
位置計測装置及び位置計測システム
【課題】本発明は、機動性に優れ、平坦でない計測基準面でも、高い精度で位置を素早く計測できる位置計測装置を提供する
【解決手段】カメラデータ計測装置1は、紐状体200の紐長変化量と紐状体の紐方向とを計測する位置センサ100と、両端が位置センサ100と撮影カメラ900とに接続された紐状体200と、紐長変化量及び紐方向に基づいて、撮影カメラ900のカメラデータを計測する演算装置300とを備え、演算装置300が、紐長初期値L0と位置センサ100で計測された紐長変化量ΔLとの和を紐方向での紐全長Lとして求め、求めた紐方向での紐全長Lを3次元方向成分に分解することで、撮影カメラ900の位置を示す3次元座標を算出する。
【解決手段】カメラデータ計測装置1は、紐状体200の紐長変化量と紐状体の紐方向とを計測する位置センサ100と、両端が位置センサ100と撮影カメラ900とに接続された紐状体200と、紐長変化量及び紐方向に基づいて、撮影カメラ900のカメラデータを計測する演算装置300とを備え、演算装置300が、紐長初期値L0と位置センサ100で計測された紐長変化量ΔLとの和を紐方向での紐全長Lとして求め、求めた紐方向での紐全長Lを3次元方向成分に分解することで、撮影カメラ900の位置を示す3次元座標を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動する計測対象に結ばれた紐状体の紐長変化量及び紐方向に基づいて、計測対象の位置データを算出する位置計測装置及び位置計測システムに関する。
【背景技術】
【0002】
番組制作や映画制作において、撮影カメラが動きながら撮影した映像に、CGや別の映像を合成することが広く行われている。この合成に際して、撮影カメラがどのように動いたか、つまり、撮影カメラの位置や姿勢を示すカメラデータが必要になる。
【0003】
従来から、カメラデータを計測する手法として、バーチャルスタジオで活用しているVR用ペデスタル(例えば、非特許文献1)や、三脚に載せて使用する構造のDGS(データ・ギャザリング・システム)が知られている。例えば、非特許文献1に記載の技術は、ロボットカメラを取り付ける雲台に特殊な細工を施すことで、ロボットカメラの動きや姿勢をカメラデータとして計測するものである。より具体的には、パン、チルト、ロール等の回転軸の回転角を検出するためのエンコーダが雲台に取り付けられており、ロボットカメラが動いたことによって変化する回転角の変化から、カメラデータを計測する。
【0004】
この他、番組制作や映画制作以外の分野でも、位置や姿勢を計測することは行われている。例えば、ゲーム機のリモコン操作器(コントローラ)は、ゲーム機本体に非接触でありながら、内蔵された加速度センサやジャイロセンサを用いて、その位置や姿勢を検出して、ゲーム操作を可能としている。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】「スタジオ番組用移動ロボットカメラの開発」、津田他、映像情報メディア学会誌、Vol.62、No.1、pp.84〜91(2008)
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、非特許文献1に記載の技術では、専用の大型装置(雲台)が必要になると共に、車輪部の構造や原点座標の設定の制約から、屋外のような平坦でない場所での使用が極めて困難である。
また、従来のDGSは、屋外で使用可能であるが、非特許文献1に記載の技術と同様、専用の大型装置を使用しなければならず、重く、機動性が悪いという欠点がある。
さらに、ゲーム機のリモコン操作器は、加速度センサやジャイロセンサに無視できないレベルの経時ドリフトやノイズが存在するため、その位置を高い精度で検出することができない。
【0007】
そこで、本発明は、機動性に優れ、平坦でない場所でも、高い精度で位置データを計測できる位置計測装置及び位置計測システムを提供することを課題とする。
【課題を解決するための手段】
【0008】
前記した課題に鑑みて、本願第1発明に係る位置計測装置は、所定の場所に配置され、移動する計測対象に結ばれた紐状体の紐長変化量と紐状体の紐方向とを計測する紐計測手段と、紐計測手段で計測された紐長変化量及び紐方向に基づいて、計測対象の位置データを算出する位置データ算出手段と、を備えることを特徴とする。
【0009】
かかる構成によれば、位置計測装置は、紐計測手段が、紐状体で一定の張力が保たれるように、計測対象に結ばれた紐状体の巻き取り及び巻き出しを行う巻取・巻出機構と、巻取・巻出機構によって張力が保たれた紐状体について、計測対象の移動に伴う紐長変化量を計測する紐長変化量計測部と、巻取・巻出機構によって張力が保たれた紐状体について、紐方向を計測する紐方向計測部と、を備える。
【0010】
また、位置計測装置は、位置データ算出手段が、予め設定された紐長初期値と紐計測手段で計測された紐長変化量との和を紐方向での紐全長として求め、求めた紐方向での紐全長を3次元方向成分に分解することで、3次元座標系で計測対象の位置データを算出す
る位置データ算出部、を備える。
【0011】
つまり、位置計測装置は、紐状体が計測対象に結ばれ、計測対象の移動に伴って紐状体が巻き取り又は巻き出しされるため、計測対象の移動距離が紐長変化量に正確に反映される。そして、位置計測装置は、専用の大型装置を必要とせず、計測対象に紐計測手段を装着する必要もない。さらに、位置計測装置は、平坦でない場所に紐計測手段を配置して、位置データを計測できる。
【0012】
また、本願第2発明に係る位置計測装置は、巻取・巻出機構が、紐状体の張力を保つ定張力ばねと、紐状体の巻き取り及び巻き出しを行うプーリと、を備え、紐長変化量計測部が、プーリの回転量を計測する回転量計測部と、予め設定されたプーリの円周に回転量計測部で計測されたプーリの回転量を乗じることで、紐長変化量を算出する紐長変化量算出部と、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、プーリの回転量が紐長変化量に比例するため、より正確な紐長変化量を算出することができる。
【0013】
また、本願第3発明に係る位置計測装置は、紐状体が、等間隔で長手方向にパターンが形成されており、紐長変化量計測部が、紐状体の巻き取り及び巻き出しに伴うパターンの反転変化を検出するパターン検出部と、パターン検出部で検出されたパターンの反転変化によって、紐長変化量を算出する紐長変化量算出部と、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、紐状体から直接、パターンの反転変化を検出するため、より正確な紐長変化量を算出することができる
【0014】
また、本願第4発明に係る位置計測装置は、計測対象に結ばれた紐状体が水平となる高さで紐計測手段を支持する支持機構に搭載されたことを特徴とする。
かかる構成によれば、位置計測装置は、計測対象に結ばれた紐状体が水平なので、この計測対象が水平から引っ張られて、高い場所や低い場所から計測対象が引っ張られることを防止できる。
【0015】
また、本願第5発明に係る位置計測装置は、紐計測手段が、所定の方位を検出する方位検出部と、紐方向計測部で計測された紐方向を、方位検出部で検出された方位を基準とした方向に変換する紐方向変換部と、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、北緯などの方位を基準として、計測対象の位置データを計測することができる。
【0016】
また、本願第6発明に係る位置計測装置は、紐状体が紐長変化量及び紐方向を伝送する信号線であり、紐計測手段が、信号線を介して、紐長変化量及び紐方向を位置データ算出手段に送信する送信部、を備え、位置データ算出手段が、計測対象に装着されると共に、信号線を介して、紐計測手段から長変化量及び紐方向を受信する受信部、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、紐長変化量及び紐方向を伝送する信号ケーブルを省略することができる。
【0017】
また、本願第7発明に係る位置計測装置は、予め設定された配置規則に従って、複数の紐計測手段が配置され、複数の紐計測手段が、それぞれ、同一の計測対象に結ばれた紐状体の紐長変化量を計測することを特徴とする。
かかる構成によれば、位置計測装置は、例えば、第1の紐計測手段を計測対象の進行方向の後方に配置し、第2の紐計測手段をその進行方向に直交する注目方向に配置するという配置規則に従って、第1,第2の紐計測手段を配置する。この場合、位置計測装置は、進行方向に対して計測対象が横ずれを起こしても、この横ずれ方向(注目方向)に第2の紐計測手段が配置されているので、この横ずれに起因する誤差を低減することができる。
【0018】
また、本願第8発明に係る位置計測装置は、位置データ算出手段が、パン方向、チルト方向及びヨー方向で計測対象の向きを示す姿勢データを計測する姿勢データ計測部、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、計測対象の位置データに加えて、姿勢データも計測することができる。
【0019】
また、本願第9発明に係る位置計測装置は、位置データ算出手段が、計測対象としての撮影カメラに装着され、位置データ算出部が、撮影カメラが撮影した撮影映像の同期信号が入力され、入力された同期信号に同期させて計測対象の位置データを算出し、姿勢データ計測部が、同期信号が入力され、入力された同期信号に同期させて計測対象の姿勢データを計測することを特徴とする。
かかる構成によれば、位置計測装置は、撮影カメラが撮影映像を撮影したタイミングに同期させて、撮影カメラの位置データ及び姿勢データをカメラデータとして計測することができる。
【0020】
また、本願第10発明に係る位置計測装置は、位置データ算出手段が、撮影カメラが備えるズームレンズのリング回転量を計測するエンコーダと、リング回転量と撮影カメラの画角とを対応付けた撮影画角テーブルが予め設定され、撮影画角テーブルを参照して、エンコーダが計測したリング回転量から撮影カメラの画角を算出する画角算出部と、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、カメラデータに撮影カメラの画角を付加することができる。
【0021】
また、本願第11発明に係る位置計測システムは、本願第1発明から本願第10発明までの何れかに係る位置計測装置と、計測対象としての撮影カメラと、を備えることを特徴とする。
【発明の効果】
【0022】
本発明によれば、以下のような優れた効果を奏する。
本願第1,11発明によれば、紐状体が計測対象に結ばれ、計測対象の移動に伴って紐状体が巻き取り又は巻き出しされるため、計測対象の移動距離が紐長変化量に正確に反映され、計測対象の位置データを高い精度で計測することができる。さらに、本願第1,11発明によれば、専用の大型装置を必要とせず、計測対象に紐計測手段を装着する必要もなく、機動性に優れる。さらに、本願第1,11発明によれば、平坦でない場所に紐計測手段を配置して、位置データを計測することができる。
【0023】
本願第2,11発明によれば、プーリの回転量が紐長変化量に比例するため、より正確な紐長変化量を算出して、計測対象の位置データをより高い精度で計測することができる。
本願第3,11発明によれば、紐状体から直接、パターンの反転変化を検出するため、正確な紐長変化量を算出して、計測対象の位置データをより高い精度で計測することができる。
本願第4,11発明によれば、計測対象が水平に引っ張られるため、高い場所や低い場所から計測対象が引っ張られることを防止して、計測対象の姿勢を安定させて、計測対象の位置データをより高い精度で計測することができる。
【0024】
本願第5,11発明によれば、北緯などの方位を基準として、計測対象の位置データを計測することができる。
本願第6,11発明によれば、紐長変化量及び紐方向を伝送する信号ケーブルを省略できるため、位置計測装置が簡易な構成となり、機動性により優れる。
本願第7,11発明によれば、位置データの計測誤差を低減することができる。
【0025】
本願第8,11発明によれば、計測対象の位置データに加えて、姿勢データも計測することができる。
本願第9,11発明によれば、撮影カメラが撮影映像を撮影したタイミングに同期させて、カメラデータを計測するため、撮影映像とカメラデータとの時間軸が一致して、映像加工処理を効率的に行うことができる。
本願第10,11発明によれば、カメラデータに撮影カメラの画角が付加されるので、映像加工処理をより効率的に行うことができる。
【図面の簡単な説明】
【0026】
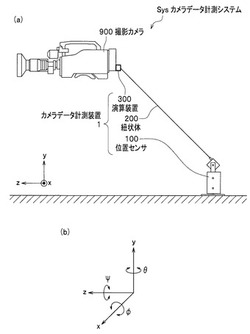
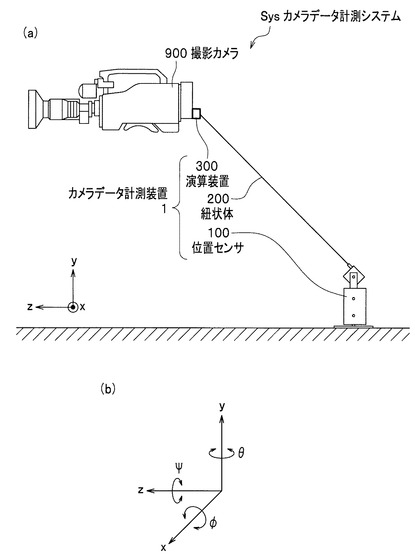
【図1】(a)は本発明の第1実施形態に係るカメラデータ計測システムの概略図であり、(b)は撮影カメラの移動方向及び回転方向を説明する説明図である。
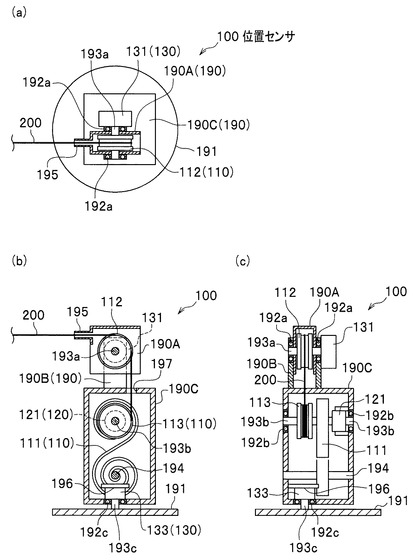
【図2】(a)は筐体上部の断面図であり、(b)及び(c)は筐体下部の断面図である。
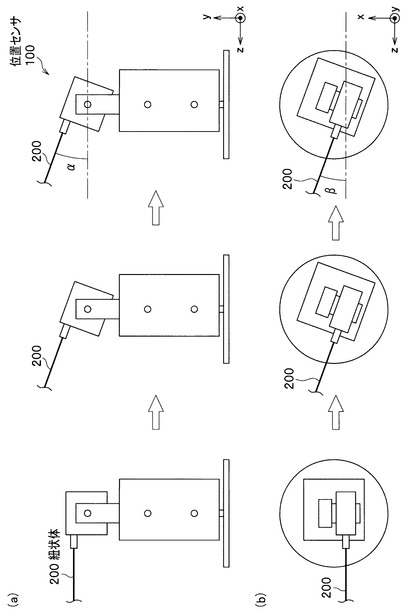
【図3】(a)は位置センサ(筐体上部)の仰角を説明する説明図であり、(b)は位置センサ(筐体下部)の旋回角を説明する説明図である。
【図4】図2の位置センサにおいて、各手段の信号入出力を図示したブロック図である。
【図5】図2の位置センサにおける計測データの伝送を説明する説明図であり、(a)は紐状体200を信号線として兼用するときの図であり、(b)は有線ネットワークを用いるときの図であり、(c)は無線ネットワークを用いるときの図である。
【図6】図1の演算装置の構造を示す図である。
【図7】図6の演算装置において、各手段の信号入出力を図示したブロック図である。
【図8】図4の位置センサの動作を示すフローチャートである。
【図9】図7の演算装置の動作を示すフローチャートである。
【図10】本発明の第2実施形態に係るカメラデータ計測装置において、フォトデテクタを説明する説明図である。
【図11】図10の位置センサにおいて、各手段の信号入出力を図示したブロック図である。
【図12】本発明の第3実施形態に係るカメラデータ計測装置において、位置センサの上面図である。
【図13】図12の位置センサにおいて、各手段の信号入出力を図示したブロック図である。
【図14】本発明の第4実施形態に係るカメラデータ計測装置の概略図である。
【図15】本発明の第5実施形態に係るカメラデータ計測装置において、演算装置に固定された支持具を説明する説明図である。
【図16】本発明の第5実施形態に係るカメラデータ計測装置において、位置センサでの信号入出力を図示したブロック図である。
【図17】本発明の第6実施形態に係るカメラデータ計測装置の概略図である。
【図18】本発明の第7実施形態において、エンコーダを説明する説明図である。
【図19】図18の演算装置において、各手段の信号入出力を図示したブロック図である。
【図20】本発明の第8実施形態に係るカメラデータ計測装置の概略図である。
【図21】図20のカメラデータ計測装置において、位置センサの配置例を説明する説明図である。
【図22】本発明の変形例1に係る位置計測装置の概略図である。
【発明を実施するための形態】
【0027】
以下、本発明の実施形態について、適宜図面を参照しながら詳細に説明する。なお、各実施形態において、同一の機能を有する手段には同一の符号を付し、説明を省略した。
【0028】
(第1実施形態)
[カメラデータ計測システムの概略]
図1を参照して、本発明の第1実施形態に係るカメラデータ計測システム(位置計測システム)Sysの概略について説明する。
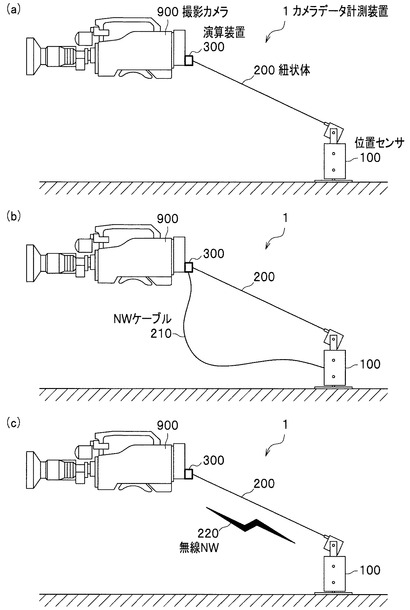
図1(a)に示すように、カメラデータ計測システムSysは、カメラデータ計測装置(位置計測装置)1と、計測対象としての撮影カメラ900とを備える。
このカメラデータ計測装置1は、位置センサ(紐計測手段)100と、紐状体200と、演算装置(位置データ算出手段)300とを備える。
【0029】
