
作業機の周囲監視装置
【課題】作業機の周囲の状況を正確且つ良好な視認性で監視して、作業機の安全性や作業効率を向上させることを目的とする。
【解決手段】上部旋回体5に複数台が設けられ、そのうち2台が相互に視野範囲を部分的に重複するように設けた複数台のカメラと、各カメラで取得したカメラ画像に基づいて上方視点となるように視点変換した仮想視点画像を生成する視点変換部23と、視点変換部23が生成した複数の仮想視点画像をそれぞれに対応した表示領域に表示するように合成した合成画像を生成する画像合成部24と、合成画像を第1の画像として、各カメラのうち何れか1つのカメラが撮影している画像であり仮想視点画像間の境界線を視野内に含む画像を第2の画像として、第1の画像と第2の画像とを含む表示画像を生成する表示画像生成部25と、表示画像を画面上に表示するモニタ14と、を備えている。
【解決手段】上部旋回体5に複数台が設けられ、そのうち2台が相互に視野範囲を部分的に重複するように設けた複数台のカメラと、各カメラで取得したカメラ画像に基づいて上方視点となるように視点変換した仮想視点画像を生成する視点変換部23と、視点変換部23が生成した複数の仮想視点画像をそれぞれに対応した表示領域に表示するように合成した合成画像を生成する画像合成部24と、合成画像を第1の画像として、各カメラのうち何れか1つのカメラが撮影している画像であり仮想視点画像間の境界線を視野内に含む画像を第2の画像として、第1の画像と第2の画像とを含む表示画像を生成する表示画像生成部25と、表示画像を画面上に表示するモニタ14と、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、作業機の安全確保等のために設けられ、作業機の周囲の状況を監視する作業機の周囲監視装置に関するものである。
【背景技術】
【0002】
作業機の一例としての油圧ショベルは、自走式の作業機であって、クローラ式またはホイール式の走行手段を有する下部走行体を備えている。下部走行体には旋回装置を介して上部旋回体が設置されている。上部旋回体には土砂の掘削等の作業を行うための作業手段が設けられている。この作業手段は、上部旋回体に俯抑動作可能に連結したブームと、このブームの先端に上下方向に回動可能に連結したアームとを備えており、土砂の掘削等の作業を行うバケットがアタッチメントとして、アームの先端にリンク機構を介して連結されている。これらにより、多関節作業機構を構成している。
【0003】
油圧ショベル等の自走式作業機において、作業の安全を確保して、作業機の操作性の向上を図るために、旋回体の周囲の状況を監視する周囲監視装置を設けたものが従来から用いられている。この周囲監視装置は、カメラを上部旋回体に装着すると共に、運転室において、オペレータ(運転者)が着座する運転室の前方位置にモニタを設置することにより構成している。このモニタにはカメラが撮影した画像が動画状態の映像として表示される。
【0004】
ところで、カメラは上部旋回体に固定的に保持されており、その視野範囲は限定されている。作業対象となる前方位置の視野が必要なのは当然のことであるが、上部旋回体の後方および左右の両側方の視野を得るために、上部旋回体には複数のカメラ装着する構成としている。これにより、上部旋回体のほぼ全周に渡る視野を確保することができ、作業の安全確保および作業機の操作性の向上を図っている。
【0005】
この種の作業機の周囲監視装置が特許文献1に開示されている。この特許文献1の技術では、油圧ショベルの右側方、左側方、後方を撮影する各カメラを設ける構成としており、各カメラの画像に対して、カメラの視点を上方に仮想的に移動したときの仮想視点画像(俯瞰画像)を表示するようにしている。この仮想視点画像を表示することにより、動的或いは固定的な障害物と作業機までの距離を正確に把握することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−248613号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1で示されるように、作業機の上方に仮想視点をおいた仮想視点画像を生成して表示することで、障害物と作業機までの距離を一見して正確に把握することができる。これにより、作業機の周囲の状況をオペレータが認識できるようになり、作業の安全性を向上させる点で極めて高い効果を奏する。特許文献1では、複数のカメラの仮想視点画像を合成してパノラマ画像を構成し、現在のパノラマ画像と過去のパノラマ画像とを重ね合わせることにより、表示用のパノラマ画像を生成している。
【0008】
ところで、パノラマ画像は複数の仮想視点画像を合成して生成されるものであるが、各仮想視点画像の元となる画像は異なる視野を撮影しているカメラになる。つまり、作業機の車体の左右側方および後方を視野とするそれぞれのカメラが撮影した画像を上方に仮想視点をおいて水平面に展開した画像が仮想視点画像になる。このとき、後方の仮想視点画像と側方の仮想視点画像との間の境界部は、後方のカメラと側方のカメラとで視野範囲が部分的に重複している。これにより、仮想視点画像で表示されない領域をなくすようにしている。
【0009】
しかし、仮想視点画像は、斜め上方から撮影しているカメラの視点を上方に仮想的に設置した場合に水平面方向に展開した画像であり、仮想視点画像間の境界部に立体物が存在する場合、その立体物の上部(地面より高い部分)が仮想視点画像から消失する可能性がある。この場合には、仮想視点画像を合成して表示したパノラマ画像において、境界部に位置している立体物の上部が表示されないことになる。従って、実際には作業機の近傍に固定的或いは動的な障害物が存在するにもかかわらず、仮想視点画像から障害物が消失し、オペレータは障害物の存在を認識することができなくなる。これにより、作業機の周囲の状況を的確に監視することができなくなる。
【0010】
また、仮想視点画像間の境界部に障害物が存在している場合、立体物の全部ではなく一部が仮想視点画像に表示されなくなることもある。この場合には、仮想視点画像から障害物の一部が消失するが、一部は仮想視点画像に出現している状態になる。ただし、仮想視点画像には障害物の一部のみが表示されており、オペレータは仮想視点画像を注意して視認していなければ、やはり障害物の存在を見落としてしまうことがある。これにより、オペレータが直感的に障害物の存在を把握できないことから、作業機の周囲の状況を十分に監視することができなくなる。
【0011】
そこで、本発明は、作業機の周囲の状況を正確且つ良好な視認性で監視して、作業機の安全性や作業効率を向上させることを目的とする。
【課題を解決するための手段】
【0012】
以上の課題を解決するため、本発明の作業機の周囲監視装置は、走行体に対して旋回可能な旋回体にフロント作業機を設けた作業機の周囲を監視するための作業機の周囲監視装置であって、前記旋回体に複数台が設けられ、そのうち2台が相互に視野範囲を部分的に重複するように設けた複数台のカメラと、前記各カメラで取得したカメラ画像に基づいて上方視点となるように視点変換した仮想視点画像を生成する視点変換部と、前記視点変換部が生成した複数の前記仮想視点画像をそれぞれに対応した表示領域に表示するように合成した合成画像を生成する画像合成部と、前記合成画像を第1の画像として、前記各カメラのうち何れか1つのカメラが撮影している画像であり前記仮想視点画像間の境界線を視野内に含む画像を第2の画像として、前記第1の画像と前記第2の画像との両者を含む表示画像を生成する表示画像生成部と、前記表示画像生成部が生成した前記表示画像を画面上に表示するモニタと、を備えていることを特徴とする。
【0013】
この作業機の周囲監視装置によれば、第1の画像と第2の画像との両者をモニタに表示することで、仮想視点画像の境界部に障害物が存在していることにより仮想視点画像から障害物の一部または全部が消失したとしても、障害物の存在を第2の画像で明確に認識することができる。これにより、オペレータに作業機の周囲の状況を正確且つ良好な視認性で認識させることができ、安全性や作業効率を向上させることができる。
【0014】
また、前記表示画像生成部は、前記第2の画像の中での前記各仮想視点画像の表示範囲を示す仮想表示範囲を前記第2の画像に対して重畳表示をすることを特徴とする。
【0015】
第2の画像の表示系で、各仮想視点画像の範囲を仮想表示範囲として重畳表示することで、この仮想表示範囲と障害物との関係で、障害物の消失の可能性をオペレータは明確に認識することができる。これにより、作業機の周囲の状況をより正確且つ良好な視認性で認識でき、安全性や作業効率を向上させることができる。
【0016】
また、前記表示画像生成部は、前記第2の画像の中での隣接する前記仮想視点画像間の領域のうち立体物の上部が消失する可能性のある範囲を示す消失範囲を前記第2の画像に対して重畳表示することを特徴とする。
【0017】
第2の画像の表示系で、隣接する仮想視点画像間の領域のうち立体物が消失する可能性のある範囲を示す消失範囲として重畳表示することで、消失範囲内に障害物が存在しているか否かにより、障害物の消失の可能性をオペレータは明確に認識できる。これにより、作業機の周囲の状況をより正確且つ良好な視認性で認識でき、安全性や作業効率を向上させることができる。
【0018】
また、前記表示画像生成部は、前記第2の画像の中での前記仮想表示範囲および隣接する前記仮想視点画像間の領域のうち立体物の上部が消失する可能性のある範囲を示す消失範囲を前記第2の画像に対して重畳表示し、前記仮想表示範囲と前記消失範囲とを異なる表示形式で表示させることを特徴とする。
【0019】
第2の画像に仮想表示範囲と消失範囲との両者を表示することで、仮想範囲および消失範囲と障害物との関係をさらに明確にオペレータは認識することができる。これにより、作業機の周囲の状況を正確且つ良好な視認性で認識でき、安全性や作業効率を向上させることができる。
【0020】
また、前記表示画像生成部は、前記第2の画像の中での前記仮想表示範囲と隣接する前記仮想視点画像間の領域のうち立体物の上部が消失する可能性のある範囲を示す消失範囲との何れか一方または両方を前記第2の画像に対して重畳表示することを可能にして、前記仮想表示範囲と前記消失範囲との両者を重畳表示するときにはこれらを異なる表示形式で表示し、前記仮想表示範囲と前記消失範囲との何れか一方を表示するモードと両者を表示するモードと何れも表示しないモードとを切り替え可能に構成したことを特徴とする。
【0021】
熟練度の低いオペレータであれば、仮想表示範囲と消失範囲との何れか一方または両方を第2の画像に重畳表示することで、障害物の消失の可能性をオペレータに認識させるアシストを行なうことができる。一方、熟練度の高いオペレータであれば、仮想表示範囲と消失範囲とを表示しなくても障害物の消失の可能性を認識することができ、却って第2の画像の視認性を低下させる。このため、オペレータの熟練度によって最適な表示態様を選択することができる。
【0022】
また、前記カメラが取得した前記カメラ画像に基づいて障害物を検出する障害物検出部を備え、前記表示画像生成部は、前記障害物検出部が検出した前記障害物の周囲に形成するマークを前記第1の画像と前記第2の画像との何れか一方または両方に重畳表示することを特徴とする。
【0023】
障害物を示すマークを第1の画像、第2の画像に重畳表示することで、仮想視点画像から障害物が部分的に消失しても、マークは表示されているため、このマークに基づいてオペレータは障害物を認識することができる。これにより、オペレータは障害物を確実に認識することができ、作業機の周囲の状況を認識することができる。
【発明の効果】
【0024】
本発明は、カメラが撮影した仮想視点画像だけでなく、この仮想視点画像を生成するための元となるカメラが撮影した画像をモニタに表示することで、仮想視点画像間の境界に立体物が存在することによって立体物の上部が消失したとしても、カメラの画像からオペレータは障害物を認識することができる。これにより、作業機の周囲の状況を正確且つ良好な視認性でオペレータに認識させることができ、作業の安全性および作業効率を向上させることができる。
【図面の簡単な説明】
【0025】
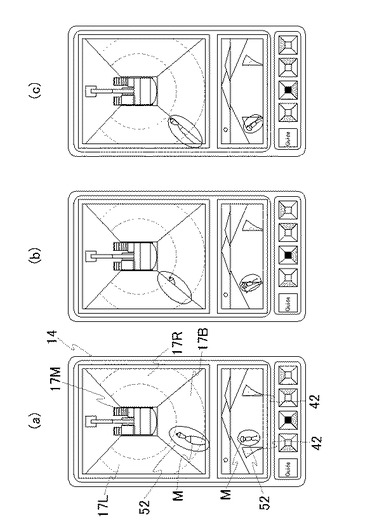
【図1】作業機の一例としての油圧ショベルを示す外観図である。
【図2】油圧ショベルの正面図である。
【図3】バケット監視カメラの画像が選択されているときのモニタの一例を示す図である。
【図4】表示コントローラおよびこれに接続される各部のブロック図である。
【図5】右方カメラの画像が選択されているときのモニタの一例を示す図である。
【図6】後方カメラの画像が選択されているときのモニタの一例を示す図である。
【図7】左方カメラの画像が選択されているときのモニタの一例を示す図である。
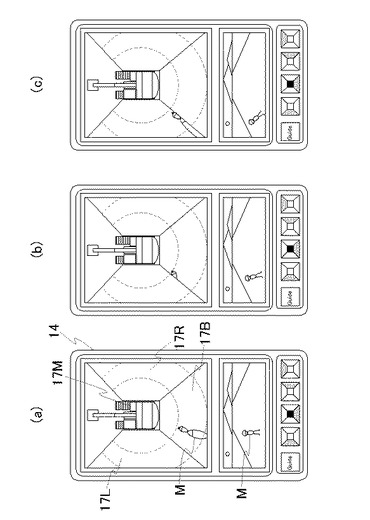
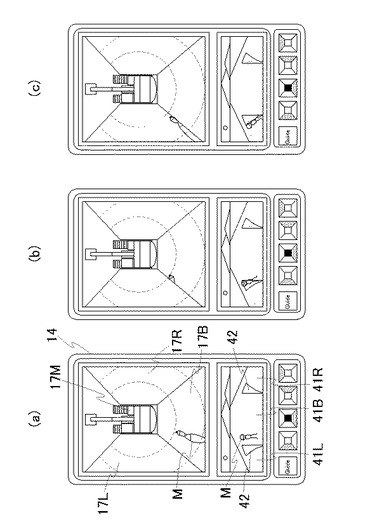
【図8】上部旋回体を旋回したときのモニタの画面例を示す図である。
【図9】各パターンにおけるカメラスルー画像に重畳表示される内容を示す図である。
【図10】パターンAにおけるモニタの画面例を示す図である。
【図11】パターンBにおけるモニタの画面例を示す図である。
【図12】パターンCにおけるモニタの画面例を示す図である。
【図13】変形例における表示コントローラおよびこれに接続される各部のブロック図である。
【図14】変形例におけるパターンDのモニタの画面例を示す図である。
【図15】変形例におけるパターンAのモニタの画面例を示す図である。
【図16】変形例におけるパターンBのモニタの画面例を示す図である。
【図17】変形例におけるパターンCのモニタの画面例を示す図である。
【発明を実施するための形態】
【0026】
以下、図面を参照して、本発明の実施形態について説明する。以下において、作業機としてクローラ走行手段を有する油圧ショベルを適用した例を説明するが、例えばホイールローダ等の油圧ショベル以外の作業機を適用することもできる。また、油圧ショベルはクローラ式の走行手段ではなく、ホイール式の走行手段を有しているものであってもよい。
【0027】
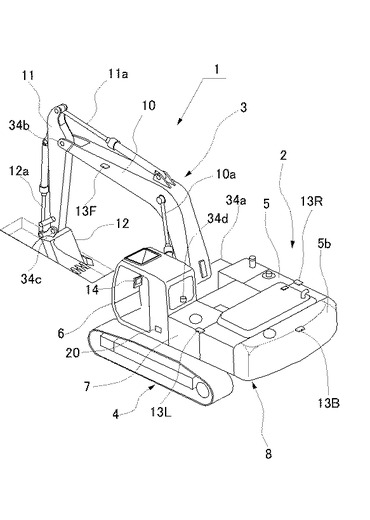
