
低電力空間結合フェーズドアレイレーダー
【課題】低電力空間結合フェーズドアレイレーダーを提供する。
【解決手段】レーダーシステムが取り付けられるか、又は組み込まれる構造にレーダーシステムを適合させることができるようにする複数の小型レーダーである。レーダーシステムは、クロックと、クロックと通信する複数の周波数変調/持続波(FM/CW)又はパルス圧縮レーダーユニットと、複数のFM/CWレーダーユニットと通信するプロセッサとを備える。複数のFM/CWレーダーユニットはそれぞれ一列のアンテナ素子を含む。
【解決手段】レーダーシステムが取り付けられるか、又は組み込まれる構造にレーダーシステムを適合させることができるようにする複数の小型レーダーである。レーダーシステムは、クロックと、クロックと通信する複数の周波数変調/持続波(FM/CW)又はパルス圧縮レーダーユニットと、複数のFM/CWレーダーユニットと通信するプロセッサとを備える。複数のFM/CWレーダーユニットはそれぞれ一列のアンテナ素子を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、低電力空間結合フェーズドアレイレーダーに関する。
[優先権の主張]
[0001]本出願は2010年2月19日に出願され、参照により本明細書に援用される仮特許出願第61/306,271号に対する優先権を主張する。
【背景技術】
【0002】
[0002]現在のレーダーアプリケーション、詳細には船舶用レーダーは費用がかかるうえに、かなりの重量があり、距離分解能に関して最適ではない。簡単な機械走査式のアレイしか必要としないアプリケーションもあれば、走査された体積を高速に精査するために電子ビームステアリングを必要とするアプリケーションもある。また、これらのアプリケーションは、非常に軽量(数ポンドから数十ポンド)、かつ非常に低い空力抵抗を有する、半球の走査範囲が必要とされる無人航空機(UAV)上等において、極めて大きな走査体積をカバーするのに効果がない。
【発明の概要】
【発明が解決しようとする課題】
【0003】
これまで設計の取り組みから、アクティブフェーズドアレイ(全ての素子が送信、受信、振幅及び位相の制御を自ら行う)は費用がかかるうえに、複雑であり、重くなることがわかっている。また、中央の高出力送信機及び複数のパッシブローパス移相器を備えるパッシブフェーズドアレイは、アクティブフェーズドアレイほど複雑ではなく、数多くの利点を有するものの、配電回路網内の損失を制御するためにあらゆる努力をしているにもかかわらず、送信側及び受信側の両方においてRF伝送損失があるため効率的ではない。
【課題を解決するための手段】
【0004】
[0003]本発明は、1)簡単な固定ビーム;2)コヒーレントな位相同期ループ(PLL)位相シフトによる、素子若しくはサブアレイ間の電子ビームステアリング;並びに/又は3)サンプルのデジタル位相調整及び振幅重み付けによるデジタルビームフォーミングを可能にするレーダーを提供する。デジタルビームフォーミングは、ビームステアリングを可能にし、複数のビームを同時に生成する可能性を与える。
【0005】
[0004]本発明は複数の小型レーダーを含み、それらの小型レーダーによって、レーダーシステムが取り付けられるか、又は組み込まれる構造にレーダーシステムを適合させることができる。船舶、飛行機胴体又は乗物等の任意の曲りによって引き起こされる位相誤差は、分散して配置される各小型レーダーにおいて補正することができる。小型レーダーの物理的な位置によって引き起こされる位相誤差は、ビームステアリングのために必要とされる公称位相シフトに加えて、位相又は周波数オフセットによって補償され、角度オフセットに起因する振幅損失はデジタル振幅乗算器によって補償することができる。
【0006】
[0005]本発明の好ましい実施形態及び代替の実施形態が、添付の図面を参照しながら、以下に詳細に説明される。
【図面の簡単な説明】
【0007】
【図1】[0006]本発明の一実施形態に従って形成されるレーダーシステムのブロック図である。
【図2】[0007]図1に示されるレーダーシステムにおいて用いられる回路設計の概略図である。
【図3】[0008]本発明の代替の実施形態に従って形成されるレーダーシステムのブロック図である。
【図4】[0009]図3に示されるレーダーシステムにおいて用いられる回路設計の概略図である。
【図5−1】[0010]本発明の一実施形態によるレーダーシステムの正面図である。
【図5−2】[0011]図5−1のレーダーシステムの平面図である。
【図5−3】[0012]図5−1のレーダーシステムの背面図である。
【図6】[0013]第1のレーダーシステム例のブロック図である。
【図7】[0014]仰角モノパルス構成を示すブロック図である。
【図8】仰角モノパルス構成を示すブロック図である。
【図9】[0015]先行する図面のいずれかにおいて説明された複数のレーダーシステムを備える乗物の平面図である。
【発明を実施するための形態】
【0008】
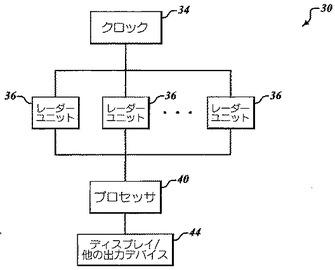
[0016]図1は1つの例示的なレーダーシステム30を示しており、そのレーダーシステムは複数のレーダーユニット(小型周波数変調/持続波(FM/CW)レーダー又は線形FMパルス圧縮レーダー)36を含む。レーダーユニット36はそれぞれマスタータイミング発振器(クロック34)に位相同期する。各レーダーユニット36は、共通のフェーズドアレイ内でパッシブ移相器機能が実行されるように、その送信変調位相を有することができるか、又はFFT処理された受信信号を調整することができる(I&Q FFT出力×複素重み)。また、各レーダーユニット36からの出力電力は、アンテナのアレイにおいて振幅テーパを設定できるように、若しくはビームステアリングを調整できるように、又はその両方が可能であるように調整することができる。
【0009】
[0017]システム30は、各レーダーユニット36に接続されるプロセッサ40と、プロセッサ40と通信するディスプレイ又は他のタイプの出力デバイス44とを含む。各レーダーユニット36内のデジタル位相同期ループの相対的な位相を調整することによって、電子ビームステアリング、電子ビームフォーミング、又はその両方を可能にする。また、レーダーユニット36内に配置されるアンテナにわたり振幅テーパを適用して、低いサイドローブレベルを達成するか、又はデジタルフォーミングにより複数のビームを生成するように、各レーダーユニット36内の送信機の出力レベルを電子プログラミングによって調整することができる。
