
体内インプラントの伸長および挿入具の連接および方法
スペーサ(10)、移送デバイス(80)および展開器(7)を有する椎骨部材を処置するためのデバイスを提供する。スペーサ(10)は、少なくとも第1および第2の部材(20、30)を備え、第1の部材(20)は、少なくとも1つの傾斜セクション(25、26)および接触表面(27、28)を有し、第2の部材(30)は、少なくとも1つの傾斜セクションおよび接触表面を有する。移送デバイス(80)は、第1の部材(20)および第2の部材(30)の少なくとも一方に取り付けられている。第1および第2の部材(20、30)は、傾斜セクションが接触してデバイスの高さを広げるように、互いに対して可動である。デバイスは、第1の高さを有する第1の閉鎖方向、第1の高さよりも大きい第2の高さを有する第2の開放方向、およびそれらの間の段階の間に配置可能である。スペーサを使用して椎骨部材を離隔させる方法も開示されている。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、隣接する椎骨部材間に配置するためのデバイスに関する。
【背景技術】
【0002】
本出願は、2003年2月3日に提出された米国特許仮出願第60/444,561号の米国特許法第35条に基づく優先権を主張する。この出願は、参照によってその全体において本明細書に特に組み込まれる。
【0003】
様々なデバイスが、椎骨部材の間隔を制御するために使用されている。これらのデバイスは、椎骨部材の特定の表面にアクセスすることが必要である外科手術中などに、一時的な基礎の上で使用されてもよい。1つの例は、椎骨部材のエンドプレートを準備することを含む。デバイスはまた、椎骨部材を離隔させるために患者体内に恒久的に留まってもよい。
【0004】
最も侵襲的でない方式で椎骨部材の間でデバイスを配置することが困難であることがよくある。小さいデバイスが、患者体内の椎骨部材の間に最も非侵襲的な方式で挿入されてもよい。しかし、小さいサイズは、椎骨部材を効果的に離隔させるのに十分でないことがある。より大きなデバイスが、椎骨部材を離隔させるのに効果的であるが、患者体内の椎骨部材の間に最も非侵襲的な方式で挿入することができない。
【発明の開示】
【課題を解決するための手段】
【0005】
本発明は、隣接する椎骨部材間に配置するデバイスに関するものである。一実施形態では、デバイスは、一般にスペーサ、移送デバイスおよび展開器を90%備える。スペーサは、隣接する椎骨部材間に配置され、閉鎖方向、開放方向、およびそれらの間の段階で選択的に調節可能である。移送デバイスが、患者体内にスペーサを配置し、展開器が、スペーサを選択された方向に移動させる。
【0006】
一実施形態では、スペーサは、最小の高さを有する第1の方向と、最大の高さを有する第2の方向との間で選択的に配置可能であり、またその間で選択された位置に配置可能である。デバイスは、第1の方向に延びる第1の傾斜表面を有する第1の部材と、第2の方向に延びる第2の傾斜表面を有する第2の部材とを備えてもよい。第1の部材が第2の部材に対して移動すると、傾斜表面が互いに接触し、スペーサのサイズが増加する。デバイスは、処置が完了したとき患者から取り外されることができるように移送デバイス上に配置されてもよく、または、恒久的にまたは所定の期間に亘ってのいずれかで、患者体内に留まるために移送デバイスから取外し可能であってもよい。
【0007】
デバイスを使用する一実施形態では、デバイスは、2つの椎骨部材の間に配置される。配置中、デバイスは、挿入を容易にし、患者に対して最も非侵襲的であるように、小さなサイズを有する閉鎖方向にある。スペーサは、椎骨部材の間にスペーサを配置するために移送デバイスに対して傾斜されてもよい。いったん配置されたあと、スペーサのセクションが、傾斜表面が互いに接触するように、互いに対して移動される。部材の接触および移動はスペーサの全体的高さを高める。スペーサは、用途に応じて様々な高さに配置されてもよい。いくつかの実施形態では、スペーサは、ある高さにスペーサをロックし、スペーサが閉鎖するのを防止するためのロッキング手段を備える。
【発明を実施するための最良の形態】
【0008】
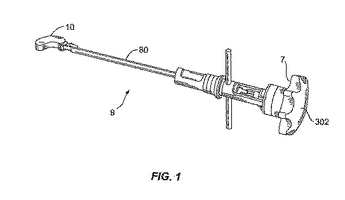
本発明は、隣接する椎骨部材の間に配置するためのデバイスを目的としている。図1は、スペーサ10と、移送デバイス80と展開器7を備える、全体として符号9で示される一実施形態を示している。スペーサ10は、隣接する椎骨部材の間に配置され、閉鎖方向、開放方向およびそれらの間の段階の間で選択的に調節可能である。移送デバイス80は、スペーサを患者体内に配置するために機能する。展開器7は、スペーサを選択された延伸方向に移動させる。
【0009】
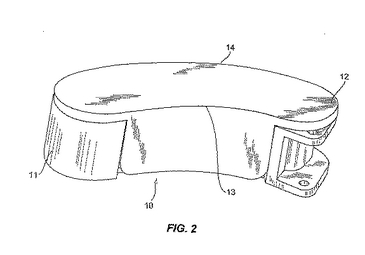
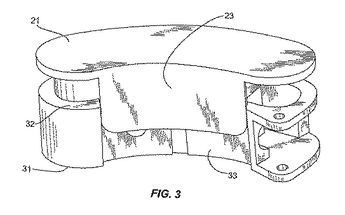
スペーサ10は、用途に応じて、細長形状、曲線形状などの様々な形状およびサイズを有する。スペーサ10は、椎骨部材の間で患者体内に挿入されたとき、最も非侵襲的となるように小さなサイズを有する図2に示すような第1の位置の間で調節可能である。図3は、スペーサ10が椎骨部材と接触するように伸延された第2の位置を示している。スペーサ10は、所望の用途に応じて様々な異なる高さに伸延可能である。
【0010】
図2および3は、丸みを帯びた形状を有する第1の遠端部11および第2の近端部12を有する曲線的なエンドウ豆形状を有するスペーサ10の一実施形態を示している。第1および第2の側面13、14は湾曲している。スペーサ10は、ほぼ一定の幅を有してもよく、ある特定の実施形態は約33mmの幅を有する。スペーサ10の高さは、伸延量に応じて様々であり、以下で詳細に説明するように傾斜表面の角度によって決定される。ある特定の実施形態では、スペーサ10は、約9mmから約13mmの範囲の高さを有する。ある実施形態では、スペーサ10は、椎骨部材の寸法に適合するように、閉鎖、開放または展開方向のうちの1つまたは複数の方向に傾斜されている。
【0011】
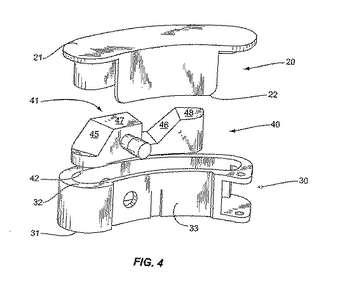
図4は、第1の部材20、第2の部材30および第3の部材40を備えるスペーサ10の一実施形態を示している。それぞれ椎骨部材と接触するために、第1の部材20は、接触表面21を備え、第2の部材30は、接触表面31を備える。接触表面21、31は、ほぼ滑らかである、または椎骨部材と接触するように隆起またはこぶなどの安定構造を有してもよい。
【0012】
第1および第2の部材20、30は、閉鎖方向で互いにかみ合うように相補的な形状を有する。部材20、30の外縁部22、32は、スペーサ10の全体サイズを低減させるために閉鎖方向に配置されている。外縁部32は、スペーサ10が閉鎖方向にあるとき、接触表面21の内縁部と接触または離隔される。側壁23、33が接触表面から延びており、スペーサ10の全体形状を定義するために様々な異なる形状およびサイズを有する。
【0013】
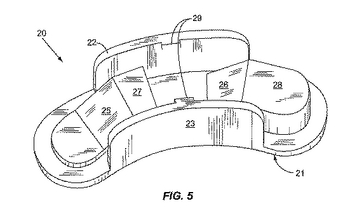
図5は、第1の部材20の下側面の一実施形態を示している。側壁23が、第2の部材30とかみ合うように外向きに延びている。タブ29が、展開中、スペーサ10が開放方向にあるとき、さらに安定させるために第2の部材の側壁33内の溝とかみ合うように側壁23の1つから外向きに延びてもよい。タブ29は、スペーサ10の展開中、第1の部材20が第2の部材30から分離するのを防止するために溝の上縁部(図18参照)と接触する。
【0014】
第1の部材20は、第1の傾斜セクション25と支持セクション27、および第2の傾斜セクション26と支持セクション28を備える。傾斜セクション25、26は、様々な長さを有してもよく、接触表面21に対して様々な角度で配置することができる。一実施形態では、セクション25、26と接触表面21の間の角度の範囲は、約20°から約40°の間である。支持セクション27、28は、傾斜セクション25、26と隣接して配置され、傾斜セクション25、26に対して異なる角度で配置されている。一実施形態では、支持セクション27、28は、接触表面21とほぼ平行である。
【0015】
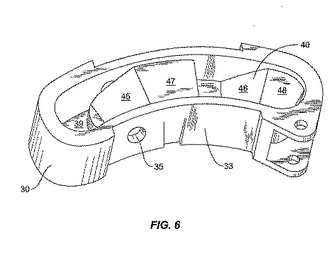
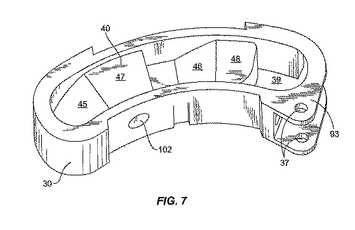
第2の部材30の形状は、第1の部材20に対応している。側壁33が、第1の部材20と整列するように第2の部材30の一部分または全体の周りに延びており、第3の部材40を維持するための内部セクションを形成している。内部セクション39が、接触表面31と対向する側壁33内に形成されている。図7および図8に示すような一実施形態では、内部セクション39は、第3の部材40の相対運動を容易にするために、ほぼ平坦であり、滑らかである。枠93は、第2の部材30から延びていてもよい。枠93上に配置された開口37が、以下で説明するように移送デバイス80の取付を可能にする。
【0016】
第3の部材40は、第1の部材20と第2の部材30との間に配置されている。第3の部材40は、第1の部材20と組合わせられる傾斜セクション45,46を有する第1の側面41と、第2の部材30と接触する第2の側面42とを備える。第1の側面41の一実施形態が図4に示されており、第1の傾斜セクション45とそれに隣接する支持セクション47、および第2の傾斜セクション46と支持セクション48を備える。傾斜セクション45、46は、様々な長さを有してもよく、第2の側面42に対して様々な角度で配置することができる。一実施形態では、セクション45、46と第2の側面41との間の角度の範囲は、約20°から約40°の間である。支持セクション47、48が、傾斜セクション45、46に対して異なる角度で配置されている。一実施形態では、支持セクション47、48は、第2の側面42とほぼ平行である。一実施形態では、第2の側面42は、内部セクション39の平坦な表面に対応する平面である。
【0017】
第3の部材40は、第2の部材30の側壁33によって形成された境界面以下の幅および長さを有してもよい。小さいサイズは、第3の部材40の第2の部材30に対する滑動運動を可能にする。第2および第3の部材30、40の相対的な位置が図6および7に示されている。図6は、第3の部材40が第2の部材30の近位の縁部に接して配置されている第1の位置を示している。図7は、第3の部材40が第2の部材30の遠位の縁部に接して配置されている第2の位置を示している。
【0018】
第3の部材40は、スペーサ10を閉鎖方向から開放方向へ展開させるために第1および第2の部材20、30に対して移動する。スペーサ10は、患者体内の椎骨部材の間への配置を容易にするために最小のサイズおよび形状を有する閉鎖方向で患者体内に配置されてもよい。第1および第3の部材20、40の傾斜セクション25、26、45、46は、閉鎖方向で分離される。
【0019】
スペーサ10の展開は、第3の部材40が第1の部材20に対して移動することによって行われる。相対的な移動により、第3の部材40の傾斜セクション45、46が第1の部材20の傾斜セクション25、26と接触する。このことは、第1の部材20をスペーサ10の中心線から離れて外向きに移動させる。第3の部材40がさらに移動すると、傾斜セクションが互いに対して滑動し続け、第1の部材20が中心線から外向きに移動し続けて、スペーサ10の高さ全体を増加させる。
【0020】
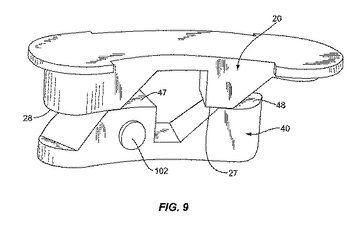
図9は、完全に展開した状態での開放位置での一実施形態を示している。第1の部材20上のセクション27、28は、第3の部材40のセクション47、48と接触し、その上に載っている。一実施形態では、セクション27、28、47、48は、スペーサ10が閉鎖方向に向かって移動するのを防止するために傾斜セクション25、26、45、46よりも小さい量だけ傾斜されている。傾斜セクション25、26、45、46は、同じ角度を有してもよい。
【0021】
スペーサ10の丸みを帯びた形状は、第1および第3の部材20、40の傾斜セクションのいくつかまたは全部が非対称形状を有する結果となる。図5に示した一実施形態では、傾斜セクション25、26は、第2の縁部14上よりも第1の縁部13上で短い長さを有する。同様に、第2の部材20の丸みを帯びた形状のため、傾斜セクション25、26は整列していない。図6は、第2の外縁よりも短い第1の内縁部を有する傾斜セクション45、46を示しており、傾斜した表面は整列していない。
【0022】
第1および第3の部材20、40の傾斜表面25、26、45、46の傾斜およびサイズは、開放位置でのスペーサ10の形状を変更するために変化してもよい。接触表面21および31が斜めであり、スペーサ10の一方の端部が他方の端部よりも大きい高さを有してもよく、または開放位置でほぼ平行であり、開放している勾配であってもよい。開放位置でのスペーサ10が、スパインの曲率に適合するような形状にされてもよい。
【0023】
一実施形態では、スペーサ10は、傾斜セクションをそれぞれ有する2つの部材を備え、第3の部材はない。第1の部材の傾斜セクションは、展開中、第2の部材の傾斜セクションと接触する。部材のそれぞれは、開放方向の接触のためのプラットホームセクションをさらに備えてもよい。
【0024】
スペーサ10は、第1および第2の方向の両方に伸長してもよい。第3の部材40は、第2の部材30の内部セクション39の傾斜セクションと接触する第2の側面42上の傾斜セクションを備える。一実施形態では、第3の部材40が移動する結果、第1の部材20および第2の部材30の両方がスペーサ10の中心線から外向きに移動する。
【0025】
別の実施形態は、傾斜セクション25、26、45、46の1つまたは複数が段付き形状を有することを特徴とする。段付き形状は、異なる角度に傾斜されたその周りに配置された1つまたは複数の段を有する傾斜セクションを特徴とする。段は、スペーサ10を異なる程度まで展開するために傾斜セクション25、26、45、46に沿って配置される。様々な段表面がセクション上に配置されてもよい。一実施形態では、傾斜セクション25、26、45、46はそれぞれ、閉鎖方向、第1の段上の第1の方向、第2の段上の第2の方向、および完全に展開された方向の間に配置可能なスペーサを有する2つの段差を備える。
【0026】
第1の部材20および第2の部材30はまた、単一の傾斜セクションをそれぞれ有してもよい。スペーサ10の運動は、単一の傾斜セクションが接触するという結果にしかならない。傾斜表面は、スペーサ10の長さに沿ったいかなる点に配置されてもよい。一実施形態では、支持表面が傾斜表面に隣接して配置されている。
【0027】
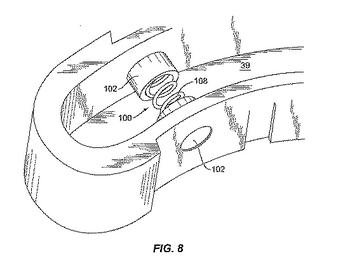
