
作業管理システム及び作業管理方法
【課題】本発明は作業者の作業動作を検出した信号に基づいて作業者の動作を精度良く判定することを課題とする。
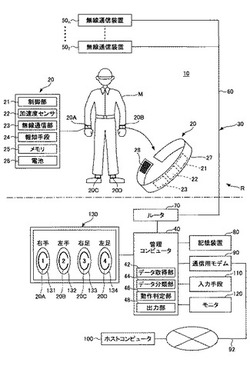
【解決手段】作業管理システム10は、センサユニット20(20A〜20D)と、無線通信システム30と、管理コンピュータ40とを有する。センサユニット20(20A〜20D)の制御部21は、加速度センサ22から得られた加速度のセンサ信号をメモリ25に記憶させ、管理コンピュータ40からのデータ要求に応じてメモリ25に記憶させたセンサ信号のデータを無線通信部23から無線信号として送信させる。管理コンピュータ40は、データ取得部42と、データ分類部44と、動作判定部46と、出力部48とを有する。また、管理コンピュータ40は、無線通信装置501〜50nから送信された各センサユニット20のセンサ信号を検出波形パターンとして記憶装置80に記憶させ、作業者の動作が適正か否かを判定する。
【解決手段】作業管理システム10は、センサユニット20(20A〜20D)と、無線通信システム30と、管理コンピュータ40とを有する。センサユニット20(20A〜20D)の制御部21は、加速度センサ22から得られた加速度のセンサ信号をメモリ25に記憶させ、管理コンピュータ40からのデータ要求に応じてメモリ25に記憶させたセンサ信号のデータを無線通信部23から無線信号として送信させる。管理コンピュータ40は、データ取得部42と、データ分類部44と、動作判定部46と、出力部48とを有する。また、管理コンピュータ40は、無線通信装置501〜50nから送信された各センサユニット20のセンサ信号を検出波形パターンとして記憶装置80に記憶させ、作業者の動作が適正か否かを判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は作業管理システム及び作業管理方法に係り、特に作業者(管理対象者)の作業内容及び作業手順に関する情報をデータベースに格納して作業者の行動を検証するように構成された作業管理システム及び作業管理方法に関する。
【背景技術】
【0002】
例えば、工業製品を組立てる工場や多品種の製品を管理する倉庫、あるいは病院や介護施設などでは、大勢の人が夫々決められた作業マニュアルに沿ってその日に予定された作業を順々に行なっている。このような多数の人が個別の作業を行なう場合、各人が最も効率の良い作業内容及び作業手順で作業を行なうように予め指導されている。
【0003】
このような作業環境においては、作業者が増えると、各作業班の管理者またはチームリーダは、各作業者の細かい作業までみることが難しくなり、不良品の発生や不注意による作業ミスがあった場合に原因究明のための検証に時間がかかっていた。
【0004】
また、作業者の動作結果を解析する作業管理システムとしては、作業者の動作情報を得るための第1センサと、物品の状態を検出する第2センサとから得られた情報を突き合わせることで動作結果を解析する作業管理システムの開発が進められている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−201569号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に記載されたシステムでは、各作業者の動作や作業手順を作業情報として検出しておらず、例えば、作業者が間違った作業を行なって不良品が発生した場合でもその原因を検証することができず、作業者自身が作業内容、または作業手順を間違えたことに気付かない場合には、不良品の発生原因が分からないままとなる。
【0007】
また、病院や介護施設などで働く介護士の場合、各人が介護の内容や手順を間違いなく行なっているのかを管理することが難しく、且つ事故が起こらないように注意しながら、効率良く作業する必要があるので、介護の内容を正確に検証できることが要望されている。
【0008】
そこで、本発明は上記事情に鑑み、上記課題を解決した作業管理システム及び作業管理方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するため、本発明は以下のような手段を有する。
(1)本発明は、管理対象者の動作を検出するセンサユニットと、
前記センサユニットにより検出された当該管理対象者のセンサ信号を取得するデータ取得手段と、
前記データ取得手段により取得されたセンサ信号を各動作毎に分類するデータ分類手段と、
前記データ分類手段により分類されたセンサ信号に基づいて動作を判定する動作判定手段と、
前記動作判定手段の判定結果を出力する出力手段と、
を備えたことを特徴とする。
(2)本発明は、管理対象者の動作を検出するセンサユニットと、
前記センサユニットにより検出された当該管理対象者の動作データを取得するデータ取得手段と、
前記データ取得手段により取得された動作データを各動作毎の波形パターンに分類するデータ分類手段と、
前記データ分類手段により分類された波形パターンに基づいて動作を判定する動作判定手段と、
前記動作判定手段の判定結果を出力する出力手段と、
を備えたことを特徴とする。
(3)本発明の前記センサユニットは、
前記管理対象者の動きに応じた加速度を検出する加速度センサと、
前記加速度センサにより検出された動作データを記憶する記憶手段と、
前記記憶手段に記憶された動作データを送信する送信手段と、
を有することを特徴とする。
(4)本発明の前記記憶手段は、前記加速度センサにより検出された加速度の信号波形を記憶することを特徴とする。
(5)本発明の前記データ取得手段は、前記センサユニットにより検出されたセンサ信号を無線信号として取得することを特徴とする。
(6)本発明の前記データ分類手段は、前記センサユニットにより検出されたセンサ信号の波形を各動作に応じたタスク毎のパターンに分類することを特徴とする。
(7)本発明の前記動作判定手段は、
予め設定された各動作に応じたタスク毎の基本波形パターンと前記データ分類手段により分類された前記信号波形の検出波形パターンとを比較する第1の比較手段と、
前記第1の比較手段により両波形パターンが一致した場合に当該検出波形パターンが正規の動作であると判定し、前記両波形パターンが一致しない場合には当該検出波形パターンが正規の動作ではないと判定する第1の判定手段と、
を有することを特徴とする。
(8)本発明の前記第1の比較手段は、前記基本波形パターンと前記検出波形パターンとの差分を求め、当該差分が所定範囲内である場合に両波形パターンが一致しているとし、当該差分が所定範囲外である場合に両波形パターンが不一致とすることを特徴とする。
(9)本発明の前記動作判定手段は、
前記データ分類手段により分類された前記信号波形の出力レベルと予め設定された閾値とを比較する第2の比較手段と、
前記第2の比較手段により前記信号波形の出力レベルが閾値を越える場合に所定時間間隔毎の矩形波を生成する矩形波生成手段と、
前記矩形波生成手段により生成された矩形波をカウントするカウント手段と、
前記カウント手段によりカウントされたカウント値と予め設定された各動作に応じたタスク毎のカウント値とを比較する第3の比較手段と、
前記第3の比較手段により両カウント値が一致した場合に当該検出波形パターンが正規の動作であると判定し、前記両カウント値が一致しない場合には当該検出波形パターンが正規の動作ではないと判定する第2の判定手段と、
を有することを特徴とする。
(10)本発明の前記動作判定手段は、
各作業の基本動作を前記加速度センサにより検出し、前記加速度センサからのセンサ信号を高速フーリエ変換する変換手段と、
前記変換手段による変換結果を記憶する記憶手段と、
前記変換手段により変換された波形の周波数特性と前記記憶手段に記憶された波形の周波数特性とを比較する第4の比較手段と、
前記第4の比較手段により両周波数特性が一致した場合に前記加速度センサからのセンサ信号が正規の動作であると判定し、前記両周波数特性が一致しない場合には当該検出波形パターンが正規の動作ではないと判定する第3の判定手段と、
を有することを特徴とする。
(11)本発明の前記動作判定手段は、
各作業の基本動作を前記加速度センサにより検出し、前記加速度センサからのセンサ信号を高速フーリエ変換する変換手段と、
前記変換手段による変換結果を記憶する記憶手段と、
前記変換手段により変換された波形から基本動作以外の波形を除去するフィルタ手段と、
前記フィルタ手段により除去された波形を除くセンサ信号の周波数特性と前記記憶手段に記憶された波形の周波数特性とを比較する第5の比較手段と、
前記第5の比較手段により両周波数特性が一致した場合に前記加速度センサからのセンサ信号が正規の動作であると判定し、前記両周波数特性が一致しない場合には当該検出波形パターンが正規の動作ではないと判定する第4の判定手段と、
を有することを特徴とする。
(12)本発明の前記出力手段は、前記動作判定手段の判定結果を前記記憶手段に記憶させると共に、モニタに表示させることを特徴とする。
(13)本発明の前記出力手段は、前記動作判定手段の判定結果を通信回線を介して上位コンピュータに送信することを特徴とする。
(14)本発明は、管理対象者の動作をセンサユニットにより検出する過程と、
前記センサユニットにより検出されたセンサ信号を取得する過程と、
前記取得されたセンサ信号を各動作毎の波形パターンに分類する過程と、
前記分類されたセンサ信号に基づいて動作を判定する過程と、
前記動作判定の判定結果を出力する過程と、
を含むことを特徴とする作業管理方法である。
(15)本発明は、管理対象者の動作をセンサユニットにより検出する過程と、
前記センサユニットにより検出された動作データを取得する過程と、
前記取得された動作データを各動作毎の波形パターンに分類する過程と、
前記分類された波形パターンに基づいて動作を判定する過程と、
前記動作判定の判定結果を出力する過程と、
を含むことを特徴とする作業管理方法である。
【発明の効果】
【0010】
本発明によれば、センサユニットにより検出された管理対象者のセンサ信号または動作データを取得し、取得されたセンサ信号または動作データを各動作毎のパターンに分類して各動作毎の波形に基づいて動作を判定するため、各センサユニットによる検出結果のデータ処理量を簡素化して動作判定時間を短縮できると共に、各管理対象者の動作の判定効率を高めて作業管理の精度を向上させることができる。
【0011】
また、本発明によれば、センサユニットにより検出された信号波形を各動作に応じたタスク毎のパターンに分類することにより、各タスク毎の検出波形パターンと基本波形パターンとを比較しやすくなり、比較結果に基づいて作業の適正を判断することが可能になる。
【0012】
また、本発明によれば、信号波形の出力レベルが閾値を越える場合に所定時間間隔毎の矩形波を生成し、生成された矩形波のカウント値と予め設定された各動作に応じたタスク毎のカウント値とを比較することで、管理対象者の動作の判定効率をより一層高めることが可能になる。
【0013】
また、本発明によれば、管理対象者の動作の判定結果を記憶させてあるので、判定結果を検証することが可能になり、予期せぬ事故が発生した場合にも原因の究明を速やかに行なうことができる。
【図面の簡単な説明】
【0014】
【図1】本発明による作業管理システムの一実施例を概念的に示すシステム構成図である。
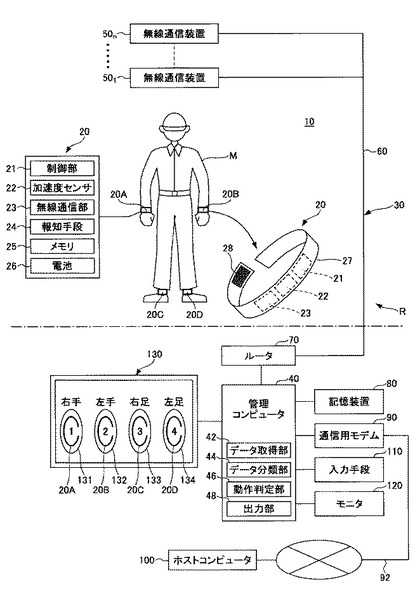
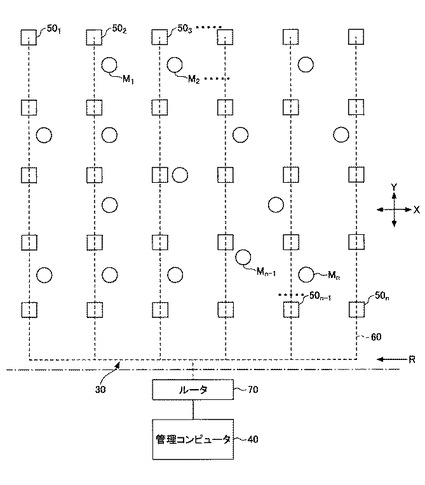
【図2】複数の作業者が配置された場合のセンサ信号の送受信を行なう通信システムを概念的に示す平面図である。
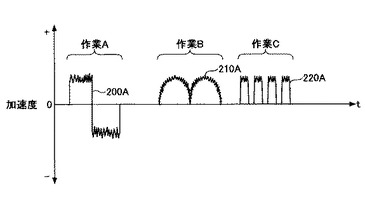
【図3A】各作業毎の動作データの基本波形パターンを模式的に示す図である。
【図3B】各作業毎に検出された動作データの検出波形パターンを模式的に示す図である。
【図3C】動作データからノイズ成分を除去した検出波形パターンを模式的に示す図である。
【図3D】検出波形パターンに類似する基本波形パターンを重ねわせた比較処理を模式的に示す図である。
【図4A】管理コンピュータに入力された各作業者のタスクデータの表示例を模式的に示す図である。
【図4B】管理コンピュータに入力操作される各タスク作業設定画面の表示例を模式的に示す図である。
【図5】管理コンピュータの記憶装置に格納されたタスクデータベースを模式的に示す図である。
【図6】センサユニットの制御部が実行する制御処理を説明するためのフローチャートである。
【図7】管理コンピュータが実行する制御処理を説明するためのフローチャートである。
【図8】管理コンピュータが実行する変形例1の制御処理を説明するためのフローチャートである。
【図9A】センサ信号の波形に対する閾値を設定した場合を模式的に示す図である。
【図9B】センサ信号の波形が閾値以上である場合に微小単位時間当たりの矩形波を生成する過程を説明するための図である。
【図10】管理コンピュータが実行する変形例2の制御処理を説明するためのフローチャートである。
【図11】変形例3の制御系を示すブロック図である。
【図12A】FFT変換前の基本波形パターンを示す波形図である。
【図12B】FFT変換後の基本波形パターンの周波数特性を示す波形図である。
【図13A】FFT変換前の検出波形パターンを示す波形図である。
【図13B】FFT変換後の検出波形パターンの周波数特性を示す波形図である。
【図14A】FFT変換前の別の基本波形パターンを示す波形図である。
【図14B】FFT変換後の別の基本波形パターンの周波数特性を示す波形図である。
【図15A】FFT変換前の別の検出波形パターンを示す波形図である。
【図15B】FFT変換後の別の検出波形パターンの周波数特性を示す波形図である。
【図16】管理コンピュータが実行する変形例3の制御処理を説明するためのフローチャートである。
【図17】変形例4の制御系を示すブロック図である。
【図18A】FFT変換前の検出波形パターンを示す波形図である。
【図18B】FFT変換後のノイズ成分の周波数特性を示す波形図である。
【図18C】FFT変換後の別のノイズ成分の周波数特性を示す波形図である。
【図19】ノイズ成分を除去された検出波形パターンを示す波形図である。
【発明を実施するための形態】
【0015】
以下、図面を参照して本発明を実施するための形態について説明する。
【実施例1】
【0016】
図1は本発明による作業管理システムの一実施例を概念的に示すシステム構成図である。図2は複数の作業者が配置された場合のセンサ信号の送受信を行なう通信システムを概念的に示す平面図である。
【0017】
図1及び図2に示されるように、作業管理システム10は、管理対象者である各作業者M(M1〜Mn)の手首、足首の装着された複数のセンサユニット20(20A〜20D)から得られた動作データに基づいて各作業者M(M1〜Mn)が所定の作業を行なっていることを管理するシステムである。
【0018】
尚、本実施例において、各作業者M(M1〜Mn)の作業としては、例えば、製品の組立て作業、組立て完了した製品の機能を検査する検査作業、あるいは倉庫などでの製品別の搬送作業、あるいは病院や介護施設での介護作業やリハビリテーション作業などがある。また、センサユニット20は、作業内容に応じて適宜装着位置を変更しても良い。例えば、手の動きを重点的に検出する場合には、足首を無くして左右の手首、肘の夫々にセンサユニット20を配しても良い。
【0019】
作業管理システム10は、センサユニット20(20A〜20D)と、無線通信システム30と、管理コンピュータ40とを有する。センサユニット20(20A〜20D)は、制御部21と、加速度センサ22と、無線通信部23と、報知手段24と、メモリ25と、電池26とがリストバンド27に設けられている。リストバンド27は、各作業者M1〜Mnの手首、足首などの動作する部分に装着しやすいように、軽量且つ柔軟性を有する材質(例えば、防水加工された布)によって形成されている。また、リストバンド27は、装着操作及び分離操作が容易に行えるように例えば、マジックテープ(登録商標)などからなる締結部28が形成されており、各作業者M1〜Mnが作業するときに装着され、作業終了後、あるいは休憩のときは作業者Mから分離される。
【0020】
制御部21、加速度センサ22、無線通信部23、報知手段24、メモリ25は、何れも微小なチップからなり、各作業者M1〜Mnが作業する際の負担にならないように形成されている。加速度センサ22としては、例えば、3軸の加速度を検出可能なセンサチップからなり、各作業者M1〜Mnの手足の動きに応じた加速度を検出し、加速度に応じたセンサ信号を出力する。
【0021】
制御部21は、加速度センサ22から得られた加速度のセンサ信号をメモリ25に記憶させ、管理コンピュータ40からのデータ要求に応じてメモリ25に記憶させたセンサ信号のデータを無線通信部23から無線信号として送信させる。
【0022】
報知手段24は、例えば、小型スピーカ、あるいは発光ダイオードからなり、管理コンピュータ40において、警告信号が出力されると、小型スピーカから警告音を発したり、あるいは発光ダイオードの点灯または点滅による警告を行なう。
【0023】
また、電池26は、板状に形成された充電式バッテリであり、例えば、作業者Mが作業終了、あるいは休憩のため作業室を出たときに、作業室の出入り口付近に設置された充電装置によって充電される。
【0024】
無線通信システム30は、無線LANシステムからなり、各センサユニット20と無線信号によるデータ通信を行なうものであり、複数の無線通信装置501〜50nと、通信回線60と、ルータ70とを有する。複数の無線通信装置501〜50nは、図2中正方形状のシンボルマークで示すように、作業室Rの床面あるいは天井にX、Y方向に所定間隔おきにマトリックス状に設置されており、通信回線60を介して管理コンピュータ40のルータ70に接続されている。各無線通信装置501〜50nは、夫々電波の送受信可能範囲が決められており、各無線通信装置501〜50nの中間位置が境界となるように離間距離(間隔)が設定されている。
