
作業検知システム

【課題】ワークや作業主体の作業に干渉する可能性を低減できる作業検知システムを提供する。
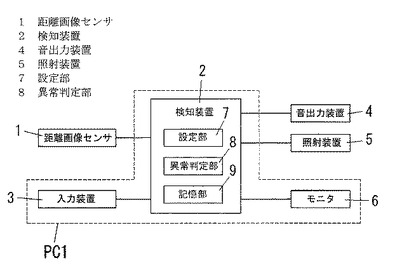
【解決手段】距離画像センサ1は作業領域の距離画像を撮影する。検知装置2は、距離画像に現れる作業主体又は作業主体が扱うワークを検知対象とし、設定部7及び異常判定部8を備える。設定部7は、距離画像内で検知対象の存否を検知する複数の検知領域とその検知順序とを設定する。異常判定部8は、何れかの検知領域で検知順序とは異なる順序で検知対象が検知されると異常と判定して音出力装置4及び照射装置5に報知命令を出力する。音出力装置4及び照射装置5は、検知装置2から報知命令が入力されると、作業内容の異常をそれぞれ音及び光で報知する。
【解決手段】距離画像センサ1は作業領域の距離画像を撮影する。検知装置2は、距離画像に現れる作業主体又は作業主体が扱うワークを検知対象とし、設定部7及び異常判定部8を備える。設定部7は、距離画像内で検知対象の存否を検知する複数の検知領域とその検知順序とを設定する。異常判定部8は、何れかの検知領域で検知順序とは異なる順序で検知対象が検知されると異常と判定して音出力装置4及び照射装置5に報知命令を出力する。音出力装置4及び照射装置5は、検知装置2から報知命令が入力されると、作業内容の異常をそれぞれ音及び光で報知する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、作業検知システムに関するものである。
【背景技術】
【0002】
従来、製造装置においてワークの位置を検出するためにファイバセンサを備えたものが提案されている(例えば特許文献1参照)。ファイバセンサは、発光部と、発光部から照射された光を受光する受光部を備え、発光部から照射された光が、検出対象のウェーハに設けられたウェーハノッチを通過して受光部に受光されることで、ウェーハノッチの位置を検出している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−340306号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、製造現場において特許文献1に開示されたファイバセンサを用いて各工程でワークや作業者の位置を検出する場合、検知領域を挟んでファイバセンサの発光部と受光部を配置する必要があり、ファイバセンサが作業の邪魔になるという問題があった。
【0005】
本発明は上記課題に鑑みて為されたものであり、その目的とするところは、ワークや作業者の作業に干渉する可能性を低減できる作業検知システムを提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本願の作業検知システムは、距離画像センサと検知装置と報知装置と設定装置とを備える。距離画像センサは作業領域の距離画像を出力する。検知装置は、距離画像に現れる作業主体又は作業主体が扱うワークを検知対象とし、距離画像をもとに作業内容の異常を検知すると報知命令を出力する。報知装置は報知命令が入力されると報知動作を行う。設定装置は、距離画像内で検知装置が検知対象の存否を検知する複数の検知領域及びその検知順序を設定する。検知装置は、何れかの検知領域で検知順序とは異なる順序で検知対象が検知されると異常と判定して報知命令を出力する異常判定部を備える。
【0007】
この作業検知システムにおいて、設定装置は、1サイクルの作業に対応する複数の検知領域のうち、1サイクルの作業の最後に検知対象が検出される検知領域を判定領域として設定することも好ましい。異常判定部は、判定領域で検知対象が検出された時点で、同じ1サイクルの作業に対応する他の検知領域の何れかで検知対象が検出されていなければ、異常と判定して報知命令を出力する。
【0008】
この作業検知システムにおいて、設定装置は、少なくとも1つの検知領域を開始領域として設定し、開始領域で検知対象が検出されると異常判定部による判定動作又は報知装置による報知動作を開始することも好ましい。
【0009】
この作業検知システムにおいて、設定装置は、距離画像センサが出力する距離画像内の全ての領域を開始領域として設定し、開始領域で検知対象が検出されると異常判定部による判定動作又は報知装置による報知動作を開始することも好ましい。
【0010】
この作業検知システムにおいて、検知装置が検知領域で検知対象を検出した際に検知領域毎に異なる音を出力させる音出力装置を備えることも好ましい。
【0011】
この作業検知システムにおいて、異常判定部により異常が発生したと判定されると、異常と判定された検知対象の検知履歴を記憶する第1記憶装置を備えることも好ましい。
【0012】
この作業検知システムにおいて、複数の検知領域のうち予め設定された検知領域で検知対象が検出されると、作業内容を音声で説明する作業支援装置を備えることも好ましい。
【0013】
この作業検知システムにおいて、検知領域に光を照射する照射装置を備え、照射装置は、光を照射する検知領域を検知順序にしたがって所定のタイミングで切り替えることも好ましい。
【0014】
この作業検知システムにおいて、検知領域に光を照射する照射装置を備え、照射装置は、複数の検知領域のうち予め設定された検知領域で検知対象が検出されると、検知順序における次の検知領域に光を照射することも好ましい。
【0015】
この作業検知システムにおいて、検知領域に光を照射する照射装置を備え、照射装置は、何れかの検知領域で検知順序とは異なる順序で検知対象が検知されると、異なる順序で検知対象が検知された検知領域と、他の検知領域とに、異なる光を照射することも好ましい。
【0016】
この作業検知システムにおいて、照射装置は、光の照射範囲が複数の検知領域を含むものであり、照射範囲の一部に照射される光を制限することによって、任意の検知領域に光を照射させることも好ましい。
【0017】
この作業検知システムにおいて、1サイクルの作業に対応する複数の検知領域のうち何れかの検知領域で検知対象が検知されてから、全ての検知領域で検知対象を検知し終えるまでの作業時間を測定する作業時間測定装置と、作業時間測定部によって測定された作業時間を記憶する第2記憶装置とを備えることも好ましい。
【発明の効果】
【0018】
本発明によれば、ワークや作業主体の作業に干渉する可能性を低減できる。
【図面の簡単な説明】
【0019】
【図1】本実施形態の作業検知システムのブロック図である。
【図2】同上が適用された作業領域を示し、(a)は正面図、(b)は側面図である。
【図3】(a)〜(e)は検知対象の作業内容の説明図である。
【図4】(a)〜(i)は作業工程毎の撮像画像の例図である。
【図5】同上の動作を説明するフローチャートである。
【図6】(a)(b)は同上の照射装置による照射領域の説明図である。
【発明を実施するための形態】
【0020】
以下では、本発明の作業検知システムが、複数のワーク(例えば完成品や取扱説明書からなる)を作業主体である作業者が箱に梱包する作業領域に適用された実施形態について図面を参照して説明する。尚、作業検知システムが適用される作業領域は以下の実施形態に限定されるものではなく、種々の作業領域に適用できる。また、以下の実施形態では人間が作業を行う場合について説明するが、作業を行う作業主体は産業用のロボットでも、人間が遠隔操作するマニピュレータでもよい。
【0021】
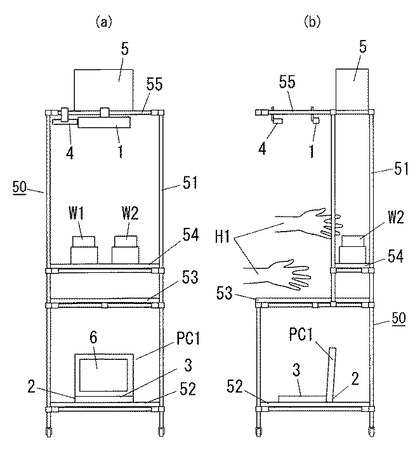
図2は本実施形態の作業検知システムが適用された作業台50を示し、図2(a)は作業台50の正面図、図2(b)は作業台50の側面図である。尚、以下の説明では特に断りがないかぎり、図2(a)に示す向きにおいて上下左右の方向を規定し、図2(b)における左側を前側、右側を後側として説明を行う。
【0022】
作業台50は、金属パイプを組み合わせて構成されるフレーム51と、フレーム51にそれぞれ支持された3段の棚板52,53,54を備える。下段及び中段の棚板52,53は、平面視の形状が略正方形の棚板であって、外形寸法が略同じ寸法となっている。下段の棚板52にはパーソナルコンピュータPC1が載置されている。中段の棚板53は、作業者が作業しやすい高さ位置(例えば作業者の腰付近の高さ位置)に設けられ、この棚板53上で検知対象の梱包作業が行われる。上段の棚板54は、平面視の形状が長方形状に形成されており、棚板53と左右方向の幅寸法は同じであるが、棚板53に比べて奥行き寸法が小さく、棚板53の奥側寄りに設けられ、作業者によって扱われるワークW1,W2を載せる部品棚として用いられている。フレーム51の上方には、作業者の背丈よりも高い位置に、金属パイプを組み合わせて構成された支持部55が設けられ、この支持部55に距離画像センサ1と音出力装置4と照射装置5が取り付けられている。
【0023】