ロッキング部材100が、スペーサ10を特定の位置にロックしてもよい。図8に示すような一実施形態では、ロッキング部材100は、偏倚部材108によって強制的に離された1対のキャップ102を備える(図8は、わかりやすくするために第3の部材40を取り外している)。各キャップ102は、第1の部材20または第2の部材30内に配置された開口内に嵌合するようなサイズにされた延長部106を備える。一実施形態では、1対の開口35が、ロッキング部材100を受けるために第3の部材40上に配置されている。第3の部材40が第2の部材30に対して移動すると、ロッキング部材100が1つまたは複数の開口35内へ延びる。一実施形態では、開口は、スペーサ100が開放方向にあり且つ支持セクションが接触しているとき、キャップ102を受けるように配置されている。別の実施形態では、開口35は、傾斜表面が接触している間、キャップ102を受けるように配置されている。ロッキング部材100は、第3の部材40が外向きに滑動してスペーサのサイズを不本意に減少させることを防止する。傾斜セクション上に段差付き形状を有するスペーサ10では、開口の対が、スペーサを各段階でロックするように配置されている。一実施形態では、ロッキング機構100は、単一の開口内に嵌合する単一のキャップ102を備える。スペーサは、2002年8月28日に提出され、本出願と同じ出願人に譲渡され、その全体において参照により本明細書に組み込まれる、Minimally Invasive Expanding Spacer and Methodという題名の以前に提出された米国特許出願第10/229,560号に開示されている。
【0028】
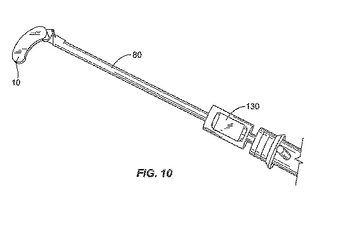
移送デバイス80は、患者体内にスペーサ10を配置するために機能する。移送デバイス80は、外科医が患者体内の椎骨部材の間にスペーサ10を配置するために細長い形状を有する。図12に示すような一実施形態では、移送デバイス80は、スペーサ10に取り付けられた遠端部および患者の外部に配置された近端部を備える細長い形状を有する。移送デバイス80は、用途に応じて様々な断面形状およびサイズを有してもよい。移送デバイス80は、単一の細長い部材で製造されてもよい、または異なる部分から製造されてもよい。
【0029】
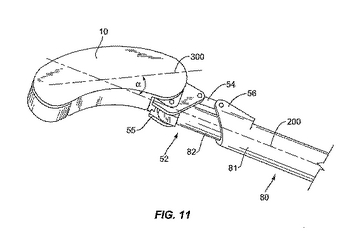
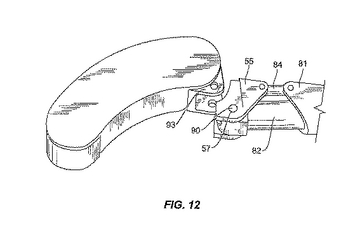
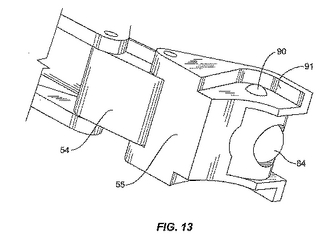
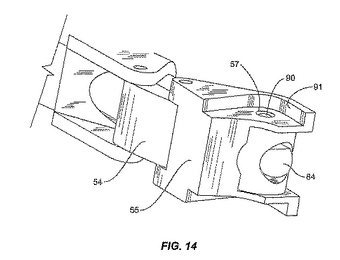
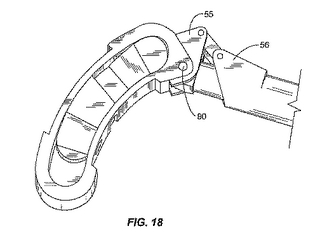
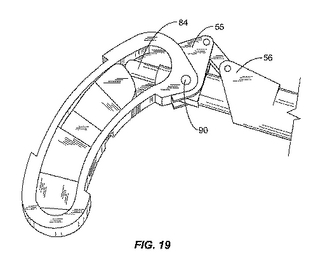
移送デバイス80は、枢動するようにしてスペーサに装着されてもよい。図11は、第1のシャフト81および第2のシャフト82を備える移送デバイス80の一実施形態を示している。ホルダ55が、シャフト82の遠端部に配置されている。ホルダ55は、それを通ってライブピボット90が延びている開口57を備える。一実施形態では、傾斜縁部91がスペーサ枠93と一致する。リンク54が、ホルダ55と第1のシャフト81の間に枢動自在に装着されている。第1のシャフト81は、ホルダ55をライブピボット90の周りに枢動させ、したがってスペーサ10を移送デバイス80に対して枢動させるように選択的に配置可能である。ブラケット56が、リンク54への取付のために第1のシャフト81の端部に形成されてもよい。
【0030】
一実施形態では、スペーサ10および移送デバイス80が、図11に示すように第1の方向に配置されている。スペーサ10の長手方向軸300は、移送デバイス80の長手方向軸200と鋭角αを形成する。この方向は、スペーサ10が最も非侵襲的な方式で患者体内に配置されるように、挿入処置中、スペーサ10の占有面積が減少されることを可能にする。一実施形態では、長手方向軸300が、長手方向200とほぼ並んでいてもよい(すなわち、角度αが約10度未満である)。
【0031】
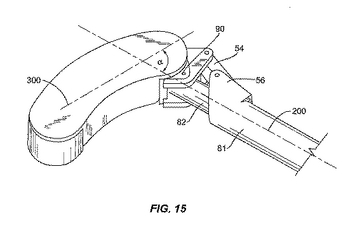
いったん椎骨部材の間に配置されると、スペーサ10は、図15に示すように移送デバイス80に対して枢動される。スペーサ10は、角度αが第1の方向から増加させられるようにして移送デバイス80に対して枢動される。一実施形態では、角度αは、約75〜110度の間の角度に増加させられる。一実施形態では、関節動作が、第1のシャフト81を第2のシャフト82に対して移動させることによって行われる。ホルダ55が、第2のシャフト82と接続され、第1のシャフト81の相対的な移動が、ホルダ55をピボット90の周りに枢動させる。シャフト81、82の相対移動の量は、関節動作の量または移送デバイス80に対するスペーサ10の角度に変換される。
【0032】
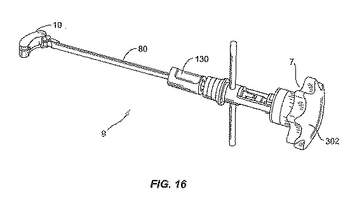
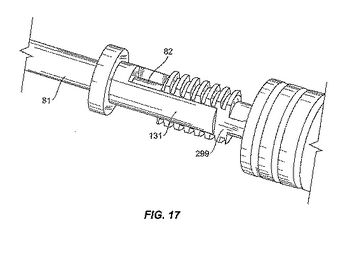
スペーサ10は、多種多様な方法で移送デバイス80に対して連接されてもよい。図16および17に示した一実施形態では、部材299が、シャフト82の近端部と軸方向に並べられている。一実施形態では、部材299は、ねじ付きセクションおよびねじなしセクションを備える。シャフト81の近端部は、ねじなしセクションに接して配置された延長部131を備える。シャフト81は、部材299に対して軸方向に移動する。駆動スリーブ130が、シャフト81と接続され、部材299を覆って配置されている。駆動スリーブ130は、部材299のねじ付きセクションとかみ合う内向きに配置されたねじを備える。駆動スリーブ130の回転が、シャフト81のシャフト82に対する軸方向運動を生じさせ、このようにしてスペーサ10を枢動させる。一実施形態では、駆動スリーブ130は、スリップリングによって第1のシャフト81に取り付けられている。
【0033】
いったん椎骨部材の間に正確に連接および配置されたあと、スペーサ10が閉鎖方向から開放方向に向かって展開される。展開手段が、スペーサ10を展開させるために移送デバイス80内に配置されている。一実施形態では、カム84が移送デバイス内に配置され、移送デバイス80の端部に隣接する遠端部と、展開器7の所に配置された近端部を備える。一実施形態では、カム84は、第2のシャフト82内に配置され、移送デバイス80を通って軸方向に運動させられる。
【0034】
カム84の動きが、図18および19に示されている。閉鎖方向では、移送デバイス80が、スペーサ10に取り付けられ、カム84が第1の位置にあり、第3の部材40がスペーサ10の近端部に配置されている。カム84は、第3の部材40をスペーサ10の遠端部に向かって移動させるために移送デバイス80内で軸方向に移動させられる。カム84の遠端部が、第3の部材40を押してスペーサ10を展開するために、第3の部材40の近端部と接触する。カム84の軸方向への移動量はスペーサの展開の量を制御する。第1の方向から第2の方向へのカム84の軸方向の移動は、第3の部材40を第1の部材20に対して移動させ、傾斜セクションを接触させて、スペーサの高さを増加させる。カム84の移動量は、スペーサの高さを制御する。カム84は、第3の部材40と動作可能に接続されている。これは、第3の部材40に取り付けられている、または取り付けられていないが駆動中第3の部材40と接触して配置されていることを意味する。
【0035】
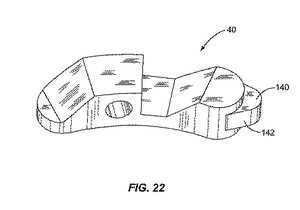
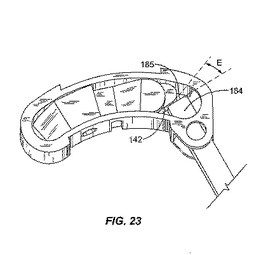
図22は、第3の部材40の別の実施形態を示している。この実施形態は、図4に示した前の実施形態と同様であり、突起140が近端部に追加されている。突起140は、展開中カム84の遠端部と接触される接触表面142を備える。図23は、接触表面142と接触する遠端部185を有するカム184の別の実施形態を示している。一実施形態では、遠端部185は、側縁部とほぼ垂直である。接触表面142および遠端部185は、2つの表面の間に形成される接触角Eが、展開中、できる限り小さく維持されるような形状にされている。また、展開中、遠端部185と接触表面142の間により大きな量の接触がある。カム184は、移送デバイス80の全部または一部に沿って延び、スペーサを伸長したサイズに展開させるためにスペーサと接触する遠端部185を備えるプッシュロッドを含む、様々な形状を有してもよい。
【0036】
第1および第2の部材しか有さない(すなわち、第3の部材がない)実施形態では、第1の部材は、傾斜表面を有する第2の部材と接触する傾斜表面を有する。カム84は、第1または第2の部材の一方と接触するように配置され、展開のために相対運動を供給する。
【0037】
図6および7は、カム84によって生じる第3の部材40の動きを示している。一実施形態では、第3の部材40は、図6に示すようにスペーサ10内で近位に配置されている。カム84の動きは、図7に示すように第3の部材40を遠位に移動させ、スペーサ10を展開させる。スペーサ10を減少させる1つの方法は、カム84を近位に移動させ、第3の部材40を引張ることによる。
【0038】
図1は、移送デバイス80および展開器7の一実施形態を示している。様々なタイプの展開器が、スペーサ10を伸長させるために移送デバイス80に付加されることができる。展開器は、スペーサ10に隣接して配置されてもよく、または患者の外にあるようにスペーサ10から離れて配置されてもよい。2002年6月25日に提出され、本出願と同じ出願人に譲渡されたMinimally Invasive Expanding Spacer and Methodという名称の以前に提出された米国特許出願第10/178,960号は、スペーサを開放方向に向かって展開するための展開器および構造を開示しており、その全体において参照により本明細書に組み込まれる。
【0039】
一実施形態では、展開器7が、移送デバイス80の近端部に取り付けられている。展開器7は、カム84に取り付けられたロック89に取り付けられている。展開器7は、移送デバイス80を通してカム84に軸方向の運動を供給する。一実施形態では、ノブ302が、接触部材とのねじ接続部を備える。ノブの回転が、接触部材をノブ302に対して外向きに運動させる。展開器7が移送デバイス80に装着されると、接触表面がロック89の近端部に当接する。ノブ302の回転により、接触部材が、ロック89したがってカム84を軸方向に運動させる。
【0040】
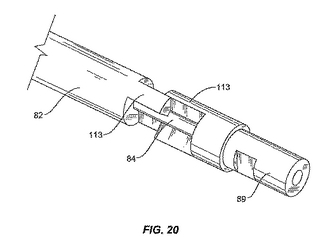
一実施形態では、カム84の軸方向への移動量が、制御される。図20は、シャフト82から軸方向のある距離に配置されたロック89を備える一実施形態を示している(すなわち、図20は引き込み位置でのカム84を示している)。展開器7の動きが、ロック89およびカム84をシャフト82に対して軸方向に移動させる。ロック89の遠端部がシャフト82の近端部と接触するとき、移動量は制限される。他の様々なタイプの展開機構が、カム84を軸方向に運動させ、スペーサ10を展開させるために使用されてもよい。
【0041】
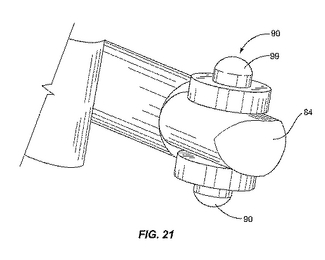
移送デバイス80は、様々な方式でスペーサ10に取り付けられてもよい。一実施形態では、スペーサ10は、開口37を通って延びる可動なライブピボット90を介して接続されている。ライブピボット90は、スペーサ10を移送デバイス80に接続する。脱着方向では、ライブピボット90は開口57の下へ移動させられ、移送デバイス80がスペーサ10から取り外される。一実施形態が図21で示されている。カム84が移送デバイス80を通って延びており、第2の寸法よりも大きい第1の寸法の延長形状を有する。ピボット90が、カム84に隣接して配置されている。取付方向では、カム90は、ピボット90に対して整列される大きなほうの寸法部分で方向付けられている。ピボット90は、カム84と接触し、開口57を通って外向きに延びている。取外し方向では、小さいほうの寸法部分がピボット90と接触するように、カム84が回転させられる。ピボット90が引っ込み、上縁部99が開口37から遠ざかるように移動する。一実施形態では、カム84が、約90°離されている大きいほうの寸法および小さいほうの寸法を有する構造にされる(すなわち、約90°のカム84の回転が、取付方向と取外し方向の間の運動を結果として生じさせる)。一実施形態では、ピボット90が、スペーサ10の取外しを容易にするために丸みを帯びた表面91を備える。一実施形態では、スペーサ10が移送デバイス80から取り外される前に、カム84が引き込まれる。取付、移送および展開デバイスおよび方法の実施形態が、2002年7月25日に提出され、本出願と同じ出願人に譲渡され、その全体において参照により本明細書に組み込まれる、Minimally Invasive Instruments and Method for Inserting Implantsという名称の以前に提出された米国特許出願第10/202,918号に開示されている。
【0042】
一実施形態では、カム84が、移送デバイス80の一部を通って延びて、移送デバイス80の近端部に向かってアクセスされる。装置9を使用する外科医は、スペーサ10を移送デバイス80から取り外すために、カム84を患者の外の点から回転させる。カム84がシャフト82を通って延び、ロック89に取り付けられている一実施形態が、図20に示されている。ロック89は、カム84に固定取り付けされ、ロック89の回転がカム84の回転を生じさせる。シャフト82の近端部とロック89の遠端部は、カムの回転の量を制御する対応する指部113を有する。指部113が接触し、さらなる回転を防止するため、ロック89のシャフト82に対する回転は所定の範囲に制限される。一実施形態では、指部113が、回転を約90°に制限するように配置されている。その全体において参照により本明細書に組み込まれる、以前に提出された米国特許出願第10/178,960号が、いくつかの異なるタイプの移送デバイスおよびスペーサを制御するための構造を開示している。
【0043】
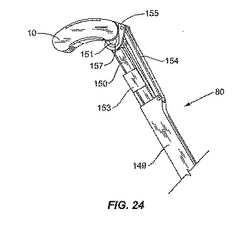
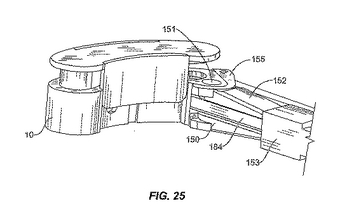
図24および25は、スペーサ10を移送デバイス80から外すための取外しデバイスの別の実施形態を示している。移送デバイス80は、遠端部にチューブスリーブ150を備える駆動スリーブ149を備える。所定の幅を有する解放スリーブ153が、チューブスリーブ150上に滑動可能に配置されている。プッシュロッド184が、チューブスリーブ150内に延びており、スペーサ10を展開させる遠端部185を備える。延長部151が、チューブスリーブ150の遠端部に向かって配置され、ホルダ155の開口157、およびスペーサ10内の開口37内に装着されている。スペーサ10は、移送デバイス80と接続されると、延長部151の周りに枢動する。リンク154が、ホルダ155と駆動スリーブ149との間に延びている。駆動スリーブ149のチューブスリーブ150に対する相対運動がスペーサを枢動させる。
【0044】
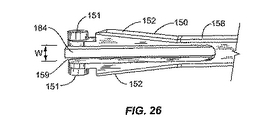
