
作業機械
【課題】作業装置上下動シリンダを含む複数の油圧アクチュエータを備える作業機械において、上下動シリンダを下げ操作したときのエンジン回転速度を、適切に、かつ他の油圧アクチュエータの操作に支障をきたさないように低減させる。
【解決手段】作業機械が、複数の油圧アクチュエータと、油圧アクチュエータにポンプの吐出油を給排するコントロール弁と、コントロール弁による上下動シリンダの操作検知手段と、コントロール弁のネガコン圧検知手段と、エンジンコントローラと、機体コントローラを備え、機体コントローラは、上下動シリンダの下げ操作を検知するとエンジン回転速度を低減させる低減量をネガコン圧の大きさに応じて高いときは大きく低いときは小さく設定しエンジンコントローラに指令する。
【解決手段】作業機械が、複数の油圧アクチュエータと、油圧アクチュエータにポンプの吐出油を給排するコントロール弁と、コントロール弁による上下動シリンダの操作検知手段と、コントロール弁のネガコン圧検知手段と、エンジンコントローラと、機体コントローラを備え、機体コントローラは、上下動シリンダの下げ操作を検知するとエンジン回転速度を低減させる低減量をネガコン圧の大きさに応じて高いときは大きく低いときは小さく設定しエンジンコントローラに指令する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は作業機械、さらに詳しくは、作業装置上下動シリンダによる作業装置下げ時にエンジンの回転速度を可変低減するシステムを備えた作業機械に関する。
【背景技術】
【0002】
代表的な作業機械である油圧ショベルは、エンジンによって駆動される油圧ポンプの吐出油により作動する作業装置上下動シリンダを備えている。そして、作業装置の下げ操作において、作業装置上下動シリンダに大きなパワーおよびスピードが要らない場合にはエンジン回転を低速にして燃費を向上させ、パワーおよびスピードが必要な場合には高速で回転させる技術が開発されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−174574号公報(図5)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の従来の作業機械には、次のとおりの改善の望まれている課題がある。
【0005】
すなわち、作業装置上下動シリンダ下げ操作中においても掘削作業や接地下げ状態ではパワーを必要とするため、特定の下げ操作方法を行った際や吐出ポンプの圧力条件によって、エンジン回転数を低速としない制御が盛り込まれていた。しかし、操作方法やポンプ圧力条件による判別では、実際に掘削作業や接地下げ状態となっても条件を満たさない場合があり、適切にエンジン回転の制御ができない場合があった。また、パワーやスピードが必要な他の油圧アクチュエータを同時に作動させた場合においても、エンジン回転が低速となる場合があり、作業に支障をきたすことがあった。
【0006】
本発明は上記事実に鑑みてなされたもので、その技術的課題は、作業装置上下動シリンダを含む複数の油圧アクチュエータを備える作業機械において、作業装置上下動シリンダを下げ操作したときのエンジン回転速度を、適切に、かつ他の油圧アクチュエータの操作に支障をきたさないように低減させる手段を備えた作業機械を提供することである。
【課題を解決するための手段】
【0007】
本発明によれば上記技術的課題を解決する作業機械は、エンジンによって駆動される油圧ポンプの吐出油により作動する作業装置上下動シリンダを含む複数の油圧アクチュエータと、複数の油圧アクチュエータそれぞれに該ポンプの吐出油を給排するコントロール弁と、コントロール弁による該上下動シリンダの操作状態を検知する操作検知手段と、コントロール弁のセンタバイパス油路の出口側圧力であるネガコン圧を検知するネガコン圧検知手段と、エンジンの回転速度を制御するエンジンコントローラと、機体の作動を制御する機体コントローラと、を備え、機体コントローラは、操作検知手段が作業装置上下動シリンダの下げ操作を検知するとエンジン回転速度を低減させる低減量をネガコン圧検知手段により検知したネガコン圧の大きさに応じてネガコン圧の高いときは大きく低いときは小さく設定しエンジンコントローラに指令する。
【0008】
