
位置計測装置及び位置計測システム
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置データを素早く計測できる位置計測装置を提供する
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
【解決手段】演算装置200は、カメラ速度と最大荷重領域の速度とを対応付けた対応テーブルを記憶する記憶部230と、足裏圧力が最大となる最大荷重領域の時間変化により最大荷重ベクトルを生成する最大荷重ベクトル生成部251と、対応テーブルを参照して、最大荷重ベクトルが示す最大荷重領域の速度から、カメラ速度を算出するカメラ速度算出部252と、最大荷重ベクトルが示す最大荷重領域の方向を、カメラ方向として算出するカメラ方向算出部253と、カメラ速度と、カメラ方向とに基づいて、カメラ位置を算出するカメラ位置算出部254と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動する人物に保持された計測対象の位置データを算出する位置計測装置及び位置計測システムに関する。
【背景技術】
【0002】
番組制作や映画制作において、撮影カメラを動かしながら撮影した映像に、CGや別の映像を合成することが広く行われている。この合成に際して、撮影カメラがどのように動いたか、つまり、撮影カメラの位置や姿勢を示すカメラデータが必要になる。
【0003】
従来から、カメラデータを計測する手法として、バーチャルスタジオで活用しているVR用ペデスタル(例えば、非特許文献1)や、三脚に載せて使用する構造のDGS(データ・ギャザリング・システム)が知られている。例えば、非特許文献1に記載の技術は、ロボットカメラを取り付ける雲台に特殊な細工を施すことで、ロボットカメラの動きや姿勢をカメラデータとして計測するものである。より具体的には、パン、チルト、ロール等の回転軸の回転角を検出するためのエンコーダが雲台に取り付けられており、ロボットカメラが動いたことによって変化する回転角の変化から、カメラデータを計測する。
【0004】
また、撮影スタジオに限定される特殊な、ハンディカメラの動きを検出するシステムも知られている。この磁気動き検出システムは、ハンディカメラ本体に3軸方向の磁界を発生する磁気トランスミッタを取り付け、天井に磁気を検出するセンサを複数個配備したものである。
【0005】
また、ロボットカメラの動きを実際に計測するのではなく、収録映像の画像解析を行うことで、カメラデータを算出するソフトウェアも知られている。この画像解析ソフトウェアは、例えば、収録映像の中から特徴点を抽出して、動きベクトルの変化からカメラデータを逆算するものである。
【0006】
この他、物体の姿勢を検出するセンサとしては、最近、MEMS(Micro Electro Mechanical Systems)を用いた6軸の慣性センサが脚光を浴びている。この慣性センサは、3個のジャイロセンサと3個の加速度センサとをコンパクトに集積したものである。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】津田他、「スタジオ番組用移動ロボットカメラの開発」、映像情報メディア学会誌、Vol.62、No.1、pp.84〜91(2008)
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、非特許文献1に記載の技術では、専用の大型装置(雲台)が必要になると共に、車輪部の構造や原点座標の設定の制約から、平坦でない場所での使用が極めて困難である。
また、従来のDGSは、屋外で使用可能であるが、非特許文献1に記載の技術と同様、専用の大型装置を使用しなければならず、重く、機動性が悪いという欠点がある。
【0009】
さらに、従来の磁気動き検出システムは、磁気センサの配置制限から、撮影スタジオ以外での使用が困難である。
さらに、従来の画像解析ソフトウェアは、カメラデータの精度が不十分であり、景色のような特徴が少ない映像からカメラデータを算出することが極めて困難である。
【0010】
さらに、従来の慣性センサは、カメラデータのうち、撮影カメラの姿勢に関しては、高い精度を確保することができる。その一方、従来の慣性センサは、撮影カメラの位置データに関しては、加速度の二重積分で導出するしかなく、その精度がまったく期待できない。
【0011】
そこで、本発明は、機動性に優れ、平坦でない場所でも、高い精度で位置データを計測できる位置計測装置及び位置計測システムを提供することを課題とする。
【課題を解決するための手段】
【0012】
前記した課題に鑑みて、本願第1発明に係る位置計測装置は、移動する人物の足裏圧力を計測する履物状又はシート状の足裏圧力計測手段と、足裏圧力が最大となる最大荷重領域に基づいて、移動する人物に保持された計測対象の位置データを算出する位置データ算出手段と、を備える位置計測装置であって、位置データ算出手段が、記憶部と、最大荷重ベクトル生成部と、移動速度算出部と、移動方向算出部と、計測対象位置算出部と、を備えることを特徴とする。
【0013】
かかる構成によれば、足裏圧力計測手段は、履物状の場合、人物が移動可能であれば計測場所を問わず、シート状の場合、平坦でない場所にも配置可能である。従って、位置計測装置は、専用の大型装置を必要とせずに、平坦でない場所でも、移動する人物の足裏圧力を計測することができる。
【0014】
ここで、足裏全体のうち、足裏圧力が最大となる最大荷重領域の速度は、人物の移動速度と高い相関関係を有すると考えられる。そして、計測対象は、この人物と共に移動するから、この人物と同じ速度で移動する。つまり、計測対象の移動速度と、最大荷重領域の速度との間には、高い相関関係がある。このため、位置データ算出手段は、記憶部によって、移動する人物に保持された計測対象の移動速度と、人物の両足の足裏圧力から求められた最大荷重領域の速度とが予め対応付けられた対応テーブルを記憶する。
【0015】
また、位置データ算出手段は、最大荷重ベクトル生成部によって、足裏圧力計測手段で計測された足裏圧力が最大となる最大荷重領域を求め、最大荷重領域の時間変化により最大荷重領域の方向及び速度を示す最大荷重ベクトルを生成する。そして、位置データ算出手段は、移動速度算出部によって、記憶部に記憶された対応テーブルを参照して、最大荷重ベクトルの大きさで表される最大荷重領域の速度から、計測対象の移動速度を算出する。
つまり、位置データ算出手段は、計測対象の移動速度に高い相関を有する最大荷重領域の速度を用いて、計測対象の移動速度を正確に算出する。
【0016】
また、位置データ算出手段は、移動方向算出部によって、最大荷重ベクトルの方向を計測対象の移動方向として算出する。そして、位置データ算出手段は、計測対象位置算出部によって、移動速度算出部で算出された計測対象の移動速度と、計測対象の移動方向とに基づいて、計測対象の位置データを算出する。例えば、計測対象位置算出部は、計測対象の移動速度を積分して計測対象の移動距離を求めることで、計測対象の移動方向及び移動距離で示される位置データを算出する。この位置データは、予め設定された基準座標に対する計測対象の絶対位置で表現してもよく、計測間隔ごとの計測対象の相対位置で表現してもよい。
【0017】
また、本願第2発明に係る位置計測装置は、位置データ算出手段において、記憶部が、さらに、人物の両足の荷重バランスと、人物に保持された計測対象の位置ずれ量とが予め対応付けられた誤差テーブルを記憶し、足裏圧力計測手段で計測された両足の足裏圧力の比によって、荷重バランスを算出する荷重バランス算出部と、記憶部に記憶された誤差テーブルを参照して、荷重バランス算出部が算出した荷重バランスから計測対象の位置ずれ量を算出し、算出した位置ずれ量によって計測対象位置算出部で算出された位置データを補正する位置データ補正部と、をさらに備えることを特徴とする。
【0018】
ここで、計測対象の位置は、前後両足の荷重バランスが均衡しているときを基準にすると、荷重バランスが崩れたときに規則性をもって変化する。従って、位置計測装置は、この荷重バランスを求めて、計測対象の位置ずれを補正することができる。
【0019】
また、本願第3発明に係る位置計測装置は、足裏圧力計測手段が、人物の履物の靴中又は靴底に装着され、人物の足裏圧力を計測する感圧センサと、感圧センサで計測された足裏圧力を位置データ算出手段に送信する送信部と、を備えることを特徴とする。
【0020】
かかる構成によれば、位置計測装置は、人物の履物と同程度の大きさに足裏圧力計測手段を小型化することができる。さらに、位置計測装置は、この足裏圧力計測手段が人物と共に移動するため、位置データの計測範囲を極めて広くすることができる。
なお、本発明の履物には、例えば、靴、ブーツ、サンダル又はスリップがあげられる。
【0021】
また、本願第4発明に係る位置計測装置は、足裏圧力計測手段が、人物の足裏圧力を計測する感圧シートと、感圧シートで計測された足裏圧力を位置データ算出手段に送信する送信部と、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、一般的な感圧シートで足裏圧力計測手段を構成することができる。
【0022】
また、本願第5発明に係る位置計測装置は、記憶部が、人物ごとに、対応テーブルと誤差テーブルとを記憶し、移動速度算出部が、人物ごとの対応テーブルを参照して、計測対象の移動速度を算出し、位置データ補正部が、人物ごとの誤差テーブルを参照して、位置データの位置ずれ量を補正することを特徴とする。
【0023】
ここで、計測対象の移動速度と最大荷重領域の速度との相関関係を示す対応テーブル、及び、荷重バランスと計測対象の位置との相関関係を示す誤差テーブルは、個人差が大きく表れる。このため、位置計測装置は、各個人に対応した対応テーブル及び誤差テーブルを用いて、相関関係の個人差を位置データに反映させることができる。
【0024】
また、本願第6発明に係る位置計測装置は、位置データ算出手段が、計測対象の3次元方向の加速度を計測する加速度センサと、計測対象のパン方向、チルト方向及びヨー方向の角速度を計測するジャイロセンサと、ジャイロセンサが計測した角速度と加速度センサが計測した加速度とから、計測対象の向きを示す姿勢データを算出する姿勢データ算出部と、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、計測対象の位置データに加えて、姿勢データも計測することができる。
【0025】
また、本願第7発明に係る位置計測装置は、位置データ算出手段が、計測対象としての撮影カメラに装着され、計測対象位置算出部が、撮影カメラが撮影した撮影映像の同期信号が入力され、入力された同期信号に同期させて計測対象の位置データを算出することを特徴とする。
かかる構成によれば、位置計測装置は、撮影カメラが撮影映像を撮影したタイミングに同期させて、撮影カメラの位置データ及び姿勢データをカメラデータとして計測することができる。
【0026】
また、本願第8発明に係る位置計測装置は、位置データ算出手段において、記憶部が、さらに、撮影カメラが備えるズームレンズのリング回転量と撮影カメラの画角とを予め対応付けた撮影画角テーブルを記憶し、リング回転量を計測するエンコーダと、記憶部が記憶する撮影画角テーブルを参照して、エンコーダが計測したリング回転量から撮影カメラの画角を算出する画角算出部と、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、カメラデータに撮影カメラの画角を付加することができる。
【0027】
また、本願第9発明に係る位置計測システムは、本願第1発明から本願第8発明までの何れかに係る位置計測装置と、計測対象としての撮影カメラと、を備えることを特徴とする。
【発明の効果】
【0028】
本発明によれば、以下のような優れた効果を奏する。
本願1,9発明によれば、計測対象の移動速度に高い相関関係を有する最大荷重領域の速度を用いて、計測対象の移動速度を正確に算出できるため、位置データを高い精度で計測することができる。さらに、本願1,9発明によれば、足裏圧力計測手段が履物状又はシート状であるため、平坦でない場所でも位置データを計測でき、専用の大型装置を必要とせず、機動性に優れる。
【0029】
本願2,9発明によれば、人物の荷重バランスが崩れたときでも、この人物に保持された計測対象の位置ずれを補正できるため、位置データをより高い精度で計測することができる。
本願3,9発明によれば、足裏圧力計測手段を小型化できるため、機動性により優れる。さらに、本願3,9発明によれば、足裏圧力計測手段が人物と共に移動するため、位置データの計測範囲を極めて広くすることができる。
【0030】
本願4,9発明によれば、足裏圧力計測手段で一般的な感圧シートを用いるため、位置計測装置を簡素な構成とし、低コスト化を図ることができる。
本願5,9発明によれば、各個人に対応した対応テーブル及び誤差テーブルを用いて、相関関係の個人差を位置データに反映させるため、位置データをより高い精度で計測することができる。
【0031】
本願第6,9発明によれば、計測対象の位置データに加えて、姿勢データも計測することができる。
本願第7,9発明によれば、撮影カメラが撮影映像を撮影したタイミングに同期させて、カメラデータを計測するため、撮影映像とカメラデータとの時間軸が一致して、映像加工処理を効率的に行うことができる。
本願第8,9発明によれば、カメラデータに撮影カメラの画角が付加されるので、映像加工処理をより効率的に行うことができる。
【図面の簡単な説明】
【0032】
【図1】本発明の第1実施形態に係るカメラデータ計測システムの概略図である。
【図2】図1の圧力データ計測装置の構造を示す図である。
【図3】図2の圧力データ計測装置において、各手段の信号入出力を図示したブロック図である。
【図4】図1の演算装置の構成を示す図である。
【図5】図4の演算装置において、各手段の信号入出力を図示したブロック図である。
【図6】本発明の第1実施形態において、カメラマンが移動する様子を示した説明図である。
【図7】本発明の第1実施形態において、カメラマンが前進するときの最大荷重ベクトルを説明する図である。
【図8】本発明の第1実施形態において、カメラマンが左前方に移動するときの最大荷重ベクトルを説明する図である。
【図9】図5の演算装置が記憶する対応テーブルを説明する図である。
【図10】本発明の第1実施形態において、カメラマンの荷重バランスを説明する説明図である。
【図11】図5の演算装置が記憶する誤差テーブルを説明する図であり、(a)は前後両足の荷重バランスの関係を示し、(b)は荷重バランスと位置ずれ量との関係を示す。
【図12】図2の圧力データ計測装置の動作を示すフローチャートである。
【図13】図5の演算装置の動作を示すフローチャートである。