図26に示すように、チューブスリーブ150は、1つまたは複数の傾斜表面152を有する遠端部を備える。傾斜表面152は、延長部151に隣接する点で最大の高さまでチューブスリーブ150に沿って徐々に高さが増加する。スロット159が、傾斜表面152の間のチューブスリーブ150の遠端部上に形成されている。スロット159は、延長部151がスペーサ10に装着されているとき、幅wを有する。
【0045】
解放スリーブ153は、チューブスリーブ150上に滑動自在に装着されている。解放スリーブ153は、傾斜表面152から離れたチューブスリーブ150の第1のセクション158の幅よりも大きいが、傾斜表面152の幅よりも小さい所定の幅を有する。
【0046】
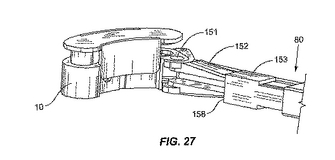
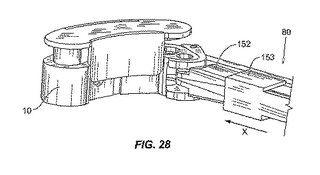
図27および28は、移送デバイス80のスペーサ10からの取外しを示している。図27では、スペーサ10は、延長部151がホルダ155およびスペーサ10を通って配置されるとき、移送デバイス80に接続される。解放スリーブ153は、チューブスリーブ152の第1のセクション158上に延長部から離れて配置される。図28は、移送デバイス80から取り外されつつあるスペーサ10を示している。解放スリーブ153が、チューブスリーブ150の傾斜表面152に沿って矢印xの方向に遠位に移動される。これにより、傾斜表面152を内向きに押しやり、したがって幅wを減少させる。同様にチューブスリーブ150の遠端部に装着された延長部151が、内側に押しやられ、スペーサ10から取り外される。この点で、スペーサ10が移送デバイス80から除去できる。ホルダ155は、移送デバイス80に取り付けられたままであり、患者体内にスペーサ10のみを残して取り外される。
【0047】
一実施形態では、プッシュロッド184が、チューブスリーブ150内のスロット159を通って延びており、スペーサ10が取り外されるのを防止する。プッシュロッド184がスロット159内にある間、傾斜表面152は、互いに押し付けられるのを防止され、したがって延長部151がスペーサ10内に留まる。いったんプッシュロッド184が取り外されると(すなわち「−X」方向に移動されると)、傾斜表面152が互いに押し付けられることができ、幅wがスペーサ10から延長部151を取り外すために減少される。別の実施形態では、開口159の幅wが減少されてスペーサが取り外し可能となるように、プッシュロッド184と傾斜表面との間に十分な隙間がある。一実施形態では、外科医が離れた位置からスペーサ10を解放することを可能にするために、アタッチメントが、解放スリーブ153から移送デバイス80の近端部に向かって延びてもよい。
【0048】
別の実施形態では、移送デバイス80が、いったんスペーサ10が展開されると壊れるように設計されたせん断可能なピンを介してスペーサ10に取り付けられてもよい。いったんピンがせん断されると、移送デバイス80がスペーサ10から取り外される。別の実施形態では、移送デバイス80がねじによってスペーサ10に取り付けられている。移送デバイス80のスペーサ10に対する回転が、スペーサをデバイス80から外させる。別の実施形態では、移送デバイス80およびスペーサ10が、移送デバイス80のスペーサ10に対する回転が取外しを生じさせるような半回転ロッキングシステムを備える。
【0049】
移送デバイス80は、使用中スペーサ10に取り付けられたままであっても、スペーサから取り外されてもよい。移送デバイス80の除去は、移送デバイス80が他の機器の邪魔になり、またはスペーサ10に取り付けられたまま残されている場合視界の邪魔になるため、処置中に外科医のための追加の作業空間を設けることを必要とする。この使用法ではさらに、移送デバイス80が、処置の終わりで、患者からの除去のためにスペーサ10に再び取り付けられてもよい。別の使用法では、移送デバイス80が取り外され、スペーサ10が患者体内に恒久的に留まる。
【0050】
一実施形態では、カム84がシャフト82を通って延び、ロック機構89に装着された近端部を備える。一実施形態では、カム84はロックに接続されていない。一実施形態では、カム84はシャフト82内で軸方向に移動可能であり且つ回転可能である。一実施形態では、第2のシャフト82が第1のシャフト81内に装着されている。一実施形態では、第1のシャフト81が、第2のシャフト82の外部に沿って滑動するようなサイズにされている。一実施形態では、第2のシャフト82が、関節動作および展開プロセス中、軸方向に静止している。一実施形態では、部材200が、関節動作プロセス中、静止している。
【0051】
椎骨部材という用語は、椎体、椎弓根、椎弓板および棘突起を含む椎骨幾何形状を記載するために全体的に使用されている。スペーサ10は、頚部、胸部、および腰部領域を含む椎骨の異なる領域内で使用されるような、サイズおよび形状に形成され且つ十分な強度要件を有するように形成してもよい。一実施形態では、スペーサ10は、約8806N(約2000ポンド重)の耐荷重を有する。
【0052】
スペーサは、隣接する椎骨の間の椎間空間内に配置されてもよい。接触表面21、31が、必要に応じて椎骨の間隔を空けるために椎骨の終板に接触する。スペーサ10は、患者体内に後方から、前方から、または側方から挿入できる。
【0053】
接触表面21、31は、スペーサ10内への骨の成長を可能にするために穴があけられていてもよい。接触表面21、31の一方または両方が、1つまたは複数の開口を備えてもよい。骨成長材料が、インプラント全体を通しての骨の成長に対処するために開口内に配置されてもよい。骨成長材料は、骨形成蛋白質(BMP)、LIM無機蛋白質(LMP)を含浸された、スポンジ、基質、および/またはその他のキャリアであってもよい。
【0054】
一実施形態では、スペーサ10が1対のレバーを使用して展開される。一実施形態では、スペーサは、はさみと同様の1対の偏移アームを有する機器によって展開される。
本発明は、本発明の範囲および本質的な特徴から逸脱することなく、ここに説明した以外の他の特定の方式で実行されてもよい。一実施形態では、スペーサ10および移送デバイス80がステンレス鋼で製造されている。一実施形態では、支持セクションが、傾斜表面の遠位に配置されている。一実施形態では、カム184、84がプッシュロッドである。一実施形態では、偏倚部材108がコイルばねである。一実施形態では、スペーサ10が開放方向にあるとき、部材の傾斜表面が接触する。一実施形態では、第2の部材30が側壁33を備えず、第3の部材40が第2の部材30よりも小さい、またはそれと等しい幅を有する。一実施形態では、スペーサ10がチタニウムで製造されている。一実施形態では、スペーサ内の開口37が直径約3.5mmである。本実施形態は、したがって、すべての点で限定的ではなく、例示的であるとみなされるものであり、頭記の特許請求の範囲の意図するものおよび等価な範囲が、ここに包含されることが、意図されている。
【図面の簡単な説明】
【0055】
【図1】本発明の一実施形態の透視図である。
【図2】本発明の一実施形態による閉鎖方向にあるスペーサの透視図である。
【図3】本発明の一実施形態による開放方向にあるスペーサの透視図である。
【図4】本発明の一実施形態によるスペーサの分解透視図である。
【図5】本発明の一実施形態による第1の部材の透視図である。
【図6】本発明の一実施形態による第2の部材内の第1の位置にある第3の部材の透視図である。
【図7】本発明の一実施形態による第2の部材内の第2の位置にある第3の部材の透視図である。
【図8】本発明の一実施形態によるロッキング機構の部分切断透視図である。
【図9】本発明の一実施形態による第2の部材と接触する第1の部材の透視図である。
【図10】本発明の一実施形態による移送デバイスに対して傾斜されたスペーサの部分透視図である。
【図11】本発明の一実施形態による移送デバイスに対して傾斜されたスペーサの別の実施形態の部分透視図である。
【図12】本発明の一実施形態による移送デバイスから分離されたスペーサの部分透視図である。
【図13】本発明の一実施形態による第1の方向にあるホルダおよび枢軸の部分透視図である。
【図14】本発明の一実施形態による第2の方向にあるホルダおよび枢軸の部分透視図である。
【図15】本発明の一実施形態による移送デバイスに対して傾斜されたスペーサの別の実施形態の部分透視図である。
【図16】本発明の一実施形態による本発明の透視図である。
【図17】本発明の一実施形態によるデバイスのセクションの部分透視図である。
【図18】本発明の一実施形態による第2の部材内の第1の位置にある第3の部材の部分透視図である。
【図19】本発明の一実施形態による第2の部材内の第2の位置にある第3の部材の部分透視図である。
【図20】本発明の一実施形態によるロックの部分透視図である。
【図21】本発明の一実施形態によるライブピボットの部分透視図である。
【図22】本発明の一実施形態に従って製造された第3の部材の別の実施形態の透視図である。
【図23】本発明の一実施形態に従って製造された第3の部材と接触するカムの部分透視図である。
【図24】本発明の一実施形態に従って製造された別の移送デバイスおよび解放機構の部分透視図である。
【図25】本発明の一実施形態に従って製造された移送デバイスに取り付けられスペーサの部分透視図である。
【図26】本発明の一実施形態に従って製造されたチューブスリーブおよびカムの部分透視図である。
【図27】本発明の一実施形態に従って製造された移送デバイスに取り付けられたスペーサの部分透視図である。
【図28】本発明の一実施形態に従って製造された移送デバイスから脱着されたスペーサの部分透視図である。
【技術分野】
【0001】
本発明は、隣接する椎骨部材間に配置するためのデバイスに関する。
【背景技術】
【0002】
本出願は、2003年2月3日に提出された米国特許仮出願第60/444,561号の米国特許法第35条に基づく優先権を主張する。この出願は、参照によってその全体において本明細書に特に組み込まれる。
【0003】
様々なデバイスが、椎骨部材の間隔を制御するために使用されている。これらのデバイスは、椎骨部材の特定の表面にアクセスすることが必要である外科手術中などに、一時的な基礎の上で使用されてもよい。1つの例は、椎骨部材のエンドプレートを準備することを含む。デバイスはまた、椎骨部材を離隔させるために患者体内に恒久的に留まってもよい。
【0004】
最も侵襲的でない方式で椎骨部材の間でデバイスを配置することが困難であることがよくある。小さいデバイスが、患者体内の椎骨部材の間に最も非侵襲的な方式で挿入されてもよい。しかし、小さいサイズは、椎骨部材を効果的に離隔させるのに十分でないことがある。より大きなデバイスが、椎骨部材を離隔させるのに効果的であるが、患者体内の椎骨部材の間に最も非侵襲的な方式で挿入することができない。
【発明の開示】
【課題を解決するための手段】
【0005】
本発明は、隣接する椎骨部材間に配置するデバイスに関するものである。一実施形態では、デバイスは、一般にスペーサ、移送デバイスおよび展開器を90%備える。スペーサは、隣接する椎骨部材間に配置され、閉鎖方向、開放方向、およびそれらの間の段階で選択的に調節可能である。移送デバイスが、患者体内にスペーサを配置し、展開器が、スペーサを選択された方向に移動させる。
【0006】
一実施形態では、スペーサは、最小の高さを有する第1の方向と、最大の高さを有する第2の方向との間で選択的に配置可能であり、またその間で選択された位置に配置可能である。デバイスは、第1の方向に延びる第1の傾斜表面を有する第1の部材と、第2の方向に延びる第2の傾斜表面を有する第2の部材とを備えてもよい。第1の部材が第2の部材に対して移動すると、傾斜表面が互いに接触し、スペーサのサイズが増加する。デバイスは、処置が完了したとき患者から取り外されることができるように移送デバイス上に配置されてもよく、または、恒久的にまたは所定の期間に亘ってのいずれかで、患者体内に留まるために移送デバイスから取外し可能であってもよい。
【0007】
デバイスを使用する一実施形態では、デバイスは、2つの椎骨部材の間に配置される。配置中、デバイスは、挿入を容易にし、患者に対して最も非侵襲的であるように、小さなサイズを有する閉鎖方向にある。スペーサは、椎骨部材の間にスペーサを配置するために移送デバイスに対して傾斜されてもよい。いったん配置されたあと、スペーサのセクションが、傾斜表面が互いに接触するように、互いに対して移動される。部材の接触および移動はスペーサの全体的高さを高める。スペーサは、用途に応じて様々な高さに配置されてもよい。いくつかの実施形態では、スペーサは、ある高さにスペーサをロックし、スペーサが閉鎖するのを防止するためのロッキング手段を備える。
【発明を実施するための最良の形態】
【0008】
本発明は、隣接する椎骨部材の間に配置するためのデバイスを目的としている。図1は、スペーサ10と、移送デバイス80と展開器7を備える、全体として符号9で示される一実施形態を示している。スペーサ10は、隣接する椎骨部材の間に配置され、閉鎖方向、開放方向およびそれらの間の段階の間で選択的に調節可能である。移送デバイス80は、スペーサを患者体内に配置するために機能する。展開器7は、スペーサを選択された延伸方向に移動させる。
【0009】
スペーサ10は、用途に応じて、細長形状、曲線形状などの様々な形状およびサイズを有する。スペーサ10は、椎骨部材の間で患者体内に挿入されたとき、最も非侵襲的となるように小さなサイズを有する図2に示すような第1の位置の間で調節可能である。図3は、スペーサ10が椎骨部材と接触するように伸延された第2の位置を示している。スペーサ10は、所望の用途に応じて様々な異なる高さに伸延可能である。
【0010】
図2および3は、丸みを帯びた形状を有する第1の遠端部11および第2の近端部12を有する曲線的なエンドウ豆形状を有するスペーサ10の一実施形態を示している。第1および第2の側面13、14は湾曲している。スペーサ10は、ほぼ一定の幅を有してもよく、ある特定の実施形態は約33mmの幅を有する。スペーサ10の高さは、伸延量に応じて様々であり、以下で詳細に説明するように傾斜表面の角度によって決定される。ある特定の実施形態では、スペーサ10は、約9mmから約13mmの範囲の高さを有する。ある実施形態では、スペーサ10は、椎骨部材の寸法に適合するように、閉鎖、開放または展開方向のうちの1つまたは複数の方向に傾斜されている。
【0011】
図4は、第1の部材20、第2の部材30および第3の部材40を備えるスペーサ10の一実施形態を示している。それぞれ椎骨部材と接触するために、第1の部材20は、接触表面21を備え、第2の部材30は、接触表面31を備える。接触表面21、31は、ほぼ滑らかである、または椎骨部材と接触するように隆起またはこぶなどの安定構造を有してもよい。
【0012】
第1および第2の部材20、30は、閉鎖方向で互いにかみ合うように相補的な形状を有する。部材20、30の外縁部22、32は、スペーサ10の全体サイズを低減させるために閉鎖方向に配置されている。外縁部32は、スペーサ10が閉鎖方向にあるとき、接触表面21の内縁部と接触または離隔される。側壁23、33が接触表面から延びており、スペーサ10の全体形状を定義するために様々な異なる形状およびサイズを有する。
【0013】