位置センサ100は、紐状体200の紐長変化量ΔLと紐方向(仰角α、旋回角β)とを計測するものである。この位置センサ100は、撮影カメラ900が移動する床や地面において、位置データの計測基準となる所定の場所に配置される。そして、位置センサ100は、計測した紐長変化量ΔL及び紐方向を演算装置300に送信する。
【0030】
紐状体200は、糸、ロープ、ワイヤ、信号ケーブル等の紐状素材である。この紐状体200は、一方の端が撮影カメラ900(正確には撮影カメラ900に装着された演算装置300)に結ばれ、他方の端が位置センサ100に接続される。そして、紐状体200は、位置センサ100の巻取・巻出機構110(図2)によって、常に張力が保たれると共に、撮影カメラ900の移動に伴って、巻き取り及び巻き出しが行われる。
【0031】
演算装置300は、位置センサ100から紐長変化量ΔL及び紐方向が入力され、この紐長変化量ΔL及び紐方向に基づいて、撮影カメラ900の位置データを計測(算出)するものである。この演算装置300は、撮影カメラ900の後部に装着、固定される。また、演算装置300は、姿勢データ計測部310(図7)によって、撮影カメラ900の姿勢データを計測し、この姿勢データと位置データとをカメラデータとして出力する。
【0032】
撮影カメラ900は、テレビ番組等の撮影映像を撮影するカメラであり、カメラマン(不図示)が肩に載せて撮影を行う一般的な肩載式のカメラである。つまり、カメラマンは、撮影カメラ900を肩に載せた状態で、床や地面を前後左右に移動しながら撮影を行う。また、カメラマンが撮影ポジションを変えるため、撮影カメラ900を上下に移動させることもある。
【0033】
この場合、撮影カメラ900の位置が変わることによって、撮影カメラ900の方向や紐長が変化する。つまり、紐状体200の紐方向は、位置センサ100を基準とした、撮影カメラ900の方向を示すことになる。さらに、紐状体200の紐長変化量ΔLは、撮影カメラ900が移動した距離を示すことになる。従って、カメラデータ計測装置1は、この紐長変化量ΔL及び紐方向に基づいて、撮影カメラ900の位置データを計測することができる。
【0034】
図1(b)に示すように、x軸を左右方向とし、y軸を上下方向とし、z軸を前後方向とする。また、y軸が回転軸となる回転方向θをパン方向とし、x軸が回転軸となる回転方向φをチルト方向とし、z軸が回転軸となる回転方向Ψをヨー方向とする。
【0035】
[位置センサ]
<位置センサの構造>
図2を参照して、位置センサ100の構造を説明した後、図4を参照して、位置センサ100の信号処理を説明する。
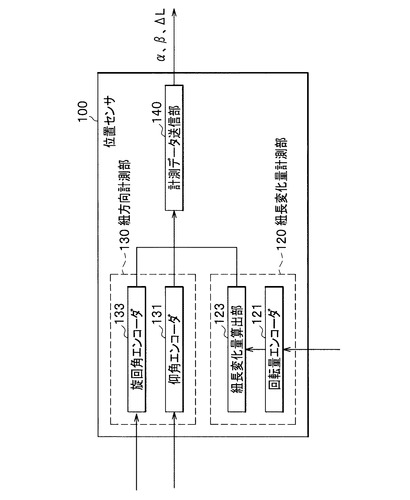
図2に示すように、位置センサ100は、巻取・巻出機構110と、紐長変化量計測部120と、紐方向計測部130と、計測データ送信部(送信部)140とを備える。
なお、図2では、紐長変化量算出部123及び計測データ送信部140を省略した。
【0036】
位置センサ100は、筐体190の内部にほとんどの手段が収納されている。
この筐体190は、仰角方向(チルト方向)に回転可能な筐体上部190Aと、筐体上部190A及び筐体下部190Cを連結する連結部190Bと、旋回方向(パン方向)に回転可能な筐体下部190Cとで構成される。
【0037】
筐体上部190Aは、連結部190Bに挟み込まれるように、仰角方向に回転自在に支持される。また、筐体上部190Aは、紐状体200を出し入れするために、側方に突出したノズル195と、底面に貫通孔197とが形成される。
連結部190Bは、対向した2枚の平板部材が、筐体下部190Cの天面外側に固定されたものである。また、連結部190Bは、軸受192aを同軸に形成し、この軸受192aに挿入された軸193aにより、筐体上部190Aを支持する。
【0038】
筐体下部190Cは、側面上部に軸受192bが同軸で形成され、この軸受192bに軸193bが挿入される。
また、筐体下部190Cは、底面に軸受192cが形成され、この軸受192cに軸193cが挿入される。この軸193cは、下端部の軸径を広くして、ベース191に接続される。このようにして、筐体下部190Cは、軸193cにより、旋回方向に回転自在に支持される。
さらに、筐体下部190Cは、この軸193bと平行になるように、側面下部に支持棒194が形成される。
ベース191は、位置センサ100を配置するときに、床や地面に接する土台部分である。
【0039】
巻取・巻出機構110は、紐状体200で一定の張力が保たれるように、紐状体200の巻き取り及び巻き出しを行うものであり、定張力ばね111と、第1プーリ112と、第2プーリ113とを備える。
定張力ばね111は、筐体下部190Cに収納され、両端が軸193cと支持棒194とにそれぞれ接続される。また、定張力ばね111は、軸193cを介して、第2プーリ113を巻き取り方向に回転させようとする。このようにして、紐状体200は、一定の張力が保たれる。
【0040】
第1プーリ112は、筐体上部190Aに収納され、軸193aによって仰角方向に回転自在に支持される。また、第1プーリ112は、貫通孔197から垂直に引き込まれる紐状体200を、ノズル195から引き出されるように誘導する。
第2プーリ113は、筐体下部190Cに収納され、第1プーリ112と上下で並ぶように軸193bに支持される。ここで、第2プーリ113は、紐長変化量ΔLの計算誤差を低減するため、紐状体200を1重巻きにすることが好ましい。
このようにして、紐状体200は、第1プーリ112を介して、第2プーリ113に巻き取り、巻き出しされる。
【0041】
紐長変化量計測部120は、巻取・巻出機構110によって張力が保たれた紐状体200について、撮影カメラ900の移動に伴う紐長変化量ΔLを計測するものであり、回転量エンコーダ(回転量計測部)121と、紐長変化量算出部123とを備える。
回転量エンコーダ121は、筐体下部190Cに収納され、第2プーリ113と同軸で軸193bに支持される。そして、回転量エンコーダ121は、軸193bを介して、第2プーリ113の回転量(回転角)ωを計測する。この回転量ωは、例えば、第2プーリ113が巻き出し方向に回転していれば正(+)の値となり、巻き取り方向に回転していれば負(−)の値となる。
なお、紐長変化量算出部123の詳細は、後記する。
【0042】
紐方向計測部130は、巻取・巻出機構110によって張力が保たれた紐状体200について紐方向を計測するものであり、仰角エンコーダ131と、旋回角エンコーダ133とを備える。
仰角エンコーダ131は、第1プーリ112と同軸で連結部190Bに固定され、軸193aの一端が接続される。そして、仰角エンコーダ131は、軸193aを介して、位置センサ100(筐体上部190A)の仰角αを紐方向として計測する。
旋回角エンコーダ133は、筐体下部190Cの下部内側に突出した固定板196に下向きで固定され、軸193cの一端が接続される。そして、旋回角エンコーダ133は、軸193cを介して、位置センサ100(筐体下部190C)の旋回角βを紐方向として計測する。
【0043】
ここで、図3を参照して、紐方向について説明する。
例えば、図3(a)に示すように、撮影カメラ900が低い位置にあり、紐状体200が水平であったとする(仰角α=0°)。そして、撮影カメラ900が高い位置に移動すると、撮影カメラ900が紐状体200をy軸方向に引っ張ることで、筐体上部190Aは、紐状体200と同じ向きになるまで仰角方向に回転する。このとき、仰角エンコーダ131は、水平面に対する筐体上部190Aの仰角αを、紐方向として計測する。つまり、仰角αは、設置面(床や地面)に対する紐状体200のチルト角である。
【0044】
例えば、図3(b)に示すように、撮影カメラ900が正面を向いており、紐状体200がz軸に平行であったとする(旋回角β=0°)。そして、撮影カメラ900が左右に移動すると、撮影カメラ900が紐状体200をx軸方向に引っ張ることで、筐体下部190Cは、紐状体200と同じ向きになるまで旋回方向に回転する。このとき、旋回角エンコーダ133は、前後方向に対する筐体下部190Cの旋回角βを、紐方向として計測する。つまり、旋回角βは、前後方向(z軸)に対する紐状体200のパン角である。
【0045】
<位置センサの信号処理>
図4を参照して、位置センサ100の信号処理について説明する(適宜図1,図2参照)。
なお、図4では、信号を入出力しない巻取・巻出機構110等の一部手段を省略した。
【0046】
紐長変化量算出部123は、回転量エンコーダ121で計測された第2プーリ113の回転量ωが入力される。そして、紐長変化量算出部123は、下記の式(1)に示すように、予め設定された第2プーリ113の円周2πrに、入力された第2プーリ113の回転量ωを乗じることで、紐状体200の紐長変化量ΔLを算出する。その後、紐長変化量算出部123は、算出した紐長変化量ΔLを計測データ送信部140に出力する。
ΔL=2πr×ω ・・・式(1)
なお、rは第2プーリ113の半径であり、πは円周率である。
【0047】
前記したように、第2プーリ113が紐状体200を1重巻きしているため、紐状体200の重なりに伴って、円周が増大することがない。従って、紐長変化量算出部123は、高い精度で紐長変化量ΔLを算出することができる。
【0048】
紐方向計測部130は、仰角エンコーダ131で計測された紐方向(仰角α)と、旋回角エンコーダ133で計測された紐方向(旋回角β)とを、計測データ送信部140に出力する。
【0049】
計測データ送信部140は、紐長変化量計測部120から紐長変化量ΔLが入力され、紐方向計測部130から紐方向(仰角α及び旋回角β)が入力される。そして、計測データ送信部140は、入力された紐長変化量ΔLと、仰角αと、旋回角βとを計測データとして、演算装置300に送信するものである。この計測データ送信部140は、一般的なネットワークインタフェースで実現できるため、詳細な説明を省略する。
【0050】
ここで、計測データの伝送方法について、3つの具体例を説明する。
図5(a)に示すように、カメラデータ計測装置1は、紐状体200を、計測データを伝送する信号線と兼用してもよい。つまり、計測データ送信部140は、紐状体200を介して、計測データを演算装置300に送信する。この手法によれば、カメラデータ計測装置1は、計測データを伝送するための信号ケーブルを省略できるので、カメラデータ計測装置1が簡易な構成となり、撮影時の機動性により優れる。
【0051】
また、図5(b)に示すように、カメラデータ計測装置1は、有線ネットワークによって計測データを伝送してもよい。つまり、計測データ送信部140は、NWケーブル210を介して、計測データを演算装置300に送信する。
さらに、図5(c)に示すように、計測データ送信部140は、無線ネットワーク(無線NW)220によって、計測データを演算装置300に送信してもよい。
【0052】
なお、図5(a)のように、紐状体200を信号線として兼用する場合、カメラデータ計測装置1は、紐状体200を演算装置300に結ぶ必要がある。この場合、撮影カメラ900が移動すると、この撮影カメラ900に演算装置300が固定されているので、演算装置300が、撮影カメラ900と同じ距離だけ移動する。従って、カメラデータ計測装置1は、紐状体200を演算装置300又は撮影カメラ900の何れに結んでも紐長変化量ΔLが同じ値になり、正確な計測データを得ることができる。
すなわち、請求項に記載の「計測対象に結ばれた紐状体」とは、撮影カメラ900に結ばれた紐状体200、又は、この撮影カメラ900に固定された演算装置300に結ばれた紐状体200の意味である。
【0053】
[演算装置の構成]
図6,図7を参照して、図1の演算装置300の構成について説明する。
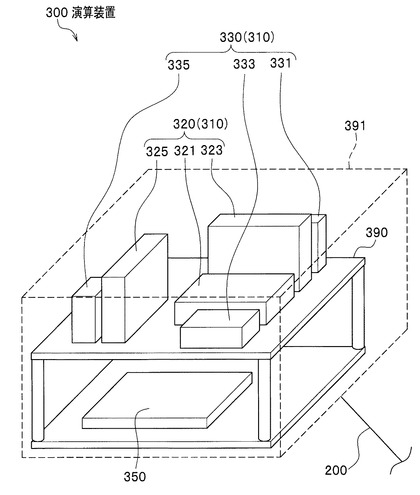
図6に示すように、演算装置300は、ジャイロセンサ320と、加速度センサ330と、計測データ受信部340(受信部、図7)と、CPU(Central Processing Unit)350とを備える。
【0054】
演算装置300は、基板390の上段にジャイロセンサ320と加速度センサ330とが配置され、基板390の下段にCPU350が配置される。また、演算装置300は、ジャイロセンサ320及び加速度センサ330とCPU350との間で信号を入出力できるように、図示を省略した回路が形成される。そして、演算装置300は、前記した各手段が配置された基板390を、箱型の筐体391に収納する。
【0055】
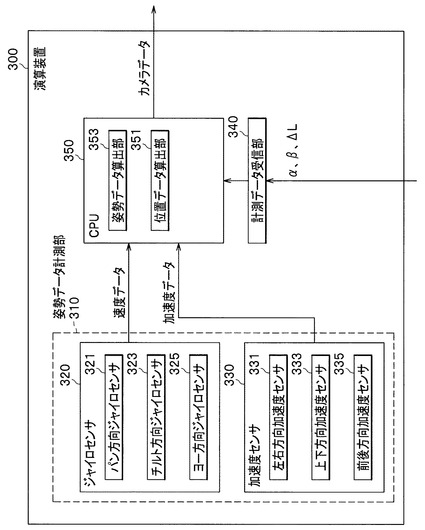
図7に示すように、姿勢データ計測部310は、パン方向、チルト方向及びヨー方向で撮影カメラ900の向きを示す姿勢データを計測するものであり、ジャイロセンサ320と、加速度センサ330とで構成される。
ジャイロセンサ320は、パン方向ジャイロセンサ321と、チルト方向ジャイロセンサ323と、ヨー方向ジャイロセンサ325とで構成される。
パン方向ジャイロセンサ321は、演算装置300及びこの演算装置300が装着された撮影カメラ900について、パン方向の角速度を計測するものである。
チルト方向ジャイロセンサ323は、演算装置300及び撮影カメラ900について、チルト方向の角速度を計測するものである。
ヨー方向ジャイロセンサ325は、演算装置300及び撮影カメラ900について、ヨー方向の角速度を計測するものである。
そして、ジャイロセンサ320は、計測したパン方向、チルト方向及びヨー方向の角速度を速度データとしてCPU350に出力する。
【0056】
加速度センサ330は、左右方向加速度センサ331と、上下方向加速度センサ333と、前後方向加速度センサ335とで構成される。
左右方向加速度センサ331は、演算装置300及びこの演算装置300が装着された撮影カメラ900について、左右方向(x軸方向)の加速度を計測するものである。
上下方向加速度センサ333は、演算装置300及び撮影カメラ900について、上下方向(y軸方向)の加速度を計測するものである。
前後方向加速度センサ335は、演算装置300及び撮影カメラ900について、前後方向(z軸方向)の加速度を計測するものである。
そして、加速度センサ330は、計測した左右方向、上下方向及び前後方向の加速度を加速度データとしてCPU350に出力する。
【0057】
なお、ジャイロセンサ320及び加速度センサ330は、一般的なMEMS(Micro Electro Mechanical Systems)慣性センサを利用できるため、詳細な説明を省略する。このMEMS慣性センサは、コンパクトに集積可能であり、演算装置300の小型化に寄与する。
【0058】
計測データ受信部340は、位置センサ100から、紐長変化量ΔLと、仰角αと、旋回角βとを計測データとして受信するものである。ここで、計測データ受信部340は、図4の計測データ送信部140と同様の手法で、計測データを受信する。そして、計測データ受信部340は、受信した計測データをCPU350に出力する。この計測データ受信部340は、一般的なネットワークインタフェースで実現できるため、詳細な説明を省略する。
【0059】
CPU350は、演算装置300での各種演算を行うものであり、位置データ算出部351と、姿勢データ算出部353とを備える。ここで、CPU350は、ジャイロセンサ320から速度データが入力され、加速度センサ330から加速度データが入力され、計測データ受信部340から計測データが入力される。
【0060】
位置データ算出部351は、撮影カメラ900の位置データを算出するものである。ここで、紐状体200の紐全長Lとすると、3次元座標系での撮影カメラ900の位置データ(Px,Py,Pz)は、下記の式(2)で計算することができる。
(Px,Py,Pz)=(L・cosα・sinβ,L・sinα,
L・cosα・cosβ) ・・・式(2)
【0061】
すなわち、位置データ算出部351は、予め設定された紐長初期値L0と、紐長変化量ΔLとの和を紐方向での紐全長Lとして求める。そして、位置データ算出部351は、式(2)に示すように、紐方向での紐全長Lを3次元方向成分に分解することで、位置データ(Px,Py,Pz)を算出する。
【0062】
ここで、撮影カメラ900と位置センサ100との距離が、例えば、1メートル離れた状態(つまり、紐状体200の一部が巻き出された状態)で、位置データの計測を開始することがある。この場合、位置データ算出部351は、位置データの計測開始時点において、巻き出されていた紐状体200の紐長である紐長初期値L0を、予め設定する。
