
体組成測定装置

【課題】人体の所定部位の周囲の長さが測定対象者毎に異なる場合であっても、体組成を精度良く測定することのできる体組成測定装置を提供する。
【解決手段】体組成測定装置1は、電流電極対20と、電圧電極対30Aと、電圧電極対30Aの位置を調整する調整機構4とを備える。人体の所定部位を輪切りにしたときの同部位の断面を基準断面とし、周囲の長さが異なって互いに相似する2つの基準断面を第1基準断面および第2基準断面とする。電圧電極対30Aが第1基準断面の外周に対応する位置にあるときの第1基準断面の外周の長さに対する電圧電極31,32間の距離の比を第1の比とし、電圧電極対30Aが第2基準断面の外周に対応する位置にあるときの、第2基準断面の外周の長さに対する電圧電極31,32間の距離の比を第2の比としたときに、調整機構4は、第1の比と第2の比とが同じものになるように電圧電極対30Aの位置を調整する。
【解決手段】体組成測定装置1は、電流電極対20と、電圧電極対30Aと、電圧電極対30Aの位置を調整する調整機構4とを備える。人体の所定部位を輪切りにしたときの同部位の断面を基準断面とし、周囲の長さが異なって互いに相似する2つの基準断面を第1基準断面および第2基準断面とする。電圧電極対30Aが第1基準断面の外周に対応する位置にあるときの第1基準断面の外周の長さに対する電圧電極31,32間の距離の比を第1の比とし、電圧電極対30Aが第2基準断面の外周に対応する位置にあるときの、第2基準断面の外周の長さに対する電圧電極31,32間の距離の比を第2の比としたときに、調整機構4は、第1の比と第2の比とが同じものになるように電圧電極対30Aの位置を調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、第1の電流電極および第2の電流電極を含む電流電極対と、第1の電圧電極および第2の電圧電極を含む電圧電極対とを備える体組成測定装置に関する。
【背景技術】
【0002】
脂肪や筋肉等の人体の体組成の電気的抵抗が異なることを利用して体組成を測定する体脂肪測定装置が知られている。上記体脂肪測定装置として、特許文献1には、電極を帯の中に組み込んだものが記載されている。また、特許文献2には、電極を有する筐体部の各々が分離できるように構成されたものが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−309123号公報
【特許文献2】特開2001−190513号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、体組成を測定する際には、電圧を測定するための電圧電極対を人体の所定部位に適切に接触させる必要がある。しかし、特許文献1に記載されるものでは、体型の違いによって、以下に説明するように体組成を精度良く測定することができないおそれがある。
【0005】
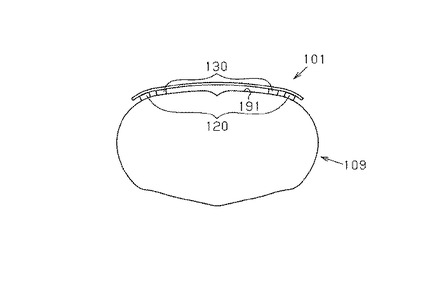
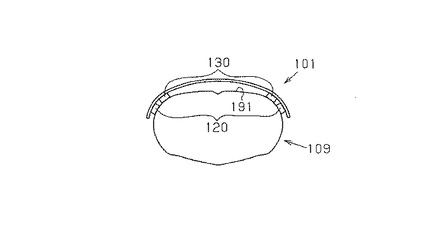
図27に示すように、例えば、腹部191における体組成を測定する体組成測定装置101において、測定対象者の腹囲が大きい場合には、電流電極対120および電圧電極対130が、人体109の前面寄りに設けられる。また、図28に示すように、例えば、測定対象者の腹囲が小さい場合には、電流電極対120および電圧電極対130が、人体109の側面寄りに設けられる。このように、腹囲の大きさが異なれば、電圧電極対130を用いて測定される体組成が体型に見合ったものでなくなり、体脂肪の測定に誤差が生じるという問題がある。
【0006】
また、特許文献2に記載されるものは、電圧電極対を構成する電極を測定対象者の任意の位置に設けることができるものの、その配置の自由度が高すぎるため、電圧電極対が適切に配置されないおそれがある。従って、特許文献2に記載されるものでも、体組成を精度良く測定することができないおそれがある。
【0007】
本発明はこのような実情に鑑みてなされたものであり、その目的は、人体の所定部位の周囲の長さが測定対象者毎に異なる場合であっても、体組成を精度良く測定することのできる体組成測定装置を提供することにある。
【課題を解決するための手段】
【0008】
以下、上記目的を達成するための手段について記載する。
・本発明の体組成測定装置は、第1の電流電極および第2の電流電極を含む電流電極対と、第1の電圧電極および第2の電圧電極を含む電圧電極対とを備える体組成測定装置において、人体の所定部位を輪切りにしたときの同部位の断面を基準断面として、周囲の長さが異なって互いに相似する2つの基準断面を第1の基準断面および第2の基準断面とし、前記電圧電極対の位置を調整する調整機構を備え、前記電圧電極対が前記第1の基準断面の外周に対応する位置にあるときの、前記第1の基準断面の外周の長さに対する前記第1の電圧電極と前記第2の電圧電極との距離の比を第1の比とし、前記電圧電極対が前記第2の基準断面の外周に対応する位置にあるときの、前記第2の基準断面の外周の長さに対する前記第1の電圧電極と前記第2の電圧電極との距離の比を第2の比としたときに、前記調整機構は、前記第1の比と前記第2の比とが同じものになるように前記電圧電極対の位置を調整することを特徴としている。
【0009】
・上記体組成測定装置において、前記調整機構は伸縮素材を含み、前記伸縮素材が変形することにより、前記電圧電極対の位置が調整されることが好ましい。
・上記体組成測定装置において、前記調整機構は、前記伸縮素材としてベルト状の形状記憶合金を備え、前記基準断面のうち、周囲の長さが大きい断面を前記第1の基準断面とし、周囲の長さが小さい断面を前記第2の基準断面としたときに、前記形状記憶合金に電流を印加することにより同形状記憶合金が変形して、この形状記憶合金を介して接続されている前記電圧電極対の位置が、前記第1の基準断面に対応する位置から前記第2の基準断面に対応する位置に変化することが好ましい。
【0010】
・上記体組成測定装置において、前記調整機構は、前記伸縮素材として電場応答性ポリマーを備え、前記基準断面のうち、周囲の長さが大きい断面を前記第1の基準断面とし、周囲の長さが小さい断面を前記第2の基準断面としたときに、前記電場応答性ポリマーに電圧を印加することにより同電場応答性ポリマーが縮んで、この電場応答性ポリマーを介して接続されている前記電圧電極対の位置が、前記第1の基準断面に対応する位置から前記第2の基準断面に対応する位置に変化することが好ましい。
【0011】
・上記体組成測定装置において、前記調整機構は、前記伸縮素材として伸縮性を有するチューブを備え、前記基準断面のうち、周囲の長さが大きい断面を前記第1の基準断面とし、周囲の長さが小さい断面を前記第2の基準断面としたときに、前記チューブ内に気体が注入されることにより同チューブが膨らんで、このチューブに設けられた前記電圧電極対の位置が、前記第1の基準断面に対応する位置から前記第2の基準断面に対応する位置に変化することが好ましい。
【0012】
・上記体組成測定装置において、前記調整機構は、基体と、この基体に支持されるとともに前記電圧電極対が設けられた伸縮可能な伸縮機構とを備え、前記伸縮機構が伸縮することにより、前記基体から前記電圧電極対までの距離が変化して前記電圧電極対の位置が調整され、前記伸縮機構は、前記第1の比と前記第2の比とが同じものになるように伸縮することが好ましい。
【0013】
・上記体組成測定装置において、前記電圧電極対の位置を検出するセンサを備えていることが好ましい。
・上記体組成測定装置において、腹囲を測定するためのセンサを備えていることが好ましい。
【0014】
・上記体組成測定装置において、前記調整機構は、前記電流電極対の位置を調整し、前記電流電極対が前記第1の基準断面の外周に対応する位置にあるときの、前記第1の基準断面の外周の長さに対する前記第1の電流電極と前記第2の電流電極との距離の比を第3の比とし、前記電流電極対が前記第2の基準断面の外周に対応する位置にあるときの、前記第2の基準断面の外周の長さに対する前記第1の電流電極と前記第2の電流電極との距離の比を第4の比としたときに、前記調整機構は、前記第3の比と前記第4の比とが同じものになるように前記電流電極対の位置を調整することが好ましい。
【発明の効果】
【0015】
本発明によれば、人体の所定部位の周囲の長さが測定対象者毎に異なる場合であっても、体組成を精度良く測定することのできる体組成測定装置を提供することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1実施形態の体組成測定装置の構成を示すブロック図。
【図2】同実施形態の体組成測定装置の使用態様を示す模式図。
【図3】同実施形態の体組成測定装置の外観を示す斜視図。
【図4】同実施形態の体組成測定装置を示す平面図と、接続体の構成を示す模式図。
【図5】同実施形態の体組成測定装置を示す平面図。
【図6】同実施形態の体組成測定装置が備える電極と人体との位置関係を模式的に示す模式図。
【図7】同実施形態の体組成測定装置が備える電極と人体との位置関係を模式的に示す模式図。
【図8】本発明の第2実施形態の体組成測定装置の外観を示す斜視図。
【図9】同実施形態の体組成測定装置を示す平面図。
【図10】本発明の第3実施形態の体組成測定装置の外観を示す斜視図。
【図11】同実施形態の体組成測定装置を示す平面図と、接続体の構成を示す模式図。
【図12】同実施形態の体組成測定装置を示す平面図。
【図13】本発明の第4実施形態の体組成測定装置を示す平面図と、接続体の構成を示す模式図。
【図14】本発明の第5実施形態の体組成測定装置の外観を示す斜視図。
【図15】同実施形態の体組成測定装置を示す平面図。
【図16】同実施形態の体組成測定装置を示す平面図。
【図17】本発明の第6実施形態の体組成測定装置の外観を示す斜視図。
【図18】同実施形態の体組成測定装置の外観を示す平面図。
【図19】同実施形態の体組成測定装置が備える伸縮機構を模式的に示す断面図。
【図20】同実施形態の体組成測定装置を示す平面図。
【図21】本発明の体組成測定装置の変形例を示す模式図。
【図22】本発明の体組成測定装置の変形例を示す平面図。
【図23】本発明の体組成測定装置の変形例について、(a)は体組成測定装置を示す斜視図、(b)は体組成測定装置が備える腹囲測定用メジャーを示す模式図。
【図24】本発明の体組成測定装置の変形例を示す模式図。
【図25】本発明の体組成測定装置の変形例を示す平面図。
【図26】本発明の体組成測定装置の変形例を示す平面図。
【図27】従来の体組成測定装置の使用態様を示す模式図。
【図28】従来の体組成測定装置の使用態様を示す模式図。
【発明を実施するための形態】
【0017】
(第1実施形態)
図1〜図7を参照して、本発明の第1実施形態について説明する。
図1に示すように、体組成測定装置1は、体組成の測定を行うための電極群2と、電極群2を用いた体組成の測定動作を制御する制御部11と、体組成の測定動作を操作するための操作部12と、体組成の測定結果を表示する表示部13とを備えている。
【0018】
電極群2は、複数の電極21,22,31〜34により構成されている。具体的には、電極群2は、電流を印加するための電流電極として、第1電流電極21と第2電流電極22を備えている。第1電流電極21と第2電流電極22とにより電流電極対20が構成されている。電流電極21,22の各々は、電極線を介して制御部11に接続されている。
【0019】
また、電極群2は、電圧を測定するための電圧電極として、第1電圧電極31と第2電圧電極32と第3電圧電極33と第4電圧電極34を備えている。第1電圧電極31と第2電圧電極32とにより第1電圧電極対30Aが構成され、第2電圧電極32と第3電圧電極33とにより第2電圧電極対30Bが構成され、第3電圧電極33と第4電圧電極34とにより第3電圧電極対30Cが構成されている。電圧電極31,32,33,34の各々は、電極線を介して制御部11に接続されている。
【0020】
制御部11は、例えばマイクロコンピュータにより構成された集積回路である。制御部11には、体脂肪の測定の開始を指示する信号や、腹囲を示す信号等が入力される。制御部11は、体脂肪の測定の開始を指示する信号が入力されたときに、体組成である体脂肪の測定を開始する。体脂肪の測定を開始するときに、制御部11は、電流電極対20による電流の印加を開始する。このようにして、電流電極21,22間に電流が流れる。そして、制御部11は、電圧電極対30A〜30Cを用いて電圧を測定する。すなわち、制御部11は、電圧電極31,32間、電圧電極32,33間、および電圧電極33,34間の電圧を測定する。また、制御部11は、上記電圧の測定結果に基づいて、体脂肪率と体脂肪分布を算出して、体脂肪を測定する。そして、体脂肪の測定結果を信号として表示部13に出力する。なお、制御部11は、腹囲を示す信号が入力されているときには、腹囲と上記電圧の測定結果に基づいて、体脂肪率と体脂肪分布を算出する。
【0021】
操作部12は、スイッチやボタン等により構成された入力用マンマシンインタフェースである。操作部12は、信号伝達線を介して制御部11に接続されている。操作部12が操作されることにより、体脂肪の測定の開始を指示する信号や、腹囲を示す信号が制御部11に入力される。
【0022】
表示部13は、例えば液晶パネルにより構成された出力用マンマシンインタフェースである。表示部13は、信号伝達線を介して制御部11に接続されている。表示部13は、制御部11から入力される体脂肪の測定結果を示す信号に基づいて、体脂肪の測定結果を表示する。
【0023】
図2に示すように、体脂肪測定装置である体組成測定装置1は、測定対象者の人体9において、人体9の所定部位である腹部91に当てて用いられる。すなわち、体組成測定装置1による体脂肪の測定対象部位は腹部91である。人体9に対する体組成測定装置1の位置の決定は、例えば腹部91における臍92を用いて行うことができる。
【0024】
図3および図4を参照しながら、腹部91に設けられる電極群2の配置等を説明する。
図3に示すように、体組成測定装置1は、本体部41と、電極21,22,31〜34を支持する電極支持部42A〜42Fとを備えている。
【0025】
本体部41には、操作部12および表示部13が設けられるともに、制御部11が内蔵されている。また、本体部41には、人体9の位置決め基準である臍92と位置合わせされる指標部14が設けられている。
【0026】
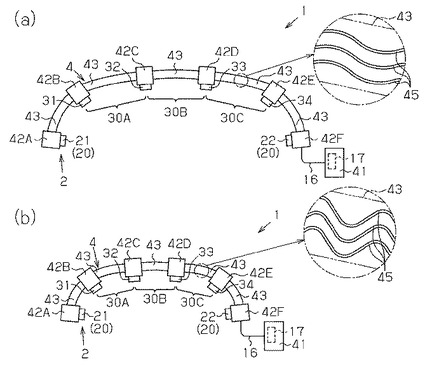
電極支持部42A〜42Fは、接続体43を用いて本体部41に接続されている。
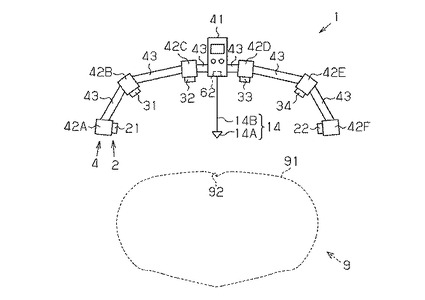
図4に示すように、第1電流電極21を支持する電極支持部42Aと、第1電圧電極31を支持する電極支持部42Bとが接続体43により接続されている。また、第1電圧電極31を支持する電極支持部42Bと、第2電圧電極32を支持する電極支持部42Cとが接続体43により接続されている。また、第2電流電極22を支持する電極支持部42Fと、第4電圧電極34を支持する電極支持部42Eとが接続体43により接続されている。また、第4電圧電極34を支持する電極支持部42Eと、第3電圧電極33を支持する電極支持部42Dとが接続体43により接続されている。そして、電極支持部42C,42Dの各々が接続体43により本体部41に接続されている。このような構成により、第1電流電極21、第1電圧電極31、第2電圧電極32、第3電圧電極33、第4電圧電極34、第2電流電極22の順番で整列するように電極群2が腹部91に設けられる。
【0027】
接続体43は、例えばシリンダにより構成されるとともに、ラック・ピニオン構造43Aを備えている。ラック・ピニオン構造43Aは、互いに噛み合うラック43Bとピニオン43Cとにより構成されている。ピニオン43Cが電気モータ43Dを駆動源として回転することにより、ラック43B上をピニオン43Cが移動する。このように、ラック・ピニオン構造43Aを備える接続体43は、伸縮可能な伸縮機構である。
【0028】