図5は、第1の部材20の下側面の一実施形態を示している。側壁23が、第2の部材30とかみ合うように外向きに延びている。タブ29が、展開中、スペーサ10が開放方向にあるとき、さらに安定させるために第2の部材の側壁33内の溝とかみ合うように側壁23の1つから外向きに延びてもよい。タブ29は、スペーサ10の展開中、第1の部材20が第2の部材30から分離するのを防止するために溝の上縁部(図18参照)と接触する。
【0014】
第1の部材20は、第1の傾斜セクション25と支持セクション27、および第2の傾斜セクション26と支持セクション28を備える。傾斜セクション25、26は、様々な長さを有してもよく、接触表面21に対して様々な角度で配置することができる。一実施形態では、セクション25、26と接触表面21の間の角度の範囲は、約20°から約40°の間である。支持セクション27、28は、傾斜セクション25、26と隣接して配置され、傾斜セクション25、26に対して異なる角度で配置されている。一実施形態では、支持セクション27、28は、接触表面21とほぼ平行である。
【0015】
第2の部材30の形状は、第1の部材20に対応している。側壁33が、第1の部材20と整列するように第2の部材30の一部分または全体の周りに延びており、第3の部材40を維持するための内部セクションを形成している。内部セクション39が、接触表面31と対向する側壁33内に形成されている。図7および図8に示すような一実施形態では、内部セクション39は、第3の部材40の相対運動を容易にするために、ほぼ平坦であり、滑らかである。枠93は、第2の部材30から延びていてもよい。枠93上に配置された開口37が、以下で説明するように移送デバイス80の取付を可能にする。
【0016】
第3の部材40は、第1の部材20と第2の部材30との間に配置されている。第3の部材40は、第1の部材20と組合わせられる傾斜セクション45,46を有する第1の側面41と、第2の部材30と接触する第2の側面42とを備える。第1の側面41の一実施形態が図4に示されており、第1の傾斜セクション45とそれに隣接する支持セクション47、および第2の傾斜セクション46と支持セクション48を備える。傾斜セクション45、46は、様々な長さを有してもよく、第2の側面42に対して様々な角度で配置することができる。一実施形態では、セクション45、46と第2の側面41との間の角度の範囲は、約20°から約40°の間である。支持セクション47、48が、傾斜セクション45、46に対して異なる角度で配置されている。一実施形態では、支持セクション47、48は、第2の側面42とほぼ平行である。一実施形態では、第2の側面42は、内部セクション39の平坦な表面に対応する平面である。
【0017】
第3の部材40は、第2の部材30の側壁33によって形成された境界面以下の幅および長さを有してもよい。小さいサイズは、第3の部材40の第2の部材30に対する滑動運動を可能にする。第2および第3の部材30、40の相対的な位置が図6および7に示されている。図6は、第3の部材40が第2の部材30の近位の縁部に接して配置されている第1の位置を示している。図7は、第3の部材40が第2の部材30の遠位の縁部に接して配置されている第2の位置を示している。
【0018】
第3の部材40は、スペーサ10を閉鎖方向から開放方向へ展開させるために第1および第2の部材20、30に対して移動する。スペーサ10は、患者体内の椎骨部材の間への配置を容易にするために最小のサイズおよび形状を有する閉鎖方向で患者体内に配置されてもよい。第1および第3の部材20、40の傾斜セクション25、26、45、46は、閉鎖方向で分離される。
【0019】
スペーサ10の展開は、第3の部材40が第1の部材20に対して移動することによって行われる。相対的な移動により、第3の部材40の傾斜セクション45、46が第1の部材20の傾斜セクション25、26と接触する。このことは、第1の部材20をスペーサ10の中心線から離れて外向きに移動させる。第3の部材40がさらに移動すると、傾斜セクションが互いに対して滑動し続け、第1の部材20が中心線から外向きに移動し続けて、スペーサ10の高さ全体を増加させる。
【0020】
図9は、完全に展開した状態での開放位置での一実施形態を示している。第1の部材20上のセクション27、28は、第3の部材40のセクション47、48と接触し、その上に載っている。一実施形態では、セクション27、28、47、48は、スペーサ10が閉鎖方向に向かって移動するのを防止するために傾斜セクション25、26、45、46よりも小さい量だけ傾斜されている。傾斜セクション25、26、45、46は、同じ角度を有してもよい。
【0021】
スペーサ10の丸みを帯びた形状は、第1および第3の部材20、40の傾斜セクションのいくつかまたは全部が非対称形状を有する結果となる。図5に示した一実施形態では、傾斜セクション25、26は、第2の縁部14上よりも第1の縁部13上で短い長さを有する。同様に、第2の部材20の丸みを帯びた形状のため、傾斜セクション25、26は整列していない。図6は、第2の外縁よりも短い第1の内縁部を有する傾斜セクション45、46を示しており、傾斜した表面は整列していない。
【0022】
第1および第3の部材20、40の傾斜表面25、26、45、46の傾斜およびサイズは、開放位置でのスペーサ10の形状を変更するために変化してもよい。接触表面21および31が斜めであり、スペーサ10の一方の端部が他方の端部よりも大きい高さを有してもよく、または開放位置でほぼ平行であり、開放している勾配であってもよい。開放位置でのスペーサ10が、スパインの曲率に適合するような形状にされてもよい。
【0023】
一実施形態では、スペーサ10は、傾斜セクションをそれぞれ有する2つの部材を備え、第3の部材はない。第1の部材の傾斜セクションは、展開中、第2の部材の傾斜セクションと接触する。部材のそれぞれは、開放方向の接触のためのプラットホームセクションをさらに備えてもよい。
【0024】
スペーサ10は、第1および第2の方向の両方に伸長してもよい。第3の部材40は、第2の部材30の内部セクション39の傾斜セクションと接触する第2の側面42上の傾斜セクションを備える。一実施形態では、第3の部材40が移動する結果、第1の部材20および第2の部材30の両方がスペーサ10の中心線から外向きに移動する。
【0025】
別の実施形態は、傾斜セクション25、26、45、46の1つまたは複数が段付き形状を有することを特徴とする。段付き形状は、異なる角度に傾斜されたその周りに配置された1つまたは複数の段を有する傾斜セクションを特徴とする。段は、スペーサ10を異なる程度まで展開するために傾斜セクション25、26、45、46に沿って配置される。様々な段表面がセクション上に配置されてもよい。一実施形態では、傾斜セクション25、26、45、46はそれぞれ、閉鎖方向、第1の段上の第1の方向、第2の段上の第2の方向、および完全に展開された方向の間に配置可能なスペーサを有する2つの段差を備える。
【0026】
第1の部材20および第2の部材30はまた、単一の傾斜セクションをそれぞれ有してもよい。スペーサ10の運動は、単一の傾斜セクションが接触するという結果にしかならない。傾斜表面は、スペーサ10の長さに沿ったいかなる点に配置されてもよい。一実施形態では、支持表面が傾斜表面に隣接して配置されている。
【0027】
ロッキング部材100が、スペーサ10を特定の位置にロックしてもよい。図8に示すような一実施形態では、ロッキング部材100は、偏倚部材108によって強制的に離された1対のキャップ102を備える(図8は、わかりやすくするために第3の部材40を取り外している)。各キャップ102は、第1の部材20または第2の部材30内に配置された開口内に嵌合するようなサイズにされた延長部106を備える。一実施形態では、1対の開口35が、ロッキング部材100を受けるために第3の部材40上に配置されている。第3の部材40が第2の部材30に対して移動すると、ロッキング部材100が1つまたは複数の開口35内へ延びる。一実施形態では、開口は、スペーサ100が開放方向にあり且つ支持セクションが接触しているとき、キャップ102を受けるように配置されている。別の実施形態では、開口35は、傾斜表面が接触している間、キャップ102を受けるように配置されている。ロッキング部材100は、第3の部材40が外向きに滑動してスペーサのサイズを不本意に減少させることを防止する。傾斜セクション上に段差付き形状を有するスペーサ10では、開口の対が、スペーサを各段階でロックするように配置されている。一実施形態では、ロッキング機構100は、単一の開口内に嵌合する単一のキャップ102を備える。スペーサは、2002年8月28日に提出され、本出願と同じ出願人に譲渡され、その全体において参照により本明細書に組み込まれる、Minimally Invasive Expanding Spacer and Methodという題名の以前に提出された米国特許出願第10/229,560号に開示されている。
【0028】
移送デバイス80は、患者体内にスペーサ10を配置するために機能する。移送デバイス80は、外科医が患者体内の椎骨部材の間にスペーサ10を配置するために細長い形状を有する。図12に示すような一実施形態では、移送デバイス80は、スペーサ10に取り付けられた遠端部および患者の外部に配置された近端部を備える細長い形状を有する。移送デバイス80は、用途に応じて様々な断面形状およびサイズを有してもよい。移送デバイス80は、単一の細長い部材で製造されてもよい、または異なる部分から製造されてもよい。
【0029】
移送デバイス80は、枢動するようにしてスペーサに装着されてもよい。図11は、第1のシャフト81および第2のシャフト82を備える移送デバイス80の一実施形態を示している。ホルダ55が、シャフト82の遠端部に配置されている。ホルダ55は、それを通ってライブピボット90が延びている開口57を備える。一実施形態では、傾斜縁部91がスペーサ枠93と一致する。リンク54が、ホルダ55と第1のシャフト81の間に枢動自在に装着されている。第1のシャフト81は、ホルダ55をライブピボット90の周りに枢動させ、したがってスペーサ10を移送デバイス80に対して枢動させるように選択的に配置可能である。ブラケット56が、リンク54への取付のために第1のシャフト81の端部に形成されてもよい。
【0030】
一実施形態では、スペーサ10および移送デバイス80が、図11に示すように第1の方向に配置されている。スペーサ10の長手方向軸300は、移送デバイス80の長手方向軸200と鋭角αを形成する。この方向は、スペーサ10が最も非侵襲的な方式で患者体内に配置されるように、挿入処置中、スペーサ10の占有面積が減少されることを可能にする。一実施形態では、長手方向軸300が、長手方向200とほぼ並んでいてもよい(すなわち、角度αが約10度未満である)。
【0031】
いったん椎骨部材の間に配置されると、スペーサ10は、図15に示すように移送デバイス80に対して枢動される。スペーサ10は、角度αが第1の方向から増加させられるようにして移送デバイス80に対して枢動される。一実施形態では、角度αは、約75〜110度の間の角度に増加させられる。一実施形態では、関節動作が、第1のシャフト81を第2のシャフト82に対して移動させることによって行われる。ホルダ55が、第2のシャフト82と接続され、第1のシャフト81の相対的な移動が、ホルダ55をピボット90の周りに枢動させる。シャフト81、82の相対移動の量は、関節動作の量または移送デバイス80に対するスペーサ10の角度に変換される。
【0032】
スペーサ10は、多種多様な方法で移送デバイス80に対して連接されてもよい。図16および17に示した一実施形態では、部材299が、シャフト82の近端部と軸方向に並べられている。一実施形態では、部材299は、ねじ付きセクションおよびねじなしセクションを備える。シャフト81の近端部は、ねじなしセクションに接して配置された延長部131を備える。シャフト81は、部材299に対して軸方向に移動する。駆動スリーブ130が、シャフト81と接続され、部材299を覆って配置されている。駆動スリーブ130は、部材299のねじ付きセクションとかみ合う内向きに配置されたねじを備える。駆動スリーブ130の回転が、シャフト81のシャフト82に対する軸方向運動を生じさせ、このようにしてスペーサ10を枢動させる。一実施形態では、駆動スリーブ130は、スリップリングによって第1のシャフト81に取り付けられている。
【0033】
いったん椎骨部材の間に正確に連接および配置されたあと、スペーサ10が閉鎖方向から開放方向に向かって展開される。展開手段が、スペーサ10を展開させるために移送デバイス80内に配置されている。一実施形態では、カム84が移送デバイス内に配置され、移送デバイス80の端部に隣接する遠端部と、展開器7の所に配置された近端部を備える。一実施形態では、カム84は、第2のシャフト82内に配置され、移送デバイス80を通って軸方向に運動させられる。
【0034】
カム84の動きが、図18および19に示されている。閉鎖方向では、移送デバイス80が、スペーサ10に取り付けられ、カム84が第1の位置にあり、第3の部材40がスペーサ10の近端部に配置されている。カム84は、第3の部材40をスペーサ10の遠端部に向かって移動させるために移送デバイス80内で軸方向に移動させられる。カム84の遠端部が、第3の部材40を押してスペーサ10を展開するために、第3の部材40の近端部と接触する。カム84の軸方向への移動量はスペーサの展開の量を制御する。第1の方向から第2の方向へのカム84の軸方向の移動は、第3の部材40を第1の部材20に対して移動させ、傾斜セクションを接触させて、スペーサの高さを増加させる。カム84の移動量は、スペーサの高さを制御する。カム84は、第3の部材40と動作可能に接続されている。これは、第3の部材40に取り付けられている、または取り付けられていないが駆動中第3の部材40と接触して配置されていることを意味する。
【0035】
図22は、第3の部材40の別の実施形態を示している。この実施形態は、図4に示した前の実施形態と同様であり、突起140が近端部に追加されている。突起140は、展開中カム84の遠端部と接触される接触表面142を備える。図23は、接触表面142と接触する遠端部185を有するカム184の別の実施形態を示している。一実施形態では、遠端部185は、側縁部とほぼ垂直である。接触表面142および遠端部185は、2つの表面の間に形成される接触角Eが、展開中、できる限り小さく維持されるような形状にされている。また、展開中、遠端部185と接触表面142の間により大きな量の接触がある。カム184は、移送デバイス80の全部または一部に沿って延び、スペーサを伸長したサイズに展開させるためにスペーサと接触する遠端部185を備えるプッシュロッドを含む、様々な形状を有してもよい。
【0036】
第1および第2の部材しか有さない(すなわち、第3の部材がない)実施形態では、第1の部材は、傾斜表面を有する第2の部材と接触する傾斜表面を有する。カム84は、第1または第2の部材の一方と接触するように配置され、展開のために相対運動を供給する。
【0037】
