
作業用走行車
【課題】後進時のクラッチ操作方式をデッドマンクラッチ方式に切換えることを可能にすると共に、後進牽制の有無を選択的に切換えることにより、後進時でもクラッチレバーを入位置に保つことができるようにする。
【解決手段】エンジンの動力をトランスミッションケースに内装した主変速機構を介して車輪に伝動する走行動力伝動経路と、該走行動力伝動経路中に介設される走行クラッチ機構15と、該走行クラッチ機構15を入・切操作するクラッチレバーとを備える歩行型耕耘機において、主変速機構が後進操作されたとき、クラッチレバーの入操作を牽制する後進牽制機構22と、該後進牽制機構22による牽制の有無を選択的に切換える連結ピン29とをトランスミッションケース4の近傍に設ける。
【解決手段】エンジンの動力をトランスミッションケースに内装した主変速機構を介して車輪に伝動する走行動力伝動経路と、該走行動力伝動経路中に介設される走行クラッチ機構15と、該走行クラッチ機構15を入・切操作するクラッチレバーとを備える歩行型耕耘機において、主変速機構が後進操作されたとき、クラッチレバーの入操作を牽制する後進牽制機構22と、該後進牽制機構22による牽制の有無を選択的に切換える連結ピン29とをトランスミッションケース4の近傍に設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、歩行型耕耘機等の作業用走行車の技術分野に属するものである。
【背景技術】
【0002】
一般に、この種歩行型耕耘機等の作業用走行車は、エンジン動力を走行変速機構を介して走行部に伝動する走行動力伝動経路と、該走行動力伝動経路中に介設される走行クラッチ機構と、該走行クラッチ機構を入・切操作するクラッチレバーとを備えており、該クラッチレバーの入・切操作に基づいて機体の発進操作や走行停止操作が行われる。このような作業用走行車においては、走行時の操作性を考慮し、クラッチレバーが入位置で保持されるようになっており、例えばバネの支点越え作用を利用してクラッチレバーを入位置に保持するものがある。
【発明の概要】
【発明が解決しようとする課題】
【0003】
しかしながら上記従来の作業用走行車では、走行変速機構が後進操作されたときであっても、クラッチレバーを入操作すると、前進操作時と同様にクラッチレバーが入位置に保持されるため、直ちに走行を停止させたい状況であっても、クラッチレバーから手を離すだけでは停止せず、クラッチレバーを意識的に切操作する必要があった。
【課題を解決するための手段】
【0004】
本発明は、上記の如き実情に鑑みこれらの課題を解決することを目的として創作されたものであって、エンジン動力をトランスミッションケースに内装した走行変速機構を介して走行部に伝動する走行動力伝動経路と、該走行動力伝動経路中に介設される走行クラッチ機構と、該走行クラッチ機構を入・切操作するクラッチレバーとを備える作業用走行車であって、該作業用走行車に、前記走行変速機構が後進操作されたとき、クラッチレバーの入操作を牽制する後進牽制手段と、該後進牽制手段による牽制の有無を選択的に切換える牽制切換手段とをトランスミッションケースの近傍に設けたことを特徴とする。つまり、走行変速機構が後進操作されたとき、クラッチレバーの入操作を牽制することができるため、例えばクラッチレバーの支点越えを牽制することによって、後進時のクラッチ操作方式をデッドマンクラッチ方式に切換えることが可能になり、その結果、直ちに走行を停止させたい状況においては、クラッチレバーから手を離すだけで走行を停止させることができる。しかも、後進牽制の有無を選択的に切換えることができるため、後進しながら作業を行う場合には、クラッチレバーを入位置に保つことができる。
【図面の簡単な説明】
【0005】
【図1】歩行型耕耘機の斜視図である。
【図2】主変速レバーを示す要部側面図である。
【図3】図2のA矢視図である。
【図4】図2のB矢視図である。
【図5】主変速シフタ軸を示す平面図である。
【図6】クラッチレバー切状態を示す走行クラッチ機構および後進牽制機構の側面図である。
【図7】同上要部平面図である。
【図8】(A)は後進牽制有りの状態を示す後進牽制機構の断面図、(B)は後進牽制無しの状態を示す後進牽制機構の断面図である。
【図9】後進牽制無しでクラッチレバーを入操作した状態を示す後進牽制機構の側面図である。
【図10】同上要部平面図である。
【図11】後進牽制有りでクラッチレバーを入操作した状態を示す後進牽制機構の側面図である。
【図12】同上要部平面図である。
【図13】第二実施形態におけるクラッチレバー切状態を示す走行クラッチ機構および後進牽制機構の側面図である。
【図14】同上要部平面図である。
【図15】第二実施形態において後進牽制無しでクラッチレバーを入操作した状態を示す後進牽制機構の側面図である。
【図16】同上要部平面図である。
【図17】第二実施形態において後進牽制有りでクラッチレバーを入操作した状態を示す後進牽制機構の側面図である。
【図18】同上要部平面図である。
【発明を実施するための形態】
【0006】
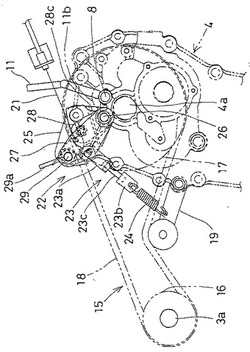
