
作業機械の操作装置
【課題】作業中の負荷情報をオペレータに正確に、かつ、レバー操作の邪魔にならないように伝達する。
【解決手段】アクチュエータを操作する操作レバー1のノブ3にスライダー18を、水平方向にスライドしてノブ外周からの突出量が増減する状態で設ける。一方、作業中の負荷を検出する各センサ6〜10からの信号に基づいてコントローラ12で負荷を演算し、この負荷に応じてスライダー18を外向きにスライドさせることによりノブ3の外形を変形させ、この変形を負荷情報として、手の触覚を通じてオペレータに伝達するようにした。
【解決手段】アクチュエータを操作する操作レバー1のノブ3にスライダー18を、水平方向にスライドしてノブ外周からの突出量が増減する状態で設ける。一方、作業中の負荷を検出する各センサ6〜10からの信号に基づいてコントローラ12で負荷を演算し、この負荷に応じてスライダー18を外向きにスライドさせることによりノブ3の外形を変形させ、この変形を負荷情報として、手の触覚を通じてオペレータに伝達するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は油圧ショベルの作業機械において負荷情報をオペレータに伝える機能を持った操作装置に関するものである。
【背景技術】
【0002】
たとえば油圧ショベルは、クローラ式の下部走行体上に縦軸まわりに旋回自在な上部旋回体を搭載し、この上部旋回体にブーム、アーム、バケットを備えた作業アタッチメントを装着して構成される。
【0003】
この油圧ショベルには、走行、旋回、ブーム、アーム、バケットの各動作を行うためのアクチュエータ(油圧アクチュエータまたは電動アクチュエータ。以下、一般的な油圧アクチュエータの場合で説明する)と、この各アクチュエータの油圧源としての油圧ポンプと、各アクチュエータの作動を制御するコントロールバルブと、このコントロールバルブを操作する操作装置とが設けられている。
【0004】
操作装置は、たとえば油圧パイロット式のコントロールバルブが用いられる場合(以下、この場合で説明する)はリモコン弁とこれを操作する操作レバーとによって構成され、操作レバーの操作量に応じてコントロールバルブの位置と開度が制御され、アクチュエータの作動方向と速度が制御される。
【0005】
操作レバーは、一般的には、中立点を挟んだ前後または左右の1自由度で操作されて一つのアクチュエータを正逆作動させる標準型と、前後と左右の2自由度で操作されて二つのアクチュエータを選択作動させる十字型の二種類が用いられ、この操作レバーの操作により対応するアクチュエータが操作方向と操作量に応じた方向と速度で作動して掘削、積み込みその他の作業が行われる。
【0006】
ここで、操作レバーの操作による作業時に、機械の姿勢や作業対象の位置、姿勢、状態、操作量等の種々の要因によってアクチュエータの負荷が変化する。
【0007】
このとき、オペレータは機械の動きや振動、音等を負荷情報として感知し、この負荷情報に基づき操作量を修正するなど操作に反映させることで過負荷の発生や進行を防いだり、作業の効率化を図ったりする。
【0008】
しかし、負荷情報を正確に把握することは、作業の種類や現場の状況等によっては困難な場合があるし、オペレータの熟練度によってばらつきがある。
【0009】
そこで、特許文献1に示されるように、操作レバーのノブに振動発生装置を組み込み、作業中、検出される負荷に応じて操作レバーを振動させることにより、同レバーを持った手を通じて負荷情報をオペレータに伝達する技術が提案されている。
【特許文献1】特開平10−11111号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
しかし、油圧ショベル等の作業機械では、作業中、機械自身が激しく振動するため、操作レバーを振動させる公知技術では、この機械の振動と操作レバーの振動の区別がつき難く、この点で負荷情報伝達効果が低くなる。
【0011】
また、操作レバーの操作時、とくにインチング作業等を行う微操作時に、レバー振動がオペレータの細かな操作を妨げるという弊害が生じる。
【0012】
そこで本発明は、負荷情報をオペレータに正確に、かつ、レバー操作の邪魔にならないように伝達することができる作業機械の操作装置を提供するものである。
【課題を解決するための手段】
【0013】
請求項1の発明は、操作レバーの操作によりアクチュエータを作動させて作業を行う作業機械の操作装置において、アクチュエータ作動時の負荷を検出する負荷検出手段と、検出される負荷に基づいて変形指令を出力する制御手段と、この制御手段からの変形指令に基づいて操作レバーの少なくとも一部を変形させて負荷情報をオペレータに伝達する負荷情報伝達手段とを具備するものである。
【0014】
請求項2の発明は、請求項1の構成において、操作レバーの中立点を挟んだ一方向両側への操作によって一つのアクチュエータを正逆作動させるように構成され、負荷情報伝達手段は、操作レバーの両側操作ごとに負荷情報を伝達するように構成されたものである。
【0015】
請求項3の発明は、請求項1または2の構成において、一つの操作レバーで複数のアクチュエータを選択作動させるように構成され、負荷情報伝達手段は、アクチュエータごとに負荷情報を伝達するように構成されたものである。
【0016】
請求項4の発明は、請求項1〜3のいずれかの構成において、負荷情報伝達手段は、操作レバーの少なくとも一部を、検出される負荷の大きさに応じた量で変形させるように構成されたものである。
【0017】
請求項5の発明は、請求項1〜4のいずれかの構成において、オペレータが把持する操作レバーのノブを変形させるように構成されたものである。
【0018】
請求項6の発明は、請求項5の構成において、負荷情報伝達手段は、操作レバーのノブに移動可能に設けられ変位体と、制御手段からの変形指令に基づいてこの変位体を移動させる変位駆動部とを備え、変位体の移動によるノブの変形により負荷情報を伝達するように構成されたものである。
【0019】
請求項7の発明は、請求項6の構成において、操作レバーのノブに、水平方向にスライドしてノブ外周からの突出量が増減する状態で変位体としてのスライダーが設けられ、このスライダーを外向きに押圧する変位駆動部としてのリンク部材がスライダーと対向してノブ内に設けられて負荷情報伝達手段が構成されたものである。
【0020】
