
作業ロボツトのツール先端位置ずれ補正装置
【目的】作業ロボットのツール先端位置のずれを高速で補正することにより作業効率の向上を図る。
【構成】イメージセンサ4の撮像結果からシーケンサ12でツール先端2aの目標経路からのずれが目標経路に対して垂直な1次元的なものとして求められる。そして、ツール2を揺動させる揺動量が上記ずれに比例した量として求められる。しかして、この揺動量に応じてモータ14が駆動され、ツール先端2aが同様に1次元的に移動して目標経路上に位置決めされる。
【構成】イメージセンサ4の撮像結果からシーケンサ12でツール先端2aの目標経路からのずれが目標経路に対して垂直な1次元的なものとして求められる。そして、ツール2を揺動させる揺動量が上記ずれに比例した量として求められる。しかして、この揺動量に応じてモータ14が駆動され、ツール先端2aが同様に1次元的に移動して目標経路上に位置決めされる。
【発明の詳細な説明】
【0001】
【産業上の利用分野】本発明は、作業に用いられるロボットのツールの先端がワーク上の目標経路からずれた場合にこれを補正する装置に関する。
【0002】
【従来の技術】いわゆるティーチング・プレイバック方式の作業用ロボットでは、ロボットハンドの先端にたとえばシーリング用のツール(シーリングガン)が取り付けられ、ロボット各軸をティーチングボックスによりリモート操作してツール先端をワーク上のシーリングすべき目標経路に沿って移動させるティーチングを行う。
【0003】プレイバック時にはティーチング結果に基づきロボット各軸を移動させるとともに、ツール先端位置の目標経路からのずれを所定のセンサで検出する。そしてこのセンサで検出されたずれ分に応じてツール先端が目標経路上に位置されるようロボット各軸をさらに駆動させる。つまり、ツール先端の位置ずれ分をロボット各軸の駆動量に変換する演算を行うことにより位置ずれを補正するようにしている。
【0004】
【発明が解決しようとする課題】しかし、各軸の駆動量を求める演算は複雑であり、演算処理に多大な時間を要する。加えて、各軸が駆動してツール先端が実際に移動するまで機械系の応答遅れがあり、多大な時間を要する。このように従来のものでは位置ずれが検出されてから実際に位置ずれが補正されるまでに多大な時間を要し、高速で補正することはできなく、補正を精度よく行うためには作業スピードをある程度抑えざるを得なかった。これはサイクルタイムの低下を意味し作業効率が損なわれることになる。
【0005】本発明はこうした実状に鑑みてなされたものであり、ツール先端位置の目標経路からの位置ずれを高速に補正することができ、作業効率を大幅に向上させることができる作業ロボットのツール先端位置ずれ補正装置を提供することをその目的としている。
【0006】
【課題を解決するための手段】そこで、この発明では、ロボット各軸を駆動することによりロボットハンド先端に取り付けられたツールの先端をワーク上の目標経路に沿って移動させ、作業を行う作業ロボットにおいて、前記ツール先端を揺動させるツール揺動手段と、前記ロボットハンドに固設され、前記ツールの揺動方向に沿ったワーク表面を撮像する撮像手段とを具え、ティーチング時には、前記ツールの揺動方向が前記ワーク上の目標経路に対して垂直となり、かつ前記目標経路が前記撮像手段の撮像視野内の基準位置に位置されるように前記ロボットハンドに対する前記ツールの姿勢を固定した状態で前記ツール先端を前記目標経路に沿って移動させるとともに、プレイバック時には、前記撮像手段で前記目標経路を撮像し、この撮像視野内の目標経路を示す位置と前記基準位置との偏差に応じて前記ツール先端を前記目標経路に位置させるツール揺動量を求め、該揺動量だけ前記ツール揺動手段を作動させ前記ツール先端を前記目標経路に位置させるようにしている。
【0007】