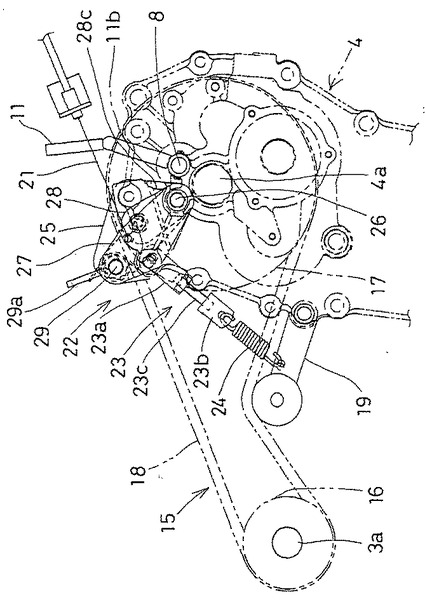
次に、本発明の一実施形態を図面に基づいて説明する。図面において、1は歩行型耕耘機であって、該歩行型耕耘機1は、前後方向を向く機体フレーム2と、該機体フレーム2に搭載されるエンジン3と、該エンジン3の動力を変速するトランスミッションケース4と、該トランスミッションケース4の下端部に車軸(図示せず)を介して取付けられる左右一対の車輪5と、機体フレーム2の後部に装着されるロータリ耕耘装置6と、機体フレーム2の後部から延出するハンドルフレーム7とを備えて構成される。
【0007】
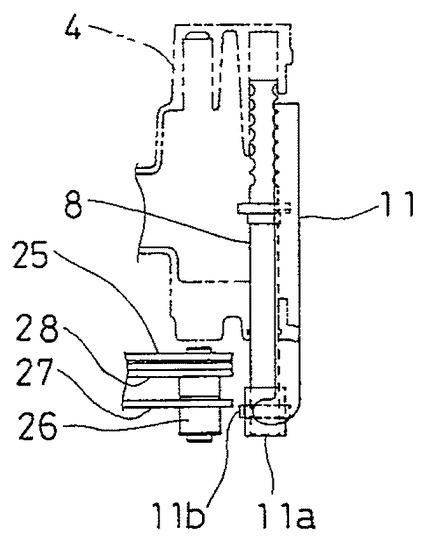
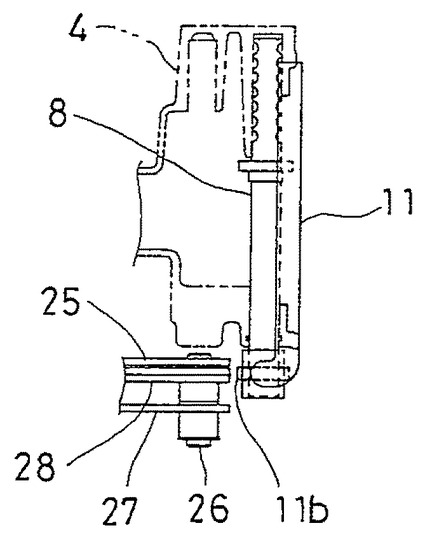
トランスミッションケース4には、走行動力を変速する主変速機構(図示せず)が内装される。主変速機構は、トランスミッションケース4に左右方向スライド自在に組み込まれる主変速シフタ軸8のスライド操作に応じて変速作動するように構成されており、該主変速シフタ軸8は、その外周部に複数形成される位置決め溝8aと、バネ9aで付勢された位置決めボール9との係合によって各変速位置に保持される。
【0008】
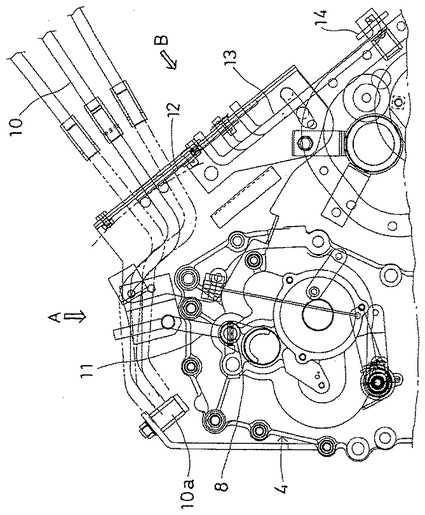
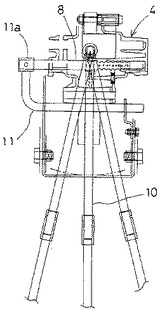
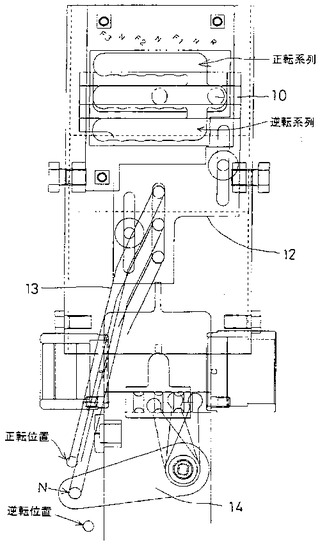
トランスミッションケース4の上方には、主変速機構を変速操作するための主変速レバー10が設けられる。主変速レバー10は、レバー軸10aを支点として左右回動自在に支持されており、その基端部はシフトアーム11に連繋される。シフトアーム11は、基端部に連結ボス11aを備えるL字状のアーム部材であり、トランスミッションケース4の一側部から突出した前記主変速シフタ軸8の一端部に一体的に連結される。これにより、主変速レバー10の左右操作に応じて主変速シフタ軸8が左右にスライドし、主変速機構が変速作動される。因みに、本実施形態の主変速レバー10は、さらに前後操作自在に支持されると共に、スライドプレート12および連結ロッド13を介してロータリ正逆転切換機構(図示せず)の切換アーム14に連繋されており、主変速レバー10の前後操作に応じた切換アーム14の前後回動により、ロータリ正逆転切換機構が切換作動される。
【0009】
エンジン3とトランスミッションケース4との間には、走行クラッチ機構15が介設される。走行クラッチ機構15は、エンジン3の出力軸3aに設けられる出力プーリ16と、トランスミッションケース4の入力軸4aに設けられる入力プーリ17と、両プーリ16、17間に懸回される伝動ベルト18と、該伝動ベルト18を緊張・弛緩させるテンションアーム19とを備えており、該テンションアーム19の操作に応じて両プーリ16、17間の動力伝動を入・切するベルトテンションクラッチ機構を構成する。
【0010】
ハンドルフレーム7には、前後操作自在なクラッチレバー20が設けられている。クラッチレバー20は、クラッチワイヤ21等を介してテンションアーム19に連結されており、クラッチレバー20が後方位置にあるときは、クラッチワイヤ21が緩み、走行クラッチ機構15が切状態に保たれる。一方、クラッチレバー20を前側に倒し操作すると、クラッチワイヤ21が引かれ、走行クラッチ機構15が入状態に切り換えられる。このとき、クラッチワイヤ21を介してクラッチレバー20に作用する引張荷重は、クラッチレバー20の支軸20aを支点越えし、クラッチレバー20を入位置に保持する。
【0011】
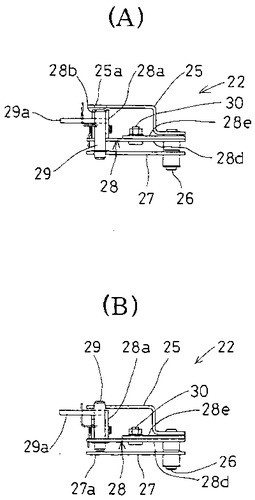
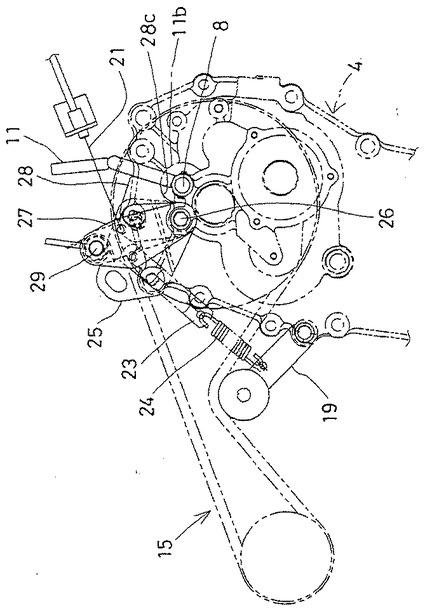
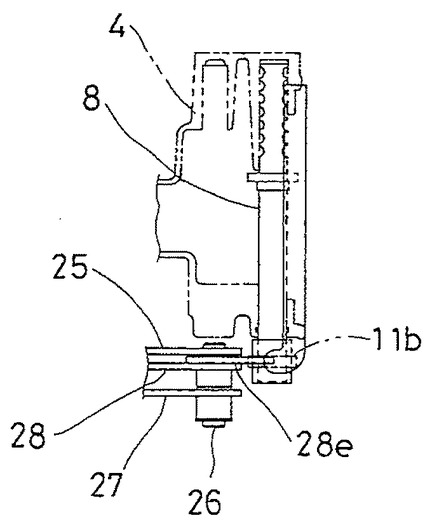
クラッチワイヤ21は、後進牽制機構22、連結プレート23およびテンションバネ24を介してテンションアーム19に連結される。後進牽制機構22は、トランスミッションケース4の側面部に設けられるブラケット25と、該ブラケット25から外側方に突出するアーム支軸26と、該アーム支軸26に前後回動自在に設けられる作動アーム27と、前記アーム支軸26に前後回動自在に設けられ、作動アーム27とブラケット25との間に介在するストッパアーム28と、該ストッパアーム28に左右スライド自在に設けられる連結ピン29とを備えて構成される。
【0012】
作動アーム27は、クラッチワイヤ21を介してクラッチレバー20に連結されると共に、連結プレート23およびテンションバネ24を介してテンションアーム19に連結されており、クラッチレバー20の操作に応じて回動する。ストッパアーム28は、その先端部に設けられるボス28aで連結ピン29を左右スライド自在に支持する。ボス28aには、平面視凵字状のガイド孔28bが形成されており、連結ピン29に一体的に設けられる切換レバー29aがガイド孔28bを介して上方に突出する。連結ピン29は、切換レバー29aのガイド孔28bに沿った左右操作に応じてスライドし、右側スライド位置(後進牽制無し)では、ブラケット25に形成される係合孔25aに係合する一方、左側スライド位置(後進牽制有り)では、作動アーム27に形成される係合孔27aに係合する。これにより、ストッパアーム28を作動アーム27に選択的に連結することが可能になる。また、ガイド孔28bは、左右両端部に係止溝(図示せず)を有し、該係止溝に切換レバー29aを弾圧状に係合させることにより、連結ピン29が各スライド位置に保持される。
