
体位固定装置
【課題】上肢の支持面の高さ、傾斜角度の調整を簡便に行うことができ、上肢の全体を確実に固定できる廉価な体位固定装置を提案すること。
【解決手段】体位固定装置1は、基板2の上面2aにおいて、左右対称の位置に配置された左腕載せ台4、右腕載せ台5および左手握り棒6、右手握り棒7を有している。左腕載せ台4、右腕載せ台5の間における基板後側の位置に、左手握り棒6、右手握り棒7が配置されている。左腕載せ台4、右腕載せ台5は、前腕および上腕を載せるための平坦な腕載置面11を備え、この腕載置面11の傾斜角度、高さ、基板幅方向Xの間隔を変えることが可能である。左手握り棒6、右手握り棒7の基板幅方向Xの間隔、基板前後方向Yの位置を変えることが可能である。
【解決手段】体位固定装置1は、基板2の上面2aにおいて、左右対称の位置に配置された左腕載せ台4、右腕載せ台5および左手握り棒6、右手握り棒7を有している。左腕載せ台4、右腕載せ台5の間における基板後側の位置に、左手握り棒6、右手握り棒7が配置されている。左腕載せ台4、右腕載せ台5は、前腕および上腕を載せるための平坦な腕載置面11を備え、この腕載置面11の傾斜角度、高さ、基板幅方向Xの間隔を変えることが可能である。左手握り棒6、右手握り棒7の基板幅方向Xの間隔、基板前後方向Yの位置を変えることが可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、診断、治療あるいは検査用の台の上において挙上位の状態で患者あるいは被験者の体位を固定するために用いる体位固定装置に関する。
【背景技術】
【0002】
放射線治療などにおいては、放射線照射中に患者の体動を拘束するために体位固定装置を用いて患者を治療台に固定している。体位固定装置は、患者に対する放射線照射位置精度の向上、照射位置再現性の向上のためにも不可欠である。非特許文献1には、このような放射線治療用固定装置である乳房用固定具(マンマ用固定プレートESF−17)が掲載されている。
【0003】
この非特許文献1に掲載されている乳房用固定具は、矩形の基板の上面中央部分が頭部を載せる部位となっている。また、基板における頭部を載せる部位の両側には、前側に左右一対のアームホルダーが配置され、後側に左右一対のリストホルダーが配置されている。各リストホルダーの後側には水平にグリップが配置されている。これらのアームホルダー、リストホルダーは湾曲状のアーム支持面、凹状のリスト支持面を備えており、これらの支持面位置の高さ、および傾斜角度を調整できるようになっている。
【0004】
放射線治療台の上に乳房用固定具を載せ、患者の頭部を基板の中央の部位に載せ、患者の左右の上肢を上腕支持台および前腕支持台に載せ、左右の手でグリップを握らせることにより、患者を挙上位の状態で固定することができる。この結果、乳房接線照射などの放射線治療において、精度良く患者を固定でき、繰り返しの治療において同一位置に患者を精度よく固定でき、再現性にも優れている。また、アームホルダーとリストホルダーの高さ、角度を調整することにより患者の上肢を任意の角度に固定でき、患者の体位を安定させることができる。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】“乳房用固定具、ESFORM製品紹介、放射線治療用固定システム「エスフォーム」”、エンジニアリングシステム株式会社、[2011年9月29日検索]、インターネット<URL:http://esform.com/products/mamma/index.html>
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来の放射線治療等に用いる体位固定装置は、上記の非特許文献1に掲載されているように、左右の上肢のそれぞれを、複数の支持台を用いて支持し、各支持台の高さ、傾斜角度を調整することにより、様々な体形に対応でき、自由度が高いという利点がある。また、各支持台の支持面は湾曲状、凹状をしており、上肢を安定的に支持できるという利点がある。
【0007】
しかしながら、左右のそれぞれにおいて、上腕部分および前腕部分を支持しているアームホルダーおよびリストホルダー並びにグリップの調整を行う必要があり、これらの部分を患者の体形に合わせて調整する作業が煩雑であり、慣れていないと調整に時間が掛かる。また、各ホルダーは湾曲状あるいは凹状の支持面となっており、患者によっては、これらに載せた上肢の部分が支持面にフィットせずに違和感を覚えることがある。さらに、上肢の上腕部分の一部および前腕部分の手首部分がスポット的に支持されているので、上腕における支持されている間の部分が動いてしまうことがある。
【0008】
本発明の課題は、このような点に鑑みて、患者の体形に適合するように上腕の支持面の高さおよび傾斜角度を調整する作業を簡便に行うことができ、上肢の全体を確実に固定することのできる廉価な構成の体位固定装置を提案することにある。
【課題を解決するための手段】
【0009】
上記の課題を解決するために、本発明は、診断、治療あるいは検査用の台の上において挙上位の状態で患者あるいは被験者の体位を固定するために用いる体位固定装置において、
基板と、
前記基板の上面において左右対称の位置に配置された左腕載せ台および右腕載せ台と、
前記基板の上面において左右対称の位置に配置された左手握り棒および右手握り棒とを有しており、
前記左腕載せ台および前記右腕載せ台の間における基板後側の位置に、前記左手握り棒および前記右手握り棒が配置されており、
前記左腕載せ台および前記右腕載せ台のそれぞれは、前腕および上腕を載せるための平坦な腕載置面を備えており、
前記左腕載せ台および前記右腕載せ台のそれぞれは、前記基板に対する前記腕載置面の傾斜角度および高さを変更可能であることを特徴としている。
【0010】
本発明では、左右の上肢のそれぞれに対して、前腕および上腕を同一の平坦な腕載置面によって支持している。腕載置面を平坦な面とすることにより、単一の腕載置面によって各腕の全体を支持することができる。また、患者等の体形に合うように単一の腕載せ台(左腕載せ台、右腕載せ台)を調整するだけでよいので、簡便且つ短時間で、適切に上肢を固定するための調整が可能になる。さらに、従来の装置に比べて部品点数を少なくでき、しかも、平坦な腕載置面を備えた腕載せ台は湾曲状あるいは凹状の面を備えた台に比べて生産性に優れているので、従来の装置に比べて製造コストを下げることができる。
