
作業機
【課題】カルパーコーティング処理が施された種籾の如き粉粒体に適応した供給形態でも、鉄コーティング処理が施された種籾の如き粉粒体に適応した供給形態でも粉粒体供給を行なうことができるようにする。
【解決手段】粉粒体供給装置Aによって供給される粉粒体を落下させる溝を圃場に形成する作溝器115が作用状態になり、かつ粉粒体が落下した溝に土寄せ作用する覆土体116が作用状態になった第1作業形態と、作溝器115が作用状態になり、かつ覆土体116が解除状態になった第2作業形態と、作溝器115及び覆土体116が解除状態になった第3作業形態とを現出自在に構成してある。
【解決手段】粉粒体供給装置Aによって供給される粉粒体を落下させる溝を圃場に形成する作溝器115が作用状態になり、かつ粉粒体が落下した溝に土寄せ作用する覆土体116が作用状態になった第1作業形態と、作溝器115が作用状態になり、かつ覆土体116が解除状態になった第2作業形態と、作溝器115及び覆土体116が解除状態になった第3作業形態とを現出自在に構成してある。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、粉粒体タンクに貯留された粉粒体を駆動回転自在な繰出し回転体によって繰出し、前記繰出し回転体が繰出した粉粒体を筒状体が形成している落下供給路を介して圃場に供給する粉粒体供給装置が備えられた作業部を車体後部に連結された作業機に関する。
【背景技術】
【0002】
従来、例えば特許文献1に示されるように、走行機体の後部に播種装置が連結され、播種装置に、ホッパ、繰出し機構、作溝器及び覆土部材が設けられた作業機があった。この作業機では、繰出し機構によってホッパから種籾が繰出され、繰出し機構によって繰出された種籾が作溝器によって田面に形成された埋設溝に播かれ、種籾を播いた埋設溝が覆土部材によって埋め戻される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−209260号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記した従来の作業機にあっては、ホッパに入れて圃場に供給される粉粒体の種類如何にかかわらず、圃場に供給された粉粒体に対する覆土が行なわれるのであり、実際問題として、覆土の必要がないように鉄コーティング処理が施された種籾の如き粉粒体を供給する作業には不適切なものとなっていた。
【0005】
本発明の目的は、カルパーコーティング処理が施された種籾の如き粉粒体に適応した供給形態での粉粒体供給作業を行なうことができるのみならず、鉄コーティング処理が施された種籾の如き粉粒体に適応した供給形態での粉粒体供給作業をも行なうことができる作業機を提供することにある。
【課題を解決するための手段】
【0006】
本第1発明は、粉粒体タンクに貯留された粉粒体を駆動回転自在な繰出し回転体によって繰出し、前記繰出し回転体が繰出した粉粒体を筒状体が形成している落下供給路を介して圃場に供給する粉粒体供給装置が備えられた作業部を車体後部に連結された作業機であって、
前記粉粒体供給装置によって供給される粉粒体を落下させる溝を圃場に形成する作溝器が作用状態になり、かつ粉粒体が落下した溝に土寄せ作用する覆土体が作用状態になった第1作業形態と、前記作溝器が作用状態になり、かつ前記覆土体が解除状態になった第2作業形態と、前記作溝器及び前記覆土体が解除状態になった第3作業形態とを現出自在に構成してある。
【0007】
本第1発明の構成によると、第1作業形態を現出すれば、作溝器が作用状態になって粉粒体供給装置によって供給される粉粒体を落下させる溝を圃場に形成し、覆土体が作用状態になって粉粒体が落下した溝に土寄せし、圃場に供給された粉粒体を精度よく埋設される状態にできる。第2作業形態を現出すれば、作溝器が作用状態になって粉粒体供給装置によって供給される粉粒体を落下させる溝を圃場に形成し、覆土体が解除状態になって粉粒体が落下した溝に対する土寄せを行なわず、粉粒体供給装置から圃場に供給された粉粒体を溝内に位置させながら強制的な土掛けが行なわれない状態にできる。第3作業形態を現出すれば、作溝器が解除状態になって圃場に溝を形成しないとともに覆土体が解除状態になって土寄せを行なわず、粉粒体供給装置から圃場に供給された粉粒体を圃場面に位置するとともに強制的な土掛けが行なわれない状態にできる。
【0008】
従って、カルバーコーティング処理が施された種籾の如き粉粒体を精度よく埋設されて鳥についばまれないようにその粉粒体に適応した供給形態で供給作業することができる。また、鉄コーティング処理が施された種籾の如き粉粒体を覆土されなくて空気に触れやすいようにその粉粒体に適応した供給状態で供給作業することがでる。さらに、鉄コーティング処理が施された種籾の如き粉粒体の場合、第2作業形態を選択して現出させることにより、粉粒体を空気に触れやすい状態にしながら溝内に位置して強い風が吹いても供給箇所から位置ずれしにくくすることや、第3作業形態を選択して現出させることにより、粉粒体を圃場面に露出させて太陽光にもより触れやすくすることができる。
【0009】
本第2発明では、前記作溝器を、前記筒状体に対して昇降調節自在に連通させてある。
【0010】
本第2発明の構成によると、筒状体の対地高さを変更せずに、作溝器によって圃場に形成される溝の深さを変更することができる。
【0011】
従って、粉粒体の品種や性状などが異なる場合など、粉粒体供給装置による粉粒体の供給を一定の対地高さから行なわせて、たとえば点播精度をよくしながら、異なる深さの溝に供給することができる。
【0012】
本第3発明では、前記作溝器及び前記覆土体を支持する支持フレームを、前記筒状体の前付近を作業部横方向に通って前記作溝器を支持する前部フレームと、前記筒状体の後付近を作業部横方向に通って前記覆土体を支持する後部フレームと、前記前部フレームと前記後部フレームを連結する連結フレームとを備えて構成してある。
【0013】
本第3発明の構成によると、筒状体の前方や後方に石や工具が存在するとか近づけられることがあっても、筒状体に当りにくいように前部フレームや後部フレームによってガードさせることができる。
【0014】
従って、作溝器及び覆土体の支持フレームをガードに活用して安価に筒状体の変形や破損を防止することができる。
【0015】
本第4発明では、前記後部フレームを、前記筒状体の後側を開放するメンテナンス状態に切換え自在に構成してある。
【0016】
本第4発明の構成によると、後部フレームをメンテナンス状態に切換えることにより、筒状体の後側を開放でき、後部フレームや覆土体を筒状体の清掃や交換などの作業に対する障害にならないようにできる。
【0017】
従って、後部フレームを筒状体の後側に対するガードに活用できるものでありながら、後部フレームをメンテナンス状態に切換えることにより、筒状体のメンテナンスが行ないやすくなる。
【0018】
本第5発明では、前記筒状体に後方向き開口を設けてある。
【0019】
本第5発明の構成によると、粉粒体供給装置によって圃場に供給される粉粒体の落下の有無を作業部の後方から筒状体の後方向き開口を介して見通すことを可能にできる。
【0020】
従って、粉粒体供給装置による粉粒体の供給の有無を補助作業者が後方から容易に確認して粉粒体切れなどによる供給ミスの発生を防止されるようにできる。
【図面の簡単な説明】
【0021】
【図1】作業機の全体を示す側面図である。
【図2】作業部の全体を示す後面図である。
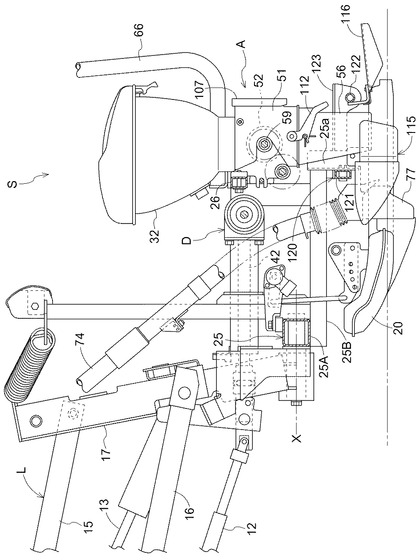
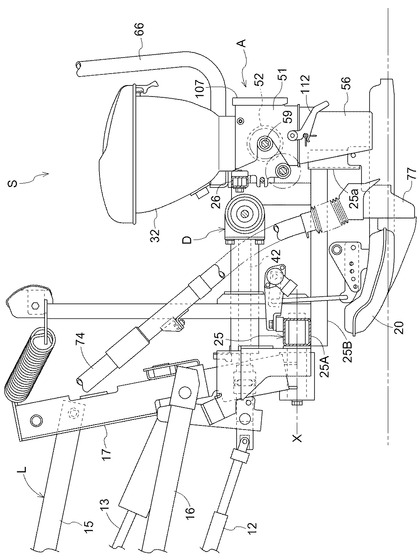
【図3】作業部の一部を示す側面図である。
【図4】作業部の一部を示す平面図である。
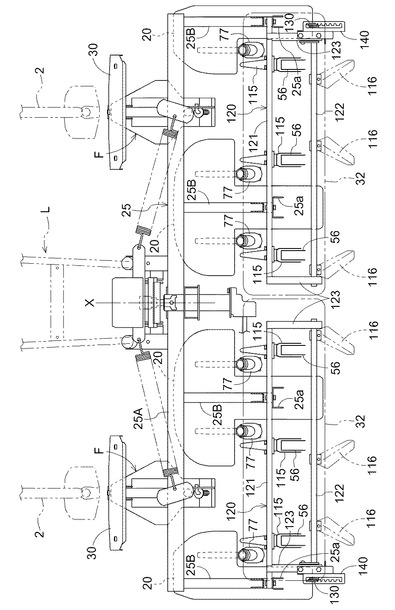
【図5】作業部の一部を示す後面図である。
【図6】作業部の作溝器及び覆土体が取り付けられ部位を示す後面図である。
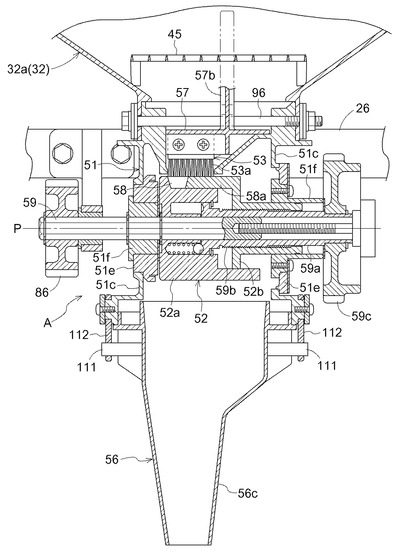
【図7】粉粒体供給装置を示す縦断側面図である。
【図8】粉粒体供給装置を示す縦断後面図である。
【図9】作業部の第2作業形態を現出された状態での側面図である。
【図10】作業部の第2作業形態を現出された状態での平面図である。
【図11】作業部の第3作業形態を現出された状態での側面図である。
【図12】作業部の第3作業形態を現出された状態での平面図である。
【図13】支持フレームを示す斜視図である
【図14】後部フレームの筒状体の後側を開放した状態での斜視図である。
【図15】支持フレームの連結構造を示す側面図である。
【図16】図15のXVI−XVI断面矢視図である。
【図17】覆土体の姿勢変化を示す側面図である。
【図18】筒状体の後側を開放した状態を示す側面図である。
【図19】別の実施構造を備えた作業部の一部を示す斜視図である。
【発明を実施するための形態】
【0022】
以下、本発明の実施の形態を図面に基づいて説明する。
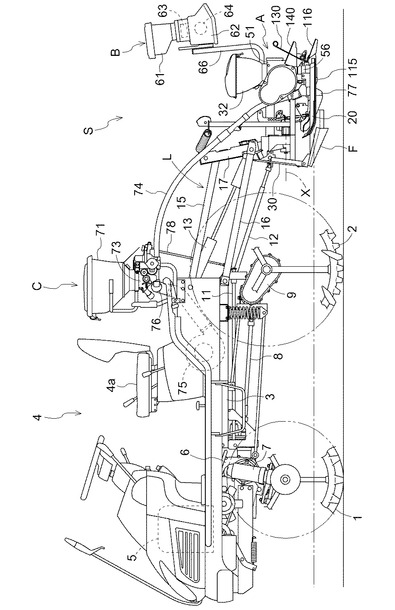
図1は、本発明の実施形態に係る作業機の全体を示す側面図である。この図に示すように、本発明の実施形態に係る作業機は、左右一対の操向操作及び駆動自在な前車輪1,1と左右一対の駆動自在な後車輪2,2とによって自走する自走車と、この自走車の車体フレーム3の後部にリンク機構Lを介して連結された作業部Sと、自走車の車体後部に配置された肥料タンク71を有する施肥装置Cとを備えて構成してある。
【0023】
自走車は、車体前部に設けたエンジン5を備え、このエンジン5が出力する駆動力を車体前部に位置するミッションケース6に入力し、このミッションケース6に入力した駆動力をミッションケース6の内部に位置する走行ミッションから前輪駆動ケース7に伝達して左右一対の前車輪1,1を駆動し、ミッションケース6に入力したエンジン5からの駆動力を前記走行ミッションから回転軸8を介して車体後部に位置する後輪駆動ケース9に伝達して左右一対の後車輪2,2を駆動する。自走車は、車体後部に位置する運転座席4aを有した運転部4を備え、この運転部4に搭乗して運転するように乗用型になっている。自走車は、前記ミッションケース6に入力したエンジン5からの駆動力を、ミッションケース6の内部に位置する作業ミッションから車体フレーム3の下方に位置する回転軸11と、この回転軸11の後端部から車体後方向きに延出する伝動軸12とを介して作業部Sの駆動機構Dの入力軸42(図3参照)に伝達する。
【0024】
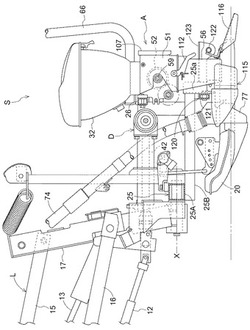
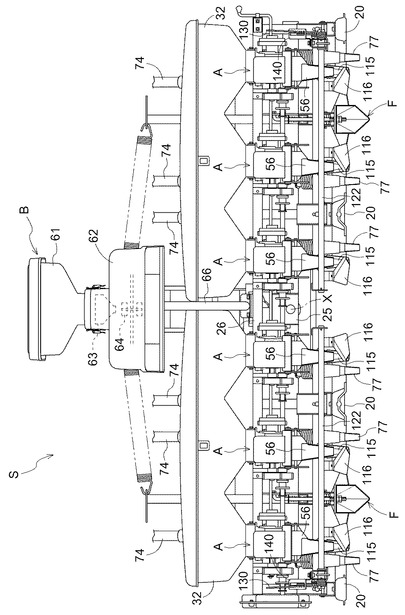
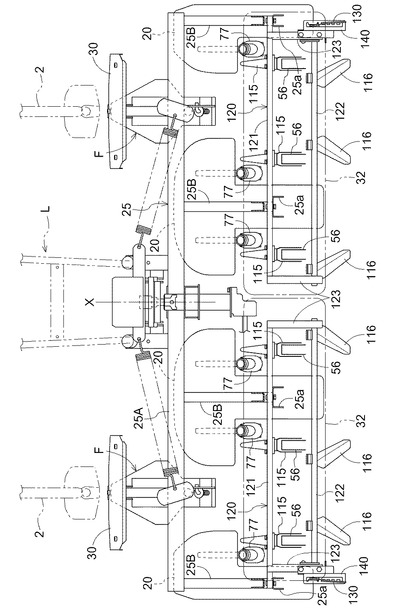
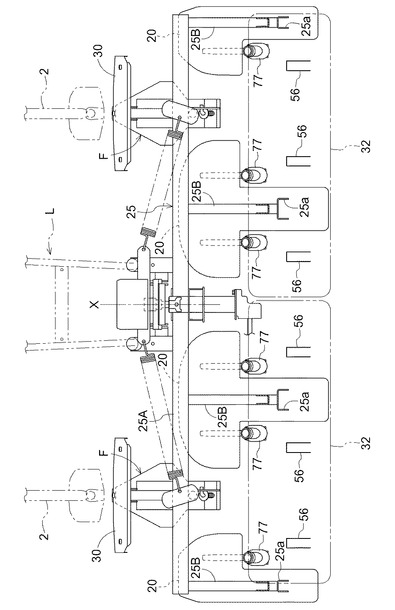
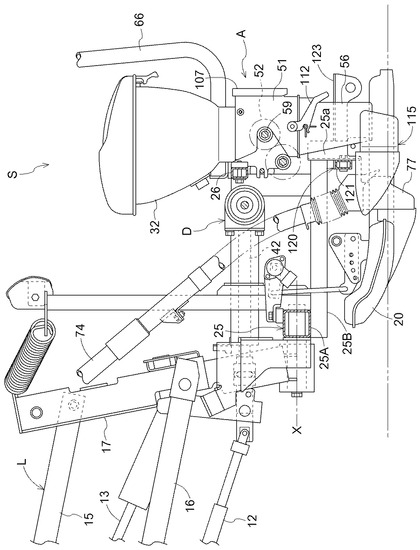