図4(a)および(b)に示すように、接続体43が伸縮することにより、電極支持部42A〜42Fに設けられた電流電極対20および電圧電極対30A〜30Cの位置関係が変化する。なお、このとき、電極21,22,31〜34のうち隣り合った3つの電極のなす4つの角度は一定である。すなわち、電極21,31,32のなす角度と、電極31,32,33のなす角度と、電極32,33,34のなす角度と、電極33,34,22のなす角度は変化しない。図4(a)は、接続体43が伸びた状態を示す図であって、図4(b)は、接続体43が縮んだ状態を示す図である。従って、本体部41と電極支持部42A〜42Fと接続体43とにより、電流電極対20および電圧電極対30A〜30Cの位置を調整する調整機構4が構成されている。
【0029】
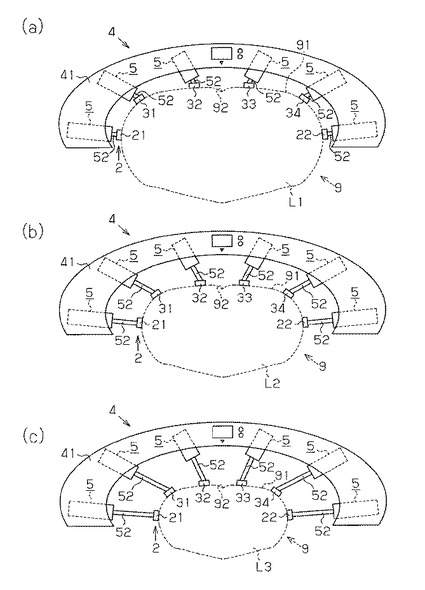
図5等を参照しながら、本実施形態の作用について説明する。図5において、破線によって囲まれる領域は、人体9の所定部位である腹部91を輪切りにしてモデル化したものである。本実施形態においては、図5において破線によって囲まれる領域を基準断面とする。
【0030】
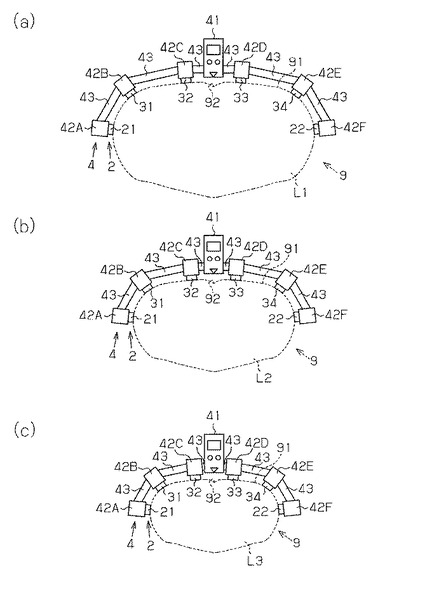
図5(a)に示す第1基準断面L1と、図5(b)に示す第2基準断面L2と、図5(c)に示す第3基準断面L3とは、周囲の長さが異なって互いに相似な形状である。調整機構4の接続体43が伸縮することにより、互いに相似する基準断面L1〜L3の各々に電極21,22,31〜34が接する。
【0031】
すなわち、図5(a)に示すように、第1基準断面L1の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図5(a)に示す状態から接続体43を縮めることにより、図5(b)に示すように、第1基準断面L1を縮小した形状である第2基準断面L2の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図5(b)に示す状態から接続体43をさらに縮めることにより、図5(c)に示すように、第2基準断面L2を縮小した形状である第3基準断面L3の外周に、電流電極対20および電圧電極対30A〜30Cが接する。
【0032】
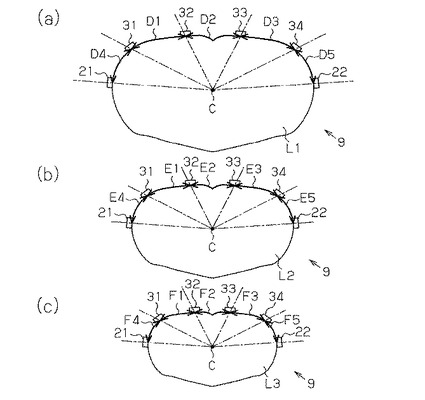
図6は、基準断面L1〜L3の中心Cを重ね合わせたときに、各基準断面L1〜L3に接する電極21,22,31〜34の位置を示す模式図である。図6に示すように、調整機構4によって位置が調整される電極21,22,31〜34の各々は、中心Cを通過する一点鎖線で示す直線上を変位する。図6における一点鎖線上を電極21,22,31〜34が変位するように、ピニオン43Cの歯数および電気モータ43Dの回転数が設定されるとともに、接続体43の各々が連動して伸縮するように構成されている。接続体43の伸縮は、操作部12が操作されることにより調整機構4を動作させる信号が制御部11に入力されたときに、制御部11が接続体43の各々に対応する電気モータ43Dを駆動させることにより行われる。
【0033】
以上のように電極21,22,31〜34の位置が調整されることによって、電極21,22,31〜34が接触する基準断面において、基準断面の外周の長さに対する電極間の比が保たれる。
【0034】
すなわち、図7に示すように、第1基準断面L1の外周の長さに対する電圧電極31,32間の距離D1の比と、第2基準断面L2の外周の長さに対する電圧電極31,32間の距離E1の比は同じである。さらに、第1基準断面L1の外周の長さに対する電圧電極31,32間の距離D1の比と、第3基準断面L3の外周の長さに対する電圧電極31,32間の距離F1の比も同じである。なお、距離D1,E1,F1は、基準断面の外周に沿った長さである。
【0035】
また、第1基準断面L1の外周の長さに対する電圧電極32,33間の距離D2の比と、第2基準断面L2の外周の長さに対する電圧電極32,33間の距離E2の比は同じである。さらに、第1基準断面L1の外周の長さに対する電圧電極32,33間の距離D2の比と、第3基準断面L3の外周の長さに対する電圧電極32,33間の距離F2の比も同じである。なお、距離D2,E2,F2は、基準断面の外周に沿った長さである。
【0036】
また、第1基準断面L1の外周の長さに対する電圧電極33,34間の距離D3の比と、第2基準断面L2の外周の長さに対する電圧電極33,34間の距離E3の比は同じである。さらに、第1基準断面L1の外周の長さに対する電圧電極33,34間の距離D3の比と、第3基準断面L3の外周の長さに対する電圧電極33,34間の距離F3の比も同じである。なお、距離D3,E3,F3は、基準断面の外周に沿った長さである。
【0037】
また、第1基準断面L1の外周の長さに対する第1電流電極21と第1電圧電極31の間の距離D4の比と、第2基準断面L2の外周の長さに対する第1電流電極21と第1電圧電極31の間の距離E4の比は同じである。さらに、第1基準断面L1の外周の長さに対する第1電流電極21と第1電圧電極31の間の距離D4の比と、第3基準断面L3の外周の長さに対する第1電流電極21と第1電圧電極31の間の距離F4の比は同じである。なお、距離D4,E4,F4は、基準断面の外周に沿った長さである。
【0038】
また、第1基準断面L1の外周の長さに対する第4電圧電極34と第2電流電極22の間の距離D5の比と、第2基準断面L2の外周の長さに対する第4電圧電極34と第2電流電極22の間の距離E5の比は同じである。さらに、第1基準断面L1の外周の長さに対する第4電圧電極34と第2電流電極22の間の距離D4の比と、第3基準断面L3の外周の長さに対する第4電圧電極34と第2電流電極22の間の距離F5の比は同じである。なお、距離D5,E5,F5は、基準断面の外周に沿った長さである。
【0039】
従って、換言すれば、「距離D4:距離D1:距離D2:距離D3:距離D5」の比と、「距離E4:距離E1:距離E2:距離E3:距離E5」の比と、「距離F4:距離F1:距離F2:距離F3:距離F5」の比とは同じである。すなわち、電流電極21,22および電圧電極31〜34のうち隣り合った電極間の距離の比率は一定である。
【0040】
よって、電圧電極31〜34のうち隣り合った電圧電極間の距離の比率は一定であって、電圧電極31〜34が接する基準断面において、基準断面の外周の長さに対する第1電圧電極31から第4電圧電極34までの距離の比は一定である。すなわち、例えば、第1基準断面L1の外周の長さに対する電圧電極31,34間の距離(すなわち、距離D1〜D3の和)の比と、第2基準断面L2の外周の長さに対する電圧電極31,34間の距離(すなわち、距離E1〜E3の和)の比が同じである。換言すれば、電圧電極31〜34が接する基準断面において、基準断面の外周の長さに対する第1電圧電極31から第4電圧電極34までの距離の比は一定である。
【0041】
また、電流電極21,22が接する基準断面において、基準断面の外周の長さに対する第1電流電極21から第2電流電極22までの距離の比も一定である。すなわち、例えば、第1基準断面L1の外周の長さに対する電流電極21,22間の距離(すなわち、距離D1〜D5の和)の比と、第2基準断面L2の外周の長さに対する電流電極21,22間の距離(すなわち、距離E1〜E5の和)の比が同じである。
【0042】
なお、基準断面を含む平面において、電極21,22,31〜34のうち隣り合った電極の間隔(すなわち、電極間の距離)の比率を上述のごとく一定となるときには、電極21,22,31〜34について隣り合った3つの電極がなす4つの角度も定められる。しかし、基準断面L1〜L3の外周に対応する位置に設けられる電極21,22,31〜34は、人体9の表面に接触する位置に必然的に設けられる。このように基準断面L1〜L3の外周に対応する位置に電極21,22,31〜34が設けられたときには、電極21,22,31〜34について隣り合った3つの電極のなす角度が定まる。よって、電極21,22,31〜34が基準断面に接していないときに隣り合った電極のなす角度は、電極21,22,31〜34が基準断面に接しているときには隣り合った電極のなす角度と異なったものであってもよい。従って、例えば、本体部41および電極支持部42A〜42Fの各々に対して、接続体43が回動可能に接続されていてもよい。
【0043】
以上のように、測定対象者の腹囲に応じて電圧電極対30A〜30Cを用いて測定する電圧の測定対象範囲を変化させることができ、腹部91の大きさに応じた体脂肪の測定を行うことができる。なお、体脂肪の測定は、電圧電極対30A〜30Cのうち少なくとも1つの電圧電極対を用いて行われればよい。
【0044】
本実施形態によれば、以下の効果を奏することができる。
(1)第1電圧電極対30Aが第1基準断面L1の外周に対応する位置にあるときの、第1基準断面L1の外周の長さに対する電圧電極31,32間の距離D1の比を第1の比とする。また、電圧電極対30Aが第2基準断面L2の外周に対応する位置にあるときの、第2基準断面L2の外周の長さに対する電圧電極31,32間の距離E1の比を第2の比とする。本実施形態においては、体組成測定装置1は、第1の比と第2の比が同じものとなるように第1電圧電極対30Aの位置を調整する調整機構4を備えている。このため、調整機構4により、腹囲が大きい測定対象者であっても小さい測定対象者であっても、測定対象者の腹囲の全周に対する第1電圧電極31と第2電圧電極32との間の距離の比が同じものとなる。すなわち、測定対象者の腹囲の全周に対する第1電圧電極31と第2電圧電極32との間の距離の比が保たれる。従って、人体の所定部位の周囲の長さである腹囲の長さが測定対象者毎に異なる場合であっても、第1電圧電極対30Aを用いて体組成を精度良く測定することができる。
【0045】
また、調整機構4は、第1電圧電極対30Aと同様にして、電圧電極対30B,30Cの位置を調整する。このため、上記(1)と同様に、測定対象者の腹囲の全周に対する第2電圧電極32と第3電圧電極33との間の距離の比、および測定対象者の腹囲の全周に対する第3電圧電極33と第4電圧電極34との間の距離の比が保たれる。従って、腹囲の長さが測定対象者毎に異なる場合であっても、電圧電極対30B,30Cを用いて体組成を精度良く測定することができる。
【0046】
(2)電流電極対20が第1基準断面L1の外周に対応する位置にあるときの、第1基準断面L1の外周の長さに対する電流電極21,22間の距離の比を第3の比とする。また、電流電極対20が第2基準断面L2の外周に対応する位置にあるときの、第2基準断面L2の外周の長さに対する電流電極21,22間の距離の比を第4の比とする。本実施形態においては、調整機構4は、第3の比と第4の比とが同じものになるように電流電極対20の位置を調整する。このため、調整機構4により電圧電極対30A〜30Cの位置だけでなく電流電極対20の位置も調整される。従って、調整機構4とは別個の機構によって電流電極対20を適切な位置に設ける必要がなくなる。
【0047】
(3)第1電圧電極対30Aが第3基準断面L3の外周に対応する位置にあるときの、第3基準断面L3の外周の長さに対する電圧電極31,32間の距離F1の比を第5の比とする。本実施形態においては、調整機構4は、第1の比と第2の比と第5の比が同じものとなるように第1電圧電極対30Aの位置を調整する。従って、3つの基準断面L1〜L3において、測定対象者の腹囲の全周に対する電圧電極31,32間の比が同じものとなる。よって、2つの基準断面においてのみ腹囲の全周に対する電圧電極31,32間の距離の比が同じとなる場合に比べて、測定対象者の腹囲の全周に対する電圧電極31,32間の距離の比が確実に保たれる。
【0048】
また、調整機構4は、第1電圧電極対30Aと同様にして、第2電圧電極対30Bの位置を調整する。このため、上記(3)と同様に、3つの基準断面L1〜L3において、測定対象者の腹囲の全周に対する電圧電極32,33間の距離の比が同じものとなる。よって、2つの基準断面において腹囲の全周に対する電圧電極32,33間の距離の比が同じとなる場合に比べて、測定対象者の腹囲の全周に対する電圧電極32,33間の距離の比が確実に保たれる。また、調整機構4は、電圧電極対30A,30Bと同様にして、第3電圧電極対30Cの位置を調整する。このため、上記(3)と同様に、3つの基準断面L1〜L3において、測定対象者の腹囲の全周に対する電圧電極33,34間の距離の比が同じものとなる。よって、2つの基準断面において腹囲の全周に対する電圧電極33,34間の距離の比が同じとなる場合に比べて、測定対象者の腹囲の全周に対する電圧電極33,34間の距離の比が確実に保たれる。また、調整機構4は、電圧電極対30A〜30Cと同様にして、電流電極対20の位置を調整する。このため、上記(3)と同様に、3つの基準断面L1〜L3において、測定対象者の腹囲の全周に対する電流電極21,22間の距離の比が同じものとなる。
【0049】
(第2実施形態)
図8および図9を参照して、本発明の第2実施形態について説明する。なお、第1実施形態と同様の構成については、同一の符号を付してその説明を省略または簡略化する。
【0050】
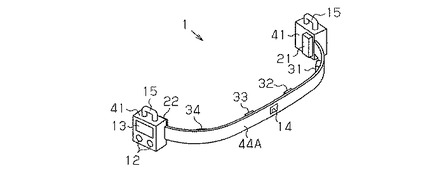
図8に示すように、本実施形態の体組成測定装置1は、ベルト固定部である2つの本体部41と、2つの本体部41を接続する伸縮ベルト44Aとを備えている。すなわち、伸縮ベルト44Aの両端には、それぞれ本体部41が設けられている。
【0051】
伸縮ベルト44Aの端部が固定された本体部41には、測定対象者が把持するための取っ手である把持部15が設けられている。また、2つの本体部41のうち少なくとも一方の本体部41に、操作部12および表示部13が設けられるともに、制御部11が内蔵されている。
【0052】
伸縮性を有する伸縮ベルト44Aは、伸縮材料により構成されている。伸縮ベルト44Aを構成する伸縮材料としては、例えばベルト状のゴム引布を用いることができる。伸縮ベルト44Aの中央には、人体9の位置決め基準である臍92と位置合わせされる指標部14が設けられている。本実施形態の指標部14は伸縮ベルト44Aに形成された穴により構成されている。
【0053】
図9に示すように、伸縮ベルト44Aには、第1電流電極21、第1電圧電極31、第2電圧電極32、第3電圧電極33、第4電圧電極34、第2電流電極22の順番で整列するように電極群2が設けられている。
【0054】
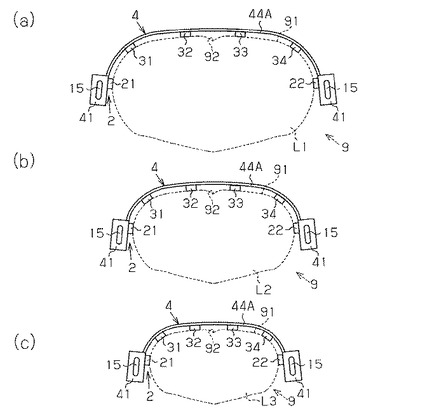
図9(a)〜(c)に示すように、伸縮ベルト44Aが伸縮することにより、伸縮ベルト44Aに設けられた電流電極対20および電圧電極対30A〜30Cの位置関係が変化する。図9において、破線によって囲まれる領域は、上記第1実施形態と同様に、人体9の所定部位である腹部91を輪切りにしてモデル化した基準断面である。
【0055】
調整機構4の伸縮ベルト44Aが伸縮することにより、互いに相似する基準断面L1〜L3の各々に電極21,22,31〜34が接する。すなわち、図9(a)に示すように、第1基準断面L1の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図9(a)に示す状態から伸縮ベルト44Aを縮めることにより、図9(b)に示すように、第1基準断面L1を縮小した形状である第2基準断面L2の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図9(b)に示す状態から伸縮ベルト44Aをさらに縮めることにより、図9(c)に示すように、第2基準断面L2を縮小した形状である第3基準断面L3の外周に、電流電極対20および電圧電極対30A〜30Cが接する。
【0056】
本実施形態においても調整機構4によって位置が調整される電極21,22,31〜34の各々は、基準断面L1〜L3の中心C(図6参照)を通過する一点鎖線で示す直線上を変位する。以上のように電極21,22,31〜34の位置が調整されることによって、上記第1実施形態と同様に、電極21,22,31〜34が接触する基準断面において、基準断面の外周の長さに対する電極間の比が保たれる。
【0057】
本実施形態によれば、上記第1実施形態の(1)〜(3)に記載の効果に加えて、以下の効果を奏することができる。
(4)調整機構4は、伸縮素材である伸縮ベルト44Aを含み、伸縮ベルト44Aが変形、すなわち伸縮することにより、電極対20,30A〜30Cの位置が調整される。このため、伸縮ベルト44Aを変形させることにより、測定対象者の腹囲の全周に対する電圧電極31,32間の距離の比が同じものとなる。また、同様に、測定対象者の腹囲の全周に対する電圧電極32,33間の距離の比が同じものとなり、測定対象者の腹囲の全周に対する電圧電極33,34間の距離の比が同じものとなる。また、同様に、測定対象者の腹囲の全周に対する電流電極21,22間の距離の比が同じものとなる。