図1は作業検知システムのブロック図である。作業検知システムは、距離画像センサ1と検知装置2と入力装置3と音出力装置4と照射装置5とモニタ6とを主要な構成として備えている。尚、検知装置2と入力装置3とモニタ6とは例えばノート型のパーソナルコンピュータPC1で実現されている。
【0024】
距離画像センサ1は、支持部55に取り付けられ、作業領域である中段の棚板53及び上段の棚板54を上方から撮影する。距離画像センサ1は、レーザ投影方式或いはTOF方式などの周知の測定方式で撮像範囲内に存在する物体の形状と物体までの距離を撮像し、各画素の画素値が検出対象までの距離となる距離画像を取得し、距離画像の画像データを検知装置2へ出力する。また距離画像センサ1は、撮像範囲内の2次元画像を撮影する機能も備えており、二次元画像の画像データを検知装置2へ出力する。
【0025】
入力装置3は、パーソナルコンピュータPC1が備えるキーボードやマウスなどの入力デバイスで構成される。
【0026】
音出力装置4は、作業領域を含む空間に音を出力するスピーカ(図示せず)を有し、スピーカを下側に向けて支持部55に取り付けられ、異常の発生を報知する報知音などの音を下方に向けて出力する。
【0027】
照射装置5は、例えば液晶プロジェクタからなり、支持部55に取り付けられ、上段の棚板54及び中段の棚板53を光の投影範囲とする。照射装置5は、投影範囲の一部に照射される光を制限することによって、棚板53及び棚板54の所望の位置に光を照射する。
【0028】
ここにおいて、音出力装置4と照射装置5とで、検知装置からの報知命令にしたがって音及び光で報知動作を行う報知装置が構成されているが、報知装置として音出力装置4及び照射装置5の何れか一方のみを備えていてもよい。
【0029】
モニタ6は、例えばパーソナルコンピュータPC1が備える液晶ディスプレイからなり、検知装置2によって表示内容が制御され、検知領域や検知順序を設定するための設定画面などを表示する。
【0030】
検知装置2は、距離画像センサ1から入力される距離画像に現れる作業主体(作業者の体の一部、例えば手H1)を検知対象とし、距離画像をもとに作業内容の異常を検知すると報知命令を報知装置に出力して、異常の発生を報知する。検知装置2はパーソナルコンピュータPC1の演算処理部によって構成され、演算処理部の演算機能によってそれぞれ実現された設定部7及び異常判定部8を備える。設定部7は、例えば作業者が入力装置3を用いて入力した内容をもとに、距離画像内で検知対象の存否を検知する検知領域と、その検知順序を設定する。異常判定部8は、距離画像センサ1から入力される距離画像にパターンマッチングなどの処理を施して検知対象を抽出し、何れかの検知領域で検知順序とは異なる順序で検知対象が検知されると異常と判定して報知命令を音出力装置4及び照射装置5に出力する。尚、本実施形態では検知装置2は距離画像に現れる作業主体を検知対象としているが、作業主体によって扱われるワークを検知対象としてもよいし、作業主体及び作業主体が扱うワークの両方を検知対象としてもよい。また、本実施形態では検知装置2が設定装置の機能(設定部7)を備えているが、検知装置2と別個に設定装置が設けられていてもよい。例えば設定装置が検知装置2とは別のコンピュータで構成され、設定部7を検知装置2に接続し、検知装置2に接続された設定部7から複数の検知領域及びその検知順序を設定してもよい。
【0031】
次に、本実施形態の作業検知システムによる検知動作について以下に説明する。
【0032】
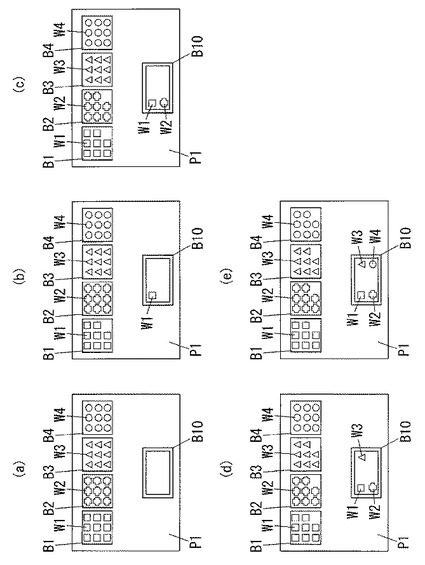
図3(a)〜(e)は梱包作業の各作業工程を示す説明図であり、距離画像センサ1で撮影された距離画像P1内には部品棚となる棚板54に載せられた4つの箱B1〜B4と、棚板53に載せられた箱B10が映されている。4つの箱B1〜B4にはそれぞれ異種の部品W1〜W4が入れられており、作業者は箱B1,B2,B3,B4の順番で部品W1,W2,W3,W4を1個ずつ取り出し、箱B10に箱詰めする作業を行う。図3(a)は梱包作業を行う前の状態であり、箱B10は空になっている。図3(b)は作業者が左端の箱B1から部品W1を1個取り出して、箱B10に入れた状態を示している。図3(c)は作業者が左端から2番目の箱B2から部品W2を1個取り出して、箱B10に入れた状態を示している。図3(d)は作業者が左端から3番目の箱B3から部品W3を1個取り出して、箱B10に入れた状態を示している。図3(e)は作業者が右端の箱B4から部品W4を1個取り出して、箱B10に入れた状態を示している。図3(e)の状態は1サイクル分の梱包作業が終了した状態であり、箱B10には4種類の部品W1〜W4が1個ずつ入れられている。
【0033】
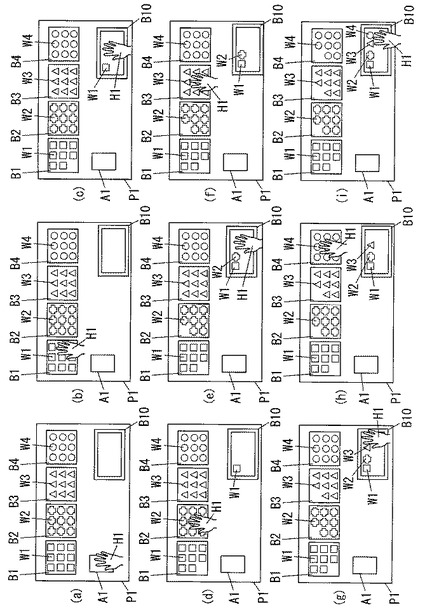
作業検知システムが上記の梱包作業の検査を行う場合、先ず設定部7によって、梱包作業の各工程で検知対象が現れる検知領域とその検知順序が設定される。すなわち設定作業者が、入力装置3を操作し、梱包作業の作業工程に基づいて各工程で作業者が検知される検知領域とその検知順序とを設定すると、設定部7はその設定内容を記憶部9に記憶させている。図4(a)〜(i)は上記の梱包作業において異常の有無を判定する処理を説明する説明図であり、距離画像P1内で部品を収めた箱B1〜B4と、部品が箱詰めされる箱B10が検知領域として設定されている。また、作業開始時に作業者が手H1を置く検知領域が開始領域A1として設定されている。
【0034】
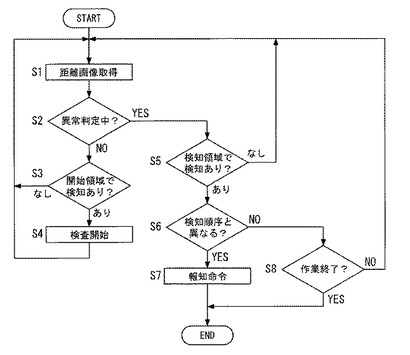
図5は異常判定部8による判定処理を説明するフローチャートであり、検知装置2には、距離画像センサ1から所定の時間間隔で撮影された距離画像が入力される(ステップS1)。異常判定部8は、距離画像センサ1から距離画像が入力されると、異常判定処理の実施中か否かを判定する(ステップS2)。
【0035】
ステップS2において異常判定処理の停止中と判定されると(ステップS2のNo)、異常判定部8は開始領域A1で作業者が検知されるか否かを判定する(ステップS3)。図4(a)に示すように作業者は1サイクル分の梱包作業を開始する毎に開始領域A1に手H1を置いており、異常判定部8は、開始領域A1で作業者が検知されたことから作業開始と判断し、異常判定処理を開始する(ステップS4)。尚、ステップS3の判定で開始領域A1に検知対象がいないと判定された場合、異常判定部8はステップS1に戻って、距離画像の入力待ちの状態となる。
【0036】
一方、ステップS2において異常判定中と判定されると、異常判定部8は、検知領域で作業者が検知さるか否かを判定し(ステップS5)、何れの検知領域でも作業者が検知されなければ、ステップS1に戻って、距離画像の入力待ちの状態となる。またステップS5において検知領域で作業者が検知された場合、異常判定部8は、作業者が検出された検知領域の順番が、設定部7によって予め設定された検知順序と異なっているか否かを判定する(ステップS6)。図3で説明した梱包作業を作業者が行う場合、図4(b)〜(i)に示すように、作業者の手H1が、箱B1→箱B10→箱B2→箱B10→箱B3→箱B10→箱B4→箱B10の順番で検出されることになる。ここで、距離画像から作業者が実際に検知された検知領域の順番が、作業工程に従って設定された検知順序と異なっている場合(ステップS6のYes)、異常判定部8は、この作業工程で予め決められた作業内容とは異なる作業が行われたと判断する。この時、異常判定部8は、報知命令を音出力装置4及び照射装置5に出力し、異常と判定された検知対象の検知履歴を記憶部9(第1記憶装置)に記憶させる。音出力装置4は、報知命令が入力されると、所定の報知音を出力し、異常の発生を音で報知する。照射装置5は、報知命令が入力されると、例えば検知順序が異なると判定された検知領域に光を照射させ、異常の発生を光で報知する。
【0037】
またステップS6において作業者が実際に検知された検知領域の順番が所定の検知順序と同じであった場合(ステップS6のNo)、異常判定部8は梱包作業が1サイクル分終了したか否かを判断する(ステップS8)。ここで、1サイクル分の梱包作業が終了していなければ(ステップS8のNo)、異常判定部8はステップS1に戻って距離画像の入力待ちの状態となり、1サイクル分の梱包作業が終了していれば(ステップS8のYes)、異常判定部8は異常判定処理を終了する。
【0038】
尚、図3で説明した梱包作業では箱B1,B2,B3,B4から部品を1個とる毎に箱B10に入れていたが、箱B1,B2,B3,B4から1個ずつ取り出した部品をトレー(図示せず)に入れ、最後にトレーから箱B10へと移し替えてもよい。この場合の検知順序は、箱B1→箱B2→箱B3→箱B4→箱B10となり、異常判定部8は、何れかの検知領域において、上記の検知順序とは異なる順序で検知対象が検出されると、異常が発生したと判定する。
【0039】
