
作業機及び作業システム
【課題】、高価な機器を利用せずに、圃場表面を一定の深さで削る。
【解決手段】圃場作業システムは、トラクタに接続され、駆動機構により接続部分の高さ位置が変更可能とされたフレーム12と、フレームの一部を圃場200から所定高さの位置で支持する尾輪14と、圃場表面の土壌を削り、運搬する排土板16と、フレームに対する排土板の高さ方向の位置を変更する位置変更機構18と、フレームの水平面に対する角度を検出する角度検出部30と、圃場の未削部分の表面に対するフレームの高さを検出する高さ検出部34と、フレームに対する排土板の高さ方向の位置関係を検出する位置関係検出部32と、角度検出部の検出結果に基づいてフレームの角度を水平に維持するように駆動機構を制御し、当該制御状態での高さ検出部と位置関係検出部の検出結果に基づいて、位置変更機構を制御する制御部と、を備える。
【解決手段】圃場作業システムは、トラクタに接続され、駆動機構により接続部分の高さ位置が変更可能とされたフレーム12と、フレームの一部を圃場200から所定高さの位置で支持する尾輪14と、圃場表面の土壌を削り、運搬する排土板16と、フレームに対する排土板の高さ方向の位置を変更する位置変更機構18と、フレームの水平面に対する角度を検出する角度検出部30と、圃場の未削部分の表面に対するフレームの高さを検出する高さ検出部34と、フレームに対する排土板の高さ方向の位置関係を検出する位置関係検出部32と、角度検出部の検出結果に基づいてフレームの角度を水平に維持するように駆動機構を制御し、当該制御状態での高さ検出部と位置関係検出部の検出結果に基づいて、位置変更機構を制御する制御部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、作業機及び作業システムに関する。
【背景技術】
【0002】
例えば、隣接する複数の作業地(例えば、圃場)を合筆(1筆に合体)する作業において、圃場の境界にある畦畔を除去した後に段差がある場合は、その後の耕作に支障とならないように段差を解消することが必要となる。
【0003】
圃場が水田の場合、合筆前の圃場はそれぞれある程度の均平度を保った状態であるため、上段側の圃場から一定の深さの土壌を削って下段側へ移動し、下段側でその移動した土を均すことで段差を解消することができる。
【0004】
このような作業を行う場合、リヤグレーダなどを利用したり、あるいはレーザレベラを利用したりすることができる。これらのうち、リヤグレーダは、排土板を備えており、作業者が目視により作業基準を設定し、排土板の位置(高さ)を手動で調整することで圃場表面の土を移動する作業機である。一方、レーザレベラは、特許文献1〜3等に開示されているように、レーザ発光器、レーザ受光部、作業機昇降部、排土板等を備えている。このレーザレベラは、レーザ発光器から放射されるレーザ光により設定された作業基準平面に対し、排土板又は作業機を所定の位置(高さ)に自動制御することで圃場表面を均平にする作業機である。なお、レーザの代わりに、GPSを利用して排土板又は作業機を所定の位置(高さ)に自動調整する方法もある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平9−9710号公報
【特許文献2】特開2004−81173号公報
【特許文献3】特開2004−242681号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、リヤグレーダは、手動で排土板の位置を調整しながら一定の深さで土壌を削る必要があるため、作業には、熟練した技能が求められる。
【0007】
一方、レーザレベラを利用すれば、熟練した技能がなくても一定の深さで土壌を削ることは可能であるが、レーザレベラは、平均的な規模の生産者が購入するには高価である。また、レーザレベラでは、土壌を削る深さを正しく設定するために、事前に圃場の標高をくまなく測定し、圃場ごとにレーザ発光器を適正な高さに設定する作業などが必要となるため、作業が煩雑になるおそれがある。さらに、レーザに代えて、高精度なGPSを利用する場合、基地局・移動局など更に高価な装備が必要になるため生産者向けの機械ではない。また、高精度なGPSを使用してはいるものの、高さ方向の計測精度はレーザを利用する方式に比べ劣る。
【0008】
そこで本発明は、上記の課題に鑑みてなされたものであり、高価な機器を利用せずに、作業地表面の土壌を一定の深さで削り、運搬することが可能な作業機及び作業システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の作業機は、牽引装置に牽引された状態で作業地を移動する作業機であって、前記牽引装置に接続され、前記牽引装置が有する駆動機構により前記接続部分の高さ位置が変更可能とされたフレームと、前記フレームの一部を前記作業地表面から所定高さの位置で支持する尾輪と、前記作業地表面の土壌を削り、運搬する排土板と、前記フレームに対する前記排土板の高さ方向の位置を変更する位置変更機構と、前記フレームの水平面に対する角度を検出する角度検出部と、前記排土板よりも前記牽引装置側の前記作業地表面に対する前記フレームの高さを検出する高さ検出部と、前記フレームに対する前記排土板の高さ方向の位置関係を検出する位置関係検出部と、前記角度検出部の検出結果に基づいて、前記フレームの角度を水平に維持するように前記駆動機構を制御するとともに、前記フレームの角度が水平に維持された状態での前記高さ検出部と前記位置関係検出部の検出結果に基づいて、前記位置変更機構を制御する制御部と、を備えている。
【0010】
これによれば、制御部は、フレームの水平面に対する角度を検出する角度検出部の検出結果に基づいて、フレームの角度を水平に維持し、フレームの角度が水平に維持された状態で高さ検出部と位置関係検出部との検出結果に基づいて位置変更機構を制御するので、従来のようなレーザレベラやGPSのような高価な機器を利用することなく、作業地表面を一定の深さで削り、運搬することが可能である。また、位置変更機構の人手による操作は不要であるため、リヤグレーダのように熟練の技術を要せずに、作業地表面の土壌を一定の深さで削り、運搬することができる。
【0011】
この場合において、前記位置変更機構には、前記フレームに設けられた水平方向に延びる回転軸を中心として前記排土板を揺動することで、前記排土板の前記フレームに対する高さ位置を変更し、前記制御部は、前記揺動の角度に基づいて前記位置変更機構を制御することとすることができる。かかる場合には、排土板の揺動の角度を考慮した高精度な位置変更機構の制御が可能となり、作業地表面を一定の深さで削る作業を高精度に行うことが可能となる。
【0012】
この場合において、前記排土板に直接的又は間接的に固定され、前記作業地又は前記作業地近傍に設置されたレーザ発光器から発光されるレーザを受光可能なレーザ受光器を更に備え、前記制御部は、前記レーザ受光器の受光結果が一定になるように、前記位置変更機構の制御を行うこととすることができる。かかる場合には、レーザ発光器及びレーザ受光器を用いた作業地の均平作業が可能となる。
【0013】
また、前記排土板が前記作業地に接触しない状態で、前記作業地又は前記作業地近傍に設置されたレーザ発光器から発光されるレーザを受光するように前記排土板に直接的又は間接的に固定されたレーザ受光器と、前記作業地内における前記尾輪の水平面内の位置を検出する水平面内位置検出部と、を更に備え、前記制御部は、前記角度検出部の検出結果に基づいて、前記フレームの角度を水平に維持するように前記駆動機構を制御するとともに、前記レーザ受光器の受光結果が一定になるように前記位置変更機構を介して前記排土板の高さ方向の位置を変更し、当該変更の間における、前記位置関係検出部の検出結果と前記水平面内位置検出部の検出結果とに基づいて、前記作業地の測量を行うこととすることができる。かかる場合には、牽引装置により作業機が作業地内で牽引されている間に測量することができるため、時間の短縮及び労力の軽減が可能となる。また、牽引装置の自重による測量への影響が少なく、また、高さ情報の取得に、高価なGPS装置等を用いる必要が無くなる。
【0014】
本発明の作業システムは、牽引装置と、前記牽引装置に牽引された状態で作業地を移動する本発明の作業機と、を備えている。
【0015】
これによれば、本発明の作業機を備えているので、高価な機器を利用せずに、作業地表面の土壌を一定の深さで削り、運搬することができる。
【発明の効果】
【0016】
本発明の作業機及び作業システムは、高価な機器を利用せずに、作業地表面を一定の深さで削り、運搬することができるという効果を奏する。
【図面の簡単な説明】
【0017】
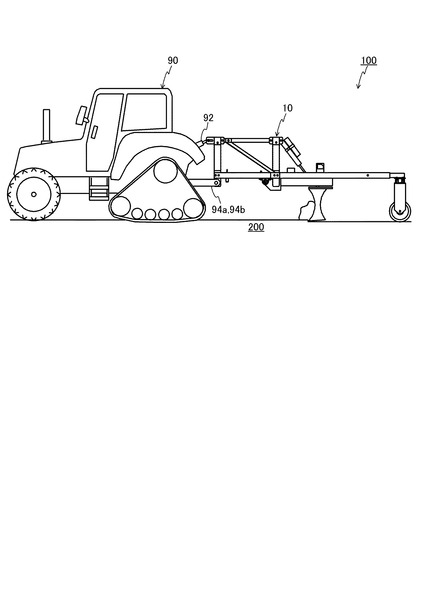
【図1】第1の実施形態に係る圃場作業システムの構成を概略的に示す図である。
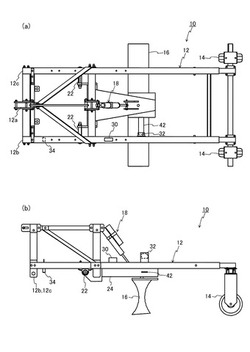
