
作業分析支援システム
【課題】作業者に負担をかけることなしに作業に関する正しい情報を収集する。
【解決手段】作業者が作業対象物(箱)を手で持つと、作業者の身体(手首)に取り付けられている端末装置1と当該作業対象物(箱)に取り付けられている応答器2とが交信可能範囲にまで接近し、端末装置1によって応答器2に記憶している情報(データ)が読み取られる。故に、作業者が本来の作業以外の行動を行わなくとも、作業者の身体に装着される端末装置1の質問器が作業対象物に設置される応答器2から当該作業対象物に関する情報を自動的に読み取り、時計部13で計時する時刻と前記情報を対応付けて出力インタフェース部14から外部に出力することができるので、作業者に負担をかけることなしに作業に関する正しい情報を収集することができる。
【解決手段】作業者が作業対象物(箱)を手で持つと、作業者の身体(手首)に取り付けられている端末装置1と当該作業対象物(箱)に取り付けられている応答器2とが交信可能範囲にまで接近し、端末装置1によって応答器2に記憶している情報(データ)が読み取られる。故に、作業者が本来の作業以外の行動を行わなくとも、作業者の身体に装着される端末装置1の質問器が作業対象物に設置される応答器2から当該作業対象物に関する情報を自動的に読み取り、時計部13で計時する時刻と前記情報を対応付けて出力インタフェース部14から外部に出力することができるので、作業者に負担をかけることなしに作業に関する正しい情報を収集することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、工場や倉庫などの作業場で作業者が行う作業の作業分析を支援する作業分析支援システムに関するものである。
【背景技術】
【0002】
従来の作業分析支援システムとして、作業者が所持するハンディターミナルに作業者自身が作業に関する操作入力を行い、当該ハンディターミナルが作業者の入力操作に従って各作業に対応した作業開始時刻と作業終了時刻とを検出し、その際に取得した時間データを記憶するとともに記憶した時間データをパソコンに出力し、当該パソコンにおいて当該時間データに基づいて、作業者が行った作業毎の作業時間を集計し、分析するものが提案されている(特許文献1参照)。
【0003】
また、別の従来システムとして、作業者が所持するハンディターミナルによって作業コード表から各作業に対応するバーコードを読み取り、読み取ったバーコードデータおよび読み取り時刻を通信手段を介してパーソナルコンピュータに送信し、当該パーソナルコンピュータにおいて、先のバーコードの読み取り時から後のバーコードの読み取り時までの間を各作業に要した作業時間として算出するとともに、算出したデータを集計し、所定の表ないしグラフを自動作成するものが提案されている(特許文献2参照)。
【特許文献1】特開2002−170140号公報
【特許文献2】特開平7−65076号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1,2に記載されている従来例では、作業者に対して分析対象の本来の作業以外の作業、すなわち、ハンディターミナルへの入力操作やハンディターミナルによるバーコードの読み取りなどの作業を行わせる必要があるため、作業者に余計な負担をかけてしまったり、あるいは前記入力操作やバーコードの読み取りなどを作業者が忘れてしまうことで正しいデータ(情報)を収集できない虞がある。
【0005】
本発明は上記事情に鑑みて為されたものであり、その目的は、作業者に負担をかけることなしに作業に関する正しい情報を収集することができる作業分析支援システムを提供することにある。
【課題を解決するための手段】
【0006】
請求項1の発明は、上記目的を達成するために、作業対象物に設置される1乃至複数の応答器と、当該応答器から作業対象物に関する情報を読み取る質問器を具備して作業者の身体に装着される端末装置とを備え、端末装置は、前記質問器と、作業者に関する個人情報を記憶した記憶手段と、時刻を計時する時計手段と、質問器で読み取られた作業対象物に関する情報と質問器が応答器から当該情報を読み取った時刻並びに記憶手段に記憶している個人情報を外部に出力する出力手段とを具備することを特徴とする。
【0007】
請求項1の発明によれば、作業者が本来の作業以外の行動を行わなくとも、作業者の身体に装着される端末装置の質問器が作業対象物に設置される応答器から当該作業対象物に関する情報を自動的に読み取り、端末装置が具備する時計手段で計時する時刻と前記情報を対応付けて出力手段から外部に出力することができる。その結果、作業者に負担をかけることなしに作業に関する正しい情報を収集することができる。
【0008】
請求項2の発明は、請求項1の発明において、端末装置は、加速度を検出する加速度検出手段を具備し、加速度検出手段で検出される加速度及び検出された時刻を含む動作情報が出力手段から出力されることを特徴とする。
【0009】
請求項2の発明によれば、加速度検出手段で加速度が検出されているか否かによって作業者が作業を行っていること(時刻)と作業を行っていないこと(時刻)を判別することができる。
【0010】
請求項3の発明は、請求項2の発明において、前記加速度検出手段は、作業者の腕若しくは手指に取り付けられる第1の加速度センサと、当該作業者の胴体に取り付けられる第2の加速度センサとを有することを特徴とする。
【0011】
請求項3の発明によれば、第1の加速度センサのみで加速度が検出されていれば作業者が立ち止まって(停止して)作業していると判断でき、第1の加速度センサが検出する加速度と第2の加速度センサが検出する加速度が等しければ作業者が移動していると判断でき、第1の加速度センサが検出する加速度と第2の加速度センサが検出する加速度が異なれば作業者が移動しながら作業していると判断できる。
【0012】
請求項4の発明は、請求項1〜3の何れか1項の発明において、作業者が作業中に移動する作業空間内の適所に設置される複数の位置情報教示装置を備え、端末装置の出力手段は、前記位置情報教示装置から教示される位置情報と当該位置情報が教示された時刻を含む移動情報を出力することを特徴とする。
【0013】
請求項4の発明によれば、移動情報に含まれる位置情報と当該位置情報が教示された時刻とに基づいて作業者の移動距離や移動速度を把握することができる。