以上説明したように、作業検知システムは、距離画像センサ1と、検知装置2と、報知装置(本実施形態では音出力装置4及び照射装置5からなる)と、設定装置(本実施形態では設定部7からなる)とを備える。距離画像センサ1は作業領域の距離画像を出力する。検知装置2は、距離画像センサ1によって撮影された距離画像に現れる作業主体又は作業主体が扱うワークを検知対象とし、距離画像をもとに作業内容の異常を検知すると報知命令を出力する。報知装置は、報知命令が入力されると報知動作を行う。設定装置は、距離画像内で検知装置2が検知対象の存否を検知する複数の検知領域、及び、その検知順序を設定する。検知装置2は、何れかの検知領域で設定装置により設定された検知順序とは異なる順序で検知対象が検知されると異常と判定して報知命令を出力する異常判定部8を備えている。
【0040】
これにより、作業検知システムでは、距離画像内に設定された複数の検知領域で、設定された検知順序とは異なる順序で検知対象が検知されるか否かで、作業内容の異常を検知することができる。しかも、設定装置は、1つの距離画像センサ1で撮影された距離画像内に複数の検知領域を設定できるので、複数の検知領域で検知対象を検出するために複数のセンサを用意する必要が無く、システム全体のコストを低減することができる。また距離画像センサ1によって撮影された距離画像をもとに異常の有無を検知しているので、作業主体が作業を行う作業領域にセンサを設置しなくてもよく、作業主体による作業を妨げることがない。
【0041】
また本実施形態では、設定装置(設定部7からなる)が、少なくとも1つの検知領域を開始領域A1として設定し、開始領域A1で検知対象が検出されると、異常判定部8が異常判定動作を開始している。
【0042】
これにより、作業を開始するタイミング(すなわち異常判定処理を開始するタイミング)を異常判定部8に入力するために作業主体が操作するスタートボタンを設置する必要がなく、距離画像をもとに作業開始のタイミングを与えることができる。
【0043】
尚、検知対象の作業が開始されていない状態でも異常判定部8による異常判定動作は行い、報知装置による報知動作のみ停止する場合、開始領域A1で検知対象が検出されると、検知装置2が報知装置による報知動作を開始させればよい。すなわち、開始領域A1で検知対象が検出されると、検知装置2が、停止中の異常判定動作又は報知動作を開始させればよい。
【0044】
これにより、作業を開始するタイミング(すなわち異常判定動作又は報知動作の何れかを開始するタイミング)を異常判定部8に入力するために作業主体が操作するスタートボタンを設置する必要がなく、距離画像をもとに作業開始のタイミングを与えることができる。
【0045】
なお本実施形態では設定装置(設定部7からなる)が、特定の検知領域を開始領域A1として設定しているが、距離画像内の全ての領域を開始領域として設定してもよく、何れかの開始領域で検知対象が検出されると、検知装置2は、停止中の異常判定動作又は報知動作を開始させる。
【0046】
これにより、作業を開始するタイミング(すなわち異常判定処理を開始するタイミング)を異常判定部8に入力するために作業主体が操作するスタートボタンを設置する必要がなく、距離画像をもとに作業開始のタイミングを与えることができる。また、距離画像内の全ての領域が開始領域として設定された場合、どの領域で検知対象が検知されても、停止中の異常判定動作又は報知動作が開始されるので、特定の検知領域を開始領域とする場合に比べて、操作性が向上するという利点がある。
【0047】
また本実施形態では、異常判定部8によって異常が発生したと判定されると、異常と判定された検知対象の検知履歴を第1記憶装置(記憶部9からなる)が記憶する。
【0048】
これにより、作業者は、第1記憶装置に記憶された検知履歴をもとに、作業中にどこでどのようなミスが発生したのかを確認でき、対策を検討することができる。なお本実施形態では、異常を検知した回数や、異常が発生した時刻や、異常が発生した工程や、異常発生時の距離画像及び可視光画像や、異常発生時に撮影された動画などが第1記憶装置に記憶されている。また本実施形態では検知装置2の記憶部9で第1記憶装置が構成されているが、第1記憶装置は検知装置2以外に設けられていてもよい。
【0049】
ところで、上述の作業検知システムでは、1サイクルの作業に対応する複数の作業工程の検知順序を全て設定し、設定された検知順序で検知対象が検知されなかった場合は異常と判定しているが、異常判定方法は上記の方法に限定されるものではない。
【0050】
例えば1サイクルの作業に対応して複数の作業工程があり、その作業の最後に実施される作業工程は決まっているが、途中の作業工程の順番が前後してもよい場合は以下のような方法で異常を判定することができる。図3で説明した梱包作業では箱B1,B2,B3,B4から順番に1個ずつ部品を取り出して箱B10に入れていたが、部品を取り出す箱の順序を問わない場合、異常判定部8は、箱B10を含む検知領域で検知対象を4回検知した時点で異常判定を行い、それまでに他の箱B1〜B4で検知対象が検知されていれば作業が正常に行われたと判断する。
【0051】
また作業者は箱B1,B2,B3,B4から1個ずつ取り出した部品をトレー(図示せず)に入れ、最後に箱B10に移し替えてもよい。この場合でも、部品を取り出す箱B1〜B4の順番は前後してもよく、最後に箱B10に部品を入れる前に他の箱B1〜B4で作業者が検知されていれば作業が正常に行われたと判断でき、何れかの箱B1〜B4で作業者が検知されていなければ部品の取り忘れが発生したと判断できる。この場合の作業検知システムの検知動作について以下に説明する。先ず設定作業者は入力装置3を操作し、1サイクルの作業に対応する複数の検知領域と、これら複数の検知領域のうち作業の最後に検知対象が検出される検知領域とを入力する。この時、設定部7は、1サイクルの作業に対応付けて複数の検知領域を記憶し、さらに上記作業の最後に検知される検知領域を判定領域として記憶する。そして、異常判定部8は、異常判定処理を開始後(つまり検知対象の作業が開始された後)に判定領域で検知対象が検出されると、同じ1サイクルの作業に対応する他の検知領域で検知対象が検知されているか否かを判定する。この判定において他の検知領域の何れかで検知対象が検出されていなければ、異常判定部8は作業内容に異常が発生したと判断して報知命令を出力し、他の全ての検知領域で検知対象が検出されていれば、異常判定部8は作業が正常に行われたと判断する。
【0052】
このように、設定装置(設定部7からなる)は、1サイクルの作業に対応する複数の検知領域のうち、上記作業の最後に検知対象が検出される検知領域を判定領域として設定する。そして、異常判定部8は、判定領域で検知対象が検出された時点で、同じ1サイクルの作業に対応する他の検知領域の何れかで検知対象が検出されていなければ、異常と判定して報知命令を出力する。
【0053】
これにより、途中の作業工程の順番が前後してもよいような作業にも対応でき、作業終了時に何れかの検知領域で検知対象が検出されなかったことから、作業に抜けが発生したことを検出することができる。
【0054】
また上述の作業検知システムは、作業領域を含む空間に音を出力する音出力装置4を備えているが、検知装置2が検知領域で検知対象を検出した際に、音出力装置4が、検知対象の検出された検知領域毎に異なる音を出力してもよい。
【0055】
これにより、音出力装置4から出力される音をもとに、作業者は正しく作業が行われていることを確認でき、何も音が出力されない場合に比べ、作業者は、作業内容が正しいことを確認しながら作業を行うことができる。また、所定の検知順序で検知対象が検出された場合に音出力装置から出力される音が一定のメロディー(例えばド、レ、ミ、ファ…)を形成するように検知領域毎の音を設定しておけば、作業内容に異常が発生すると、そのメロディーが崩れてしまうので、作業者は異常の発生を容易に理解できる。また正しい検知順序で作業が行われていれば、音出力装置から出力される音でメロディーが形成され、このメロディーが作業者による作業のペースメーカとなるため、作業中のミスの低減や、作業能率の向上が期待できる。
【0056】
また上述の作業検知システムにおいて、検知装置2が、複数の検知領域のうち予め設定された検知領域で検知対象を検出すると、作業内容を音声で説明する音声メッセージを音出力装置4から出力させるようにしてもよい。ここにおいて、検知装置2と音出力装置4とで作業支援装置が構成される。
【0057】
このように作業支援装置は、所定の検知領域で検知対象を検出すると、これから行う作業内容を音声で作業者に説明するので、作業に習熟していない作業者でも作業が行え、また作業ミスの発生を低減できる。また作業者は、実際に作業を行いながら作業内容の説明を受けることができるので、作業内容を習得しやすく、本システムを作業者の教育訓練用にも利用することもできる。
【0058】