図2は、作業部Sの全体を示す後面図である。図3は、作業部Sの一部を示す側面図である。図4は、作業部Sの一部を示す平面図である。図5は、作業部Sの一部を示す後面図である。これらの図及び図1に示すように、作業部Sは、リンク機構Lにおける後部リンク17の下端部に前端部が連結された作業部フレーム25と、作業部フレーム25の下部に車体横方向に並べて取り付けられた4つの接地フロート20と、作業部フレーム25が備える支持フレーム26に車体横方向に並べて取り付けられた6つの粉粒体供給装置Aと、作業部フレーム25が備える支柱66に取り付けられた薬剤散布装置Bと、作業部フレーム25の前部に装着された左右一対の作溝体F,Fとを備えている。
【0025】
リンク機構Lは、車体フレーム3の後部から後方向きに上下揺動自在に延出する上部リンク15及び下部リンク16と、上部リンク15と下部リンク16の後端部に連結された後部リンク17を備えている。後部リンク17には、作業部フレーム25が連結されており、リンク機構Lは、車体フレーム3と後部リンク17に亘って連結された油圧シリンダ13によって車体フレーム3に対して上下に揺動操作されて、作業部Sを、4つの接地フロート20が圃場に接地した下降作業位置と各接地フロート20が圃場から上昇した上昇非作業位置とに昇降操作する。
【0026】
後部リンク17は、作業部フレーム25を車体前後向きのローリング軸芯Xまわりにローリング自在に支持しており、作業部Sは、自走車の左右傾斜にかかわらず車体横方向で水平状態になるように、自走車に対してローリング軸芯Xまわりにローリングする。
【0027】
作業機は、作業部Sを下降作業位置に下降させて自走車を走行させると、6つの粉粒体供給装置Aによって稲の種籾aを6条供給で圃場に供給する播種作業と、施肥装置Cによって6条の種籾に対する肥料供給を行なう施肥作業と、薬剤散布装置Bによって雑草防止などの薬剤を圃場に散布する薬剤散布作業と、左右一対の作溝体F,Fによって圃場に排水溝を形成する作溝作業を行なう。各粉粒体供給装置Aによって供給される種播aは、接地フロート20の通過によって整地された箇所に供給される。
【0028】
図1,2,4に示すように、左右一対の作溝体F,Fは、後車輪2の通過跡に排水溝を形成するように配置されている。左右一対の作溝体F,Fの前端側は、泥除け板30を介して作業部フレーム25に支持されている。泥除け板30は、後車輪2によって跳ね上げられた泥土を作業部Sの内部に入らないように受け止める。
【0029】
施肥装置Cについて説明する。
図1,2,3,4に示すように、施肥装置Cは、前記肥料タンク71を備える他、この肥料タンク71の下部に連設された肥料繰出し機構73、この肥料繰出し機構73の肥料排出部に送風管76を介して接続された電動ブロワ75を備えて構成してある。肥料繰出し機構73は、車体横方向に並んだ6つの肥料排出口(図示せず)を備えている。肥料繰出し機構73の各肥料排出口は、作業部Sの下部に車体横方向に並べて設けた6つの作溝施肥器77に各別に肥料供給ホース74を介して接続されている。肥料繰出し機構73は、走行トランスミッションからの駆動力を入力軸78によって入力して駆動される。
【0030】
施肥装置Cは、肥料タンク71に貯留された粒状の肥料を肥料繰出し機構73によって肥料タンク71から各肥料排出口(図示せず)に繰出し、各肥料排出口に繰出した肥料を電動ブロワ75によって供給される搬送風によって肥料供給ホース74を介して作溝施肥器77に供給する。図2,3に示すように、6つの作溝施肥器77は、各粉粒体供給装置Aが備える筒状体56のやや横側でかつやや前側に一つずつ位置するように配置してあり、各作溝施肥器77は、粉粒体供給装置Aが筒状体56から圃場に供給する種籾aの横側近くで圃場に溝を形成し、形成した溝に肥料供給ホース74からの肥料を供給する。
【0031】
肥料供給ホース74のうち肥料を後方向きに送る経路から肥料を作溝施肥器77に向けて落下させる経路に切り換わる経路切り換わり箇所に排風部を設け、経路切り換わり箇所で搬送風を排出して作溝施肥器77に搬送風を送らないで肥料だけを送るように構成すると、搬送風が粉粒体供給装置Aの筒状体56に流入することを回避しながら肥料供給を行なうことができる。
【0032】
薬剤散布装置Bについて説明する。
図1,2に示すように、薬剤散布装置Bは、前記支柱66の上端部に散布機ケースが連結された電動散布機62と、電動散布機62の上部に取付けられた薬剤タンク61とを備えて構成してある。電動散布機62は、散布機ケースの内部に駆動回転自在に設けられた繰出し皿63及び回転散布体64を備え、薬剤タンク61に貯留された薬剤を、繰出し皿63及び回転散布体64によって散布機ケースの外部に飛散させて、各粉粒体供給装置Aによって種籾aが供給された後の圃場に散布する。
【0033】
粉粒体供給装置Aについて説明する。
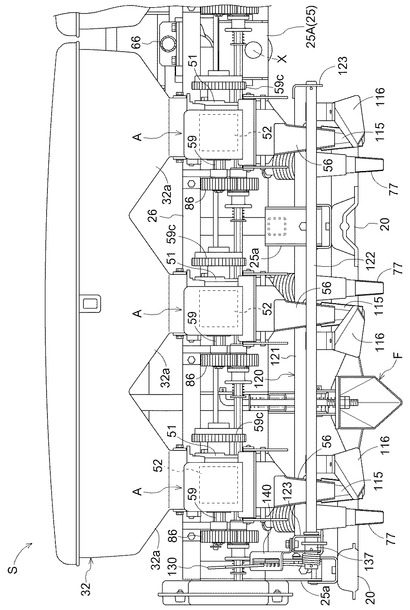
6つの粉粒体供給装置Aは、同じ構造を備えるよう構成されている。図1,2,3,5に示すように、粉粒体供給装置Aは、粉粒体タンク32の底部に形成されたロート部32aに上端部が連結された繰出しケース51、及び繰出しケース51の下端部に装着された筒状体56を備えて構成してある。作業部左側の3つの粉粒体供給装置Aのための粉粒体タンク32及び作業部右側の3つの粉粒体供給装置Aのための粉粒体タンク32のそれぞれは、対応する3つの粉粒体供給装置Aに共用の一つのタンクに構成されている。
【0034】
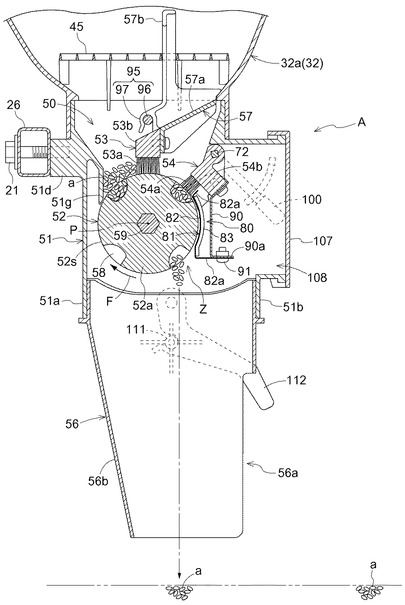
図7は、粉粒体供給装置Aを示す縦断側面図である。図8は、粉粒体供給装置Aを示す縦断後面図である。これらの図及び図3,5に示すように、繰出しケース51は、作業部フレーム25における支持フレーム26に連結ボルト21によって脱着自在に連結された連結部51dを有した前壁板部51aと、メンテナンス開口108を有した後壁板部51bと、回転体支持部51eを有した左右一対の横壁板部51c,51cとを樹脂素材で一体成形した状態で備えて構成してあり、樹脂製の上下向きの筒状になっており、上側で粉粒体タンク32のロート部32aに連通し、下側で筒状体56に連通している。メンテンナンス開口108は、蓋体107の脱着によって開閉される。
【0035】
図7,8に示すように、繰出しケース51の内部に、繰出し回転体52、繰出し回転体52の上側に繰出し回転体52の周方向に分散させて配置した一対の摺り切り体53,54、一対の摺り切り体53,54のうちの繰出し回転体回転方向下手側に位置する下手側の摺り切り体54のブラシ部54aに対して繰出し回転体回転方向下手側に位置する箇所に繰出し回転体52の周面52sに沿わせた配置した繰出しガイド80、繰出し回転体52の上方に配置した流下案内板57を設けてある。
【0036】
繰出し回転体52は、回転支軸59、及び回転支軸59と左右一対の横壁板部51c,51cの回転体支持部51eの間に介装されたボス部材51fを介して左右一対の横壁板部51c,51cに回転自在に支持されている。繰出し回転体52は、回転支軸59の車体横向き軸芯で成る回転軸芯Pまわりに回転支軸59によって回転方向F(図7参照)に回転駆動される。繰出し回転体52の周面52sに、4つの繰出し凹部58を繰出し回転体52の回転方向Fに所定間隔を隔てて並ぶ配置で設けてある。
【0037】
一対の摺り切り体53,54のうちの繰出し回転体回転方向上手側に位置する上手側の摺り切り体53と繰出しケース51の内側に一体成形した壁体51gとにより、繰出し回転体52の繰出し凹部58に対する種籾供給を行なう供給スペース50を繰出し回転体52の上端側の上方に繰出し回転体52の周面52sに臨ませた状態で形成してある。
【0038】
流下案内板57は、傾斜姿勢の案内面57aを備え、粉粒体タンク32に貯留され、ロート部32aの底部内に装着された格子体45の粉粒体流通孔から流下した種籾aを、案内面57aによって一対の摺り切り体53,54の間には流下しないで供給スペース50に流下するように案内する。
【0039】
図7に示すように、繰出しガイド80は、繰出し回転体52の周面52sに沿って位置する案内面81を備え、繰出し回転体52の繰出し凹部58に入り込んで繰出し回転体52の下端側に設置してある排出箇所Zに移動する種籾aに対して案内面81によって案内作用する。すなわち、繰出しガイド80は、繰出し凹部58が下手側の摺り切り体54のブラシ部54aを通過してから排出箇所Zに至るまでは、繰出し凹部58が横向きや下向きになっても種籾aが繰出し凹部58からこぼれ出ないで繰出し凹部58に滞留し、繰出し凹部58が排出箇所Zに到達して下向きになると、種籾aが繰出し凹部58から落下して排出されるように種籾aに対して案内作用する。
【0040】
図7に示すように、上流側の摺り切り体53は、流下案内板57の下端部に支持されたブラシ支持部53bと、このブラシ支持部53bに植設されたブラシ部53aとを備えて構成してある。下流側の摺り切り体54は、繰出しケース51に回転支軸72を介して支持されるブラシ支持部54bと、このブラシ支持部54bに植設されたブラシ部54aとを備えて構成してある。一対の摺り切り体53,54は、繰出し回転体52の繰出し凹部58に入り込んだ種籾aに対してブラシ部53a,54aによって摺り切り作用する。
【0041】
従って、粉粒体供給装置Aは、回転支軸59の一端部に一体回転自在に設けた駆動ギヤ86に駆動機構Dによって動力伝達されて回転支軸59が回転駆動されることにより、繰出し回転体52を回転支軸59によって回転方向Fに駆動し、粉粒体タンク32に貯留された種籾aを回転する繰出し回転体52によって供給スペース50を介して、繰出し凹部58の容積によって設定される設定量ずつ間欠的に繰出し、繰出し回転体52が繰出した種籾aを圃場に落下させて点播供給の形態で供給する。
【0042】
つまり、粉粒体タンク32に貯留され、ロート部32aに装着された格子体45の粉粒体流通孔から流下した種籾aを、流下案内板57による流下案内によって供給スペース50に流下させて滞留する。繰出し回転体52を回転方向Fに駆動することにより、各繰出し凹部58が供給スペース50と排出箇所Zの間を移動する。繰出し凹部58は、供給スペース50に位置すると、供給スペース50の種籾aを流入させて収容する。種籾aを収容した繰出し凹部58は、上手側及び下手側の摺り切り体53,54のブラシ部53a,54aを通ってブラシ部53a,54aによる摺り切り作用を受け、この後、繰出しガイド80が位置する移動経路を下降移動する。このとき、繰出し凹部58が横向きや下向きになっても、繰出しガイド80の案内面81による種籾aに対する案内作用によって種籾aが繰出し凹部58からこぼれ出ない。繰出し凹部58が排出箇所Zに至ると、繰出し凹部58が下向きになるとともに繰出しガイド80による案内作用が解除され、繰出し凹部58に収容されていた種籾aが繰出し凹部58から筒状体56の内部に落下する。繰出し凹部58から落下した種籾aは、筒状体56が形成している落下経路を、風を受けて分散しないように筒状体56によって風当たり防止されながら落下して、作溝施肥器77よりもやや後側でかつやや横側で圃場に落下する。
【0043】
肥料供給ホース74に送り込まれた搬送風を筒状体56に導入するよう構成すると、電動ブロワ75からの風を種籾供給に活用して繰出し回転体52からの種籾aを圃場に向けて供給することができる。
【0044】
図7に示すように、繰出しガイド80は、案内面81を形成するガイド本体82と、ガイド本体82に対して案内面81が位置する側とは反対側に設けた吸音材83とを備えて構成してある。
【0045】
