
体動検出パッドおよび医用装置
【課題】撮影技師の経験や、撮影部位に関わらず、被検体の呼吸信号を簡単に測定できる方法を提供する。
【解決手段】クレードルと被検体13との間に設置可能な体動検出パッド5を用いる。体動検出パッド5の内部には、流体を収容する複数の流体収容部51〜5zが内蔵されている。各流体収容部51〜5zは、被検体13から受ける圧力を表す圧力信号を出力する。信号生成手段は、各流体収容部51〜5zの圧力信号に基づいて、呼吸信号を生成する。したがって、ベローズなどの呼吸センサを被検体の腹部に巻かなくても簡便に被検体の体動を検出することができる。
【解決手段】クレードルと被検体13との間に設置可能な体動検出パッド5を用いる。体動検出パッド5の内部には、流体を収容する複数の流体収容部51〜5zが内蔵されている。各流体収容部51〜5zは、被検体13から受ける圧力を表す圧力信号を出力する。信号生成手段は、各流体収容部51〜5zの圧力信号に基づいて、呼吸信号を生成する。したがって、ベローズなどの呼吸センサを被検体の腹部に巻かなくても簡便に被検体の体動を検出することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被検体の体動を検出する体動検出パッドおよび医用装置に関する。
【背景技術】
【0002】
呼吸同期法で被検体を撮影する方法として、ベローズを用いた方法や、ナビゲータエコーを収集する方法が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−036428号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、ベローズを用いる方法では、撮影技師が被検体の腹部にベローズを巻きつける必要があり、手間が掛かるという問題がある。また、ナビゲータエコーを収集する方法は、撮影技師の経験が必要であり、撮影部位によっては、呼吸を計測することができない場合もある。
【0005】
したがって、撮影技師の経験や、撮影部位に関わらず、被検体の呼吸を簡単に検出できる方法が望まれている。
【課題を解決するための手段】
【0006】
本発明の第1の態様は、被検体の下に設置され、前記被検体の体動を検出する体動検出パッドであって、
流体を収容する複数の流体収容部であって、前記被検体の体動により生じる圧力の変化を検出するための複数の流体収容部を有する体動検出パッドである。
【0007】
本発明の第2の態様は、被検体を支持するクレードルと、
前記クレードルと前記被検体との間に配置され、前記被検体の体動を検出する体動検出パッドと、
を有する医用装置であって、
前記体動検出パッドは、
流体を収容する複数の流体収容部であって、前記被検体の体動により生じる圧力の変化を検出するための複数の流体収容部を有する、医用装置である。
【発明の効果】
【0008】
被検体の下に体動検出パッドを設置するだけでよいので、被検体の体動を容易に検出することができる。
【図面の簡単な説明】
【0009】
【図1】第1の形態の体動検出パッドを用いた磁気共鳴装置の概略図である。
【図2】体動検出パッド5の内部構造の説明図である。
【図3】体動検出パッド5を用いて被検体13の呼吸による体動を検出する方法の説明図である。
【図4】第2の形態の体動検出パッド5の内部構造を示す上面図である。
【図5】第2の形態の体動検出パッド5を用いて被検体13の呼吸による体動を検出する方法の説明図である。
【図6】第3の形態のMR装置200の概略図である。
【図7】中央処理装置10の説明図である。
【図8】第3の形態におけるMR装置200の動作フローを示す図である。
【図9】ベースラインの算出方法の説明図である。
【図10】被検体13をスキャンしているときの流体収容部5iにおける圧力信号の時間変化を概略的に示す図である。
【図11】第4の形態のMR装置300の概略図である。
【図12】第5の形態における体動検出パッド5を示す斜視図である。
【発明を実施するための形態】
【0010】
以下、発明を実施するための形態について説明するが、本発明は、以下の形態に限定されることはない。
【0011】
(1)第1の形態
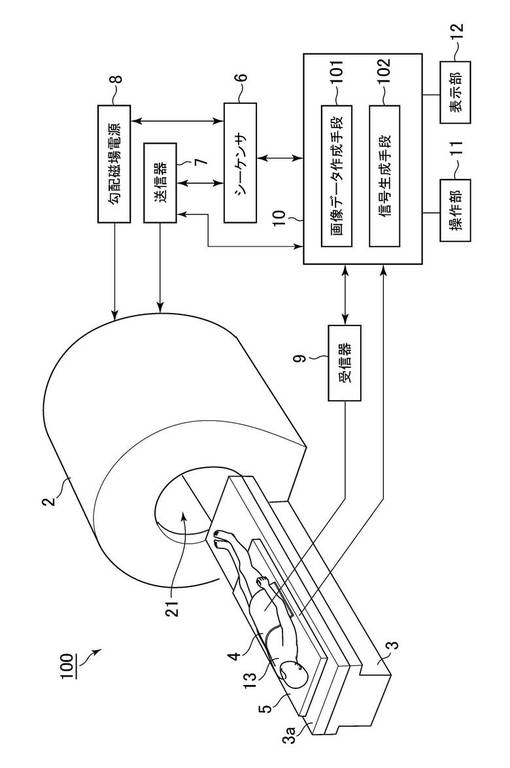
図1は、第1の形態の体動検出パッドを用いた磁気共鳴装置の概略図である。
磁気共鳴装置(以下、「MR装置」と呼ぶ。MR:Magnetic Resonance)100は、マグネット2、テーブル3、受信コイル4などを有している。
【0012】
マグネット2は、被検体13が収容されるボア21を有している。また、マグネット2には、超伝導コイル、勾配コイル、送信コイル(図示せず)などが内蔵されている。
【0013】
テーブル3は、クレードル3aを有している。クレードル3aは、ボア21内に移動できるように構成されている。クレードル3aによって、被検体13はボア21に搬送される。
【0014】
受信コイル4は、被検体13の腹部に取り付けられている。受信コイル4は、被検体13からの磁気共鳴信号を受信する。
【0015】
また、被検体13とクレードル3aとの間には、体動検出パッド5が設置されている。被検体13は、体動検出パッド5上に寝ている。
【0016】
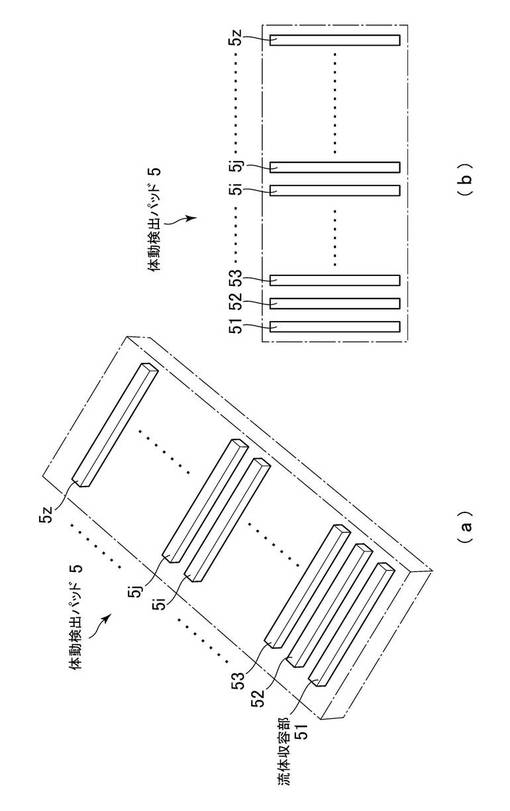
図2は、体動検出パッド5の内部構造の説明図である。
図2(a)は、体動検出パッド5の内部構造を示す斜視図、図2(b)は、上面図である。
【0017】
体動検出パッド5の内部には、流体を収容する複数の流体収容部51〜5zが内蔵されている。複数の流体収容部51〜5zは帯状に構成されている。流体収容部51〜5zに収容されている流体は、気体でもよいし、液体でもよいし、ジェル状の物質でもよい。気体の場合、例えば、空気や、サセプタビリティ変化の小さい窒素などを使用することが好ましい。また、液体の場合、MR信号をほとんど出さないマンガン水溶液を使用することが好ましい。更に、気体、液体、ジェル状の物質の混相を使用してもよい。