【0010】
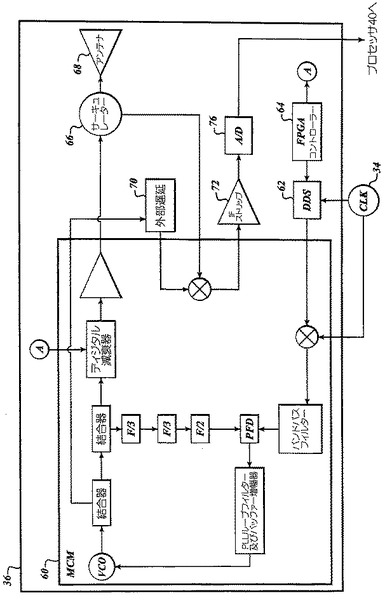
[0018]図2は、レーダーユニット36の細部を示す。レーダーユニット36は、2007年7月3日に発行された米国特許第7,239,266号において記述されるような、パルス圧縮又はFM/CWレーダー構成要素を含むマルチチップモジュール(MCM)60を備えており、その特許は参照により本明細書に援用される。また、レーダーユニット36は、ダイレクトデジタルシンセサイザー(DDS)62と、プログラマブルロジックデバイス(PLD)又はフィールドプログラマブルゲートアレイ(FPGA)コントローラー64と、中間周波数(IF)ストリップ72と、アナログ/デジタル(A/D)コンバーター76と、外部遅延構成要素70と、サーキュレーター66と、アンテナアレイ68(図5−1及び図5−2における素子又はサブアレイ160を参照)とを備える。FPGAコントローラー64は、MCM60内に位置するDDS62及びデジタル減衰器82を制御する。外部遅延構成要素70は、電圧制御発振器(VCO)82によって生成される信号を遅延させ、その信号をMCM60内の第1の混合器84に送信する。MCM60内の第1の混合器84は、外部遅延構成要素70によって遅延した信号と、サーキュレーター66を介して、アンテナアレイ68によって受信された信号とを混合する。第1の混合器84の出力は、IFストリップ72に送信され、IFストリップは信号を増幅し、その信号にハイパスフィルター及び帯域制限ローパスフィルターを適用して、結果として生成された信号をA/Dコンバーター76に送信し、A/Dコンバーターはその信号をデジタル信号に変換して、プロセッサ40に送信する。MCM60は送信信号を生成し、その信号は、サーキュレーター66を介して、アンテナ素子又はサブアレイ68、160によって出力される。クロック34はDDS62、及びMCM60内の第2の混合器86に接続される。第2の混合器86はDDS62の出力をクロック信号に加算して信号を生成し、その信号は、フィルタリング後に、可変周波数基準として位相−周波数検波器(PFD)88に送信される。PFD88は、アップコンバートされたDDS信号を、VCO82の出力からの分周された信号と比較する。2つの信号間の周波数差及び/又は位相差は、位相同期ループ(PLL)フィルター及びバッファー増幅器90に送達するための誤差電圧に変換され、そのバッファー増幅器はVCO82のための制御信号を生成する。位相同期ループバッファー増幅器90又はフィルター内の任意のパッシブ素子の物理的なサイズは、MCMに収容するには大きすぎるので、MCMの外部に追加される場合もある。
【0011】
[0019]FPGAコントローラー64は、所望の変調波形を生成するメモリ及び/又は計算能力を含む。FPGAコントローラー64は、高速シリアル又はパラレルデータバスを介して、DDS62及びデジタル減衰器80に接続される。
【0012】
[0020]アンテナ素子又はサブアレイ68、160は、動作帯域幅全体にわたって非常に低い電圧定在波比(VSWR)(1.2:1未満)を有するレーダー信号を与えるために、レーダーユニット36の他の構成要素と直接集積される。また、レーダーユニット36の位相雑音は、送信周波数から100KHzだけオフセットした周波数において約−100dBc/Hzよりも悪くなることはない。外部遅延構成要素70の出力に起因して、位相雑音は第1の混合器84において相殺される。言い換えると、アンテナ素子又はサブアレイ160の入力ポートから反射されるエネルギーの到着時刻は、局部発振器信号(MCM60内のVCO82によって出力される信号)と概ね同時である。
【0013】
[0021]クロック34の位相雑音は、クロック周波数から100KHz離れた周波数において−145dBc/Hz未満である。クロック34の位相雑音が低いことは、MCM60内のこの位相雑音の任意の乗算が許容できるほど低いままであること、及びマスタークロック34から周波数分周器によって供給されるA/Dクロックが、極めて低いジッタで達成されることを保証し、それにより、最大限の信号対雑音比を保証する。
【0014】
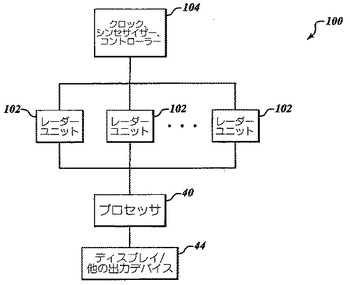
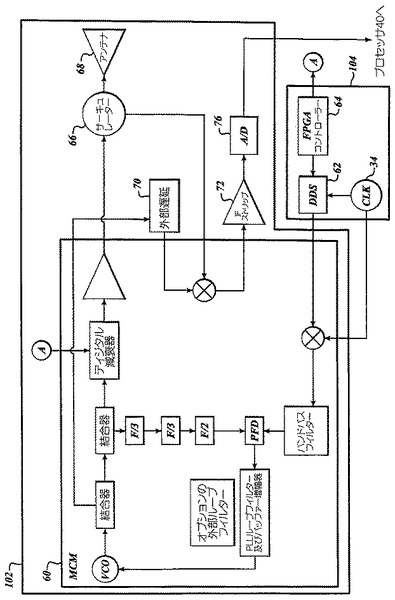
[0022]DDS62は掃引基準周波数を与え、位相雑音を最低限に抑えるために少なくとも12ビットを有するデジタル/アナログ(D/A)コンバーターを含む。図3は、本発明の代替の実施形態に従って形成されるレーダーシステム100を示す。レーダーシステム100は、共通のクロック、シンセサイザー及びコントローラー104に接続される1つ又は複数のレーダーユニット102を含む。レーダーシステム30と同様に、レーダーユニット102はプロセッサ40に接続され、プロセッサ40はさらに、出力デバイス44と通信する。
【0015】
[0023]図4に示されるように、レーダーユニット102はそれぞれ、MCM60と、外部遅延ユニット70と、サーキュレーター66と、アンテナアレイ68と、IFストリップ72と、A/Dコンバーター76とを含む。これらの構成要素の接続は、図2に示されるレーダーユニット36の接続に類似している。クロック、シンセサイザー、コントローラーユニット104は、図2に示されるようなレーダーユニット36に関して記述されたのと同じように接続されるマスタークロック34と、DDS62と、FPGAコントローラー64とを含む。レーダーユニット102は1つのDDS及びFPGAコントローラーを他のレーダーユニット102と共有するので、複数のレーダーユニット102によって生成されるレーダー信号のデジタルステアリングは、上記のレーダーユニット30において可能であるようには実行することができない。この構成は、送信側ビームステアリングは不要であるが、デジタルフォーミングによって生成される複数の受信ビームが必要とされる場合に用いられる。単一の変調及びクロック基準源が単一のビームを生成し、そのビームを図6又は図8において示されるように形成される複数の受信ビームによって部分領域に分割することができる。
【0016】
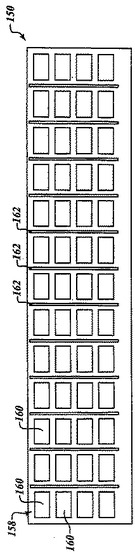
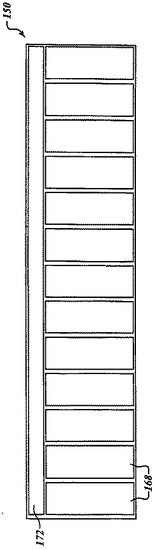