【0014】
請求項5の発明は、請求項1〜4の何れか1項の発明において、作業対象物は、可倒式の操作レバーを有し当該操作レバーが操作されることで移動及び停止する台車からなり、操作レバーは、複数の応答器が配設されるとともに作業者の手で把持される把持部と、一端に把持部が設けられるとともに他端が支持された支持体とを有し、複数の応答器は、把持部に対して操作レバーの操作方向に沿って互いに離間して配設されることを特徴とする。
【0015】
請求項5の発明によれば、複数の応答器のうちで何れの応答器から情報が読み取られたかによって作業内容を判別することができる。
【0016】
請求項6の発明は、請求項5の発明において、操作レバーは、中立点を挟んで互いに異なる向きに操作されるものであって、当該中立点に対応する位置と、異なる操作向きのそれぞれに対応する複数の位置とにそれぞれ応答器が配設されることを特徴とする。
【0017】
請求項6の発明によれば、台車を使った作業内容の詳細を分析することができる。
【0018】
請求項7の発明は、請求項5の発明において、作業対象物は、操作レバーの操作量が大きくなるに従って移動速度が増大する台車であることを特徴とする。
【0019】
請求項7の発明によれば、台車の移動速度を判別することができる。
【発明の効果】
【0020】
本発明によれば、作業者に負担をかけることなしに作業に関する正しい情報を収集することができる。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照して本発明の実施形態を詳細に説明する。
【0022】
(実施形態1)
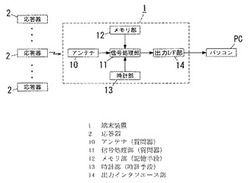
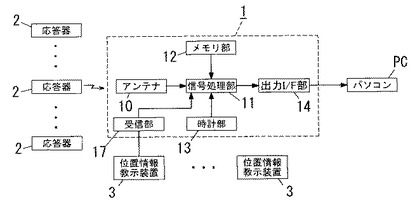
本実施形態の作業分析支援システムは、図1に示すように作業対象物に設置される複数の応答器2と、各応答器2から作業対象物に関する情報を読み取る質問器を具備して作業者の身体に装着される端末装置1とを備える。
【0023】
応答器2は、データキャリア若しくはIDタグとも呼ばれ、内蔵する半導体メモリに予め記憶されている情報(データ)が電波や電磁波あるいは光(赤外光)などの媒体を介して非接触で読み取られるものである。尚、このような応答器2の構成については従来周知であるから詳細な構成の図示並びに説明は省略する。
【0024】
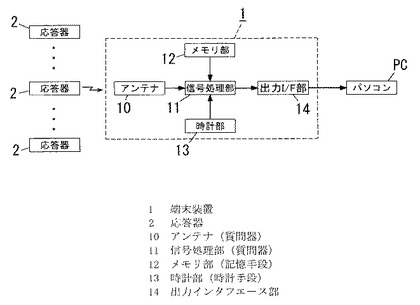
端末装置1は、応答器2との間で電波あるいは電磁波で交信するためのアンテナ10と、アンテナ10から送受信する信号を信号処理する信号処理部11と、不揮発性の半導体メモリからなるメモリ部12と、時刻を計時する時計部13と、信号処理部11と外部の作業分析装置(パーソナル・コンピュータ<以下、「パソコン」と略す。>)PCとをインタフェースする出力インタフェース部14とを具備し、リストバンドなどを用いて作業者の手首に取り付けられる。またメモリ部12には作業者の個人情報(氏名及び所属部署など)が予め記憶されている。尚、本実施形態ではアンテナ10と信号処理部11とで質問器(リーダ/ライタとも呼ばれる)が構成され、さらに応答器2と質問器とでデータキャリアシステムが構成される。但し、このような質問器(アンテナ10と信号処理部11)並びにデータキャリアシステムについては従来周知であるから(例えば、日本工業規格JIS X0500 データキャリア用語等参照)、詳細な構成についての図示並びに説明は省略する。
【0025】
作業分析装置たるパソコンPCは、端末装置1の出力インタフェース部14より出力される情報(データ)を有線又は無線で取り込み、取り込んだ情報を分析する処理、例えば、作業者毎の作業時間等の集計やグラフ化などを行うためのプログラムを実行する。
【0026】
複数の応答器2はそれぞれ作業対象物、例えば、作業者が手持ちで運搬する箱(図示せず)などに取り付けられるとともに、各作業対象物に関する情報(作業対象物の種類や識別番号など)を記憶している。従って、作業者が作業対象物(箱)を手で持つと、作業者の身体(手首)に取り付けられている端末装置1と当該作業対象物(箱)に取り付けられている応答器2とが交信可能範囲(例えば、数センチメートル)にまで接近し、端末装置1によって応答器2に記憶している情報(データ)が読み取られる。
【0027】
端末装置1の信号処理部11は、応答器2から情報(データ)を読み取った時点の時刻を時計部13から取得し、当該情報と時刻並びにメモリ部12から読み出した作業者の個人情報からなる作業情報を出力インタフェース部14よりパソコンPCに出力する。但し、応答器2から読み取った情報と時刻をメモリ部12に一旦記憶しておき、後で一括して出力インタフェース部14よりパソコンPCに出力するようにしても構わない。特に、出力インタフェース部14が無線通信によってパソコンPCにデータを伝送する場合は前者、出力インタフェース部14が有線通信によってパソコンPCにデータを伝送する場合は後者が望ましい。
【0028】
而して本実施形態によれば、作業者が本来の作業以外の行動、例えば、特許文献1に記載されている従来例のようなハンディターミナルに対する入力操作や、特許文献2に記載されているようなハンディターミナルによるバーコードの読み取り操作などを行わなくとも、作業者の身体に装着される端末装置1の質問器が作業対象物に設置される応答器2から当該作業対象物に関する情報を自動的に読み取り、時計部13で計時する時刻と前記情報を対応付けて出力インタフェース部14から外部に出力することができるので、作業者に負担をかけることなしに作業に関する正しい情報を収集することができる。尚、端末装置1の質問器は交信可能範囲内に存在する応答器2のみから情報(データ)を読み取るので、実際に作業が行われていない作業対象物の応答器2から情報(データ)が誤って読み取られる虞は殆ど無い。
【0029】
(実施形態2)
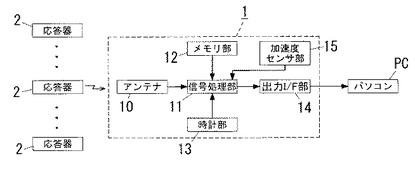
本実施形態の作業分析支援システムは、図2に示すように加速度を検出する加速度センサ部15を具備している点に特徴があり、その他の構成は実施形態1と共通である。よって、実施形態1と共通の構成要素には同一の符号を付して説明を省略する。