【0058】
(第3実施形態)
図10〜図12を参照して、本発明の第3実施形態について説明する。なお、第1実施形態と同様の構成については、同一の符号を付してその説明を省略または簡略化する。
【0059】
図10に示すように、本実施形態の体組成測定装置1は、接続体43に接続されていない本体部41を備えている。本体部41は、コード16を介して電極支持部42Fに接続されている。なお、本実施形態においては、人体9の位置決め基準と位置合わせされる指標部の図示は省略されている。
【0060】
電極支持部42A〜42Fは、接続体43を用いて直列に接続されている。
図11に示すように、第2電圧電極32を支持する電極支持部42Cと、第3電圧電極33を支持する電極支持部42Dとが、接続体43により本体部41を介さずに接続されている。
【0061】
本実施形態の接続体43は、ベルト状の形状記憶合金45を備えている。形状記憶合金45は、通電に起因して発生する熱により、記憶された形状に変形する特性を有している。従って、波打った形状を記憶している形状記憶合金45を伸ばした後に、形状記憶合金45に通電を行ったときには、形状記憶合金45は波打った形状に戻るように形状記憶合金45の全体が縮む変形材料である。
【0062】
図11(a)および(b)に示すように、接続体43の形状記憶合金45に電流が印加されることにより、電極支持部42A〜42Fに設けられた電流電極対20および電圧電極対30A〜30Cの位置関係が変化する。図11(a)は、形状記憶合金45に電流が印加される前の状態を示す図であって、図11(b)は、形状記憶合金45に電流が印加された後の状態を示す図である。形状記憶合金45に対する電流の印加は、例えばコード16を介して本体部41に設けられた電流印加部17が行う。従って、電流印加部17を含む本体部41と電極支持部42A〜42Fと接続体43とにより、電流電極対20および電圧電極対30A〜30Cの位置を調整する調整機構4が構成されている。
【0063】
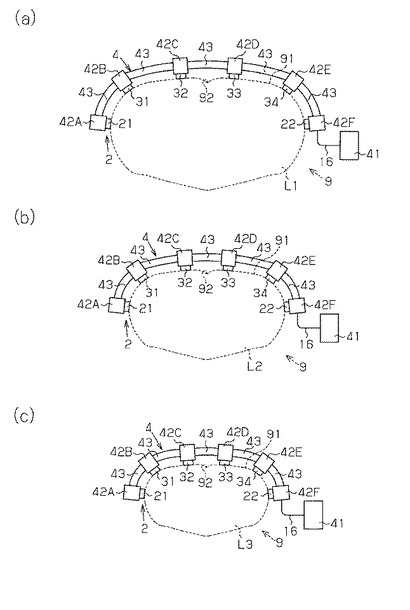
図12を参照しながら、本実施形態の作用について説明する。図12において、破線によって囲まれる領域は、上記第1実施形態と同様に、人体9の所定部位である腹部91を輪切りにしてモデル化した基準断面である。
【0064】
調整機構4の形状記憶合金45が変形することにより、互いに相似する基準断面L1〜L3の各々に電極21,22,31〜34が接する。すなわち、図12(a)に示すように、第1基準断面L1の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図12(a)に示す状態から形状記憶合金45に所定量の電流を印加することにより、図12(b)に示すように、第1基準断面L1を縮小した形状である第2基準断面L2の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図12(b)に示す状態から形状記憶合金45にさらに大きな電流を印加することにより、図12(c)に示すように、第2基準断面L2を縮小した形状である第3基準断面L3の外周に、電流電極対20および電圧電極対30A〜30Cが接する。
【0065】
本実施形態においても調整機構4によって位置が調整される電極21,22,31〜34の各々は、基準断面L1〜L3の中心C(図6参照)を通過する一点鎖線で示す直線上を変位する。以上のように電極21,22,31〜34の位置が調整されることによって、上記第1および第2実施形態と同様に、電極21,22,31〜34が接触する基準断面において、基準断面の外周の長さに対する電極間の比が保たれる。
【0066】
なお、形状記憶合金45は熱により変形度合いが変化する変形材料である。従って、記憶された形状に変形する過程における形状記憶合金45の形状を維持するためには、例えば、形状記憶合金45に生じた温度を検出する温度センサ(図示略)の検出結果に基づいて、形状記憶合金45への電流の印加が制御されることが好ましい。
【0067】
本実施形態によれば、上記第1実施形態の(1)〜(3)に記載の効果に加えて、以下の効果を奏することができる。
(5)調整機構4は、伸縮素材である形状記憶合金45を含み、形状記憶合金45が変形することにより、電極対20,30A〜30Cの位置が調整される。このため、上記(4)に準じた効果を得ることができる。
【0068】
(6)調整機構4は、ベルト状の形状記憶合金45を備えている。この形状記憶合金45に電流を印加することにより形状記憶合金45が変形して、形状記憶合金45を介して接続されている電極対20,30A〜30Cの位置が、第1基準断面L1に対応する位置から第2基準断面L2に対応する位置に変化する。また、形状記憶合金45に電流をさらに印加することにより形状記憶合金45が変形して、電極対20,30A〜30Cが、第2基準断面L2に対応する位置から第3基準断面L3に対応する位置に変化する。このため、形状記憶合金45に電流を印加することにより、電流電極対20および電圧電極対30A〜30Cの位置を調整することができる。
【0069】
(第4実施形態)
図13を参照して、本発明の第4実施形態について説明する。なお、第1および第3実施形態と同様の構成については、同一の符号を付してその説明を省略または簡略化する。
【0070】
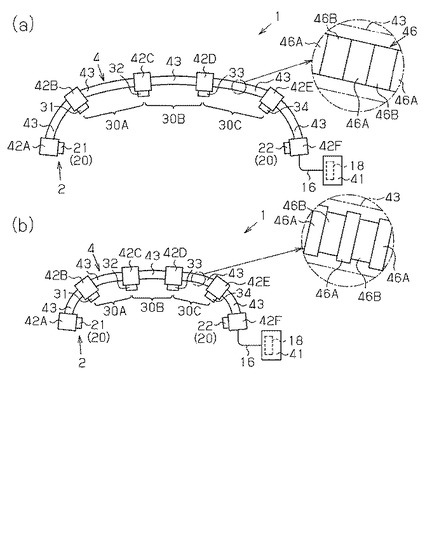
図13に示すように、本実施形態の体組成測定装置1は、上記第3実施形態と同様に、接続体43に接続されていない本体部41を備えている。
本実施形態の接続体43は、EPAM(Electroactive Polymer Artificial Muscle)46を備えている。EPAM46は、変形材料として電場応答性ポリマー46Aと、電場応答性ポリマー46Aを挟む電極46Bとにより構成されたアクチュエータである。電場応答性ポリマー46Aは、ゴム状の薄い電場応答性高分子膜であって、電場応答性ポリマー46Aに電圧が印加されると、伸縮材料である電場応答性ポリマー46Aは、印加された電圧に応じて電極46B間の距離が短くなるように伸展する特性を有している。
【0071】
図13(a)および(b)に示すように、接続体43の電場応答性ポリマー46Aに電極46Bを用いて電圧が印加されることにより、電極支持部42A〜42Fに設けられた電流電極対20および電圧電極対30A〜30Cの位置関係が変化する。図13(a)は、電場応答性ポリマー46Aに電圧が印加される前の状態を示す図であって、図13(b)は、電場応答性ポリマー46Aに電圧が印加されている状態を示す図である。電極46Bを用いた電場応答性ポリマー46Aに対する電圧の印加は、例えばコード16を介して本体部41に設けられた電圧印加部18が行う。従って、電圧印加部18を含む本体部41と電極支持部42A〜42Fと接続体43とにより、電流電極対20および電圧電極対30A〜30Cの位置を調整する調整機構4が構成されている。
【0072】
本実施形態の作用は、上記第3実施形態において図12を参照しながら説明した作用に準じたものである。
すなわち、調整機構4の電場応答性ポリマー46Aが変形することにより、図12に示した互いに相似する基準断面L1〜L3の各々に電極21,22,31〜34が接する。すなわち、図12(a)に示すように、第1基準断面L1の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図12(a)に示す状態から電場応答性ポリマー46Aに所定の電圧を印加することにより、図12(b)に示すように、第1基準断面L1を縮小した形状である第2基準断面L2の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図12(b)に示す状態から電場応答性ポリマー46Aにさらに大きな電圧を印加することにより、図12(c)に示すように、第2基準断面L2を縮小した形状である第3基準断面L3の外周に、電流電極対20および電圧電極対30A〜30Cが接する。
【0073】
本実施形態においても調整機構4によって位置が調整される電極21,22,31〜34の各々は、基準断面L1〜L3の中心C(図6参照)を通過する一点鎖線で示す直線上を変位する。以上のように電極21,22,31〜34の位置が調整されることによって、上記第1〜第3実施形態と同様に、電極21,22,31〜34が接触する基準断面において、基準断面の外周の長さに対する電極間の比が保たれる。
【0074】
本実施形態によれば、第1実施形態の(1)〜(3)に記載の効果に加えて、以下の効果を奏することができる。
(7)調整機構4は、伸縮素材である電場応答性ポリマー46Aを含み、電場応答性ポリマー46Aが変形することにより、電流電極対20および電圧電極対30A〜30Cの位置が調整される。このため、上記(4)に準じた効果を得ることができる。
【0075】
(8)調整機構4は、電場応答性ポリマー46Aを備えている。この電場応答性ポリマー46Aに電圧を印加することにより同ポリマー46Aが縮んで、電場応答性ポリマー46Aを介して接続されている電極対20,30A〜30Cの位置が、第1基準断面L1に対応する位置から第2基準断面L2に対応する位置に変化する。また、電場応答性ポリマー46Aに電圧をさらに印加することにより電場応答性ポリマー46Aが縮んで、電極対20,30A〜30Cの位置が、第2基準断面L2に対応する位置から第3基準断面L3に対応する位置に変化する。このため、電場応答性ポリマー46Aに電圧を印加することにより、電流電極対20および電圧電極対30A〜30Cの位置を調整することができる。
【0076】
(第5実施形態)
図14〜図16を参照して、本発明の第5実施形態について説明する。なお、第1実施形態と同様の構成については、同一の符号を付してその説明を省略または簡略化する。
【0077】
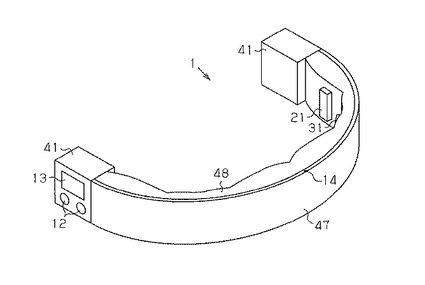
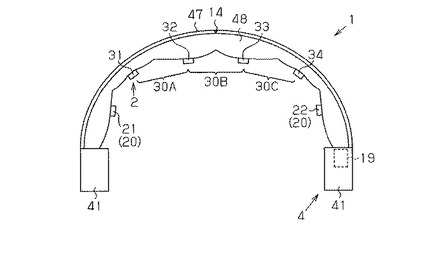
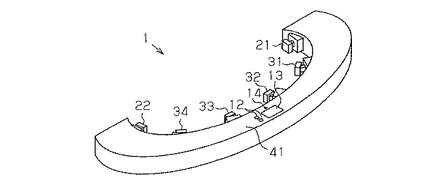
図14に示すように、本実施形態の体組成測定装置1は、上記第2実施形態と同様に、2つの本体部41を備えている。そして、体組成測定装置1は、2つの本体部41を接続する湾曲形状の基体47と、基体47の湾曲内側表面に設けられた伸縮性を有するチューブ48とを備えている。2つの本体部41のうち少なくとも一方の本体部41に、操作部12および表示部13が設けられるともに、制御部11が内蔵されている。また、基体47の中央には、人体9の位置決め基準である臍92と位置合わせされる指標部14が設けられている。
【0078】
中空形状のチューブ48は、伸縮材料により構成されている。チューブ48を構成する伸縮材料としては、例えば弾性を有するシリコンゴムを用いることができる。図15に示すように、チューブ48には、第1電流電極21、第1電圧電極31、第2電圧電極32、第3電圧電極33、第4電圧電極34、第2電流電極22の順番で整列するように電極群2が設けられている。
【0079】
チューブ48に空気が注入されることにより、チューブ48に設けられた電流電極対20および電圧電極対30A〜30Cの位置関係が変化する。チューブ48への空気の注入は、例えば本体部41に設けられたエア調整ポンプ19が行う。従って、エア調整ポンプ19を含む本体部41と基体47とチューブ48とにより、電流電極対20および電圧電極対30A〜30Cの位置を調整する調整機構4が構成されている。
【0080】
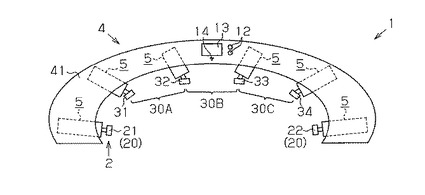
図16を参照しながら、本実施形態の作用について説明する。図16において、破線によって囲まれる領域は、上記第1実施形態と同様に、人体9の所定部位である腹部91を輪切りにしてモデル化した基準断面である。
【0081】
調整機構4のチューブ48が膨張又は収縮することにより、互いに相似する基準断面L1〜L3の各々に電極21,22,31〜34が接する。すなわち、図16(a)に示すように、第1基準断面L1の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図16(a)に示す状態からチューブ48に所定量の空気が注入されることにより、図16(b)に示すように、第1基準断面L1を縮小した形状である第2基準断面L2の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図16(b)に示す状態からチューブ48にさらに空気が注入されることにより、図16(c)に示すように、第2基準断面L2を縮小した形状である第3基準断面L3の外周に、電流電極対20および電圧電極対30A〜30Cが接する。
【0082】
本実施形態においても調整機構4によって位置が調整される電極21,22,31〜34の各々は、基準断面L1〜L3の中心C(図6参照)を通過する一点鎖線で示す直線上を変位する。以上のように電極21,22,31〜34の位置が調整されることによって、上記第1および第2実施形態と同様に、電極21,22,31〜34が接触する基準断面において、基準断面の外周の長さに対する電極間の比が保たれる。
【0083】
なお、チューブ48への空気の注入による電極21,22,31〜34の各々の変位量は、チューブ48内に形成される内部空間の形状により異ならせることができる。また、チューブ48を複数に分割して、各チューブ48への空気注入量を異ならせたり、各チューブ48の弾性を異ならせたりしてもよい。
【0084】
本実施形態によれば、第1実施形態の(1)〜(3)に記載の効果に加えて、以下の効果を奏することができる。
(9)調整機構4は、伸縮素材であるチューブ48を含み、チューブ48が変形することにより、電流電極対20および電圧電極対30A〜30Cの位置が調整される。このため、上記(4)に準じた効果を得ることができる。
【0085】
(10)調整機構4は、伸縮性を有するチューブ48を備えている。このチューブ48内に気体が注入されることにより同チューブ48が膨らんで、チューブ48に設けられた電極対20,30A〜30Cの位置が、第1基準断面L1に対応する位置から第2基準断面L2に対応する位置に変化する。また、チューブ48内に気体をさらに注入することによりチューブ48が膨らんで、電極対20,30A〜30Cの位置が、第2基準断面L2に対応する位置から第3基準断面L3に対応する位置に変化する。このため、チューブ48内に気体を注入することにより、電流電極対20および電圧電極対30A〜30Cの位置を調整することができる。
【0086】
(第6実施形態)
図17〜図19を参照して、本発明の第6実施形態について説明する。なお、第1実施形態と同様の構成については、同一の符号を付してその説明を省略または簡略化する。
【0087】
図17に示すように、本実施形態の体組成測定装置1は、湾曲した形状の本体部41を備えている。本体部41には、操作部12および表示部13が設けられるともに、制御部11が内蔵されている。また本体部41の中央には、人体9の位置決め基準である臍92と位置合わせされる指標部14が設けられている。
【0088】
図18に示すように、本体部41には、基体としての本体部41に支持されている伸縮機構5が設けられている。伸縮機構5には、電流電極21,22および電圧電極31〜34が設けられている。
【0089】
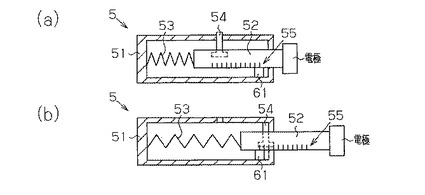
図19(a)に示すように、伸縮機構5は、本体部41に固定される固定部51に対して伸縮する棒状の伸縮部材52を備えている。固定部51と伸縮部材52との間には、伸縮部材52を付勢する弾性体53が設けられている。図19(b)に示すように、伸縮部材52が弾性体53で付勢されることにより、伸縮部材52が本体部41および固定部51から突き出て、伸縮部材52に設けられた電流電極対20および電圧電極対30A〜30Cの位置関係が変化する。従って、伸縮機構5を含む本体部41により、電流電極対20および電圧電極対30A〜30Cの位置を調整する調整機構4が構成されている。
【0090】
なお、伸縮部材52にはストッパ54が設けられている。このストッパ54が、固定部51に対して係止されていることにより伸縮部材52の移動が規制されている。従って、例えば操作部12が操作されて、ストッパ54による伸縮部材52の移動規制が解除されることにより、伸縮部材52が固定部51から突き出る。