[0024]図5−1、図5−2及び図5−3は、対応する垂直アンテナアレイ158に結合される13個のレーダーユニット168の1つの例示的な配置を示す。この実施形態では、各垂直アンテナアレイ158は、4つのアンテナ素子160(すなわち、マイクロストリップパッチ素子)を含む。垂直アンテナアレイ158は隔離壁162によって分離される。1つの例示的な隔離壁は、垂直アンテナアレイ158間で25〜30dBのアイソレーションを実現するために炭素繊維材料又は同等の材料から形成される。アンテナ素子160及び隔離壁162はアンテナ回路基板164に実装される。
【0017】
[0025]各レーダーユニット168はレーダー回路基板に実装される。レーダー回路基板は、アンテナ回路基板164上の、アンテナ素子と反対側に実装される。レーダーユニット168の上方には、回路構成要素172が配置される。電気トレースが、アンテナ素子160を、アンテナ回路基板164を通して、それぞれのレーダーユニット168又は回路構成要素172に接続する。回路構成要素172は、図1及び図2に示されるように、マスタークロック34を含むか、又は図3及び図4に示されるように、マスタークロック34、DDS162及びFPGAコントローラー164を含む。
【0018】
[0026]複数の送信ビームを同時に形成することもできる。利用可能なアレイ全体のうちの複数のサブセクションを結合して個々のビームを形成することによって、複数の送信ビームが形成される。たとえば、方位角の方向において12個の「小型レーダー」によって給電される12個のアレイ素子が存在する場合には、最も左にある6素子から左側に1つのビームが生成され、残りの半分を用いて右側に別のビームが生成される。関連するモジュールのサブセット毎に1つのビームが個別に形成されるであろう。
【0019】
[0027]ビーム送信は動的品質を担うことができる。たとえば、短時間に、1つのビームが送信され、その後、次の瞬間に2つのビームが個別に送信される。各送信ビームに関連する利用可能な電力は、形成されるビームの数に正比例して減少する。形成することができる受信ビームは、各送信ビームの照射範囲内に存在するように抑制される。したがって、送信ビームの数が多いほど、ビーム幅が大きくなり、そのビーム範囲内で走査できる体積が大きくなる。技術的には、デジタルビームフォーミングは、任意の所望の方向を向くビームを生成することができるが、ステアリングされる方向において送信機電力が放射されない場合には、その方向から目標物電力を受信することはできない。信号が送信されなかった場所を調べるためにステアリングする理由は他にもある。たとえば、最大検出電力の位置を特定することによって妨害物の方向を特定することができるか、または、レーダー以外の発信源からのブロードキャストデータ伝送をリスンすることができる。本発明は、データリンク動作及びレーダー動作を同時に可能にする。
【0020】
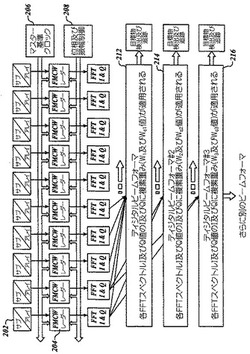
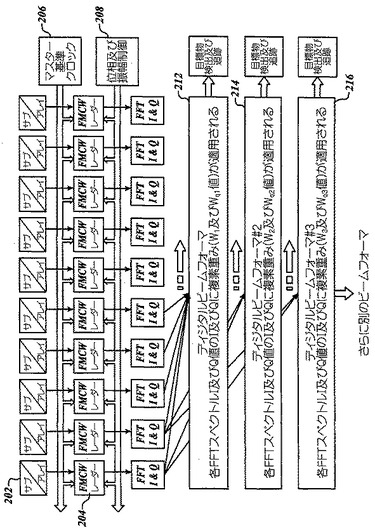
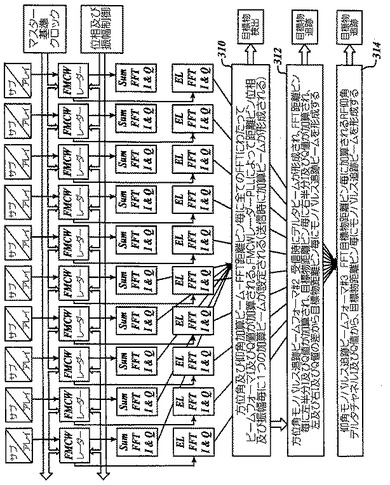
[0028]図6は、上記のアンテナに類似の複数のサブアレイアンテナ202を示しており、それぞれ個別のFM/CW又はパルス圧縮レーダー204に接続され、マスタークロック206が各FM/CW又はパルス圧縮レーダー204にクロック信号を送信する。これは、図3に示されるレーダーシステム100に類似である。図3及び図4において点Aで示されるのと同じように、位相及び振幅コントローラー208(たとえば、DSPコントローラー)が、各FM/CW又はパルス圧縮レーダー204に位相及び振幅制御信号を送信する。FM/CWレーダー204の出力はプロセッサ(たとえば、プロセッサ40)に送信される。プロセッサはFM/CWレーダー204からの受信信号の高速フーリエ変換(FFT)を実行し、スペクトルI及びQ値を生成する。その後、プロセッサは、一回又は数回のデジタルビームフォーミング過程(ブロック212〜216を参照)を実行し、それにより、適切な複素重み及び加算を用いて元のFFT I&Qデータを再利用することによって、ビームを電子的にステアリングする。
【0021】
[0029]直交ベースバンドI及びQ値を用いて、無線信号を実部及び虚部を有する複素ベクトル(フェーザー)として表すことができる。(チャネル中心周波数に対して)正及び負の両方の周波数を以下のように表すことができるように、2つの成分が必要とされる。
【0022】
s(t)=x(t)+jy(t)
ただし、
S(t)は複素ベースバンド信号であり、
x(t)=i(t)は実部であり、
y(t)=−q(t)は虚部であり、
jは(−1)1/2である。
【0023】
[0030]ビームフォーミングのために、複素ベースバンド信号を複素重みと乗算して、アンテナ素子毎に必要とされる位相シフト及び振幅スケーリングを適用する。
wk=akejsin(θk)
wk=akcos(θk)+jaksin(θk)
ただし、
wkは第kのアンテナ素子のための複素重みであり、
akはその重みの相対的な振幅であり、
θkはその重みの位相シフト(すなわち、位相シフト差)であり、θk=360(d/λ)sinθであり、
dはアンテナ素子間の間隔であり、
λは自由空間波長であり、
θは度単位の所望の走査角である。
【0024】
[0031]各素子(k)の振幅重みは所望のテーパ関数によって決定される。アレイにわたって用いられる数多くの振幅テーパがある。簡単な例はペデスタル上の余弦である。ただし、「0」は、1の最大重み+ペデスタルオフセットを有するアレイの中心であり、残りの値はcos(φ)+オフセットペデスタル:Ampk=cos(φ)+ペデスタルオフセットのようにスケーリングされる。
【0025】
[0032]汎用デジタルシグナルプロセッサ(DSP)が、アンテナ素子毎の複素乗算を実施することができる。
sk(t)wk=ak{[xk(t)cos(θk)−yk(t)sin(θk)]+j[xk(t)sin(θk)−yk(t)cos(θk)]}
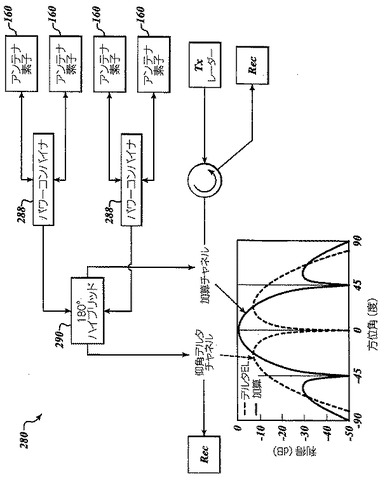