【0030】
加速度センサ部15は、加速度の大きさに対応した検出信号(加速度データ)を信号処理部11に出力する。端末装置1の信号処理部11は、加速度センサ部15から出力された加速度データを時計部13で計時する時刻とメモリ部12から読み出した個人情報とともに出力インタフェース部14よりパソコンPCに出力する。このとき、端末装置1の信号処理部11が応答器2から情報(データ)を読み取ることができていれば、応答器2から読み取った情報も合わせて出力インタフェース部14よりパソコンPCに出力する。
【0031】
而して本実施形態によれば、加速度センサ部15で検出する加速度データに基づいて作業者が作業を行っていること(時刻)と作業を行っていないこと(時刻)を判別することができる。尚、このような判別は、作業分析装置であるパソコンPCによって行われる。
【0032】
(実施形態3)
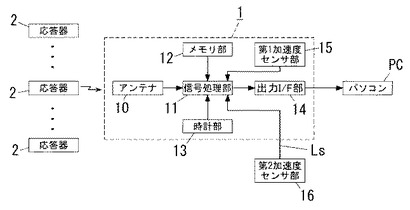
本実施形態の作業分析支援システムは、図3に示すように端末装置1に内蔵された第1加速度センサ部15の他に、作業者の胴体に装着される第2加速度センサ部16を具備している点に特徴があり、その他の構成は実施形態2と共通である。よって、実施形態2と共通の構成要素には同一の符号を付して説明を省略する。
【0033】
第2加速度センサ部16は、例えば、作業者が着用しているベルトに取り付けられ、第1加速度センサ部15と同様に加速度の大きさに対応した検出信号(加速度データ)を信号線Lsを介して信号処理部11に出力するものである。但し、第2加速度センサ部16が直接パソコンPCに加速度データを出力するようにしても構わない。
【0034】
端末装置1の信号処理部11は、第1加速度センサ部15から出力された加速度データ並びに第2加速度センサ部16から出力された加速度データを時計部13で計時する時刻とメモリ部12から読み出した個人情報とともに出力インタフェース部14よりパソコンPCに出力する。このとき、端末装置1の信号処理部11が応答器2から情報(データ)を読み取ることができていれば、応答器2から読み取った情報も合わせて出力インタフェース部14よりパソコンPCに出力する。
【0035】
而して本実施形態によれば、第1加速度センサ部15のみで加速度が検出されていれば作業者が立ち止まって(停止して)作業していると判断でき、第1の加速度センサ部15が検出する加速度と第2の加速度センサ部16が検出する加速度が等しければ作業者が移動していると判断でき、第1加速度センサ部15が検出する加速度と第2加速度センサ部16が検出する加速度が異なれば作業者が移動しながら作業していると判断できる。尚、このような判断は、作業分析装置であるパソコンPCによって行われる。
【0036】
(実施形態4)
本実施形態の作業分析支援システムは、図4に示すように作業者が作業中に移動する作業空間内の適所に設置される複数の位置情報教示装置3を備える点に特徴があり、その他の構成は実施形態1と共通である。よって、実施形態1と共通の構成要素には同一の符号を付して説明を省略する。
【0037】
位置情報教示装置3は、設置場所に関する位置情報(例えば、作業空間に設定された2次元座標系における座標など)を記憶するとともに当該位置情報を電波や電磁波あるいは光を媒体とする無線信号で送信するものである。但し、このような位置情報教示装置3については従来周知の技術で実現可能であるから、詳細な構成についての図示並びに説明を省略する。
【0038】
一方、本実施形態における端末装置1は、位置情報教示装置3から送信される無線信号を受信する受信部17を具備している。すなわち、位置情報教示装置3から送信される無線信号の受信可能範囲(例えば、数メートル)に作業者が進入すると、当該作業者の身体(手首)に装着されている端末装置1の受信部17が位置情報教示装置3から送信されている無線信号を受信し、無線信号で伝送される位置情報が信号処理部11に渡される。端末装置1の信号処理部11は、受信部17から位置情報を受け取った時点の時刻を時計部13から取得し、当該位置情報と時刻並びにメモリ部12から読み出した作業者の個人情報からなる移動情報を出力インタフェース部14よりパソコンPCに出力する。このとき、端末装置1の信号処理部11が応答器2から情報(データ)を読み取ることができていれば、応答器2から読み取った情報も合わせて出力インタフェース部14よりパソコンPCに出力する。
【0039】
而して本実施形態によれば、作業分析装置たるパソコンPCにおいて、端末装置1から出力された移動情報に含まれる位置情報と当該位置情報が教示された時刻とに基づいて作業者の移動距離や移動速度を把握することができる。
【0040】
(実施形態5)
本実施形態の作業分析支援システムは、可倒式の操作レバーを有し当該操作レバーが操作されることで移動及び停止する台車を作業対象物とするものであって、基本的な構成は実施形態1〜4の何れかと共通である。よって、実施形態1〜4と共通の構成要素には同一の符号を付して図示並びに説明を省略する。
【0041】
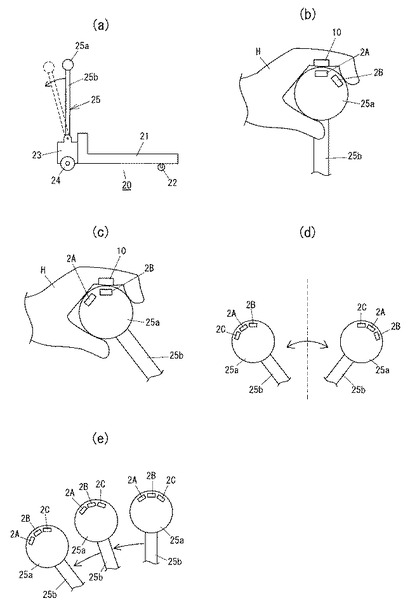
作業対象物たる台車20は、例えば、図5(a)に示すように平行に配置された一対のフォーク形荷台21,21と、フォーク形荷台21,21の先端部下面に設けられた一対の前輪22,22と、方向転換自在の一対の後輪24,24を有しフォーク形荷台21,21を昇降させるジャッキ装置23と、ジャッキ装置23の上部に設けられた操作レバー25とを備えた、いわゆるハンドリフター(あるいはパレットトラックとも呼ばれる)である。操作レバー25は、作業者の手で把持される把持部25aと、一端に把持部25aが設けられるとともに他端がジャッキ装置23に回動自在に支持された棒状の支持体25bとを有している。このような台車20(ハンドリフター又はパレットトラック)は従来周知であって、停止しているときは操作レバー25の支持体25bが垂直な状態(図5(a)の実線で示す状態)にあり、移動しているときは作業者によって引かれる又は押されるために操作レバー25の支持体25bが垂直な状態から回動した(倒れた)状態(図5(a)の破線で示す状態)にある。ここで、操作レバー25の把持部25aは略円柱状に形成されており、図5(b)に示すように径方向において支持体25bの先端と対向する位置に応答器2(2A)が配設されるとともに、操作レバー25の操作方向(把持部25aの周方向)に沿って応答器2Aから離間した位置に別の応答器2(2B)が配設されている。