【0091】
また、伸縮機構5には、本体部41から電圧電極対30Aである電圧電極31,32までの距離の変化を検出する光センサ61が設けられている。光センサ61は、伸縮部材52に設けられている光センサ用目印55を読み取ることにより、固定部51からの伸縮部材52の突出量を検出する。制御部11は、伸縮部材52の突出量の検出結果に基づいて、測定対象者の腹囲を算出する。
【0092】
図20を参照しながら、本実施形態の作用について説明する。図20において、破線によって囲まれる領域は、上記第1実施形態と同様に、人体9の所定部位である腹部91を輪切りにしてモデル化した基準断面である。
【0093】
調整機構4の伸縮部材52が伸縮することにより、互いに相似する基準断面L1〜L3の各々に電極21,22,31〜34が接する。すなわち、図20(a)に示すように、第1基準断面L1の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図20(a)に示す状態から伸縮部材52が伸びることにより、図20(b)に示すように、第1基準断面L1を縮小した形状である第2基準断面L2の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図20(b)に示す状態から伸縮部材52がさらに伸びることにより、図20(c)に示すように、第2基準断面L2を縮小した形状である第3基準断面L3の外周に、電流電極対20および電圧電極対30A〜30Cが接する。
【0094】
本実施形態においても調整機構4によって位置が調整される電極21,22,31〜34の各々は、基準断面L1〜L3の中心C(図6参照)を通過する一点鎖線で示す直線上を変位する。以上のように電極21,22,31〜34の位置が調整されることによって、上記第1実施形態と同様に、電極21,22,31〜34が接触する基準断面において、基準断面の外周の長さに対する電極間の比が保たれる。
【0095】
本実施形態によれば、第1実施形態の(1)〜(3)に記載の効果に加えて、以下の効果を奏することができる。
(13)第1電圧電極対30Aが設けられた伸縮機構5は、上記第1の比と上記第2の比とが同じものになるように伸縮する。このため、基体である本体部41から第1電圧電極対30Aまでの距離を伸縮機構5で調整することにより、測定対象者の腹囲の全周に対する電圧電極31,32間の距離の比が同じものとなる。
【0096】
また、第2電圧電極対30Bが設けられた伸縮機構5も、第1電圧電極対30Aが設けられた伸縮機構5と同様に伸縮する。このため、基体である本体部41から第2電圧電極対30Bまでの距離を伸縮機構5で調整することにより、測定対象者の腹囲の全周に対する電圧電極32,33間の距離の比が同じものとなる。また、第3電圧電極対30Cが設けられた伸縮機構5も、電圧電極対30A,30Bが設けられた伸縮機構5と同様に伸縮する。このため、基体である本体部41から第3電圧電極対30Cまでの距離を伸縮機構5で調整することにより、測定対象者の腹囲の全周に対する電圧電極33,34間の距離の比が同じものとなる。また、電流電極対20が設けられた伸縮機構5も、電圧電極対30A〜30Cが設けられた伸縮機構5と同様に伸縮する。このため、基体である本体部41から電流電極対20までの距離を伸縮機構5で調整することにより、測定対象者の腹囲の全周に対する電流電極21,22間の距離の比が同じものとなる。
【0097】
(14)体組成測定装置1は、電極対20,30A〜30Cの位置を検出する光センサ61を備えている。このため、光センサ61の検出結果に基づいて腹囲の測定を行うことができる。
【0098】
(15)体組成測定装置1は、腹囲を測定するためのセンサとして光センサ61を備えている。このため、測定対象者が腹囲の情報を体組成測定装置1に入力しない場合であっても、光センサ61による測定対象者の腹囲の測定結果に基づいて体組成を精度良く測定することができる。
【0099】
(その他の実施形態)
なお、本発明の実施態様は上記各実施形態に限られるものではなく、例えば以下に示すように変更することもできる。また以下の変形例は、上記各実施形態についてのみ適用されるものではなく、異なる変形例同士を互いに組み合わせて実施してもよい。
【0100】
・上記第1実施形態において、接続体43は、ラック・ピニオン構造43Aを備えるものに限定されない。すなわち、接続体43が伸縮可能な伸縮機構として構成されるのであれば、例えば油圧シリンダまたは空気圧シリンダにより接続体43が構成されてもよい。
【0101】
・上記第1、第3、および第4実施形態において、接続体43は、シリンダ以外のものにより構成されていてもよい。例えば蛇腹状の筒部材により構成されていてもよい。また、上記第3および第4実施形態における接続体43は、形状記憶合金45またはEPAM46を収める筒部材が省かれた構成であってもよい。
【0102】
・仰臥位の測定対象者の体脂肪を体組成測定装置1により測定してもよい。この場合には、例えば図21に示すように、体組成測定装置1が、紐14Bで吊り下げられた錘14Aにより構成された指標部14を備えていてもよい。また、体組成測定装置1が、紐14Bの張力を検出する力センサ62を備え、力センサ62による張力検出結果に基づいて、腹囲の測定が行われてもよい。
【0103】
・体組成測定装置1は、基準断面の全周を覆う構成であってもよい。例えば図22に示すように、上記第2実施形態の2つの本体部41に、伸縮ベルト44Aと同様に伸縮材料により構成された伸縮ベルト44Bが設けられて、伸縮ベルト44A,44Bが環状に構成されていてもよい。この場合に、図22に示すように、他の電極71〜76を、電圧電極31〜34と同様に、伸縮ベルト44Bに設けてもよい。
【0104】
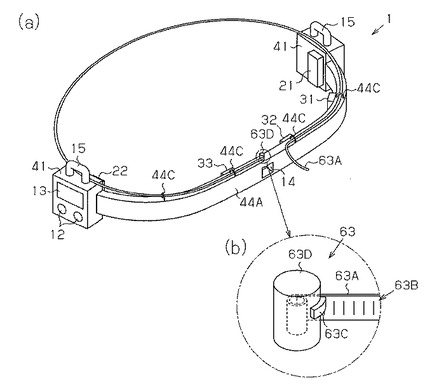
・上記第1〜5実施形態において、体組成測定装置1が、上記第6実施形態と同様に、電流電極対20および電圧電極対30A,30B,30Cが接する基準断面の外周の長さを測定するためのセンサを備えていてもよい。例えば図23に示すように、上記第2実施形態の伸縮ベルト44Aに、光センサ63Cを含む腹囲測定用メジャー63が設けられていてもよい。
【0105】
腹囲測定用メジャー63は、腹部91に巻かれる紐63Aと、紐63Aに設けられた光センサ用目印63Bを読み取る光センサ63Cと、紐63Aを巻き取る巻き取り機構63Dとにより構成されている。光センサ63Cは、光センサ用目印63Bを読み取ることにより、測定対象者の腹囲に巻かれた紐63Aの長さを検出することができる。制御部11は、光センサ63Cによる紐63Aの長さの検出結果に基づいて、測定対象者の腹囲を算出する。この場合、伸縮ベルト44Aに沿って紐63Aが腹囲に確実に巻かれるように、紐63Aを留める紐留め具44Cが伸縮ベルト44Aに設けられていることが好ましい。
【0106】
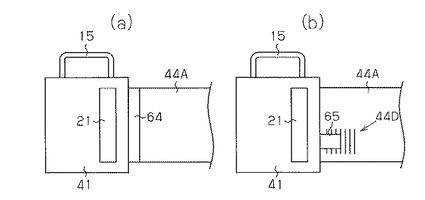
また、例えば図24(a)に示すように、上記第2実施形態の伸縮ベルト44Aに、伸縮ベルト44Aの張力を検出する力センサ64が設けて、この力センサ64による張力検出結果に基づいて、腹囲の測定が行われてもよい。
【0107】
また、例えば図24(b)に示すように、上記第2実施形態の伸縮ベルト44Aに光センサ用目印44Dを設けて、体組成測定装置1が光センサ用目印44Dを読み取る光センサ65を備える構成であってもよい。光センサ65は、光センサ用目印44Dを読み取ることにより、伸縮ベルト44Aの伸縮量を検出することができ、光センサ65による伸縮量検出結果に基づいて、腹囲の測定が行われてもよい。
【0108】
また、例えば上記第3実施形態において、形状記憶合金45に印加される電流量を検出するセンサ(図示略)を設けたり、形状記憶合金45の温度を検出するセンサを設けたりしてもよい。形状記憶合金45に印加される電流量および形状記憶合金45の温度は、形状記憶合金45の変形度合いを示しているため、上記センサによる電流量検出結果または温度検出結果に基づいて、腹囲の測定が行われる構成であってもよい。
【0109】
また、例えば上記第4実施形態において、電場応答性ポリマー46Aに印加される電圧を検出するセンサ(図示略)を設けてもよい。電場応答性ポリマー46Aに印加される電圧は電場応答性ポリマー46Aの変形度合いを示すため、上記センサによる電圧検出結果に基づいて、腹囲の測定が行われる構成であってもよい。
【0110】
また、例えば上記第5実施形態において、チューブ48に注入された空気量を検出するセンサ(図示略)を設けてもよい。チューブ48に注入された空気量はチューブ48の伸縮度合いを示すため、上記センサによる空気量検出結果に基づいて、腹囲の測定が行われる構成であってもよい。
【0111】
以上のように、上記第6実施形態に限らず、体組成測定装置1が、電流電極対20および電圧電極対30A〜30Cが接する基準断面の外周の長さ、すなわち腹囲を測定するためのセンサを備えていてもよい。このような構成によれば、電流電極対20および電圧電極対30A〜30Cの位置を調整するとともに、測定対象者の腹囲の長さを測定することができる。その結果、測定対象者が腹囲の情報を体組成測定装置1に入力しない場合であっても、腹囲の測定結果に基づいて体組成を精度良く測定することができる。
【0112】
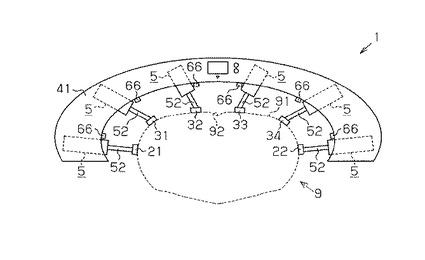
・図25に示すように、体組成測定装置1が、本体部41から人体9までの距離を検出する複数の測距センサ66を備えていてもよい。距離を検出する測距センサ66は、例えば光測距センサや超音波測距センサにより構成することができる。そして、測距センサ66による距離検出結果に基づいて、腹囲の測定が行われてもよい。
【0113】
・図26に示すように、体組成測定装置1が、例えば光測距センサや超音波測距センサにより構成された1つの測距センサ67を備え、この測距センサ67を図26中の二点鎖線の矢印で示すように移動させて、本体部41から人体9までの距離を検出してもよい。そして、測距センサ67による距離検出結果に基づいて、腹囲の測定が行われてもよい。
【0114】
・上記第6実施形態において、伸縮機構5が、弾性体53に代えて、棒状の伸縮部材52を直線運動させる電気モータ(図示略)を備える構成であってもよい。すなわち、伸縮部材52が電気モータで駆動されることにより、伸縮部材52が本体部41および固定部51から突き出て、伸縮部材52に設けられた電流電極対20および電圧電極対30A〜30Cの位置関係が変化する構成であってもよい。
【0115】
・上記第6実施形態において、伸縮部材52をエアシリンダにより構成するとともに、伸縮機構5が、エアシリンダである棒状の伸縮部材にエアを注入するエア調整ポンプ(図示略)を備える構成であってもよい。すなわち、伸縮部材52にエアが注入されることにより、伸縮部材52が本体部41および固定部51から突き出て、伸縮部材52に設けられた電流電極対20および電圧電極対30A〜30Cの位置関係が変化する構成であってもよい。
【0116】
・上記第6実施形態において、電極21,22,31〜34は、電気モータ等の駆動源を用いずに、手動で位置が調整される構成であってもよい。また、電極21,22,31〜34の各々の位置が独立して調整される構成であっても、電極21,22,31〜34の位置が連動して調整される構成であってもよい。
【0117】
・人体9の位置決め基準が骨棘であって、骨棘と位置合わせされる指標部14が設けられる構成であってもよい。すなわち、人体9の位置決め基準は、臍92に限らず、骨盤等の他の目印になる部位であってもよい。
【0118】
・体組成測定装置1が、電極21,22,31〜34が水平に保たれるように、水平センサを含む水平儀(図示略)を備える構成であってもよい。このような構成に依れば、測定対象者は、水平儀を参照することにより、より適切な位置に電極21,22,31〜34を設けることが可能となる。
【0119】
・上記第1〜6実施形態においては電圧電極対30A,30B,30Cの位置が調整される構成であったが、電圧電極対30A,30B,30Cのうち、1つ、または2つの電圧電極対を省いてもよい。すなわち、本発明は、電圧電極対を少なくとも1つ備えた体組成測定装置に適用することができる。
【0120】
・上記第1〜6実施形態においては電流電極対20の位置も調整される構成であったが、調整機構4によって電流電極対20の位置が調整されない構成であってもよい。すなわち、電圧電極対の位置調整と電流電極対の位置調整が、別々に行われる構成であってもよく、本発明は、少なくとも電圧電極対の位置が調整される体組成測定装置に適用することができる。
【0121】
・本発明は、体脂肪を測定するものだけでなく、例えば、体組成として筋肉量を測定する体組成測定装置に適用することもできる。
【符号の説明】
【0122】
L1〜L3…基準断面、1…体組成測定装置、4…調整機構、5…伸縮機構、9…人体、91…腕部(所定部位)、20…電流電極対、21,22…電流電極、30A〜30C…電圧電極対、31〜34…電圧電極、41…本体部(基体)、45…形状記憶合金(変形素材)、46A…電場応答性ポリマー(伸縮素材)、48…チューブ(伸縮素材)、61…光センサ。
【技術分野】
【0001】
本発明は、第1の電流電極および第2の電流電極を含む電流電極対と、第1の電圧電極および第2の電圧電極を含む電圧電極対とを備える体組成測定装置に関する。
【背景技術】
【0002】
脂肪や筋肉等の人体の体組成の電気的抵抗が異なることを利用して体組成を測定する体脂肪測定装置が知られている。上記体脂肪測定装置として、特許文献1には、電極を帯の中に組み込んだものが記載されている。また、特許文献2には、電極を有する筐体部の各々が分離できるように構成されたものが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−309123号公報
【特許文献2】特開2001−190513号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、体組成を測定する際には、電圧を測定するための電圧電極対を人体の所定部位に適切に接触させる必要がある。しかし、特許文献1に記載されるものでは、体型の違いによって、以下に説明するように体組成を精度良く測定することができないおそれがある。
【0005】
図27に示すように、例えば、腹部191における体組成を測定する体組成測定装置101において、測定対象者の腹囲が大きい場合には、電流電極対120および電圧電極対130が、人体109の前面寄りに設けられる。また、図28に示すように、例えば、測定対象者の腹囲が小さい場合には、電流電極対120および電圧電極対130が、人体109の側面寄りに設けられる。このように、腹囲の大きさが異なれば、電圧電極対130を用いて測定される体組成が体型に見合ったものでなくなり、体脂肪の測定に誤差が生じるという問題がある。
【0006】
また、特許文献2に記載されるものは、電圧電極対を構成する電極を測定対象者の任意の位置に設けることができるものの、その配置の自由度が高すぎるため、電圧電極対が適切に配置されないおそれがある。従って、特許文献2に記載されるものでも、体組成を精度良く測定することができないおそれがある。
【0007】
本発明はこのような実情に鑑みてなされたものであり、その目的は、人体の所定部位の周囲の長さが測定対象者毎に異なる場合であっても、体組成を精度良く測定することのできる体組成測定装置を提供することにある。
【課題を解決するための手段】
【0008】
以下、上記目的を達成するための手段について記載する。
・本発明の体組成測定装置は、第1の電流電極および第2の電流電極を含む電流電極対と、第1の電圧電極および第2の電圧電極を含む電圧電極対とを備える体組成測定装置において、人体の所定部位を輪切りにしたときの同部位の断面を基準断面として、周囲の長さが異なって互いに相似する2つの基準断面を第1の基準断面および第2の基準断面とし、前記電圧電極対の位置を調整する調整機構を備え、前記電圧電極対が前記第1の基準断面の外周に対応する位置にあるときの、前記第1の基準断面の外周の長さに対する前記第1の電圧電極と前記第2の電圧電極との距離の比を第1の比とし、前記電圧電極対が前記第2の基準断面の外周に対応する位置にあるときの、前記第2の基準断面の外周の長さに対する前記第1の電圧電極と前記第2の電圧電極との距離の比を第2の比としたときに、前記調整機構は、前記第1の比と前記第2の比とが同じものになるように前記電圧電極対の位置を調整することを特徴としている。