【図14】本発明の第2実施形態に係るカメラデータ計測装置の概略図である。
【図15】図14の感圧シートの構成を説明する図であり、(a)は感圧シートの断面図であり、(b)は感圧シートの上面図である。
【図16】図14の圧力データ計測装置において、各手段の信号入出力を図示したブロック図である。
【図17】本発明の第3実施形態に係るカメラデータ計測装置の概略図である。
【図18】本発明の第4実施形態において、エンコーダを説明する説明図である。
【図19】図18の演算装置において、各手段の信号入出力を図示したブロック図である。
【発明を実施するための形態】
【0033】
以下、本発明の実施形態について、適宜図面を参照しながら詳細に説明する。なお、各実施形態において、同一の機能を有する手段には同一の符号を付し、説明を省略した。
【0034】
(第1実施形態)
[カメラデータ計測システムの概略]
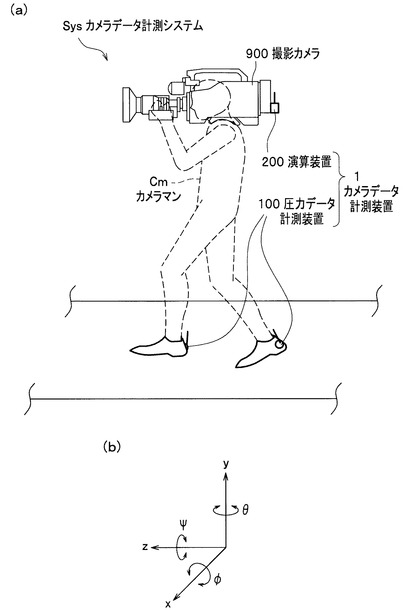
図1を参照して、本発明の第1実施形態に係るカメラデータ計測システム(位置計測システム)Sysの概略について説明する。
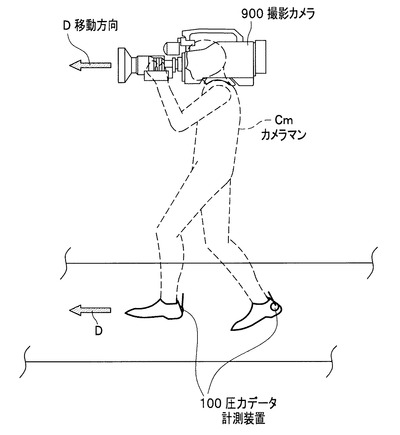
図1(a)に示すように、カメラデータ計測システムSysは、カメラデータ計測装置(位置計測装置)1と、計測対象としての撮影カメラ900とを備える。
このカメラデータ計測装置1は、撮影カメラ900の姿勢データと位置データとをカメラデータとして計測するものであり、圧力データ計測装置(足裏圧力計測手段)100と、演算装置(位置データ算出手段)200とを備える。
【0035】
圧力データ計測装置100は、履物状に形成されており、カメラマンCmの左右両足の足裏圧力を計測するものである。そして、圧力データ計測装置100は、計測した足裏圧力を圧力データとして、演算装置200に送信する。
【0036】
演算装置200は、圧力データ計測装置100から圧力データ(足裏圧力)を受信し、この足裏圧力が最大となる最大荷重領域に基づいて、移動するカメラマンCmに保持された撮影カメラ900の位置データを算出するものである。この演算装置200は、撮影カメラ900の後部に装着、固定される。また、演算装置200は、撮影カメラ900の姿勢データを計測し、この姿勢データと位置データとをカメラデータとして出力する。
【0037】
撮影カメラ900は、テレビ番組等の撮影映像を撮影するカメラであり、カメラマンCmが肩に載せて撮影を行う一般的な肩載式のカメラである。つまり、カメラマンCmは、撮影カメラ900を肩に載せた状態で、床や地面を前後左右に移動しながら撮影を行う。また、カメラマンCmが撮影ポジションを変えるため、撮影カメラ900を上下に移動させることもある。
【0038】
ここで、請求項に記載の「保持」には、撮影カメラ900をカメラマンCmの肩に載せた以外の状態だけでなく、計測対象を手に載せる、手で握る又は手で持ち上げるといった状態が含まれる。
【0039】
以下の説明では、図1(b)に示すように、x軸を左右方向とし、y軸を上下方向とし、z軸を前後方向とする。また、y軸が回転軸となる回転方向θをパン方向とし、x軸が回転軸となる回転方向φをチルト方向とし、z軸が回転軸となる回転方向Ψをヨー方向とする。
【0040】
[履物状感圧センサ]
<履物状感圧センサの構造>
図2を参照して、圧力データ計測装置100の構造を説明した後、図3を参照して、圧力データ計測装置100の信号処理を説明する。
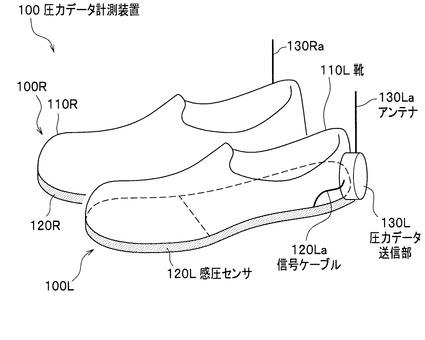
図2に示すように、圧力データ計測装置100は、右足用の圧力データ計測装置100Rと、左足用の圧力データ計測装置100Lとで構成される。
なお、圧力データ計測装置100L,100Rが同一構成のため、圧力データ計測装置100Lのみ説明し、圧力データ計測装置100Rの説明を省略する。
【0041】
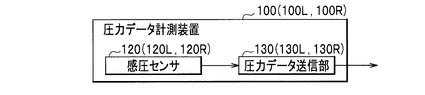
圧力データ計測装置100Lは、靴110Lと、感圧センサ120Lと、圧力データ送信部(送信部)130Lとを備える。
具体的には、圧力データ計測装置100Lは、靴110Lの靴底に感圧センサ120Lが装着(貼付)されている。この感圧センサ120Lは、靴110Lの靴底と同じ形状であり、靴110Lの靴底全面で足裏圧力を計測する。また、信号ケーブル120Laは、計測した足裏圧力を出力するため、感圧センサ120Lと圧力データ送信部130Lとの間を接続している。この圧力データ送信部130Lは、靴110Lのかかと側に固定された円筒状の筐体と、この筐体上部から突出したアンテナ130Laとで構成される。
【0042】
<履物状感圧センサの信号処理>
感圧センサ120Lは、カメラマンCmの足裏圧力を計測するものである。つまり、感圧センサ120Lは、撮影カメラ900を肩に載せたカメラマンCmが移動する際、このカメラマンCmの足裏のどの部分にどの程度の圧力が加わっているか計測する。そして、感圧センサ120Lは、計測した足裏圧力を圧力データ送信部130Lに出力する。
なお、感圧センサ120Lで足裏圧力を計測する原理は、後記する感圧シート140と同様のため、説明を省略する。
【0043】
圧力データ送信部130Lは、感圧センサ120Lから足裏圧力が入力され、この足裏圧力を圧力データとして演算装置200に送信するものである。ここで、圧力データ送信部130Lは、カメラマンCmの移動を妨げないために、無線通信を行うことが好ましい。また、圧力データ送信部130Lは、圧力データ計測装置100が圧力データ計測装置100L,100Rのペアのため、左足の圧力データであることの識別情報を、圧力データに付加することが好ましい。
なお、圧力データ送信部130Lは、一般的なネットワークインタフェースで実現できるため、詳細な説明を省略する。
【0044】
[演算装置の構成]
図4,図5を参照して、図1の演算装置200の構成について説明する。
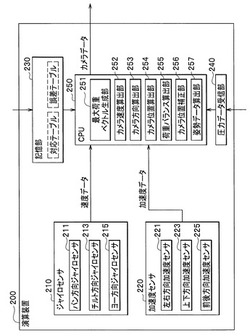
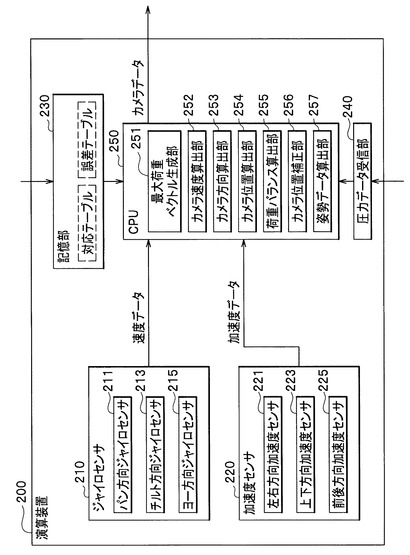
図4に示すように、演算装置200は、ジャイロセンサ210と、加速度センサ220と、記憶部230(図5)と、圧力データ受信部240(受信部、図5)と、CPU(Central Processing Unit)250とを備える。
【0045】
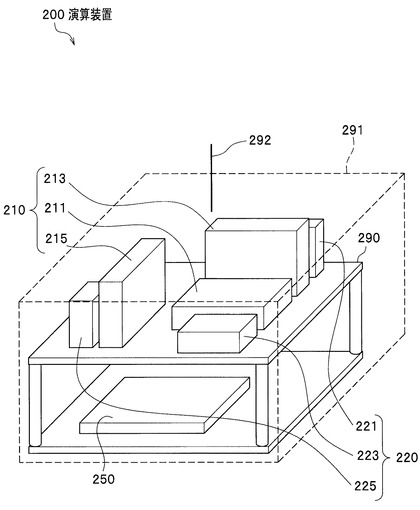
演算装置200は、基板290の上段にジャイロセンサ210と加速度センサ220とが配置され、基板290の下段にCPU250が配置される。また、演算装置200は、ジャイロセンサ210及び加速度センサ220とCPU250との間で信号を入出力できるように、図示を省略した回路が形成される。そして、演算装置200は、前記した各手段が配置された基板290を、箱型の筐体291に収納する。さらに、演算装置200は、筐体291上部から突出したアンテナ292を備える。
【0046】
図5に示すように、ジャイロセンサ210は、パン方向ジャイロセンサ211と、チルト方向ジャイロセンサ213と、ヨー方向ジャイロセンサ215とで構成される。
パン方向ジャイロセンサ211は、演算装置200及びこの演算装置200が装着された撮影カメラ900について、パン方向の角速度を計測するものである。
チルト方向ジャイロセンサ213は、演算装置200及び撮影カメラ900について、チルト方向の角速度を計測するものである。
ヨー方向ジャイロセンサ215は、演算装置200及び撮影カメラ900について、ヨー方向の角速度を計測するものである。
そして、ジャイロセンサ210は、計測したパン方向、チルト方向及びヨー方向の角速度を速度データとしてCPU250に出力する。
【0047】
加速度センサ220は、左右方向加速度センサ221と、上下方向加速度センサ223と、前後方向加速度センサ225とで構成される。
左右方向加速度センサ221は、演算装置200及びこの演算装置200が装着された撮影カメラ900について、左右方向(x軸方向)の加速度を計測するものである。
上下方向加速度センサ223は、演算装置200及び撮影カメラ900について、上下方向(y軸方向)の加速度を計測するものである。
前後方向加速度センサ225は、演算装置200及び撮影カメラ900について、前後方向(z軸方向)の加速度を計測するものである。
そして、加速度センサ220は、計測した左右方向、上下方向及び前後方向の加速度を加速度データとしてCPU250に出力する。
【0048】
なお、ジャイロセンサ210及び加速度センサ220は、一般的なMEMS(Micro Electro Mechanical Systems)慣性センサを利用できるため、詳細な説明を省略する。このMEMS慣性センサは、コンパクトに集積可能であり、演算装置200の小型化に寄与する。
【0049】
記憶部230は、対応テーブルと、誤差テーブルとを記憶するメモリ、ハードディスク等の記憶装置である。
この対応テーブルは、移動するカメラマンCmに保持された撮影カメラ900の移動速度(以下、「カメラ速度」)と、カメラマンCmの左右両足の足裏圧力から求められた最大荷重領域の速度とを予め対応付けたものである。
この誤差テーブルは、カメラマンCmの前後に開いた両足(以下、「前後両足」)の荷重バランスと、カメラマンCmに保持された撮影カメラ900の位置ずれ量とを予め対応付けたものである。
【0050】
<最大荷重領域>
図6〜図11を参照して、対応テーブルの前提として最大荷重領域を説明した後、対応テーブル及び誤差テーブルの設定方法を順番に説明する(適宜図5参照)。
【0051】
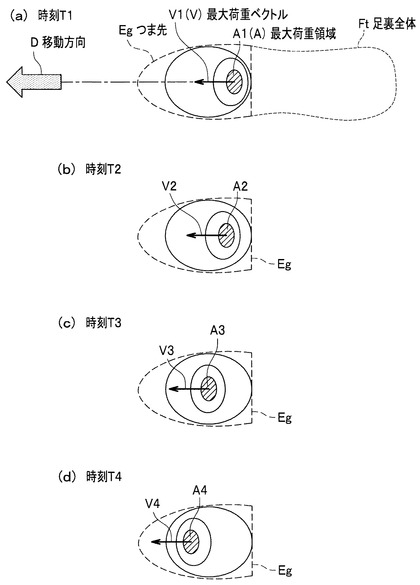
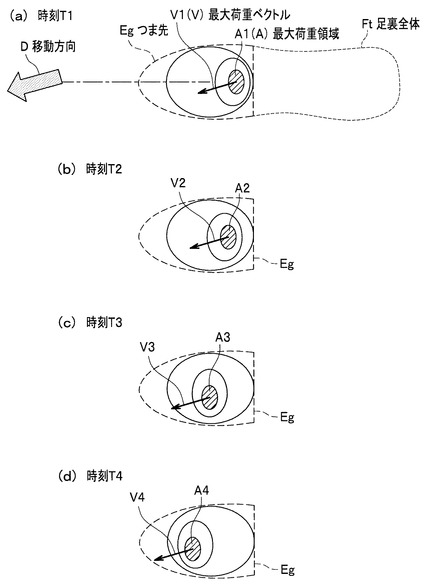
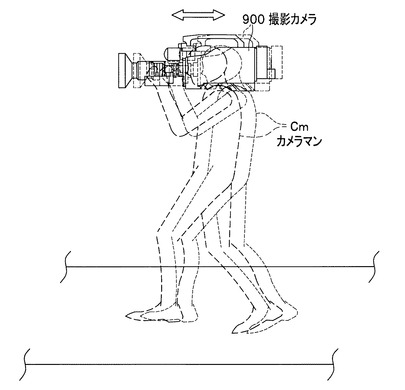
図6に示すように、カメラマンCmが撮影カメラ900を肩に載せて、前進する状態を考える。また、撮影カメラ900は、カメラマンCmと同じ方向に移動することになり、撮影カメラ900及びカメラマンCmの移動方向を符号Dで図示した。この場合、図7に示すように、カメラマンCmの移動に伴って、カメラマンCmのつま先Egにおいて、最大荷重領域Aの位置が時間変化する。
【0052】
図7では、カメラマンCmの足裏全体Ftを点線で図示し、足裏全体Ftのうち、つま先Egを破線で図示した。
また、図7では、カメラマンCmの移動によるつま先Egの荷重分布を実線で図示した。この荷重分布は、例えば、円形又は楕円形のように表れる。そして、最大荷重領域Aは、この荷重分布が最大となる領域であり、図7にハッチングで図示した。
なお、図面を見やすくするため、図7(b)〜(d)では、移動方向D及び足裏全体Ftの図示を省略した。
【0053】
より具体的には、図7(a)に示すように、カメラマンCmが片足を踏み出した直後では(時刻T1)、最大荷重領域Aは、つま先Egの後方に位置する。次に、カメラマンCmが片足を踏み込んでいくと(時刻T2)、最大荷重領域Aの位置は、図7(b)に示すように、移動方向Dと同じ方向で、時刻T1よりもつま先Egの前方に動く。
【0054】
また、カメラマンCmが片足をより踏み込んでいくと(時刻T3)、最大荷重領域Aは、図7(c)に示すように、時刻T2よりもつま先Egの前方に動き、つま先Egの略中央に位置することになる。さらに、カメラマンCmが反対側の足に踏みかえる直前(時刻T4)、最大荷重領域Aは、図7(d)に示すように、時刻T3よりもつま先Egの前方に移動し、つま先Egの先端側に近づくことになる。
【0055】
図8を参照して、カメラマンCmが左前方に移動する場合についても、説明する。
まず、カメラマンCmが片足を踏み出した直後では(時刻T1)、最大荷重領域Aは、図8(a)に示すように、つま先Egの後方に位置する。次に、カメラマンCmが片足を踏み込んでいくと(時刻T2,T3)、最大荷重領域Aの位置は、図8(b),(c)に示すように、つま先Egの左前方に動く。さらに、カメラマンCmが反対側の足に踏みかえる直前(時刻T4)、最大荷重領域Aは、図8(d)に示すように、時刻T3よりもつま先Egの左前方に動き、つま先Egの先端左側に近づく。
【0056】
従って、図7,図8に示すように、最大荷重領域Aの方向は、移動方向Dと同じ方向になる。また、最大荷重領域Aの位置は、時刻T1〜T4の間で時間変化するため、この時間変化から最大荷重領域Aの速度を求めることができる。
【0057】
ここで、最大荷重領域Aの速度が速くなるほどカメラマンCmの移動速度も速く、最大荷重領域Aの速度が遅くなるほどカメラマンCmの移動速度も遅くなる。このように、カメラマンCmの移動速度と、最大荷重領域Aの速度との間には、高い相関関係がある。さらに、撮影カメラ900は、カメラマンCmと共に移動するから、カメラマンCmと同じ移動速度及び移動方向になる。従って、カメラ速度と、最大荷重領域Aの速度との間には、高い相関関係があると言える。
【0058】
なお、時刻T1〜T4のそれぞれで、最大荷重領域A1〜A4(A)の方向及び速度をベクトル表記したものが、最大荷重ベクトルV1〜V4(V)である。つまり、最大荷重ベクトルVは、その方向が最大荷重領域Aの方向を示し、その大きさが最大荷重領域Aの速度を示す。
また、カメラマンCmが足を踏みかえるときに、左右両足で同時に最大荷重領域Aが現れる場合も考えられるが、極めて短時間のため、これを無視して扱ってもよい。
【0059】
<対応テーブルの設定方法:キャリブレーション>
続いて、キャリブレーションによって対応テーブルを設定する方法について、具体的に説明する。
なお、キャリブレーションとは、カメラ速度と最大荷重領域Aの速度とを対応付けることである。
【0060】
図6に示すように、カメラマンCmは、圧力データ計測装置100を履いて足裏圧力を計測可能な状態とし、撮影カメラ900を肩に載せる。このとき、撮影カメラ900の位置変化を計測するために、例えば、撮影カメラ900の後方に、レーザ測距計や3次元位置計測センサ等の位置変化計測装置(不図示)を配置する。
【0061】
また、本実施形態では、圧力データ計測装置100が履物状であるため、カメラマンCmの絶対位置(絶対座標)を計測することができない。このため、キャリブレーションは、予め設定されたキャリブレーション原点にカメラマンCmが位置した状態で開始することとする。
【0062】
まず、カメラマンCmは、低速なカメラワークを想定して、前後左右、様々な方向に移動する。このとき、圧力データ計測装置100でカメラマンCmの足裏圧力を計測しながら、位置変化計測装置で撮影カメラ900の位置変化を計測する。そして、足裏圧力から最大荷重領域Aの速度を求め、撮影カメラ900の位置変化から、カメラ速度を求める。
【0063】
