
作業車両のエンジン負荷制御装置
【課題】作業時に過負荷がかかった場合において、作業形態に応じて減速割合を変更可能とし、負荷制御のモードを切換可能な作業車両のエンジン負荷制御装置を提供する。
【解決手段】作業車両のエンジン負荷制御装置において、エンジン負荷制御装置50は、エンジン回転数を設定エンジン回転数Xsに保つように、エンジン21が過負荷となった時の負荷に応じて、車速を増減し、又は作業機30を昇降する構成とし、負荷車速制御と負荷作業機昇降制御との制御優先順位を設定する制御実行順序設定手段52を備える。
【解決手段】作業車両のエンジン負荷制御装置において、エンジン負荷制御装置50は、エンジン回転数を設定エンジン回転数Xsに保つように、エンジン21が過負荷となった時の負荷に応じて、車速を増減し、又は作業機30を昇降する構成とし、負荷車速制御と負荷作業機昇降制御との制御優先順位を設定する制御実行順序設定手段52を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、トラクタ等の作業車両において、エンジンに負荷がかかった時の負荷車速制御と、「負荷作業機昇降制御」の技術に関する。
【背景技術】
【0002】
従来、トラクタ等の作業車両は、車体後部に作業機を連結して、圃場を走行しながら作業を行う。作業車両に搭載したエンジンの駆動力は、油圧式変速手段により変速し走行部へ伝達する。また、PTO変速手段により変速された後PTO軸を介して作業機へと伝達される。圃場の硬軟や作業深さや傾斜等の状態による様々な条件により、作業機に対する負荷状態が変動することで、エンジンに過負荷がかかり、回転数が減少し、延いてはエンジンが停止することもあった。
【0003】
この問題を解消するために、例えば特許文献1に示すように、走行機体(作業車両)に負荷車速制御手段を設けて、エンジンの過負荷時に、負荷が所定値以上になると、走行機体の車速を所定比率(減速割合、例えば速度の70%)または所定量減速(例えば、3km/hから2km/h、または、3速から2速)するように制御することが開示されている。
【0004】
しかし、トラクタ等の作業車両において、減速割合が固定されていると(例えば速度の50%、最大4km/hから2km/hまで)、ロータリー耕耘装置による作業の場合に最大減速すると、耕耘ピッチが急に変化し、減速時に多量の土がリアカバー側に回り込むこととなり減速位置から仕上がりが異なる。一方、過負荷がかかると作業機を上昇させる制御であれば、モアによる芝刈り作業では、過負荷がかかると刈り高さが高くなり仕上がりが異なることになるが、過負荷がかかると所定量減速する制御では、過負荷がかかったときに最大減速しても作業機の高さは変化しないので仕上がりに大きな影響はない。このように、過負荷時に最大減速割合が固定である負荷制御や作業機を上昇させる制御では、作業の形態によって仕上がりが異なることが生じる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平10−339181号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、以上の如き状況を鑑みてなされたものであり、作業時に過負荷がかかった場合において、作業形態に応じて減速割合を変更可能とし、負荷制御のモードを切換可能な作業車両のエンジン負荷制御装置を提供することを課題とする。
【課題を解決するための手段】
【0007】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0008】