【作用】かかる構成によれば、撮像視野内の目標経路を示す位置と基準位置との偏差は、ツール先端の目標経路からの位置ずれに対応しているため、偏差に応じてツール先端を目標経路に位置させるツール揺動量が求められる。ここで偏差と揺動量は単純な比例関係にあるため揺動量は複雑な演算処理を行うことなく短時間で求められる。また、求めた揺動量だけツール揺動手段が作動してツール先端が目標経路に位置される。ここで、ツール揺動手段は一方向に揺動するだけの単純な機構であるため機械的な応答遅れが少なく短時間でツール先端が移動する。このようにロボット各軸駆動制御系とは独立した、単純な動きの機構を単純な演算に基づき駆動制御するようにしたのでツール先端位置の目標経路からのずれが高速で補正される。
【0008】
【実施例】以下、図面を参照して本発明に係る作業ロボットのツール先端位置ずれ補正装置の実施例について説明する。
【0009】なお、実施例では、シーリング作業を行う多関節の作業ロボットを想定しており、かかる作業ロボットはいわゆるティーチング・プレイバック方式によって駆動制御されるものとする。なお、多関節ロボットおよびティーチング・プレイバック方式は公知の技術であるのでそれについての詳細な説明は省略する。
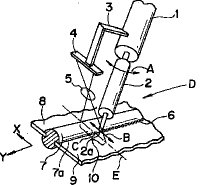
【0010】図2は実施例に適用される作業ロボットがゴム部材7のシーリング作業を行っている様子を斜視図にて示したものである。
【0011】同図に示すように作業対象であるワークはガラス板8と鉄板9とをゴム部材7を介して接続したものであり、ゴム部材7と鉄板9との境界線7aをシーリングすべき目標経路としてシーリングする。すなわち、作業ロボットのハンド1の先端にはシーリングガン(以下、ツールという)2の一端が当該ツール2が1次元方向Aに揺動自在となるよう取り付けられている。かかる揺動機構は、後述するようステッピングモータ14(図1R>1)により駆動される。この結果、ツール2の先端2aはワークの表面上をBに示すように一次元的に揺動する。なお、ハンド1はロボットのアーム先端に取り付けられており、ロボットの各回動軸のうち先端最終軸により駆動される。
【0012】一方、ハンド1にはブラケット3を介してイメージセンサ(たとえばCCDカメラが使用される)4が固設されている。このイメージセンサ4には、ツール先端2aが揺動する方向Bと同一方向であるEに沿って撮像素子が配列されており、ワーク表面の同方向に沿った部分をレンズ5を介して撮像視野10内に取り込み撮像する。ここで、イメージセンサ4は、ハンド1の長手方向とツール2の長手方向とが平行となるようなツール姿勢にされた場合には、ツール先端2aの位置がイメージセンサ4の撮像視野10の中心基準位置CとX軸成分上一致するように調整されている。
【0013】よって、いま、ツール2を上記姿勢状態にしたままでロボット各軸を駆動してツール先端2aを矢印Dに示すようY軸方向に境界線7aに沿って移動させると、6に示すように境界線7aがシーリングされる。これとともに、ツール先端2aは境界線7aに対して垂直な方向Xに揺動可能な状態となる。そして、イメージセンサ4はツール先端2aの位置を視野内基準位置Cとして、境界線7aに対して垂直な方向に沿ったワーク表面を撮像視野10内に取り込み撮像する。
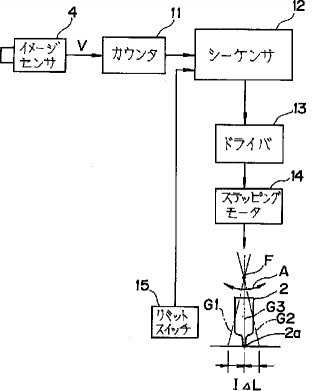
【0014】さて、図1は実施例の制御系をブロック図にて示したものであり、上記ツール2の揺動機構を駆動するステッピングモータ14を制御する装置の構成を示している。
【0015】同図に示すようにイメージセンサ4では、撮像視野10内の画像を示す画像データがA/D変換され、所定のしきい値により明・暗の2階調に2値化される。そして2値化された画像データはフレームメモリに入力され、該メモリに上記撮像視野10内の画像を示す複数の画素が記憶される。イメージセンサ4からはツール先端2aの揺動方向に沿った1列の画素が順次明・暗の2値化信号Vとして出力される。