また上述の作業検知システムにおいて、照射装置5が、光を照射する検知領域を検知順序にしたがって所定のタイミングで切り替えるようにしてもよい。照射装置5はプロジェクタからなり、検知装置2からの制御命令を受けて、指定された検知領域に光を照射する。図6(a)に示すように照射装置5は作業領域の全体を含む領域C0を照射領域とし、箱B1,B2,B3,B4,B10をそれぞれ含む領域C1,C2,C3,C4,C10に対して個別に光を照射することができる。
【0059】
ここで、検知装置2では、開始領域A1において作業者を検出すると作業開始と判断し、予め設定された検知順序に従って、各検知領域に対応した領域(領域C1,C2,C3,C4,C10の何れか)に所定のタイミングで光を照射するよう照射装置5を制御する。例えば図3に示す梱包作業の場合、検知装置2は照射装置5を制御し、作業工程の順番にしたがって領域C1→C10→C2→C10→C3→C10→C4→C10の順番に、所定のタイミングで照射光を切り替える。
【0060】
これにより、作業者は照射装置5からの照射光にしたがって作業を進めていくことができ、作業に習熟していない作業者でも作業が行え、また作業の抜けが発生する可能性を低減できる。
【0061】
また検知装置2では、複数の検知領域のうち予め設定された検知領域で検知対象が検出されると、次の作業工程に対応した検知領域に光を照射させるように照射装置5を制御してもよい。
【0062】
このように、照射装置5は、予め設定された検知領域で検知対象が検出されると検知順序における次の検知領域に光を照射することも好ましく、作業者は、照射装置5の照射光をもとに次に作業を行う検知領域を確認でき、作業ミスが発生する可能性を低減できる。
【0063】
また検知装置2では、何れかの検知領域で検知順序とは異なる順序で検知対象が検知されると、異なる順序で検知対象が検知された検知領域と、他の検知領域とに、異なる光を照射させるように照射装置5を制御してもよい。例えば検知装置2は、異なる順序で検知対象が検知された検知領域に照射する光を点滅させ、他の検知領域に照射する光は点滅させないように照射装置5を制御してもよい。また検知装置2は、異なる順序で検知対象が検知された検知領域に照射する光を赤色光とし、他の検知領域に照射する光を白色光とするように照射装置5を制御してもよい。また検知装置2は、異なる順序で検知対象が検知された検知領域に照射される光と、他の検知領域に照射される光とで、点滅の有無と光色の両方を異ならせてもよい。
【0064】
このように、照射装置5は、何れかの検知領域で検知順序とは異なる順序で検知対象が検知されると、異なる順序で検知対象が検知された検知領域と、他の検知領域とに、異なる光を照射することも好ましい。これにより、作業内容に異常が発生したことを視覚的に確認できるため、騒音の大きな作業現場でも作業者に対して作業内容に異常が発生したことを確実に報知することができる。
【0065】
ここで、本システムに用いられる照射装置5は、光の照射範囲が複数の検知領域を含むものであり、照射範囲の一部に照射される光を制限することによって、任意の検知領域に光を照射させている。つまり、指定された検知領域外の光を制限することで相対的に指定された検知領域に強い光を照射し、指定された検知領域を目立たせる。なお、指定された検知領域外の光を制限するというのは完全に光を遮断してもよいが、光を弱くするという方法でもよい。
【0066】
これにより、1台の照射装置5で複数の検知領域に光を照射できるので、検知領域毎に光源を設置する場合に比べて照射装置5の台数が少なくて済むからコストダウンを図ることができる。また照射装置5にはプロジェクタが用いられ、照射範囲内で光を照射する領域を選択できるので、照射方向を変える機構を備える必要が無い。
【0067】
尚、照射装置5はプロジェクタに限定されるものではなく、図6(b)に示すように検知領域毎に設けられ、検知装置2から無線送信された制御信号によって点灯制御される無線式LEDなどのランプL1,L2,L3,L4,L10で照射装置5を構成してもよい。
【0068】
また本実施形態の作業検知システムにおいて、検知装置2が、1サイクルの作業に対応する複数の検知領域のうち何れかの検知領域で検知対象が検知されてから、全ての前記検知領域で検知対象を検知し終えるまでの作業時間を測定し、測定結果を記憶部9(第2記憶装置)に記憶させてもよい。なお、1サイクルの作業としては、例えば複数のワークを取り出して箱につめるまでの梱包作業が1サイクルの作業として設定される。検知装置2は、1サイクルの作業の最初の検知領域で検知対象が検知されてから最後の検知領域で検知対象が検知されるまでの時間を測定して記憶することで、1サイクルの作業時間を記憶することができる。また検知装置2は、1サイクルの作業において作業順序の途中から終了までの作業時間、作業順序の最初から途中までの作業時間、或いは、作業順序内のある作業工程から別の作業工程までの作業時間を測定して記憶してもよい。ここにおいて、検知装置2から作業時間測定装置が構成される。
【0069】
このように、1サイクルの作業に対応する複数の検知領域のうち何れかの検知領域で検知対象が検知されてから、全ての検知領域で検知対象を検知し終えるまでの作業時間を測定する作業時間測定装置と、作業時間測定部によって測定された作業時間を記憶する第2記憶装置とを備えることも好ましい。これにより、1乃至複数の作業工程にかかる作業時間を把握でき、作業時間の測定結果を作業工程の改善に役立てることができる。
【符号の説明】
【0070】
1 距離画像センサ
2 検知装置
4 音出力装置
5 照射装置
7 設定部(設定装置)
8 異常判定部
9 記憶部(第1記憶装置、第2記憶装置)
【技術分野】
【0001】
本発明は、作業検知システムに関するものである。
【背景技術】
【0002】
従来、製造装置においてワークの位置を検出するためにファイバセンサを備えたものが提案されている(例えば特許文献1参照)。ファイバセンサは、発光部と、発光部から照射された光を受光する受光部を備え、発光部から照射された光が、検出対象のウェーハに設けられたウェーハノッチを通過して受光部に受光されることで、ウェーハノッチの位置を検出している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−340306号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、製造現場において特許文献1に開示されたファイバセンサを用いて各工程でワークや作業者の位置を検出する場合、検知領域を挟んでファイバセンサの発光部と受光部を配置する必要があり、ファイバセンサが作業の邪魔になるという問題があった。
【0005】
本発明は上記課題に鑑みて為されたものであり、その目的とするところは、ワークや作業者の作業に干渉する可能性を低減できる作業検知システムを提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本願の作業検知システムは、距離画像センサと検知装置と報知装置と設定装置とを備える。距離画像センサは作業領域の距離画像を出力する。検知装置は、距離画像に現れる作業主体又は作業主体が扱うワークを検知対象とし、距離画像をもとに作業内容の異常を検知すると報知命令を出力する。報知装置は報知命令が入力されると報知動作を行う。設定装置は、距離画像内で検知装置が検知対象の存否を検知する複数の検知領域及びその検知順序を設定する。検知装置は、何れかの検知領域で検知順序とは異なる順序で検知対象が検知されると異常と判定して報知命令を出力する異常判定部を備える。
【0007】
この作業検知システムにおいて、設定装置は、1サイクルの作業に対応する複数の検知領域のうち、1サイクルの作業の最後に検知対象が検出される検知領域を判定領域として設定することも好ましい。異常判定部は、判定領域で検知対象が検出された時点で、同じ1サイクルの作業に対応する他の検知領域の何れかで検知対象が検出されていなければ、異常と判定して報知命令を出力する。
【0008】
この作業検知システムにおいて、設定装置は、少なくとも1つの検知領域を開始領域として設定し、開始領域で検知対象が検出されると異常判定部による判定動作又は報知装置による報知動作を開始することも好ましい。
【0009】
この作業検知システムにおいて、設定装置は、距離画像センサが出力する距離画像内の全ての領域を開始領域として設定し、開始領域で検知対象が検出されると異常判定部による判定動作又は報知装置による報知動作を開始することも好ましい。
【0010】
この作業検知システムにおいて、検知装置が検知領域で検知対象を検出した際に検知領域毎に異なる音を出力させる音出力装置を備えることも好ましい。
【0011】
この作業検知システムにおいて、異常判定部により異常が発生したと判定されると、異常と判定された検知対象の検知履歴を記憶する第1記憶装置を備えることも好ましい。
【0012】