好適には、機体コントローラは、該低減量として、ネガコン圧の高い側に一定の最大値範囲を、低い側に一定の最小値範囲を設定する。
【発明の効果】
【0009】
本発明に従って構成された作業機械は、作業装置上下動シリンダの下げ操作を操作検知手段が検知すると、機体コントローラはエンジン回転速度を低減させる低減量をネガコン圧検知手段により検知したネガコン圧の大きさに応じてネガコン圧の高いときは大きく低いときは小さく設定しエンジンコントローラに指令する。
【0010】
したがって、作業装置上下動シリンダを含む複数の油圧アクチュエータを備える作業機械において、作業装置上下動シリンダを下げ操作したときのエンジン回転速度を、作業装置上下動シリンダを含む油圧アクチュエータに要求されるパワーおよびスピードの大小をコントロール弁のセンタバイパス油路のネガコン圧によって判定し制御するので、他の油圧アクチュエータの操作に支障をきたさないように低減することができる。
【図面の簡単な説明】
【0011】
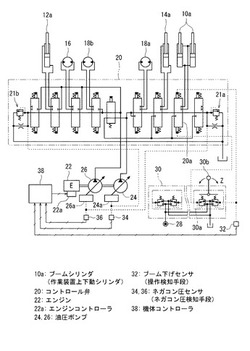
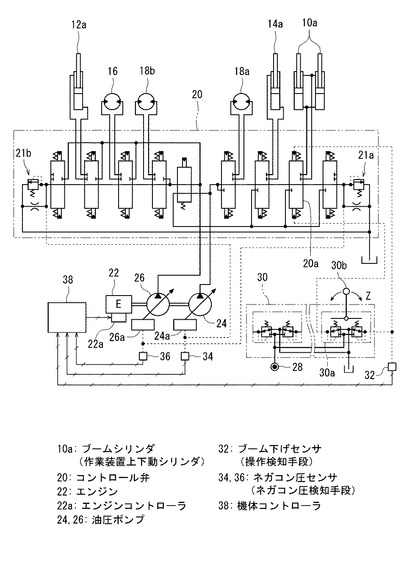
【図1】本発明に従って構成された作業機械の油圧回路図。
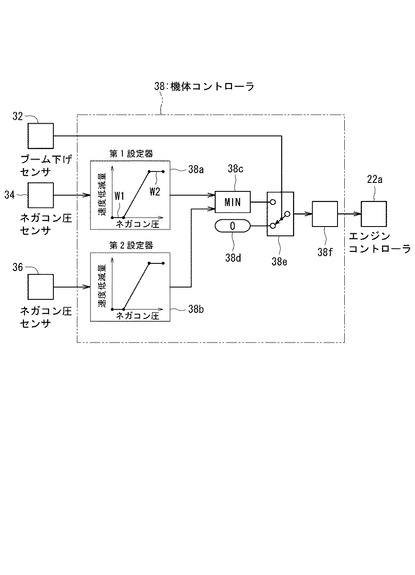
【図2】図1に示す機体コントローラの制御ブロック図。
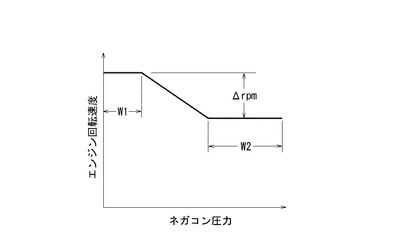
【図3】本発明によるエンジン回転速度制御の説明線図。
【図4】作業機械の代表例である油圧ショベルの側面図。
【発明を実施するための形態】
【0012】
以下、本発明に従って構成された作業機械について、代表的な作業機械である油圧ショベルにおける好適実施形態を図示している添付図面を参照して、さらに詳細に説明する。
【0013】
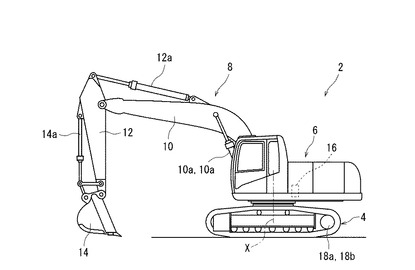
油圧ショベルについて図4を参照して説明する。全体を番号2で示す油圧ショベルは、下部走行体4と、下部走行体4上に鉛直に延びる軸線Xを中心に旋回自在に取付けられた上部旋回体6を備え、上部旋回体6には作業装置8が上下方向に揺動自在に取付けられている。
【0014】
作業装置8は、上部旋回体6に揺動自在に取付けられたブーム10と、ブーム10の先端に揺動自在に取付けられたアーム12と、アーム12の先端に揺動自在に取付けられたバケット14を備えている。作業装置8は、油圧アクチュエータである、上部旋回体6とブーム10の両側の間に介在された作業装置上下動シリンダとしての一対のブームシリンダ10a、10a、ブーム10とアーム12の間に介在されたアームシリンダ12a、およびアーム12とバケット14の間に介在されたバケットシリンダ14aを備えている。
【0015】
油圧ショベル2はまた、油圧アクチュエータとして、上部旋回体6に旋回モータ16、下部走行体4に左右一対の走行モータ18a,18bを備えている。
【0016】
上記の複数の油圧アクチュエータを適宜に作動操作することにより、作業装置8を用いた土砂の掘削・積込・運搬などの作業が遂行される。
【0017】
複数の油圧アクチュエータの作動を制御する油圧回路について、図1を参照して説明する。油圧回路は、ブームシリンダ10a、10a、バケットシリンダ14a、走行モータ18aに、コントロール弁20のそれぞれに対応した方向制御弁を介して作動油を供給する第1の油圧ポンプ24と、アームシリンダ12a、旋回モータ16、走行モータ18bに、コントロール弁20のそれぞれに対応した方向制御弁を介して作動油を供給する第2の油圧ポンプ26を備えている。油圧ポンプ24,26は、エンジン22によって駆動される可変容量形ポンプで、それぞれに容量制御器24a、26aを備えている。
【0018】
コントロール弁20の方向制御弁、例えばブーム用方向制御弁20aは、パイロット圧油によってスプールが操作され作動油の流れ方向、流量を制御する周知のオープンセンタ形の制御弁である。方向制御弁それぞれには、操作のための、パイロット油圧源28のパイロット圧油を給排する比例減圧弁であるリモコン弁30、例えばブーム用方向制御弁20aにはブーム用リモコン弁30aのパイロット圧油管路が接続されている。
【0019】
