
作業車の作業動力取り出し構造
【課題】燃料消費を招くことなく定置作業を行えるようにする。
【解決手段】運転座席15に対する着座及び退座を検出する着座センサ35と、着座センサ35の退座検出に伴って車体の走行及び動力取り出し用のPTO軸4の駆動を阻止する制御手段100とを備えた作業車の作業動力取り出し構造において、PTO軸4を駆動する電動モータ21と、この電動モータ21に電力を供給するバッテリ22,23と、車体の走行不能状態を検出する検出手段32,36とを備え、制御手段100が、検出手段32,36の検出に基づいて車体の走行不能状態を検知した場合に、電動モータ21によるPTO軸4の駆動を許容するように構成してある。
【解決手段】運転座席15に対する着座及び退座を検出する着座センサ35と、着座センサ35の退座検出に伴って車体の走行及び動力取り出し用のPTO軸4の駆動を阻止する制御手段100とを備えた作業車の作業動力取り出し構造において、PTO軸4を駆動する電動モータ21と、この電動モータ21に電力を供給するバッテリ22,23と、車体の走行不能状態を検出する検出手段32,36とを備え、制御手段100が、検出手段32,36の検出に基づいて車体の走行不能状態を検知した場合に、電動モータ21によるPTO軸4の駆動を許容するように構成してある。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転座席に対する着座及び退座を検出する着座センサと、前記着座センサの退座検出に伴って車体の走行及び動力取り出し用のPTO軸の駆動を阻止する制御手段とを備えた作業車の作業動力取り出し構造に関する。
【背景技術】
【0002】
作業車の一例であるトラクタでは、制御手段が、着座センサの検出に基づいて運転座席からの退座を検知した場合に、エンジンを自動停止させることで車体の走行及び動力取り出し用のPTO軸の駆動を阻止し、かつ、非使用検出センサの検出に基づいて運転座席の非使用位置への操作を検知した場合に、エンジンの自動停止を行わないように構成したものがある(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−68705号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の構成では、車体を停止した状態でPTO軸からの動力を利用して、灌漑用のポンプや薪割り装置などを駆動することによる灌漑作業や薪割り作業などの定置作業を行う場合には、エンジンを作動させる必要があることから燃料消費などの面において改善の余地がある。
【0005】
本発明の目的は、燃料消費を招くことなく定置作業を行えるようにすることにある。
【課題を解決するための手段】
【0006】
第1の発明は、運転座席に対する着座及び退座を検出する着座センサと、前記着座センサの退座検出に伴って車体の走行及び動力取り出し用のPTO軸の駆動を阻止する制御手段とを備えた作業車の作業動力取り出し構造において、
前記PTO軸を駆動する電動モータと、この電動モータに電力を供給するバッテリと、車体の走行不能状態を検出する検出手段とを備え、
前記制御手段が、前記検出手段の検出に基づいて車体の走行不能状態を検知した場合に、前記電動モータによる前記PTO軸の駆動を許容するように構成してある。
【0007】
第1の発明によると、エンジンを作動させることなく、バッテリからの電力で駆動したPTO軸からの動力で定置作業を行うことができる。そして、電動モータによるPTO軸の駆動は、検出手段が車体の走行不能状態を検出している状態において可能になることから、定置作業時に車体が不測に走行する虞を未然に回避することができる。
【0008】
従って、燃料消費を招くことなく定置作業を行うことができる上に、定置作業時における車体の走行を阻止することができる。
【0009】
第2の発明は、上記第1の発明において、
前記バッテリへの外部電源からの充電を可能に構成し、
前記制御手段が、前記外部電源から前記バッテリへの充電中に前記検出手段の検出に基づいて車体の走行不能状態を検知した場合に、前記電動モータによる前記PTO軸の駆動を許容するように構成してある。
【0010】
第2の発明によると、外部電源からバッテリへの充電中においても定置作業を行うことができ、作業効率の向上を図ることができる。又、充電中における車体の走行を阻止することができる。
【図面の簡単な説明】
【0011】
【図1】電動トラクタの全体右側面図である。
【図2】電動トラクタの制御構成を示す概略平面図である。
【図3】電動トラクタの制御構成を示すブロック図である。
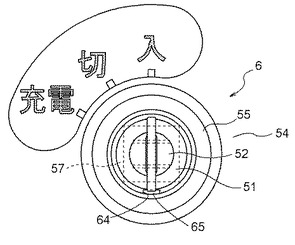
【図4】メインスイッチの正面図である。
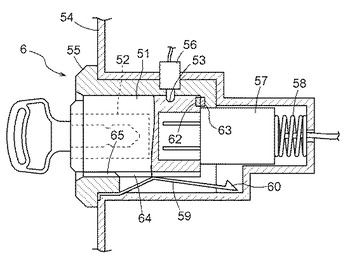
【図5】メインスイッチの着脱構造を示す要部の縦断側面図である。
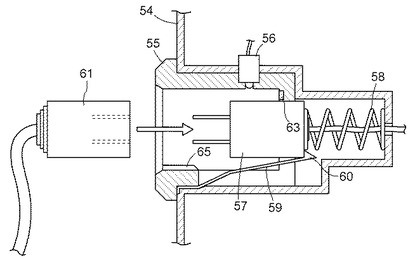
【図6】メインスイッチを取り外した充電可能状態を示す要部の縦断側面図である。
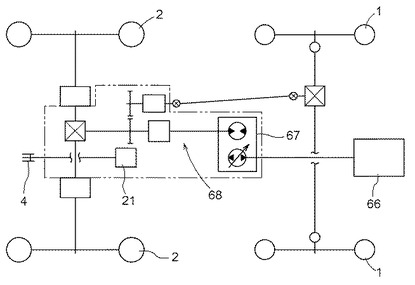
【図7】別実施形態でのトラクタの伝動構成を示す概略平面図である。
【発明を実施するための形態】
【0012】
以下、本発明を実施するための形態の一例として、本発明に係る作業車の作業動力取り出し構造を、作業車の一例である電動トラクタに適用した実施形態を図面に基づいて説明する。
【0013】
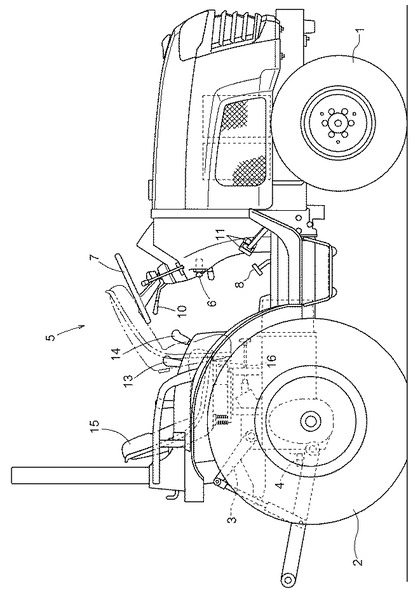