【0011】
ここで、患者、被験者の様々な体形への適合性を高めるために、左腕載せ台および右腕載せ台のそれぞれが、基板に平行な方向において腕載置面の基板に対する相対位置を変更可能となっていることが望ましい。
【0012】
また、同一の平坦な腕載置面上において挙上位をとった場合に、まれに、上肢の前腕の部分の位置が腕載置面上において定まらない場合があり、その原因は、手の位置が定まらない場合が殆どである。よって、左手握り棒および右手握り棒のそれぞれの基板に対する位置を、基板幅方向および前後方向に変更できるようにしておき、このような場合に対処できるようにしておくことが望ましい。
【0013】
さらに、頭部位置を確実に固定するためには、基板の上面に、頭部を載せるための頭部支持台を取り付けておけばよい。
【0014】
なお、うつ伏せ状態で体位固定する場合には、左右の腕載せ台を基板から取り外して、基板と、左手握り棒および右手握り棒のみを用いればよい。
【0015】
また、腕載置面の高さ、傾斜角度の変更は、腕載せ台を基板に平行な旋回中心軸線回りに旋回させることにより簡単に実現することができる。
【0016】
さらに、基板、左右の腕載せ台、頭部支持台を、X線の透過性に優れたポリエチレン発泡体から形成することが望ましい。
【発明の効果】
【0017】
本発明の体位固定装置によれば、左右の上肢の前腕部分および上腕部分を、平坦な同一の腕載置面によって支持することで、患者の体形に合わせて上肢を確実に固定するために腕載置面の高さ、傾斜角度等を調整する作業を簡単かつ短時間で行うことができる。また、上肢を支持する腕載置面を三次元的に傾斜角度、高さ位置、基板前後左右方向の位置を変更できるようにし、グリップの基板前後左右方向の位置を変更できるようにすることで、様々な患者の体形に対応可能な汎用性の高い体位固定装置を実現できる。
【0018】
さらには、各上肢を固定するために単一の腕載せ台のみを使用しているので部品点数を少なくできる。また、上肢を載せるための面は平坦な面であるので、腕載せ台は、湾曲状、凹状の面を備えた従来の台を製作する場合に比べて生産性に優れている。したがって、体位固定装置の製造コストの低減化に有利である。
【図面の簡単な説明】
【0019】
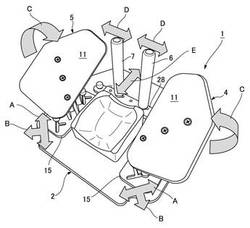
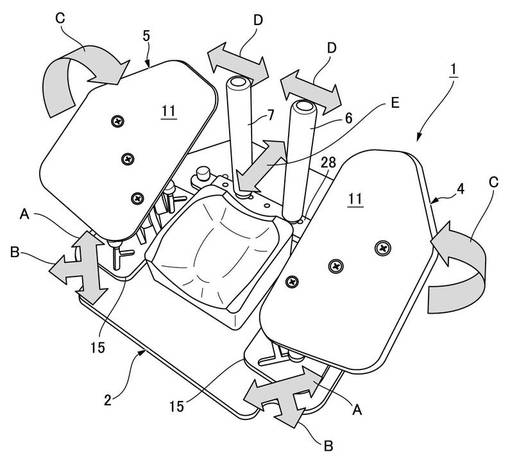
【図1】本発明を適用した実施の形態に係る放射線治療用の体位固定装置の斜視図である。
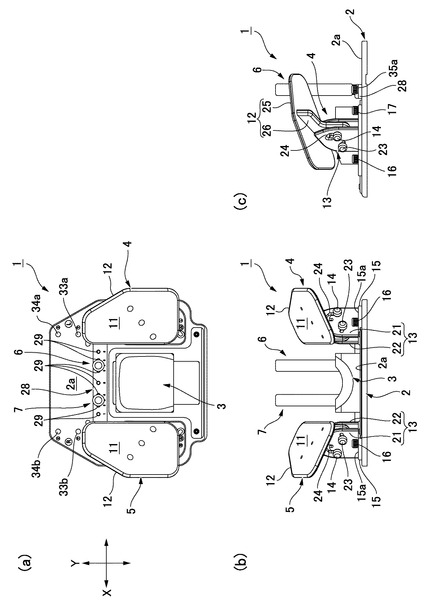
【図2】(a)は図1の体位固定装置の平面図、(b)は正面図、(c)は側面図である。
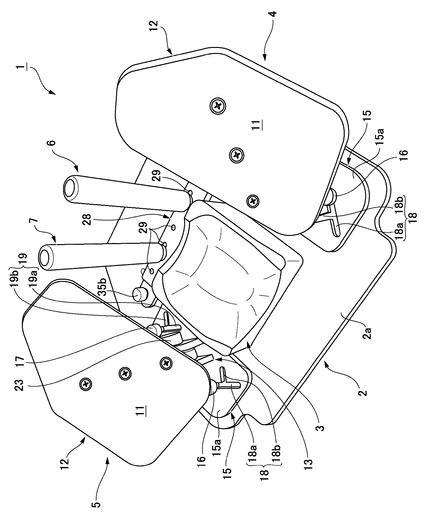
【図3】図1の体位固定装置における各部の位置調整方法および角度調整方法を示す説明図である。
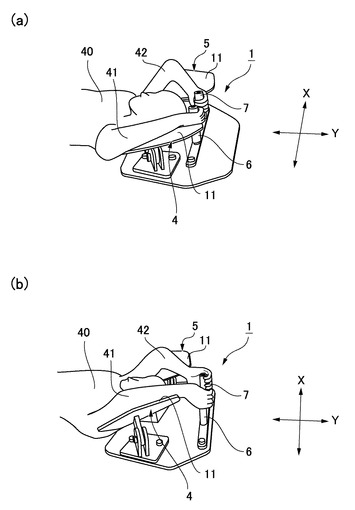
【図4】(a)および(b)は図1の体位固定装置の使用例を示す説明図である。
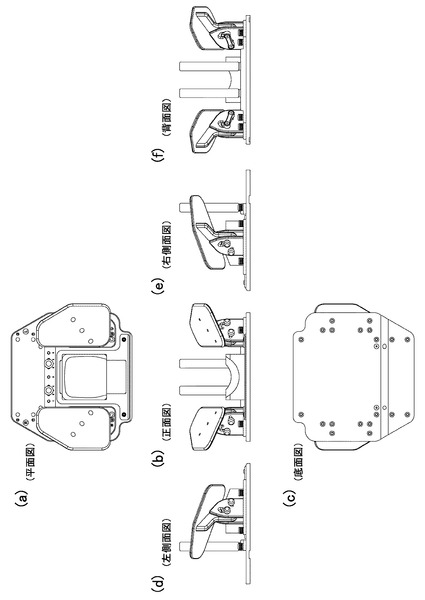
【図5】(a)〜(f)は、図1の体位固定装置の平面図、正面図、底面図、左側面図、右側面図および背面図である。
【発明を実施するための形態】
【0020】
以下に、図面を参照して本発明を適用した体位固定装置の実施の形態を説明する。
【0021】
(全体構成)
図1、図2および図5を参照して、本発明の実施の形態に係る放射線治療用の体位固定装置の全体構成を説明する。体位固定装置1は一定厚さの基板2の上に各部品が取り付けられた構成となっている。基板2はポリエチレン発泡体からなる板材であり、全体として矩形輪郭のものであり、その前端部分が狭い幅となっており、その後半部分が後端に向けて幅が漸減している台形状となっている。基板2はポリエチレン発泡体以外の素材、例えば、CFRPその他の素材から形成することができ、また、その形状の本例の形状に限定されるものではない。
【0022】
基板2の上面2aには、その幅方向の中央部分に頭部支持台3が取り外し可能な状態で設置されている。頭部支持台3は例えばポリスチレン発泡体から形成されている。頭部支持台3は必要に応じて取り付けられるものであり、必須のものではない。基板2の上面2aにおける頭部支持台3の両側には、左腕載せ台4および右腕載せ台5が取り外し可能な状態で設置されている。また、基板2の上面2aにおける頭部支持台3の後側には、左腕載せ台4および右腕載せ台5の間の部分に、左手握り棒6および右手握り棒7が取り外し可能な状態で設置されている。
【0023】
(腕載せ台)
左腕載せ台4および右腕載せ台5は左右対称な位置に配置されており、左右対称な形状および構造のものである。したがって、左腕載せ台4について説明し、右腕載せ台5の説明は省略し、図においては双方の腕載せ台4、5において対応する部位には同一の符号を付してある。
【0024】
左腕載せ台4は、上面が平坦な腕載置面11となっている腕載置部材12を備えている。また、腕載置面11の傾斜角度を変えることができるように腕載置部材12を旋回可能な状態で支持している脚部材13と、腕載置部材12を脚部材13に対して所定の旋回位置に固定するための固定用ボルト14を備えている。さらに、脚部材13を支持していると共に基板2に対して平行な方向にスライド可能な状態で取り付けられている脚支持部材15と、脚支持部材15を基板2に対して所定のスライド位置に固定するための2本の固定用ボルト16、17を備えている。
【0025】