図6および7は、カム84によって生じる第3の部材40の動きを示している。一実施形態では、第3の部材40は、図6に示すようにスペーサ10内で近位に配置されている。カム84の動きは、図7に示すように第3の部材40を遠位に移動させ、スペーサ10を展開させる。スペーサ10を減少させる1つの方法は、カム84を近位に移動させ、第3の部材40を引張ることによる。
【0038】
図1は、移送デバイス80および展開器7の一実施形態を示している。様々なタイプの展開器が、スペーサ10を伸長させるために移送デバイス80に付加されることができる。展開器は、スペーサ10に隣接して配置されてもよく、または患者の外にあるようにスペーサ10から離れて配置されてもよい。2002年6月25日に提出され、本出願と同じ出願人に譲渡されたMinimally Invasive Expanding Spacer and Methodという名称の以前に提出された米国特許出願第10/178,960号は、スペーサを開放方向に向かって展開するための展開器および構造を開示しており、その全体において参照により本明細書に組み込まれる。
【0039】
一実施形態では、展開器7が、移送デバイス80の近端部に取り付けられている。展開器7は、カム84に取り付けられたロック89に取り付けられている。展開器7は、移送デバイス80を通してカム84に軸方向の運動を供給する。一実施形態では、ノブ302が、接触部材とのねじ接続部を備える。ノブの回転が、接触部材をノブ302に対して外向きに運動させる。展開器7が移送デバイス80に装着されると、接触表面がロック89の近端部に当接する。ノブ302の回転により、接触部材が、ロック89したがってカム84を軸方向に運動させる。
【0040】
一実施形態では、カム84の軸方向への移動量が、制御される。図20は、シャフト82から軸方向のある距離に配置されたロック89を備える一実施形態を示している(すなわち、図20は引き込み位置でのカム84を示している)。展開器7の動きが、ロック89およびカム84をシャフト82に対して軸方向に移動させる。ロック89の遠端部がシャフト82の近端部と接触するとき、移動量は制限される。他の様々なタイプの展開機構が、カム84を軸方向に運動させ、スペーサ10を展開させるために使用されてもよい。
【0041】
移送デバイス80は、様々な方式でスペーサ10に取り付けられてもよい。一実施形態では、スペーサ10は、開口37を通って延びる可動なライブピボット90を介して接続されている。ライブピボット90は、スペーサ10を移送デバイス80に接続する。脱着方向では、ライブピボット90は開口57の下へ移動させられ、移送デバイス80がスペーサ10から取り外される。一実施形態が図21で示されている。カム84が移送デバイス80を通って延びており、第2の寸法よりも大きい第1の寸法の延長形状を有する。ピボット90が、カム84に隣接して配置されている。取付方向では、カム90は、ピボット90に対して整列される大きなほうの寸法部分で方向付けられている。ピボット90は、カム84と接触し、開口57を通って外向きに延びている。取外し方向では、小さいほうの寸法部分がピボット90と接触するように、カム84が回転させられる。ピボット90が引っ込み、上縁部99が開口37から遠ざかるように移動する。一実施形態では、カム84が、約90°離されている大きいほうの寸法および小さいほうの寸法を有する構造にされる(すなわち、約90°のカム84の回転が、取付方向と取外し方向の間の運動を結果として生じさせる)。一実施形態では、ピボット90が、スペーサ10の取外しを容易にするために丸みを帯びた表面91を備える。一実施形態では、スペーサ10が移送デバイス80から取り外される前に、カム84が引き込まれる。取付、移送および展開デバイスおよび方法の実施形態が、2002年7月25日に提出され、本出願と同じ出願人に譲渡され、その全体において参照により本明細書に組み込まれる、Minimally Invasive Instruments and Method for Inserting Implantsという名称の以前に提出された米国特許出願第10/202,918号に開示されている。
【0042】
一実施形態では、カム84が、移送デバイス80の一部を通って延びて、移送デバイス80の近端部に向かってアクセスされる。装置9を使用する外科医は、スペーサ10を移送デバイス80から取り外すために、カム84を患者の外の点から回転させる。カム84がシャフト82を通って延び、ロック89に取り付けられている一実施形態が、図20に示されている。ロック89は、カム84に固定取り付けされ、ロック89の回転がカム84の回転を生じさせる。シャフト82の近端部とロック89の遠端部は、カムの回転の量を制御する対応する指部113を有する。指部113が接触し、さらなる回転を防止するため、ロック89のシャフト82に対する回転は所定の範囲に制限される。一実施形態では、指部113が、回転を約90°に制限するように配置されている。その全体において参照により本明細書に組み込まれる、以前に提出された米国特許出願第10/178,960号が、いくつかの異なるタイプの移送デバイスおよびスペーサを制御するための構造を開示している。
【0043】
図24および25は、スペーサ10を移送デバイス80から外すための取外しデバイスの別の実施形態を示している。移送デバイス80は、遠端部にチューブスリーブ150を備える駆動スリーブ149を備える。所定の幅を有する解放スリーブ153が、チューブスリーブ150上に滑動可能に配置されている。プッシュロッド184が、チューブスリーブ150内に延びており、スペーサ10を展開させる遠端部185を備える。延長部151が、チューブスリーブ150の遠端部に向かって配置され、ホルダ155の開口157、およびスペーサ10内の開口37内に装着されている。スペーサ10は、移送デバイス80と接続されると、延長部151の周りに枢動する。リンク154が、ホルダ155と駆動スリーブ149との間に延びている。駆動スリーブ149のチューブスリーブ150に対する相対運動がスペーサを枢動させる。
【0044】
図26に示すように、チューブスリーブ150は、1つまたは複数の傾斜表面152を有する遠端部を備える。傾斜表面152は、延長部151に隣接する点で最大の高さまでチューブスリーブ150に沿って徐々に高さが増加する。スロット159が、傾斜表面152の間のチューブスリーブ150の遠端部上に形成されている。スロット159は、延長部151がスペーサ10に装着されているとき、幅wを有する。
【0045】
解放スリーブ153は、チューブスリーブ150上に滑動自在に装着されている。解放スリーブ153は、傾斜表面152から離れたチューブスリーブ150の第1のセクション158の幅よりも大きいが、傾斜表面152の幅よりも小さい所定の幅を有する。
【0046】
図27および28は、移送デバイス80のスペーサ10からの取外しを示している。図27では、スペーサ10は、延長部151がホルダ155およびスペーサ10を通って配置されるとき、移送デバイス80に接続される。解放スリーブ153は、チューブスリーブ152の第1のセクション158上に延長部から離れて配置される。図28は、移送デバイス80から取り外されつつあるスペーサ10を示している。解放スリーブ153が、チューブスリーブ150の傾斜表面152に沿って矢印xの方向に遠位に移動される。これにより、傾斜表面152を内向きに押しやり、したがって幅wを減少させる。同様にチューブスリーブ150の遠端部に装着された延長部151が、内側に押しやられ、スペーサ10から取り外される。この点で、スペーサ10が移送デバイス80から除去できる。ホルダ155は、移送デバイス80に取り付けられたままであり、患者体内にスペーサ10のみを残して取り外される。
【0047】
一実施形態では、プッシュロッド184が、チューブスリーブ150内のスロット159を通って延びており、スペーサ10が取り外されるのを防止する。プッシュロッド184がスロット159内にある間、傾斜表面152は、互いに押し付けられるのを防止され、したがって延長部151がスペーサ10内に留まる。いったんプッシュロッド184が取り外されると(すなわち「−X」方向に移動されると)、傾斜表面152が互いに押し付けられることができ、幅wがスペーサ10から延長部151を取り外すために減少される。別の実施形態では、開口159の幅wが減少されてスペーサが取り外し可能となるように、プッシュロッド184と傾斜表面との間に十分な隙間がある。一実施形態では、外科医が離れた位置からスペーサ10を解放することを可能にするために、アタッチメントが、解放スリーブ153から移送デバイス80の近端部に向かって延びてもよい。
【0048】
別の実施形態では、移送デバイス80が、いったんスペーサ10が展開されると壊れるように設計されたせん断可能なピンを介してスペーサ10に取り付けられてもよい。いったんピンがせん断されると、移送デバイス80がスペーサ10から取り外される。別の実施形態では、移送デバイス80がねじによってスペーサ10に取り付けられている。移送デバイス80のスペーサ10に対する回転が、スペーサをデバイス80から外させる。別の実施形態では、移送デバイス80およびスペーサ10が、移送デバイス80のスペーサ10に対する回転が取外しを生じさせるような半回転ロッキングシステムを備える。
【0049】
移送デバイス80は、使用中スペーサ10に取り付けられたままであっても、スペーサから取り外されてもよい。移送デバイス80の除去は、移送デバイス80が他の機器の邪魔になり、またはスペーサ10に取り付けられたまま残されている場合視界の邪魔になるため、処置中に外科医のための追加の作業空間を設けることを必要とする。この使用法ではさらに、移送デバイス80が、処置の終わりで、患者からの除去のためにスペーサ10に再び取り付けられてもよい。別の使用法では、移送デバイス80が取り外され、スペーサ10が患者体内に恒久的に留まる。
【0050】
一実施形態では、カム84がシャフト82を通って延び、ロック機構89に装着された近端部を備える。一実施形態では、カム84はロックに接続されていない。一実施形態では、カム84はシャフト82内で軸方向に移動可能であり且つ回転可能である。一実施形態では、第2のシャフト82が第1のシャフト81内に装着されている。一実施形態では、第1のシャフト81が、第2のシャフト82の外部に沿って滑動するようなサイズにされている。一実施形態では、第2のシャフト82が、関節動作および展開プロセス中、軸方向に静止している。一実施形態では、部材200が、関節動作プロセス中、静止している。
【0051】
椎骨部材という用語は、椎体、椎弓根、椎弓板および棘突起を含む椎骨幾何形状を記載するために全体的に使用されている。スペーサ10は、頚部、胸部、および腰部領域を含む椎骨の異なる領域内で使用されるような、サイズおよび形状に形成され且つ十分な強度要件を有するように形成してもよい。一実施形態では、スペーサ10は、約8806N(約2000ポンド重)の耐荷重を有する。
【0052】
スペーサは、隣接する椎骨の間の椎間空間内に配置されてもよい。接触表面21、31が、必要に応じて椎骨の間隔を空けるために椎骨の終板に接触する。スペーサ10は、患者体内に後方から、前方から、または側方から挿入できる。
【0053】
接触表面21、31は、スペーサ10内への骨の成長を可能にするために穴があけられていてもよい。接触表面21、31の一方または両方が、1つまたは複数の開口を備えてもよい。骨成長材料が、インプラント全体を通しての骨の成長に対処するために開口内に配置されてもよい。骨成長材料は、骨形成蛋白質(BMP)、LIM無機蛋白質(LMP)を含浸された、スポンジ、基質、および/またはその他のキャリアであってもよい。
【0054】
一実施形態では、スペーサ10が1対のレバーを使用して展開される。一実施形態では、スペーサは、はさみと同様の1対の偏移アームを有する機器によって展開される。
本発明は、本発明の範囲および本質的な特徴から逸脱することなく、ここに説明した以外の他の特定の方式で実行されてもよい。一実施形態では、スペーサ10および移送デバイス80がステンレス鋼で製造されている。一実施形態では、支持セクションが、傾斜表面の遠位に配置されている。一実施形態では、カム184、84がプッシュロッドである。一実施形態では、偏倚部材108がコイルばねである。一実施形態では、スペーサ10が開放方向にあるとき、部材の傾斜表面が接触する。一実施形態では、第2の部材30が側壁33を備えず、第3の部材40が第2の部材30よりも小さい、またはそれと等しい幅を有する。一実施形態では、スペーサ10がチタニウムで製造されている。一実施形態では、スペーサ内の開口37が直径約3.5mmである。本実施形態は、したがって、すべての点で限定的ではなく、例示的であるとみなされるものであり、頭記の特許請求の範囲の意図するものおよび等価な範囲が、ここに包含されることが、意図されている。
【図面の簡単な説明】
【0055】
【図1】本発明の一実施形態の透視図である。
【図2】本発明の一実施形態による閉鎖方向にあるスペーサの透視図である。
【図3】本発明の一実施形態による開放方向にあるスペーサの透視図である。
【図4】本発明の一実施形態によるスペーサの分解透視図である。
【図5】本発明の一実施形態による第1の部材の透視図である。
【図6】本発明の一実施形態による第2の部材内の第1の位置にある第3の部材の透視図である。
【図7】本発明の一実施形態による第2の部材内の第2の位置にある第3の部材の透視図である。
【図8】本発明の一実施形態によるロッキング機構の部分切断透視図である。
【図9】本発明の一実施形態による第2の部材と接触する第1の部材の透視図である。
【図10】本発明の一実施形態による移送デバイスに対して傾斜されたスペーサの部分透視図である。
【図11】本発明の一実施形態による移送デバイスに対して傾斜されたスペーサの別の実施形態の部分透視図である。
【図12】本発明の一実施形態による移送デバイスから分離されたスペーサの部分透視図である。
【図13】本発明の一実施形態による第1の方向にあるホルダおよび枢軸の部分透視図である。
【図14】本発明の一実施形態による第2の方向にあるホルダおよび枢軸の部分透視図である。
【図15】本発明の一実施形態による移送デバイスに対して傾斜されたスペーサの別の実施形態の部分透視図である。
【図16】本発明の一実施形態による本発明の透視図である。
【図17】本発明の一実施形態によるデバイスのセクションの部分透視図である。
【図18】本発明の一実施形態による第2の部材内の第1の位置にある第3の部材の部分透視図である。
【図19】本発明の一実施形態による第2の部材内の第2の位置にある第3の部材の部分透視図である。
【図20】本発明の一実施形態によるロックの部分透視図である。
【図21】本発明の一実施形態によるライブピボットの部分透視図である。
【図22】本発明の一実施形態に従って製造された第3の部材の別の実施形態の透視図である。
【図23】本発明の一実施形態に従って製造された第3の部材と接触するカムの部分透視図である。
【図24】本発明の一実施形態に従って製造された別の移送デバイスおよび解放機構の部分透視図である。
【図25】本発明の一実施形態に従って製造された移送デバイスに取り付けられスペーサの部分透視図である。
【図26】本発明の一実施形態に従って製造されたチューブスリーブおよびカムの部分透視図である。