【0025】
また、各作業者M1〜Mnは、図2中丸印のシンボルマークで示すように、複数の無線通信装置501〜50nの間に点在するように配置されている。各作業者M1〜Mnは、作業内容(タスク)に応じて適宜作業位置を変更するため、その日の作業スケジュールに応じて各作業位置に移動する。
【0026】
各センサユニット20の無線通信部23は、近接距離無線方式(例えば、ブルートゥース:Bluetoothなど)により複数の無線通信装置501〜50nのうち最も近い位置にある無線通信装置50とデータの送受信を行なう。また、管理コンピュータ40では、センサユニット20から送信された動作データを受信して各作業者M1〜Mnの作業が適正に行なわれているかを判定すると共に、センサ信号を受信した無線通信装置50のアドレスにより動作データを送信したセンサユニット20(または作業者)の位置を確認することができる。
【0027】
管理コンピュータ40は、作業室Rとは別の室に設置されており、作業室Rで作業を行なう複数の作業者Aに装着された各センサユニット20から送信される動作データ(加速度センサ22から出力されたセンサ信号)を記憶装置80に格納する。また、管理コンピュータ40は、記憶装置80に格納された各制御プログラムを読み込んで各種制御処理を実行する。
【0028】
また、管理コンピュータ40は、データ取得部42と、データ分類部44と、動作判定部46と、出力部48とを有する。また、管理コンピュータ40は、無線通信装置501〜50nから送信された各センサユニット20のセンサ信号を検出波形パターンとして記憶装置80に記憶させる。また、記憶装置80には、後述するようにデータベースの他に、各制御プログラムが格納されている。
【0029】
データ取得部42は、無線通信システム30を介して各センサユニット20により検出された作業者(管理対象者)の動作データを取得して記憶装置80に格納する制御手段である。データ分類手段44は、取得された動作データを各タスクの作業毎の波形パターンに分類する制御手段である。
【0030】
動作判定手段46は、分類された作業毎の検出波形パターンと基本波形パターンとを比較して各作業の動作を判定する制御手段である。出力部48は、判定結果をモニタ120や通信モデム90及び通信回線92を介して外部に設置された上位のホストコンピュータ100に出力する制御手段である。
【0031】
また、管理コンピュータ40は、通信用モデム90に接続された通信回線92を介して外部に設置された上位のホストコンピュータ100と通信可能に接続されており、複数のセンサユニット20から取得した各作業者Mの動作データ(センサ信号)を定期的にホストコンピュータ100に転送する。そのため、ホストコンピュータ100が設置されたセンタにおいても、管理コンピュータ20と同様に、各作業者の作業内容や作業手順が適正に行なわれているか否かを検出することができる。
【0032】
さらに、管理コンピュータ40には、入力手段(キーボードやマウス、タッチパネル等)110からの入力信号に応じて各タスクの作業手順を設定すると共に、入力された作業内容をモニタ120に表示する。
【0033】
また、管理コンピュータ40には、センサユニット読み取り装置130が接続されている。センサユニット読み取り装置130は、1人分のセンサユニット20A〜20Dが載置されるデータ読み取り部131〜134を有しており、無線通信装置501〜50nが使用できないとき、あるいはセンサユニット20A〜20Dのメモリ25に格納されたその日のデータを一括して保存する場合に使用される。データ読み取り部131〜134は、夫々楕円形状の凹部に形成されており、載置されたセンサユニット20A〜20Dの無線通信部23を介してメモリ25に格納されたその日の動作データを読み取って記憶装置80に記憶させる。尚、記憶装置80には、後述する図3Cに示すようなフィルタリング後のノイズ除去された検出波形パターン200C、210C、220C・・・の波形が基本波形パターンとして格納される。そして、フィルタリング後の検出波形パターン200C、210C、220C・・・による基本波形パターンと実際に動作したときのフィルタリング後の検出波形とを比較することで所定の作業動作と異なる動作しているものと判定することが可能になる。
【0034】
ここで、加速度センサ22により検出されるセンサ信号のパターンについて説明する。
【0035】
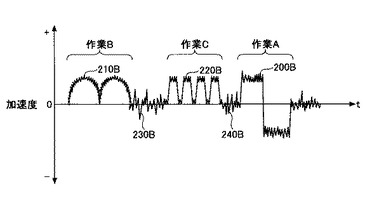
図3Aは各作業毎の動作データの基本波形パターンを模式的に示す図である。図3Aに示されるように、センサユニット20の加速度センサ22は、例えば、各作業A、B、C・・・に応じた動作に応じて検出波形パターン200A、210A、220A・・・のような異なるパターンのセンサ信号を出力する。検出波形パターン200A、210A、220A・・・は、予め作業前に計測した動作データであって、記憶装置80のデータベースに登録されている。尚、ここでは、説明の便宜上、各作業A、B、Cの波形パターンについて説明するが、実際には設定された作業数に応じた数の波形パターンが多数存在する。また、各検出波形パターン200A、210A、220A・・・は、高周波帯域の信号(ノイズ)が重畳されているため、各波形の形状が不鮮明になっている。
【0036】
図3Bは各作業毎に検出された動作データの検出波形パターンを模式的に示す図である。図3Bに示されるように、作業者Mが所定の作業を行なうと、図3Aに示す基本波形パターン200A、210A、220A・・・に類似した検出波形パターン200B、210B、220B・・・がセンサユニット20によって検出される。また、各検出波形パターン200B、210B、220B・・・の間隔には、ランダムな検出波形パターン230B、240Bが検出される。検出波形パターン200B、210B、220B・・・は、各作業者M1〜Mnの体格、筋力の差違によって少しずつ異なる加速度が検出されるため、波形パターンとしては似ているが、加速度の検出レベルや動作時間が少しずつ異なる。また、各作業者M1〜Mnが作業を行なう場合、例えば、各作業動作の間あるいは作業中に咳きやクシャミをしたり、肩こりをほぐすための体操をしたり、といった所定の動作以外の突発的な動作を行なう場合がある。
【0037】
このような所定の動作以外の動作を検出したときのセンサ信号は、所定の動作以外の突発的な動作を行ったものとして記憶装置80に格納する。
【0038】
また、検出波形パターン200B、210B、220B・・・に含まれる高周波帯域(ノイズ成分)のセンサ信号は、ローパスフィルタを用いることで除去されて波形整形される。
【0039】
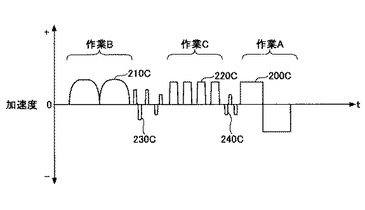
図3Cは動作データからノイズ成分を除去した検出波形パターンを模式的に示す図である。図3Cに示されるように、検出波形パターン200B、210B、220B・・・に含まれる高周波成分を除去して波形整形処理を行なうと、ノイズが除去された検出波形パターン200C、210C、220C・・・が得られる。また、各検出波形パターン200C、210C、220C・・・の間隔には、各動作の基本波形パターンと異なる不規則的な検出波形パターン230C、240Cが検出される。この不規則的な検出波形パターン230C、240Cは、例えば、各動作間の移行過程での前述した突発的な動作を行った場合が考えられる。
【0040】
このようにセンサ信号を波形整形した検出波形パターン200C、210C、220C、230C、240C・・・では、ノイズ成分となる高周波帯域がないので、波形の輪郭が比較的滑らかな連続した線で表せる。そのため、検出波形パターン200C、210C、220C、230C、240C・・・を基本波形パターン200C’、210C’、220C’、230C’、240D’・・・として登録することで、動作検出時の検出波形パターンとの比較が容易となり、動作の判定処理も効率良く行える。
【0041】
また、所定の動作以外の動作が検出されたときは、作業の時刻、その製品のロット番号、作業者のIDとともに記憶装置80に格納する。そのため、例えば、工程の最後に、製品の抜き取り検査を行なう際には、この突発的な動作の記録に基づいて、所定の動作以外の動作が多く記録されているロットを重点的に検査する等して、不良品の発生の原因を特定して不良率を抑えることができる。
【0042】
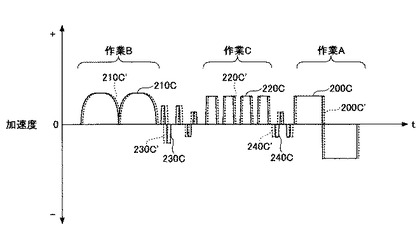
図3Dは検出波形パターンに類似する基本波形パターンを重ねわせた比較処理を模式的に示す図である。図3Dに示されるように、実線で示す検出波形パターン200C、210C、220C・・・に破線で示す基本波形パターン200C’、210C’、220C’・・・を重ね合わせると、略両波形パターンが一致することが分かる。従って、検出波形パターン200C、210C、220C、230C、240C・・・と時間軸方向に僅かにずれが生じるもののほぼ一致する基本波形パターン200C’、210C’、220C’、230C’、240D’・・・がデータベースに登録されている場合には、作業者Mが予め決められた所定の作業動作を予め決められた所定の手順で行なっているものと判定することができる。また、検出波形パターン200C、210C、220C・・・と一致する基本波形パターン200C’、210C’、220C’・・・がデータベースに登録されていないときは、作業者Mが予め決められた所定の作業動作と異なる動作をしているものと判定することが可能になる。
【0043】
また、各検出波形パターン200C、210C、220C・・・の間隔は、一の作業動作から他の作業動作に移行するための時間帯であるので、不規則的な検出波形パターン230C’、240C’が検出される。この検出波形パターン230C’、240C’は、所定の作業動作と異なるので、検出波形パターン230C、240Cとは一致しない。そのため、検出波形パターン230C、240Cは、所定の作業動作以外の動作を検出した非作業動作成分であることを判定できる。
【0044】
ここで、管理コンピュータ40によって設定される各作業者Mのタスクデータについて説明する。
【0045】
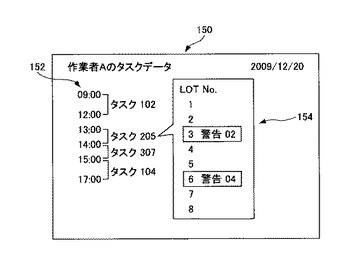
図4Aは管理コンピュータに入力された各作業者のタスクデータの表示例を模式的に示す図である。図4Aに示されるように、管理コンピュータ40のモニタ120の表示画面150には、入力手段110の操作によって指定された作業者Mのタスクデータが表示される。
【0046】
表示画面150の左側表示領域には、タイムスケジュール152が表示される。タイムスケジュール152には、作業者Mのタスクデータとして、その日の作業時間に対する作業内容として設定されたタスク番号が表示される。さらに、タイムスケジュール152の中のタスク番号が入力手段により選択されると、当該タスク番号の右側表示領域にロット番号表示欄154が表示される。ロット番号表示欄154には、当該タスク番号の作業によって生産されたロット番号と、各ロット番号に対する警告の有無が表示される。ロット番号表示欄154に警告を表示された場合、例えば、当該作業者Mが13時〜14時の間に生産されたロット番号3,6の製品に対する作業の中で作業者Mが所定の動作と異なる動作で作業したことが分かる。
【0047】
管理コンピュータ40は、後述するように検出波形パターンと一致する基本波形パターンがデータベースに登録されていないと判定した場合は、当該作業者Mが予め決められた作業内容と異なる作業内容を行なったか、あるいは異なる手順で作業した場合であるので、警告を発する。このように、管理コンピュータ40のオペレータは、モニタ120の表示画面150を確認することで、各作業者の作業ミスを発見することが可能になると共に、作業完了した製品に不具合が発生しているか否かも分かるので、製品の不良が発生した場合の原因を容易に検証することができる。
【0048】
また、病院や介護施設の場合には、看護師または介護士が誤った作業で看護、または介護を行なっているか否かを判定することが可能になり、警告が表示されていないときは、所定の看護、または介護が適正に行なわれており、警告が表示されたときは所定の看護、または介護が適正に行なわれていないことが分かる。また、ロット番号表示欄154に警告が表示されている場合には、間違った作業方法を行なった可能性が高いので、オペレータは警告のあった看護、または介護を直ちにやり直すように連絡することが可能になる。
【0049】
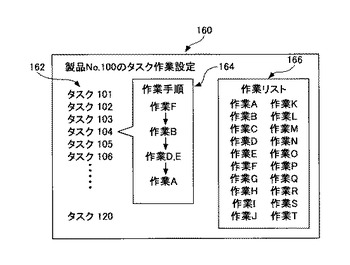
図4Bは管理コンピュータに入力操作される各タスク作業設定画面の表示例を模式的に示す図である。図4Bに示されるように、管理コンピュータ40により各タスクの作業手順を設定する際は、入力手段110によりタスク作業設定画面160を選択する。タスク作業設定画面160は、左側表示領域にタスク番号一覧162が表示される。そして、タスク番号一覧162の中から作業設定操作を行なうタスク番号を入力手段110により指定すると、タスク作業設定画面160の中央表示領域に作業手順欄(作業F、作業B、作業D,E、作業A)164が表示される。この作業手順欄164を用いて入力手段110の操作により、任意の作業を追加または削除したり、他の作業と入れ替えたりすることができる。
【0050】
タスク作業設定画面160の右側表示領域には、各作業A〜Tのアイコンが表示された作業リスト166が表示される。管理コンピュータ40のオペレータは、例えば、タッチパネルまたはマウスなどにより任意のアイコンをドラッグ操作して作業リスト166から作業手順欄164に移動させるだけで、任意の作業A〜Tの何れかを作業手順の中に設定登録することが可能になる。
【0051】
このように、管理コンピュータ40において、各タスク毎の作業手順を設定することができるので、作業内容が変更された場合でも容易に各タスクも作業手順を修正することが可能である。
【0052】
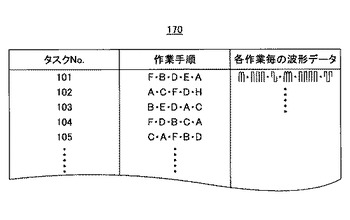
図5は管理コンピュータの記憶装置に格納されたタスクデータベースを模式的に示す図である。図5に示されるように、管理コンピュータ40の記憶装置80には、タスクデータベース170が格納されている。タスクデータベース170は、各タスク番号毎に作業手順(作業A〜T)が設定登録されており、且つ設定された各作業に対応するセンサ信号の波形データ(基本波形パターン)が登録されている。
【0053】
従って、管理コンピュータ40では、センサユニット20から送信されたセンサ信号の検出波形パターンと、予めタスクデータベース170に登録されている各タスク毎の波形データ(基本波形パターン)とを比較することにより、当該作業者Mが所定の作業を正確に行なっているいか否かを判定することが可能になり、比較結果が一致しない場合に警告を発することができる。
【0054】
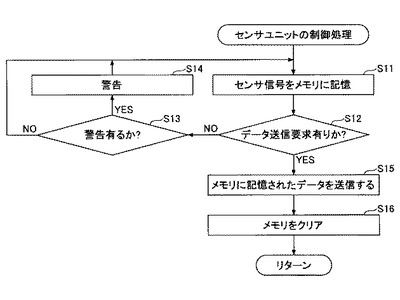
ここで、上記センサユニット20の制御部21が実行する制御処理を説明する。図6はセンサユニットの制御部が実行する制御処理を説明するためのフローチャートである。
【0055】
図6に示されるように、センサユニット20の制御部21は、作業者Mが動作するのに伴って手足に装着された各センサユニット20A〜20Dの加速度センサ22により検出されたセンサ信号を逐次メモリ25に記憶させる。メモリ25に記憶されたセンサ信号のデータは、検出された時刻と共に記憶される。
【0056】
次のS12では、管理コンピュータ40からデータ送信要求信号が入力されたか否かをチェックする。S12において、データ送信要求信号が入力されない場合(NOの場合)、S13に進み、管理コンピュータ40から警告信号が入力されたか否かをチェックする。
【0057】
S13において、警告信号が入力された場合(YESの場合)、S14に進み、報知手段24より警告音(アラーム)を発生させるか、あるいは発光ダイオードを点灯または点滅させて当該作業者Mに決められた所定の作業を行なうように注意を促す。また、S14において、警告信号が入力されない場合(NOの場合)、S14の処理を省略してS11の処理に戻り、加速度センサ22により検出されたセンサ信号をメモリ25に記憶させる。
【0058】
また、上記S12において、データ送信要求信号が入力された場合(YESの場合)、S15に進み、メモリ25に記憶されたセンサ信号の全てを無線通信部23より無線信号として送信させる。無線通信部23から送信されたセンサ信号のデータは、無線通信装置501〜50nのうち最も近い位置に設けられた無線通信装置50によって受信され、通信回線60及びルータ70を介して管理コンピュータ40の記憶装置80に転送される。
【0059】
次のS16では、メモリ25をクリアにする。これにより、メモリ25の容量をできるだけ小さくすることが可能になる。メモリ25の最大記憶容量としては、例えば、作業者Mが8時間作業した場合に加速度センサ22から出力されるセンサ信号のデータ量の合計値に相当する記憶容量があれば良い。また、メモリ25の最小記憶容量としては、管理コンピュータ40からのデータ送信要求信号が10秒間隔で送信されるように設定されている場合は、10秒間に加速度センサ22から出力されるセンサ信号のデータ量の合計値に相当する記憶容量があれば良い。
【0060】
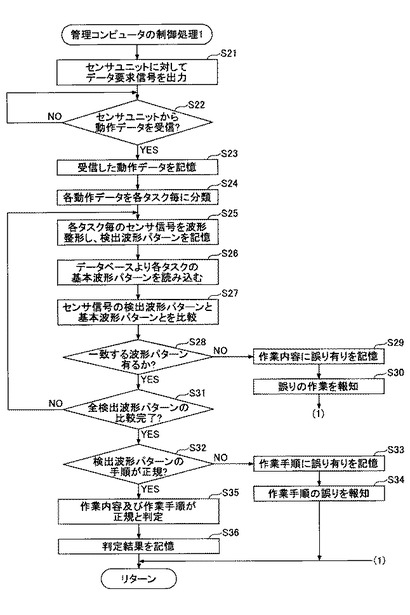
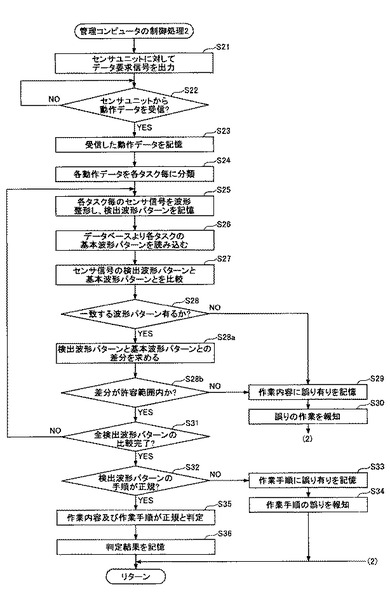