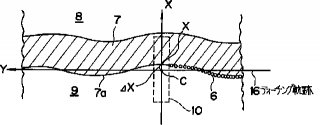
【0016】カウンタ11はたとえば8ビットのバイナリカウンタであり、上記2値化信号Vの明信号を示すパルスをカウントするものである。ここで図3に示すように鉄板9の部分が‘明’状態、ゴム部材7の部分の‘暗’状態であるとすると上記明信号のパルス数をカウントすることにより撮像視野10の基準位置Cから境界線7aまでの距離Δxを計測することができる。カウンタ11からは基準位置Cから境界線7aまでの距離Δxを示すカウント値が出力され、シーケンサ12の入力ポートに加えられる。
【0017】一方、ツール2の揺動機構にはツール先端2aの各位置を検出するリミットスイッチ15が配設されている。すなわち、ツール2は、回動支点Fを回動中心にして先端2aがプラス・マイナスΔLの範囲で揺動する。リミットスイッチ15ではツール先端2aが最大位置ΔLまで振れた状態G1、G2で、最大位置±ΔLを示す検出信号を出力する。これとともにリミットスイッチ15はツール先端2aの原点位置、つまりツール2の長手方向がハンド1の長手方向と平行になる状態G3を検出し、原点位置を示す検出信号を出力する。
【0018】シーケンサ12はいわゆるPLC(プログラマブル・ロジック・コントローラ)であり、上記カウント値およびリミットスイッチ15の各検出信号に基づきモータ14を駆動するドライバ13を制御するための制御信号を作成して、ドライバに出力する。すなわち、図3においてツール先端2aが基準位置Cを通るY軸上にあり、カウンタ11のカウント値からX軸方向の距離Δxがデコードされれば、シーリング作業を精度よく行うためにはツール先端2aをX軸方向にΔxだけ移動させて境界線7a上の位置Xに位置させる必要がある。
【0019】そこで、シーケンサ12からはツール先端2aを上記距離Δxだけ揺動させるための制御信号がドライバ13に対して出力され、ドライバ13は入力された制御信号に基づき距離Δxに応じたパルス数の電流をモータ14に出力する。
【0020】モータ14は入力されたパルス数だけ回転位置が変化して、この回転に応じてツール2を揺動させ、先端2aを距離Δxだけ基準位置CからX軸方向に移動させる。なお、シーケンサ12では、リミットスイッチ15の各検出信号が位置フィードバック量として用いられツール先端2aの現在のX軸方向位置が求められ、これを基準にして制御信号を作成する。
【0021】・ティーチング時オペレータは、実際のシーリング作業を行う前に予めツール先端2aが移動すべき軌跡をロボットにティーチングする操作を行う。
【0022】すなわち、ツール2を上述した姿勢に固定した状態でロボット各軸をティーチングボックスによりリモート操作して、ツール先端2aをワーク上の境界線7aに沿って矢印Dに示すよう移動させる。ティーチング時においてはワークは正確に据え付けられており、境界線7aは完全な直線であるものとしている。この結果、図3に示すようにツール先端2aはY軸に沿って移動して軌跡16が教示される。
【0023】・プレイバック時つぎに上記ティーチングされた内容をプレイバックする操作が行われる。
【0024】すなわち、ティーチング時と同じようにロボット各軸が駆動され、ツール先端2aは矢印D方向にワーク上を移動する。
【0025】しかし、ワークの据え付け誤差、ゴム部材7の形状のばらつき等に起因して実際のワークでは図3に示すように境界線7aがY軸で示されるティーチング軌跡16からずれてしまう。