この作業検知システムにおいて、複数の検知領域のうち予め設定された検知領域で検知対象が検出されると、作業内容を音声で説明する作業支援装置を備えることも好ましい。
【0013】
この作業検知システムにおいて、検知領域に光を照射する照射装置を備え、照射装置は、光を照射する検知領域を検知順序にしたがって所定のタイミングで切り替えることも好ましい。
【0014】
この作業検知システムにおいて、検知領域に光を照射する照射装置を備え、照射装置は、複数の検知領域のうち予め設定された検知領域で検知対象が検出されると、検知順序における次の検知領域に光を照射することも好ましい。
【0015】
この作業検知システムにおいて、検知領域に光を照射する照射装置を備え、照射装置は、何れかの検知領域で検知順序とは異なる順序で検知対象が検知されると、異なる順序で検知対象が検知された検知領域と、他の検知領域とに、異なる光を照射することも好ましい。
【0016】
この作業検知システムにおいて、照射装置は、光の照射範囲が複数の検知領域を含むものであり、照射範囲の一部に照射される光を制限することによって、任意の検知領域に光を照射させることも好ましい。
【0017】
この作業検知システムにおいて、1サイクルの作業に対応する複数の検知領域のうち何れかの検知領域で検知対象が検知されてから、全ての検知領域で検知対象を検知し終えるまでの作業時間を測定する作業時間測定装置と、作業時間測定部によって測定された作業時間を記憶する第2記憶装置とを備えることも好ましい。
【発明の効果】
【0018】
本発明によれば、ワークや作業主体の作業に干渉する可能性を低減できる。
【図面の簡単な説明】
【0019】
【図1】本実施形態の作業検知システムのブロック図である。
【図2】同上が適用された作業領域を示し、(a)は正面図、(b)は側面図である。
【図3】(a)〜(e)は検知対象の作業内容の説明図である。
【図4】(a)〜(i)は作業工程毎の撮像画像の例図である。
【図5】同上の動作を説明するフローチャートである。
【図6】(a)(b)は同上の照射装置による照射領域の説明図である。
【発明を実施するための形態】
【0020】
以下では、本発明の作業検知システムが、複数のワーク(例えば完成品や取扱説明書からなる)を作業主体である作業者が箱に梱包する作業領域に適用された実施形態について図面を参照して説明する。尚、作業検知システムが適用される作業領域は以下の実施形態に限定されるものではなく、種々の作業領域に適用できる。また、以下の実施形態では人間が作業を行う場合について説明するが、作業を行う作業主体は産業用のロボットでも、人間が遠隔操作するマニピュレータでもよい。
【0021】
図2は本実施形態の作業検知システムが適用された作業台50を示し、図2(a)は作業台50の正面図、図2(b)は作業台50の側面図である。尚、以下の説明では特に断りがないかぎり、図2(a)に示す向きにおいて上下左右の方向を規定し、図2(b)における左側を前側、右側を後側として説明を行う。
【0022】
作業台50は、金属パイプを組み合わせて構成されるフレーム51と、フレーム51にそれぞれ支持された3段の棚板52,53,54を備える。下段及び中段の棚板52,53は、平面視の形状が略正方形の棚板であって、外形寸法が略同じ寸法となっている。下段の棚板52にはパーソナルコンピュータPC1が載置されている。中段の棚板53は、作業者が作業しやすい高さ位置(例えば作業者の腰付近の高さ位置)に設けられ、この棚板53上で検知対象の梱包作業が行われる。上段の棚板54は、平面視の形状が長方形状に形成されており、棚板53と左右方向の幅寸法は同じであるが、棚板53に比べて奥行き寸法が小さく、棚板53の奥側寄りに設けられ、作業者によって扱われるワークW1,W2を載せる部品棚として用いられている。フレーム51の上方には、作業者の背丈よりも高い位置に、金属パイプを組み合わせて構成された支持部55が設けられ、この支持部55に距離画像センサ1と音出力装置4と照射装置5が取り付けられている。
【0023】
図1は作業検知システムのブロック図である。作業検知システムは、距離画像センサ1と検知装置2と入力装置3と音出力装置4と照射装置5とモニタ6とを主要な構成として備えている。尚、検知装置2と入力装置3とモニタ6とは例えばノート型のパーソナルコンピュータPC1で実現されている。
【0024】
距離画像センサ1は、支持部55に取り付けられ、作業領域である中段の棚板53及び上段の棚板54を上方から撮影する。距離画像センサ1は、レーザ投影方式或いはTOF方式などの周知の測定方式で撮像範囲内に存在する物体の形状と物体までの距離を撮像し、各画素の画素値が検出対象までの距離となる距離画像を取得し、距離画像の画像データを検知装置2へ出力する。また距離画像センサ1は、撮像範囲内の2次元画像を撮影する機能も備えており、二次元画像の画像データを検知装置2へ出力する。
【0025】
入力装置3は、パーソナルコンピュータPC1が備えるキーボードやマウスなどの入力デバイスで構成される。
【0026】
音出力装置4は、作業領域を含む空間に音を出力するスピーカ(図示せず)を有し、スピーカを下側に向けて支持部55に取り付けられ、異常の発生を報知する報知音などの音を下方に向けて出力する。
【0027】
照射装置5は、例えば液晶プロジェクタからなり、支持部55に取り付けられ、上段の棚板54及び中段の棚板53を光の投影範囲とする。照射装置5は、投影範囲の一部に照射される光を制限することによって、棚板53及び棚板54の所望の位置に光を照射する。
【0028】
ここにおいて、音出力装置4と照射装置5とで、検知装置からの報知命令にしたがって音及び光で報知動作を行う報知装置が構成されているが、報知装置として音出力装置4及び照射装置5の何れか一方のみを備えていてもよい。
【0029】
モニタ6は、例えばパーソナルコンピュータPC1が備える液晶ディスプレイからなり、検知装置2によって表示内容が制御され、検知領域や検知順序を設定するための設定画面などを表示する。
【0030】
検知装置2は、距離画像センサ1から入力される距離画像に現れる作業主体(作業者の体の一部、例えば手H1)を検知対象とし、距離画像をもとに作業内容の異常を検知すると報知命令を報知装置に出力して、異常の発生を報知する。検知装置2はパーソナルコンピュータPC1の演算処理部によって構成され、演算処理部の演算機能によってそれぞれ実現された設定部7及び異常判定部8を備える。設定部7は、例えば作業者が入力装置3を用いて入力した内容をもとに、距離画像内で検知対象の存否を検知する検知領域と、その検知順序を設定する。異常判定部8は、距離画像センサ1から入力される距離画像にパターンマッチングなどの処理を施して検知対象を抽出し、何れかの検知領域で検知順序とは異なる順序で検知対象が検知されると異常と判定して報知命令を音出力装置4及び照射装置5に出力する。尚、本実施形態では検知装置2は距離画像に現れる作業主体を検知対象としているが、作業主体によって扱われるワークを検知対象としてもよいし、作業主体及び作業主体が扱うワークの両方を検知対象としてもよい。また、本実施形態では検知装置2が設定装置の機能(設定部7)を備えているが、検知装置2と別個に設定装置が設けられていてもよい。例えば設定装置が検知装置2とは別のコンピュータで構成され、設定部7を検知装置2に接続し、検知装置2に接続された設定部7から複数の検知領域及びその検知順序を設定してもよい。
【0031】
次に、本実施形態の作業検知システムによる検知動作について以下に説明する。
【0032】
図3(a)〜(e)は梱包作業の各作業工程を示す説明図であり、距離画像センサ1で撮影された距離画像P1内には部品棚となる棚板54に載せられた4つの箱B1〜B4と、棚板53に載せられた箱B10が映されている。4つの箱B1〜B4にはそれぞれ異種の部品W1〜W4が入れられており、作業者は箱B1,B2,B3,B4の順番で部品W1,W2,W3,W4を1個ずつ取り出し、箱B10に箱詰めする作業を行う。図3(a)は梱包作業を行う前の状態であり、箱B10は空になっている。図3(b)は作業者が左端の箱B1から部品W1を1個取り出して、箱B10に入れた状態を示している。図3(c)は作業者が左端から2番目の箱B2から部品W2を1個取り出して、箱B10に入れた状態を示している。図3(d)は作業者が左端から3番目の箱B3から部品W3を1個取り出して、箱B10に入れた状態を示している。図3(e)は作業者が右端の箱B4から部品W4を1個取り出して、箱B10に入れた状態を示している。図3(e)の状態は1サイクル分の梱包作業が終了した状態であり、箱B10には4種類の部品W1〜W4が1個ずつ入れられている。
【0033】