【0018】
第1の形態では、体動検出パッド5を用いて被検体の呼吸による体動を検出する。体動検出パッド5を用いて被検体の呼吸による体動を検出する方法については後述する。
図1に戻って説明を続ける。
【0019】
MR装置100は、更に、シーケンサ6、送信器7、勾配磁場電源8、受信器9、中央処理装置10、操作部11、および表示部12を有している。
【0020】
シーケンサ6は、中央処理装置10の制御を受けて、パルスシーケンスの情報を送信器7および勾配磁場電源8に送る。
【0021】
送信器7は、シーケンサ6から送られた情報に基づいて、RFコイルを駆動するための信号を出力する。
【0022】
勾配磁場電源8は、シーケンサ6から送られた情報に基づいて、勾配コイルを駆動するための信号を出力する。
【0023】
受信器9は、受信コイル4で受信された磁気共鳴信号を信号処理し、中央処理装置10に出力する。
【0024】
中央処理装置10は、シーケンサ6および表示部12に必要な情報を伝送したり、受信器9から受け取ったデータに基づいて画像を再構成するなど、MR装置100の各種の動作を実現するように、MR装置100の各部の動作を制御する。中央処理装置10は、例えばコンピュータ(computer)によって構成される。中央処理装置10は、画像データ作成手段101および信号生成手段102などを有している。
【0025】
画像データ作成手段101は、被検体の画像データを作成する。信号生成手段102は、体動検出パッド5の各流体収容部51〜5zからの圧力信号に基づいて、被検体の呼吸信号を生成する。
【0026】
中央処理装置10は、画像データ作成手段101および信号生成手段102を構成する装置の一例であり、所定のプログラムを実行することにより、これらの手段として機能する。
【0027】
操作部11は、オペレータにより操作され、種々の情報を中央処理装置10に入力する。表示部12は種々の情報を表示する。
MR装置100は、上記のように構成されている。
【0028】
次に、体動検出パッド5を用いて被検体の呼吸による体動を検出する方法について、説明する。
【0029】
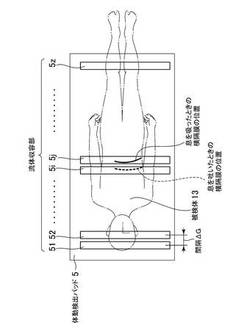
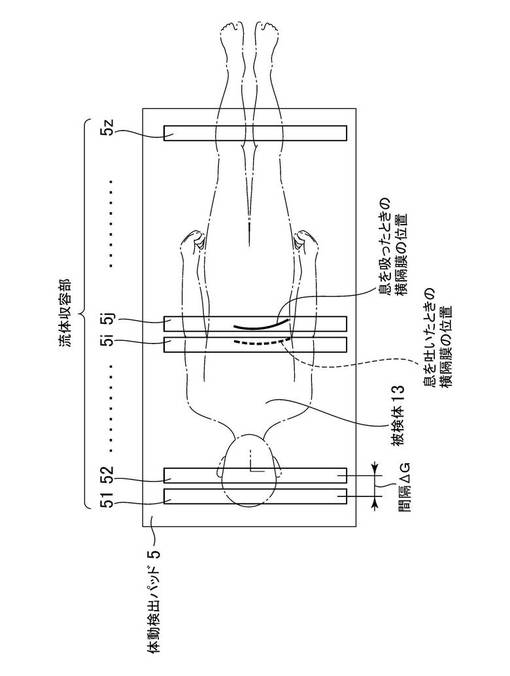
図3は、体動検出パッド5を用いて被検体13の呼吸による体動を検出する方法の説明図である。尚、図3では、説明の便宜上、流体収容部51〜5zのうち、代表して、流体収容部51、52、5i、5j、および5zのみを示してある。また、被検体13が息を吸ったときの横隔膜を実線で示し、息を吐いたときの横隔膜を破線で示してある。
【0030】
複数の流体収容部51〜5zは、被検体13が体動検出パッド5に寝たときに、被検体13の呼吸運動により生じる圧力の変化を検出するために設けられている。被検体の呼吸運動により、腹部の臓器(横隔膜、肺、肝臓など)は動くので、この動きに伴い、複数の流体収容部51〜5zが被検体13から受ける圧力は、時間とともに変化する。したがって、複数の流体収容部51〜5zの圧力の時間変化に基づいて、被検体の呼吸信号を生成することができるので、被検体の呼吸による体動を検出することができる。尚、隣り合う流体収容部の間隔ΔGは、例えば、被検体の呼吸運動による横隔膜の移動距離に基づいて決定することができる。例えば、間隔Δd=5mmとすることができる。
【0031】
第1の形態では、各流体収容部51〜5zは圧力信号を出力し、この圧力信号は、中央処理装置10(図1参照)に送信される。圧力信号が送信されると、信号生成手段102は、各流体収容部51〜5zからの圧力信号に基づいて、呼吸信号を生成する。呼吸信号の生成方法としては、例えば、各流体収容部51〜5zの圧力信号を加算平均する方法がある。また、各流体収容部51〜5zの圧力信号を重み付けし、重み付けされた圧力信号に基づいて、呼吸信号を生成してもよい。重み付けの方法としては、例えば、各流体収容部51〜5zの圧力信号の振幅を比較し、振幅が大きい圧力信号は重み付けを大きくし、一方、振幅が小さい圧力信号は重み付けを小さくする方法がある。
【0032】
MR装置100は、生成された呼吸信号に同期してパルスシーケンスを実行する。したがって、呼吸による体動アーチファクトが低減された画像データを取得することができる。
【0033】
本形態では、体動検出パッド5をクレードル3aに敷いておき、体動検出パッド5の上に被検体13を寝かせるだけで、被検体13の呼吸による体動を検出することができる。したがって、体動検出パッド5は、ベローズ(bellows)やパフ(puff)のように、被検体13の腹部周りに取り付ける必要がないので、オペレータの作業負担を軽減することができる。
【0034】
尚、第1の形態では、信号生成手段102を中央処理装置10に設けている。しかし、信号生成手段102を体動検出パッド5に設けてもよい。
【0035】
また、第1の形態では、被検体の呼吸信号を求めているが、体動検出パッド5を用いて心臓の動きにより生じる圧力信号の時間変化を求めることによって、心拍信号を求めることも可能である。
【0036】
(2)第2の形態
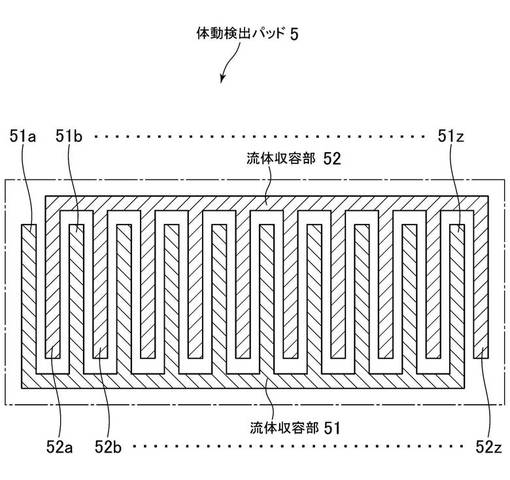
図4は、第2の形態の体動検出パッド5の内部構造を示す上面図である。
体動検出パッド5は、2つの流体収容部51および52を有している。流体収容部51は、流体が収容される複数の枝部51a〜51zに分岐された櫛形構造を有している。流体収容部52も、流体が収容される複数の枝部52a〜52zに分岐された櫛形構造を有している。流体収容部51の枝部51a〜51zは、流体収容部52の枝部52a〜52zと交互に配置されている。
【0037】
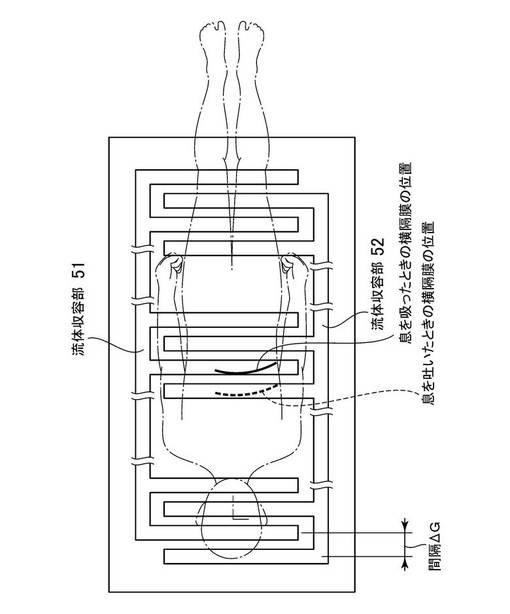