図3は体位固定装置1の各部の位置調整方向および角度調整方向を示す説明図である。図3も参照して、左腕載せ台4の各部の構成を詳しく説明する。まず、基板2の上面2aに取り付けられている脚支持部材15は、基板2の前後方向に細長い長方形輪郭をしたポリエチレン発泡体からなる板材からなる。勿論、基板2と同様に、ポリエチレン発泡体以外の素材から形成することも可能である。脚支持部材15の上面には、その前後の部分に、その上面から裏面に貫通しているT字状溝18、19が切られている。前側のT字状溝18は、基板2の前後方向Yに対して後方および外方に向かって45度傾斜した方向に延びる一定幅の第1溝18aと、この第1溝18aの長さ方向の中間位置から内方に直角に延びている一定幅の第2溝18bからなる。第2溝18bの長さは第1溝18aの長さの1/2である。後側のT字状溝19は前側のT字状溝18と同一形状および大きさのものであり、第1溝19aと第2溝19bからなる。
【0026】
基板2の上面2aには、前後のT字状溝18、19の間の距離に対応する間隔の位置にボルト固定穴(図示せず)が形成されている。固定用ボルト16、17を前後のT字状溝18、19に上側から差し通して前後の基板側のボルト固定穴に締結することにより、脚支持部材15が基板2の上面2aに固定される。固定用ボルト16、17を緩め、これらが前後のT字状溝18、19に沿ってスライドするように、脚支持部材15を上面2aに対して平行にスライドさせ、所望の位置で、固定用ボルト16、17を締結する。これにより、脚支持部材15の位置を、基板2に対して、T字状溝18、19によって規定される範囲内で前後左右に移動できる。すなわち、図3に矢印A、Bで示す第1、第2移動経路に沿って左腕載せ台4を前後左右に移動させることができ、これらの間隔も調整できる。
【0027】
なお、T字状溝18、19は、左腕載せ台4を、基板2の上面2aにおける所定の範囲内で任意の位置に移動させるためのものである。したがって、左腕載せ台4を所定の範囲内で平面上の任意の位置に移動させることができるものであれば、溝形状はT字状に限らず、その他の形状の溝であってもよいことは勿論である。また、場合によっては、溝を基板2の側に形成し、固定用ボルト16、17のボルト固定穴を脚支持部材15の側に形成し、固定用ボルト16、17を基板2の裏面側から挿入して脚支持部材15を固定することも可能である。
【0028】
次に、この構成の脚支持部材15によって支持されている脚部材13は、前後のT字状溝18、19の間の位置において、脚支持部材15の上面15aから垂直に起立しているポリエチレン発泡体からなる2枚の垂直板21、22を連結固定した構成となっている。ポリエチレン発泡体以外の素材から形成することも勿論可能である。垂直板21、22は前後方向Yに対して前側が内方に向かうように45度傾斜した方向(第1溝18aに平行な方向)に延びる状態で脚支持部材15に取り付けられている。傾斜方向は45度に限定されるものではなく、それ以外の傾斜角度にすることも可能である。2枚の垂直板21、22における高さ方向の途中位置には、これらの垂直板21、22に直交する方向に向けて水平に(第2溝18bに平行な方向に)、支軸23が架け渡されている。また、2枚の垂直板21、22における支軸23よりも後側の部分には、当該支軸23を中心とする所定角度を張る一定幅の円弧溝24が切られている。
【0029】
脚部材13の上に取り付けられている腕載置部材12はポリエチレン発泡体からなり、上面が腕載置面11となっている腕載置板25と、この裏面から垂直に下方に延びている垂直支持板26からなる。腕載置部材12の素材もポリエチレン発泡体以外の素材であってもよいことは勿論である。腕載置板25の腕載置面11は、支軸23に平行な面であると共に、当該支軸23に直交する方向においては基板前方に向けて下方に所定の角度で傾斜している傾斜面となっている。垂直支持板26は、脚部材13の2枚の垂直板21、22の間に挿入されており、支軸23を中心として旋回可能な状態で当該支軸23に連結されている。また、2枚の垂直板21、22に形成した円弧溝24に対峙する部位には、固定用ボルト14のボルト穴(図示せず)が形成されている。
【0030】
腕載置部材12を、支軸23を中心として旋回すると、その腕載置面11の傾斜角度および高さ位置を変えることができる。所定の傾斜角度および高さの旋回位置において、固定用ボルト14を垂直板21、22の円弧溝24および垂直支持板26のボルト穴(図示せず)に通して締結固定すると、腕載置部材12がその位置に固定される。このようにして、腕載置面11は、図3に矢印Cで示すように、支軸23を中心として斜め前方に倒れる方向に旋回させて、その傾斜角度および高さを変えることができ、左右の腕載置面11の間隔も調整できる。本例では、間隔を広げる方向に旋回させると、左右の腕載置面11の傾斜角度が緩くなり、それらの高さ位置が高くなる。逆に、間隔を狭める方向に旋回させると、左右の腕載置面11の傾斜角度が急になり、それらの高さ位置が低くなる。
【0031】
なお、本例では、腕載置面11が形成されている腕載置部材12を、支軸23を中心として旋回させることにより、腕載置面11の傾斜角度および高さを変えるようにしている。旋回式の機構以外の機構を用いることもできる。例えば、腕載置部材12を、垂直支持板26の上端に取り付けたピボット軸受を中心として前後左右に揺動可能な状態で支持し、所定の傾斜角度位置に固定できるように構成してもよい。この場合は、例えば、垂直支持板26を伸縮式のものとして、腕載置部材12の腕載置面11の高さ位置を変えるようにすればよい。
【0032】
(握り棒)
次に、左手握り棒6および右手握り棒7は円柱状部材からなり、これらは、基板2の上面2aに着脱可能に取り付けた棒支持部材28に、垂直な姿勢で着脱可能に取り付けられている。なお、左手握り棒6、右手握り棒7を傾斜した姿勢で棒支持部材28に取り付けておくことも可能である。また、本例では直線状に延びる左手握り棒6、右手握り棒7を用いているが、湾曲した形状のものなどを用いることも可能である。
【0033】
棒支持部材28は、基板2の幅方向Xに延びる細長い長方形の一定厚さの板材からなり、その長さ方向に沿って所定の間隔で複数の取付穴29が垂直に形成されている。これらの取付穴29には、左手握り棒6、右手握り棒7の下端面から突出しているネジ部(図示せず)をねじ込み固定可能である。取付穴29の位置を変えることにより、図3の矢印Dで示すように、左手握り棒6、右手握り棒7の間隔および幅方向Xの位置を変えることが可能である。
【0034】