ブーム用リモコン弁30aの操作レバー30bを例えば矢印Zで示すブーム下げ方向に操作するとブーム用方向制御弁20aの一側に操作に応じた圧力のパイロット圧油が出力され、ブーム用方向制御弁20aからブームシリンダ10a、10aのロッド側に油圧ポンプ24の吐出油が供給されブームシリンダ10aは収縮し作業装置8は下げられる。
【0020】
油圧回路は、コントロール弁20による作業装置上下動シリンダであるブームシリンダ10aの操作状態を検知する操作検知手段としての圧力センサであるブーム下げセンサ32をブーム用リモコン弁30aの下げ操作のパイロット圧油管路に備えている。ブーム下げセンサ32はブーム下げ操作に応じて出力されるパイロット圧力によって操作状態であるか否かを検知する。
【0021】
コントロール弁20の、油圧ポンプ24,26それぞれの吐出油が流れるセンタバイパス油路の出口側にはネガコン圧を規定するリリーフ弁およびオリフィス21a、21bが備えられ、このネガコン圧を検知するネガコン圧検出手段としての、第1の油圧ポンプ24の油路の圧力を検知するネガコン圧センサ34および油圧ポンプ26の油路の圧力を検知するネガコン圧センサ36を備えている。それぞれのネガコン圧は油圧ポンプ24,26の容量制御器34,36にも導かれている。
【0022】
ネガコン圧センサ34,36、ブーム下げセンサ32の出力は、機体の作動を制御する機体コントローラ38に接続されている。
【0023】
図1とともに図2を参照して機体コントローラ38について説明する。
【0024】
機体コントローラ38は、ネガコン圧センサ34の検知圧力信号が入力されネガコン圧に応じてエンジン回転の速度低減量を設定する第1設定器38aと、ネガコン圧センサ36の検知圧力が入力され検知圧力に応じてエンジン回転の速度低減量を設定する第2設定器38bと、第1設定器38aおよび第2設定器38bの出力の低い方の値を選択する選択器38cと、0(ゼロ)値を出力する0値設定器38dと、ブーム下げセンサ32の出力によって出力のあるときは選択器38cの信号を、出力のないときは0値設定器38dの出力を切換え選択する切換器38eと、切換器38eの出力が入力されこの出力に基づいてエンジン22の回転速度を制御するエンジンコントローラ22aに回転速度の低減量を指令する指令器38fを備えている。
【0025】
第1設定器38aおよび第2設定器38bはそれぞれ、エンジン回転の速度低減量をネガコン圧の大きさに応じてネガコン圧の高いときは大きく低いときは小さく設定するとともに、ネガコン圧の高い側に一定の最大値範囲W1を、低い側に一定の最小値範囲W2を設定する。本実施の形態における最小値は0に設定されている。
【0026】
したがって機体コントローラ38は、ブーム下げセンサ(操作検知手段)32がブームシリンダ(作業装置上下動シリンダ)10aの下げ操作を検知するとエンジン回転速度を低減させる低減量を、ネガコン圧センサ(ネガコン圧検知手段)34,36により検知したネガコン圧の大きさに応じてネガコン圧の高いときは大きく低いときは小さく設定しエンジンコントローラ22aに指令する。
【0027】
範囲W1、W2の幅は、ブームシリンダ10aあるいはブームシリンダ10aと同時に他の油圧アクチュエータを操作したときに発生するネガコン圧の変動により速度低減量が敏感に変動しないように、作業機械の作業形態、油圧アクチュエータの操作形態などによって決められる。
【0028】
図1、図2とともに図3を参照して、ブームシリンダ(作業装置上下動シリンダ)10aを下げ操作したときのエンジン回転速度制御について説明する。
【0029】
(1)ネガコン圧Pが小さい場合はエンジン回転速度Nを低減させない:
例えば油圧ショベルにおいてブームシリンダ10a、あるいはブームシリンダ10aと同時に他の油圧アクチュエータを用いて重掘削のような作業を行う、ポンプ吐出流量、エンジンパワーが必要な場合、すなわちコントロール弁20のセンタバイパス油路の流量が少なくネガコン圧Pが小さい場合には、ネガコン圧Pの低い側の一定範囲W1ではエンジン回転速度Nの低減量を最小(本実施例では0)とし、エンジン回転速度Nを下げない。したがって、ネガコン圧Pが低ければ連動等で流量が必要な状態と判断し、回転数低減を止める、もしくは低減回転数を小さくする。
【0030】