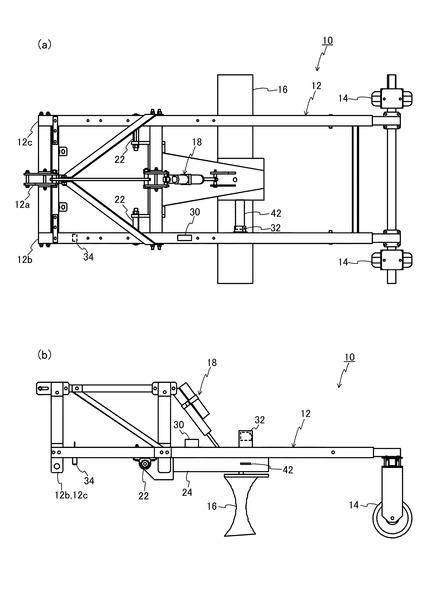
【図2】図2(a)は、図1の圃場作業機の平面図であり、図2(b)は、図1の圃場作業機の側面図である。
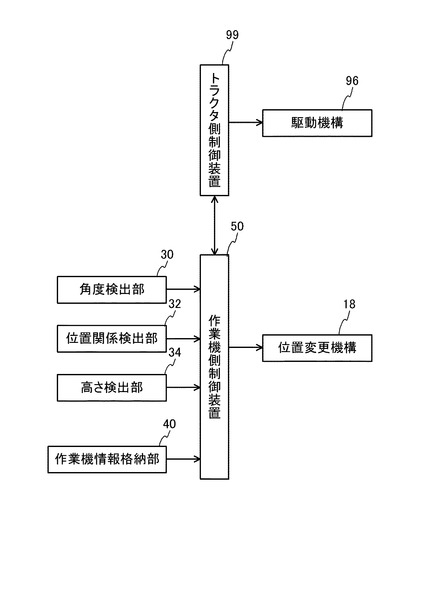
【図3】第1の実施形態の圃場作業システム100の制御系がブロック図にて示されている。
【図4】図4(a)は、圃場200上での削土・運搬作業を開始した直後の圃場作業機10の状態を示す図であり、図4(b)は、図4(a)の排土板16近傍の拡大図である。
【図5】図5(a)は、圃場200上での削土・運搬作業を開始して、ある程度の時間が経過した時点における圃場作業機10の状態を示す図であり、図5(b)は、図5(a)の排土板16近傍の拡大図である。
【図6】第2の実施形態に係る圃場作業システムの構成を概略的に示す図である。
【図7】図7(a)は、第3の実施形態に係る圃場作業システムの構成を概略的に示す図であり、図7(b)は、第3の実施形態の比較例を示す図である。
【発明を実施するための形態】
【0018】
《第1の実施形態》
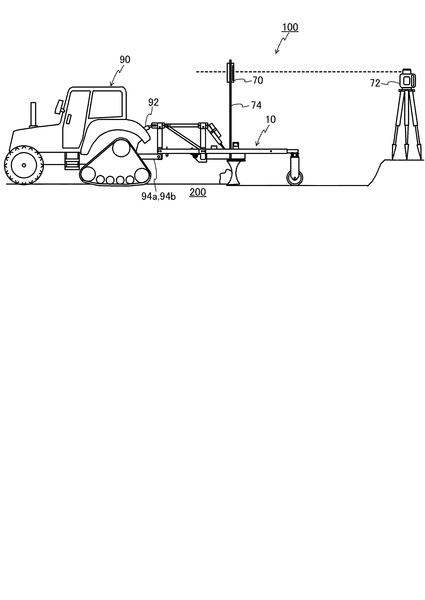
以下、第1の実施形態にかかる作業システムとしての圃場作業システム100について、図1〜図5に基づいて説明する。図1の圃場作業システム100は、牽引装置としてのトラクタ90と、作業機としての圃場作業機10とを備える。トラクタ90は、作業地としての圃場200上を圃場作業機10を牽引した状態で移動する。圃場作業機10は、トラクタに牽引された状態で、圃場200表面の土を削り、運搬する。
【0019】
トラクタ90は、一本のトップリンク92と、当該トップリンク92から等距離の位置に設けられた一対のロアリンク94a,94bと、を有する。また、トラクタ90には、トップリンク92及びロアリンク94a,94bを上下動する駆動機構96(図1では不図示、図3参照)が設けられている。駆動機構96の駆動制御は、図3に示すトラクタ側制御装置99により行われる。
【0020】
図2(a)には、圃場作業機10の平面図が示され、図2(b)には、圃場作業機10の側面図が示されている。これらの図に示すように、圃場作業機10は、フレーム12と、一対の尾輪14と、排土板16と、排土板16の高さ位置を変更する位置変更機構18と、を備える。
【0021】
フレーム12のトラクタ90側の上側端部12aは、トラクタ90のトップリンク92に接続されている。また、フレーム12のトラクタ90側の下側端部12b、12cは、トラクタ90のロアリンク94a,94bに接続されている。
【0022】
一対の尾輪14は、圃場200表面上で、フレーム12の牽引方向後側の端部(後端部)を、所定高さに維持する機能を有する。ここで、前述したフレーム上側端部12aには、長穴が形成されており、フレーム12は、当該長穴を介してトップリンク92に接続されている。このため、トラクタ90が圃場作業機10を牽引している間は、トップリンク92の連結部分と、フレーム12の上側端部12aとの牽引方向に関する位置関係が可変な状態となっている。これにより、トラクタ90により、圃場作業機10が牽引される間は、ロアリンク94a,94bと、尾輪14とにより、フレーム12が支持されるようになっている。なお、尾輪14としては、図2のような幅の狭い車輪(タイヤ)を用いる場合に限られるものではない。地表面が軟弱な場合において尾輪14が沈むのを防止するため、尾輪14として、接地圧の低い、幅広の車輪やローラ状の車輪を用いることとしてよい。
【0023】
排土板16は、フレーム12に設けられた一対の回転軸としての揺動軸22に接続された揺動体24により、吊り下げ支持されている。排土板16は、圃場200表面に接触することで圃場200表面を削るとともに、削った土を運搬する機能を有する。排土板16は、揺動軸22を中心とした揺動体24の揺動により、高さ方向の位置が変更されるようになっている。なお、本実施形態では、図2(b)のように、フレーム12の上面が水平で、かつ揺動体24の延びる方向が水平方向である場合には、尾輪14の下端部と、排土板16の下端部とが同一高さとなるように設定されているものとする。
【0024】
位置変更機構18は、シリンダ等を含み、シリンダの作用により揺動体24を揺動させることが可能となっている。すなわち、位置変更機構18は、揺動体24を揺動させることで、排土板16の高さ方向の位置を変更する。
【0025】
上記圃場作業機10のフレーム12には、更に、各種検出部が設けられている。具体的には、図2(b)等に示すように、角度検出部30と、位置関係検出部32と、高さ検出部34と、が圃場作業機10のフレーム12に設けられている。
【0026】
角度検出部30は、傾斜角センサを含み、フレーム12上面の水平面に対する傾斜角(ピッチング方向の傾斜角)を検出する。角度検出部30の検出結果は、図3の作業機側制御装置50に送信される。
【0027】
位置関係検出部32は、レーザセンサを含み、揺動体24に設けられた反射板42に対して検出光を照射し、当該反射板42における反射光を受光することで、フレーム12に対する反射板42の位置、ひいては、フレーム12に対する排土板16の位置関係を検出する。ここで、反射板42の上面の高さ方向に関する位置は、揺動軸22の中心の高さ方向に関する位置と同一となっている。したがって、本実施形態では、位置関係検出部32による検出結果と、位置関係検出部32と揺動軸22の中心との距離(既知)から、図4(b)に示す距離fを検出することができる。距離fは、揺動軸22と反射板42上面の位置関係検出部32の検出光の光軸到達点との高さ方向に関する距離を意味する。なお、位置関係検出部32の検出結果(f)は、図3の作業機側制御装置50に送信される。なお、位置関係検出部32としては、レーザセンサ以外のセンサ(例えば、超音波センサなど)を用いることとしても良い。
【0028】
高さ検出部34は、超音波センサ等の非接触式センサを含み、圃場200の未削部分(トラクタ90と排土板16との間の部分)の高さを検出する。この場合、高さ検出部34は、超音波センサと未削部分との距離b,b’(図4(a)、図5(a)参照)を検出することになる。高さ検出部34の検出結果(b、b’)は、図3の作業機側制御装置50に送信される。なお、高さ検出部34としては、超音波センサのような非接触式のセンサに限らず、接触式のセンサを用いることとしてもよい。
【0029】
図3には、本第1の実施形態の圃場作業システム100の制御系がブロック図にて示されている。この図3に示すように、圃場作業システム100では、トラクタ90に設けられたトラクタ側制御装置99と、制御部としての作業機側制御装置50とが連携して、圃場作業機10による圃場表面の削土、及び運搬の制御を行う。なお、図3に示すように作業機側制御装置50には、作業機情報格納部40が接続されている。作業機情報格納部40には、圃場作業機10に関する既知の値(後述)が格納されている。
【0030】
次に、本第1の実施形態の圃場作業システム100における処理について、図4、図5に基づいて、詳細に説明する。
【0031】
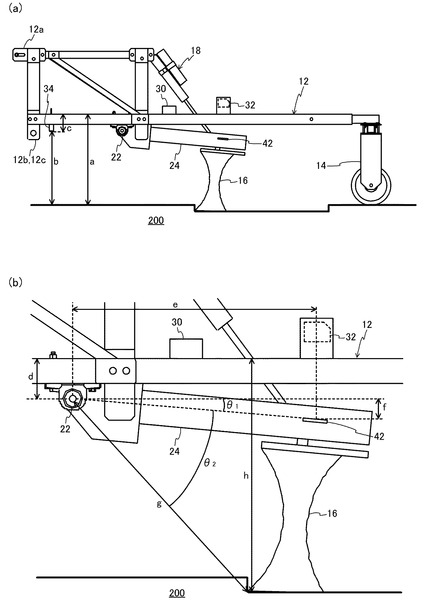
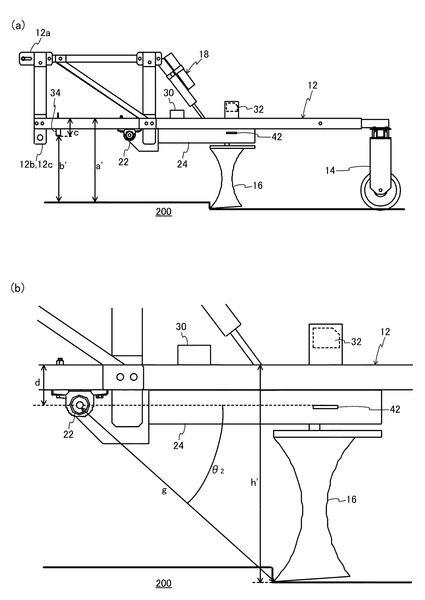
図4(a)には、圃場200上での削土・運搬作業を開始した直後の圃場作業機10の状態が示され、図4(b)には、図4(a)の排土板16近傍の拡大図が示されている。また、図5(a)には、圃場200上での削土・運搬作業を開始して、ある程度の時間が経過した時点における圃場作業機10の状態が示され、図5(b)には、図5(a)の排土板16近傍の拡大図が示されている。
【0032】
作業機側制御装置50は、角度検出部30の検出結果に基づいて、フレーム12の上面の傾斜角(ピッチング方向の傾斜角)を常時取得する。そして、作業機側制御装置50は、当該取得した傾斜角に基づいて、トラクタ側制御装置99に対して、フレーム12の上面が常時水平となるよう指示を出す。
【0033】
これに対し、トラクタ側制御装置99では、作業機側制御装置50からの指示に基づいて、駆動機構96を駆動し、フレームの下側端部12b,12cを上下方向に移動させ、フレーム12の上面を水平に維持する。
【0034】
また、作業機側制御装置50は、フレーム12の上面が水平に維持された状態で、位置関係検出部32の検出結果と、高さ検出部34の検出結果とを用いて、排土板16の高さ調整を行う。具体的には、圃場200の未削部分の表面と排土板16の下端部との高さ差(削土深さ)が一定となるように排土板の高さ位置を調整する。この場合、図4(a)、図4(b)の場合であれば、削土深さは、h−aとなり、図5(a)、図5(b)の場合であれば、削土深さは、h’−a’となる。
【0035】
ここで、図4(a)、図4(b)の場合の削土深さ(h−a)について説明する。
【0036】
