を特徴的に示す部分を詳細に説明し、その他の動作については適宜説明を省略するものとする。
【0036】
先ず、本実施形態に係る位置補正装置の学習動作について、図2から図6を参照して説明する。ここに図2は、本実施形態に係る位置補正装置による学習動作の流れを示すフローチャートである。また図3は、交差点を左折する際の車両の動きを概略的に示す上面図であり、図4は、車両が交差点を左折する際の各種パラメータの変化を示すグラフである。図5は、ハンドル操作のタイミングを運転手別に示すグラフであり、図6は、ブレーキ操作のタイミングを運転者別に示すグラフである。
【0037】
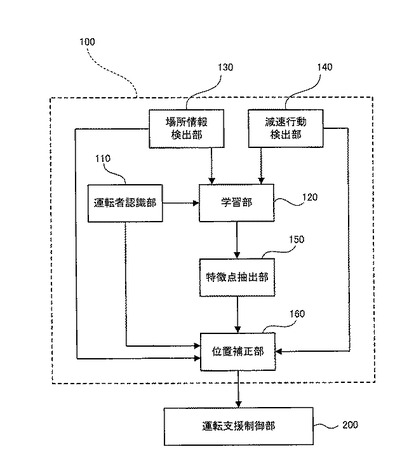
図2において、本実施形態に係る位置補正装置100の学習動作時には、先ず運転者認識部110において、車両の運転者が認識される(ステップS01)。即ち、現在車両を運転しているのが誰であるかが認識される。運転者が認識されると、その情報は学習部120に出力され、以降は認識された運転者別での学習動作が行われることになる。このような運転者の認識動作は、例えばエンジン始動時等に行われる。
【0038】
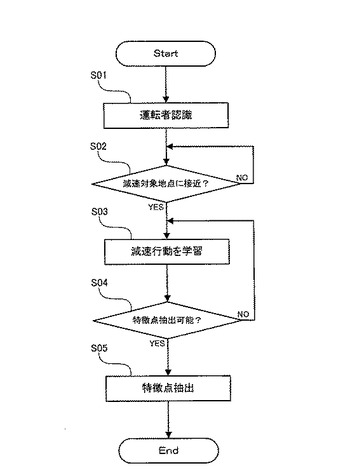
続いて、場所情報検出部130によって、走行中の車両が、減速対象地点に接近中であるか否かが判定される(ステップS02)。尚、「減速対象地点」とは、カーブや交差点のように、運転者による減速行動が行われるであろうと推測される地点であり、どのような場所を減速対象地点とするかは、予め設定されている。また、減速対象地点にどの程度近づいた場合を「接近している」とするかは、予め適切な閾値を設定しておけばよい。以下では、図3に示すように、車両500が交差点を左折しようとする場合について説明する。
【0039】
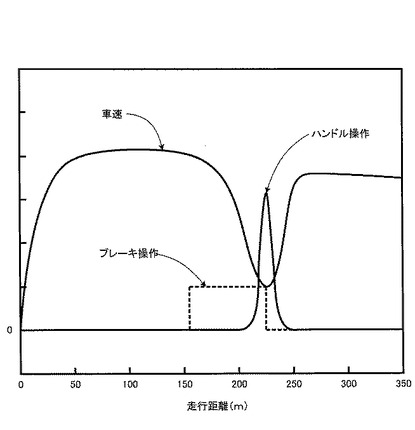
図4において、車両500が交差点を左折する際には、車両500が交差点に達する前から運転者によるブレーキ操作が開始され、車速が一時的に低下する。具体的には、車両500の走行距離が150mを過ぎた地点で、運転者によるブレーキ操作が行われ、車速が大きく低下している。
【0040】
運転者は、上述したブレーキ操作を行うと共に、ハンドル操作も並行して行う。具体的には、車両500が十分に減速され走行距離が200mを過ぎた地点で、ハンドルが大きく左にきられている。その後、ブレーキ操作及びハンドル操作が終了されると共に、アクセル操作等がなされ、交差点を左折し終わった車両500は加速される。
【0041】
図2に戻り、本実施形態に係る位置補正装置100では、車両500が減速対象地点に接近していると判定されると(ステップS02:YES)、学習部120において、車両500の走行する場所情報と、運転者による減速行動とが互いに関連づけて学習される(ステップS03)。具体的には、場所情報検出部130において検出された場所情報(車両の走行距離や座標等)と、減速行動検出部140において検出された減速行動(例えば、ブレーキ操作やハンドル操作のタイミング等)とが、互いに関連づけて学習される。
【0042】
ここで、本願発明者の研究によれば、上述した運転者の減速行動には、同じ場所を走行する場合に大きく変化するものと、ほとんど変化しないものとがある。
【0043】
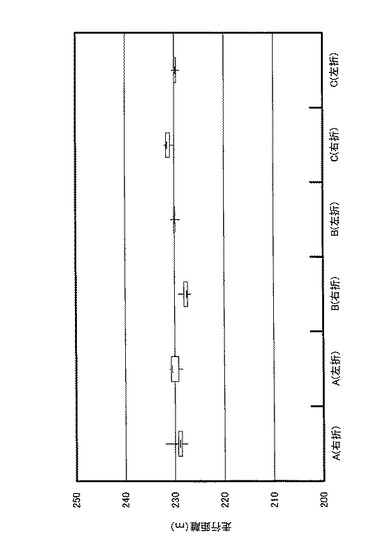
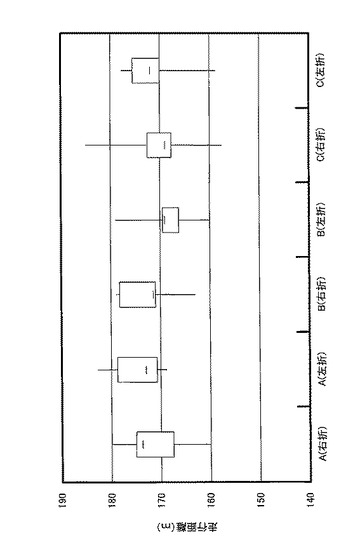
図5及び図6において、ハンドル操作のタイミングは、運転者A、B及びCによって夫々異なるものの、運転者が同じであれば比較的安定した値となる。例えば図5に示すデータでは、右折の場合、左折の場合のいずれも、誤差は1m以内である。一方で、ブレーキ操作のタイミングは、運転者A、B及びCによって夫々異なると共に、運転者が同じであっても大きなバラツキを有している。
【0044】
本実施形態に係る位置補正装置100は、上述したハンドル操作のように、場所が同じであれば大きく変化しないようなパラメータを、特徴点として抽出する。
【0045】