(2)ネガコン圧Pが大きい場合はエンジン回転速度Nを低減させる:
例えば油圧ショベルにおいてブームシリンダ10a、あるいはブームシリンダ10aと同時に他の油圧アクチュエータを操作しても、ポンプ吐出流量、エンジンパワーが不要な場合、すなわちコントロール弁20のセンタバイパス油路の流量が大きくネガコン圧Pが大きい場合には、ネガコン圧Pの高い側の一定範囲W2ではエンジン回転速度Nの低減量を最大Δrpmとし、エンジン回転速度を下げ、燃費を改善する。
【0031】
(3)ネガコン圧Pが大小の中間、範囲W1とW2の間の場合は、ネガコン圧Pに応じてエンジン回転速度Nが制御される。
【0032】
図1〜図4を参照して、上述したとおりの作業機械の作用効果について説明する。
【0033】
本発明に従って構成された作業機械2は、作業装置上下動シリンダ10aの下げ操作を操作検知手段32が検知すると、機体コントローラ38はエンジン回転速度Nを低減させる低減量をネガコン圧検知手段34,36により検知したネガコン圧の大きさに応じてネガコン圧Pの高いときは大きく低いときは小さく設定しエンジンコントローラ22aに指令する。
【0034】
したがって、作業装置上下動シリンダ10aを含む複数の油圧アクチュエータを備える作業機械2において、作業装置上下動シリンダ10aを下げ操作したときのエンジン回転速度を、作業装置上下動シリンダ10aを含む油圧アクチュエータに要求されるパワーの大小をコントロール弁20のセンタバイパス油路のネガコン圧Pによって判定し制御するので、他の油圧アクチュエータの操作に支障をきたさないように低減することができる。
【0035】
そして、機体の状態に応じた最適なエンジン回転数となるため、操作性をキープし、効率よく燃費低減が図れる。また、油圧アクチュエータにパワー/スピードが必要な場合はエンジン回転数を下げないようにするため、掘削はもちろん、その他の動作でスピード/パワーが必要な時にも、エンジン回転数Nを下げないようにできる。さらに、ネガコン圧によってそれを判別するので、操作パターンによらず、エンジン回転数を落とせるか否かをリアルタイムに判別できる。
【0036】
また、機体コントローラ38は、エンジン回転速度Nの低減量として、ネガコン圧Pの高い側に一定の最大値範囲W2を、低い側に一定の最小値範囲W1を設定したので、作業装置上下動シリンダ10aあるいは作業装置上下動シリンダ10aと同時に他の油圧アクチュエータを操作したときに発生するネガコン圧の変動による速度低減量の敏感な変動を防止でき、より安定した操作性を確保できる。
【0037】
以上、本発明を実施例に基づいて詳細に説明したが、本発明は上記の実施例に限定されるものではなく、例えば下記のように、本発明の範囲内においてさまざまな変形あるいは修正ができるものである。
【0038】
本発明の実施例においては、作業機械2は多くの油圧アクチュエータを作動操作するために2個の油圧ポンプ24,26を備えているが、作業機械の種類、油圧アクチュエータの数、作動頻度などによって油圧ポンプが1個の場合にも適用することができる。
【0039】
本発明の実施例においては、エンジン回転速度Nの低減量として、ネガコン圧Pの低い側に低減量0の最小値範囲W1を設定したが、最小値範囲W1の低減量は0でなくてもよい。
【符号の説明】
【0040】
2:油圧ショベル(作業機械)
10a:ブームシリンダ(作業装置上下動シリンダ)
20:コントロール弁
22:エンジン
22a:エンジンコントローラ
24:油圧ポンプ
26:油圧ポンプ
32:ブーム下げセンサ(操作検知手段)
34:ネガコン圧センサ(ネガコン圧検知手段)
36:ネガコン圧センサ(ネガコン圧検知手段)
38:機体コントローラ
【技術分野】
【0001】
本発明は作業機械、さらに詳しくは、作業装置上下動シリンダによる作業装置下げ時にエンジンの回転速度を可変低減するシステムを備えた作業機械に関する。
【背景技術】
【0002】