【0026】イメージセンサ4ではツール先端2aが揺動する方向Xのワーク表面を撮像視野10内に捕捉しており、シーケンサ12ではカウンタ11のカウント結果に基づきX軸上における境界線7aと基準点Cとの偏差Δxが求められる。ここで、ツール先端2aは基準点Cを通るY軸上に位置しているので、上記偏差Δxに比例した揺動量を求め、この揺動量だけ揺動機構を駆動するための制御信号をドライバ13に出力し、ドライバ13、モータ14を介してツール2を上記揺動量だけ揺動させれば、ツール先端2aはΔxだけ移動して境界線7a上の位置Xに位置決めされる。このように先端位置ずれ分Δxが逐次補正されることにより境界線7aに沿ったシーリングが正確に行われる。しかも、撮像結果から1次元の偏差Δxを求め、これに比例したツール揺動量を演算する処理は単純であり、高速演算が可能である。しかもツール先端2aが1次元的に揺動する単純な機構を駆動制御するだけでよいので高速に駆動する。このため、位置ずれ補正が高速に行われ、サイクルタイムが短縮され、作業効率が向上する。
【0027】
【発明の効果】以上説明したように本発明によれば高速で位置ずれ補正がなされるので、作業ロボットによる作業効率が飛躍的に向上する。
【図面の簡単な説明】
【図1】図1は本発明に係る作業ロボットのツール先端位置ずれ補正装置の実施例の構成を示すブロック図である。
【図2】図2は実施例の外観を示す斜視図である。
【図3】図3は実施例の演算処理を説明するために用いた図である。
【符号の説明】
1 ハンド
2 ツール
2a ツール先端
4 イメージセンサ
7a 境界線
11 カウンタ
12 シーケンサ
13 ドライバ
14 ステッピングモータ
【0001】
【産業上の利用分野】本発明は、作業に用いられるロボットのツールの先端がワーク上の目標経路からずれた場合にこれを補正する装置に関する。
【0002】
【従来の技術】いわゆるティーチング・プレイバック方式の作業用ロボットでは、ロボットハンドの先端にたとえばシーリング用のツール(シーリングガン)が取り付けられ、ロボット各軸をティーチングボックスによりリモート操作してツール先端をワーク上のシーリングすべき目標経路に沿って移動させるティーチングを行う。
【0003】プレイバック時にはティーチング結果に基づきロボット各軸を移動させるとともに、ツール先端位置の目標経路からのずれを所定のセンサで検出する。そしてこのセンサで検出されたずれ分に応じてツール先端が目標経路上に位置されるようロボット各軸をさらに駆動させる。つまり、ツール先端の位置ずれ分をロボット各軸の駆動量に変換する演算を行うことにより位置ずれを補正するようにしている。
【0004】
【発明が解決しようとする課題】しかし、各軸の駆動量を求める演算は複雑であり、演算処理に多大な時間を要する。加えて、各軸が駆動してツール先端が実際に移動するまで機械系の応答遅れがあり、多大な時間を要する。このように従来のものでは位置ずれが検出されてから実際に位置ずれが補正されるまでに多大な時間を要し、高速で補正することはできなく、補正を精度よく行うためには作業スピードをある程度抑えざるを得なかった。これはサイクルタイムの低下を意味し作業効率が損なわれることになる。
【0005】本発明はこうした実状に鑑みてなされたものであり、ツール先端位置の目標経路からの位置ずれを高速に補正することができ、作業効率を大幅に向上させることができる作業ロボットのツール先端位置ずれ補正装置を提供することをその目的としている。
【0006】
【課題を解決するための手段】そこで、この発明では、ロボット各軸を駆動することによりロボットハンド先端に取り付けられたツールの先端をワーク上の目標経路に沿って移動させ、作業を行う作業ロボットにおいて、前記ツール先端を揺動させるツール揺動手段と、前記ロボットハンドに固設され、前記ツールの揺動方向に沿ったワーク表面を撮像する撮像手段とを具え、ティーチング時には、前記ツールの揺動方向が前記ワーク上の目標経路に対して垂直となり、かつ前記目標経路が前記撮像手段の撮像視野内の基準位置に位置されるように前記ロボットハンドに対する前記ツールの姿勢を固定した状態で前記ツール先端を前記目標経路に沿って移動させるとともに、プレイバック時には、前記撮像手段で前記目標経路を撮像し、この撮像視野内の目標経路を示す位置と前記基準位置との偏差に応じて前記ツール先端を前記目標経路に位置させるツール揺動量を求め、該揺動量だけ前記ツール揺動手段を作動させ前記ツール先端を前記目標経路に位置させるようにしている。