図5は、第2の形態の体動検出パッド5を用いて被検体13の呼吸による体動を検出する方法の説明図である。尚、図5では、説明の便宜上、流体収容部51および52の枝部は、一部の枝部のみが示されている。また、被検体13が息を吸ったときの横隔膜を実線で示し、息を吐いたときの横隔膜を破線で示してある。
【0038】
被検体の呼吸運動により、腹部の臓器(横隔膜、肺、肝臓など)は動くので、この動きに伴い、流体収容部51および52が被検体13から受ける圧力は、時間とともに変化する。したがって、流体収容部51および52の圧力の時間変化に基づいて、被検体の呼吸信号を生成することができるので、被検体の呼吸による体動を検出することができる。尚、流体収容部51および52の枝部の間隔ΔGは、第1の形態と同様に、例えば、被検体の呼吸運動による横隔膜の移動距離に基づいて決定することができる。例えば、間隔Δd=5mmとすることができる。
【0039】
流体収容部の形状を櫛形にすることによって、第1の形態の体動検出パッド5よりも、流体収容部の数を少なくすることができる。したがって、流体収容部と中央処理装置とを接続するための信号線を少なくすることができるので、体動検出パッド5の構造を簡略化することが可能となる。
【0040】
(3)第3の形態
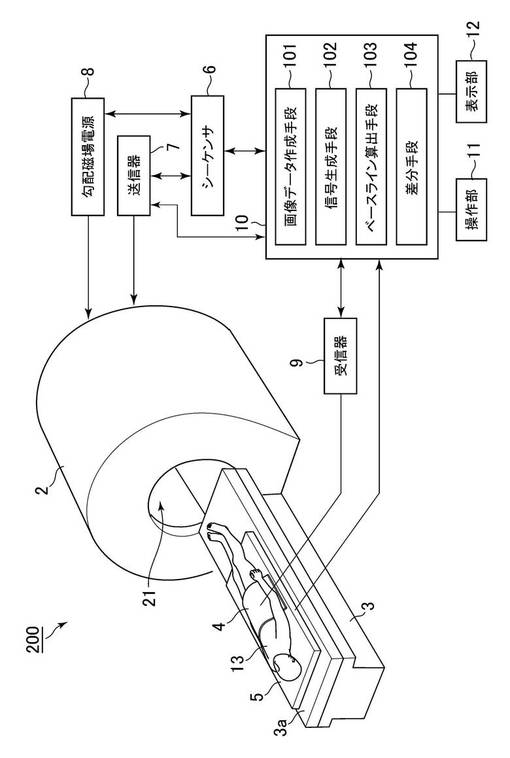
図6は、第3の形態のMR装置200の概略図である。
第3の形態のMR装置200は、第1の形態のMR装置100と比較すると、中央処理装置10が異なるが、その他の構成は、第1の形態のMR装置100と同じである。したがって、第3の形態のMR装置200の説明に当たっては、中央処理装置10について主に説明する。
【0041】
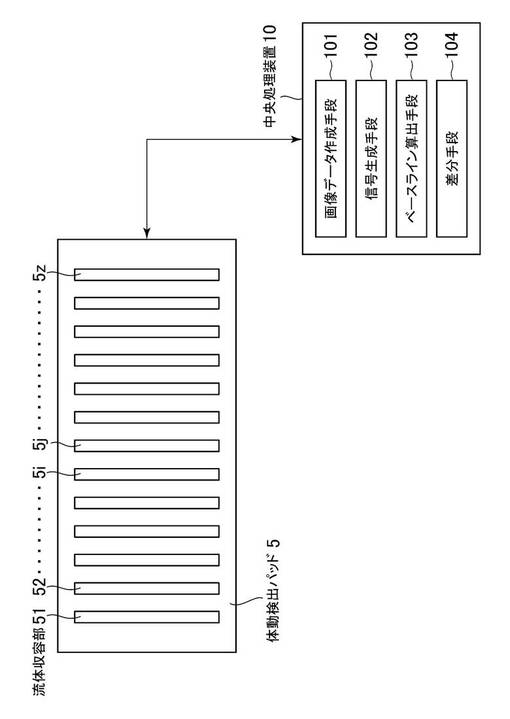
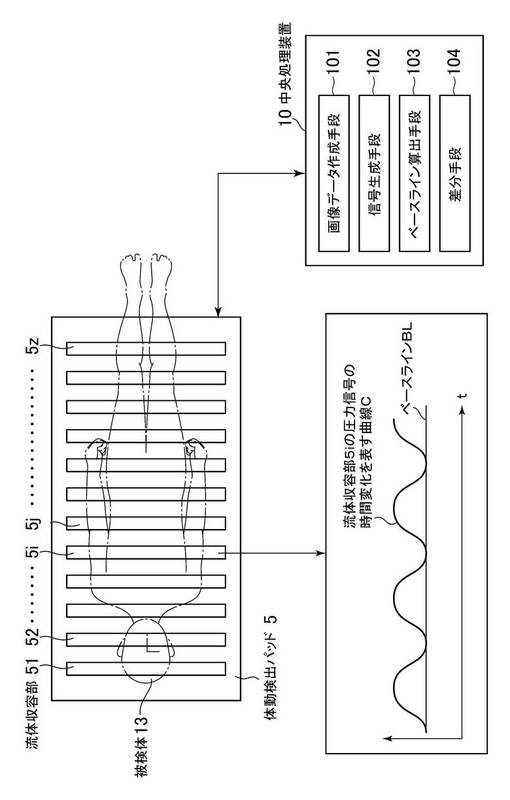
図7は、中央処理装置10の説明図である。
中央処理装置10は、画像データ作成手段101、信号生成手段102、ベースライン算出手段103、および差分手段104などを有している。
【0042】
画像データ作成手段101は、被検体の画像データを作成する。
信号生成手段102は、各流体収容部51〜5zからの圧力信号に基づいて、被検体の呼吸信号を生成する。
ベースライン算出手段103は、各流体収容部51〜5zの圧力の基準値を表すベースラインを算出する。
差分手段104は、各流体収容部51〜5zからの圧力信号と、ベースラインとの差分を求める。
【0043】
以下に、第3の形態のMR装置200の動作について説明する。
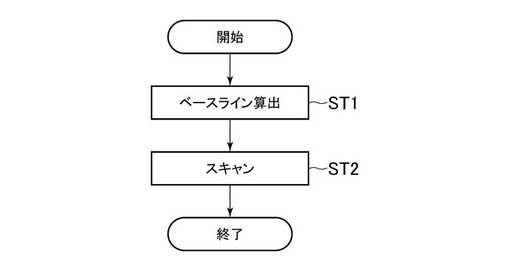
図8は、第3の形態におけるMR装置200の動作フローを示す図である。
【0044】
ステッST1では、各流体収容部ごとに、圧力の基準値を表すベースラインを算出する。
【0045】
図9は、ベースラインの算出方法の説明図である。
ベースラインの算出方法は、どの流体収容部でも同じであるので、ここでは、流体収容部5iを取り上げて、ベースラインの算出方法を説明する。
【0046】
先ず、一定時間に渡って、流体収容部5iの圧力を検出する。図9には、流体収容部5iの圧力信号の時間変化を表す曲線Cが概略的に示されている。ベースライン算出手段103は、曲線Cに基づいて、圧力の基準値を表すベースラインBLを設定する。ここでは、曲線Cに基づいて、被検体が息を吐いたときの圧力値の平均値を求め、この平均値をベースラインBLとして設定する。他の流体収容部のベースラインも、同じ方法で設定する。ベースラインを設定した後、ステップST2に進む。
【0047】
ステップST2では、被検体13をスキャンする。
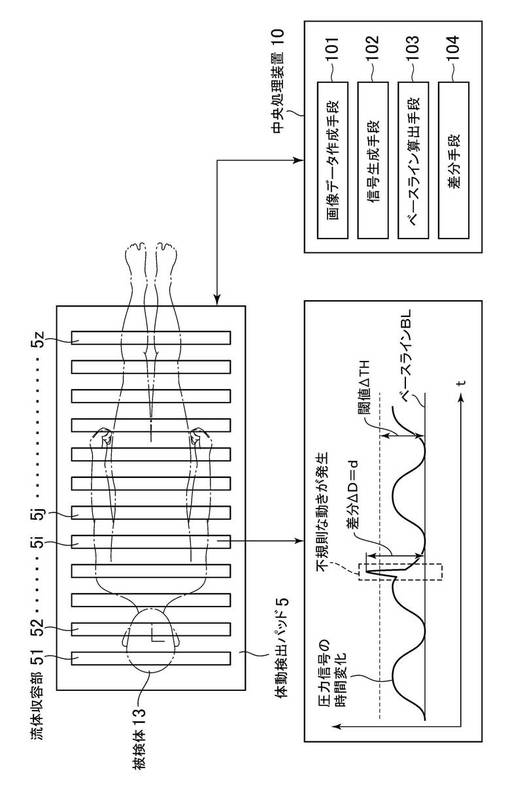
図10は、被検体13をスキャンしているときの流体収容部5iにおける圧力信号の時間変化を概略的に示す図である。
【0048】
差分手段104は、各流体収容部51〜5zの圧力信号とベースラインBLとの差分を求める。スキャン中に被検体13に不規則な動き(例えば、くしゃみ、咳、シャックリ、嚥下)が生じた場合、いずれかの流体収容部の圧力に急峻な変化が見られるので、各流体収容部51〜5zの圧力信号とベースラインBLとの差分を求めることによって、被検体13に不規則な動きが生じたか否かを判断することができる。第3の形態では、圧力信号とベースラインBLとの差分ΔDが閾値ΔTHよりも小さい場合は、被検体13に不規則な動きが生じていないと判断する。一方、差分ΔDが閾値ΔTHを超えた場合は、被検体13に不規則な動きが生じたと判断する。したがって、差分ΔDが閾値ΔTHを超えたときに収集したデータは、画像再構成のデータとして使用しないようにすることができるので、体動アーチファクトが低減された画像データを作成することができ、画質の改善を期待することができる。図10では、不規則な動きが発生したときの差分ΔD=dが、閾値ΔTHを超えているので、このときに収集されたデータは画像再構成のデータとしては使用されない。したがって、画像データの体動アーチファクトを低減することができる。尚、閾値ΔTHの設定方法としては、例えば、ステップST1で得られた圧力信号の振幅を求め、振幅+α(αは正の値)を、閾値ΔTHとして設定する方法がある。この場合、差分ΔDが振幅+αに収まっている限りは、被検体13が不規則な動きをしているとは判断されないので、不規則な動きが発生したか否かの判断結果の信頼性を高めることができる。閾値ΔTHは、流体収容部ごとに異なる値に設定してもよいし、同じ値に設定してもよい。
【0049】
第3の形態では、被検体13が息を吐いた状態の圧力値に基づいてベースラインBLを設定しているが、被検体13の別の呼吸状態(例えば、被検体13が息を吸ってから吐くまでの途中の状態)の圧力値に基づいてベースラインを設定してもよい。
【0050】