請求項1においては、エンジン(21)と、該エンジン(21)の検知する手段(61)と、前記エンジンの負荷を検知する手段と、前記エンジン(21)からの出力を変速し、駆動系に伝達する変速機(23)と、該変速機(23)を制御する手段と、作業車両(100)に装着する作業機(30)と、該作業機(30)を昇降する手段(22)とを備え、該エンジン(21)が過負荷状態になると車速を減速する負荷車速制御,作業機を昇降する負荷作業機昇降制御を行う、エンジン負荷制御装置(50)を具備し、該エンジン負荷制御装置(50)は、エンジン回転数を設定エンジン回転数(Xs)に保つように、該エンジン(21)が過負荷となった時の負荷に応じて、車速を増減し、又は作業機(30)を昇降する構成とし、前記負荷車速制御と、前記負荷作業機昇降制御との、制御優先順位を設定する制御実行順序設定手段(52)を備えるものである。
【0009】
請求項2においては、請求項1記載の作業車両のエンジン負荷制御装置において、該制御実行順序設定手段(52)は、「負荷車速制御優先モード」と、「負荷作業機昇降制御優先モード」と、「負荷車速制御モード」と、「負荷作業機昇降モード」を選択設定し、「負荷車速制御優先モード」は、エンジン(21)に過負荷がかかると先ず負荷車速制御を行い、さらにエンジン21に過負荷がかかっていると負荷作業機昇降制御を行い、「負荷作業機昇降制御優先モード」は、エンジン(21)に過負荷がかかると先ず負荷作業機昇降制御を行い、さらにエンジン21に過負荷がかかっていると負荷車速制御を行い、「負荷車速制御モード」は、エンジン(21)に過負荷がかかると負荷車速制御のみを行い、「負荷作業機昇降モード」は、エンジン(21)に過負荷がかかると負荷車速制御のみを行うものである。
【発明の効果】
【0010】
本発明の効果として、以下に示すような効果を奏する。
【0011】
請求項1においては、エンジン(21)と、該エンジン(21)の検知する手段(61)と、前記エンジンの負荷を検知する手段と、前記エンジン(21)からの出力を変速し、駆動系に伝達する変速機(23)と、該変速機(23)を制御する手段と、作業車両(100)に装着する作業機(30)と、該作業機(30)を昇降する手段(22)とを備え、該エンジン(21)が過負荷状態になると車速を減速する負荷車速制御,作業機を昇降する負荷作業機昇降制御を行う、エンジン負荷制御装置(50)を具備し、該エンジン負荷制御装置(50)は、エンジン回転数を設定エンジン回転数(Xs)に保つように、該エンジン(21)が過負荷となった時の負荷に応じて、車速を増減し、又は作業機(30)を昇降する構成とし、前記負荷車速制御と、前記負荷作業機昇降制御との、制御優先順位を設定する制御実行順序設定手段(52)を備えるので、負荷車速制御だけでなく作業機を設定上昇させる制御を行うことで、負荷車速制御が多種多様になり、オペレーターの選択肢が広がる。設定値によって、オペレーターの意図で作業仕上げを優先するか、作業時間を優先するかを選択することができる。
【0012】
請求項2においては、請求項1記載の作業車両のエンジン負荷制御装置において、該制御実行順序設定手段(52)は、「負荷車速制御優先モード」と、「負荷作業機昇降制御優先モード」と、「負荷車速制御モード」と、「負荷作業機昇降モード」を選択設定し、「負荷車速制御優先モード」は、エンジン(21)に過負荷がかかると先ず負荷車速制御を行い、さらにエンジン21に過負荷がかかっていると負荷作業機昇降制御を行い、「負荷作業機昇降制御優先モード」は、エンジン(21)に過負荷がかかると先ず負荷作業機昇降制御を行い、さらにエンジン21に過負荷がかかっていると負荷車速制御を行い、「負荷車速制御モード」は、エンジン(21)に過負荷がかかると負荷車速制御のみを行い、「負荷作業機昇降モード」は、エンジン(21)に過負荷がかかると負荷車速制御のみを行うので、負荷車速制御が多種多様になり、オペレーターの選択肢が広がる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態にかかる制御ブロック回路を示した図。