再び図2に戻り、特徴点を抽出する際には、先ず特徴点抽出部150において、特徴点を抽出できる程度に場所情報及び減速行動が学習されているか否かが判定される(ステップS04)。即ち、特徴点を判別できる程度に十分なデータ量が学習されているか否かが判定される。具体的には、例えばN+1のデータを加味しても平均及び分散が閾値以上変化しない場合等に特徴点が抽出可能であると判定する。
【0046】
特徴点が抽出可能であると判定された場合(ステップS04:YES)、特徴点抽出部150は、特徴点を抽出し(ステップS05)、学習動作は終了する。尚、抽出される特徴点は一つであってもよいし、二以上であっても構わない。
【0047】
一方で、特徴点が抽出可能でないと判定された場合(ステップS04:NO)、再びステップS03の場所情報及び減速行動の学習が行われ、データが蓄積される。即ち、場所情報及び減速行動の学習は、特徴点を検出できるようになるまで繰り返し行われる。
【0048】
次に、本実施形態に係る位置補正装置の位置補正動作について、図7を参照して説明する。ここに図7は、本実施形態に係る位置補正装置による位置補正動作の流れを示すフローチャートである。尚、以下では、上述した学習動作が終了した状態で車両の運転が開始される場合を例にとり説明する。
【0049】
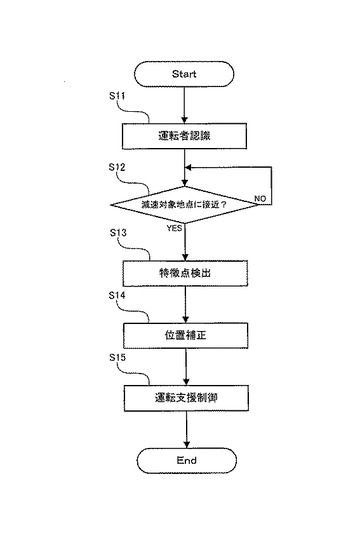
図7において、本実施形態に係る位置補正装置100の位置補正動作時には、先ず運転者認識部110において、車両500の運転者が認識される(ステップS11)。即ち、学習動作時のステップS01と同様に、現在車両500を運転しているのが誰であるかが認識される。運転者が認識されると、その情報は位置補正部160に出力され、以降は認識された運転者別での位置補正動作が行われることになる。
【0050】
続いて、場所情報検出部130によって、走行中の車両500が、減速対象地点に接近中であるか否かが判定される(ステップS12)。尚、ここでの減速対象地点は、学習済み(即ち、運転者の特徴点を抽出済み)の減速対象地点である。
【0051】
車両500が減速対象地点に接近していると判定されると(ステップS12:YES)、減速行動検出部140において、特徴点として抽出された減速行動が検出される(ステップS13)。即ち、ここでの減速行動検出部140は、本発明の「検出手段」の一例である。
【0052】
特徴点が検出されると、検出された特徴点及び学習された減速行動から抽出された特徴点が互いに比較される。即ち、現在運転者によって行われている特徴点である減速行動と、学習された減速行動とが比較される。
【0053】
ここで、特徴点は場所情報が同じであれば安定した値となる減速行動なので、検出した特徴点と学習された特徴点を比較することで、現在の車両500の位置を極めて正確に導き出すことができる。即ち、検出された特徴点のパラメータの値から、学習された特徴点が同様のパラメータとなる地点を、現在車両500が走行していると判定できる。これを利用して、位置補正部160は、車両500の位置を補正する(ステップS14)。
【0054】
上述した位置補正動作によれば、車両500の位置情報をcmオーダーで検出することも可能である。尚、正確な位置情報は高精度なGPS等でも検出することが可能であるが、この場合コストが非常に高くなってしまう。これに対し、本実施形態に係る位置補正装置100は、比較的低コストで実現することが可能である。
【0055】
本発明の位置補正装置100によって補正された車両500の位置情報は、運転支援制御部200へ出力される。そして運転支援制御部200では、補正された車両500の位置情報を用いて各種運転支援制御が行われる(ステップS15)。補正された車両500の位置情報は、特徴点を用いることによって極めて正確な値となっているため、運転支援制御は好適に実行される。
【0056】
以上説明したように、本実施形態に係る位置補正装置によれば、場所が同じであれば安定したパラメータである特徴点を抽出することで、走行中の車両の位置を正確に検出することが可能である。
【0057】