図1及び図2示すように、この実施形態で例示する電動トラクタは、操向輪としての左右の前輪1と駆動輪としての左右の後輪2とを備えた車体の後部に、油圧式のリフトシリンダ(図示せず)の作動で昇降揺動する左右一対のリフトアーム3や、作業用の動力の外部への取り出しを可能にするPTO軸4などを装備してある。これにより、この電動トラクタは、その後部にロータリ耕耘装置やプラウなどの作業装置(図示せず)を昇降駆動可能に連結することができ、かつ、ロータリ耕耘装置などの駆動型の作業装置に供給する動力の取り出しが可能となるように構成してある。
【0014】
車体の後半部には搭乗運転部5を形成してある。搭乗運転部5には、キー操作式のメインスイッチ6、前輪操舵用のステアリングホイール7、踏み込み解除位置に自動復帰するアクセルペダル8、位置保持型の車速設定レバー9、位置保持型の前後進切換レバー10、踏み込み解除位置に自動復帰する左右一対のブレーキペダル11、位置保持型の駐車ブレーキレバー12、位置保持型の昇降レバー13、及び、位置保持型のPTOレバー14、などの各種の操作具、並びに運転座席15、などを備えてある。運転座席15は、その前部に備えた左右向きの支軸16を支点にした揺動操作で、着座が可能な使用位置と着座を阻止した非使用位置とに位置変更可能に構成してある。
【0015】
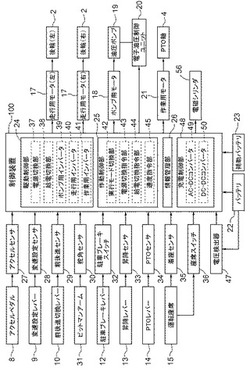
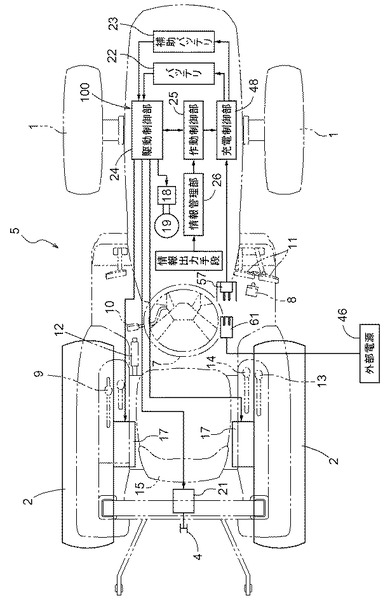
図2及び図3示すように、左右の後輪2は左右の走行用モータ17で駆動する。リフトシリンダなどの各種の油圧アクチュエータは、ポンプ用モータ18で駆動した油圧ポンプ19からのオイルの流量などを電磁制御弁(図示せず)などの各種の油圧機器を備えた電子油圧制御ユニット20を介して制御することで適正に駆動する。PTO軸4は作業用モータ21で駆動する。左右の走行用モータ17にはインホイール型の交流モータを採用してある。ポンプ用モータ18及び作業用モータ21には交流モータを採用してある。
【0016】
この電動トラクタには、マイクロコンピュータなどを搭載した複数の電子制御ユニットなどで構成した制御装置(制御手段)100を搭載してある。制御装置100は、メインスイッチ6の「入」位置又は「充電」位置への操作で得られる充放電式のバッテリ22又は補助バッテリ23からの電力で起動する。又、メインスイッチ91の「切」位置への操作でバッテリ22又は補助バッテリ23からの電力が断たれると、その内部に備えた自己保持回路(図示せず)によって所定時間の間は給電状態を維持し、メインスイッチ91が「切」位置に操作された段階での各種の情報をEEPROMに記憶した後、所定時間の経過とともに自己保持回路による給電を停止して作動を停止する。
【0017】
各モータ17,18,21には、制御装置100の駆動制御部24を介してバッテリ22又は補助バッテリ23からの電力を供給する。駆動制御部24は、電子油圧制御ユニット20などの作動を制御する制御装置100の作動制御部25からの制御指令に基づいて、各モータ17,18,21に供給する電力量などを制御して各モータ17,18,21を適正に駆動する。作動制御部25は、各種のスイッチ及びセンサなどの情報出力手段からの出力情報を管理する制御装置100の情報管理部26からの情報に基づいて、その情報に適した制御指令を電子油圧制御ユニット20及び駆動制御部24などに出力する。
【0018】
駆動制御部24、作動制御部25、及び情報管理部26などは、車載LANや車載電力線などを介して相互通信可能かつ電力供給可能に接続してある。
【0019】
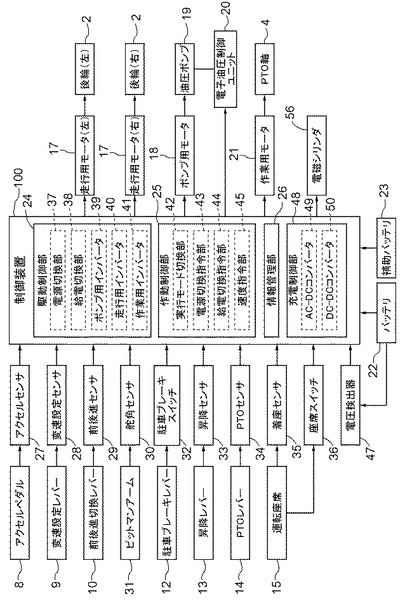
情報管理部26が管理する情報には、メインスイッチ6の操作位置、アクセルセンサ27が検出するアクセルペダル8の踏み込み操作量、車速設定センサ28が検出する車速設定レバー9の操作位置、前後進センサ29が検出する前後進切換レバー10の操作位置、舵角センサ30が旋回内側の前輪1の操舵角として検出するピットマンアーム31の直進位置からの操作角、駐車ブレーキスイッチ(検出手段の一例)32が検出する駐車ブレーキレバー12の操作位置、昇降センサ33が検出する昇降レバー13の操作位置、PTOセンサ34が検出するPTOレバー14の操作位置、着座センサ35が検出する運転座席15に対する着座の有無、及び、座席スイッチ(検出手段の一例)36が検出する運転座席15の操作位置、などである。
【0020】
上記の構成から、制御装置100は、アクセルペダル8の踏み込み操作量及び車速設定レバー9の操作位置などに基づいて左右の走行用モータ17の回転速度を制御する速度制御、前後進切換レバー10の操作位置などに基づいて左右の走行用モータ17の回転方向を切り換える前後進切り換え制御、前輪1の操舵角などに基づいて左右の後輪2を差動させる差動制御、昇降レバー13の操作位置などに基づいてリフトアームを昇降揺動させる昇降制御、及び、PTOレバー14の操作位置などに基づいて作業用モータ21を作動状態と停止状態とに切り換えるPTO駆動制御、などを行うことができる。
【0021】
駆動制御部24は、電源切換部37、給電切換部38、ポンプ用インバータ39、走行用インバータ40、及び作業用インバータ41を備えている。電源切換部37は、作動制御部25からの電源切り換え指令に基づいて、電源をバッテリ22とする状態と補助バッテリ23とする状態とそれらの双方とする状態とに切り換える。給電切換部38は、作動制御部25からの給電切り換え指令に基づいて、電力をポンプ用インバータ39に供給する状態と、ポンプ用インバータ39及び走行用インバータ40に供給する状態と、ポンプ用インバータ39及び作業用インバータ41に供給する状態と、各インバータ39〜41に供給する状態とに切り換える。ポンプ用インバータ39は、ポンプ用モータ18に電力を供給して油圧ポンプ19を適正に駆動する。走行用インバータ40は、作動制御部25からの速度指令に基づいて、左右の走行用モータ17に供給する駆動制御電流(例えばPWM信号)を制御して左右の走行用モータ17の回転速度を適正に変更する。作業用インバータ41は、作業用モータ21に電力を供給してPTO軸4を適正に駆動する。