次に管理コンピュータ40が実行する制御処理について説明する。図7は管理コンピュータが実行する制御処理を説明するためのフローチャートである。尚、管理コンピュータ40は、複数の作業者M1〜Mnに装着された各センサユニット20により検出された動作データを管理している。そして、各センサユニット20に対して順々にデータ要求を行なうと共に、図7に示す制御処理を所定時間毎に繰り返し実行して受信された動作データに対する判定処理を逐次行なう。
【0061】
管理コンピュータ40は、図7のS21で作業者M1〜Mnに装着された各センサユニット20に対して順次データ要求信号を出力する。作業者M1〜Mnに装着された各センサユニット20は、データ要求信号が入力されると、メモリ25に記憶した加速度センサ22により検出されたセンサ信号による動作データを無線信号に変換して近くに配された無線通信装置50に送信する。これにより、無線通信装置50で受信されたセンサ信号による動作データは、通信回線60を介して管理コンピュータ20のルータ70に転送される。
【0062】
次のS22では、データ要求された当該センサユニット20からの動作データを受信したか否かをチェックする。S22において、当該センサユニット20からの動作データ200B、210B、220B・・・(図3Bを参照)を受信した場合(YESの場合)、S23に進み、受信した当該動作データを記憶装置80に記憶する。
【0063】
次のS24では、記憶装置80に記憶した当該動作データをタスク別に分類する。これにより、当該動作データがどのタスクに対応しているのかを容易に判別することが可能になる。
【0064】
続いて、S25に進み、各タスク毎の動作データの検出波形パターン200B、210B、220B・・・を波形整形してノイズ成分を除去(図3Cを参照)した検出波形パターン200C、210C、220C・・・を記憶装置80に記憶させる。そして、S26では、データベース170に登録された該当するタスクの基本波形パターン200C’、210C’、220C’・・・(図3Cを参照)を読み込む。次のS27で当該動作データの検出波形パターン200C、210C、220C・・・と基本波形パターン200C’、210C’、220C’・・・とを比較する(図3Dを参照:第1の比較手段)。
【0065】
S28において、当該動作データの検出波形パターン200C、210C、220C・・・と基本波形パターン200C’、210C’、220C’・・・との比較結果として検出波形パターンとほぼ一致する基本波形パターンがあるか否かをチェックする。S28において、検出波形パターンがほぼ一致する基本波形パターンがないときは(NOの場合)、S29に進み、作業内容に誤りがあるとの判定結果を記憶装置80に記憶させる(第1の判定手段)。これにより、表示画面150に警告を表示させることが可能になる(図4Aを参照)。
【0066】
また、S30では、当該センサユニット20に対して作業内容に誤りがあることを報知する警告信号を送信する。これにより、当該センサユニット20の報知手段24では、小型スピーカから警告音を発したり、あるいは発光ダイオードの点灯または点滅による警告を行なって作業者Mに報知する。そのため、作業者Mは、現在の作業に誤りがあるか否かを自ら検証して作業を正規の作業に修正することができる。
【0067】
また、上記S28において、検出波形パターンとほぼ一致する基本波形パターンがある場合(YESの場合)は、上記S29、S30の処理を省略してS31に進む。
【0068】
次のS31では、全検出波形パターンの比較処理が完了したか否かをチェックする。S31において、比較処理を行なっていない他の検出波形パターンが残っている場合(NOの場合)、上記S25に戻り、S25〜S31の処理を繰り返す。また、S31において、全検出波形パターンの比較処理が完了している場合(YESの場合)、S32の処理に進む。
【0069】
S32では、検出波形パターンの手順(図3Cを参照)が正規の手順(図3Aを参照)と一致するか否かをチェックする。S32において、検出波形パターンの手順が正規の手順と一致しない場合(NOの場合)、S33に進み、当該タスク番号の作業手順に誤りが有るとの判定結果を記憶装置80に記憶させる(第1の判定手段)。続いて、S34に進み、当該センサユニット20に対して作業手順に誤りがあることを報知する警告信号を送信する。これにより、当該センサユニット20の報知手段24では、小型スピーカから警告音を発したり、あるいは発光ダイオードの点灯または点滅による警告を行なって作業者Mに報知する。そのため、作業者Mは、現在の作業手順に誤りがあるか否かを自ら検証して作業を正規の作業手順に修正することができる。
【0070】
また、上記S32において、出波形パターンの手順が正規の手順と一致した場合(YESの場合)は、上記S33、S34の処理を省略してS35に進む。
【0071】
S35では、当該作業者Mの動作データによる作業内容及び作業手順が正規であると判定する(第1の判定手段)。続いて、S36に進み、当該作業者Mの動作データによる作業内容及び作業手順が正規であるとの判定結果を記憶装置80に記憶させる。
【0072】
このように、各センサユニット20の加速度センサ22により検出されたセンサ信号を詳細に検証するのではなく、当該動作データの検出波形パターン200C、210C、220C・・・と基本波形パターン200C’、210C’、220C’・・・との比較結果に基づいて判定結果を得るため、データ処理が大幅に減少して判定結果を短時間で導出することが可能になる。そのため、波形パターン不一致との判定結果が得られた場合には、作業者Mに対して現在の作業に対する警告を発することで、作業者M自身が現在行なっている作業を見直して誤りを修正することが可能になる。
【0073】
また、管理者や作業チームリーダが管理コンピュータ20のモニタ120に表示される表示画面150に警告を確認することで、各作業者M1〜Mnの作業内容及び作業手順を検証することが可能になるので、製品不良が発生した場合に直ちに原因を究明して対策を講じることが可能になる。
【0074】
次に変形例について説明する。
【0075】
〔変形例1〕
図8は管理コンピュータが実行する変形例1の制御処理を説明するためのフローチャートである。図8において、前述した図7と同一処理の説明を省略し、異なる処理S28a、S28bについて説明する。
【0076】
S28において、両波形パターンが一致した場合(YESの場合)は、S28aに進み、各作業者Mの個体差によるセンサ信号のばらつきを考慮して当該検出波形パターン200C、210C、220C・・・と当該検出波形パターンの基本波形パターン200C’、210C’、220C’・・・との差分を演算する。尚、差分を演算する際は、例えば、検出波形パターン200C、210C、220C・・・のピーク値と基本波形パターン200C’、210C’、220C’・・・のピーク値との差分を演算しても良いし、あるいは検出波形パターン200C、210C、220C・・・の平均値と基本波形パターン200C’、210C’、220C’・・・の平均値との差分を演算しても良い。
【0077】
次のS28bでは、当該検出波形パターンと基本波形パターンとの差分が許容範囲(例えば、10%〜15%)内か否かをチェックする。S28bにおいて、当該検出波形パターンと基本波形パターンとの差分が許容範囲を越えた場合(NOの場合)、両波形パターンの差が大きいので上記S29に進み、作業内容に誤りがあるとの判定結果を記憶装置80に記憶させる。そして、S30では、当該センサユニット20に対して作業内容に誤りがあることを報知する警告信号を送信する。
【0078】
また、S28bにおいて、当該検出波形パターン200C、210C、220C・・・と基本波形パターン200C’、210C’、220C’・・・との差分が許容範囲内の場合(YESの場合)、上記S31に進み、全検出波形パターンの比較処理が完了したか否かをチェックする。S31において、比較処理を行なっていない他の検出波形パターンが残っている場合(NOの場合)、上記S25に戻り、S25〜S31の処理を繰り返す。
【0079】
このように、S28bにおいて、当該検出波形パターン200C、210C、220C・・・と基本波形パターン200C’、210C’、220C’・・・との差分が許容範囲に入っているかを判定することより、当該検出波形パターンの精度を規定することが可能になり、許容範囲の設定値によって精度をより高めることが可能になる。
【0080】
〔変形例2〕
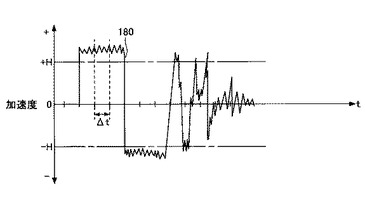
図9Aはセンサ信号の波形に対する閾値を設定した場合を模式的に示す図である。図9Bはセンサ信号の波形が閾値以上である場合に微小単位時間当たりの矩形波を生成する場合を模式的に示す図である。図9Aに示されるように、センサ信号の波形180に対して閾値±Hを設定する。尚、閾値±Hは、センサ信号の最大値に合わせて任意の値に設定される。
【0081】
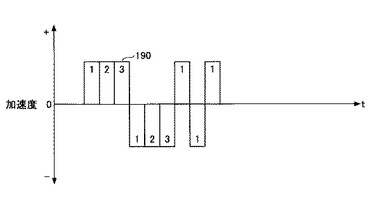
また、センサ信号の波形180を所定時間Δt毎(例えば、0.1〜1秒毎)に閾値±Hとの比較を行なうことにより、図9Bに示されるように、閾値±Hを高さとする所定時間Δtの幅を有する矩形波190が生成される。矩形波190は、所定時間Δt毎にカウントすることで検出波形パターンに応じたカウント値が得られる。例えば、矩形波190のカウント値は、+3、−3、+1、−1、+1となる。この場合、矩形波190のカウント値「+3、−3」が作業したときの数値で、他のカウント値「+1、−1、+1」は、ノイズ成分を表す。
【0082】
このように、作業の種別によって矩形波のカウント値が異なる。そして、予め基本波形パターンも矩形波に変換することで、基本波形パターンを矩形波カウント値に変換して数値化することができる。そのため、基本波形パターンを矩形波カウント値と検出波形パターンの矩形波カウント値とを比較することで、容易に判定結果が得られる。従って、判定結果は、基本波形パターンを矩形波カウント値と検出波形パターンの矩形波カウント値とが一致した場合には、作業者Mが正規の作業を行なっていると判定され、両カウント値が不一致の場合には、作業者Mが誤った作業を行なっている可能性が高いと判定することができる。
【0083】
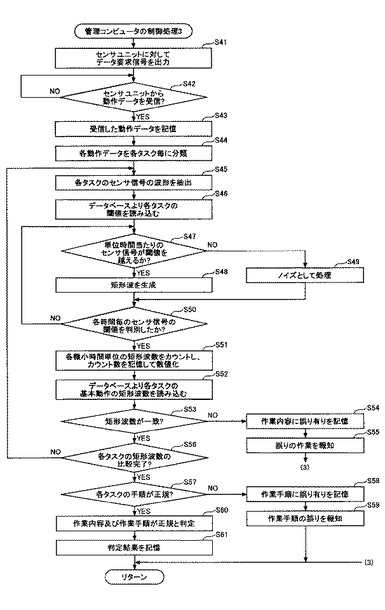
ここで、管理コンピュータ20が実行する当該変形例の制御処理について説明する。図10は管理コンピュータが実行する変形例2の制御処理を説明するためのフローチャートである。図10中、S41〜S44は、前述したS21〜S24の処理と同じなので、説明を省略する。
【0084】
S45では、各タスクのセンサ信号の検出波形を抽出する。続いて、S46に進み、記憶装置80に記憶された各タスクの閾値を読み込む。次のS47では、センサ信号の波形を微小単位時間ΔT毎(例えば、0.1〜1秒毎)に区切って閾値±Hを越えるか否かをチェックする(図9Aを参照:第2の比較手段)。S47において、微小単位時間Δt毎に区切られたセンサ信号の波形が閾値±Hを越えた場合(YESの場合)、S48に進み、微小単位時間Δt毎の矩形波を生成する。
【0085】
また、S47において、微小単位時間ΔT毎に区切られたセンサ信号の波形が閾値±Hを越えない場合(NOの場合)、S49に進み、当該微小単位時間Δtのセンサ信号をノイズ成分と判定して除去する。
【0086】
次のS50では、S45で抽出されたセンサ信号の全てを微小単位時間Δt毎に区切って閾値±Hとの比較を完了したか否かをチェックする。S50において、抽出されたセンサ信号の全てを微小単位時間Δt毎に区切って閾値±Hとの比較を完了していないときは(NOの場合)、上記S47に戻り、S47以降の処理を繰り返す。また、S50において、抽出されたセンサ信号の全てを微小単位時間Δt毎に区切って閾値±Hとの比較を完了したときは(YESの場合)、S51に進む。
【0087】
S51では、微小単位時間Δt毎に区切られた矩形波数Nbをカウントし、カウント値を記憶装置80に記憶させてセンサ信号の波形を数値化する(図9Bを参照)。続いて、S52に進み、当該センサ信号に対応するタスクの基本波形パターンの矩形波数(カウント値)Naを記憶装置80から読み込む。
【0088】
次のS53では、計測された矩形波数Nbと予め設定された基本波形パターンの矩形波数Naとが一致するか否かをチェックする(第3の比較手段)。S53において、計測された矩形波数Nbと基本波形パターンの矩形波数Naとが不一致の場合(NOの場合)、S54に進み、作業内容に誤りがあるとの判定結果を記憶装置80に記憶させる(第2の判定手段)。これにより、表示画面150に警告を表示させることが可能になる(図4Aを参照)。
【0089】
また、S55では、当該センサユニット20に対して作業内容に誤りがあることを報知する警告信号を送信する。
【0090】
また、上記S53において、計測された矩形波数Nbと基本波形パターンの矩形波数Naとが一致した場合(YESの場合)、S56に進み、当該作業者Mの各タスクの矩形波の比較が完了したか否かをチェックする。S56において、当該作業者Mの各タスクの矩形波の比較が完了していないときは(NOの場合)、上記S45に戻り、S45以降の処理を再度繰り返す。
【0091】
また、上記S56において、当該作業者Mの各タスクの矩形波の比較が完了したときは(YESの場合)、S57〜S61(S60の処理は、第2の判定手段に相当する)の処理を実行する。尚、S57〜S61の処理は、前述したS32〜S36の処理と同様なため、説明を省略する。
【0092】
このように、本変形例では、センサ信号の波形パターンを矩形波に変換して矩形波数をカウントして数値化したデータ(矩形波数Na、Nb)に基づいて作業が適正に行なわれているかを判定することが可能になり、判定効率をより一層高めることが可能になる。
【0093】
〔変形例3〕
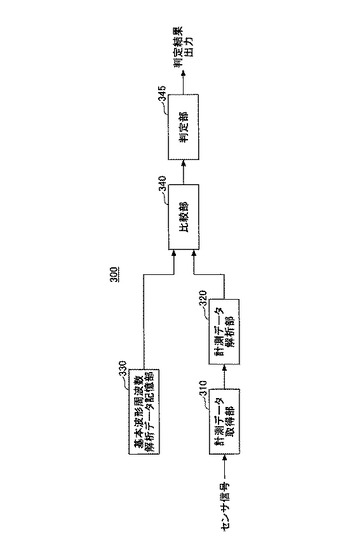
図11は変形例3の制御系を示すブロック図である。図11に示されるように、変形例3の作業管理システム300は、計測データ取得部310と、計測データ解析部320と、基本波形周波数解析データ記憶部330と、比較部(第4の比較手段)340と、判定部345(第3の判定手段)とを有する。計測データ取得部310は、各センサユニット20の加速度センサ22により検出されたセンサ信号(検出波形)を取得し、当該センサ信号を計測データ解析部320に出力する。
【0094】
計測データ解析部320は、センサ信号を高速フーリエ変換(Fast Fourier Transform)することにより、各作業毎の周波数特性を有するFFT波形を導出する。センサ信号を高速フーリエ変換して得られる周波数特性のFFT波形は、特定の周波数で複数のピーク値を持つスペクトラムとして表せる。
【0095】
基本波形周波数解析データ記憶部330は、各タスク毎の作業の基本波形となるセンサ信号を高速フーリエ変換した基本FFT波形を解析データとして記憶しており、計測データ解析部320で解析した各作業に対応する基本解析データ(FFT波形)を抽出して比較部340に入力する。また、基本波形周波数解析データ記憶部330に記憶される解析データとしては、各作業の種別毎に基本動作データとして予め計測された周波数関数f1m(f、x)〜fnm(f、x)を記憶するようにしても良い。尚、(f、x)は周波数fと波高値xの関数であることを示している。
【0096】
比較部340では、計測データ解析部320で高速フーリエ変換して得られる周波数特性の計測FFT波形と、基本波形周波数解析データ記憶部330から入力された基本解析データの基本FFT波形とを比較して周波数の第1ピーク値、第2ピーク値、第3ピーク値のそれぞれが一致するかを段階的に比較し、その比較結果を出力する。尚、本実施例においては、計測データ解析部320で得られた計測スペクトラムの周波数特性を基本スペクトラムと比較して周波数の第1ピーク値、第2ピーク値、第3ピーク値が全て一致した場合に当該作業の動作データが予め設定された基本動作と一致したものと判定する。従って、センサ信号を高速フーリエ変換して得られる周波数特性のFFT波形は、複数のピーク値を有しているが、比較結果を出力するまでの時間を短縮するため、第4ピーク値以下は比較しないこととする。
【0097】
ここで、センサ信号を高速フーリエ変換して解析する過程について説明する。
【0098】
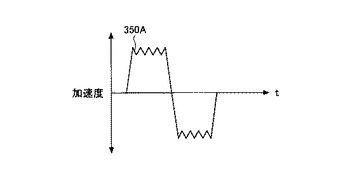
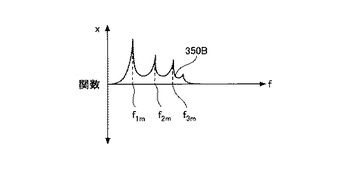
図12AはFFT変換前の基本波形パターンを示す波形図である。図12BはFFT変換後の基本波形パターンの周波数特性を示す波形図である。
【0099】
図12Aに示す、センサ信号の基本波形350Aを高速フーリエ変換すると、図12Bに示す周波数特性を有する基本FFT波形350Bとなる。この高速フーリエ変換後の基本FFT波形350Bは、基本波形周波数解析データ記憶部330に予め格納されており、異なる周波数f1m、f2m、f3mがピーク値(波高値x)となる波形である。また、周波数f1m、f2m、f3mによるピーク値(波高値x)の合計値に対して、各周波数特性を示すピーク値の割合は第1ピークが最大(1番)で、第2ピークが2番、第3ピークが3番となるが、第3ピーク以降のピーク値が大幅に減少する。
【0100】
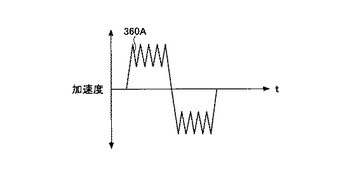
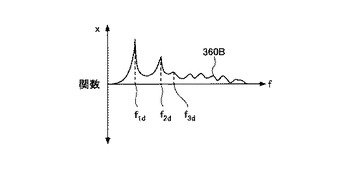
図13AはFFT変換前の検出波形パターンを示す波形図である。図13BはFFT変換後の検出波形パターンの周波数特性を示す波形図である。
【0101】