また、体動検出パッド5は、被検体13の頭部から大腿部までの範囲をカバーしているので、被検体13の呼吸による体動だけでなく、被検体13の頭部から大腿部までの範囲で生じる体動を検出することが可能である。しかし、頭部のみ、腹部のみなど、特定の部位で生じる体動を検出するように構成してもよい。例えば、頭部の動きを検出する体動検出パッド5を用いることによって、オペレータは、被検体13をスキャンする前に、この被検体13は頭部が動いてしまう身体的傾向があるかどうかを知ることができる。したがって、オペレータは、被検体13をスキャンする前に、頭部の動きのアーチファクトに強い手法(例えば、Propeller、PROMO)で撮影すべきかどうかを判断することができる。
【0051】
尚、第3の形態では、信号生成手段102〜差分手段104を中央処理装置10に設けている。しかし、信号生成手段102〜差分手段104の一部又は全部を体動検出パッド5に設けてもよい。
【0052】
(4)第4の形態
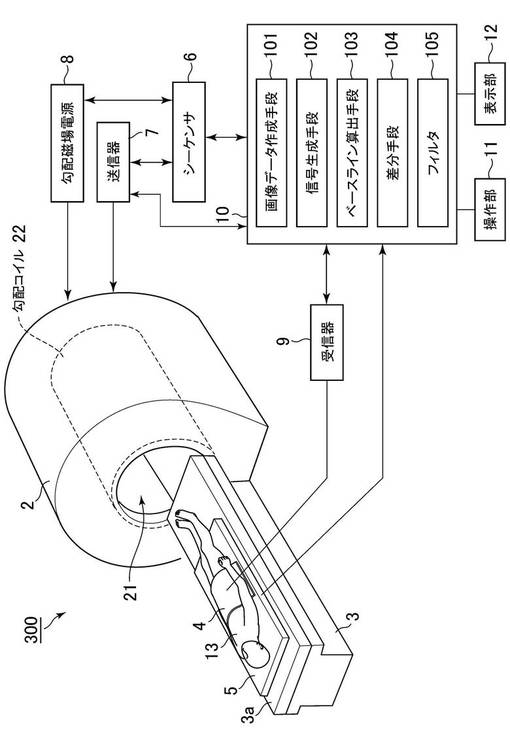
図11は、第4の形態のMR装置300の概略図である。
被検体13をスキャンすると、マグネット2に内蔵されている勾配コイル22が振動するので、勾配コイル22の振動が原因でクレードル3aが振動し、体動検出パッド5の各流体収容部に振動が伝わる可能性がある。体動検出パッド5にこのような振動が伝わると、各流体収容部の圧力信号に、勾配コイル22の振動が原因で生じる振動成分が含まれてしまい、呼吸による体動の検出精度が悪くなる恐れがある。したがって、このような振動成分は除去することが望ましい。そこで、第4の形態では、中央処理装置10に、各流体収容部からの圧力信号に含まれる振動成分を除去するためのフィルタ105が備えられている。
【0053】
勾配コイルの振動が原因で体動検出パッド5の流体に伝わる振動の周波数は、数10Hz〜10000Hz程度であると考えられるが、一方、呼吸は3〜4秒周期(0.33Hz〜0.25Hz程度)である。したがって、10Hz以下の周波数を通過させるようにフィルタ105を構成することによって、勾配コイルの振動が原因で流体収容部の圧力信号に含まれた振動成分を除去することができるので、呼吸による体動の検出精度を向上させることができる。
尚、フィルタ105は、体動検出パッド5に設けてもよい。
【0054】
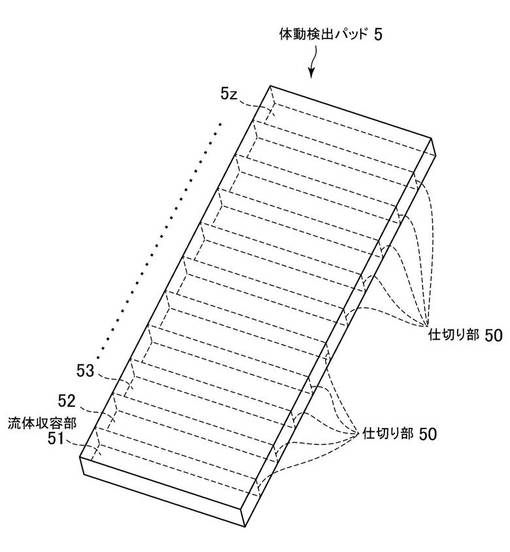
(5)第5の形態
図12は、第5の形態における体動検出パッド5を示す斜視図である。
体動検出パッド5は、体動検出パッド5の内部を複数の空間に仕切るための仕切り部50が設けられている。これらの仕切り部50によって、体動検出パッド5の内部に複数の流体収容部51〜5zが形成される。第5の形態では、仕切り部50の厚さを薄くすることにより、隣接する流体収容部の間隔を狭めることができるので、被検体の体動の検出精度を高めることが可能となる。
【0055】
尚、流体収容部の構造は、第1〜第5の形態に限定されることはなく、種々の変形が可能である。例えば、複数の流体収容部をマトリックス状に設けてもよいし、放射状に広がるように設けてもよい。また、流体収容部の形状をらせん状に構成してもよい。更に、被検体の体動を検出することができるのであれば、複数の流体収容部は部分的に重なるように構成してもよい。
【0056】
また、本発明の体動検出パッドは、被検体の下に敷くだけで被検体の体動を検出することができるので、被検体が仰向けになれず横向きにしかなれない場合でも、体動を検出することが可能となる。
【符号の説明】
【0057】
2 マグネット
3 テーブル
3a クレードル
6 シーケンサ
7 送信器
8 勾配磁場電源
9 受信器
10 中央処理装置
11 操作部
12 表示部
13 被検体
100、200、300 MR装置
101 画像データ作成手段
102 信号生成手段
103 ベースライン算出手段
104 差分手段
105 フィルタ
【技術分野】
【0001】
本発明は、被検体の体動を検出する体動検出パッドおよび医用装置に関する。
【背景技術】
【0002】
呼吸同期法で被検体を撮影する方法として、ベローズを用いた方法や、ナビゲータエコーを収集する方法が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−036428号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、ベローズを用いる方法では、撮影技師が被検体の腹部にベローズを巻きつける必要があり、手間が掛かるという問題がある。また、ナビゲータエコーを収集する方法は、撮影技師の経験が必要であり、撮影部位によっては、呼吸を計測することができない場合もある。
【0005】
したがって、撮影技師の経験や、撮影部位に関わらず、被検体の呼吸を簡単に検出できる方法が望まれている。
【課題を解決するための手段】
【0006】
本発明の第1の態様は、被検体の下に設置され、前記被検体の体動を検出する体動検出パッドであって、
流体を収容する複数の流体収容部であって、前記被検体の体動により生じる圧力の変化を検出するための複数の流体収容部を有する体動検出パッドである。
【0007】
本発明の第2の態様は、被検体を支持するクレードルと、
前記クレードルと前記被検体との間に配置され、前記被検体の体動を検出する体動検出パッドと、
を有する医用装置であって、
前記体動検出パッドは、
流体を収容する複数の流体収容部であって、前記被検体の体動により生じる圧力の変化を検出するための複数の流体収容部を有する、医用装置である。
【発明の効果】
【0008】
被検体の下に体動検出パッドを設置するだけでよいので、被検体の体動を容易に検出することができる。
【図面の簡単な説明】
【0009】
【図1】第1の形態の体動検出パッドを用いた磁気共鳴装置の概略図である。
【図2】体動検出パッド5の内部構造の説明図である。
【図3】体動検出パッド5を用いて被検体13の呼吸による体動を検出する方法の説明図である。