aは、フレーム12上面と圃場200の未削部分表面との距離であり、高さ検出部34の検出値bと、フレーム12上面と高さ検出部34との距離c(既知)とを用いれば、次式(1)のように表すことができる。
a=b+c …(1)
なお、既知の距離cは、作業機情報格納部40に格納されているものとする。
【0037】
また、前述のように、位置関係検出部32の検出値と、位置関係検出部32と揺動軸22の中心との高さ方向に関する距離(既知)とからは、距離f(揺動軸22と反射板42上面の位置関係検出部32の検出光の光軸到達点との高さ方向に関する距離)が検出される。そして、当該距離f、及び揺動軸22の中心と位置関係検出部32との水平方向に関する距離e(既知)を用いれば、揺動軸22の中心を通る水平面と反射板42上面とがなす角θ1は、次式(2)のように表すことができる。
θ1=tan-1(f/e) …(2)
【0038】
なお、上記既知の値(位置関係検出部32と揺動軸22の中心との高さ方向に関する距離、及び揺動軸22の中心と位置関係検出部32との水平方向に関する距離e)は、作業機情報格納部40に格納されているものとする。
【0039】
更に、揺動体24が延びる方向と、揺動軸22の中心と排土板16下端部とを結ぶ方向とがなす角をθ2(既知)とし、揺動軸22の中心と排土板16下端部との距離をgとすると、hは、次式(3)のように表すことができる。
h=d+g・sin(θ1+θ2) …(3)
なお、既知の値θ2及びgは、作業機情報格納部40に格納されているものとする。
【0040】
したがって、削土深さ(h−a)は、上式(1)〜(3)より、次式(4)のように表すことができる。
h−a=d+g・sin(tan-1(f/e)+θ2)−(b+c) …(4)
【0041】
ここで、上式(4)の右辺は、検出値b、f及び既知の値を含んでいるのみである。したがって、作業機側制御装置50は、削土深さ(h−a)の値を正確に算出することができるため、当該削土深さ(h−a)が予め定められた値となるように、位置変更機構18のシリンダを制御することで、削土深さを一定に維持するようにする。
【0042】
一方、図5(a)、図5(b)の場合には、既に尾輪14が圃場200の既削部分に位置しており、尾輪14の下端部と排土板16の下端部とは、同一高さとなっている。この場合、図5(a)より、フレーム12上面と圃場200の未削部分表面との距離a’は、高さ検出部34の検出値b’と、フレーム12上面と高さ検出部34との距離c(既知)とから、次式(5)のように表すことができる。
a’=b’+c …(5)
【0043】
また、h’は、次式(6)にて表すことができる。
h’=d+g・sin θ2 …(6)
【0044】
したがって、削土深さ(h’−a’)は、上式(5)、(6)より、次式(7)のように表すことができる。
h’−a’=d+g・sinθ2−(b’+c) …(7)
【0045】
ここで、上式(4)の右辺は、検出値b’及び既知の値を含んでいるのみである。したがって、作業機側制御装置50は、削土深さ(h’−a’)の値を正確に算出することができる。ここで、圃場200の未削部分が一定高さに均されている場合には、排土板16の高さを変更しなくとも削土深さを一定に維持することができるため、以降の位置変更機構18の制御が不要である。しかしながら、圃場200の未削部分の凹凸によっては、位置変更機構18による制御が必要なる場合がある。この場合、位置変更機構18を制御すると、図4(b)と同様、角度θ1が、削土深さ(h’−a’)に対して影響を与えるようになる。この場合、作業機側制御装置50は、上式(4)に基づいて導き出される次式(4)’に基づいて、削土深さ(h’−a’)が予め定められた値となるように、位置変更機構18を制御すればよい。
h’−a’=d+g・sin(tan-1(f’/e)+θ2)−(b’+c)
…(4)’
【0046】
なお、上式(4)’の値f’は、値fと同様、位置関係検出部32の検出結果から求められる値である。
【0047】
以上のようにすることで、圃場200の未削部分の表面から一定の深さで、圃場200表面を削土し、運搬することが可能となる。
【0048】
以上、詳細に説明したように、本第1の実施形態によると、作業機側制御装置50は、フレーム12の水平面に対する角度を検出する角度検出部30の検出結果に基づいて、フレーム12の角度を水平に維持するように、トラクタ側制御装置99を介して駆動機構96の駆動を制御する。そして、作業機側制御装置50は、フレーム12の角度が水平に維持された状態で、圃場の未削部分に対するフレーム12の高さを検出する高さ検出部34の検出結果(b、b’)と、フレームに対する排土板16の高さ方向の位置関係を検出する位置関係検出部32の検出結果(f、f’)と、に基づいて位置変更機構18を制御する(上式(4)、(4)’参照)。これにより、本第1の実施形態では、レーザレベラやGPSのような高価な機器を利用せずに、圃場表面の土壌を一定の深さで削り、運搬することが可能である。また、位置変更機構18の人手による操作は不要であるため、リヤグレーダのように熟練の技術を要せずに、土壌を一定の深さで削り、運搬することができる。
【0049】
また、本第1の実施形態では、排土板16が、揺動軸22を中心とした揺動により、フレーム12との高さ位置が変更され、作業機側制御装置50は、揺動時の角度(θ1)にも基づいて、位置変更機構18を制御することとしている。これにより、本第1の実施形態では、高精度な排土板16の位置変更が可能となり、ひいては高精度な圃場表面の削土が可能となる。
【0050】
なお、上記第1の実施形態では、角度検出部30、位置関係検出部32、高さ検出部34のそれぞれを、1つずつ設ける場合について説明したが、これに限られるものではない。例えば、各検出部を複数個ずつ設けることとしてもよい。この場合、水平面内において牽引方向に直交する方向に離れた位置に同一種類の検出部を設け、それらの平均値を用いて上記第1の実施形態と同様の処理を行うこととすれば、より高精度に上記作業を行うことができる。特に、高さ検出部34を複数用いることとすれば、圃場表面に凹凸がある場合でも圃場表面の土壌を一定の深さで削る作業を精度良く行うことができる。
【0051】
なお、上記第1の実施形態では、作業機側制御装置50は、排土板16の揺動時の角度(θ1)を考慮して、排土板16の高さ位置を調整する場合について説明したが、これに限られるものではない。例えば、揺動時の角度(θ1)が排土板16の高さ位置の制御に与える影響が小さい場合には、角度θ1を考慮しなくてもよい。この場合、作業機側制御装置50は、例えば、反射板42と排土板16の下端部との高さ方向に関する距離x、位置関係検出部32の検出値から得られるフレーム12上面から反射板42までの距離y、及びフレーム12上面から未削部分までの距離aを用いた値(x+y−a)が一定となるように、位置変更機構18を制御するようにすればよい。
【0052】
なお、上記第1の実施形態では、排土板16を揺動軸22を中心として揺動させることで、排土板16の高さ位置を変更する場合について説明したが、これに限られるものではない。例えば、排土板16を高さ方向に延びるガイドに沿って高さ方向に移動させるようにしてもよい。この場合、上記の値(x+y−a)が一定となるように、位置変更機構18を制御するようにすればよい。
【0053】
なお、上記第1の実施形態では、圃場作業システム100による作業を行う前に、圃場200の土壌表面を掘り起こし、乾燥させ、均しておいてもよい。このようにすることで、圃場作業機10における削土、運搬時の負荷を軽減することができる。また、圃場作業機10の排土板16よりも前側(トラクタ側)に土壌を耕耘し、均すための装置を設けることとしてもよい。
【0054】
なお、上記第1の実施形態では、尾輪14をフレーム12の牽引方向後端部に設け、当該後端部の圃場表面からの高さを所定高さに維持する場合について説明したが、これに限られるものではない。尾輪14は、フレーム12の牽引方向後端部以外の部分に設けることとしてもよい。
【0055】
《第2の実施形態》
次に、第2の実施形態について、図6に基づいて、説明する。本第2の実施形態では、第1の実施形態の構成に加えて、圃場作業機10が、レーザレベラで用いられるレーザ受光器70を備えている点に特徴を有している。
【0056】
レーザ受光器70は、図6に示すように、排土板16に立てられたポール74の上端部近傍に固定されている。なお、ポール74は、排土板16が接続されている揺動体24に立てられてもよい。すなわち、レーザ受光器70は、排土板16に直接的又は間接的に固定されていればよい。また、本第2の実施形態では、圃場200内又は圃場200近傍に、レーザ発光器72が設けられる。なお、従来方式のレーザレベラには、トラクタ直装式とけん引式があるが、本第2の実施形態では、けん引式レベラと同等の構成のレーザレベラを採用することができる。すなわち、レーザコントロール装置はトラクタ90側ではなく、圃場作業機10側に装備することになる。このため、従来のけん引式レベラと同様、レーザ制御機能を装備しないトラクタでも作業が可能となる。