図13Aに示す、センサ信号の計測波形360Aを高速フーリエ変換すると、図13Bに示す周波数特性を有する計測FFT波形360Bとなる。この高速フーリエ変換後の計測FFT波形360Bは、計測データ解析部320で高速フーリエ変換されて得られた計測データであり、周波数f1d、f2d、f3dがピーク値(波高値x)となる波形である。
【0102】
そして、比較部340では、基本FFT波形350Bと計測FFT波形360Bとが一致するか比較する。比較部340では、周波数f1m=f1d、f2m=f2d、f3m=f3dの場合に同一であるとの比較結果を判定部345に出力する。判定部345では、周波数f1d、f2d、f3dのうち何れか一つでも不一致の場合には、作業者Mの作業動作がデータベースに格納された基本動作と一致しないことになり、その判定結果を出力する。
【0103】
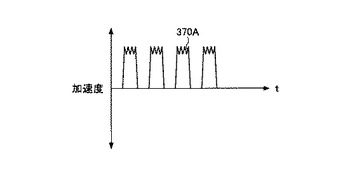
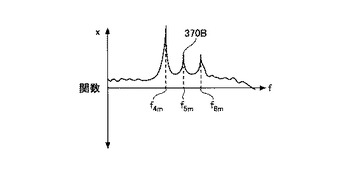
図14AはFFT変換前の別の基本波形パターンを示す波形図である。図14BはFFT変換後の別の基本波形パターンの周波数特性を示す波形図である。
【0104】
図14Aに示す、センサ信号の基本波形370Aを高速フーリエ変換すると、図12Bに示す周波数特性を有する基本FFT波形370Bとなる。この高速フーリエ変換後の基本FFT波形370Bは、基本波形周波数解析データ記憶部330に予め格納されており、異なる周波数f4m、f5m、f6mがピーク値(波高値x)となる波形である。また、周波数f4m、f5m、f6mによるピーク値(波高値x)の合計値に対して、各周波数特性を示すピーク値の割合は第1ピークが最大(1番)で、第2ピークが2番、第3ピークが3番となるが、第3ピーク以降のピーク値が大幅に減少する。
【0105】
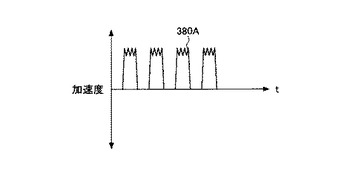
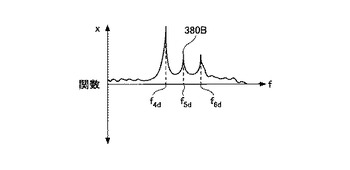
図15AはFFT変換前の別の検出波形パターンを示す波形図である。図15BはFFT変換後の別の検出波形パターンの周波数特性を示す波形図である。
【0106】
図15Aに示す、センサ信号の計測波形380Aを高速フーリエ変換すると、図15Bに示す周波数特性を有する計測FFT波形380Bとなる。この高速フーリエ変換後の計測FFT波形380Bは、計測データ解析部320で高速フーリエ変換されて得られた計測データであり、周波数f4d、f5d、f6dでピーク値(波高値x)となる波形である。
【0107】
そして、比較部340では、基本FFT波形370Bと計測FFT波形380Bとが一致するか比較する。比較部340では、周波数f4m=f4d、f5m=f5d、f6m=f6dの場合に同一であるとの比較結果を判定部345に出力する。周波数f4d、f5d、f6dのうち何れか一つでも不一致の場合には、作業者Mの作業動作がデータベースに格納された基本動作と一致しないことになる。
【0108】
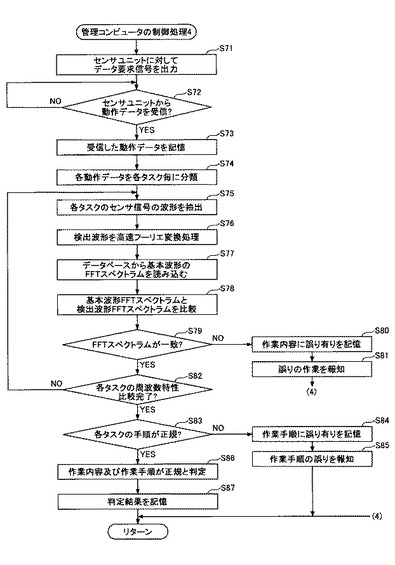
図16は管理コンピュータが実行する変形例3の制御処理を説明するためのフローチャートである。図16中、S71〜S74は、前述したS21〜S24の処理と同じなので、説明を省略する。
【0109】
S75では、各タスクのセンサ信号の検出波形を抽出する。続いて、S76に進み、抽出されたセンサ信号の検出波形を高速フーリエ変換(変換手段)して計測FFT波形360B(または380B)を記憶する(記憶手段)。次のS77では、記憶装置80に格納されたデータベースから基本波形の基本FFT波形350B(または370B)を読み込む。
【0110】
続いて、S78において、計測FFT波形360B(または380B)と基本FFT波形350B(または370B)とを比較する(第4の比較手段)。本実施例では、前述したように周波数f1m=f1d、f2m=f2d、f3m=f3dの場合、(または周波数f4m=f4d、f5m=f5d、f6m=f6dの場合)に同一であると判定する(図12A〜図15Bを参照)。
【0111】
また、各ピーク値となる周波数を段階的に比較し、最終的に第1〜第3のピークの周波数が全て一致した場合に同一であると判定しても良い。例えば、計測FFT波形360B(または380B)と基本FFT波形350B(または、370B)とを比較する場合、例えば、第1ピークである周波数f1mと周波数f1d(または周波数f4mと周波数f4d)とを比較して一致した場合に、第2ピークである周波数f2mと周波数f2d(または周波数f5mと周波数f5d)とを比較する。そして、第2ピークの周波数f2mと周波数f2d(または周波数f5mと周波数f5d)とが一致した場合に、第3ピークである周波数f3mと周波数f3d(または周波数f6mと周波数f6d)とを比較する。第3ピークの周波数f3mと周波数f3d(または周波数f6mと周波数f6d)とが一致した場合には、第1ピークから第3ピークの周波数が全て一致するため、計測FFT波形360B(または380B)と基本FFT波形350B(または370B)とが一致すると判定することができる。
【0112】
また、計測FFT波形と基本FFT波形とを比較する場合、各ピークの波高値xが一致する必要はなく、ピーク値となる各周波数が一致することで、検出波形と基本波形とが一致するものと判定することが可能になる。
【0113】
また、S79において、第1ピークから第3ピークの周波数のうち何れか一つが一致しない場合(NOの場合)、S80に進み、作業内容に誤りがあるとの判定結果を記憶装置80に記憶させる(第4の判定手段)。これにより、表示画面150に警告を表示させることが可能になる(図4Aを参照)。
【0114】
また、S81では、当該センサユニット20に対して作業内容に誤りがあることを報知する警告信号を送信する。これにより、当該センサユニット20の報知手段24では、小型スピーカから警告音を発したり、あるいは発光ダイオードの点灯または点滅による警告を行なって作業者Mに報知する。そのため、作業者Mは、現在の作業に誤りがあるか否かを自ら検証して作業を正規の作業に修正することができる。
【0115】
また、上記S79において、第1ピークから第3ピークの周波数の全てが一致した場合(YESの場合)は、上記S80、S81の処理を省略してS82に進む。
【0116】
S82において、各タスクの周波数特性の比較処理が完了したか否かをチェックしており、まだ比較していないタスクの周波数特性が残っている場合(NOの場合)、S75に戻り、S75以降の処理を繰り返す。また、S82において、各タスクの周波数特性の比較処理が完了したときは(YESの場合)、S83以降の処理を実行する。尚、S83〜S87(S86の処理は第4の判定手段に相当する)の処理は、前述したS32〜S36の処理と同様なため、説明を省略する。
【0117】
このように、加速度センサ22により検出されたセンサ信号を高速フーリエ変換して得られた周波数特性(第1〜第3ピークの周波数)が一致する場合に作業者Mの作業が正規の作業と同じであると判定し、周波数特性(第1〜第3ピークの周波数)が不一致の場合に作業者Mの作業が誤りであると判定することが可能になるため、作業者Mの作業動作の判定精度をより高めることが可能になる。
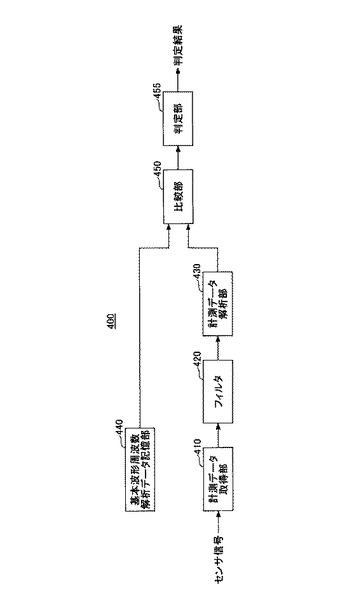
(変形例4)
図17は変形例4の制御系を示すブロック図である。図17に示されるように、変形例4の作業管理システム400は、計測データ取得部410と、フィルタ420と、計測データ解析部430と、基本波形周波数解析データ記憶部440と、比較部450(第5の比較手段)と、判定部455(第4の判定手段)とを有する。計測データ取得部410は、各センサユニット20の加速度センサ22により検出されたセンサ信号(検出波形)を取得し、フィルタ420に当該センサ信号を出力する。
【0118】
フィルタ420は、高周波帯域のノイズ成分を含んだセンサ信号を高速フーリエ変換(Fast Fourier Transform)することにより、ノイズ成分の周波数特性を含むFFT波形を導出する。センサ信号を高速フーリエ変換して得られる周波数特性のFFT波形は、ノイズ成分となる特定の周波数でピーク値を持つスペクトラムとして表せる。
【0119】
計測データ解析部430は、フィルタ420においてノイズ成分の周波数帯域を除くセンサ信号をFFT変換後の検出信号として入力される。従って、計測データ解析部430は、フィルタ420のFFT変換処理によりノイズ成分を除去された作業者Mの作業を計測したセンサ信号を解析処理する。尚、計測データ解析部430の解析処理は、前述した変形例3の計測データ解析部320と同様なので、説明を省略する。
【0120】
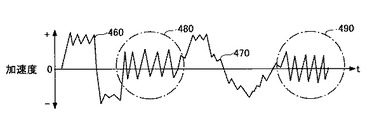
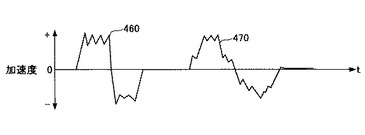
図18AはFFT変換前の検出波形パターンを示す波形図である。図18Aに示されるように、各作業の動作を検出したセンサ信号の検出波形パターン460と470との間には、ノイズ成分480、490が検出されることがある。
【0121】
ノイズ成分480、490は、検出波形パターン460、470と異なる周波数帯域で発生するため、高速フーリエ変換を行なうと、ノイズ成分480、490の周波数特性を含んだスペクトラムで表すことができる。
【0122】
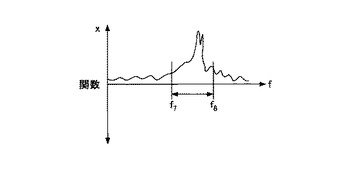
図18BはFFT変換後のノイズ成分480の周波数特性を示す波形図である。図18Bに示されるように、例えば、ノイズ成分480の場合、高速フーリエ変換を行なうと、周波数f7〜f8の周波数帯域でピークとなる周波数特性をもつ波形が導出される。
【0123】
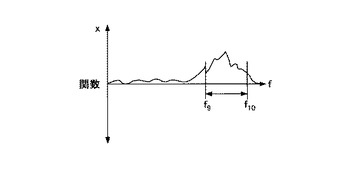
図18CはFFT変換後のノイズ成分の周波数特性を示す波形図である。図18Cに示されるように、例えば、ノイズ成分490の場合、高速フーリエ変換を行なうと、周波数f9〜f10の周波数帯域でピークとなる周波数特性をもつ波形が導出される。
【0124】
そのため、フィルタ420では、図19に示すように、計測データ取得部410で取得されたセンサ信号から周波数f7〜f8の周波数帯域及び周波数f9〜f10の周波数帯域を除く周波数の信号成分を検出波形として計測データ解析部430に出力する。
【0125】
そのため、比較部450においては、ノイズ成分480、490が除去されたセンサ信号と、基本波形周波数解析データ記憶部440から読み出された基本波形とを比較して、比較結果を判定部455に出力する。このように、比較部450では、ノイズ成分480、490の影響を受けないで比較することができるので、ノイズ成分480、490による誤検出がなくなり、その後の判定部455の判定処理による作業の判定結果の精度をより一層高めることが可能になる。
【産業上の利用可能性】
【0126】
上記実施例では、作業者Mの手足に装着されたセンサユニット20によって作業者Mの作業動作を検出する場合について説明したが、これに限らず、例えば、作業者Mの作業服に各センサユニットを縫いつける構成としても良い。
【0127】
また、各作業者Mに装着されたセンサユニットの数を4個以上に増やして各関節の動きを個別に検出し、各関節の動きから作業者Mの作業が適正か否かを判定することも可能である。
【0128】
また、上記実施例では、作業者Mの作業を管理する作業管理システムとして説明したが、これに限らず、工場以外の場所、施設(例えば、病院、介護施設、物流倉庫等で働く者、あるいは鉄道、トラックやバスなどの車両の運転者、牧場や農場で働く者)を管理する場合にも本発明を適用することができるのは勿論である。
【符号の説明】
【0129】
10 作業管理システム
20(20A〜20D) センサユニット
21 制御部
22 加速度センサ
23 無線通信部
24 報知手段
25 メモリ
27 リストバンド
30 無線通信システム
40 管理コンピュータ
42 データ取得部
44 データ分類部
46 動作判定部
48 出力部
501〜50n 無線通信装置
60 通信回線
70 ルータ
80 記憶装置
90 通信モデム
100 ホストコンピュータ
120 モニタ
130 センサユニット読み取り装置
131〜134 データ読み取り部
150 表示画面
152 タイムスケジュール
154 ロット番号表示欄
160 タスク作業設定画面
162 タスク番号一覧
164 作業手順欄
166 作業リスト
170 タスクデータベース
180 波形
190 矩形波
200A〜200C、210A〜210C、220A〜220C 基本波形パターン
300、400 作業管理システム
310、410 計測データ取得部
320、430 計測データ解析部
330、440 基本波形周波数解析データ記憶部
340、450 比較部
345、455 判定部
350A、370A 基本波形
350B、370B 基本FFT波形
360A、380A 計測波形
360B、380B 計測FFT波形
420 フィルタ
460、470 検出波形パターン
480、490 ノイズ成分
【技術分野】
【0001】
本発明は作業管理システム及び作業管理方法に係り、特に作業者(管理対象者)の作業内容及び作業手順に関する情報をデータベースに格納して作業者の行動を検証するように構成された作業管理システム及び作業管理方法に関する。
【背景技術】
【0002】
例えば、工業製品を組立てる工場や多品種の製品を管理する倉庫、あるいは病院や介護施設などでは、大勢の人が夫々決められた作業マニュアルに沿ってその日に予定された作業を順々に行なっている。このような多数の人が個別の作業を行なう場合、各人が最も効率の良い作業内容及び作業手順で作業を行なうように予め指導されている。
【0003】
このような作業環境においては、作業者が増えると、各作業班の管理者またはチームリーダは、各作業者の細かい作業までみることが難しくなり、不良品の発生や不注意による作業ミスがあった場合に原因究明のための検証に時間がかかっていた。
【0004】
また、作業者の動作結果を解析する作業管理システムとしては、作業者の動作情報を得るための第1センサと、物品の状態を検出する第2センサとから得られた情報を突き合わせることで動作結果を解析する作業管理システムの開発が進められている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−201569号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に記載されたシステムでは、各作業者の動作や作業手順を作業情報として検出しておらず、例えば、作業者が間違った作業を行なって不良品が発生した場合でもその原因を検証することができず、作業者自身が作業内容、または作業手順を間違えたことに気付かない場合には、不良品の発生原因が分からないままとなる。
【0007】
また、病院や介護施設などで働く介護士の場合、各人が介護の内容や手順を間違いなく行なっているのかを管理することが難しく、且つ事故が起こらないように注意しながら、効率良く作業する必要があるので、介護の内容を正確に検証できることが要望されている。
【0008】
そこで、本発明は上記事情に鑑み、上記課題を解決した作業管理システム及び作業管理方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するため、本発明は以下のような手段を有する。
(1)本発明は、管理対象者の動作を検出するセンサユニットと、
前記センサユニットにより検出された当該管理対象者のセンサ信号を取得するデータ取得手段と、
前記データ取得手段により取得されたセンサ信号を各動作毎に分類するデータ分類手段と、
前記データ分類手段により分類されたセンサ信号に基づいて動作を判定する動作判定手段と、
前記動作判定手段の判定結果を出力する出力手段と、
を備えたことを特徴とする。
(2)本発明は、管理対象者の動作を検出するセンサユニットと、
前記センサユニットにより検出された当該管理対象者の動作データを取得するデータ取得手段と、
前記データ取得手段により取得された動作データを各動作毎の波形パターンに分類するデータ分類手段と、
前記データ分類手段により分類された波形パターンに基づいて動作を判定する動作判定手段と、
前記動作判定手段の判定結果を出力する出力手段と、
を備えたことを特徴とする。
(3)本発明の前記センサユニットは、
前記管理対象者の動きに応じた加速度を検出する加速度センサと、
前記加速度センサにより検出された動作データを記憶する記憶手段と、
前記記憶手段に記憶された動作データを送信する送信手段と、
を有することを特徴とする。
(4)本発明の前記記憶手段は、前記加速度センサにより検出された加速度の信号波形を記憶することを特徴とする。
(5)本発明の前記データ取得手段は、前記センサユニットにより検出されたセンサ信号を無線信号として取得することを特徴とする。
(6)本発明の前記データ分類手段は、前記センサユニットにより検出されたセンサ信号の波形を各動作に応じたタスク毎のパターンに分類することを特徴とする。
(7)本発明の前記動作判定手段は、
予め設定された各動作に応じたタスク毎の基本波形パターンと前記データ分類手段により分類された前記信号波形の検出波形パターンとを比較する第1の比較手段と、
前記第1の比較手段により両波形パターンが一致した場合に当該検出波形パターンが正規の動作であると判定し、前記両波形パターンが一致しない場合には当該検出波形パターンが正規の動作ではないと判定する第1の判定手段と、
を有することを特徴とする。
(8)本発明の前記第1の比較手段は、前記基本波形パターンと前記検出波形パターンとの差分を求め、当該差分が所定範囲内である場合に両波形パターンが一致しているとし、当該差分が所定範囲外である場合に両波形パターンが不一致とすることを特徴とする。