[0033]図7及び図8は、仰角モノパルスを実行し、それにより目標物の仰角をさらに正確に検出できるようにするレーダーシステム280を示す。レーダーシステム280は、サブアレイアンテナと、FM/CW又はパルス圧縮レーダーと、図6に類似のマスタークロックとを含む。レーダーシステム280は、各アンテナ素子アレイ内に配置されるアンテナ素子160の対毎に1つのコンバイナも含む。図7及び図8に示されるシステムは、ELモノパルスを実行することができる。位相及び振幅制御は、小さな各サブアレイ160内に存在しない各隣接サブアレイ列に対して行われる。パワーコンバイナ288の出力は180°ハイブリッド構成要素290に送出され、180°ハイブリッド構成要素は仰角デルタチャネル信号及び加算チャネル信号を生成する。加算チャネル信号はレーダーシステム280のサーキュレーター(たとえば、サーキュレーター66)にも接続される。別の受信機(図示せず)が、仰角デルタチャネルの出力を受信する。加算チャネルは、信号を送信するために、かつ主加算信号を受信するために用いられる。ハイブリッドはレーダーユニット168内に配置される。180°ハイブリッド構成要素290の加算チャネルからの仰角加算ビームの集合を用いて、プロセッサが目標物検出を実行する。また、プロセッサは、受信処理中にデジタルビームフォーミングアルゴリズムによる方位角モノパルス追跡を用いて目標物追跡を実行し、加算チャネル内の信号の位相及び振幅と仰角デルタチャネルの位相及び振幅とを比較することによって仰角モノパルス追跡を実行する。
【0026】
[0034]方位角及び仰角モノパルスビームフォーマアルゴリズムは、仰角モノパルスの場合に、以下のように数学的に表すことができる:(全てのアンテナ素子の上半分の0〜N/2のベクトル和)−(180°だけシフトした素子の下半分のN/2〜Nのベクトル和)。同様に、方位角モノパルス追跡ビームは、アレイの左半分のベクトル和から、180°だけ位相シフトしたアレイ素子の右半分のベクトル和を引くことによって形成される。
【0027】
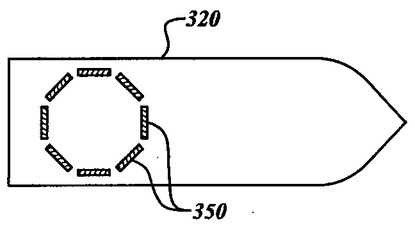
[0035]図9に示されるように、海上で小型ボートを特定する、船内の警護特殊部隊に警報を出す等のために、固定して取り付けられ、上記のようにプロセッサに結合されるいくつかの電子走査式アンテナ350を(海洋用又は陸上用)乗物320の操舵室の周囲に配置して、数フィートの非常に高い距離分解能でパノラマ又は360°走査範囲を提供する。戦闘部隊は、機械的に動かず注意を引かない単純な薄型のアクティブアンテナ構造を容易に見ることはできない。戦闘部隊は、目に見える衛星アンテナ、回転している船舶用レーダーアンテナを狙撃し、破壊しようと試みることが知られている。他の例示的なレーダーアプリケーションには、1)沿岸域における密かな小型船舶操作;2)船舶用レーダー輸送が命じられる(たとえば、欧州及び合衆国の)川、水門及び運河の非常に狭い領域内で用いられる艀レーダー;並びに3)貨物船上での対海賊船の用途が含まれるが、これらには限定されない。
【0028】
[0036]排他的な所有権又は独占権が主張される本発明の実施形態が添付の特許請求の範囲において規定される。
【技術分野】
【0001】
本発明は、低電力空間結合フェーズドアレイレーダーに関する。
[優先権の主張]
[0001]本出願は2010年2月19日に出願され、参照により本明細書に援用される仮特許出願第61/306,271号に対する優先権を主張する。
【背景技術】
【0002】
[0002]現在のレーダーアプリケーション、詳細には船舶用レーダーは費用がかかるうえに、かなりの重量があり、距離分解能に関して最適ではない。簡単な機械走査式のアレイしか必要としないアプリケーションもあれば、走査された体積を高速に精査するために電子ビームステアリングを必要とするアプリケーションもある。また、これらのアプリケーションは、非常に軽量(数ポンドから数十ポンド)、かつ非常に低い空力抵抗を有する、半球の走査範囲が必要とされる無人航空機(UAV)上等において、極めて大きな走査体積をカバーするのに効果がない。
【発明の概要】
【発明が解決しようとする課題】
【0003】
これまで設計の取り組みから、アクティブフェーズドアレイ(全ての素子が送信、受信、振幅及び位相の制御を自ら行う)は費用がかかるうえに、複雑であり、重くなることがわかっている。また、中央の高出力送信機及び複数のパッシブローパス移相器を備えるパッシブフェーズドアレイは、アクティブフェーズドアレイほど複雑ではなく、数多くの利点を有するものの、配電回路網内の損失を制御するためにあらゆる努力をしているにもかかわらず、送信側及び受信側の両方においてRF伝送損失があるため効率的ではない。
【課題を解決するための手段】
【0004】
[0003]本発明は、1)簡単な固定ビーム;2)コヒーレントな位相同期ループ(PLL)位相シフトによる、素子若しくはサブアレイ間の電子ビームステアリング;並びに/又は3)サンプルのデジタル位相調整及び振幅重み付けによるデジタルビームフォーミングを可能にするレーダーを提供する。デジタルビームフォーミングは、ビームステアリングを可能にし、複数のビームを同時に生成する可能性を与える。
【0005】
[0004]本発明は複数の小型レーダーを含み、それらの小型レーダーによって、レーダーシステムが取り付けられるか、又は組み込まれる構造にレーダーシステムを適合させることができる。船舶、飛行機胴体又は乗物等の任意の曲りによって引き起こされる位相誤差は、分散して配置される各小型レーダーにおいて補正することができる。小型レーダーの物理的な位置によって引き起こされる位相誤差は、ビームステアリングのために必要とされる公称位相シフトに加えて、位相又は周波数オフセットによって補償され、角度オフセットに起因する振幅損失はデジタル振幅乗算器によって補償することができる。
【0006】
[0005]本発明の好ましい実施形態及び代替の実施形態が、添付の図面を参照しながら、以下に詳細に説明される。
【図面の簡単な説明】
【0007】
【図1】[0006]本発明の一実施形態に従って形成されるレーダーシステムのブロック図である。
【図2】[0007]図1に示されるレーダーシステムにおいて用いられる回路設計の概略図である。
【図3】[0008]本発明の代替の実施形態に従って形成されるレーダーシステムのブロック図である。
【図4】[0009]図3に示されるレーダーシステムにおいて用いられる回路設計の概略図である。
【図5−1】[0010]本発明の一実施形態によるレーダーシステムの正面図である。
【図5−2】[0011]図5−1のレーダーシステムの平面図である。
【図5−3】[0012]図5−1のレーダーシステムの背面図である。
【図6】[0013]第1のレーダーシステム例のブロック図である。
【図7】[0014]仰角モノパルス構成を示すブロック図である。
【図8】仰角モノパルス構成を示すブロック図である。
【図9】[0015]先行する図面のいずれかにおいて説明された複数のレーダーシステムを備える乗物の平面図である。
【発明を実施するための形態】
【0008】