【0042】
本実施形態における端末装置1は、アンテナ10が作業者Hの人差指の中節に取り付けられ、アンテナ10以外の信号処理部11等が手首に取り付けられている。尚、アンテナ10と信号処理部11とは図示しない信号線で接続される。
【0043】
図5(b)に示すように台車20が停止しているときは、操作レバー25が回動していない(倒れていない)ことから操作レバー25の把持部25aに配設されている2つの応答器2のうちの一方の応答器2Aと作業者の人差指に取り付けられているアンテナ10とが対向することになる。一方、図5(c)に示すように台車20が移動しているときは、操作レバー25が回動する(倒される)ことから操作レバー25の把持部25aに配設されている2つの応答器2のうちの他方の応答器2Bと作業者の人差指に取り付けられているアンテナ10とが対向することになる。
【0044】
従って、作業者が把持部25aを把持していても操作レバー25を回動していない(操作していない)ときは端末装置1が一方の応答器2Aから作業情報を読み取ることになり、作業者が把持部25aを把持して操作レバー25を回動している(操作している)ときは端末装置1が他方の応答器2Bから作業情報を読み取ることになるので、台車20に対する作業内容(停止と移動)を判別することが可能になる。
【0045】
ここで、操作レバー25が停止位置(中立位置)から一方向き(図5(a)における左向き)にのみ倒れるのでなく、図5(d)に示すように他方向き(図5(d)における右向き)にも倒れるような台車20がある。このような台車20では、通常は図5(d)における左向き(以下、「正の向き」と呼ぶ。)に操作レバー25が倒されて操作されるが、正の向きの操作で失敗した場合に、その失敗を修正するために図5(d)における右向き(以下、「負の向き」と呼ぶ。)に操作レバー25が倒されて操作されることになる。
【0046】
そこで、図5(d)に示すように把持部25aの周方向において応答器2Aを挟んで応答器2Bと反対側に別の応答器2Cを配設し、操作レバー25が操作されていないときは中央の応答器2Aから情報が読み取られ、操作レバー25が正の向きに操作されているときは右側の応答器2Bから情報が読み取られ、操作レバー25が負の向きに操作されているときは左側の応答器2Cから情報が読み取られるようにすれば、応答器2A〜2Cから読み取られる情報に基づいて操作レバー25の操作向きを判別し、さらに操作レバー25が正の向きに操作されていれば台車20が適切に操作され、操作レバー25が負の向きに操作されていれば台車20が無駄に操作され、操作レバー25が正の向きと負の向きに繰り返し操作されていれば台車20の取り回しが行われたことが判別できる。
【0047】
また、上述のような台車20においては、操作レバー25が強く引かれるほど速度が速くなり、しかも、操作レバー25の倒れる(回動する)角度が操作力にほぼ比例して大きくなるから、台車20の速度と操作レバー25の角度がほぼ比例することになる。
【0048】
そこで、図5(e)に示すように把持部25aの周方向において応答器2Bを挟んで応答器2Aと反対側に別の応答器2Cを配設し、操作レバー25が操作されていないときは左端の応答器2Aから情報が読み取られ、操作レバー25が中程度の力で操作されているときは中央の応答器2Bから情報が読み取られ、操作レバー25が大きな力で操作されているときは右端の応答器2Cから情報が読み取られるようにすれば、応答器2A〜2Cから読み取られる情報に基づいて操作レバー25に対する操作力の大きさ及び台車20の速度を判別することができる。
【0049】
尚、作業対象物たる台車は上述のハンドリフターに限定されるものではなく、例えば、病院等において食事を搬送するために使用される配膳車なども本実施形態における作業対象物とすることができる。
【図面の簡単な説明】
【0050】
【図1】本発明の実施形態1を示すブロック図である。
【図2】本発明の実施形態2を示すブロック図である。
【図3】本発明の実施形態3を示すブロック図である。
【図4】本発明の実施形態4を示すブロック図である。
【図5】(a)は本発明の実施形態5における作業対象物たる台車の側面図、(b)〜(e)は台車の把持部を示す概略構成図である。
【符号の説明】
【0051】
1 端末装置
2 応答器
10 アンテナ(質問器)
11 信号処理部(質問器)
12 メモリ部(記憶手段)
13 時計部(時計手段)
14 出力インタフェース部
【技術分野】
【0001】
本発明は、工場や倉庫などの作業場で作業者が行う作業の作業分析を支援する作業分析支援システムに関するものである。
【背景技術】
【0002】
従来の作業分析支援システムとして、作業者が所持するハンディターミナルに作業者自身が作業に関する操作入力を行い、当該ハンディターミナルが作業者の入力操作に従って各作業に対応した作業開始時刻と作業終了時刻とを検出し、その際に取得した時間データを記憶するとともに記憶した時間データをパソコンに出力し、当該パソコンにおいて当該時間データに基づいて、作業者が行った作業毎の作業時間を集計し、分析するものが提案されている(特許文献1参照)。
【0003】
また、別の従来システムとして、作業者が所持するハンディターミナルによって作業コード表から各作業に対応するバーコードを読み取り、読み取ったバーコードデータおよび読み取り時刻を通信手段を介してパーソナルコンピュータに送信し、当該パーソナルコンピュータにおいて、先のバーコードの読み取り時から後のバーコードの読み取り時までの間を各作業に要した作業時間として算出するとともに、算出したデータを集計し、所定の表ないしグラフを自動作成するものが提案されている(特許文献2参照)。
【特許文献1】特開2002−170140号公報
【特許文献2】特開平7−65076号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1,2に記載されている従来例では、作業者に対して分析対象の本来の作業以外の作業、すなわち、ハンディターミナルへの入力操作やハンディターミナルによるバーコードの読み取りなどの作業を行わせる必要があるため、作業者に余計な負担をかけてしまったり、あるいは前記入力操作やバーコードの読み取りなどを作業者が忘れてしまうことで正しいデータ(情報)を収集できない虞がある。