【図27】本発明の一実施形態に従って製造された移送デバイスに取り付けられたスペーサの部分透視図である。
【図28】本発明の一実施形態に従って製造された移送デバイスから脱着されたスペーサの部分透視図である。
【特許請求の範囲】
【請求項1】
椎骨部材を離隔させるためのデバイスであって、
第1の傾斜セクションを備える内側面と、第1の接触表面を備える外側面とを有する第1の部材と、
第2の内側面および第2の外部接触表面を有する第2の部材と、
前記第1の部材と前記第2の部材との間に配置され、前記第1の傾斜セクションに向かって配置された第2の傾斜セクションを備える第1の側面と、前記第2の部材の内部表面に向かって配置された第2の側面とを有する第3の部材と、を備え、
前記デバイスが、前記第1の傾斜セクションが前記第2の傾斜セクションから分離され且つ前記第1の接触表面と前記第2の接触表面との間に延びる第1の高さを有する第1の方向と、前記第1の傾斜セクションが前記第2の傾斜セクションと係合し且つ前記第1の高さよりも大きい前記第1の接触表面と前記第2の接触表面の間の第2の高さを有する第2の方向との間で配置可能である、椎骨部材を離隔させるためのデバイス。
【請求項2】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第3の部材の周囲に部分的に延びるように、前記第1の接触表面から外向きに延びる側壁を有する、デバイス。
【請求項3】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1の接触表面および前記第2の外部接触表面が、前記第1の方向とほぼ平行である、デバイス。
【請求項4】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1の接触表面および前記第2の外部接触表面が、前記第2の方向に鋭角を形成している、デバイス。
【請求項5】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1の部材、第2の部材および第3の部材が、湾曲した形状を有する、デバイス。
【請求項6】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第2の部材の第2の内側面および前記第3の部材の第2の側面の両方が、ほぼ平坦である、デバイス。
【請求項7】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第3の部材から外向きに延び、前記デバイスが前記第2の方向に配置されているとき、前記第2の部材の開口内に装着される少なくとも1つの延長部を有するロッキング機構をさらに備える、デバイス。
【請求項8】
請求項7に記載の椎骨部材を離隔させるためのデバイスであって、
前記ロッキング機構が、前記デバイスが前記第2の方向にあるとき、キャップを前記開口内へ外向きに押し付ける偏倚部材をさらに備える、デバイス。
【請求項9】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1の部材が、前記第1の傾斜セクションに隣接する第1のプラットホームをさらに備え、前記第3の部材が、前記第2の傾斜セクションに隣接する第2のプラットホームをさらに備え、前記デバイスが前記第2の方向に配置されたとき、前記第1のプラットホームおよび第2のプラットホームが接触する、デバイス。
【請求項10】
請求項9に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1のプラットホームが前記第1の接触表面とほぼ平行であり、前記第2のプラットホームが前記第2の外部接触表面とほぼ平行である、デバイス。
【請求項11】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1の部材および前記第3の部材の両方に追加の傾斜セクションをさらに備え、前記追加の傾斜セクションが、前記第1の方向で分離され、前記第2の方向で係合される、デバイス。
【請求項12】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第2の部材と枢動自在に接続された細長い移送デバイスをさらに備え、前記第2の部材が、前記移送デバイスに対する角度を調節するために前記移送デバイスに対して移動可能である、デバイス。
【請求項13】
請求項12に記載の椎骨部材を離隔させるためのデバイスであって、
前記第2の部材の前記移送デバイスに対する角度が約10°から約110°の範囲である、デバイス。
【請求項14】
請求項12に記載の椎骨部材を離隔させるためのデバイスであって、
前記移送デバイスを前記第2の部材から取り外すための分離手段をさらに備える、デバイス。
【請求項15】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記移送デバイスの遠端部に装着されるライブピボットをさらに備え、前記ライブピボットが、前記部材の1つを装着するために前記ライブピボットが前記移送デバイスから外向きに延びる第1の位置と、前記移送デバイスから前記部材の1つを取り外すために前記ライブピボットが引き込まれる第2の位置との間で可動である、デバイス。
【請求項16】
請求項12に記載の椎骨部材を離隔させるためのデバイスであって、
前記移送デバイスに対する前記第2の部材の角度を調節するための調節手段をさらに備える、デバイス。
【請求項17】
請求項12に記載の椎骨部材を離隔させるためのデバイスであって、
前記移送デバイスと動作可能に接続された展開器をさらに備え、前記展開器が、前記第1の方向と前記第2の方向との間で前記デバイスの位置を調節するために、前記第3の部材を前記第1の部材に対して移動させる、デバイス。
【請求項18】
請求項17に記載の椎骨部材を離隔させるためのデバイスであって、
前記展開器が、前記移送デバイスに沿って延び、前記第3の部材と接触して前記第3の部材を前記第1の部材に対して移動させる遠端部を有するカムを備える、デバイス。
【請求項19】
請求項17に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1の部材に対する前記第3の部材の位置を維持するためのロック部をさらに備える、デバイス。
【請求項20】
椎骨部材を離隔させるためのデバイスであって、
第1の側面、および第1の外部接触側面に対して傾斜された受け表面を備える第2の側面を有する第1の部材と、
第2の外部接触側面、及び前記第2の外部接触側面に対して傾斜された展開表面を備える第2の内部側面を有する第2の部材と、を備え、
前記第2の部材が、前記展開表面が前記受け表面から分離する第1の位置と、前記展開表面が前記受け表面と係合する第2の位置との間で前記第1の部材に対して移動可能であり、前記第1の位置のときよりも前記第2の位置のときのほうが前記第1の外部接触表面と前記第2の外部接触表面の間で測定される高さが大きい、椎骨部材を離隔させるためのデバイス。
【請求項21】
請求項20に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1の位置において前記第2の部材が前記第1の部材の近端部に向かって配置され、前記第2の位置において前記第2の部材が前記第1の部材の遠端部に向かって配置される、デバイス。
【請求項22】
請求項20に記載の椎骨部材を離隔させるためのデバイスであって、
前記受け表面に隣接して配置された第1のプラットホームと、前記展開表面に隣接して配置された第2のプラットホームとを備え、前記第1のプラットホームが、前記第1の位置で前記第2のプラットホームから離隔され、前記第2の位置で前記第2のプラットホームと接触する、デバイス。
【請求項23】
請求項22に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1のプラットホームが前記第1の側面とほぼ平行であり、前記第2のプラットホームが前記第2の外部接触側面とほぼ平行である、デバイス。
【請求項24】
請求項20に記載の椎骨部材を離隔させるためのデバイスであって、
前記第2の部材と動作可能に接続された展開機構をさらに備え、前記展開機構が、前記第2の部材を前記第1の部材に対して移動させる、デバイス。
【請求項25】
椎骨部材を離隔させるためのデバイスであって、
対向する第1および第2の側面を有し、前記第1の側面が第1および第2の受け斜面を有する第1の部材と、
前記第1の部材と隣接して配置され、対向する第3および第4の側面を有し、前記第3の側面が、第1および第2の展開斜面を有し、前記第1および第2の受け斜面に面している第2の部材と、を備え、
前記第2の部材が、前記第1および第2の展開斜面が前記第1および第2の受け斜面から離れて配置された第1の方向と、前記第1および第2の展開斜面が前記第1および第2の受け斜面に接して配置された第2の方向との間で、前記第1の部材の対して移動可能であり、前記第1の方向のときよりも前記第2の方向のときのほうが前記第1の部材の第2の側面と前記第2の部材の第4の側面の間の距離が大きい、椎骨部材を離隔させるためのデバイス。
【請求項26】
請求項25に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1および第2の部材がそれぞれ、前記第1の方向において整列され、前記第2の方向において偏移される近端部を備える、デバイス。
【請求項27】
請求項25に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1および第2の受け斜面が、前記第2の側面に対して等しい量だけ傾斜されている、デバイス。
【請求項28】
請求項25に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1および第2の受け斜面が、前記第2の側面に対して異なる量だけ傾斜されている、デバイス。
【請求項29】
請求項25に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1および第2の展開斜面が、前記第4の側面に対して等しい量だけ傾斜されている、デバイス。
【請求項30】
請求項25に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1および第2の展開斜面が、前記第4の側面に対して異なる量だけ傾斜されている、デバイス。
【請求項31】
請求項25に記載の椎骨部材を離隔させるためのデバイスであって、
前記第2の部材と隣接し且つ前記第1の部材から離れて配置された第3の部材をさらに備え、前記第3の部材が側壁を備える第5の側面を有し、前記側壁が、前記第5の側面を前記第2の部材の前記第4の側面と接触させた状態で前記第2の部材が配置される受け位置を画定する、デバイス。
【請求項32】
椎骨部材の離隔させるためのデバイスであって、
外部側面および内部側面をそれぞれ有し、前記内部側面が、前記外部側面に対してある角度で配置された傾斜表面を有する、第1の部材および第2の部材と、
前記デバイスを椎骨部材の間に配置するために、細長い形状を有する、前記第1および第2の部材の少なくとも一方と接続された移送デバイスと、
前記傾斜表面が分離される第1の位置と前記傾斜表面が係合される第2の位置との間で、前記第2の部材に対する動きを前記第1の部材に与えるために前記第1および第2の部材の一方と動作可能に接続され、前記第1の位置のときよりも前記第2の位置のときのほうが前記外部側面の間で測定される高さが大きい、展開器と、
を備える、椎骨部材の離隔させるためのデバイス。
【請求項33】
請求項32に記載の椎骨部材を離隔させるためのデバイスであって、
前記移送デバイスが、前記第1および第2の部材の前記移送デバイスに対する角度を調節するために前記第1および第2の部材の少なくとも一方と枢動自在に取り付けられている、デバイス。
【請求項34】
請求項33に記載の椎骨部材を離隔させるためのデバイスであって、
前記移送デバイスが、前記第1および第2の部材の少なくとも一方と接続するために前記移送デバイスから外向きに延びる接続位置と、前記第1および第2の部材を前記移送デバイスから取り外すために前記移送デバイス内に引っ込む非接続位置との間で可動であるライブピボットをさらに備える、デバイス。
【請求項35】
請求項32に記載の椎骨部材を離隔させるためのデバイスであって、
前記移送デバイスが、スペーサに取り付けられた遠端部に装着された延長部を備える第2のセクションから所定の距離離隔された第1のセクションを有する可撓性のスリーブをさらに備える、デバイス。
【請求項36】
請求項35に記載の椎骨部材を離隔させるためのデバイスであって、
前記所定の距離よりも小さい幅を有する解放可能なスリーブを更に備え、前記解放可能なスリーブが前記可撓性のスリーブ上に配置されているときに、前記第1のセクションが前記スペーサから前記延長部を分離するために前記所定の距離よりも小さい量だけ離隔される、デバイス。
【請求項37】
椎骨部材を離隔させるためのデバイスであって、
第1の斜面を備える第1のセクションおよび第2の斜面を備える第2のセクションを有し、閉鎖位置と開放位置との間に配置されているスペーサと、
前記第1のセクションに取り付けられた第1のシャフトと前記第2のセクションに動作可能に取り付けられた第2のシャフトとを有する、前記スペーサに装着された細長い移送デバイスであって、遠端部が前記第2の斜面と接触して、前記第1の斜面が前記第2の斜面から分離する閉鎖位置から前記第1の斜面が前記第2の斜面と接触する開放位置へ前記第2の斜面を移動させるように、前記第2のシャフトが前記第1のシャフトに対して可動である、細長い移送デバイスと、
を備え、前記スペーサが、閉鎖位置のときよりも開放位置のときのほうが大きい幅を有する、椎骨部材を離隔させるためのデバイス。
【請求項38】
請求項37に記載の椎骨部材を離隔させるためのデバイスであって、
前記第2のシャフトが、前記第1のシャフト内に配置されている、デバイス。
【請求項39】
請求項37に記載の椎骨部材を離隔させるためのデバイスであって、
前記第2の斜面が、前記第2のシャフトの遠端部によって接触される接触表面を有する突起をさらに備える、デバイス。
【請求項40】
請求項37に記載のデバイスであって、
前記第1のシャフトが、前記第1の斜面の開口内に装着された、外向きに延びる延長部を備える、デバイス。
【請求項41】
請求項37に記載の椎骨部材を離隔させるためのデバイスであって、
前記スペーサを前記移送デバイスから取り外すために開口から延長部を取り外すための取外し手段をさらに備えるデバイス。
【請求項42】
椎骨部材を離隔させるためのデバイスであって、
第1の斜面を備える第1のセクションおよび第2の斜面を備える第2のセクションを有し、前記第1の斜面が前記第2の斜面から分離する閉鎖方向と前記第1の斜面が前記第2の斜面と接触する開放方向との間で配置されており、その幅が前記閉鎖方向のときよりも前記開放方向のときのほうが大きく、且つ、開口を更に有するスペーサと、
前記移送デバイスから外向きに延び且つ前記開口内に装着される第1の形態と、内向きに引き込まれて前記開口から取り外される第2の形態との間で配置可能な延長部を有する、前記スペーサに取り付けられた細長い移送デバイスと、