【0009】
・上記体組成測定装置において、前記調整機構は伸縮素材を含み、前記伸縮素材が変形することにより、前記電圧電極対の位置が調整されることが好ましい。
・上記体組成測定装置において、前記調整機構は、前記伸縮素材としてベルト状の形状記憶合金を備え、前記基準断面のうち、周囲の長さが大きい断面を前記第1の基準断面とし、周囲の長さが小さい断面を前記第2の基準断面としたときに、前記形状記憶合金に電流を印加することにより同形状記憶合金が変形して、この形状記憶合金を介して接続されている前記電圧電極対の位置が、前記第1の基準断面に対応する位置から前記第2の基準断面に対応する位置に変化することが好ましい。
【0010】
・上記体組成測定装置において、前記調整機構は、前記伸縮素材として電場応答性ポリマーを備え、前記基準断面のうち、周囲の長さが大きい断面を前記第1の基準断面とし、周囲の長さが小さい断面を前記第2の基準断面としたときに、前記電場応答性ポリマーに電圧を印加することにより同電場応答性ポリマーが縮んで、この電場応答性ポリマーを介して接続されている前記電圧電極対の位置が、前記第1の基準断面に対応する位置から前記第2の基準断面に対応する位置に変化することが好ましい。
【0011】
・上記体組成測定装置において、前記調整機構は、前記伸縮素材として伸縮性を有するチューブを備え、前記基準断面のうち、周囲の長さが大きい断面を前記第1の基準断面とし、周囲の長さが小さい断面を前記第2の基準断面としたときに、前記チューブ内に気体が注入されることにより同チューブが膨らんで、このチューブに設けられた前記電圧電極対の位置が、前記第1の基準断面に対応する位置から前記第2の基準断面に対応する位置に変化することが好ましい。
【0012】
・上記体組成測定装置において、前記調整機構は、基体と、この基体に支持されるとともに前記電圧電極対が設けられた伸縮可能な伸縮機構とを備え、前記伸縮機構が伸縮することにより、前記基体から前記電圧電極対までの距離が変化して前記電圧電極対の位置が調整され、前記伸縮機構は、前記第1の比と前記第2の比とが同じものになるように伸縮することが好ましい。
【0013】
・上記体組成測定装置において、前記電圧電極対の位置を検出するセンサを備えていることが好ましい。
・上記体組成測定装置において、腹囲を測定するためのセンサを備えていることが好ましい。
【0014】
・上記体組成測定装置において、前記調整機構は、前記電流電極対の位置を調整し、前記電流電極対が前記第1の基準断面の外周に対応する位置にあるときの、前記第1の基準断面の外周の長さに対する前記第1の電流電極と前記第2の電流電極との距離の比を第3の比とし、前記電流電極対が前記第2の基準断面の外周に対応する位置にあるときの、前記第2の基準断面の外周の長さに対する前記第1の電流電極と前記第2の電流電極との距離の比を第4の比としたときに、前記調整機構は、前記第3の比と前記第4の比とが同じものになるように前記電流電極対の位置を調整することが好ましい。
【発明の効果】
【0015】
本発明によれば、人体の所定部位の周囲の長さが測定対象者毎に異なる場合であっても、体組成を精度良く測定することのできる体組成測定装置を提供することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1実施形態の体組成測定装置の構成を示すブロック図。
【図2】同実施形態の体組成測定装置の使用態様を示す模式図。
【図3】同実施形態の体組成測定装置の外観を示す斜視図。
【図4】同実施形態の体組成測定装置を示す平面図と、接続体の構成を示す模式図。
【図5】同実施形態の体組成測定装置を示す平面図。
【図6】同実施形態の体組成測定装置が備える電極と人体との位置関係を模式的に示す模式図。
【図7】同実施形態の体組成測定装置が備える電極と人体との位置関係を模式的に示す模式図。
【図8】本発明の第2実施形態の体組成測定装置の外観を示す斜視図。
【図9】同実施形態の体組成測定装置を示す平面図。
【図10】本発明の第3実施形態の体組成測定装置の外観を示す斜視図。
【図11】同実施形態の体組成測定装置を示す平面図と、接続体の構成を示す模式図。
【図12】同実施形態の体組成測定装置を示す平面図。
【図13】本発明の第4実施形態の体組成測定装置を示す平面図と、接続体の構成を示す模式図。
【図14】本発明の第5実施形態の体組成測定装置の外観を示す斜視図。
【図15】同実施形態の体組成測定装置を示す平面図。
【図16】同実施形態の体組成測定装置を示す平面図。
【図17】本発明の第6実施形態の体組成測定装置の外観を示す斜視図。
【図18】同実施形態の体組成測定装置の外観を示す平面図。
【図19】同実施形態の体組成測定装置が備える伸縮機構を模式的に示す断面図。
【図20】同実施形態の体組成測定装置を示す平面図。
【図21】本発明の体組成測定装置の変形例を示す模式図。
【図22】本発明の体組成測定装置の変形例を示す平面図。
【図23】本発明の体組成測定装置の変形例について、(a)は体組成測定装置を示す斜視図、(b)は体組成測定装置が備える腹囲測定用メジャーを示す模式図。
【図24】本発明の体組成測定装置の変形例を示す模式図。
【図25】本発明の体組成測定装置の変形例を示す平面図。
【図26】本発明の体組成測定装置の変形例を示す平面図。
【図27】従来の体組成測定装置の使用態様を示す模式図。
【図28】従来の体組成測定装置の使用態様を示す模式図。
【発明を実施するための形態】
【0017】
(第1実施形態)
図1〜図7を参照して、本発明の第1実施形態について説明する。
図1に示すように、体組成測定装置1は、体組成の測定を行うための電極群2と、電極群2を用いた体組成の測定動作を制御する制御部11と、体組成の測定動作を操作するための操作部12と、体組成の測定結果を表示する表示部13とを備えている。
【0018】
電極群2は、複数の電極21,22,31〜34により構成されている。具体的には、電極群2は、電流を印加するための電流電極として、第1電流電極21と第2電流電極22を備えている。第1電流電極21と第2電流電極22とにより電流電極対20が構成されている。電流電極21,22の各々は、電極線を介して制御部11に接続されている。
【0019】
また、電極群2は、電圧を測定するための電圧電極として、第1電圧電極31と第2電圧電極32と第3電圧電極33と第4電圧電極34を備えている。第1電圧電極31と第2電圧電極32とにより第1電圧電極対30Aが構成され、第2電圧電極32と第3電圧電極33とにより第2電圧電極対30Bが構成され、第3電圧電極33と第4電圧電極34とにより第3電圧電極対30Cが構成されている。電圧電極31,32,33,34の各々は、電極線を介して制御部11に接続されている。
【0020】
制御部11は、例えばマイクロコンピュータにより構成された集積回路である。制御部11には、体脂肪の測定の開始を指示する信号や、腹囲を示す信号等が入力される。制御部11は、体脂肪の測定の開始を指示する信号が入力されたときに、体組成である体脂肪の測定を開始する。体脂肪の測定を開始するときに、制御部11は、電流電極対20による電流の印加を開始する。このようにして、電流電極21,22間に電流が流れる。そして、制御部11は、電圧電極対30A〜30Cを用いて電圧を測定する。すなわち、制御部11は、電圧電極31,32間、電圧電極32,33間、および電圧電極33,34間の電圧を測定する。また、制御部11は、上記電圧の測定結果に基づいて、体脂肪率と体脂肪分布を算出して、体脂肪を測定する。そして、体脂肪の測定結果を信号として表示部13に出力する。なお、制御部11は、腹囲を示す信号が入力されているときには、腹囲と上記電圧の測定結果に基づいて、体脂肪率と体脂肪分布を算出する。
【0021】
操作部12は、スイッチやボタン等により構成された入力用マンマシンインタフェースである。操作部12は、信号伝達線を介して制御部11に接続されている。操作部12が操作されることにより、体脂肪の測定の開始を指示する信号や、腹囲を示す信号が制御部11に入力される。
【0022】
表示部13は、例えば液晶パネルにより構成された出力用マンマシンインタフェースである。表示部13は、信号伝達線を介して制御部11に接続されている。表示部13は、制御部11から入力される体脂肪の測定結果を示す信号に基づいて、体脂肪の測定結果を表示する。
【0023】
図2に示すように、体脂肪測定装置である体組成測定装置1は、測定対象者の人体9において、人体9の所定部位である腹部91に当てて用いられる。すなわち、体組成測定装置1による体脂肪の測定対象部位は腹部91である。人体9に対する体組成測定装置1の位置の決定は、例えば腹部91における臍92を用いて行うことができる。
【0024】
図3および図4を参照しながら、腹部91に設けられる電極群2の配置等を説明する。
図3に示すように、体組成測定装置1は、本体部41と、電極21,22,31〜34を支持する電極支持部42A〜42Fとを備えている。
【0025】
本体部41には、操作部12および表示部13が設けられるともに、制御部11が内蔵されている。また、本体部41には、人体9の位置決め基準である臍92と位置合わせされる指標部14が設けられている。
【0026】
電極支持部42A〜42Fは、接続体43を用いて本体部41に接続されている。
図4に示すように、第1電流電極21を支持する電極支持部42Aと、第1電圧電極31を支持する電極支持部42Bとが接続体43により接続されている。また、第1電圧電極31を支持する電極支持部42Bと、第2電圧電極32を支持する電極支持部42Cとが接続体43により接続されている。また、第2電流電極22を支持する電極支持部42Fと、第4電圧電極34を支持する電極支持部42Eとが接続体43により接続されている。また、第4電圧電極34を支持する電極支持部42Eと、第3電圧電極33を支持する電極支持部42Dとが接続体43により接続されている。そして、電極支持部42C,42Dの各々が接続体43により本体部41に接続されている。このような構成により、第1電流電極21、第1電圧電極31、第2電圧電極32、第3電圧電極33、第4電圧電極34、第2電流電極22の順番で整列するように電極群2が腹部91に設けられる。
【0027】
接続体43は、例えばシリンダにより構成されるとともに、ラック・ピニオン構造43Aを備えている。ラック・ピニオン構造43Aは、互いに噛み合うラック43Bとピニオン43Cとにより構成されている。ピニオン43Cが電気モータ43Dを駆動源として回転することにより、ラック43B上をピニオン43Cが移動する。このように、ラック・ピニオン構造43Aを備える接続体43は、伸縮可能な伸縮機構である。
【0028】
図4(a)および(b)に示すように、接続体43が伸縮することにより、電極支持部42A〜42Fに設けられた電流電極対20および電圧電極対30A〜30Cの位置関係が変化する。なお、このとき、電極21,22,31〜34のうち隣り合った3つの電極のなす4つの角度は一定である。すなわち、電極21,31,32のなす角度と、電極31,32,33のなす角度と、電極32,33,34のなす角度と、電極33,34,22のなす角度は変化しない。図4(a)は、接続体43が伸びた状態を示す図であって、図4(b)は、接続体43が縮んだ状態を示す図である。従って、本体部41と電極支持部42A〜42Fと接続体43とにより、電流電極対20および電圧電極対30A〜30Cの位置を調整する調整機構4が構成されている。
【0029】
図5等を参照しながら、本実施形態の作用について説明する。図5において、破線によって囲まれる領域は、人体9の所定部位である腹部91を輪切りにしてモデル化したものである。本実施形態においては、図5において破線によって囲まれる領域を基準断面とする。
【0030】
図5(a)に示す第1基準断面L1と、図5(b)に示す第2基準断面L2と、図5(c)に示す第3基準断面L3とは、周囲の長さが異なって互いに相似な形状である。調整機構4の接続体43が伸縮することにより、互いに相似する基準断面L1〜L3の各々に電極21,22,31〜34が接する。
【0031】
すなわち、図5(a)に示すように、第1基準断面L1の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図5(a)に示す状態から接続体43を縮めることにより、図5(b)に示すように、第1基準断面L1を縮小した形状である第2基準断面L2の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図5(b)に示す状態から接続体43をさらに縮めることにより、図5(c)に示すように、第2基準断面L2を縮小した形状である第3基準断面L3の外周に、電流電極対20および電圧電極対30A〜30Cが接する。
【0032】
図6は、基準断面L1〜L3の中心Cを重ね合わせたときに、各基準断面L1〜L3に接する電極21,22,31〜34の位置を示す模式図である。図6に示すように、調整機構4によって位置が調整される電極21,22,31〜34の各々は、中心Cを通過する一点鎖線で示す直線上を変位する。図6における一点鎖線上を電極21,22,31〜34が変位するように、ピニオン43Cの歯数および電気モータ43Dの回転数が設定されるとともに、接続体43の各々が連動して伸縮するように構成されている。接続体43の伸縮は、操作部12が操作されることにより調整機構4を動作させる信号が制御部11に入力されたときに、制御部11が接続体43の各々に対応する電気モータ43Dを駆動させることにより行われる。
【0033】
以上のように電極21,22,31〜34の位置が調整されることによって、電極21,22,31〜34が接触する基準断面において、基準断面の外周の長さに対する電極間の比が保たれる。
【0034】
すなわち、図7に示すように、第1基準断面L1の外周の長さに対する電圧電極31,32間の距離D1の比と、第2基準断面L2の外周の長さに対する電圧電極31,32間の距離E1の比は同じである。さらに、第1基準断面L1の外周の長さに対する電圧電極31,32間の距離D1の比と、第3基準断面L3の外周の長さに対する電圧電極31,32間の距離F1の比も同じである。なお、距離D1,E1,F1は、基準断面の外周に沿った長さである。
【0035】
また、第1基準断面L1の外周の長さに対する電圧電極32,33間の距離D2の比と、第2基準断面L2の外周の長さに対する電圧電極32,33間の距離E2の比は同じである。さらに、第1基準断面L1の外周の長さに対する電圧電極32,33間の距離D2の比と、第3基準断面L3の外周の長さに対する電圧電極32,33間の距離F2の比も同じである。なお、距離D2,E2,F2は、基準断面の外周に沿った長さである。
【0036】
また、第1基準断面L1の外周の長さに対する電圧電極33,34間の距離D3の比と、第2基準断面L2の外周の長さに対する電圧電極33,34間の距離E3の比は同じである。さらに、第1基準断面L1の外周の長さに対する電圧電極33,34間の距離D3の比と、第3基準断面L3の外周の長さに対する電圧電極33,34間の距離F3の比も同じである。なお、距離D3,E3,F3は、基準断面の外周に沿った長さである。
【0037】
また、第1基準断面L1の外周の長さに対する第1電流電極21と第1電圧電極31の間の距離D4の比と、第2基準断面L2の外周の長さに対する第1電流電極21と第1電圧電極31の間の距離E4の比は同じである。さらに、第1基準断面L1の外周の長さに対する第1電流電極21と第1電圧電極31の間の距離D4の比と、第3基準断面L3の外周の長さに対する第1電流電極21と第1電圧電極31の間の距離F4の比は同じである。なお、距離D4,E4,F4は、基準断面の外周に沿った長さである。
【0038】
また、第1基準断面L1の外周の長さに対する第4電圧電極34と第2電流電極22の間の距離D5の比と、第2基準断面L2の外周の長さに対する第4電圧電極34と第2電流電極22の間の距離E5の比は同じである。さらに、第1基準断面L1の外周の長さに対する第4電圧電極34と第2電流電極22の間の距離D4の比と、第3基準断面L3の外周の長さに対する第4電圧電極34と第2電流電極22の間の距離F5の比は同じである。なお、距離D5,E5,F5は、基準断面の外周に沿った長さである。