【0013】
次に、後進牽制機構22の作用を図面に沿って説明する。図9は、後進牽制無しでクラッチレバーを入操作した状態を示す後進牽制機構の側面図、図10は、同上要部平面図である。これらの図に示すように、連結ピン29をブラケット25側に係合させた状態でクラッチレバー20を入操作すると、クラッチワイヤ21に引かれて作動アーム27が単独で回動する。この状態では、主変速シフタ軸8のスライド位置に拘わらず、作動アーム27の自由な回動が許容され、クラッチレバー20は、前記支点越えによって入位置に保持される。
【0014】
図11は、後進牽制有りでクラッチレバーを入操作した状態を示す後進牽制機構の側面図、図12は、同上要部平面図である。これらの図に示すように、連結ピン29を作動アーム27側に係合させた状態でクラッチレバー20を入操作すると、クラッチワイヤ21に引かれて作動アーム27およびストッパアーム28が一体的に回動する。ここで、主変速シフタ軸8が後進(R)以外の位置にある場合は、作動アーム27の自由な回動が許容され、クラッチレバー20は、前記支点越えによって入位置に保持される。一方、主変速シフタ軸8が後進位置にある場合は、シフトアーム11の連結ボス11aに形成される牽制凸部11bの左右位置が、ストッパアーム28の左右位置に一致する。この状態でクラッチレバー20を入操作すると、ストッパアーム28の後端部に形成される接当凹部28cが牽制凸部11bに接当し、ストッパアーム28の回動が所定の位置で牽制される。これにより、クラッチレバー20は、前記支点越え位置の手前で入操作が牽制され、入位置でのレバー固定が禁止される。つまり、後進牽制機構22は、走行変速機構が後進状態のとき、クラッチレバー20の入操作における支点越えを牽制し、クラッチ操作方式をデッドマンクラッチ方式に切換えることを可能にする。
【0015】
ところで、本実施形態のストッパアーム28は、連結ピン29を支持する第1ストッパアーム28dと、接当凹部28cが形成される第2ストッパアーム28eとに分割されており、それぞれがアーム支軸26に回動自在に支持されている。両ストッパアーム28d、28eは、ボルト30によって一体的に連結されるが、第2ストッパアーム28eのボルト挿通孔(図示せず)は、アーム支軸26を中心とする円弧状の長孔であり、第1ストッパアーム28dに対する第2ストッパアーム28eの位置調整が許容される。これにより、組立誤差、加工誤差、ワイヤ変形等に拘わらず、クラッチレバー20の牽制位置を適正に保ち、後進牽制機構22を有効に機能させることが可能になる。
【0016】
また、本実施形態の連結プレート23は、第1連結プレート23aと第2連結プレート23bとに分割され、長さ調整ボルト23cを介して連結されている。長さ調整ボルト23cは、第2連結プレート23bに螺入し、その回し操作に応じて第2連結プレート23bを進退移動させることにより、連結プレート23の長さを調整する。これにより、走行クラッチ機構15のテンション調整が可能になり、伝動ベルト18の伸び変形等に起因するテンション不良に対応できる許りでなく、適正なテンション調整によって後進牽制機構22を有効に機能させることが可能になる。
【0017】
叙述の如く構成されたものにおいて、エンジン3の動力を主変速機構(走行変速機構)を介して車輪5(走行部)に伝動する走行動力伝動経路と、該走行動力伝動経路中に介設される走行クラッチ機構15と、該走行クラッチ機構15を入・切操作するクラッチレバー20とを備える歩行型耕耘機1であって、該歩行型耕耘機に、前記主変速機構が後進操作されたとき、クラッチレバー20の入操作を牽制する後進牽制機構22と、該後進牽制機構22による牽制の有無を選択的に切換える連結ピン29とを設けたため、主変速機構が後進操作されたとき、クラッチレバー20の入操作を牽制できる。連結ピン29の操作で後進牽制の有無を選択的に切換えることができるため、後進しながら作業を行う場合には、クラッチレバー20を入位置に保つことができる。
【0018】
また、前記クラッチレバー20は、ベルトテンション方式の走行クラッチ機構15をクラッチワイヤ21を介して入・切操作し、支点越え作用によって入・切位置を保つように構成される一方、前記後進牽制機構22は、主変速機構が後進操作されたとき、クラッチレバー20の支点越え操作を牽制するように構成されるため、後進時のクラッチ操作方式をデッドマンクラッチ方式に切換えることが可能になり、その結果、直ちに走行を停止させたい状況においては、クラッチレバー20から手を離すだけでは走行を停止させることができる。
【0019】
また、前記走行クラッチ機構15と後進牽制機構22との間には、走行クラッチ機構15のテンション調整機能を備えた連結プレート23が介設されているため、伝動ベルト18の伸び変形等に起因するテンション不良に対応できる許りでなく、適正なテンション調整によって後進牽制機構22を有効に機能させることができる。