【図2】エンジン負荷制御装置のフローチャートを示した図。
【図3】同じく負荷車速制御のみのフローチャートを示した図。
【図4】同じく負荷作業機昇降制御のみのフローチャートを示した図。
【図5】最大減速割合設定手段または増減速率設定手段を示した図。
【図6】制御優先順序設定手段を示した図。
【図7】本発明の実施形態にかかる作業車両を示した側面図。
【発明を実施するための形態】
【0014】
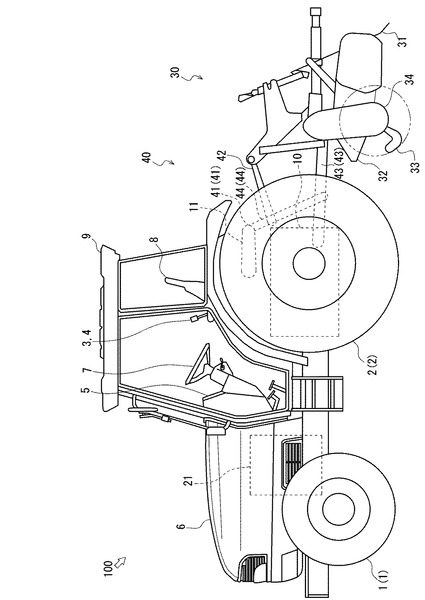
次に、本発明の実施形態にかかる作業車両100はトラクタとし、該トラクタに連結する作業機30をロータリー耕耘機として、その全体構成について、図7を用いて説明する。作業車両100は、機体の両側前部に支承される前輪1・1と、機体の両側後部に支承される後輪2・2とを備える。さらに、機体前部のボンネット6内部には、原動機となるエンジン21を配置し、ボンネット6の後方にはキャビン9を配置している。キャビン9内の前部には、操向ハンドル7を設け、操向ハンドル7の前方には表示パネル5を配置し、操向ハンドル7の後方には座席8を配置している。また、座席8の側部には主変速レバー3、副変速レバー4、耕深設定手段(作業高さ設定手段75)となる耕深設定ダイヤル等が配置され、操向ハンドル7のハンドルコラム側部に前後進切換レバーが配置されている。そして、前記座席8前下方のステップ上にはブレーキペダルや主クラッチペダルやデフロックペダル等が配設されている。
【0015】
また、図7に示すように、エンジン21の後部には伝動ハウジングを配置し、該伝動ハウジング後部には、油圧式無段変速装置23を収納したミッションケース10を配置し、エンジン21からの動力を変速した後に後輪2・2に伝達して駆動し、四輪駆動切換機構を介して前輪1・1にも同時に駆動力を伝達することを可能としている。
【0016】
作業機連結装置40は、主としてトップリンク42、ロアリンク43・43、リフトロッド44・44を備える。トップリンク42は、ミッションケース10の後部に固設したトップリンクブラケット(図示省略)に回動自在に連結する。ロアリンク43・43は、ミッションケース10またはリヤアクスルハウジングの両側に回動自在に連結する。リフトロッド44・44は、一端をロアリンク43・43の前後中途部に回動自在に連結し、他端を前記油圧ケース11より後方に突出したリフトアーム41・41に回動自在に連結する。トップリンク42およびロアリンク43・43の後端には、作業機30であるロータリー耕耘機を連結する。
【0017】
前記リフトアーム41・41は、油圧シリンダーの伸縮により回動され、該油圧シリンダーは電磁バルブ等の昇降アクチュエータ22(図7中図示省略)を切換ることにより圧油の送油方向が切換られて伸縮し、該昇降アクチュエータ22は図1に示すようにコントローラ54と接続されて、ロータリー耕耘機を負荷作業機昇降制御可能としている。また、リフトアーム41・41の回動基部には作業機高さ検知手段63が配置され、該作業機高さ検知手段63はコントローラ54と接続されて、作業機の高さを検知して昇降高さを制御(昇降制御)可能としている。
【0018】
ロータリー耕耘機(作業機30)は、主に耕耘軸、耕耘爪33、耕耘カバー32、リアカバー31等を備える。耕耘爪33・33・・・は左右方向に回転自在に横架した耕耘軸上に適宜間隔をあけて放射状に植設され、該耕耘爪33・33・・・の先端の回転軌跡の上方及び側方を覆うように耕耘カバー32が配置され、該耕耘カバー32の後端にはリアカバー31の前端が回動自在に連結される。前記耕耘軸はチェーンケース34、ギヤケース、ユニバーサルジョイント等を介して、前記ミッションケース10の後面より後方に突出したPTО軸と連動連結されて、エンジン21からの動力を耕耘爪33に伝達して回転駆動可能としている。