(9)本発明の前記動作判定手段は、
前記データ分類手段により分類された前記信号波形の出力レベルと予め設定された閾値とを比較する第2の比較手段と、
前記第2の比較手段により前記信号波形の出力レベルが閾値を越える場合に所定時間間隔毎の矩形波を生成する矩形波生成手段と、
前記矩形波生成手段により生成された矩形波をカウントするカウント手段と、
前記カウント手段によりカウントされたカウント値と予め設定された各動作に応じたタスク毎のカウント値とを比較する第3の比較手段と、
前記第3の比較手段により両カウント値が一致した場合に当該検出波形パターンが正規の動作であると判定し、前記両カウント値が一致しない場合には当該検出波形パターンが正規の動作ではないと判定する第2の判定手段と、
を有することを特徴とする。
(10)本発明の前記動作判定手段は、
各作業の基本動作を前記加速度センサにより検出し、前記加速度センサからのセンサ信号を高速フーリエ変換する変換手段と、
前記変換手段による変換結果を記憶する記憶手段と、
前記変換手段により変換された波形の周波数特性と前記記憶手段に記憶された波形の周波数特性とを比較する第4の比較手段と、
前記第4の比較手段により両周波数特性が一致した場合に前記加速度センサからのセンサ信号が正規の動作であると判定し、前記両周波数特性が一致しない場合には当該検出波形パターンが正規の動作ではないと判定する第3の判定手段と、
を有することを特徴とする。
(11)本発明の前記動作判定手段は、
各作業の基本動作を前記加速度センサにより検出し、前記加速度センサからのセンサ信号を高速フーリエ変換する変換手段と、
前記変換手段による変換結果を記憶する記憶手段と、
前記変換手段により変換された波形から基本動作以外の波形を除去するフィルタ手段と、
前記フィルタ手段により除去された波形を除くセンサ信号の周波数特性と前記記憶手段に記憶された波形の周波数特性とを比較する第5の比較手段と、
前記第5の比較手段により両周波数特性が一致した場合に前記加速度センサからのセンサ信号が正規の動作であると判定し、前記両周波数特性が一致しない場合には当該検出波形パターンが正規の動作ではないと判定する第4の判定手段と、
を有することを特徴とする。
(12)本発明の前記出力手段は、前記動作判定手段の判定結果を前記記憶手段に記憶させると共に、モニタに表示させることを特徴とする。
(13)本発明の前記出力手段は、前記動作判定手段の判定結果を通信回線を介して上位コンピュータに送信することを特徴とする。
(14)本発明は、管理対象者の動作をセンサユニットにより検出する過程と、
前記センサユニットにより検出されたセンサ信号を取得する過程と、
前記取得されたセンサ信号を各動作毎の波形パターンに分類する過程と、
前記分類されたセンサ信号に基づいて動作を判定する過程と、
前記動作判定の判定結果を出力する過程と、
を含むことを特徴とする作業管理方法である。
(15)本発明は、管理対象者の動作をセンサユニットにより検出する過程と、
前記センサユニットにより検出された動作データを取得する過程と、
前記取得された動作データを各動作毎の波形パターンに分類する過程と、
前記分類された波形パターンに基づいて動作を判定する過程と、
前記動作判定の判定結果を出力する過程と、
を含むことを特徴とする作業管理方法である。
【発明の効果】
【0010】
本発明によれば、センサユニットにより検出された管理対象者のセンサ信号または動作データを取得し、取得されたセンサ信号または動作データを各動作毎のパターンに分類して各動作毎の波形に基づいて動作を判定するため、各センサユニットによる検出結果のデータ処理量を簡素化して動作判定時間を短縮できると共に、各管理対象者の動作の判定効率を高めて作業管理の精度を向上させることができる。
【0011】
また、本発明によれば、センサユニットにより検出された信号波形を各動作に応じたタスク毎のパターンに分類することにより、各タスク毎の検出波形パターンと基本波形パターンとを比較しやすくなり、比較結果に基づいて作業の適正を判断することが可能になる。
【0012】
また、本発明によれば、信号波形の出力レベルが閾値を越える場合に所定時間間隔毎の矩形波を生成し、生成された矩形波のカウント値と予め設定された各動作に応じたタスク毎のカウント値とを比較することで、管理対象者の動作の判定効率をより一層高めることが可能になる。
【0013】
また、本発明によれば、管理対象者の動作の判定結果を記憶させてあるので、判定結果を検証することが可能になり、予期せぬ事故が発生した場合にも原因の究明を速やかに行なうことができる。
【図面の簡単な説明】
【0014】
【図1】本発明による作業管理システムの一実施例を概念的に示すシステム構成図である。
【図2】複数の作業者が配置された場合のセンサ信号の送受信を行なう通信システムを概念的に示す平面図である。
【図3A】各作業毎の動作データの基本波形パターンを模式的に示す図である。
【図3B】各作業毎に検出された動作データの検出波形パターンを模式的に示す図である。
【図3C】動作データからノイズ成分を除去した検出波形パターンを模式的に示す図である。
【図3D】検出波形パターンに類似する基本波形パターンを重ねわせた比較処理を模式的に示す図である。
【図4A】管理コンピュータに入力された各作業者のタスクデータの表示例を模式的に示す図である。
【図4B】管理コンピュータに入力操作される各タスク作業設定画面の表示例を模式的に示す図である。
【図5】管理コンピュータの記憶装置に格納されたタスクデータベースを模式的に示す図である。
【図6】センサユニットの制御部が実行する制御処理を説明するためのフローチャートである。
【図7】管理コンピュータが実行する制御処理を説明するためのフローチャートである。
【図8】管理コンピュータが実行する変形例1の制御処理を説明するためのフローチャートである。
【図9A】センサ信号の波形に対する閾値を設定した場合を模式的に示す図である。
【図9B】センサ信号の波形が閾値以上である場合に微小単位時間当たりの矩形波を生成する過程を説明するための図である。
【図10】管理コンピュータが実行する変形例2の制御処理を説明するためのフローチャートである。
【図11】変形例3の制御系を示すブロック図である。
【図12A】FFT変換前の基本波形パターンを示す波形図である。
【図12B】FFT変換後の基本波形パターンの周波数特性を示す波形図である。
【図13A】FFT変換前の検出波形パターンを示す波形図である。
【図13B】FFT変換後の検出波形パターンの周波数特性を示す波形図である。
【図14A】FFT変換前の別の基本波形パターンを示す波形図である。
【図14B】FFT変換後の別の基本波形パターンの周波数特性を示す波形図である。
【図15A】FFT変換前の別の検出波形パターンを示す波形図である。
【図15B】FFT変換後の別の検出波形パターンの周波数特性を示す波形図である。
【図16】管理コンピュータが実行する変形例3の制御処理を説明するためのフローチャートである。
【図17】変形例4の制御系を示すブロック図である。
【図18A】FFT変換前の検出波形パターンを示す波形図である。
【図18B】FFT変換後のノイズ成分の周波数特性を示す波形図である。
【図18C】FFT変換後の別のノイズ成分の周波数特性を示す波形図である。
【図19】ノイズ成分を除去された検出波形パターンを示す波形図である。
【発明を実施するための形態】
【0015】
以下、図面を参照して本発明を実施するための形態について説明する。
【実施例1】
【0016】
図1は本発明による作業管理システムの一実施例を概念的に示すシステム構成図である。図2は複数の作業者が配置された場合のセンサ信号の送受信を行なう通信システムを概念的に示す平面図である。
【0017】
図1及び図2に示されるように、作業管理システム10は、管理対象者である各作業者M(M1〜Mn)の手首、足首の装着された複数のセンサユニット20(20A〜20D)から得られた動作データに基づいて各作業者M(M1〜Mn)が所定の作業を行なっていることを管理するシステムである。
【0018】
尚、本実施例において、各作業者M(M1〜Mn)の作業としては、例えば、製品の組立て作業、組立て完了した製品の機能を検査する検査作業、あるいは倉庫などでの製品別の搬送作業、あるいは病院や介護施設での介護作業やリハビリテーション作業などがある。また、センサユニット20は、作業内容に応じて適宜装着位置を変更しても良い。例えば、手の動きを重点的に検出する場合には、足首を無くして左右の手首、肘の夫々にセンサユニット20を配しても良い。
【0019】
作業管理システム10は、センサユニット20(20A〜20D)と、無線通信システム30と、管理コンピュータ40とを有する。センサユニット20(20A〜20D)は、制御部21と、加速度センサ22と、無線通信部23と、報知手段24と、メモリ25と、電池26とがリストバンド27に設けられている。リストバンド27は、各作業者M1〜Mnの手首、足首などの動作する部分に装着しやすいように、軽量且つ柔軟性を有する材質(例えば、防水加工された布)によって形成されている。また、リストバンド27は、装着操作及び分離操作が容易に行えるように例えば、マジックテープ(登録商標)などからなる締結部28が形成されており、各作業者M1〜Mnが作業するときに装着され、作業終了後、あるいは休憩のときは作業者Mから分離される。
【0020】
制御部21、加速度センサ22、無線通信部23、報知手段24、メモリ25は、何れも微小なチップからなり、各作業者M1〜Mnが作業する際の負担にならないように形成されている。加速度センサ22としては、例えば、3軸の加速度を検出可能なセンサチップからなり、各作業者M1〜Mnの手足の動きに応じた加速度を検出し、加速度に応じたセンサ信号を出力する。
【0021】
制御部21は、加速度センサ22から得られた加速度のセンサ信号をメモリ25に記憶させ、管理コンピュータ40からのデータ要求に応じてメモリ25に記憶させたセンサ信号のデータを無線通信部23から無線信号として送信させる。
【0022】
報知手段24は、例えば、小型スピーカ、あるいは発光ダイオードからなり、管理コンピュータ40において、警告信号が出力されると、小型スピーカから警告音を発したり、あるいは発光ダイオードの点灯または点滅による警告を行なう。
【0023】
また、電池26は、板状に形成された充電式バッテリであり、例えば、作業者Mが作業終了、あるいは休憩のため作業室を出たときに、作業室の出入り口付近に設置された充電装置によって充電される。
【0024】
無線通信システム30は、無線LANシステムからなり、各センサユニット20と無線信号によるデータ通信を行なうものであり、複数の無線通信装置501〜50nと、通信回線60と、ルータ70とを有する。複数の無線通信装置501〜50nは、図2中正方形状のシンボルマークで示すように、作業室Rの床面あるいは天井にX、Y方向に所定間隔おきにマトリックス状に設置されており、通信回線60を介して管理コンピュータ40のルータ70に接続されている。各無線通信装置501〜50nは、夫々電波の送受信可能範囲が決められており、各無線通信装置501〜50nの中間位置が境界となるように離間距離(間隔)が設定されている。
【0025】
また、各作業者M1〜Mnは、図2中丸印のシンボルマークで示すように、複数の無線通信装置501〜50nの間に点在するように配置されている。各作業者M1〜Mnは、作業内容(タスク)に応じて適宜作業位置を変更するため、その日の作業スケジュールに応じて各作業位置に移動する。
【0026】
各センサユニット20の無線通信部23は、近接距離無線方式(例えば、ブルートゥース:Bluetoothなど)により複数の無線通信装置501〜50nのうち最も近い位置にある無線通信装置50とデータの送受信を行なう。また、管理コンピュータ40では、センサユニット20から送信された動作データを受信して各作業者M1〜Mnの作業が適正に行なわれているかを判定すると共に、センサ信号を受信した無線通信装置50のアドレスにより動作データを送信したセンサユニット20(または作業者)の位置を確認することができる。
【0027】
管理コンピュータ40は、作業室Rとは別の室に設置されており、作業室Rで作業を行なう複数の作業者Aに装着された各センサユニット20から送信される動作データ(加速度センサ22から出力されたセンサ信号)を記憶装置80に格納する。また、管理コンピュータ40は、記憶装置80に格納された各制御プログラムを読み込んで各種制御処理を実行する。
【0028】
また、管理コンピュータ40は、データ取得部42と、データ分類部44と、動作判定部46と、出力部48とを有する。また、管理コンピュータ40は、無線通信装置501〜50nから送信された各センサユニット20のセンサ信号を検出波形パターンとして記憶装置80に記憶させる。また、記憶装置80には、後述するようにデータベースの他に、各制御プログラムが格納されている。
【0029】
データ取得部42は、無線通信システム30を介して各センサユニット20により検出された作業者(管理対象者)の動作データを取得して記憶装置80に格納する制御手段である。データ分類手段44は、取得された動作データを各タスクの作業毎の波形パターンに分類する制御手段である。
【0030】
動作判定手段46は、分類された作業毎の検出波形パターンと基本波形パターンとを比較して各作業の動作を判定する制御手段である。出力部48は、判定結果をモニタ120や通信モデム90及び通信回線92を介して外部に設置された上位のホストコンピュータ100に出力する制御手段である。
【0031】
また、管理コンピュータ40は、通信用モデム90に接続された通信回線92を介して外部に設置された上位のホストコンピュータ100と通信可能に接続されており、複数のセンサユニット20から取得した各作業者Mの動作データ(センサ信号)を定期的にホストコンピュータ100に転送する。そのため、ホストコンピュータ100が設置されたセンタにおいても、管理コンピュータ20と同様に、各作業者の作業内容や作業手順が適正に行なわれているか否かを検出することができる。
【0032】
さらに、管理コンピュータ40には、入力手段(キーボードやマウス、タッチパネル等)110からの入力信号に応じて各タスクの作業手順を設定すると共に、入力された作業内容をモニタ120に表示する。
【0033】
また、管理コンピュータ40には、センサユニット読み取り装置130が接続されている。センサユニット読み取り装置130は、1人分のセンサユニット20A〜20Dが載置されるデータ読み取り部131〜134を有しており、無線通信装置501〜50nが使用できないとき、あるいはセンサユニット20A〜20Dのメモリ25に格納されたその日のデータを一括して保存する場合に使用される。データ読み取り部131〜134は、夫々楕円形状の凹部に形成されており、載置されたセンサユニット20A〜20Dの無線通信部23を介してメモリ25に格納されたその日の動作データを読み取って記憶装置80に記憶させる。尚、記憶装置80には、後述する図3Cに示すようなフィルタリング後のノイズ除去された検出波形パターン200C、210C、220C・・・の波形が基本波形パターンとして格納される。そして、フィルタリング後の検出波形パターン200C、210C、220C・・・による基本波形パターンと実際に動作したときのフィルタリング後の検出波形とを比較することで所定の作業動作と異なる動作しているものと判定することが可能になる。
【0034】
ここで、加速度センサ22により検出されるセンサ信号のパターンについて説明する。
【0035】
図3Aは各作業毎の動作データの基本波形パターンを模式的に示す図である。図3Aに示されるように、センサユニット20の加速度センサ22は、例えば、各作業A、B、C・・・に応じた動作に応じて検出波形パターン200A、210A、220A・・・のような異なるパターンのセンサ信号を出力する。検出波形パターン200A、210A、220A・・・は、予め作業前に計測した動作データであって、記憶装置80のデータベースに登録されている。尚、ここでは、説明の便宜上、各作業A、B、Cの波形パターンについて説明するが、実際には設定された作業数に応じた数の波形パターンが多数存在する。また、各検出波形パターン200A、210A、220A・・・は、高周波帯域の信号(ノイズ)が重畳されているため、各波形の形状が不鮮明になっている。
【0036】
図3Bは各作業毎に検出された動作データの検出波形パターンを模式的に示す図である。図3Bに示されるように、作業者Mが所定の作業を行なうと、図3Aに示す基本波形パターン200A、210A、220A・・・に類似した検出波形パターン200B、210B、220B・・・がセンサユニット20によって検出される。また、各検出波形パターン200B、210B、220B・・・の間隔には、ランダムな検出波形パターン230B、240Bが検出される。検出波形パターン200B、210B、220B・・・は、各作業者M1〜Mnの体格、筋力の差違によって少しずつ異なる加速度が検出されるため、波形パターンとしては似ているが、加速度の検出レベルや動作時間が少しずつ異なる。また、各作業者M1〜Mnが作業を行なう場合、例えば、各作業動作の間あるいは作業中に咳きやクシャミをしたり、肩こりをほぐすための体操をしたり、といった所定の動作以外の突発的な動作を行なう場合がある。
【0037】
このような所定の動作以外の動作を検出したときのセンサ信号は、所定の動作以外の突発的な動作を行ったものとして記憶装置80に格納する。
【0038】
また、検出波形パターン200B、210B、220B・・・に含まれる高周波帯域(ノイズ成分)のセンサ信号は、ローパスフィルタを用いることで除去されて波形整形される。
【0039】