【0020】
また、前記後進牽制機構22は、シフトアーム11の牽制凸部11bに接当してクラッチレバー20の入操作を牽制するストッパアーム18に、そのストッパ位置を調整するストッパ位置調整機能を備えるため、適正なストッパ位置調整によって後進牽制機構22を有効に機能させることができる。
【0021】
尚、本発明は、前記実施形態に限定されないことは勿論であって、例えば図13〜図18に示す第二実施形態のように、後進牽制機構50をトランスミッションケース4内に設けてもよく、この場合には、後進牽制機構50と主変速機構との連繋が容易になり、構造を簡略化することができる。以下、第二実施形態を図面に沿って詳細に説明する。但し、第一実施形態と構成が共通する部分については、第一実施形態の説明で用いた符号を図面に付し、詳細な説明は省略する。
【0022】
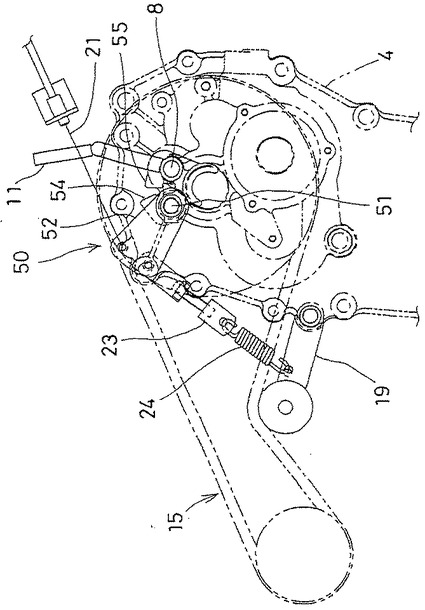
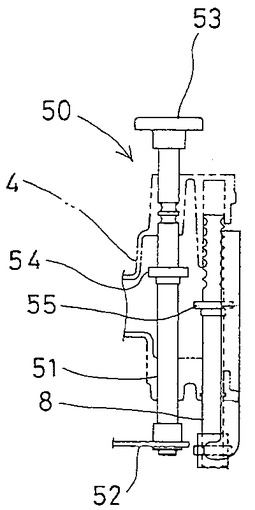
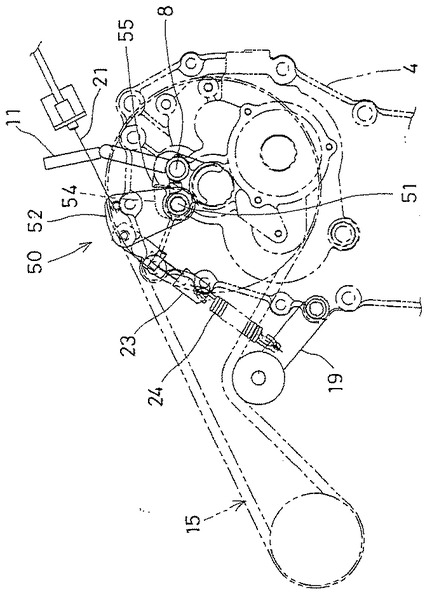
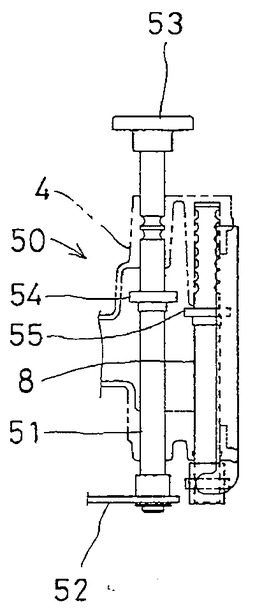
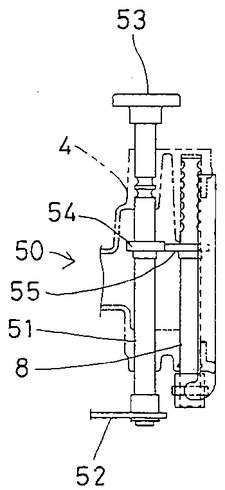
図13は、第二実施形態におけるクラッチレバー切状態を示す走行クラッチ機構および後進牽制機構の側面図、図14は、同上要部平面図である。これらの図に示すように、第二実施形態の後進牽制機構50は、トランスミッションケース4を左右に貫通するアーム支軸51と、該アーム支軸51の一端部に一体的に設けられる作動アーム52と、前記アーム支軸51の他端部に設けられる切換ハンドル53と、前記アーム支軸51の中間部に一体的に設けられるストッパアーム54と、前記主変速シフタ軸8側に一体的に設けられる牽制部材55とを備えて構成される。
【0023】
アーム支軸51は、トランスミッションケース4に左右スライド自在で、かつ、軸回り方向回動自在に支持されると共に、切換ハンドル53の操作に応じて、後進牽制無しの右側スライド位置と、後進牽制有りの左側スライド位置とに選択的に保持される。作動アーム52は、クラッチワイヤ21を介してクラッチレバー20に連結されると共に、連結プレート23およびテンションバネ24を介してテンションアーム19に連結されており、クラッチレバー20の操作に応じて回動する。ストッパアーム54は、アーム支軸51が左側スライド位置(後進牽制有り)にあり、かつ、主変速シフタ軸8が後進位置にあるときのみ、その左右位置が牽制部材55に一致するようにアーム支軸51に設けられている。
【0024】
次に、後進牽制機構50の作用を図面に沿って説明する。図15は、第二実施形態において後進牽制無しでクラッチレバーを入操作した状態を示す後進牽制機構の側面図、図16は、同上要部平面図である。これらの図に示すように、アーム支軸51を右側スライド位置(後進牽制無し)にセットした状態でクラッチレバー20を入操作すると、クラッチワイヤ21に引かれて作動アーム52、アーム支軸51およびストッパアーム54が一体的に回動する。この状態では、主変速シフタ軸8のスライド位置に拘わらず、作動アーム52の自由な回動が許容され、クラッチレバー20は、前記支点越えによって入位置に保持される。
【0025】
図17は、第二実施形態において後進牽制有りでクラッチレバーを入操作した状態を示す後進牽制機構の側面図、図18は、同上要部平面図である。これらの図に示すように、アーム支軸51を左側スライド位置(後進牽制有り)にセットした状態でクラッチレバー20を入操作すると、クラッチワイヤ21に引かれて作動アーム52、アーム支軸51およびストッパアーム54が一体的に回動する。ここで、主変速シフタ軸8が後進(R)以外の位置にある場合は、作動アーム52の自由な回動が許容され、クラッチレバー20は、前記支点越えによって入位置に保持される。一方、主変速シフタ軸8が後進位置にある場合は、主変速シフタ軸8に設けられる牽制部材55の左右位置が、ストッパアーム54の左右位置に一致する。この状態でクラッチレバー20を入操作すると、ストッパアーム54が牽制部材55に接当し、ストッパアーム54の回動が所定の位置で牽制される。これにより、クラッチレバー20は、前記支点越え位置の手前で入操作が牽制され、入位置でのレバー固定が禁止される。つまり、後進牽制機構50は、走行変速機構が後進状態のとき、クラッチレバー20の入操作における支点越えを牽制し、クラッチ操作方式をデッドマンクラッチ方式に切換えることを可能にする。
【符号の説明】
【0026】
1 歩行型耕耘機
4 トランスミッションケース
8 主変速シフタ軸
10 主変速レバー
11 シフトアーム
11b 牽制凸部
15 走行クラッチ機構
19 テンションアーム
20 クラッチレバー
21 クラッチワイヤ
22 後進牽制機構
23 連結プレート
23c 調整ボルト
25 ブラケット
26 アーム支軸
27 作動アーム
28 ストッパアーム
28c 接当凹部