本発明は、上述した実施形態に限られるものではなく、特許請求の範囲及び明細書全体から読み取れる発明の要旨或いは思想に反しない範囲で適宜変更可能であり、そのような変更を伴う車両の制御装置もまた本発明の技術的範囲に含まれるものである。
【符号の説明】
【0058】
100…位置補正装置、110…運転者認識部、120…学習部、130…場所情報検出部、140…減速行動検出部、150…特徴点検出部、160…位置補正部、200…運転支援制御部、500…車両
【技術分野】
【0001】
本発明は、例えば自動車等の車両において、車両の走行位置を補正して正確なものとする位置補正装置及び方法、並びに車両の位置情報を利用して運転支援制御を行う運転支援装置の技術分野に関する。
【背景技術】
【0002】
この種の装置として、カーブや交差点等に進入しようとする車両の現在位置を、高精度で検出しようとするものが知られている。例えば特許文献1では、道路の形状と車両の向きとを互いに比較することで、カーブに進入する位置を旋回初期段階で把握して、車両の位置を補正するという技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平8−292040号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、カーブや交差点等における旋回行動を取り始めるタイミングには、運転者や場所等の各種条件によってある程度のバラツキが存在しているため、検出される位置の精度が低くなってしまうおそれがある。即ち、上述した技術では、走行中の車両の正確な位置を検出することが困難であるという技術的問題点がある。
【0005】
本発明は、例えば上述した問題点に鑑みなされたものであり、走行中の車両の位置を正確に検出することが可能な位置補正装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明の位置補正装置は上記課題を解決するために、運転者の減速行動を車両が走行している場所情報と関連づけて学習する学習手段と、前記学習された減速行動のうち、前記場所情報が同じであればバラツキが所定の範囲内となる行動を特徴点として抽出する抽出手段と、前記車両が、前記場所情報が同じである地点を走行する場合に、前記運転者の前記特徴点を検出する検出手段と、前記検出された特徴点及び前記学習された減速行動から抽出された特徴点を互いに比較することで、前記車両の位置補正を行う補正手段とを備える。
【0007】
本発明の位置補正装置は、例えば自動車等の車両に搭載される。そして、その動作時には、先ず運転者の減速行動が、車両が走行している場所情報と関連づけて学習される。即ち、運転者の減速行動が、走行中のどの地点で行われたかが学習(言い換えれば、記憶)される。尚、ここでの「減速行動」とは、運転者が減速時に行う各種操作或いは挙動を包括する概念であり、例えばブレーキペダルやハンドルの操作タイミングや操作量等である。また「場所情報」は、車両の走行位置を示すものであり、減速行動と結びつけることができる程度に具体化された情報である。場所情報は、例えば車両の走行している座標の他、走行中の道路の条件(例えば、カーブや交差点であること等)を含む。
【0008】
上述した学習によれば、車両の運転者が、どのような場所を走行する際に、どのような減速行動をとるのかを知ることができる。具体的には、カーブのどの位置で、どの程度ハンドルやブレーキを操作するか、或いは交差点のどの位置で車速が最小になるように減速するか等を学習することができる。尚、減速行動の学習は、典型的には、カーブの入口や交差点の手前等、運転者が減速行動をとるであろうと予測される地点から開始される。
【0009】
続いて、本発明の位置補正装置では、学習された減速行動のうち、場所情報が同じであればバラツキが所定の範囲内となる行動が特徴点として抽出される。尚、ここでの「場所情報が同じ」とは、典型的には、車両が同じ場所を走行している状態を指すが、例えばカーブの度合いや車幅等、道路条件が同じ場合も含まれる。また「同じ」とは、場所情報が完全に一致する場合を含む他、道路条件が同じと見なせる程度に(即ち、後述する本発明の効果が得られる程度に)近い状態であることを意味している。即ち、場所情報が完全に一致しない場合であっても、場所情報が近い場合であれば相応の効果が得られる。「所定の範囲」は、ある減速行動の一つを、運転者の特徴点として抽出できる程度にバラツキが少ないと判定するための閾値であり、理論的或いは実験的、経験的に求められ、予め設定されている。