図1に示すように、油圧ショベル1は車体2とフロント作業機3とを有して構成している。車体2は下部走行体4と上部旋回体5とを有しており、下部走行体4と上部旋回体5との間には旋回装置が設けられている。上部旋回体5にはオペレータが搭乗して油圧ショベル1を操作するための運転室6が設置されており、また土砂の掘削等の作業を行うフロント作業機3が運転室6の右手において、ほぼ並ぶような位置に上部旋回体5に設けられている。上部旋回体5には、運転室6およびフロント作業機3の後方位置に建屋7等が設けられており、最後端部にはカウンタウェイト8が設置されている。
【0028】
フロント作業機3はブーム10とアーム11とバケット12とを有して構成される土砂の掘削作業手段である。ブーム10は、その基端部が上部旋回体5のフレームに連結ピンにより軸支されて俯抑動作可能となっている。ブーム10の先端にはアーム11が上下方向に回動可能に連結されており、ブーム10の先端にはバケット12が回動可能に連結されている。ブーム10の俯抑動作は油圧シリンダ10aを駆動することにより行われる。また、アーム11は油圧シリンダ11aにより、バケット12は油圧シリンダ12aにより駆動される。
【0029】
オペレータは、運転室6で前方を向いた状態で操作を行うものであり、上部旋回体5の前方には十分広い視野が確保されている。また、運転室6の左側における斜め前方の視野も確保されている。ただし、左側であっても、斜め後方については、オペレータは振り返るようにしなければ直接視認することができない。また、運転室6の右側においては、フロント作業機3が設置されており、視野のかなり部分がブーム10により妨げられ、実質的に肉眼による視認を行うことができない。
【0030】
さらに、上部旋回体5の後方については、建屋7およびカウンタウェイト8が位置しており、オペレータは運転室6の内部で振り返るようにしなければ視野を得ることができない。且つ、建屋7およびカウンタウェイト8の上面は高い位置となっており、オペレータは運転室6の内部で振り返る姿勢を取ったとしても、視野が得られるのは遠い位置であり、上部旋回体5に近い位置を視認することができない。
【0031】
そこで、上部旋回体5の後方、左側方および右側方の監視を可能にするために、監視用のカメラ13B(後方カメラ13B)、カメラ13R(右方カメラ13R)、カメラ13L(左方カメラ13L)の3台のカメラを、補助的に視野を確保するために設けている。すなわち、カウンタウェイト8の上面において、左右のほぼ中間位置に後方カメラ13Bを設置し、建屋7の左方向の上面には左方カメラ13Lを、上部旋回体5の右側の建屋7またはタンクの上面に右方カメラ13Rを設置している。
【0032】
後方カメラ13Bは上部旋回体5の後方の広い範囲の画像を取得し、この後方カメラ13Bと左方カメラ13Lと右方カメラ13Rとによって、上部旋回体5の運転室6の内部で、オペレータが無理のない姿勢で得られる前方視野を除くほぼ全周に渡る視野が得られることになる。また、アーム11の下部にはバケット12を視野とするカメラ13F(バケット監視カメラ13F)が設けられている。
【0033】
各カメラ13B、13R、13Lのレンズの視野角とそれらの配設位置とによって、少なくとも各レンズの視野範囲の一部がオーバラップするように設定されている。具体的には、後方カメラ13Bの視野角の左右の両側部分が左右のカメラ13R、13Lの視野角とが部分的に重複するようにしている。これにより、上部旋回体5の周囲において、ブラインドとなる箇所がなくなる。
【0034】
そして、運転室6の内部にはモニタ14が設置されており、各カメラ13B、13R、13Lから取得した画像がモニタ14に動画状態にして表示される。モニタ14には、各カメラ13B、13R、13Lで取得したカメラ画像がそのままの画像(カメラスルー画像)として表示され、且つ上方視点となるように視点変換された画像(仮想視点画像)としても表示される。カメラスルー画像と仮想視点画像とは1つの画面で両者が同時に表示される。
【0035】
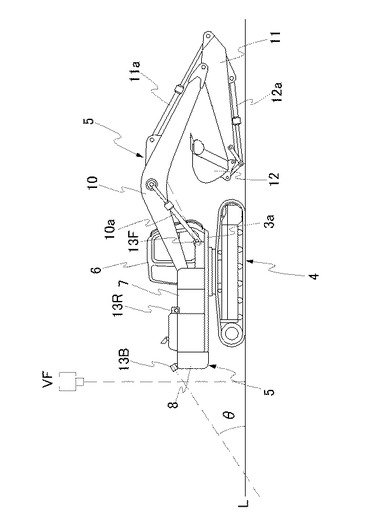
ここで、後方カメラ13Bを例に取ると、図2に示したように、後方カメラ13Bが上部旋回体5の後方に対して角度θを持った斜め下方に対物レンズの光軸を向けている。このときに、油圧ショベル1の下部走行体4の接地面をLとし、この接地面Lに対して角度θを持ったカメラ画像を得ることができる。この接地面Lを仮想平面とした仮想視点VFの光軸が垂直方向(水平面と直交する方向)になるように座標変換した画像が仮想視点画像として生成される。つまり、仮想視点VFから接地面Lを見下ろした仮想的な画像が仮想視点画像となる。
【0036】
これにより、角度θを持った斜め上方からのカメラ画像が仮想視点画像(或いは俯瞰画像)に変換されて、モニタ14に表示される。また、左右の両側カメラ13R、13Lも後方カメラ13Bと同様に、接地面Lに対する光軸の傾斜角はθとする。後方カメラ13Bは上部旋回体5の後方に向いているのに対して、左右のカメラ13R、13Lは側方に向いている。つまり、仮想平面としての接地面Lに対する後方カメラ13Bの方向と左右両側のカメラ13L、13Rとでは概ね90度異なっている。つまり、各カメラ13B、13R、13Lは撮影する方向がそれぞれ90度異なるようにしている。
【0037】
なお、ここでは、カメラ13B、13R、13Lが撮影する視野の方向は90度異なるようにしているが、90度ではなくても、視野の方向が異なれば任意の角度とすることができる。また、各カメラ13B、13R、13Lは上部旋回体5の任意の位置に設置することができる。
【0038】
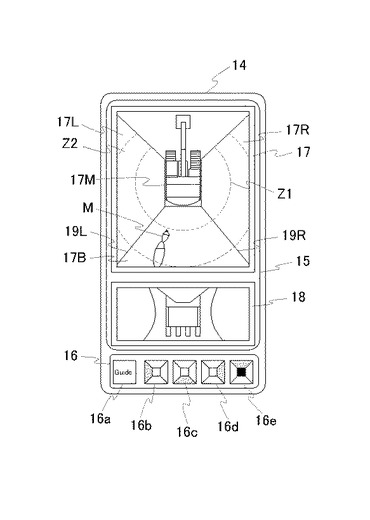
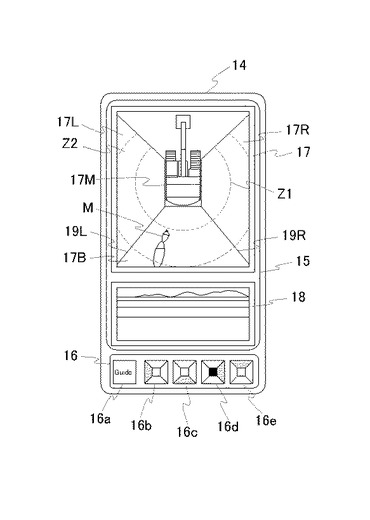
図3はモニタ14の構成を示している。この図に示すように、モニタ14は画像が表示される表示部15とスイッチを設けた入力部16とを有して構成している。表示部15は仮想視点画像表示領域17とカメラスルー画像表示領域18とを有している。仮想視点画像表示領域17は仮想視点画像を表示する領域である。仮想視点画像は第1の画像であり、油圧ショベルの平面図を図形化した作業機画像17Mを中央の位置に表示している。作業機画像17Mの周囲の領域には、カメラ13B、13R、13Lで取得したカメラ画像に基づいて視点変換した仮想視点画像が表示される。
【0039】
仮想視点画像は、後方カメラ13Bが撮影したカメラ画像に基づく仮想視点画像である仮想視点後方画像17Bと、右方カメラ13Rで撮影したカメラ画像に基づく仮想視点画像である仮想視点右方画像17Rと、左方カメラ13Lで撮影したカメラ画像に基づく仮想視点画像である仮想視点左方画像17Lとを有している。そして、仮想視点後方画像17Bと仮想視点右方画像17Rとの間には境界部としての境界ライン19R、仮想視点後方画像17Bと仮想視点右方画像17Rとの間には境界部としての境界ライン19Lが形成されている。
【0040】
一方、カメラスルー画像表示領域18にはカメラスルー画像が表示される。カメラスルー画像は第2の画像であり、後方カメラ13Bと右方カメラ13Rと左方カメラ13Lとのうち何れか1つのカメラが撮影している画像を仮想視点に変換することなく表示される。従って、カメラスルー画像表示領域18に表示されているカメラスルー画像はカメラが撮影している画像そのものになる。
【0041】
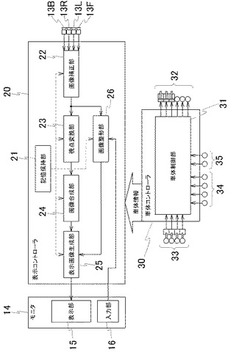
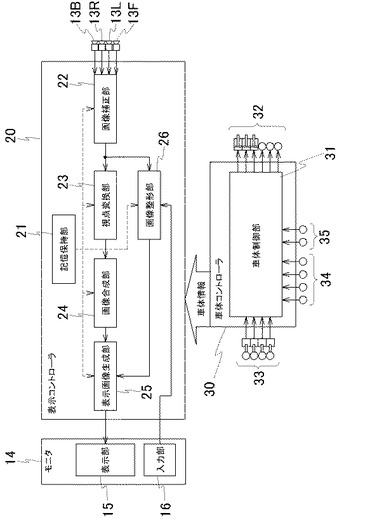
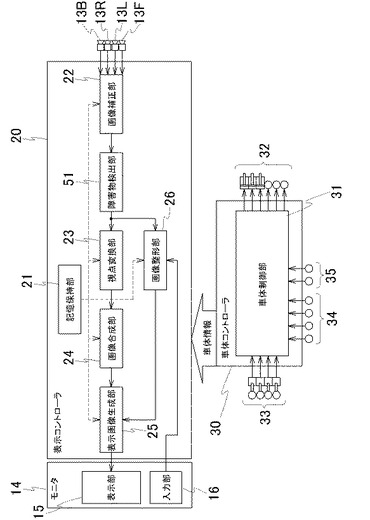
従って、モニタ14には仮想視点画像とカメラスルー画像とが表示される。モニタ14に表示制御を行うための表示コントローラ20を図4に示す。この図に示すように、表示コントローラ20は記憶保持部21と画像補正部22と視点変換部23と画像合成部24と表示画像生成部25と画像整形部26とを有して構成している。表示コントローラ20は車体制御部31を備えた車体コントローラ30と接続されており、車体コントローラ30から車体情報を取得する。
【0042】
記憶保持部21は、カメラ13B、13R、13Lの撮影画角やレンズ歪み等のカメラ光学系パラメータ、搭載位置・姿勢情報、後述する仮想視点画像に変換する際の仮想視点情報、表示画像用の作業機画像17Mや縮尺値等の各種情報を記憶している。
【0043】
画像補正部22は各カメラ13B、13R、13L、13Fと接続されており、各カメラ13B、13R、13L、13Fから取り込んだカメラ画像に対して、記憶保持部21に記憶されているカメラ光学系パラメータ等に基づいて、収差補正やコントラスト補正、色調補正等の画像補正を行う。これにより、取り込んだカメラ画像の画質を向上させている。画像補正部22が補正処理したカメラ画像は視点変換部23と画像整形部26とに出力される。
【0044】
視点変換部23は、画像補正部22が補正処理した各カメラ画像に基づいて、これらのカメラ画像を上方視点となるように視点変換を行う。なお、視点変換を行うのは、後方カメラ13B、右方カメラ13R、左方カメラ13Lが取得したカメラ画像であり、バケット監視カメラ13Fが取得したカメラ画像は視点変換の処理を行わない。この視点変換処理により、後方および左右の両側方における仮想視点後方画像17B、仮想視点右方画像17R、仮想視点左方画像17Lが生成される。
【0045】
モニタ14の仮想視点画像表示領域17には、これら3方向の仮想視点後方画像17B、仮想視点右方画像17R、仮想視点左方画像17Lのための表示領域が割り当てられ、これらの画像はそれぞれに割り当てられた表示領域に表示する。つまり、作業機画像17Mを中心として後側の領域に仮想視点後方画像17Bを割り当て、左側の領域に仮想視点左方画像17Lを割り当て、右側の領域に仮想視点右方画像17Rを割り当てる。
【0046】
仮想視点後方画像17B、仮想視点右方画像17R、仮想視点左方画像17Lの割り当ては、画像合成部24が行う。つまり、画像合成部24は視点変換部23により視点変換処理が行われた仮想視点後方画像17B、仮想視点右方画像17R、仮想視点左方画像17Lをそれぞれの領域に割り当てて合成する。これにより、仮想視点画像が生成される。また、前述したように、仮想視点後方画像17Bと仮想視点右方画像17Rとの境界部を示す境界ライン19R、仮想視点後方画像17Bと仮想視点左方画像17Lとの境界部を示す境界ライン19Lを画像上に形成する。
【0047】
図3に示すように、仮想視点画像表示領域17に表示される仮想視点後方画像17Bと仮想視点右方画像17Rと仮想視点左方画像17Lとを統合表示した仮想視点画像には危険ゾーンZ1と注意ゾーンZ2とを形成している。危険ゾーンZ1は油圧ショベル1との衝突を回避すべき対象である障害物(動的または固定的)と接触するおそれのある円形の領域を示している。この危険ゾーンZ1は標準的な旋回姿勢でのフロント作業機3のアーム11の先端旋回範囲に基づいて決定される。
【0048】
また、注意ゾーンZ2は危険ゾーンZ1の外側に形成される円形の領域との間のリング状の領域であり、オペレータに注意を喚起するために設けた領域である。注意ゾーンZ2の外側の円形の領域は危険ゾーンZ1の円形のほぼ倍の半径を持つ領域として決定される。ここでは、仮想視点画像表示領域17の表示範囲は危険ゾーンZ1の範囲とほぼ等しくしているが、危険ゾーンZ1よりもさらに余裕を持たせた範囲を表示してもよい。
【0049】
図4に示すように、画像補正部22が補正処理したカメラ画像は画像整形部26に出力される。画像整形部26には4枚の補正処理されたカメラ画像(後方カメラ13B、左方カメラ13L、右方カメラ13Rおよびバケット監視カメラ13Fのカメラ画像)が入力されており、4枚のカメラ画像のうち何れか1枚のカメラ画像が選択される。この選択作業は、モニタ14に設けた入力部16により行われる。
【0050】
すなわち、図3に示すように、入力部16は4つのスイッチ16a、17B、16c、16d、16eを有して構成されており、このうちスイッチ16aは後述するパターンを選択するためのスイッチになる。また、スイッチ17Bは左方カメラ13Lのカメラ画像を選択するためのスイッチであり、スイッチ16cは後方カメラ13Bのカメラ画像を選択するためのスイッチであり、スイッチ16dは右方カメラ13Rのカメラ画像を選択するためのスイッチであり、スイッチ16eはバケット監視カメラ13Fのカメラ画像を選択するためのスイッチである。
【0051】
これらのスイッチ17B〜16eの入力を受けて、画像整形部26は各カメラ画像のうち何れか1枚のカメラ画像を選択する。画像整形部26は選択したカメラ画像に対して後述する仮想視点範囲と消失範囲との何れか一方または両方を重畳表示する画像処理を行う。仮想視点範囲と消失範囲とは選択されたカメラ画像に対してガイドシンボルとして重畳表示される。このガイドシンボルのパターンはスイッチ16aにより選択される。画像整形部26が処理したカメラ画像はカメラスルー画像として表示画像生成部25に出力される。
【0052】
図4に示すように、表示画像生成部25には画像合成部24が合成処理した仮想視点画像および画像整形部26が処理したカメラスルー画像との2つの画像が入力される。表示画像生成部25は、画像合成部24が3枚の画像(仮想視点後方画像17B、仮想視点右方画像17R、仮想視点左方画像17L)を合成した仮想視点画像の中心に作業機画像17Mを配置して仮想視点画像を作成する。この仮想視点画像を表示部15の仮想視点画像表示領域17に表示する。
【0053】
且つ、画像整形部26から入力したカメラスルー画像をカメラスルー画像表示領域18に表示する。これにより、モニタ14の表示部15(表示画面)の上部と下部とに仮想視点画像とカメラスルー画像とが同時に表示される。これら仮想視点画像とカメラスルー画像とを有する画像を表示画像としてモニタ14の表示部15に出力する。表示部15はこの表示画像を表示するように制御する。
【0054】