【0063】
姿勢データ算出部353は、ジャイロセンサ320からの速度データと加速度センサ330からの加速度データとから、撮影カメラ900の向きを示す姿勢データを算出するものである。ここで、加速度データにより撮影カメラ900がどちらの方向に移動しようとしたか分かる。従って、姿勢データ算出部353は、例えば、加速度センサ330からの加速度データに、ジャイロセンサ320からの速度データに相乗しているクロストーク分を補正して積分処理を行う。このようにして、姿勢データ算出部353は、パン方向、チルト方向及びヨー方向について、撮影カメラ900の姿勢データ(Pθ,Pφ,PΨ)を算出する。
【0064】
その後、CPU350は、位置データ算出部351が算出した位置データと、姿勢データ算出部353が算出した姿勢データとを、カメラデータとして出力する。
なお、速度データ及び加速度データから姿勢データを算出する方法は、MEMS慣性センサの実装に依存する一般的な処理のため、詳細な説明を省略する。
【0065】
[位置センサの動作]
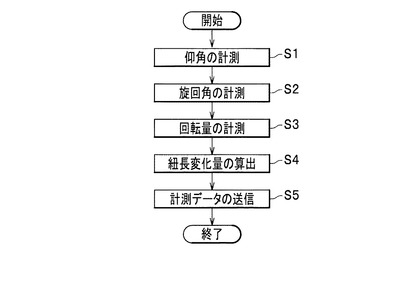
図8を参照して、図4の位置センサ100の動作について説明する(適宜図4参照)。
位置センサ100は、仰角エンコーダ131によって、位置センサ100(筐体上部190A)の仰角αを紐方向として計測する(ステップS1)。
【0066】
位置センサ100は、旋回角エンコーダ133によって、位置センサ100(筐体下部190C)の旋回角βを紐方向として計測する(ステップS2)。
位置センサ100は、回転量エンコーダ121によって、第2プーリ113の回転量ωを計測する(ステップS3)。
【0067】
位置センサ100は、紐長変化量算出部123によって、前記した式(1)に示すように、第2プーリ113の円周にその回転量ωを乗じることで、紐長変化量ΔLを算出する(ステップS4)。
【0068】
位置センサ100は、計測データ送信部140によって、紐長変化量ΔLと、仰角αと、旋回角βとを計測データとして、演算装置300に送信する。つまり、計測データ送信部140は、信号線としての紐状体200、有線ネットワーク、又は、無線ネットワークの何れかによって、計測データを送信する(ステップS5)。
【0069】
[演算装置の動作]
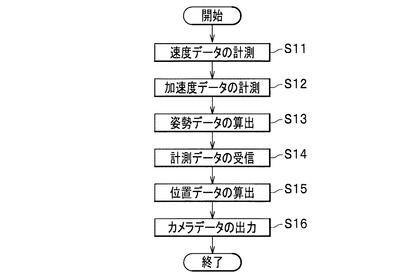
図9を参照して、図7の演算装置300の動作について説明する(適宜図7参照)。
演算装置300は、ジャイロセンサ320によって、速度データを計測する(ステップS11)。
【0070】
演算装置300は、加速度センサ330によって、加速度データを計測する(ステップS12)。
演算装置300は、姿勢データ算出部353によって、速度データ及び加速度データから姿勢データを算出する(ステップS13)。
【0071】
演算装置300は、計測データ受信部340によって、位置センサ100から、紐長変化量ΔLと、仰角αと、旋回角βとを計測データとして受信する。つまり、計測データ受信部340は、図4の計測データ送信部140と同様の手法で、計測データを受信する(ステップS14)。
【0072】
演算装置300は、位置データ算出部351によって、撮影カメラ900の位置データを算出する。つまり、位置データ算出部351は、紐長初期値L0と紐長変化量ΔLとの和を紐方向での紐全長Lとして求める。そして、位置データ算出部351は、前記した式(2)に示すように、紐方向での紐全長Lを3次元方向成分に分解することで、3次元座標系で撮影カメラ900の位置データを算出する(ステップS15)。
演算装置300は、CPU350によって、撮影カメラ900の位置データと姿勢データとを、カメラデータとして出力する(ステップS16)。
【0073】
以上のように、本発明の第1実施形態に係るカメラデータ計測装置1は、紐状体200が撮影カメラ900に結ばれ、撮影カメラ900の移動に伴って紐状体200が巻き取り又は巻き出しされるため、撮影カメラ900の移動距離が紐長変化量ΔLに正確に反映され、撮影カメラ900のカメラデータを高い精度で計測することができる。さらに、カメラデータ計測装置1は、専用の大型装置を必要とせず、撮影カメラ900に位置センサ100を装着する必要もなく、撮影カメラ900の重量増加を最小限に抑えてられるため、撮影時の機動性に優れる。さらに、カメラデータ計測装置1は、床や地面が平坦でない場所にも位置センサ100を配置できるため、平坦でない場所でもカメラデータを計測することができる。
【0074】
そして、このカメラデータを用いれば、撮影映像にCGや他の映像を合成する、撮影映像の一部に追随して映像効果を加える等の映像加工処理が可能になり、映像表現の幅を拡大することができる。これによって、カメラデータ計測装置1のユーザは、映画のような大スペクタクルな映像をテレビ番組として容易に制作できるようになり、迫力があって分かり易い映像を視聴者に提供することができる。
【0075】
さらに、個人情報保護の観点からニュース番組等において、映像の一部にぼかしを加えて人物等の判別を困難にする映像加工処理を施す機会も増加している。このような場合、カメラデータ計測装置1のユーザは、その映像加工処理を効率的に行うことができる。
【0076】
なお、第1実施形態では、撮影カメラ900の姿勢データを計測するため、位置センサ100と演算装置300とを独立させたが、本発明は、これに限定されない。例えば、この姿勢データを計測しない場合、位置センサ100が位置データ算出部351を内蔵してもよい。
【0077】
(第2実施形態)
[位置センサの構成]
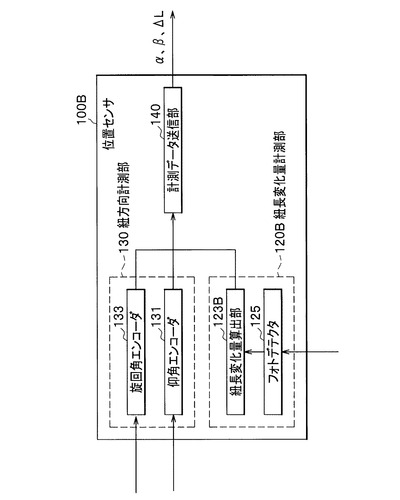
図10,図11を参照して、本発明の第2実施形態に係るカメラデータ計測装置1Bについて、第1実施形態と異なる点を説明する。
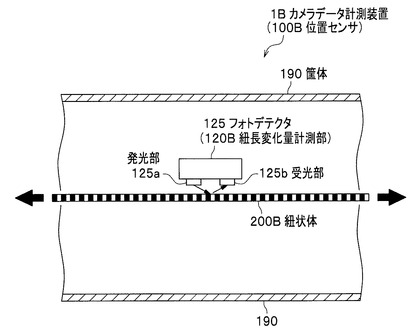
カメラデータ計測装置1Bは、位置センサ100Bにおいて、回転量エンコーダ121の代わりにフォトデテクタ(パターン検出部)125を備える点と、紐長変化量算出部123Bで紐長変化量ΔLを求める手法とが第1実施形態と異なる。
なお、図10では、巻き出し方向及び巻き取り方向をブロック矢印で図示した。
【0078】
図10に示すように、紐状体200Bは、その外表面に長手方向(巻き出し方向、巻き取り方向)で、白色、黒色が交互する縞模様が模様パターンとして印刷されている。
紐長変化量計測部120B(図11)は、後記する紐長変化量算出部123Bと、フォトデテクタ125とを備える。
フォトデテクタ125は、紐状体200Bの巻き取り、巻き出しに伴う模様パターンの反転変化を検出するものである。例えば、フォトデテクタ125は、発光部125aから検出光を紐状体200Bに向けて照射し、紐状体200Bで反射された検出光を受光部125bで受光する反射型のフォトデテクタである。このフォトデテクタ125は、検出光の照射及び反射が可能であれば、筐体190内部の任意場所に配置できる。
【0079】
ここで、紐状体200Bは、例えば、模様パターンが白色のときに検出光を反射し、黒色のときに検出光を反射しないというように、検出光の照射点における模様パターンに応じて、検出光を反射するか否かが異なる。そして、紐状体200Bが巻き取り、巻き出しされる状況では、検出光の照射点において、模様パターンで白色、黒色が反転変化する。言い換えるなら、検出光の照射点において、模様パターンの反転変化が、紐状体200Bが巻き取り、巻き出しされる状況を表す。従って、フォトデテクタ125は、検出光の有無により模様パターンでの色の反転変化を検出して、紐長変化量算出部123Bに出力する。
【0080】
図11の紐長変化量算出部123Bは、フォトデテクタ125から模様パターンの反転変化が入力され、この模様パターンの反転変化によって紐長変化量ΔLを算出するものである。例えば、紐長変化量算出部123Bは、紐状体200Bの模様パターンの間隔が予め設定される。そして、紐長変化量算出部123Bは、この模様パターンの間隔と、フォトデテクタ125で検出された模様パターンの反転変化の回数とから、紐状体200Bが巻き取り、巻き出しされた長さが分かるので、紐長変化量ΔLを算出できる。
【0081】
ここで、フォトデテクタ125単体では、紐状体200Bが巻き取り又は巻き出しされているのかを判定することができない。そこで、カメラデータ計測装置1Bは、例えば、第2プーリ113の回転方向を検出する回転方向センサ(不図示)を備える。そして、紐長変化量算出部123Bは、この回転方向センサによって、紐状体200Bが巻き取り又は巻き出しされているかを判定する。その後、紐長変化量算出部123Bは、紐状体200Bが巻き出しされていれば紐長変化量ΔLを正(+)の値とし、紐状体200Bが巻き取りされていれば紐長変化量ΔLを負(−)の値として、計測データ送信部140に出力する。
【0082】
以上のように、本発明の第2実施形態に係るカメラデータ計測装置1Bは、位置センサ100Bが、紐状体200Bから直接、模様パターンの反転変化を検出するため、正確に紐長変化量ΔLを算出して、カメラデータをより高い精度で計測することができる。
【0083】
なお、第2実施形態では、紐状体200Bに模様パターンを印刷し、フォトデテクタ125で模様パターンの反転変化を検出することとしたが、本発明は、これに限定されない。例えば、本発明は、磁性体である紐状体200に磁気パターンを記録し、この磁気パターンの反転変化をマグネティックセンサで検出できる。
【0084】
なお、第2実施形態において、位置センサ100Bの動作は、紐長変化量算出部123Bでの紐長変化量ΔLを求める手法以外、図8と同様のため、詳細な説明を省略した。
以後の実施形態においても、第2実施形態と同様、動作の説明を省略する。
【0085】
(第3実施形態)
[位置センサの構成]
図12,図13を参照して、本発明の第3実施形態に係るカメラデータ計測装置1Cについて、第1実施形態と異なる点を説明する。
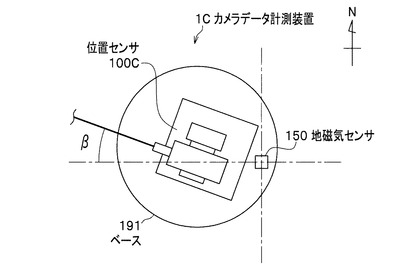
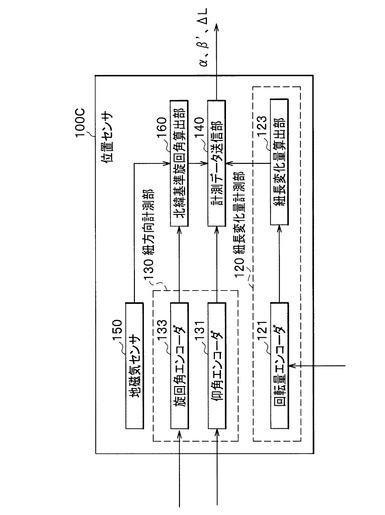
カメラデータ計測装置1Cは、位置センサ100Cが、地磁気センサ(方位検出部)150と北緯基準旋回角算出部160とを備える点が第1実施形態と異なる。
【0086】
地磁気センサ150は、北緯を検出するものである。図12に示すように、地磁気センサ150は、位置センサ100Cが旋回しても地磁気センサ150の向きが変わらないように、ベース191の周縁部に固定されている。そして、地磁気センサ150は、検出した北緯情報を、北緯基準旋回角算出部(紐方向変換部)160に出力する。
【0087】
北緯基準旋回角算出部160は、地磁気センサ150から北緯情報が入力され、旋回角エンコーダ133で計測された紐方向(旋回角β)を、北緯を基準とした北緯基準旋回角β´に変換するものである。そして、北緯基準旋回角算出部160は、変換した北緯基準旋回角β´を計測データ送信部140に出力する。
【0088】
以上のように、本発明の第3実施形態に係るカメラデータ計測装置1Cは、紐方向(旋回角β)を、北緯を基準とした絶対座標系で表すことができる。これによって、カメラデータ計測装置1Cは、位置センサ100Cから見て、撮影カメラ900が東西南北どの方位にあるかを、ユーザに即座に提示することができる。
【0089】
第3実施形態では、位置センサ100Cの旋回角が0°となる初期方位β0を予め設定しておき、初期方位β0と北緯基準旋回角β´との差分を式(2)のβに代入すれば、北緯基準旋回角β´から位置データを求めることができる。
【0090】
(第4実施形態)
[カメラデータ計測装置の構成]
図14を参照して、本発明の第4実施形態に係るカメラデータ計測装置1Dについて、第1実施形態と異なる点を説明する。
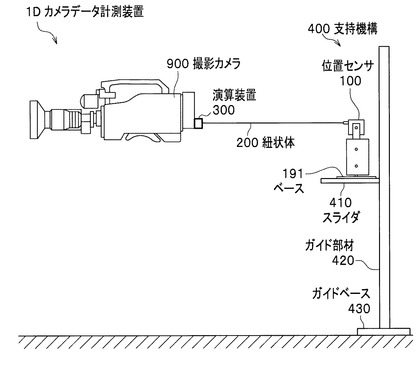
カメラデータ計測装置1Dは、位置センサ100が支持機構400に搭載された点が第1実施形態と異なる。
【0091】
図14に示すように、カメラデータ計測装置1Dは、位置センサ100と、紐状体200と、演算装置300と、支持機構400とを備える。
支持機構400は、スライダ410と、ガイド部材420と、ガイドベース430とを備える。
スライダ410は、位置センサ100を搭載する平板部材であり、ガイド部材420に取り付けられる。また、スライダ410は、ガイド部材420に沿って高さを調整できると共に、所望の高さでガイド部材420に固定できる。
ガイド部材420は、垂直に伸びた棒状部材であり、下端部がガイドベース430に接続される。
ガイドベース430は、床や地面に接する土台部分である。
【0092】
例えば、撮影時、撮影カメラ900に結ばれた紐状体200が水平となるように、位置センサ100が搭載された状態で、スライダ410を上下させる。そして、スライダ410は、紐状体200が水平となる状態で、ガイド部材420に手動で固定される。
【0093】
以上のように、本発明の第4実施形態に係るカメラデータ計測装置1Dは、撮影カメラ900が水平に引っ張られるため、撮影カメラ900が高い場所や低い場所から引っ張られることを防止できる。従って、カメラデータ計測装置1Dは、撮影カメラ900の姿勢を安定させて、カメラデータをより高い精度で計測することができる。さらに、カメラデータ計測装置1Dは、カメラマンに対して、高い場所や低い場所から引っ張られる感覚を減少させることができる。
【0094】
(第5実施形態)
[演算装置の構成]
図15,図16を参照して、本発明の第5実施形態に係るカメラデータ計測装置1Eについて、第1実施形態と異なる点を説明する。
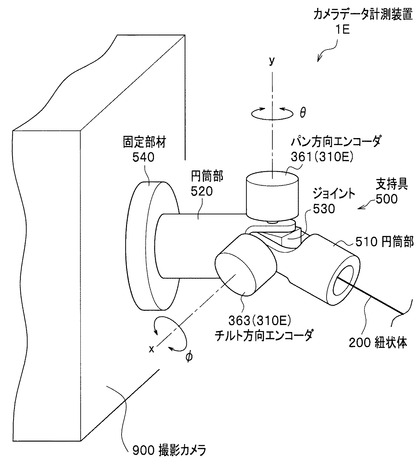
カメラデータ計測装置1Eは、撮影カメラ900に固定された支持具500の可動方向によって姿勢データを求める点が第1実施形態と異なる。
【0095】
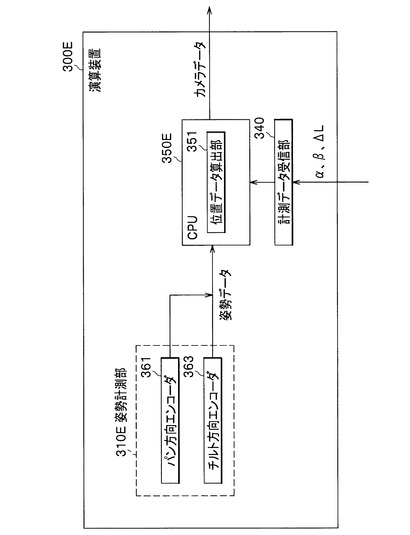
図15に示すように、姿勢データ計測部310は、パン方向エンコーダ361と、チルト方向エンコーダ363とを備える。
パン方向エンコーダ361は、後記する円筒部520の挟持部に固定され、後記するパン方向軸(不図示)の一端が接続される。そして、パン方向エンコーダ361は、このパン方向軸を介して、支持具500(ジョイント530)のパン方向の回転角を計測する。
チルト方向エンコーダ363は、後記する円筒部510の挟持部に固定され、後記するチルト方向軸(不図示)の一端が接続される。そして、チルト方向エンコーダ363は、このチルト方向軸を介して、支持具500(ジョイント530)のチルト方向の回転角を計測する。
【0096】
支持具500は、円筒部510,520と、ジョイント530と、固定部材540とを備える。
円筒部510は、一方の側が円筒状になっており、紐状体200を円筒内部まで引き込んで固定する。また、円筒部510は、他方の側に、正方形状のジョイント530を左右から挟むように、2つに分かれて延伸された挟持部が形成される。
される。
円筒部520は、一方の側に、ジョイント530を上下から挟むように、2つに分かれて延伸された挟持部が形成される。また、円筒部520は、他方の側が固定部材540に接続される。
ジョイント530は、正方形状であって、円筒部510の挟持部をx軸方向に貫通するチルト方向軸と、円筒部520の挟持部をy軸方向に貫通するパン方向軸とが形成される。そして、ジョイント530は、チルト方向軸及びパン方向軸を介して、円筒部510,520を結合する。
固定部材540は、撮影カメラ900の後部に固定される部材である。
【0097】
このようにして、支持具500は、撮影カメラ900がパン方向及びチルト方向に向き(姿勢)を変えると、紐状体200に対してジョイント530の角度が変化する。このとき、姿勢データ計測部310は、パン方向の回転角とチルト方向の回転角とを計測して、姿勢データとして、CPU350Eに出力する。
【0098】
図16のCPU350Eは、姿勢データ計測部310から姿勢データが入力され、計測データ受信部340から計測データが入力される。そして、CPU350Eは、位置データ算出部351が位置データを算出し、この位置データと姿勢データとを、カメラデータとして出力する。