代表的な作業機械である油圧ショベルは、エンジンによって駆動される油圧ポンプの吐出油により作動する作業装置上下動シリンダを備えている。そして、作業装置の下げ操作において、作業装置上下動シリンダに大きなパワーおよびスピードが要らない場合にはエンジン回転を低速にして燃費を向上させ、パワーおよびスピードが必要な場合には高速で回転させる技術が開発されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−174574号公報(図5)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の従来の作業機械には、次のとおりの改善の望まれている課題がある。
【0005】
すなわち、作業装置上下動シリンダ下げ操作中においても掘削作業や接地下げ状態ではパワーを必要とするため、特定の下げ操作方法を行った際や吐出ポンプの圧力条件によって、エンジン回転数を低速としない制御が盛り込まれていた。しかし、操作方法やポンプ圧力条件による判別では、実際に掘削作業や接地下げ状態となっても条件を満たさない場合があり、適切にエンジン回転の制御ができない場合があった。また、パワーやスピードが必要な他の油圧アクチュエータを同時に作動させた場合においても、エンジン回転が低速となる場合があり、作業に支障をきたすことがあった。
【0006】
本発明は上記事実に鑑みてなされたもので、その技術的課題は、作業装置上下動シリンダを含む複数の油圧アクチュエータを備える作業機械において、作業装置上下動シリンダを下げ操作したときのエンジン回転速度を、適切に、かつ他の油圧アクチュエータの操作に支障をきたさないように低減させる手段を備えた作業機械を提供することである。
【課題を解決するための手段】
【0007】
本発明によれば上記技術的課題を解決する作業機械は、エンジンによって駆動される油圧ポンプの吐出油により作動する作業装置上下動シリンダを含む複数の油圧アクチュエータと、複数の油圧アクチュエータそれぞれに該ポンプの吐出油を給排するコントロール弁と、コントロール弁による該上下動シリンダの操作状態を検知する操作検知手段と、コントロール弁のセンタバイパス油路の出口側圧力であるネガコン圧を検知するネガコン圧検知手段と、エンジンの回転速度を制御するエンジンコントローラと、機体の作動を制御する機体コントローラと、を備え、機体コントローラは、操作検知手段が作業装置上下動シリンダの下げ操作を検知するとエンジン回転速度を低減させる低減量をネガコン圧検知手段により検知したネガコン圧の大きさに応じてネガコン圧の高いときは大きく低いときは小さく設定しエンジンコントローラに指令する。
【0008】
好適には、機体コントローラは、該低減量として、ネガコン圧の高い側に一定の最大値範囲を、低い側に一定の最小値範囲を設定する。
【発明の効果】
【0009】
本発明に従って構成された作業機械は、作業装置上下動シリンダの下げ操作を操作検知手段が検知すると、機体コントローラはエンジン回転速度を低減させる低減量をネガコン圧検知手段により検知したネガコン圧の大きさに応じてネガコン圧の高いときは大きく低いときは小さく設定しエンジンコントローラに指令する。
【0010】
したがって、作業装置上下動シリンダを含む複数の油圧アクチュエータを備える作業機械において、作業装置上下動シリンダを下げ操作したときのエンジン回転速度を、作業装置上下動シリンダを含む油圧アクチュエータに要求されるパワーおよびスピードの大小をコントロール弁のセンタバイパス油路のネガコン圧によって判定し制御するので、他の油圧アクチュエータの操作に支障をきたさないように低減することができる。
【図面の簡単な説明】
【0011】
【図1】本発明に従って構成された作業機械の油圧回路図。
【図2】図1に示す機体コントローラの制御ブロック図。
【図3】本発明によるエンジン回転速度制御の説明線図。
【図4】作業機械の代表例である油圧ショベルの側面図。
【発明を実施するための形態】
【0012】
以下、本発明に従って構成された作業機械について、代表的な作業機械である油圧ショベルにおける好適実施形態を図示している添付図面を参照して、さらに詳細に説明する。
【0013】
油圧ショベルについて図4を参照して説明する。全体を番号2で示す油圧ショベルは、下部走行体4と、下部走行体4上に鉛直に延びる軸線Xを中心に旋回自在に取付けられた上部旋回体6を備え、上部旋回体6には作業装置8が上下方向に揺動自在に取付けられている。
【0014】