また、図4に示すように、表示コントローラ20は車体コントローラ30に接続されており、車体コントローラ30の車体制御部31から各種車体情報を入力している。油圧ショベル1にはブーム10、アーム11およびバケット12の各油圧シリンダ10a、11a、12aが設けられており、下部走行体4を構成する左右の走行手段を駆動するための油圧モータと上部旋回体5を旋回駆動する旋回モータとが設けられている。これら油圧シリンダ、油圧モータおよび旋回モータは油圧アクチュエータとして総称されるものであり、図4ではこれらを油圧アクチュエータ群32として示している。
【0055】
また、運転室6の内部には複数の操作レバーを有する操作レバー群33が設けられており、オペレータが操作レバー群33を構成する何れかの操作レバーを操作すると、その上方が車体制御部31に取り込まれて、車体制御部31からの指令により油圧アクチュエータ群32を構成する各油圧アクチュエータが駆動される。なお、操作レバー群33からの知れは電気信号で直接的に油圧アクチュエータ群32に伝達する構成を採用することもできるが、指令は油圧信号となし、車体制御部31には操作レバーの操作量に関する信号のみが取り込まれるように構成してもよい。
【0056】
さらに、車体制御部31にはブーム10、アーム11およびバケット12の相対角度および上部旋回体5の下部走行体4に対する旋回角度を検出する角度検出器34a、34b、34c、34dが角度検出器群34として設けられている。角度検出器34aはブーム10の回動角度を、角度検出器34bはアーム11の回動角度を、角度検出器34cはバケット12の回動角度を、角度検出器34dは下部走行体4に対する上部旋回体5の旋回角度を検出している。また、速度検出器35a、35が速度検出器群35として設けられており、下部走行体4の左右の走行モータ5a、5bの回転速度を検出している。
【0057】
車体制御部31はこれら油圧アクチュエータ群32、操作レバー群33、角度検出器群34、速度検出器群35から各種情報を取得しており、これらは車体情報として表示コントローラ20に出力される。表示コントローラ20は車体情報に基づいて、作業機の姿勢情報や速度情報、操作情報といった各種情報を認識する。
【0058】
以上が構成である。次に、動作について説明する。運転室6に搭乗するオペレータは、図3に示すモニタ14の入力部16のスイッチ16a〜16eのうち何れかのスイッチを押下する。前述したように、スイッチ17B〜16eは、各カメラ13L、13B、13R、13Fが撮影しているカメラ画像のうち何れか1つをカメラスルー画像表示領域18に表示するために設けている。このために、スイッチ17B〜16eは、カメラ13L、13B、13R、13Fとの対応関係を視覚的に明示している。
【0059】
ここでは、スイッチ17B〜16eは自身が選択されていることを点灯により示す中心の領域が設けられており、この領域を中心として上下左右方向に4つの領域に分割している。そして、各領域の方向はカメラ13L、13B、13R、13Fが撮影している画像を選択していることを示している。スイッチ17Bは左側の領域が強調されており、これにより左方カメラ13Lが撮影しているカメラ画像が選択されていることを示している。スイッチ16cは下側の領域が強調されており、これにより後方カメラ13Bが撮影しているカメラ画像が選択されていることを示している。スイッチ16dは右側の領域が強調されており、これにより右方カメラ13Rが撮影しているカメラ画像が選択されていることを示している。スイッチ16eは上側の領域が強調されており、これによりバケット監視カメラ13Fが撮影しているカメラ画像が選択されていることを示している。
【0060】
前述したように、スイッチ17B〜16eの中央は点灯可能になっており、オペレータにより何れのスイッチ17B〜16eが選択されたかを、点灯することにより明示している。なお、スイッチ17B〜16eが対応するカメラ画像を明示する方法は、前述したものに限らず、スイッチ17B〜16eとカメラ13B、13L、13R、13Fが撮影している画像との関連性が分かるものであれば、任意の表示態様を採用することができる。
【0061】
図3の例では、オペレータはスイッチ16eを押下している。よって、バケット監視カメラ13Fが選択されていることが明示され、且つスイッチ16eが選択されていることが中央部分を点灯することにより認識される。このスイッチ16eが選択されたことは画像整形部26に出力される。
【0062】
表示コントローラの画像補正部22では、各カメラ13B、13R、13L、13Fが撮影しているカメラ画像をデータとして入力しており、このカメラ画像に対して補正処理を行う。補正処理されたカメラ13B、13R、13Fのカメラ画像に対して、視点変換部23が視点変換処理を行って、仮想視点後方画像17B、仮想視点右方画像17R、仮想視点左方画像17Lを生成する。そして、画像合成部24はこれら仮想視点後方画像17B、仮想視点右方画像17R、仮想視点左方画像17Lを合成処理して、統合された仮想視点画像を生成する。この統合処理された仮想視点画像に対して表示画像生成部25は中央に作業機画像17Mを追加する。
【0063】
一方、画像整形部26は画像補正部22が補正処理したカメラ画像のうち、スイッチ16eにより特定されるバケット監視カメラ13Fのカメラ画像を選択して、このカメラ画像を表示画像生成部25に出力する。なお、後述するように、画像整形部26はカメラ画像に対して仮想視点範囲と消失範囲との何れか一方または両方をガイドシンボルとして重畳表示することが可能になっているが、バケット監視カメラ13Fのカメラ画像が選択されているときには、当該重畳表示の処理は行わない。
【0064】
表示画像生成部25は、画像合成部24が統合して作業機画像17Mを追加した仮想視点画像および画像整形部26が処理したカメラ画像を入力する。そして、仮想視点画像が仮想視点画像表示領域17に表示される。つまり、作業機画像17Mを中心として仮想視点左方画像17Lと仮想視点後方画像17Bと仮想視点右方画像17Rとを合成した仮想視点画像が仮想視点画像表示領域17に表示される。
【0065】
一方、カメラスルー画像表示領域18にはバケット監視カメラ13Fが撮影しているカメラスルー画像が表示される。このカメラスルー画像は仮想視点変換を行っていない、バケット監視カメラ13Fが撮影している画像になる。表示画像生成部25は仮想視点画像およびカメラスルー画像を表示画像として表示部15に出力する。表示部15はこの表示画像を表示することで、図3に示すような画像が画面上に表示される。
【0066】
このとき、入力部16を構成する各スイッチ16a〜16eのうち、スイッチ16eが選択されていることが視覚的に明示される。そして、このスイッチ16eはバケット監視カメラ13Fの画像を選択していることを示しており、これによりオペレータは直感的にカメラスルー画像表示領域18に表示されているカメラスルー画像はバケット監視カメラ13Fが撮影している画像であることを認識することができる。
【0067】
次に、オペレータがスイッチ16dを押下したときには、このスイッチ16dに対応するカメラスルー画像、すなわち右方カメラ13Rが撮影しているカメラ画像がカメラスルー画像表示領域18に表示されることが認識される。スイッチ16dが押下されたときのモニタ14を図5に示す。図6は、オペレータがスイッチ16cを押下したときのモニタ14を示している。この場合は、スイッチ16cに対応するカメラスルー画像、すなわち後方カメラ13Bが撮影しているカメラ画像がカメラスルー画像表示領域18に表示される。また、図7は、オペレータがスイッチ17Bを押下したときにモニタ14を示している。この場合は、スイッチ17Bに対応するカメラスルー画像、すなわち左方カメラ13Lが撮影しているカメラ画像がカメラスルー画像表示領域18に表示される。
【0068】
図5乃至図7の仮想視点画像および図6のカメラスルー画像には、固定的或いは動的な障害物として、作業員Mを示している。ここでは、オペレータは後方カメラ13Bを選択するスイッチ16cを押下しており、図6に示すように後方カメラ13Bのカメラスルー画像がカメラスルー画像表示領域18に表示されている。この図に示すように、油圧ショベル1の後方に作業員Mが立地しており、カメラスルー画像には作業員Mが映し出されている。
【0069】
仮想視点画像は後方カメラ13Bおよび左右のカメラ13R、13Lの視点を仮想的に上方に設置したときに水平面で展開した画像である。図6の場合は、作業員Mは後方カメラ13Bの中央寄りに立地しており、このため仮想視点後方画像17Bに作業員Mが水平面で展開された形で表示されている。
【0070】
この状態で、オペレータは操作レバー群33を操作して、下部走行体4に対して上部旋回体5を旋回させる。上部旋回体5を旋回させると、各カメラ13B、13R、13Lが撮影する視野が変化する。図8a)は最初の旋回していない状態(つまり、図6の状態)を示しているが、上部旋回体5を旋回することによって、カメラスルー画像および仮想視点画像が変化する。
【0071】
同図a)の状態から旋回して、同図b)の状態になり、さらに旋回すると同図c)の状態になる。これにより、カメラスルー画像では作業員Mの立地位置が中央寄りの位置から左端部に向けて移動する。仮想視点画像も旋回と共に変化する。図7a)の状態では、作業員Mは後方カメラ13Bの範囲内に完全に入っているため、仮想視点後方画像17Bにも作業員Mの像は表示されている。
【0072】
一方、旋回を行うと共に、作業員Mの像は境界ライン19Lに侵入し、仮想視点後方画像17Bから部分的に退出する。これにより、仮想視点画像からは作業員Mの像が部分的に消失することになる。仮想視点画像は視点を仮想的に上方に設置したときに水平面方向に展開した画像になる。そうすると、後方カメラ13Bと左方カメラ13Lとの視野範囲の境界部に作業員Mが位置すると、仮想視点画像としては、その上部が消失して映し出されなくなる。このために、図8b)の仮想視点画像に示されるように、境界ライン19Lに位置している作業員Mは殆ど見えなくなっている。
【0073】
図8c)は同図b)からさらに旋回した場合であり、仮想視点後方画像17Bから作業員Mの像は完全に退出しているが、仮想視点左方画像17Lに作業員Mの像の一部が出現している。ただし、この場合でも作業員Mの像は一部が境界ライン19Lに掛かっており、その一部は消失している。従って、作業員Mの位置によっては、その像の一部または全部が仮想視点画像から消失する。このため、モニタ14に仮想視点画像のみが表示されている場合には、作業員Mの位置によって、その像を仮想視点画像では認識できなくなる。
【0074】
なお、ここでは、上部旋回体5を旋回することによって、各カメラ13B、13R、13Fの視野に対して作業員Mが移動する場合を示したが、上部旋回体5を旋回させることなく、作業員Mが移動した場合でも同様に仮想視点画像から作業員Mの像が一部または全部が消失することがある。
【0075】
従って、仮想視点画像のみによっては、作業員Mを認識できない場合がある。そこで、モニタ14には仮想視点画像だけでなく、仮想視点変換を行っていない後方カメラ13Bが撮影しているカメラスルー画像を表示している。作業員Mが境界ライン19L、19Rに位置することで、仮想視点画像からは作業員Mの像が一部または全部が消失することがあるが、カメラスルー画像は仮想視点変換を行っていない生の画像になる。このカメラスルー画像には、後方カメラ13Bの視野の範囲内であれば、作業員Mが明確に映し出されている。よって、仮想視点画像では作業員Mの像を認識できなくても、カメラスルー画像で作業員Mを明確に認識できる。
【0076】
仮想視点画像表示領域17には仮想視点画像を表示する。これにより、油圧ショベル1の周囲を上部から見下ろした画像が得られるため、油圧ショベル1と障害物(固定部や作業員M等)との位置関係を明示的に認識することができる。このため、油圧ショベル1の周囲の状況を的確に把握することができるため、作業の安全性を良好に確保することができる。
【0077】
このときに、仮想視点画像では境界ライン19L、19Rに障害物が位置すると、その立体物の上部が仮想視点画像から消失して、認識できなくなるおそれがある。このために、仮想視点画像を生成するためのカメラ画像をそのままカメラスルー画像として仮想視点画像と同時に表示することで、障害物の消失が発生したとしても、カメラスルー画像で明確に障害物の存在を認識することができる。これにより、作業機の周囲の状況を正確且つ良好な視認性でオペレータに認識させることができ、作業の安全性および作業効率を向上させることができる。
【0078】
次に、モニタ14の入力部16を構成する各スイッチのうちスイッチ16aを押下した場合について説明する。スイッチ16aはカメラスルー画像に重畳表示する仮想視点範囲と消失範囲とを表示させるか否かを選択するためのスイッチである。オペレータはこのスイッチ16aを押下することにより、仮想視点範囲および消失範囲のガイドパターンの表示態様を選択する。スイッチ16aを押下すると、自身のスイッチが押下されたことを示すためにスイッチ16aは点灯する。そして、スイッチ16aを押下する毎にパターンの切り替えを行う。
【0079】
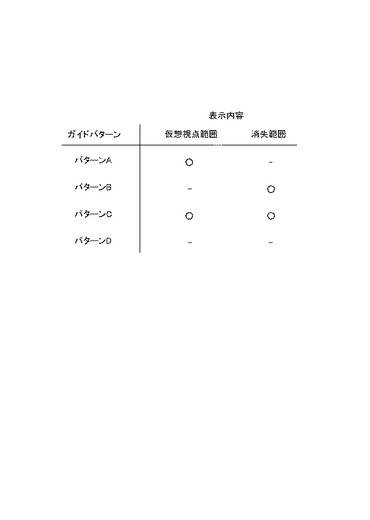
図9はガイドパターンと表示内容との関係を示している。スイッチ16aを1回押下する毎に、パターンA、パターンB、パターンC、パターンDと変化し、パターンDのときにスイッチ16aを押下すると、パターンAに戻る。なお、パターンDが選択されたときには、スイッチ16aを点灯させないようにしている。
【0080】
スイッチ16aの押下によりパターンAが選択されたときには仮想視点範囲のみがカメラスルー画像に重畳表示され、パターンBが選択されたときには消失範囲のみがカメラスルー画像に重畳表示され、パターンCが選択されたときには仮想視点範囲および消失範囲の両者がカメラスルー画像に重畳表示され、パターンDが選択されたときには仮想視点範囲と消失範囲との何れもがカメラスルー画像に重畳表示されない。
【0081】
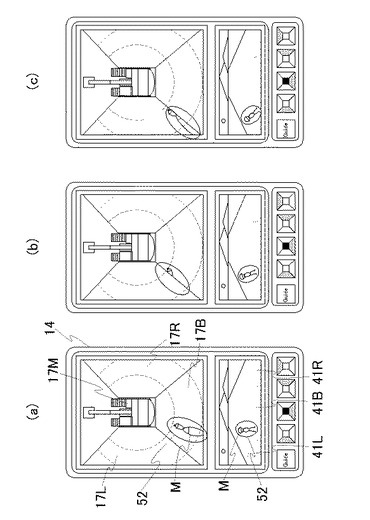
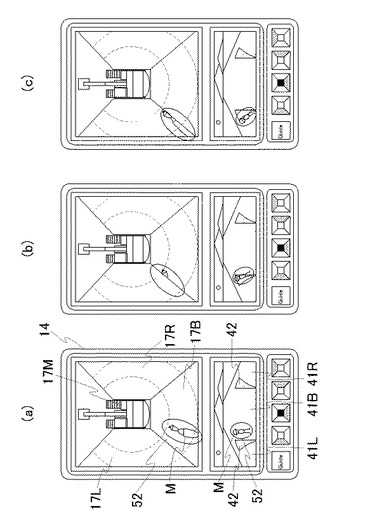
スイッチ16が1回押下されると、パターンAが選択される。つまり、仮想視点範囲のみがカメラスルー画像に重畳表示される。表示コントローラ20の画像整形部26は入力部16のスイッチ16aの押下により、パターンAが選択されたことを認識する。画像整形部26は、これにより画像補正部22から送られる後方カメラ13Bの画像をカメラスルー画像として、このカメラスルー画像に仮想視点範囲を重畳表示する。