【0022】
作動制御部25は、実行モード切換部42、電源切換指令部43、給電切換指令部44、及び速度指令部45を備えている。実行モード切換部42は、情報管理部26がメインスイッチ6の「入」位置への操作を検知している状態で、着座センサ35の検出に基づいて運転座席15への着座を検知すると、それらの検知に基づいて、バッテリ22及び補助バッテリ23から各モータ17,18,21などへの給電を可能にして、車体の走行やPTO軸4の駆動などを可能にする給電モードを実行する。又、情報管理部26がメインスイッチ6の「切」位置への操作、又は、着座センサ35の検出に基づいて運転座席15からの退座を検知すると、その検知に基づいて、バッテリ22及び補助バッテリ23から各モータ17,18,21などへの給電を停止して、車体の走行やPTO軸4の駆動などを阻止する待機モードを実行する。一方、情報管理部26がメインスイッチ6の「充電」位置への操作を検知していると、その検知に基づいて、外部電源46からバッテリ22及び補助バッテリ23への充電を可能にする充電モードを実行する。そして、情報管理部26がメインスイッチ6の「充電」位置への操作を検知している状態で、駐車ブレーキスイッチ32又は座席スイッチ36の検出に基づいて駐車ブレーキレバー12の制動解除位置からの離脱操作又は運転座席15の非使用位置への操作を検知すると、それらの検知に基づいて、バッテリ22及び補助バッテリ23への充電を可能にしながら、バッテリ22及び補助バッテリ23からポンプ用モータ18及び作業用モータ21への給電を可能にして、左右のリフトアーム3やPTO軸4の駆動などを可能にする充電定置作業モードを実行する。
【0023】
電源切換指令部43は、給電モードにおいて、情報管理部26がバッテリ用の電圧検出器47の検出に基づいてバッテリ22の電圧が設定値を超えていることを検知していると、その検知に基づいて駆動制御部24の電源切換部37に電源としてバッテリ22の使用を指令する。又、情報管理部26が電圧検出器47の検出に基づいてバッテリ22の設定値を下回る電圧低下を検知すると、その検知に基づいて駆動制御部24の電源切換部37に電源のバッテリ22から補助バッテリ23への切り換えを指令する。その後、情報管理部26が電圧検出器47の検出に基づいてバッテリ22の冷却などによる回復を検知すると、その検知に基づいて駆動制御部24の電源切換部37に電源をバッテリ22と補助バッテリ23の双方とする切り換えを指令する。
【0024】
給電切換指令部44は、給電モード及び充電定置作業モードにおいては駆動制御部24の給電切換部38にポンプ用インバータ39への給電を指令する。待機モードにおいては駆動制御部24の給電切換部38に各インバータ39〜41への給電停止を指令する。
【0025】
給電モードにおいては、情報管理部26がアクセルセンサ27又は車速設定センサ28の検出に基づいてアクセルペダル8の踏み込み操作又は車速設定レバー9の零速位置以外への操作を検知すると、その検知に基づいて駆動制御部24の給電切換部38に走行用インバータ40への給電を指令する。その後、情報管理部26がアクセルセンサ27及び車速設定センサ28の検出に基づいてアクセルペダル8の踏み込み解除位置への復帰及び車速設定レバー9の零速位置への操作を検知すると、それらの検知に基づいて駆動制御部24の給電切換部38に走行用インバータ40への給電停止を指令する。又、情報管理部26がPTOセンサ34の検出に基づいてPTOレバー14の「入」位置への操作を検知すると、その検知に基づいて駆動制御部24の給電切換部38に作業用インバータ41への給電を指令する。その後、情報管理部26がPTOセンサ34の検出に基づいてPTOレバー14の「切」位置への操作を検知すると、その検知に基づいて駆動制御部24の給電切換部38に作業用インバータ41への給電停止を指令する。
【0026】
充電定置作業モードにおいては、情報管理部26がアクセルセンサ27又は車速設定センサ28の検出に基づいてアクセルペダル8の踏み込み操作又は車速設定レバー9の零速位置以外への操作を検知しているか否かにかかわらず、駆動制御部24の給電切換部38に走行用インバータ40への給電停止を指令する。又、情報管理部26がPTOセンサ34の検出に基づいてPTOレバー14の「入」位置への操作を検知すると、その検知に基づいて駆動制御部24の給電切換部38に作業用インバータ41への給電を指令する。その後、情報管理部26がPTOセンサ34の検出に基づいてPTOレバー14の「切」位置への操作を検知すると、その検知に基づいて駆動制御部24の給電切換部38に作業用インバータ41への給電停止を指令する。
【0027】
速度指令部45は、情報管理部26がアクセルセンサ27、車速設定センサ28、及び舵角センサ30などの検出に基づいて、アクセルペダル8の踏み込み操作量、車速設定レバー9の操作位置、及び、旋回内側の前輪1の操舵角、などを検知すると、それらの検知情報に基づいて各走行用モータ17の必要回転速度を求め、その必要回転速度に対応した駆動制御電流の各走行用モータ17への供給を走行用インバータ40に指令する。
【0028】
上記の構成から、メインスイッチ6の「入」位置への操作後、運転座席15への着座を検知していない状態では、実行モードが待機モードとなって車体の走行及び左右のリフトアーム3やPTO軸4の駆動などを阻止することができる。又、運転座席15への着座を検知している状態では、実行モードが給電モードとなって車体の走行及び左右のリフトアーム3やPTO軸4の駆動などを可能にすることができる。更に、メインスイッチ6を「充電」位置に操作すると、実行モードが充電定置作業モードとなってバッテリ22及び補助バッテリ23への充電を可能にすることができる。そして、この充電定置作業モードでは、駐車ブレーキレバー12による制動操作、又は、運転座席15の非使用位置への揺動操作を行うことで、車体の走行は阻止しながら左右のリフトアーム3やPTO軸4の駆動などを可能にすることができる。