【図4】第2の形態の体動検出パッド5の内部構造を示す上面図である。
【図5】第2の形態の体動検出パッド5を用いて被検体13の呼吸による体動を検出する方法の説明図である。
【図6】第3の形態のMR装置200の概略図である。
【図7】中央処理装置10の説明図である。
【図8】第3の形態におけるMR装置200の動作フローを示す図である。
【図9】ベースラインの算出方法の説明図である。
【図10】被検体13をスキャンしているときの流体収容部5iにおける圧力信号の時間変化を概略的に示す図である。
【図11】第4の形態のMR装置300の概略図である。
【図12】第5の形態における体動検出パッド5を示す斜視図である。
【発明を実施するための形態】
【0010】
以下、発明を実施するための形態について説明するが、本発明は、以下の形態に限定されることはない。
【0011】
(1)第1の形態
図1は、第1の形態の体動検出パッドを用いた磁気共鳴装置の概略図である。
磁気共鳴装置(以下、「MR装置」と呼ぶ。MR:Magnetic Resonance)100は、マグネット2、テーブル3、受信コイル4などを有している。
【0012】
マグネット2は、被検体13が収容されるボア21を有している。また、マグネット2には、超伝導コイル、勾配コイル、送信コイル(図示せず)などが内蔵されている。
【0013】
テーブル3は、クレードル3aを有している。クレードル3aは、ボア21内に移動できるように構成されている。クレードル3aによって、被検体13はボア21に搬送される。
【0014】
受信コイル4は、被検体13の腹部に取り付けられている。受信コイル4は、被検体13からの磁気共鳴信号を受信する。
【0015】
また、被検体13とクレードル3aとの間には、体動検出パッド5が設置されている。被検体13は、体動検出パッド5上に寝ている。
【0016】
図2は、体動検出パッド5の内部構造の説明図である。
図2(a)は、体動検出パッド5の内部構造を示す斜視図、図2(b)は、上面図である。
【0017】
体動検出パッド5の内部には、流体を収容する複数の流体収容部51〜5zが内蔵されている。複数の流体収容部51〜5zは帯状に構成されている。流体収容部51〜5zに収容されている流体は、気体でもよいし、液体でもよいし、ジェル状の物質でもよい。気体の場合、例えば、空気や、サセプタビリティ変化の小さい窒素などを使用することが好ましい。また、液体の場合、MR信号をほとんど出さないマンガン水溶液を使用することが好ましい。更に、気体、液体、ジェル状の物質の混相を使用してもよい。
【0018】
第1の形態では、体動検出パッド5を用いて被検体の呼吸による体動を検出する。体動検出パッド5を用いて被検体の呼吸による体動を検出する方法については後述する。
図1に戻って説明を続ける。
【0019】
MR装置100は、更に、シーケンサ6、送信器7、勾配磁場電源8、受信器9、中央処理装置10、操作部11、および表示部12を有している。
【0020】
シーケンサ6は、中央処理装置10の制御を受けて、パルスシーケンスの情報を送信器7および勾配磁場電源8に送る。
【0021】
送信器7は、シーケンサ6から送られた情報に基づいて、RFコイルを駆動するための信号を出力する。
【0022】
勾配磁場電源8は、シーケンサ6から送られた情報に基づいて、勾配コイルを駆動するための信号を出力する。
【0023】
受信器9は、受信コイル4で受信された磁気共鳴信号を信号処理し、中央処理装置10に出力する。
【0024】
中央処理装置10は、シーケンサ6および表示部12に必要な情報を伝送したり、受信器9から受け取ったデータに基づいて画像を再構成するなど、MR装置100の各種の動作を実現するように、MR装置100の各部の動作を制御する。中央処理装置10は、例えばコンピュータ(computer)によって構成される。中央処理装置10は、画像データ作成手段101および信号生成手段102などを有している。
【0025】
画像データ作成手段101は、被検体の画像データを作成する。信号生成手段102は、体動検出パッド5の各流体収容部51〜5zからの圧力信号に基づいて、被検体の呼吸信号を生成する。
【0026】
中央処理装置10は、画像データ作成手段101および信号生成手段102を構成する装置の一例であり、所定のプログラムを実行することにより、これらの手段として機能する。
【0027】
操作部11は、オペレータにより操作され、種々の情報を中央処理装置10に入力する。表示部12は種々の情報を表示する。
MR装置100は、上記のように構成されている。
【0028】
次に、体動検出パッド5を用いて被検体の呼吸による体動を検出する方法について、説明する。
【0029】
図3は、体動検出パッド5を用いて被検体13の呼吸による体動を検出する方法の説明図である。尚、図3では、説明の便宜上、流体収容部51〜5zのうち、代表して、流体収容部51、52、5i、5j、および5zのみを示してある。また、被検体13が息を吸ったときの横隔膜を実線で示し、息を吐いたときの横隔膜を破線で示してある。
【0030】
複数の流体収容部51〜5zは、被検体13が体動検出パッド5に寝たときに、被検体13の呼吸運動により生じる圧力の変化を検出するために設けられている。被検体の呼吸運動により、腹部の臓器(横隔膜、肺、肝臓など)は動くので、この動きに伴い、複数の流体収容部51〜5zが被検体13から受ける圧力は、時間とともに変化する。したがって、複数の流体収容部51〜5zの圧力の時間変化に基づいて、被検体の呼吸信号を生成することができるので、被検体の呼吸による体動を検出することができる。尚、隣り合う流体収容部の間隔ΔGは、例えば、被検体の呼吸運動による横隔膜の移動距離に基づいて決定することができる。例えば、間隔Δd=5mmとすることができる。
【0031】