29 連結ピン
50 後進牽制機構
51 アーム支軸
52 作動アーム
53 切換ハンドル
54 ストッパアーム
55 牽制部材
【技術分野】
【0001】
本発明は、歩行型耕耘機等の作業用走行車の技術分野に属するものである。
【背景技術】
【0002】
一般に、この種歩行型耕耘機等の作業用走行車は、エンジン動力を走行変速機構を介して走行部に伝動する走行動力伝動経路と、該走行動力伝動経路中に介設される走行クラッチ機構と、該走行クラッチ機構を入・切操作するクラッチレバーとを備えており、該クラッチレバーの入・切操作に基づいて機体の発進操作や走行停止操作が行われる。このような作業用走行車においては、走行時の操作性を考慮し、クラッチレバーが入位置で保持されるようになっており、例えばバネの支点越え作用を利用してクラッチレバーを入位置に保持するものがある。
【発明の概要】
【発明が解決しようとする課題】
【0003】
しかしながら上記従来の作業用走行車では、走行変速機構が後進操作されたときであっても、クラッチレバーを入操作すると、前進操作時と同様にクラッチレバーが入位置に保持されるため、直ちに走行を停止させたい状況であっても、クラッチレバーから手を離すだけでは停止せず、クラッチレバーを意識的に切操作する必要があった。
【課題を解決するための手段】
【0004】
本発明は、上記の如き実情に鑑みこれらの課題を解決することを目的として創作されたものであって、エンジン動力をトランスミッションケースに内装した走行変速機構を介して走行部に伝動する走行動力伝動経路と、該走行動力伝動経路中に介設される走行クラッチ機構と、該走行クラッチ機構を入・切操作するクラッチレバーとを備える作業用走行車であって、該作業用走行車に、前記走行変速機構が後進操作されたとき、クラッチレバーの入操作を牽制する後進牽制手段と、該後進牽制手段による牽制の有無を選択的に切換える牽制切換手段とをトランスミッションケースの近傍に設けたことを特徴とする。つまり、走行変速機構が後進操作されたとき、クラッチレバーの入操作を牽制することができるため、例えばクラッチレバーの支点越えを牽制することによって、後進時のクラッチ操作方式をデッドマンクラッチ方式に切換えることが可能になり、その結果、直ちに走行を停止させたい状況においては、クラッチレバーから手を離すだけで走行を停止させることができる。しかも、後進牽制の有無を選択的に切換えることができるため、後進しながら作業を行う場合には、クラッチレバーを入位置に保つことができる。
【図面の簡単な説明】
【0005】
【図1】歩行型耕耘機の斜視図である。
【図2】主変速レバーを示す要部側面図である。
【図3】図2のA矢視図である。
【図4】図2のB矢視図である。
【図5】主変速シフタ軸を示す平面図である。
【図6】クラッチレバー切状態を示す走行クラッチ機構および後進牽制機構の側面図である。
【図7】同上要部平面図である。
【図8】(A)は後進牽制有りの状態を示す後進牽制機構の断面図、(B)は後進牽制無しの状態を示す後進牽制機構の断面図である。
【図9】後進牽制無しでクラッチレバーを入操作した状態を示す後進牽制機構の側面図である。
【図10】同上要部平面図である。
【図11】後進牽制有りでクラッチレバーを入操作した状態を示す後進牽制機構の側面図である。
【図12】同上要部平面図である。
【図13】第二実施形態におけるクラッチレバー切状態を示す走行クラッチ機構および後進牽制機構の側面図である。
【図14】同上要部平面図である。
【図15】第二実施形態において後進牽制無しでクラッチレバーを入操作した状態を示す後進牽制機構の側面図である。
【図16】同上要部平面図である。
【図17】第二実施形態において後進牽制有りでクラッチレバーを入操作した状態を示す後進牽制機構の側面図である。
【図18】同上要部平面図である。
【発明を実施するための形態】
【0006】
次に、本発明の一実施形態を図面に基づいて説明する。図面において、1は歩行型耕耘機であって、該歩行型耕耘機1は、前後方向を向く機体フレーム2と、該機体フレーム2に搭載されるエンジン3と、該エンジン3の動力を変速するトランスミッションケース4と、該トランスミッションケース4の下端部に車軸(図示せず)を介して取付けられる左右一対の車輪5と、機体フレーム2の後部に装着されるロータリ耕耘装置6と、機体フレーム2の後部から延出するハンドルフレーム7とを備えて構成される。
【0007】
トランスミッションケース4には、走行動力を変速する主変速機構(図示せず)が内装される。主変速機構は、トランスミッションケース4に左右方向スライド自在に組み込まれる主変速シフタ軸8のスライド操作に応じて変速作動するように構成されており、該主変速シフタ軸8は、その外周部に複数形成される位置決め溝8aと、バネ9aで付勢された位置決めボール9との係合によって各変速位置に保持される。
【0008】