ガイド本体82は、下流側の摺り切り体54のブラシ保持部54bから下方向きに延出する支持体90の下端部90aに折り曲げ端部82aが連結ねじ91によって連結されたステンレス鋼板によって構成してある。ガイド本体82は、種籾aを繰出し回転体52とガイド本体82との間に入り込み易くする屈曲ガイド部82bを備えている。吸音材83は、ガイド本体82の案内面81を形成する側とは反対側の面に密着させてある。
【0046】
従って、繰出しガイド80では、種籾aが鉄コーティング処理をされた種籾である場合、種籾aと案内面81が擦れ合って発生する音を吸音材83によって減衰させながら種籾aに対する案内作用を行なう。
【0047】
繰出しガイド80は、ガイド本体82の下端側の折り曲げ端部82aで支持体90に支持されていることにより、支持体90に対し、繰出しガイド80の繰出し回転体回転方向上手側が繰出し回転体回転方向下手側に位置する側を揺動支点側にして繰出し回転体52の半径方向に揺動する状態になっている。
【0048】
従って、繰出し凹部58に収容された種籾aは、下流側の摺り切り体54のブラシ部54aを通過した後、繰出しガイド80による案内作用を受ける移動経路に入り、この移動経路を排出箇所Zに向かって移動する。移動経路に入る種籾aは、摺り切り体53,54による摺り切り不良などによって種籾aの一部が繰出し凹部58の外側に突出した嵩高状態になっていても、繰出しガイド80の繰出し回転体回転方向上手側に位置する側であって、揺動支点側とは反対側に位置する側を繰出し回転体52から離れる側に容易に押圧揺動させて、種籾aとガイド本体82の案内面81の擦れ合いを弱い状態に抑制しながら移動経路に入っていく。移動経路を排出箇所Zに向かって移動する種籾aは、ガイド本体82による押圧作用が徐々に強くなる状態でのガイド本体82による案内作用を受けて嵩高状態を解消しながら移動する。
【0049】
支持体90は、板金部材によって構成されていて、摺り切り体54のブラシ支持部54bに連結されている部位を揺動支点にして繰出し回転体52の半径方向に揺動しやすくなっており、繰出しガイド80は、支持体90の揺動変形によっても、ガイド本体82と繰出し回転体52による種籾aの挟持力の増大を防止して、種籾aと案内面81の擦れ合いを弱くなるように抑制する。
【0050】
下流側の摺り切り体54は、回転支軸72を介して繰出しケース51に揺動操作自在に支持されている。繰出しケース51の外部に配置して回転支軸72の端部に取り付けてある開閉レバー100によって回転支軸72が回転操作されることにより、摺り切り体54及び繰出しガイド80は、開放姿勢に切換えられて繰出し回転体52の外周側に排出経路を形成し、粉粒体タンク32に残留した種籾aを排出経路から筒状体56の内部に排出することができる。
【0051】
図7,8に示すうように、流下案内板57は、流下案内板57と繰出しケース51にわたって設けた連結手段95によって繰出しケース51の内部に脱着自在に取り付けられている。連結手段95は、繰出しケース51の内部にロッドを設置して設けた支持体96と、流下案内板57に一体成形した連結フック97を備えて構成してある。
【0052】
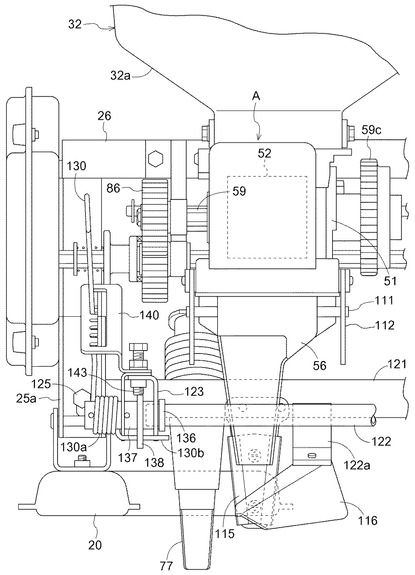
図8に示すように、繰出し回転体52は、4つの繰出し凹部58が設けられた繰出し回転体本体52aと、4つの繰出し凹部58に各別に係入する4つの容量調整バー58aが設けられた容量調整体52bとを備えて構成してある。容量調整体52bの内周側に設けてある操作ネジ部が、回転支軸59に相対回転自在に外嵌している調整筒軸59aの外周側に設けた送りネジ部59bに係合している。容量調整体52bは、繰出しケース51の外部に配置して調整筒軸59aの端部に一体回転自在に設けてある調節ダイヤル59cよって調節筒軸59aが回転操作されることにより、送りネジ部59bによる送り作用によって繰出し回転体本体52aに対して移動操作されて各容量調整バー58aを繰出し凹部58に対して出退させ、各容量調整バー58aの繰出し凹部58に対する入り込み長さを変更する。これにより、繰出し回転体52の各繰出し凹部58の容量が変更され、繰出し回転体52による種籾aの繰出し量を変更できる。
【0053】
図7,8,9に示すように、筒状体56は、筒状体56の上端側の両横外側に設けた連結突起111と、連結突起111に係脱するように構成して繰出しケース51の両横外側に揺動操作自在に設けた連結フック112とによって繰出しケース51に脱着自在に連結されている。
【0054】
図5,7,9に示すように、筒状体56の下部に車体後方向きの後方向き開口56aを形成してあり、作業部Sの後方から後方向き開口56aを介して筒状体56の内部を見通して、種籾aの供給が行なわれているか否かを判断することができる。
【0055】
図2〜12に示すように、作業部Sの下方に作業部横方向(車体横方向)に並ぶ6つの作溝器115及び作溝器115の後方で作業部横方向に並ぶ6つの覆土体116の脱着を行ない、装着状態の覆土体116の姿勢変更を行なうことにより、粉粒体供給装置Aによる種籾供給を行なう作業部Sの作業形態として第1作業形態と第2作業形態と第3作業形態を現出できるように構成してある。
【0056】
すなわち、図2,4に示すように、6つの作溝器115及び6つの覆土体116のうちの作業部左側(車体左側)の3つの粉粒体供給装置Aに対応させる3つの作溝器115及び3つの覆土体116は、左用の支持フレーム120に支持されており、6つの作溝器115及び6つの覆土体116のうちの作業部右側(車体右側)の3つの粉粒体供給装置Aに対応させる3つの作溝器115及び3つの覆土体116は、左用の支持フレーム120とは別体の支持フレームに構成された右用の支持フレーム120に支持されている。
【0057】
左用の支持フレーム120では、覆土調整レバー130を左端部に配置されて支持しており、右用の支持フレーム120では、覆土調整レバー130を右端部に配置されて支持しており、左用の支持フレーム120と右用の支持フレーム120とは、覆土調整レバー130の配置箇所の点において相違しているが、その他の点において同じ構造を備えている。
【0058】
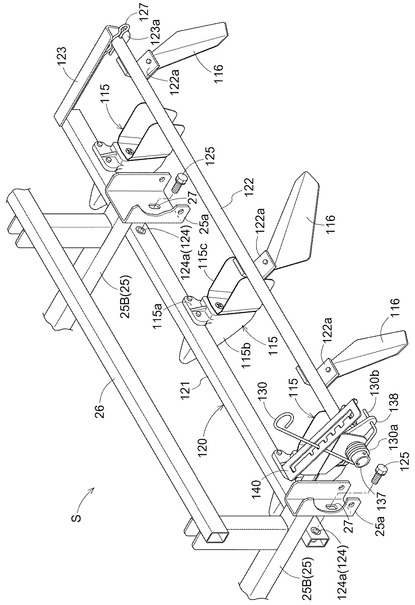
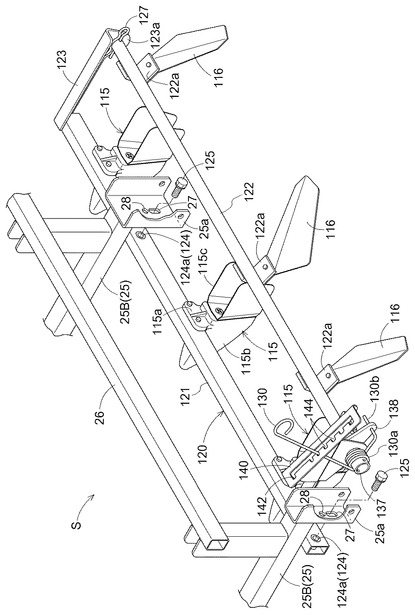
図13は、左用の支持フレーム120を示す斜視図である。この図及び図4に示すように、左用及び右用の支持フレーム120は、3つの作溝器115を支持する作業部前後方向(車体前後方向)の前部フレーム121と、前部フレーム121の後方に所定間隔を隔てて位置して3つの覆土体116を支持する作業部横向き(車体横向き)の後部フレーム122と、前部フレーム121及び後部フレーム122の両端側で前部フレーム121と後部フレーム122を連結する作業部前後向き(車体前後向き)の連結フレーム123とを備えて構成してある。
【0059】
図15は、支持フレーム120の連結構造を示す側面図である。この図及び図4に示すように、支持フレーム120は、前部フレーム121の長手方向での2箇所にメネジ筒124aが設けられている連結部124を備えている。
【0060】
図12,13,15に示すように、作業部フレーム25を、作業部横向き(車体横向き)のメインフレーム25Aと、メインフレーム25Aの作業部横方向での複数箇所から後方向きに延出するフロート支持フレーム25Bと備えて構成し、各フロート支持フレーム25Bの後部にブラケットを取り付けて支持フレーム120のための支持部25aを形成してある。
【0061】
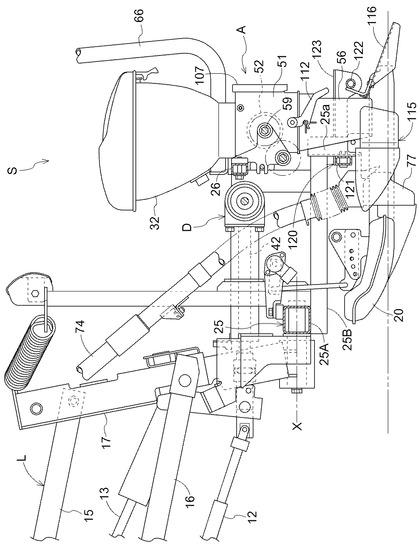
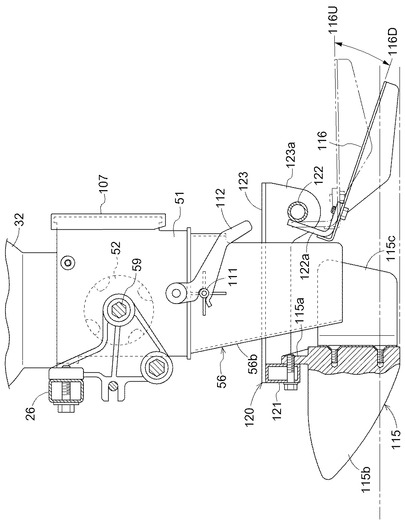
図14,17に示すように、各作溝器115は、前部フレーム121に連結部115aで連結された先細り形状の作溝器本体115bと、作溝器本体115bの背面に連結された接続部115cとを備えて構成してある。接続部115cは、作業部上下方向視(車体上下方向視)で後方向きに開口する溝形に形成してあり、筒状体56の内部の後向き開口56aを開口115dによって開いた状態にしながら筒状体56に連通する。
【0062】
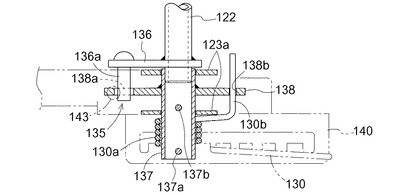
図13に示すように、各覆土体116は、覆土体116の前端部が後部フレーム122にブラケットを取り付けて設けた支持部122aに連結されることにより、後部フレーム122に支持されている。後部フレーム122の両端部は、連結フレーム123の後端部に形成された支持部123aに回転自在に枢支されている。図13,15,16に示すように、後部フレーム122は、後部フレーム122の作業部横外側に位置する側の端部に一体回転自在に設けた揺動アーム136を備えた連動機構135を介して覆土調節レバー130に連動されている。
【0063】
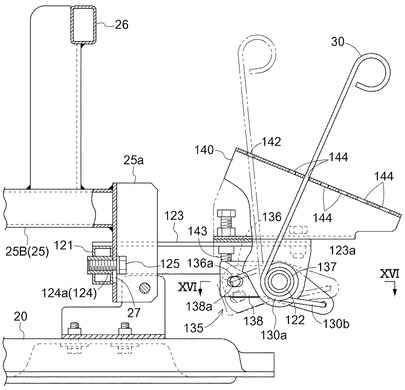
覆土調節レバー130は、連結フレーム123の支持部123aに回転自在に支持された支持筒137に外嵌されたコイル部130aを備えたバネ鋼線材によって構成してある。覆土調節レバー130は、抜け止めピン137a(図16参照)によって外れ止めされている。図15,16に示すように、後部フレーム122と覆土調節レバー130を連動させる連動機構135は、後部フレーム122に一体回転自在に設けた揺動アーム136と、揺動アーム136に支持された連動ピン136aと、この連動ピン136aが係入する出力孔138aを備えた状態で支持筒137に一体回転自在に設けた揺動リンク138と、揺動リンク138に設けた入力孔138bに係入するように構成して覆土調節レバー130に備えてある連動アーム130bとを備えて構成してある。支持筒137は、図16に示す如く抜け止めピン137aと位置決めピン137bがコイル部130a及び支持部123aを挟んでいることにより、支持部123aに対する所定の取り付け位置に位置決めされている。
【0064】
従って、後部フレーム122は、覆土調節レバー130が後部フレーム122の軸芯まわりにレバーガイド140のガイド溝141に沿わせて揺動操作されることにより、揺動アーム136、連動ピン136a、揺動リンク138を介して覆土調節レバー130によって回転操作されて覆土体116を後部フレーム122の軸芯まわりに上下揺動させる。すなわち、覆土調節レバー130をガイド溝141に沿わせて揺動操作することにより、覆土体116を図17に実線で示す作用状態としての下降使用の取り付け姿勢116Dと、図17に二点差線で示す第1の解除状態としての上昇格納の取り付け姿勢116Uとに変更できる。覆土体116を第1の解除状態に操作した場合、覆土調節レバー130をレバーガイド141の一端側に形成された格納凹部142に係止させることにより、覆土板116を第1の解除状態の取り付け姿勢116Uに保持できる。覆土板116を作用状態に操作した場合、レバーガイド140を連結フレーム123に連結する一対の連結ボルトの一方の連結ボルトで成るストッパー143が揺動リンク138を受け止め支持し、揺動リンク138がストッパー143に当接してからも、覆土調節レバー130をガイド溝141に沿わせてレバーガイド140の他端側に向けて揺動操作してレバーガイド140に覆土調節レバー130の移動方向に並べて形成された複数個の使用凹部144のうちの一つに係止させることにより、覆土調節レバー130を弾性変形状態に保持でき、覆土調節レバー130の弾性復元力を、覆土体116を土圧に抗して下降付勢する操作力として覆土体116に作用させることができる。複数個の使用凹部144のうちの格納凹部142からの距離がより大となるものを選択して使用することにより、覆土調節レバー130の弾性変形量をより大にして、覆土体116に作用する下降付勢力をより大にできる。