【0039】
従って、換言すれば、「距離D4:距離D1:距離D2:距離D3:距離D5」の比と、「距離E4:距離E1:距離E2:距離E3:距離E5」の比と、「距離F4:距離F1:距離F2:距離F3:距離F5」の比とは同じである。すなわち、電流電極21,22および電圧電極31〜34のうち隣り合った電極間の距離の比率は一定である。
【0040】
よって、電圧電極31〜34のうち隣り合った電圧電極間の距離の比率は一定であって、電圧電極31〜34が接する基準断面において、基準断面の外周の長さに対する第1電圧電極31から第4電圧電極34までの距離の比は一定である。すなわち、例えば、第1基準断面L1の外周の長さに対する電圧電極31,34間の距離(すなわち、距離D1〜D3の和)の比と、第2基準断面L2の外周の長さに対する電圧電極31,34間の距離(すなわち、距離E1〜E3の和)の比が同じである。換言すれば、電圧電極31〜34が接する基準断面において、基準断面の外周の長さに対する第1電圧電極31から第4電圧電極34までの距離の比は一定である。
【0041】
また、電流電極21,22が接する基準断面において、基準断面の外周の長さに対する第1電流電極21から第2電流電極22までの距離の比も一定である。すなわち、例えば、第1基準断面L1の外周の長さに対する電流電極21,22間の距離(すなわち、距離D1〜D5の和)の比と、第2基準断面L2の外周の長さに対する電流電極21,22間の距離(すなわち、距離E1〜E5の和)の比が同じである。
【0042】
なお、基準断面を含む平面において、電極21,22,31〜34のうち隣り合った電極の間隔(すなわち、電極間の距離)の比率を上述のごとく一定となるときには、電極21,22,31〜34について隣り合った3つの電極がなす4つの角度も定められる。しかし、基準断面L1〜L3の外周に対応する位置に設けられる電極21,22,31〜34は、人体9の表面に接触する位置に必然的に設けられる。このように基準断面L1〜L3の外周に対応する位置に電極21,22,31〜34が設けられたときには、電極21,22,31〜34について隣り合った3つの電極のなす角度が定まる。よって、電極21,22,31〜34が基準断面に接していないときに隣り合った電極のなす角度は、電極21,22,31〜34が基準断面に接しているときには隣り合った電極のなす角度と異なったものであってもよい。従って、例えば、本体部41および電極支持部42A〜42Fの各々に対して、接続体43が回動可能に接続されていてもよい。
【0043】
以上のように、測定対象者の腹囲に応じて電圧電極対30A〜30Cを用いて測定する電圧の測定対象範囲を変化させることができ、腹部91の大きさに応じた体脂肪の測定を行うことができる。なお、体脂肪の測定は、電圧電極対30A〜30Cのうち少なくとも1つの電圧電極対を用いて行われればよい。
【0044】
本実施形態によれば、以下の効果を奏することができる。
(1)第1電圧電極対30Aが第1基準断面L1の外周に対応する位置にあるときの、第1基準断面L1の外周の長さに対する電圧電極31,32間の距離D1の比を第1の比とする。また、電圧電極対30Aが第2基準断面L2の外周に対応する位置にあるときの、第2基準断面L2の外周の長さに対する電圧電極31,32間の距離E1の比を第2の比とする。本実施形態においては、体組成測定装置1は、第1の比と第2の比が同じものとなるように第1電圧電極対30Aの位置を調整する調整機構4を備えている。このため、調整機構4により、腹囲が大きい測定対象者であっても小さい測定対象者であっても、測定対象者の腹囲の全周に対する第1電圧電極31と第2電圧電極32との間の距離の比が同じものとなる。すなわち、測定対象者の腹囲の全周に対する第1電圧電極31と第2電圧電極32との間の距離の比が保たれる。従って、人体の所定部位の周囲の長さである腹囲の長さが測定対象者毎に異なる場合であっても、第1電圧電極対30Aを用いて体組成を精度良く測定することができる。
【0045】
また、調整機構4は、第1電圧電極対30Aと同様にして、電圧電極対30B,30Cの位置を調整する。このため、上記(1)と同様に、測定対象者の腹囲の全周に対する第2電圧電極32と第3電圧電極33との間の距離の比、および測定対象者の腹囲の全周に対する第3電圧電極33と第4電圧電極34との間の距離の比が保たれる。従って、腹囲の長さが測定対象者毎に異なる場合であっても、電圧電極対30B,30Cを用いて体組成を精度良く測定することができる。
【0046】
(2)電流電極対20が第1基準断面L1の外周に対応する位置にあるときの、第1基準断面L1の外周の長さに対する電流電極21,22間の距離の比を第3の比とする。また、電流電極対20が第2基準断面L2の外周に対応する位置にあるときの、第2基準断面L2の外周の長さに対する電流電極21,22間の距離の比を第4の比とする。本実施形態においては、調整機構4は、第3の比と第4の比とが同じものになるように電流電極対20の位置を調整する。このため、調整機構4により電圧電極対30A〜30Cの位置だけでなく電流電極対20の位置も調整される。従って、調整機構4とは別個の機構によって電流電極対20を適切な位置に設ける必要がなくなる。
【0047】
(3)第1電圧電極対30Aが第3基準断面L3の外周に対応する位置にあるときの、第3基準断面L3の外周の長さに対する電圧電極31,32間の距離F1の比を第5の比とする。本実施形態においては、調整機構4は、第1の比と第2の比と第5の比が同じものとなるように第1電圧電極対30Aの位置を調整する。従って、3つの基準断面L1〜L3において、測定対象者の腹囲の全周に対する電圧電極31,32間の比が同じものとなる。よって、2つの基準断面においてのみ腹囲の全周に対する電圧電極31,32間の距離の比が同じとなる場合に比べて、測定対象者の腹囲の全周に対する電圧電極31,32間の距離の比が確実に保たれる。
【0048】
また、調整機構4は、第1電圧電極対30Aと同様にして、第2電圧電極対30Bの位置を調整する。このため、上記(3)と同様に、3つの基準断面L1〜L3において、測定対象者の腹囲の全周に対する電圧電極32,33間の距離の比が同じものとなる。よって、2つの基準断面において腹囲の全周に対する電圧電極32,33間の距離の比が同じとなる場合に比べて、測定対象者の腹囲の全周に対する電圧電極32,33間の距離の比が確実に保たれる。また、調整機構4は、電圧電極対30A,30Bと同様にして、第3電圧電極対30Cの位置を調整する。このため、上記(3)と同様に、3つの基準断面L1〜L3において、測定対象者の腹囲の全周に対する電圧電極33,34間の距離の比が同じものとなる。よって、2つの基準断面において腹囲の全周に対する電圧電極33,34間の距離の比が同じとなる場合に比べて、測定対象者の腹囲の全周に対する電圧電極33,34間の距離の比が確実に保たれる。また、調整機構4は、電圧電極対30A〜30Cと同様にして、電流電極対20の位置を調整する。このため、上記(3)と同様に、3つの基準断面L1〜L3において、測定対象者の腹囲の全周に対する電流電極21,22間の距離の比が同じものとなる。
【0049】
(第2実施形態)
図8および図9を参照して、本発明の第2実施形態について説明する。なお、第1実施形態と同様の構成については、同一の符号を付してその説明を省略または簡略化する。
【0050】
図8に示すように、本実施形態の体組成測定装置1は、ベルト固定部である2つの本体部41と、2つの本体部41を接続する伸縮ベルト44Aとを備えている。すなわち、伸縮ベルト44Aの両端には、それぞれ本体部41が設けられている。
【0051】
伸縮ベルト44Aの端部が固定された本体部41には、測定対象者が把持するための取っ手である把持部15が設けられている。また、2つの本体部41のうち少なくとも一方の本体部41に、操作部12および表示部13が設けられるともに、制御部11が内蔵されている。
【0052】
伸縮性を有する伸縮ベルト44Aは、伸縮材料により構成されている。伸縮ベルト44Aを構成する伸縮材料としては、例えばベルト状のゴム引布を用いることができる。伸縮ベルト44Aの中央には、人体9の位置決め基準である臍92と位置合わせされる指標部14が設けられている。本実施形態の指標部14は伸縮ベルト44Aに形成された穴により構成されている。
【0053】
図9に示すように、伸縮ベルト44Aには、第1電流電極21、第1電圧電極31、第2電圧電極32、第3電圧電極33、第4電圧電極34、第2電流電極22の順番で整列するように電極群2が設けられている。
【0054】
図9(a)〜(c)に示すように、伸縮ベルト44Aが伸縮することにより、伸縮ベルト44Aに設けられた電流電極対20および電圧電極対30A〜30Cの位置関係が変化する。図9において、破線によって囲まれる領域は、上記第1実施形態と同様に、人体9の所定部位である腹部91を輪切りにしてモデル化した基準断面である。
【0055】
調整機構4の伸縮ベルト44Aが伸縮することにより、互いに相似する基準断面L1〜L3の各々に電極21,22,31〜34が接する。すなわち、図9(a)に示すように、第1基準断面L1の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図9(a)に示す状態から伸縮ベルト44Aを縮めることにより、図9(b)に示すように、第1基準断面L1を縮小した形状である第2基準断面L2の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図9(b)に示す状態から伸縮ベルト44Aをさらに縮めることにより、図9(c)に示すように、第2基準断面L2を縮小した形状である第3基準断面L3の外周に、電流電極対20および電圧電極対30A〜30Cが接する。
【0056】
本実施形態においても調整機構4によって位置が調整される電極21,22,31〜34の各々は、基準断面L1〜L3の中心C(図6参照)を通過する一点鎖線で示す直線上を変位する。以上のように電極21,22,31〜34の位置が調整されることによって、上記第1実施形態と同様に、電極21,22,31〜34が接触する基準断面において、基準断面の外周の長さに対する電極間の比が保たれる。
【0057】
本実施形態によれば、上記第1実施形態の(1)〜(3)に記載の効果に加えて、以下の効果を奏することができる。
(4)調整機構4は、伸縮素材である伸縮ベルト44Aを含み、伸縮ベルト44Aが変形、すなわち伸縮することにより、電極対20,30A〜30Cの位置が調整される。このため、伸縮ベルト44Aを変形させることにより、測定対象者の腹囲の全周に対する電圧電極31,32間の距離の比が同じものとなる。また、同様に、測定対象者の腹囲の全周に対する電圧電極32,33間の距離の比が同じものとなり、測定対象者の腹囲の全周に対する電圧電極33,34間の距離の比が同じものとなる。また、同様に、測定対象者の腹囲の全周に対する電流電極21,22間の距離の比が同じものとなる。
【0058】
(第3実施形態)
図10〜図12を参照して、本発明の第3実施形態について説明する。なお、第1実施形態と同様の構成については、同一の符号を付してその説明を省略または簡略化する。
【0059】
図10に示すように、本実施形態の体組成測定装置1は、接続体43に接続されていない本体部41を備えている。本体部41は、コード16を介して電極支持部42Fに接続されている。なお、本実施形態においては、人体9の位置決め基準と位置合わせされる指標部の図示は省略されている。
【0060】
電極支持部42A〜42Fは、接続体43を用いて直列に接続されている。
図11に示すように、第2電圧電極32を支持する電極支持部42Cと、第3電圧電極33を支持する電極支持部42Dとが、接続体43により本体部41を介さずに接続されている。
【0061】
本実施形態の接続体43は、ベルト状の形状記憶合金45を備えている。形状記憶合金45は、通電に起因して発生する熱により、記憶された形状に変形する特性を有している。従って、波打った形状を記憶している形状記憶合金45を伸ばした後に、形状記憶合金45に通電を行ったときには、形状記憶合金45は波打った形状に戻るように形状記憶合金45の全体が縮む変形材料である。
【0062】
図11(a)および(b)に示すように、接続体43の形状記憶合金45に電流が印加されることにより、電極支持部42A〜42Fに設けられた電流電極対20および電圧電極対30A〜30Cの位置関係が変化する。図11(a)は、形状記憶合金45に電流が印加される前の状態を示す図であって、図11(b)は、形状記憶合金45に電流が印加された後の状態を示す図である。形状記憶合金45に対する電流の印加は、例えばコード16を介して本体部41に設けられた電流印加部17が行う。従って、電流印加部17を含む本体部41と電極支持部42A〜42Fと接続体43とにより、電流電極対20および電圧電極対30A〜30Cの位置を調整する調整機構4が構成されている。
【0063】
図12を参照しながら、本実施形態の作用について説明する。図12において、破線によって囲まれる領域は、上記第1実施形態と同様に、人体9の所定部位である腹部91を輪切りにしてモデル化した基準断面である。
【0064】
調整機構4の形状記憶合金45が変形することにより、互いに相似する基準断面L1〜L3の各々に電極21,22,31〜34が接する。すなわち、図12(a)に示すように、第1基準断面L1の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図12(a)に示す状態から形状記憶合金45に所定量の電流を印加することにより、図12(b)に示すように、第1基準断面L1を縮小した形状である第2基準断面L2の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図12(b)に示す状態から形状記憶合金45にさらに大きな電流を印加することにより、図12(c)に示すように、第2基準断面L2を縮小した形状である第3基準断面L3の外周に、電流電極対20および電圧電極対30A〜30Cが接する。
【0065】
本実施形態においても調整機構4によって位置が調整される電極21,22,31〜34の各々は、基準断面L1〜L3の中心C(図6参照)を通過する一点鎖線で示す直線上を変位する。以上のように電極21,22,31〜34の位置が調整されることによって、上記第1および第2実施形態と同様に、電極21,22,31〜34が接触する基準断面において、基準断面の外周の長さに対する電極間の比が保たれる。
【0066】
なお、形状記憶合金45は熱により変形度合いが変化する変形材料である。従って、記憶された形状に変形する過程における形状記憶合金45の形状を維持するためには、例えば、形状記憶合金45に生じた温度を検出する温度センサ(図示略)の検出結果に基づいて、形状記憶合金45への電流の印加が制御されることが好ましい。
【0067】
本実施形態によれば、上記第1実施形態の(1)〜(3)に記載の効果に加えて、以下の効果を奏することができる。
(5)調整機構4は、伸縮素材である形状記憶合金45を含み、形状記憶合金45が変形することにより、電極対20,30A〜30Cの位置が調整される。このため、上記(4)に準じた効果を得ることができる。
【0068】
(6)調整機構4は、ベルト状の形状記憶合金45を備えている。この形状記憶合金45に電流を印加することにより形状記憶合金45が変形して、形状記憶合金45を介して接続されている電極対20,30A〜30Cの位置が、第1基準断面L1に対応する位置から第2基準断面L2に対応する位置に変化する。また、形状記憶合金45に電流をさらに印加することにより形状記憶合金45が変形して、電極対20,30A〜30Cが、第2基準断面L2に対応する位置から第3基準断面L3に対応する位置に変化する。このため、形状記憶合金45に電流を印加することにより、電流電極対20および電圧電極対30A〜30Cの位置を調整することができる。
【0069】
(第4実施形態)
図13を参照して、本発明の第4実施形態について説明する。なお、第1および第3実施形態と同様の構成については、同一の符号を付してその説明を省略または簡略化する。
【0070】
図13に示すように、本実施形態の体組成測定装置1は、上記第3実施形態と同様に、接続体43に接続されていない本体部41を備えている。