【0057】
本第2の実施形態の作業機側制御装置50では、レーザ発光器72から発光されるレーザの、レーザ受光器70における受光結果が一定となるように、排土板16の高さ位置を位置変更機構18を制御して変更する。このようにすることで、圃場200表面を所定高さに均すことができる。
【0058】
なお、ポール74は、排土板16や揺動体24が水平面に対して傾いた場合でも、ポール74が常に垂直に近い状態となるように維持できる台座に固定されることが好ましい。
【0059】
以上、説明したように、本第2の実施形態によると、上記第1の実施形態の構成に加え、排土板16に直接的又は間接的に固定されたレーザ受光器70を備えており、レーザ受光器70が圃場200又は圃場200近傍に設置されたレーザ発光器72から発光されるレーザを受光したときの受光結果が一定になるように、作業機側制御装置50が、位置変更機構18の制御を行う。このようにすることで、本第2の実施形態では、圃場作業機10を用いた圃場の均平作業が可能となる。
【0060】
また、本第2の実施形態では、フレームをロアリンク94a,94bと尾輪14で支持するため、圃場の凹凸に起因するトラクタのピッチングの影響を比較的受けにくいという効果を奏する。また、本第2の実施形態では、駆動機構96により、フレーム12を水平に維持することができるため、従来のけん引式レベラ以上にトラクタのピッチングの影響を抑制することができる。
【0061】
《第3の実施形態》
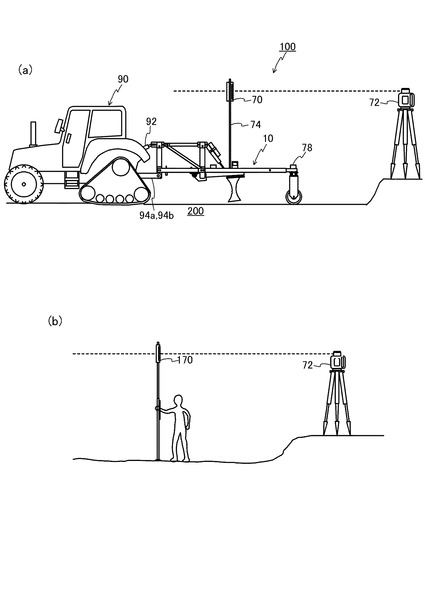
次に、第3の実施形態について、図7(a)に基づいて説明する。従来のように、レーザやGPSを使って均平作業を行うためには、作業の前に圃場全体の高低差をくまなく測定し、運土計画を立てることが必要とされている。そこで、本第3の実施形態では、均平作業を行う前の、圃場全体の高低差を測量する作業に、圃場作業システム100を利用する場合について説明する。
【0062】
本第3の実施形態では、図7(a)に示すように、圃場作業機10が、上記第2の実施形態と同様、レーザレベラで用いられるレーザ受光器70を備えているとともに、水平面内位置検出部としてのGPS受信機78を備えている。
【0063】
ここで、GPS受信機78は、圃場作業機10の位置情報を取得するための装置である。GPS受信機78の取り付け位置は、尾輪14の直上付近とする。
【0064】
本第3の実施形態では、排土板16が常に圃場200表面を削土しない高さに位置した状態、すなわち、排土板16が常に圃場200表面から浮いた状態で、レーザ発光器72から発光されるレーザを受光できる位置に、レーザ受光器70をポール74を介して取り付ける。なお、ポール74は、揺動体24に設けられてもよい。すなわち、レーザ受光器70は、排土板16に対して直接的又は間接的に固定されていればよい。
【0065】
そして、作業機側制御装置50は、レーザ受光器70による受光結果が一定となるように、位置変更機構18を介して排土板16の高さ制御を行うとともに、駆動機構96を介してフレーム12上面の水平を維持しつつ、トラクタ90を圃場200内で走行させる。この場合、一定の高さに保たれている排土板16に対し、フレーム12が上下しながら進むということになる。
【0066】
作業機側制御装置50は、上記走行中、位置関係検出部32の検出結果と、GPS受信機78の検出結果(緯度、経度)を取得する。この場合において位置関係検出部32から得られる、フレーム12に対する排土板16の相対位置の値(高さ方向に関する距離)は、圃場200表面の高さを表す。したがって、作業機側制御装置50は、位置関係検出部32から得られる圃場200表面の高さと、当該表面の高さが得られた時点におけるGPS受信機78の検出結果(緯度、経度)を関連付けて記録することで、圃場200の高低差マップの作成(測量)を行うことが可能となる。
【0067】
なお、本第3の実施形態においても、上記第2の実施形態と同様、ポール74は、排土板16や揺動体24が水平面に対して傾いた場合でも、ポール74が常に垂直に近い状態となるように維持できる台座に固定されることが好ましい。
【0068】
以上、説明したように、本第3の実施形態によると、レーザ受光器70が、排土板16が圃場200に接触しない状態で、レーザ発光器72から発光されるレーザを受光するように排土板16に直接的又は間接的に固定されており、作業機側制御装置50は、角度検出部30の検出結果に基づいて、フレーム12の角度を水平に維持するように駆動機構96を制御するとともに、レーザ受光器70の受光結果が一定になるように位置変更機構18を介して排土板16の高さ方向の位置を変更し、当該変更の間における、位置関係検出部の検出結果とGPS受信機78の検出結果(圃場200内における尾輪14の水平面内の位置)とに基づいて、圃場200の測量を行う。これにより、本第3の実施形態では、簡易な方法で、圃場200の測量を行うことが可能となる。ここで、従来は、例えば、図7(b)の比較例の図に示すように測量用の受光器170を用い、レーザ発光器72による基準平面からの標高差を測定する方法や、トラクタに高さ情報の取得が可能なGPS受信装置を取り付けて圃場をくまなく走行し、GPSの高さ情報、緯度、経度情報を取得する方法などがあった。しかし、図7(b)のような方法では、多くの時間と労力が必要である。また、高さ情報の取得が可能なGPS受信装置をトラクタに取り付ける方法では、トラクタの自重により車輪が沈んだ場合は正確に測量ができず、更に、高さ情報取得精度がGPS受信装置の測定精度に依存するおそれがあった。これに対し、本第3の実施形態では、トラクタを圃場内で走行させている間に測量ができるため、時間の短縮及び労力の軽減が可能となる。また、本第3の実施形態では、トラクタの自重による影響がなく、また、高さ情報の取得に、高さ情報を高精度に取得するための高価なGPS装置を用いる必要が無い。
【0069】
なお、上記第2の実施形態を用いて、圃場200の均平作業を行った後に、上記第3の実施形態を用いて、圃場200の測量作業を行うこととしてもよい。この場合、測量結果を用いることで、圃場の均平作業が完了したか否かを判断することが可能となる。
【0070】
なお、上記各実施形態では、作業地が圃場200である場合について説明したが、これに限られるものではない。作業地は、圃場以外の領域(例えば、学校の校庭や砂浜、宅地など)であってもよい。
【0071】
上述した実施形態は本発明の好適な実施の例である。但し、これに限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変形実施可能である。
【符号の説明】
【0072】
10 圃場作業機(作業機)
12 フレーム
14 尾輪
16 排土板
18 位置変更機構
22 揺動軸(回転軸)
30 角度検出部
32 位置関係検出部
34 高さ検出部
50 作業機側制御装置(制御部)
70 レーザ受光器
72 レーザ発光器
78 GPS受信機(水平面内位置検出部)
90 トラクタ(牽引装置)
100 圃場作業システム(作業システム)
200 圃場(作業地)
【技術分野】
【0001】
本発明は、作業機及び作業システムに関する。
【背景技術】
【0002】
例えば、隣接する複数の作業地(例えば、圃場)を合筆(1筆に合体)する作業において、圃場の境界にある畦畔を除去した後に段差がある場合は、その後の耕作に支障とならないように段差を解消することが必要となる。
【0003】
圃場が水田の場合、合筆前の圃場はそれぞれある程度の均平度を保った状態であるため、上段側の圃場から一定の深さの土壌を削って下段側へ移動し、下段側でその移動した土を均すことで段差を解消することができる。
【0004】
このような作業を行う場合、リヤグレーダなどを利用したり、あるいはレーザレベラを利用したりすることができる。これらのうち、リヤグレーダは、排土板を備えており、作業者が目視により作業基準を設定し、排土板の位置(高さ)を手動で調整することで圃場表面の土を移動する作業機である。一方、レーザレベラは、特許文献1〜3等に開示されているように、レーザ発光器、レーザ受光部、作業機昇降部、排土板等を備えている。このレーザレベラは、レーザ発光器から放射されるレーザ光により設定された作業基準平面に対し、排土板又は作業機を所定の位置(高さ)に自動制御することで圃場表面を均平にする作業機である。なお、レーザの代わりに、GPSを利用して排土板又は作業機を所定の位置(高さ)に自動調整する方法もある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平9−9710号公報
【特許文献2】特開2004−81173号公報
【特許文献3】特開2004−242681号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、リヤグレーダは、手動で排土板の位置を調整しながら一定の深さで土壌を削る必要があるため、作業には、熟練した技能が求められる。