【0019】
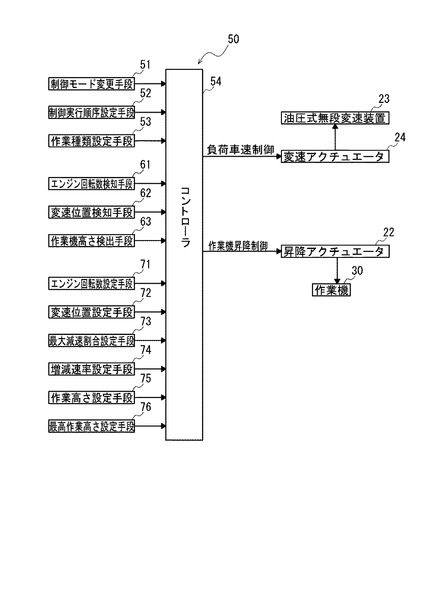
さらに、本発明の実施形態にかかるエンジン負荷制御装置50について、図1および図7を用いて説明する。エンジン負荷制御装置50は、エンジン回転数を設定エンジン回転数Xsに保つように、エンジン21が過負荷となった時の負荷に応じて車速を増減する負荷車速制御と、作業機30を昇降する負荷作業機昇降制御とを行う。エンジン負荷制御装置50は、主としてモード変更手段51、制御実行順序設定手段52、作業種類設定手段53、エンジン回転数検知手段61、変速位置検知手段62、作業機高さ検知手段63、エンジン回転数設定手段71、変速位置設定手段72、最大減速割合設定手段73、増減速率設定手段74、作業機高さ設定手段75、最高作業機高さ設定手段76、およびコントローラ54を備える。
【0020】
本実施形態のエンジン21が、過負荷状態か否かを判断する閾値である負荷率は、エンジン回転数設定手段71で設定した設定エンジン回転数Xsと、エンジン回転数検知手段61で検知した実際のエンジン回転数Xr(以下、実エンジン回転数Xrとする)よりマップ等を用いて算出される。但し、実エンジン回転数Xrと燃料噴射量より算出することも可能であり、その負荷の算出方法は限定するものではない。また、実負荷率((設定エンジン回転数Xs−実エンジン回転数Xr)/設定エンジン回転数Xs)が、例えば予め設定された負荷率である第一設定過負荷率L1が、本実施例では0.10以上となると過負荷がかかったとして説明する。また、第一設定過負荷率L1(第二設定過負荷率L2)は任意に設定可能とする。
【0021】
以下に前記各手段について各々説明する。
【0022】
モード変更手段51は、負荷車速制御自体を行うか否かの設定を行う手段であり、押下することで「ON」と「OFF」が切り替わるボタン式のスイッチにより構成する。
【0023】
制御実行順序設定手段52は、負荷車速制御および負荷作業機昇降制御のどちらか一方を優先的に行うよう設定する設定手段である。また、負荷車速制御のみ、または作業機負荷作業機昇降制御のみを制御するように設定とすることも可能である。制御実行順序設定手段52は、回動操作することにより調節可能なダイヤル式のスイッチ等で構成する。詳細については後述する。
【0024】
エンジン回転数検知手段61は、実エンジン回転数Xrを検知するための手段であり、磁気ピックアップ式のセンサーや、ロータリエンコーダ等を用いて、エンジン21近傍のフライホイールまたはクランク軸(図示省略)の回転数を検知するものである。
【0025】
エンジン回転数設定手段71は、アクセルレバーまたはアクセルペダル等を操作してエンジン回転数を設定するものであり、その設定値はアクセルレバーまたはアクセルペダルの回動基部に配置した角度検知手段により検知し、設定エンジン回転数Xsとしてコントローラ54に入力する構成としている。
【0026】
変速位置検知手段62は、油圧式無段変速装置23の負荷車速制御を司る、油圧ポンプまたは油圧モーターの斜板角度の変速位置(以下、実変速位置Vrとする)を検知するセンサー等で構成する。この変速はモーターやシリンダー等で構成した変速アクチュエータ24により行う。また、作業車両100の実際の車速(走行速度)を検知するための手段であり、検出値を基に後述するコントローラ54にて車速を算出する。但し、変速位置は変速アームの角度を検出したりすることも可能であり、変速位置検知構成は限定しない。
【0027】
変速位置設定手段72は、変速アクチュエータ24の変位位置(設定変速位置Vsとする)を設定する手段であって、主変速レバー3等により構成される。つまり、変速位置設定手段72によって、車速が設定され、該変速位置設定手段72の操作位置がセンサーにより検知されコントローラ54に入力される。