請求項8の発明は、請求項7の構成において、スライダーとリンク部材の相対向する面の一方に上下方向の傾斜面、他方に回転自在なローラが設けられ、上記傾斜面に対するローラの転動作用によってスライダーを水平方向にスライドさせるように構成されたものである。
【0021】
請求項9の発明は、請求項5の構成において、負荷情報伝達手段は、外部からの給気及び排気作用により拡縮してノブ外周からの突出量が増減する状態でノブに設けられたバルーンと、このバルーンに対する給排気作用を行う給排気手段とを有するものである。
【0022】
請求項10の発明は、請求項1〜9のいずれかの構成において、制御手段は、負荷が一定値以上の場合を含む異常事態の発生を判定するように構成され、異常発生時に異常事態が進行する方向の操作レバーの操作を制限する操作制限手段が設けられたものである。
【0023】
請求項11の発明は、請求項10の構成において、水平軸を中心として前後または左右に回動操作される操作レバーに、上下動可能なストッパ軸が、異常発生時に下方移動して操作レバーの操作を制限する状態で設けられて操作制限手段が構成されたものである。
【発明の効果】
【0024】
本発明によると、作業時に、操作レバーの少なくとも一部(請求項5〜9ではノブ)を、検出される負荷に基づいて変形させることにより負荷情報をオペレータに伝達する構成としたから、負荷情報を、レバー振動式のように機械の振動に紛れることなく正確に伝達することができる。
【0025】
しかも、操作レバーの少なくとも一部を変形させることによって負荷情報を伝達するため、レバー振動式のようにとくに微操作時にオペレータのレバー操作の妨げとなるおそれがない。
【0026】
この場合、請求項2の発明では操作レバーの中立点を挟んだ一方向両側の操作ごとに、請求項3の発明では一つの操作レバーで複数のアクチュエータを操作する場合におけるアクチュエータごとにそれぞれ負荷情報を伝達するため、操作方向またはアクチュエータの区別をしないで単にレバーを振動させる公知技術と比べて、負荷情報を一層正確にオペレータに伝達し、修正等の操作に的確に反映させることができる。
【0027】
請求項4の発明によると、操作レバーの少なくとも一部を負荷の大きさに応じた量(負荷に比例した量、あるいは比例ではないが負荷に応じて増減する量)で変形させるため、負荷情報をさらに正確にかつ迫真性をもって伝達することができる。
【0028】
請求項5〜9の発明によると、オペレータが把持するノブを変形させる(請求項6〜8の発明ではノブに設けた変位体の移動によって変形させ、請求項9の発明ではバルーンの拡縮によって変形させる)ことにより、オペレータの触覚を通じて操作レバーの変形を認識させる構成としたから、視覚を通じて操作レバーの変形を認識させる場合と比べて、より確実な負荷情報伝達効果を得ることができる。
【0029】
一方、請求項10,11の発明によると、負荷が一定値以上の場合を含む異常事態の発生時に、操作制限手段(請求項11の発明ではストッパ軸)により、異常事態が進行する方向の操作レバーの操作を制限する構成としたから、異常事態の進行を止めるとともに異常事態発生をオペレータに明確に認識させ、危険事態を速やかにかつ確実に回避することができる。
【0030】
また、負荷情報と異常事態発生をともに操作レバーを通じてオペレータに伝達することから、オペレータは注意を操作レバーのみに集中すればよいため、オペレータの負担を軽減することができる。
【発明を実施するための最良の形態】
【0031】
第1実施形態(図1〜図5参照)
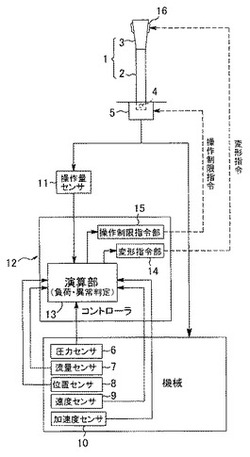
図1にこの操作装置の全体構成を示す。
【0032】
ここでは、操作レバー1を一自由度(たとえば前後方向)で回動させて図示しないリモコン弁を操作し、このリモコン弁からのパイロット圧を図示しない油圧パイロット式コントロールバルブに送って同バルブの位置と開度を制御する場合を例にとっている。
【0033】
操作レバー1は、レバーシャフト2の上端部に逆円錐台形のノブ3が設けられて成り、レバーシャフト2の下端部がレバー軸4によってフロアプレート等の機械固定部分に回動可能に取付けられている。5は後述する操作制限機構(請求項10,11の操作制限手段)である。
【0034】
機械の負荷情報を収集するためのセンサとして、たとえばアクチュエータ(またはポンプ)の圧力を検出する圧力センサ6、アクチュエータ流量(またはポンプ流量)を検出する流量センサ7、ブーム、アーム、バケット等の機械各部の位置を検出する位置センサ8、アクチュエータ(またはアタッチメント)の作動速度を検出する速度センサ9、同加速度を検出する加速度センサ10、それに操作レバー1の操作量を検出する操作量センサ11が設けられ、各センサ6〜11からの信号(検出された各情報)が制御手段としてのコントローラ12に入力される。
【0035】
コントローラ12は、演算部13、変形指令部14、操作制限指令部15を有する。
【0036】
演算部13は、各センサ信号に基づいてそのときの負荷を演算するとともに、この負荷が一定値以上(所謂過負荷)の場合のほか、速度または加速度が設定値を超える場合等、異常事態か否かを判定する。
【0037】
変形指令部14は、演算部13で演算された負荷に応じた変形指令を操作レバー1の負荷情報伝達手段16に送る。
【0038】
一方、操作制限指令部15は、異常事態と判定したときに、異常が進行する方向の操作レバー1の操作を制限する指令を入力制限機構5に送る(後に詳述する)。
【0039】
負荷情報伝達手段16の構成を図2〜図5によって説明する。
【0040】
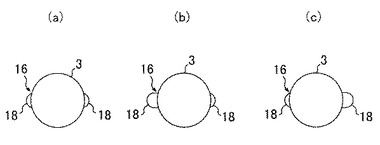
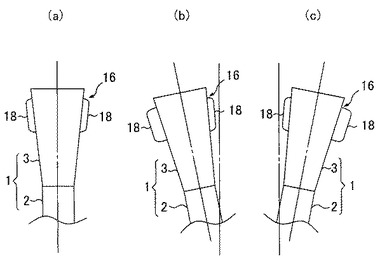
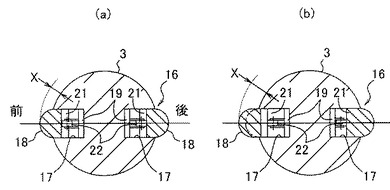
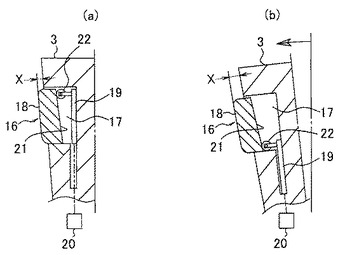
図2(a)〜(c)は操作レバー1を上から見た平面図、図3(a)〜(c)は同正面図である。また、図4(a)(b)は図2(a)(b)の状態の拡大水平断面図、図5(a)(b)は図4(a)(b)の状態の部分側断面図である。
【0041】