【0082】
図10に示すように、仮想視点範囲41は、カメラスルー画像の表示内容のうち、仮想視点左方画像17L、仮想視点後方画像17B、仮想視点右方画像17Rの範囲を示している。仮想視点画像は視点を上方に仮想的に設置したときにおける水平面に展開した画像であり、カメラスルー画像の表示系に変換すると、仮想視点左方画像17L、仮想視点後方画像17B、仮想視点右方画像17Rが後方カメラ13Bのカメラスルー画像に映し出される。そこで、カメラスルー画像における仮想視点範囲41は、仮想視点左方画像17Lの範囲(仮想視点左方範囲41L)と仮想視点後方画像17Bの範囲(仮想視点後方範囲41B)と仮想視点右方画像17R(仮想視点右方範囲41R)とを有している
【0083】
図10はカメラスルー画像に後方カメラ13Bが撮影しているカメラ画像を示しており、このカメラスルー画像の中央に仮想視点後方範囲41Bが形成されており、その左右の仮想視点左方範囲41Lおよび仮想視点右方範囲41Rの一部が形成されている。このカメラスルー画像と各仮想視点範囲41とは一定の関係にあり、予め得ることができる。
【0084】
そこで、画像整形部26は、カメラスルー画像に仮想視点後方範囲41B、仮想視点右方範囲41R、仮想視点左方範囲41Lをガイドパターンとして表示する。図10では破線で示した領域がガイドパターンになる。これにより、オペレータはガイドパターンを視認することにより、カメラスルー画像における仮想視点後方範囲41B、仮想視点右方範囲41R、仮想視点左方範囲41Lを視覚的に認識することができる。
【0085】
このとき、作業員Mが仮想視点画像間の境界ライン19L、19Rに位置すると、仮想視点画像からは立体物の上部が消失し、仮想視点画像から作業員Mが部分的或いは全部が消失することがある。このときに、ガイドパターンの境界、つまり仮想視点後方範囲41Bと仮想視点右方範囲41Rとの間、或いは仮想視点後方範囲41Bと仮想視点左方範囲41Lとの間の境界に作業員Mが位置していることが、カメラスルー画像を視認することにより把握することができる。図10a)では作業員Mはカメラスルー画像の仮想視点後方範囲41Bに入っていることがガイドパターンを視認することにより、認識できる。
【0086】
一方、上部旋回体5を旋回させることにより、図10b)に示すように、作業員Mは仮想視点後方範囲41Bから退出しつつある。オペレータはカメラスルー画像の仮想視点後方範囲41Bを示すガイドパターンを視認することにより、作業員Mの消失の可能性を視覚的に認識することができる。つまり、仮想視点画像では作業員Mの像は殆ど消失しているが、カメラスルー画像に基づいて、作業員Mが境界ライン19Lに位置していることから、部分的に作業員Mの像が消失していることがオペレータに認識される。
【0087】
図10c)では、作業員Mが仮想視点後方範囲41Bから完全に外れているが、仮想視点左方範囲41Lには一部が出現していることをカメラスルー画像のガイドパターンを視認することにより、認識することができる。従って、仮想視点後方画像17Bと仮想視点左方画像17Lとの境界ライン19Lに作業員Mが位置しており、仮想視点画像から作業員Mが消失するおそれがあることをオペレータに認識させることができる。
【0088】
次に、スイッチ16aを押下したときに、パターンBに移行する。パターンBでは消失範囲のみが表示される。消失範囲42は、仮想視点画像間の領域のうち立体物の上部が消失する可能性のある範囲であり、図11では消失範囲42に作業員Mが位置したときには、仮想視点画像から作業員Mの像の一部が消失する。消失範囲42は仮想視点範囲41と同じく、カメラスルー画像の中で決まった範囲になり、画像整形部26はカメラスルー画像に消失範囲42を重畳表示する。
【0089】
図11a)に示すように、カメラスルー画像において、作業員Mが消失範囲42に位置していない場合には、仮想視点画像にも作業員Mが消失することなく表示されている。一方、上部旋回体5を旋回することにより、カメラスルー画像における作業員Mの位置が変化して、作業員Mはカメラスルー画像の中央寄りの位置から左端部に向けて移動する。このとき、仮想視点画像では作業員Mの像は境界ライン19Lに位置している。これにより、図11b)に示すように、仮想視点画像では作業員Mの殆どが消失している。
【0090】
この状態からさらに上部旋回体5を旋回すると、カメラスルー画像はさらに左端部に移動する。このとき、仮想視点後方画像17Bからは作業員Mは完全に消失しているが、仮想視点左方画像17Lに作業員Mが出現している。カメラスルー画像においては、作業員Mが消失範囲42に位置しており、仮想視点左方画像17Lに作業員Mの像が部分的に表示されている。従って、カメラスルー画像に消失範囲42を重畳表示することで、仮想視点画像から障害物(作業員M)が消失する可能性があることを、オペレータは視覚的に認識することができる。
【0091】
図10に示した仮想視点範囲41のガイドパターンと図11に示した消失範囲42のガイドパターンとは表示態様を変化させている。図10および図11では、仮想視点範囲41のガイドパターンを破線で示し、消失範囲42のガイドパターンを破線の中に網掛けで示している。仮想視点範囲41は障害物が仮想視点画像の中に入っているか否かを示しており、消失範囲42は障害物が消失する可能性がある範囲を示している。従って、両者の範囲は異なるものであり、これらを区別するために表示態様を変化している。勿論、ガイドパターンの表示態様を変化させる手法は、図10および図11の態様に限らず、任意の手法を用いることができる。
【0092】
次に、オペレータがスイッチ16aを押下すると、パターンCに移行する。パターンCでは仮想視点範囲41と消失範囲42との両者をカメラスルー画像に重畳表示している。画像整形部26は仮想視点範囲41と消失範囲42との両者をカメラスルー画像に重畳表示する。消失範囲42は仮想視点左方範囲41Lと仮想視点後方範囲41Bとの間の領域であり、また仮想視点後方範囲41Bと仮想視点右方範囲41Rとの間の領域である。よって、仮想視点範囲41と消失範囲42とにより連続的な領域が形成される。
【0093】
前述した場合と同様に、ここでも仮想視点範囲41と消失範囲42とでガイドパターンの表示態様を変化させている。これにより、カメラスルー画像において、仮想視点範囲41と消失範囲42とのそれぞれの領域を視覚的に区別して表示することができる。仮想視点範囲41と消失範囲42とを異なるガイドパターンで表示することで、仮想視点画像の範囲および障害物が消失する範囲を視覚的に認識できる。
【0094】
仮想視点範囲41と消失範囲42との両者を表示することで、仮想視点範囲41の障害物が消失しない範囲と消失範囲42の障害物が消失する可能性のある範囲とを視覚的にオペレータに認識させることができる。これにより、オペレータは多くの情報を得ることができ、より正確に油圧ショベル1の周囲の状況を認識することができる。
【0095】
次に、オペレータがスイッチ16aを押下すると、パターンDに移行する。このとき、スイッチ16aは点灯しなくなる。パターンDは仮想視点範囲41と消失範囲42との両者をカメラスルー画像に表示しないモードになる。従って、パターンDの場合は、画像整形部26はガイドパターンを重畳表示することなく、そのままのカメラ画像を表示画像生成部25に出力する。従って、この場合は、仮想視点範囲41と消失範囲42との両者がカメラスルー画像に表示されないため、ガイドパターンによる作業員Mの消失の可能性は明示的には表示されない。
【0096】
ただし、熟練度(習熟度)の高いオペレータであれば、仮想視点画像およびカメラスルー画像に基づいて、作業員Mの消失の可能性があるかを判断できる。この場合には、カメラスルー画像にガイドパターンを表示することは、熟練度の高いオペレータにとっては却って視認性を低下させる要因となる。このために、パターンDを選択することにより、ガイドパターンを表示させずに、後方カメラ13Bのカメラ画像そのものを表示させる。
【0097】
一方、熟練度の低いオペレータは、パターンA、B或いはCを選択することで、カメラスルー画像に仮想視点範囲41、消失範囲42といったガイドパターンを表示することで、油圧ショベル1の周囲の状況を正確且つ良好な視認性で認識できるようになる。従って、熟練度に応じて、表示させる態様(パターン)を選択可能に構成することで、オペレータの技量或いは志向に応じた表示態様を選択することができる。
【0098】
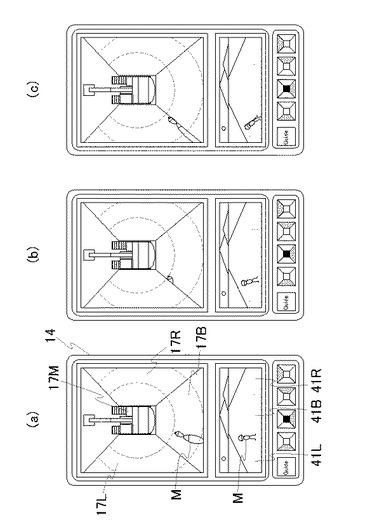
次に、変形例について説明する。本変形例の表示コントローラ20を図13に示す。本変形例の表示コントローラ20は、図4で示した表示コントローラ20に障害物検出部51を追加している。その他の構成は図4の表示コントローラ20と同じである。障害物検出部51は画像補正部22の後段に設けており、障害物検出部51で障害検出処理を行ったカメラ画像が視点変換部23および画像整形部26に出力される。
【0099】
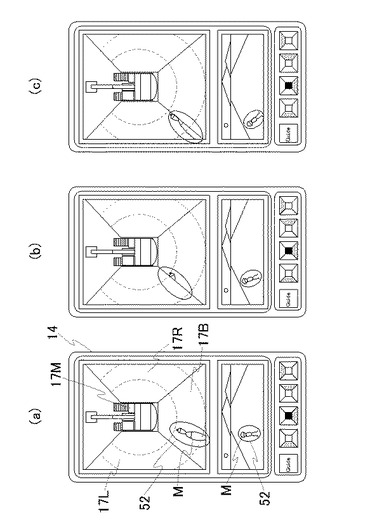
障害物検出部51は画像補正部22が補正処理したカメラ画像から障害物(作業員や車両等)といった特徴点を検出して、検出した障害物の周囲にマーク52を重畳表示する。図14はパターンDにおける仮想視点画像およびカメラスルー画像に表示されている作業員Mに楕円形のマーク52を重畳表示している。マーク52は障害物の周囲に形成されるものであれば、楕円形ではなく、円形或いは四角形であってもよい。
【0100】
図14a)に示すように、仮想視点画像およびカメラスルー画像の作業員Mの周囲に楕円形のマーク52を重畳表示している。この状態から、上部旋回体5が旋回すると、図14b)に示すように、仮想視点画像では作業員Mの像が境界ライン19Lに位置し、カメラスルー画像では作業員Mが画面中央から端部に移動する。このとき、仮想視点画像では作業員Mの像の殆どが消失しているため、作業員Mの像自体は認識することが困難になっている。しかし、作業員Mの像の周囲にはマーク52が表示されており、作業員Mの像が見えなくなったとしても、マーク52は表示されているため、このマーク52に基づいて作業員Mの存在をオペレータは認識することができる。また、カメラスルー画像にも作業員Mの周囲にマーク52を形成しており、オペレータは作業員Mの存在を認識することができる。
【0101】
図14c)の場合も同様であり、仮想視点後方画像17Bからは作業員Mの像は完全に退出しており、仮想視点左方画像17Lの一部に作業員Mの像が出現している。従って、仮想視点左方画像17Lには作業員Mの像が部分的に表示されており、作業員Mの像自体ではその存在を認識することは困難である。このとき、マーク52を表示していることで、作業員Mの存在をオペレータが容易に認識することができる。また、カメラスルー画像にも作業員Mの周囲にマーク52を形成していることから、オペレータはその存在を認識することができる。
【0102】
また、図15のパターンAのときの仮想視点画像およびカメラスルー画像、そして図16のパターンBのときの仮想視点画像およびカメラスルー画像、さらに図17のパターンCのときの仮想視点画像およびカメラスルー画像に、作業員Mの周囲にマーク52を形成することで、オペレータはその存在を容易に認識することができる。且つ、マーク52と仮想視点範囲41、消失範囲42とに基づいて、作業員Mが消失する可能性を容易に認識することができる。これにより、オペレータは油圧ショベル1の周囲の状況を明確に認識することができ、作業の安全性確保および作業の安全性の向上を図ることができる。
【符号の説明】
【0103】
1 油圧ショベル
3 フロント作業機
4 下部走行体
5 上部旋回体
6 運転室
10 ブーム
11 アーム
12 バケット
13B 後方カメラ
13L 左方カメラ
13R 右方カメラ
13F バケット監視カメラ
14 モニタ
15 表示部
16 入力部
17B 仮想視点後方画像
17L 仮想視点左方画像
17R 仮想視点右方画像
16a〜16e スイッチ
17 仮想視点画像表示領域
18 カメラスルー画像表示領域
19L、19R 境界ライン
20 表示コントローラ
21 記憶保持部
22 画像補正部
23 視点変換部
24 画像合成部
25 表示画像生成部
26 画像整形部
41 仮想視点範囲
41B 仮想視点後方範囲
41L 仮想視点左方範囲
41R 仮想視点右方範囲
42 消失範囲
51 障害物検出部
52 マーク
【技術分野】
【0001】
本発明は、作業機の安全確保等のために設けられ、作業機の周囲の状況を監視する作業機の周囲監視装置に関するものである。
【背景技術】
【0002】
作業機の一例としての油圧ショベルは、自走式の作業機であって、クローラ式またはホイール式の走行手段を有する下部走行体を備えている。下部走行体には旋回装置を介して上部旋回体が設置されている。上部旋回体には土砂の掘削等の作業を行うための作業手段が設けられている。この作業手段は、上部旋回体に俯抑動作可能に連結したブームと、このブームの先端に上下方向に回動可能に連結したアームとを備えており、土砂の掘削等の作業を行うバケットがアタッチメントとして、アームの先端にリンク機構を介して連結されている。これらにより、多関節作業機構を構成している。
【0003】
油圧ショベル等の自走式作業機において、作業の安全を確保して、作業機の操作性の向上を図るために、旋回体の周囲の状況を監視する周囲監視装置を設けたものが従来から用いられている。この周囲監視装置は、カメラを上部旋回体に装着すると共に、運転室において、オペレータ(運転者)が着座する運転室の前方位置にモニタを設置することにより構成している。このモニタにはカメラが撮影した画像が動画状態の映像として表示される。
【0004】
ところで、カメラは上部旋回体に固定的に保持されており、その視野範囲は限定されている。作業対象となる前方位置の視野が必要なのは当然のことであるが、上部旋回体の後方および左右の両側方の視野を得るために、上部旋回体には複数のカメラ装着する構成としている。これにより、上部旋回体のほぼ全周に渡る視野を確保することができ、作業の安全確保および作業機の操作性の向上を図っている。
【0005】