【0007】
【作用】かかる構成によれば、撮像視野内の目標経路を示す位置と基準位置との偏差は、ツール先端の目標経路からの位置ずれに対応しているため、偏差に応じてツール先端を目標経路に位置させるツール揺動量が求められる。ここで偏差と揺動量は単純な比例関係にあるため揺動量は複雑な演算処理を行うことなく短時間で求められる。また、求めた揺動量だけツール揺動手段が作動してツール先端が目標経路に位置される。ここで、ツール揺動手段は一方向に揺動するだけの単純な機構であるため機械的な応答遅れが少なく短時間でツール先端が移動する。このようにロボット各軸駆動制御系とは独立した、単純な動きの機構を単純な演算に基づき駆動制御するようにしたのでツール先端位置の目標経路からのずれが高速で補正される。
【0008】
【実施例】以下、図面を参照して本発明に係る作業ロボットのツール先端位置ずれ補正装置の実施例について説明する。
【0009】なお、実施例では、シーリング作業を行う多関節の作業ロボットを想定しており、かかる作業ロボットはいわゆるティーチング・プレイバック方式によって駆動制御されるものとする。なお、多関節ロボットおよびティーチング・プレイバック方式は公知の技術であるのでそれについての詳細な説明は省略する。
【0010】図2は実施例に適用される作業ロボットがゴム部材7のシーリング作業を行っている様子を斜視図にて示したものである。
【0011】同図に示すように作業対象であるワークはガラス板8と鉄板9とをゴム部材7を介して接続したものであり、ゴム部材7と鉄板9との境界線7aをシーリングすべき目標経路としてシーリングする。すなわち、作業ロボットのハンド1の先端にはシーリングガン(以下、ツールという)2の一端が当該ツール2が1次元方向Aに揺動自在となるよう取り付けられている。かかる揺動機構は、後述するようステッピングモータ14(図1R>1)により駆動される。この結果、ツール2の先端2aはワークの表面上をBに示すように一次元的に揺動する。なお、ハンド1はロボットのアーム先端に取り付けられており、ロボットの各回動軸のうち先端最終軸により駆動される。
【0012】一方、ハンド1にはブラケット3を介してイメージセンサ(たとえばCCDカメラが使用される)4が固設されている。このイメージセンサ4には、ツール先端2aが揺動する方向Bと同一方向であるEに沿って撮像素子が配列されており、ワーク表面の同方向に沿った部分をレンズ5を介して撮像視野10内に取り込み撮像する。ここで、イメージセンサ4は、ハンド1の長手方向とツール2の長手方向とが平行となるようなツール姿勢にされた場合には、ツール先端2aの位置がイメージセンサ4の撮像視野10の中心基準位置CとX軸成分上一致するように調整されている。
【0013】よって、いま、ツール2を上記姿勢状態にしたままでロボット各軸を駆動してツール先端2aを矢印Dに示すようY軸方向に境界線7aに沿って移動させると、6に示すように境界線7aがシーリングされる。これとともに、ツール先端2aは境界線7aに対して垂直な方向Xに揺動可能な状態となる。そして、イメージセンサ4はツール先端2aの位置を視野内基準位置Cとして、境界線7aに対して垂直な方向に沿ったワーク表面を撮像視野10内に取り込み撮像する。
【0014】さて、図1は実施例の制御系をブロック図にて示したものであり、上記ツール2の揺動機構を駆動するステッピングモータ14を制御する装置の構成を示している。
【0015】同図に示すようにイメージセンサ4では、撮像視野10内の画像を示す画像データがA/D変換され、所定のしきい値により明・暗の2階調に2値化される。そして2値化された画像データはフレームメモリに入力され、該メモリに上記撮像視野10内の画像を示す複数の画素が記憶される。イメージセンサ4からはツール先端2aの揺動方向に沿った1列の画素が順次明・暗の2値化信号Vとして出力される。