作業検知システムが上記の梱包作業の検査を行う場合、先ず設定部7によって、梱包作業の各工程で検知対象が現れる検知領域とその検知順序が設定される。すなわち設定作業者が、入力装置3を操作し、梱包作業の作業工程に基づいて各工程で作業者が検知される検知領域とその検知順序とを設定すると、設定部7はその設定内容を記憶部9に記憶させている。図4(a)〜(i)は上記の梱包作業において異常の有無を判定する処理を説明する説明図であり、距離画像P1内で部品を収めた箱B1〜B4と、部品が箱詰めされる箱B10が検知領域として設定されている。また、作業開始時に作業者が手H1を置く検知領域が開始領域A1として設定されている。
【0034】
図5は異常判定部8による判定処理を説明するフローチャートであり、検知装置2には、距離画像センサ1から所定の時間間隔で撮影された距離画像が入力される(ステップS1)。異常判定部8は、距離画像センサ1から距離画像が入力されると、異常判定処理の実施中か否かを判定する(ステップS2)。
【0035】
ステップS2において異常判定処理の停止中と判定されると(ステップS2のNo)、異常判定部8は開始領域A1で作業者が検知されるか否かを判定する(ステップS3)。図4(a)に示すように作業者は1サイクル分の梱包作業を開始する毎に開始領域A1に手H1を置いており、異常判定部8は、開始領域A1で作業者が検知されたことから作業開始と判断し、異常判定処理を開始する(ステップS4)。尚、ステップS3の判定で開始領域A1に検知対象がいないと判定された場合、異常判定部8はステップS1に戻って、距離画像の入力待ちの状態となる。
【0036】
一方、ステップS2において異常判定中と判定されると、異常判定部8は、検知領域で作業者が検知さるか否かを判定し(ステップS5)、何れの検知領域でも作業者が検知されなければ、ステップS1に戻って、距離画像の入力待ちの状態となる。またステップS5において検知領域で作業者が検知された場合、異常判定部8は、作業者が検出された検知領域の順番が、設定部7によって予め設定された検知順序と異なっているか否かを判定する(ステップS6)。図3で説明した梱包作業を作業者が行う場合、図4(b)〜(i)に示すように、作業者の手H1が、箱B1→箱B10→箱B2→箱B10→箱B3→箱B10→箱B4→箱B10の順番で検出されることになる。ここで、距離画像から作業者が実際に検知された検知領域の順番が、作業工程に従って設定された検知順序と異なっている場合(ステップS6のYes)、異常判定部8は、この作業工程で予め決められた作業内容とは異なる作業が行われたと判断する。この時、異常判定部8は、報知命令を音出力装置4及び照射装置5に出力し、異常と判定された検知対象の検知履歴を記憶部9(第1記憶装置)に記憶させる。音出力装置4は、報知命令が入力されると、所定の報知音を出力し、異常の発生を音で報知する。照射装置5は、報知命令が入力されると、例えば検知順序が異なると判定された検知領域に光を照射させ、異常の発生を光で報知する。
【0037】
またステップS6において作業者が実際に検知された検知領域の順番が所定の検知順序と同じであった場合(ステップS6のNo)、異常判定部8は梱包作業が1サイクル分終了したか否かを判断する(ステップS8)。ここで、1サイクル分の梱包作業が終了していなければ(ステップS8のNo)、異常判定部8はステップS1に戻って距離画像の入力待ちの状態となり、1サイクル分の梱包作業が終了していれば(ステップS8のYes)、異常判定部8は異常判定処理を終了する。
【0038】
尚、図3で説明した梱包作業では箱B1,B2,B3,B4から部品を1個とる毎に箱B10に入れていたが、箱B1,B2,B3,B4から1個ずつ取り出した部品をトレー(図示せず)に入れ、最後にトレーから箱B10へと移し替えてもよい。この場合の検知順序は、箱B1→箱B2→箱B3→箱B4→箱B10となり、異常判定部8は、何れかの検知領域において、上記の検知順序とは異なる順序で検知対象が検出されると、異常が発生したと判定する。
【0039】
以上説明したように、作業検知システムは、距離画像センサ1と、検知装置2と、報知装置(本実施形態では音出力装置4及び照射装置5からなる)と、設定装置(本実施形態では設定部7からなる)とを備える。距離画像センサ1は作業領域の距離画像を出力する。検知装置2は、距離画像センサ1によって撮影された距離画像に現れる作業主体又は作業主体が扱うワークを検知対象とし、距離画像をもとに作業内容の異常を検知すると報知命令を出力する。報知装置は、報知命令が入力されると報知動作を行う。設定装置は、距離画像内で検知装置2が検知対象の存否を検知する複数の検知領域、及び、その検知順序を設定する。検知装置2は、何れかの検知領域で設定装置により設定された検知順序とは異なる順序で検知対象が検知されると異常と判定して報知命令を出力する異常判定部8を備えている。
【0040】
これにより、作業検知システムでは、距離画像内に設定された複数の検知領域で、設定された検知順序とは異なる順序で検知対象が検知されるか否かで、作業内容の異常を検知することができる。しかも、設定装置は、1つの距離画像センサ1で撮影された距離画像内に複数の検知領域を設定できるので、複数の検知領域で検知対象を検出するために複数のセンサを用意する必要が無く、システム全体のコストを低減することができる。また距離画像センサ1によって撮影された距離画像をもとに異常の有無を検知しているので、作業主体が作業を行う作業領域にセンサを設置しなくてもよく、作業主体による作業を妨げることがない。
【0041】
また本実施形態では、設定装置(設定部7からなる)が、少なくとも1つの検知領域を開始領域A1として設定し、開始領域A1で検知対象が検出されると、異常判定部8が異常判定動作を開始している。
【0042】
これにより、作業を開始するタイミング(すなわち異常判定処理を開始するタイミング)を異常判定部8に入力するために作業主体が操作するスタートボタンを設置する必要がなく、距離画像をもとに作業開始のタイミングを与えることができる。
【0043】
尚、検知対象の作業が開始されていない状態でも異常判定部8による異常判定動作は行い、報知装置による報知動作のみ停止する場合、開始領域A1で検知対象が検出されると、検知装置2が報知装置による報知動作を開始させればよい。すなわち、開始領域A1で検知対象が検出されると、検知装置2が、停止中の異常判定動作又は報知動作を開始させればよい。
【0044】
これにより、作業を開始するタイミング(すなわち異常判定動作又は報知動作の何れかを開始するタイミング)を異常判定部8に入力するために作業主体が操作するスタートボタンを設置する必要がなく、距離画像をもとに作業開始のタイミングを与えることができる。
【0045】
なお本実施形態では設定装置(設定部7からなる)が、特定の検知領域を開始領域A1として設定しているが、距離画像内の全ての領域を開始領域として設定してもよく、何れかの開始領域で検知対象が検出されると、検知装置2は、停止中の異常判定動作又は報知動作を開始させる。
【0046】
これにより、作業を開始するタイミング(すなわち異常判定処理を開始するタイミング)を異常判定部8に入力するために作業主体が操作するスタートボタンを設置する必要がなく、距離画像をもとに作業開始のタイミングを与えることができる。また、距離画像内の全ての領域が開始領域として設定された場合、どの領域で検知対象が検知されても、停止中の異常判定動作又は報知動作が開始されるので、特定の検知領域を開始領域とする場合に比べて、操作性が向上するという利点がある。
【0047】
また本実施形態では、異常判定部8によって異常が発生したと判定されると、異常と判定された検知対象の検知履歴を第1記憶装置(記憶部9からなる)が記憶する。
【0048】
これにより、作業者は、第1記憶装置に記憶された検知履歴をもとに、作業中にどこでどのようなミスが発生したのかを確認でき、対策を検討することができる。なお本実施形態では、異常を検知した回数や、異常が発生した時刻や、異常が発生した工程や、異常発生時の距離画像及び可視光画像や、異常発生時に撮影された動画などが第1記憶装置に記憶されている。また本実施形態では検知装置2の記憶部9で第1記憶装置が構成されているが、第1記憶装置は検知装置2以外に設けられていてもよい。
【0049】
ところで、上述の作業検知システムでは、1サイクルの作業に対応する複数の作業工程の検知順序を全て設定し、設定された検知順序で検知対象が検知されなかった場合は異常と判定しているが、異常判定方法は上記の方法に限定されるものではない。
【0050】
例えば1サイクルの作業に対応して複数の作業工程があり、その作業の最後に実施される作業工程は決まっているが、途中の作業工程の順番が前後してもよい場合は以下のような方法で異常を判定することができる。図3で説明した梱包作業では箱B1,B2,B3,B4から順番に1個ずつ部品を取り出して箱B10に入れていたが、部品を取り出す箱の順序を問わない場合、異常判定部8は、箱B10を含む検知領域で検知対象を4回検知した時点で異常判定を行い、それまでに他の箱B1〜B4で検知対象が検知されていれば作業が正常に行われたと判断する。
【0051】