図3Cは動作データからノイズ成分を除去した検出波形パターンを模式的に示す図である。図3Cに示されるように、検出波形パターン200B、210B、220B・・・に含まれる高周波成分を除去して波形整形処理を行なうと、ノイズが除去された検出波形パターン200C、210C、220C・・・が得られる。また、各検出波形パターン200C、210C、220C・・・の間隔には、各動作の基本波形パターンと異なる不規則的な検出波形パターン230C、240Cが検出される。この不規則的な検出波形パターン230C、240Cは、例えば、各動作間の移行過程での前述した突発的な動作を行った場合が考えられる。
【0040】
このようにセンサ信号を波形整形した検出波形パターン200C、210C、220C、230C、240C・・・では、ノイズ成分となる高周波帯域がないので、波形の輪郭が比較的滑らかな連続した線で表せる。そのため、検出波形パターン200C、210C、220C、230C、240C・・・を基本波形パターン200C’、210C’、220C’、230C’、240D’・・・として登録することで、動作検出時の検出波形パターンとの比較が容易となり、動作の判定処理も効率良く行える。
【0041】
また、所定の動作以外の動作が検出されたときは、作業の時刻、その製品のロット番号、作業者のIDとともに記憶装置80に格納する。そのため、例えば、工程の最後に、製品の抜き取り検査を行なう際には、この突発的な動作の記録に基づいて、所定の動作以外の動作が多く記録されているロットを重点的に検査する等して、不良品の発生の原因を特定して不良率を抑えることができる。
【0042】
図3Dは検出波形パターンに類似する基本波形パターンを重ねわせた比較処理を模式的に示す図である。図3Dに示されるように、実線で示す検出波形パターン200C、210C、220C・・・に破線で示す基本波形パターン200C’、210C’、220C’・・・を重ね合わせると、略両波形パターンが一致することが分かる。従って、検出波形パターン200C、210C、220C、230C、240C・・・と時間軸方向に僅かにずれが生じるもののほぼ一致する基本波形パターン200C’、210C’、220C’、230C’、240D’・・・がデータベースに登録されている場合には、作業者Mが予め決められた所定の作業動作を予め決められた所定の手順で行なっているものと判定することができる。また、検出波形パターン200C、210C、220C・・・と一致する基本波形パターン200C’、210C’、220C’・・・がデータベースに登録されていないときは、作業者Mが予め決められた所定の作業動作と異なる動作をしているものと判定することが可能になる。
【0043】
また、各検出波形パターン200C、210C、220C・・・の間隔は、一の作業動作から他の作業動作に移行するための時間帯であるので、不規則的な検出波形パターン230C’、240C’が検出される。この検出波形パターン230C’、240C’は、所定の作業動作と異なるので、検出波形パターン230C、240Cとは一致しない。そのため、検出波形パターン230C、240Cは、所定の作業動作以外の動作を検出した非作業動作成分であることを判定できる。
【0044】
ここで、管理コンピュータ40によって設定される各作業者Mのタスクデータについて説明する。
【0045】
図4Aは管理コンピュータに入力された各作業者のタスクデータの表示例を模式的に示す図である。図4Aに示されるように、管理コンピュータ40のモニタ120の表示画面150には、入力手段110の操作によって指定された作業者Mのタスクデータが表示される。
【0046】
表示画面150の左側表示領域には、タイムスケジュール152が表示される。タイムスケジュール152には、作業者Mのタスクデータとして、その日の作業時間に対する作業内容として設定されたタスク番号が表示される。さらに、タイムスケジュール152の中のタスク番号が入力手段により選択されると、当該タスク番号の右側表示領域にロット番号表示欄154が表示される。ロット番号表示欄154には、当該タスク番号の作業によって生産されたロット番号と、各ロット番号に対する警告の有無が表示される。ロット番号表示欄154に警告を表示された場合、例えば、当該作業者Mが13時〜14時の間に生産されたロット番号3,6の製品に対する作業の中で作業者Mが所定の動作と異なる動作で作業したことが分かる。
【0047】
管理コンピュータ40は、後述するように検出波形パターンと一致する基本波形パターンがデータベースに登録されていないと判定した場合は、当該作業者Mが予め決められた作業内容と異なる作業内容を行なったか、あるいは異なる手順で作業した場合であるので、警告を発する。このように、管理コンピュータ40のオペレータは、モニタ120の表示画面150を確認することで、各作業者の作業ミスを発見することが可能になると共に、作業完了した製品に不具合が発生しているか否かも分かるので、製品の不良が発生した場合の原因を容易に検証することができる。
【0048】
また、病院や介護施設の場合には、看護師または介護士が誤った作業で看護、または介護を行なっているか否かを判定することが可能になり、警告が表示されていないときは、所定の看護、または介護が適正に行なわれており、警告が表示されたときは所定の看護、または介護が適正に行なわれていないことが分かる。また、ロット番号表示欄154に警告が表示されている場合には、間違った作業方法を行なった可能性が高いので、オペレータは警告のあった看護、または介護を直ちにやり直すように連絡することが可能になる。
【0049】
図4Bは管理コンピュータに入力操作される各タスク作業設定画面の表示例を模式的に示す図である。図4Bに示されるように、管理コンピュータ40により各タスクの作業手順を設定する際は、入力手段110によりタスク作業設定画面160を選択する。タスク作業設定画面160は、左側表示領域にタスク番号一覧162が表示される。そして、タスク番号一覧162の中から作業設定操作を行なうタスク番号を入力手段110により指定すると、タスク作業設定画面160の中央表示領域に作業手順欄(作業F、作業B、作業D,E、作業A)164が表示される。この作業手順欄164を用いて入力手段110の操作により、任意の作業を追加または削除したり、他の作業と入れ替えたりすることができる。
【0050】
タスク作業設定画面160の右側表示領域には、各作業A〜Tのアイコンが表示された作業リスト166が表示される。管理コンピュータ40のオペレータは、例えば、タッチパネルまたはマウスなどにより任意のアイコンをドラッグ操作して作業リスト166から作業手順欄164に移動させるだけで、任意の作業A〜Tの何れかを作業手順の中に設定登録することが可能になる。
【0051】
このように、管理コンピュータ40において、各タスク毎の作業手順を設定することができるので、作業内容が変更された場合でも容易に各タスクも作業手順を修正することが可能である。
【0052】
図5は管理コンピュータの記憶装置に格納されたタスクデータベースを模式的に示す図である。図5に示されるように、管理コンピュータ40の記憶装置80には、タスクデータベース170が格納されている。タスクデータベース170は、各タスク番号毎に作業手順(作業A〜T)が設定登録されており、且つ設定された各作業に対応するセンサ信号の波形データ(基本波形パターン)が登録されている。
【0053】
従って、管理コンピュータ40では、センサユニット20から送信されたセンサ信号の検出波形パターンと、予めタスクデータベース170に登録されている各タスク毎の波形データ(基本波形パターン)とを比較することにより、当該作業者Mが所定の作業を正確に行なっているいか否かを判定することが可能になり、比較結果が一致しない場合に警告を発することができる。
【0054】
ここで、上記センサユニット20の制御部21が実行する制御処理を説明する。図6はセンサユニットの制御部が実行する制御処理を説明するためのフローチャートである。
【0055】
図6に示されるように、センサユニット20の制御部21は、作業者Mが動作するのに伴って手足に装着された各センサユニット20A〜20Dの加速度センサ22により検出されたセンサ信号を逐次メモリ25に記憶させる。メモリ25に記憶されたセンサ信号のデータは、検出された時刻と共に記憶される。
【0056】
次のS12では、管理コンピュータ40からデータ送信要求信号が入力されたか否かをチェックする。S12において、データ送信要求信号が入力されない場合(NOの場合)、S13に進み、管理コンピュータ40から警告信号が入力されたか否かをチェックする。
【0057】
S13において、警告信号が入力された場合(YESの場合)、S14に進み、報知手段24より警告音(アラーム)を発生させるか、あるいは発光ダイオードを点灯または点滅させて当該作業者Mに決められた所定の作業を行なうように注意を促す。また、S14において、警告信号が入力されない場合(NOの場合)、S14の処理を省略してS11の処理に戻り、加速度センサ22により検出されたセンサ信号をメモリ25に記憶させる。
【0058】
また、上記S12において、データ送信要求信号が入力された場合(YESの場合)、S15に進み、メモリ25に記憶されたセンサ信号の全てを無線通信部23より無線信号として送信させる。無線通信部23から送信されたセンサ信号のデータは、無線通信装置501〜50nのうち最も近い位置に設けられた無線通信装置50によって受信され、通信回線60及びルータ70を介して管理コンピュータ40の記憶装置80に転送される。
【0059】
次のS16では、メモリ25をクリアにする。これにより、メモリ25の容量をできるだけ小さくすることが可能になる。メモリ25の最大記憶容量としては、例えば、作業者Mが8時間作業した場合に加速度センサ22から出力されるセンサ信号のデータ量の合計値に相当する記憶容量があれば良い。また、メモリ25の最小記憶容量としては、管理コンピュータ40からのデータ送信要求信号が10秒間隔で送信されるように設定されている場合は、10秒間に加速度センサ22から出力されるセンサ信号のデータ量の合計値に相当する記憶容量があれば良い。
【0060】
次に管理コンピュータ40が実行する制御処理について説明する。図7は管理コンピュータが実行する制御処理を説明するためのフローチャートである。尚、管理コンピュータ40は、複数の作業者M1〜Mnに装着された各センサユニット20により検出された動作データを管理している。そして、各センサユニット20に対して順々にデータ要求を行なうと共に、図7に示す制御処理を所定時間毎に繰り返し実行して受信された動作データに対する判定処理を逐次行なう。
【0061】
管理コンピュータ40は、図7のS21で作業者M1〜Mnに装着された各センサユニット20に対して順次データ要求信号を出力する。作業者M1〜Mnに装着された各センサユニット20は、データ要求信号が入力されると、メモリ25に記憶した加速度センサ22により検出されたセンサ信号による動作データを無線信号に変換して近くに配された無線通信装置50に送信する。これにより、無線通信装置50で受信されたセンサ信号による動作データは、通信回線60を介して管理コンピュータ20のルータ70に転送される。
【0062】
次のS22では、データ要求された当該センサユニット20からの動作データを受信したか否かをチェックする。S22において、当該センサユニット20からの動作データ200B、210B、220B・・・(図3Bを参照)を受信した場合(YESの場合)、S23に進み、受信した当該動作データを記憶装置80に記憶する。
【0063】
次のS24では、記憶装置80に記憶した当該動作データをタスク別に分類する。これにより、当該動作データがどのタスクに対応しているのかを容易に判別することが可能になる。
【0064】
続いて、S25に進み、各タスク毎の動作データの検出波形パターン200B、210B、220B・・・を波形整形してノイズ成分を除去(図3Cを参照)した検出波形パターン200C、210C、220C・・・を記憶装置80に記憶させる。そして、S26では、データベース170に登録された該当するタスクの基本波形パターン200C’、210C’、220C’・・・(図3Cを参照)を読み込む。次のS27で当該動作データの検出波形パターン200C、210C、220C・・・と基本波形パターン200C’、210C’、220C’・・・とを比較する(図3Dを参照:第1の比較手段)。
【0065】
S28において、当該動作データの検出波形パターン200C、210C、220C・・・と基本波形パターン200C’、210C’、220C’・・・との比較結果として検出波形パターンとほぼ一致する基本波形パターンがあるか否かをチェックする。S28において、検出波形パターンがほぼ一致する基本波形パターンがないときは(NOの場合)、S29に進み、作業内容に誤りがあるとの判定結果を記憶装置80に記憶させる(第1の判定手段)。これにより、表示画面150に警告を表示させることが可能になる(図4Aを参照)。
【0066】
また、S30では、当該センサユニット20に対して作業内容に誤りがあることを報知する警告信号を送信する。これにより、当該センサユニット20の報知手段24では、小型スピーカから警告音を発したり、あるいは発光ダイオードの点灯または点滅による警告を行なって作業者Mに報知する。そのため、作業者Mは、現在の作業に誤りがあるか否かを自ら検証して作業を正規の作業に修正することができる。
【0067】
また、上記S28において、検出波形パターンとほぼ一致する基本波形パターンがある場合(YESの場合)は、上記S29、S30の処理を省略してS31に進む。
【0068】
次のS31では、全検出波形パターンの比較処理が完了したか否かをチェックする。S31において、比較処理を行なっていない他の検出波形パターンが残っている場合(NOの場合)、上記S25に戻り、S25〜S31の処理を繰り返す。また、S31において、全検出波形パターンの比較処理が完了している場合(YESの場合)、S32の処理に進む。
【0069】
S32では、検出波形パターンの手順(図3Cを参照)が正規の手順(図3Aを参照)と一致するか否かをチェックする。S32において、検出波形パターンの手順が正規の手順と一致しない場合(NOの場合)、S33に進み、当該タスク番号の作業手順に誤りが有るとの判定結果を記憶装置80に記憶させる(第1の判定手段)。続いて、S34に進み、当該センサユニット20に対して作業手順に誤りがあることを報知する警告信号を送信する。これにより、当該センサユニット20の報知手段24では、小型スピーカから警告音を発したり、あるいは発光ダイオードの点灯または点滅による警告を行なって作業者Mに報知する。そのため、作業者Mは、現在の作業手順に誤りがあるか否かを自ら検証して作業を正規の作業手順に修正することができる。
【0070】
また、上記S32において、出波形パターンの手順が正規の手順と一致した場合(YESの場合)は、上記S33、S34の処理を省略してS35に進む。
【0071】
S35では、当該作業者Mの動作データによる作業内容及び作業手順が正規であると判定する(第1の判定手段)。続いて、S36に進み、当該作業者Mの動作データによる作業内容及び作業手順が正規であるとの判定結果を記憶装置80に記憶させる。
【0072】
このように、各センサユニット20の加速度センサ22により検出されたセンサ信号を詳細に検証するのではなく、当該動作データの検出波形パターン200C、210C、220C・・・と基本波形パターン200C’、210C’、220C’・・・との比較結果に基づいて判定結果を得るため、データ処理が大幅に減少して判定結果を短時間で導出することが可能になる。そのため、波形パターン不一致との判定結果が得られた場合には、作業者Mに対して現在の作業に対する警告を発することで、作業者M自身が現在行なっている作業を見直して誤りを修正することが可能になる。
【0073】
また、管理者や作業チームリーダが管理コンピュータ20のモニタ120に表示される表示画面150に警告を確認することで、各作業者M1〜Mnの作業内容及び作業手順を検証することが可能になるので、製品不良が発生した場合に直ちに原因を究明して対策を講じることが可能になる。
【0074】
次に変形例について説明する。
【0075】
〔変形例1〕
図8は管理コンピュータが実行する変形例1の制御処理を説明するためのフローチャートである。図8において、前述した図7と同一処理の説明を省略し、異なる処理S28a、S28bについて説明する。
【0076】
S28において、両波形パターンが一致した場合(YESの場合)は、S28aに進み、各作業者Mの個体差によるセンサ信号のばらつきを考慮して当該検出波形パターン200C、210C、220C・・・と当該検出波形パターンの基本波形パターン200C’、210C’、220C’・・・との差分を演算する。尚、差分を演算する際は、例えば、検出波形パターン200C、210C、220C・・・のピーク値と基本波形パターン200C’、210C’、220C’・・・のピーク値との差分を演算しても良いし、あるいは検出波形パターン200C、210C、220C・・・の平均値と基本波形パターン200C’、210C’、220C’・・・の平均値との差分を演算しても良い。
【0077】
次のS28bでは、当該検出波形パターンと基本波形パターンとの差分が許容範囲(例えば、10%〜15%)内か否かをチェックする。S28bにおいて、当該検出波形パターンと基本波形パターンとの差分が許容範囲を越えた場合(NOの場合)、両波形パターンの差が大きいので上記S29に進み、作業内容に誤りがあるとの判定結果を記憶装置80に記憶させる。そして、S30では、当該センサユニット20に対して作業内容に誤りがあることを報知する警告信号を送信する。
【0078】
また、S28bにおいて、当該検出波形パターン200C、210C、220C・・・と基本波形パターン200C’、210C’、220C’・・・との差分が許容範囲内の場合(YESの場合)、上記S31に進み、全検出波形パターンの比較処理が完了したか否かをチェックする。S31において、比較処理を行なっていない他の検出波形パターンが残っている場合(NOの場合)、上記S25に戻り、S25〜S31の処理を繰り返す。