【0099】
以上のように、本発明の第5実施形態に係るカメラデータ計測装置1Eは、演算装置300Eが、姿勢データ計測部310で計測されたパン方向の回転角とチルト方向の回転角とを、そのまま姿勢データとして出力する。このため、カメラデータ計測装置1Eは、演算装置300Eで姿勢データを算出する必要がなく、演算処理量を低減することができる。
【0100】
なお、第5実施形態では、撮影カメラ900をヨー方向に故意に回転させて撮影することが少ないため、ヨー方向の姿勢を考慮していない。しかし、本発明は、支持具500をヨー方向にも可動する構造とし、ヨー方向の回転角を計測するヨー方向エンコーダを支持具500に固定することで、ヨー方向の姿勢も計測することができる。
【0101】
(第6実施形態)
[カメラデータ計測装置の構成]
図17を参照して、本発明の第6実施形態に係るカメラデータ計測装置1Fの構成について、第1実施形態と異なる点を説明する。
【0102】
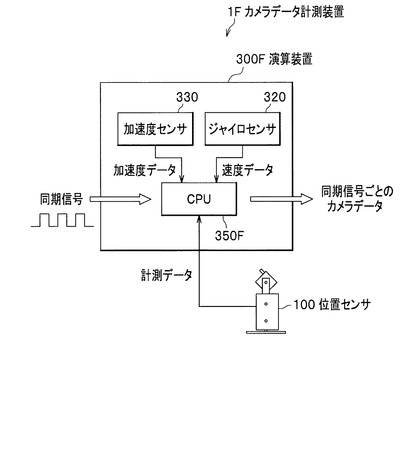
カメラデータは、主に、撮影映像の合成に利用されるものである。このため、撮影映像を構成する1枚1枚のフレーム画像ごとに、カメラデータが必要となる。その一方、位置センサ100、ジャイロセンサ320及び加速度センサ330は、撮影映像の合成を意識したものでなく、計測データ、速度データ及び加速度データの計測タイミングが、各フレーム画像に同期していないことが多い。そこで、カメラデータ計測装置1Fは、映像加工処理を確実に行うため、撮影映像の同期信号(垂直同期信号)ごとに、カメラデータを計測する。
【0103】
具体的には、カメラデータ計測装置1Fは、図17に示すように、撮影カメラ900から同期信号が入力される。そして、CPU350Fは、位置センサ100からの計測データと、ジャイロセンサ320からの速度データと、加速度センサ330からの加速度データとを、同期信号が入力されたタイミングでサンプリングする。そして、CPU350Fは、サンプリングした計測データと速度データと加速度データとを用いて、同期信号ごとにカメラデータを計測する。
なお、同期信号を用いる以外、カメラデータ計測装置1Fの各手段は、図4,図7と同様のため、詳細な説明を省略する。
【0104】
以上のように、本発明の第6実施形態に係るカメラデータ計測装置1Fは、計測したカメラデータが各フレーム画像に同期するため、映像加工処理を効率的に行うことができる。
【0105】
なお、第6実施形態では、同期信号ごとにカメラデータを計測する例で説明したが、本発明は、これに限定されない。例えば、カメラデータ計測装置1Fは、位置センサ100、ジャイロセンサ320及び加速度センサ330の計測周波数を、撮影映像の同期信号よりも十分に速い周波数とする。そして、カメラデータ計測装置1Fは、この計測周波数でカメラデータを計測し、各フレーム画像の撮影時間に一致するカメラデータ、又は、この撮影時間に最も近いカメラデータを出力してもよい。
【0106】
(第7実施形態)
[カメラデータ計測装置の構成]
図18,図19を参照して、本発明の第7実施形態に係るカメラデータ計測装置1Gの構成について、第1実施形態と異なる点を説明する。
カメラデータ計測装置1Gは、撮影カメラ900の撮影画角を算出して、カメラデータに付加する点が、第1実施形態と大きく異なる。
【0107】
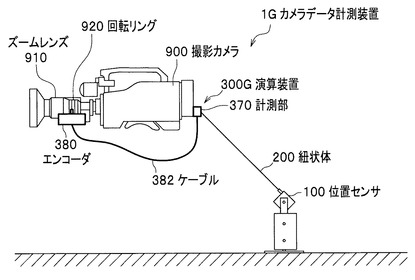
図18に示すように、撮影カメラ900は、回転リング920を回転させることで、撮影画角を変更可能なズームレンズ910を備える。この撮影カメラ900は、回転リング920にエンコーダ380が取り付けられている。
【0108】
エンコーダ380は、回転リング920のリング回転量を計測するものである。このエンコーダ380は、ケーブル382を介して計測部370に接続されており、計測したリング回転量を計測部370(図19のCPU350G)に出力する。
【0109】
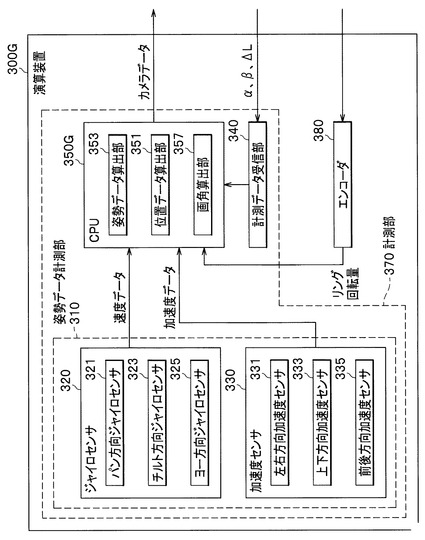
図19に示すように、演算装置300Gは、図4の演算装置300に画角算出部357とエンコーダ380とを追加したものである。
CPU350Gは、位置データ算出部351と、姿勢データ算出部353と、画角算出部357とを備える。ここで、CPU350Gは、速度データと、加速度データと、計測データとに加え、エンコーダ380からリング回転量が入力される。
【0110】
画角算出部357は、リング回転量と、撮影カメラ900の撮影画角とを対応付けた撮影画角テーブルが予め設定され、この撮影画角テーブルを参照して、CPU350Gに入力されたリング回転量から撮影カメラ900の撮影画角を算出するものである。言い換えるなら、画角算出部357は、入力されたリング回転量に対応付けられた撮影カメラ900の撮影画角を、撮影画角テーブルから読み出すことになる。
【0111】
その後、CPU350Gは、画角算出部357が算出した撮影画角を、カメラデータに付加して出力する。
以上のように、本発明の第7実施形態に係るカメラデータ計測装置1Gは、位置データ及び姿勢データに加えて、撮影画角もカメラデータとして計測することができる。
【0112】
なお、第7実施形態において、カメラデータの精度をさらに高くしたい場合、撮影カメラ900のフォーカスリングにもエンコーダを取り付けて、焦点位置による画角の変化を反映させてもよい。
【0113】
なお、第7実施形態では、画角算出部357が撮影画角を算出する例で説明したが、本発明は、これに限定されない。例えば、ズームレンズ内に画角を検出するためのエンコーダが内蔵された撮影カメラの場合、本発明は、デジタルデータとして、ズームレンズのコネクター経由で撮影カメラの画角を取得することもできる。
【0114】
(第8実施形態)
[カメラデータ計測装置の構成]
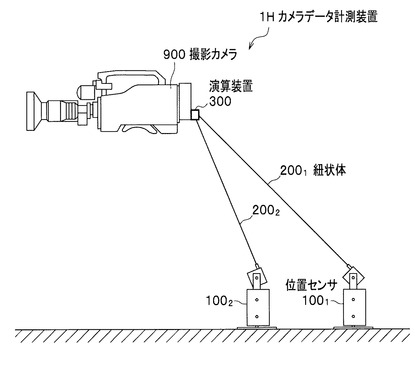
図20を参照して、本発明の第8実施形態に係るカメラデータ計測装置1Hについて、第1実施形態と異なる点を説明する。
カメラデータ計測装置1Hは、複数の位置センサ100を備え、各位置センサ100を予め設定された配置規則に従って配置した点が第1実施形態と異なる。
【0115】
第8実施形態では、説明を簡易にするため、カメラデータ計測装置1Hが、2個の位置センサ1001,1002を備えることとする。この場合、図20に示すように、カメラデータ計測装置1Hは、位置センサ1001,1002と撮影カメラ900とを、それぞれ、紐状体2001,2002で結ぶ。そして、位置センサ1001,1002は、それぞれ、紐状体2001,2002の紐長変化量ΔLを計測する。
【0116】
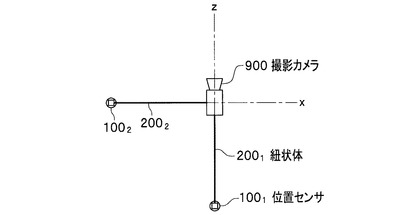
図21を参照して、位置センサ1001,1002の配置方法の一例について説明する。
図21の例では、配置規則が、位置センサ1001を撮影カメラ900の進行方向(z軸)の後側に配置し、位置センサ1002を進行方向に直交する注目方向(x軸)に配置されるものとなっている。ここで、進行方向に対して撮影カメラ900が横ずれを起こした場合を考える。この配置規則に従えば、位置センサ1002が横ずれ方向(注目方向)に配置されているため、この横ずれによる紐状体2002の紐長変化量ΔLを、正確に計測できる。従って、カメラデータ計測装置1Hは、位置センサ1002の計測データからカメラデータを求めることで、横ずれに起因するカメラデータの誤差を低減することができる。
【0117】
以上のように、本発明の第8実施形態に係るカメラデータ計測装置1Hは、複数の位置センサ100を備えることで、カメラデータの誤差を減少させ、特に、注目方向のカメラデータを高い精度で計測することができる。
【0118】
なお、第8実施形態では、2個の位置センサ100を進行方向と、進行方向に直交する注目方向とに配置することとしたが、本発明は、これに限定されない。つまり、本発明は、2個以上の位置センサ100を任意の場所に配置でき、各位置センサ100で計測された計測データの何れを利用するか又はこれら計測データを組み合わせるか、任意に設定できる。
【0119】
なお、第2〜8実施形態では、第1実施形態に係るカメラデータ計測装置1への適用例を説明したが、本発明は、これに限定されない。つまり、第2〜8実施形態の手法は、第1実施形態以外、他の実施形態に係るカメラデータ計測装置に適用することもできる。
【0120】
(変形例1)
図22を参照して、本発明の変形例1に係る位置計測装置2について、第1実施形態と異なる点を説明する。
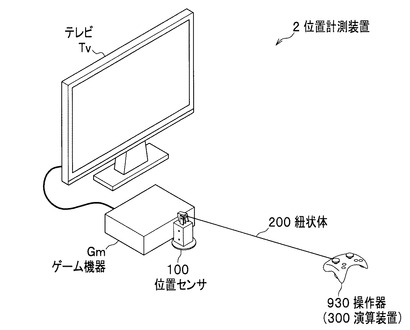
位置計測装置2は、計測対象を撮影カメラ900ではなく、ゲーム機器Gmの操作器930とした点が第1実施形態と異なる。
【0121】
図22に示すように、ゲーム機器Gmは、各種テレビゲームを実行するものであり、接続されたテレビTvにゲーム画面を表示する。また、ゲーム機器Gmは、レバーやボタンが配置された操作器930を備えている。ここで、プレイヤが操作器930のレバーやボタンを操作すると、その操作信号がゲーム機器Gmに送信される。そして、ゲーム機器Gmでは、この操作信号に応じて、例えば、ゲームキャラクタをゲーム画面内で移動させるといった処理を行う。
【0122】
また、プレイヤは、操作器930を傾けたり、前後左右上下に大きく動かして、ゲーム操作を行うこともできる。この場合、位置計測装置2は、操作器930に内蔵された演算装置300によって、操作器930の姿勢データを計測する。
【0123】
具体的には、位置センサ100は、ゲーム機器Gmの正面に配置され、操作器930の計測データを計測して演算装置300に送信する。
演算装置300は、受信した計測データから操作器930の位置データを算出すると共に、ジャイロセンサ320及び加速度センサ330によって、操作器930の姿勢データを計測する。そして、演算装置300は、操作器930の位置データと姿勢データとを、無線ネットワークを介して、ゲーム機器Gmに送信する。
以上のように、本発明の変形例1に係る位置計測装置2は、高い精度でゲーム操作を行うことができる。
【産業上の利用可能性】
【0124】
本発明は、VFX映画等の映画制作や、高度な合成を必要とするドラマ番組、情報番組、迅速なポストプロダクション処理が要求される報道番組等の番組制作に利用することができる。
【0125】
また、本発明は、6自由度の慣性センサとして幅広い分野で利用することができる。
例えば、自動車等の交通手段の位置を知るため、GPS(Global Positioning System)を基本としたナビゲーションステムが活用されている。このGPSでは、交通手段が衛星から遮られる環境下にあるときは測位が不可能になる。これを補うべく、従来の慣性センサで位置計測を行っているが、その精度向上は難しいのが現状である。そこで、本発明は、自動車等の交通手段を計測対象とすれば、その位置計測を高い精度で行うことができる。
この他、本発明は、各種操作器、身体障害者用の車イスや移動ロボットを計測対象として、これらの位置計測にも利用することができる。
【符号の説明】
【0126】
1,1B〜1H カメラデータ計測装置(位置計測装置)
2 位置計測装置
100,100B,100C 位置センサ(紐計測手段)
110 巻取・巻出機構
111 定張力ばね
112 第1プーリ
113 第2プーリ
120,120B 紐長変化量計測部
121 回転量計測部(回転量エンコーダ)
123,123B 紐長変化量算出部
125 フォトデテクタ(パターン検出部)
125a 発光部
125b 受光部
130 紐方向計測部
131 仰角エンコーダ
133 旋回角エンコーダ
140 計測データ送信部(送信部)
150 地磁気センサ(方位検出部)
160 北緯基準旋回角算出部(紐方向変換部)
190 筐体
190A 筐体上部
190B 連結部
190C 筐体下部
191 ベース
192a,192b,192c 軸受
193a,193b,193c 軸
194 支持棒
195 ノズル
196 固定板
200,200B 紐状体
210 NWケーブル
220 無線NW
300,300E〜300G 演算装置(位置データ算出手段)
310 姿勢データ計測部
320 ジャイロセンサ
321 パン方向ジャイロセンサ
323 チルト方向ジャイロセンサ
325 ヨー方向ジャイロセンサ
330 加速度センサ
331 左右方向加速度センサ
333 上下方向加速度センサ
335 前後方向加速度センサ
340 計測データ受信部(受信部)
350,350E〜350G CPU
351 位置データ算出部
353 姿勢データ算出部
361 パン方向エンコーダ
363 チルト方向エンコーダ
370 計測部
380 エンコーダ
390 基板
391 筐体
400 支持機構
410 スライダ
420 ガイド部材
430 ガイドベース
500 支持具
510,520 円筒部
530 ジョイント
540 固定部材
900 撮影カメラ(計測対象)
910 ズームレンズ
920 回転リング
930 操作器(計測対象)
Sys カメラデータ計測システム(位置計測システム)
【技術分野】
【0001】
本発明は、移動する計測対象に結ばれた紐状体の紐長変化量及び紐方向に基づいて、計測対象の位置データを算出する位置計測装置及び位置計測システムに関する。
【背景技術】
【0002】
番組制作や映画制作において、撮影カメラが動きながら撮影した映像に、CGや別の映像を合成することが広く行われている。この合成に際して、撮影カメラがどのように動いたか、つまり、撮影カメラの位置や姿勢を示すカメラデータが必要になる。
【0003】
従来から、カメラデータを計測する手法として、バーチャルスタジオで活用しているVR用ペデスタル(例えば、非特許文献1)や、三脚に載せて使用する構造のDGS(データ・ギャザリング・システム)が知られている。例えば、非特許文献1に記載の技術は、ロボットカメラを取り付ける雲台に特殊な細工を施すことで、ロボットカメラの動きや姿勢をカメラデータとして計測するものである。より具体的には、パン、チルト、ロール等の回転軸の回転角を検出するためのエンコーダが雲台に取り付けられており、ロボットカメラが動いたことによって変化する回転角の変化から、カメラデータを計測する。
【0004】
この他、番組制作や映画制作以外の分野でも、位置や姿勢を計測することは行われている。例えば、ゲーム機のリモコン操作器(コントローラ)は、ゲーム機本体に非接触でありながら、内蔵された加速度センサやジャイロセンサを用いて、その位置や姿勢を検出して、ゲーム操作を可能としている。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】「スタジオ番組用移動ロボットカメラの開発」、津田他、映像情報メディア学会誌、Vol.62、No.1、pp.84〜91(2008)
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、非特許文献1に記載の技術では、専用の大型装置(雲台)が必要になると共に、車輪部の構造や原点座標の設定の制約から、屋外のような平坦でない場所での使用が極めて困難である。
また、従来のDGSは、屋外で使用可能であるが、非特許文献1に記載の技術と同様、専用の大型装置を使用しなければならず、重く、機動性が悪いという欠点がある。
さらに、ゲーム機のリモコン操作器は、加速度センサやジャイロセンサに無視できないレベルの経時ドリフトやノイズが存在するため、その位置を高い精度で検出することができない。
【0007】
そこで、本発明は、機動性に優れ、平坦でない場所でも、高い精度で位置データを計測できる位置計測装置及び位置計測システムを提供することを課題とする。
【課題を解決するための手段】
【0008】
前記した課題に鑑みて、本願第1発明に係る位置計測装置は、所定の場所に配置され、移動する計測対象に結ばれた紐状体の紐長変化量と紐状体の紐方向とを計測する紐計測手段と、紐計測手段で計測された紐長変化量及び紐方向に基づいて、計測対象の位置データを算出する位置データ算出手段と、を備えることを特徴とする。
【0009】
かかる構成によれば、位置計測装置は、紐計測手段が、紐状体で一定の張力が保たれるように、計測対象に結ばれた紐状体の巻き取り及び巻き出しを行う巻取・巻出機構と、巻取・巻出機構によって張力が保たれた紐状体について、計測対象の移動に伴う紐長変化量を計測する紐長変化量計測部と、巻取・巻出機構によって張力が保たれた紐状体について、紐方向を計測する紐方向計測部と、を備える。