【0010】
特徴点の抽出において、学習された減速行動のタイミングや操作量、或いは場所情報は、誤差を含む場合がある。しかしながら、このような誤差は、学習回数を増やすことで小さくすることができる。よって、上述した学習は、有効な特徴点を抽出できるようになるまで複数回行われることが望ましい。また、抽出される特徴点は、複数であっても構わない。
【0011】
特徴点の抽出後は、車両が場所情報の同じである地点(即ち、既に学習済みの地点)を走行する場合に、現在の運転者の特徴点が検出される。特徴点が検出されると、検出された特徴点及び学習された減速行動から抽出された特徴点が互いに比較される。即ち、現在運転者によって行われている特徴点である減速行動と、学習された減速行動とが比較される。より具体的には、操作タイミングや操作量等の特徴点のパラメータが互いに比較される。
【0012】
ここで、特徴点は場所情報が同じであればバラツキが所定の範囲内である行動なので、検出した特徴点と学習された特徴点を比較することで、現在の車両の位置を極めて正確に導き出すことができる。即ち、検出された特徴点のパラメータの値から、学習された特徴点が同様のパラメータとなる地点を、現在車両が走行していると判定できる。従って、例えば高精度GPS(Global Positioning System)のような、極めて高い精度で位置情報を取得する手段を備えていなくとも、車両の位置情報が正確な位置に補正される。
【0013】
以上説明したように、本発明の位置補正装置によれば、場所が同じであれば安定したパラメータである特徴点を抽出することで、走行中の車両の位置を正確に検出することが可能である。
【0014】
本発明の車両の制御装置の一態様では、前記抽出手段は、少なくとも前記運転者による操舵角を前記特徴点として抽出する
この態様によれば、本願発明者の研究によって比較的安定傾向にあると判明している操舵角(即ち、ハンドルの操作量)が特徴点として抽出されるため、より正確な位置補正を行うことが可能となる。尚、操舵角以外の特徴点がある場合には、操舵角と組み合わせて用いられることで、更に正確な位置情報の補正が可能である。
【0015】
本発明の車両の制御装置の他の態様では、前記運転者の認識を行う運転者認識手段を更に備え、前記学習手段は、前記運転者毎に減速行動を学習する。
【0016】
この態様によれば、同じ車両を複数の運転者が使用する場合に、例えば顔認証やキー登録によって、車両を運転している運転者を認識できるように構成される。そして、減速行動の学習は運転者毎に行われる。従って、その後の特徴点の抽出や位置補正も運転者毎に行われることとなり、一の運転者が運転中に学習されたデータが、他の運転者の運転中の位置補正に用いられることはない。
【0017】
本願発明者の研究によれば、特徴点である減速行動の操作タイミングや操作量は、運転者毎に異なることが判明している。よって、上述したように、運転者毎に減速行動を学習するようにすれば、より好適に車両の位置補正を行うことができる。
【0018】
本発明の位置補正方法は上記課題を解決するために、運転者の減速行動を車両が走行している場所情報と関連づけて学習する学習工程と、前記学習された減速行動のうち、前記場所情報が同じであればバラツキが所定の範囲内となる行動を特徴点として抽出する抽出工程と、前記車両が、前記場所情報が同じである地点を走行する場合に、前記運転者の前記特徴点を検出する検出工程と、前記検出された特徴点及び前記学習された減速行動から抽出された特徴点を互いに比較することで、前記車両の位置補正を行う補正工程とを備える。
【0019】
本発明の位置補正方法によれば、学習された減速行動から、場所が同じであれば安定したパラメータである特徴点が抽出されるため、本発明の位置補正装置と同様に走行中の車両の位置を正確に検出することが可能である。
【0020】