【0028】
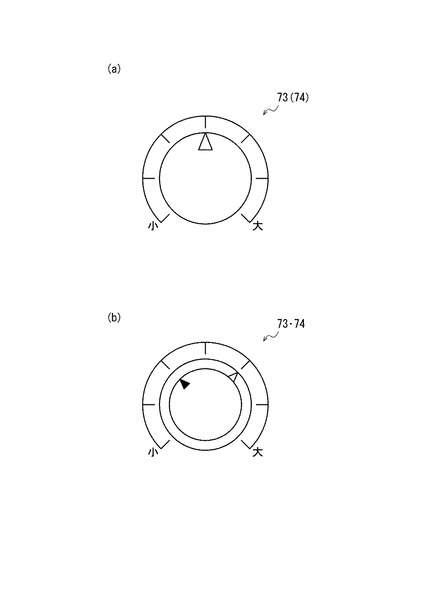
最大減速割合設定手段73は、エンジン21に過負荷がかかった場合に、設定変速位置Vsから最大減速できる割合(以下、最大減速割合Aとする)を設定する手段である。つまり、エンジン21が過負荷となった場合に、設定変速位置Vs(設定車速)に対して最大減速できる割合まで減速させることで、走行部である後輪2や作業機30等の駆動系のトルクを増大させて、エンジン21の過負荷を回避する。最大減速割合設定手段73は、作業、または、装着した作業機30の種類に合わせて設定できるようにしている。この作業、または、装着した作業機30の種類は、回動操作することにより所定の位置に調節可能なダイヤル式のスイッチ(図5の(a)参照)等で構成する。
【0029】
ここで、前記最大減速割合Aについて説明する。最大減速割合Aとは、エンジン21に過負荷がかかる前の変速レバー等で設定した設定変速位置Vs(設定車速)を100%とした場合、どの程度(変速位置)まで最大減速できるかの割合であり、最大減速割合設定手段73により設定する。例えば、最大減速割合Aを85%に設定した場合、作業車両100の設定車速(設定変速位置Vs)を3km/hに設定し作業を行っている時に、エンジン21に過負荷がかかると、その負荷に応じて負荷車速制御により95%、90%と減速してエンジン21の過負荷を解消しようとするが、最大減速できる車速は、3km/h×0.85=2.55km/hまで減速できるものとする。
【0030】
この最大減速割合Aは、オペレーターの操作により任意に設定することも可能であるが、経験の浅いオペレーターや高齢者等では設定が難しくなるので、作業の種類や作業機の種類に合わせて設定するように構成することもできる。
【0031】
つまり、ロータリー耕耘作業を行う場合、または、ロータリー耕耘機を装着している場合には、最大減速割合設定手段73を85%に自動的に設定し、芝刈り作業を行う場合、または、モアを装着した場合には最大減速割合設定手段73を50%に自動的に設定されるようにするのである。具体的には、最大減速割合設定手段73には作業の種類(耕耘作業や芝刈り作業やトレンチャ作業等)を選択できるようなボタン(作業種類設定手段53)を座席8近傍の運転操作部または表示パネル5に配置するのである。或いは、作業機30の種類判別手段を作業機30の連結部に設けて、作業機連結装置40に連結すると、作業機30の種類判別手段からコントローラ54にその判別信号が送信されて、最大減速割合Aが自動的に設定されるように構成する。
【0032】
また、最大減速割合設定手段73によって最大減速割合Aを設定した状態において、減速率B(負の加速度)および増速率C(加速度)を増減速率設定手段74により設定できるように構成することもできる。該増減速率設定手段74は、単位時間当り増減速量である減速率Bおよび増速率Cを設定するための手段である。該増減速率設定手段74は、回動操作することにより所定の位置に調節可能なダイヤル式のスイッチ等で構成する。但し、減速率Bと増速率Cを別々に設定することも可能であり、新たに減速率設定手段と増速率設定手段を分けて設けることも可能である。
【0033】
ここで減速率Bについて説明すると、例えば、ロータリー耕耘作業を行っている場合に、エンジン21に過負荷がかかり負荷車速制御によって減速する時に、50msecで作業走行速度3km/hから2.55km/hに減速するように設定するのである。
【0034】
この車速の減速率B(増速率C)は、経験の浅い作業者や高齢者等では設定が難しくなるので、前記最大減速割合設定手段73と同様に、作業の種類や作業機30の種類に合わせて設定するように構成することもできる。つまり、作業の種類を設定すると、または、作業機30を装着すると、自動的に減速率B(増速率C)を設定できるように構成するのである。