操作レバー1のノブ3の前後両側(図の方向性では左右両側)に凹溝17,17がノブ外周に開口する状態で設けられ、変位体としてのスライダー18,18が、水平方向にスライドしてノブ外周からの突出量Xが増減する状態でこの凹溝17,17に設けられている。
【0042】
一方、このスライダー18,18を外向きに押圧する変位駆動部としてのリンク部材19,19が、スライダー18,18と対向して、かつ、上下動自在な状態で凹溝17,17内に設けられている。
【0043】
このリンク部材19,19は、リンク部材駆動機構(図5中に簡略化して示す)20によって上下に駆動される。
【0044】
リンク部材駆動機構20としては、たとえば電磁石や小型シリンダを駆動源としてワイヤ、復帰バネでリンク部材19を駆動する機構等を用いることができる。
【0045】
スライダー18,18には、リンク部材19,19と対向する内側面に上下方向の傾斜面21,21、リンク部材19,19には、スライダー18,18と対向する面の上端部に回転自在なローラ22,22がそれぞれ設けられ、リンク部材19,19の上下移動時にローラ22,22が傾斜面21,21上を転動し、この傾斜面21,21に対するローラ22,22の転動作用により、スライダー18,18が水平移動してノブ外周からの突出量Xが増減変化するように構成されている。
【0046】
この点の作用を詳述する。
【0047】
操作レバー1がたとえば前方(図2〜図5の左側)に操作された状態で、図1に示すコントローラ12の演算部13によって負荷が演算され、変形指令部14から前側のリンク部材駆動機構20に負荷に応じた量(負荷に比例した量、または比例ではないが負荷に応じて増減する量)の変形指令が送られる。
【0048】
この指令に基づくリンク部材駆動機構20の作動により、リンク部材19が図5(a)に示す上昇位置から同図(b)に示すように負荷に応じた量だけ(図例では最大量)下降移動し、これに伴う傾斜面21に対するローラ22の転動作用により前側スライダー18が外向きに水平移動してノブ外周からの突出量Xが増加する。
【0049】
この作用は、操作レバー1が後方(図2〜図5の右側)に操作された場合も同様に働き、上記のようにスライダー18の突出量Xが増加すること、すなわち、ノブ3の外形が変形することにより、負荷情報がノブ3を把持した手を通じてオペレータに伝達される。
【0050】
この構成によると、負荷情報を、公知技術のレバー振動式のように機械の振動に紛れることなく正確に伝達することができる。
【0051】
しかも、操作レバー1の一部であるノブ3を変形させることによって負荷情報を伝達するため、レバー振動式のようにとくに微操作時にオペレータのレバー操作の妨げとなるおそれがない。
【0052】
この場合、操作レバー1の中立点を挟んだ一方向両側(前後両側)の操作ごとに負荷情報を伝達するため、操作方向の区別をしないで単にレバー1を振動させる公知技術と比べて、負荷情報を一層正確にオペレータに伝達し、修正等の操作に的確に反映させることができる。
【0053】
しかも、操作レバー1のノブ3を負荷の大きさに応じた量で変形させるため、負荷情報をさらに正確にかつ迫真性をもって伝達することができる。
【0054】
また、オペレータが把持するノブ3を変形させることにより、オペレータの触覚を通じて操作レバー1の変形を認識させるため、ノブ3以外のレバー部分の変形を視覚を通じてオペレータに認識させる場合と比べて、より確実な負荷情報伝達効果を得ることができる。
【0055】
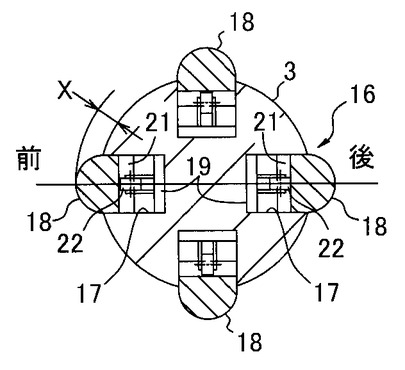
なお、図6は、たとえば前後操作でブームの上げ、下げ、左右操作でバケットの掘削、排土動作を行わせる十字型の操作レバーに適用した場合を示す。
【0056】
この十字型の操作レバーの場合には、ノブ3の前後、左右のニ方向両側にスライダー18、リンク部材19、リンク部材駆動機構20を設けて負荷情報伝達手段16を構成すればよい。
【0057】
この場合、二つのアクチュエータ(上記例ではブームシリンダとバケットシリンダ)ごとに負荷情報を伝達することができる。このため、アクチュエータの区別をしないで単にレバーを振動させる公知技術と比べて、負荷情報を一層正確にオペレータに伝達し、修正等の操作に的確に反映させることができる。
【0058】
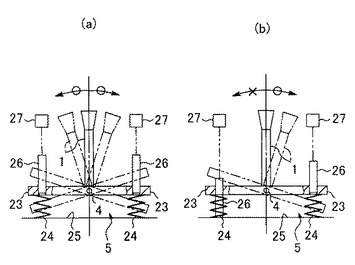
図7は、操作制限機構5の構成を示す。
【0059】
レバー軸4によって回転自在に支持されたレバーシャフト2の下端部前後両側にアーム23,23が水平に張り出され、このアーム23,23がそれぞれバネ24,24によって支持され、かつ、中立方向に付勢されている。25はバネ受け面である。
【0060】
この両バネ24,24に臨んで両アーム23,23に垂直なストッパ軸26,26が上下動可能に設けられ、このストッパ軸26,26がストッパ軸駆動部(たとえば電磁石とワイヤの組み合わせや小型シリンダ)27,27によって上下動するように構成されている。
【0061】
図7(a)は両ストッパ軸26,26がともに上昇位置にあってストッパ機能が働かず、操作レバー1を自由に操作できる状態を示す。
【0062】
この構成において、たとえば操作レバー1を前方に操作した状態で一定値以上の負荷がかかったり、アクチュエータ速度が一定値を超えたりする等の異常事態が発生すると、図1のコントローラ12の操作制限指令部15から操作制限機構5(正確にはストッパ軸駆動部27)に操作制限指令が送られる。
【0063】
これを受けて操作制限機構5が作動、すなわち、図7(b)に示すように前側ストッパ軸26が下降してバネ受け面25に当接する。これにより、操作レバー1の前方操作が制限される。
【0064】
図7(a)(b)中の○は操作制限されていないこと、×は操作制限されていることをそれぞれ示す。
【0065】
なお、図ではストッパ軸26が最大量下降して操作レバー1の前方操作が一切禁止される状態を示しているが、異常の度合いに応じてストッパ軸26の下降量を調整するようにしてもよい。
【0066】
この作用により、異常事態の進行を止めるとともに異常事態発生をオペレータに明確に認識させ、危険事態を速やかにかつ確実に回避することができる。
【0067】
この場合、反対側への操作は許容されるため、この反対側操作によって異常事態を速やかに解消することができる。
【0068】
また、負荷情報と異常事態発生をともに操作レバー1を通じてオペレータに伝達することから、オペレータは注意を操作レバーのみに集中すればよいため、オペレータの負担を軽減することができる。