【0029】
その結果、充電中に車体が走行する不都合の発生を未然に回避しながら、灌漑用のポンプや薪割り装置などをPTO軸4に連結してPTO軸4からの動力で駆動することによる灌漑作業や薪割り作業などの定置作業を行うことができる。
【0030】
外部電源46からバッテリ22及び補助バッテリ23への充電は制御装置100の充電制御部48を介して行う。充電制御部48には、AC−DCコンバータ49及びDC−DCコンバータ50を備えている。つまり、商用電源である外部電源46からの電力をAC−DCコンバータ49で交流から直流に変換し、DC−DCコンバータ50で仕様に応じた電圧に変換した後、バッテリ22及び補助バッテリ23に供給する。
【0031】
図4〜6示すように、メインスイッチ6は、シリンダホルダ51に対してキーシリンダ52が「切」位置にある操作状態では、その内部に備えたキーシリンダ側の接点(図示せず)がシリンダホルダ側の各接点(図示せず)から離れることで、バッテリ22及び補助バッテリ23から制御装置100への通電を阻止する。又、キーシリンダ52が「入」位置又は「充電」位置にある操作状態では、キーシリンダ側の接点がシリンダホルダ側の第1接点又は第2接点に接触することで、バッテリ22及び補助バッテリ23から制御装置100に通電する。
【0032】
制御装置100の充電制御部48は、情報管理部26がメインスイッチ6の「充電」位置への操作を検知すると、その検知に基づいてメインスイッチ6を介した給電状態から自己保持回路による給電状態に切り換え、情報管理部26がメインスイッチ6の「切」位置への操作を検知するまで、自己保持回路による給電状態を維持する。
【0033】
又、シリンダホルダ51に形成した凹部53との係合でメインスイッチ6を操縦パネル54のメインスイッチ取付部55への取り付け状態に保持する電磁シリンダ56に通電して電磁シリンダ56を退避作動させることで、メインスイッチ6のメインスイッチ取付部55からの取り出しを可能にする。
【0034】
そして、メインスイッチ6の背部には、車体側の充電用接続端子57を圧縮バネ58でメインスイッチ側に押し出し付勢した状態で配備してあり、これにより、メインスイッチ6をメインスイッチ取付部55から取り外すとともに、車体側の充電用接続端子57をメインスイッチ取付部55の開口近くまで移動させることができる。
【0035】
更に、メインスイッチ取付部55には、メインスイッチ6の取り付け状態ではメインスイッチ6との接触で下方に退避揺動する板バネからなる端子支軸具59を装備してある。端子支軸具59は、メインスイッチ6のメインスイッチ取付部55からの取り外しとともに上方に突出揺動し、その遊端部60が車体側の充電用接続端子57の背面に係合することで、車体側の充電用接続端子57の背面側への移動を阻止するように構成してある。
【0036】
上記の構成から、メインスイッチ6を「充電」位置に操作してメインスイッチ取付部55から取り外すことで、車体側の充電用接続端子57に外部電源側の充電用接続端子61を接続することができ、バッテリ22及び補助バッテリ23の充電を行うことができる。
【0037】
充電が完了してメインスイッチ6のメインスイッチ取付部55への取り付けが行われた後に、情報管理部26がメインスイッチ6の「切」位置への操作を検知すると、制御装置100の充電制御部48は、その検知に基づいて電磁シリンダ56への通電を停止して、電磁シリンダ56を突出作動させてシリンダホルダ51の凹部53に係合させることで、メインスイッチ6のメインスイッチ取付部55からの取り出しを阻止する。
【0038】
尚、図5及び図6に示す符号62は、メインスイッチ6のシリンダホルダ51に備えた通電用の接点であり、符号63は、メインスイッチ6のメインスイッチ取付部55への取り付けに伴ってシリンダホルダ51の接点62と接触するメインスイッチ取付部側の通電用の接点である。又、符号64は、メインスイッチ取付部55の開口側に形成した突条65への係合でメインスイッチ取付部55に対するメインスイッチ6の操作方向での取り付け姿勢を決定する位置決め用の係合溝である。
【0039】
〔別実施形態〕
【0040】
〔1〕図7に示すように、作業車としては、エンジン66、及び、エンジン66からの動力を変速する変速装置67などを介して左右の前輪1及び左右の後輪2に伝動する走行伝動系68を備えたものであってもよい。又、図示は省略するが、エンジン66の代わりに走行用の電動モータを備えて、走行用の電動モータからの動力を走行伝動系69を介して左右の前輪1及び左右の後輪2に伝動するように構成したものであってもよい。
【0041】
〔2〕検出手段32,36としては、ステアリングホイール7を操縦不能位置への操作が可能なチルト機構を備えるものにおいては、ステアリングホイール7の操縦不能位置への操作を検出するものであってもよい。
【0042】
〔3〕電動モータ21として直流モータを採用してもよい。
【産業上の利用可能性】
【0043】
本発明に係る作業車の作業動力取り出し構造は、トラクタ、乗用草刈機、及び乗用田植機、などに適用することができる。
【符号の説明】
【0044】
4 PTO軸
15 運転座席
21 電動モータ
22 バッテリ
23 バッテリ
32 検出手段
35 着座センサ
36 検出手段
46 外部電源
100 制御手段
【技術分野】
【0001】
本発明は、運転座席に対する着座及び退座を検出する着座センサと、前記着座センサの退座検出に伴って車体の走行及び動力取り出し用のPTO軸の駆動を阻止する制御手段とを備えた作業車の作業動力取り出し構造に関する。