尚、本発明の位置補正方法においても、上述した本発明の位置補正装置における各種態様と同様の各種態様を採ることが可能である。
【0021】
本発明の運転支援装置は上記課題を解決するために、上述した本発明の位置補正装置(但し、その各種態様も含む)と、前記位置補正装置によって補正された位置に基づいて、前記車両の運転支援制御を行う支援制御部とを備える。
【0022】
本発明の運転支援装置によれば、本発明の位置補正装置によって車両の位置情報が極めて正確なものに補正されているため、例えば自動減速制御等の運転支援を好適に実行することができる。
【0023】
本発明の作用及び他の利得は次に説明する発明を実施するための形態から明らかにされる。
【図面の簡単な説明】
【0024】
【図1】実施形態に係る位置補正装置の全体構成を示すブロック図である。
【図2】実施形態に係る位置補正装置による学習動作の流れを示すフローチャートである。
【図3】交差点を左折する際の車両の動きを概略的に示す上面図である。
【図4】車両が交差点を左折する際の各種パラメータの変化を示すグラフである。
【図5】ハンドル操作のタイミングを運転手別に示すグラフである。
【図6】ブレーキ操作のタイミングを運転者別に示すグラフである。
【図7】実施形態に係る位置補正装置による位置補正動作の流れを示すフローチャートである。
【発明を実施するための形態】
【0025】
以下では、本発明の実施形態について図を参照しつつ説明する。尚、以下では、本発明の位置補正装置が、車両の運転支援制御を行う運転支援制御装置に適用される場合について説明する。
【0026】
先ず、本実施形態に係る位置補正装置の構成について、図1を参照して説明する。ここに図1は、本実施形態に係る位置補正装置の全体構成を示すブロック図である。
【0027】
図1において、本実施形態に係る位置補正装置100は、運転者認識部110と、学習部120と、場所情報検出部130と、減速行動検出部140、特徴点抽出部150と、位置補正部160とを備えて構成されている。
【0028】
運転者認識部110は、本発明の「運転者認識手段」の一例であり、例えば顔認証やキー登録等によって運転者を認識する。運転者認識部110を備えることで、同一の車両を複数人が使用する場合に、現在の運転者を認識することが可能となる。
【0029】
学習部120は、本発明の「学習手段」の一例であり、後述する場所情報検出部130において検出される場所情報、及び減速行動検出部140において検出される運転者の減速行動を互いに関連づけて学習する。学習部120は、例えば車両に搭載されるカーナビゲーションシステムが有するHDD(Hard Disc Drive)や、通信で接続するセンタ側のサーバ等に学習内容を記憶する。
【0030】
場所情報検出部130は、例えばGPSや車載カメラ等を含んで構成されており、車両が走行する位置、或いは道路条件等を含む場所情報を検出する。
【0031】
減速行動検出部140は、運転者による減速行動の際に操作される各種部位に取り付けられたセンサ等で構成されており、例えばブレーキ操作やハンドル操作のタイミングや操作量を検出する。
【0032】
特徴点抽出部150は、本発明の「抽出手段」の一例であり、例えば演算回路やメモリ等を含んで構成されている。特徴点抽出部150hは、学習部120において学習された減速行動から、場所によって変化しない特徴点を検出する。
【0033】
位置補正部160は、本発明の「補正手段」の一例であり、例えば演算回路やメモリ等を含んで構成されている。位置補正部160は、場所情報検出部130において検出される場所情報、及び減速行動検出部140において検出される運転者の減速行動と、特徴点抽出部150において抽出された特徴点とを比較することで、車両の位置を補正する。この位置補正動作については、後に詳述する。
【0034】
本実施形態に係る位置補正装置100によって補正された位置情報は、運転支援装置における運転支援制御部200に出力される。運転支援制御部200は、位置補正装置100において補正された位置情報を用いて、車両の運転支援に係る制御を行うことが可能に構成されている。
【0035】