【0079】
このように、S28bにおいて、当該検出波形パターン200C、210C、220C・・・と基本波形パターン200C’、210C’、220C’・・・との差分が許容範囲に入っているかを判定することより、当該検出波形パターンの精度を規定することが可能になり、許容範囲の設定値によって精度をより高めることが可能になる。
【0080】
〔変形例2〕
図9Aはセンサ信号の波形に対する閾値を設定した場合を模式的に示す図である。図9Bはセンサ信号の波形が閾値以上である場合に微小単位時間当たりの矩形波を生成する場合を模式的に示す図である。図9Aに示されるように、センサ信号の波形180に対して閾値±Hを設定する。尚、閾値±Hは、センサ信号の最大値に合わせて任意の値に設定される。
【0081】
また、センサ信号の波形180を所定時間Δt毎(例えば、0.1〜1秒毎)に閾値±Hとの比較を行なうことにより、図9Bに示されるように、閾値±Hを高さとする所定時間Δtの幅を有する矩形波190が生成される。矩形波190は、所定時間Δt毎にカウントすることで検出波形パターンに応じたカウント値が得られる。例えば、矩形波190のカウント値は、+3、−3、+1、−1、+1となる。この場合、矩形波190のカウント値「+3、−3」が作業したときの数値で、他のカウント値「+1、−1、+1」は、ノイズ成分を表す。
【0082】
このように、作業の種別によって矩形波のカウント値が異なる。そして、予め基本波形パターンも矩形波に変換することで、基本波形パターンを矩形波カウント値に変換して数値化することができる。そのため、基本波形パターンを矩形波カウント値と検出波形パターンの矩形波カウント値とを比較することで、容易に判定結果が得られる。従って、判定結果は、基本波形パターンを矩形波カウント値と検出波形パターンの矩形波カウント値とが一致した場合には、作業者Mが正規の作業を行なっていると判定され、両カウント値が不一致の場合には、作業者Mが誤った作業を行なっている可能性が高いと判定することができる。
【0083】
ここで、管理コンピュータ20が実行する当該変形例の制御処理について説明する。図10は管理コンピュータが実行する変形例2の制御処理を説明するためのフローチャートである。図10中、S41〜S44は、前述したS21〜S24の処理と同じなので、説明を省略する。
【0084】
S45では、各タスクのセンサ信号の検出波形を抽出する。続いて、S46に進み、記憶装置80に記憶された各タスクの閾値を読み込む。次のS47では、センサ信号の波形を微小単位時間ΔT毎(例えば、0.1〜1秒毎)に区切って閾値±Hを越えるか否かをチェックする(図9Aを参照:第2の比較手段)。S47において、微小単位時間Δt毎に区切られたセンサ信号の波形が閾値±Hを越えた場合(YESの場合)、S48に進み、微小単位時間Δt毎の矩形波を生成する。
【0085】
また、S47において、微小単位時間ΔT毎に区切られたセンサ信号の波形が閾値±Hを越えない場合(NOの場合)、S49に進み、当該微小単位時間Δtのセンサ信号をノイズ成分と判定して除去する。
【0086】
次のS50では、S45で抽出されたセンサ信号の全てを微小単位時間Δt毎に区切って閾値±Hとの比較を完了したか否かをチェックする。S50において、抽出されたセンサ信号の全てを微小単位時間Δt毎に区切って閾値±Hとの比較を完了していないときは(NOの場合)、上記S47に戻り、S47以降の処理を繰り返す。また、S50において、抽出されたセンサ信号の全てを微小単位時間Δt毎に区切って閾値±Hとの比較を完了したときは(YESの場合)、S51に進む。
【0087】
S51では、微小単位時間Δt毎に区切られた矩形波数Nbをカウントし、カウント値を記憶装置80に記憶させてセンサ信号の波形を数値化する(図9Bを参照)。続いて、S52に進み、当該センサ信号に対応するタスクの基本波形パターンの矩形波数(カウント値)Naを記憶装置80から読み込む。
【0088】
次のS53では、計測された矩形波数Nbと予め設定された基本波形パターンの矩形波数Naとが一致するか否かをチェックする(第3の比較手段)。S53において、計測された矩形波数Nbと基本波形パターンの矩形波数Naとが不一致の場合(NOの場合)、S54に進み、作業内容に誤りがあるとの判定結果を記憶装置80に記憶させる(第2の判定手段)。これにより、表示画面150に警告を表示させることが可能になる(図4Aを参照)。
【0089】
また、S55では、当該センサユニット20に対して作業内容に誤りがあることを報知する警告信号を送信する。
【0090】
また、上記S53において、計測された矩形波数Nbと基本波形パターンの矩形波数Naとが一致した場合(YESの場合)、S56に進み、当該作業者Mの各タスクの矩形波の比較が完了したか否かをチェックする。S56において、当該作業者Mの各タスクの矩形波の比較が完了していないときは(NOの場合)、上記S45に戻り、S45以降の処理を再度繰り返す。
【0091】
また、上記S56において、当該作業者Mの各タスクの矩形波の比較が完了したときは(YESの場合)、S57〜S61(S60の処理は、第2の判定手段に相当する)の処理を実行する。尚、S57〜S61の処理は、前述したS32〜S36の処理と同様なため、説明を省略する。
【0092】
このように、本変形例では、センサ信号の波形パターンを矩形波に変換して矩形波数をカウントして数値化したデータ(矩形波数Na、Nb)に基づいて作業が適正に行なわれているかを判定することが可能になり、判定効率をより一層高めることが可能になる。
【0093】
〔変形例3〕
図11は変形例3の制御系を示すブロック図である。図11に示されるように、変形例3の作業管理システム300は、計測データ取得部310と、計測データ解析部320と、基本波形周波数解析データ記憶部330と、比較部(第4の比較手段)340と、判定部345(第3の判定手段)とを有する。計測データ取得部310は、各センサユニット20の加速度センサ22により検出されたセンサ信号(検出波形)を取得し、当該センサ信号を計測データ解析部320に出力する。
【0094】
計測データ解析部320は、センサ信号を高速フーリエ変換(Fast Fourier Transform)することにより、各作業毎の周波数特性を有するFFT波形を導出する。センサ信号を高速フーリエ変換して得られる周波数特性のFFT波形は、特定の周波数で複数のピーク値を持つスペクトラムとして表せる。
【0095】
基本波形周波数解析データ記憶部330は、各タスク毎の作業の基本波形となるセンサ信号を高速フーリエ変換した基本FFT波形を解析データとして記憶しており、計測データ解析部320で解析した各作業に対応する基本解析データ(FFT波形)を抽出して比較部340に入力する。また、基本波形周波数解析データ記憶部330に記憶される解析データとしては、各作業の種別毎に基本動作データとして予め計測された周波数関数f1m(f、x)〜fnm(f、x)を記憶するようにしても良い。尚、(f、x)は周波数fと波高値xの関数であることを示している。
【0096】
比較部340では、計測データ解析部320で高速フーリエ変換して得られる周波数特性の計測FFT波形と、基本波形周波数解析データ記憶部330から入力された基本解析データの基本FFT波形とを比較して周波数の第1ピーク値、第2ピーク値、第3ピーク値のそれぞれが一致するかを段階的に比較し、その比較結果を出力する。尚、本実施例においては、計測データ解析部320で得られた計測スペクトラムの周波数特性を基本スペクトラムと比較して周波数の第1ピーク値、第2ピーク値、第3ピーク値が全て一致した場合に当該作業の動作データが予め設定された基本動作と一致したものと判定する。従って、センサ信号を高速フーリエ変換して得られる周波数特性のFFT波形は、複数のピーク値を有しているが、比較結果を出力するまでの時間を短縮するため、第4ピーク値以下は比較しないこととする。
【0097】
ここで、センサ信号を高速フーリエ変換して解析する過程について説明する。
【0098】
図12AはFFT変換前の基本波形パターンを示す波形図である。図12BはFFT変換後の基本波形パターンの周波数特性を示す波形図である。
【0099】
図12Aに示す、センサ信号の基本波形350Aを高速フーリエ変換すると、図12Bに示す周波数特性を有する基本FFT波形350Bとなる。この高速フーリエ変換後の基本FFT波形350Bは、基本波形周波数解析データ記憶部330に予め格納されており、異なる周波数f1m、f2m、f3mがピーク値(波高値x)となる波形である。また、周波数f1m、f2m、f3mによるピーク値(波高値x)の合計値に対して、各周波数特性を示すピーク値の割合は第1ピークが最大(1番)で、第2ピークが2番、第3ピークが3番となるが、第3ピーク以降のピーク値が大幅に減少する。
【0100】
図13AはFFT変換前の検出波形パターンを示す波形図である。図13BはFFT変換後の検出波形パターンの周波数特性を示す波形図である。
【0101】
図13Aに示す、センサ信号の計測波形360Aを高速フーリエ変換すると、図13Bに示す周波数特性を有する計測FFT波形360Bとなる。この高速フーリエ変換後の計測FFT波形360Bは、計測データ解析部320で高速フーリエ変換されて得られた計測データであり、周波数f1d、f2d、f3dがピーク値(波高値x)となる波形である。
【0102】
そして、比較部340では、基本FFT波形350Bと計測FFT波形360Bとが一致するか比較する。比較部340では、周波数f1m=f1d、f2m=f2d、f3m=f3dの場合に同一であるとの比較結果を判定部345に出力する。判定部345では、周波数f1d、f2d、f3dのうち何れか一つでも不一致の場合には、作業者Mの作業動作がデータベースに格納された基本動作と一致しないことになり、その判定結果を出力する。
【0103】
図14AはFFT変換前の別の基本波形パターンを示す波形図である。図14BはFFT変換後の別の基本波形パターンの周波数特性を示す波形図である。
【0104】
図14Aに示す、センサ信号の基本波形370Aを高速フーリエ変換すると、図12Bに示す周波数特性を有する基本FFT波形370Bとなる。この高速フーリエ変換後の基本FFT波形370Bは、基本波形周波数解析データ記憶部330に予め格納されており、異なる周波数f4m、f5m、f6mがピーク値(波高値x)となる波形である。また、周波数f4m、f5m、f6mによるピーク値(波高値x)の合計値に対して、各周波数特性を示すピーク値の割合は第1ピークが最大(1番)で、第2ピークが2番、第3ピークが3番となるが、第3ピーク以降のピーク値が大幅に減少する。
【0105】
図15AはFFT変換前の別の検出波形パターンを示す波形図である。図15BはFFT変換後の別の検出波形パターンの周波数特性を示す波形図である。
【0106】
図15Aに示す、センサ信号の計測波形380Aを高速フーリエ変換すると、図15Bに示す周波数特性を有する計測FFT波形380Bとなる。この高速フーリエ変換後の計測FFT波形380Bは、計測データ解析部320で高速フーリエ変換されて得られた計測データであり、周波数f4d、f5d、f6dでピーク値(波高値x)となる波形である。
【0107】
そして、比較部340では、基本FFT波形370Bと計測FFT波形380Bとが一致するか比較する。比較部340では、周波数f4m=f4d、f5m=f5d、f6m=f6dの場合に同一であるとの比較結果を判定部345に出力する。周波数f4d、f5d、f6dのうち何れか一つでも不一致の場合には、作業者Mの作業動作がデータベースに格納された基本動作と一致しないことになる。
【0108】
図16は管理コンピュータが実行する変形例3の制御処理を説明するためのフローチャートである。図16中、S71〜S74は、前述したS21〜S24の処理と同じなので、説明を省略する。
【0109】
S75では、各タスクのセンサ信号の検出波形を抽出する。続いて、S76に進み、抽出されたセンサ信号の検出波形を高速フーリエ変換(変換手段)して計測FFT波形360B(または380B)を記憶する(記憶手段)。次のS77では、記憶装置80に格納されたデータベースから基本波形の基本FFT波形350B(または370B)を読み込む。
【0110】
続いて、S78において、計測FFT波形360B(または380B)と基本FFT波形350B(または370B)とを比較する(第4の比較手段)。本実施例では、前述したように周波数f1m=f1d、f2m=f2d、f3m=f3dの場合、(または周波数f4m=f4d、f5m=f5d、f6m=f6dの場合)に同一であると判定する(図12A〜図15Bを参照)。
【0111】
また、各ピーク値となる周波数を段階的に比較し、最終的に第1〜第3のピークの周波数が全て一致した場合に同一であると判定しても良い。例えば、計測FFT波形360B(または380B)と基本FFT波形350B(または、370B)とを比較する場合、例えば、第1ピークである周波数f1mと周波数f1d(または周波数f4mと周波数f4d)とを比較して一致した場合に、第2ピークである周波数f2mと周波数f2d(または周波数f5mと周波数f5d)とを比較する。そして、第2ピークの周波数f2mと周波数f2d(または周波数f5mと周波数f5d)とが一致した場合に、第3ピークである周波数f3mと周波数f3d(または周波数f6mと周波数f6d)とを比較する。第3ピークの周波数f3mと周波数f3d(または周波数f6mと周波数f6d)とが一致した場合には、第1ピークから第3ピークの周波数が全て一致するため、計測FFT波形360B(または380B)と基本FFT波形350B(または370B)とが一致すると判定することができる。
【0112】
また、計測FFT波形と基本FFT波形とを比較する場合、各ピークの波高値xが一致する必要はなく、ピーク値となる各周波数が一致することで、検出波形と基本波形とが一致するものと判定することが可能になる。
【0113】
また、S79において、第1ピークから第3ピークの周波数のうち何れか一つが一致しない場合(NOの場合)、S80に進み、作業内容に誤りがあるとの判定結果を記憶装置80に記憶させる(第4の判定手段)。これにより、表示画面150に警告を表示させることが可能になる(図4Aを参照)。
【0114】
また、S81では、当該センサユニット20に対して作業内容に誤りがあることを報知する警告信号を送信する。これにより、当該センサユニット20の報知手段24では、小型スピーカから警告音を発したり、あるいは発光ダイオードの点灯または点滅による警告を行なって作業者Mに報知する。そのため、作業者Mは、現在の作業に誤りがあるか否かを自ら検証して作業を正規の作業に修正することができる。
【0115】
また、上記S79において、第1ピークから第3ピークの周波数の全てが一致した場合(YESの場合)は、上記S80、S81の処理を省略してS82に進む。
【0116】
S82において、各タスクの周波数特性の比較処理が完了したか否かをチェックしており、まだ比較していないタスクの周波数特性が残っている場合(NOの場合)、S75に戻り、S75以降の処理を繰り返す。また、S82において、各タスクの周波数特性の比較処理が完了したときは(YESの場合)、S83以降の処理を実行する。尚、S83〜S87(S86の処理は第4の判定手段に相当する)の処理は、前述したS32〜S36の処理と同様なため、説明を省略する。
【0117】
このように、加速度センサ22により検出されたセンサ信号を高速フーリエ変換して得られた周波数特性(第1〜第3ピークの周波数)が一致する場合に作業者Mの作業が正規の作業と同じであると判定し、周波数特性(第1〜第3ピークの周波数)が不一致の場合に作業者Mの作業が誤りであると判定することが可能になるため、作業者Mの作業動作の判定精度をより高めることが可能になる。
(変形例4)
図17は変形例4の制御系を示すブロック図である。図17に示されるように、変形例4の作業管理システム400は、計測データ取得部410と、フィルタ420と、計測データ解析部430と、基本波形周波数解析データ記憶部440と、比較部450(第5の比較手段)と、判定部455(第4の判定手段)とを有する。計測データ取得部410は、各センサユニット20の加速度センサ22により検出されたセンサ信号(検出波形)を取得し、フィルタ420に当該センサ信号を出力する。
【0118】
フィルタ420は、高周波帯域のノイズ成分を含んだセンサ信号を高速フーリエ変換(Fast Fourier Transform)することにより、ノイズ成分の周波数特性を含むFFT波形を導出する。センサ信号を高速フーリエ変換して得られる周波数特性のFFT波形は、ノイズ成分となる特定の周波数でピーク値を持つスペクトラムとして表せる。
【0119】
計測データ解析部430は、フィルタ420においてノイズ成分の周波数帯域を除くセンサ信号をFFT変換後の検出信号として入力される。従って、計測データ解析部430は、フィルタ420のFFT変換処理によりノイズ成分を除去された作業者Mの作業を計測したセンサ信号を解析処理する。尚、計測データ解析部430の解析処理は、前述した変形例3の計測データ解析部320と同様なので、説明を省略する。
【0120】
図18AはFFT変換前の検出波形パターンを示す波形図である。図18Aに示されるように、各作業の動作を検出したセンサ信号の検出波形パターン460と470との間には、ノイズ成分480、490が検出されることがある。
【0121】
ノイズ成分480、490は、検出波形パターン460、470と異なる周波数帯域で発生するため、高速フーリエ変換を行なうと、ノイズ成分480、490の周波数特性を含んだスペクトラムで表すことができる。