【背景技術】
【0002】
作業車の一例であるトラクタでは、制御手段が、着座センサの検出に基づいて運転座席からの退座を検知した場合に、エンジンを自動停止させることで車体の走行及び動力取り出し用のPTO軸の駆動を阻止し、かつ、非使用検出センサの検出に基づいて運転座席の非使用位置への操作を検知した場合に、エンジンの自動停止を行わないように構成したものがある(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−68705号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記の構成では、車体を停止した状態でPTO軸からの動力を利用して、灌漑用のポンプや薪割り装置などを駆動することによる灌漑作業や薪割り作業などの定置作業を行う場合には、エンジンを作動させる必要があることから燃料消費などの面において改善の余地がある。
【0005】
本発明の目的は、燃料消費を招くことなく定置作業を行えるようにすることにある。
【課題を解決するための手段】
【0006】
第1の発明は、運転座席に対する着座及び退座を検出する着座センサと、前記着座センサの退座検出に伴って車体の走行及び動力取り出し用のPTO軸の駆動を阻止する制御手段とを備えた作業車の作業動力取り出し構造において、
前記PTO軸を駆動する電動モータと、この電動モータに電力を供給するバッテリと、車体の走行不能状態を検出する検出手段とを備え、
前記制御手段が、前記検出手段の検出に基づいて車体の走行不能状態を検知した場合に、前記電動モータによる前記PTO軸の駆動を許容するように構成してある。
【0007】
第1の発明によると、エンジンを作動させることなく、バッテリからの電力で駆動したPTO軸からの動力で定置作業を行うことができる。そして、電動モータによるPTO軸の駆動は、検出手段が車体の走行不能状態を検出している状態において可能になることから、定置作業時に車体が不測に走行する虞を未然に回避することができる。
【0008】
従って、燃料消費を招くことなく定置作業を行うことができる上に、定置作業時における車体の走行を阻止することができる。
【0009】
第2の発明は、上記第1の発明において、
前記バッテリへの外部電源からの充電を可能に構成し、
前記制御手段が、前記外部電源から前記バッテリへの充電中に前記検出手段の検出に基づいて車体の走行不能状態を検知した場合に、前記電動モータによる前記PTO軸の駆動を許容するように構成してある。
【0010】
第2の発明によると、外部電源からバッテリへの充電中においても定置作業を行うことができ、作業効率の向上を図ることができる。又、充電中における車体の走行を阻止することができる。
【図面の簡単な説明】
【0011】
【図1】電動トラクタの全体右側面図である。
【図2】電動トラクタの制御構成を示す概略平面図である。
【図3】電動トラクタの制御構成を示すブロック図である。
【図4】メインスイッチの正面図である。
【図5】メインスイッチの着脱構造を示す要部の縦断側面図である。
【図6】メインスイッチを取り外した充電可能状態を示す要部の縦断側面図である。
【図7】別実施形態でのトラクタの伝動構成を示す概略平面図である。
【発明を実施するための形態】
【0012】
以下、本発明を実施するための形態の一例として、本発明に係る作業車の作業動力取り出し構造を、作業車の一例である電動トラクタに適用した実施形態を図面に基づいて説明する。
【0013】
図1及び図2示すように、この実施形態で例示する電動トラクタは、操向輪としての左右の前輪1と駆動輪としての左右の後輪2とを備えた車体の後部に、油圧式のリフトシリンダ(図示せず)の作動で昇降揺動する左右一対のリフトアーム3や、作業用の動力の外部への取り出しを可能にするPTO軸4などを装備してある。これにより、この電動トラクタは、その後部にロータリ耕耘装置やプラウなどの作業装置(図示せず)を昇降駆動可能に連結することができ、かつ、ロータリ耕耘装置などの駆動型の作業装置に供給する動力の取り出しが可能となるように構成してある。
【0014】
車体の後半部には搭乗運転部5を形成してある。搭乗運転部5には、キー操作式のメインスイッチ6、前輪操舵用のステアリングホイール7、踏み込み解除位置に自動復帰するアクセルペダル8、位置保持型の車速設定レバー9、位置保持型の前後進切換レバー10、踏み込み解除位置に自動復帰する左右一対のブレーキペダル11、位置保持型の駐車ブレーキレバー12、位置保持型の昇降レバー13、及び、位置保持型のPTOレバー14、などの各種の操作具、並びに運転座席15、などを備えてある。運転座席15は、その前部に備えた左右向きの支軸16を支点にした揺動操作で、着座が可能な使用位置と着座を阻止した非使用位置とに位置変更可能に構成してある。
【0015】
図2及び図3示すように、左右の後輪2は左右の走行用モータ17で駆動する。リフトシリンダなどの各種の油圧アクチュエータは、ポンプ用モータ18で駆動した油圧ポンプ19からのオイルの流量などを電磁制御弁(図示せず)などの各種の油圧機器を備えた電子油圧制御ユニット20を介して制御することで適正に駆動する。PTO軸4は作業用モータ21で駆動する。左右の走行用モータ17にはインホイール型の交流モータを採用してある。ポンプ用モータ18及び作業用モータ21には交流モータを採用してある。
【0016】
この電動トラクタには、マイクロコンピュータなどを搭載した複数の電子制御ユニットなどで構成した制御装置(制御手段)100を搭載してある。制御装置100は、メインスイッチ6の「入」位置又は「充電」位置への操作で得られる充放電式のバッテリ22又は補助バッテリ23からの電力で起動する。又、メインスイッチ91の「切」位置への操作でバッテリ22又は補助バッテリ23からの電力が断たれると、その内部に備えた自己保持回路(図示せず)によって所定時間の間は給電状態を維持し、メインスイッチ91が「切」位置に操作された段階での各種の情報をEEPROMに記憶した後、所定時間の経過とともに自己保持回路による給電を停止して作動を停止する。