[0016]図1は1つの例示的なレーダーシステム30を示しており、そのレーダーシステムは複数のレーダーユニット(小型周波数変調/持続波(FM/CW)レーダー又は線形FMパルス圧縮レーダー)36を含む。レーダーユニット36はそれぞれマスタータイミング発振器(クロック34)に位相同期する。各レーダーユニット36は、共通のフェーズドアレイ内でパッシブ移相器機能が実行されるように、その送信変調位相を有することができるか、又はFFT処理された受信信号を調整することができる(I&Q FFT出力×複素重み)。また、各レーダーユニット36からの出力電力は、アンテナのアレイにおいて振幅テーパを設定できるように、若しくはビームステアリングを調整できるように、又はその両方が可能であるように調整することができる。
【0009】
[0017]システム30は、各レーダーユニット36に接続されるプロセッサ40と、プロセッサ40と通信するディスプレイ又は他のタイプの出力デバイス44とを含む。各レーダーユニット36内のデジタル位相同期ループの相対的な位相を調整することによって、電子ビームステアリング、電子ビームフォーミング、又はその両方を可能にする。また、レーダーユニット36内に配置されるアンテナにわたり振幅テーパを適用して、低いサイドローブレベルを達成するか、又はデジタルフォーミングにより複数のビームを生成するように、各レーダーユニット36内の送信機の出力レベルを電子プログラミングによって調整することができる。
【0010】
[0018]図2は、レーダーユニット36の細部を示す。レーダーユニット36は、2007年7月3日に発行された米国特許第7,239,266号において記述されるような、パルス圧縮又はFM/CWレーダー構成要素を含むマルチチップモジュール(MCM)60を備えており、その特許は参照により本明細書に援用される。また、レーダーユニット36は、ダイレクトデジタルシンセサイザー(DDS)62と、プログラマブルロジックデバイス(PLD)又はフィールドプログラマブルゲートアレイ(FPGA)コントローラー64と、中間周波数(IF)ストリップ72と、アナログ/デジタル(A/D)コンバーター76と、外部遅延構成要素70と、サーキュレーター66と、アンテナアレイ68(図5−1及び図5−2における素子又はサブアレイ160を参照)とを備える。FPGAコントローラー64は、MCM60内に位置するDDS62及びデジタル減衰器82を制御する。外部遅延構成要素70は、電圧制御発振器(VCO)82によって生成される信号を遅延させ、その信号をMCM60内の第1の混合器84に送信する。MCM60内の第1の混合器84は、外部遅延構成要素70によって遅延した信号と、サーキュレーター66を介して、アンテナアレイ68によって受信された信号とを混合する。第1の混合器84の出力は、IFストリップ72に送信され、IFストリップは信号を増幅し、その信号にハイパスフィルター及び帯域制限ローパスフィルターを適用して、結果として生成された信号をA/Dコンバーター76に送信し、A/Dコンバーターはその信号をデジタル信号に変換して、プロセッサ40に送信する。MCM60は送信信号を生成し、その信号は、サーキュレーター66を介して、アンテナ素子又はサブアレイ68、160によって出力される。クロック34はDDS62、及びMCM60内の第2の混合器86に接続される。第2の混合器86はDDS62の出力をクロック信号に加算して信号を生成し、その信号は、フィルタリング後に、可変周波数基準として位相−周波数検波器(PFD)88に送信される。PFD88は、アップコンバートされたDDS信号を、VCO82の出力からの分周された信号と比較する。2つの信号間の周波数差及び/又は位相差は、位相同期ループ(PLL)フィルター及びバッファー増幅器90に送達するための誤差電圧に変換され、そのバッファー増幅器はVCO82のための制御信号を生成する。位相同期ループバッファー増幅器90又はフィルター内の任意のパッシブ素子の物理的なサイズは、MCMに収容するには大きすぎるので、MCMの外部に追加される場合もある。
【0011】
[0019]FPGAコントローラー64は、所望の変調波形を生成するメモリ及び/又は計算能力を含む。FPGAコントローラー64は、高速シリアル又はパラレルデータバスを介して、DDS62及びデジタル減衰器80に接続される。
【0012】
[0020]アンテナ素子又はサブアレイ68、160は、動作帯域幅全体にわたって非常に低い電圧定在波比(VSWR)(1.2:1未満)を有するレーダー信号を与えるために、レーダーユニット36の他の構成要素と直接集積される。また、レーダーユニット36の位相雑音は、送信周波数から100KHzだけオフセットした周波数において約−100dBc/Hzよりも悪くなることはない。外部遅延構成要素70の出力に起因して、位相雑音は第1の混合器84において相殺される。言い換えると、アンテナ素子又はサブアレイ160の入力ポートから反射されるエネルギーの到着時刻は、局部発振器信号(MCM60内のVCO82によって出力される信号)と概ね同時である。
【0013】
[0021]クロック34の位相雑音は、クロック周波数から100KHz離れた周波数において−145dBc/Hz未満である。クロック34の位相雑音が低いことは、MCM60内のこの位相雑音の任意の乗算が許容できるほど低いままであること、及びマスタークロック34から周波数分周器によって供給されるA/Dクロックが、極めて低いジッタで達成されることを保証し、それにより、最大限の信号対雑音比を保証する。
【0014】
[0022]DDS62は掃引基準周波数を与え、位相雑音を最低限に抑えるために少なくとも12ビットを有するデジタル/アナログ(D/A)コンバーターを含む。図3は、本発明の代替の実施形態に従って形成されるレーダーシステム100を示す。レーダーシステム100は、共通のクロック、シンセサイザー及びコントローラー104に接続される1つ又は複数のレーダーユニット102を含む。レーダーシステム30と同様に、レーダーユニット102はプロセッサ40に接続され、プロセッサ40はさらに、出力デバイス44と通信する。
【0015】