【0010】
また、位置計測装置は、位置データ算出手段が、予め設定された紐長初期値と紐計測手段で計測された紐長変化量との和を紐方向での紐全長として求め、求めた紐方向での紐全長を3次元方向成分に分解することで、3次元座標系で計測対象の位置データを算出す
る位置データ算出部、を備える。
【0011】
つまり、位置計測装置は、紐状体が計測対象に結ばれ、計測対象の移動に伴って紐状体が巻き取り又は巻き出しされるため、計測対象の移動距離が紐長変化量に正確に反映される。そして、位置計測装置は、専用の大型装置を必要とせず、計測対象に紐計測手段を装着する必要もない。さらに、位置計測装置は、平坦でない場所に紐計測手段を配置して、位置データを計測できる。
【0012】
また、本願第2発明に係る位置計測装置は、巻取・巻出機構が、紐状体の張力を保つ定張力ばねと、紐状体の巻き取り及び巻き出しを行うプーリと、を備え、紐長変化量計測部が、プーリの回転量を計測する回転量計測部と、予め設定されたプーリの円周に回転量計測部で計測されたプーリの回転量を乗じることで、紐長変化量を算出する紐長変化量算出部と、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、プーリの回転量が紐長変化量に比例するため、より正確な紐長変化量を算出することができる。
【0013】
また、本願第3発明に係る位置計測装置は、紐状体が、等間隔で長手方向にパターンが形成されており、紐長変化量計測部が、紐状体の巻き取り及び巻き出しに伴うパターンの反転変化を検出するパターン検出部と、パターン検出部で検出されたパターンの反転変化によって、紐長変化量を算出する紐長変化量算出部と、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、紐状体から直接、パターンの反転変化を検出するため、より正確な紐長変化量を算出することができる
【0014】
また、本願第4発明に係る位置計測装置は、計測対象に結ばれた紐状体が水平となる高さで紐計測手段を支持する支持機構に搭載されたことを特徴とする。
かかる構成によれば、位置計測装置は、計測対象に結ばれた紐状体が水平なので、この計測対象が水平から引っ張られて、高い場所や低い場所から計測対象が引っ張られることを防止できる。
【0015】
また、本願第5発明に係る位置計測装置は、紐計測手段が、所定の方位を検出する方位検出部と、紐方向計測部で計測された紐方向を、方位検出部で検出された方位を基準とした方向に変換する紐方向変換部と、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、北緯などの方位を基準として、計測対象の位置データを計測することができる。
【0016】
また、本願第6発明に係る位置計測装置は、紐状体が紐長変化量及び紐方向を伝送する信号線であり、紐計測手段が、信号線を介して、紐長変化量及び紐方向を位置データ算出手段に送信する送信部、を備え、位置データ算出手段が、計測対象に装着されると共に、信号線を介して、紐計測手段から長変化量及び紐方向を受信する受信部、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、紐長変化量及び紐方向を伝送する信号ケーブルを省略することができる。
【0017】
また、本願第7発明に係る位置計測装置は、予め設定された配置規則に従って、複数の紐計測手段が配置され、複数の紐計測手段が、それぞれ、同一の計測対象に結ばれた紐状体の紐長変化量を計測することを特徴とする。
かかる構成によれば、位置計測装置は、例えば、第1の紐計測手段を計測対象の進行方向の後方に配置し、第2の紐計測手段をその進行方向に直交する注目方向に配置するという配置規則に従って、第1,第2の紐計測手段を配置する。この場合、位置計測装置は、進行方向に対して計測対象が横ずれを起こしても、この横ずれ方向(注目方向)に第2の紐計測手段が配置されているので、この横ずれに起因する誤差を低減することができる。
【0018】
また、本願第8発明に係る位置計測装置は、位置データ算出手段が、パン方向、チルト方向及びヨー方向で計測対象の向きを示す姿勢データを計測する姿勢データ計測部、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、計測対象の位置データに加えて、姿勢データも計測することができる。
【0019】
また、本願第9発明に係る位置計測装置は、位置データ算出手段が、計測対象としての撮影カメラに装着され、位置データ算出部が、撮影カメラが撮影した撮影映像の同期信号が入力され、入力された同期信号に同期させて計測対象の位置データを算出し、姿勢データ計測部が、同期信号が入力され、入力された同期信号に同期させて計測対象の姿勢データを計測することを特徴とする。
かかる構成によれば、位置計測装置は、撮影カメラが撮影映像を撮影したタイミングに同期させて、撮影カメラの位置データ及び姿勢データをカメラデータとして計測することができる。
【0020】
また、本願第10発明に係る位置計測装置は、位置データ算出手段が、撮影カメラが備えるズームレンズのリング回転量を計測するエンコーダと、リング回転量と撮影カメラの画角とを対応付けた撮影画角テーブルが予め設定され、撮影画角テーブルを参照して、エンコーダが計測したリング回転量から撮影カメラの画角を算出する画角算出部と、を備えることを特徴とする。
かかる構成によれば、位置計測装置は、カメラデータに撮影カメラの画角を付加することができる。
【0021】
また、本願第11発明に係る位置計測システムは、本願第1発明から本願第10発明までの何れかに係る位置計測装置と、計測対象としての撮影カメラと、を備えることを特徴とする。
【発明の効果】
【0022】
本発明によれば、以下のような優れた効果を奏する。
本願第1,11発明によれば、紐状体が計測対象に結ばれ、計測対象の移動に伴って紐状体が巻き取り又は巻き出しされるため、計測対象の移動距離が紐長変化量に正確に反映され、計測対象の位置データを高い精度で計測することができる。さらに、本願第1,11発明によれば、専用の大型装置を必要とせず、計測対象に紐計測手段を装着する必要もなく、機動性に優れる。さらに、本願第1,11発明によれば、平坦でない場所に紐計測手段を配置して、位置データを計測することができる。
【0023】
本願第2,11発明によれば、プーリの回転量が紐長変化量に比例するため、より正確な紐長変化量を算出して、計測対象の位置データをより高い精度で計測することができる。
本願第3,11発明によれば、紐状体から直接、パターンの反転変化を検出するため、正確な紐長変化量を算出して、計測対象の位置データをより高い精度で計測することができる。
本願第4,11発明によれば、計測対象が水平に引っ張られるため、高い場所や低い場所から計測対象が引っ張られることを防止して、計測対象の姿勢を安定させて、計測対象の位置データをより高い精度で計測することができる。
【0024】
本願第5,11発明によれば、北緯などの方位を基準として、計測対象の位置データを計測することができる。
本願第6,11発明によれば、紐長変化量及び紐方向を伝送する信号ケーブルを省略できるため、位置計測装置が簡易な構成となり、機動性により優れる。
本願第7,11発明によれば、位置データの計測誤差を低減することができる。
【0025】
本願第8,11発明によれば、計測対象の位置データに加えて、姿勢データも計測することができる。
本願第9,11発明によれば、撮影カメラが撮影映像を撮影したタイミングに同期させて、カメラデータを計測するため、撮影映像とカメラデータとの時間軸が一致して、映像加工処理を効率的に行うことができる。
本願第10,11発明によれば、カメラデータに撮影カメラの画角が付加されるので、映像加工処理をより効率的に行うことができる。
【図面の簡単な説明】
【0026】
【図1】(a)は本発明の第1実施形態に係るカメラデータ計測システムの概略図であり、(b)は撮影カメラの移動方向及び回転方向を説明する説明図である。
【図2】(a)は筐体上部の断面図であり、(b)及び(c)は筐体下部の断面図である。
【図3】(a)は位置センサ(筐体上部)の仰角を説明する説明図であり、(b)は位置センサ(筐体下部)の旋回角を説明する説明図である。
【図4】図2の位置センサにおいて、各手段の信号入出力を図示したブロック図である。
【図5】図2の位置センサにおける計測データの伝送を説明する説明図であり、(a)は紐状体200を信号線として兼用するときの図であり、(b)は有線ネットワークを用いるときの図であり、(c)は無線ネットワークを用いるときの図である。
【図6】図1の演算装置の構造を示す図である。
【図7】図6の演算装置において、各手段の信号入出力を図示したブロック図である。
【図8】図4の位置センサの動作を示すフローチャートである。
【図9】図7の演算装置の動作を示すフローチャートである。
【図10】本発明の第2実施形態に係るカメラデータ計測装置において、フォトデテクタを説明する説明図である。
【図11】図10の位置センサにおいて、各手段の信号入出力を図示したブロック図である。
【図12】本発明の第3実施形態に係るカメラデータ計測装置において、位置センサの上面図である。
【図13】図12の位置センサにおいて、各手段の信号入出力を図示したブロック図である。
【図14】本発明の第4実施形態に係るカメラデータ計測装置の概略図である。
【図15】本発明の第5実施形態に係るカメラデータ計測装置において、演算装置に固定された支持具を説明する説明図である。
【図16】本発明の第5実施形態に係るカメラデータ計測装置において、位置センサでの信号入出力を図示したブロック図である。
【図17】本発明の第6実施形態に係るカメラデータ計測装置の概略図である。
【図18】本発明の第7実施形態において、エンコーダを説明する説明図である。
【図19】図18の演算装置において、各手段の信号入出力を図示したブロック図である。
【図20】本発明の第8実施形態に係るカメラデータ計測装置の概略図である。
【図21】図20のカメラデータ計測装置において、位置センサの配置例を説明する説明図である。
【図22】本発明の変形例1に係る位置計測装置の概略図である。
【発明を実施するための形態】
【0027】
以下、本発明の実施形態について、適宜図面を参照しながら詳細に説明する。なお、各実施形態において、同一の機能を有する手段には同一の符号を付し、説明を省略した。
【0028】
(第1実施形態)
[カメラデータ計測システムの概略]
図1を参照して、本発明の第1実施形態に係るカメラデータ計測システム(位置計測システム)Sysの概略について説明する。
図1(a)に示すように、カメラデータ計測システムSysは、カメラデータ計測装置(位置計測装置)1と、計測対象としての撮影カメラ900とを備える。
このカメラデータ計測装置1は、位置センサ(紐計測手段)100と、紐状体200と、演算装置(位置データ算出手段)300とを備える。
【0029】
位置センサ100は、紐状体200の紐長変化量ΔLと紐方向(仰角α、旋回角β)とを計測するものである。この位置センサ100は、撮影カメラ900が移動する床や地面において、位置データの計測基準となる所定の場所に配置される。そして、位置センサ100は、計測した紐長変化量ΔL及び紐方向を演算装置300に送信する。
【0030】
紐状体200は、糸、ロープ、ワイヤ、信号ケーブル等の紐状素材である。この紐状体200は、一方の端が撮影カメラ900(正確には撮影カメラ900に装着された演算装置300)に結ばれ、他方の端が位置センサ100に接続される。そして、紐状体200は、位置センサ100の巻取・巻出機構110(図2)によって、常に張力が保たれると共に、撮影カメラ900の移動に伴って、巻き取り及び巻き出しが行われる。
【0031】
演算装置300は、位置センサ100から紐長変化量ΔL及び紐方向が入力され、この紐長変化量ΔL及び紐方向に基づいて、撮影カメラ900の位置データを計測(算出)するものである。この演算装置300は、撮影カメラ900の後部に装着、固定される。また、演算装置300は、姿勢データ計測部310(図7)によって、撮影カメラ900の姿勢データを計測し、この姿勢データと位置データとをカメラデータとして出力する。
【0032】
撮影カメラ900は、テレビ番組等の撮影映像を撮影するカメラであり、カメラマン(不図示)が肩に載せて撮影を行う一般的な肩載式のカメラである。つまり、カメラマンは、撮影カメラ900を肩に載せた状態で、床や地面を前後左右に移動しながら撮影を行う。また、カメラマンが撮影ポジションを変えるため、撮影カメラ900を上下に移動させることもある。
【0033】
この場合、撮影カメラ900の位置が変わることによって、撮影カメラ900の方向や紐長が変化する。つまり、紐状体200の紐方向は、位置センサ100を基準とした、撮影カメラ900の方向を示すことになる。さらに、紐状体200の紐長変化量ΔLは、撮影カメラ900が移動した距離を示すことになる。従って、カメラデータ計測装置1は、この紐長変化量ΔL及び紐方向に基づいて、撮影カメラ900の位置データを計測することができる。
【0034】
図1(b)に示すように、x軸を左右方向とし、y軸を上下方向とし、z軸を前後方向とする。また、y軸が回転軸となる回転方向θをパン方向とし、x軸が回転軸となる回転方向φをチルト方向とし、z軸が回転軸となる回転方向Ψをヨー方向とする。
【0035】
[位置センサ]
<位置センサの構造>
図2を参照して、位置センサ100の構造を説明した後、図4を参照して、位置センサ100の信号処理を説明する。
図2に示すように、位置センサ100は、巻取・巻出機構110と、紐長変化量計測部120と、紐方向計測部130と、計測データ送信部(送信部)140とを備える。
なお、図2では、紐長変化量算出部123及び計測データ送信部140を省略した。
【0036】
位置センサ100は、筐体190の内部にほとんどの手段が収納されている。
この筐体190は、仰角方向(チルト方向)に回転可能な筐体上部190Aと、筐体上部190A及び筐体下部190Cを連結する連結部190Bと、旋回方向(パン方向)に回転可能な筐体下部190Cとで構成される。
【0037】
筐体上部190Aは、連結部190Bに挟み込まれるように、仰角方向に回転自在に支持される。また、筐体上部190Aは、紐状体200を出し入れするために、側方に突出したノズル195と、底面に貫通孔197とが形成される。
連結部190Bは、対向した2枚の平板部材が、筐体下部190Cの天面外側に固定されたものである。また、連結部190Bは、軸受192aを同軸に形成し、この軸受192aに挿入された軸193aにより、筐体上部190Aを支持する。
【0038】
筐体下部190Cは、側面上部に軸受192bが同軸で形成され、この軸受192bに軸193bが挿入される。
また、筐体下部190Cは、底面に軸受192cが形成され、この軸受192cに軸193cが挿入される。この軸193cは、下端部の軸径を広くして、ベース191に接続される。このようにして、筐体下部190Cは、軸193cにより、旋回方向に回転自在に支持される。
さらに、筐体下部190Cは、この軸193bと平行になるように、側面下部に支持棒194が形成される。
ベース191は、位置センサ100を配置するときに、床や地面に接する土台部分である。
【0039】
巻取・巻出機構110は、紐状体200で一定の張力が保たれるように、紐状体200の巻き取り及び巻き出しを行うものであり、定張力ばね111と、第1プーリ112と、第2プーリ113とを備える。
定張力ばね111は、筐体下部190Cに収納され、両端が軸193cと支持棒194とにそれぞれ接続される。また、定張力ばね111は、軸193cを介して、第2プーリ113を巻き取り方向に回転させようとする。このようにして、紐状体200は、一定の張力が保たれる。
【0040】
第1プーリ112は、筐体上部190Aに収納され、軸193aによって仰角方向に回転自在に支持される。また、第1プーリ112は、貫通孔197から垂直に引き込まれる紐状体200を、ノズル195から引き出されるように誘導する。