【0005】
本発明は上記事情に鑑みて為されたものであり、その目的は、作業者に負担をかけることなしに作業に関する正しい情報を収集することができる作業分析支援システムを提供することにある。
【課題を解決するための手段】
【0006】
請求項1の発明は、上記目的を達成するために、作業対象物に設置される1乃至複数の応答器と、当該応答器から作業対象物に関する情報を読み取る質問器を具備して作業者の身体に装着される端末装置とを備え、端末装置は、前記質問器と、作業者に関する個人情報を記憶した記憶手段と、時刻を計時する時計手段と、質問器で読み取られた作業対象物に関する情報と質問器が応答器から当該情報を読み取った時刻並びに記憶手段に記憶している個人情報を外部に出力する出力手段とを具備することを特徴とする。
【0007】
請求項1の発明によれば、作業者が本来の作業以外の行動を行わなくとも、作業者の身体に装着される端末装置の質問器が作業対象物に設置される応答器から当該作業対象物に関する情報を自動的に読み取り、端末装置が具備する時計手段で計時する時刻と前記情報を対応付けて出力手段から外部に出力することができる。その結果、作業者に負担をかけることなしに作業に関する正しい情報を収集することができる。
【0008】
請求項2の発明は、請求項1の発明において、端末装置は、加速度を検出する加速度検出手段を具備し、加速度検出手段で検出される加速度及び検出された時刻を含む動作情報が出力手段から出力されることを特徴とする。
【0009】
請求項2の発明によれば、加速度検出手段で加速度が検出されているか否かによって作業者が作業を行っていること(時刻)と作業を行っていないこと(時刻)を判別することができる。
【0010】
請求項3の発明は、請求項2の発明において、前記加速度検出手段は、作業者の腕若しくは手指に取り付けられる第1の加速度センサと、当該作業者の胴体に取り付けられる第2の加速度センサとを有することを特徴とする。
【0011】
請求項3の発明によれば、第1の加速度センサのみで加速度が検出されていれば作業者が立ち止まって(停止して)作業していると判断でき、第1の加速度センサが検出する加速度と第2の加速度センサが検出する加速度が等しければ作業者が移動していると判断でき、第1の加速度センサが検出する加速度と第2の加速度センサが検出する加速度が異なれば作業者が移動しながら作業していると判断できる。
【0012】
請求項4の発明は、請求項1〜3の何れか1項の発明において、作業者が作業中に移動する作業空間内の適所に設置される複数の位置情報教示装置を備え、端末装置の出力手段は、前記位置情報教示装置から教示される位置情報と当該位置情報が教示された時刻を含む移動情報を出力することを特徴とする。
【0013】
請求項4の発明によれば、移動情報に含まれる位置情報と当該位置情報が教示された時刻とに基づいて作業者の移動距離や移動速度を把握することができる。
【0014】
請求項5の発明は、請求項1〜4の何れか1項の発明において、作業対象物は、可倒式の操作レバーを有し当該操作レバーが操作されることで移動及び停止する台車からなり、操作レバーは、複数の応答器が配設されるとともに作業者の手で把持される把持部と、一端に把持部が設けられるとともに他端が支持された支持体とを有し、複数の応答器は、把持部に対して操作レバーの操作方向に沿って互いに離間して配設されることを特徴とする。
【0015】
請求項5の発明によれば、複数の応答器のうちで何れの応答器から情報が読み取られたかによって作業内容を判別することができる。
【0016】
請求項6の発明は、請求項5の発明において、操作レバーは、中立点を挟んで互いに異なる向きに操作されるものであって、当該中立点に対応する位置と、異なる操作向きのそれぞれに対応する複数の位置とにそれぞれ応答器が配設されることを特徴とする。
【0017】
請求項6の発明によれば、台車を使った作業内容の詳細を分析することができる。
【0018】
請求項7の発明は、請求項5の発明において、作業対象物は、操作レバーの操作量が大きくなるに従って移動速度が増大する台車であることを特徴とする。
【0019】
請求項7の発明によれば、台車の移動速度を判別することができる。
【発明の効果】
【0020】
本発明によれば、作業者に負担をかけることなしに作業に関する正しい情報を収集することができる。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照して本発明の実施形態を詳細に説明する。
【0022】
(実施形態1)
本実施形態の作業分析支援システムは、図1に示すように作業対象物に設置される複数の応答器2と、各応答器2から作業対象物に関する情報を読み取る質問器を具備して作業者の身体に装着される端末装置1とを備える。
【0023】
応答器2は、データキャリア若しくはIDタグとも呼ばれ、内蔵する半導体メモリに予め記憶されている情報(データ)が電波や電磁波あるいは光(赤外光)などの媒体を介して非接触で読み取られるものである。尚、このような応答器2の構成については従来周知であるから詳細な構成の図示並びに説明は省略する。
【0024】
端末装置1は、応答器2との間で電波あるいは電磁波で交信するためのアンテナ10と、アンテナ10から送受信する信号を信号処理する信号処理部11と、不揮発性の半導体メモリからなるメモリ部12と、時刻を計時する時計部13と、信号処理部11と外部の作業分析装置(パーソナル・コンピュータ<以下、「パソコン」と略す。>)PCとをインタフェースする出力インタフェース部14とを具備し、リストバンドなどを用いて作業者の手首に取り付けられる。またメモリ部12には作業者の個人情報(氏名及び所属部署など)が予め記憶されている。尚、本実施形態ではアンテナ10と信号処理部11とで質問器(リーダ/ライタとも呼ばれる)が構成され、さらに応答器2と質問器とでデータキャリアシステムが構成される。但し、このような質問器(アンテナ10と信号処理部11)並びにデータキャリアシステムについては従来周知であるから(例えば、日本工業規格JIS X0500 データキャリア用語等参照)、詳細な構成についての図示並びに説明は省略する。