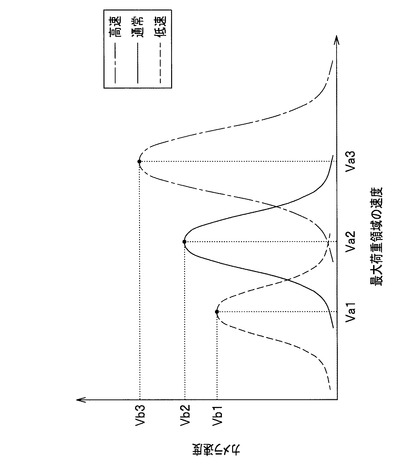
ここで、最大荷重領域Aの速度とカメラ速度との相関関係は、例えば、図9に示すようなガウス分布となる。この図9では、低速なカメラワークでのガウス分布を破線、通常のカメラワークでのガウス分布を実線、高速なカメラワークでのガウス分布を一点鎖線で図示した。
【0064】
キャリブレーションの手法は、特に制限されないが、本実施形態では、ガウス分布のピークを用いる。低速なカメラワークの場合、最大荷重領域Aの速度がピークとなるVa1と、このときのカメラ速度Vb1とが対応付けられる(図9の破線)。また、通常のカメラワークの場合、最大荷重領域の速度Va2と、カメラ速度Vb2とが対応付けられる(図9の実線)。さらに、高速なカメラワークの場合、最大荷重領域の速度Va3と、カメラ速度Vb3とが対応付けられる(図9の一点鎖線)。このように、低速、通常、高速等の様々な速度でカメラワークを想定して、キャリブレーションを繰り返し行う。
【0065】
ここで、キャリブレーション後に相関関係を示すデータが不足する場合、内挿等の補間処理で対応テーブルの不足データを補うことが好ましい。
また、最大荷重領域Aは、例えば、カメラマンCmの個人差や圧力データ計測装置100の計測精度に起因して、図7のように一定の形状を保たずに、様々な形状に変化する場合もある。この場合、最大荷重領域Aの重心位置を求め、最大荷重領域Aの重心位置の速度と、カメラ速度とを対応付けてもよい。
【0066】
<誤差テーブルの設定方法>
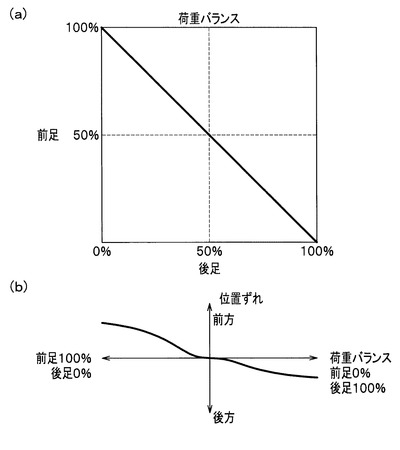
図10に示すように、カメラマンCmの前後両足の荷重バランスが不均衡な場合、肩に載せられた撮影カメラ900の位置は、前後に誤差(位置ずれ)を有することが多い。そして、撮影カメラ900の位置は、荷重バランスが前後で不均衡になると、前後に規則性をもって変化する。従って、カメラマンCmが荷重バランスを前後に変化させながら、基準位置に対する撮影カメラ900の位置ずれ量を位置変化計測装置で計測する。
なお、前後の荷重バランスが均衡な状態での撮影カメラ900の位置を、基準位置とする。
【0067】
図11(a)に示すように、荷重バランスは、カメラマンCmの前足に全荷重が加わった状態では、前足の足裏圧力が100%で後足の足裏圧力が0%となる。また、荷重バランスは、カメラマンCmの前後両足の荷重が均衡な状態では、前後両足の足裏圧力が共に50%となる。さらに、荷重バランスは、カメラマンCmの後足に全荷重が加わった状態では、後足の足裏圧力が100%で前足の足裏圧力が0%となる。つまり、図11(a)に示すように、後足両足の足裏圧力を合計すると、100%になる。
この図11(a)では、縦軸が前足の足裏圧力であり、横軸が後足の足裏圧力である。
【0068】
このとき、図11(b)に示すように、撮影カメラ900は、カメラマンCmの前足に全荷重が加わった状態だと、前方への位置ずれ量が大きくなる。また、撮影カメラ900は、カメラマンCmの前後両足の荷重が均衡な状態だと、基準位置にあるために、位置ずれが全くない。そして、撮影カメラ900は、カメラマンCmの後足に全荷重が加わった状態だと、後方への位置ずれ量が大きくなる。つまり、誤差テーブルは、図11(b)に示すように、荷重バランスと、位置ずれ量とを対応付けたものである。
この図11(b)では、縦軸が位置ずれ量であり、横軸が図11(a)の荷重バランスに対応する。
【0069】
図5に戻り、演算装置200の構成について、説明を続ける。
圧力データ受信部240は、圧力データ計測装置100L,100Rのそれぞれから、左右両足の足裏圧力を圧力データとして受信するものである。そして、圧力データ受信部240は、受信した左右両足の圧力データをCPU250に出力する。この圧力データ受信部240は、一般的なネットワークインタフェースで実現できるため、詳細な説明を省略する。
【0070】
CPU250は、演算装置200での各種演算を行うものであり、最大荷重ベクトル生成部251と、カメラ速度算出部(移動速度算出部)252と、カメラ方向算出部(移動方向算出部)253と、カメラ位置算出部(計測対象位置算出部)254と、荷重バランス算出部255と、カメラ位置補正部(位置データ補正部)256と、姿勢データ算出部257とを備える。ここで、CPU250は、ジャイロセンサ210から速度データが入力され、加速度センサ220から加速度データが入力され、圧力データ受信部240から左右両足の圧力データが入力される。
【0071】
最大荷重ベクトル生成部251は、左右両足の圧力データ(足裏圧力)が最大となる最大荷重領域Aを求め、この最大荷重領域Aの時間変化により最大荷重領域Aの方向及び速度を示す最大荷重ベクトルVを生成するものである。
カメラ速度算出部252は、記憶部230に記憶された対応テーブルを参照して、最大荷重ベクトルVの大きさで表される最大荷重領域Aの速度から、カメラ速度を算出するものである。
【0072】
カメラ方向算出部253は、最大荷重ベクトルVの方向(最大荷重領域Aの方向)を、撮影カメラ900の移動方向(以下、「カメラ方向」)として算出するものである。
カメラ位置算出部254は、カメラ速度算出部252で算出されたカメラ速度と、カメラ方向算出部253で算出されたカメラ方向とに基づいて、撮影カメラ900の位置を示す位置データを算出するものである。
【0073】
<位置データの算出>
図7を参照して、最大荷重ベクトル生成部251が最大荷重ベクトルV1を生成してから、カメラ位置算出部254が位置データを算出するまでの処理を具体的に説明する(適宜図5参照)。
【0074】
図7(a)に示すように、最大荷重ベクトル生成部251は、カメラマンCmが片足を踏み込む前の時刻T0から時刻T1までの最大荷重領域A1の時間変化により、時刻T1での最大荷重ベクトルV1を求める。また、カメラ速度算出部252は、対応テーブルを参照して、最大荷重ベクトルV1の大きさで表される最大荷重領域A1の速度から、時刻T1でのカメラ速度を算出する。言い換えるなら、カメラ速度算出部252は、対応テーブルから、最大荷重領域A1の速度に対応するカメラ速度を読み出す。そして、カメラ方向算出部253は、最大荷重ベクトルV1の方向(最大荷重領域A1の方向)を、時刻T1でのカメラ方向として算出する。
【0075】
図7(b)に示すように、最大荷重ベクトル生成部251は、時刻T1から時刻T2までの最大荷重領域A2の時間変化により、時刻T2での最大荷重ベクトルV2を求める。また、カメラ速度算出部252は、対応テーブルを参照して、最大荷重ベクトルV2の大きさから、時刻T2でのカメラ速度を算出する。そして、カメラ方向算出部253は、最大荷重ベクトルV2の方向を、時刻T2でのカメラ方向として算出する。
なお、時刻T3,T4でカメラ速度及びカメラ方向を算出する処理は、時刻T1,T2と同様のため、説明を省略する。
【0076】
その後、カメラ位置算出部254は、時刻T1から時刻T4までのカメラ速度を積分して、時刻T1から時刻T4までの撮影カメラ900の移動距離を求める。さらに、カメラ位置算出部254は、時刻T1から時刻T4までのカメラ方向が全て同一方向になるため、カメラ方向に撮影カメラ900移動距離だけ離れた位置を、時刻T4での位置データとして算出する。
【0077】
ここで、前記したように、最大荷重領域Aは、図7のように一定の形状を保たずに、様々な形状に変化する場合もある。この場合、最大荷重ベクトル生成部251は、最大荷重領域Aの重心位置を求め、最大荷重領域Aの重心位置の時間変化により、最大荷重ベクトルVを求めてもよい。
【0078】
なお、時刻T1から時刻T4までの計算間隔で位置データを算出する例で説明したが、カメラ位置算出部254は、この計算間隔を任意に設定できる。
また、本実施形態では、圧力データ計測装置100が履物状であるため、カメラマンCmの絶対位置(絶対座標)を計測することができない。このため、カメラデータ計測装置1は、キャリブレーション原点にカメラマンCmが位置した状態で、位置データの算出を開始することとする。そして、カメラデータ計測装置1は、計算間隔ごとに、撮影カメラ900の相対的な位置を示す位置データを算出する。
【0079】
図5に戻り、演算装置200の構成について、説明を続ける。
前記したように、圧力データは、左右何れの足であるかの識別情報が付加されている。また、カメラマンCmは、両足をそろえた状態で左右どちらの足を最初に踏み出すのか癖として決まっており、その後、左右の足を交互に踏みこむ。従って、荷重バランス算出部255は、カメラマンCmが最初に踏み出す足の情報を予め設定すると共に、左右の足裏圧力の最大値が反転したときに左右の足が踏み替えられたと判定する。これによって、荷重バランス算出部255は、受信した圧力データが前足又は後足の何れに対応するかを識別して、左右両足の足裏圧力の比によって、前後両足の荷重バランスを算出することができる。
【0080】
カメラ位置補正部256は、記憶部230に記憶された誤差テーブルを参照して(図11)、荷重バランス算出部255が算出した荷重バランスから、カメラ位置算出部254で算出された位置データの位置ずれ量を算出して補正するものである。言い換えるなら、カメラ位置補正部256は、誤差テーブルから、荷重バランスに対応する位置ずれ量を読み出す。そして、カメラ位置補正部256は、この位置ずれ量だけ撮影カメラ900の位置を前方又は後方に移動させるように、位置データを補正する。
【0081】
姿勢データ算出部257は、ジャイロセンサ210からの速度データと加速度センサ220からの加速度データとから、撮影カメラ900の向きを示す姿勢データを算出するものである。ここで、加速度データにより撮影カメラ900がどちらの方向に移動しようとしたか分かる。従って、姿勢データ算出部257は、例えば、加速度センサ220からの加速度データに、ジャイロセンサ210からの速度データに相乗しているクロストーク分を補正して積分処理を行う。このようにして、姿勢データ算出部257は、パン方向、チルト方向及びヨー方向について、撮影カメラ900の姿勢データ(Pθ,Pφ,PΨ)を算出する。
【0082】
その後、CPU250は、カメラ位置補正部256が補正した位置データと、姿勢データ算出部257が算出した姿勢データとを、カメラデータとして出力する。
なお、速度データ及び加速度データから姿勢データを算出する方法は、MEMS慣性センサの実装に依存する一般的な処理のため、詳細な説明を省略する。
【0083】
[履物状感圧センサの動作]
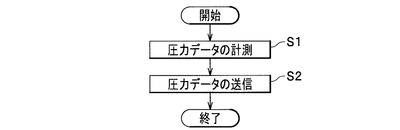
図12を参照して、図3の圧力データ計測装置100の動作について説明する(適宜図3参照)。
圧力データ計測装置100は、感圧センサ120によって、カメラマンCmの足裏圧力(圧力データ)を計測する(ステップS1)。
圧力データ計測装置100は、圧力データ送信部130によって、感圧センサ120で計測された圧力データを演算装置200に送信する(ステップS2)。
【0084】
[演算装置の動作]
図13を参照して、図5の演算装置200の動作について説明する(適宜図3参照)。
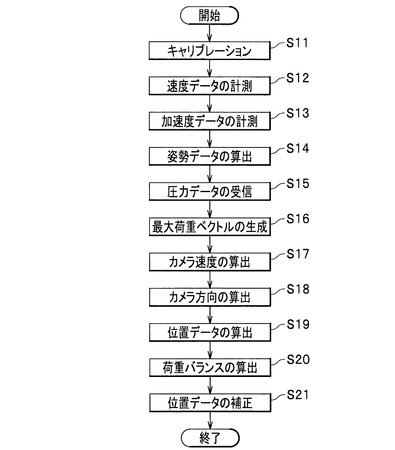
演算装置200は、キャリブレーションによって設定した対応テーブルと、誤差テーブルとを、予め記憶部230に記憶する(ステップS11)。
【0085】
演算装置200は、ジャイロセンサ210によって、速度データを計測する(ステップS12)。
演算装置200は、加速度センサ220によって、加速度データを計測する(ステップS13)。
演算装置200は、姿勢データ算出部257によって、速度データ及び加速度データから姿勢データを算出する(ステップS14)。
【0086】
演算装置200は、圧力データ受信部240によって、左右両足の圧力データを受信する(ステップS15)。
演算装置200は、最大荷重ベクトル生成部251によって、圧力データが最大となる最大荷重領域を求め、この最大荷重領域Aの時間変化により最大荷重領域の方向及び速度を示す最大荷重ベクトルを生成する(ステップS16)。
【0087】
演算装置200は、カメラ速度算出部252によって、対応テーブルを参照して、最大荷重ベクトルVの大きさで表される最大荷重領域Aの速度から、カメラ速度を算出する(ステップS17)。
演算装置200は、カメラ方向算出部253によって、最大荷重ベクトルの方向をカメラ方向として算出する(ステップS18)。
演算装置200は、カメラ位置算出部254によって、カメラ速度と、カメラ方向とに基づいて位置データを算出する(ステップS19)。
【0088】
演算装置200は、荷重バランス算出部255によって、左右両足の圧力データの比から荷重バランスを算出する(ステップS20)。
演算装置200は、カメラ位置補正部256によって、誤差テーブルを参照して、荷重バランスから撮影カメラ900の位置ずれ量を算出し、この位置ずれ量で位置データを補正する(ステップS21)。
その後、演算装置200は、CPU250によって、撮影カメラ900の位置データと姿勢データとを、カメラデータとして出力する。
【0089】
以上のように、本発明の第1実施形態に係るカメラデータ計測装置1は、カメラ速度に高い相関を有する最大荷重領域の速度を用いて、カメラ速度を正確に算出できるため、カメラデータを高い精度で計測することができる。さらに、カメラデータ計測装置1は、足裏圧力計測装置100が履物状のために、この足裏圧力計測装置100を小型化でき、機動性により優れる。
【0090】
また、カメラデータ計測装置1は、足裏圧力計測装置100がカメラマンCmと共に移動するため、平坦でない場所を含め、カメラデータの計測範囲を極めて広くすることができる。さらに、カメラデータ計測装置1は、カメラマンCmの荷重バランスが崩れたときでも、このカメラマンCmの肩に載せた撮影カメラ900の位置ずれを補正するので、カメラデータをより高い精度で計測することができる。
【0091】
そして、このカメラデータを用いれば、撮影映像にCGや他の映像を合成する、撮影映像の一部に追随して映像効果を加える等の映像加工処理が可能になり、映像表現の幅を拡大することができる。これによって、カメラデータ計測装置1のユーザは、映画のような大スペクタクルな映像をテレビ番組として容易に制作できるようになり、迫力があって分かり易い映像を視聴者に提供することができる。
【0092】
さらに、個人情報保護の観点からニュース番組等において、映像の一部にぼかしを加えて人物等の判別を困難にする映像加工処理を施す機会も増加している。このような場合、カメラデータ計測装置1のユーザは、その映像加工処理を効率的に行うことができる。
【0093】