トランスミッションケース4の上方には、主変速機構を変速操作するための主変速レバー10が設けられる。主変速レバー10は、レバー軸10aを支点として左右回動自在に支持されており、その基端部はシフトアーム11に連繋される。シフトアーム11は、基端部に連結ボス11aを備えるL字状のアーム部材であり、トランスミッションケース4の一側部から突出した前記主変速シフタ軸8の一端部に一体的に連結される。これにより、主変速レバー10の左右操作に応じて主変速シフタ軸8が左右にスライドし、主変速機構が変速作動される。因みに、本実施形態の主変速レバー10は、さらに前後操作自在に支持されると共に、スライドプレート12および連結ロッド13を介してロータリ正逆転切換機構(図示せず)の切換アーム14に連繋されており、主変速レバー10の前後操作に応じた切換アーム14の前後回動により、ロータリ正逆転切換機構が切換作動される。
【0009】
エンジン3とトランスミッションケース4との間には、走行クラッチ機構15が介設される。走行クラッチ機構15は、エンジン3の出力軸3aに設けられる出力プーリ16と、トランスミッションケース4の入力軸4aに設けられる入力プーリ17と、両プーリ16、17間に懸回される伝動ベルト18と、該伝動ベルト18を緊張・弛緩させるテンションアーム19とを備えており、該テンションアーム19の操作に応じて両プーリ16、17間の動力伝動を入・切するベルトテンションクラッチ機構を構成する。
【0010】
ハンドルフレーム7には、前後操作自在なクラッチレバー20が設けられている。クラッチレバー20は、クラッチワイヤ21等を介してテンションアーム19に連結されており、クラッチレバー20が後方位置にあるときは、クラッチワイヤ21が緩み、走行クラッチ機構15が切状態に保たれる。一方、クラッチレバー20を前側に倒し操作すると、クラッチワイヤ21が引かれ、走行クラッチ機構15が入状態に切り換えられる。このとき、クラッチワイヤ21を介してクラッチレバー20に作用する引張荷重は、クラッチレバー20の支軸20aを支点越えし、クラッチレバー20を入位置に保持する。
【0011】
クラッチワイヤ21は、後進牽制機構22、連結プレート23およびテンションバネ24を介してテンションアーム19に連結される。後進牽制機構22は、トランスミッションケース4の側面部に設けられるブラケット25と、該ブラケット25から外側方に突出するアーム支軸26と、該アーム支軸26に前後回動自在に設けられる作動アーム27と、前記アーム支軸26に前後回動自在に設けられ、作動アーム27とブラケット25との間に介在するストッパアーム28と、該ストッパアーム28に左右スライド自在に設けられる連結ピン29とを備えて構成される。
【0012】
作動アーム27は、クラッチワイヤ21を介してクラッチレバー20に連結されると共に、連結プレート23およびテンションバネ24を介してテンションアーム19に連結されており、クラッチレバー20の操作に応じて回動する。ストッパアーム28は、その先端部に設けられるボス28aで連結ピン29を左右スライド自在に支持する。ボス28aには、平面視凵字状のガイド孔28bが形成されており、連結ピン29に一体的に設けられる切換レバー29aがガイド孔28bを介して上方に突出する。連結ピン29は、切換レバー29aのガイド孔28bに沿った左右操作に応じてスライドし、右側スライド位置(後進牽制無し)では、ブラケット25に形成される係合孔25aに係合する一方、左側スライド位置(後進牽制有り)では、作動アーム27に形成される係合孔27aに係合する。これにより、ストッパアーム28を作動アーム27に選択的に連結することが可能になる。また、ガイド孔28bは、左右両端部に係止溝(図示せず)を有し、該係止溝に切換レバー29aを弾圧状に係合させることにより、連結ピン29が各スライド位置に保持される。
【0013】
次に、後進牽制機構22の作用を図面に沿って説明する。図9は、後進牽制無しでクラッチレバーを入操作した状態を示す後進牽制機構の側面図、図10は、同上要部平面図である。これらの図に示すように、連結ピン29をブラケット25側に係合させた状態でクラッチレバー20を入操作すると、クラッチワイヤ21に引かれて作動アーム27が単独で回動する。この状態では、主変速シフタ軸8のスライド位置に拘わらず、作動アーム27の自由な回動が許容され、クラッチレバー20は、前記支点越えによって入位置に保持される。
【0014】
図11は、後進牽制有りでクラッチレバーを入操作した状態を示す後進牽制機構の側面図、図12は、同上要部平面図である。これらの図に示すように、連結ピン29を作動アーム27側に係合させた状態でクラッチレバー20を入操作すると、クラッチワイヤ21に引かれて作動アーム27およびストッパアーム28が一体的に回動する。ここで、主変速シフタ軸8が後進(R)以外の位置にある場合は、作動アーム27の自由な回動が許容され、クラッチレバー20は、前記支点越えによって入位置に保持される。一方、主変速シフタ軸8が後進位置にある場合は、シフトアーム11の連結ボス11aに形成される牽制凸部11bの左右位置が、ストッパアーム28の左右位置に一致する。この状態でクラッチレバー20を入操作すると、ストッパアーム28の後端部に形成される接当凹部28cが牽制凸部11bに接当し、ストッパアーム28の回動が所定の位置で牽制される。これにより、クラッチレバー20は、前記支点越え位置の手前で入操作が牽制され、入位置でのレバー固定が禁止される。つまり、後進牽制機構22は、走行変速機構が後進状態のとき、クラッチレバー20の入操作における支点越えを牽制し、クラッチ操作方式をデッドマンクラッチ方式に切換えることを可能にする。