【0007】
一方、レーザレベラを利用すれば、熟練した技能がなくても一定の深さで土壌を削ることは可能であるが、レーザレベラは、平均的な規模の生産者が購入するには高価である。また、レーザレベラでは、土壌を削る深さを正しく設定するために、事前に圃場の標高をくまなく測定し、圃場ごとにレーザ発光器を適正な高さに設定する作業などが必要となるため、作業が煩雑になるおそれがある。さらに、レーザに代えて、高精度なGPSを利用する場合、基地局・移動局など更に高価な装備が必要になるため生産者向けの機械ではない。また、高精度なGPSを使用してはいるものの、高さ方向の計測精度はレーザを利用する方式に比べ劣る。
【0008】
そこで本発明は、上記の課題に鑑みてなされたものであり、高価な機器を利用せずに、作業地表面の土壌を一定の深さで削り、運搬することが可能な作業機及び作業システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の作業機は、牽引装置に牽引された状態で作業地を移動する作業機であって、前記牽引装置に接続され、前記牽引装置が有する駆動機構により前記接続部分の高さ位置が変更可能とされたフレームと、前記フレームの一部を前記作業地表面から所定高さの位置で支持する尾輪と、前記作業地表面の土壌を削り、運搬する排土板と、前記フレームに対する前記排土板の高さ方向の位置を変更する位置変更機構と、前記フレームの水平面に対する角度を検出する角度検出部と、前記排土板よりも前記牽引装置側の前記作業地表面に対する前記フレームの高さを検出する高さ検出部と、前記フレームに対する前記排土板の高さ方向の位置関係を検出する位置関係検出部と、前記角度検出部の検出結果に基づいて、前記フレームの角度を水平に維持するように前記駆動機構を制御するとともに、前記フレームの角度が水平に維持された状態での前記高さ検出部と前記位置関係検出部の検出結果に基づいて、前記位置変更機構を制御する制御部と、を備えている。
【0010】
これによれば、制御部は、フレームの水平面に対する角度を検出する角度検出部の検出結果に基づいて、フレームの角度を水平に維持し、フレームの角度が水平に維持された状態で高さ検出部と位置関係検出部との検出結果に基づいて位置変更機構を制御するので、従来のようなレーザレベラやGPSのような高価な機器を利用することなく、作業地表面を一定の深さで削り、運搬することが可能である。また、位置変更機構の人手による操作は不要であるため、リヤグレーダのように熟練の技術を要せずに、作業地表面の土壌を一定の深さで削り、運搬することができる。
【0011】
この場合において、前記位置変更機構には、前記フレームに設けられた水平方向に延びる回転軸を中心として前記排土板を揺動することで、前記排土板の前記フレームに対する高さ位置を変更し、前記制御部は、前記揺動の角度に基づいて前記位置変更機構を制御することとすることができる。かかる場合には、排土板の揺動の角度を考慮した高精度な位置変更機構の制御が可能となり、作業地表面を一定の深さで削る作業を高精度に行うことが可能となる。
【0012】
この場合において、前記排土板に直接的又は間接的に固定され、前記作業地又は前記作業地近傍に設置されたレーザ発光器から発光されるレーザを受光可能なレーザ受光器を更に備え、前記制御部は、前記レーザ受光器の受光結果が一定になるように、前記位置変更機構の制御を行うこととすることができる。かかる場合には、レーザ発光器及びレーザ受光器を用いた作業地の均平作業が可能となる。
【0013】
また、前記排土板が前記作業地に接触しない状態で、前記作業地又は前記作業地近傍に設置されたレーザ発光器から発光されるレーザを受光するように前記排土板に直接的又は間接的に固定されたレーザ受光器と、前記作業地内における前記尾輪の水平面内の位置を検出する水平面内位置検出部と、を更に備え、前記制御部は、前記角度検出部の検出結果に基づいて、前記フレームの角度を水平に維持するように前記駆動機構を制御するとともに、前記レーザ受光器の受光結果が一定になるように前記位置変更機構を介して前記排土板の高さ方向の位置を変更し、当該変更の間における、前記位置関係検出部の検出結果と前記水平面内位置検出部の検出結果とに基づいて、前記作業地の測量を行うこととすることができる。かかる場合には、牽引装置により作業機が作業地内で牽引されている間に測量することができるため、時間の短縮及び労力の軽減が可能となる。また、牽引装置の自重による測量への影響が少なく、また、高さ情報の取得に、高価なGPS装置等を用いる必要が無くなる。
【0014】
本発明の作業システムは、牽引装置と、前記牽引装置に牽引された状態で作業地を移動する本発明の作業機と、を備えている。
【0015】
これによれば、本発明の作業機を備えているので、高価な機器を利用せずに、作業地表面の土壌を一定の深さで削り、運搬することができる。
【発明の効果】
【0016】
本発明の作業機及び作業システムは、高価な機器を利用せずに、作業地表面を一定の深さで削り、運搬することができるという効果を奏する。
【図面の簡単な説明】
【0017】
【図1】第1の実施形態に係る圃場作業システムの構成を概略的に示す図である。
【図2】図2(a)は、図1の圃場作業機の平面図であり、図2(b)は、図1の圃場作業機の側面図である。
【図3】第1の実施形態の圃場作業システム100の制御系がブロック図にて示されている。
【図4】図4(a)は、圃場200上での削土・運搬作業を開始した直後の圃場作業機10の状態を示す図であり、図4(b)は、図4(a)の排土板16近傍の拡大図である。
【図5】図5(a)は、圃場200上での削土・運搬作業を開始して、ある程度の時間が経過した時点における圃場作業機10の状態を示す図であり、図5(b)は、図5(a)の排土板16近傍の拡大図である。
【図6】第2の実施形態に係る圃場作業システムの構成を概略的に示す図である。
【図7】図7(a)は、第3の実施形態に係る圃場作業システムの構成を概略的に示す図であり、図7(b)は、第3の実施形態の比較例を示す図である。
【発明を実施するための形態】
【0018】
《第1の実施形態》
以下、第1の実施形態にかかる作業システムとしての圃場作業システム100について、図1〜図5に基づいて説明する。図1の圃場作業システム100は、牽引装置としてのトラクタ90と、作業機としての圃場作業機10とを備える。トラクタ90は、作業地としての圃場200上を圃場作業機10を牽引した状態で移動する。圃場作業機10は、トラクタに牽引された状態で、圃場200表面の土を削り、運搬する。
【0019】
トラクタ90は、一本のトップリンク92と、当該トップリンク92から等距離の位置に設けられた一対のロアリンク94a,94bと、を有する。また、トラクタ90には、トップリンク92及びロアリンク94a,94bを上下動する駆動機構96(図1では不図示、図3参照)が設けられている。駆動機構96の駆動制御は、図3に示すトラクタ側制御装置99により行われる。
【0020】
図2(a)には、圃場作業機10の平面図が示され、図2(b)には、圃場作業機10の側面図が示されている。これらの図に示すように、圃場作業機10は、フレーム12と、一対の尾輪14と、排土板16と、排土板16の高さ位置を変更する位置変更機構18と、を備える。
【0021】
フレーム12のトラクタ90側の上側端部12aは、トラクタ90のトップリンク92に接続されている。また、フレーム12のトラクタ90側の下側端部12b、12cは、トラクタ90のロアリンク94a,94bに接続されている。
【0022】
一対の尾輪14は、圃場200表面上で、フレーム12の牽引方向後側の端部(後端部)を、所定高さに維持する機能を有する。ここで、前述したフレーム上側端部12aには、長穴が形成されており、フレーム12は、当該長穴を介してトップリンク92に接続されている。このため、トラクタ90が圃場作業機10を牽引している間は、トップリンク92の連結部分と、フレーム12の上側端部12aとの牽引方向に関する位置関係が可変な状態となっている。これにより、トラクタ90により、圃場作業機10が牽引される間は、ロアリンク94a,94bと、尾輪14とにより、フレーム12が支持されるようになっている。なお、尾輪14としては、図2のような幅の狭い車輪(タイヤ)を用いる場合に限られるものではない。地表面が軟弱な場合において尾輪14が沈むのを防止するため、尾輪14として、接地圧の低い、幅広の車輪やローラ状の車輪を用いることとしてよい。
【0023】
排土板16は、フレーム12に設けられた一対の回転軸としての揺動軸22に接続された揺動体24により、吊り下げ支持されている。排土板16は、圃場200表面に接触することで圃場200表面を削るとともに、削った土を運搬する機能を有する。排土板16は、揺動軸22を中心とした揺動体24の揺動により、高さ方向の位置が変更されるようになっている。なお、本実施形態では、図2(b)のように、フレーム12の上面が水平で、かつ揺動体24の延びる方向が水平方向である場合には、尾輪14の下端部と、排土板16の下端部とが同一高さとなるように設定されているものとする。