【0035】
例えば、ロータリー耕耘作業中に減速率Bが大きい場合、過負荷がかかって急減速し、リアカバー31に土が溜まり、その影響でリアカバー31が開く(上方に回動する)。耕深制御状態では、リアカバー31が上方へ回動するということは、深く耕耘し過ぎたと判断してロータリー耕耘機は上昇させてリアカバー31を下方へ回動するようにして設定深さとなるようにする。この上昇により負荷は軽減されるが、仕上がり表面は凹凸ができてしまう。そこで、作業選択手段を設けて、その操作によりロータリー耕耘作業を選択すると、減速率Bは小さく(増速率Cも小さく)なるように設定する。よって過負荷が生じたときに、ゆっくり減速するので、リアカバー31に土が溜まることがなく、ロータリー耕耘機は上昇されることもないので、仕上面をきれいにすることができる。
【0036】
作業機高さ検知手段63は、作業機30の高さを検知するための手段であり、リフトアーム41の基部に設け、耕深の検知はリアカバー31の回動角を検知するポテンショメータ等により構成する。詳しくは、耕耘カバー32に対するリアカバー31の回動位置の変化量に従って、耕深位置(作業位置)を算出する。つまり、図示しない耕深設定手段により設定した深さとなるように、作業機を昇降し、その高さを作業機高さ検知手段63により検知する。
【0037】
作業高さ設定手段75は、モア作業等の作業機30の高さを設定するための手段であり、運転席の近傍に設け、回動操作することにより所定の位置に調節可能なレバーやダイヤル式のスイッチ等で構成する。
【0038】
最高作業高さ設定手段76は、作業機30が最大上昇できる値を設定する手段である。作業高さ設定手段75と同様に、作業高さ設定手段75を回動操作することにより所定の位置に調節可能なダイヤル式のスイッチ等で構成する。
【0039】
昇降アクチュエータ22は、前記リフトアーム41を回動するように設置した油圧シリンダーにより、ロータリー耕耘機を昇降できるようにしている。油圧シリンダーを作動させることによりロータリー耕耘機の負荷作業機昇降制御を可能とする。
【0040】
ミッションケース10に設けた油圧式無段変速装置23は、可変容量型の油圧ポンプと固定または可変容量型の油圧モーターを備え、油圧ポンプまたは油圧モーターの斜板の角度を変速アクチュエータ24により変位させ、出力軸の回転を無段階に変速可能である。該変速アクチュエータ24はモーターまたはソレノイドまたはシリンダー等で構成してコントローラ54と接続され、負荷車速制御を可能に構成している。ただし、変速装置は油圧式無段変速装置23に限定するものではなく、無段階に変速できるものであれば油圧式無段変速装置(HMT)、プーリ式、またはトロコイド式等限定するものではない。
【0041】
コントローラ54は、モード変更手段51、制御実行順序設定手段52、エンジン回転数検知手段61、変速位置検知手段62、作業機高さ検知手段63、エンジン回転数設定手段71、変速位置設定手段72、最大減速割合設定手段73、および増減速率設定手段74、作業機高さ設定手段75および最高作業機高さ設定手段76とそれぞれ電気的に接続し、さらに、変速アクチュエータ24、昇降アクチュエータ22ともそれぞれ電気的に接続する。コントローラ54は、前記各種手段に基づき、負荷車速制御、負荷作業機昇降制御を行い、CPU(中央演算処理装置)、ROM、RAM、HDD等の記憶装置がバスで接続される。また、上記各種手段とコントローラ54とを通信線で繋ぐCAN(Controller Area Network)通信を用いても構わない。
【0042】
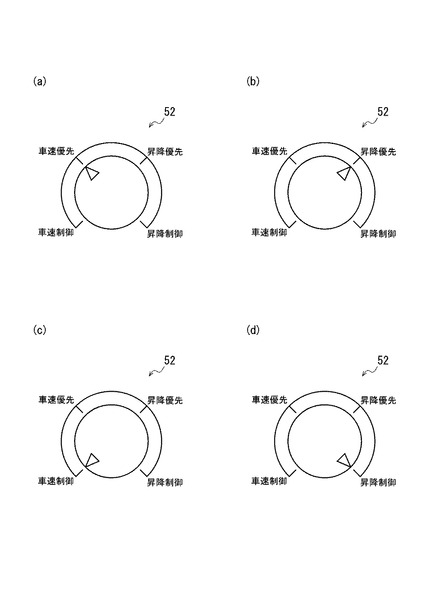