を備える、椎骨部材を離隔させるためのデバイス。
【請求項43】
請求項42に記載の椎骨部材を離隔させるためのデバイスであって、
前記移送デバイスが、前記第1の形態で第1の距離だけ離れて離隔される1対の外向きに向いた傾斜表面と、前記移送デバイス上に可動に配置され、前記第1の距離よりも小さい高さを有する解放スリーブとを備える、デバイス。
【請求項44】
請求項43に記載の椎骨部材を離隔させるためのデバイスであって、
前記延長部が、前記移送デバイスの前記遠端部と前記傾斜表面との間に配置されている、デバイス。
【請求項45】
請求項44に記載の椎骨部材を離隔させるためのデバイスであって、
前記傾斜表面の間に配置され、前記移送デバイスに沿って軸方向に可動であるプッシュロッドをさらに備える、デバイス。
【請求項46】
椎骨部材を離隔させるためのデバイスであって、
外側動作側面と前記外側動作側面に対して傾斜された動作斜面を有する内側動作側面とを有する動作部材と、
内側支持側面と第2の外側側面とを有する第2の部材と、
前記動作部材と第2の部材との間に配置される展開部材であって、該展開部材が、前記動作部材に面した第1の展開側面と、前記第2の部材の前記内側支持側面と接触する接触側面とを有し、前記第1の展開側面が前記接触側面に対して傾斜した展開斜面を有するように構成される展開部材と、
前記展開部材の前記移送デバイスに対する角度位置を調節するために前記展開部材と枢動自在に接続された第1の端部を備える細長い形状を有する移送デバイスと、
前記移送デバイスに沿って軸方向に可動であり、前記展開部材と動作可能に接続されるシャフトであって、前記展開斜面が前記動作斜面から分離している前記展開部材を配置するための第1の方向と、前記展開斜面が前記動作斜面と係合している第2の方向との間で可動であるシャフトと、
を備える、椎骨部材を離隔させるためのデバイス。
【請求項47】
椎骨部材を離隔させるための方法であって、
前記椎骨部材の間に、第1の方向にあり、第1の高さで隔てられた対向する外部側面を有するスペーサを配置するステップと、
前記スペーサ内の第1の傾斜表面を前記スペーサ内の第2の傾斜表面に対して第2の方向へ移動させ、前記対向する外部側面を前記第1の高さよりも大きい第2の高さに離隔するステップと、
を含む、椎骨部材を離隔させるための方法。
【請求項48】
請求項47に記載の椎骨部材を離隔させるための方法であって、
第2の方向において第1のプラットホーム表面を第2のプラットホーム表面と接触させるステップをさらに含む、方法。
【請求項49】
請求項47に記載の椎骨部材を離隔させるための方法であって、
前記第1の傾斜表面を第1の方向の前記スペーサの近端部から第2の方向のスペーサの遠端部へ移動させるステップをさらに含む、方法。
【請求項50】
請求項47に記載の椎骨部材を離隔させるための方法であって、
解放スリーブを前記移送デバイスに沿って移動させ、対向する傾斜表面を内向きに押して延長部を内向きに引き込んで前記スペーサから取り外すことによって、前記スペーサから前記移送デバイスを取り外すステップをさらに含む、方法。
【請求項51】
請求項47に記載の椎骨部材を離隔させるための方法であって、
前記第1の傾斜表面を前記スペーサ内で前記第2の傾斜表面に対して移動させるステップが、前記第1の傾斜表面または前記第2の傾斜表面の一方をカムで押すステップをさらに含む、方法。
【請求項52】
請求項47に記載の椎骨部材を離隔させるための方法であって、
前記移送デバイス内でカムを回転させ、ライブピボットを内向きに引き込むことによって移送デバイスを前記スペーサから分離させるステップをさらに含む、方法。
【請求項53】
椎骨部材を離隔させるための方法であって、
第1の方向で第1の部材の第1の傾斜表面が第2の部材の第2の傾斜表面から分離している間に前記椎骨部材の間にスペーサを配置するステップと、
前記第1の部材に押圧力を加えるステップと、
前記第1の部材を近位の位置から遠位の位置へ向かって移動させ、前記第1の傾斜表面を前記第2の傾斜表面と係合させるステップと、
前記スペーサの外部側面を、前記第1の方向の第1の距離から、前記第1の傾斜表面が前記第2の傾斜表面と係合するときのより大きな第2の距離まで離隔させるステップと、
を含む、椎骨部材を離隔させるための方法。
【請求項54】
請求項53に記載の椎骨部材を離隔させるための方法であって、
前記第1の部材へ押圧力を加えるステップが、前記第1の部材を、移送デバイスに沿って延びるカムと接触させるステップを含む、方法。
【請求項55】
椎骨部材を離隔させるための方法であって、
第3の部材が第1の部材と第2の部材の間に配置された閉鎖方向で前記椎骨部材の間に前記スペーサを配置するステップと、
前記第3の部材を近位の位置から遠位の位置へ押すステップと、
前記第3の部材が前記近位の位置から前記遠位の位置に向かって移動するとき、前記第1の部材上の第1の傾斜表面を前記第3の部材上の第2の傾斜表面と係合させるステップと、
前記スペーサの幅を広げるステップと、
を含む、椎骨部材を離隔させるための方法。
【請求項56】
請求項54に記載の椎骨部材を離隔させるための方法であって、
前記第3の部材を前記遠位の位置に向かって移動させることによって前記スペーサの幅を増加させるステップをさらに含む、方法。
【請求項57】
椎骨部材を離隔させるための方法であって、
スペーサを移送デバイスに取り付けるステップと、
前記移送デバイスを操作し、前記スペーサを前記椎骨部材の間に配置するステップと、
前記プッシュロッドの遠端部が前記スペーサの第1の部材と接触する状態で前記移送デバイスを通じてプッシュロッドを展開させるステップと、
前記スペーサの前記第1の部材を近位の位置から遠位の位置に向かって移動させるステップと、
前記第1の部材が前記近位の位置から前記遠位の位置に向かって移動するとき、前記第1の部材上の第1の傾斜表面を前記スペーサの第2の部材上の第2の傾斜表面と係合させ、前記スペーサの幅を増加させるステップと、
を含む、椎骨部材を離隔させるための方法。
【請求項58】
請求項57に記載の椎骨部材を離隔させるための方法であって、
前記スペーサを前記移送デバイスに取り付けるステップが、前記移送デバイス上のピボットを前記スペーサ内の開口に取り付けるステップを含む、方法。
【請求項59】
請求項58に記載の椎骨部材を離隔させるための方法であって、
前記プッシュロッドの小さいセクションが前記ピボットと整列され、前記ピボットが前記開口内に引っ込むようにして、前記移送デバイス内の前記プッシュロッドを回転させることによって、前記ピボットを前記開口から分離させるステップをさらに含む、方法。
【請求項60】
請求項57に記載の椎骨部材を離隔させるための方法であって、
スペーサを前記移送デバイスに取り付けるステップが、第1のチューブの遠位の端部上の延長部を前記スペーサ内の開口に取り付けるステップをさらに含む、方法。
【請求項61】
請求項60に記載の椎骨部材を離隔させるための方法であって、
前記延長部を前記開口から分離させるステップを更に含み、
前記延長部を前記開口から分離させるステップが、解放スリーブを前記第1のチューブに沿って移動させ、第1および第2のアームを互いに圧迫し、前記延長部の間の距離を減少させるステップを含む、方法。
【請求項1】
椎骨部材を離隔させるためのデバイスであって、
第1の傾斜セクションを備える内側面と、第1の接触表面を備える外側面とを有する第1の部材と、
第2の内側面および第2の外部接触表面を有する第2の部材と、
前記第1の部材と前記第2の部材との間に配置され、前記第1の傾斜セクションに向かって配置された第2の傾斜セクションを備える第1の側面と、前記第2の部材の内部表面に向かって配置された第2の側面とを有する第3の部材と、を備え、
前記デバイスが、前記第1の傾斜セクションが前記第2の傾斜セクションから分離され且つ前記第1の接触表面と前記第2の接触表面との間に延びる第1の高さを有する第1の方向と、前記第1の傾斜セクションが前記第2の傾斜セクションと係合し且つ前記第1の高さよりも大きい前記第1の接触表面と前記第2の接触表面の間の第2の高さを有する第2の方向との間で配置可能である、椎骨部材を離隔させるためのデバイス。
【請求項2】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第3の部材の周囲に部分的に延びるように、前記第1の接触表面から外向きに延びる側壁を有する、デバイス。
【請求項3】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1の接触表面および前記第2の外部接触表面が、前記第1の方向とほぼ平行である、デバイス。
【請求項4】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1の接触表面および前記第2の外部接触表面が、前記第2の方向に鋭角を形成している、デバイス。
【請求項5】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1の部材、第2の部材および第3の部材が、湾曲した形状を有する、デバイス。
【請求項6】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第2の部材の第2の内側面および前記第3の部材の第2の側面の両方が、ほぼ平坦である、デバイス。
【請求項7】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第3の部材から外向きに延び、前記デバイスが前記第2の方向に配置されているとき、前記第2の部材の開口内に装着される少なくとも1つの延長部を有するロッキング機構をさらに備える、デバイス。
【請求項8】
請求項7に記載の椎骨部材を離隔させるためのデバイスであって、
前記ロッキング機構が、前記デバイスが前記第2の方向にあるとき、キャップを前記開口内へ外向きに押し付ける偏倚部材をさらに備える、デバイス。
【請求項9】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1の部材が、前記第1の傾斜セクションに隣接する第1のプラットホームをさらに備え、前記第3の部材が、前記第2の傾斜セクションに隣接する第2のプラットホームをさらに備え、前記デバイスが前記第2の方向に配置されたとき、前記第1のプラットホームおよび第2のプラットホームが接触する、デバイス。
【請求項10】
請求項9に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1のプラットホームが前記第1の接触表面とほぼ平行であり、前記第2のプラットホームが前記第2の外部接触表面とほぼ平行である、デバイス。
【請求項11】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1の部材および前記第3の部材の両方に追加の傾斜セクションをさらに備え、前記追加の傾斜セクションが、前記第1の方向で分離され、前記第2の方向で係合される、デバイス。
【請求項12】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記第2の部材と枢動自在に接続された細長い移送デバイスをさらに備え、前記第2の部材が、前記移送デバイスに対する角度を調節するために前記移送デバイスに対して移動可能である、デバイス。
【請求項13】
請求項12に記載の椎骨部材を離隔させるためのデバイスであって、
前記第2の部材の前記移送デバイスに対する角度が約10°から約110°の範囲である、デバイス。
【請求項14】
請求項12に記載の椎骨部材を離隔させるためのデバイスであって、
前記移送デバイスを前記第2の部材から取り外すための分離手段をさらに備える、デバイス。
【請求項15】
請求項1に記載の椎骨部材を離隔させるためのデバイスであって、
前記移送デバイスの遠端部に装着されるライブピボットをさらに備え、前記ライブピボットが、前記部材の1つを装着するために前記ライブピボットが前記移送デバイスから外向きに延びる第1の位置と、前記移送デバイスから前記部材の1つを取り外すために前記ライブピボットが引き込まれる第2の位置との間で可動である、デバイス。
【請求項16】
請求項12に記載の椎骨部材を離隔させるためのデバイスであって、
前記移送デバイスに対する前記第2の部材の角度を調節するための調節手段をさらに備える、デバイス。
【請求項17】
請求項12に記載の椎骨部材を離隔させるためのデバイスであって、
前記移送デバイスと動作可能に接続された展開器をさらに備え、前記展開器が、前記第1の方向と前記第2の方向との間で前記デバイスの位置を調節するために、前記第3の部材を前記第1の部材に対して移動させる、デバイス。
【請求項18】
請求項17に記載の椎骨部材を離隔させるためのデバイスであって、
前記展開器が、前記移送デバイスに沿って延び、前記第3の部材と接触して前記第3の部材を前記第1の部材に対して移動させる遠端部を有するカムを備える、デバイス。
【請求項19】
請求項17に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1の部材に対する前記第3の部材の位置を維持するためのロック部をさらに備える、デバイス。
【請求項20】
椎骨部材を離隔させるためのデバイスであって、
第1の側面、および第1の外部接触側面に対して傾斜された受け表面を備える第2の側面を有する第1の部材と、
第2の外部接触側面、及び前記第2の外部接触側面に対して傾斜された展開表面を備える第2の内部側面を有する第2の部材と、を備え、
前記第2の部材が、前記展開表面が前記受け表面から分離する第1の位置と、前記展開表面が前記受け表面と係合する第2の位置との間で前記第1の部材に対して移動可能であり、前記第1の位置のときよりも前記第2の位置のときのほうが前記第1の外部接触表面と前記第2の外部接触表面の間で測定される高さが大きい、椎骨部材を離隔させるためのデバイス。
【請求項21】
請求項20に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1の位置において前記第2の部材が前記第1の部材の近端部に向かって配置され、前記第2の位置において前記第2の部材が前記第1の部材の遠端部に向かって配置される、デバイス。
【請求項22】
請求項20に記載の椎骨部材を離隔させるためのデバイスであって、
前記受け表面に隣接して配置された第1のプラットホームと、前記展開表面に隣接して配置された第2のプラットホームとを備え、前記第1のプラットホームが、前記第1の位置で前記第2のプラットホームから離隔され、前記第2の位置で前記第2のプラットホームと接触する、デバイス。
【請求項23】
請求項22に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1のプラットホームが前記第1の側面とほぼ平行であり、前記第2のプラットホームが前記第2の外部接触側面とほぼ平行である、デバイス。
【請求項24】
請求項20に記載の椎骨部材を離隔させるためのデバイスであって、
前記第2の部材と動作可能に接続された展開機構をさらに備え、前記展開機構が、前記第2の部材を前記第1の部材に対して移動させる、デバイス。
【請求項25】
椎骨部材を離隔させるためのデバイスであって、