また作業者は箱B1,B2,B3,B4から1個ずつ取り出した部品をトレー(図示せず)に入れ、最後に箱B10に移し替えてもよい。この場合でも、部品を取り出す箱B1〜B4の順番は前後してもよく、最後に箱B10に部品を入れる前に他の箱B1〜B4で作業者が検知されていれば作業が正常に行われたと判断でき、何れかの箱B1〜B4で作業者が検知されていなければ部品の取り忘れが発生したと判断できる。この場合の作業検知システムの検知動作について以下に説明する。先ず設定作業者は入力装置3を操作し、1サイクルの作業に対応する複数の検知領域と、これら複数の検知領域のうち作業の最後に検知対象が検出される検知領域とを入力する。この時、設定部7は、1サイクルの作業に対応付けて複数の検知領域を記憶し、さらに上記作業の最後に検知される検知領域を判定領域として記憶する。そして、異常判定部8は、異常判定処理を開始後(つまり検知対象の作業が開始された後)に判定領域で検知対象が検出されると、同じ1サイクルの作業に対応する他の検知領域で検知対象が検知されているか否かを判定する。この判定において他の検知領域の何れかで検知対象が検出されていなければ、異常判定部8は作業内容に異常が発生したと判断して報知命令を出力し、他の全ての検知領域で検知対象が検出されていれば、異常判定部8は作業が正常に行われたと判断する。
【0052】
このように、設定装置(設定部7からなる)は、1サイクルの作業に対応する複数の検知領域のうち、上記作業の最後に検知対象が検出される検知領域を判定領域として設定する。そして、異常判定部8は、判定領域で検知対象が検出された時点で、同じ1サイクルの作業に対応する他の検知領域の何れかで検知対象が検出されていなければ、異常と判定して報知命令を出力する。
【0053】
これにより、途中の作業工程の順番が前後してもよいような作業にも対応でき、作業終了時に何れかの検知領域で検知対象が検出されなかったことから、作業に抜けが発生したことを検出することができる。
【0054】
また上述の作業検知システムは、作業領域を含む空間に音を出力する音出力装置4を備えているが、検知装置2が検知領域で検知対象を検出した際に、音出力装置4が、検知対象の検出された検知領域毎に異なる音を出力してもよい。
【0055】
これにより、音出力装置4から出力される音をもとに、作業者は正しく作業が行われていることを確認でき、何も音が出力されない場合に比べ、作業者は、作業内容が正しいことを確認しながら作業を行うことができる。また、所定の検知順序で検知対象が検出された場合に音出力装置から出力される音が一定のメロディー(例えばド、レ、ミ、ファ…)を形成するように検知領域毎の音を設定しておけば、作業内容に異常が発生すると、そのメロディーが崩れてしまうので、作業者は異常の発生を容易に理解できる。また正しい検知順序で作業が行われていれば、音出力装置から出力される音でメロディーが形成され、このメロディーが作業者による作業のペースメーカとなるため、作業中のミスの低減や、作業能率の向上が期待できる。
【0056】
また上述の作業検知システムにおいて、検知装置2が、複数の検知領域のうち予め設定された検知領域で検知対象を検出すると、作業内容を音声で説明する音声メッセージを音出力装置4から出力させるようにしてもよい。ここにおいて、検知装置2と音出力装置4とで作業支援装置が構成される。
【0057】
このように作業支援装置は、所定の検知領域で検知対象を検出すると、これから行う作業内容を音声で作業者に説明するので、作業に習熟していない作業者でも作業が行え、また作業ミスの発生を低減できる。また作業者は、実際に作業を行いながら作業内容の説明を受けることができるので、作業内容を習得しやすく、本システムを作業者の教育訓練用にも利用することもできる。
【0058】
また上述の作業検知システムにおいて、照射装置5が、光を照射する検知領域を検知順序にしたがって所定のタイミングで切り替えるようにしてもよい。照射装置5はプロジェクタからなり、検知装置2からの制御命令を受けて、指定された検知領域に光を照射する。図6(a)に示すように照射装置5は作業領域の全体を含む領域C0を照射領域とし、箱B1,B2,B3,B4,B10をそれぞれ含む領域C1,C2,C3,C4,C10に対して個別に光を照射することができる。
【0059】
ここで、検知装置2では、開始領域A1において作業者を検出すると作業開始と判断し、予め設定された検知順序に従って、各検知領域に対応した領域(領域C1,C2,C3,C4,C10の何れか)に所定のタイミングで光を照射するよう照射装置5を制御する。例えば図3に示す梱包作業の場合、検知装置2は照射装置5を制御し、作業工程の順番にしたがって領域C1→C10→C2→C10→C3→C10→C4→C10の順番に、所定のタイミングで照射光を切り替える。
【0060】
これにより、作業者は照射装置5からの照射光にしたがって作業を進めていくことができ、作業に習熟していない作業者でも作業が行え、また作業の抜けが発生する可能性を低減できる。
【0061】
また検知装置2では、複数の検知領域のうち予め設定された検知領域で検知対象が検出されると、次の作業工程に対応した検知領域に光を照射させるように照射装置5を制御してもよい。
【0062】
このように、照射装置5は、予め設定された検知領域で検知対象が検出されると検知順序における次の検知領域に光を照射することも好ましく、作業者は、照射装置5の照射光をもとに次に作業を行う検知領域を確認でき、作業ミスが発生する可能性を低減できる。
【0063】
また検知装置2では、何れかの検知領域で検知順序とは異なる順序で検知対象が検知されると、異なる順序で検知対象が検知された検知領域と、他の検知領域とに、異なる光を照射させるように照射装置5を制御してもよい。例えば検知装置2は、異なる順序で検知対象が検知された検知領域に照射する光を点滅させ、他の検知領域に照射する光は点滅させないように照射装置5を制御してもよい。また検知装置2は、異なる順序で検知対象が検知された検知領域に照射する光を赤色光とし、他の検知領域に照射する光を白色光とするように照射装置5を制御してもよい。また検知装置2は、異なる順序で検知対象が検知された検知領域に照射される光と、他の検知領域に照射される光とで、点滅の有無と光色の両方を異ならせてもよい。
【0064】
このように、照射装置5は、何れかの検知領域で検知順序とは異なる順序で検知対象が検知されると、異なる順序で検知対象が検知された検知領域と、他の検知領域とに、異なる光を照射することも好ましい。これにより、作業内容に異常が発生したことを視覚的に確認できるため、騒音の大きな作業現場でも作業者に対して作業内容に異常が発生したことを確実に報知することができる。
【0065】
ここで、本システムに用いられる照射装置5は、光の照射範囲が複数の検知領域を含むものであり、照射範囲の一部に照射される光を制限することによって、任意の検知領域に光を照射させている。つまり、指定された検知領域外の光を制限することで相対的に指定された検知領域に強い光を照射し、指定された検知領域を目立たせる。なお、指定された検知領域外の光を制限するというのは完全に光を遮断してもよいが、光を弱くするという方法でもよい。
【0066】
これにより、1台の照射装置5で複数の検知領域に光を照射できるので、検知領域毎に光源を設置する場合に比べて照射装置5の台数が少なくて済むからコストダウンを図ることができる。また照射装置5にはプロジェクタが用いられ、照射範囲内で光を照射する領域を選択できるので、照射方向を変える機構を備える必要が無い。
【0067】
尚、照射装置5はプロジェクタに限定されるものではなく、図6(b)に示すように検知領域毎に設けられ、検知装置2から無線送信された制御信号によって点灯制御される無線式LEDなどのランプL1,L2,L3,L4,L10で照射装置5を構成してもよい。
【0068】
また本実施形態の作業検知システムにおいて、検知装置2が、1サイクルの作業に対応する複数の検知領域のうち何れかの検知領域で検知対象が検知されてから、全ての前記検知領域で検知対象を検知し終えるまでの作業時間を測定し、測定結果を記憶部9(第2記憶装置)に記憶させてもよい。なお、1サイクルの作業としては、例えば複数のワークを取り出して箱につめるまでの梱包作業が1サイクルの作業として設定される。検知装置2は、1サイクルの作業の最初の検知領域で検知対象が検知されてから最後の検知領域で検知対象が検知されるまでの時間を測定して記憶することで、1サイクルの作業時間を記憶することができる。また検知装置2は、1サイクルの作業において作業順序の途中から終了までの作業時間、作業順序の最初から途中までの作業時間、或いは、作業順序内のある作業工程から別の作業工程までの作業時間を測定して記憶してもよい。ここにおいて、検知装置2から作業時間測定装置が構成される。
【0069】