[0023]図4に示されるように、レーダーユニット102はそれぞれ、MCM60と、外部遅延ユニット70と、サーキュレーター66と、アンテナアレイ68と、IFストリップ72と、A/Dコンバーター76とを含む。これらの構成要素の接続は、図2に示されるレーダーユニット36の接続に類似している。クロック、シンセサイザー、コントローラーユニット104は、図2に示されるようなレーダーユニット36に関して記述されたのと同じように接続されるマスタークロック34と、DDS62と、FPGAコントローラー64とを含む。レーダーユニット102は1つのDDS及びFPGAコントローラーを他のレーダーユニット102と共有するので、複数のレーダーユニット102によって生成されるレーダー信号のデジタルステアリングは、上記のレーダーユニット30において可能であるようには実行することができない。この構成は、送信側ビームステアリングは不要であるが、デジタルフォーミングによって生成される複数の受信ビームが必要とされる場合に用いられる。単一の変調及びクロック基準源が単一のビームを生成し、そのビームを図6又は図8において示されるように形成される複数の受信ビームによって部分領域に分割することができる。
【0016】
[0024]図5−1、図5−2及び図5−3は、対応する垂直アンテナアレイ158に結合される13個のレーダーユニット168の1つの例示的な配置を示す。この実施形態では、各垂直アンテナアレイ158は、4つのアンテナ素子160(すなわち、マイクロストリップパッチ素子)を含む。垂直アンテナアレイ158は隔離壁162によって分離される。1つの例示的な隔離壁は、垂直アンテナアレイ158間で25〜30dBのアイソレーションを実現するために炭素繊維材料又は同等の材料から形成される。アンテナ素子160及び隔離壁162はアンテナ回路基板164に実装される。
【0017】
[0025]各レーダーユニット168はレーダー回路基板に実装される。レーダー回路基板は、アンテナ回路基板164上の、アンテナ素子と反対側に実装される。レーダーユニット168の上方には、回路構成要素172が配置される。電気トレースが、アンテナ素子160を、アンテナ回路基板164を通して、それぞれのレーダーユニット168又は回路構成要素172に接続する。回路構成要素172は、図1及び図2に示されるように、マスタークロック34を含むか、又は図3及び図4に示されるように、マスタークロック34、DDS162及びFPGAコントローラー164を含む。
【0018】
[0026]複数の送信ビームを同時に形成することもできる。利用可能なアレイ全体のうちの複数のサブセクションを結合して個々のビームを形成することによって、複数の送信ビームが形成される。たとえば、方位角の方向において12個の「小型レーダー」によって給電される12個のアレイ素子が存在する場合には、最も左にある6素子から左側に1つのビームが生成され、残りの半分を用いて右側に別のビームが生成される。関連するモジュールのサブセット毎に1つのビームが個別に形成されるであろう。
【0019】
[0027]ビーム送信は動的品質を担うことができる。たとえば、短時間に、1つのビームが送信され、その後、次の瞬間に2つのビームが個別に送信される。各送信ビームに関連する利用可能な電力は、形成されるビームの数に正比例して減少する。形成することができる受信ビームは、各送信ビームの照射範囲内に存在するように抑制される。したがって、送信ビームの数が多いほど、ビーム幅が大きくなり、そのビーム範囲内で走査できる体積が大きくなる。技術的には、デジタルビームフォーミングは、任意の所望の方向を向くビームを生成することができるが、ステアリングされる方向において送信機電力が放射されない場合には、その方向から目標物電力を受信することはできない。信号が送信されなかった場所を調べるためにステアリングする理由は他にもある。たとえば、最大検出電力の位置を特定することによって妨害物の方向を特定することができるか、または、レーダー以外の発信源からのブロードキャストデータ伝送をリスンすることができる。本発明は、データリンク動作及びレーダー動作を同時に可能にする。
【0020】
[0028]図6は、上記のアンテナに類似の複数のサブアレイアンテナ202を示しており、それぞれ個別のFM/CW又はパルス圧縮レーダー204に接続され、マスタークロック206が各FM/CW又はパルス圧縮レーダー204にクロック信号を送信する。これは、図3に示されるレーダーシステム100に類似である。図3及び図4において点Aで示されるのと同じように、位相及び振幅コントローラー208(たとえば、DSPコントローラー)が、各FM/CW又はパルス圧縮レーダー204に位相及び振幅制御信号を送信する。FM/CWレーダー204の出力はプロセッサ(たとえば、プロセッサ40)に送信される。プロセッサはFM/CWレーダー204からの受信信号の高速フーリエ変換(FFT)を実行し、スペクトルI及びQ値を生成する。その後、プロセッサは、一回又は数回のデジタルビームフォーミング過程(ブロック212〜216を参照)を実行し、それにより、適切な複素重み及び加算を用いて元のFFT I&Qデータを再利用することによって、ビームを電子的にステアリングする。
【0021】
[0029]直交ベースバンドI及びQ値を用いて、無線信号を実部及び虚部を有する複素ベクトル(フェーザー)として表すことができる。(チャネル中心周波数に対して)正及び負の両方の周波数を以下のように表すことができるように、2つの成分が必要とされる。
【0022】
s(t)=x(t)+jy(t)
ただし、
S(t)は複素ベースバンド信号であり、
x(t)=i(t)は実部であり、
y(t)=−q(t)は虚部であり、
jは(−1)1/2である。
【0023】
[0030]ビームフォーミングのために、複素ベースバンド信号を複素重みと乗算して、アンテナ素子毎に必要とされる位相シフト及び振幅スケーリングを適用する。
wk=akejsin(θk)
wk=akcos(θk)+jaksin(θk)
ただし、
wkは第kのアンテナ素子のための複素重みであり、
akはその重みの相対的な振幅であり、
θkはその重みの位相シフト(すなわち、位相シフト差)であり、θk=360(d/λ)sinθであり、
dはアンテナ素子間の間隔であり、
λは自由空間波長であり、
θは度単位の所望の走査角である。
【0024】
[0031]各素子(k)の振幅重みは所望のテーパ関数によって決定される。アレイにわたって用いられる数多くの振幅テーパがある。簡単な例はペデスタル上の余弦である。ただし、「0」は、1の最大重み+ペデスタルオフセットを有するアレイの中心であり、残りの値はcos(φ)+オフセットペデスタル:Ampk=cos(φ)+ペデスタルオフセットのようにスケーリングされる。
【0025】
[0032]汎用デジタルシグナルプロセッサ(DSP)が、アンテナ素子毎の複素乗算を実施することができる。
sk(t)wk=ak{[xk(t)cos(θk)−yk(t)sin(θk)]+j[xk(t)sin(θk)−yk(t)cos(θk)]}