【0069】
第2実施形態(図8参照)
第1実施形態との相違点のみを説明する。
【0070】
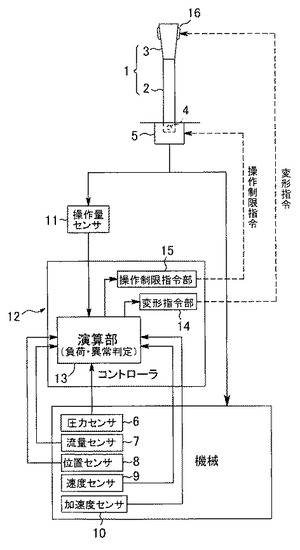
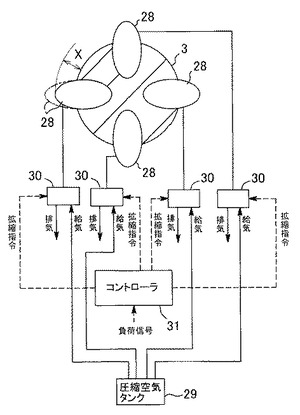
第2実施形態においては、外部からの給気及び排気作用により拡縮してノブ外周からの突出量Xが増減する状態でノブ3に設けられたバルーン28と、このバルーン28に対する給排気作用を行う給排気手段としての圧縮空気タンク29及び給排気弁30とによって負荷情報伝達手段が構成されている。
【0071】
ここでは十字型操作レバーに対応して前後両側と左右両側に計4個のバルーン28と給排気弁30が設けられた場合を示す。
【0072】
給排気弁30…は、負荷に応じたコントローラ31からの拡縮指令に基づいて位置(給気位置と排気位置)と開度が制御され、これによりバルーン28…が拡縮してノブ外周からの突出量Xが増減変化する。図8には、前側バルーン28が拡張した状態を二点鎖線で示す。
【0073】
この第2実施形態によっても、第1実施形態と同様に、負荷情報をオペレータに正確に、かつ、オペレータの操作を妨げることなく伝達するという効果を得ることができる。
【0074】
他の実施形態
(1)上記実施形態では、前方操作に対しては前側のスライダー18またはバルーン28を作動させる構成としたが、操作方向と、作動するスライダー18またはバルーン28の関係を逆にしてもよい。
【0075】
すなわち、たとえば操作レバー1を前方に操作する場合、オペレータはレバー前面には触れずに後面側を押し、逆に後方操作時に後面には触れずに前面に手を添えて引くことがある。
【0076】
そこで、前方操作時には後側の、後方操作時には前側のそれぞれスライダー18またはバルーン28を作動させるようにしてもよい。
【0077】
(2)負荷情報伝達の方式として、第1実施形態のスライダー方式、第2実施形態のバルーン方式に代えて他の方式、たとえばノブ上面にピンを上下動可能に設け、このピンの突出量を増減させる(ノブ外形を変形させる)ことにより、視覚を通じて負荷情報を伝達する方式等を採用することができる。
【図面の簡単な説明】
【0078】
【図1】本発明の第1実施形態に係る操作装置の全体構成図である。
【図2】(a)(b)(c)は負荷情報伝達手段を設けた操作レバーの概略平面図である。
【図3】(a)(b)(c)は同レバーの概略側面図である。
【図4】(a)(b)は同レバーの拡大水平断面図である。
【図5】(a)(b)は同部分側断面図である。
【図6】操作レバーの前後、左右に負荷情報伝達手段を設けた場合の図4相当図である。
【図7】(a)(b)は操作制限機構付きの操作レバーの概略側面図である。
【図8】本発明の第2実施形態に係る操作装置の全体構成図である。
【符号の説明】
【0079】
1 操作レバー
2 レバーシャフト
3 ノブ
4 レバー軸
5 操作制限機構(操作制限手段)
6 負荷検出手段としての圧力センサ
7 同流量センサ
8 同位置センサ
9 同速度センサ
10 同加速度センサ
11 同操作量センサ
12 コントローラ(制御手段)
13 演算部
14 変形指令部
15 操作制限指令部
16 負荷情報伝達手段
17 凹溝
18 変位体としてのスライダー
19 変位駆動部としてのリンク部材
20 リンク部材駆動機構
21 傾斜面
22 ローラ
X スライダーのノブ外周からの突出量
23 操作制限機構のアーム
24 同バネ
26 同ストッパ軸
27 同ストッパ軸駆動部
28 負荷情報伝達手段を構成するバルーン
29 同圧縮空気タンク
30 同給排気弁
31 コントローラ(制御手段)
【技術分野】
【0001】
本発明は油圧ショベルの作業機械において負荷情報をオペレータに伝える機能を持った操作装置に関するものである。
【背景技術】
【0002】
たとえば油圧ショベルは、クローラ式の下部走行体上に縦軸まわりに旋回自在な上部旋回体を搭載し、この上部旋回体にブーム、アーム、バケットを備えた作業アタッチメントを装着して構成される。
【0003】
この油圧ショベルには、走行、旋回、ブーム、アーム、バケットの各動作を行うためのアクチュエータ(油圧アクチュエータまたは電動アクチュエータ。以下、一般的な油圧アクチュエータの場合で説明する)と、この各アクチュエータの油圧源としての油圧ポンプと、各アクチュエータの作動を制御するコントロールバルブと、このコントロールバルブを操作する操作装置とが設けられている。
【0004】
操作装置は、たとえば油圧パイロット式のコントロールバルブが用いられる場合(以下、この場合で説明する)はリモコン弁とこれを操作する操作レバーとによって構成され、操作レバーの操作量に応じてコントロールバルブの位置と開度が制御され、アクチュエータの作動方向と速度が制御される。
【0005】
操作レバーは、一般的には、中立点を挟んだ前後または左右の1自由度で操作されて一つのアクチュエータを正逆作動させる標準型と、前後と左右の2自由度で操作されて二つのアクチュエータを選択作動させる十字型の二種類が用いられ、この操作レバーの操作により対応するアクチュエータが操作方向と操作量に応じた方向と速度で作動して掘削、積み込みその他の作業が行われる。
【0006】
ここで、操作レバーの操作による作業時に、機械の姿勢や作業対象の位置、姿勢、状態、操作量等の種々の要因によってアクチュエータの負荷が変化する。
【0007】
このとき、オペレータは機械の動きや振動、音等を負荷情報として感知し、この負荷情報に基づき操作量を修正するなど操作に反映させることで過負荷の発生や進行を防いだり、作業の効率化を図ったりする。
【0008】
しかし、負荷情報を正確に把握することは、作業の種類や現場の状況等によっては困難な場合があるし、オペレータの熟練度によってばらつきがある。
【0009】
そこで、特許文献1に示されるように、操作レバーのノブに振動発生装置を組み込み、作業中、検出される負荷に応じて操作レバーを振動させることにより、同レバーを持った手を通じて負荷情報をオペレータに伝達する技術が提案されている。
【特許文献1】特開平10−11111号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