【0122】
図18BはFFT変換後のノイズ成分480の周波数特性を示す波形図である。図18Bに示されるように、例えば、ノイズ成分480の場合、高速フーリエ変換を行なうと、周波数f7〜f8の周波数帯域でピークとなる周波数特性をもつ波形が導出される。
【0123】
図18CはFFT変換後のノイズ成分の周波数特性を示す波形図である。図18Cに示されるように、例えば、ノイズ成分490の場合、高速フーリエ変換を行なうと、周波数f9〜f10の周波数帯域でピークとなる周波数特性をもつ波形が導出される。
【0124】
そのため、フィルタ420では、図19に示すように、計測データ取得部410で取得されたセンサ信号から周波数f7〜f8の周波数帯域及び周波数f9〜f10の周波数帯域を除く周波数の信号成分を検出波形として計測データ解析部430に出力する。
【0125】
そのため、比較部450においては、ノイズ成分480、490が除去されたセンサ信号と、基本波形周波数解析データ記憶部440から読み出された基本波形とを比較して、比較結果を判定部455に出力する。このように、比較部450では、ノイズ成分480、490の影響を受けないで比較することができるので、ノイズ成分480、490による誤検出がなくなり、その後の判定部455の判定処理による作業の判定結果の精度をより一層高めることが可能になる。
【産業上の利用可能性】
【0126】
上記実施例では、作業者Mの手足に装着されたセンサユニット20によって作業者Mの作業動作を検出する場合について説明したが、これに限らず、例えば、作業者Mの作業服に各センサユニットを縫いつける構成としても良い。
【0127】
また、各作業者Mに装着されたセンサユニットの数を4個以上に増やして各関節の動きを個別に検出し、各関節の動きから作業者Mの作業が適正か否かを判定することも可能である。
【0128】
また、上記実施例では、作業者Mの作業を管理する作業管理システムとして説明したが、これに限らず、工場以外の場所、施設(例えば、病院、介護施設、物流倉庫等で働く者、あるいは鉄道、トラックやバスなどの車両の運転者、牧場や農場で働く者)を管理する場合にも本発明を適用することができるのは勿論である。
【符号の説明】
【0129】
10 作業管理システム
20(20A〜20D) センサユニット
21 制御部
22 加速度センサ
23 無線通信部
24 報知手段
25 メモリ
27 リストバンド
30 無線通信システム
40 管理コンピュータ
42 データ取得部
44 データ分類部
46 動作判定部
48 出力部
501〜50n 無線通信装置
60 通信回線
70 ルータ
80 記憶装置
90 通信モデム
100 ホストコンピュータ
120 モニタ
130 センサユニット読み取り装置
131〜134 データ読み取り部
150 表示画面
152 タイムスケジュール
154 ロット番号表示欄
160 タスク作業設定画面
162 タスク番号一覧
164 作業手順欄
166 作業リスト
170 タスクデータベース
180 波形
190 矩形波
200A〜200C、210A〜210C、220A〜220C 基本波形パターン
300、400 作業管理システム
310、410 計測データ取得部
320、430 計測データ解析部
330、440 基本波形周波数解析データ記憶部
340、450 比較部
345、455 判定部
350A、370A 基本波形
350B、370B 基本FFT波形
360A、380A 計測波形
360B、380B 計測FFT波形
420 フィルタ
460、470 検出波形パターン
480、490 ノイズ成分
【特許請求の範囲】
【請求項1】
管理対象者の動作を検出するセンサユニットと、
前記センサユニットにより検出された当該管理対象者のセンサ信号を取得するデータ取得手段と、
前記データ取得手段により取得されたセンサ信号を各動作毎に分類するデータ分類手段と、
前記データ分類手段により分類されたセンサ信号に基づいて動作を判定する動作判定手段と、
前記動作判定手段の判定結果を出力する出力手段と、
を備えたことを特徴とする作業管理システム。
【請求項2】
管理対象者の動作を検出するセンサユニットと、
前記センサユニットにより検出された当該管理対象者の動作データを取得するデータ取得手段と、
前記データ取得手段により取得された動作データを各動作毎の波形パターンに分類するデータ分類手段と、
前記データ分類手段により分類された波形パターンに基づいて動作を判定する動作判定手段と、
前記動作判定手段の判定結果を出力する出力手段と、
を備えたことを特徴とする作業管理システム。
【請求項3】
前記センサユニットは、
前記管理対象者の動きに応じた加速度を検出する加速度センサと、
前記加速度センサにより検出された動作データを記憶する記憶手段と、
前記記憶手段に記憶された動作データを送信する送信手段と、
を有することを特徴とする請求項1または2に記載の作業管理システム。
【請求項4】
前記記憶手段は、前記加速度センサにより検出された加速度の信号波形を記憶することを特徴とする請求項3に記載の作業管理システム。
【請求項5】
前記データ取得手段は、前記センサユニットにより検出されたセンサ信号を無線信号として取得することを特徴とする請求項1又は2に記載の作業管理システム。
【請求項6】
前記データ分類手段は、前記センサユニットにより検出されたセンサ信号の波形を各動作に応じたタスク毎のパターンに分類することを特徴とする請求項1又は2に記載の作業管理システム。
【請求項7】
前記動作判定手段は、
予め設定された各動作に応じたタスク毎の基本波形パターンと前記データ分類手段により分類された前記信号波形の検出波形パターンとを比較する第1の比較手段と、
前記第1の比較手段により両波形パターンが一致した場合に当該検出波形パターンが正規の動作であると判定し、前記両波形パターンが一致しない場合には当該検出波形パターンが正規の動作ではないと判定する第1の判定手段と、
を有することを特徴とする請求項2に記載の作業管理システム。
【請求項8】
前記第1の比較手段は、前記基本波形パターンと前記検出波形パターンとの差分を求め、当該差分が所定範囲内である場合に両波形パターンが一致しているとし、当該差分が所定範囲外である場合に両波形パターンが不一致とすることを特徴とする請求項7に記載の作業管理システム。
【請求項9】
前記動作判定手段は、
前記データ分類手段により分類された前記信号波形の出力レベルと予め設定された閾値とを比較する第2の比較手段と、
前記第2の比較手段により前記信号波形の出力レベルが閾値を越える場合に所定時間間隔毎の矩形波を生成する矩形波生成手段と、
前記矩形波生成手段により生成された矩形波をカウントするカウント手段と、
前記カウント手段によりカウントされたカウント値と予め設定された各動作に応じたタスク毎のカウント値とを比較する第3の比較手段と、
前記第3の比較手段により両カウント値が一致した場合に当該検出波形パターンが正規の動作であると判定し、前記両カウント値が一致しない場合には当該検出波形パターンが正規の動作ではないと判定する第2の判定手段と、
を有することを特徴とする請求項1に記載の作業管理システム。
【請求項10】
前記動作判定手段は、
各作業の基本動作を前記加速度センサにより検出し、前記加速度センサからのセンサ信号を高速フーリエ変換する変換手段と、
前記変換手段による変換結果を記憶する記憶手段と、
前記変換手段により変換された波形の周波数特性と前記記憶手段に記憶された波形の周波数特性とを比較する第4の比較手段と、
前記第4の比較手段により両周波数特性が一致した場合に前記加速度センサからのセンサ信号が正規の動作であると判定し、前記両周波数特性が一致しない場合には当該検出波形パターンが正規の動作ではないと判定する第3の判定手段と、
を有することを特徴とする請求項1に記載の作業管理システム。
【請求項11】
前記動作判定手段は、
各作業の基本動作を前記加速度センサにより検出し、前記加速度センサからのセンサ信号を高速フーリエ変換する変換手段と、
前記変換手段による変換結果を記憶する記憶手段と、
前記変換手段により変換された波形から基本動作以外の波形を除去するフィルタ手段と、
前記フィルタ手段により除去された波形を除くセンサ信号の周波数特性と前記記憶手段に記憶された波形の周波数特性とを比較する第5の比較手段と、
前記第5の比較手段により両周波数特性が一致した場合に前記加速度センサからのセンサ信号が正規の動作であると判定し、前記両周波数特性が一致しない場合には当該検出波形パターンが正規の動作ではないと判定する第4の判定手段と、
を有することを特徴とする請求項1に記載の作業管理システム。
【請求項12】
前記出力手段は、前記動作判定手段の判定結果を前記記憶手段に記憶させると共に、モニタに表示させることを特徴とする請求項1又2に記載の作業管理システム。
【請求項13】
前記出力手段は、前記動作判定手段の判定結果を通信回線を介して上位コンピュータに送信することを特徴とする請求項1、2、12の何れかに記載の作業管理システム。
【請求項14】
管理対象者の動作をセンサユニットにより検出する過程と、
前記センサユニットにより検出されたセンサ信号を取得する過程と、
前記取得されたセンサ信号を各動作毎の波形パターンに分類する過程と、
前記分類されたセンサ信号に基づいて動作を判定する過程と、
前記動作判定の判定結果を出力する過程と、
を含むことを特徴とする作業管理方法。
【請求項15】
管理対象者の動作をセンサユニットにより検出する過程と、
前記センサユニットにより検出された動作データを取得する過程と、
前記取得された動作データを各動作毎の波形パターンに分類する過程と、
前記分類された波形パターンに基づいて動作を判定する過程と、
前記動作判定の判定結果を出力する過程と、
を含むことを特徴とする作業管理方法。
【請求項1】
管理対象者の動作を検出するセンサユニットと、
前記センサユニットにより検出された当該管理対象者のセンサ信号を取得するデータ取得手段と、
前記データ取得手段により取得されたセンサ信号を各動作毎に分類するデータ分類手段と、
前記データ分類手段により分類されたセンサ信号に基づいて動作を判定する動作判定手段と、
前記動作判定手段の判定結果を出力する出力手段と、
を備えたことを特徴とする作業管理システム。
【請求項2】
管理対象者の動作を検出するセンサユニットと、
前記センサユニットにより検出された当該管理対象者の動作データを取得するデータ取得手段と、
前記データ取得手段により取得された動作データを各動作毎の波形パターンに分類するデータ分類手段と、
前記データ分類手段により分類された波形パターンに基づいて動作を判定する動作判定手段と、
前記動作判定手段の判定結果を出力する出力手段と、
を備えたことを特徴とする作業管理システム。
【請求項3】
前記センサユニットは、
前記管理対象者の動きに応じた加速度を検出する加速度センサと、
前記加速度センサにより検出された動作データを記憶する記憶手段と、
前記記憶手段に記憶された動作データを送信する送信手段と、
を有することを特徴とする請求項1または2に記載の作業管理システム。
【請求項4】
前記記憶手段は、前記加速度センサにより検出された加速度の信号波形を記憶することを特徴とする請求項3に記載の作業管理システム。
【請求項5】
前記データ取得手段は、前記センサユニットにより検出されたセンサ信号を無線信号として取得することを特徴とする請求項1又は2に記載の作業管理システム。
【請求項6】
前記データ分類手段は、前記センサユニットにより検出されたセンサ信号の波形を各動作に応じたタスク毎のパターンに分類することを特徴とする請求項1又は2に記載の作業管理システム。
【請求項7】
前記動作判定手段は、
予め設定された各動作に応じたタスク毎の基本波形パターンと前記データ分類手段により分類された前記信号波形の検出波形パターンとを比較する第1の比較手段と、
前記第1の比較手段により両波形パターンが一致した場合に当該検出波形パターンが正規の動作であると判定し、前記両波形パターンが一致しない場合には当該検出波形パターンが正規の動作ではないと判定する第1の判定手段と、
を有することを特徴とする請求項2に記載の作業管理システム。
【請求項8】
前記第1の比較手段は、前記基本波形パターンと前記検出波形パターンとの差分を求め、当該差分が所定範囲内である場合に両波形パターンが一致しているとし、当該差分が所定範囲外である場合に両波形パターンが不一致とすることを特徴とする請求項7に記載の作業管理システム。
【請求項9】
前記動作判定手段は、
前記データ分類手段により分類された前記信号波形の出力レベルと予め設定された閾値とを比較する第2の比較手段と、
前記第2の比較手段により前記信号波形の出力レベルが閾値を越える場合に所定時間間隔毎の矩形波を生成する矩形波生成手段と、
前記矩形波生成手段により生成された矩形波をカウントするカウント手段と、
前記カウント手段によりカウントされたカウント値と予め設定された各動作に応じたタスク毎のカウント値とを比較する第3の比較手段と、
前記第3の比較手段により両カウント値が一致した場合に当該検出波形パターンが正規の動作であると判定し、前記両カウント値が一致しない場合には当該検出波形パターンが正規の動作ではないと判定する第2の判定手段と、
を有することを特徴とする請求項1に記載の作業管理システム。
【請求項10】
前記動作判定手段は、
各作業の基本動作を前記加速度センサにより検出し、前記加速度センサからのセンサ信号を高速フーリエ変換する変換手段と、
前記変換手段による変換結果を記憶する記憶手段と、
前記変換手段により変換された波形の周波数特性と前記記憶手段に記憶された波形の周波数特性とを比較する第4の比較手段と、
前記第4の比較手段により両周波数特性が一致した場合に前記加速度センサからのセンサ信号が正規の動作であると判定し、前記両周波数特性が一致しない場合には当該検出波形パターンが正規の動作ではないと判定する第3の判定手段と、
を有することを特徴とする請求項1に記載の作業管理システム。
【請求項11】
前記動作判定手段は、
各作業の基本動作を前記加速度センサにより検出し、前記加速度センサからのセンサ信号を高速フーリエ変換する変換手段と、
前記変換手段による変換結果を記憶する記憶手段と、
前記変換手段により変換された波形から基本動作以外の波形を除去するフィルタ手段と、
前記フィルタ手段により除去された波形を除くセンサ信号の周波数特性と前記記憶手段に記憶された波形の周波数特性とを比較する第5の比較手段と、
前記第5の比較手段により両周波数特性が一致した場合に前記加速度センサからのセンサ信号が正規の動作であると判定し、前記両周波数特性が一致しない場合には当該検出波形パターンが正規の動作ではないと判定する第4の判定手段と、
を有することを特徴とする請求項1に記載の作業管理システム。
【請求項12】
前記出力手段は、前記動作判定手段の判定結果を前記記憶手段に記憶させると共に、モニタに表示させることを特徴とする請求項1又2に記載の作業管理システム。
【請求項13】
前記出力手段は、前記動作判定手段の判定結果を通信回線を介して上位コンピュータに送信することを特徴とする請求項1、2、12の何れかに記載の作業管理システム。
【請求項14】
管理対象者の動作をセンサユニットにより検出する過程と、
前記センサユニットにより検出されたセンサ信号を取得する過程と、
前記取得されたセンサ信号を各動作毎の波形パターンに分類する過程と、
前記分類されたセンサ信号に基づいて動作を判定する過程と、
前記動作判定の判定結果を出力する過程と、
を含むことを特徴とする作業管理方法。
【請求項15】
管理対象者の動作をセンサユニットにより検出する過程と、
前記センサユニットにより検出された動作データを取得する過程と、
前記取得された動作データを各動作毎の波形パターンに分類する過程と、
前記分類された波形パターンに基づいて動作を判定する過程と、
前記動作判定の判定結果を出力する過程と、
を含むことを特徴とする作業管理方法。
【図1】


【図2】
【図3A】
【図3B】
【図3C】
【図3D】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8】
【図9A】
【図9B】
【図10】
【図11】
【図12A】
【図12B】
【図13A】
【図13B】
【図14A】
【図14B】
【図15A】
【図15B】
【図16】
【図17】
【図18A】
【図18B】
【図18C】
【図19】
【図2】
【図3A】
【図3B】
【図3C】
【図3D】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8】
【図9A】
【図9B】
【図10】
【図11】
【図12A】
【図12B】
【図13A】
【図13B】
【図14A】
【図14B】
【図15A】
【図15B】
【図16】
【図17】
【図18A】
【図18B】
【図18C】
【図19】
【公開番号】特開2012−185695(P2012−185695A)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願番号】特願2011−48597(P2011−48597)
【出願日】平成23年3月7日(2011.3.7)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(504171134)国立大学法人 筑波大学 (510)
【Fターム(参考)】
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願日】平成23年3月7日(2011.3.7)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(504171134)国立大学法人 筑波大学 (510)
【Fターム(参考)】
[ Back to top ]