なお、第1実施形態では、撮影カメラ900の姿勢データを計測するため、圧力データ計測装置100と、演算装置200とを独立させたが、本発明は、これに限定されない。例えば、この姿勢データを計測しない場合、圧力データ計測装置100が演算装置200を内蔵してもよい。
【0094】
なお、第1実施形態では、撮影カメラ900が計測対象であることとして説明したが、本発明は、これに限定されない。つまり、本発明は、人物が保持できれば何れの物体を計測対象としてもよい。
【0095】
(変形例1)
図5に戻り、本発明の第1実施形態に係るカメラデータ計測装置1について、変形例を説明する。
カメラ速度と最大荷重領域の速度との相関関係や、前後両足の荷重バランスと撮影カメラ900の位置ずれ量との相関関係は、カメラマンCmごとの個人差が大きく表れる。
このため、記憶部230は、各カメラマンCmに対応した対応テーブル及び誤差テーブルを予め記憶する。そして、カメラデータ計測装置1は、カメラマンCmの認証処理を行い、認証されたカメラマンCmに対応した対応テーブル及び誤差テーブルを用いて、カメラデータを計測する。
【0096】
以上のように、本発明の変形例1に係るカメラデータ計測装置1は、前記した相関関係の個人差をカメラデータに反映させるので、カメラデータをより高い精度で計測することができる。
【0097】
(第2実施形態)
[位置センサの構成]
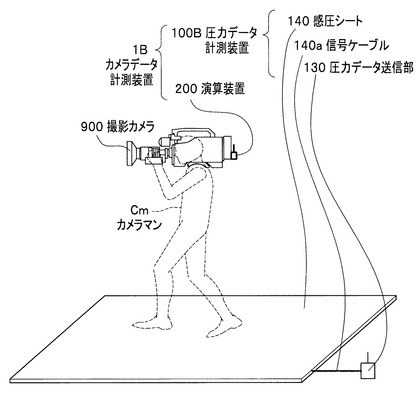
図14〜図16を参照して、本発明の第2実施形態に係るカメラデータ計測装置1Bについて、第1実施形態と異なる点を説明する。
カメラデータ計測装置1Bは、履物状の圧力データ計測装置100(図2)の代わりに、シート状の圧力データ計測装置100Bを備える点が第1実施形態と異なる。
【0098】
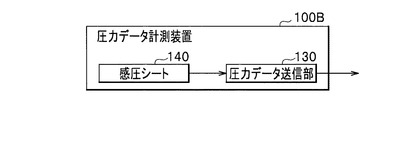
図14に示すように、カメラマンCmの足下には、感圧シート140が敷かれている。この感圧シート140は、カメラマンCmの移動範囲を少なくともカバーしており、例えば、長方形、正方形、円形、楕円形等の任意形状にできる。また、信号ケーブル140aは、計測した足裏圧力を出力するため、感圧シート140と圧力データ送信部130との間を接続している。
【0099】
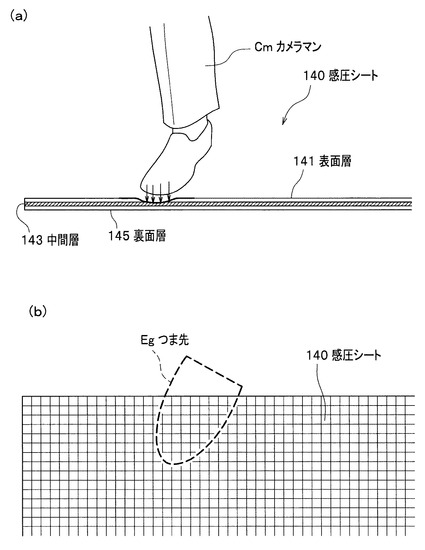
ここで、感圧シート140は、図15(a)に示すように、導電性材料からなる表面層141と抵抗材料からなる裏面層145とで、導電性ゴムからなる中間層143を挟むサンドイッチ構造になっている。また、感圧シート140は、図15(b)に示すように、表面層141から見て、縦横メッシュ状に抵抗値の変化を計測できる。つまり、感圧シート140は、カメラマンCmのつま先Egにより表面層141に圧力が加わると、その大きさと面積に応じて抵抗値が変化することになる。これを利用して、感圧シート140は、足裏圧力が加わった位置(絶対座標)と、足裏圧力の大きさとを計測する。その後、感圧シート140は、図16に示すように、計測した足裏圧力の位置及び大きさを、圧力データとして圧力データ送信部130に出力する。
【0100】
ここで、最大荷重領域Aは、感圧シート140で計測された足裏圧力が図15(b)の1メッシュで最大となる場合、その1メッシュ(1点)になる。また、最大荷重領域Aは、感圧シート140で計測された足裏圧力が図15(b)の複数メッシュで最大となる場合、それら全てのメッシュが結合した領域になる。
【0101】
以上のように、本発明の第2実施形態に係るカメラデータ計測装置1Bは、一般的な感圧シート140を用いるため、簡素な構成とし、低コスト化を図ることができる。さらに、カメラデータ計測装置1Bは、足裏圧力を絶対座標系で計測するため、カメラデータを絶対座標系で表すことができる。
【0102】
なお、第2実施形態では、感圧シート140が足裏圧力を絶対座標系で計測するため、キャリブレーション及び位置データの計測は、キャリブレーション原点にカメラマンCmが位置した状態で開始しなくともよい。
また、第2実施形態では、足裏圧力が絶対座標系で計測されるため、荷重バランス算出部255(図5)は、その絶対座標を用いて、左右両足の圧力データが前足又は後足に対応するか識別してもよい。
【0103】
(第3実施形態)
[カメラデータ計測装置の構成]
図17を参照して、本発明の第3実施形態に係るカメラデータ計測装置1Cの構成について、第2実施形態と異なる点を説明する。
【0104】
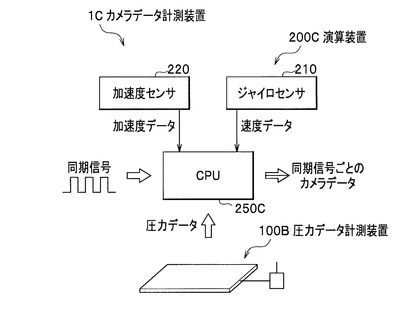
カメラデータは、主に、撮影映像の合成に利用されるものである。このため、撮影映像を構成する1枚1枚のフレーム画像ごとに、カメラデータが必要となる。その一方、圧力データ計測装置100B、ジャイロセンサ210及び加速度センサ220は、撮影映像の合成を意識したものでなく、圧力データ、速度データ及び加速度データの計測タイミングが、各フレーム画像に同期していないことが多い。そこで、カメラデータ計測装置1Cは、映像加工処理を確実に行うため、撮影映像の同期信号(垂直同期信号)ごとに、カメラデータを計測する。
【0105】
具体的には、カメラデータ計測装置1Cは、図17に示すように、撮影カメラ900から同期信号が入力される。そして、CPU250Cは、圧力データ計測装置100Bからの圧力データと、ジャイロセンサ210からの速度データと、加速度センサ220からの加速度データとを、同期信号が入力されたタイミングでサンプリングする。そして、CPU250Cは、サンプリングした圧力データと速度データと加速度データとを用いて、同期信号ごとにカメラデータを計測する。
なお、同期信号を用いる以外、カメラデータ計測装置1Cの各手段は、図5と同様のため、詳細な説明を省略する。
【0106】
以上のように、本発明の第3実施形態に係るカメラデータ計測装置1Cは、計測したカメラデータが各フレーム画像に同期するため、映像加工処理を効率的に行うことができる。
【0107】
なお、第3実施形態では、同期信号ごとにカメラデータを計測する例で説明したが、本発明は、これに限定されない。例えば、カメラデータ計測装置1Cは、圧力データ計測装置100B、ジャイロセンサ210及び加速度センサ220の計測周波数を、撮影映像の同期信号よりも十分に速い周波数とする。そして、カメラデータ計測装置1Cは、この計測周波数でカメラデータを計測し、各フレーム画像の撮影時間に一致するカメラデータ、又は、この撮影時間に最も近いカメラデータを出力してもよい。
【0108】
(第4実施形態)
[カメラデータ計測装置の構成]
図18,図19を参照して、本発明の第4実施形態に係るカメラデータ計測装置1Dの構成について、第1実施形態と異なる点を説明する。
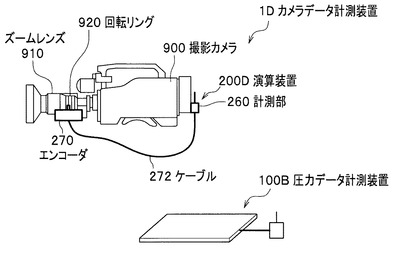
カメラデータ計測装置1Dは、撮影カメラ900の撮影画角を算出して、カメラデータに付加する点が、第2実施形態と大きく異なる。
【0109】
図18に示すように、撮影カメラ900は、回転リング920を回転させることで、撮影画角を変更可能なズームレンズ910を備える。この撮影カメラ900は、回転リング920にエンコーダ270が取り付けられている。
【0110】
エンコーダ270は、回転リング920のリング回転量を計測するものである。このエンコーダ270は、ケーブル272を介して計測部260に接続されており、計測したリング回転量を計測部260(図19のCPU250D)に出力する。
【0111】
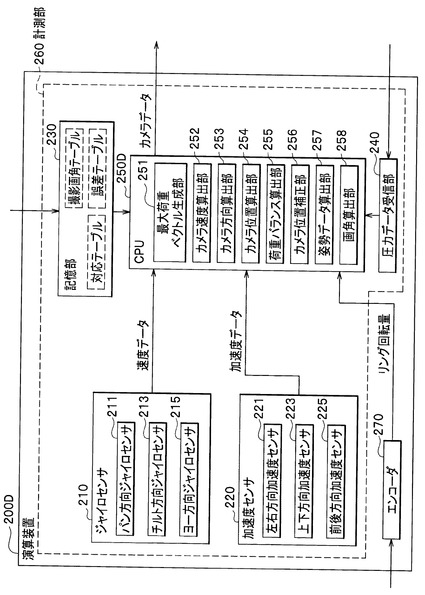
図19に示すように、演算装置200Dは、図5の演算装置200において、記憶部230の代わりに記憶部230Bを備え、画角算出部258とエンコーダ270とを追加したものである。
【0112】
記憶部230Bは、さらに、撮影画角テーブルを記憶する。
この撮影画角テーブルは、リング回転量と、撮影カメラ900の撮影画角とを予め対応付けたものである。
【0113】
CPU250Dは、最大荷重ベクトル生成部251と、カメラ速度算出部252と、カメラ方向算出部253と、カメラ位置算出部254と、荷重バランス算出部255と、カメラ位置補正部256と、姿勢データ算出部257、画角算出部258とを備える。ここで、CPU250Dは、速度データと、加速度データと、圧力データとに加え、エンコーダ270からリング回転量が入力される。
【0114】
画角算出部258は、記憶部230Bに記憶された撮影画角テーブルを参照して、CPU250Dに入力されたリング回転量から撮影カメラ900の撮影画角を算出するものである。言い換えるなら、画角算出部258は、入力されたリング回転量に対応付けられた撮影カメラ900の撮影画角を、撮影画角テーブルから読み出すことになる。
【0115】
その後、CPU250Dは、画角算出部258が算出した撮影画角を、カメラデータに付加して出力する。
以上のように、本発明の第4実施形態に係るカメラデータ計測装置1Dは、位置データ及び姿勢データに加えて、撮影画角もカメラデータとして計測することができる。
【0116】
なお、第4実施形態において、カメラデータの精度をさらに高くしたい場合、撮影カメラ900のフォーカスリングにもエンコーダを取り付けて、焦点位置による画角の変化を反映させてもよい。
【0117】
なお、第4実施形態では、画角算出部258が撮影画角を算出する例で説明したが、本発明は、これに限定されない。例えば、ズームレンズ内に画角を検出するためのエンコーダが内蔵された撮影カメラの場合、本発明は、デジタルデータとして、ズームレンズのコネクター経由で撮影カメラの画角を取得することもできる。
【0118】
なお、第3,4実施形態では、第2実施形態に係るカメラデータ計測装置1Bへの適用例を説明したが、本発明は、これに限定されない。つまり、第3,4実施形態の手法は、第1実施形態に係るカメラデータ計測装置1にも適用することもできる。
【産業上の利用可能性】
【0119】
本発明は、VFX映画等の映画制作や、高度な合成を必要とするドラマ番組、情報番組、迅速なポストプロダクション処理が要求される報道番組等の番組制作に利用することができる。
【符号の説明】
【0120】
1,1B,1C,1D カメラデータ計測装置(位置計測装置)
100,100B,100L,100R 圧力データ計測装置(足裏圧力計測手段)
110L,110R 靴
120,120L,120R 感圧センサ
130,130L,130R 圧力データ送信部(送信部)
140 感圧シート
140a 信号ケーブル
141 表面層
143 中間層
145 裏面層
200,200C,200D 演算装置(位置データ算出手段)
210 ジャイロセンサ
211 パン方向ジャイロセンサ
213 チルト方向ジャイロセンサ
215 ヨー方向ジャイロセンサ
220 加速度センサ
221 左右方向加速度センサ
223 上下方向加速度センサ
225 前後方向加速度センサ
230 記憶部
240 圧力データ受信部(受信部)
250,250C,250D CPU
251 最大荷重ベクトル生成部
252 カメラ速度算出部(移動速度算出部)
253 カメラ方向算出部(移動方向算出部)
254 カメラ位置算出部(計測対象位置算出部)
255 荷重バランス算出部
256 カメラ位置補正部(位置データ補正部)
257 姿勢データ算出部
258 画角算出部
260 計測部
270 エンコーダ
290 基板
291 筐体
292 アンテナ
900 撮影カメラ(計測対象)
910 ズームレンズ
920 回転リング
Sys カメラデータ計測システム(位置計測システム)
【技術分野】
【0001】
本発明は、移動する人物に保持された計測対象の位置データを算出する位置計測装置及び位置計測システムに関する。
【背景技術】
【0002】
番組制作や映画制作において、撮影カメラを動かしながら撮影した映像に、CGや別の映像を合成することが広く行われている。この合成に際して、撮影カメラがどのように動いたか、つまり、撮影カメラの位置や姿勢を示すカメラデータが必要になる。
【0003】
従来から、カメラデータを計測する手法として、バーチャルスタジオで活用しているVR用ペデスタル(例えば、非特許文献1)や、三脚に載せて使用する構造のDGS(データ・ギャザリング・システム)が知られている。例えば、非特許文献1に記載の技術は、ロボットカメラを取り付ける雲台に特殊な細工を施すことで、ロボットカメラの動きや姿勢をカメラデータとして計測するものである。より具体的には、パン、チルト、ロール等の回転軸の回転角を検出するためのエンコーダが雲台に取り付けられており、ロボットカメラが動いたことによって変化する回転角の変化から、カメラデータを計測する。
【0004】
また、撮影スタジオに限定される特殊な、ハンディカメラの動きを検出するシステムも知られている。この磁気動き検出システムは、ハンディカメラ本体に3軸方向の磁界を発生する磁気トランスミッタを取り付け、天井に磁気を検出するセンサを複数個配備したものである。
【0005】
また、ロボットカメラの動きを実際に計測するのではなく、収録映像の画像解析を行うことで、カメラデータを算出するソフトウェアも知られている。この画像解析ソフトウェアは、例えば、収録映像の中から特徴点を抽出して、動きベクトルの変化からカメラデータを逆算するものである。
【0006】
この他、物体の姿勢を検出するセンサとしては、最近、MEMS(Micro Electro Mechanical Systems)を用いた6軸の慣性センサが脚光を浴びている。この慣性センサは、3個のジャイロセンサと3個の加速度センサとをコンパクトに集積したものである。
【先行技術文献】
【非特許文献】
【0007】
【非特許文献1】津田他、「スタジオ番組用移動ロボットカメラの開発」、映像情報メディア学会誌、Vol.62、No.1、pp.84〜91(2008)
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、非特許文献1に記載の技術では、専用の大型装置(雲台)が必要になると共に、車輪部の構造や原点座標の設定の制約から、平坦でない場所での使用が極めて困難である。
また、従来のDGSは、屋外で使用可能であるが、非特許文献1に記載の技術と同様、専用の大型装置を使用しなければならず、重く、機動性が悪いという欠点がある。
【0009】
さらに、従来の磁気動き検出システムは、磁気センサの配置制限から、撮影スタジオ以外での使用が困難である。
さらに、従来の画像解析ソフトウェアは、カメラデータの精度が不十分であり、景色のような特徴が少ない映像からカメラデータを算出することが極めて困難である。
【0010】
さらに、従来の慣性センサは、カメラデータのうち、撮影カメラの姿勢に関しては、高い精度を確保することができる。その一方、従来の慣性センサは、撮影カメラの位置データに関しては、加速度の二重積分で導出するしかなく、その精度がまったく期待できない。
【0011】