第2プーリ113は、筐体下部190Cに収納され、第1プーリ112と上下で並ぶように軸193bに支持される。ここで、第2プーリ113は、紐長変化量ΔLの計算誤差を低減するため、紐状体200を1重巻きにすることが好ましい。
このようにして、紐状体200は、第1プーリ112を介して、第2プーリ113に巻き取り、巻き出しされる。
【0041】
紐長変化量計測部120は、巻取・巻出機構110によって張力が保たれた紐状体200について、撮影カメラ900の移動に伴う紐長変化量ΔLを計測するものであり、回転量エンコーダ(回転量計測部)121と、紐長変化量算出部123とを備える。
回転量エンコーダ121は、筐体下部190Cに収納され、第2プーリ113と同軸で軸193bに支持される。そして、回転量エンコーダ121は、軸193bを介して、第2プーリ113の回転量(回転角)ωを計測する。この回転量ωは、例えば、第2プーリ113が巻き出し方向に回転していれば正(+)の値となり、巻き取り方向に回転していれば負(−)の値となる。
なお、紐長変化量算出部123の詳細は、後記する。
【0042】
紐方向計測部130は、巻取・巻出機構110によって張力が保たれた紐状体200について紐方向を計測するものであり、仰角エンコーダ131と、旋回角エンコーダ133とを備える。
仰角エンコーダ131は、第1プーリ112と同軸で連結部190Bに固定され、軸193aの一端が接続される。そして、仰角エンコーダ131は、軸193aを介して、位置センサ100(筐体上部190A)の仰角αを紐方向として計測する。
旋回角エンコーダ133は、筐体下部190Cの下部内側に突出した固定板196に下向きで固定され、軸193cの一端が接続される。そして、旋回角エンコーダ133は、軸193cを介して、位置センサ100(筐体下部190C)の旋回角βを紐方向として計測する。
【0043】
ここで、図3を参照して、紐方向について説明する。
例えば、図3(a)に示すように、撮影カメラ900が低い位置にあり、紐状体200が水平であったとする(仰角α=0°)。そして、撮影カメラ900が高い位置に移動すると、撮影カメラ900が紐状体200をy軸方向に引っ張ることで、筐体上部190Aは、紐状体200と同じ向きになるまで仰角方向に回転する。このとき、仰角エンコーダ131は、水平面に対する筐体上部190Aの仰角αを、紐方向として計測する。つまり、仰角αは、設置面(床や地面)に対する紐状体200のチルト角である。
【0044】
例えば、図3(b)に示すように、撮影カメラ900が正面を向いており、紐状体200がz軸に平行であったとする(旋回角β=0°)。そして、撮影カメラ900が左右に移動すると、撮影カメラ900が紐状体200をx軸方向に引っ張ることで、筐体下部190Cは、紐状体200と同じ向きになるまで旋回方向に回転する。このとき、旋回角エンコーダ133は、前後方向に対する筐体下部190Cの旋回角βを、紐方向として計測する。つまり、旋回角βは、前後方向(z軸)に対する紐状体200のパン角である。
【0045】
<位置センサの信号処理>
図4を参照して、位置センサ100の信号処理について説明する(適宜図1,図2参照)。
なお、図4では、信号を入出力しない巻取・巻出機構110等の一部手段を省略した。
【0046】
紐長変化量算出部123は、回転量エンコーダ121で計測された第2プーリ113の回転量ωが入力される。そして、紐長変化量算出部123は、下記の式(1)に示すように、予め設定された第2プーリ113の円周2πrに、入力された第2プーリ113の回転量ωを乗じることで、紐状体200の紐長変化量ΔLを算出する。その後、紐長変化量算出部123は、算出した紐長変化量ΔLを計測データ送信部140に出力する。
ΔL=2πr×ω ・・・式(1)
なお、rは第2プーリ113の半径であり、πは円周率である。
【0047】
前記したように、第2プーリ113が紐状体200を1重巻きしているため、紐状体200の重なりに伴って、円周が増大することがない。従って、紐長変化量算出部123は、高い精度で紐長変化量ΔLを算出することができる。
【0048】
紐方向計測部130は、仰角エンコーダ131で計測された紐方向(仰角α)と、旋回角エンコーダ133で計測された紐方向(旋回角β)とを、計測データ送信部140に出力する。
【0049】
計測データ送信部140は、紐長変化量計測部120から紐長変化量ΔLが入力され、紐方向計測部130から紐方向(仰角α及び旋回角β)が入力される。そして、計測データ送信部140は、入力された紐長変化量ΔLと、仰角αと、旋回角βとを計測データとして、演算装置300に送信するものである。この計測データ送信部140は、一般的なネットワークインタフェースで実現できるため、詳細な説明を省略する。
【0050】
ここで、計測データの伝送方法について、3つの具体例を説明する。
図5(a)に示すように、カメラデータ計測装置1は、紐状体200を、計測データを伝送する信号線と兼用してもよい。つまり、計測データ送信部140は、紐状体200を介して、計測データを演算装置300に送信する。この手法によれば、カメラデータ計測装置1は、計測データを伝送するための信号ケーブルを省略できるので、カメラデータ計測装置1が簡易な構成となり、撮影時の機動性により優れる。
【0051】
また、図5(b)に示すように、カメラデータ計測装置1は、有線ネットワークによって計測データを伝送してもよい。つまり、計測データ送信部140は、NWケーブル210を介して、計測データを演算装置300に送信する。
さらに、図5(c)に示すように、計測データ送信部140は、無線ネットワーク(無線NW)220によって、計測データを演算装置300に送信してもよい。
【0052】
なお、図5(a)のように、紐状体200を信号線として兼用する場合、カメラデータ計測装置1は、紐状体200を演算装置300に結ぶ必要がある。この場合、撮影カメラ900が移動すると、この撮影カメラ900に演算装置300が固定されているので、演算装置300が、撮影カメラ900と同じ距離だけ移動する。従って、カメラデータ計測装置1は、紐状体200を演算装置300又は撮影カメラ900の何れに結んでも紐長変化量ΔLが同じ値になり、正確な計測データを得ることができる。
すなわち、請求項に記載の「計測対象に結ばれた紐状体」とは、撮影カメラ900に結ばれた紐状体200、又は、この撮影カメラ900に固定された演算装置300に結ばれた紐状体200の意味である。
【0053】
[演算装置の構成]
図6,図7を参照して、図1の演算装置300の構成について説明する。
図6に示すように、演算装置300は、ジャイロセンサ320と、加速度センサ330と、計測データ受信部340(受信部、図7)と、CPU(Central Processing Unit)350とを備える。
【0054】
演算装置300は、基板390の上段にジャイロセンサ320と加速度センサ330とが配置され、基板390の下段にCPU350が配置される。また、演算装置300は、ジャイロセンサ320及び加速度センサ330とCPU350との間で信号を入出力できるように、図示を省略した回路が形成される。そして、演算装置300は、前記した各手段が配置された基板390を、箱型の筐体391に収納する。
【0055】
図7に示すように、姿勢データ計測部310は、パン方向、チルト方向及びヨー方向で撮影カメラ900の向きを示す姿勢データを計測するものであり、ジャイロセンサ320と、加速度センサ330とで構成される。
ジャイロセンサ320は、パン方向ジャイロセンサ321と、チルト方向ジャイロセンサ323と、ヨー方向ジャイロセンサ325とで構成される。
パン方向ジャイロセンサ321は、演算装置300及びこの演算装置300が装着された撮影カメラ900について、パン方向の角速度を計測するものである。
チルト方向ジャイロセンサ323は、演算装置300及び撮影カメラ900について、チルト方向の角速度を計測するものである。
ヨー方向ジャイロセンサ325は、演算装置300及び撮影カメラ900について、ヨー方向の角速度を計測するものである。
そして、ジャイロセンサ320は、計測したパン方向、チルト方向及びヨー方向の角速度を速度データとしてCPU350に出力する。
【0056】
加速度センサ330は、左右方向加速度センサ331と、上下方向加速度センサ333と、前後方向加速度センサ335とで構成される。
左右方向加速度センサ331は、演算装置300及びこの演算装置300が装着された撮影カメラ900について、左右方向(x軸方向)の加速度を計測するものである。
上下方向加速度センサ333は、演算装置300及び撮影カメラ900について、上下方向(y軸方向)の加速度を計測するものである。
前後方向加速度センサ335は、演算装置300及び撮影カメラ900について、前後方向(z軸方向)の加速度を計測するものである。
そして、加速度センサ330は、計測した左右方向、上下方向及び前後方向の加速度を加速度データとしてCPU350に出力する。
【0057】
なお、ジャイロセンサ320及び加速度センサ330は、一般的なMEMS(Micro Electro Mechanical Systems)慣性センサを利用できるため、詳細な説明を省略する。このMEMS慣性センサは、コンパクトに集積可能であり、演算装置300の小型化に寄与する。
【0058】
計測データ受信部340は、位置センサ100から、紐長変化量ΔLと、仰角αと、旋回角βとを計測データとして受信するものである。ここで、計測データ受信部340は、図4の計測データ送信部140と同様の手法で、計測データを受信する。そして、計測データ受信部340は、受信した計測データをCPU350に出力する。この計測データ受信部340は、一般的なネットワークインタフェースで実現できるため、詳細な説明を省略する。
【0059】
CPU350は、演算装置300での各種演算を行うものであり、位置データ算出部351と、姿勢データ算出部353とを備える。ここで、CPU350は、ジャイロセンサ320から速度データが入力され、加速度センサ330から加速度データが入力され、計測データ受信部340から計測データが入力される。
【0060】
位置データ算出部351は、撮影カメラ900の位置データを算出するものである。ここで、紐状体200の紐全長Lとすると、3次元座標系での撮影カメラ900の位置データ(Px,Py,Pz)は、下記の式(2)で計算することができる。
(Px,Py,Pz)=(L・cosα・sinβ,L・sinα,
L・cosα・cosβ) ・・・式(2)
【0061】
すなわち、位置データ算出部351は、予め設定された紐長初期値L0と、紐長変化量ΔLとの和を紐方向での紐全長Lとして求める。そして、位置データ算出部351は、式(2)に示すように、紐方向での紐全長Lを3次元方向成分に分解することで、位置データ(Px,Py,Pz)を算出する。
【0062】
ここで、撮影カメラ900と位置センサ100との距離が、例えば、1メートル離れた状態(つまり、紐状体200の一部が巻き出された状態)で、位置データの計測を開始することがある。この場合、位置データ算出部351は、位置データの計測開始時点において、巻き出されていた紐状体200の紐長である紐長初期値L0を、予め設定する。
【0063】
姿勢データ算出部353は、ジャイロセンサ320からの速度データと加速度センサ330からの加速度データとから、撮影カメラ900の向きを示す姿勢データを算出するものである。ここで、加速度データにより撮影カメラ900がどちらの方向に移動しようとしたか分かる。従って、姿勢データ算出部353は、例えば、加速度センサ330からの加速度データに、ジャイロセンサ320からの速度データに相乗しているクロストーク分を補正して積分処理を行う。このようにして、姿勢データ算出部353は、パン方向、チルト方向及びヨー方向について、撮影カメラ900の姿勢データ(Pθ,Pφ,PΨ)を算出する。
【0064】
その後、CPU350は、位置データ算出部351が算出した位置データと、姿勢データ算出部353が算出した姿勢データとを、カメラデータとして出力する。
なお、速度データ及び加速度データから姿勢データを算出する方法は、MEMS慣性センサの実装に依存する一般的な処理のため、詳細な説明を省略する。
【0065】
[位置センサの動作]
図8を参照して、図4の位置センサ100の動作について説明する(適宜図4参照)。
位置センサ100は、仰角エンコーダ131によって、位置センサ100(筐体上部190A)の仰角αを紐方向として計測する(ステップS1)。
【0066】
位置センサ100は、旋回角エンコーダ133によって、位置センサ100(筐体下部190C)の旋回角βを紐方向として計測する(ステップS2)。
位置センサ100は、回転量エンコーダ121によって、第2プーリ113の回転量ωを計測する(ステップS3)。
【0067】
位置センサ100は、紐長変化量算出部123によって、前記した式(1)に示すように、第2プーリ113の円周にその回転量ωを乗じることで、紐長変化量ΔLを算出する(ステップS4)。
【0068】
位置センサ100は、計測データ送信部140によって、紐長変化量ΔLと、仰角αと、旋回角βとを計測データとして、演算装置300に送信する。つまり、計測データ送信部140は、信号線としての紐状体200、有線ネットワーク、又は、無線ネットワークの何れかによって、計測データを送信する(ステップS5)。
【0069】
[演算装置の動作]
図9を参照して、図7の演算装置300の動作について説明する(適宜図7参照)。
演算装置300は、ジャイロセンサ320によって、速度データを計測する(ステップS11)。
【0070】
演算装置300は、加速度センサ330によって、加速度データを計測する(ステップS12)。
演算装置300は、姿勢データ算出部353によって、速度データ及び加速度データから姿勢データを算出する(ステップS13)。
【0071】
演算装置300は、計測データ受信部340によって、位置センサ100から、紐長変化量ΔLと、仰角αと、旋回角βとを計測データとして受信する。つまり、計測データ受信部340は、図4の計測データ送信部140と同様の手法で、計測データを受信する(ステップS14)。
【0072】
演算装置300は、位置データ算出部351によって、撮影カメラ900の位置データを算出する。つまり、位置データ算出部351は、紐長初期値L0と紐長変化量ΔLとの和を紐方向での紐全長Lとして求める。そして、位置データ算出部351は、前記した式(2)に示すように、紐方向での紐全長Lを3次元方向成分に分解することで、3次元座標系で撮影カメラ900の位置データを算出する(ステップS15)。
演算装置300は、CPU350によって、撮影カメラ900の位置データと姿勢データとを、カメラデータとして出力する(ステップS16)。
【0073】
以上のように、本発明の第1実施形態に係るカメラデータ計測装置1は、紐状体200が撮影カメラ900に結ばれ、撮影カメラ900の移動に伴って紐状体200が巻き取り又は巻き出しされるため、撮影カメラ900の移動距離が紐長変化量ΔLに正確に反映され、撮影カメラ900のカメラデータを高い精度で計測することができる。さらに、カメラデータ計測装置1は、専用の大型装置を必要とせず、撮影カメラ900に位置センサ100を装着する必要もなく、撮影カメラ900の重量増加を最小限に抑えてられるため、撮影時の機動性に優れる。さらに、カメラデータ計測装置1は、床や地面が平坦でない場所にも位置センサ100を配置できるため、平坦でない場所でもカメラデータを計測することができる。
【0074】
そして、このカメラデータを用いれば、撮影映像にCGや他の映像を合成する、撮影映像の一部に追随して映像効果を加える等の映像加工処理が可能になり、映像表現の幅を拡大することができる。これによって、カメラデータ計測装置1のユーザは、映画のような大スペクタクルな映像をテレビ番組として容易に制作できるようになり、迫力があって分かり易い映像を視聴者に提供することができる。
【0075】
さらに、個人情報保護の観点からニュース番組等において、映像の一部にぼかしを加えて人物等の判別を困難にする映像加工処理を施す機会も増加している。このような場合、カメラデータ計測装置1のユーザは、その映像加工処理を効率的に行うことができる。
【0076】
なお、第1実施形態では、撮影カメラ900の姿勢データを計測するため、位置センサ100と演算装置300とを独立させたが、本発明は、これに限定されない。例えば、この姿勢データを計測しない場合、位置センサ100が位置データ算出部351を内蔵してもよい。