第1の形態では、各流体収容部51〜5zは圧力信号を出力し、この圧力信号は、中央処理装置10(図1参照)に送信される。圧力信号が送信されると、信号生成手段102は、各流体収容部51〜5zからの圧力信号に基づいて、呼吸信号を生成する。呼吸信号の生成方法としては、例えば、各流体収容部51〜5zの圧力信号を加算平均する方法がある。また、各流体収容部51〜5zの圧力信号を重み付けし、重み付けされた圧力信号に基づいて、呼吸信号を生成してもよい。重み付けの方法としては、例えば、各流体収容部51〜5zの圧力信号の振幅を比較し、振幅が大きい圧力信号は重み付けを大きくし、一方、振幅が小さい圧力信号は重み付けを小さくする方法がある。
【0032】
MR装置100は、生成された呼吸信号に同期してパルスシーケンスを実行する。したがって、呼吸による体動アーチファクトが低減された画像データを取得することができる。
【0033】
本形態では、体動検出パッド5をクレードル3aに敷いておき、体動検出パッド5の上に被検体13を寝かせるだけで、被検体13の呼吸による体動を検出することができる。したがって、体動検出パッド5は、ベローズ(bellows)やパフ(puff)のように、被検体13の腹部周りに取り付ける必要がないので、オペレータの作業負担を軽減することができる。
【0034】
尚、第1の形態では、信号生成手段102を中央処理装置10に設けている。しかし、信号生成手段102を体動検出パッド5に設けてもよい。
【0035】
また、第1の形態では、被検体の呼吸信号を求めているが、体動検出パッド5を用いて心臓の動きにより生じる圧力信号の時間変化を求めることによって、心拍信号を求めることも可能である。
【0036】
(2)第2の形態
図4は、第2の形態の体動検出パッド5の内部構造を示す上面図である。
体動検出パッド5は、2つの流体収容部51および52を有している。流体収容部51は、流体が収容される複数の枝部51a〜51zに分岐された櫛形構造を有している。流体収容部52も、流体が収容される複数の枝部52a〜52zに分岐された櫛形構造を有している。流体収容部51の枝部51a〜51zは、流体収容部52の枝部52a〜52zと交互に配置されている。
【0037】
図5は、第2の形態の体動検出パッド5を用いて被検体13の呼吸による体動を検出する方法の説明図である。尚、図5では、説明の便宜上、流体収容部51および52の枝部は、一部の枝部のみが示されている。また、被検体13が息を吸ったときの横隔膜を実線で示し、息を吐いたときの横隔膜を破線で示してある。
【0038】
被検体の呼吸運動により、腹部の臓器(横隔膜、肺、肝臓など)は動くので、この動きに伴い、流体収容部51および52が被検体13から受ける圧力は、時間とともに変化する。したがって、流体収容部51および52の圧力の時間変化に基づいて、被検体の呼吸信号を生成することができるので、被検体の呼吸による体動を検出することができる。尚、流体収容部51および52の枝部の間隔ΔGは、第1の形態と同様に、例えば、被検体の呼吸運動による横隔膜の移動距離に基づいて決定することができる。例えば、間隔Δd=5mmとすることができる。
【0039】
流体収容部の形状を櫛形にすることによって、第1の形態の体動検出パッド5よりも、流体収容部の数を少なくすることができる。したがって、流体収容部と中央処理装置とを接続するための信号線を少なくすることができるので、体動検出パッド5の構造を簡略化することが可能となる。
【0040】
(3)第3の形態
図6は、第3の形態のMR装置200の概略図である。
第3の形態のMR装置200は、第1の形態のMR装置100と比較すると、中央処理装置10が異なるが、その他の構成は、第1の形態のMR装置100と同じである。したがって、第3の形態のMR装置200の説明に当たっては、中央処理装置10について主に説明する。
【0041】
図7は、中央処理装置10の説明図である。
中央処理装置10は、画像データ作成手段101、信号生成手段102、ベースライン算出手段103、および差分手段104などを有している。
【0042】
画像データ作成手段101は、被検体の画像データを作成する。
信号生成手段102は、各流体収容部51〜5zからの圧力信号に基づいて、被検体の呼吸信号を生成する。
ベースライン算出手段103は、各流体収容部51〜5zの圧力の基準値を表すベースラインを算出する。
差分手段104は、各流体収容部51〜5zからの圧力信号と、ベースラインとの差分を求める。
【0043】
以下に、第3の形態のMR装置200の動作について説明する。
図8は、第3の形態におけるMR装置200の動作フローを示す図である。
【0044】
ステッST1では、各流体収容部ごとに、圧力の基準値を表すベースラインを算出する。
【0045】
図9は、ベースラインの算出方法の説明図である。
ベースラインの算出方法は、どの流体収容部でも同じであるので、ここでは、流体収容部5iを取り上げて、ベースラインの算出方法を説明する。
【0046】
先ず、一定時間に渡って、流体収容部5iの圧力を検出する。図9には、流体収容部5iの圧力信号の時間変化を表す曲線Cが概略的に示されている。ベースライン算出手段103は、曲線Cに基づいて、圧力の基準値を表すベースラインBLを設定する。ここでは、曲線Cに基づいて、被検体が息を吐いたときの圧力値の平均値を求め、この平均値をベースラインBLとして設定する。他の流体収容部のベースラインも、同じ方法で設定する。ベースラインを設定した後、ステップST2に進む。
【0047】
ステップST2では、被検体13をスキャンする。
図10は、被検体13をスキャンしているときの流体収容部5iにおける圧力信号の時間変化を概略的に示す図である。
【0048】