本実施形態の接続体43は、EPAM(Electroactive Polymer Artificial Muscle)46を備えている。EPAM46は、変形材料として電場応答性ポリマー46Aと、電場応答性ポリマー46Aを挟む電極46Bとにより構成されたアクチュエータである。電場応答性ポリマー46Aは、ゴム状の薄い電場応答性高分子膜であって、電場応答性ポリマー46Aに電圧が印加されると、伸縮材料である電場応答性ポリマー46Aは、印加された電圧に応じて電極46B間の距離が短くなるように伸展する特性を有している。
【0071】
図13(a)および(b)に示すように、接続体43の電場応答性ポリマー46Aに電極46Bを用いて電圧が印加されることにより、電極支持部42A〜42Fに設けられた電流電極対20および電圧電極対30A〜30Cの位置関係が変化する。図13(a)は、電場応答性ポリマー46Aに電圧が印加される前の状態を示す図であって、図13(b)は、電場応答性ポリマー46Aに電圧が印加されている状態を示す図である。電極46Bを用いた電場応答性ポリマー46Aに対する電圧の印加は、例えばコード16を介して本体部41に設けられた電圧印加部18が行う。従って、電圧印加部18を含む本体部41と電極支持部42A〜42Fと接続体43とにより、電流電極対20および電圧電極対30A〜30Cの位置を調整する調整機構4が構成されている。
【0072】
本実施形態の作用は、上記第3実施形態において図12を参照しながら説明した作用に準じたものである。
すなわち、調整機構4の電場応答性ポリマー46Aが変形することにより、図12に示した互いに相似する基準断面L1〜L3の各々に電極21,22,31〜34が接する。すなわち、図12(a)に示すように、第1基準断面L1の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図12(a)に示す状態から電場応答性ポリマー46Aに所定の電圧を印加することにより、図12(b)に示すように、第1基準断面L1を縮小した形状である第2基準断面L2の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図12(b)に示す状態から電場応答性ポリマー46Aにさらに大きな電圧を印加することにより、図12(c)に示すように、第2基準断面L2を縮小した形状である第3基準断面L3の外周に、電流電極対20および電圧電極対30A〜30Cが接する。
【0073】
本実施形態においても調整機構4によって位置が調整される電極21,22,31〜34の各々は、基準断面L1〜L3の中心C(図6参照)を通過する一点鎖線で示す直線上を変位する。以上のように電極21,22,31〜34の位置が調整されることによって、上記第1〜第3実施形態と同様に、電極21,22,31〜34が接触する基準断面において、基準断面の外周の長さに対する電極間の比が保たれる。
【0074】
本実施形態によれば、第1実施形態の(1)〜(3)に記載の効果に加えて、以下の効果を奏することができる。
(7)調整機構4は、伸縮素材である電場応答性ポリマー46Aを含み、電場応答性ポリマー46Aが変形することにより、電流電極対20および電圧電極対30A〜30Cの位置が調整される。このため、上記(4)に準じた効果を得ることができる。
【0075】
(8)調整機構4は、電場応答性ポリマー46Aを備えている。この電場応答性ポリマー46Aに電圧を印加することにより同ポリマー46Aが縮んで、電場応答性ポリマー46Aを介して接続されている電極対20,30A〜30Cの位置が、第1基準断面L1に対応する位置から第2基準断面L2に対応する位置に変化する。また、電場応答性ポリマー46Aに電圧をさらに印加することにより電場応答性ポリマー46Aが縮んで、電極対20,30A〜30Cの位置が、第2基準断面L2に対応する位置から第3基準断面L3に対応する位置に変化する。このため、電場応答性ポリマー46Aに電圧を印加することにより、電流電極対20および電圧電極対30A〜30Cの位置を調整することができる。
【0076】
(第5実施形態)
図14〜図16を参照して、本発明の第5実施形態について説明する。なお、第1実施形態と同様の構成については、同一の符号を付してその説明を省略または簡略化する。
【0077】
図14に示すように、本実施形態の体組成測定装置1は、上記第2実施形態と同様に、2つの本体部41を備えている。そして、体組成測定装置1は、2つの本体部41を接続する湾曲形状の基体47と、基体47の湾曲内側表面に設けられた伸縮性を有するチューブ48とを備えている。2つの本体部41のうち少なくとも一方の本体部41に、操作部12および表示部13が設けられるともに、制御部11が内蔵されている。また、基体47の中央には、人体9の位置決め基準である臍92と位置合わせされる指標部14が設けられている。
【0078】
中空形状のチューブ48は、伸縮材料により構成されている。チューブ48を構成する伸縮材料としては、例えば弾性を有するシリコンゴムを用いることができる。図15に示すように、チューブ48には、第1電流電極21、第1電圧電極31、第2電圧電極32、第3電圧電極33、第4電圧電極34、第2電流電極22の順番で整列するように電極群2が設けられている。
【0079】
チューブ48に空気が注入されることにより、チューブ48に設けられた電流電極対20および電圧電極対30A〜30Cの位置関係が変化する。チューブ48への空気の注入は、例えば本体部41に設けられたエア調整ポンプ19が行う。従って、エア調整ポンプ19を含む本体部41と基体47とチューブ48とにより、電流電極対20および電圧電極対30A〜30Cの位置を調整する調整機構4が構成されている。
【0080】
図16を参照しながら、本実施形態の作用について説明する。図16において、破線によって囲まれる領域は、上記第1実施形態と同様に、人体9の所定部位である腹部91を輪切りにしてモデル化した基準断面である。
【0081】
調整機構4のチューブ48が膨張又は収縮することにより、互いに相似する基準断面L1〜L3の各々に電極21,22,31〜34が接する。すなわち、図16(a)に示すように、第1基準断面L1の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図16(a)に示す状態からチューブ48に所定量の空気が注入されることにより、図16(b)に示すように、第1基準断面L1を縮小した形状である第2基準断面L2の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図16(b)に示す状態からチューブ48にさらに空気が注入されることにより、図16(c)に示すように、第2基準断面L2を縮小した形状である第3基準断面L3の外周に、電流電極対20および電圧電極対30A〜30Cが接する。
【0082】
本実施形態においても調整機構4によって位置が調整される電極21,22,31〜34の各々は、基準断面L1〜L3の中心C(図6参照)を通過する一点鎖線で示す直線上を変位する。以上のように電極21,22,31〜34の位置が調整されることによって、上記第1および第2実施形態と同様に、電極21,22,31〜34が接触する基準断面において、基準断面の外周の長さに対する電極間の比が保たれる。
【0083】
なお、チューブ48への空気の注入による電極21,22,31〜34の各々の変位量は、チューブ48内に形成される内部空間の形状により異ならせることができる。また、チューブ48を複数に分割して、各チューブ48への空気注入量を異ならせたり、各チューブ48の弾性を異ならせたりしてもよい。
【0084】
本実施形態によれば、第1実施形態の(1)〜(3)に記載の効果に加えて、以下の効果を奏することができる。
(9)調整機構4は、伸縮素材であるチューブ48を含み、チューブ48が変形することにより、電流電極対20および電圧電極対30A〜30Cの位置が調整される。このため、上記(4)に準じた効果を得ることができる。
【0085】
(10)調整機構4は、伸縮性を有するチューブ48を備えている。このチューブ48内に気体が注入されることにより同チューブ48が膨らんで、チューブ48に設けられた電極対20,30A〜30Cの位置が、第1基準断面L1に対応する位置から第2基準断面L2に対応する位置に変化する。また、チューブ48内に気体をさらに注入することによりチューブ48が膨らんで、電極対20,30A〜30Cの位置が、第2基準断面L2に対応する位置から第3基準断面L3に対応する位置に変化する。このため、チューブ48内に気体を注入することにより、電流電極対20および電圧電極対30A〜30Cの位置を調整することができる。
【0086】
(第6実施形態)
図17〜図19を参照して、本発明の第6実施形態について説明する。なお、第1実施形態と同様の構成については、同一の符号を付してその説明を省略または簡略化する。
【0087】
図17に示すように、本実施形態の体組成測定装置1は、湾曲した形状の本体部41を備えている。本体部41には、操作部12および表示部13が設けられるともに、制御部11が内蔵されている。また本体部41の中央には、人体9の位置決め基準である臍92と位置合わせされる指標部14が設けられている。
【0088】
図18に示すように、本体部41には、基体としての本体部41に支持されている伸縮機構5が設けられている。伸縮機構5には、電流電極21,22および電圧電極31〜34が設けられている。
【0089】
図19(a)に示すように、伸縮機構5は、本体部41に固定される固定部51に対して伸縮する棒状の伸縮部材52を備えている。固定部51と伸縮部材52との間には、伸縮部材52を付勢する弾性体53が設けられている。図19(b)に示すように、伸縮部材52が弾性体53で付勢されることにより、伸縮部材52が本体部41および固定部51から突き出て、伸縮部材52に設けられた電流電極対20および電圧電極対30A〜30Cの位置関係が変化する。従って、伸縮機構5を含む本体部41により、電流電極対20および電圧電極対30A〜30Cの位置を調整する調整機構4が構成されている。
【0090】
なお、伸縮部材52にはストッパ54が設けられている。このストッパ54が、固定部51に対して係止されていることにより伸縮部材52の移動が規制されている。従って、例えば操作部12が操作されて、ストッパ54による伸縮部材52の移動規制が解除されることにより、伸縮部材52が固定部51から突き出る。
【0091】
また、伸縮機構5には、本体部41から電圧電極対30Aである電圧電極31,32までの距離の変化を検出する光センサ61が設けられている。光センサ61は、伸縮部材52に設けられている光センサ用目印55を読み取ることにより、固定部51からの伸縮部材52の突出量を検出する。制御部11は、伸縮部材52の突出量の検出結果に基づいて、測定対象者の腹囲を算出する。
【0092】
図20を参照しながら、本実施形態の作用について説明する。図20において、破線によって囲まれる領域は、上記第1実施形態と同様に、人体9の所定部位である腹部91を輪切りにしてモデル化した基準断面である。
【0093】
調整機構4の伸縮部材52が伸縮することにより、互いに相似する基準断面L1〜L3の各々に電極21,22,31〜34が接する。すなわち、図20(a)に示すように、第1基準断面L1の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図20(a)に示す状態から伸縮部材52が伸びることにより、図20(b)に示すように、第1基準断面L1を縮小した形状である第2基準断面L2の外周に、電流電極対20および電圧電極対30A〜30Cが接する。図20(b)に示す状態から伸縮部材52がさらに伸びることにより、図20(c)に示すように、第2基準断面L2を縮小した形状である第3基準断面L3の外周に、電流電極対20および電圧電極対30A〜30Cが接する。
【0094】
本実施形態においても調整機構4によって位置が調整される電極21,22,31〜34の各々は、基準断面L1〜L3の中心C(図6参照)を通過する一点鎖線で示す直線上を変位する。以上のように電極21,22,31〜34の位置が調整されることによって、上記第1実施形態と同様に、電極21,22,31〜34が接触する基準断面において、基準断面の外周の長さに対する電極間の比が保たれる。
【0095】
本実施形態によれば、第1実施形態の(1)〜(3)に記載の効果に加えて、以下の効果を奏することができる。
(13)第1電圧電極対30Aが設けられた伸縮機構5は、上記第1の比と上記第2の比とが同じものになるように伸縮する。このため、基体である本体部41から第1電圧電極対30Aまでの距離を伸縮機構5で調整することにより、測定対象者の腹囲の全周に対する電圧電極31,32間の距離の比が同じものとなる。
【0096】
また、第2電圧電極対30Bが設けられた伸縮機構5も、第1電圧電極対30Aが設けられた伸縮機構5と同様に伸縮する。このため、基体である本体部41から第2電圧電極対30Bまでの距離を伸縮機構5で調整することにより、測定対象者の腹囲の全周に対する電圧電極32,33間の距離の比が同じものとなる。また、第3電圧電極対30Cが設けられた伸縮機構5も、電圧電極対30A,30Bが設けられた伸縮機構5と同様に伸縮する。このため、基体である本体部41から第3電圧電極対30Cまでの距離を伸縮機構5で調整することにより、測定対象者の腹囲の全周に対する電圧電極33,34間の距離の比が同じものとなる。また、電流電極対20が設けられた伸縮機構5も、電圧電極対30A〜30Cが設けられた伸縮機構5と同様に伸縮する。このため、基体である本体部41から電流電極対20までの距離を伸縮機構5で調整することにより、測定対象者の腹囲の全周に対する電流電極21,22間の距離の比が同じものとなる。
【0097】
(14)体組成測定装置1は、電極対20,30A〜30Cの位置を検出する光センサ61を備えている。このため、光センサ61の検出結果に基づいて腹囲の測定を行うことができる。
【0098】
(15)体組成測定装置1は、腹囲を測定するためのセンサとして光センサ61を備えている。このため、測定対象者が腹囲の情報を体組成測定装置1に入力しない場合であっても、光センサ61による測定対象者の腹囲の測定結果に基づいて体組成を精度良く測定することができる。
【0099】
(その他の実施形態)
なお、本発明の実施態様は上記各実施形態に限られるものではなく、例えば以下に示すように変更することもできる。また以下の変形例は、上記各実施形態についてのみ適用されるものではなく、異なる変形例同士を互いに組み合わせて実施してもよい。
【0100】
・上記第1実施形態において、接続体43は、ラック・ピニオン構造43Aを備えるものに限定されない。すなわち、接続体43が伸縮可能な伸縮機構として構成されるのであれば、例えば油圧シリンダまたは空気圧シリンダにより接続体43が構成されてもよい。
【0101】
・上記第1、第3、および第4実施形態において、接続体43は、シリンダ以外のものにより構成されていてもよい。例えば蛇腹状の筒部材により構成されていてもよい。また、上記第3および第4実施形態における接続体43は、形状記憶合金45またはEPAM46を収める筒部材が省かれた構成であってもよい。
【0102】
・仰臥位の測定対象者の体脂肪を体組成測定装置1により測定してもよい。この場合には、例えば図21に示すように、体組成測定装置1が、紐14Bで吊り下げられた錘14Aにより構成された指標部14を備えていてもよい。また、体組成測定装置1が、紐14Bの張力を検出する力センサ62を備え、力センサ62による張力検出結果に基づいて、腹囲の測定が行われてもよい。
【0103】
・体組成測定装置1は、基準断面の全周を覆う構成であってもよい。例えば図22に示すように、上記第2実施形態の2つの本体部41に、伸縮ベルト44Aと同様に伸縮材料により構成された伸縮ベルト44Bが設けられて、伸縮ベルト44A,44Bが環状に構成されていてもよい。この場合に、図22に示すように、他の電極71〜76を、電圧電極31〜34と同様に、伸縮ベルト44Bに設けてもよい。
【0104】
・上記第1〜5実施形態において、体組成測定装置1が、上記第6実施形態と同様に、電流電極対20および電圧電極対30A,30B,30Cが接する基準断面の外周の長さを測定するためのセンサを備えていてもよい。例えば図23に示すように、上記第2実施形態の伸縮ベルト44Aに、光センサ63Cを含む腹囲測定用メジャー63が設けられていてもよい。
【0105】