【0017】
各モータ17,18,21には、制御装置100の駆動制御部24を介してバッテリ22又は補助バッテリ23からの電力を供給する。駆動制御部24は、電子油圧制御ユニット20などの作動を制御する制御装置100の作動制御部25からの制御指令に基づいて、各モータ17,18,21に供給する電力量などを制御して各モータ17,18,21を適正に駆動する。作動制御部25は、各種のスイッチ及びセンサなどの情報出力手段からの出力情報を管理する制御装置100の情報管理部26からの情報に基づいて、その情報に適した制御指令を電子油圧制御ユニット20及び駆動制御部24などに出力する。
【0018】
駆動制御部24、作動制御部25、及び情報管理部26などは、車載LANや車載電力線などを介して相互通信可能かつ電力供給可能に接続してある。
【0019】
情報管理部26が管理する情報には、メインスイッチ6の操作位置、アクセルセンサ27が検出するアクセルペダル8の踏み込み操作量、車速設定センサ28が検出する車速設定レバー9の操作位置、前後進センサ29が検出する前後進切換レバー10の操作位置、舵角センサ30が旋回内側の前輪1の操舵角として検出するピットマンアーム31の直進位置からの操作角、駐車ブレーキスイッチ(検出手段の一例)32が検出する駐車ブレーキレバー12の操作位置、昇降センサ33が検出する昇降レバー13の操作位置、PTOセンサ34が検出するPTOレバー14の操作位置、着座センサ35が検出する運転座席15に対する着座の有無、及び、座席スイッチ(検出手段の一例)36が検出する運転座席15の操作位置、などである。
【0020】
上記の構成から、制御装置100は、アクセルペダル8の踏み込み操作量及び車速設定レバー9の操作位置などに基づいて左右の走行用モータ17の回転速度を制御する速度制御、前後進切換レバー10の操作位置などに基づいて左右の走行用モータ17の回転方向を切り換える前後進切り換え制御、前輪1の操舵角などに基づいて左右の後輪2を差動させる差動制御、昇降レバー13の操作位置などに基づいてリフトアームを昇降揺動させる昇降制御、及び、PTOレバー14の操作位置などに基づいて作業用モータ21を作動状態と停止状態とに切り換えるPTO駆動制御、などを行うことができる。
【0021】
駆動制御部24は、電源切換部37、給電切換部38、ポンプ用インバータ39、走行用インバータ40、及び作業用インバータ41を備えている。電源切換部37は、作動制御部25からの電源切り換え指令に基づいて、電源をバッテリ22とする状態と補助バッテリ23とする状態とそれらの双方とする状態とに切り換える。給電切換部38は、作動制御部25からの給電切り換え指令に基づいて、電力をポンプ用インバータ39に供給する状態と、ポンプ用インバータ39及び走行用インバータ40に供給する状態と、ポンプ用インバータ39及び作業用インバータ41に供給する状態と、各インバータ39〜41に供給する状態とに切り換える。ポンプ用インバータ39は、ポンプ用モータ18に電力を供給して油圧ポンプ19を適正に駆動する。走行用インバータ40は、作動制御部25からの速度指令に基づいて、左右の走行用モータ17に供給する駆動制御電流(例えばPWM信号)を制御して左右の走行用モータ17の回転速度を適正に変更する。作業用インバータ41は、作業用モータ21に電力を供給してPTO軸4を適正に駆動する。
【0022】
作動制御部25は、実行モード切換部42、電源切換指令部43、給電切換指令部44、及び速度指令部45を備えている。実行モード切換部42は、情報管理部26がメインスイッチ6の「入」位置への操作を検知している状態で、着座センサ35の検出に基づいて運転座席15への着座を検知すると、それらの検知に基づいて、バッテリ22及び補助バッテリ23から各モータ17,18,21などへの給電を可能にして、車体の走行やPTO軸4の駆動などを可能にする給電モードを実行する。又、情報管理部26がメインスイッチ6の「切」位置への操作、又は、着座センサ35の検出に基づいて運転座席15からの退座を検知すると、その検知に基づいて、バッテリ22及び補助バッテリ23から各モータ17,18,21などへの給電を停止して、車体の走行やPTO軸4の駆動などを阻止する待機モードを実行する。一方、情報管理部26がメインスイッチ6の「充電」位置への操作を検知していると、その検知に基づいて、外部電源46からバッテリ22及び補助バッテリ23への充電を可能にする充電モードを実行する。そして、情報管理部26がメインスイッチ6の「充電」位置への操作を検知している状態で、駐車ブレーキスイッチ32又は座席スイッチ36の検出に基づいて駐車ブレーキレバー12の制動解除位置からの離脱操作又は運転座席15の非使用位置への操作を検知すると、それらの検知に基づいて、バッテリ22及び補助バッテリ23への充電を可能にしながら、バッテリ22及び補助バッテリ23からポンプ用モータ18及び作業用モータ21への給電を可能にして、左右のリフトアーム3やPTO軸4の駆動などを可能にする充電定置作業モードを実行する。
【0023】
電源切換指令部43は、給電モードにおいて、情報管理部26がバッテリ用の電圧検出器47の検出に基づいてバッテリ22の電圧が設定値を超えていることを検知していると、その検知に基づいて駆動制御部24の電源切換部37に電源としてバッテリ22の使用を指令する。又、情報管理部26が電圧検出器47の検出に基づいてバッテリ22の設定値を下回る電圧低下を検知すると、その検知に基づいて駆動制御部24の電源切換部37に電源のバッテリ22から補助バッテリ23への切り換えを指令する。その後、情報管理部26が電圧検出器47の検出に基づいてバッテリ22の冷却などによる回復を検知すると、その検知に基づいて駆動制御部24の電源切換部37に電源をバッテリ22と補助バッテリ23の双方とする切り換えを指令する。