差分手段104は、各流体収容部51〜5zの圧力信号とベースラインBLとの差分を求める。スキャン中に被検体13に不規則な動き(例えば、くしゃみ、咳、シャックリ、嚥下)が生じた場合、いずれかの流体収容部の圧力に急峻な変化が見られるので、各流体収容部51〜5zの圧力信号とベースラインBLとの差分を求めることによって、被検体13に不規則な動きが生じたか否かを判断することができる。第3の形態では、圧力信号とベースラインBLとの差分ΔDが閾値ΔTHよりも小さい場合は、被検体13に不規則な動きが生じていないと判断する。一方、差分ΔDが閾値ΔTHを超えた場合は、被検体13に不規則な動きが生じたと判断する。したがって、差分ΔDが閾値ΔTHを超えたときに収集したデータは、画像再構成のデータとして使用しないようにすることができるので、体動アーチファクトが低減された画像データを作成することができ、画質の改善を期待することができる。図10では、不規則な動きが発生したときの差分ΔD=dが、閾値ΔTHを超えているので、このときに収集されたデータは画像再構成のデータとしては使用されない。したがって、画像データの体動アーチファクトを低減することができる。尚、閾値ΔTHの設定方法としては、例えば、ステップST1で得られた圧力信号の振幅を求め、振幅+α(αは正の値)を、閾値ΔTHとして設定する方法がある。この場合、差分ΔDが振幅+αに収まっている限りは、被検体13が不規則な動きをしているとは判断されないので、不規則な動きが発生したか否かの判断結果の信頼性を高めることができる。閾値ΔTHは、流体収容部ごとに異なる値に設定してもよいし、同じ値に設定してもよい。
【0049】
第3の形態では、被検体13が息を吐いた状態の圧力値に基づいてベースラインBLを設定しているが、被検体13の別の呼吸状態(例えば、被検体13が息を吸ってから吐くまでの途中の状態)の圧力値に基づいてベースラインを設定してもよい。
【0050】
また、体動検出パッド5は、被検体13の頭部から大腿部までの範囲をカバーしているので、被検体13の呼吸による体動だけでなく、被検体13の頭部から大腿部までの範囲で生じる体動を検出することが可能である。しかし、頭部のみ、腹部のみなど、特定の部位で生じる体動を検出するように構成してもよい。例えば、頭部の動きを検出する体動検出パッド5を用いることによって、オペレータは、被検体13をスキャンする前に、この被検体13は頭部が動いてしまう身体的傾向があるかどうかを知ることができる。したがって、オペレータは、被検体13をスキャンする前に、頭部の動きのアーチファクトに強い手法(例えば、Propeller、PROMO)で撮影すべきかどうかを判断することができる。
【0051】
尚、第3の形態では、信号生成手段102〜差分手段104を中央処理装置10に設けている。しかし、信号生成手段102〜差分手段104の一部又は全部を体動検出パッド5に設けてもよい。
【0052】
(4)第4の形態
図11は、第4の形態のMR装置300の概略図である。
被検体13をスキャンすると、マグネット2に内蔵されている勾配コイル22が振動するので、勾配コイル22の振動が原因でクレードル3aが振動し、体動検出パッド5の各流体収容部に振動が伝わる可能性がある。体動検出パッド5にこのような振動が伝わると、各流体収容部の圧力信号に、勾配コイル22の振動が原因で生じる振動成分が含まれてしまい、呼吸による体動の検出精度が悪くなる恐れがある。したがって、このような振動成分は除去することが望ましい。そこで、第4の形態では、中央処理装置10に、各流体収容部からの圧力信号に含まれる振動成分を除去するためのフィルタ105が備えられている。
【0053】
勾配コイルの振動が原因で体動検出パッド5の流体に伝わる振動の周波数は、数10Hz〜10000Hz程度であると考えられるが、一方、呼吸は3〜4秒周期(0.33Hz〜0.25Hz程度)である。したがって、10Hz以下の周波数を通過させるようにフィルタ105を構成することによって、勾配コイルの振動が原因で流体収容部の圧力信号に含まれた振動成分を除去することができるので、呼吸による体動の検出精度を向上させることができる。
尚、フィルタ105は、体動検出パッド5に設けてもよい。
【0054】
(5)第5の形態
図12は、第5の形態における体動検出パッド5を示す斜視図である。
体動検出パッド5は、体動検出パッド5の内部を複数の空間に仕切るための仕切り部50が設けられている。これらの仕切り部50によって、体動検出パッド5の内部に複数の流体収容部51〜5zが形成される。第5の形態では、仕切り部50の厚さを薄くすることにより、隣接する流体収容部の間隔を狭めることができるので、被検体の体動の検出精度を高めることが可能となる。
【0055】
尚、流体収容部の構造は、第1〜第5の形態に限定されることはなく、種々の変形が可能である。例えば、複数の流体収容部をマトリックス状に設けてもよいし、放射状に広がるように設けてもよい。また、流体収容部の形状をらせん状に構成してもよい。更に、被検体の体動を検出することができるのであれば、複数の流体収容部は部分的に重なるように構成してもよい。
【0056】
また、本発明の体動検出パッドは、被検体の下に敷くだけで被検体の体動を検出することができるので、被検体が仰向けになれず横向きにしかなれない場合でも、体動を検出することが可能となる。
【符号の説明】
【0057】
2 マグネット
3 テーブル
3a クレードル
6 シーケンサ
7 送信器
8 勾配磁場電源
9 受信器
10 中央処理装置
11 操作部
12 表示部
13 被検体
100、200、300 MR装置
101 画像データ作成手段
102 信号生成手段
103 ベースライン算出手段
104 差分手段
105 フィルタ
【特許請求の範囲】
【請求項1】
被検体の下に設置され、前記被検体の体動を検出する体動検出パッドであって、
流体を収容する複数の流体収容部であって、前記被検体の体動により生じる圧力の変化を検出するための複数の流体収容部を有する体動検出パッド。
【請求項2】
前記流体収容部は帯状に設けられている、請求項1に記載の体動検出パッド。
【請求項3】
前記流体収容部は櫛状に設けられている、請求項1に記載の体動検出パッド。
【請求項4】