次に、本実施形態に係る位置補正装置の動作及び効果について、図1に加えて、図2から図7を参照して説明する。尚、ここでは、本実施形態に係る位置補正装置の動作のうち、本実施形態の効果を特徴的に示す部分を詳細に説明し、その他の動作については適宜説明を省略するものとする。
【0036】
先ず、本実施形態に係る位置補正装置の学習動作について、図2から図6を参照して説明する。ここに図2は、本実施形態に係る位置補正装置による学習動作の流れを示すフローチャートである。また図3は、交差点を左折する際の車両の動きを概略的に示す上面図であり、図4は、車両が交差点を左折する際の各種パラメータの変化を示すグラフである。図5は、ハンドル操作のタイミングを運転手別に示すグラフであり、図6は、ブレーキ操作のタイミングを運転者別に示すグラフである。
【0037】
図2において、本実施形態に係る位置補正装置100の学習動作時には、先ず運転者認識部110において、車両の運転者が認識される(ステップS01)。即ち、現在車両を運転しているのが誰であるかが認識される。運転者が認識されると、その情報は学習部120に出力され、以降は認識された運転者別での学習動作が行われることになる。このような運転者の認識動作は、例えばエンジン始動時等に行われる。
【0038】
続いて、場所情報検出部130によって、走行中の車両が、減速対象地点に接近中であるか否かが判定される(ステップS02)。尚、「減速対象地点」とは、カーブや交差点のように、運転者による減速行動が行われるであろうと推測される地点であり、どのような場所を減速対象地点とするかは、予め設定されている。また、減速対象地点にどの程度近づいた場合を「接近している」とするかは、予め適切な閾値を設定しておけばよい。以下では、図3に示すように、車両500が交差点を左折しようとする場合について説明する。
【0039】
図4において、車両500が交差点を左折する際には、車両500が交差点に達する前から運転者によるブレーキ操作が開始され、車速が一時的に低下する。具体的には、車両500の走行距離が150mを過ぎた地点で、運転者によるブレーキ操作が行われ、車速が大きく低下している。
【0040】
運転者は、上述したブレーキ操作を行うと共に、ハンドル操作も並行して行う。具体的には、車両500が十分に減速され走行距離が200mを過ぎた地点で、ハンドルが大きく左にきられている。その後、ブレーキ操作及びハンドル操作が終了されると共に、アクセル操作等がなされ、交差点を左折し終わった車両500は加速される。
【0041】
図2に戻り、本実施形態に係る位置補正装置100では、車両500が減速対象地点に接近していると判定されると(ステップS02:YES)、学習部120において、車両500の走行する場所情報と、運転者による減速行動とが互いに関連づけて学習される(ステップS03)。具体的には、場所情報検出部130において検出された場所情報(車両の走行距離や座標等)と、減速行動検出部140において検出された減速行動(例えば、ブレーキ操作やハンドル操作のタイミング等)とが、互いに関連づけて学習される。
【0042】
ここで、本願発明者の研究によれば、上述した運転者の減速行動には、同じ場所を走行する場合に大きく変化するものと、ほとんど変化しないものとがある。
【0043】
図5及び図6において、ハンドル操作のタイミングは、運転者A、B及びCによって夫々異なるものの、運転者が同じであれば比較的安定した値となる。例えば図5に示すデータでは、右折の場合、左折の場合のいずれも、誤差は1m以内である。一方で、ブレーキ操作のタイミングは、運転者A、B及びCによって夫々異なると共に、運転者が同じであっても大きなバラツキを有している。
【0044】
本実施形態に係る位置補正装置100は、上述したハンドル操作のように、場所が同じであれば大きく変化しないようなパラメータを、特徴点として抽出する。
【0045】
再び図2に戻り、特徴点を抽出する際には、先ず特徴点抽出部150において、特徴点を抽出できる程度に場所情報及び減速行動が学習されているか否かが判定される(ステップS04)。即ち、特徴点を判別できる程度に十分なデータ量が学習されているか否かが判定される。具体的には、例えばN+1のデータを加味しても平均及び分散が閾値以上変化しない場合等に特徴点が抽出可能であると判定する。