しかし、油圧ショベル等の作業機械では、作業中、機械自身が激しく振動するため、操作レバーを振動させる公知技術では、この機械の振動と操作レバーの振動の区別がつき難く、この点で負荷情報伝達効果が低くなる。
【0011】
また、操作レバーの操作時、とくにインチング作業等を行う微操作時に、レバー振動がオペレータの細かな操作を妨げるという弊害が生じる。
【0012】
そこで本発明は、負荷情報をオペレータに正確に、かつ、レバー操作の邪魔にならないように伝達することができる作業機械の操作装置を提供するものである。
【課題を解決するための手段】
【0013】
請求項1の発明は、操作レバーの操作によりアクチュエータを作動させて作業を行う作業機械の操作装置において、アクチュエータ作動時の負荷を検出する負荷検出手段と、検出される負荷に基づいて変形指令を出力する制御手段と、この制御手段からの変形指令に基づいて操作レバーの少なくとも一部を変形させて負荷情報をオペレータに伝達する負荷情報伝達手段とを具備するものである。
【0014】
請求項2の発明は、請求項1の構成において、操作レバーの中立点を挟んだ一方向両側への操作によって一つのアクチュエータを正逆作動させるように構成され、負荷情報伝達手段は、操作レバーの両側操作ごとに負荷情報を伝達するように構成されたものである。
【0015】
請求項3の発明は、請求項1または2の構成において、一つの操作レバーで複数のアクチュエータを選択作動させるように構成され、負荷情報伝達手段は、アクチュエータごとに負荷情報を伝達するように構成されたものである。
【0016】
請求項4の発明は、請求項1〜3のいずれかの構成において、負荷情報伝達手段は、操作レバーの少なくとも一部を、検出される負荷の大きさに応じた量で変形させるように構成されたものである。
【0017】
請求項5の発明は、請求項1〜4のいずれかの構成において、オペレータが把持する操作レバーのノブを変形させるように構成されたものである。
【0018】
請求項6の発明は、請求項5の構成において、負荷情報伝達手段は、操作レバーのノブに移動可能に設けられ変位体と、制御手段からの変形指令に基づいてこの変位体を移動させる変位駆動部とを備え、変位体の移動によるノブの変形により負荷情報を伝達するように構成されたものである。
【0019】
請求項7の発明は、請求項6の構成において、操作レバーのノブに、水平方向にスライドしてノブ外周からの突出量が増減する状態で変位体としてのスライダーが設けられ、このスライダーを外向きに押圧する変位駆動部としてのリンク部材がスライダーと対向してノブ内に設けられて負荷情報伝達手段が構成されたものである。
【0020】
請求項8の発明は、請求項7の構成において、スライダーとリンク部材の相対向する面の一方に上下方向の傾斜面、他方に回転自在なローラが設けられ、上記傾斜面に対するローラの転動作用によってスライダーを水平方向にスライドさせるように構成されたものである。
【0021】
請求項9の発明は、請求項5の構成において、負荷情報伝達手段は、外部からの給気及び排気作用により拡縮してノブ外周からの突出量が増減する状態でノブに設けられたバルーンと、このバルーンに対する給排気作用を行う給排気手段とを有するものである。
【0022】
請求項10の発明は、請求項1〜9のいずれかの構成において、制御手段は、負荷が一定値以上の場合を含む異常事態の発生を判定するように構成され、異常発生時に異常事態が進行する方向の操作レバーの操作を制限する操作制限手段が設けられたものである。
【0023】
請求項11の発明は、請求項10の構成において、水平軸を中心として前後または左右に回動操作される操作レバーに、上下動可能なストッパ軸が、異常発生時に下方移動して操作レバーの操作を制限する状態で設けられて操作制限手段が構成されたものである。
【発明の効果】
【0024】
本発明によると、作業時に、操作レバーの少なくとも一部(請求項5〜9ではノブ)を、検出される負荷に基づいて変形させることにより負荷情報をオペレータに伝達する構成としたから、負荷情報を、レバー振動式のように機械の振動に紛れることなく正確に伝達することができる。
【0025】
しかも、操作レバーの少なくとも一部を変形させることによって負荷情報を伝達するため、レバー振動式のようにとくに微操作時にオペレータのレバー操作の妨げとなるおそれがない。
【0026】
この場合、請求項2の発明では操作レバーの中立点を挟んだ一方向両側の操作ごとに、請求項3の発明では一つの操作レバーで複数のアクチュエータを操作する場合におけるアクチュエータごとにそれぞれ負荷情報を伝達するため、操作方向またはアクチュエータの区別をしないで単にレバーを振動させる公知技術と比べて、負荷情報を一層正確にオペレータに伝達し、修正等の操作に的確に反映させることができる。
【0027】
請求項4の発明によると、操作レバーの少なくとも一部を負荷の大きさに応じた量(負荷に比例した量、あるいは比例ではないが負荷に応じて増減する量)で変形させるため、負荷情報をさらに正確にかつ迫真性をもって伝達することができる。
【0028】
請求項5〜9の発明によると、オペレータが把持するノブを変形させる(請求項6〜8の発明ではノブに設けた変位体の移動によって変形させ、請求項9の発明ではバルーンの拡縮によって変形させる)ことにより、オペレータの触覚を通じて操作レバーの変形を認識させる構成としたから、視覚を通じて操作レバーの変形を認識させる場合と比べて、より確実な負荷情報伝達効果を得ることができる。
【0029】
一方、請求項10,11の発明によると、負荷が一定値以上の場合を含む異常事態の発生時に、操作制限手段(請求項11の発明ではストッパ軸)により、異常事態が進行する方向の操作レバーの操作を制限する構成としたから、異常事態の進行を止めるとともに異常事態発生をオペレータに明確に認識させ、危険事態を速やかにかつ確実に回避することができる。
【0030】
また、負荷情報と異常事態発生をともに操作レバーを通じてオペレータに伝達することから、オペレータは注意を操作レバーのみに集中すればよいため、オペレータの負担を軽減することができる。
【発明を実施するための最良の形態】
【0031】
第1実施形態(図1〜図5参照)
図1にこの操作装置の全体構成を示す。
【0032】
ここでは、操作レバー1を一自由度(たとえば前後方向)で回動させて図示しないリモコン弁を操作し、このリモコン弁からのパイロット圧を図示しない油圧パイロット式コントロールバルブに送って同バルブの位置と開度を制御する場合を例にとっている。