【0077】
(第2実施形態)
[位置センサの構成]
図10,図11を参照して、本発明の第2実施形態に係るカメラデータ計測装置1Bについて、第1実施形態と異なる点を説明する。
カメラデータ計測装置1Bは、位置センサ100Bにおいて、回転量エンコーダ121の代わりにフォトデテクタ(パターン検出部)125を備える点と、紐長変化量算出部123Bで紐長変化量ΔLを求める手法とが第1実施形態と異なる。
なお、図10では、巻き出し方向及び巻き取り方向をブロック矢印で図示した。
【0078】
図10に示すように、紐状体200Bは、その外表面に長手方向(巻き出し方向、巻き取り方向)で、白色、黒色が交互する縞模様が模様パターンとして印刷されている。
紐長変化量計測部120B(図11)は、後記する紐長変化量算出部123Bと、フォトデテクタ125とを備える。
フォトデテクタ125は、紐状体200Bの巻き取り、巻き出しに伴う模様パターンの反転変化を検出するものである。例えば、フォトデテクタ125は、発光部125aから検出光を紐状体200Bに向けて照射し、紐状体200Bで反射された検出光を受光部125bで受光する反射型のフォトデテクタである。このフォトデテクタ125は、検出光の照射及び反射が可能であれば、筐体190内部の任意場所に配置できる。
【0079】
ここで、紐状体200Bは、例えば、模様パターンが白色のときに検出光を反射し、黒色のときに検出光を反射しないというように、検出光の照射点における模様パターンに応じて、検出光を反射するか否かが異なる。そして、紐状体200Bが巻き取り、巻き出しされる状況では、検出光の照射点において、模様パターンで白色、黒色が反転変化する。言い換えるなら、検出光の照射点において、模様パターンの反転変化が、紐状体200Bが巻き取り、巻き出しされる状況を表す。従って、フォトデテクタ125は、検出光の有無により模様パターンでの色の反転変化を検出して、紐長変化量算出部123Bに出力する。
【0080】
図11の紐長変化量算出部123Bは、フォトデテクタ125から模様パターンの反転変化が入力され、この模様パターンの反転変化によって紐長変化量ΔLを算出するものである。例えば、紐長変化量算出部123Bは、紐状体200Bの模様パターンの間隔が予め設定される。そして、紐長変化量算出部123Bは、この模様パターンの間隔と、フォトデテクタ125で検出された模様パターンの反転変化の回数とから、紐状体200Bが巻き取り、巻き出しされた長さが分かるので、紐長変化量ΔLを算出できる。
【0081】
ここで、フォトデテクタ125単体では、紐状体200Bが巻き取り又は巻き出しされているのかを判定することができない。そこで、カメラデータ計測装置1Bは、例えば、第2プーリ113の回転方向を検出する回転方向センサ(不図示)を備える。そして、紐長変化量算出部123Bは、この回転方向センサによって、紐状体200Bが巻き取り又は巻き出しされているかを判定する。その後、紐長変化量算出部123Bは、紐状体200Bが巻き出しされていれば紐長変化量ΔLを正(+)の値とし、紐状体200Bが巻き取りされていれば紐長変化量ΔLを負(−)の値として、計測データ送信部140に出力する。
【0082】
以上のように、本発明の第2実施形態に係るカメラデータ計測装置1Bは、位置センサ100Bが、紐状体200Bから直接、模様パターンの反転変化を検出するため、正確に紐長変化量ΔLを算出して、カメラデータをより高い精度で計測することができる。
【0083】
なお、第2実施形態では、紐状体200Bに模様パターンを印刷し、フォトデテクタ125で模様パターンの反転変化を検出することとしたが、本発明は、これに限定されない。例えば、本発明は、磁性体である紐状体200に磁気パターンを記録し、この磁気パターンの反転変化をマグネティックセンサで検出できる。
【0084】
なお、第2実施形態において、位置センサ100Bの動作は、紐長変化量算出部123Bでの紐長変化量ΔLを求める手法以外、図8と同様のため、詳細な説明を省略した。
以後の実施形態においても、第2実施形態と同様、動作の説明を省略する。
【0085】
(第3実施形態)
[位置センサの構成]
図12,図13を参照して、本発明の第3実施形態に係るカメラデータ計測装置1Cについて、第1実施形態と異なる点を説明する。
カメラデータ計測装置1Cは、位置センサ100Cが、地磁気センサ(方位検出部)150と北緯基準旋回角算出部160とを備える点が第1実施形態と異なる。
【0086】
地磁気センサ150は、北緯を検出するものである。図12に示すように、地磁気センサ150は、位置センサ100Cが旋回しても地磁気センサ150の向きが変わらないように、ベース191の周縁部に固定されている。そして、地磁気センサ150は、検出した北緯情報を、北緯基準旋回角算出部(紐方向変換部)160に出力する。
【0087】
北緯基準旋回角算出部160は、地磁気センサ150から北緯情報が入力され、旋回角エンコーダ133で計測された紐方向(旋回角β)を、北緯を基準とした北緯基準旋回角β´に変換するものである。そして、北緯基準旋回角算出部160は、変換した北緯基準旋回角β´を計測データ送信部140に出力する。
【0088】
以上のように、本発明の第3実施形態に係るカメラデータ計測装置1Cは、紐方向(旋回角β)を、北緯を基準とした絶対座標系で表すことができる。これによって、カメラデータ計測装置1Cは、位置センサ100Cから見て、撮影カメラ900が東西南北どの方位にあるかを、ユーザに即座に提示することができる。
【0089】
第3実施形態では、位置センサ100Cの旋回角が0°となる初期方位β0を予め設定しておき、初期方位β0と北緯基準旋回角β´との差分を式(2)のβに代入すれば、北緯基準旋回角β´から位置データを求めることができる。
【0090】
(第4実施形態)
[カメラデータ計測装置の構成]
図14を参照して、本発明の第4実施形態に係るカメラデータ計測装置1Dについて、第1実施形態と異なる点を説明する。
カメラデータ計測装置1Dは、位置センサ100が支持機構400に搭載された点が第1実施形態と異なる。
【0091】
図14に示すように、カメラデータ計測装置1Dは、位置センサ100と、紐状体200と、演算装置300と、支持機構400とを備える。
支持機構400は、スライダ410と、ガイド部材420と、ガイドベース430とを備える。
スライダ410は、位置センサ100を搭載する平板部材であり、ガイド部材420に取り付けられる。また、スライダ410は、ガイド部材420に沿って高さを調整できると共に、所望の高さでガイド部材420に固定できる。
ガイド部材420は、垂直に伸びた棒状部材であり、下端部がガイドベース430に接続される。
ガイドベース430は、床や地面に接する土台部分である。
【0092】
例えば、撮影時、撮影カメラ900に結ばれた紐状体200が水平となるように、位置センサ100が搭載された状態で、スライダ410を上下させる。そして、スライダ410は、紐状体200が水平となる状態で、ガイド部材420に手動で固定される。
【0093】
以上のように、本発明の第4実施形態に係るカメラデータ計測装置1Dは、撮影カメラ900が水平に引っ張られるため、撮影カメラ900が高い場所や低い場所から引っ張られることを防止できる。従って、カメラデータ計測装置1Dは、撮影カメラ900の姿勢を安定させて、カメラデータをより高い精度で計測することができる。さらに、カメラデータ計測装置1Dは、カメラマンに対して、高い場所や低い場所から引っ張られる感覚を減少させることができる。
【0094】
(第5実施形態)
[演算装置の構成]
図15,図16を参照して、本発明の第5実施形態に係るカメラデータ計測装置1Eについて、第1実施形態と異なる点を説明する。
カメラデータ計測装置1Eは、撮影カメラ900に固定された支持具500の可動方向によって姿勢データを求める点が第1実施形態と異なる。
【0095】
図15に示すように、姿勢データ計測部310は、パン方向エンコーダ361と、チルト方向エンコーダ363とを備える。
パン方向エンコーダ361は、後記する円筒部520の挟持部に固定され、後記するパン方向軸(不図示)の一端が接続される。そして、パン方向エンコーダ361は、このパン方向軸を介して、支持具500(ジョイント530)のパン方向の回転角を計測する。
チルト方向エンコーダ363は、後記する円筒部510の挟持部に固定され、後記するチルト方向軸(不図示)の一端が接続される。そして、チルト方向エンコーダ363は、このチルト方向軸を介して、支持具500(ジョイント530)のチルト方向の回転角を計測する。
【0096】
支持具500は、円筒部510,520と、ジョイント530と、固定部材540とを備える。
円筒部510は、一方の側が円筒状になっており、紐状体200を円筒内部まで引き込んで固定する。また、円筒部510は、他方の側に、正方形状のジョイント530を左右から挟むように、2つに分かれて延伸された挟持部が形成される。
される。
円筒部520は、一方の側に、ジョイント530を上下から挟むように、2つに分かれて延伸された挟持部が形成される。また、円筒部520は、他方の側が固定部材540に接続される。
ジョイント530は、正方形状であって、円筒部510の挟持部をx軸方向に貫通するチルト方向軸と、円筒部520の挟持部をy軸方向に貫通するパン方向軸とが形成される。そして、ジョイント530は、チルト方向軸及びパン方向軸を介して、円筒部510,520を結合する。
固定部材540は、撮影カメラ900の後部に固定される部材である。
【0097】
このようにして、支持具500は、撮影カメラ900がパン方向及びチルト方向に向き(姿勢)を変えると、紐状体200に対してジョイント530の角度が変化する。このとき、姿勢データ計測部310は、パン方向の回転角とチルト方向の回転角とを計測して、姿勢データとして、CPU350Eに出力する。
【0098】
図16のCPU350Eは、姿勢データ計測部310から姿勢データが入力され、計測データ受信部340から計測データが入力される。そして、CPU350Eは、位置データ算出部351が位置データを算出し、この位置データと姿勢データとを、カメラデータとして出力する。
【0099】
以上のように、本発明の第5実施形態に係るカメラデータ計測装置1Eは、演算装置300Eが、姿勢データ計測部310で計測されたパン方向の回転角とチルト方向の回転角とを、そのまま姿勢データとして出力する。このため、カメラデータ計測装置1Eは、演算装置300Eで姿勢データを算出する必要がなく、演算処理量を低減することができる。
【0100】
なお、第5実施形態では、撮影カメラ900をヨー方向に故意に回転させて撮影することが少ないため、ヨー方向の姿勢を考慮していない。しかし、本発明は、支持具500をヨー方向にも可動する構造とし、ヨー方向の回転角を計測するヨー方向エンコーダを支持具500に固定することで、ヨー方向の姿勢も計測することができる。
【0101】
(第6実施形態)
[カメラデータ計測装置の構成]
図17を参照して、本発明の第6実施形態に係るカメラデータ計測装置1Fの構成について、第1実施形態と異なる点を説明する。
【0102】
カメラデータは、主に、撮影映像の合成に利用されるものである。このため、撮影映像を構成する1枚1枚のフレーム画像ごとに、カメラデータが必要となる。その一方、位置センサ100、ジャイロセンサ320及び加速度センサ330は、撮影映像の合成を意識したものでなく、計測データ、速度データ及び加速度データの計測タイミングが、各フレーム画像に同期していないことが多い。そこで、カメラデータ計測装置1Fは、映像加工処理を確実に行うため、撮影映像の同期信号(垂直同期信号)ごとに、カメラデータを計測する。
【0103】
具体的には、カメラデータ計測装置1Fは、図17に示すように、撮影カメラ900から同期信号が入力される。そして、CPU350Fは、位置センサ100からの計測データと、ジャイロセンサ320からの速度データと、加速度センサ330からの加速度データとを、同期信号が入力されたタイミングでサンプリングする。そして、CPU350Fは、サンプリングした計測データと速度データと加速度データとを用いて、同期信号ごとにカメラデータを計測する。
なお、同期信号を用いる以外、カメラデータ計測装置1Fの各手段は、図4,図7と同様のため、詳細な説明を省略する。
【0104】
以上のように、本発明の第6実施形態に係るカメラデータ計測装置1Fは、計測したカメラデータが各フレーム画像に同期するため、映像加工処理を効率的に行うことができる。
【0105】
なお、第6実施形態では、同期信号ごとにカメラデータを計測する例で説明したが、本発明は、これに限定されない。例えば、カメラデータ計測装置1Fは、位置センサ100、ジャイロセンサ320及び加速度センサ330の計測周波数を、撮影映像の同期信号よりも十分に速い周波数とする。そして、カメラデータ計測装置1Fは、この計測周波数でカメラデータを計測し、各フレーム画像の撮影時間に一致するカメラデータ、又は、この撮影時間に最も近いカメラデータを出力してもよい。
【0106】
(第7実施形態)
[カメラデータ計測装置の構成]
図18,図19を参照して、本発明の第7実施形態に係るカメラデータ計測装置1Gの構成について、第1実施形態と異なる点を説明する。
カメラデータ計測装置1Gは、撮影カメラ900の撮影画角を算出して、カメラデータに付加する点が、第1実施形態と大きく異なる。
【0107】
図18に示すように、撮影カメラ900は、回転リング920を回転させることで、撮影画角を変更可能なズームレンズ910を備える。この撮影カメラ900は、回転リング920にエンコーダ380が取り付けられている。
【0108】
エンコーダ380は、回転リング920のリング回転量を計測するものである。このエンコーダ380は、ケーブル382を介して計測部370に接続されており、計測したリング回転量を計測部370(図19のCPU350G)に出力する。
【0109】
図19に示すように、演算装置300Gは、図4の演算装置300に画角算出部357とエンコーダ380とを追加したものである。
CPU350Gは、位置データ算出部351と、姿勢データ算出部353と、画角算出部357とを備える。ここで、CPU350Gは、速度データと、加速度データと、計測データとに加え、エンコーダ380からリング回転量が入力される。
【0110】
画角算出部357は、リング回転量と、撮影カメラ900の撮影画角とを対応付けた撮影画角テーブルが予め設定され、この撮影画角テーブルを参照して、CPU350Gに入力されたリング回転量から撮影カメラ900の撮影画角を算出するものである。言い換えるなら、画角算出部357は、入力されたリング回転量に対応付けられた撮影カメラ900の撮影画角を、撮影画角テーブルから読み出すことになる。
【0111】
その後、CPU350Gは、画角算出部357が算出した撮影画角を、カメラデータに付加して出力する。
以上のように、本発明の第7実施形態に係るカメラデータ計測装置1Gは、位置データ及び姿勢データに加えて、撮影画角もカメラデータとして計測することができる。
【0112】
なお、第7実施形態において、カメラデータの精度をさらに高くしたい場合、撮影カメラ900のフォーカスリングにもエンコーダを取り付けて、焦点位置による画角の変化を反映させてもよい。
【0113】
なお、第7実施形態では、画角算出部357が撮影画角を算出する例で説明したが、本発明は、これに限定されない。例えば、ズームレンズ内に画角を検出するためのエンコーダが内蔵された撮影カメラの場合、本発明は、デジタルデータとして、ズームレンズのコネクター経由で撮影カメラの画角を取得することもできる。
【0114】
(第8実施形態)
[カメラデータ計測装置の構成]
図20を参照して、本発明の第8実施形態に係るカメラデータ計測装置1Hについて、第1実施形態と異なる点を説明する。
カメラデータ計測装置1Hは、複数の位置センサ100を備え、各位置センサ100を予め設定された配置規則に従って配置した点が第1実施形態と異なる。
【0115】
第8実施形態では、説明を簡易にするため、カメラデータ計測装置1Hが、2個の位置センサ1001,1002を備えることとする。この場合、図20に示すように、カメラデータ計測装置1Hは、位置センサ1001,1002と撮影カメラ900とを、それぞれ、紐状体2001,2002で結ぶ。そして、位置センサ1001,1002は、それぞれ、紐状体2001,2002の紐長変化量ΔLを計測する。