【0065】
図2,3,4は、作業部Sの第1作業形態を現出された状態を示している。これらの図に示すように、カルパーコーティング処理が施された種籾aあるいはコーティング処理が施されていない種籾aを圃場に供給する播種作業を行なう場合、左用の支持フレーム120を前部フレーム121で作業部フレーム25の左側2箇所の支持部25a,25aに連結し、右用の支持フレーム120を前部フレーム122で作業部フレーム25の右側2箇所の支持部25a,25aに連結することにより、6つの作溝器115を各粉粒体供給装置Aの下方に一つずつ位置し、かつ接続部115cが筒状体56の下端部に外嵌する取り付け状態で作業部Sに取り付けることができて、6つの作溝器115が作用状態になる。そして、6つの覆土体116を各作溝器115の後方に一つずつ位置する取り付け状態で作業部Sに装着することができ、左用及び右用の支持フレーム120に装着してある覆土調節レバー130をガイド溝141の他端側(後方側)に揺動操作して複数個の使用凹部144のいずれか一つに係止させることにより、6つの覆土体116が作用状態になり、作業部Sは、第1作業形態を現出された状態になる。第1作業形態を現出された作業部Sは、6つの作溝器115によって圃場に6条の溝を形成し、形成した6条の溝のそれぞれに粉粒体供給装置Aによって種籾aを落下させて供給し、種籾aを供給した後の溝に覆土体116によって土寄せして種籾aを埋める。
【0066】
図9は、作業部Sの第2作業形態を現出された状態での側面図である。図10は、作業部Sの第2作業形態を現出された状態での平面図である。これらの図に示すように、鉄コーティング処理が施された種籾aを圃場に供給する播種作業を行なう場合、カルパーコーティング処理が施された種籾aあるいはコーティング処理が施されていない種籾aの播種作業を行なう場合と同様に、左用及び右用の支持フレーム120を作業部フレーム25に連結することにより、6つの作溝器115を各粉粒体供給装置Aの下方に一つずつ位置し、かつ接続部115cが筒状体56の下端部に外嵌する取り付け状態で作業部Sに取り付けることができ、6つの作溝器115が作用状態なる。そして、左用及び右用の支持フレーム120に装着してある覆土調節レバー130をガイド溝144の一端側(前方側)に揺動操作して格納凹部142に係止させることにより、6つの覆土体116が第1の解除状態になり、作業部Sは、第2作業形態を現出された状態になる。第2作業形態を現出された作業部Sは、6つの作溝器115によって圃場に6条の溝を形成し、形成した6条の溝のそれぞれに粉粒体供給装置Aによって種籾aを落下させて供給し、種籾aを供給した後の溝には覆土体116による土寄せを行なわず、種籾aを強い風があっても溝から出ないで所定の供給箇所から位置ずれしないように、かつ空気に触れるように溝内に露出した状態にする。
【0067】
図11は、作業部Sの第3作業形態を現出された状態での側面図である。図12は、作業部Sの第3作業形態を現出された状態での平面図である。これらの図に示すように、鉄コーティング処理が施された種籾aを圃場に供給する播種作業を行なう場合、左用及び右用の支持フレーム120を作業部フレーム25から取り外すことにより、6つの作溝器115を取り外すことができて、6つの作溝器115が解除状態になり、6つの覆土体116を取り外すことができて、6つの覆土体116が第2の解除状態になり、作業部Sは、第3作業形態を現出された状態になる。第3作業形態を現出された作業部Sは、6つの粉粒体供給装置Aによって圃場面に種籾aを供給し、供給した種籾aを空気や太陽光に触れやすいように圃場面に露出した状態にする。
【0068】
図4及び図17に示すように、作溝器115及び覆土体116を作業部Sに取り付けた状態では、支持フレーム120における前部フレーム121が粉粒体供給装置Aの筒状体56の前付近を作業部横方向に通る状態になり、支持フレーム120における後部フレーム122が粉粒体供給装置Aの筒状体56の後付近を作業部横方向に通る状態になり、前部フレーム121及び後部フレーム122は、筒状体56に対するガードになる。
【0069】
図13,15に示すように、作業部フレーム25の支持部25aに連結ボルト125が装着されるよう設けた取付け孔27を作業部上下方向に長い形状に形成して調節孔としてあり、支持フレーム120の作業部フレーム25に対する連結位置を取付け孔27の形状の作用によって作業部上下方向に変更調節して、作溝器115を筒状体56に対して昇降調節することができ、筒状体56の対地高さを変更せずに、作溝器115によって形成される溝の深さを変更できるようになっている。筒状体56に対する作溝器115の昇降調節を行なうと、覆土体116が作溝器115と共に昇降し、作溝器115によって形成される溝の深さ変更にかかわらず、覆土体116は、昇降調節された作溝器115が形成する溝の深さに適応した適切な作用深さで土寄せを行なう。
【0070】
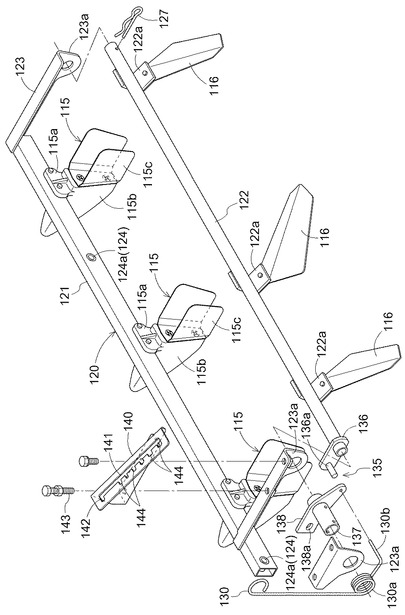
図14は、支持フレーム120における後部フレーム122の筒状体56の後側を開放した状態での斜視図である。この図に示すように、後部フレーム122の端部に装着される抜け止めピン127を取り外すことにより、後部フレーム122を連結フレーム123に対して覆土調節レバー130が位置する側とは反対側にスライド操作できる。後部フレーム122をこのようにスライド操作すれば、後部フレーム122が覆土調節レバー130を装着してある側の連結フレーム123の支持部123a及び支持筒137から抜け外れ、かつ連動アーム136の連結ピン136aが揺動リンク138から抜け外れる。覆土調節レバー130が位置する側の連結フレーム123及び揺動リンク138から抜け外れた後部フレーム122を、覆土調節レバー130が位置する側にスライド操作すれば、覆土調節レバー130が位置する側とは反対側の連結フレーム123から抜け外れ、作業部フレーム25に連結された状態の支持フレーム120のうちの後部フレーム122のみを取り外すことができる。
【0071】
図18は、筒状体56の後側を開放した状態を示す側面図である。この図及び図14に示すように、支持フレーム120における後部フレーム122は、支持フレーム120から取り外されることにより、筒状体56の後側を開放するメンテナンス状態になり、作溝器115を作業部Sに取り付けたままにしても、筒状体56を繰出しケース51の後方から繰出しケース51に対して脱着することができる。
【0072】
図3,7,8に示すように、筒状体56の前側縁56bを、作業部側面視で筒状体56の下端に近づくほど後側に位置する傾斜縁に形成し、筒状体56の後向き開口56aが位置している下部56cを、前後方向視で下細り形状に形成することにより、作溝施肥器77から排出される肥料搬送風が筒状体56に下向き開口から流入することを防止するように、筒状体56の下向き開口を作溝施肥器77に対して極力後方及び横側に離間させてある。
【0073】
〔別実施例〕
図19は、作業形態を切換えるための別の実施構造を備えた作業部Sの一部を示す斜視図である。この図に示すように、別の実施構造を備えた作業部Sにあっては、作業部フレーム20の各支持部25aに、長孔形の取付け孔27の上方に配置した取付け孔28を設けてある。
【0074】
各支持部25aの取付け孔27は、支持フレーム120の取り付け高さを変更して作溝器115及び覆土体116の作用状態での取り付け高さを変更調節する調節孔を構成するものである。
【0075】
取付け孔28は、支持フレーム120における前部フレーム121が取付け孔27から付け替えられることにより、作溝器115を圃場面から浮上して溝形成を行わない取り付け高さ、すなわち解除状態に切換える。
尚、取付け孔28の配置高さとしては、覆土調節レバー130が使用凹部144に係止されても覆土体116が実際には解除状態となる配置高さに設定してもよく、また覆土調節レバー130が格納凹部142に係止されることによって覆土体116が解除状態となる配置高さに設定してもよい。
【0076】
取付け孔28と取付け孔27を一連の長孔によって構成して、取付け孔27の上部に前部フレーム121を取り付けることで作溝器115の解除状態を現出するように構成してよい。この場合、高さ調節しようとする作溝器115を上げ過ぎてしまう誤操作が行なわれる虞がある。これに対し、作溝器115を解除状態に切換える取付け孔28と、作溝器115の作用状態での高さ変更を行なう取付け孔27とを、離れて位置する別孔によって構成してあるから、上記した誤操作を行なわれることがない。
【0077】
〔別の実施形態〕
(1)上記した実施例では、作溝器115を粉粒体供給装置Aの筒状体56の直下に位置する箇所で溝を形成するよう構成した例を示したが、粉粒体供給装置Aの筒状体56よりも前方に位置する箇所で圃場に溝を形成するよう構成して実施してもよい。
【0078】
(2)上記した実施例では、左用の作溝器115及び覆土体116と、右用の作溝器115及び覆土体116とを別々に脱着するよう構成した例を示したが、左用の作溝器115及び覆土体116と右用の作溝器115及び覆土体116を、共用の支持フレームに支持させて一挙に脱着するよう構成して実施してもよい。また、全ての作溝器115を別々に脱着して作用状態と解除状態に切換えるように構成して実施してもよい。各作溝器115を前部フレーム121に作用状態と解除状態に付け替えるよう構成して実施してもよい。各作溝器115を前部フレーム121に対して作用状態と解除状態に横軸芯まわりで切り換わるように揺動及び固定自在に取り付けて、あるいは上下移動で切り換わるようにスライド及び固定自在に取り付けて実施してもよい。全ての覆土体116を後部フレーム122に対して個々に上下揺動あるいは上下スライド操作して作用状態と解除状態に切換えるように構成して実施してもよい。
【0079】
(3)上記した実施例では、6条供給の形態で種籾aの供給を行なう例を示したが、4条供給や8条供給など、6条以外の条数での供給形態で種籾aを供給するように構成して実施してもよい。
【産業上の利用可能性】
【0080】
本発明は、種籾などの種子の他、肥料、薬剤など、種子以外の粉粒体を供給する作業機にも利用できる。
【符号の説明】
【0081】
32 粉粒体タンク
52 繰出し回転体
56 筒状体
56a 筒状体の後向き開口
115 作溝器
116 覆土体
120 支持フレーム
121 前部フレーム
122 後部フレーム
123 連結フレーム
A 粉粒体供給装置
【技術分野】
【0001】
本発明は、粉粒体タンクに貯留された粉粒体を駆動回転自在な繰出し回転体によって繰出し、前記繰出し回転体が繰出した粉粒体を筒状体が形成している落下供給路を介して圃場に供給する粉粒体供給装置が備えられた作業部を車体後部に連結された作業機に関する。
【背景技術】
【0002】