次に図6を用いて、前記制御実行順序設定手段52について詳説する。制御実行順序設定手段52は、エンジン21の過負荷を解消するための制御方法である負荷車速制御および負荷作業機昇降制御の制御実行順序(優先順位)を変更したり、負荷車速制御のみ、または負荷作業機昇降制御のみに設定したりする手段である。
【0043】
つまり、負荷車速制御を優先的に行う場合、図6の(a)のに示すように「車速優先」位置にダイヤルを設定することで、エンジン21に過負荷がかかると先ず負荷車速制御を行い、さらにエンジン21に過負荷がかかっていると負荷作業機昇降制御を行う(以下、負荷車速制御優先モードとする)。また、負荷作業機昇降制御を優先的に行う場合、図6の(b)に示すように「昇降優先」位置にダイヤルを設定することで、エンジン21に過負荷がかかると先ず負荷作業機昇降制御を行い、さらにエンジン21に過負荷がかかっていると負荷車速制御を行う(以下、負荷作業機昇降制御優先モードとする)。
【0044】
また、負荷作業機昇降制御を行わない、つまり負荷車速制御のみを行う場合は、図6の(c)のに示すように「車速制御」位置にダイヤルを設定することで、エンジン21に過負荷がかかると負荷車速制御のみを行う。負荷車速制御を行わない、つまり負荷作業機昇降制御のみを行う場合は、図6の(d)のに示すように「昇降制御」位置にダイヤルを設定することで、エンジン21に過負荷がかかると負荷車速制御のみを行う。
【0045】
次に図5を用いて、前記最大減速割合設定手段73について説明する。図5(a)は最大減速割合設定手段73と、増減速率設定手段74の実施形態を示し、ダイヤルにより構成している。このダイヤルを二つ設けることで最大減速割合設定手段73と増減速率設定手段74を別々に設定できる。ただし、切換手段を設けて、一つのダイヤルで両者を設定できるように構成することもできる。また、図5の(b)に示すように、一つのスイッチに二つのダイヤルを設けることも可能である。
【0046】
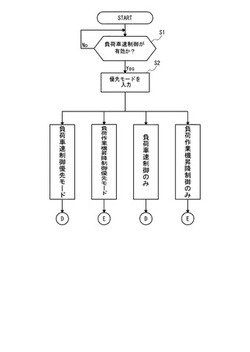
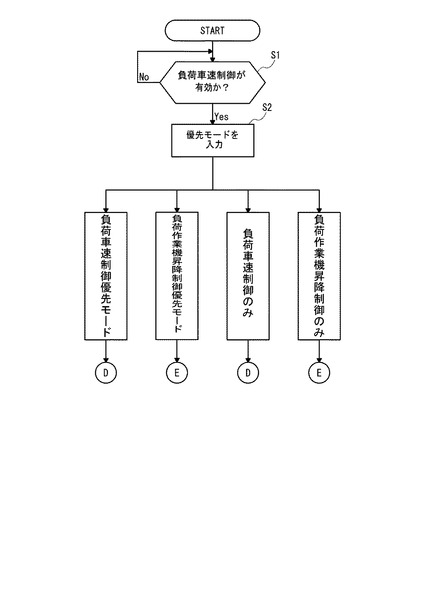
次に、本実施形態におけるエンジン負荷制御装置50による負荷車速制御および負荷作業機昇降制御の選択方法について説明する。図2に示すように、モード変更手段51によって、負荷制御の制御モードつまりエンジン負荷制御装置50が「入」であるか否かを判断する(S1)。
【0047】
ステップS1において、制御モードに入っていない、つまり、モード変更手段51が「切」であれば、そのまま負荷車速制御を行わない。この負荷車速制御が行われない時にエンジン21に過負荷がかかった場合には、オペレーター自身が主変速レバー3(副変速レバー4)やアクセルレバー、作業機高さ設定手段75等を操作し、エンジン21の過負荷を軽減することとなる。
【0048】
ステップS1において、制御モードが入った状態、つまり、モード変更手段51が「入」であれば、制御実行順序設定手段52によって設定した制御順序もしくは制御種類を読み込む(S2)。この設定によって、「負荷車速制御優先モード」、「負荷作業機昇降制御優先モード」、「負荷車速制御モード」、および「負荷作業機昇降モード」に移行する。
【0049】
前記ステップS2において、図6の(c)のように、制御実行順序設定手段52を「車速制御」に設定した場合について以下に説明する。
【0050】
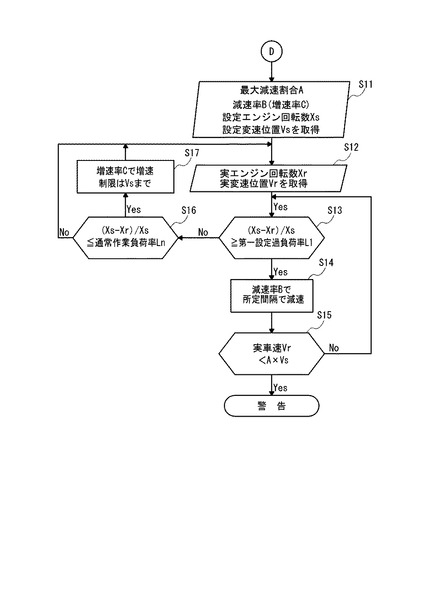
図3に示すように、コントローラ54は、最大減速割合設定手段73によって設定された最大減速割合A、増減速率設定手段74によって設定された減速率B(増速率C)、エンジン回転数設定手段71によって設定された設定エンジン回転数Xs、および変速位置設定手段72によって設定された設定変速位置Vs(設定車速)をそれぞれ取得・記憶する(S11)。