作業装置8は、上部旋回体6に揺動自在に取付けられたブーム10と、ブーム10の先端に揺動自在に取付けられたアーム12と、アーム12の先端に揺動自在に取付けられたバケット14を備えている。作業装置8は、油圧アクチュエータである、上部旋回体6とブーム10の両側の間に介在された作業装置上下動シリンダとしての一対のブームシリンダ10a、10a、ブーム10とアーム12の間に介在されたアームシリンダ12a、およびアーム12とバケット14の間に介在されたバケットシリンダ14aを備えている。
【0015】
油圧ショベル2はまた、油圧アクチュエータとして、上部旋回体6に旋回モータ16、下部走行体4に左右一対の走行モータ18a,18bを備えている。
【0016】
上記の複数の油圧アクチュエータを適宜に作動操作することにより、作業装置8を用いた土砂の掘削・積込・運搬などの作業が遂行される。
【0017】
複数の油圧アクチュエータの作動を制御する油圧回路について、図1を参照して説明する。油圧回路は、ブームシリンダ10a、10a、バケットシリンダ14a、走行モータ18aに、コントロール弁20のそれぞれに対応した方向制御弁を介して作動油を供給する第1の油圧ポンプ24と、アームシリンダ12a、旋回モータ16、走行モータ18bに、コントロール弁20のそれぞれに対応した方向制御弁を介して作動油を供給する第2の油圧ポンプ26を備えている。油圧ポンプ24,26は、エンジン22によって駆動される可変容量形ポンプで、それぞれに容量制御器24a、26aを備えている。
【0018】
コントロール弁20の方向制御弁、例えばブーム用方向制御弁20aは、パイロット圧油によってスプールが操作され作動油の流れ方向、流量を制御する周知のオープンセンタ形の制御弁である。方向制御弁それぞれには、操作のための、パイロット油圧源28のパイロット圧油を給排する比例減圧弁であるリモコン弁30、例えばブーム用方向制御弁20aにはブーム用リモコン弁30aのパイロット圧油管路が接続されている。
【0019】
ブーム用リモコン弁30aの操作レバー30bを例えば矢印Zで示すブーム下げ方向に操作するとブーム用方向制御弁20aの一側に操作に応じた圧力のパイロット圧油が出力され、ブーム用方向制御弁20aからブームシリンダ10a、10aのロッド側に油圧ポンプ24の吐出油が供給されブームシリンダ10aは収縮し作業装置8は下げられる。
【0020】
油圧回路は、コントロール弁20による作業装置上下動シリンダであるブームシリンダ10aの操作状態を検知する操作検知手段としての圧力センサであるブーム下げセンサ32をブーム用リモコン弁30aの下げ操作のパイロット圧油管路に備えている。ブーム下げセンサ32はブーム下げ操作に応じて出力されるパイロット圧力によって操作状態であるか否かを検知する。
【0021】
コントロール弁20の、油圧ポンプ24,26それぞれの吐出油が流れるセンタバイパス油路の出口側にはネガコン圧を規定するリリーフ弁およびオリフィス21a、21bが備えられ、このネガコン圧を検知するネガコン圧検出手段としての、第1の油圧ポンプ24の油路の圧力を検知するネガコン圧センサ34および油圧ポンプ26の油路の圧力を検知するネガコン圧センサ36を備えている。それぞれのネガコン圧は油圧ポンプ24,26の容量制御器34,36にも導かれている。
【0022】
ネガコン圧センサ34,36、ブーム下げセンサ32の出力は、機体の作動を制御する機体コントローラ38に接続されている。
【0023】
図1とともに図2を参照して機体コントローラ38について説明する。
【0024】
機体コントローラ38は、ネガコン圧センサ34の検知圧力信号が入力されネガコン圧に応じてエンジン回転の速度低減量を設定する第1設定器38aと、ネガコン圧センサ36の検知圧力が入力され検知圧力に応じてエンジン回転の速度低減量を設定する第2設定器38bと、第1設定器38aおよび第2設定器38bの出力の低い方の値を選択する選択器38cと、0(ゼロ)値を出力する0値設定器38dと、ブーム下げセンサ32の出力によって出力のあるときは選択器38cの信号を、出力のないときは0値設定器38dの出力を切換え選択する切換器38eと、切換器38eの出力が入力されこの出力に基づいてエンジン22の回転速度を制御するエンジンコントローラ22aに回転速度の低減量を指令する指令器38fを備えている。
【0025】