【0015】
ところで、本実施形態のストッパアーム28は、連結ピン29を支持する第1ストッパアーム28dと、接当凹部28cが形成される第2ストッパアーム28eとに分割されており、それぞれがアーム支軸26に回動自在に支持されている。両ストッパアーム28d、28eは、ボルト30によって一体的に連結されるが、第2ストッパアーム28eのボルト挿通孔(図示せず)は、アーム支軸26を中心とする円弧状の長孔であり、第1ストッパアーム28dに対する第2ストッパアーム28eの位置調整が許容される。これにより、組立誤差、加工誤差、ワイヤ変形等に拘わらず、クラッチレバー20の牽制位置を適正に保ち、後進牽制機構22を有効に機能させることが可能になる。
【0016】
また、本実施形態の連結プレート23は、第1連結プレート23aと第2連結プレート23bとに分割され、長さ調整ボルト23cを介して連結されている。長さ調整ボルト23cは、第2連結プレート23bに螺入し、その回し操作に応じて第2連結プレート23bを進退移動させることにより、連結プレート23の長さを調整する。これにより、走行クラッチ機構15のテンション調整が可能になり、伝動ベルト18の伸び変形等に起因するテンション不良に対応できる許りでなく、適正なテンション調整によって後進牽制機構22を有効に機能させることが可能になる。
【0017】
叙述の如く構成されたものにおいて、エンジン3の動力を主変速機構(走行変速機構)を介して車輪5(走行部)に伝動する走行動力伝動経路と、該走行動力伝動経路中に介設される走行クラッチ機構15と、該走行クラッチ機構15を入・切操作するクラッチレバー20とを備える歩行型耕耘機1であって、該歩行型耕耘機に、前記主変速機構が後進操作されたとき、クラッチレバー20の入操作を牽制する後進牽制機構22と、該後進牽制機構22による牽制の有無を選択的に切換える連結ピン29とを設けたため、主変速機構が後進操作されたとき、クラッチレバー20の入操作を牽制できる。連結ピン29の操作で後進牽制の有無を選択的に切換えることができるため、後進しながら作業を行う場合には、クラッチレバー20を入位置に保つことができる。
【0018】
また、前記クラッチレバー20は、ベルトテンション方式の走行クラッチ機構15をクラッチワイヤ21を介して入・切操作し、支点越え作用によって入・切位置を保つように構成される一方、前記後進牽制機構22は、主変速機構が後進操作されたとき、クラッチレバー20の支点越え操作を牽制するように構成されるため、後進時のクラッチ操作方式をデッドマンクラッチ方式に切換えることが可能になり、その結果、直ちに走行を停止させたい状況においては、クラッチレバー20から手を離すだけでは走行を停止させることができる。
【0019】
また、前記走行クラッチ機構15と後進牽制機構22との間には、走行クラッチ機構15のテンション調整機能を備えた連結プレート23が介設されているため、伝動ベルト18の伸び変形等に起因するテンション不良に対応できる許りでなく、適正なテンション調整によって後進牽制機構22を有効に機能させることができる。
【0020】
また、前記後進牽制機構22は、シフトアーム11の牽制凸部11bに接当してクラッチレバー20の入操作を牽制するストッパアーム18に、そのストッパ位置を調整するストッパ位置調整機能を備えるため、適正なストッパ位置調整によって後進牽制機構22を有効に機能させることができる。
【0021】
尚、本発明は、前記実施形態に限定されないことは勿論であって、例えば図13〜図18に示す第二実施形態のように、後進牽制機構50をトランスミッションケース4内に設けてもよく、この場合には、後進牽制機構50と主変速機構との連繋が容易になり、構造を簡略化することができる。以下、第二実施形態を図面に沿って詳細に説明する。但し、第一実施形態と構成が共通する部分については、第一実施形態の説明で用いた符号を図面に付し、詳細な説明は省略する。
【0022】
図13は、第二実施形態におけるクラッチレバー切状態を示す走行クラッチ機構および後進牽制機構の側面図、図14は、同上要部平面図である。これらの図に示すように、第二実施形態の後進牽制機構50は、トランスミッションケース4を左右に貫通するアーム支軸51と、該アーム支軸51の一端部に一体的に設けられる作動アーム52と、前記アーム支軸51の他端部に設けられる切換ハンドル53と、前記アーム支軸51の中間部に一体的に設けられるストッパアーム54と、前記主変速シフタ軸8側に一体的に設けられる牽制部材55とを備えて構成される。
【0023】
アーム支軸51は、トランスミッションケース4に左右スライド自在で、かつ、軸回り方向回動自在に支持されると共に、切換ハンドル53の操作に応じて、後進牽制無しの右側スライド位置と、後進牽制有りの左側スライド位置とに選択的に保持される。作動アーム52は、クラッチワイヤ21を介してクラッチレバー20に連結されると共に、連結プレート23およびテンションバネ24を介してテンションアーム19に連結されており、クラッチレバー20の操作に応じて回動する。ストッパアーム54は、アーム支軸51が左側スライド位置(後進牽制有り)にあり、かつ、主変速シフタ軸8が後進位置にあるときのみ、その左右位置が牽制部材55に一致するようにアーム支軸51に設けられている。