【0046】
特徴点が抽出可能であると判定された場合(ステップS04:YES)、特徴点抽出部150は、特徴点を抽出し(ステップS05)、学習動作は終了する。尚、抽出される特徴点は一つであってもよいし、二以上であっても構わない。
【0047】
一方で、特徴点が抽出可能でないと判定された場合(ステップS04:NO)、再びステップS03の場所情報及び減速行動の学習が行われ、データが蓄積される。即ち、場所情報及び減速行動の学習は、特徴点を検出できるようになるまで繰り返し行われる。
【0048】
次に、本実施形態に係る位置補正装置の位置補正動作について、図7を参照して説明する。ここに図7は、本実施形態に係る位置補正装置による位置補正動作の流れを示すフローチャートである。尚、以下では、上述した学習動作が終了した状態で車両の運転が開始される場合を例にとり説明する。
【0049】
図7において、本実施形態に係る位置補正装置100の位置補正動作時には、先ず運転者認識部110において、車両500の運転者が認識される(ステップS11)。即ち、学習動作時のステップS01と同様に、現在車両500を運転しているのが誰であるかが認識される。運転者が認識されると、その情報は位置補正部160に出力され、以降は認識された運転者別での位置補正動作が行われることになる。
【0050】
続いて、場所情報検出部130によって、走行中の車両500が、減速対象地点に接近中であるか否かが判定される(ステップS12)。尚、ここでの減速対象地点は、学習済み(即ち、運転者の特徴点を抽出済み)の減速対象地点である。
【0051】
車両500が減速対象地点に接近していると判定されると(ステップS12:YES)、減速行動検出部140において、特徴点として抽出された減速行動が検出される(ステップS13)。即ち、ここでの減速行動検出部140は、本発明の「検出手段」の一例である。
【0052】
特徴点が検出されると、検出された特徴点及び学習された減速行動から抽出された特徴点が互いに比較される。即ち、現在運転者によって行われている特徴点である減速行動と、学習された減速行動とが比較される。
【0053】
ここで、特徴点は場所情報が同じであれば安定した値となる減速行動なので、検出した特徴点と学習された特徴点を比較することで、現在の車両500の位置を極めて正確に導き出すことができる。即ち、検出された特徴点のパラメータの値から、学習された特徴点が同様のパラメータとなる地点を、現在車両500が走行していると判定できる。これを利用して、位置補正部160は、車両500の位置を補正する(ステップS14)。
【0054】
上述した位置補正動作によれば、車両500の位置情報をcmオーダーで検出することも可能である。尚、正確な位置情報は高精度なGPS等でも検出することが可能であるが、この場合コストが非常に高くなってしまう。これに対し、本実施形態に係る位置補正装置100は、比較的低コストで実現することが可能である。
【0055】
本発明の位置補正装置100によって補正された車両500の位置情報は、運転支援制御部200へ出力される。そして運転支援制御部200では、補正された車両500の位置情報を用いて各種運転支援制御が行われる(ステップS15)。補正された車両500の位置情報は、特徴点を用いることによって極めて正確な値となっているため、運転支援制御は好適に実行される。
【0056】
以上説明したように、本実施形態に係る位置補正装置によれば、場所が同じであれば安定したパラメータである特徴点を抽出することで、走行中の車両の位置を正確に検出することが可能である。
【0057】
本発明は、上述した実施形態に限られるものではなく、特許請求の範囲及び明細書全体から読み取れる発明の要旨或いは思想に反しない範囲で適宜変更可能であり、そのような変更を伴う車両の制御装置もまた本発明の技術的範囲に含まれるものである。
【符号の説明】
【0058】
100…位置補正装置、110…運転者認識部、120…学習部、130…場所情報検出部、140…減速行動検出部、150…特徴点検出部、160…位置補正部、200…運転支援制御部、500…車両