従来、例えば特許文献1に示されるように、走行機体の後部に播種装置が連結され、播種装置に、ホッパ、繰出し機構、作溝器及び覆土部材が設けられた作業機があった。この作業機では、繰出し機構によってホッパから種籾が繰出され、繰出し機構によって繰出された種籾が作溝器によって田面に形成された埋設溝に播かれ、種籾を播いた埋設溝が覆土部材によって埋め戻される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−209260号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記した従来の作業機にあっては、ホッパに入れて圃場に供給される粉粒体の種類如何にかかわらず、圃場に供給された粉粒体に対する覆土が行なわれるのであり、実際問題として、覆土の必要がないように鉄コーティング処理が施された種籾の如き粉粒体を供給する作業には不適切なものとなっていた。
【0005】
本発明の目的は、カルパーコーティング処理が施された種籾の如き粉粒体に適応した供給形態での粉粒体供給作業を行なうことができるのみならず、鉄コーティング処理が施された種籾の如き粉粒体に適応した供給形態での粉粒体供給作業をも行なうことができる作業機を提供することにある。
【課題を解決するための手段】
【0006】
本第1発明は、粉粒体タンクに貯留された粉粒体を駆動回転自在な繰出し回転体によって繰出し、前記繰出し回転体が繰出した粉粒体を筒状体が形成している落下供給路を介して圃場に供給する粉粒体供給装置が備えられた作業部を車体後部に連結された作業機であって、
前記粉粒体供給装置によって供給される粉粒体を落下させる溝を圃場に形成する作溝器が作用状態になり、かつ粉粒体が落下した溝に土寄せ作用する覆土体が作用状態になった第1作業形態と、前記作溝器が作用状態になり、かつ前記覆土体が解除状態になった第2作業形態と、前記作溝器及び前記覆土体が解除状態になった第3作業形態とを現出自在に構成してある。
【0007】
本第1発明の構成によると、第1作業形態を現出すれば、作溝器が作用状態になって粉粒体供給装置によって供給される粉粒体を落下させる溝を圃場に形成し、覆土体が作用状態になって粉粒体が落下した溝に土寄せし、圃場に供給された粉粒体を精度よく埋設される状態にできる。第2作業形態を現出すれば、作溝器が作用状態になって粉粒体供給装置によって供給される粉粒体を落下させる溝を圃場に形成し、覆土体が解除状態になって粉粒体が落下した溝に対する土寄せを行なわず、粉粒体供給装置から圃場に供給された粉粒体を溝内に位置させながら強制的な土掛けが行なわれない状態にできる。第3作業形態を現出すれば、作溝器が解除状態になって圃場に溝を形成しないとともに覆土体が解除状態になって土寄せを行なわず、粉粒体供給装置から圃場に供給された粉粒体を圃場面に位置するとともに強制的な土掛けが行なわれない状態にできる。
【0008】
従って、カルバーコーティング処理が施された種籾の如き粉粒体を精度よく埋設されて鳥についばまれないようにその粉粒体に適応した供給形態で供給作業することができる。また、鉄コーティング処理が施された種籾の如き粉粒体を覆土されなくて空気に触れやすいようにその粉粒体に適応した供給状態で供給作業することがでる。さらに、鉄コーティング処理が施された種籾の如き粉粒体の場合、第2作業形態を選択して現出させることにより、粉粒体を空気に触れやすい状態にしながら溝内に位置して強い風が吹いても供給箇所から位置ずれしにくくすることや、第3作業形態を選択して現出させることにより、粉粒体を圃場面に露出させて太陽光にもより触れやすくすることができる。
【0009】
本第2発明では、前記作溝器を、前記筒状体に対して昇降調節自在に連通させてある。
【0010】
本第2発明の構成によると、筒状体の対地高さを変更せずに、作溝器によって圃場に形成される溝の深さを変更することができる。
【0011】
従って、粉粒体の品種や性状などが異なる場合など、粉粒体供給装置による粉粒体の供給を一定の対地高さから行なわせて、たとえば点播精度をよくしながら、異なる深さの溝に供給することができる。
【0012】
本第3発明では、前記作溝器及び前記覆土体を支持する支持フレームを、前記筒状体の前付近を作業部横方向に通って前記作溝器を支持する前部フレームと、前記筒状体の後付近を作業部横方向に通って前記覆土体を支持する後部フレームと、前記前部フレームと前記後部フレームを連結する連結フレームとを備えて構成してある。
【0013】
本第3発明の構成によると、筒状体の前方や後方に石や工具が存在するとか近づけられることがあっても、筒状体に当りにくいように前部フレームや後部フレームによってガードさせることができる。
【0014】
従って、作溝器及び覆土体の支持フレームをガードに活用して安価に筒状体の変形や破損を防止することができる。
【0015】
本第4発明では、前記後部フレームを、前記筒状体の後側を開放するメンテナンス状態に切換え自在に構成してある。
【0016】
本第4発明の構成によると、後部フレームをメンテナンス状態に切換えることにより、筒状体の後側を開放でき、後部フレームや覆土体を筒状体の清掃や交換などの作業に対する障害にならないようにできる。
【0017】
従って、後部フレームを筒状体の後側に対するガードに活用できるものでありながら、後部フレームをメンテナンス状態に切換えることにより、筒状体のメンテナンスが行ないやすくなる。
【0018】
本第5発明では、前記筒状体に後方向き開口を設けてある。
【0019】
本第5発明の構成によると、粉粒体供給装置によって圃場に供給される粉粒体の落下の有無を作業部の後方から筒状体の後方向き開口を介して見通すことを可能にできる。
【0020】
従って、粉粒体供給装置による粉粒体の供給の有無を補助作業者が後方から容易に確認して粉粒体切れなどによる供給ミスの発生を防止されるようにできる。
【図面の簡単な説明】
【0021】
【図1】作業機の全体を示す側面図である。
【図2】作業部の全体を示す後面図である。
【図3】作業部の一部を示す側面図である。
【図4】作業部の一部を示す平面図である。
【図5】作業部の一部を示す後面図である。
【図6】作業部の作溝器及び覆土体が取り付けられ部位を示す後面図である。
【図7】粉粒体供給装置を示す縦断側面図である。
【図8】粉粒体供給装置を示す縦断後面図である。
【図9】作業部の第2作業形態を現出された状態での側面図である。
【図10】作業部の第2作業形態を現出された状態での平面図である。
【図11】作業部の第3作業形態を現出された状態での側面図である。
【図12】作業部の第3作業形態を現出された状態での平面図である。
【図13】支持フレームを示す斜視図である
【図14】後部フレームの筒状体の後側を開放した状態での斜視図である。
【図15】支持フレームの連結構造を示す側面図である。
【図16】図15のXVI−XVI断面矢視図である。
【図17】覆土体の姿勢変化を示す側面図である。
【図18】筒状体の後側を開放した状態を示す側面図である。
【図19】別の実施構造を備えた作業部の一部を示す斜視図である。
【発明を実施するための形態】
【0022】
以下、本発明の実施の形態を図面に基づいて説明する。
図1は、本発明の実施形態に係る作業機の全体を示す側面図である。この図に示すように、本発明の実施形態に係る作業機は、左右一対の操向操作及び駆動自在な前車輪1,1と左右一対の駆動自在な後車輪2,2とによって自走する自走車と、この自走車の車体フレーム3の後部にリンク機構Lを介して連結された作業部Sと、自走車の車体後部に配置された肥料タンク71を有する施肥装置Cとを備えて構成してある。
【0023】
自走車は、車体前部に設けたエンジン5を備え、このエンジン5が出力する駆動力を車体前部に位置するミッションケース6に入力し、このミッションケース6に入力した駆動力をミッションケース6の内部に位置する走行ミッションから前輪駆動ケース7に伝達して左右一対の前車輪1,1を駆動し、ミッションケース6に入力したエンジン5からの駆動力を前記走行ミッションから回転軸8を介して車体後部に位置する後輪駆動ケース9に伝達して左右一対の後車輪2,2を駆動する。自走車は、車体後部に位置する運転座席4aを有した運転部4を備え、この運転部4に搭乗して運転するように乗用型になっている。自走車は、前記ミッションケース6に入力したエンジン5からの駆動力を、ミッションケース6の内部に位置する作業ミッションから車体フレーム3の下方に位置する回転軸11と、この回転軸11の後端部から車体後方向きに延出する伝動軸12とを介して作業部Sの駆動機構Dの入力軸42(図3参照)に伝達する。
【0024】
図2は、作業部Sの全体を示す後面図である。図3は、作業部Sの一部を示す側面図である。図4は、作業部Sの一部を示す平面図である。図5は、作業部Sの一部を示す後面図である。これらの図及び図1に示すように、作業部Sは、リンク機構Lにおける後部リンク17の下端部に前端部が連結された作業部フレーム25と、作業部フレーム25の下部に車体横方向に並べて取り付けられた4つの接地フロート20と、作業部フレーム25が備える支持フレーム26に車体横方向に並べて取り付けられた6つの粉粒体供給装置Aと、作業部フレーム25が備える支柱66に取り付けられた薬剤散布装置Bと、作業部フレーム25の前部に装着された左右一対の作溝体F,Fとを備えている。
【0025】
リンク機構Lは、車体フレーム3の後部から後方向きに上下揺動自在に延出する上部リンク15及び下部リンク16と、上部リンク15と下部リンク16の後端部に連結された後部リンク17を備えている。後部リンク17には、作業部フレーム25が連結されており、リンク機構Lは、車体フレーム3と後部リンク17に亘って連結された油圧シリンダ13によって車体フレーム3に対して上下に揺動操作されて、作業部Sを、4つの接地フロート20が圃場に接地した下降作業位置と各接地フロート20が圃場から上昇した上昇非作業位置とに昇降操作する。
【0026】
後部リンク17は、作業部フレーム25を車体前後向きのローリング軸芯Xまわりにローリング自在に支持しており、作業部Sは、自走車の左右傾斜にかかわらず車体横方向で水平状態になるように、自走車に対してローリング軸芯Xまわりにローリングする。
【0027】
作業機は、作業部Sを下降作業位置に下降させて自走車を走行させると、6つの粉粒体供給装置Aによって稲の種籾aを6条供給で圃場に供給する播種作業と、施肥装置Cによって6条の種籾に対する肥料供給を行なう施肥作業と、薬剤散布装置Bによって雑草防止などの薬剤を圃場に散布する薬剤散布作業と、左右一対の作溝体F,Fによって圃場に排水溝を形成する作溝作業を行なう。各粉粒体供給装置Aによって供給される種播aは、接地フロート20の通過によって整地された箇所に供給される。
【0028】
図1,2,4に示すように、左右一対の作溝体F,Fは、後車輪2の通過跡に排水溝を形成するように配置されている。左右一対の作溝体F,Fの前端側は、泥除け板30を介して作業部フレーム25に支持されている。泥除け板30は、後車輪2によって跳ね上げられた泥土を作業部Sの内部に入らないように受け止める。
【0029】
施肥装置Cについて説明する。