第1設定器38aおよび第2設定器38bはそれぞれ、エンジン回転の速度低減量をネガコン圧の大きさに応じてネガコン圧の高いときは大きく低いときは小さく設定するとともに、ネガコン圧の高い側に一定の最大値範囲W1を、低い側に一定の最小値範囲W2を設定する。本実施の形態における最小値は0に設定されている。
【0026】
したがって機体コントローラ38は、ブーム下げセンサ(操作検知手段)32がブームシリンダ(作業装置上下動シリンダ)10aの下げ操作を検知するとエンジン回転速度を低減させる低減量を、ネガコン圧センサ(ネガコン圧検知手段)34,36により検知したネガコン圧の大きさに応じてネガコン圧の高いときは大きく低いときは小さく設定しエンジンコントローラ22aに指令する。
【0027】
範囲W1、W2の幅は、ブームシリンダ10aあるいはブームシリンダ10aと同時に他の油圧アクチュエータを操作したときに発生するネガコン圧の変動により速度低減量が敏感に変動しないように、作業機械の作業形態、油圧アクチュエータの操作形態などによって決められる。
【0028】
図1、図2とともに図3を参照して、ブームシリンダ(作業装置上下動シリンダ)10aを下げ操作したときのエンジン回転速度制御について説明する。
【0029】
(1)ネガコン圧Pが小さい場合はエンジン回転速度Nを低減させない:
例えば油圧ショベルにおいてブームシリンダ10a、あるいはブームシリンダ10aと同時に他の油圧アクチュエータを用いて重掘削のような作業を行う、ポンプ吐出流量、エンジンパワーが必要な場合、すなわちコントロール弁20のセンタバイパス油路の流量が少なくネガコン圧Pが小さい場合には、ネガコン圧Pの低い側の一定範囲W1ではエンジン回転速度Nの低減量を最小(本実施例では0)とし、エンジン回転速度Nを下げない。したがって、ネガコン圧Pが低ければ連動等で流量が必要な状態と判断し、回転数低減を止める、もしくは低減回転数を小さくする。
【0030】
(2)ネガコン圧Pが大きい場合はエンジン回転速度Nを低減させる:
例えば油圧ショベルにおいてブームシリンダ10a、あるいはブームシリンダ10aと同時に他の油圧アクチュエータを操作しても、ポンプ吐出流量、エンジンパワーが不要な場合、すなわちコントロール弁20のセンタバイパス油路の流量が大きくネガコン圧Pが大きい場合には、ネガコン圧Pの高い側の一定範囲W2ではエンジン回転速度Nの低減量を最大Δrpmとし、エンジン回転速度を下げ、燃費を改善する。
【0031】
(3)ネガコン圧Pが大小の中間、範囲W1とW2の間の場合は、ネガコン圧Pに応じてエンジン回転速度Nが制御される。
【0032】
図1〜図4を参照して、上述したとおりの作業機械の作用効果について説明する。
【0033】
本発明に従って構成された作業機械2は、作業装置上下動シリンダ10aの下げ操作を操作検知手段32が検知すると、機体コントローラ38はエンジン回転速度Nを低減させる低減量をネガコン圧検知手段34,36により検知したネガコン圧の大きさに応じてネガコン圧Pの高いときは大きく低いときは小さく設定しエンジンコントローラ22aに指令する。
【0034】
したがって、作業装置上下動シリンダ10aを含む複数の油圧アクチュエータを備える作業機械2において、作業装置上下動シリンダ10aを下げ操作したときのエンジン回転速度を、作業装置上下動シリンダ10aを含む油圧アクチュエータに要求されるパワーの大小をコントロール弁20のセンタバイパス油路のネガコン圧Pによって判定し制御するので、他の油圧アクチュエータの操作に支障をきたさないように低減することができる。
【0035】
そして、機体の状態に応じた最適なエンジン回転数となるため、操作性をキープし、効率よく燃費低減が図れる。また、油圧アクチュエータにパワー/スピードが必要な場合はエンジン回転数を下げないようにするため、掘削はもちろん、その他の動作でスピード/パワーが必要な時にも、エンジン回転数Nを下げないようにできる。さらに、ネガコン圧によってそれを判別するので、操作パターンによらず、エンジン回転数を落とせるか否かをリアルタイムに判別できる。
【0036】
また、機体コントローラ38は、エンジン回転速度Nの低減量として、ネガコン圧Pの高い側に一定の最大値範囲W2を、低い側に一定の最小値範囲W1を設定したので、作業装置上下動シリンダ10aあるいは作業装置上下動シリンダ10aと同時に他の油圧アクチュエータを操作したときに発生するネガコン圧の変動による速度低減量の敏感な変動を防止でき、より安定した操作性を確保できる。