【特許請求の範囲】
【請求項1】
運転者の減速行動を車両が走行している場所情報と関連づけて学習する学習手段と、
前記学習された減速行動のうち、前記場所情報が同じであればバラツキが所定の範囲内となる行動を特徴点として抽出する抽出手段と、
前記車両が、前記場所情報が同じである地点を走行する場合に、前記運転者の前記特徴点を検出する検出手段と、
前記検出された特徴点及び前記学習された減速行動から抽出された特徴点を互いに比較することで、前記車両の位置補正を行う補正手段と
を備えることを特徴とする位置補正装置。
【請求項2】
前記抽出手段は、少なくとも前記運転者による操舵角を前記特徴点として抽出することを特徴とする請求項1に記載の位置補正装置。
【請求項3】
前記運転者の認識を行う運転者認識手段を更に備え、
前記学習手段は、前記運転者毎に減速行動を学習する
ことを特徴とする請求項1又は2に記載の位置補正装置。
【請求項4】
運転者の減速行動を車両が走行している場所情報と関連づけて学習する学習工程と、
前記学習された減速行動のうち、前記場所情報が同じであればバラツキが所定の範囲内となる行動を特徴点として抽出する抽出工程と、
前記車両が、前記場所情報が同じである地点を走行する場合に、前記運転者の前記特徴点を検出する検出工程と、
前記検出された特徴点及び前記学習された減速行動から抽出された特徴点を互いに比較することで、前記車両の位置補正を行う補正工程と
を備えることを特徴とする位置補正方法。
【請求項5】
請求項1から3に記載の位置補正装置と、
前記位置補正装置によって補正された位置に基づいて、前記車両の運転支援制御を行う支援制御部と
を備えることを特徴とする運転支援装置。
【請求項1】
運転者の減速行動を車両が走行している場所情報と関連づけて学習する学習手段と、
前記学習された減速行動のうち、前記場所情報が同じであればバラツキが所定の範囲内となる行動を特徴点として抽出する抽出手段と、
前記車両が、前記場所情報が同じである地点を走行する場合に、前記運転者の前記特徴点を検出する検出手段と、
前記検出された特徴点及び前記学習された減速行動から抽出された特徴点を互いに比較することで、前記車両の位置補正を行う補正手段と
を備えることを特徴とする位置補正装置。
【請求項2】
前記抽出手段は、少なくとも前記運転者による操舵角を前記特徴点として抽出することを特徴とする請求項1に記載の位置補正装置。
【請求項3】
前記運転者の認識を行う運転者認識手段を更に備え、
前記学習手段は、前記運転者毎に減速行動を学習する
ことを特徴とする請求項1又は2に記載の位置補正装置。
【請求項4】
運転者の減速行動を車両が走行している場所情報と関連づけて学習する学習工程と、
前記学習された減速行動のうち、前記場所情報が同じであればバラツキが所定の範囲内となる行動を特徴点として抽出する抽出工程と、
前記車両が、前記場所情報が同じである地点を走行する場合に、前記運転者の前記特徴点を検出する検出工程と、
前記検出された特徴点及び前記学習された減速行動から抽出された特徴点を互いに比較することで、前記車両の位置補正を行う補正工程と
を備えることを特徴とする位置補正方法。
【請求項5】
請求項1から3に記載の位置補正装置と、
前記位置補正装置によって補正された位置に基づいて、前記車両の運転支援制御を行う支援制御部と
を備えることを特徴とする運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2011−123734(P2011−123734A)
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願番号】特願2009−281738(P2009−281738)
【出願日】平成21年12月11日(2009.12.11)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願日】平成21年12月11日(2009.12.11)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]