そこで、本発明は、機動性に優れ、平坦でない場所でも、高い精度で位置データを計測できる位置計測装置及び位置計測システムを提供することを課題とする。
【課題を解決するための手段】
【0012】
前記した課題に鑑みて、本願第1発明に係る位置計測装置は、移動する人物の足裏圧力を計測する履物状又はシート状の足裏圧力計測手段と、足裏圧力が最大となる最大荷重領域に基づいて、移動する人物に保持された計測対象の位置データを算出する位置データ算出手段と、を備える位置計測装置であって、位置データ算出手段が、記憶部と、最大荷重ベクトル生成部と、移動速度算出部と、移動方向算出部と、計測対象位置算出部と、を備えることを特徴とする。
【0013】
かかる構成によれば、足裏圧力計測手段は、履物状の場合、人物が移動可能であれば計測場所を問わず、シート状の場合、平坦でない場所にも配置可能である。従って、位置計測装置は、専用の大型装置を必要とせずに、平坦でない場所でも、移動する人物の足裏圧力を計測することができる。
【0014】
ここで、足裏全体のうち、足裏圧力が最大となる最大荷重領域の速度は、人物の移動速度と高い相関関係を有すると考えられる。そして、計測対象は、この人物と共に移動するから、この人物と同じ速度で移動する。つまり、計測対象の移動速度と、最大荷重領域の速度との間には、高い相関関係がある。このため、位置データ算出手段は、記憶部によって、移動する人物に保持された計測対象の移動速度と、人物の両足の足裏圧力から求められた最大荷重領域の速度とが予め対応付けられた対応テーブルを記憶する。
【0015】
また、位置データ算出手段は、最大荷重ベクトル生成部によって、足裏圧力計測手段で計測された足裏圧力が最大となる最大荷重領域を求め、最大荷重領域の時間変化により最大荷重領域の方向及び速度を示す最大荷重ベクトルを生成する。そして、位置データ算出手段は、移動速度算出部によって、記憶部に記憶された対応テーブルを参照して、最大荷重ベクトルの大きさで表される最大荷重領域の速度から、計測対象の移動速度を算出する。
つまり、位置データ算出手段は、計測対象の移動速度に高い相関を有する最大荷重領域の速度を用いて、計測対象の移動速度を正確に算出する。
【0016】
また、位置データ算出手段は、移動方向算出部によって、最大荷重ベクトルの方向を計測対象の移動方向として算出する。そして、位置データ算出手段は、計測対象位置算出部によって、移動速度算出部で算出された計測対象の移動速度と、計測対象の移動方向とに基づいて、計測対象の位置データを算出する。例えば、計測対象位置算出部は、計測対象の移動速度を積分して計測対象の移動距離を求めることで、計測対象の移動方向及び移動距離で示される位置データを算出する。この位置データは、予め設定された基準座標に対する計測対象の絶対位置で表現してもよく、計測間隔ごとの計測対象の相対位置で表現してもよい。
【0017】
また、本願第2発明に係る位置計測装置は、位置データ算出手段において、記憶部が、さらに、人物の両足の荷重バランスと、人物に保持された計測対象の位置ずれ量とが予め対応付けられた誤差テーブルを記憶し、足裏圧力計測手段で計測された両足の足裏圧力の比によって、荷重バランスを算出する荷重バランス算出部と、記憶部に記憶された誤差テーブルを参照して、荷重バランス算出部が算出した荷重バランスから計測対象の位置ずれ量を算出し、算出した位置ずれ量によって計測対象位置算出部で算出された位置データを補正する位置データ補正部と、をさらに備えることを特徴とする。
【0018】
ここで、計測対象の位置は、前後両足の荷重バランスが均衡しているときを基準にすると、荷重バランスが崩れたときに規則性をもって変化する。従って、位置計測装置は、この荷重バランスを求めて、計測対象の位置ずれを補正することができる。
【0019】
また、本願第3発明に係る位置計測装置は、足裏圧力計測手段が、人物の履物の靴中又は靴底に装着され、人物の足裏圧力を計測する感圧センサと、感圧センサで計測された足裏圧力を位置データ算出手段に送信する送信部と、を備えることを特徴とする。
【0020】
かかる構成によれば、位置計測装置は、人物の履物と同程度の大きさに足裏圧力計測手段を小型化することができる。さらに、位置計測装置は、この足裏圧力計測手段が人物と共に移動するため、位置データの計測範囲を極めて広くすることができる。
なお、本発明の履物には、例えば、靴、ブーツ、サンダル又はスリップがあげられる。
【0021】
また、本願第4発明に係る位置計測装置は、足裏圧力計測手段が、人物の足裏圧力を計測する感圧シートと、感圧シートで計測された足裏圧力を位置データ算出手段に送信する送信部と、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、一般的な感圧シートで足裏圧力計測手段を構成することができる。
【0022】
また、本願第5発明に係る位置計測装置は、記憶部が、人物ごとに、対応テーブルと誤差テーブルとを記憶し、移動速度算出部が、人物ごとの対応テーブルを参照して、計測対象の移動速度を算出し、位置データ補正部が、人物ごとの誤差テーブルを参照して、位置データの位置ずれ量を補正することを特徴とする。
【0023】
ここで、計測対象の移動速度と最大荷重領域の速度との相関関係を示す対応テーブル、及び、荷重バランスと計測対象の位置との相関関係を示す誤差テーブルは、個人差が大きく表れる。このため、位置計測装置は、各個人に対応した対応テーブル及び誤差テーブルを用いて、相関関係の個人差を位置データに反映させることができる。
【0024】
また、本願第6発明に係る位置計測装置は、位置データ算出手段が、計測対象の3次元方向の加速度を計測する加速度センサと、計測対象のパン方向、チルト方向及びヨー方向の角速度を計測するジャイロセンサと、ジャイロセンサが計測した角速度と加速度センサが計測した加速度とから、計測対象の向きを示す姿勢データを算出する姿勢データ算出部と、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、計測対象の位置データに加えて、姿勢データも計測することができる。
【0025】
また、本願第7発明に係る位置計測装置は、位置データ算出手段が、計測対象としての撮影カメラに装着され、計測対象位置算出部が、撮影カメラが撮影した撮影映像の同期信号が入力され、入力された同期信号に同期させて計測対象の位置データを算出することを特徴とする。
かかる構成によれば、位置計測装置は、撮影カメラが撮影映像を撮影したタイミングに同期させて、撮影カメラの位置データ及び姿勢データをカメラデータとして計測することができる。
【0026】
また、本願第8発明に係る位置計測装置は、位置データ算出手段において、記憶部が、さらに、撮影カメラが備えるズームレンズのリング回転量と撮影カメラの画角とを予め対応付けた撮影画角テーブルを記憶し、リング回転量を計測するエンコーダと、記憶部が記憶する撮影画角テーブルを参照して、エンコーダが計測したリング回転量から撮影カメラの画角を算出する画角算出部と、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、カメラデータに撮影カメラの画角を付加することができる。
【0027】
また、本願第9発明に係る位置計測システムは、本願第1発明から本願第8発明までの何れかに係る位置計測装置と、計測対象としての撮影カメラと、を備えることを特徴とする。
【発明の効果】
【0028】
本発明によれば、以下のような優れた効果を奏する。
本願1,9発明によれば、計測対象の移動速度に高い相関関係を有する最大荷重領域の速度を用いて、計測対象の移動速度を正確に算出できるため、位置データを高い精度で計測することができる。さらに、本願1,9発明によれば、足裏圧力計測手段が履物状又はシート状であるため、平坦でない場所でも位置データを計測でき、専用の大型装置を必要とせず、機動性に優れる。
【0029】
本願2,9発明によれば、人物の荷重バランスが崩れたときでも、この人物に保持された計測対象の位置ずれを補正できるため、位置データをより高い精度で計測することができる。
本願3,9発明によれば、足裏圧力計測手段を小型化できるため、機動性により優れる。さらに、本願3,9発明によれば、足裏圧力計測手段が人物と共に移動するため、位置データの計測範囲を極めて広くすることができる。
【0030】
本願4,9発明によれば、足裏圧力計測手段で一般的な感圧シートを用いるため、位置計測装置を簡素な構成とし、低コスト化を図ることができる。
本願5,9発明によれば、各個人に対応した対応テーブル及び誤差テーブルを用いて、相関関係の個人差を位置データに反映させるため、位置データをより高い精度で計測することができる。
【0031】
本願第6,9発明によれば、計測対象の位置データに加えて、姿勢データも計測することができる。
本願第7,9発明によれば、撮影カメラが撮影映像を撮影したタイミングに同期させて、カメラデータを計測するため、撮影映像とカメラデータとの時間軸が一致して、映像加工処理を効率的に行うことができる。
本願第8,9発明によれば、カメラデータに撮影カメラの画角が付加されるので、映像加工処理をより効率的に行うことができる。
【図面の簡単な説明】
【0032】
【図1】本発明の第1実施形態に係るカメラデータ計測システムの概略図である。
【図2】図1の圧力データ計測装置の構造を示す図である。
【図3】図2の圧力データ計測装置において、各手段の信号入出力を図示したブロック図である。
【図4】図1の演算装置の構成を示す図である。
【図5】図4の演算装置において、各手段の信号入出力を図示したブロック図である。
【図6】本発明の第1実施形態において、カメラマンが移動する様子を示した説明図である。
【図7】本発明の第1実施形態において、カメラマンが前進するときの最大荷重ベクトルを説明する図である。
【図8】本発明の第1実施形態において、カメラマンが左前方に移動するときの最大荷重ベクトルを説明する図である。
【図9】図5の演算装置が記憶する対応テーブルを説明する図である。
【図10】本発明の第1実施形態において、カメラマンの荷重バランスを説明する説明図である。
【図11】図5の演算装置が記憶する誤差テーブルを説明する図であり、(a)は前後両足の荷重バランスの関係を示し、(b)は荷重バランスと位置ずれ量との関係を示す。
【図12】図2の圧力データ計測装置の動作を示すフローチャートである。
【図13】図5の演算装置の動作を示すフローチャートである。
【図14】本発明の第2実施形態に係るカメラデータ計測装置の概略図である。
【図15】図14の感圧シートの構成を説明する図であり、(a)は感圧シートの断面図であり、(b)は感圧シートの上面図である。
【図16】図14の圧力データ計測装置において、各手段の信号入出力を図示したブロック図である。
【図17】本発明の第3実施形態に係るカメラデータ計測装置の概略図である。
【図18】本発明の第4実施形態において、エンコーダを説明する説明図である。
【図19】図18の演算装置において、各手段の信号入出力を図示したブロック図である。
【発明を実施するための形態】
【0033】
以下、本発明の実施形態について、適宜図面を参照しながら詳細に説明する。なお、各実施形態において、同一の機能を有する手段には同一の符号を付し、説明を省略した。
【0034】
(第1実施形態)
[カメラデータ計測システムの概略]
図1を参照して、本発明の第1実施形態に係るカメラデータ計測システム(位置計測システム)Sysの概略について説明する。
図1(a)に示すように、カメラデータ計測システムSysは、カメラデータ計測装置(位置計測装置)1と、計測対象としての撮影カメラ900とを備える。
このカメラデータ計測装置1は、撮影カメラ900の姿勢データと位置データとをカメラデータとして計測するものであり、圧力データ計測装置(足裏圧力計測手段)100と、演算装置(位置データ算出手段)200とを備える。
【0035】
圧力データ計測装置100は、履物状に形成されており、カメラマンCmの左右両足の足裏圧力を計測するものである。そして、圧力データ計測装置100は、計測した足裏圧力を圧力データとして、演算装置200に送信する。
【0036】
演算装置200は、圧力データ計測装置100から圧力データ(足裏圧力)を受信し、この足裏圧力が最大となる最大荷重領域に基づいて、移動するカメラマンCmに保持された撮影カメラ900の位置データを算出するものである。この演算装置200は、撮影カメラ900の後部に装着、固定される。また、演算装置200は、撮影カメラ900の姿勢データを計測し、この姿勢データと位置データとをカメラデータとして出力する。
【0037】
撮影カメラ900は、テレビ番組等の撮影映像を撮影するカメラであり、カメラマンCmが肩に載せて撮影を行う一般的な肩載式のカメラである。つまり、カメラマンCmは、撮影カメラ900を肩に載せた状態で、床や地面を前後左右に移動しながら撮影を行う。また、カメラマンCmが撮影ポジションを変えるため、撮影カメラ900を上下に移動させることもある。
【0038】
ここで、請求項に記載の「保持」には、撮影カメラ900をカメラマンCmの肩に載せた以外の状態だけでなく、計測対象を手に載せる、手で握る又は手で持ち上げるといった状態が含まれる。
【0039】
以下の説明では、図1(b)に示すように、x軸を左右方向とし、y軸を上下方向とし、z軸を前後方向とする。また、y軸が回転軸となる回転方向θをパン方向とし、x軸が回転軸となる回転方向φをチルト方向とし、z軸が回転軸となる回転方向Ψをヨー方向とする。
【0040】
[履物状感圧センサ]
<履物状感圧センサの構造>
図2を参照して、圧力データ計測装置100の構造を説明した後、図3を参照して、圧力データ計測装置100の信号処理を説明する。
図2に示すように、圧力データ計測装置100は、右足用の圧力データ計測装置100Rと、左足用の圧力データ計測装置100Lとで構成される。
なお、圧力データ計測装置100L,100Rが同一構成のため、圧力データ計測装置100Lのみ説明し、圧力データ計測装置100Rの説明を省略する。
【0041】
圧力データ計測装置100Lは、靴110Lと、感圧センサ120Lと、圧力データ送信部(送信部)130Lとを備える。
具体的には、圧力データ計測装置100Lは、靴110Lの靴底に感圧センサ120Lが装着(貼付)されている。この感圧センサ120Lは、靴110Lの靴底と同じ形状であり、靴110Lの靴底全面で足裏圧力を計測する。また、信号ケーブル120Laは、計測した足裏圧力を出力するため、感圧センサ120Lと圧力データ送信部130Lとの間を接続している。この圧力データ送信部130Lは、靴110Lのかかと側に固定された円筒状の筐体と、この筐体上部から突出したアンテナ130Laとで構成される。
【0042】
<履物状感圧センサの信号処理>