また、棒支持部材28の長さ方向の両端部には、上下方向に貫通して延びるボルト穴(図示せず)が形成されている。基板2の側には、基板側のボルト穴の間隔と同一間隔で3組のボルト穴が形成されている。図においては、棒支持部材28によって隠されている1組のボルト穴を省略してあり、残りの2組のボルト穴33a、33b、ボルト穴34a、34bを示してある。これらの3組のボルト穴は前後方向Yに一定の間隔で配列されている。棒支持部材28の側の不図示のボルト穴に差し通した一対の固定用ボルト35a、35bを、3組のボルト穴のいずれか1組のものに締結固定することにより、棒支持部材28の取付け位置を図3に矢印Eで示すように、前後方向Yに移動させることができる。したがって、左手握り棒6および右手握り棒7は、その間隔、幅方向Xの位置、および前後方向Yの位置を調整することができる。
【0035】
本例では、棒支持部材28を使用しているが、これを省略することも可能である。例えば、基板2に、幅方向Xおよび前後方向Yに左右対称の状態で複数の固定穴を形成しておき、これらの固定穴に直接、左手握り棒6、右手握り棒7を固定することも可能である。
【0036】
(使用例)
図4は体位固定装置1の使用例を示す説明図であり、(a)はワイドポジションでの患者の体位固定状態を示す説明図であり、(b)はナローポジションでの患者の体位固定状態を示す説明図である。
【0037】
図4(a)に示すワイドポジションの状態は、例えば図1に示す標準設定状態である。この状態では、左腕載せ台4および右腕載せ台5の旋回量が零の状態であり、それらが幅方向Xに最も広い間隔の位置とされると共に、前後方向Yにおいては最も後方の位置とされる。したがって、左右の腕載置面の間隔が最も広く、傾斜角度が最も緩く、高さが最も高い状態にある。患者40の両側の腕41、42の全体、すなわち、上腕部分および前腕部分が左右の平坦な腕載置面11によって支持され、この状態で左右の握り棒6、7が握られている。この状態では、患者40の両側の腕41、42の肘が両側に大きく屈曲して広がるので、左手握り棒6、右手握り棒7は、幅方向Xに最も広い間隔の位置とされると共に、前後方向Yにおいては最も前方の位置とされる。
【0038】
これに対して、図4(b)に示すナローポジションの状態では、例えば、左腕載せ台4および右腕載せ台5の旋回量が最大の状態であり、それらが幅方向Xに最も狭い間隔の位置とされると共に、前後方向Yにおいては最も前方の位置とされる。したがって、左右の腕載置面11の間隔が最も狭く、それらの内側および前方への傾斜角度が最も急になり、高さも最も低い状態になる。この状態では、患者40の両側の腕41、42の肘の曲がりが小さく前後方向Yに延びるので、左手握り棒6、右手握り棒7は、幅方向Xに最も狭い間隔の位置とされると共に、前後方向Yにおいては最も後方の位置とされる。
【符号の説明】
【0039】
1 体位固定装置
2 基板
2a 上面
3 頭部支持台
4 左腕載せ台
5 右腕載せ台
6 左手握り棒
7 右手握り棒
11 腕載置面
12 腕載置部材
13 脚部材
14 固定用ボルト
15 脚支持部材
16、17 固定用ボルト
18、19 T字状溝
18a、19a 第1溝
18b、19b 第2溝
21、22 垂直板
23 支軸
24 円弧溝
25 腕載置板
26 垂直支持板
28 棒支持部材
29 取付穴
33a、33b ボルト穴
34a、34b ボルト穴
35a、35b 固定用ボルト
40 患者
41、42 腕
X 基板の幅方向
Y 基板の前後方向
【技術分野】
【0001】
本発明は、診断、治療あるいは検査用の台の上において挙上位の状態で患者あるいは被験者の体位を固定するために用いる体位固定装置に関する。
【背景技術】
【0002】
放射線治療などにおいては、放射線照射中に患者の体動を拘束するために体位固定装置を用いて患者を治療台に固定している。体位固定装置は、患者に対する放射線照射位置精度の向上、照射位置再現性の向上のためにも不可欠である。非特許文献1には、このような放射線治療用固定装置である乳房用固定具(マンマ用固定プレートESF−17)が掲載されている。
【0003】
この非特許文献1に掲載されている乳房用固定具は、矩形の基板の上面中央部分が頭部を載せる部位となっている。また、基板における頭部を載せる部位の両側には、前側に左右一対のアームホルダーが配置され、後側に左右一対のリストホルダーが配置されている。各リストホルダーの後側には水平にグリップが配置されている。これらのアームホルダー、リストホルダーは湾曲状のアーム支持面、凹状のリスト支持面を備えており、これらの支持面位置の高さ、および傾斜角度を調整できるようになっている。
【0004】
放射線治療台の上に乳房用固定具を載せ、患者の頭部を基板の中央の部位に載せ、患者の左右の上肢を上腕支持台および前腕支持台に載せ、左右の手でグリップを握らせることにより、患者を挙上位の状態で固定することができる。この結果、乳房接線照射などの放射線治療において、精度良く患者を固定でき、繰り返しの治療において同一位置に患者を精度よく固定でき、再現性にも優れている。また、アームホルダーとリストホルダーの高さ、角度を調整することにより患者の上肢を任意の角度に固定でき、患者の体位を安定させることができる。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】“乳房用固定具、ESFORM製品紹介、放射線治療用固定システム「エスフォーム」”、エンジニアリングシステム株式会社、[2011年9月29日検索]、インターネット<URL:http://esform.com/products/mamma/index.html>
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来の放射線治療等に用いる体位固定装置は、上記の非特許文献1に掲載されているように、左右の上肢のそれぞれを、複数の支持台を用いて支持し、各支持台の高さ、傾斜角度を調整することにより、様々な体形に対応でき、自由度が高いという利点がある。また、各支持台の支持面は湾曲状、凹状をしており、上肢を安定的に支持できるという利点がある。
【0007】