【0024】
給電切換指令部44は、給電モード及び充電定置作業モードにおいては駆動制御部24の給電切換部38にポンプ用インバータ39への給電を指令する。待機モードにおいては駆動制御部24の給電切換部38に各インバータ39〜41への給電停止を指令する。
【0025】
給電モードにおいては、情報管理部26がアクセルセンサ27又は車速設定センサ28の検出に基づいてアクセルペダル8の踏み込み操作又は車速設定レバー9の零速位置以外への操作を検知すると、その検知に基づいて駆動制御部24の給電切換部38に走行用インバータ40への給電を指令する。その後、情報管理部26がアクセルセンサ27及び車速設定センサ28の検出に基づいてアクセルペダル8の踏み込み解除位置への復帰及び車速設定レバー9の零速位置への操作を検知すると、それらの検知に基づいて駆動制御部24の給電切換部38に走行用インバータ40への給電停止を指令する。又、情報管理部26がPTOセンサ34の検出に基づいてPTOレバー14の「入」位置への操作を検知すると、その検知に基づいて駆動制御部24の給電切換部38に作業用インバータ41への給電を指令する。その後、情報管理部26がPTOセンサ34の検出に基づいてPTOレバー14の「切」位置への操作を検知すると、その検知に基づいて駆動制御部24の給電切換部38に作業用インバータ41への給電停止を指令する。
【0026】
充電定置作業モードにおいては、情報管理部26がアクセルセンサ27又は車速設定センサ28の検出に基づいてアクセルペダル8の踏み込み操作又は車速設定レバー9の零速位置以外への操作を検知しているか否かにかかわらず、駆動制御部24の給電切換部38に走行用インバータ40への給電停止を指令する。又、情報管理部26がPTOセンサ34の検出に基づいてPTOレバー14の「入」位置への操作を検知すると、その検知に基づいて駆動制御部24の給電切換部38に作業用インバータ41への給電を指令する。その後、情報管理部26がPTOセンサ34の検出に基づいてPTOレバー14の「切」位置への操作を検知すると、その検知に基づいて駆動制御部24の給電切換部38に作業用インバータ41への給電停止を指令する。
【0027】
速度指令部45は、情報管理部26がアクセルセンサ27、車速設定センサ28、及び舵角センサ30などの検出に基づいて、アクセルペダル8の踏み込み操作量、車速設定レバー9の操作位置、及び、旋回内側の前輪1の操舵角、などを検知すると、それらの検知情報に基づいて各走行用モータ17の必要回転速度を求め、その必要回転速度に対応した駆動制御電流の各走行用モータ17への供給を走行用インバータ40に指令する。
【0028】
上記の構成から、メインスイッチ6の「入」位置への操作後、運転座席15への着座を検知していない状態では、実行モードが待機モードとなって車体の走行及び左右のリフトアーム3やPTO軸4の駆動などを阻止することができる。又、運転座席15への着座を検知している状態では、実行モードが給電モードとなって車体の走行及び左右のリフトアーム3やPTO軸4の駆動などを可能にすることができる。更に、メインスイッチ6を「充電」位置に操作すると、実行モードが充電定置作業モードとなってバッテリ22及び補助バッテリ23への充電を可能にすることができる。そして、この充電定置作業モードでは、駐車ブレーキレバー12による制動操作、又は、運転座席15の非使用位置への揺動操作を行うことで、車体の走行は阻止しながら左右のリフトアーム3やPTO軸4の駆動などを可能にすることができる。
【0029】
その結果、充電中に車体が走行する不都合の発生を未然に回避しながら、灌漑用のポンプや薪割り装置などをPTO軸4に連結してPTO軸4からの動力で駆動することによる灌漑作業や薪割り作業などの定置作業を行うことができる。
【0030】
外部電源46からバッテリ22及び補助バッテリ23への充電は制御装置100の充電制御部48を介して行う。充電制御部48には、AC−DCコンバータ49及びDC−DCコンバータ50を備えている。つまり、商用電源である外部電源46からの電力をAC−DCコンバータ49で交流から直流に変換し、DC−DCコンバータ50で仕様に応じた電圧に変換した後、バッテリ22及び補助バッテリ23に供給する。
【0031】
図4〜6示すように、メインスイッチ6は、シリンダホルダ51に対してキーシリンダ52が「切」位置にある操作状態では、その内部に備えたキーシリンダ側の接点(図示せず)がシリンダホルダ側の各接点(図示せず)から離れることで、バッテリ22及び補助バッテリ23から制御装置100への通電を阻止する。又、キーシリンダ52が「入」位置又は「充電」位置にある操作状態では、キーシリンダ側の接点がシリンダホルダ側の第1接点又は第2接点に接触することで、バッテリ22及び補助バッテリ23から制御装置100に通電する。
【0032】
制御装置100の充電制御部48は、情報管理部26がメインスイッチ6の「充電」位置への操作を検知すると、その検知に基づいてメインスイッチ6を介した給電状態から自己保持回路による給電状態に切り換え、情報管理部26がメインスイッチ6の「切」位置への操作を検知するまで、自己保持回路による給電状態を維持する。
【0033】
又、シリンダホルダ51に形成した凹部53との係合でメインスイッチ6を操縦パネル54のメインスイッチ取付部55への取り付け状態に保持する電磁シリンダ56に通電して電磁シリンダ56を退避作動させることで、メインスイッチ6のメインスイッチ取付部55からの取り出しを可能にする。
【0034】