【0024】
位置変更機構18は、シリンダ等を含み、シリンダの作用により揺動体24を揺動させることが可能となっている。すなわち、位置変更機構18は、揺動体24を揺動させることで、排土板16の高さ方向の位置を変更する。
【0025】
上記圃場作業機10のフレーム12には、更に、各種検出部が設けられている。具体的には、図2(b)等に示すように、角度検出部30と、位置関係検出部32と、高さ検出部34と、が圃場作業機10のフレーム12に設けられている。
【0026】
角度検出部30は、傾斜角センサを含み、フレーム12上面の水平面に対する傾斜角(ピッチング方向の傾斜角)を検出する。角度検出部30の検出結果は、図3の作業機側制御装置50に送信される。
【0027】
位置関係検出部32は、レーザセンサを含み、揺動体24に設けられた反射板42に対して検出光を照射し、当該反射板42における反射光を受光することで、フレーム12に対する反射板42の位置、ひいては、フレーム12に対する排土板16の位置関係を検出する。ここで、反射板42の上面の高さ方向に関する位置は、揺動軸22の中心の高さ方向に関する位置と同一となっている。したがって、本実施形態では、位置関係検出部32による検出結果と、位置関係検出部32と揺動軸22の中心との距離(既知)から、図4(b)に示す距離fを検出することができる。距離fは、揺動軸22と反射板42上面の位置関係検出部32の検出光の光軸到達点との高さ方向に関する距離を意味する。なお、位置関係検出部32の検出結果(f)は、図3の作業機側制御装置50に送信される。なお、位置関係検出部32としては、レーザセンサ以外のセンサ(例えば、超音波センサなど)を用いることとしても良い。
【0028】
高さ検出部34は、超音波センサ等の非接触式センサを含み、圃場200の未削部分(トラクタ90と排土板16との間の部分)の高さを検出する。この場合、高さ検出部34は、超音波センサと未削部分との距離b,b’(図4(a)、図5(a)参照)を検出することになる。高さ検出部34の検出結果(b、b’)は、図3の作業機側制御装置50に送信される。なお、高さ検出部34としては、超音波センサのような非接触式のセンサに限らず、接触式のセンサを用いることとしてもよい。
【0029】
図3には、本第1の実施形態の圃場作業システム100の制御系がブロック図にて示されている。この図3に示すように、圃場作業システム100では、トラクタ90に設けられたトラクタ側制御装置99と、制御部としての作業機側制御装置50とが連携して、圃場作業機10による圃場表面の削土、及び運搬の制御を行う。なお、図3に示すように作業機側制御装置50には、作業機情報格納部40が接続されている。作業機情報格納部40には、圃場作業機10に関する既知の値(後述)が格納されている。
【0030】
次に、本第1の実施形態の圃場作業システム100における処理について、図4、図5に基づいて、詳細に説明する。
【0031】
図4(a)には、圃場200上での削土・運搬作業を開始した直後の圃場作業機10の状態が示され、図4(b)には、図4(a)の排土板16近傍の拡大図が示されている。また、図5(a)には、圃場200上での削土・運搬作業を開始して、ある程度の時間が経過した時点における圃場作業機10の状態が示され、図5(b)には、図5(a)の排土板16近傍の拡大図が示されている。
【0032】
作業機側制御装置50は、角度検出部30の検出結果に基づいて、フレーム12の上面の傾斜角(ピッチング方向の傾斜角)を常時取得する。そして、作業機側制御装置50は、当該取得した傾斜角に基づいて、トラクタ側制御装置99に対して、フレーム12の上面が常時水平となるよう指示を出す。
【0033】
これに対し、トラクタ側制御装置99では、作業機側制御装置50からの指示に基づいて、駆動機構96を駆動し、フレームの下側端部12b,12cを上下方向に移動させ、フレーム12の上面を水平に維持する。
【0034】
また、作業機側制御装置50は、フレーム12の上面が水平に維持された状態で、位置関係検出部32の検出結果と、高さ検出部34の検出結果とを用いて、排土板16の高さ調整を行う。具体的には、圃場200の未削部分の表面と排土板16の下端部との高さ差(削土深さ)が一定となるように排土板の高さ位置を調整する。この場合、図4(a)、図4(b)の場合であれば、削土深さは、h−aとなり、図5(a)、図5(b)の場合であれば、削土深さは、h’−a’となる。
【0035】
ここで、図4(a)、図4(b)の場合の削土深さ(h−a)について説明する。
【0036】
aは、フレーム12上面と圃場200の未削部分表面との距離であり、高さ検出部34の検出値bと、フレーム12上面と高さ検出部34との距離c(既知)とを用いれば、次式(1)のように表すことができる。
a=b+c …(1)
なお、既知の距離cは、作業機情報格納部40に格納されているものとする。
【0037】
また、前述のように、位置関係検出部32の検出値と、位置関係検出部32と揺動軸22の中心との高さ方向に関する距離(既知)とからは、距離f(揺動軸22と反射板42上面の位置関係検出部32の検出光の光軸到達点との高さ方向に関する距離)が検出される。そして、当該距離f、及び揺動軸22の中心と位置関係検出部32との水平方向に関する距離e(既知)を用いれば、揺動軸22の中心を通る水平面と反射板42上面とがなす角θ1は、次式(2)のように表すことができる。
θ1=tan-1(f/e) …(2)
【0038】
なお、上記既知の値(位置関係検出部32と揺動軸22の中心との高さ方向に関する距離、及び揺動軸22の中心と位置関係検出部32との水平方向に関する距離e)は、作業機情報格納部40に格納されているものとする。
【0039】
更に、揺動体24が延びる方向と、揺動軸22の中心と排土板16下端部とを結ぶ方向とがなす角をθ2(既知)とし、揺動軸22の中心と排土板16下端部との距離をgとすると、hは、次式(3)のように表すことができる。
h=d+g・sin(θ1+θ2) …(3)
なお、既知の値θ2及びgは、作業機情報格納部40に格納されているものとする。
【0040】
したがって、削土深さ(h−a)は、上式(1)〜(3)より、次式(4)のように表すことができる。
h−a=d+g・sin(tan-1(f/e)+θ2)−(b+c) …(4)
【0041】
ここで、上式(4)の右辺は、検出値b、f及び既知の値を含んでいるのみである。したがって、作業機側制御装置50は、削土深さ(h−a)の値を正確に算出することができるため、当該削土深さ(h−a)が予め定められた値となるように、位置変更機構18のシリンダを制御することで、削土深さを一定に維持するようにする。
【0042】
一方、図5(a)、図5(b)の場合には、既に尾輪14が圃場200の既削部分に位置しており、尾輪14の下端部と排土板16の下端部とは、同一高さとなっている。この場合、図5(a)より、フレーム12上面と圃場200の未削部分表面との距離a’は、高さ検出部34の検出値b’と、フレーム12上面と高さ検出部34との距離c(既知)とから、次式(5)のように表すことができる。
a’=b’+c …(5)
【0043】
また、h’は、次式(6)にて表すことができる。
h’=d+g・sin θ2 …(6)
【0044】
したがって、削土深さ(h’−a’)は、上式(5)、(6)より、次式(7)のように表すことができる。
h’−a’=d+g・sinθ2−(b’+c) …(7)
【0045】
ここで、上式(4)の右辺は、検出値b’及び既知の値を含んでいるのみである。したがって、作業機側制御装置50は、削土深さ(h’−a’)の値を正確に算出することができる。ここで、圃場200の未削部分が一定高さに均されている場合には、排土板16の高さを変更しなくとも削土深さを一定に維持することができるため、以降の位置変更機構18の制御が不要である。しかしながら、圃場200の未削部分の凹凸によっては、位置変更機構18による制御が必要なる場合がある。この場合、位置変更機構18を制御すると、図4(b)と同様、角度θ1が、削土深さ(h’−a’)に対して影響を与えるようになる。この場合、作業機側制御装置50は、上式(4)に基づいて導き出される次式(4)’に基づいて、削土深さ(h’−a’)が予め定められた値となるように、位置変更機構18を制御すればよい。
h’−a’=d+g・sin(tan-1(f’/e)+θ2)−(b’+c)
…(4)’
【0046】
なお、上式(4)’の値f’は、値fと同様、位置関係検出部32の検出結果から求められる値である。
【0047】
以上のようにすることで、圃場200の未削部分の表面から一定の深さで、圃場200表面を削土し、運搬することが可能となる。
【0048】