【0033】
操作レバー1は、レバーシャフト2の上端部に逆円錐台形のノブ3が設けられて成り、レバーシャフト2の下端部がレバー軸4によってフロアプレート等の機械固定部分に回動可能に取付けられている。5は後述する操作制限機構(請求項10,11の操作制限手段)である。
【0034】
機械の負荷情報を収集するためのセンサとして、たとえばアクチュエータ(またはポンプ)の圧力を検出する圧力センサ6、アクチュエータ流量(またはポンプ流量)を検出する流量センサ7、ブーム、アーム、バケット等の機械各部の位置を検出する位置センサ8、アクチュエータ(またはアタッチメント)の作動速度を検出する速度センサ9、同加速度を検出する加速度センサ10、それに操作レバー1の操作量を検出する操作量センサ11が設けられ、各センサ6〜11からの信号(検出された各情報)が制御手段としてのコントローラ12に入力される。
【0035】
コントローラ12は、演算部13、変形指令部14、操作制限指令部15を有する。
【0036】
演算部13は、各センサ信号に基づいてそのときの負荷を演算するとともに、この負荷が一定値以上(所謂過負荷)の場合のほか、速度または加速度が設定値を超える場合等、異常事態か否かを判定する。
【0037】
変形指令部14は、演算部13で演算された負荷に応じた変形指令を操作レバー1の負荷情報伝達手段16に送る。
【0038】
一方、操作制限指令部15は、異常事態と判定したときに、異常が進行する方向の操作レバー1の操作を制限する指令を入力制限機構5に送る(後に詳述する)。
【0039】
負荷情報伝達手段16の構成を図2〜図5によって説明する。
【0040】
図2(a)〜(c)は操作レバー1を上から見た平面図、図3(a)〜(c)は同正面図である。また、図4(a)(b)は図2(a)(b)の状態の拡大水平断面図、図5(a)(b)は図4(a)(b)の状態の部分側断面図である。
【0041】
操作レバー1のノブ3の前後両側(図の方向性では左右両側)に凹溝17,17がノブ外周に開口する状態で設けられ、変位体としてのスライダー18,18が、水平方向にスライドしてノブ外周からの突出量Xが増減する状態でこの凹溝17,17に設けられている。
【0042】
一方、このスライダー18,18を外向きに押圧する変位駆動部としてのリンク部材19,19が、スライダー18,18と対向して、かつ、上下動自在な状態で凹溝17,17内に設けられている。
【0043】
このリンク部材19,19は、リンク部材駆動機構(図5中に簡略化して示す)20によって上下に駆動される。
【0044】
リンク部材駆動機構20としては、たとえば電磁石や小型シリンダを駆動源としてワイヤ、復帰バネでリンク部材19を駆動する機構等を用いることができる。
【0045】
スライダー18,18には、リンク部材19,19と対向する内側面に上下方向の傾斜面21,21、リンク部材19,19には、スライダー18,18と対向する面の上端部に回転自在なローラ22,22がそれぞれ設けられ、リンク部材19,19の上下移動時にローラ22,22が傾斜面21,21上を転動し、この傾斜面21,21に対するローラ22,22の転動作用により、スライダー18,18が水平移動してノブ外周からの突出量Xが増減変化するように構成されている。
【0046】
この点の作用を詳述する。
【0047】
操作レバー1がたとえば前方(図2〜図5の左側)に操作された状態で、図1に示すコントローラ12の演算部13によって負荷が演算され、変形指令部14から前側のリンク部材駆動機構20に負荷に応じた量(負荷に比例した量、または比例ではないが負荷に応じて増減する量)の変形指令が送られる。
【0048】
この指令に基づくリンク部材駆動機構20の作動により、リンク部材19が図5(a)に示す上昇位置から同図(b)に示すように負荷に応じた量だけ(図例では最大量)下降移動し、これに伴う傾斜面21に対するローラ22の転動作用により前側スライダー18が外向きに水平移動してノブ外周からの突出量Xが増加する。
【0049】
この作用は、操作レバー1が後方(図2〜図5の右側)に操作された場合も同様に働き、上記のようにスライダー18の突出量Xが増加すること、すなわち、ノブ3の外形が変形することにより、負荷情報がノブ3を把持した手を通じてオペレータに伝達される。
【0050】
この構成によると、負荷情報を、公知技術のレバー振動式のように機械の振動に紛れることなく正確に伝達することができる。
【0051】
しかも、操作レバー1の一部であるノブ3を変形させることによって負荷情報を伝達するため、レバー振動式のようにとくに微操作時にオペレータのレバー操作の妨げとなるおそれがない。
【0052】
この場合、操作レバー1の中立点を挟んだ一方向両側(前後両側)の操作ごとに負荷情報を伝達するため、操作方向の区別をしないで単にレバー1を振動させる公知技術と比べて、負荷情報を一層正確にオペレータに伝達し、修正等の操作に的確に反映させることができる。
【0053】
しかも、操作レバー1のノブ3を負荷の大きさに応じた量で変形させるため、負荷情報をさらに正確にかつ迫真性をもって伝達することができる。
【0054】
また、オペレータが把持するノブ3を変形させることにより、オペレータの触覚を通じて操作レバー1の変形を認識させるため、ノブ3以外のレバー部分の変形を視覚を通じてオペレータに認識させる場合と比べて、より確実な負荷情報伝達効果を得ることができる。
【0055】
なお、図6は、たとえば前後操作でブームの上げ、下げ、左右操作でバケットの掘削、排土動作を行わせる十字型の操作レバーに適用した場合を示す。
【0056】
この十字型の操作レバーの場合には、ノブ3の前後、左右のニ方向両側にスライダー18、リンク部材19、リンク部材駆動機構20を設けて負荷情報伝達手段16を構成すればよい。
【0057】
この場合、二つのアクチュエータ(上記例ではブームシリンダとバケットシリンダ)ごとに負荷情報を伝達することができる。このため、アクチュエータの区別をしないで単にレバーを振動させる公知技術と比べて、負荷情報を一層正確にオペレータに伝達し、修正等の操作に的確に反映させることができる。
【0058】
図7は、操作制限機構5の構成を示す。
【0059】