図1,2,3,4に示すように、施肥装置Cは、前記肥料タンク71を備える他、この肥料タンク71の下部に連設された肥料繰出し機構73、この肥料繰出し機構73の肥料排出部に送風管76を介して接続された電動ブロワ75を備えて構成してある。肥料繰出し機構73は、車体横方向に並んだ6つの肥料排出口(図示せず)を備えている。肥料繰出し機構73の各肥料排出口は、作業部Sの下部に車体横方向に並べて設けた6つの作溝施肥器77に各別に肥料供給ホース74を介して接続されている。肥料繰出し機構73は、走行トランスミッションからの駆動力を入力軸78によって入力して駆動される。
【0030】
施肥装置Cは、肥料タンク71に貯留された粒状の肥料を肥料繰出し機構73によって肥料タンク71から各肥料排出口(図示せず)に繰出し、各肥料排出口に繰出した肥料を電動ブロワ75によって供給される搬送風によって肥料供給ホース74を介して作溝施肥器77に供給する。図2,3に示すように、6つの作溝施肥器77は、各粉粒体供給装置Aが備える筒状体56のやや横側でかつやや前側に一つずつ位置するように配置してあり、各作溝施肥器77は、粉粒体供給装置Aが筒状体56から圃場に供給する種籾aの横側近くで圃場に溝を形成し、形成した溝に肥料供給ホース74からの肥料を供給する。
【0031】
肥料供給ホース74のうち肥料を後方向きに送る経路から肥料を作溝施肥器77に向けて落下させる経路に切り換わる経路切り換わり箇所に排風部を設け、経路切り換わり箇所で搬送風を排出して作溝施肥器77に搬送風を送らないで肥料だけを送るように構成すると、搬送風が粉粒体供給装置Aの筒状体56に流入することを回避しながら肥料供給を行なうことができる。
【0032】
薬剤散布装置Bについて説明する。
図1,2に示すように、薬剤散布装置Bは、前記支柱66の上端部に散布機ケースが連結された電動散布機62と、電動散布機62の上部に取付けられた薬剤タンク61とを備えて構成してある。電動散布機62は、散布機ケースの内部に駆動回転自在に設けられた繰出し皿63及び回転散布体64を備え、薬剤タンク61に貯留された薬剤を、繰出し皿63及び回転散布体64によって散布機ケースの外部に飛散させて、各粉粒体供給装置Aによって種籾aが供給された後の圃場に散布する。
【0033】
粉粒体供給装置Aについて説明する。
6つの粉粒体供給装置Aは、同じ構造を備えるよう構成されている。図1,2,3,5に示すように、粉粒体供給装置Aは、粉粒体タンク32の底部に形成されたロート部32aに上端部が連結された繰出しケース51、及び繰出しケース51の下端部に装着された筒状体56を備えて構成してある。作業部左側の3つの粉粒体供給装置Aのための粉粒体タンク32及び作業部右側の3つの粉粒体供給装置Aのための粉粒体タンク32のそれぞれは、対応する3つの粉粒体供給装置Aに共用の一つのタンクに構成されている。
【0034】
図7は、粉粒体供給装置Aを示す縦断側面図である。図8は、粉粒体供給装置Aを示す縦断後面図である。これらの図及び図3,5に示すように、繰出しケース51は、作業部フレーム25における支持フレーム26に連結ボルト21によって脱着自在に連結された連結部51dを有した前壁板部51aと、メンテナンス開口108を有した後壁板部51bと、回転体支持部51eを有した左右一対の横壁板部51c,51cとを樹脂素材で一体成形した状態で備えて構成してあり、樹脂製の上下向きの筒状になっており、上側で粉粒体タンク32のロート部32aに連通し、下側で筒状体56に連通している。メンテンナンス開口108は、蓋体107の脱着によって開閉される。
【0035】
図7,8に示すように、繰出しケース51の内部に、繰出し回転体52、繰出し回転体52の上側に繰出し回転体52の周方向に分散させて配置した一対の摺り切り体53,54、一対の摺り切り体53,54のうちの繰出し回転体回転方向下手側に位置する下手側の摺り切り体54のブラシ部54aに対して繰出し回転体回転方向下手側に位置する箇所に繰出し回転体52の周面52sに沿わせた配置した繰出しガイド80、繰出し回転体52の上方に配置した流下案内板57を設けてある。
【0036】
繰出し回転体52は、回転支軸59、及び回転支軸59と左右一対の横壁板部51c,51cの回転体支持部51eの間に介装されたボス部材51fを介して左右一対の横壁板部51c,51cに回転自在に支持されている。繰出し回転体52は、回転支軸59の車体横向き軸芯で成る回転軸芯Pまわりに回転支軸59によって回転方向F(図7参照)に回転駆動される。繰出し回転体52の周面52sに、4つの繰出し凹部58を繰出し回転体52の回転方向Fに所定間隔を隔てて並ぶ配置で設けてある。
【0037】
一対の摺り切り体53,54のうちの繰出し回転体回転方向上手側に位置する上手側の摺り切り体53と繰出しケース51の内側に一体成形した壁体51gとにより、繰出し回転体52の繰出し凹部58に対する種籾供給を行なう供給スペース50を繰出し回転体52の上端側の上方に繰出し回転体52の周面52sに臨ませた状態で形成してある。
【0038】
流下案内板57は、傾斜姿勢の案内面57aを備え、粉粒体タンク32に貯留され、ロート部32aの底部内に装着された格子体45の粉粒体流通孔から流下した種籾aを、案内面57aによって一対の摺り切り体53,54の間には流下しないで供給スペース50に流下するように案内する。
【0039】
図7に示すように、繰出しガイド80は、繰出し回転体52の周面52sに沿って位置する案内面81を備え、繰出し回転体52の繰出し凹部58に入り込んで繰出し回転体52の下端側に設置してある排出箇所Zに移動する種籾aに対して案内面81によって案内作用する。すなわち、繰出しガイド80は、繰出し凹部58が下手側の摺り切り体54のブラシ部54aを通過してから排出箇所Zに至るまでは、繰出し凹部58が横向きや下向きになっても種籾aが繰出し凹部58からこぼれ出ないで繰出し凹部58に滞留し、繰出し凹部58が排出箇所Zに到達して下向きになると、種籾aが繰出し凹部58から落下して排出されるように種籾aに対して案内作用する。
【0040】
図7に示すように、上流側の摺り切り体53は、流下案内板57の下端部に支持されたブラシ支持部53bと、このブラシ支持部53bに植設されたブラシ部53aとを備えて構成してある。下流側の摺り切り体54は、繰出しケース51に回転支軸72を介して支持されるブラシ支持部54bと、このブラシ支持部54bに植設されたブラシ部54aとを備えて構成してある。一対の摺り切り体53,54は、繰出し回転体52の繰出し凹部58に入り込んだ種籾aに対してブラシ部53a,54aによって摺り切り作用する。
【0041】
従って、粉粒体供給装置Aは、回転支軸59の一端部に一体回転自在に設けた駆動ギヤ86に駆動機構Dによって動力伝達されて回転支軸59が回転駆動されることにより、繰出し回転体52を回転支軸59によって回転方向Fに駆動し、粉粒体タンク32に貯留された種籾aを回転する繰出し回転体52によって供給スペース50を介して、繰出し凹部58の容積によって設定される設定量ずつ間欠的に繰出し、繰出し回転体52が繰出した種籾aを圃場に落下させて点播供給の形態で供給する。
【0042】
つまり、粉粒体タンク32に貯留され、ロート部32aに装着された格子体45の粉粒体流通孔から流下した種籾aを、流下案内板57による流下案内によって供給スペース50に流下させて滞留する。繰出し回転体52を回転方向Fに駆動することにより、各繰出し凹部58が供給スペース50と排出箇所Zの間を移動する。繰出し凹部58は、供給スペース50に位置すると、供給スペース50の種籾aを流入させて収容する。種籾aを収容した繰出し凹部58は、上手側及び下手側の摺り切り体53,54のブラシ部53a,54aを通ってブラシ部53a,54aによる摺り切り作用を受け、この後、繰出しガイド80が位置する移動経路を下降移動する。このとき、繰出し凹部58が横向きや下向きになっても、繰出しガイド80の案内面81による種籾aに対する案内作用によって種籾aが繰出し凹部58からこぼれ出ない。繰出し凹部58が排出箇所Zに至ると、繰出し凹部58が下向きになるとともに繰出しガイド80による案内作用が解除され、繰出し凹部58に収容されていた種籾aが繰出し凹部58から筒状体56の内部に落下する。繰出し凹部58から落下した種籾aは、筒状体56が形成している落下経路を、風を受けて分散しないように筒状体56によって風当たり防止されながら落下して、作溝施肥器77よりもやや後側でかつやや横側で圃場に落下する。
【0043】
肥料供給ホース74に送り込まれた搬送風を筒状体56に導入するよう構成すると、電動ブロワ75からの風を種籾供給に活用して繰出し回転体52からの種籾aを圃場に向けて供給することができる。
【0044】
図7に示すように、繰出しガイド80は、案内面81を形成するガイド本体82と、ガイド本体82に対して案内面81が位置する側とは反対側に設けた吸音材83とを備えて構成してある。
【0045】
ガイド本体82は、下流側の摺り切り体54のブラシ保持部54bから下方向きに延出する支持体90の下端部90aに折り曲げ端部82aが連結ねじ91によって連結されたステンレス鋼板によって構成してある。ガイド本体82は、種籾aを繰出し回転体52とガイド本体82との間に入り込み易くする屈曲ガイド部82bを備えている。吸音材83は、ガイド本体82の案内面81を形成する側とは反対側の面に密着させてある。
【0046】
従って、繰出しガイド80では、種籾aが鉄コーティング処理をされた種籾である場合、種籾aと案内面81が擦れ合って発生する音を吸音材83によって減衰させながら種籾aに対する案内作用を行なう。
【0047】
繰出しガイド80は、ガイド本体82の下端側の折り曲げ端部82aで支持体90に支持されていることにより、支持体90に対し、繰出しガイド80の繰出し回転体回転方向上手側が繰出し回転体回転方向下手側に位置する側を揺動支点側にして繰出し回転体52の半径方向に揺動する状態になっている。
【0048】
従って、繰出し凹部58に収容された種籾aは、下流側の摺り切り体54のブラシ部54aを通過した後、繰出しガイド80による案内作用を受ける移動経路に入り、この移動経路を排出箇所Zに向かって移動する。移動経路に入る種籾aは、摺り切り体53,54による摺り切り不良などによって種籾aの一部が繰出し凹部58の外側に突出した嵩高状態になっていても、繰出しガイド80の繰出し回転体回転方向上手側に位置する側であって、揺動支点側とは反対側に位置する側を繰出し回転体52から離れる側に容易に押圧揺動させて、種籾aとガイド本体82の案内面81の擦れ合いを弱い状態に抑制しながら移動経路に入っていく。移動経路を排出箇所Zに向かって移動する種籾aは、ガイド本体82による押圧作用が徐々に強くなる状態でのガイド本体82による案内作用を受けて嵩高状態を解消しながら移動する。
【0049】
支持体90は、板金部材によって構成されていて、摺り切り体54のブラシ支持部54bに連結されている部位を揺動支点にして繰出し回転体52の半径方向に揺動しやすくなっており、繰出しガイド80は、支持体90の揺動変形によっても、ガイド本体82と繰出し回転体52による種籾aの挟持力の増大を防止して、種籾aと案内面81の擦れ合いを弱くなるように抑制する。
【0050】
下流側の摺り切り体54は、回転支軸72を介して繰出しケース51に揺動操作自在に支持されている。繰出しケース51の外部に配置して回転支軸72の端部に取り付けてある開閉レバー100によって回転支軸72が回転操作されることにより、摺り切り体54及び繰出しガイド80は、開放姿勢に切換えられて繰出し回転体52の外周側に排出経路を形成し、粉粒体タンク32に残留した種籾aを排出経路から筒状体56の内部に排出することができる。