このように、1サイクルの作業に対応する複数の検知領域のうち何れかの検知領域で検知対象が検知されてから、全ての検知領域で検知対象を検知し終えるまでの作業時間を測定する作業時間測定装置と、作業時間測定部によって測定された作業時間を記憶する第2記憶装置とを備えることも好ましい。これにより、1乃至複数の作業工程にかかる作業時間を把握でき、作業時間の測定結果を作業工程の改善に役立てることができる。
【符号の説明】
【0070】
1 距離画像センサ
2 検知装置
4 音出力装置
5 照射装置
7 設定部(設定装置)
8 異常判定部
9 記憶部(第1記憶装置、第2記憶装置)
【特許請求の範囲】
【請求項1】
作業領域の距離画像を出力する距離画像センサと、
前記距離画像に現れる作業主体又は前記作業主体が扱うワークを検知対象とし、前記距離画像をもとに作業内容の異常を検知すると報知命令を出力する検知装置と、
前記報知命令が入力されると報知動作を行う報知装置と、
前記距離画像内で前記検知装置が検知対象の存否を検知する複数の検知領域及びその検知順序を設定する設定装置とを備え、
前記検知装置は、何れかの前記検知領域で前記検知順序とは異なる順序で検知対象が検知されると異常と判定して報知命令を出力する異常判定部を備えたことを特徴とする作業検知システム。
【請求項2】
前記設定装置は、1サイクルの作業に対応する複数の前記検知領域のうち、前記1サイクルの作業の最後に検知対象が検出される前記検知領域を判定領域として設定し、
前記異常判定部は、前記判定領域で検知対象が検出された時点で、同じ前記1サイクルの作業に対応する他の検知領域の何れかで検知対象が検出されていなければ、異常と判定して報知命令を出力することを特徴とする請求項1記載の作業検知システム。
【請求項3】
前記設定装置は、少なくとも1つの前記検知領域を開始領域として設定し、
前記開始領域で検知対象が検出されると前記異常判定部による判定動作又は前記報知装置による前記報知動作を開始することを特徴とする請求項1又は2記載の作業検知システム。
【請求項4】
前記設定装置は、前記距離画像センサが出力する距離画像内の全ての領域を開始領域として設定し、
前記開始領域で検知対象が検出されると前記異常判定部による判定動作又は前記報知装置による前記報知動作を開始することを特徴とする請求項1又は2記載の作業検知システム。
【請求項5】
前記検知装置が前記検知領域で検知対象を検出した際に前記検知領域毎に異なる音を出力させる音出力装置を備えたことを特徴とする請求項1乃至4の何れか1項に記載の作業検知システム。
【請求項6】
前記異常判定部により異常が発生したと判定されると、異常と判定された検知対象の検知履歴を記憶する第1記憶装置を備えたことを特徴とする請求項1乃至5の何れか1項に記載の作業検知システム。
【請求項7】
複数の前記検知領域のうち予め設定された検知領域で検知対象が検出されると、作業内容を音声で説明する作業支援装置を備えたことを特徴とする請求項1乃至6の何れか1項に記載の作業検知システム。
【請求項8】
前記検知領域に光を照射する照射装置を備え、
前記照射装置は、光を照射する検知領域を前記検知順序にしたがって所定のタイミングで切り替えることを特徴とする請求項1乃至7の何れか1項に記載の作業検知システム。
【請求項9】
前記検知領域に光を照射する照射装置を備え、
前記照射装置は、複数の前記検知領域のうち予め設定された検知領域で検知対象が検出されると、前記検知順序における次の検知領域に光を照射することを特徴とする請求項1乃至8の何れか1項に記載の作業検知システム。
【請求項10】
前記検知領域に光を照射する照射装置を備え、
前記照射装置は、何れかの前記検知領域で前記検知順序とは異なる順序で検知対象が検知されると、異なる順序で検知対象が検知された検知領域と、他の検知領域とに、異なる光を照射することを特徴とする請求項1乃至10の何れか1項に記載の作業検知システム。
【請求項11】
前記照射装置は、光の照射範囲が前記複数の検知領域を含むものであり、前記照射範囲の一部に照射される光を制限することによって、任意の前記検知領域に光を照射させることを特徴とする請求項8乃至10の何れか1項に記載の作業検知システム。
【請求項12】
1サイクルの作業に対応する複数の前記検知領域のうち何れかの前記検知領域で検知対象が検知されてから、全ての前記検知領域で検知対象を検知し終えるまでの作業時間を測定する作業時間測定装置と、前記作業時間測定部によって測定された作業時間を記憶する第2記憶装置とを備えたことを特徴とする請求項1乃至11の何れか1項に記載の作業検知システム。
【請求項1】
作業領域の距離画像を出力する距離画像センサと、
前記距離画像に現れる作業主体又は前記作業主体が扱うワークを検知対象とし、前記距離画像をもとに作業内容の異常を検知すると報知命令を出力する検知装置と、
前記報知命令が入力されると報知動作を行う報知装置と、
前記距離画像内で前記検知装置が検知対象の存否を検知する複数の検知領域及びその検知順序を設定する設定装置とを備え、
前記検知装置は、何れかの前記検知領域で前記検知順序とは異なる順序で検知対象が検知されると異常と判定して報知命令を出力する異常判定部を備えたことを特徴とする作業検知システム。
【請求項2】
前記設定装置は、1サイクルの作業に対応する複数の前記検知領域のうち、前記1サイクルの作業の最後に検知対象が検出される前記検知領域を判定領域として設定し、
前記異常判定部は、前記判定領域で検知対象が検出された時点で、同じ前記1サイクルの作業に対応する他の検知領域の何れかで検知対象が検出されていなければ、異常と判定して報知命令を出力することを特徴とする請求項1記載の作業検知システム。
【請求項3】
前記設定装置は、少なくとも1つの前記検知領域を開始領域として設定し、
前記開始領域で検知対象が検出されると前記異常判定部による判定動作又は前記報知装置による前記報知動作を開始することを特徴とする請求項1又は2記載の作業検知システム。
【請求項4】
前記設定装置は、前記距離画像センサが出力する距離画像内の全ての領域を開始領域として設定し、
前記開始領域で検知対象が検出されると前記異常判定部による判定動作又は前記報知装置による前記報知動作を開始することを特徴とする請求項1又は2記載の作業検知システム。
【請求項5】
前記検知装置が前記検知領域で検知対象を検出した際に前記検知領域毎に異なる音を出力させる音出力装置を備えたことを特徴とする請求項1乃至4の何れか1項に記載の作業検知システム。
【請求項6】
前記異常判定部により異常が発生したと判定されると、異常と判定された検知対象の検知履歴を記憶する第1記憶装置を備えたことを特徴とする請求項1乃至5の何れか1項に記載の作業検知システム。
【請求項7】
複数の前記検知領域のうち予め設定された検知領域で検知対象が検出されると、作業内容を音声で説明する作業支援装置を備えたことを特徴とする請求項1乃至6の何れか1項に記載の作業検知システム。
【請求項8】
前記検知領域に光を照射する照射装置を備え、
前記照射装置は、光を照射する検知領域を前記検知順序にしたがって所定のタイミングで切り替えることを特徴とする請求項1乃至7の何れか1項に記載の作業検知システム。
【請求項9】
前記検知領域に光を照射する照射装置を備え、
前記照射装置は、複数の前記検知領域のうち予め設定された検知領域で検知対象が検出されると、前記検知順序における次の検知領域に光を照射することを特徴とする請求項1乃至8の何れか1項に記載の作業検知システム。
【請求項10】
前記検知領域に光を照射する照射装置を備え、
前記照射装置は、何れかの前記検知領域で前記検知順序とは異なる順序で検知対象が検知されると、異なる順序で検知対象が検知された検知領域と、他の検知領域とに、異なる光を照射することを特徴とする請求項1乃至10の何れか1項に記載の作業検知システム。
【請求項11】
前記照射装置は、光の照射範囲が前記複数の検知領域を含むものであり、前記照射範囲の一部に照射される光を制限することによって、任意の前記検知領域に光を照射させることを特徴とする請求項8乃至10の何れか1項に記載の作業検知システム。
【請求項12】
1サイクルの作業に対応する複数の前記検知領域のうち何れかの前記検知領域で検知対象が検知されてから、全ての前記検知領域で検知対象を検知し終えるまでの作業時間を測定する作業時間測定装置と、前記作業時間測定部によって測定された作業時間を記憶する第2記憶装置とを備えたことを特徴とする請求項1乃至11の何れか1項に記載の作業検知システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−25478(P2013−25478A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−158165(P2011−158165)
【出願日】平成23年7月19日(2011.7.19)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月19日(2011.7.19)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]