対向する第1および第2の側面を有し、前記第1の側面が第1および第2の受け斜面を有する第1の部材と、
前記第1の部材と隣接して配置され、対向する第3および第4の側面を有し、前記第3の側面が、第1および第2の展開斜面を有し、前記第1および第2の受け斜面に面している第2の部材と、を備え、
前記第2の部材が、前記第1および第2の展開斜面が前記第1および第2の受け斜面から離れて配置された第1の方向と、前記第1および第2の展開斜面が前記第1および第2の受け斜面に接して配置された第2の方向との間で、前記第1の部材の対して移動可能であり、前記第1の方向のときよりも前記第2の方向のときのほうが前記第1の部材の第2の側面と前記第2の部材の第4の側面の間の距離が大きい、椎骨部材を離隔させるためのデバイス。
【請求項26】
請求項25に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1および第2の部材がそれぞれ、前記第1の方向において整列され、前記第2の方向において偏移される近端部を備える、デバイス。
【請求項27】
請求項25に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1および第2の受け斜面が、前記第2の側面に対して等しい量だけ傾斜されている、デバイス。
【請求項28】
請求項25に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1および第2の受け斜面が、前記第2の側面に対して異なる量だけ傾斜されている、デバイス。
【請求項29】
請求項25に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1および第2の展開斜面が、前記第4の側面に対して等しい量だけ傾斜されている、デバイス。
【請求項30】
請求項25に記載の椎骨部材を離隔させるためのデバイスであって、
前記第1および第2の展開斜面が、前記第4の側面に対して異なる量だけ傾斜されている、デバイス。
【請求項31】
請求項25に記載の椎骨部材を離隔させるためのデバイスであって、
前記第2の部材と隣接し且つ前記第1の部材から離れて配置された第3の部材をさらに備え、前記第3の部材が側壁を備える第5の側面を有し、前記側壁が、前記第5の側面を前記第2の部材の前記第4の側面と接触させた状態で前記第2の部材が配置される受け位置を画定する、デバイス。
【請求項32】
椎骨部材の離隔させるためのデバイスであって、
外部側面および内部側面をそれぞれ有し、前記内部側面が、前記外部側面に対してある角度で配置された傾斜表面を有する、第1の部材および第2の部材と、
前記デバイスを椎骨部材の間に配置するために、細長い形状を有する、前記第1および第2の部材の少なくとも一方と接続された移送デバイスと、
前記傾斜表面が分離される第1の位置と前記傾斜表面が係合される第2の位置との間で、前記第2の部材に対する動きを前記第1の部材に与えるために前記第1および第2の部材の一方と動作可能に接続され、前記第1の位置のときよりも前記第2の位置のときのほうが前記外部側面の間で測定される高さが大きい、展開器と、
を備える、椎骨部材の離隔させるためのデバイス。
【請求項33】
請求項32に記載の椎骨部材を離隔させるためのデバイスであって、
前記移送デバイスが、前記第1および第2の部材の前記移送デバイスに対する角度を調節するために前記第1および第2の部材の少なくとも一方と枢動自在に取り付けられている、デバイス。
【請求項34】
請求項33に記載の椎骨部材を離隔させるためのデバイスであって、
前記移送デバイスが、前記第1および第2の部材の少なくとも一方と接続するために前記移送デバイスから外向きに延びる接続位置と、前記第1および第2の部材を前記移送デバイスから取り外すために前記移送デバイス内に引っ込む非接続位置との間で可動であるライブピボットをさらに備える、デバイス。
【請求項35】
請求項32に記載の椎骨部材を離隔させるためのデバイスであって、
前記移送デバイスが、スペーサに取り付けられた遠端部に装着された延長部を備える第2のセクションから所定の距離離隔された第1のセクションを有する可撓性のスリーブをさらに備える、デバイス。
【請求項36】
請求項35に記載の椎骨部材を離隔させるためのデバイスであって、
前記所定の距離よりも小さい幅を有する解放可能なスリーブを更に備え、前記解放可能なスリーブが前記可撓性のスリーブ上に配置されているときに、前記第1のセクションが前記スペーサから前記延長部を分離するために前記所定の距離よりも小さい量だけ離隔される、デバイス。
【請求項37】
椎骨部材を離隔させるためのデバイスであって、
第1の斜面を備える第1のセクションおよび第2の斜面を備える第2のセクションを有し、閉鎖位置と開放位置との間に配置されているスペーサと、
前記第1のセクションに取り付けられた第1のシャフトと前記第2のセクションに動作可能に取り付けられた第2のシャフトとを有する、前記スペーサに装着された細長い移送デバイスであって、遠端部が前記第2の斜面と接触して、前記第1の斜面が前記第2の斜面から分離する閉鎖位置から前記第1の斜面が前記第2の斜面と接触する開放位置へ前記第2の斜面を移動させるように、前記第2のシャフトが前記第1のシャフトに対して可動である、細長い移送デバイスと、
を備え、前記スペーサが、閉鎖位置のときよりも開放位置のときのほうが大きい幅を有する、椎骨部材を離隔させるためのデバイス。
【請求項38】
請求項37に記載の椎骨部材を離隔させるためのデバイスであって、
前記第2のシャフトが、前記第1のシャフト内に配置されている、デバイス。
【請求項39】
請求項37に記載の椎骨部材を離隔させるためのデバイスであって、
前記第2の斜面が、前記第2のシャフトの遠端部によって接触される接触表面を有する突起をさらに備える、デバイス。
【請求項40】
請求項37に記載のデバイスであって、
前記第1のシャフトが、前記第1の斜面の開口内に装着された、外向きに延びる延長部を備える、デバイス。
【請求項41】
請求項37に記載の椎骨部材を離隔させるためのデバイスであって、
前記スペーサを前記移送デバイスから取り外すために開口から延長部を取り外すための取外し手段をさらに備えるデバイス。
【請求項42】
椎骨部材を離隔させるためのデバイスであって、
第1の斜面を備える第1のセクションおよび第2の斜面を備える第2のセクションを有し、前記第1の斜面が前記第2の斜面から分離する閉鎖方向と前記第1の斜面が前記第2の斜面と接触する開放方向との間で配置されており、その幅が前記閉鎖方向のときよりも前記開放方向のときのほうが大きく、且つ、開口を更に有するスペーサと、
前記移送デバイスから外向きに延び且つ前記開口内に装着される第1の形態と、内向きに引き込まれて前記開口から取り外される第2の形態との間で配置可能な延長部を有する、前記スペーサに取り付けられた細長い移送デバイスと、
を備える、椎骨部材を離隔させるためのデバイス。
【請求項43】
請求項42に記載の椎骨部材を離隔させるためのデバイスであって、
前記移送デバイスが、前記第1の形態で第1の距離だけ離れて離隔される1対の外向きに向いた傾斜表面と、前記移送デバイス上に可動に配置され、前記第1の距離よりも小さい高さを有する解放スリーブとを備える、デバイス。
【請求項44】
請求項43に記載の椎骨部材を離隔させるためのデバイスであって、
前記延長部が、前記移送デバイスの前記遠端部と前記傾斜表面との間に配置されている、デバイス。
【請求項45】
請求項44に記載の椎骨部材を離隔させるためのデバイスであって、
前記傾斜表面の間に配置され、前記移送デバイスに沿って軸方向に可動であるプッシュロッドをさらに備える、デバイス。
【請求項46】
椎骨部材を離隔させるためのデバイスであって、
外側動作側面と前記外側動作側面に対して傾斜された動作斜面を有する内側動作側面とを有する動作部材と、
内側支持側面と第2の外側側面とを有する第2の部材と、
前記動作部材と第2の部材との間に配置される展開部材であって、該展開部材が、前記動作部材に面した第1の展開側面と、前記第2の部材の前記内側支持側面と接触する接触側面とを有し、前記第1の展開側面が前記接触側面に対して傾斜した展開斜面を有するように構成される展開部材と、
前記展開部材の前記移送デバイスに対する角度位置を調節するために前記展開部材と枢動自在に接続された第1の端部を備える細長い形状を有する移送デバイスと、
前記移送デバイスに沿って軸方向に可動であり、前記展開部材と動作可能に接続されるシャフトであって、前記展開斜面が前記動作斜面から分離している前記展開部材を配置するための第1の方向と、前記展開斜面が前記動作斜面と係合している第2の方向との間で可動であるシャフトと、
を備える、椎骨部材を離隔させるためのデバイス。
【請求項47】
椎骨部材を離隔させるための方法であって、
前記椎骨部材の間に、第1の方向にあり、第1の高さで隔てられた対向する外部側面を有するスペーサを配置するステップと、
前記スペーサ内の第1の傾斜表面を前記スペーサ内の第2の傾斜表面に対して第2の方向へ移動させ、前記対向する外部側面を前記第1の高さよりも大きい第2の高さに離隔するステップと、
を含む、椎骨部材を離隔させるための方法。
【請求項48】
請求項47に記載の椎骨部材を離隔させるための方法であって、
第2の方向において第1のプラットホーム表面を第2のプラットホーム表面と接触させるステップをさらに含む、方法。
【請求項49】
請求項47に記載の椎骨部材を離隔させるための方法であって、
前記第1の傾斜表面を第1の方向の前記スペーサの近端部から第2の方向のスペーサの遠端部へ移動させるステップをさらに含む、方法。
【請求項50】
請求項47に記載の椎骨部材を離隔させるための方法であって、
解放スリーブを前記移送デバイスに沿って移動させ、対向する傾斜表面を内向きに押して延長部を内向きに引き込んで前記スペーサから取り外すことによって、前記スペーサから前記移送デバイスを取り外すステップをさらに含む、方法。
【請求項51】
請求項47に記載の椎骨部材を離隔させるための方法であって、
前記第1の傾斜表面を前記スペーサ内で前記第2の傾斜表面に対して移動させるステップが、前記第1の傾斜表面または前記第2の傾斜表面の一方をカムで押すステップをさらに含む、方法。
【請求項52】
請求項47に記載の椎骨部材を離隔させるための方法であって、
前記移送デバイス内でカムを回転させ、ライブピボットを内向きに引き込むことによって移送デバイスを前記スペーサから分離させるステップをさらに含む、方法。
【請求項53】
椎骨部材を離隔させるための方法であって、
第1の方向で第1の部材の第1の傾斜表面が第2の部材の第2の傾斜表面から分離している間に前記椎骨部材の間にスペーサを配置するステップと、
前記第1の部材に押圧力を加えるステップと、
前記第1の部材を近位の位置から遠位の位置へ向かって移動させ、前記第1の傾斜表面を前記第2の傾斜表面と係合させるステップと、
前記スペーサの外部側面を、前記第1の方向の第1の距離から、前記第1の傾斜表面が前記第2の傾斜表面と係合するときのより大きな第2の距離まで離隔させるステップと、
を含む、椎骨部材を離隔させるための方法。
【請求項54】
請求項53に記載の椎骨部材を離隔させるための方法であって、
前記第1の部材へ押圧力を加えるステップが、前記第1の部材を、移送デバイスに沿って延びるカムと接触させるステップを含む、方法。
【請求項55】
椎骨部材を離隔させるための方法であって、
第3の部材が第1の部材と第2の部材の間に配置された閉鎖方向で前記椎骨部材の間に前記スペーサを配置するステップと、
前記第3の部材を近位の位置から遠位の位置へ押すステップと、
前記第3の部材が前記近位の位置から前記遠位の位置に向かって移動するとき、前記第1の部材上の第1の傾斜表面を前記第3の部材上の第2の傾斜表面と係合させるステップと、
前記スペーサの幅を広げるステップと、
を含む、椎骨部材を離隔させるための方法。
【請求項56】
請求項54に記載の椎骨部材を離隔させるための方法であって、
前記第3の部材を前記遠位の位置に向かって移動させることによって前記スペーサの幅を増加させるステップをさらに含む、方法。
【請求項57】
椎骨部材を離隔させるための方法であって、
スペーサを移送デバイスに取り付けるステップと、
前記移送デバイスを操作し、前記スペーサを前記椎骨部材の間に配置するステップと、
前記プッシュロッドの遠端部が前記スペーサの第1の部材と接触する状態で前記移送デバイスを通じてプッシュロッドを展開させるステップと、
前記スペーサの前記第1の部材を近位の位置から遠位の位置に向かって移動させるステップと、
前記第1の部材が前記近位の位置から前記遠位の位置に向かって移動するとき、前記第1の部材上の第1の傾斜表面を前記スペーサの第2の部材上の第2の傾斜表面と係合させ、前記スペーサの幅を増加させるステップと、
を含む、椎骨部材を離隔させるための方法。
【請求項58】
請求項57に記載の椎骨部材を離隔させるための方法であって、
前記スペーサを前記移送デバイスに取り付けるステップが、前記移送デバイス上のピボットを前記スペーサ内の開口に取り付けるステップを含む、方法。
【請求項59】
請求項58に記載の椎骨部材を離隔させるための方法であって、
前記プッシュロッドの小さいセクションが前記ピボットと整列され、前記ピボットが前記開口内に引っ込むようにして、前記移送デバイス内の前記プッシュロッドを回転させることによって、前記ピボットを前記開口から分離させるステップをさらに含む、方法。
【請求項60】
請求項57に記載の椎骨部材を離隔させるための方法であって、
スペーサを前記移送デバイスに取り付けるステップが、第1のチューブの遠位の端部上の延長部を前記スペーサ内の開口に取り付けるステップをさらに含む、方法。
【請求項61】
請求項60に記載の椎骨部材を離隔させるための方法であって、
前記延長部を前記開口から分離させるステップを更に含み、
前記延長部を前記開口から分離させるステップが、解放スリーブを前記第1のチューブに沿って移動させ、第1および第2のアームを互いに圧迫し、前記延長部の間の距離を減少させるステップを含む、方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【公表番号】特表2006−516456(P2006−516456A)
【公表日】平成18年7月6日(2006.7.6)
【国際特許分類】
【出願番号】特願2006−503188(P2006−503188)
【出願日】平成16年1月30日(2004.1.30)
【国際出願番号】PCT/US2004/002666
【国際公開番号】WO2004/069033
【国際公開日】平成16年8月19日(2004.8.19)
【出願人】(500273034)エスディージーアイ・ホールディングス・インコーポレーテッド (48)
【Fターム(参考)】
【公表日】平成18年7月6日(2006.7.6)
【国際特許分類】
【出願日】平成16年1月30日(2004.1.30)
【国際出願番号】PCT/US2004/002666
【国際公開番号】WO2004/069033
【国際公開日】平成16年8月19日(2004.8.19)
【出願人】(500273034)エスディージーアイ・ホールディングス・インコーポレーテッド (48)
【Fターム(参考)】
[ Back to top ]