【0025】
作業分析装置たるパソコンPCは、端末装置1の出力インタフェース部14より出力される情報(データ)を有線又は無線で取り込み、取り込んだ情報を分析する処理、例えば、作業者毎の作業時間等の集計やグラフ化などを行うためのプログラムを実行する。
【0026】
複数の応答器2はそれぞれ作業対象物、例えば、作業者が手持ちで運搬する箱(図示せず)などに取り付けられるとともに、各作業対象物に関する情報(作業対象物の種類や識別番号など)を記憶している。従って、作業者が作業対象物(箱)を手で持つと、作業者の身体(手首)に取り付けられている端末装置1と当該作業対象物(箱)に取り付けられている応答器2とが交信可能範囲(例えば、数センチメートル)にまで接近し、端末装置1によって応答器2に記憶している情報(データ)が読み取られる。
【0027】
端末装置1の信号処理部11は、応答器2から情報(データ)を読み取った時点の時刻を時計部13から取得し、当該情報と時刻並びにメモリ部12から読み出した作業者の個人情報からなる作業情報を出力インタフェース部14よりパソコンPCに出力する。但し、応答器2から読み取った情報と時刻をメモリ部12に一旦記憶しておき、後で一括して出力インタフェース部14よりパソコンPCに出力するようにしても構わない。特に、出力インタフェース部14が無線通信によってパソコンPCにデータを伝送する場合は前者、出力インタフェース部14が有線通信によってパソコンPCにデータを伝送する場合は後者が望ましい。
【0028】
而して本実施形態によれば、作業者が本来の作業以外の行動、例えば、特許文献1に記載されている従来例のようなハンディターミナルに対する入力操作や、特許文献2に記載されているようなハンディターミナルによるバーコードの読み取り操作などを行わなくとも、作業者の身体に装着される端末装置1の質問器が作業対象物に設置される応答器2から当該作業対象物に関する情報を自動的に読み取り、時計部13で計時する時刻と前記情報を対応付けて出力インタフェース部14から外部に出力することができるので、作業者に負担をかけることなしに作業に関する正しい情報を収集することができる。尚、端末装置1の質問器は交信可能範囲内に存在する応答器2のみから情報(データ)を読み取るので、実際に作業が行われていない作業対象物の応答器2から情報(データ)が誤って読み取られる虞は殆ど無い。
【0029】
(実施形態2)
本実施形態の作業分析支援システムは、図2に示すように加速度を検出する加速度センサ部15を具備している点に特徴があり、その他の構成は実施形態1と共通である。よって、実施形態1と共通の構成要素には同一の符号を付して説明を省略する。
【0030】
加速度センサ部15は、加速度の大きさに対応した検出信号(加速度データ)を信号処理部11に出力する。端末装置1の信号処理部11は、加速度センサ部15から出力された加速度データを時計部13で計時する時刻とメモリ部12から読み出した個人情報とともに出力インタフェース部14よりパソコンPCに出力する。このとき、端末装置1の信号処理部11が応答器2から情報(データ)を読み取ることができていれば、応答器2から読み取った情報も合わせて出力インタフェース部14よりパソコンPCに出力する。
【0031】
而して本実施形態によれば、加速度センサ部15で検出する加速度データに基づいて作業者が作業を行っていること(時刻)と作業を行っていないこと(時刻)を判別することができる。尚、このような判別は、作業分析装置であるパソコンPCによって行われる。
【0032】
(実施形態3)
本実施形態の作業分析支援システムは、図3に示すように端末装置1に内蔵された第1加速度センサ部15の他に、作業者の胴体に装着される第2加速度センサ部16を具備している点に特徴があり、その他の構成は実施形態2と共通である。よって、実施形態2と共通の構成要素には同一の符号を付して説明を省略する。
【0033】
第2加速度センサ部16は、例えば、作業者が着用しているベルトに取り付けられ、第1加速度センサ部15と同様に加速度の大きさに対応した検出信号(加速度データ)を信号線Lsを介して信号処理部11に出力するものである。但し、第2加速度センサ部16が直接パソコンPCに加速度データを出力するようにしても構わない。
【0034】
端末装置1の信号処理部11は、第1加速度センサ部15から出力された加速度データ並びに第2加速度センサ部16から出力された加速度データを時計部13で計時する時刻とメモリ部12から読み出した個人情報とともに出力インタフェース部14よりパソコンPCに出力する。このとき、端末装置1の信号処理部11が応答器2から情報(データ)を読み取ることができていれば、応答器2から読み取った情報も合わせて出力インタフェース部14よりパソコンPCに出力する。
【0035】
而して本実施形態によれば、第1加速度センサ部15のみで加速度が検出されていれば作業者が立ち止まって(停止して)作業していると判断でき、第1の加速度センサ部15が検出する加速度と第2の加速度センサ部16が検出する加速度が等しければ作業者が移動していると判断でき、第1加速度センサ部15が検出する加速度と第2加速度センサ部16が検出する加速度が異なれば作業者が移動しながら作業していると判断できる。尚、このような判断は、作業分析装置であるパソコンPCによって行われる。
【0036】
(実施形態4)
本実施形態の作業分析支援システムは、図4に示すように作業者が作業中に移動する作業空間内の適所に設置される複数の位置情報教示装置3を備える点に特徴があり、その他の構成は実施形態1と共通である。よって、実施形態1と共通の構成要素には同一の符号を付して説明を省略する。
【0037】
位置情報教示装置3は、設置場所に関する位置情報(例えば、作業空間に設定された2次元座標系における座標など)を記憶するとともに当該位置情報を電波や電磁波あるいは光を媒体とする無線信号で送信するものである。但し、このような位置情報教示装置3については従来周知の技術で実現可能であるから、詳細な構成についての図示並びに説明を省略する。
【0038】