この種の作業機の周囲監視装置が特許文献1に開示されている。この特許文献1の技術では、油圧ショベルの右側方、左側方、後方を撮影する各カメラを設ける構成としており、各カメラの画像に対して、カメラの視点を上方に仮想的に移動したときの仮想視点画像(俯瞰画像)を表示するようにしている。この仮想視点画像を表示することにより、動的或いは固定的な障害物と作業機までの距離を正確に把握することができる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−248613号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1で示されるように、作業機の上方に仮想視点をおいた仮想視点画像を生成して表示することで、障害物と作業機までの距離を一見して正確に把握することができる。これにより、作業機の周囲の状況をオペレータが認識できるようになり、作業の安全性を向上させる点で極めて高い効果を奏する。特許文献1では、複数のカメラの仮想視点画像を合成してパノラマ画像を構成し、現在のパノラマ画像と過去のパノラマ画像とを重ね合わせることにより、表示用のパノラマ画像を生成している。
【0008】
ところで、パノラマ画像は複数の仮想視点画像を合成して生成されるものであるが、各仮想視点画像の元となる画像は異なる視野を撮影しているカメラになる。つまり、作業機の車体の左右側方および後方を視野とするそれぞれのカメラが撮影した画像を上方に仮想視点をおいて水平面に展開した画像が仮想視点画像になる。このとき、後方の仮想視点画像と側方の仮想視点画像との間の境界部は、後方のカメラと側方のカメラとで視野範囲が部分的に重複している。これにより、仮想視点画像で表示されない領域をなくすようにしている。
【0009】
しかし、仮想視点画像は、斜め上方から撮影しているカメラの視点を上方に仮想的に設置した場合に水平面方向に展開した画像であり、仮想視点画像間の境界部に立体物が存在する場合、その立体物の上部(地面より高い部分)が仮想視点画像から消失する可能性がある。この場合には、仮想視点画像を合成して表示したパノラマ画像において、境界部に位置している立体物の上部が表示されないことになる。従って、実際には作業機の近傍に固定的或いは動的な障害物が存在するにもかかわらず、仮想視点画像から障害物が消失し、オペレータは障害物の存在を認識することができなくなる。これにより、作業機の周囲の状況を的確に監視することができなくなる。
【0010】
また、仮想視点画像間の境界部に障害物が存在している場合、立体物の全部ではなく一部が仮想視点画像に表示されなくなることもある。この場合には、仮想視点画像から障害物の一部が消失するが、一部は仮想視点画像に出現している状態になる。ただし、仮想視点画像には障害物の一部のみが表示されており、オペレータは仮想視点画像を注意して視認していなければ、やはり障害物の存在を見落としてしまうことがある。これにより、オペレータが直感的に障害物の存在を把握できないことから、作業機の周囲の状況を十分に監視することができなくなる。
【0011】
そこで、本発明は、作業機の周囲の状況を正確且つ良好な視認性で監視して、作業機の安全性や作業効率を向上させることを目的とする。
【課題を解決するための手段】
【0012】
以上の課題を解決するため、本発明の作業機の周囲監視装置は、走行体に対して旋回可能な旋回体にフロント作業機を設けた作業機の周囲を監視するための作業機の周囲監視装置であって、前記旋回体に複数台が設けられ、そのうち2台が相互に視野範囲を部分的に重複するように設けた複数台のカメラと、前記各カメラで取得したカメラ画像に基づいて上方視点となるように視点変換した仮想視点画像を生成する視点変換部と、前記視点変換部が生成した複数の前記仮想視点画像をそれぞれに対応した表示領域に表示するように合成した合成画像を生成する画像合成部と、前記合成画像を第1の画像として、前記各カメラのうち何れか1つのカメラが撮影している画像であり前記仮想視点画像間の境界線を視野内に含む画像を第2の画像として、前記第1の画像と前記第2の画像との両者を含む表示画像を生成する表示画像生成部と、前記表示画像生成部が生成した前記表示画像を画面上に表示するモニタと、を備えていることを特徴とする。
【0013】
この作業機の周囲監視装置によれば、第1の画像と第2の画像との両者をモニタに表示することで、仮想視点画像の境界部に障害物が存在していることにより仮想視点画像から障害物の一部または全部が消失したとしても、障害物の存在を第2の画像で明確に認識することができる。これにより、オペレータに作業機の周囲の状況を正確且つ良好な視認性で認識させることができ、安全性や作業効率を向上させることができる。
【0014】
また、前記表示画像生成部は、前記第2の画像の中での前記各仮想視点画像の表示範囲を示す仮想表示範囲を前記第2の画像に対して重畳表示をすることを特徴とする。
【0015】
第2の画像の表示系で、各仮想視点画像の範囲を仮想表示範囲として重畳表示することで、この仮想表示範囲と障害物との関係で、障害物の消失の可能性をオペレータは明確に認識することができる。これにより、作業機の周囲の状況をより正確且つ良好な視認性で認識でき、安全性や作業効率を向上させることができる。
【0016】
また、前記表示画像生成部は、前記第2の画像の中での隣接する前記仮想視点画像間の領域のうち立体物の上部が消失する可能性のある範囲を示す消失範囲を前記第2の画像に対して重畳表示することを特徴とする。
【0017】
第2の画像の表示系で、隣接する仮想視点画像間の領域のうち立体物が消失する可能性のある範囲を示す消失範囲として重畳表示することで、消失範囲内に障害物が存在しているか否かにより、障害物の消失の可能性をオペレータは明確に認識できる。これにより、作業機の周囲の状況をより正確且つ良好な視認性で認識でき、安全性や作業効率を向上させることができる。
【0018】
また、前記表示画像生成部は、前記第2の画像の中での前記仮想表示範囲および隣接する前記仮想視点画像間の領域のうち立体物の上部が消失する可能性のある範囲を示す消失範囲を前記第2の画像に対して重畳表示し、前記仮想表示範囲と前記消失範囲とを異なる表示形式で表示させることを特徴とする。
【0019】
第2の画像に仮想表示範囲と消失範囲との両者を表示することで、仮想範囲および消失範囲と障害物との関係をさらに明確にオペレータは認識することができる。これにより、作業機の周囲の状況を正確且つ良好な視認性で認識でき、安全性や作業効率を向上させることができる。
【0020】
また、前記表示画像生成部は、前記第2の画像の中での前記仮想表示範囲と隣接する前記仮想視点画像間の領域のうち立体物の上部が消失する可能性のある範囲を示す消失範囲との何れか一方または両方を前記第2の画像に対して重畳表示することを可能にして、前記仮想表示範囲と前記消失範囲との両者を重畳表示するときにはこれらを異なる表示形式で表示し、前記仮想表示範囲と前記消失範囲との何れか一方を表示するモードと両者を表示するモードと何れも表示しないモードとを切り替え可能に構成したことを特徴とする。
【0021】
熟練度の低いオペレータであれば、仮想表示範囲と消失範囲との何れか一方または両方を第2の画像に重畳表示することで、障害物の消失の可能性をオペレータに認識させるアシストを行なうことができる。一方、熟練度の高いオペレータであれば、仮想表示範囲と消失範囲とを表示しなくても障害物の消失の可能性を認識することができ、却って第2の画像の視認性を低下させる。このため、オペレータの熟練度によって最適な表示態様を選択することができる。
【0022】
また、前記カメラが取得した前記カメラ画像に基づいて障害物を検出する障害物検出部を備え、前記表示画像生成部は、前記障害物検出部が検出した前記障害物の周囲に形成するマークを前記第1の画像と前記第2の画像との何れか一方または両方に重畳表示することを特徴とする。
【0023】
障害物を示すマークを第1の画像、第2の画像に重畳表示することで、仮想視点画像から障害物が部分的に消失しても、マークは表示されているため、このマークに基づいてオペレータは障害物を認識することができる。これにより、オペレータは障害物を確実に認識することができ、作業機の周囲の状況を認識することができる。
【発明の効果】
【0024】
本発明は、カメラが撮影した仮想視点画像だけでなく、この仮想視点画像を生成するための元となるカメラが撮影した画像をモニタに表示することで、仮想視点画像間の境界に立体物が存在することによって立体物の上部が消失したとしても、カメラの画像からオペレータは障害物を認識することができる。これにより、作業機の周囲の状況を正確且つ良好な視認性でオペレータに認識させることができ、作業の安全性および作業効率を向上させることができる。
【図面の簡単な説明】
【0025】
【図1】作業機の一例としての油圧ショベルを示す外観図である。
【図2】油圧ショベルの正面図である。
【図3】バケット監視カメラの画像が選択されているときのモニタの一例を示す図である。
【図4】表示コントローラおよびこれに接続される各部のブロック図である。
【図5】右方カメラの画像が選択されているときのモニタの一例を示す図である。
【図6】後方カメラの画像が選択されているときのモニタの一例を示す図である。
【図7】左方カメラの画像が選択されているときのモニタの一例を示す図である。
【図8】上部旋回体を旋回したときのモニタの画面例を示す図である。
【図9】各パターンにおけるカメラスルー画像に重畳表示される内容を示す図である。
【図10】パターンAにおけるモニタの画面例を示す図である。
【図11】パターンBにおけるモニタの画面例を示す図である。
【図12】パターンCにおけるモニタの画面例を示す図である。
【図13】変形例における表示コントローラおよびこれに接続される各部のブロック図である。
【図14】変形例におけるパターンDのモニタの画面例を示す図である。
【図15】変形例におけるパターンAのモニタの画面例を示す図である。
【図16】変形例におけるパターンBのモニタの画面例を示す図である。
【図17】変形例におけるパターンCのモニタの画面例を示す図である。
【発明を実施するための形態】
【0026】
以下、図面を参照して、本発明の実施形態について説明する。以下において、作業機としてクローラ走行手段を有する油圧ショベルを適用した例を説明するが、例えばホイールローダ等の油圧ショベル以外の作業機を適用することもできる。また、油圧ショベルはクローラ式の走行手段ではなく、ホイール式の走行手段を有しているものであってもよい。
【0027】
図1に示すように、油圧ショベル1は車体2とフロント作業機3とを有して構成している。車体2は下部走行体4と上部旋回体5とを有しており、下部走行体4と上部旋回体5との間には旋回装置が設けられている。上部旋回体5にはオペレータが搭乗して油圧ショベル1を操作するための運転室6が設置されており、また土砂の掘削等の作業を行うフロント作業機3が運転室6の右手において、ほぼ並ぶような位置に上部旋回体5に設けられている。上部旋回体5には、運転室6およびフロント作業機3の後方位置に建屋7等が設けられており、最後端部にはカウンタウェイト8が設置されている。
【0028】
フロント作業機3はブーム10とアーム11とバケット12とを有して構成される土砂の掘削作業手段である。ブーム10は、その基端部が上部旋回体5のフレームに連結ピンにより軸支されて俯抑動作可能となっている。ブーム10の先端にはアーム11が上下方向に回動可能に連結されており、ブーム10の先端にはバケット12が回動可能に連結されている。ブーム10の俯抑動作は油圧シリンダ10aを駆動することにより行われる。また、アーム11は油圧シリンダ11aにより、バケット12は油圧シリンダ12aにより駆動される。
【0029】
オペレータは、運転室6で前方を向いた状態で操作を行うものであり、上部旋回体5の前方には十分広い視野が確保されている。また、運転室6の左側における斜め前方の視野も確保されている。ただし、左側であっても、斜め後方については、オペレータは振り返るようにしなければ直接視認することができない。また、運転室6の右側においては、フロント作業機3が設置されており、視野のかなり部分がブーム10により妨げられ、実質的に肉眼による視認を行うことができない。
【0030】
さらに、上部旋回体5の後方については、建屋7およびカウンタウェイト8が位置しており、オペレータは運転室6の内部で振り返るようにしなければ視野を得ることができない。且つ、建屋7およびカウンタウェイト8の上面は高い位置となっており、オペレータは運転室6の内部で振り返る姿勢を取ったとしても、視野が得られるのは遠い位置であり、上部旋回体5に近い位置を視認することができない。
【0031】
そこで、上部旋回体5の後方、左側方および右側方の監視を可能にするために、監視用のカメラ13B(後方カメラ13B)、カメラ13R(右方カメラ13R)、カメラ13L(左方カメラ13L)の3台のカメラを、補助的に視野を確保するために設けている。すなわち、カウンタウェイト8の上面において、左右のほぼ中間位置に後方カメラ13Bを設置し、建屋7の左方向の上面には左方カメラ13Lを、上部旋回体5の右側の建屋7またはタンクの上面に右方カメラ13Rを設置している。
【0032】
後方カメラ13Bは上部旋回体5の後方の広い範囲の画像を取得し、この後方カメラ13Bと左方カメラ13Lと右方カメラ13Rとによって、上部旋回体5の運転室6の内部で、オペレータが無理のない姿勢で得られる前方視野を除くほぼ全周に渡る視野が得られることになる。また、アーム11の下部にはバケット12を視野とするカメラ13F(バケット監視カメラ13F)が設けられている。
【0033】
各カメラ13B、13R、13Lのレンズの視野角とそれらの配設位置とによって、少なくとも各レンズの視野範囲の一部がオーバラップするように設定されている。具体的には、後方カメラ13Bの視野角の左右の両側部分が左右のカメラ13R、13Lの視野角とが部分的に重複するようにしている。これにより、上部旋回体5の周囲において、ブラインドとなる箇所がなくなる。
【0034】
そして、運転室6の内部にはモニタ14が設置されており、各カメラ13B、13R、13Lから取得した画像がモニタ14に動画状態にして表示される。モニタ14には、各カメラ13B、13R、13Lで取得したカメラ画像がそのままの画像(カメラスルー画像)として表示され、且つ上方視点となるように視点変換された画像(仮想視点画像)としても表示される。カメラスルー画像と仮想視点画像とは1つの画面で両者が同時に表示される。