しかしながら、左右のそれぞれにおいて、上腕部分および前腕部分を支持しているアームホルダーおよびリストホルダー並びにグリップの調整を行う必要があり、これらの部分を患者の体形に合わせて調整する作業が煩雑であり、慣れていないと調整に時間が掛かる。また、各ホルダーは湾曲状あるいは凹状の支持面となっており、患者によっては、これらに載せた上肢の部分が支持面にフィットせずに違和感を覚えることがある。さらに、上肢の上腕部分の一部および前腕部分の手首部分がスポット的に支持されているので、上腕における支持されている間の部分が動いてしまうことがある。
【0008】
本発明の課題は、このような点に鑑みて、患者の体形に適合するように上腕の支持面の高さおよび傾斜角度を調整する作業を簡便に行うことができ、上肢の全体を確実に固定することのできる廉価な構成の体位固定装置を提案することにある。
【課題を解決するための手段】
【0009】
上記の課題を解決するために、本発明は、診断、治療あるいは検査用の台の上において挙上位の状態で患者あるいは被験者の体位を固定するために用いる体位固定装置において、
基板と、
前記基板の上面において左右対称の位置に配置された左腕載せ台および右腕載せ台と、
前記基板の上面において左右対称の位置に配置された左手握り棒および右手握り棒とを有しており、
前記左腕載せ台および前記右腕載せ台の間における基板後側の位置に、前記左手握り棒および前記右手握り棒が配置されており、
前記左腕載せ台および前記右腕載せ台のそれぞれは、前腕および上腕を載せるための平坦な腕載置面を備えており、
前記左腕載せ台および前記右腕載せ台のそれぞれは、前記基板に対する前記腕載置面の傾斜角度および高さを変更可能であることを特徴としている。
【0010】
本発明では、左右の上肢のそれぞれに対して、前腕および上腕を同一の平坦な腕載置面によって支持している。腕載置面を平坦な面とすることにより、単一の腕載置面によって各腕の全体を支持することができる。また、患者等の体形に合うように単一の腕載せ台(左腕載せ台、右腕載せ台)を調整するだけでよいので、簡便且つ短時間で、適切に上肢を固定するための調整が可能になる。さらに、従来の装置に比べて部品点数を少なくでき、しかも、平坦な腕載置面を備えた腕載せ台は湾曲状あるいは凹状の面を備えた台に比べて生産性に優れているので、従来の装置に比べて製造コストを下げることができる。
【0011】
ここで、患者、被験者の様々な体形への適合性を高めるために、左腕載せ台および右腕載せ台のそれぞれが、基板に平行な方向において腕載置面の基板に対する相対位置を変更可能となっていることが望ましい。
【0012】
また、同一の平坦な腕載置面上において挙上位をとった場合に、まれに、上肢の前腕の部分の位置が腕載置面上において定まらない場合があり、その原因は、手の位置が定まらない場合が殆どである。よって、左手握り棒および右手握り棒のそれぞれの基板に対する位置を、基板幅方向および前後方向に変更できるようにしておき、このような場合に対処できるようにしておくことが望ましい。
【0013】
さらに、頭部位置を確実に固定するためには、基板の上面に、頭部を載せるための頭部支持台を取り付けておけばよい。
【0014】
なお、うつ伏せ状態で体位固定する場合には、左右の腕載せ台を基板から取り外して、基板と、左手握り棒および右手握り棒のみを用いればよい。
【0015】
また、腕載置面の高さ、傾斜角度の変更は、腕載せ台を基板に平行な旋回中心軸線回りに旋回させることにより簡単に実現することができる。
【0016】
さらに、基板、左右の腕載せ台、頭部支持台を、X線の透過性に優れたポリエチレン発泡体から形成することが望ましい。
【発明の効果】
【0017】
本発明の体位固定装置によれば、左右の上肢の前腕部分および上腕部分を、平坦な同一の腕載置面によって支持することで、患者の体形に合わせて上肢を確実に固定するために腕載置面の高さ、傾斜角度等を調整する作業を簡単かつ短時間で行うことができる。また、上肢を支持する腕載置面を三次元的に傾斜角度、高さ位置、基板前後左右方向の位置を変更できるようにし、グリップの基板前後左右方向の位置を変更できるようにすることで、様々な患者の体形に対応可能な汎用性の高い体位固定装置を実現できる。
【0018】
さらには、各上肢を固定するために単一の腕載せ台のみを使用しているので部品点数を少なくできる。また、上肢を載せるための面は平坦な面であるので、腕載せ台は、湾曲状、凹状の面を備えた従来の台を製作する場合に比べて生産性に優れている。したがって、体位固定装置の製造コストの低減化に有利である。
【図面の簡単な説明】
【0019】
【図1】本発明を適用した実施の形態に係る放射線治療用の体位固定装置の斜視図である。
【図2】(a)は図1の体位固定装置の平面図、(b)は正面図、(c)は側面図である。
【図3】図1の体位固定装置における各部の位置調整方法および角度調整方法を示す説明図である。
【図4】(a)および(b)は図1の体位固定装置の使用例を示す説明図である。
【図5】(a)〜(f)は、図1の体位固定装置の平面図、正面図、底面図、左側面図、右側面図および背面図である。
【発明を実施するための形態】
【0020】
以下に、図面を参照して本発明を適用した体位固定装置の実施の形態を説明する。
【0021】
(全体構成)
図1、図2および図5を参照して、本発明の実施の形態に係る放射線治療用の体位固定装置の全体構成を説明する。体位固定装置1は一定厚さの基板2の上に各部品が取り付けられた構成となっている。基板2はポリエチレン発泡体からなる板材であり、全体として矩形輪郭のものであり、その前端部分が狭い幅となっており、その後半部分が後端に向けて幅が漸減している台形状となっている。基板2はポリエチレン発泡体以外の素材、例えば、CFRPその他の素材から形成することができ、また、その形状の本例の形状に限定されるものではない。
【0022】
基板2の上面2aには、その幅方向の中央部分に頭部支持台3が取り外し可能な状態で設置されている。頭部支持台3は例えばポリスチレン発泡体から形成されている。頭部支持台3は必要に応じて取り付けられるものであり、必須のものではない。基板2の上面2aにおける頭部支持台3の両側には、左腕載せ台4および右腕載せ台5が取り外し可能な状態で設置されている。また、基板2の上面2aにおける頭部支持台3の後側には、左腕載せ台4および右腕載せ台5の間の部分に、左手握り棒6および右手握り棒7が取り外し可能な状態で設置されている。