一方、本実施形態における端末装置1は、位置情報教示装置3から送信される無線信号を受信する受信部17を具備している。すなわち、位置情報教示装置3から送信される無線信号の受信可能範囲(例えば、数メートル)に作業者が進入すると、当該作業者の身体(手首)に装着されている端末装置1の受信部17が位置情報教示装置3から送信されている無線信号を受信し、無線信号で伝送される位置情報が信号処理部11に渡される。端末装置1の信号処理部11は、受信部17から位置情報を受け取った時点の時刻を時計部13から取得し、当該位置情報と時刻並びにメモリ部12から読み出した作業者の個人情報からなる移動情報を出力インタフェース部14よりパソコンPCに出力する。このとき、端末装置1の信号処理部11が応答器2から情報(データ)を読み取ることができていれば、応答器2から読み取った情報も合わせて出力インタフェース部14よりパソコンPCに出力する。
【0039】
而して本実施形態によれば、作業分析装置たるパソコンPCにおいて、端末装置1から出力された移動情報に含まれる位置情報と当該位置情報が教示された時刻とに基づいて作業者の移動距離や移動速度を把握することができる。
【0040】
(実施形態5)
本実施形態の作業分析支援システムは、可倒式の操作レバーを有し当該操作レバーが操作されることで移動及び停止する台車を作業対象物とするものであって、基本的な構成は実施形態1〜4の何れかと共通である。よって、実施形態1〜4と共通の構成要素には同一の符号を付して図示並びに説明を省略する。
【0041】
作業対象物たる台車20は、例えば、図5(a)に示すように平行に配置された一対のフォーク形荷台21,21と、フォーク形荷台21,21の先端部下面に設けられた一対の前輪22,22と、方向転換自在の一対の後輪24,24を有しフォーク形荷台21,21を昇降させるジャッキ装置23と、ジャッキ装置23の上部に設けられた操作レバー25とを備えた、いわゆるハンドリフター(あるいはパレットトラックとも呼ばれる)である。操作レバー25は、作業者の手で把持される把持部25aと、一端に把持部25aが設けられるとともに他端がジャッキ装置23に回動自在に支持された棒状の支持体25bとを有している。このような台車20(ハンドリフター又はパレットトラック)は従来周知であって、停止しているときは操作レバー25の支持体25bが垂直な状態(図5(a)の実線で示す状態)にあり、移動しているときは作業者によって引かれる又は押されるために操作レバー25の支持体25bが垂直な状態から回動した(倒れた)状態(図5(a)の破線で示す状態)にある。ここで、操作レバー25の把持部25aは略円柱状に形成されており、図5(b)に示すように径方向において支持体25bの先端と対向する位置に応答器2(2A)が配設されるとともに、操作レバー25の操作方向(把持部25aの周方向)に沿って応答器2Aから離間した位置に別の応答器2(2B)が配設されている。
【0042】
本実施形態における端末装置1は、アンテナ10が作業者Hの人差指の中節に取り付けられ、アンテナ10以外の信号処理部11等が手首に取り付けられている。尚、アンテナ10と信号処理部11とは図示しない信号線で接続される。
【0043】
図5(b)に示すように台車20が停止しているときは、操作レバー25が回動していない(倒れていない)ことから操作レバー25の把持部25aに配設されている2つの応答器2のうちの一方の応答器2Aと作業者の人差指に取り付けられているアンテナ10とが対向することになる。一方、図5(c)に示すように台車20が移動しているときは、操作レバー25が回動する(倒される)ことから操作レバー25の把持部25aに配設されている2つの応答器2のうちの他方の応答器2Bと作業者の人差指に取り付けられているアンテナ10とが対向することになる。
【0044】
従って、作業者が把持部25aを把持していても操作レバー25を回動していない(操作していない)ときは端末装置1が一方の応答器2Aから作業情報を読み取ることになり、作業者が把持部25aを把持して操作レバー25を回動している(操作している)ときは端末装置1が他方の応答器2Bから作業情報を読み取ることになるので、台車20に対する作業内容(停止と移動)を判別することが可能になる。
【0045】
ここで、操作レバー25が停止位置(中立位置)から一方向き(図5(a)における左向き)にのみ倒れるのでなく、図5(d)に示すように他方向き(図5(d)における右向き)にも倒れるような台車20がある。このような台車20では、通常は図5(d)における左向き(以下、「正の向き」と呼ぶ。)に操作レバー25が倒されて操作されるが、正の向きの操作で失敗した場合に、その失敗を修正するために図5(d)における右向き(以下、「負の向き」と呼ぶ。)に操作レバー25が倒されて操作されることになる。
【0046】
そこで、図5(d)に示すように把持部25aの周方向において応答器2Aを挟んで応答器2Bと反対側に別の応答器2Cを配設し、操作レバー25が操作されていないときは中央の応答器2Aから情報が読み取られ、操作レバー25が正の向きに操作されているときは右側の応答器2Bから情報が読み取られ、操作レバー25が負の向きに操作されているときは左側の応答器2Cから情報が読み取られるようにすれば、応答器2A〜2Cから読み取られる情報に基づいて操作レバー25の操作向きを判別し、さらに操作レバー25が正の向きに操作されていれば台車20が適切に操作され、操作レバー25が負の向きに操作されていれば台車20が無駄に操作され、操作レバー25が正の向きと負の向きに繰り返し操作されていれば台車20の取り回しが行われたことが判別できる。
【0047】
また、上述のような台車20においては、操作レバー25が強く引かれるほど速度が速くなり、しかも、操作レバー25の倒れる(回動する)角度が操作力にほぼ比例して大きくなるから、台車20の速度と操作レバー25の角度がほぼ比例することになる。
【0048】
そこで、図5(e)に示すように把持部25aの周方向において応答器2Bを挟んで応答器2Aと反対側に別の応答器2Cを配設し、操作レバー25が操作されていないときは左端の応答器2Aから情報が読み取られ、操作レバー25が中程度の力で操作されているときは中央の応答器2Bから情報が読み取られ、操作レバー25が大きな力で操作されているときは右端の応答器2Cから情報が読み取られるようにすれば、応答器2A〜2Cから読み取られる情報に基づいて操作レバー25に対する操作力の大きさ及び台車20の速度を判別することができる。