[0033]図7及び図8は、仰角モノパルスを実行し、それにより目標物の仰角をさらに正確に検出できるようにするレーダーシステム280を示す。レーダーシステム280は、サブアレイアンテナと、FM/CW又はパルス圧縮レーダーと、図6に類似のマスタークロックとを含む。レーダーシステム280は、各アンテナ素子アレイ内に配置されるアンテナ素子160の対毎に1つのコンバイナも含む。図7及び図8に示されるシステムは、ELモノパルスを実行することができる。位相及び振幅制御は、小さな各サブアレイ160内に存在しない各隣接サブアレイ列に対して行われる。パワーコンバイナ288の出力は180°ハイブリッド構成要素290に送出され、180°ハイブリッド構成要素は仰角デルタチャネル信号及び加算チャネル信号を生成する。加算チャネル信号はレーダーシステム280のサーキュレーター(たとえば、サーキュレーター66)にも接続される。別の受信機(図示せず)が、仰角デルタチャネルの出力を受信する。加算チャネルは、信号を送信するために、かつ主加算信号を受信するために用いられる。ハイブリッドはレーダーユニット168内に配置される。180°ハイブリッド構成要素290の加算チャネルからの仰角加算ビームの集合を用いて、プロセッサが目標物検出を実行する。また、プロセッサは、受信処理中にデジタルビームフォーミングアルゴリズムによる方位角モノパルス追跡を用いて目標物追跡を実行し、加算チャネル内の信号の位相及び振幅と仰角デルタチャネルの位相及び振幅とを比較することによって仰角モノパルス追跡を実行する。
【0026】
[0034]方位角及び仰角モノパルスビームフォーマアルゴリズムは、仰角モノパルスの場合に、以下のように数学的に表すことができる:(全てのアンテナ素子の上半分の0〜N/2のベクトル和)−(180°だけシフトした素子の下半分のN/2〜Nのベクトル和)。同様に、方位角モノパルス追跡ビームは、アレイの左半分のベクトル和から、180°だけ位相シフトしたアレイ素子の右半分のベクトル和を引くことによって形成される。
【0027】
[0035]図9に示されるように、海上で小型ボートを特定する、船内の警護特殊部隊に警報を出す等のために、固定して取り付けられ、上記のようにプロセッサに結合されるいくつかの電子走査式アンテナ350を(海洋用又は陸上用)乗物320の操舵室の周囲に配置して、数フィートの非常に高い距離分解能でパノラマ又は360°走査範囲を提供する。戦闘部隊は、機械的に動かず注意を引かない単純な薄型のアクティブアンテナ構造を容易に見ることはできない。戦闘部隊は、目に見える衛星アンテナ、回転している船舶用レーダーアンテナを狙撃し、破壊しようと試みることが知られている。他の例示的なレーダーアプリケーションには、1)沿岸域における密かな小型船舶操作;2)船舶用レーダー輸送が命じられる(たとえば、欧州及び合衆国の)川、水門及び運河の非常に狭い領域内で用いられる艀レーダー;並びに3)貨物船上での対海賊船の用途が含まれるが、これらには限定されない。
【0028】
[0036]排他的な所有権又は独占権が主張される本発明の実施形態が添付の特許請求の範囲において規定される。
【特許請求の範囲】
【請求項1】
レーダーシステムであって、
クロック(34)と、
前記クロックと信号通信する複数の周波数変調/持続波(FM/CW)レーダーユニット又はパルス圧縮レーダーユニット(36)の一方または双方と、
前記複数のFM/CWレーダーユニットと信号通信するプロセッサ(40)とを備え、
前記複数の周波数変調/持続波(FM/CW)レーダーユニット又はパルス圧縮レーダーユニットはそれぞれ同じ平面に沿って実装されるアンテナ素子の列を備え、
前記レーダーシステムは送信及び受信のために電気的にステアリングすることができ、
前記アンテナ素子はマイクロストリップ素子を含む、レーダーシステム。
【請求項2】
前記レーダーユニットのうちの少なくとも1つは仰角モノパルスユニットとして動作するように構成され、前記少なくとも1つのレーダーユニットは、
少なくとも1つの第1のアンテナ素子と、
少なくとも1つの第2のアンテナ素子であって、前記第1のアンテナ素子は該第2のアンテナ素子から垂直方向に分離される、少なくとも1つの第2のアンテナ素子と、
前記第1のアンテナ素子及び前記第2のアンテナ素子から受信される信号を加算し、かつ前記第1のアンテナ素子及び前記第2のアンテナ素子から受信される前記信号の差を求めるように構成されるハイブリッドユニットとを備え、
前記プロセッサは前記ハイブリッドユニットと信号通信し、前記プロセッサは、前記ハイブリッドユニットから受信される信号に基づいて目標物の仰角を特定するようにさらに構成され、
前記複数の周波数変調/持続波(FM/CW)レーダーユニット又はパルス圧縮レーダーユニットはそれぞれ、前記アンテナ素子を収容するように構成されるアンテナ回路基板と、前記アンテナ素子の各行間に配置される複数の隔離壁とを備え、前記クロック及び前記複数のFM/CWレーダーユニットは該アンテナ回路基板の第2の側に実装され、
前記FM/CWレーダーユニット又はパルス圧縮レーダーユニットは、
発振器と、
前記発振器の出力からフィードバックされる信号及び制御信号に基づいて、前記発振器を制御するように構成される位相同期ループ(PLL)とを備え、
前記ユニットはコントローラーを含むか、又はコントローラーが前記レーダーユニットと信号通信し、該コントローラーは前記アンテナ回路基板の前記第2の側に配置され、
前記コントローラーはダイレクトデジタルシンセサイザーと、メモリを有するプロセッサとを備え、
前記プロセッサは任意の方向において1つ又は複数のビームをデジタル処理で形成するように構成される、請求項1に記載のシステム。
【請求項3】
単一のクロック信号を生成するステップと、
前記生成されたクロック信号を複数の周波数変調/持続波(FM/CW)レーダーユニット又はパルス圧縮レーダーユニットに送るステップであって、該レーダーユニットはそれぞれ2つ以上のアンテナ素子からなる列を含み、該アンテナ素子の該列は同じ平面に沿って実装される、送るステップと、
処理デバイスにおいて少なくとも1つの制御信号を生成するステップと、
前記少なくとも1つの制御信号に基づいて前記FM/CWレーダーユニット又はパルス圧縮レーダーユニットからレーダー信号を送信するステップと、
前記FM/CWレーダーユニット又はパルス圧縮レーダーユニットにおいてレーダー反射信号を受信するステップと、
前記レーダー反射信号を、前記複数のFM/CWレーダーユニット又はパルス圧縮レーダーユニットと信号通信するプロセッサに送るステップと
を含み、
前記送信するステップは、前記制御信号に基づいて前記レーダー信号を電気的にステアリングするステップを含み、前記受信するステップは、前記アンテナ素子が観測している場所を電気的にステアリングするステップを含み、