【0035】
ここで、後方カメラ13Bを例に取ると、図2に示したように、後方カメラ13Bが上部旋回体5の後方に対して角度θを持った斜め下方に対物レンズの光軸を向けている。このときに、油圧ショベル1の下部走行体4の接地面をLとし、この接地面Lに対して角度θを持ったカメラ画像を得ることができる。この接地面Lを仮想平面とした仮想視点VFの光軸が垂直方向(水平面と直交する方向)になるように座標変換した画像が仮想視点画像として生成される。つまり、仮想視点VFから接地面Lを見下ろした仮想的な画像が仮想視点画像となる。
【0036】
これにより、角度θを持った斜め上方からのカメラ画像が仮想視点画像(或いは俯瞰画像)に変換されて、モニタ14に表示される。また、左右の両側カメラ13R、13Lも後方カメラ13Bと同様に、接地面Lに対する光軸の傾斜角はθとする。後方カメラ13Bは上部旋回体5の後方に向いているのに対して、左右のカメラ13R、13Lは側方に向いている。つまり、仮想平面としての接地面Lに対する後方カメラ13Bの方向と左右両側のカメラ13L、13Rとでは概ね90度異なっている。つまり、各カメラ13B、13R、13Lは撮影する方向がそれぞれ90度異なるようにしている。
【0037】
なお、ここでは、カメラ13B、13R、13Lが撮影する視野の方向は90度異なるようにしているが、90度ではなくても、視野の方向が異なれば任意の角度とすることができる。また、各カメラ13B、13R、13Lは上部旋回体5の任意の位置に設置することができる。
【0038】
図3はモニタ14の構成を示している。この図に示すように、モニタ14は画像が表示される表示部15とスイッチを設けた入力部16とを有して構成している。表示部15は仮想視点画像表示領域17とカメラスルー画像表示領域18とを有している。仮想視点画像表示領域17は仮想視点画像を表示する領域である。仮想視点画像は第1の画像であり、油圧ショベルの平面図を図形化した作業機画像17Mを中央の位置に表示している。作業機画像17Mの周囲の領域には、カメラ13B、13R、13Lで取得したカメラ画像に基づいて視点変換した仮想視点画像が表示される。
【0039】
仮想視点画像は、後方カメラ13Bが撮影したカメラ画像に基づく仮想視点画像である仮想視点後方画像17Bと、右方カメラ13Rで撮影したカメラ画像に基づく仮想視点画像である仮想視点右方画像17Rと、左方カメラ13Lで撮影したカメラ画像に基づく仮想視点画像である仮想視点左方画像17Lとを有している。そして、仮想視点後方画像17Bと仮想視点右方画像17Rとの間には境界部としての境界ライン19R、仮想視点後方画像17Bと仮想視点右方画像17Rとの間には境界部としての境界ライン19Lが形成されている。
【0040】
一方、カメラスルー画像表示領域18にはカメラスルー画像が表示される。カメラスルー画像は第2の画像であり、後方カメラ13Bと右方カメラ13Rと左方カメラ13Lとのうち何れか1つのカメラが撮影している画像を仮想視点に変換することなく表示される。従って、カメラスルー画像表示領域18に表示されているカメラスルー画像はカメラが撮影している画像そのものになる。
【0041】
従って、モニタ14には仮想視点画像とカメラスルー画像とが表示される。モニタ14に表示制御を行うための表示コントローラ20を図4に示す。この図に示すように、表示コントローラ20は記憶保持部21と画像補正部22と視点変換部23と画像合成部24と表示画像生成部25と画像整形部26とを有して構成している。表示コントローラ20は車体制御部31を備えた車体コントローラ30と接続されており、車体コントローラ30から車体情報を取得する。
【0042】
記憶保持部21は、カメラ13B、13R、13Lの撮影画角やレンズ歪み等のカメラ光学系パラメータ、搭載位置・姿勢情報、後述する仮想視点画像に変換する際の仮想視点情報、表示画像用の作業機画像17Mや縮尺値等の各種情報を記憶している。
【0043】
画像補正部22は各カメラ13B、13R、13L、13Fと接続されており、各カメラ13B、13R、13L、13Fから取り込んだカメラ画像に対して、記憶保持部21に記憶されているカメラ光学系パラメータ等に基づいて、収差補正やコントラスト補正、色調補正等の画像補正を行う。これにより、取り込んだカメラ画像の画質を向上させている。画像補正部22が補正処理したカメラ画像は視点変換部23と画像整形部26とに出力される。
【0044】
視点変換部23は、画像補正部22が補正処理した各カメラ画像に基づいて、これらのカメラ画像を上方視点となるように視点変換を行う。なお、視点変換を行うのは、後方カメラ13B、右方カメラ13R、左方カメラ13Lが取得したカメラ画像であり、バケット監視カメラ13Fが取得したカメラ画像は視点変換の処理を行わない。この視点変換処理により、後方および左右の両側方における仮想視点後方画像17B、仮想視点右方画像17R、仮想視点左方画像17Lが生成される。
【0045】
モニタ14の仮想視点画像表示領域17には、これら3方向の仮想視点後方画像17B、仮想視点右方画像17R、仮想視点左方画像17Lのための表示領域が割り当てられ、これらの画像はそれぞれに割り当てられた表示領域に表示する。つまり、作業機画像17Mを中心として後側の領域に仮想視点後方画像17Bを割り当て、左側の領域に仮想視点左方画像17Lを割り当て、右側の領域に仮想視点右方画像17Rを割り当てる。
【0046】
仮想視点後方画像17B、仮想視点右方画像17R、仮想視点左方画像17Lの割り当ては、画像合成部24が行う。つまり、画像合成部24は視点変換部23により視点変換処理が行われた仮想視点後方画像17B、仮想視点右方画像17R、仮想視点左方画像17Lをそれぞれの領域に割り当てて合成する。これにより、仮想視点画像が生成される。また、前述したように、仮想視点後方画像17Bと仮想視点右方画像17Rとの境界部を示す境界ライン19R、仮想視点後方画像17Bと仮想視点左方画像17Lとの境界部を示す境界ライン19Lを画像上に形成する。
【0047】
図3に示すように、仮想視点画像表示領域17に表示される仮想視点後方画像17Bと仮想視点右方画像17Rと仮想視点左方画像17Lとを統合表示した仮想視点画像には危険ゾーンZ1と注意ゾーンZ2とを形成している。危険ゾーンZ1は油圧ショベル1との衝突を回避すべき対象である障害物(動的または固定的)と接触するおそれのある円形の領域を示している。この危険ゾーンZ1は標準的な旋回姿勢でのフロント作業機3のアーム11の先端旋回範囲に基づいて決定される。
【0048】
また、注意ゾーンZ2は危険ゾーンZ1の外側に形成される円形の領域との間のリング状の領域であり、オペレータに注意を喚起するために設けた領域である。注意ゾーンZ2の外側の円形の領域は危険ゾーンZ1の円形のほぼ倍の半径を持つ領域として決定される。ここでは、仮想視点画像表示領域17の表示範囲は危険ゾーンZ1の範囲とほぼ等しくしているが、危険ゾーンZ1よりもさらに余裕を持たせた範囲を表示してもよい。
【0049】
図4に示すように、画像補正部22が補正処理したカメラ画像は画像整形部26に出力される。画像整形部26には4枚の補正処理されたカメラ画像(後方カメラ13B、左方カメラ13L、右方カメラ13Rおよびバケット監視カメラ13Fのカメラ画像)が入力されており、4枚のカメラ画像のうち何れか1枚のカメラ画像が選択される。この選択作業は、モニタ14に設けた入力部16により行われる。
【0050】
すなわち、図3に示すように、入力部16は4つのスイッチ16a、17B、16c、16d、16eを有して構成されており、このうちスイッチ16aは後述するパターンを選択するためのスイッチになる。また、スイッチ17Bは左方カメラ13Lのカメラ画像を選択するためのスイッチであり、スイッチ16cは後方カメラ13Bのカメラ画像を選択するためのスイッチであり、スイッチ16dは右方カメラ13Rのカメラ画像を選択するためのスイッチであり、スイッチ16eはバケット監視カメラ13Fのカメラ画像を選択するためのスイッチである。
【0051】
これらのスイッチ17B〜16eの入力を受けて、画像整形部26は各カメラ画像のうち何れか1枚のカメラ画像を選択する。画像整形部26は選択したカメラ画像に対して後述する仮想視点範囲と消失範囲との何れか一方または両方を重畳表示する画像処理を行う。仮想視点範囲と消失範囲とは選択されたカメラ画像に対してガイドシンボルとして重畳表示される。このガイドシンボルのパターンはスイッチ16aにより選択される。画像整形部26が処理したカメラ画像はカメラスルー画像として表示画像生成部25に出力される。
【0052】
図4に示すように、表示画像生成部25には画像合成部24が合成処理した仮想視点画像および画像整形部26が処理したカメラスルー画像との2つの画像が入力される。表示画像生成部25は、画像合成部24が3枚の画像(仮想視点後方画像17B、仮想視点右方画像17R、仮想視点左方画像17L)を合成した仮想視点画像の中心に作業機画像17Mを配置して仮想視点画像を作成する。この仮想視点画像を表示部15の仮想視点画像表示領域17に表示する。
【0053】
且つ、画像整形部26から入力したカメラスルー画像をカメラスルー画像表示領域18に表示する。これにより、モニタ14の表示部15(表示画面)の上部と下部とに仮想視点画像とカメラスルー画像とが同時に表示される。これら仮想視点画像とカメラスルー画像とを有する画像を表示画像としてモニタ14の表示部15に出力する。表示部15はこの表示画像を表示するように制御する。
【0054】
また、図4に示すように、表示コントローラ20は車体コントローラ30に接続されており、車体コントローラ30の車体制御部31から各種車体情報を入力している。油圧ショベル1にはブーム10、アーム11およびバケット12の各油圧シリンダ10a、11a、12aが設けられており、下部走行体4を構成する左右の走行手段を駆動するための油圧モータと上部旋回体5を旋回駆動する旋回モータとが設けられている。これら油圧シリンダ、油圧モータおよび旋回モータは油圧アクチュエータとして総称されるものであり、図4ではこれらを油圧アクチュエータ群32として示している。
【0055】
また、運転室6の内部には複数の操作レバーを有する操作レバー群33が設けられており、オペレータが操作レバー群33を構成する何れかの操作レバーを操作すると、その上方が車体制御部31に取り込まれて、車体制御部31からの指令により油圧アクチュエータ群32を構成する各油圧アクチュエータが駆動される。なお、操作レバー群33からの知れは電気信号で直接的に油圧アクチュエータ群32に伝達する構成を採用することもできるが、指令は油圧信号となし、車体制御部31には操作レバーの操作量に関する信号のみが取り込まれるように構成してもよい。
【0056】
さらに、車体制御部31にはブーム10、アーム11およびバケット12の相対角度および上部旋回体5の下部走行体4に対する旋回角度を検出する角度検出器34a、34b、34c、34dが角度検出器群34として設けられている。角度検出器34aはブーム10の回動角度を、角度検出器34bはアーム11の回動角度を、角度検出器34cはバケット12の回動角度を、角度検出器34dは下部走行体4に対する上部旋回体5の旋回角度を検出している。また、速度検出器35a、35が速度検出器群35として設けられており、下部走行体4の左右の走行モータ5a、5bの回転速度を検出している。
【0057】
車体制御部31はこれら油圧アクチュエータ群32、操作レバー群33、角度検出器群34、速度検出器群35から各種情報を取得しており、これらは車体情報として表示コントローラ20に出力される。表示コントローラ20は車体情報に基づいて、作業機の姿勢情報や速度情報、操作情報といった各種情報を認識する。
【0058】
以上が構成である。次に、動作について説明する。運転室6に搭乗するオペレータは、図3に示すモニタ14の入力部16のスイッチ16a〜16eのうち何れかのスイッチを押下する。前述したように、スイッチ17B〜16eは、各カメラ13L、13B、13R、13Fが撮影しているカメラ画像のうち何れか1つをカメラスルー画像表示領域18に表示するために設けている。このために、スイッチ17B〜16eは、カメラ13L、13B、13R、13Fとの対応関係を視覚的に明示している。
【0059】
ここでは、スイッチ17B〜16eは自身が選択されていることを点灯により示す中心の領域が設けられており、この領域を中心として上下左右方向に4つの領域に分割している。そして、各領域の方向はカメラ13L、13B、13R、13Fが撮影している画像を選択していることを示している。スイッチ17Bは左側の領域が強調されており、これにより左方カメラ13Lが撮影しているカメラ画像が選択されていることを示している。スイッチ16cは下側の領域が強調されており、これにより後方カメラ13Bが撮影しているカメラ画像が選択されていることを示している。スイッチ16dは右側の領域が強調されており、これにより右方カメラ13Rが撮影しているカメラ画像が選択されていることを示している。スイッチ16eは上側の領域が強調されており、これによりバケット監視カメラ13Fが撮影しているカメラ画像が選択されていることを示している。
【0060】
前述したように、スイッチ17B〜16eの中央は点灯可能になっており、オペレータにより何れのスイッチ17B〜16eが選択されたかを、点灯することにより明示している。なお、スイッチ17B〜16eが対応するカメラ画像を明示する方法は、前述したものに限らず、スイッチ17B〜16eとカメラ13B、13L、13R、13Fが撮影している画像との関連性が分かるものであれば、任意の表示態様を採用することができる。
【0061】
図3の例では、オペレータはスイッチ16eを押下している。よって、バケット監視カメラ13Fが選択されていることが明示され、且つスイッチ16eが選択されていることが中央部分を点灯することにより認識される。このスイッチ16eが選択されたことは画像整形部26に出力される。
【0062】