【0051】
図7,8に示すうように、流下案内板57は、流下案内板57と繰出しケース51にわたって設けた連結手段95によって繰出しケース51の内部に脱着自在に取り付けられている。連結手段95は、繰出しケース51の内部にロッドを設置して設けた支持体96と、流下案内板57に一体成形した連結フック97を備えて構成してある。
【0052】
図8に示すように、繰出し回転体52は、4つの繰出し凹部58が設けられた繰出し回転体本体52aと、4つの繰出し凹部58に各別に係入する4つの容量調整バー58aが設けられた容量調整体52bとを備えて構成してある。容量調整体52bの内周側に設けてある操作ネジ部が、回転支軸59に相対回転自在に外嵌している調整筒軸59aの外周側に設けた送りネジ部59bに係合している。容量調整体52bは、繰出しケース51の外部に配置して調整筒軸59aの端部に一体回転自在に設けてある調節ダイヤル59cよって調節筒軸59aが回転操作されることにより、送りネジ部59bによる送り作用によって繰出し回転体本体52aに対して移動操作されて各容量調整バー58aを繰出し凹部58に対して出退させ、各容量調整バー58aの繰出し凹部58に対する入り込み長さを変更する。これにより、繰出し回転体52の各繰出し凹部58の容量が変更され、繰出し回転体52による種籾aの繰出し量を変更できる。
【0053】
図7,8,9に示すように、筒状体56は、筒状体56の上端側の両横外側に設けた連結突起111と、連結突起111に係脱するように構成して繰出しケース51の両横外側に揺動操作自在に設けた連結フック112とによって繰出しケース51に脱着自在に連結されている。
【0054】
図5,7,9に示すように、筒状体56の下部に車体後方向きの後方向き開口56aを形成してあり、作業部Sの後方から後方向き開口56aを介して筒状体56の内部を見通して、種籾aの供給が行なわれているか否かを判断することができる。
【0055】
図2〜12に示すように、作業部Sの下方に作業部横方向(車体横方向)に並ぶ6つの作溝器115及び作溝器115の後方で作業部横方向に並ぶ6つの覆土体116の脱着を行ない、装着状態の覆土体116の姿勢変更を行なうことにより、粉粒体供給装置Aによる種籾供給を行なう作業部Sの作業形態として第1作業形態と第2作業形態と第3作業形態を現出できるように構成してある。
【0056】
すなわち、図2,4に示すように、6つの作溝器115及び6つの覆土体116のうちの作業部左側(車体左側)の3つの粉粒体供給装置Aに対応させる3つの作溝器115及び3つの覆土体116は、左用の支持フレーム120に支持されており、6つの作溝器115及び6つの覆土体116のうちの作業部右側(車体右側)の3つの粉粒体供給装置Aに対応させる3つの作溝器115及び3つの覆土体116は、左用の支持フレーム120とは別体の支持フレームに構成された右用の支持フレーム120に支持されている。
【0057】
左用の支持フレーム120では、覆土調整レバー130を左端部に配置されて支持しており、右用の支持フレーム120では、覆土調整レバー130を右端部に配置されて支持しており、左用の支持フレーム120と右用の支持フレーム120とは、覆土調整レバー130の配置箇所の点において相違しているが、その他の点において同じ構造を備えている。
【0058】
図13は、左用の支持フレーム120を示す斜視図である。この図及び図4に示すように、左用及び右用の支持フレーム120は、3つの作溝器115を支持する作業部前後方向(車体前後方向)の前部フレーム121と、前部フレーム121の後方に所定間隔を隔てて位置して3つの覆土体116を支持する作業部横向き(車体横向き)の後部フレーム122と、前部フレーム121及び後部フレーム122の両端側で前部フレーム121と後部フレーム122を連結する作業部前後向き(車体前後向き)の連結フレーム123とを備えて構成してある。
【0059】
図15は、支持フレーム120の連結構造を示す側面図である。この図及び図4に示すように、支持フレーム120は、前部フレーム121の長手方向での2箇所にメネジ筒124aが設けられている連結部124を備えている。
【0060】
図12,13,15に示すように、作業部フレーム25を、作業部横向き(車体横向き)のメインフレーム25Aと、メインフレーム25Aの作業部横方向での複数箇所から後方向きに延出するフロート支持フレーム25Bと備えて構成し、各フロート支持フレーム25Bの後部にブラケットを取り付けて支持フレーム120のための支持部25aを形成してある。
【0061】
図14,17に示すように、各作溝器115は、前部フレーム121に連結部115aで連結された先細り形状の作溝器本体115bと、作溝器本体115bの背面に連結された接続部115cとを備えて構成してある。接続部115cは、作業部上下方向視(車体上下方向視)で後方向きに開口する溝形に形成してあり、筒状体56の内部の後向き開口56aを開口115dによって開いた状態にしながら筒状体56に連通する。
【0062】
図13に示すように、各覆土体116は、覆土体116の前端部が後部フレーム122にブラケットを取り付けて設けた支持部122aに連結されることにより、後部フレーム122に支持されている。後部フレーム122の両端部は、連結フレーム123の後端部に形成された支持部123aに回転自在に枢支されている。図13,15,16に示すように、後部フレーム122は、後部フレーム122の作業部横外側に位置する側の端部に一体回転自在に設けた揺動アーム136を備えた連動機構135を介して覆土調節レバー130に連動されている。
【0063】
覆土調節レバー130は、連結フレーム123の支持部123aに回転自在に支持された支持筒137に外嵌されたコイル部130aを備えたバネ鋼線材によって構成してある。覆土調節レバー130は、抜け止めピン137a(図16参照)によって外れ止めされている。図15,16に示すように、後部フレーム122と覆土調節レバー130を連動させる連動機構135は、後部フレーム122に一体回転自在に設けた揺動アーム136と、揺動アーム136に支持された連動ピン136aと、この連動ピン136aが係入する出力孔138aを備えた状態で支持筒137に一体回転自在に設けた揺動リンク138と、揺動リンク138に設けた入力孔138bに係入するように構成して覆土調節レバー130に備えてある連動アーム130bとを備えて構成してある。支持筒137は、図16に示す如く抜け止めピン137aと位置決めピン137bがコイル部130a及び支持部123aを挟んでいることにより、支持部123aに対する所定の取り付け位置に位置決めされている。
【0064】
従って、後部フレーム122は、覆土調節レバー130が後部フレーム122の軸芯まわりにレバーガイド140のガイド溝141に沿わせて揺動操作されることにより、揺動アーム136、連動ピン136a、揺動リンク138を介して覆土調節レバー130によって回転操作されて覆土体116を後部フレーム122の軸芯まわりに上下揺動させる。すなわち、覆土調節レバー130をガイド溝141に沿わせて揺動操作することにより、覆土体116を図17に実線で示す作用状態としての下降使用の取り付け姿勢116Dと、図17に二点差線で示す第1の解除状態としての上昇格納の取り付け姿勢116Uとに変更できる。覆土体116を第1の解除状態に操作した場合、覆土調節レバー130をレバーガイド141の一端側に形成された格納凹部142に係止させることにより、覆土板116を第1の解除状態の取り付け姿勢116Uに保持できる。覆土板116を作用状態に操作した場合、レバーガイド140を連結フレーム123に連結する一対の連結ボルトの一方の連結ボルトで成るストッパー143が揺動リンク138を受け止め支持し、揺動リンク138がストッパー143に当接してからも、覆土調節レバー130をガイド溝141に沿わせてレバーガイド140の他端側に向けて揺動操作してレバーガイド140に覆土調節レバー130の移動方向に並べて形成された複数個の使用凹部144のうちの一つに係止させることにより、覆土調節レバー130を弾性変形状態に保持でき、覆土調節レバー130の弾性復元力を、覆土体116を土圧に抗して下降付勢する操作力として覆土体116に作用させることができる。複数個の使用凹部144のうちの格納凹部142からの距離がより大となるものを選択して使用することにより、覆土調節レバー130の弾性変形量をより大にして、覆土体116に作用する下降付勢力をより大にできる。
【0065】
図2,3,4は、作業部Sの第1作業形態を現出された状態を示している。これらの図に示すように、カルパーコーティング処理が施された種籾aあるいはコーティング処理が施されていない種籾aを圃場に供給する播種作業を行なう場合、左用の支持フレーム120を前部フレーム121で作業部フレーム25の左側2箇所の支持部25a,25aに連結し、右用の支持フレーム120を前部フレーム122で作業部フレーム25の右側2箇所の支持部25a,25aに連結することにより、6つの作溝器115を各粉粒体供給装置Aの下方に一つずつ位置し、かつ接続部115cが筒状体56の下端部に外嵌する取り付け状態で作業部Sに取り付けることができて、6つの作溝器115が作用状態になる。そして、6つの覆土体116を各作溝器115の後方に一つずつ位置する取り付け状態で作業部Sに装着することができ、左用及び右用の支持フレーム120に装着してある覆土調節レバー130をガイド溝141の他端側(後方側)に揺動操作して複数個の使用凹部144のいずれか一つに係止させることにより、6つの覆土体116が作用状態になり、作業部Sは、第1作業形態を現出された状態になる。第1作業形態を現出された作業部Sは、6つの作溝器115によって圃場に6条の溝を形成し、形成した6条の溝のそれぞれに粉粒体供給装置Aによって種籾aを落下させて供給し、種籾aを供給した後の溝に覆土体116によって土寄せして種籾aを埋める。
【0066】
図9は、作業部Sの第2作業形態を現出された状態での側面図である。図10は、作業部Sの第2作業形態を現出された状態での平面図である。これらの図に示すように、鉄コーティング処理が施された種籾aを圃場に供給する播種作業を行なう場合、カルパーコーティング処理が施された種籾aあるいはコーティング処理が施されていない種籾aの播種作業を行なう場合と同様に、左用及び右用の支持フレーム120を作業部フレーム25に連結することにより、6つの作溝器115を各粉粒体供給装置Aの下方に一つずつ位置し、かつ接続部115cが筒状体56の下端部に外嵌する取り付け状態で作業部Sに取り付けることができ、6つの作溝器115が作用状態なる。そして、左用及び右用の支持フレーム120に装着してある覆土調節レバー130をガイド溝144の一端側(前方側)に揺動操作して格納凹部142に係止させることにより、6つの覆土体116が第1の解除状態になり、作業部Sは、第2作業形態を現出された状態になる。第2作業形態を現出された作業部Sは、6つの作溝器115によって圃場に6条の溝を形成し、形成した6条の溝のそれぞれに粉粒体供給装置Aによって種籾aを落下させて供給し、種籾aを供給した後の溝には覆土体116による土寄せを行なわず、種籾aを強い風があっても溝から出ないで所定の供給箇所から位置ずれしないように、かつ空気に触れるように溝内に露出した状態にする。