以上、詳細に説明したように、本第1の実施形態によると、作業機側制御装置50は、フレーム12の水平面に対する角度を検出する角度検出部30の検出結果に基づいて、フレーム12の角度を水平に維持するように、トラクタ側制御装置99を介して駆動機構96の駆動を制御する。そして、作業機側制御装置50は、フレーム12の角度が水平に維持された状態で、圃場の未削部分に対するフレーム12の高さを検出する高さ検出部34の検出結果(b、b’)と、フレームに対する排土板16の高さ方向の位置関係を検出する位置関係検出部32の検出結果(f、f’)と、に基づいて位置変更機構18を制御する(上式(4)、(4)’参照)。これにより、本第1の実施形態では、レーザレベラやGPSのような高価な機器を利用せずに、圃場表面の土壌を一定の深さで削り、運搬することが可能である。また、位置変更機構18の人手による操作は不要であるため、リヤグレーダのように熟練の技術を要せずに、土壌を一定の深さで削り、運搬することができる。
【0049】
また、本第1の実施形態では、排土板16が、揺動軸22を中心とした揺動により、フレーム12との高さ位置が変更され、作業機側制御装置50は、揺動時の角度(θ1)にも基づいて、位置変更機構18を制御することとしている。これにより、本第1の実施形態では、高精度な排土板16の位置変更が可能となり、ひいては高精度な圃場表面の削土が可能となる。
【0050】
なお、上記第1の実施形態では、角度検出部30、位置関係検出部32、高さ検出部34のそれぞれを、1つずつ設ける場合について説明したが、これに限られるものではない。例えば、各検出部を複数個ずつ設けることとしてもよい。この場合、水平面内において牽引方向に直交する方向に離れた位置に同一種類の検出部を設け、それらの平均値を用いて上記第1の実施形態と同様の処理を行うこととすれば、より高精度に上記作業を行うことができる。特に、高さ検出部34を複数用いることとすれば、圃場表面に凹凸がある場合でも圃場表面の土壌を一定の深さで削る作業を精度良く行うことができる。
【0051】
なお、上記第1の実施形態では、作業機側制御装置50は、排土板16の揺動時の角度(θ1)を考慮して、排土板16の高さ位置を調整する場合について説明したが、これに限られるものではない。例えば、揺動時の角度(θ1)が排土板16の高さ位置の制御に与える影響が小さい場合には、角度θ1を考慮しなくてもよい。この場合、作業機側制御装置50は、例えば、反射板42と排土板16の下端部との高さ方向に関する距離x、位置関係検出部32の検出値から得られるフレーム12上面から反射板42までの距離y、及びフレーム12上面から未削部分までの距離aを用いた値(x+y−a)が一定となるように、位置変更機構18を制御するようにすればよい。
【0052】
なお、上記第1の実施形態では、排土板16を揺動軸22を中心として揺動させることで、排土板16の高さ位置を変更する場合について説明したが、これに限られるものではない。例えば、排土板16を高さ方向に延びるガイドに沿って高さ方向に移動させるようにしてもよい。この場合、上記の値(x+y−a)が一定となるように、位置変更機構18を制御するようにすればよい。
【0053】
なお、上記第1の実施形態では、圃場作業システム100による作業を行う前に、圃場200の土壌表面を掘り起こし、乾燥させ、均しておいてもよい。このようにすることで、圃場作業機10における削土、運搬時の負荷を軽減することができる。また、圃場作業機10の排土板16よりも前側(トラクタ側)に土壌を耕耘し、均すための装置を設けることとしてもよい。
【0054】
なお、上記第1の実施形態では、尾輪14をフレーム12の牽引方向後端部に設け、当該後端部の圃場表面からの高さを所定高さに維持する場合について説明したが、これに限られるものではない。尾輪14は、フレーム12の牽引方向後端部以外の部分に設けることとしてもよい。
【0055】
《第2の実施形態》
次に、第2の実施形態について、図6に基づいて、説明する。本第2の実施形態では、第1の実施形態の構成に加えて、圃場作業機10が、レーザレベラで用いられるレーザ受光器70を備えている点に特徴を有している。
【0056】
レーザ受光器70は、図6に示すように、排土板16に立てられたポール74の上端部近傍に固定されている。なお、ポール74は、排土板16が接続されている揺動体24に立てられてもよい。すなわち、レーザ受光器70は、排土板16に直接的又は間接的に固定されていればよい。また、本第2の実施形態では、圃場200内又は圃場200近傍に、レーザ発光器72が設けられる。なお、従来方式のレーザレベラには、トラクタ直装式とけん引式があるが、本第2の実施形態では、けん引式レベラと同等の構成のレーザレベラを採用することができる。すなわち、レーザコントロール装置はトラクタ90側ではなく、圃場作業機10側に装備することになる。このため、従来のけん引式レベラと同様、レーザ制御機能を装備しないトラクタでも作業が可能となる。
【0057】
本第2の実施形態の作業機側制御装置50では、レーザ発光器72から発光されるレーザの、レーザ受光器70における受光結果が一定となるように、排土板16の高さ位置を位置変更機構18を制御して変更する。このようにすることで、圃場200表面を所定高さに均すことができる。
【0058】
なお、ポール74は、排土板16や揺動体24が水平面に対して傾いた場合でも、ポール74が常に垂直に近い状態となるように維持できる台座に固定されることが好ましい。
【0059】
以上、説明したように、本第2の実施形態によると、上記第1の実施形態の構成に加え、排土板16に直接的又は間接的に固定されたレーザ受光器70を備えており、レーザ受光器70が圃場200又は圃場200近傍に設置されたレーザ発光器72から発光されるレーザを受光したときの受光結果が一定になるように、作業機側制御装置50が、位置変更機構18の制御を行う。このようにすることで、本第2の実施形態では、圃場作業機10を用いた圃場の均平作業が可能となる。
【0060】
また、本第2の実施形態では、フレームをロアリンク94a,94bと尾輪14で支持するため、圃場の凹凸に起因するトラクタのピッチングの影響を比較的受けにくいという効果を奏する。また、本第2の実施形態では、駆動機構96により、フレーム12を水平に維持することができるため、従来のけん引式レベラ以上にトラクタのピッチングの影響を抑制することができる。
【0061】
《第3の実施形態》
次に、第3の実施形態について、図7(a)に基づいて説明する。従来のように、レーザやGPSを使って均平作業を行うためには、作業の前に圃場全体の高低差をくまなく測定し、運土計画を立てることが必要とされている。そこで、本第3の実施形態では、均平作業を行う前の、圃場全体の高低差を測量する作業に、圃場作業システム100を利用する場合について説明する。
【0062】
本第3の実施形態では、図7(a)に示すように、圃場作業機10が、上記第2の実施形態と同様、レーザレベラで用いられるレーザ受光器70を備えているとともに、水平面内位置検出部としてのGPS受信機78を備えている。
【0063】
ここで、GPS受信機78は、圃場作業機10の位置情報を取得するための装置である。GPS受信機78の取り付け位置は、尾輪14の直上付近とする。
【0064】
本第3の実施形態では、排土板16が常に圃場200表面を削土しない高さに位置した状態、すなわち、排土板16が常に圃場200表面から浮いた状態で、レーザ発光器72から発光されるレーザを受光できる位置に、レーザ受光器70をポール74を介して取り付ける。なお、ポール74は、揺動体24に設けられてもよい。すなわち、レーザ受光器70は、排土板16に対して直接的又は間接的に固定されていればよい。
【0065】
そして、作業機側制御装置50は、レーザ受光器70による受光結果が一定となるように、位置変更機構18を介して排土板16の高さ制御を行うとともに、駆動機構96を介してフレーム12上面の水平を維持しつつ、トラクタ90を圃場200内で走行させる。この場合、一定の高さに保たれている排土板16に対し、フレーム12が上下しながら進むということになる。
【0066】
作業機側制御装置50は、上記走行中、位置関係検出部32の検出結果と、GPS受信機78の検出結果(緯度、経度)を取得する。この場合において位置関係検出部32から得られる、フレーム12に対する排土板16の相対位置の値(高さ方向に関する距離)は、圃場200表面の高さを表す。したがって、作業機側制御装置50は、位置関係検出部32から得られる圃場200表面の高さと、当該表面の高さが得られた時点におけるGPS受信機78の検出結果(緯度、経度)を関連付けて記録することで、圃場200の高低差マップの作成(測量)を行うことが可能となる。
【0067】
なお、本第3の実施形態においても、上記第2の実施形態と同様、ポール74は、排土板16や揺動体24が水平面に対して傾いた場合でも、ポール74が常に垂直に近い状態となるように維持できる台座に固定されることが好ましい。
【0068】