表示コントローラの画像補正部22では、各カメラ13B、13R、13L、13Fが撮影しているカメラ画像をデータとして入力しており、このカメラ画像に対して補正処理を行う。補正処理されたカメラ13B、13R、13Fのカメラ画像に対して、視点変換部23が視点変換処理を行って、仮想視点後方画像17B、仮想視点右方画像17R、仮想視点左方画像17Lを生成する。そして、画像合成部24はこれら仮想視点後方画像17B、仮想視点右方画像17R、仮想視点左方画像17Lを合成処理して、統合された仮想視点画像を生成する。この統合処理された仮想視点画像に対して表示画像生成部25は中央に作業機画像17Mを追加する。
【0063】
一方、画像整形部26は画像補正部22が補正処理したカメラ画像のうち、スイッチ16eにより特定されるバケット監視カメラ13Fのカメラ画像を選択して、このカメラ画像を表示画像生成部25に出力する。なお、後述するように、画像整形部26はカメラ画像に対して仮想視点範囲と消失範囲との何れか一方または両方をガイドシンボルとして重畳表示することが可能になっているが、バケット監視カメラ13Fのカメラ画像が選択されているときには、当該重畳表示の処理は行わない。
【0064】
表示画像生成部25は、画像合成部24が統合して作業機画像17Mを追加した仮想視点画像および画像整形部26が処理したカメラ画像を入力する。そして、仮想視点画像が仮想視点画像表示領域17に表示される。つまり、作業機画像17Mを中心として仮想視点左方画像17Lと仮想視点後方画像17Bと仮想視点右方画像17Rとを合成した仮想視点画像が仮想視点画像表示領域17に表示される。
【0065】
一方、カメラスルー画像表示領域18にはバケット監視カメラ13Fが撮影しているカメラスルー画像が表示される。このカメラスルー画像は仮想視点変換を行っていない、バケット監視カメラ13Fが撮影している画像になる。表示画像生成部25は仮想視点画像およびカメラスルー画像を表示画像として表示部15に出力する。表示部15はこの表示画像を表示することで、図3に示すような画像が画面上に表示される。
【0066】
このとき、入力部16を構成する各スイッチ16a〜16eのうち、スイッチ16eが選択されていることが視覚的に明示される。そして、このスイッチ16eはバケット監視カメラ13Fの画像を選択していることを示しており、これによりオペレータは直感的にカメラスルー画像表示領域18に表示されているカメラスルー画像はバケット監視カメラ13Fが撮影している画像であることを認識することができる。
【0067】
次に、オペレータがスイッチ16dを押下したときには、このスイッチ16dに対応するカメラスルー画像、すなわち右方カメラ13Rが撮影しているカメラ画像がカメラスルー画像表示領域18に表示されることが認識される。スイッチ16dが押下されたときのモニタ14を図5に示す。図6は、オペレータがスイッチ16cを押下したときのモニタ14を示している。この場合は、スイッチ16cに対応するカメラスルー画像、すなわち後方カメラ13Bが撮影しているカメラ画像がカメラスルー画像表示領域18に表示される。また、図7は、オペレータがスイッチ17Bを押下したときにモニタ14を示している。この場合は、スイッチ17Bに対応するカメラスルー画像、すなわち左方カメラ13Lが撮影しているカメラ画像がカメラスルー画像表示領域18に表示される。
【0068】
図5乃至図7の仮想視点画像および図6のカメラスルー画像には、固定的或いは動的な障害物として、作業員Mを示している。ここでは、オペレータは後方カメラ13Bを選択するスイッチ16cを押下しており、図6に示すように後方カメラ13Bのカメラスルー画像がカメラスルー画像表示領域18に表示されている。この図に示すように、油圧ショベル1の後方に作業員Mが立地しており、カメラスルー画像には作業員Mが映し出されている。
【0069】
仮想視点画像は後方カメラ13Bおよび左右のカメラ13R、13Lの視点を仮想的に上方に設置したときに水平面で展開した画像である。図6の場合は、作業員Mは後方カメラ13Bの中央寄りに立地しており、このため仮想視点後方画像17Bに作業員Mが水平面で展開された形で表示されている。
【0070】
この状態で、オペレータは操作レバー群33を操作して、下部走行体4に対して上部旋回体5を旋回させる。上部旋回体5を旋回させると、各カメラ13B、13R、13Lが撮影する視野が変化する。図8a)は最初の旋回していない状態(つまり、図6の状態)を示しているが、上部旋回体5を旋回することによって、カメラスルー画像および仮想視点画像が変化する。
【0071】
同図a)の状態から旋回して、同図b)の状態になり、さらに旋回すると同図c)の状態になる。これにより、カメラスルー画像では作業員Mの立地位置が中央寄りの位置から左端部に向けて移動する。仮想視点画像も旋回と共に変化する。図7a)の状態では、作業員Mは後方カメラ13Bの範囲内に完全に入っているため、仮想視点後方画像17Bにも作業員Mの像は表示されている。
【0072】
一方、旋回を行うと共に、作業員Mの像は境界ライン19Lに侵入し、仮想視点後方画像17Bから部分的に退出する。これにより、仮想視点画像からは作業員Mの像が部分的に消失することになる。仮想視点画像は視点を仮想的に上方に設置したときに水平面方向に展開した画像になる。そうすると、後方カメラ13Bと左方カメラ13Lとの視野範囲の境界部に作業員Mが位置すると、仮想視点画像としては、その上部が消失して映し出されなくなる。このために、図8b)の仮想視点画像に示されるように、境界ライン19Lに位置している作業員Mは殆ど見えなくなっている。
【0073】
図8c)は同図b)からさらに旋回した場合であり、仮想視点後方画像17Bから作業員Mの像は完全に退出しているが、仮想視点左方画像17Lに作業員Mの像の一部が出現している。ただし、この場合でも作業員Mの像は一部が境界ライン19Lに掛かっており、その一部は消失している。従って、作業員Mの位置によっては、その像の一部または全部が仮想視点画像から消失する。このため、モニタ14に仮想視点画像のみが表示されている場合には、作業員Mの位置によって、その像を仮想視点画像では認識できなくなる。
【0074】
なお、ここでは、上部旋回体5を旋回することによって、各カメラ13B、13R、13Fの視野に対して作業員Mが移動する場合を示したが、上部旋回体5を旋回させることなく、作業員Mが移動した場合でも同様に仮想視点画像から作業員Mの像が一部または全部が消失することがある。
【0075】
従って、仮想視点画像のみによっては、作業員Mを認識できない場合がある。そこで、モニタ14には仮想視点画像だけでなく、仮想視点変換を行っていない後方カメラ13Bが撮影しているカメラスルー画像を表示している。作業員Mが境界ライン19L、19Rに位置することで、仮想視点画像からは作業員Mの像が一部または全部が消失することがあるが、カメラスルー画像は仮想視点変換を行っていない生の画像になる。このカメラスルー画像には、後方カメラ13Bの視野の範囲内であれば、作業員Mが明確に映し出されている。よって、仮想視点画像では作業員Mの像を認識できなくても、カメラスルー画像で作業員Mを明確に認識できる。
【0076】
仮想視点画像表示領域17には仮想視点画像を表示する。これにより、油圧ショベル1の周囲を上部から見下ろした画像が得られるため、油圧ショベル1と障害物(固定部や作業員M等)との位置関係を明示的に認識することができる。このため、油圧ショベル1の周囲の状況を的確に把握することができるため、作業の安全性を良好に確保することができる。
【0077】
このときに、仮想視点画像では境界ライン19L、19Rに障害物が位置すると、その立体物の上部が仮想視点画像から消失して、認識できなくなるおそれがある。このために、仮想視点画像を生成するためのカメラ画像をそのままカメラスルー画像として仮想視点画像と同時に表示することで、障害物の消失が発生したとしても、カメラスルー画像で明確に障害物の存在を認識することができる。これにより、作業機の周囲の状況を正確且つ良好な視認性でオペレータに認識させることができ、作業の安全性および作業効率を向上させることができる。
【0078】
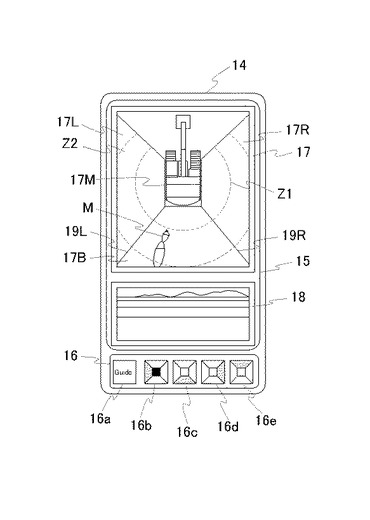
次に、モニタ14の入力部16を構成する各スイッチのうちスイッチ16aを押下した場合について説明する。スイッチ16aはカメラスルー画像に重畳表示する仮想視点範囲と消失範囲とを表示させるか否かを選択するためのスイッチである。オペレータはこのスイッチ16aを押下することにより、仮想視点範囲および消失範囲のガイドパターンの表示態様を選択する。スイッチ16aを押下すると、自身のスイッチが押下されたことを示すためにスイッチ16aは点灯する。そして、スイッチ16aを押下する毎にパターンの切り替えを行う。
【0079】
図9はガイドパターンと表示内容との関係を示している。スイッチ16aを1回押下する毎に、パターンA、パターンB、パターンC、パターンDと変化し、パターンDのときにスイッチ16aを押下すると、パターンAに戻る。なお、パターンDが選択されたときには、スイッチ16aを点灯させないようにしている。
【0080】
スイッチ16aの押下によりパターンAが選択されたときには仮想視点範囲のみがカメラスルー画像に重畳表示され、パターンBが選択されたときには消失範囲のみがカメラスルー画像に重畳表示され、パターンCが選択されたときには仮想視点範囲および消失範囲の両者がカメラスルー画像に重畳表示され、パターンDが選択されたときには仮想視点範囲と消失範囲との何れもがカメラスルー画像に重畳表示されない。
【0081】
スイッチ16が1回押下されると、パターンAが選択される。つまり、仮想視点範囲のみがカメラスルー画像に重畳表示される。表示コントローラ20の画像整形部26は入力部16のスイッチ16aの押下により、パターンAが選択されたことを認識する。画像整形部26は、これにより画像補正部22から送られる後方カメラ13Bの画像をカメラスルー画像として、このカメラスルー画像に仮想視点範囲を重畳表示する。
【0082】
図10に示すように、仮想視点範囲41は、カメラスルー画像の表示内容のうち、仮想視点左方画像17L、仮想視点後方画像17B、仮想視点右方画像17Rの範囲を示している。仮想視点画像は視点を上方に仮想的に設置したときにおける水平面に展開した画像であり、カメラスルー画像の表示系に変換すると、仮想視点左方画像17L、仮想視点後方画像17B、仮想視点右方画像17Rが後方カメラ13Bのカメラスルー画像に映し出される。そこで、カメラスルー画像における仮想視点範囲41は、仮想視点左方画像17Lの範囲(仮想視点左方範囲41L)と仮想視点後方画像17Bの範囲(仮想視点後方範囲41B)と仮想視点右方画像17R(仮想視点右方範囲41R)とを有している
【0083】
図10はカメラスルー画像に後方カメラ13Bが撮影しているカメラ画像を示しており、このカメラスルー画像の中央に仮想視点後方範囲41Bが形成されており、その左右の仮想視点左方範囲41Lおよび仮想視点右方範囲41Rの一部が形成されている。このカメラスルー画像と各仮想視点範囲41とは一定の関係にあり、予め得ることができる。
【0084】
そこで、画像整形部26は、カメラスルー画像に仮想視点後方範囲41B、仮想視点右方範囲41R、仮想視点左方範囲41Lをガイドパターンとして表示する。図10では破線で示した領域がガイドパターンになる。これにより、オペレータはガイドパターンを視認することにより、カメラスルー画像における仮想視点後方範囲41B、仮想視点右方範囲41R、仮想視点左方範囲41Lを視覚的に認識することができる。
【0085】
このとき、作業員Mが仮想視点画像間の境界ライン19L、19Rに位置すると、仮想視点画像からは立体物の上部が消失し、仮想視点画像から作業員Mが部分的或いは全部が消失することがある。このときに、ガイドパターンの境界、つまり仮想視点後方範囲41Bと仮想視点右方範囲41Rとの間、或いは仮想視点後方範囲41Bと仮想視点左方範囲41Lとの間の境界に作業員Mが位置していることが、カメラスルー画像を視認することにより把握することができる。図10a)では作業員Mはカメラスルー画像の仮想視点後方範囲41Bに入っていることがガイドパターンを視認することにより、認識できる。
【0086】
一方、上部旋回体5を旋回させることにより、図10b)に示すように、作業員Mは仮想視点後方範囲41Bから退出しつつある。オペレータはカメラスルー画像の仮想視点後方範囲41Bを示すガイドパターンを視認することにより、作業員Mの消失の可能性を視覚的に認識することができる。つまり、仮想視点画像では作業員Mの像は殆ど消失しているが、カメラスルー画像に基づいて、作業員Mが境界ライン19Lに位置していることから、部分的に作業員Mの像が消失していることがオペレータに認識される。
【0087】
図10c)では、作業員Mが仮想視点後方範囲41Bから完全に外れているが、仮想視点左方範囲41Lには一部が出現していることをカメラスルー画像のガイドパターンを視認することにより、認識することができる。従って、仮想視点後方画像17Bと仮想視点左方画像17Lとの境界ライン19Lに作業員Mが位置しており、仮想視点画像から作業員Mが消失するおそれがあることをオペレータに認識させることができる。
【0088】
次に、スイッチ16aを押下したときに、パターンBに移行する。パターンBでは消失範囲のみが表示される。消失範囲42は、仮想視点画像間の領域のうち立体物の上部が消失する可能性のある範囲であり、図11では消失範囲42に作業員Mが位置したときには、仮想視点画像から作業員Mの像の一部が消失する。消失範囲42は仮想視点範囲41と同じく、カメラスルー画像の中で決まった範囲になり、画像整形部26はカメラスルー画像に消失範囲42を重畳表示する。
【0089】
図11a)に示すように、カメラスルー画像において、作業員Mが消失範囲42に位置していない場合には、仮想視点画像にも作業員Mが消失することなく表示されている。一方、上部旋回体5を旋回することにより、カメラスルー画像における作業員Mの位置が変化して、作業員Mはカメラスルー画像の中央寄りの位置から左端部に向けて移動する。このとき、仮想視点画像では作業員Mの像は境界ライン19Lに位置している。これにより、図11b)に示すように、仮想視点画像では作業員Mの殆どが消失している。
【0090】