感圧センサ120Lは、カメラマンCmの足裏圧力を計測するものである。つまり、感圧センサ120Lは、撮影カメラ900を肩に載せたカメラマンCmが移動する際、このカメラマンCmの足裏のどの部分にどの程度の圧力が加わっているか計測する。そして、感圧センサ120Lは、計測した足裏圧力を圧力データ送信部130Lに出力する。
なお、感圧センサ120Lで足裏圧力を計測する原理は、後記する感圧シート140と同様のため、説明を省略する。
【0043】
圧力データ送信部130Lは、感圧センサ120Lから足裏圧力が入力され、この足裏圧力を圧力データとして演算装置200に送信するものである。ここで、圧力データ送信部130Lは、カメラマンCmの移動を妨げないために、無線通信を行うことが好ましい。また、圧力データ送信部130Lは、圧力データ計測装置100が圧力データ計測装置100L,100Rのペアのため、左足の圧力データであることの識別情報を、圧力データに付加することが好ましい。
なお、圧力データ送信部130Lは、一般的なネットワークインタフェースで実現できるため、詳細な説明を省略する。
【0044】
[演算装置の構成]
図4,図5を参照して、図1の演算装置200の構成について説明する。
図4に示すように、演算装置200は、ジャイロセンサ210と、加速度センサ220と、記憶部230(図5)と、圧力データ受信部240(受信部、図5)と、CPU(Central Processing Unit)250とを備える。
【0045】
演算装置200は、基板290の上段にジャイロセンサ210と加速度センサ220とが配置され、基板290の下段にCPU250が配置される。また、演算装置200は、ジャイロセンサ210及び加速度センサ220とCPU250との間で信号を入出力できるように、図示を省略した回路が形成される。そして、演算装置200は、前記した各手段が配置された基板290を、箱型の筐体291に収納する。さらに、演算装置200は、筐体291上部から突出したアンテナ292を備える。
【0046】
図5に示すように、ジャイロセンサ210は、パン方向ジャイロセンサ211と、チルト方向ジャイロセンサ213と、ヨー方向ジャイロセンサ215とで構成される。
パン方向ジャイロセンサ211は、演算装置200及びこの演算装置200が装着された撮影カメラ900について、パン方向の角速度を計測するものである。
チルト方向ジャイロセンサ213は、演算装置200及び撮影カメラ900について、チルト方向の角速度を計測するものである。
ヨー方向ジャイロセンサ215は、演算装置200及び撮影カメラ900について、ヨー方向の角速度を計測するものである。
そして、ジャイロセンサ210は、計測したパン方向、チルト方向及びヨー方向の角速度を速度データとしてCPU250に出力する。
【0047】
加速度センサ220は、左右方向加速度センサ221と、上下方向加速度センサ223と、前後方向加速度センサ225とで構成される。
左右方向加速度センサ221は、演算装置200及びこの演算装置200が装着された撮影カメラ900について、左右方向(x軸方向)の加速度を計測するものである。
上下方向加速度センサ223は、演算装置200及び撮影カメラ900について、上下方向(y軸方向)の加速度を計測するものである。
前後方向加速度センサ225は、演算装置200及び撮影カメラ900について、前後方向(z軸方向)の加速度を計測するものである。
そして、加速度センサ220は、計測した左右方向、上下方向及び前後方向の加速度を加速度データとしてCPU250に出力する。
【0048】
なお、ジャイロセンサ210及び加速度センサ220は、一般的なMEMS(Micro Electro Mechanical Systems)慣性センサを利用できるため、詳細な説明を省略する。このMEMS慣性センサは、コンパクトに集積可能であり、演算装置200の小型化に寄与する。
【0049】
記憶部230は、対応テーブルと、誤差テーブルとを記憶するメモリ、ハードディスク等の記憶装置である。
この対応テーブルは、移動するカメラマンCmに保持された撮影カメラ900の移動速度(以下、「カメラ速度」)と、カメラマンCmの左右両足の足裏圧力から求められた最大荷重領域の速度とを予め対応付けたものである。
この誤差テーブルは、カメラマンCmの前後に開いた両足(以下、「前後両足」)の荷重バランスと、カメラマンCmに保持された撮影カメラ900の位置ずれ量とを予め対応付けたものである。
【0050】
<最大荷重領域>
図6〜図11を参照して、対応テーブルの前提として最大荷重領域を説明した後、対応テーブル及び誤差テーブルの設定方法を順番に説明する(適宜図5参照)。
【0051】
図6に示すように、カメラマンCmが撮影カメラ900を肩に載せて、前進する状態を考える。また、撮影カメラ900は、カメラマンCmと同じ方向に移動することになり、撮影カメラ900及びカメラマンCmの移動方向を符号Dで図示した。この場合、図7に示すように、カメラマンCmの移動に伴って、カメラマンCmのつま先Egにおいて、最大荷重領域Aの位置が時間変化する。
【0052】
図7では、カメラマンCmの足裏全体Ftを点線で図示し、足裏全体Ftのうち、つま先Egを破線で図示した。
また、図7では、カメラマンCmの移動によるつま先Egの荷重分布を実線で図示した。この荷重分布は、例えば、円形又は楕円形のように表れる。そして、最大荷重領域Aは、この荷重分布が最大となる領域であり、図7にハッチングで図示した。
なお、図面を見やすくするため、図7(b)〜(d)では、移動方向D及び足裏全体Ftの図示を省略した。
【0053】
より具体的には、図7(a)に示すように、カメラマンCmが片足を踏み出した直後では(時刻T1)、最大荷重領域Aは、つま先Egの後方に位置する。次に、カメラマンCmが片足を踏み込んでいくと(時刻T2)、最大荷重領域Aの位置は、図7(b)に示すように、移動方向Dと同じ方向で、時刻T1よりもつま先Egの前方に動く。
【0054】
また、カメラマンCmが片足をより踏み込んでいくと(時刻T3)、最大荷重領域Aは、図7(c)に示すように、時刻T2よりもつま先Egの前方に動き、つま先Egの略中央に位置することになる。さらに、カメラマンCmが反対側の足に踏みかえる直前(時刻T4)、最大荷重領域Aは、図7(d)に示すように、時刻T3よりもつま先Egの前方に移動し、つま先Egの先端側に近づくことになる。
【0055】
図8を参照して、カメラマンCmが左前方に移動する場合についても、説明する。
まず、カメラマンCmが片足を踏み出した直後では(時刻T1)、最大荷重領域Aは、図8(a)に示すように、つま先Egの後方に位置する。次に、カメラマンCmが片足を踏み込んでいくと(時刻T2,T3)、最大荷重領域Aの位置は、図8(b),(c)に示すように、つま先Egの左前方に動く。さらに、カメラマンCmが反対側の足に踏みかえる直前(時刻T4)、最大荷重領域Aは、図8(d)に示すように、時刻T3よりもつま先Egの左前方に動き、つま先Egの先端左側に近づく。
【0056】
従って、図7,図8に示すように、最大荷重領域Aの方向は、移動方向Dと同じ方向になる。また、最大荷重領域Aの位置は、時刻T1〜T4の間で時間変化するため、この時間変化から最大荷重領域Aの速度を求めることができる。
【0057】
ここで、最大荷重領域Aの速度が速くなるほどカメラマンCmの移動速度も速く、最大荷重領域Aの速度が遅くなるほどカメラマンCmの移動速度も遅くなる。このように、カメラマンCmの移動速度と、最大荷重領域Aの速度との間には、高い相関関係がある。さらに、撮影カメラ900は、カメラマンCmと共に移動するから、カメラマンCmと同じ移動速度及び移動方向になる。従って、カメラ速度と、最大荷重領域Aの速度との間には、高い相関関係があると言える。
【0058】
なお、時刻T1〜T4のそれぞれで、最大荷重領域A1〜A4(A)の方向及び速度をベクトル表記したものが、最大荷重ベクトルV1〜V4(V)である。つまり、最大荷重ベクトルVは、その方向が最大荷重領域Aの方向を示し、その大きさが最大荷重領域Aの速度を示す。
また、カメラマンCmが足を踏みかえるときに、左右両足で同時に最大荷重領域Aが現れる場合も考えられるが、極めて短時間のため、これを無視して扱ってもよい。
【0059】
<対応テーブルの設定方法:キャリブレーション>
続いて、キャリブレーションによって対応テーブルを設定する方法について、具体的に説明する。
なお、キャリブレーションとは、カメラ速度と最大荷重領域Aの速度とを対応付けることである。
【0060】
図6に示すように、カメラマンCmは、圧力データ計測装置100を履いて足裏圧力を計測可能な状態とし、撮影カメラ900を肩に載せる。このとき、撮影カメラ900の位置変化を計測するために、例えば、撮影カメラ900の後方に、レーザ測距計や3次元位置計測センサ等の位置変化計測装置(不図示)を配置する。
【0061】
また、本実施形態では、圧力データ計測装置100が履物状であるため、カメラマンCmの絶対位置(絶対座標)を計測することができない。このため、キャリブレーションは、予め設定されたキャリブレーション原点にカメラマンCmが位置した状態で開始することとする。
【0062】
まず、カメラマンCmは、低速なカメラワークを想定して、前後左右、様々な方向に移動する。このとき、圧力データ計測装置100でカメラマンCmの足裏圧力を計測しながら、位置変化計測装置で撮影カメラ900の位置変化を計測する。そして、足裏圧力から最大荷重領域Aの速度を求め、撮影カメラ900の位置変化から、カメラ速度を求める。
【0063】
ここで、最大荷重領域Aの速度とカメラ速度との相関関係は、例えば、図9に示すようなガウス分布となる。この図9では、低速なカメラワークでのガウス分布を破線、通常のカメラワークでのガウス分布を実線、高速なカメラワークでのガウス分布を一点鎖線で図示した。
【0064】
キャリブレーションの手法は、特に制限されないが、本実施形態では、ガウス分布のピークを用いる。低速なカメラワークの場合、最大荷重領域Aの速度がピークとなるVa1と、このときのカメラ速度Vb1とが対応付けられる(図9の破線)。また、通常のカメラワークの場合、最大荷重領域の速度Va2と、カメラ速度Vb2とが対応付けられる(図9の実線)。さらに、高速なカメラワークの場合、最大荷重領域の速度Va3と、カメラ速度Vb3とが対応付けられる(図9の一点鎖線)。このように、低速、通常、高速等の様々な速度でカメラワークを想定して、キャリブレーションを繰り返し行う。
【0065】
ここで、キャリブレーション後に相関関係を示すデータが不足する場合、内挿等の補間処理で対応テーブルの不足データを補うことが好ましい。
また、最大荷重領域Aは、例えば、カメラマンCmの個人差や圧力データ計測装置100の計測精度に起因して、図7のように一定の形状を保たずに、様々な形状に変化する場合もある。この場合、最大荷重領域Aの重心位置を求め、最大荷重領域Aの重心位置の速度と、カメラ速度とを対応付けてもよい。
【0066】
<誤差テーブルの設定方法>
図10に示すように、カメラマンCmの前後両足の荷重バランスが不均衡な場合、肩に載せられた撮影カメラ900の位置は、前後に誤差(位置ずれ)を有することが多い。そして、撮影カメラ900の位置は、荷重バランスが前後で不均衡になると、前後に規則性をもって変化する。従って、カメラマンCmが荷重バランスを前後に変化させながら、基準位置に対する撮影カメラ900の位置ずれ量を位置変化計測装置で計測する。
なお、前後の荷重バランスが均衡な状態での撮影カメラ900の位置を、基準位置とする。
【0067】
図11(a)に示すように、荷重バランスは、カメラマンCmの前足に全荷重が加わった状態では、前足の足裏圧力が100%で後足の足裏圧力が0%となる。また、荷重バランスは、カメラマンCmの前後両足の荷重が均衡な状態では、前後両足の足裏圧力が共に50%となる。さらに、荷重バランスは、カメラマンCmの後足に全荷重が加わった状態では、後足の足裏圧力が100%で前足の足裏圧力が0%となる。つまり、図11(a)に示すように、後足両足の足裏圧力を合計すると、100%になる。
この図11(a)では、縦軸が前足の足裏圧力であり、横軸が後足の足裏圧力である。
【0068】
このとき、図11(b)に示すように、撮影カメラ900は、カメラマンCmの前足に全荷重が加わった状態だと、前方への位置ずれ量が大きくなる。また、撮影カメラ900は、カメラマンCmの前後両足の荷重が均衡な状態だと、基準位置にあるために、位置ずれが全くない。そして、撮影カメラ900は、カメラマンCmの後足に全荷重が加わった状態だと、後方への位置ずれ量が大きくなる。つまり、誤差テーブルは、図11(b)に示すように、荷重バランスと、位置ずれ量とを対応付けたものである。
この図11(b)では、縦軸が位置ずれ量であり、横軸が図11(a)の荷重バランスに対応する。
【0069】
図5に戻り、演算装置200の構成について、説明を続ける。
圧力データ受信部240は、圧力データ計測装置100L,100Rのそれぞれから、左右両足の足裏圧力を圧力データとして受信するものである。そして、圧力データ受信部240は、受信した左右両足の圧力データをCPU250に出力する。この圧力データ受信部240は、一般的なネットワークインタフェースで実現できるため、詳細な説明を省略する。
【0070】
CPU250は、演算装置200での各種演算を行うものであり、最大荷重ベクトル生成部251と、カメラ速度算出部(移動速度算出部)252と、カメラ方向算出部(移動方向算出部)253と、カメラ位置算出部(計測対象位置算出部)254と、荷重バランス算出部255と、カメラ位置補正部(位置データ補正部)256と、姿勢データ算出部257とを備える。ここで、CPU250は、ジャイロセンサ210から速度データが入力され、加速度センサ220から加速度データが入力され、圧力データ受信部240から左右両足の圧力データが入力される。
【0071】
最大荷重ベクトル生成部251は、左右両足の圧力データ(足裏圧力)が最大となる最大荷重領域Aを求め、この最大荷重領域Aの時間変化により最大荷重領域Aの方向及び速度を示す最大荷重ベクトルVを生成するものである。
カメラ速度算出部252は、記憶部230に記憶された対応テーブルを参照して、最大荷重ベクトルVの大きさで表される最大荷重領域Aの速度から、カメラ速度を算出するものである。
【0072】
カメラ方向算出部253は、最大荷重ベクトルVの方向(最大荷重領域Aの方向)を、撮影カメラ900の移動方向(以下、「カメラ方向」)として算出するものである。
カメラ位置算出部254は、カメラ速度算出部252で算出されたカメラ速度と、カメラ方向算出部253で算出されたカメラ方向とに基づいて、撮影カメラ900の位置を示す位置データを算出するものである。
【0073】
<位置データの算出>