【0116】
図21を参照して、位置センサ1001,1002の配置方法の一例について説明する。
図21の例では、配置規則が、位置センサ1001を撮影カメラ900の進行方向(z軸)の後側に配置し、位置センサ1002を進行方向に直交する注目方向(x軸)に配置されるものとなっている。ここで、進行方向に対して撮影カメラ900が横ずれを起こした場合を考える。この配置規則に従えば、位置センサ1002が横ずれ方向(注目方向)に配置されているため、この横ずれによる紐状体2002の紐長変化量ΔLを、正確に計測できる。従って、カメラデータ計測装置1Hは、位置センサ1002の計測データからカメラデータを求めることで、横ずれに起因するカメラデータの誤差を低減することができる。
【0117】
以上のように、本発明の第8実施形態に係るカメラデータ計測装置1Hは、複数の位置センサ100を備えることで、カメラデータの誤差を減少させ、特に、注目方向のカメラデータを高い精度で計測することができる。
【0118】
なお、第8実施形態では、2個の位置センサ100を進行方向と、進行方向に直交する注目方向とに配置することとしたが、本発明は、これに限定されない。つまり、本発明は、2個以上の位置センサ100を任意の場所に配置でき、各位置センサ100で計測された計測データの何れを利用するか又はこれら計測データを組み合わせるか、任意に設定できる。
【0119】
なお、第2〜8実施形態では、第1実施形態に係るカメラデータ計測装置1への適用例を説明したが、本発明は、これに限定されない。つまり、第2〜8実施形態の手法は、第1実施形態以外、他の実施形態に係るカメラデータ計測装置に適用することもできる。
【0120】
(変形例1)
図22を参照して、本発明の変形例1に係る位置計測装置2について、第1実施形態と異なる点を説明する。
位置計測装置2は、計測対象を撮影カメラ900ではなく、ゲーム機器Gmの操作器930とした点が第1実施形態と異なる。
【0121】
図22に示すように、ゲーム機器Gmは、各種テレビゲームを実行するものであり、接続されたテレビTvにゲーム画面を表示する。また、ゲーム機器Gmは、レバーやボタンが配置された操作器930を備えている。ここで、プレイヤが操作器930のレバーやボタンを操作すると、その操作信号がゲーム機器Gmに送信される。そして、ゲーム機器Gmでは、この操作信号に応じて、例えば、ゲームキャラクタをゲーム画面内で移動させるといった処理を行う。
【0122】
また、プレイヤは、操作器930を傾けたり、前後左右上下に大きく動かして、ゲーム操作を行うこともできる。この場合、位置計測装置2は、操作器930に内蔵された演算装置300によって、操作器930の姿勢データを計測する。
【0123】
具体的には、位置センサ100は、ゲーム機器Gmの正面に配置され、操作器930の計測データを計測して演算装置300に送信する。
演算装置300は、受信した計測データから操作器930の位置データを算出すると共に、ジャイロセンサ320及び加速度センサ330によって、操作器930の姿勢データを計測する。そして、演算装置300は、操作器930の位置データと姿勢データとを、無線ネットワークを介して、ゲーム機器Gmに送信する。
以上のように、本発明の変形例1に係る位置計測装置2は、高い精度でゲーム操作を行うことができる。
【産業上の利用可能性】
【0124】
本発明は、VFX映画等の映画制作や、高度な合成を必要とするドラマ番組、情報番組、迅速なポストプロダクション処理が要求される報道番組等の番組制作に利用することができる。
【0125】
また、本発明は、6自由度の慣性センサとして幅広い分野で利用することができる。
例えば、自動車等の交通手段の位置を知るため、GPS(Global Positioning System)を基本としたナビゲーションステムが活用されている。このGPSでは、交通手段が衛星から遮られる環境下にあるときは測位が不可能になる。これを補うべく、従来の慣性センサで位置計測を行っているが、その精度向上は難しいのが現状である。そこで、本発明は、自動車等の交通手段を計測対象とすれば、その位置計測を高い精度で行うことができる。
この他、本発明は、各種操作器、身体障害者用の車イスや移動ロボットを計測対象として、これらの位置計測にも利用することができる。
【符号の説明】
【0126】
1,1B〜1H カメラデータ計測装置(位置計測装置)
2 位置計測装置
100,100B,100C 位置センサ(紐計測手段)
110 巻取・巻出機構
111 定張力ばね
112 第1プーリ
113 第2プーリ
120,120B 紐長変化量計測部
121 回転量計測部(回転量エンコーダ)
123,123B 紐長変化量算出部
125 フォトデテクタ(パターン検出部)
125a 発光部
125b 受光部
130 紐方向計測部
131 仰角エンコーダ
133 旋回角エンコーダ
140 計測データ送信部(送信部)
150 地磁気センサ(方位検出部)
160 北緯基準旋回角算出部(紐方向変換部)
190 筐体
190A 筐体上部
190B 連結部
190C 筐体下部
191 ベース
192a,192b,192c 軸受
193a,193b,193c 軸
194 支持棒
195 ノズル
196 固定板
200,200B 紐状体
210 NWケーブル
220 無線NW
300,300E〜300G 演算装置(位置データ算出手段)
310 姿勢データ計測部
320 ジャイロセンサ
321 パン方向ジャイロセンサ
323 チルト方向ジャイロセンサ
325 ヨー方向ジャイロセンサ
330 加速度センサ
331 左右方向加速度センサ
333 上下方向加速度センサ
335 前後方向加速度センサ
340 計測データ受信部(受信部)
350,350E〜350G CPU
351 位置データ算出部
353 姿勢データ算出部
361 パン方向エンコーダ
363 チルト方向エンコーダ
370 計測部
380 エンコーダ
390 基板
391 筐体
400 支持機構
410 スライダ
420 ガイド部材
430 ガイドベース
500 支持具
510,520 円筒部
530 ジョイント
540 固定部材
900 撮影カメラ(計測対象)
910 ズームレンズ
920 回転リング
930 操作器(計測対象)
Sys カメラデータ計測システム(位置計測システム)
【特許請求の範囲】
【請求項1】
所定の場所に配置され、移動する計測対象に結ばれた紐状体の紐長変化量と前記紐状体の紐方向とを計測する紐計測手段と、前記紐計測手段で計測された紐長変化量及び紐方向に基づいて、前記計測対象の位置データを算出する位置データ算出手段と、を備える位置計測装置であって、
前記紐計測手段は、
前記紐状体で一定の張力が保たれるように、前記計測対象に結ばれた前記紐状体の巻き取り及び巻き出しを行う巻取・巻出機構と、
前記巻取・巻出機構によって張力が保たれた前記紐状体について、前記計測対象の移動に伴う前記紐長変化量を計測する紐長変化量計測部と、
前記巻取・巻出機構によって張力が保たれた前記紐状体について、前記紐方向を計測する紐方向計測部と、を備え、
前記位置データ算出手段は、
予め設定された紐長初期値と前記紐計測手段で計測された前記紐長変化量との和を前記紐方向での紐全長として求め、求めた前記紐方向での紐全長を3次元方向成分に分解することで、3次元座標系で前記計測対象の位置データを算出する位置データ算出部、を備えることを特徴とする位置計測装置。
【請求項2】
前記巻取・巻出機構は、
前記紐状体の張力を保つ定張力ばねと、
前記紐状体の巻き取り及び巻き出しを行うプーリと、を備え、
前記紐長変化量計測部は、
前記プーリの回転量を計測する回転量計測部と、
予め設定された前記プーリの円周に前記回転量計測部で計測された前記プーリの回転量を乗じることで、前記紐長変化量を算出する紐長変化量算出部と、を備えることを特徴とする請求項1に記載の位置計測装置。
【請求項3】
前記紐状体は、等間隔で長手方向にパターンが形成されており、
前記紐長変化量計測部は、
前記紐状体の巻き取り及び巻き出しに伴う前記パターンの反転変化を検出するパターン検出部と、
前記パターン検出部で検出された前記パターンの反転変化によって、前記紐長変化量を算出する紐長変化量算出部と、を備えることを特徴とする請求項1に記載の位置計測装置。
【請求項4】
前記紐計測手段は、前記計測対象に結ばれた前記紐状体が水平となる高さで当該紐計測手段を支持する支持機構に搭載されたことを特徴とする請求項1から請求項3の何れか一項に記載の位置計測装置。
【請求項5】
前記紐計測手段は、
所定の方位を検出する方位検出部と、
前記紐方向計測部で計測された前記紐方向を、前記方位検出部で検出された方位を基準とした方向に変換する紐方向変換部と、を備えることを特徴とする請求項1から請求項4の何れか一項に記載の位置計測装置。
【請求項6】
前記紐状体は、前記紐長変化量及び前記紐方向を伝送する信号線であり、
前記紐計測手段は、
前記信号線を介して、前記紐長変化量及び前記紐方向を前記位置データ算出手段に送信する送信部、を備え、
前記位置データ算出手段は、
前記計測対象に装着されると共に、前記信号線を介して、前記紐計測手段から記紐長変化量及び前記紐方向を受信する受信部、を備えることを特徴とする請求項1から請求項5の何れか一項に記載の位置計測装置。
【請求項7】
予め設定された配置規則に従って、複数の前記紐計測手段が配置され、
前記複数の紐計測手段は、それぞれ、同一の前記計測対象に結ばれた前記紐状体の紐長変化量を計測することを特徴とする請求項1から請求項6の何れか一項に記載の位置計測装置。
【請求項8】
前記位置データ算出手段は、
パン方向、チルト方向及びヨー方向で前記計測対象の向きを示す姿勢データを計測する姿勢データ計測部、を備えることを特徴とする請求項1から請求項7の何れか一項に記載の位置計測装置。
【請求項9】
前記位置データ算出手段は、前記計測対象としての撮影カメラに装着され、
前記位置データ算出部は、前記撮影カメラが撮影した撮影映像の同期信号が入力され、入力された前記同期信号に同期させて前記計測対象の位置データを算出し、
前記姿勢データ計測部は、前記同期信号が入力され、入力された前記同期信号に同期させて前記計測対象の姿勢データを計測することを特徴とする請求項8に記載の位置計測装置。
【請求項10】
前記位置データ算出手段は、
前記撮影カメラが備えるズームレンズのリング回転量を計測するエンコーダと、
前記リング回転量と前記撮影カメラの画角とを対応付けた撮影画角テーブルが予め設定され、当該撮影画角テーブルを参照して、前記エンコーダが計測したリング回転量から前記撮影カメラの画角を算出する画角算出部と、
を備えることを特徴とする請求項9に記載の位置計測装置。
【請求項11】
請求項1から請求項10の何れか一項に記載の位置計測装置と、
前記計測対象としての撮影カメラと、
を備えることを特徴とする位置計測システム。
【請求項1】
所定の場所に配置され、移動する計測対象に結ばれた紐状体の紐長変化量と前記紐状体の紐方向とを計測する紐計測手段と、前記紐計測手段で計測された紐長変化量及び紐方向に基づいて、前記計測対象の位置データを算出する位置データ算出手段と、を備える位置計測装置であって、
前記紐計測手段は、
前記紐状体で一定の張力が保たれるように、前記計測対象に結ばれた前記紐状体の巻き取り及び巻き出しを行う巻取・巻出機構と、
前記巻取・巻出機構によって張力が保たれた前記紐状体について、前記計測対象の移動に伴う前記紐長変化量を計測する紐長変化量計測部と、
前記巻取・巻出機構によって張力が保たれた前記紐状体について、前記紐方向を計測する紐方向計測部と、を備え、
前記位置データ算出手段は、
予め設定された紐長初期値と前記紐計測手段で計測された前記紐長変化量との和を前記紐方向での紐全長として求め、求めた前記紐方向での紐全長を3次元方向成分に分解することで、3次元座標系で前記計測対象の位置データを算出する位置データ算出部、を備えることを特徴とする位置計測装置。
【請求項2】
前記巻取・巻出機構は、
前記紐状体の張力を保つ定張力ばねと、
前記紐状体の巻き取り及び巻き出しを行うプーリと、を備え、
前記紐長変化量計測部は、
前記プーリの回転量を計測する回転量計測部と、
予め設定された前記プーリの円周に前記回転量計測部で計測された前記プーリの回転量を乗じることで、前記紐長変化量を算出する紐長変化量算出部と、を備えることを特徴とする請求項1に記載の位置計測装置。
【請求項3】
前記紐状体は、等間隔で長手方向にパターンが形成されており、
前記紐長変化量計測部は、
前記紐状体の巻き取り及び巻き出しに伴う前記パターンの反転変化を検出するパターン検出部と、
前記パターン検出部で検出された前記パターンの反転変化によって、前記紐長変化量を算出する紐長変化量算出部と、を備えることを特徴とする請求項1に記載の位置計測装置。
【請求項4】
前記紐計測手段は、前記計測対象に結ばれた前記紐状体が水平となる高さで当該紐計測手段を支持する支持機構に搭載されたことを特徴とする請求項1から請求項3の何れか一項に記載の位置計測装置。
【請求項5】
前記紐計測手段は、
所定の方位を検出する方位検出部と、
前記紐方向計測部で計測された前記紐方向を、前記方位検出部で検出された方位を基準とした方向に変換する紐方向変換部と、を備えることを特徴とする請求項1から請求項4の何れか一項に記載の位置計測装置。
【請求項6】
前記紐状体は、前記紐長変化量及び前記紐方向を伝送する信号線であり、
前記紐計測手段は、
前記信号線を介して、前記紐長変化量及び前記紐方向を前記位置データ算出手段に送信する送信部、を備え、
前記位置データ算出手段は、
前記計測対象に装着されると共に、前記信号線を介して、前記紐計測手段から記紐長変化量及び前記紐方向を受信する受信部、を備えることを特徴とする請求項1から請求項5の何れか一項に記載の位置計測装置。
【請求項7】
予め設定された配置規則に従って、複数の前記紐計測手段が配置され、
前記複数の紐計測手段は、それぞれ、同一の前記計測対象に結ばれた前記紐状体の紐長変化量を計測することを特徴とする請求項1から請求項6の何れか一項に記載の位置計測装置。
【請求項8】
前記位置データ算出手段は、
パン方向、チルト方向及びヨー方向で前記計測対象の向きを示す姿勢データを計測する姿勢データ計測部、を備えることを特徴とする請求項1から請求項7の何れか一項に記載の位置計測装置。
【請求項9】
前記位置データ算出手段は、前記計測対象としての撮影カメラに装着され、
前記位置データ算出部は、前記撮影カメラが撮影した撮影映像の同期信号が入力され、入力された前記同期信号に同期させて前記計測対象の位置データを算出し、
前記姿勢データ計測部は、前記同期信号が入力され、入力された前記同期信号に同期させて前記計測対象の姿勢データを計測することを特徴とする請求項8に記載の位置計測装置。
【請求項10】
前記位置データ算出手段は、
前記撮影カメラが備えるズームレンズのリング回転量を計測するエンコーダと、
前記リング回転量と前記撮影カメラの画角とを対応付けた撮影画角テーブルが予め設定され、当該撮影画角テーブルを参照して、前記エンコーダが計測したリング回転量から前記撮影カメラの画角を算出する画角算出部と、
を備えることを特徴とする請求項9に記載の位置計測装置。
【請求項11】
請求項1から請求項10の何れか一項に記載の位置計測装置と、
前記計測対象としての撮影カメラと、
を備えることを特徴とする位置計測システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2013−92441(P2013−92441A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−234548(P2011−234548)
【出願日】平成23年10月26日(2011.10.26)
【出願人】(000004352)日本放送協会 (2,206)
【出願人】(591053926)財団法人エヌエイチケイエンジニアリングサービス (169)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月26日(2011.10.26)
【出願人】(000004352)日本放送協会 (2,206)
【出願人】(591053926)財団法人エヌエイチケイエンジニアリングサービス (169)
【Fターム(参考)】
[ Back to top ]