レバー軸4によって回転自在に支持されたレバーシャフト2の下端部前後両側にアーム23,23が水平に張り出され、このアーム23,23がそれぞれバネ24,24によって支持され、かつ、中立方向に付勢されている。25はバネ受け面である。
【0060】
この両バネ24,24に臨んで両アーム23,23に垂直なストッパ軸26,26が上下動可能に設けられ、このストッパ軸26,26がストッパ軸駆動部(たとえば電磁石とワイヤの組み合わせや小型シリンダ)27,27によって上下動するように構成されている。
【0061】
図7(a)は両ストッパ軸26,26がともに上昇位置にあってストッパ機能が働かず、操作レバー1を自由に操作できる状態を示す。
【0062】
この構成において、たとえば操作レバー1を前方に操作した状態で一定値以上の負荷がかかったり、アクチュエータ速度が一定値を超えたりする等の異常事態が発生すると、図1のコントローラ12の操作制限指令部15から操作制限機構5(正確にはストッパ軸駆動部27)に操作制限指令が送られる。
【0063】
これを受けて操作制限機構5が作動、すなわち、図7(b)に示すように前側ストッパ軸26が下降してバネ受け面25に当接する。これにより、操作レバー1の前方操作が制限される。
【0064】
図7(a)(b)中の○は操作制限されていないこと、×は操作制限されていることをそれぞれ示す。
【0065】
なお、図ではストッパ軸26が最大量下降して操作レバー1の前方操作が一切禁止される状態を示しているが、異常の度合いに応じてストッパ軸26の下降量を調整するようにしてもよい。
【0066】
この作用により、異常事態の進行を止めるとともに異常事態発生をオペレータに明確に認識させ、危険事態を速やかにかつ確実に回避することができる。
【0067】
この場合、反対側への操作は許容されるため、この反対側操作によって異常事態を速やかに解消することができる。
【0068】
また、負荷情報と異常事態発生をともに操作レバー1を通じてオペレータに伝達することから、オペレータは注意を操作レバーのみに集中すればよいため、オペレータの負担を軽減することができる。
【0069】
第2実施形態(図8参照)
第1実施形態との相違点のみを説明する。
【0070】
第2実施形態においては、外部からの給気及び排気作用により拡縮してノブ外周からの突出量Xが増減する状態でノブ3に設けられたバルーン28と、このバルーン28に対する給排気作用を行う給排気手段としての圧縮空気タンク29及び給排気弁30とによって負荷情報伝達手段が構成されている。
【0071】
ここでは十字型操作レバーに対応して前後両側と左右両側に計4個のバルーン28と給排気弁30が設けられた場合を示す。
【0072】
給排気弁30…は、負荷に応じたコントローラ31からの拡縮指令に基づいて位置(給気位置と排気位置)と開度が制御され、これによりバルーン28…が拡縮してノブ外周からの突出量Xが増減変化する。図8には、前側バルーン28が拡張した状態を二点鎖線で示す。
【0073】
この第2実施形態によっても、第1実施形態と同様に、負荷情報をオペレータに正確に、かつ、オペレータの操作を妨げることなく伝達するという効果を得ることができる。
【0074】
他の実施形態
(1)上記実施形態では、前方操作に対しては前側のスライダー18またはバルーン28を作動させる構成としたが、操作方向と、作動するスライダー18またはバルーン28の関係を逆にしてもよい。
【0075】
すなわち、たとえば操作レバー1を前方に操作する場合、オペレータはレバー前面には触れずに後面側を押し、逆に後方操作時に後面には触れずに前面に手を添えて引くことがある。
【0076】
そこで、前方操作時には後側の、後方操作時には前側のそれぞれスライダー18またはバルーン28を作動させるようにしてもよい。
【0077】
(2)負荷情報伝達の方式として、第1実施形態のスライダー方式、第2実施形態のバルーン方式に代えて他の方式、たとえばノブ上面にピンを上下動可能に設け、このピンの突出量を増減させる(ノブ外形を変形させる)ことにより、視覚を通じて負荷情報を伝達する方式等を採用することができる。
【図面の簡単な説明】
【0078】
【図1】本発明の第1実施形態に係る操作装置の全体構成図である。
【図2】(a)(b)(c)は負荷情報伝達手段を設けた操作レバーの概略平面図である。
【図3】(a)(b)(c)は同レバーの概略側面図である。
【図4】(a)(b)は同レバーの拡大水平断面図である。
【図5】(a)(b)は同部分側断面図である。
【図6】操作レバーの前後、左右に負荷情報伝達手段を設けた場合の図4相当図である。
【図7】(a)(b)は操作制限機構付きの操作レバーの概略側面図である。
【図8】本発明の第2実施形態に係る操作装置の全体構成図である。
【符号の説明】
【0079】
1 操作レバー
2 レバーシャフト
3 ノブ
4 レバー軸
5 操作制限機構(操作制限手段)
6 負荷検出手段としての圧力センサ
7 同流量センサ
8 同位置センサ
9 同速度センサ
10 同加速度センサ
11 同操作量センサ
12 コントローラ(制御手段)
13 演算部
14 変形指令部
15 操作制限指令部
16 負荷情報伝達手段
17 凹溝
18 変位体としてのスライダー
19 変位駆動部としてのリンク部材
20 リンク部材駆動機構
21 傾斜面
22 ローラ
X スライダーのノブ外周からの突出量
23 操作制限機構のアーム
24 同バネ
26 同ストッパ軸
27 同ストッパ軸駆動部
28 負荷情報伝達手段を構成するバルーン
29 同圧縮空気タンク
30 同給排気弁
31 コントローラ(制御手段)
【特許請求の範囲】
【請求項1】
操作レバーの操作によりアクチュエータを作動させて作業を行う作業機械の操作装置において、アクチュエータ作動時の負荷を検出する負荷検出手段と、検出される負荷に基づいて変形指令を出力する制御手段と、この制御手段からの変形指令に基づいて操作レバーの少なくとも一部を変形させて負荷情報をオペレータに伝達する負荷情報伝達手段とを具備することを特徴とする作業機械の操作装置。
【請求項2】
操作レバーの中立点を挟んだ一方向両側への操作によって一つのアクチュエータを正逆作動させるように構成され、負荷情報伝達手段は、操作レバーの両側操作ごとに負荷情報を伝達するように構成されたことを特徴とする請求項1記載の作業機械の操作装置。
【請求項3】