【0037】
以上、本発明を実施例に基づいて詳細に説明したが、本発明は上記の実施例に限定されるものではなく、例えば下記のように、本発明の範囲内においてさまざまな変形あるいは修正ができるものである。
【0038】
本発明の実施例においては、作業機械2は多くの油圧アクチュエータを作動操作するために2個の油圧ポンプ24,26を備えているが、作業機械の種類、油圧アクチュエータの数、作動頻度などによって油圧ポンプが1個の場合にも適用することができる。
【0039】
本発明の実施例においては、エンジン回転速度Nの低減量として、ネガコン圧Pの低い側に低減量0の最小値範囲W1を設定したが、最小値範囲W1の低減量は0でなくてもよい。
【符号の説明】
【0040】
2:油圧ショベル(作業機械)
10a:ブームシリンダ(作業装置上下動シリンダ)
20:コントロール弁
22:エンジン
22a:エンジンコントローラ
24:油圧ポンプ
26:油圧ポンプ
32:ブーム下げセンサ(操作検知手段)
34:ネガコン圧センサ(ネガコン圧検知手段)
36:ネガコン圧センサ(ネガコン圧検知手段)
38:機体コントローラ
【特許請求の範囲】
【請求項1】
エンジンによって駆動される油圧ポンプの吐出油により作動する作業装置上下動シリンダを含む複数の油圧アクチュエータと、
複数の油圧アクチュエータそれぞれに該ポンプの吐出油を給排するコントロール弁と、
コントロール弁による該上下動シリンダの操作状態を検知する操作検知手段と、
コントロール弁のセンタバイパス油路の出口側圧力であるネガコン圧を検知するネガコン圧検知手段と、
エンジンの回転速度を制御するエンジンコントローラと、
機体の作動を制御する機体コントローラと、を備え、
機体コントローラは、
操作検知手段が作業装置上下動シリンダの下げ操作を検知するとエンジン回転速度を低減させる低減量をネガコン圧検知手段により検知したネガコン圧の大きさに応じてネガコン圧の高いときは大きく低いときは小さく設定しエンジンコントローラに指令する、
ことを特徴とする作業機械。
【請求項2】
機体コントローラが、
該低減量として、ネガコン圧の高い側に一定の最大値範囲を、低い側に一定の最小値範囲を設定する、
ことを特徴とする請求項1記載の作業機械。
【請求項1】
エンジンによって駆動される油圧ポンプの吐出油により作動する作業装置上下動シリンダを含む複数の油圧アクチュエータと、
複数の油圧アクチュエータそれぞれに該ポンプの吐出油を給排するコントロール弁と、
コントロール弁による該上下動シリンダの操作状態を検知する操作検知手段と、
コントロール弁のセンタバイパス油路の出口側圧力であるネガコン圧を検知するネガコン圧検知手段と、
エンジンの回転速度を制御するエンジンコントローラと、
機体の作動を制御する機体コントローラと、を備え、
機体コントローラは、
操作検知手段が作業装置上下動シリンダの下げ操作を検知するとエンジン回転速度を低減させる低減量をネガコン圧検知手段により検知したネガコン圧の大きさに応じてネガコン圧の高いときは大きく低いときは小さく設定しエンジンコントローラに指令する、
ことを特徴とする作業機械。
【請求項2】
機体コントローラが、
該低減量として、ネガコン圧の高い側に一定の最大値範囲を、低い側に一定の最小値範囲を設定する、
ことを特徴とする請求項1記載の作業機械。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−23821(P2013−23821A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−156531(P2011−156531)
【出願日】平成23年7月15日(2011.7.15)
【出願人】(505236469)キャタピラー エス エー アール エル (144)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月15日(2011.7.15)
【出願人】(505236469)キャタピラー エス エー アール エル (144)
【Fターム(参考)】
[ Back to top ]