【0016】カウンタ11はたとえば8ビットのバイナリカウンタであり、上記2値化信号Vの明信号を示すパルスをカウントするものである。ここで図3に示すように鉄板9の部分が‘明’状態、ゴム部材7の部分の‘暗’状態であるとすると上記明信号のパルス数をカウントすることにより撮像視野10の基準位置Cから境界線7aまでの距離Δxを計測することができる。カウンタ11からは基準位置Cから境界線7aまでの距離Δxを示すカウント値が出力され、シーケンサ12の入力ポートに加えられる。
【0017】一方、ツール2の揺動機構にはツール先端2aの各位置を検出するリミットスイッチ15が配設されている。すなわち、ツール2は、回動支点Fを回動中心にして先端2aがプラス・マイナスΔLの範囲で揺動する。リミットスイッチ15ではツール先端2aが最大位置ΔLまで振れた状態G1、G2で、最大位置±ΔLを示す検出信号を出力する。これとともにリミットスイッチ15はツール先端2aの原点位置、つまりツール2の長手方向がハンド1の長手方向と平行になる状態G3を検出し、原点位置を示す検出信号を出力する。
【0018】シーケンサ12はいわゆるPLC(プログラマブル・ロジック・コントローラ)であり、上記カウント値およびリミットスイッチ15の各検出信号に基づきモータ14を駆動するドライバ13を制御するための制御信号を作成して、ドライバに出力する。すなわち、図3においてツール先端2aが基準位置Cを通るY軸上にあり、カウンタ11のカウント値からX軸方向の距離Δxがデコードされれば、シーリング作業を精度よく行うためにはツール先端2aをX軸方向にΔxだけ移動させて境界線7a上の位置Xに位置させる必要がある。
【0019】そこで、シーケンサ12からはツール先端2aを上記距離Δxだけ揺動させるための制御信号がドライバ13に対して出力され、ドライバ13は入力された制御信号に基づき距離Δxに応じたパルス数の電流をモータ14に出力する。
【0020】モータ14は入力されたパルス数だけ回転位置が変化して、この回転に応じてツール2を揺動させ、先端2aを距離Δxだけ基準位置CからX軸方向に移動させる。なお、シーケンサ12では、リミットスイッチ15の各検出信号が位置フィードバック量として用いられツール先端2aの現在のX軸方向位置が求められ、これを基準にして制御信号を作成する。
【0021】・ティーチング時オペレータは、実際のシーリング作業を行う前に予めツール先端2aが移動すべき軌跡をロボットにティーチングする操作を行う。
【0022】すなわち、ツール2を上述した姿勢に固定した状態でロボット各軸をティーチングボックスによりリモート操作して、ツール先端2aをワーク上の境界線7aに沿って矢印Dに示すよう移動させる。ティーチング時においてはワークは正確に据え付けられており、境界線7aは完全な直線であるものとしている。この結果、図3に示すようにツール先端2aはY軸に沿って移動して軌跡16が教示される。
【0023】・プレイバック時つぎに上記ティーチングされた内容をプレイバックする操作が行われる。
【0024】すなわち、ティーチング時と同じようにロボット各軸が駆動され、ツール先端2aは矢印D方向にワーク上を移動する。
【0025】しかし、ワークの据え付け誤差、ゴム部材7の形状のばらつき等に起因して実際のワークでは図3に示すように境界線7aがY軸で示されるティーチング軌跡16からずれてしまう。