一つの操作レバーで複数のアクチュエータを選択作動させるように構成され、負荷情報伝達手段は、アクチュエータごとに負荷情報を伝達するように構成されたことを特徴とする請求項1または2記載の作業機械の操作装置。
【請求項4】
負荷情報伝達手段は、操作レバーの少なくとも一部を、検出される負荷の大きさに応じた量で変形させるように構成されたことを特徴とする請求項1〜3のいずれか1項に記載の作業機械の操作装置。
【請求項5】
オペレータが把持する操作レバーのノブを変形させるように構成されたことを特徴とする請求項1〜4のいずれか1項に記載の作業機械の操作装置。
【請求項6】
負荷情報伝達手段は、操作レバーのノブに移動可能に設けられ変位体と、制御手段からの変形指令に基づいてこの変位体を移動させる変位駆動部とを備え、変位体の移動によるノブの変形により負荷情報を伝達するように構成されたことを特徴とする請求項5記載の作業機械の操作装置。
【請求項7】
操作レバーのノブに、水平方向にスライドしてノブ外周からの突出量が増減する状態で変位体としてのスライダーが設けられ、このスライダーを外向きに押圧する変位駆動部としてのリンク部材がスライダーと対向してノブ内に設けられて負荷情報伝達手段が構成されたことを特徴とする請求項6記載の作業機械の操作装置。
【請求項8】
スライダーとリンク部材の相対向する面の一方に上下方向の傾斜面、他方に回転自在なローラが設けられ、上記傾斜面に対するローラの転動作用によってスライダーを水平方向にスライドさせるように構成されたことを特徴とする請求項7記載の作業機械の操作装置。
【請求項9】
負荷情報伝達手段は、外部からの給気及び排気作用により拡縮してノブ外周からの突出量が増減する状態でノブに設けられたバルーンと、このバルーンに対する給排気作用を行う給排気手段とを有することを特徴とする請求項5記載の作業機械の操作装置。
【請求項10】
制御手段は、負荷が一定値以上の場合を含む異常事態の発生を判定するように構成され、異常発生時に異常事態が進行する方向の操作レバーの操作を制限する操作制限手段が設けられたことを特徴とする請求項1〜9のいずれか1項に記載の作業機械の操作装置。
【請求項11】
水平軸を中心として前後または左右に回動操作される操作レバーに、上下動可能なストッパ軸が、異常発生時に下方移動して操作レバーの操作を制限する状態で設けられて操作制限手段が構成されたことを特徴とする請求項10記載の作業機械の操作装置。
【請求項1】
操作レバーの操作によりアクチュエータを作動させて作業を行う作業機械の操作装置において、アクチュエータ作動時の負荷を検出する負荷検出手段と、検出される負荷に基づいて変形指令を出力する制御手段と、この制御手段からの変形指令に基づいて操作レバーの少なくとも一部を変形させて負荷情報をオペレータに伝達する負荷情報伝達手段とを具備することを特徴とする作業機械の操作装置。
【請求項2】
操作レバーの中立点を挟んだ一方向両側への操作によって一つのアクチュエータを正逆作動させるように構成され、負荷情報伝達手段は、操作レバーの両側操作ごとに負荷情報を伝達するように構成されたことを特徴とする請求項1記載の作業機械の操作装置。
【請求項3】
一つの操作レバーで複数のアクチュエータを選択作動させるように構成され、負荷情報伝達手段は、アクチュエータごとに負荷情報を伝達するように構成されたことを特徴とする請求項1または2記載の作業機械の操作装置。
【請求項4】
負荷情報伝達手段は、操作レバーの少なくとも一部を、検出される負荷の大きさに応じた量で変形させるように構成されたことを特徴とする請求項1〜3のいずれか1項に記載の作業機械の操作装置。
【請求項5】
オペレータが把持する操作レバーのノブを変形させるように構成されたことを特徴とする請求項1〜4のいずれか1項に記載の作業機械の操作装置。
【請求項6】
負荷情報伝達手段は、操作レバーのノブに移動可能に設けられ変位体と、制御手段からの変形指令に基づいてこの変位体を移動させる変位駆動部とを備え、変位体の移動によるノブの変形により負荷情報を伝達するように構成されたことを特徴とする請求項5記載の作業機械の操作装置。
【請求項7】
操作レバーのノブに、水平方向にスライドしてノブ外周からの突出量が増減する状態で変位体としてのスライダーが設けられ、このスライダーを外向きに押圧する変位駆動部としてのリンク部材がスライダーと対向してノブ内に設けられて負荷情報伝達手段が構成されたことを特徴とする請求項6記載の作業機械の操作装置。
【請求項8】
スライダーとリンク部材の相対向する面の一方に上下方向の傾斜面、他方に回転自在なローラが設けられ、上記傾斜面に対するローラの転動作用によってスライダーを水平方向にスライドさせるように構成されたことを特徴とする請求項7記載の作業機械の操作装置。
【請求項9】
負荷情報伝達手段は、外部からの給気及び排気作用により拡縮してノブ外周からの突出量が増減する状態でノブに設けられたバルーンと、このバルーンに対する給排気作用を行う給排気手段とを有することを特徴とする請求項5記載の作業機械の操作装置。
【請求項10】
制御手段は、負荷が一定値以上の場合を含む異常事態の発生を判定するように構成され、異常発生時に異常事態が進行する方向の操作レバーの操作を制限する操作制限手段が設けられたことを特徴とする請求項1〜9のいずれか1項に記載の作業機械の操作装置。
【請求項11】
水平軸を中心として前後または左右に回動操作される操作レバーに、上下動可能なストッパ軸が、異常発生時に下方移動して操作レバーの操作を制限する状態で設けられて操作制限手段が構成されたことを特徴とする請求項10記載の作業機械の操作装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−102399(P2010−102399A)
【公開日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願番号】特願2008−271167(P2008−271167)
【出願日】平成20年10月21日(2008.10.21)
【出願人】(000246273)コベルコ建機株式会社 (644)
【Fターム(参考)】
【公開日】平成22年5月6日(2010.5.6)
【国際特許分類】
【出願日】平成20年10月21日(2008.10.21)
【出願人】(000246273)コベルコ建機株式会社 (644)
【Fターム(参考)】
[ Back to top ]