そして、メインスイッチ6の背部には、車体側の充電用接続端子57を圧縮バネ58でメインスイッチ側に押し出し付勢した状態で配備してあり、これにより、メインスイッチ6をメインスイッチ取付部55から取り外すとともに、車体側の充電用接続端子57をメインスイッチ取付部55の開口近くまで移動させることができる。
【0035】
更に、メインスイッチ取付部55には、メインスイッチ6の取り付け状態ではメインスイッチ6との接触で下方に退避揺動する板バネからなる端子支軸具59を装備してある。端子支軸具59は、メインスイッチ6のメインスイッチ取付部55からの取り外しとともに上方に突出揺動し、その遊端部60が車体側の充電用接続端子57の背面に係合することで、車体側の充電用接続端子57の背面側への移動を阻止するように構成してある。
【0036】
上記の構成から、メインスイッチ6を「充電」位置に操作してメインスイッチ取付部55から取り外すことで、車体側の充電用接続端子57に外部電源側の充電用接続端子61を接続することができ、バッテリ22及び補助バッテリ23の充電を行うことができる。
【0037】
充電が完了してメインスイッチ6のメインスイッチ取付部55への取り付けが行われた後に、情報管理部26がメインスイッチ6の「切」位置への操作を検知すると、制御装置100の充電制御部48は、その検知に基づいて電磁シリンダ56への通電を停止して、電磁シリンダ56を突出作動させてシリンダホルダ51の凹部53に係合させることで、メインスイッチ6のメインスイッチ取付部55からの取り出しを阻止する。
【0038】
尚、図5及び図6に示す符号62は、メインスイッチ6のシリンダホルダ51に備えた通電用の接点であり、符号63は、メインスイッチ6のメインスイッチ取付部55への取り付けに伴ってシリンダホルダ51の接点62と接触するメインスイッチ取付部側の通電用の接点である。又、符号64は、メインスイッチ取付部55の開口側に形成した突条65への係合でメインスイッチ取付部55に対するメインスイッチ6の操作方向での取り付け姿勢を決定する位置決め用の係合溝である。
【0039】
〔別実施形態〕
【0040】
〔1〕図7に示すように、作業車としては、エンジン66、及び、エンジン66からの動力を変速する変速装置67などを介して左右の前輪1及び左右の後輪2に伝動する走行伝動系68を備えたものであってもよい。又、図示は省略するが、エンジン66の代わりに走行用の電動モータを備えて、走行用の電動モータからの動力を走行伝動系69を介して左右の前輪1及び左右の後輪2に伝動するように構成したものであってもよい。
【0041】
〔2〕検出手段32,36としては、ステアリングホイール7を操縦不能位置への操作が可能なチルト機構を備えるものにおいては、ステアリングホイール7の操縦不能位置への操作を検出するものであってもよい。
【0042】
〔3〕電動モータ21として直流モータを採用してもよい。
【産業上の利用可能性】
【0043】
本発明に係る作業車の作業動力取り出し構造は、トラクタ、乗用草刈機、及び乗用田植機、などに適用することができる。
【符号の説明】
【0044】
4 PTO軸
15 運転座席
21 電動モータ
22 バッテリ
23 バッテリ
32 検出手段
35 着座センサ
36 検出手段
46 外部電源
100 制御手段
【特許請求の範囲】
【請求項1】
運転座席に対する着座及び退座を検出する着座センサと、前記着座センサの退座検出に伴って車体の走行及び動力取り出し用のPTO軸の駆動を阻止する制御手段とを備えた作業車の作業動力取り出し構造において、
前記PTO軸を駆動する電動モータと、この電動モータに電力を供給するバッテリと、車体の走行不能状態を検出する検出手段とを備え、
前記制御手段が、前記検出手段の検出に基づいて車体の走行不能状態を検知した場合に、前記電動モータによる前記PTO軸の駆動を許容するように構成してある作業車の作業動力取り出し構造。
【請求項2】
前記バッテリへの外部電源からの充電を可能に構成し、
前記制御手段が、前記外部電源から前記バッテリへの充電中に前記検出手段の検出に基づいて車体の走行不能状態を検知した場合に、前記電動モータによる前記PTO軸の駆動を許容するように構成してある請求項1に記載の作業車の作業動力取り出し構造。
【請求項1】
運転座席に対する着座及び退座を検出する着座センサと、前記着座センサの退座検出に伴って車体の走行及び動力取り出し用のPTO軸の駆動を阻止する制御手段とを備えた作業車の作業動力取り出し構造において、
前記PTO軸を駆動する電動モータと、この電動モータに電力を供給するバッテリと、車体の走行不能状態を検出する検出手段とを備え、
前記制御手段が、前記検出手段の検出に基づいて車体の走行不能状態を検知した場合に、前記電動モータによる前記PTO軸の駆動を許容するように構成してある作業車の作業動力取り出し構造。
【請求項2】
前記バッテリへの外部電源からの充電を可能に構成し、
前記制御手段が、前記外部電源から前記バッテリへの充電中に前記検出手段の検出に基づいて車体の走行不能状態を検知した場合に、前記電動モータによる前記PTO軸の駆動を許容するように構成してある請求項1に記載の作業車の作業動力取り出し構造。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−68177(P2013−68177A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−208131(P2011−208131)
【出願日】平成23年9月22日(2011.9.22)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月22日(2011.9.22)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
[ Back to top ]