【0067】
図11は、作業部Sの第3作業形態を現出された状態での側面図である。図12は、作業部Sの第3作業形態を現出された状態での平面図である。これらの図に示すように、鉄コーティング処理が施された種籾aを圃場に供給する播種作業を行なう場合、左用及び右用の支持フレーム120を作業部フレーム25から取り外すことにより、6つの作溝器115を取り外すことができて、6つの作溝器115が解除状態になり、6つの覆土体116を取り外すことができて、6つの覆土体116が第2の解除状態になり、作業部Sは、第3作業形態を現出された状態になる。第3作業形態を現出された作業部Sは、6つの粉粒体供給装置Aによって圃場面に種籾aを供給し、供給した種籾aを空気や太陽光に触れやすいように圃場面に露出した状態にする。
【0068】
図4及び図17に示すように、作溝器115及び覆土体116を作業部Sに取り付けた状態では、支持フレーム120における前部フレーム121が粉粒体供給装置Aの筒状体56の前付近を作業部横方向に通る状態になり、支持フレーム120における後部フレーム122が粉粒体供給装置Aの筒状体56の後付近を作業部横方向に通る状態になり、前部フレーム121及び後部フレーム122は、筒状体56に対するガードになる。
【0069】
図13,15に示すように、作業部フレーム25の支持部25aに連結ボルト125が装着されるよう設けた取付け孔27を作業部上下方向に長い形状に形成して調節孔としてあり、支持フレーム120の作業部フレーム25に対する連結位置を取付け孔27の形状の作用によって作業部上下方向に変更調節して、作溝器115を筒状体56に対して昇降調節することができ、筒状体56の対地高さを変更せずに、作溝器115によって形成される溝の深さを変更できるようになっている。筒状体56に対する作溝器115の昇降調節を行なうと、覆土体116が作溝器115と共に昇降し、作溝器115によって形成される溝の深さ変更にかかわらず、覆土体116は、昇降調節された作溝器115が形成する溝の深さに適応した適切な作用深さで土寄せを行なう。
【0070】
図14は、支持フレーム120における後部フレーム122の筒状体56の後側を開放した状態での斜視図である。この図に示すように、後部フレーム122の端部に装着される抜け止めピン127を取り外すことにより、後部フレーム122を連結フレーム123に対して覆土調節レバー130が位置する側とは反対側にスライド操作できる。後部フレーム122をこのようにスライド操作すれば、後部フレーム122が覆土調節レバー130を装着してある側の連結フレーム123の支持部123a及び支持筒137から抜け外れ、かつ連動アーム136の連結ピン136aが揺動リンク138から抜け外れる。覆土調節レバー130が位置する側の連結フレーム123及び揺動リンク138から抜け外れた後部フレーム122を、覆土調節レバー130が位置する側にスライド操作すれば、覆土調節レバー130が位置する側とは反対側の連結フレーム123から抜け外れ、作業部フレーム25に連結された状態の支持フレーム120のうちの後部フレーム122のみを取り外すことができる。
【0071】
図18は、筒状体56の後側を開放した状態を示す側面図である。この図及び図14に示すように、支持フレーム120における後部フレーム122は、支持フレーム120から取り外されることにより、筒状体56の後側を開放するメンテナンス状態になり、作溝器115を作業部Sに取り付けたままにしても、筒状体56を繰出しケース51の後方から繰出しケース51に対して脱着することができる。
【0072】
図3,7,8に示すように、筒状体56の前側縁56bを、作業部側面視で筒状体56の下端に近づくほど後側に位置する傾斜縁に形成し、筒状体56の後向き開口56aが位置している下部56cを、前後方向視で下細り形状に形成することにより、作溝施肥器77から排出される肥料搬送風が筒状体56に下向き開口から流入することを防止するように、筒状体56の下向き開口を作溝施肥器77に対して極力後方及び横側に離間させてある。
【0073】
〔別実施例〕
図19は、作業形態を切換えるための別の実施構造を備えた作業部Sの一部を示す斜視図である。この図に示すように、別の実施構造を備えた作業部Sにあっては、作業部フレーム20の各支持部25aに、長孔形の取付け孔27の上方に配置した取付け孔28を設けてある。
【0074】
各支持部25aの取付け孔27は、支持フレーム120の取り付け高さを変更して作溝器115及び覆土体116の作用状態での取り付け高さを変更調節する調節孔を構成するものである。
【0075】
取付け孔28は、支持フレーム120における前部フレーム121が取付け孔27から付け替えられることにより、作溝器115を圃場面から浮上して溝形成を行わない取り付け高さ、すなわち解除状態に切換える。
尚、取付け孔28の配置高さとしては、覆土調節レバー130が使用凹部144に係止されても覆土体116が実際には解除状態となる配置高さに設定してもよく、また覆土調節レバー130が格納凹部142に係止されることによって覆土体116が解除状態となる配置高さに設定してもよい。
【0076】
取付け孔28と取付け孔27を一連の長孔によって構成して、取付け孔27の上部に前部フレーム121を取り付けることで作溝器115の解除状態を現出するように構成してよい。この場合、高さ調節しようとする作溝器115を上げ過ぎてしまう誤操作が行なわれる虞がある。これに対し、作溝器115を解除状態に切換える取付け孔28と、作溝器115の作用状態での高さ変更を行なう取付け孔27とを、離れて位置する別孔によって構成してあるから、上記した誤操作を行なわれることがない。
【0077】
〔別の実施形態〕
(1)上記した実施例では、作溝器115を粉粒体供給装置Aの筒状体56の直下に位置する箇所で溝を形成するよう構成した例を示したが、粉粒体供給装置Aの筒状体56よりも前方に位置する箇所で圃場に溝を形成するよう構成して実施してもよい。
【0078】
(2)上記した実施例では、左用の作溝器115及び覆土体116と、右用の作溝器115及び覆土体116とを別々に脱着するよう構成した例を示したが、左用の作溝器115及び覆土体116と右用の作溝器115及び覆土体116を、共用の支持フレームに支持させて一挙に脱着するよう構成して実施してもよい。また、全ての作溝器115を別々に脱着して作用状態と解除状態に切換えるように構成して実施してもよい。各作溝器115を前部フレーム121に作用状態と解除状態に付け替えるよう構成して実施してもよい。各作溝器115を前部フレーム121に対して作用状態と解除状態に横軸芯まわりで切り換わるように揺動及び固定自在に取り付けて、あるいは上下移動で切り換わるようにスライド及び固定自在に取り付けて実施してもよい。全ての覆土体116を後部フレーム122に対して個々に上下揺動あるいは上下スライド操作して作用状態と解除状態に切換えるように構成して実施してもよい。
【0079】
(3)上記した実施例では、6条供給の形態で種籾aの供給を行なう例を示したが、4条供給や8条供給など、6条以外の条数での供給形態で種籾aを供給するように構成して実施してもよい。
【産業上の利用可能性】
【0080】
本発明は、種籾などの種子の他、肥料、薬剤など、種子以外の粉粒体を供給する作業機にも利用できる。
【符号の説明】
【0081】
32 粉粒体タンク
52 繰出し回転体
56 筒状体
56a 筒状体の後向き開口
115 作溝器
116 覆土体
120 支持フレーム
121 前部フレーム
122 後部フレーム
123 連結フレーム
A 粉粒体供給装置
【特許請求の範囲】
【請求項1】
粉粒体タンクに貯留された粉粒体を駆動回転自在な繰出し回転体によって繰出し、前記繰出し回転体が繰出した粉粒体を筒状体が形成している落下供給路を介して圃場に供給する粉粒体供給装置が備えられた作業部を車体後部に連結された作業機であって、
前記粉粒体供給装置によって供給される粉粒体を落下させる溝を圃場に形成する作溝器が作用状態になり、かつ粉粒体が落下した溝に土寄せ作用する覆土体が作用状態になった第1作業形態と、前記作溝器が作用状態になり、かつ前記覆土体が解除状態になった第2作業形態と、前記作溝器及び前記覆土体が解除状態になった第3作業形態とを現出自在に構成してある作業機。
【請求項2】
前記作溝器を、前記筒状体に対して昇降調節自在に連通させてある請求項1記載の作業機。
【請求項3】
前記作溝器及び前記覆土体を支持する支持フレームを、前記筒状体の前付近を作業部横方向に通って前記作溝器を支持する前部フレームと、前記筒状体の後付近を作業部横方向に通って前記覆土体を支持する後部フレームと、前記前部フレームと前記後部フレームを連結する連結フレームとを備えて構成してある請求項1又は2記載の作業機。
【請求項4】
前記後部フレームを、前記筒状体の後側を開放するメンテナンス状態に切換え自在に構成してある請求項3記載の作業機。
【請求項5】
前記筒状体に後方向き開口を設けてある請求項1〜4のいずれか一項に記載の作業機。
【請求項1】
粉粒体タンクに貯留された粉粒体を駆動回転自在な繰出し回転体によって繰出し、前記繰出し回転体が繰出した粉粒体を筒状体が形成している落下供給路を介して圃場に供給する粉粒体供給装置が備えられた作業部を車体後部に連結された作業機であって、
前記粉粒体供給装置によって供給される粉粒体を落下させる溝を圃場に形成する作溝器が作用状態になり、かつ粉粒体が落下した溝に土寄せ作用する覆土体が作用状態になった第1作業形態と、前記作溝器が作用状態になり、かつ前記覆土体が解除状態になった第2作業形態と、前記作溝器及び前記覆土体が解除状態になった第3作業形態とを現出自在に構成してある作業機。
【請求項2】
前記作溝器を、前記筒状体に対して昇降調節自在に連通させてある請求項1記載の作業機。
【請求項3】
前記作溝器及び前記覆土体を支持する支持フレームを、前記筒状体の前付近を作業部横方向に通って前記作溝器を支持する前部フレームと、前記筒状体の後付近を作業部横方向に通って前記覆土体を支持する後部フレームと、前記前部フレームと前記後部フレームを連結する連結フレームとを備えて構成してある請求項1又は2記載の作業機。
【請求項4】
前記後部フレームを、前記筒状体の後側を開放するメンテナンス状態に切換え自在に構成してある請求項3記載の作業機。
【請求項5】
前記筒状体に後方向き開口を設けてある請求項1〜4のいずれか一項に記載の作業機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2012−90527(P2012−90527A)
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願番号】特願2010−237926(P2010−237926)
【出願日】平成22年10月22日(2010.10.22)
【出願人】(000001052)株式会社クボタ (4,415)
【出願人】(599118768)株式会社斎藤農機製作所 (47)
【Fターム(参考)】
【公開日】平成24年5月17日(2012.5.17)
【国際特許分類】
【出願日】平成22年10月22日(2010.10.22)
【出願人】(000001052)株式会社クボタ (4,415)
【出願人】(599118768)株式会社斎藤農機製作所 (47)
【Fターム(参考)】
[ Back to top ]