図7を参照して、最大荷重ベクトル生成部251が最大荷重ベクトルV1を生成してから、カメラ位置算出部254が位置データを算出するまでの処理を具体的に説明する(適宜図5参照)。
【0074】
図7(a)に示すように、最大荷重ベクトル生成部251は、カメラマンCmが片足を踏み込む前の時刻T0から時刻T1までの最大荷重領域A1の時間変化により、時刻T1での最大荷重ベクトルV1を求める。また、カメラ速度算出部252は、対応テーブルを参照して、最大荷重ベクトルV1の大きさで表される最大荷重領域A1の速度から、時刻T1でのカメラ速度を算出する。言い換えるなら、カメラ速度算出部252は、対応テーブルから、最大荷重領域A1の速度に対応するカメラ速度を読み出す。そして、カメラ方向算出部253は、最大荷重ベクトルV1の方向(最大荷重領域A1の方向)を、時刻T1でのカメラ方向として算出する。
【0075】
図7(b)に示すように、最大荷重ベクトル生成部251は、時刻T1から時刻T2までの最大荷重領域A2の時間変化により、時刻T2での最大荷重ベクトルV2を求める。また、カメラ速度算出部252は、対応テーブルを参照して、最大荷重ベクトルV2の大きさから、時刻T2でのカメラ速度を算出する。そして、カメラ方向算出部253は、最大荷重ベクトルV2の方向を、時刻T2でのカメラ方向として算出する。
なお、時刻T3,T4でカメラ速度及びカメラ方向を算出する処理は、時刻T1,T2と同様のため、説明を省略する。
【0076】
その後、カメラ位置算出部254は、時刻T1から時刻T4までのカメラ速度を積分して、時刻T1から時刻T4までの撮影カメラ900の移動距離を求める。さらに、カメラ位置算出部254は、時刻T1から時刻T4までのカメラ方向が全て同一方向になるため、カメラ方向に撮影カメラ900移動距離だけ離れた位置を、時刻T4での位置データとして算出する。
【0077】
ここで、前記したように、最大荷重領域Aは、図7のように一定の形状を保たずに、様々な形状に変化する場合もある。この場合、最大荷重ベクトル生成部251は、最大荷重領域Aの重心位置を求め、最大荷重領域Aの重心位置の時間変化により、最大荷重ベクトルVを求めてもよい。
【0078】
なお、時刻T1から時刻T4までの計算間隔で位置データを算出する例で説明したが、カメラ位置算出部254は、この計算間隔を任意に設定できる。
また、本実施形態では、圧力データ計測装置100が履物状であるため、カメラマンCmの絶対位置(絶対座標)を計測することができない。このため、カメラデータ計測装置1は、キャリブレーション原点にカメラマンCmが位置した状態で、位置データの算出を開始することとする。そして、カメラデータ計測装置1は、計算間隔ごとに、撮影カメラ900の相対的な位置を示す位置データを算出する。
【0079】
図5に戻り、演算装置200の構成について、説明を続ける。
前記したように、圧力データは、左右何れの足であるかの識別情報が付加されている。また、カメラマンCmは、両足をそろえた状態で左右どちらの足を最初に踏み出すのか癖として決まっており、その後、左右の足を交互に踏みこむ。従って、荷重バランス算出部255は、カメラマンCmが最初に踏み出す足の情報を予め設定すると共に、左右の足裏圧力の最大値が反転したときに左右の足が踏み替えられたと判定する。これによって、荷重バランス算出部255は、受信した圧力データが前足又は後足の何れに対応するかを識別して、左右両足の足裏圧力の比によって、前後両足の荷重バランスを算出することができる。
【0080】
カメラ位置補正部256は、記憶部230に記憶された誤差テーブルを参照して(図11)、荷重バランス算出部255が算出した荷重バランスから、カメラ位置算出部254で算出された位置データの位置ずれ量を算出して補正するものである。言い換えるなら、カメラ位置補正部256は、誤差テーブルから、荷重バランスに対応する位置ずれ量を読み出す。そして、カメラ位置補正部256は、この位置ずれ量だけ撮影カメラ900の位置を前方又は後方に移動させるように、位置データを補正する。
【0081】
姿勢データ算出部257は、ジャイロセンサ210からの速度データと加速度センサ220からの加速度データとから、撮影カメラ900の向きを示す姿勢データを算出するものである。ここで、加速度データにより撮影カメラ900がどちらの方向に移動しようとしたか分かる。従って、姿勢データ算出部257は、例えば、加速度センサ220からの加速度データに、ジャイロセンサ210からの速度データに相乗しているクロストーク分を補正して積分処理を行う。このようにして、姿勢データ算出部257は、パン方向、チルト方向及びヨー方向について、撮影カメラ900の姿勢データ(Pθ,Pφ,PΨ)を算出する。
【0082】
その後、CPU250は、カメラ位置補正部256が補正した位置データと、姿勢データ算出部257が算出した姿勢データとを、カメラデータとして出力する。
なお、速度データ及び加速度データから姿勢データを算出する方法は、MEMS慣性センサの実装に依存する一般的な処理のため、詳細な説明を省略する。
【0083】
[履物状感圧センサの動作]
図12を参照して、図3の圧力データ計測装置100の動作について説明する(適宜図3参照)。
圧力データ計測装置100は、感圧センサ120によって、カメラマンCmの足裏圧力(圧力データ)を計測する(ステップS1)。
圧力データ計測装置100は、圧力データ送信部130によって、感圧センサ120で計測された圧力データを演算装置200に送信する(ステップS2)。
【0084】
[演算装置の動作]
図13を参照して、図5の演算装置200の動作について説明する(適宜図3参照)。
演算装置200は、キャリブレーションによって設定した対応テーブルと、誤差テーブルとを、予め記憶部230に記憶する(ステップS11)。
【0085】
演算装置200は、ジャイロセンサ210によって、速度データを計測する(ステップS12)。
演算装置200は、加速度センサ220によって、加速度データを計測する(ステップS13)。
演算装置200は、姿勢データ算出部257によって、速度データ及び加速度データから姿勢データを算出する(ステップS14)。
【0086】
演算装置200は、圧力データ受信部240によって、左右両足の圧力データを受信する(ステップS15)。
演算装置200は、最大荷重ベクトル生成部251によって、圧力データが最大となる最大荷重領域を求め、この最大荷重領域Aの時間変化により最大荷重領域の方向及び速度を示す最大荷重ベクトルを生成する(ステップS16)。
【0087】
演算装置200は、カメラ速度算出部252によって、対応テーブルを参照して、最大荷重ベクトルVの大きさで表される最大荷重領域Aの速度から、カメラ速度を算出する(ステップS17)。
演算装置200は、カメラ方向算出部253によって、最大荷重ベクトルの方向をカメラ方向として算出する(ステップS18)。
演算装置200は、カメラ位置算出部254によって、カメラ速度と、カメラ方向とに基づいて位置データを算出する(ステップS19)。
【0088】
演算装置200は、荷重バランス算出部255によって、左右両足の圧力データの比から荷重バランスを算出する(ステップS20)。
演算装置200は、カメラ位置補正部256によって、誤差テーブルを参照して、荷重バランスから撮影カメラ900の位置ずれ量を算出し、この位置ずれ量で位置データを補正する(ステップS21)。
その後、演算装置200は、CPU250によって、撮影カメラ900の位置データと姿勢データとを、カメラデータとして出力する。
【0089】
以上のように、本発明の第1実施形態に係るカメラデータ計測装置1は、カメラ速度に高い相関を有する最大荷重領域の速度を用いて、カメラ速度を正確に算出できるため、カメラデータを高い精度で計測することができる。さらに、カメラデータ計測装置1は、足裏圧力計測装置100が履物状のために、この足裏圧力計測装置100を小型化でき、機動性により優れる。
【0090】
また、カメラデータ計測装置1は、足裏圧力計測装置100がカメラマンCmと共に移動するため、平坦でない場所を含め、カメラデータの計測範囲を極めて広くすることができる。さらに、カメラデータ計測装置1は、カメラマンCmの荷重バランスが崩れたときでも、このカメラマンCmの肩に載せた撮影カメラ900の位置ずれを補正するので、カメラデータをより高い精度で計測することができる。
【0091】
そして、このカメラデータを用いれば、撮影映像にCGや他の映像を合成する、撮影映像の一部に追随して映像効果を加える等の映像加工処理が可能になり、映像表現の幅を拡大することができる。これによって、カメラデータ計測装置1のユーザは、映画のような大スペクタクルな映像をテレビ番組として容易に制作できるようになり、迫力があって分かり易い映像を視聴者に提供することができる。
【0092】
さらに、個人情報保護の観点からニュース番組等において、映像の一部にぼかしを加えて人物等の判別を困難にする映像加工処理を施す機会も増加している。このような場合、カメラデータ計測装置1のユーザは、その映像加工処理を効率的に行うことができる。
【0093】
なお、第1実施形態では、撮影カメラ900の姿勢データを計測するため、圧力データ計測装置100と、演算装置200とを独立させたが、本発明は、これに限定されない。例えば、この姿勢データを計測しない場合、圧力データ計測装置100が演算装置200を内蔵してもよい。
【0094】
なお、第1実施形態では、撮影カメラ900が計測対象であることとして説明したが、本発明は、これに限定されない。つまり、本発明は、人物が保持できれば何れの物体を計測対象としてもよい。
【0095】
(変形例1)
図5に戻り、本発明の第1実施形態に係るカメラデータ計測装置1について、変形例を説明する。
カメラ速度と最大荷重領域の速度との相関関係や、前後両足の荷重バランスと撮影カメラ900の位置ずれ量との相関関係は、カメラマンCmごとの個人差が大きく表れる。
このため、記憶部230は、各カメラマンCmに対応した対応テーブル及び誤差テーブルを予め記憶する。そして、カメラデータ計測装置1は、カメラマンCmの認証処理を行い、認証されたカメラマンCmに対応した対応テーブル及び誤差テーブルを用いて、カメラデータを計測する。
【0096】
以上のように、本発明の変形例1に係るカメラデータ計測装置1は、前記した相関関係の個人差をカメラデータに反映させるので、カメラデータをより高い精度で計測することができる。
【0097】
(第2実施形態)
[位置センサの構成]
図14〜図16を参照して、本発明の第2実施形態に係るカメラデータ計測装置1Bについて、第1実施形態と異なる点を説明する。
カメラデータ計測装置1Bは、履物状の圧力データ計測装置100(図2)の代わりに、シート状の圧力データ計測装置100Bを備える点が第1実施形態と異なる。
【0098】
図14に示すように、カメラマンCmの足下には、感圧シート140が敷かれている。この感圧シート140は、カメラマンCmの移動範囲を少なくともカバーしており、例えば、長方形、正方形、円形、楕円形等の任意形状にできる。また、信号ケーブル140aは、計測した足裏圧力を出力するため、感圧シート140と圧力データ送信部130との間を接続している。
【0099】
ここで、感圧シート140は、図15(a)に示すように、導電性材料からなる表面層141と抵抗材料からなる裏面層145とで、導電性ゴムからなる中間層143を挟むサンドイッチ構造になっている。また、感圧シート140は、図15(b)に示すように、表面層141から見て、縦横メッシュ状に抵抗値の変化を計測できる。つまり、感圧シート140は、カメラマンCmのつま先Egにより表面層141に圧力が加わると、その大きさと面積に応じて抵抗値が変化することになる。これを利用して、感圧シート140は、足裏圧力が加わった位置(絶対座標)と、足裏圧力の大きさとを計測する。その後、感圧シート140は、図16に示すように、計測した足裏圧力の位置及び大きさを、圧力データとして圧力データ送信部130に出力する。
【0100】
ここで、最大荷重領域Aは、感圧シート140で計測された足裏圧力が図15(b)の1メッシュで最大となる場合、その1メッシュ(1点)になる。また、最大荷重領域Aは、感圧シート140で計測された足裏圧力が図15(b)の複数メッシュで最大となる場合、それら全てのメッシュが結合した領域になる。
【0101】
以上のように、本発明の第2実施形態に係るカメラデータ計測装置1Bは、一般的な感圧シート140を用いるため、簡素な構成とし、低コスト化を図ることができる。さらに、カメラデータ計測装置1Bは、足裏圧力を絶対座標系で計測するため、カメラデータを絶対座標系で表すことができる。
【0102】
なお、第2実施形態では、感圧シート140が足裏圧力を絶対座標系で計測するため、キャリブレーション及び位置データの計測は、キャリブレーション原点にカメラマンCmが位置した状態で開始しなくともよい。
また、第2実施形態では、足裏圧力が絶対座標系で計測されるため、荷重バランス算出部255(図5)は、その絶対座標を用いて、左右両足の圧力データが前足又は後足に対応するか識別してもよい。
【0103】
(第3実施形態)
[カメラデータ計測装置の構成]
図17を参照して、本発明の第3実施形態に係るカメラデータ計測装置1Cの構成について、第2実施形態と異なる点を説明する。
【0104】
カメラデータは、主に、撮影映像の合成に利用されるものである。このため、撮影映像を構成する1枚1枚のフレーム画像ごとに、カメラデータが必要となる。その一方、圧力データ計測装置100B、ジャイロセンサ210及び加速度センサ220は、撮影映像の合成を意識したものでなく、圧力データ、速度データ及び加速度データの計測タイミングが、各フレーム画像に同期していないことが多い。そこで、カメラデータ計測装置1Cは、映像加工処理を確実に行うため、撮影映像の同期信号(垂直同期信号)ごとに、カメラデータを計測する。
【0105】
具体的には、カメラデータ計測装置1Cは、図17に示すように、撮影カメラ900から同期信号が入力される。そして、CPU250Cは、圧力データ計測装置100Bからの圧力データと、ジャイロセンサ210からの速度データと、加速度センサ220からの加速度データとを、同期信号が入力されたタイミングでサンプリングする。そして、CPU250Cは、サンプリングした圧力データと速度データと加速度データとを用いて、同期信号ごとにカメラデータを計測する。
なお、同期信号を用いる以外、カメラデータ計測装置1Cの各手段は、図5と同様のため、詳細な説明を省略する。
【0106】
以上のように、本発明の第3実施形態に係るカメラデータ計測装置1Cは、計測したカメラデータが各フレーム画像に同期するため、映像加工処理を効率的に行うことができる。
【0107】