【0023】
(腕載せ台)
左腕載せ台4および右腕載せ台5は左右対称な位置に配置されており、左右対称な形状および構造のものである。したがって、左腕載せ台4について説明し、右腕載せ台5の説明は省略し、図においては双方の腕載せ台4、5において対応する部位には同一の符号を付してある。
【0024】
左腕載せ台4は、上面が平坦な腕載置面11となっている腕載置部材12を備えている。また、腕載置面11の傾斜角度を変えることができるように腕載置部材12を旋回可能な状態で支持している脚部材13と、腕載置部材12を脚部材13に対して所定の旋回位置に固定するための固定用ボルト14を備えている。さらに、脚部材13を支持していると共に基板2に対して平行な方向にスライド可能な状態で取り付けられている脚支持部材15と、脚支持部材15を基板2に対して所定のスライド位置に固定するための2本の固定用ボルト16、17を備えている。
【0025】
図3は体位固定装置1の各部の位置調整方向および角度調整方向を示す説明図である。図3も参照して、左腕載せ台4の各部の構成を詳しく説明する。まず、基板2の上面2aに取り付けられている脚支持部材15は、基板2の前後方向に細長い長方形輪郭をしたポリエチレン発泡体からなる板材からなる。勿論、基板2と同様に、ポリエチレン発泡体以外の素材から形成することも可能である。脚支持部材15の上面には、その前後の部分に、その上面から裏面に貫通しているT字状溝18、19が切られている。前側のT字状溝18は、基板2の前後方向Yに対して後方および外方に向かって45度傾斜した方向に延びる一定幅の第1溝18aと、この第1溝18aの長さ方向の中間位置から内方に直角に延びている一定幅の第2溝18bからなる。第2溝18bの長さは第1溝18aの長さの1/2である。後側のT字状溝19は前側のT字状溝18と同一形状および大きさのものであり、第1溝19aと第2溝19bからなる。
【0026】
基板2の上面2aには、前後のT字状溝18、19の間の距離に対応する間隔の位置にボルト固定穴(図示せず)が形成されている。固定用ボルト16、17を前後のT字状溝18、19に上側から差し通して前後の基板側のボルト固定穴に締結することにより、脚支持部材15が基板2の上面2aに固定される。固定用ボルト16、17を緩め、これらが前後のT字状溝18、19に沿ってスライドするように、脚支持部材15を上面2aに対して平行にスライドさせ、所望の位置で、固定用ボルト16、17を締結する。これにより、脚支持部材15の位置を、基板2に対して、T字状溝18、19によって規定される範囲内で前後左右に移動できる。すなわち、図3に矢印A、Bで示す第1、第2移動経路に沿って左腕載せ台4を前後左右に移動させることができ、これらの間隔も調整できる。
【0027】
なお、T字状溝18、19は、左腕載せ台4を、基板2の上面2aにおける所定の範囲内で任意の位置に移動させるためのものである。したがって、左腕載せ台4を所定の範囲内で平面上の任意の位置に移動させることができるものであれば、溝形状はT字状に限らず、その他の形状の溝であってもよいことは勿論である。また、場合によっては、溝を基板2の側に形成し、固定用ボルト16、17のボルト固定穴を脚支持部材15の側に形成し、固定用ボルト16、17を基板2の裏面側から挿入して脚支持部材15を固定することも可能である。
【0028】
次に、この構成の脚支持部材15によって支持されている脚部材13は、前後のT字状溝18、19の間の位置において、脚支持部材15の上面15aから垂直に起立しているポリエチレン発泡体からなる2枚の垂直板21、22を連結固定した構成となっている。ポリエチレン発泡体以外の素材から形成することも勿論可能である。垂直板21、22は前後方向Yに対して前側が内方に向かうように45度傾斜した方向(第1溝18aに平行な方向)に延びる状態で脚支持部材15に取り付けられている。傾斜方向は45度に限定されるものではなく、それ以外の傾斜角度にすることも可能である。2枚の垂直板21、22における高さ方向の途中位置には、これらの垂直板21、22に直交する方向に向けて水平に(第2溝18bに平行な方向に)、支軸23が架け渡されている。また、2枚の垂直板21、22における支軸23よりも後側の部分には、当該支軸23を中心とする所定角度を張る一定幅の円弧溝24が切られている。
【0029】
脚部材13の上に取り付けられている腕載置部材12はポリエチレン発泡体からなり、上面が腕載置面11となっている腕載置板25と、この裏面から垂直に下方に延びている垂直支持板26からなる。腕載置部材12の素材もポリエチレン発泡体以外の素材であってもよいことは勿論である。腕載置板25の腕載置面11は、支軸23に平行な面であると共に、当該支軸23に直交する方向においては基板前方に向けて下方に所定の角度で傾斜している傾斜面となっている。垂直支持板26は、脚部材13の2枚の垂直板21、22の間に挿入されており、支軸23を中心として旋回可能な状態で当該支軸23に連結されている。また、2枚の垂直板21、22に形成した円弧溝24に対峙する部位には、固定用ボルト14のボルト穴(図示せず)が形成されている。
【0030】
腕載置部材12を、支軸23を中心として旋回すると、その腕載置面11の傾斜角度および高さ位置を変えることができる。所定の傾斜角度および高さの旋回位置において、固定用ボルト14を垂直板21、22の円弧溝24および垂直支持板26のボルト穴(図示せず)に通して締結固定すると、腕載置部材12がその位置に固定される。このようにして、腕載置面11は、図3に矢印Cで示すように、支軸23を中心として斜め前方に倒れる方向に旋回させて、その傾斜角度および高さを変えることができ、左右の腕載置面11の間隔も調整できる。本例では、間隔を広げる方向に旋回させると、左右の腕載置面11の傾斜角度が緩くなり、それらの高さ位置が高くなる。逆に、間隔を狭める方向に旋回させると、左右の腕載置面11の傾斜角度が急になり、それらの高さ位置が低くなる。
【0031】