【0049】
尚、作業対象物たる台車は上述のハンドリフターに限定されるものではなく、例えば、病院等において食事を搬送するために使用される配膳車なども本実施形態における作業対象物とすることができる。
【図面の簡単な説明】
【0050】
【図1】本発明の実施形態1を示すブロック図である。
【図2】本発明の実施形態2を示すブロック図である。
【図3】本発明の実施形態3を示すブロック図である。
【図4】本発明の実施形態4を示すブロック図である。
【図5】(a)は本発明の実施形態5における作業対象物たる台車の側面図、(b)〜(e)は台車の把持部を示す概略構成図である。
【符号の説明】
【0051】
1 端末装置
2 応答器
10 アンテナ(質問器)
11 信号処理部(質問器)
12 メモリ部(記憶手段)
13 時計部(時計手段)
14 出力インタフェース部
【特許請求の範囲】
【請求項1】
作業対象物に設置される1乃至複数の応答器と、当該応答器から作業対象物に関する情報を読み取る質問器を具備して作業者の身体に装着される端末装置とを備え、
端末装置は、前記質問器と、作業者に関する個人情報を記憶した記憶手段と、時刻を計時する時計手段と、質問器で読み取られた作業対象物に関する情報と質問器が応答器から当該情報を読み取った時刻並びに記憶手段に記憶している個人情報を外部に出力する出力手段とを具備することを特徴とする作業分析支援システム。
【請求項2】
端末装置は、加速度を検出する加速度検出手段を具備し、加速度検出手段で検出される加速度及び検出された時刻を含む動作情報が出力手段から出力されることを特徴とする請求項1記載の作業分析支援システム。
【請求項3】
前記加速度検出手段は、作業者の腕若しくは手指に取り付けられる第1の加速度センサと、当該作業者の胴体に取り付けられる第2の加速度センサとを有することを特徴とする請求項2記載の作業分析支援システム。
【請求項4】
作業者が作業中に移動する作業空間内の適所に設置される複数の位置情報教示装置を備え、
端末装置の出力手段は、前記位置情報教示装置から教示される位置情報と当該位置情報が教示された時刻を含む移動情報を出力することを特徴とする請求項1〜3の何れか1項に記載の作業分析支援システム。
【請求項5】
作業対象物は、可倒式の操作レバーを有し当該操作レバーが操作されることで移動及び停止する台車からなり、操作レバーは、複数の応答器が配設されるとともに作業者の手で把持される把持部と、一端に把持部が設けられるとともに他端が支持された支持体とを有し、複数の応答器は、把持部に対して操作レバーの操作方向に沿って互いに離間して配設されることを特徴とする請求項1〜4の何れか1項に記載の作業分析支援システム。
【請求項6】
操作レバーは、中立点を挟んで互いに異なる向きに操作されるものであって、当該中立点に対応する位置と、異なる操作向きのそれぞれに対応する複数の位置とにそれぞれ応答器が配設されることを特徴とする請求項5記載の作業分析支援システム。
【請求項7】
作業対象物は、操作レバーの操作量が大きくなるに従って移動速度が増大する台車であることを特徴とする請求項5記載の作業分析支援システム。
【請求項1】
作業対象物に設置される1乃至複数の応答器と、当該応答器から作業対象物に関する情報を読み取る質問器を具備して作業者の身体に装着される端末装置とを備え、
端末装置は、前記質問器と、作業者に関する個人情報を記憶した記憶手段と、時刻を計時する時計手段と、質問器で読み取られた作業対象物に関する情報と質問器が応答器から当該情報を読み取った時刻並びに記憶手段に記憶している個人情報を外部に出力する出力手段とを具備することを特徴とする作業分析支援システム。
【請求項2】
端末装置は、加速度を検出する加速度検出手段を具備し、加速度検出手段で検出される加速度及び検出された時刻を含む動作情報が出力手段から出力されることを特徴とする請求項1記載の作業分析支援システム。
【請求項3】
前記加速度検出手段は、作業者の腕若しくは手指に取り付けられる第1の加速度センサと、当該作業者の胴体に取り付けられる第2の加速度センサとを有することを特徴とする請求項2記載の作業分析支援システム。
【請求項4】
作業者が作業中に移動する作業空間内の適所に設置される複数の位置情報教示装置を備え、
端末装置の出力手段は、前記位置情報教示装置から教示される位置情報と当該位置情報が教示された時刻を含む移動情報を出力することを特徴とする請求項1〜3の何れか1項に記載の作業分析支援システム。
【請求項5】
作業対象物は、可倒式の操作レバーを有し当該操作レバーが操作されることで移動及び停止する台車からなり、操作レバーは、複数の応答器が配設されるとともに作業者の手で把持される把持部と、一端に把持部が設けられるとともに他端が支持された支持体とを有し、複数の応答器は、把持部に対して操作レバーの操作方向に沿って互いに離間して配設されることを特徴とする請求項1〜4の何れか1項に記載の作業分析支援システム。
【請求項6】
操作レバーは、中立点を挟んで互いに異なる向きに操作されるものであって、当該中立点に対応する位置と、異なる操作向きのそれぞれに対応する複数の位置とにそれぞれ応答器が配設されることを特徴とする請求項5記載の作業分析支援システム。
【請求項7】
作業対象物は、操作レバーの操作量が大きくなるに従って移動速度が増大する台車であることを特徴とする請求項5記載の作業分析支援システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2009−265937(P2009−265937A)
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願番号】特願2008−114598(P2008−114598)
【出願日】平成20年4月24日(2008.4.24)
【出願人】(000005832)パナソニック電工株式会社 (17,916)
【Fターム(参考)】
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願日】平成20年4月24日(2008.4.24)
【出願人】(000005832)パナソニック電工株式会社 (17,916)
【Fターム(参考)】
[ Back to top ]