以上、説明したように、本第3の実施形態によると、レーザ受光器70が、排土板16が圃場200に接触しない状態で、レーザ発光器72から発光されるレーザを受光するように排土板16に直接的又は間接的に固定されており、作業機側制御装置50は、角度検出部30の検出結果に基づいて、フレーム12の角度を水平に維持するように駆動機構96を制御するとともに、レーザ受光器70の受光結果が一定になるように位置変更機構18を介して排土板16の高さ方向の位置を変更し、当該変更の間における、位置関係検出部の検出結果とGPS受信機78の検出結果(圃場200内における尾輪14の水平面内の位置)とに基づいて、圃場200の測量を行う。これにより、本第3の実施形態では、簡易な方法で、圃場200の測量を行うことが可能となる。ここで、従来は、例えば、図7(b)の比較例の図に示すように測量用の受光器170を用い、レーザ発光器72による基準平面からの標高差を測定する方法や、トラクタに高さ情報の取得が可能なGPS受信装置を取り付けて圃場をくまなく走行し、GPSの高さ情報、緯度、経度情報を取得する方法などがあった。しかし、図7(b)のような方法では、多くの時間と労力が必要である。また、高さ情報の取得が可能なGPS受信装置をトラクタに取り付ける方法では、トラクタの自重により車輪が沈んだ場合は正確に測量ができず、更に、高さ情報取得精度がGPS受信装置の測定精度に依存するおそれがあった。これに対し、本第3の実施形態では、トラクタを圃場内で走行させている間に測量ができるため、時間の短縮及び労力の軽減が可能となる。また、本第3の実施形態では、トラクタの自重による影響がなく、また、高さ情報の取得に、高さ情報を高精度に取得するための高価なGPS装置を用いる必要が無い。
【0069】
なお、上記第2の実施形態を用いて、圃場200の均平作業を行った後に、上記第3の実施形態を用いて、圃場200の測量作業を行うこととしてもよい。この場合、測量結果を用いることで、圃場の均平作業が完了したか否かを判断することが可能となる。
【0070】
なお、上記各実施形態では、作業地が圃場200である場合について説明したが、これに限られるものではない。作業地は、圃場以外の領域(例えば、学校の校庭や砂浜、宅地など)であってもよい。
【0071】
上述した実施形態は本発明の好適な実施の例である。但し、これに限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変形実施可能である。
【符号の説明】
【0072】
10 圃場作業機(作業機)
12 フレーム
14 尾輪
16 排土板
18 位置変更機構
22 揺動軸(回転軸)
30 角度検出部
32 位置関係検出部
34 高さ検出部
50 作業機側制御装置(制御部)
70 レーザ受光器
72 レーザ発光器
78 GPS受信機(水平面内位置検出部)
90 トラクタ(牽引装置)
100 圃場作業システム(作業システム)
200 圃場(作業地)
【特許請求の範囲】
【請求項1】
牽引装置に牽引された状態で作業地を移動する作業機であって、
前記牽引装置に接続され、前記牽引装置が有する駆動機構により前記接続部分の高さ位置が変更可能とされたフレームと、
前記フレームの一部を前記作業地表面から所定高さの位置で支持する尾輪と、
前記作業地表面の土壌を削り、運搬する排土板と、
前記フレームに対する前記排土板の高さ方向の位置を変更する位置変更機構と、
前記フレームの水平面に対する角度を検出する角度検出部と、
前記排土板よりも前記牽引装置側の前記作業地表面に対する前記フレームの高さを検出する高さ検出部と、
前記フレームに対する前記排土板の高さ方向の位置関係を検出する位置関係検出部と、
前記角度検出部の検出結果に基づいて、前記フレームの角度を水平に維持するように前記駆動機構を制御するとともに、前記フレームの角度が水平に維持された状態での前記高さ検出部と前記位置関係検出部の検出結果に基づいて、前記位置変更機構を制御する制御部と、
を備える作業機。
【請求項2】
前記位置変更機構には、前記フレームに設けられた水平方向に延びる回転軸を中心として前記排土板を揺動することで、前記排土板の前記フレームに対する高さ位置を変更し、
前記制御部は、前記揺動の角度に基づいて前記位置変更機構を制御することを特徴とする請求項1に記載の作業機。
【請求項3】
前記排土板に直接的又は間接的に固定され、前記作業地又は前記作業地近傍に設置されたレーザ発光器から発光されるレーザを受光可能なレーザ受光器を更に備え、
前記制御部は、前記レーザ受光器の受光結果が一定になるように、前記位置変更機構の制御を行うことを特徴とする請求項1又は2に記載の作業機。
【請求項4】
前記排土板が前記作業地に接触しない状態で、前記作業地又は前記作業地近傍に設置されたレーザ発光器から発光されるレーザを受光するように前記排土板に直接的又は間接的に固定されたレーザ受光器と、
前記作業地内における前記尾輪の水平面内の位置を検出する水平面内位置検出部と、を更に備え、
前記制御部は、前記角度検出部の検出結果に基づいて、前記フレームの角度を水平に維持するように前記駆動機構を制御するとともに、前記レーザ受光器の受光結果が一定になるように前記位置変更機構を介して前記排土板の高さ方向の位置を変更し、当該変更の間における、前記位置関係検出部の検出結果と前記水平面内位置検出部の検出結果とに基づいて、前記作業地の測量を行うことを特徴とする請求項1又は2に記載の作業機。
【請求項5】
牽引装置と、
前記牽引装置に牽引された状態で作業地を移動する請求項1〜4のいずれか一項に記載の作業機と、を備える作業システム。
【請求項1】
牽引装置に牽引された状態で作業地を移動する作業機であって、
前記牽引装置に接続され、前記牽引装置が有する駆動機構により前記接続部分の高さ位置が変更可能とされたフレームと、
前記フレームの一部を前記作業地表面から所定高さの位置で支持する尾輪と、
前記作業地表面の土壌を削り、運搬する排土板と、
前記フレームに対する前記排土板の高さ方向の位置を変更する位置変更機構と、
前記フレームの水平面に対する角度を検出する角度検出部と、
前記排土板よりも前記牽引装置側の前記作業地表面に対する前記フレームの高さを検出する高さ検出部と、
前記フレームに対する前記排土板の高さ方向の位置関係を検出する位置関係検出部と、
前記角度検出部の検出結果に基づいて、前記フレームの角度を水平に維持するように前記駆動機構を制御するとともに、前記フレームの角度が水平に維持された状態での前記高さ検出部と前記位置関係検出部の検出結果に基づいて、前記位置変更機構を制御する制御部と、
を備える作業機。
【請求項2】
前記位置変更機構には、前記フレームに設けられた水平方向に延びる回転軸を中心として前記排土板を揺動することで、前記排土板の前記フレームに対する高さ位置を変更し、
前記制御部は、前記揺動の角度に基づいて前記位置変更機構を制御することを特徴とする請求項1に記載の作業機。
【請求項3】
前記排土板に直接的又は間接的に固定され、前記作業地又は前記作業地近傍に設置されたレーザ発光器から発光されるレーザを受光可能なレーザ受光器を更に備え、
前記制御部は、前記レーザ受光器の受光結果が一定になるように、前記位置変更機構の制御を行うことを特徴とする請求項1又は2に記載の作業機。
【請求項4】
前記排土板が前記作業地に接触しない状態で、前記作業地又は前記作業地近傍に設置されたレーザ発光器から発光されるレーザを受光するように前記排土板に直接的又は間接的に固定されたレーザ受光器と、
前記作業地内における前記尾輪の水平面内の位置を検出する水平面内位置検出部と、を更に備え、
前記制御部は、前記角度検出部の検出結果に基づいて、前記フレームの角度を水平に維持するように前記駆動機構を制御するとともに、前記レーザ受光器の受光結果が一定になるように前記位置変更機構を介して前記排土板の高さ方向の位置を変更し、当該変更の間における、前記位置関係検出部の検出結果と前記水平面内位置検出部の検出結果とに基づいて、前記作業地の測量を行うことを特徴とする請求項1又は2に記載の作業機。
【請求項5】
牽引装置と、
前記牽引装置に牽引された状態で作業地を移動する請求項1〜4のいずれか一項に記載の作業機と、を備える作業システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−66452(P2013−66452A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−209317(P2011−209317)
【出願日】平成23年9月26日(2011.9.26)
【出願人】(501203344)独立行政法人農業・食品産業技術総合研究機構 (827)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月26日(2011.9.26)
【出願人】(501203344)独立行政法人農業・食品産業技術総合研究機構 (827)
【Fターム(参考)】
[ Back to top ]