腹囲測定用メジャー63は、腹部91に巻かれる紐63Aと、紐63Aに設けられた光センサ用目印63Bを読み取る光センサ63Cと、紐63Aを巻き取る巻き取り機構63Dとにより構成されている。光センサ63Cは、光センサ用目印63Bを読み取ることにより、測定対象者の腹囲に巻かれた紐63Aの長さを検出することができる。制御部11は、光センサ63Cによる紐63Aの長さの検出結果に基づいて、測定対象者の腹囲を算出する。この場合、伸縮ベルト44Aに沿って紐63Aが腹囲に確実に巻かれるように、紐63Aを留める紐留め具44Cが伸縮ベルト44Aに設けられていることが好ましい。
【0106】
また、例えば図24(a)に示すように、上記第2実施形態の伸縮ベルト44Aに、伸縮ベルト44Aの張力を検出する力センサ64が設けて、この力センサ64による張力検出結果に基づいて、腹囲の測定が行われてもよい。
【0107】
また、例えば図24(b)に示すように、上記第2実施形態の伸縮ベルト44Aに光センサ用目印44Dを設けて、体組成測定装置1が光センサ用目印44Dを読み取る光センサ65を備える構成であってもよい。光センサ65は、光センサ用目印44Dを読み取ることにより、伸縮ベルト44Aの伸縮量を検出することができ、光センサ65による伸縮量検出結果に基づいて、腹囲の測定が行われてもよい。
【0108】
また、例えば上記第3実施形態において、形状記憶合金45に印加される電流量を検出するセンサ(図示略)を設けたり、形状記憶合金45の温度を検出するセンサを設けたりしてもよい。形状記憶合金45に印加される電流量および形状記憶合金45の温度は、形状記憶合金45の変形度合いを示しているため、上記センサによる電流量検出結果または温度検出結果に基づいて、腹囲の測定が行われる構成であってもよい。
【0109】
また、例えば上記第4実施形態において、電場応答性ポリマー46Aに印加される電圧を検出するセンサ(図示略)を設けてもよい。電場応答性ポリマー46Aに印加される電圧は電場応答性ポリマー46Aの変形度合いを示すため、上記センサによる電圧検出結果に基づいて、腹囲の測定が行われる構成であってもよい。
【0110】
また、例えば上記第5実施形態において、チューブ48に注入された空気量を検出するセンサ(図示略)を設けてもよい。チューブ48に注入された空気量はチューブ48の伸縮度合いを示すため、上記センサによる空気量検出結果に基づいて、腹囲の測定が行われる構成であってもよい。
【0111】
以上のように、上記第6実施形態に限らず、体組成測定装置1が、電流電極対20および電圧電極対30A〜30Cが接する基準断面の外周の長さ、すなわち腹囲を測定するためのセンサを備えていてもよい。このような構成によれば、電流電極対20および電圧電極対30A〜30Cの位置を調整するとともに、測定対象者の腹囲の長さを測定することができる。その結果、測定対象者が腹囲の情報を体組成測定装置1に入力しない場合であっても、腹囲の測定結果に基づいて体組成を精度良く測定することができる。
【0112】
・図25に示すように、体組成測定装置1が、本体部41から人体9までの距離を検出する複数の測距センサ66を備えていてもよい。距離を検出する測距センサ66は、例えば光測距センサや超音波測距センサにより構成することができる。そして、測距センサ66による距離検出結果に基づいて、腹囲の測定が行われてもよい。
【0113】
・図26に示すように、体組成測定装置1が、例えば光測距センサや超音波測距センサにより構成された1つの測距センサ67を備え、この測距センサ67を図26中の二点鎖線の矢印で示すように移動させて、本体部41から人体9までの距離を検出してもよい。そして、測距センサ67による距離検出結果に基づいて、腹囲の測定が行われてもよい。
【0114】
・上記第6実施形態において、伸縮機構5が、弾性体53に代えて、棒状の伸縮部材52を直線運動させる電気モータ(図示略)を備える構成であってもよい。すなわち、伸縮部材52が電気モータで駆動されることにより、伸縮部材52が本体部41および固定部51から突き出て、伸縮部材52に設けられた電流電極対20および電圧電極対30A〜30Cの位置関係が変化する構成であってもよい。
【0115】
・上記第6実施形態において、伸縮部材52をエアシリンダにより構成するとともに、伸縮機構5が、エアシリンダである棒状の伸縮部材にエアを注入するエア調整ポンプ(図示略)を備える構成であってもよい。すなわち、伸縮部材52にエアが注入されることにより、伸縮部材52が本体部41および固定部51から突き出て、伸縮部材52に設けられた電流電極対20および電圧電極対30A〜30Cの位置関係が変化する構成であってもよい。
【0116】
・上記第6実施形態において、電極21,22,31〜34は、電気モータ等の駆動源を用いずに、手動で位置が調整される構成であってもよい。また、電極21,22,31〜34の各々の位置が独立して調整される構成であっても、電極21,22,31〜34の位置が連動して調整される構成であってもよい。
【0117】
・人体9の位置決め基準が骨棘であって、骨棘と位置合わせされる指標部14が設けられる構成であってもよい。すなわち、人体9の位置決め基準は、臍92に限らず、骨盤等の他の目印になる部位であってもよい。
【0118】
・体組成測定装置1が、電極21,22,31〜34が水平に保たれるように、水平センサを含む水平儀(図示略)を備える構成であってもよい。このような構成に依れば、測定対象者は、水平儀を参照することにより、より適切な位置に電極21,22,31〜34を設けることが可能となる。
【0119】
・上記第1〜6実施形態においては電圧電極対30A,30B,30Cの位置が調整される構成であったが、電圧電極対30A,30B,30Cのうち、1つ、または2つの電圧電極対を省いてもよい。すなわち、本発明は、電圧電極対を少なくとも1つ備えた体組成測定装置に適用することができる。
【0120】
・上記第1〜6実施形態においては電流電極対20の位置も調整される構成であったが、調整機構4によって電流電極対20の位置が調整されない構成であってもよい。すなわち、電圧電極対の位置調整と電流電極対の位置調整が、別々に行われる構成であってもよく、本発明は、少なくとも電圧電極対の位置が調整される体組成測定装置に適用することができる。
【0121】
・本発明は、体脂肪を測定するものだけでなく、例えば、体組成として筋肉量を測定する体組成測定装置に適用することもできる。
【符号の説明】
【0122】
L1〜L3…基準断面、1…体組成測定装置、4…調整機構、5…伸縮機構、9…人体、91…腕部(所定部位)、20…電流電極対、21,22…電流電極、30A〜30C…電圧電極対、31〜34…電圧電極、41…本体部(基体)、45…形状記憶合金(変形素材)、46A…電場応答性ポリマー(伸縮素材)、48…チューブ(伸縮素材)、61…光センサ。
【特許請求の範囲】
【請求項1】
第1の電流電極および第2の電流電極を含む電流電極対と、第1の電圧電極および第2の電圧電極を含む電圧電極対とを備える体組成測定装置において、
人体の所定部位を輪切りにしたときの同部位の断面を基準断面として、周囲の長さが異なって互いに相似する2つの基準断面を第1の基準断面および第2の基準断面とし、
前記電圧電極対の位置を調整する調整機構を備え、
前記電圧電極対が前記第1の基準断面の外周に対応する位置にあるときの、前記第1の基準断面の外周の長さに対する前記第1の電圧電極と前記第2の電圧電極との距離の比を第1の比とし、
前記電圧電極対が前記第2の基準断面の外周に対応する位置にあるときの、前記第2の基準断面の外周の長さに対する前記第1の電圧電極と前記第2の電圧電極との距離の比を第2の比としたときに、
前記調整機構は、前記第1の比と前記第2の比とが同じものになるように前記電圧電極対の位置を調整する
ことを特徴とする体組成測定装置。
【請求項2】
請求項1に記載の体組成測定装置において、
前記調整機構は、伸縮素材を含み、
前記伸縮素材が変形することにより、前記電圧電極対の位置が調整される
ことを特徴とする体組成測定装置。
【請求項3】
請求項2に記載の体組成測定装置において、
前記調整機構は、前記伸縮素材としてベルト状の形状記憶合金を備え、
前記基準断面のうち、周囲の長さが大きい断面を前記第1の基準断面とし、周囲の長さが小さい断面を前記第2の基準断面としたときに、
前記形状記憶合金に電流を印加することにより同形状記憶合金が変形して、この形状記憶合金を介して接続されている前記電圧電極対の位置が、前記第1の基準断面に対応する位置から前記第2の基準断面に対応する位置に変化する
ことを特徴とする体組成測定装置。
【請求項4】
請求項2に記載の体組成測定装置において、
前記調整機構は、前記伸縮素材として電場応答性ポリマーを備え、
前記基準断面のうち、周囲の長さが大きい断面を前記第1の基準断面とし、周囲の長さが小さい断面を前記第2の基準断面としたときに、
前記電場応答性ポリマーに電圧を印加することにより同電場応答性ポリマーが縮んで、この電場応答性ポリマーを介して接続されている前記電圧電極対の位置が、前記第1の基準断面に対応する位置から前記第2の基準断面に対応する位置に変化する
ことを特徴とする体組成測定装置。
【請求項5】
請求項2に記載の体組成測定装置において、
前記調整機構は、前記伸縮素材として伸縮性を有するチューブを備え、
前記基準断面のうち、周囲の長さが大きい断面を前記第1の基準断面とし、周囲の長さが小さい断面を前記第2の基準断面としたときに、
前記チューブ内に気体が注入されることにより同チューブが膨らんで、このチューブに設けられた前記電圧電極対の位置が、前記第1の基準断面に対応する位置から前記第2の基準断面に対応する位置に変化する
ことを特徴とする体組成測定装置。
【請求項6】
請求項1に記載の体組成測定装置において、
前記調整機構は、基体と、この基体に支持されるとともに前記電圧電極対が設けられた伸縮可能な伸縮機構とを備え、
前記伸縮機構が伸縮することにより、前記基体から前記電圧電極対までの距離が変化して前記電圧電極対の位置が調整され、
前記伸縮機構は、前記第1の比と前記第2の比とが同じものになるように伸縮する
ことを特徴とする体組成測定装置。
【請求項7】
請求項6に記載の体組成測定装置において、
前記電圧電極対の位置を検出するセンサを備えている
ことを特徴とする体組成測定装置。
【請求項8】
請求項1〜7のいずれか一項に記載の体組成測定装置において、
腹囲を測定するためのセンサを備えている
ことを特徴とする体組成測定装置。
【請求項9】
請求項1〜8のいずれか一項に記載の体組成測定装置において、
前記調整機構は、前記電流電極対の位置を調整し、
前記電流電極対が前記第1の基準断面の外周に対応する位置にあるときの、前記第1の基準断面の外周の長さに対する前記第1の電流電極と前記第2の電流電極との距離の比を第3の比とし、
前記電流電極対が前記第2の基準断面の外周に対応する位置にあるときの、前記第2の基準断面の外周の長さに対する前記第1の電流電極と前記第2の電流電極との距離の比を第4の比としたときに、
前記調整機構は、前記第3の比と前記第4の比とが同じものになるように前記電流電極対の位置を調整する
ことを特徴とする体組成測定装置。
【請求項1】
第1の電流電極および第2の電流電極を含む電流電極対と、第1の電圧電極および第2の電圧電極を含む電圧電極対とを備える体組成測定装置において、
人体の所定部位を輪切りにしたときの同部位の断面を基準断面として、周囲の長さが異なって互いに相似する2つの基準断面を第1の基準断面および第2の基準断面とし、
前記電圧電極対の位置を調整する調整機構を備え、
前記電圧電極対が前記第1の基準断面の外周に対応する位置にあるときの、前記第1の基準断面の外周の長さに対する前記第1の電圧電極と前記第2の電圧電極との距離の比を第1の比とし、
前記電圧電極対が前記第2の基準断面の外周に対応する位置にあるときの、前記第2の基準断面の外周の長さに対する前記第1の電圧電極と前記第2の電圧電極との距離の比を第2の比としたときに、
前記調整機構は、前記第1の比と前記第2の比とが同じものになるように前記電圧電極対の位置を調整する
ことを特徴とする体組成測定装置。
【請求項2】
請求項1に記載の体組成測定装置において、
前記調整機構は、伸縮素材を含み、
前記伸縮素材が変形することにより、前記電圧電極対の位置が調整される
ことを特徴とする体組成測定装置。
【請求項3】
請求項2に記載の体組成測定装置において、
前記調整機構は、前記伸縮素材としてベルト状の形状記憶合金を備え、
前記基準断面のうち、周囲の長さが大きい断面を前記第1の基準断面とし、周囲の長さが小さい断面を前記第2の基準断面としたときに、
前記形状記憶合金に電流を印加することにより同形状記憶合金が変形して、この形状記憶合金を介して接続されている前記電圧電極対の位置が、前記第1の基準断面に対応する位置から前記第2の基準断面に対応する位置に変化する
ことを特徴とする体組成測定装置。
【請求項4】
請求項2に記載の体組成測定装置において、
前記調整機構は、前記伸縮素材として電場応答性ポリマーを備え、
前記基準断面のうち、周囲の長さが大きい断面を前記第1の基準断面とし、周囲の長さが小さい断面を前記第2の基準断面としたときに、
前記電場応答性ポリマーに電圧を印加することにより同電場応答性ポリマーが縮んで、この電場応答性ポリマーを介して接続されている前記電圧電極対の位置が、前記第1の基準断面に対応する位置から前記第2の基準断面に対応する位置に変化する
ことを特徴とする体組成測定装置。
【請求項5】
請求項2に記載の体組成測定装置において、
前記調整機構は、前記伸縮素材として伸縮性を有するチューブを備え、
前記基準断面のうち、周囲の長さが大きい断面を前記第1の基準断面とし、周囲の長さが小さい断面を前記第2の基準断面としたときに、
前記チューブ内に気体が注入されることにより同チューブが膨らんで、このチューブに設けられた前記電圧電極対の位置が、前記第1の基準断面に対応する位置から前記第2の基準断面に対応する位置に変化する
ことを特徴とする体組成測定装置。
【請求項6】
請求項1に記載の体組成測定装置において、
前記調整機構は、基体と、この基体に支持されるとともに前記電圧電極対が設けられた伸縮可能な伸縮機構とを備え、
前記伸縮機構が伸縮することにより、前記基体から前記電圧電極対までの距離が変化して前記電圧電極対の位置が調整され、
前記伸縮機構は、前記第1の比と前記第2の比とが同じものになるように伸縮する
ことを特徴とする体組成測定装置。
【請求項7】
請求項6に記載の体組成測定装置において、
前記電圧電極対の位置を検出するセンサを備えている
ことを特徴とする体組成測定装置。
【請求項8】
請求項1〜7のいずれか一項に記載の体組成測定装置において、
腹囲を測定するためのセンサを備えている
ことを特徴とする体組成測定装置。
【請求項9】
請求項1〜8のいずれか一項に記載の体組成測定装置において、
前記調整機構は、前記電流電極対の位置を調整し、
前記電流電極対が前記第1の基準断面の外周に対応する位置にあるときの、前記第1の基準断面の外周の長さに対する前記第1の電流電極と前記第2の電流電極との距離の比を第3の比とし、
前記電流電極対が前記第2の基準断面の外周に対応する位置にあるときの、前記第2の基準断面の外周の長さに対する前記第1の電流電極と前記第2の電流電極との距離の比を第4の比としたときに、
前記調整機構は、前記第3の比と前記第4の比とが同じものになるように前記電流電極対の位置を調整する
ことを特徴とする体組成測定装置。
【図1】



【図2】
【図3】

【図4】

【図5】
【図6】

【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】
【図14】
【図15】
【図16】

【図17】
【図18】
【図19】
【図20】
【図21】
【図22】

【図23】
【図24】
【図25】
【図26】

【図27】
【図28】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【公開番号】特開2012−115608(P2012−115608A)
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願番号】特願2010−270676(P2010−270676)
【出願日】平成22年12月3日(2010.12.3)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願日】平成22年12月3日(2010.12.3)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]