なお、第3実施形態では、同期信号ごとにカメラデータを計測する例で説明したが、本発明は、これに限定されない。例えば、カメラデータ計測装置1Cは、圧力データ計測装置100B、ジャイロセンサ210及び加速度センサ220の計測周波数を、撮影映像の同期信号よりも十分に速い周波数とする。そして、カメラデータ計測装置1Cは、この計測周波数でカメラデータを計測し、各フレーム画像の撮影時間に一致するカメラデータ、又は、この撮影時間に最も近いカメラデータを出力してもよい。
【0108】
(第4実施形態)
[カメラデータ計測装置の構成]
図18,図19を参照して、本発明の第4実施形態に係るカメラデータ計測装置1Dの構成について、第1実施形態と異なる点を説明する。
カメラデータ計測装置1Dは、撮影カメラ900の撮影画角を算出して、カメラデータに付加する点が、第2実施形態と大きく異なる。
【0109】
図18に示すように、撮影カメラ900は、回転リング920を回転させることで、撮影画角を変更可能なズームレンズ910を備える。この撮影カメラ900は、回転リング920にエンコーダ270が取り付けられている。
【0110】
エンコーダ270は、回転リング920のリング回転量を計測するものである。このエンコーダ270は、ケーブル272を介して計測部260に接続されており、計測したリング回転量を計測部260(図19のCPU250D)に出力する。
【0111】
図19に示すように、演算装置200Dは、図5の演算装置200において、記憶部230の代わりに記憶部230Bを備え、画角算出部258とエンコーダ270とを追加したものである。
【0112】
記憶部230Bは、さらに、撮影画角テーブルを記憶する。
この撮影画角テーブルは、リング回転量と、撮影カメラ900の撮影画角とを予め対応付けたものである。
【0113】
CPU250Dは、最大荷重ベクトル生成部251と、カメラ速度算出部252と、カメラ方向算出部253と、カメラ位置算出部254と、荷重バランス算出部255と、カメラ位置補正部256と、姿勢データ算出部257、画角算出部258とを備える。ここで、CPU250Dは、速度データと、加速度データと、圧力データとに加え、エンコーダ270からリング回転量が入力される。
【0114】
画角算出部258は、記憶部230Bに記憶された撮影画角テーブルを参照して、CPU250Dに入力されたリング回転量から撮影カメラ900の撮影画角を算出するものである。言い換えるなら、画角算出部258は、入力されたリング回転量に対応付けられた撮影カメラ900の撮影画角を、撮影画角テーブルから読み出すことになる。
【0115】
その後、CPU250Dは、画角算出部258が算出した撮影画角を、カメラデータに付加して出力する。
以上のように、本発明の第4実施形態に係るカメラデータ計測装置1Dは、位置データ及び姿勢データに加えて、撮影画角もカメラデータとして計測することができる。
【0116】
なお、第4実施形態において、カメラデータの精度をさらに高くしたい場合、撮影カメラ900のフォーカスリングにもエンコーダを取り付けて、焦点位置による画角の変化を反映させてもよい。
【0117】
なお、第4実施形態では、画角算出部258が撮影画角を算出する例で説明したが、本発明は、これに限定されない。例えば、ズームレンズ内に画角を検出するためのエンコーダが内蔵された撮影カメラの場合、本発明は、デジタルデータとして、ズームレンズのコネクター経由で撮影カメラの画角を取得することもできる。
【0118】
なお、第3,4実施形態では、第2実施形態に係るカメラデータ計測装置1Bへの適用例を説明したが、本発明は、これに限定されない。つまり、第3,4実施形態の手法は、第1実施形態に係るカメラデータ計測装置1にも適用することもできる。
【産業上の利用可能性】
【0119】
本発明は、VFX映画等の映画制作や、高度な合成を必要とするドラマ番組、情報番組、迅速なポストプロダクション処理が要求される報道番組等の番組制作に利用することができる。
【符号の説明】
【0120】
1,1B,1C,1D カメラデータ計測装置(位置計測装置)
100,100B,100L,100R 圧力データ計測装置(足裏圧力計測手段)
110L,110R 靴
120,120L,120R 感圧センサ
130,130L,130R 圧力データ送信部(送信部)
140 感圧シート
140a 信号ケーブル
141 表面層
143 中間層
145 裏面層
200,200C,200D 演算装置(位置データ算出手段)
210 ジャイロセンサ
211 パン方向ジャイロセンサ
213 チルト方向ジャイロセンサ
215 ヨー方向ジャイロセンサ
220 加速度センサ
221 左右方向加速度センサ
223 上下方向加速度センサ
225 前後方向加速度センサ
230 記憶部
240 圧力データ受信部(受信部)
250,250C,250D CPU
251 最大荷重ベクトル生成部
252 カメラ速度算出部(移動速度算出部)
253 カメラ方向算出部(移動方向算出部)
254 カメラ位置算出部(計測対象位置算出部)
255 荷重バランス算出部
256 カメラ位置補正部(位置データ補正部)
257 姿勢データ算出部
258 画角算出部
260 計測部
270 エンコーダ
290 基板
291 筐体
292 アンテナ
900 撮影カメラ(計測対象)
910 ズームレンズ
920 回転リング
Sys カメラデータ計測システム(位置計測システム)
【特許請求の範囲】
【請求項1】
移動する人物の足裏圧力を計測する履物状又はシート状の足裏圧力計測手段と、前記足裏圧力が最大となる最大荷重領域に基づいて、移動する前記人物に保持された計測対象の位置データを算出する位置データ算出手段と、を備える位置計測装置であって、
前記位置データ算出手段は、
移動する前記人物に保持された前記計測対象の移動速度と、当該人物の両足の足裏圧力から求められた前記最大荷重領域の速度とが予め対応付けられた対応テーブルを記憶する記憶部と、
前記足裏圧力計測手段で計測された足裏圧力が最大となる前記最大荷重領域を求め、前記最大荷重領域の時間変化により当該最大荷重領域の方向及び速度を示す最大荷重ベクトルを生成する最大荷重ベクトル生成部と、
前記記憶部に記憶された対応テーブルを参照して、前記最大荷重ベクトルの大きさで表される前記最大荷重領域の速度から、前記計測対象の移動速度を算出する移動速度算出部と、
前記最大荷重ベクトルの方向を前記計測対象の移動方向として算出する移動方向算出部と、
前記移動速度算出部で算出された計測対象の移動速度と、前記計測対象の移動方向とに基づいて、前記計測対象の位置データを算出する計測対象位置算出部と、
を備えることを特徴とする位置計測装置。
【請求項2】
前記位置データ算出手段は、
前記記憶部が、さらに、人物の両足の荷重バランスと、当該人物に保持された前記計測対象の位置ずれ量とが予め対応付けられた誤差テーブルを記憶し、
前記足裏圧力計測手段で計測された両足の足裏圧力の比によって、前記荷重バランスを算出する荷重バランス算出部と、
前記記憶部に記憶された誤差テーブルを参照して、前記荷重バランス算出部が算出した荷重バランスから前記計測対象の位置ずれ量を算出し、算出した当該位置ずれ量によって前記計測対象位置算出部で算出された位置データを補正する位置データ補正部と、
をさらに備えることを特徴とする請求項1に記載の位置計測装置。
【請求項3】
前記足裏圧力計測手段は、
前記人物の履物の靴中又は靴底に装着され、当該人物の足裏圧力を計測する感圧センサと、
前記感圧センサで計測された足裏圧力を前記位置データ算出手段に送信する送信部と、
を備えることを特徴とする請求項1又は請求項2に記載の位置計測装置。
【請求項4】
前記足裏圧力計測手段は、
前記人物の足裏圧力を計測する感圧シートと、
前記感圧シートで計測された足裏圧力を前記位置データ算出手段に送信する送信部と、
を備えることを特徴とする請求項1又は請求項2に記載の位置計測装置。
【請求項5】
前記記憶部は、前記人物ごとに、前記対応テーブルと前記誤差テーブルとを記憶し、
前記移動速度算出部は、前記人物ごとの対応テーブルを参照して、前記計測対象の移動速度を算出し、
前記位置データ補正部は、前記人物ごとの誤差テーブルを参照して、前記位置データの位置ずれ量を補正する
ことを特徴とする請求項2から請求項4の何れか一項に記載の位置計測装置。
【請求項6】
前記位置データ算出手段は、
前記計測対象の3次元方向の加速度を計測する加速度センサと、
前記計測対象のパン方向、チルト方向及びヨー方向の角速度を計測するジャイロセンサと、
前記ジャイロセンサが計測した角速度と前記加速度センサが計測した加速度とから、前記計測対象の向きを示す姿勢データを算出する姿勢データ算出部と、
を備えることを特徴とする請求項1から請求項5の何れか一項に記載の位置計測装置。
【請求項7】
前記位置データ算出手段は、前記計測対象としての撮影カメラに装着され、
前記計測対象位置算出部は、前記撮影カメラが撮影した撮影映像の同期信号が入力され、入力された前記同期信号に同期させて前記計測対象の位置データを算出することを特徴とする請求項6に記載の位置計測装置。
【請求項8】
前記位置データ算出手段は、
前記記憶部が、さらに、前記撮影カメラが備えるズームレンズのリング回転量と前記撮影カメラの画角とを予め対応付けた撮影画角テーブルを記憶し、
前記リング回転量を計測するエンコーダと、
前記記憶部が記憶する撮影画角テーブルを参照して、前記エンコーダが計測したリング回転量から前記撮影カメラの画角を算出する画角算出部と、
を備えることを特徴とする請求項7に記載の位置計測装置。
【請求項9】
請求項1から請求項8の何れか一項に記載の位置計測装置と、
前記計測対象としての撮影カメラと、
を備えることを特徴とする位置計測システム。
【請求項1】
移動する人物の足裏圧力を計測する履物状又はシート状の足裏圧力計測手段と、前記足裏圧力が最大となる最大荷重領域に基づいて、移動する前記人物に保持された計測対象の位置データを算出する位置データ算出手段と、を備える位置計測装置であって、
前記位置データ算出手段は、
移動する前記人物に保持された前記計測対象の移動速度と、当該人物の両足の足裏圧力から求められた前記最大荷重領域の速度とが予め対応付けられた対応テーブルを記憶する記憶部と、
前記足裏圧力計測手段で計測された足裏圧力が最大となる前記最大荷重領域を求め、前記最大荷重領域の時間変化により当該最大荷重領域の方向及び速度を示す最大荷重ベクトルを生成する最大荷重ベクトル生成部と、
前記記憶部に記憶された対応テーブルを参照して、前記最大荷重ベクトルの大きさで表される前記最大荷重領域の速度から、前記計測対象の移動速度を算出する移動速度算出部と、
前記最大荷重ベクトルの方向を前記計測対象の移動方向として算出する移動方向算出部と、
前記移動速度算出部で算出された計測対象の移動速度と、前記計測対象の移動方向とに基づいて、前記計測対象の位置データを算出する計測対象位置算出部と、
を備えることを特徴とする位置計測装置。
【請求項2】
前記位置データ算出手段は、
前記記憶部が、さらに、人物の両足の荷重バランスと、当該人物に保持された前記計測対象の位置ずれ量とが予め対応付けられた誤差テーブルを記憶し、
前記足裏圧力計測手段で計測された両足の足裏圧力の比によって、前記荷重バランスを算出する荷重バランス算出部と、
前記記憶部に記憶された誤差テーブルを参照して、前記荷重バランス算出部が算出した荷重バランスから前記計測対象の位置ずれ量を算出し、算出した当該位置ずれ量によって前記計測対象位置算出部で算出された位置データを補正する位置データ補正部と、
をさらに備えることを特徴とする請求項1に記載の位置計測装置。
【請求項3】
前記足裏圧力計測手段は、
前記人物の履物の靴中又は靴底に装着され、当該人物の足裏圧力を計測する感圧センサと、
前記感圧センサで計測された足裏圧力を前記位置データ算出手段に送信する送信部と、
を備えることを特徴とする請求項1又は請求項2に記載の位置計測装置。
【請求項4】
前記足裏圧力計測手段は、
前記人物の足裏圧力を計測する感圧シートと、
前記感圧シートで計測された足裏圧力を前記位置データ算出手段に送信する送信部と、
を備えることを特徴とする請求項1又は請求項2に記載の位置計測装置。
【請求項5】
前記記憶部は、前記人物ごとに、前記対応テーブルと前記誤差テーブルとを記憶し、
前記移動速度算出部は、前記人物ごとの対応テーブルを参照して、前記計測対象の移動速度を算出し、
前記位置データ補正部は、前記人物ごとの誤差テーブルを参照して、前記位置データの位置ずれ量を補正する
ことを特徴とする請求項2から請求項4の何れか一項に記載の位置計測装置。
【請求項6】
前記位置データ算出手段は、
前記計測対象の3次元方向の加速度を計測する加速度センサと、
前記計測対象のパン方向、チルト方向及びヨー方向の角速度を計測するジャイロセンサと、
前記ジャイロセンサが計測した角速度と前記加速度センサが計測した加速度とから、前記計測対象の向きを示す姿勢データを算出する姿勢データ算出部と、
を備えることを特徴とする請求項1から請求項5の何れか一項に記載の位置計測装置。
【請求項7】
前記位置データ算出手段は、前記計測対象としての撮影カメラに装着され、
前記計測対象位置算出部は、前記撮影カメラが撮影した撮影映像の同期信号が入力され、入力された前記同期信号に同期させて前記計測対象の位置データを算出することを特徴とする請求項6に記載の位置計測装置。
【請求項8】
前記位置データ算出手段は、
前記記憶部が、さらに、前記撮影カメラが備えるズームレンズのリング回転量と前記撮影カメラの画角とを予め対応付けた撮影画角テーブルを記憶し、
前記リング回転量を計測するエンコーダと、
前記記憶部が記憶する撮影画角テーブルを参照して、前記エンコーダが計測したリング回転量から前記撮影カメラの画角を算出する画角算出部と、
を備えることを特徴とする請求項7に記載の位置計測装置。
【請求項9】
請求項1から請求項8の何れか一項に記載の位置計測装置と、
前記計測対象としての撮影カメラと、
を備えることを特徴とする位置計測システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2013−113642(P2013−113642A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−258422(P2011−258422)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000004352)日本放送協会 (2,206)
【出願人】(591053926)財団法人エヌエイチケイエンジニアリングサービス (169)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000004352)日本放送協会 (2,206)
【出願人】(591053926)財団法人エヌエイチケイエンジニアリングサービス (169)
【Fターム(参考)】
[ Back to top ]