なお、本例では、腕載置面11が形成されている腕載置部材12を、支軸23を中心として旋回させることにより、腕載置面11の傾斜角度および高さを変えるようにしている。旋回式の機構以外の機構を用いることもできる。例えば、腕載置部材12を、垂直支持板26の上端に取り付けたピボット軸受を中心として前後左右に揺動可能な状態で支持し、所定の傾斜角度位置に固定できるように構成してもよい。この場合は、例えば、垂直支持板26を伸縮式のものとして、腕載置部材12の腕載置面11の高さ位置を変えるようにすればよい。
【0032】
(握り棒)
次に、左手握り棒6および右手握り棒7は円柱状部材からなり、これらは、基板2の上面2aに着脱可能に取り付けた棒支持部材28に、垂直な姿勢で着脱可能に取り付けられている。なお、左手握り棒6、右手握り棒7を傾斜した姿勢で棒支持部材28に取り付けておくことも可能である。また、本例では直線状に延びる左手握り棒6、右手握り棒7を用いているが、湾曲した形状のものなどを用いることも可能である。
【0033】
棒支持部材28は、基板2の幅方向Xに延びる細長い長方形の一定厚さの板材からなり、その長さ方向に沿って所定の間隔で複数の取付穴29が垂直に形成されている。これらの取付穴29には、左手握り棒6、右手握り棒7の下端面から突出しているネジ部(図示せず)をねじ込み固定可能である。取付穴29の位置を変えることにより、図3の矢印Dで示すように、左手握り棒6、右手握り棒7の間隔および幅方向Xの位置を変えることが可能である。
【0034】
また、棒支持部材28の長さ方向の両端部には、上下方向に貫通して延びるボルト穴(図示せず)が形成されている。基板2の側には、基板側のボルト穴の間隔と同一間隔で3組のボルト穴が形成されている。図においては、棒支持部材28によって隠されている1組のボルト穴を省略してあり、残りの2組のボルト穴33a、33b、ボルト穴34a、34bを示してある。これらの3組のボルト穴は前後方向Yに一定の間隔で配列されている。棒支持部材28の側の不図示のボルト穴に差し通した一対の固定用ボルト35a、35bを、3組のボルト穴のいずれか1組のものに締結固定することにより、棒支持部材28の取付け位置を図3に矢印Eで示すように、前後方向Yに移動させることができる。したがって、左手握り棒6および右手握り棒7は、その間隔、幅方向Xの位置、および前後方向Yの位置を調整することができる。
【0035】
本例では、棒支持部材28を使用しているが、これを省略することも可能である。例えば、基板2に、幅方向Xおよび前後方向Yに左右対称の状態で複数の固定穴を形成しておき、これらの固定穴に直接、左手握り棒6、右手握り棒7を固定することも可能である。
【0036】
(使用例)
図4は体位固定装置1の使用例を示す説明図であり、(a)はワイドポジションでの患者の体位固定状態を示す説明図であり、(b)はナローポジションでの患者の体位固定状態を示す説明図である。
【0037】
図4(a)に示すワイドポジションの状態は、例えば図1に示す標準設定状態である。この状態では、左腕載せ台4および右腕載せ台5の旋回量が零の状態であり、それらが幅方向Xに最も広い間隔の位置とされると共に、前後方向Yにおいては最も後方の位置とされる。したがって、左右の腕載置面の間隔が最も広く、傾斜角度が最も緩く、高さが最も高い状態にある。患者40の両側の腕41、42の全体、すなわち、上腕部分および前腕部分が左右の平坦な腕載置面11によって支持され、この状態で左右の握り棒6、7が握られている。この状態では、患者40の両側の腕41、42の肘が両側に大きく屈曲して広がるので、左手握り棒6、右手握り棒7は、幅方向Xに最も広い間隔の位置とされると共に、前後方向Yにおいては最も前方の位置とされる。
【0038】
これに対して、図4(b)に示すナローポジションの状態では、例えば、左腕載せ台4および右腕載せ台5の旋回量が最大の状態であり、それらが幅方向Xに最も狭い間隔の位置とされると共に、前後方向Yにおいては最も前方の位置とされる。したがって、左右の腕載置面11の間隔が最も狭く、それらの内側および前方への傾斜角度が最も急になり、高さも最も低い状態になる。この状態では、患者40の両側の腕41、42の肘の曲がりが小さく前後方向Yに延びるので、左手握り棒6、右手握り棒7は、幅方向Xに最も狭い間隔の位置とされると共に、前後方向Yにおいては最も後方の位置とされる。
【符号の説明】
【0039】
1 体位固定装置
2 基板
2a 上面
3 頭部支持台
4 左腕載せ台
5 右腕載せ台
6 左手握り棒
7 右手握り棒
11 腕載置面
12 腕載置部材
13 脚部材
14 固定用ボルト
15 脚支持部材
16、17 固定用ボルト
18、19 T字状溝
18a、19a 第1溝
18b、19b 第2溝
21、22 垂直板
23 支軸
24 円弧溝
25 腕載置板
26 垂直支持板
28 棒支持部材
29 取付穴
33a、33b ボルト穴
34a、34b ボルト穴
35a、35b 固定用ボルト
40 患者
41、42 腕
X 基板の幅方向
Y 基板の前後方向
【特許請求の範囲】
【請求項1】
診断、治療あるいは検査用の台の上において挙上位の状態で患者あるいは被験者の体位を固定するために用いる体位固定装置であって、
基板と、
前記基板の上面において左右対称の位置に配置された左腕載せ台および右腕載せ台と、
前記基板の上面において左右対称の位置に配置された左手握り棒および右手握り棒とを有しており、
前記左腕載せ台および前記右腕載せ台の間における基板後側の位置に、前記左手握り棒および前記右手握り棒が配置されており、
前記左腕載せ台および前記右腕載せ台のそれぞれは、前腕および上腕を載せるための平坦な腕載置面を備えており、
前記左腕載せ台および前記右腕載せ台のそれぞれは、前記基板に対する前記腕載置面の傾斜角度および高さを変更可能であることを特徴とする体位固定装置。
【請求項2】
請求項1において、
前記左腕載せ台および前記右腕載せ台のそれぞれは、前記基板に平行な方向において前記腕載置面の前記基板に対する相対位置を変更可能であることを特徴とする体位固定装置。
【請求項3】
請求項1または2において、
前記左手握り棒および右手握り棒のそれぞれは、前記基板に対する位置が前記基板の幅方向および前後方向に変更可能であることを特徴とする体位固定装置。
【請求項4】
請求項1ないし3のうちのいずれかの項において、
前記左腕載せ台および前記右腕載せ台のそれぞれは、
前記腕載置面が形成されている腕載置部材と、