【0024】
次に、後進牽制機構50の作用を図面に沿って説明する。図15は、第二実施形態において後進牽制無しでクラッチレバーを入操作した状態を示す後進牽制機構の側面図、図16は、同上要部平面図である。これらの図に示すように、アーム支軸51を右側スライド位置(後進牽制無し)にセットした状態でクラッチレバー20を入操作すると、クラッチワイヤ21に引かれて作動アーム52、アーム支軸51およびストッパアーム54が一体的に回動する。この状態では、主変速シフタ軸8のスライド位置に拘わらず、作動アーム52の自由な回動が許容され、クラッチレバー20は、前記支点越えによって入位置に保持される。
【0025】
図17は、第二実施形態において後進牽制有りでクラッチレバーを入操作した状態を示す後進牽制機構の側面図、図18は、同上要部平面図である。これらの図に示すように、アーム支軸51を左側スライド位置(後進牽制有り)にセットした状態でクラッチレバー20を入操作すると、クラッチワイヤ21に引かれて作動アーム52、アーム支軸51およびストッパアーム54が一体的に回動する。ここで、主変速シフタ軸8が後進(R)以外の位置にある場合は、作動アーム52の自由な回動が許容され、クラッチレバー20は、前記支点越えによって入位置に保持される。一方、主変速シフタ軸8が後進位置にある場合は、主変速シフタ軸8に設けられる牽制部材55の左右位置が、ストッパアーム54の左右位置に一致する。この状態でクラッチレバー20を入操作すると、ストッパアーム54が牽制部材55に接当し、ストッパアーム54の回動が所定の位置で牽制される。これにより、クラッチレバー20は、前記支点越え位置の手前で入操作が牽制され、入位置でのレバー固定が禁止される。つまり、後進牽制機構50は、走行変速機構が後進状態のとき、クラッチレバー20の入操作における支点越えを牽制し、クラッチ操作方式をデッドマンクラッチ方式に切換えることを可能にする。
【符号の説明】
【0026】
1 歩行型耕耘機
4 トランスミッションケース
8 主変速シフタ軸
10 主変速レバー
11 シフトアーム
11b 牽制凸部
15 走行クラッチ機構
19 テンションアーム
20 クラッチレバー
21 クラッチワイヤ
22 後進牽制機構
23 連結プレート
23c 調整ボルト
25 ブラケット
26 アーム支軸
27 作動アーム
28 ストッパアーム
28c 接当凹部
29 連結ピン
50 後進牽制機構
51 アーム支軸
52 作動アーム
53 切換ハンドル
54 ストッパアーム
55 牽制部材
【特許請求の範囲】
【請求項1】
エンジン動力をトランスミッションケースに内装した走行変速機構を介して走行部に伝動する走行動力伝動経路と、該走行動力伝動経路中に介設される走行クラッチ機構と、該走行クラッチ機構を入・切操作するクラッチレバーとを備える作業用走行車であって、該作業用走行車に、前記走行変速機構が後進操作されたとき、クラッチレバーの入操作を牽制する後進牽制手段と、該後進牽制手段による牽制の有無を選択的に切換える牽制切換手段とをトランスミッションケースの近傍に設けたことを特徴とする作業用走行車。
【請求項1】
エンジン動力をトランスミッションケースに内装した走行変速機構を介して走行部に伝動する走行動力伝動経路と、該走行動力伝動経路中に介設される走行クラッチ機構と、該走行クラッチ機構を入・切操作するクラッチレバーとを備える作業用走行車であって、該作業用走行車に、前記走行変速機構が後進操作されたとき、クラッチレバーの入操作を牽制する後進牽制手段と、該後進牽制手段による牽制の有無を選択的に切換える牽制切換手段とをトランスミッションケースの近傍に設けたことを特徴とする作業用走行車。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】

【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2010−149851(P2010−149851A)
【公開日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願番号】特願2010−16348(P2010−16348)
【出願日】平成22年1月28日(2010.1.28)
【分割の表示】特願2001−261621(P2001−261621)の分割
【原出願日】平成13年8月30日(2001.8.30)
【出願人】(000001878)三菱農機株式会社 (1,502)
【Fターム(参考)】
【公開日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願日】平成22年1月28日(2010.1.28)
【分割の表示】特願2001−261621(P2001−261621)の分割
【原出願日】平成13年8月30日(2001.8.30)
【出願人】(000001878)三菱農機株式会社 (1,502)
【Fターム(参考)】
[ Back to top ]