前記送信するステップは、前記制御信号に基づいて前記レーダー信号を垂直方向にステアリングするステップを含み、前記垂直方向にステアリングするステップは、
前記レーダーユニットのうちの少なくとも1つのレーダーユニット内の1つ又は複数のアンテナ素子の第1のサブアレイにおいて信号を受信するステップと、
前記少なくとも1つのレーダーユニット内の1つ又は複数のアンテナ素子の第2のサブアレイにおいて信号を受信するステップであって、前記第1のアンテナ素子は該第2のアンテナ素子から垂直方向に分離される、受信するステップと、
前記第1のサブアレイ及び前記第2のサブアレイから受信される信号を加算するステップと、
前記第1のサブアレイ及び前記第2のサブアレイから受信される信号を減算するステップと、
前記加算された信号及び差信号に基づいて目標物の仰角を特定するステップと、
を含む、方法。
【請求項1】
レーダーシステムであって、
クロック(34)と、
前記クロックと信号通信する複数の周波数変調/持続波(FM/CW)レーダーユニット又はパルス圧縮レーダーユニット(36)の一方または双方と、
前記複数のFM/CWレーダーユニットと信号通信するプロセッサ(40)とを備え、
前記複数の周波数変調/持続波(FM/CW)レーダーユニット又はパルス圧縮レーダーユニットはそれぞれ同じ平面に沿って実装されるアンテナ素子の列を備え、
前記レーダーシステムは送信及び受信のために電気的にステアリングすることができ、
前記アンテナ素子はマイクロストリップ素子を含む、レーダーシステム。
【請求項2】
前記レーダーユニットのうちの少なくとも1つは仰角モノパルスユニットとして動作するように構成され、前記少なくとも1つのレーダーユニットは、
少なくとも1つの第1のアンテナ素子と、
少なくとも1つの第2のアンテナ素子であって、前記第1のアンテナ素子は該第2のアンテナ素子から垂直方向に分離される、少なくとも1つの第2のアンテナ素子と、
前記第1のアンテナ素子及び前記第2のアンテナ素子から受信される信号を加算し、かつ前記第1のアンテナ素子及び前記第2のアンテナ素子から受信される前記信号の差を求めるように構成されるハイブリッドユニットとを備え、
前記プロセッサは前記ハイブリッドユニットと信号通信し、前記プロセッサは、前記ハイブリッドユニットから受信される信号に基づいて目標物の仰角を特定するようにさらに構成され、
前記複数の周波数変調/持続波(FM/CW)レーダーユニット又はパルス圧縮レーダーユニットはそれぞれ、前記アンテナ素子を収容するように構成されるアンテナ回路基板と、前記アンテナ素子の各行間に配置される複数の隔離壁とを備え、前記クロック及び前記複数のFM/CWレーダーユニットは該アンテナ回路基板の第2の側に実装され、
前記FM/CWレーダーユニット又はパルス圧縮レーダーユニットは、
発振器と、
前記発振器の出力からフィードバックされる信号及び制御信号に基づいて、前記発振器を制御するように構成される位相同期ループ(PLL)とを備え、
前記ユニットはコントローラーを含むか、又はコントローラーが前記レーダーユニットと信号通信し、該コントローラーは前記アンテナ回路基板の前記第2の側に配置され、
前記コントローラーはダイレクトデジタルシンセサイザーと、メモリを有するプロセッサとを備え、
前記プロセッサは任意の方向において1つ又は複数のビームをデジタル処理で形成するように構成される、請求項1に記載のシステム。
【請求項3】
単一のクロック信号を生成するステップと、
前記生成されたクロック信号を複数の周波数変調/持続波(FM/CW)レーダーユニット又はパルス圧縮レーダーユニットに送るステップであって、該レーダーユニットはそれぞれ2つ以上のアンテナ素子からなる列を含み、該アンテナ素子の該列は同じ平面に沿って実装される、送るステップと、
処理デバイスにおいて少なくとも1つの制御信号を生成するステップと、
前記少なくとも1つの制御信号に基づいて前記FM/CWレーダーユニット又はパルス圧縮レーダーユニットからレーダー信号を送信するステップと、
前記FM/CWレーダーユニット又はパルス圧縮レーダーユニットにおいてレーダー反射信号を受信するステップと、
前記レーダー反射信号を、前記複数のFM/CWレーダーユニット又はパルス圧縮レーダーユニットと信号通信するプロセッサに送るステップと
を含み、
前記送信するステップは、前記制御信号に基づいて前記レーダー信号を電気的にステアリングするステップを含み、前記受信するステップは、前記アンテナ素子が観測している場所を電気的にステアリングするステップを含み、
前記送信するステップは、前記制御信号に基づいて前記レーダー信号を垂直方向にステアリングするステップを含み、前記垂直方向にステアリングするステップは、
前記レーダーユニットのうちの少なくとも1つのレーダーユニット内の1つ又は複数のアンテナ素子の第1のサブアレイにおいて信号を受信するステップと、
前記少なくとも1つのレーダーユニット内の1つ又は複数のアンテナ素子の第2のサブアレイにおいて信号を受信するステップであって、前記第1のアンテナ素子は該第2のアンテナ素子から垂直方向に分離される、受信するステップと、
前記第1のサブアレイ及び前記第2のサブアレイから受信される信号を加算するステップと、
前記第1のサブアレイ及び前記第2のサブアレイから受信される信号を減算するステップと、
前記加算された信号及び差信号に基づいて目標物の仰角を特定するステップと、
を含む、方法。
【図1】


【図2】
【図3】
【図4】
【図5−1】
【図5−2】

【図5−3】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5−1】
【図5−2】
【図5−3】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−191293(P2011−191293A)
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【外国語出願】
【出願番号】特願2011−31043(P2011−31043)
【出願日】平成23年2月16日(2011.2.16)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願番号】特願2011−31043(P2011−31043)
【出願日】平成23年2月16日(2011.2.16)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
[ Back to top ]