この状態からさらに上部旋回体5を旋回すると、カメラスルー画像はさらに左端部に移動する。このとき、仮想視点後方画像17Bからは作業員Mは完全に消失しているが、仮想視点左方画像17Lに作業員Mが出現している。カメラスルー画像においては、作業員Mが消失範囲42に位置しており、仮想視点左方画像17Lに作業員Mの像が部分的に表示されている。従って、カメラスルー画像に消失範囲42を重畳表示することで、仮想視点画像から障害物(作業員M)が消失する可能性があることを、オペレータは視覚的に認識することができる。
【0091】
図10に示した仮想視点範囲41のガイドパターンと図11に示した消失範囲42のガイドパターンとは表示態様を変化させている。図10および図11では、仮想視点範囲41のガイドパターンを破線で示し、消失範囲42のガイドパターンを破線の中に網掛けで示している。仮想視点範囲41は障害物が仮想視点画像の中に入っているか否かを示しており、消失範囲42は障害物が消失する可能性がある範囲を示している。従って、両者の範囲は異なるものであり、これらを区別するために表示態様を変化している。勿論、ガイドパターンの表示態様を変化させる手法は、図10および図11の態様に限らず、任意の手法を用いることができる。
【0092】
次に、オペレータがスイッチ16aを押下すると、パターンCに移行する。パターンCでは仮想視点範囲41と消失範囲42との両者をカメラスルー画像に重畳表示している。画像整形部26は仮想視点範囲41と消失範囲42との両者をカメラスルー画像に重畳表示する。消失範囲42は仮想視点左方範囲41Lと仮想視点後方範囲41Bとの間の領域であり、また仮想視点後方範囲41Bと仮想視点右方範囲41Rとの間の領域である。よって、仮想視点範囲41と消失範囲42とにより連続的な領域が形成される。
【0093】
前述した場合と同様に、ここでも仮想視点範囲41と消失範囲42とでガイドパターンの表示態様を変化させている。これにより、カメラスルー画像において、仮想視点範囲41と消失範囲42とのそれぞれの領域を視覚的に区別して表示することができる。仮想視点範囲41と消失範囲42とを異なるガイドパターンで表示することで、仮想視点画像の範囲および障害物が消失する範囲を視覚的に認識できる。
【0094】
仮想視点範囲41と消失範囲42との両者を表示することで、仮想視点範囲41の障害物が消失しない範囲と消失範囲42の障害物が消失する可能性のある範囲とを視覚的にオペレータに認識させることができる。これにより、オペレータは多くの情報を得ることができ、より正確に油圧ショベル1の周囲の状況を認識することができる。
【0095】
次に、オペレータがスイッチ16aを押下すると、パターンDに移行する。このとき、スイッチ16aは点灯しなくなる。パターンDは仮想視点範囲41と消失範囲42との両者をカメラスルー画像に表示しないモードになる。従って、パターンDの場合は、画像整形部26はガイドパターンを重畳表示することなく、そのままのカメラ画像を表示画像生成部25に出力する。従って、この場合は、仮想視点範囲41と消失範囲42との両者がカメラスルー画像に表示されないため、ガイドパターンによる作業員Mの消失の可能性は明示的には表示されない。
【0096】
ただし、熟練度(習熟度)の高いオペレータであれば、仮想視点画像およびカメラスルー画像に基づいて、作業員Mの消失の可能性があるかを判断できる。この場合には、カメラスルー画像にガイドパターンを表示することは、熟練度の高いオペレータにとっては却って視認性を低下させる要因となる。このために、パターンDを選択することにより、ガイドパターンを表示させずに、後方カメラ13Bのカメラ画像そのものを表示させる。
【0097】
一方、熟練度の低いオペレータは、パターンA、B或いはCを選択することで、カメラスルー画像に仮想視点範囲41、消失範囲42といったガイドパターンを表示することで、油圧ショベル1の周囲の状況を正確且つ良好な視認性で認識できるようになる。従って、熟練度に応じて、表示させる態様(パターン)を選択可能に構成することで、オペレータの技量或いは志向に応じた表示態様を選択することができる。
【0098】
次に、変形例について説明する。本変形例の表示コントローラ20を図13に示す。本変形例の表示コントローラ20は、図4で示した表示コントローラ20に障害物検出部51を追加している。その他の構成は図4の表示コントローラ20と同じである。障害物検出部51は画像補正部22の後段に設けており、障害物検出部51で障害検出処理を行ったカメラ画像が視点変換部23および画像整形部26に出力される。
【0099】
障害物検出部51は画像補正部22が補正処理したカメラ画像から障害物(作業員や車両等)といった特徴点を検出して、検出した障害物の周囲にマーク52を重畳表示する。図14はパターンDにおける仮想視点画像およびカメラスルー画像に表示されている作業員Mに楕円形のマーク52を重畳表示している。マーク52は障害物の周囲に形成されるものであれば、楕円形ではなく、円形或いは四角形であってもよい。
【0100】
図14a)に示すように、仮想視点画像およびカメラスルー画像の作業員Mの周囲に楕円形のマーク52を重畳表示している。この状態から、上部旋回体5が旋回すると、図14b)に示すように、仮想視点画像では作業員Mの像が境界ライン19Lに位置し、カメラスルー画像では作業員Mが画面中央から端部に移動する。このとき、仮想視点画像では作業員Mの像の殆どが消失しているため、作業員Mの像自体は認識することが困難になっている。しかし、作業員Mの像の周囲にはマーク52が表示されており、作業員Mの像が見えなくなったとしても、マーク52は表示されているため、このマーク52に基づいて作業員Mの存在をオペレータは認識することができる。また、カメラスルー画像にも作業員Mの周囲にマーク52を形成しており、オペレータは作業員Mの存在を認識することができる。
【0101】
図14c)の場合も同様であり、仮想視点後方画像17Bからは作業員Mの像は完全に退出しており、仮想視点左方画像17Lの一部に作業員Mの像が出現している。従って、仮想視点左方画像17Lには作業員Mの像が部分的に表示されており、作業員Mの像自体ではその存在を認識することは困難である。このとき、マーク52を表示していることで、作業員Mの存在をオペレータが容易に認識することができる。また、カメラスルー画像にも作業員Mの周囲にマーク52を形成していることから、オペレータはその存在を認識することができる。
【0102】
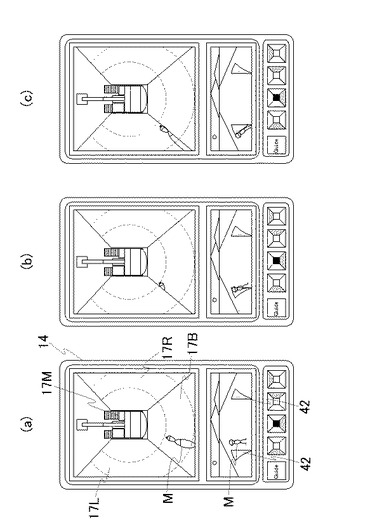
また、図15のパターンAのときの仮想視点画像およびカメラスルー画像、そして図16のパターンBのときの仮想視点画像およびカメラスルー画像、さらに図17のパターンCのときの仮想視点画像およびカメラスルー画像に、作業員Mの周囲にマーク52を形成することで、オペレータはその存在を容易に認識することができる。且つ、マーク52と仮想視点範囲41、消失範囲42とに基づいて、作業員Mが消失する可能性を容易に認識することができる。これにより、オペレータは油圧ショベル1の周囲の状況を明確に認識することができ、作業の安全性確保および作業の安全性の向上を図ることができる。
【符号の説明】
【0103】
1 油圧ショベル
3 フロント作業機
4 下部走行体
5 上部旋回体
6 運転室
10 ブーム
11 アーム
12 バケット
13B 後方カメラ
13L 左方カメラ
13R 右方カメラ
13F バケット監視カメラ
14 モニタ
15 表示部
16 入力部
17B 仮想視点後方画像
17L 仮想視点左方画像
17R 仮想視点右方画像
16a〜16e スイッチ
17 仮想視点画像表示領域
18 カメラスルー画像表示領域
19L、19R 境界ライン
20 表示コントローラ
21 記憶保持部
22 画像補正部
23 視点変換部
24 画像合成部
25 表示画像生成部
26 画像整形部
41 仮想視点範囲
41B 仮想視点後方範囲
41L 仮想視点左方範囲
41R 仮想視点右方範囲
42 消失範囲
51 障害物検出部
52 マーク
【特許請求の範囲】
【請求項1】
走行体に対して旋回可能な旋回体にフロント作業機を設けた作業機の周囲を監視するための作業機の周囲監視装置であって、
前記旋回体に複数台が設けられ、そのうち2台が相互に視野範囲を部分的に重複するように設けた複数台のカメラと、
前記各カメラで取得したカメラ画像に基づいて上方視点となるように視点変換した仮想視点画像を生成する視点変換部と、
前記視点変換部が生成した複数の前記仮想視点画像をそれぞれに対応した表示領域に表示するように合成した合成画像を生成する画像合成部と、
前記合成画像を第1の画像として、前記各カメラのうち何れか1つのカメラが撮影している画像であり前記仮想視点画像間の境界線を視野内に含む画像を第2の画像として、前記第1の画像と前記第2の画像との両者を含む表示画像を生成する表示画像生成部と、
前記表示画像生成部が生成した前記表示画像を画面上に表示するモニタと、
を備えていることを特徴とする作業機の周囲監視装置。
【請求項2】
前記表示画像生成部は、前記第2の画像の中での前記各仮想視点画像の表示範囲を示す仮想表示範囲を前記第2の画像に対して重畳表示をすること
を特徴とする請求項1記載の作業機の周囲監視装置。
【請求項3】
前記表示画像生成部は、前記第2の画像の中での隣接する前記仮想視点画像間の領域のうち立体物の上部が消失する可能性のある範囲を示す消失範囲を前記第2の画像に対して重畳表示すること
を特徴とする請求項1記載の作業機の周囲監視装置。
【請求項4】
前記表示画像生成部は、前記第2の画像の中での前記仮想表示範囲および隣接する前記仮想視点画像間の領域のうち立体物の上部が消失する可能性のある範囲を示す消失範囲を前記第2の画像に対して重畳表示し、前記仮想表示範囲と前記消失範囲とを異なる表示形式で表示させること
を特徴とする請求項2記載の作業機の周囲監視装置。
【請求項5】
前記表示画像生成部は、前記第2の画像の中での前記仮想表示範囲と隣接する前記仮想視点画像間の領域のうち立体物の上部が消失する可能性のある範囲を示す消失範囲との何れか一方または両方を前記第2の画像に対して重畳表示することを可能にして、前記仮想表示範囲と前記消失範囲との両者を重畳表示するときにはこれらを異なる表示形式で表示し、
前記仮想表示範囲と前記消失範囲との何れか一方を表示するモードと両者を表示するモードと何れも表示しないモードとを切り替え可能に構成したこと
を特徴とする請求項2記載の作業機の周囲監視装置。
【請求項6】
前記カメラが取得した前記カメラ画像に基づいて障害物を検出する障害物検出部を備え、
前記表示画像生成部は、前記障害物検出部が検出した前記障害物の周囲に形成するマークを前記第1の画像と前記第2の画像との何れか一方または両方に重畳表示すること
を特徴とする請求項1乃至5の何れか1項に記載の作業機の周囲監視装置。
【請求項1】
走行体に対して旋回可能な旋回体にフロント作業機を設けた作業機の周囲を監視するための作業機の周囲監視装置であって、
前記旋回体に複数台が設けられ、そのうち2台が相互に視野範囲を部分的に重複するように設けた複数台のカメラと、
前記各カメラで取得したカメラ画像に基づいて上方視点となるように視点変換した仮想視点画像を生成する視点変換部と、
前記視点変換部が生成した複数の前記仮想視点画像をそれぞれに対応した表示領域に表示するように合成した合成画像を生成する画像合成部と、
前記合成画像を第1の画像として、前記各カメラのうち何れか1つのカメラが撮影している画像であり前記仮想視点画像間の境界線を視野内に含む画像を第2の画像として、前記第1の画像と前記第2の画像との両者を含む表示画像を生成する表示画像生成部と、
前記表示画像生成部が生成した前記表示画像を画面上に表示するモニタと、
を備えていることを特徴とする作業機の周囲監視装置。
【請求項2】
前記表示画像生成部は、前記第2の画像の中での前記各仮想視点画像の表示範囲を示す仮想表示範囲を前記第2の画像に対して重畳表示をすること
を特徴とする請求項1記載の作業機の周囲監視装置。
【請求項3】
前記表示画像生成部は、前記第2の画像の中での隣接する前記仮想視点画像間の領域のうち立体物の上部が消失する可能性のある範囲を示す消失範囲を前記第2の画像に対して重畳表示すること
を特徴とする請求項1記載の作業機の周囲監視装置。
【請求項4】
前記表示画像生成部は、前記第2の画像の中での前記仮想表示範囲および隣接する前記仮想視点画像間の領域のうち立体物の上部が消失する可能性のある範囲を示す消失範囲を前記第2の画像に対して重畳表示し、前記仮想表示範囲と前記消失範囲とを異なる表示形式で表示させること
を特徴とする請求項2記載の作業機の周囲監視装置。
【請求項5】
前記表示画像生成部は、前記第2の画像の中での前記仮想表示範囲と隣接する前記仮想視点画像間の領域のうち立体物の上部が消失する可能性のある範囲を示す消失範囲との何れか一方または両方を前記第2の画像に対して重畳表示することを可能にして、前記仮想表示範囲と前記消失範囲との両者を重畳表示するときにはこれらを異なる表示形式で表示し、
前記仮想表示範囲と前記消失範囲との何れか一方を表示するモードと両者を表示するモードと何れも表示しないモードとを切り替え可能に構成したこと
を特徴とする請求項2記載の作業機の周囲監視装置。
【請求項6】
前記カメラが取得した前記カメラ画像に基づいて障害物を検出する障害物検出部を備え、
前記表示画像生成部は、前記障害物検出部が検出した前記障害物の周囲に形成するマークを前記第1の画像と前記第2の画像との何れか一方または両方に重畳表示すること
を特徴とする請求項1乃至5の何れか1項に記載の作業機の周囲監視装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−66010(P2013−66010A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2011−202852(P2011−202852)
【出願日】平成23年9月16日(2011.9.16)
【出願人】(000005522)日立建機株式会社 (2,611)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成23年9月16日(2011.9.16)
【出願人】(000005522)日立建機株式会社 (2,611)
【Fターム(参考)】
[ Back to top ]