前記複数の流体収容部から出力される圧力信号に基づいて、前記被検体の体動を表す体動信号を生成する信号生成手段を有する、請求項1〜3のうちのいずれか一項に記載の体動検出パッド。
【請求項5】
前記体動信号は、前記被検体の呼吸信号である、請求項4に記載の体動検出パッド。
【請求項6】
各流体収容部の圧力の基準値を表すベースラインを算出するベースライン算出手段と、
前記各流体収容部から出力される圧力信号と、前記ベースラインとの差分を求める差分手段と、
を有する、請求項4又は5に記載の体動検出パッド。
【請求項7】
前記被検体を撮影する医用装置の振動が原因で前記圧力信号に含まれた振動成分を除去するフィルタを有する、請求項4〜6のうちのいずれか一項に記載の体動検出パッド。
【請求項8】
被検体を支持するクレードルと、
前記クレードルと前記被検体との間に配置され、前記被検体の体動を検出する体動検出パッドと、
を有する医用装置であって、
前記体動検出パッドは、
流体を収容する複数の流体収容部であって、前記被検体の体動により生じる圧力の変化を検出するための複数の流体収容部を有する、医用装置。
【請求項9】
前記流体収容部は帯状に設けられている、請求項8に記載の医用装置。
【請求項10】
前記流体収容部は櫛状に設けられている、請求項8に記載の医用装置。
【請求項11】
前記複数の流体収容部から出力される圧力信号に基づいて、前記被検体の体動を表す体動信号を生成する信号生成手段、を有する請求項8〜10のうちのいずれか一項に記載の医用装置。
【請求項12】
前記体動信号は、前記被検体の呼吸を表す呼吸信号である、請求項11に記載の医用装置。
【請求項13】
各流体収容部の圧力の基準値を表すベースラインを算出するベースライン算出手段と、
前記各流体収容部から出力される圧力信号と、前記ベースラインとの差分を求める差分手段と、
を有する請求項8〜12のうちのいずれか一項に記載の医用装置。
【請求項14】
前記医用装置の振動が原因で前記圧力信号に含まれた振動成分を除去するフィルタを有する、請求項11〜13のうちのいずれか一項に記載の医用装置。
【請求項15】
前記医用装置は、磁気共鳴装置であり、
前記フィルタは、前記磁気共鳴装置の勾配コイルが原因で前記圧力信号に含まれた振動成分を除去する、請求項14に記載の医用装置。
【請求項1】
被検体の下に設置され、前記被検体の体動を検出する体動検出パッドであって、
流体を収容する複数の流体収容部であって、前記被検体の体動により生じる圧力の変化を検出するための複数の流体収容部を有する体動検出パッド。
【請求項2】
前記流体収容部は帯状に設けられている、請求項1に記載の体動検出パッド。
【請求項3】
前記流体収容部は櫛状に設けられている、請求項1に記載の体動検出パッド。
【請求項4】
前記複数の流体収容部から出力される圧力信号に基づいて、前記被検体の体動を表す体動信号を生成する信号生成手段を有する、請求項1〜3のうちのいずれか一項に記載の体動検出パッド。
【請求項5】
前記体動信号は、前記被検体の呼吸信号である、請求項4に記載の体動検出パッド。
【請求項6】
各流体収容部の圧力の基準値を表すベースラインを算出するベースライン算出手段と、
前記各流体収容部から出力される圧力信号と、前記ベースラインとの差分を求める差分手段と、
を有する、請求項4又は5に記載の体動検出パッド。
【請求項7】
前記被検体を撮影する医用装置の振動が原因で前記圧力信号に含まれた振動成分を除去するフィルタを有する、請求項4〜6のうちのいずれか一項に記載の体動検出パッド。
【請求項8】
被検体を支持するクレードルと、
前記クレードルと前記被検体との間に配置され、前記被検体の体動を検出する体動検出パッドと、
を有する医用装置であって、
前記体動検出パッドは、
流体を収容する複数の流体収容部であって、前記被検体の体動により生じる圧力の変化を検出するための複数の流体収容部を有する、医用装置。
【請求項9】
前記流体収容部は帯状に設けられている、請求項8に記載の医用装置。
【請求項10】
前記流体収容部は櫛状に設けられている、請求項8に記載の医用装置。
【請求項11】
前記複数の流体収容部から出力される圧力信号に基づいて、前記被検体の体動を表す体動信号を生成する信号生成手段、を有する請求項8〜10のうちのいずれか一項に記載の医用装置。
【請求項12】
前記体動信号は、前記被検体の呼吸を表す呼吸信号である、請求項11に記載の医用装置。
【請求項13】
各流体収容部の圧力の基準値を表すベースラインを算出するベースライン算出手段と、
前記各流体収容部から出力される圧力信号と、前記ベースラインとの差分を求める差分手段と、
を有する請求項8〜12のうちのいずれか一項に記載の医用装置。
【請求項14】
前記医用装置の振動が原因で前記圧力信号に含まれた振動成分を除去するフィルタを有する、請求項11〜13のうちのいずれか一項に記載の医用装置。
【請求項15】
前記医用装置は、磁気共鳴装置であり、
前記フィルタは、前記磁気共鳴装置の勾配コイルが原因で前記圧力信号に含まれた振動成分を除去する、請求項14に記載の医用装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−111347(P2013−111347A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−261553(P2011−261553)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(300019238)ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー (1,125)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(300019238)ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー (1,125)
【Fターム(参考)】
[ Back to top ]