前記腕載置面の前記傾斜角度が変化するように前記腕載置部材を旋回可能な状態で支持している脚部材と、
前記腕載置部材を前記脚部材に対して所定の旋回位置に固定するための第1固定具と、
前記脚部材を支持していると共に前記基板に対して当該基板に平行な方向にスライド可能な状態で取り付けられている脚支持部材と、
前記脚支持部材を前記基板に対して所定のスライド位置に固定するための第2固定具と
を備えていることを特徴とする体位固定装置。
【請求項5】
請求項4において、
前記脚支持部材は、前記基板に対して、当該基板の前後方向に対して基板後方および外方に向かって傾斜した方向に延びる第1移動経路と、この第1移動経路の途中位置から基板内方に直角に延びる第2移動経路とからなるT字状の移動経路に沿って移動可能であり、
前記脚部材は、前記腕載置面と前記基板の間の高さ位置において前記第2移動経路に平行な方向に延びている支軸を中心として、前記腕載置部材を旋回可能な状態で支持しており、
前記左腕載せ台の前記腕載置面は、前記支軸に平行な面であると共に、前記支軸に直交する方向においては基板前方に向けて下方に傾斜した傾斜面であることを特徴とする体位固定装置。
【請求項6】
請求項1ないし5のうちのいずれかの項において、
前記左手握り棒および前記右手握り棒が取り付けられている棒支持部材を有しており、
前記棒支持部材は、前記基板に対して、前記基板の前後方向の異なる位置に取付け可能であり、
前記左手握り棒および前記右手握り棒のそれぞれは、前記棒支持部材に対して、当該棒支持部材が前記基板に取り付けられた状態において前記基板の幅方向に一致する方向における異なる位置に取付け可能であることを特徴とする体位固定装置。
【請求項1】
診断、治療あるいは検査用の台の上において挙上位の状態で患者あるいは被験者の体位を固定するために用いる体位固定装置であって、
基板と、
前記基板の上面において左右対称の位置に配置された左腕載せ台および右腕載せ台と、
前記基板の上面において左右対称の位置に配置された左手握り棒および右手握り棒とを有しており、
前記左腕載せ台および前記右腕載せ台の間における基板後側の位置に、前記左手握り棒および前記右手握り棒が配置されており、
前記左腕載せ台および前記右腕載せ台のそれぞれは、前腕および上腕を載せるための平坦な腕載置面を備えており、
前記左腕載せ台および前記右腕載せ台のそれぞれは、前記基板に対する前記腕載置面の傾斜角度および高さを変更可能であることを特徴とする体位固定装置。
【請求項2】
請求項1において、
前記左腕載せ台および前記右腕載せ台のそれぞれは、前記基板に平行な方向において前記腕載置面の前記基板に対する相対位置を変更可能であることを特徴とする体位固定装置。
【請求項3】
請求項1または2において、
前記左手握り棒および右手握り棒のそれぞれは、前記基板に対する位置が前記基板の幅方向および前後方向に変更可能であることを特徴とする体位固定装置。
【請求項4】
請求項1ないし3のうちのいずれかの項において、
前記左腕載せ台および前記右腕載せ台のそれぞれは、
前記腕載置面が形成されている腕載置部材と、
前記腕載置面の前記傾斜角度が変化するように前記腕載置部材を旋回可能な状態で支持している脚部材と、
前記腕載置部材を前記脚部材に対して所定の旋回位置に固定するための第1固定具と、
前記脚部材を支持していると共に前記基板に対して当該基板に平行な方向にスライド可能な状態で取り付けられている脚支持部材と、
前記脚支持部材を前記基板に対して所定のスライド位置に固定するための第2固定具と
を備えていることを特徴とする体位固定装置。
【請求項5】
請求項4において、
前記脚支持部材は、前記基板に対して、当該基板の前後方向に対して基板後方および外方に向かって傾斜した方向に延びる第1移動経路と、この第1移動経路の途中位置から基板内方に直角に延びる第2移動経路とからなるT字状の移動経路に沿って移動可能であり、
前記脚部材は、前記腕載置面と前記基板の間の高さ位置において前記第2移動経路に平行な方向に延びている支軸を中心として、前記腕載置部材を旋回可能な状態で支持しており、
前記左腕載せ台の前記腕載置面は、前記支軸に平行な面であると共に、前記支軸に直交する方向においては基板前方に向けて下方に傾斜した傾斜面であることを特徴とする体位固定装置。
【請求項6】
請求項1ないし5のうちのいずれかの項において、
前記左手握り棒および前記右手握り棒が取り付けられている棒支持部材を有しており、
前記棒支持部材は、前記基板に対して、前記基板の前後方向の異なる位置に取付け可能であり、
前記左手握り棒および前記右手握り棒のそれぞれは、前記棒支持部材に対して、当該棒支持部材が前記基板に取り付けられた状態において前記基板の幅方向に一致する方向における異なる位置に取付け可能であることを特徴とする体位固定装置。
【図1】


【図2】
【図4】
【図5】
【図3】
【図2】
【図4】
【図5】
【図3】
【公開番号】特開2013−85659(P2013−85659A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−228220(P2011−228220)
【出願日】平成23年10月17日(2011.10.17)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 掲載年月日:平成23年 8月19日 http://www.engineeringsystem.co.jp/ http://esform.com/products/mamma/index.html
【出願人】(591189812)エンジニアリングシステム株式会社 (15)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月17日(2011.10.17)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 掲載年月日:平成23年 8月19日 http://www.engineeringsystem.co.jp/ http://esform.com/products/mamma/index.html
【出願人】(591189812)エンジニアリングシステム株式会社 (15)
【Fターム(参考)】
[ Back to top ]