【0026】イメージセンサ4ではツール先端2aが揺動する方向Xのワーク表面を撮像視野10内に捕捉しており、シーケンサ12ではカウンタ11のカウント結果に基づきX軸上における境界線7aと基準点Cとの偏差Δxが求められる。ここで、ツール先端2aは基準点Cを通るY軸上に位置しているので、上記偏差Δxに比例した揺動量を求め、この揺動量だけ揺動機構を駆動するための制御信号をドライバ13に出力し、ドライバ13、モータ14を介してツール2を上記揺動量だけ揺動させれば、ツール先端2aはΔxだけ移動して境界線7a上の位置Xに位置決めされる。このように先端位置ずれ分Δxが逐次補正されることにより境界線7aに沿ったシーリングが正確に行われる。しかも、撮像結果から1次元の偏差Δxを求め、これに比例したツール揺動量を演算する処理は単純であり、高速演算が可能である。しかもツール先端2aが1次元的に揺動する単純な機構を駆動制御するだけでよいので高速に駆動する。このため、位置ずれ補正が高速に行われ、サイクルタイムが短縮され、作業効率が向上する。
【0027】
【発明の効果】以上説明したように本発明によれば高速で位置ずれ補正がなされるので、作業ロボットによる作業効率が飛躍的に向上する。
【図面の簡単な説明】
【図1】図1は本発明に係る作業ロボットのツール先端位置ずれ補正装置の実施例の構成を示すブロック図である。
【図2】図2は実施例の外観を示す斜視図である。
【図3】図3は実施例の演算処理を説明するために用いた図である。
【符号の説明】
1 ハンド
2 ツール
2a ツール先端
4 イメージセンサ
7a 境界線
11 カウンタ
12 シーケンサ
13 ドライバ
14 ステッピングモータ
【特許請求の範囲】
【請求項1】 ロボット各軸を駆動することによりロボットハンド先端に取り付けられたツールの先端をワーク上の目標経路に沿って移動させ、作業を行う作業ロボットにおいて、前記ツールの先端を揺動させるツール揺動手段と、前記ロボットハンドに固設され、前記ツールの揺動方向に沿ったワーク表面を撮像する撮像手段とを具え、ティーチング時には、前記ツールの揺動方向が前記ワーク上の目標経路に対して垂直となり、かつ前記目標経路が前記撮像手段の撮像視野内の基準位置に位置されるように前記ロボットハンドに対する前記ツールの姿勢を固定した状態で前記ツール先端を前記目標経路に沿って移動させるとともに、プレイバック時には、前記撮像手段で前記目標経路を撮像し、この撮像視野内の目標経路を示す位置と前記基準位置との偏差に応じて前記ツール先端を前記目標経路に位置させるツール揺動量を求め、該揺動量だけ前記ツール揺動手段を作動させ前記ツール先端を前記目標経路に位置させるようにした作業ロボットのツール先端位置ずれ補正装置。
【請求項1】 ロボット各軸を駆動することによりロボットハンド先端に取り付けられたツールの先端をワーク上の目標経路に沿って移動させ、作業を行う作業ロボットにおいて、前記ツールの先端を揺動させるツール揺動手段と、前記ロボットハンドに固設され、前記ツールの揺動方向に沿ったワーク表面を撮像する撮像手段とを具え、ティーチング時には、前記ツールの揺動方向が前記ワーク上の目標経路に対して垂直となり、かつ前記目標経路が前記撮像手段の撮像視野内の基準位置に位置されるように前記ロボットハンドに対する前記ツールの姿勢を固定した状態で前記ツール先端を前記目標経路に沿って移動させるとともに、プレイバック時には、前記撮像手段で前記目標経路を撮像し、この撮像視野内の目標経路を示す位置と前記基準位置との偏差に応じて前記ツール先端を前記目標経路に位置させるツール揺動量を求め、該揺動量だけ前記ツール揺動手段を作動させ前記ツール先端を前記目標経路に位置させるようにした作業ロボットのツール先端位置ずれ補正装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開平5−143150
【公開日】平成5年(1993)6月11日
【国際特許分類】
【出願番号】特願平3−307916
【出願日】平成3年(1991)11月22日
【出願人】(000001236)株式会社小松製作所 (1,686)
【公開日】平成5年(1993)6月11日
【国際特許分類】
【出願日】平成3年(1991)11月22日
【出願人】(000001236)株式会社小松製作所 (1,686)
[ Back to top ]