【0051】
コントローラ54は、エンジン回転数検知手段61によって通常作業中の実エンジン回転数Xrを取得し、さらに変速位置検知手段62によって通常作業中の実変速位置Vr(実車速)を取得する(S12)。
【0052】
次に、実負荷率(Xs−Xr)/Xs((設定エンジン回転数Xs−実エンジン回転数Xr)/設定エンジン回転数Xs)が第一設定過負荷率L1(例えば0.10と予め設定)以上であるか否かを判断する。つまり、エンジン21が過負荷状態であるか否かを判断する。(S13)。
【0053】
ステップS13において、エンジン21に過負荷がかかっていると判断された場合、減速率Bで予め設定された値で減速する。つまり、減速率Bで変速アクチュエータ24を作動して減速する(S14)。
【0054】
次に、実車速(実変速位置Vr)が最大減速車速A×Vs未満であるか否かを判断する(S15)。つまり、最大減速割合設定手段73により設定した最大減速できる速度まで減速したかを判断する。
【0055】
ステップS15において、実車速(実変速位置Vr)が最大減速車速A×Vs(最大減速位置)未満であると判断されると、オペレーターに実変速位置Vr(実車速)が、最大減速車速A×Vsを下回ったことを警告する。この警告よって、現在の速度では負荷がかかり過ぎているため、オペレーターは、主変速レバー3等を操作して設定速度を下げる。
【0056】
ステップS15において、実車速(実変速位置Vr)がA×Vs以上であると判断されると、再びステップS13へと戻り再度過負荷の判断を行う。
【0057】
ステップS13において、エンジン21に過負荷がかかっていないと判断された場合、負荷率(Xs−Xr)/Xsが通常作業負荷率Ln(例えば0.05と予め設定する)以下か否かを判断する(S16)。
【0058】
ステップS16において、エンジン21に対する負荷が通常の作業負荷がかかった状態であると判断すると、そのままの作業速度で作業を続け、ステップS12へと戻り、再び過負荷判断が行われる。
【0059】
ステップS16において、エンジン21に通常の作業負荷よりも軽いと判断すると、エンジン出力に余裕があるため、増速率Cで実変速位置Vrを設定変速位置Vsまでを制限として増速させ(S17)、設定速度まで戻すことができ、再びステップS12へと戻り過負荷判断が行われる。
【0060】
前記構成において、エンジン21に過負荷がかかっていると判断された場合、変速アクチュエータ24を作動して減速率Bで減速する。この減速途中で過負荷が解消されると、増速率Cで設定速度まで増速する。減速中に負荷が解消されない場合には、更に減速し、最大減速割合Aに達すると、オペレーターに、各種設定を変更したり等の警告をする。
【0061】
次に、前記ステップS2において、図6の(d)のように、制御実行順序設定手段52を負荷作業機昇降制御に設定した場合について以下に説明する。
【0062】
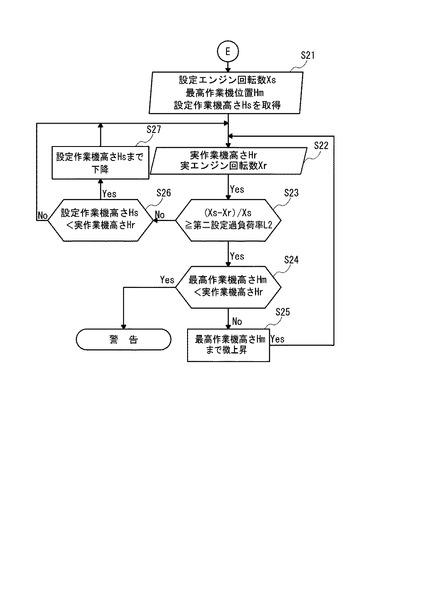
図4に示すように、コントローラ54は、作業機高さ設定手段75によって設定された設定作業機高さHs、最高作業機高さ設定手段76によって設定された最高作業機高さHm、およびエンジン回転数設定手段71によって設定された設定エンジン回転数Xsをそれぞれ取得・記憶する(S21)。
【0063】
次に、コントローラ54は、作業機高さ検知手段63によって実作業機高さHrを、エンジン回転数検知手段61によって通常作業中の実エンジン回転数Xrを取得する(S22)。
【0064】
次に、実負荷率(Xs−Xr)/Xsが、第二設定過負荷率L2(例えば予め0.10と設定)以上であるか否かを判断する。つまり、エンジン21が過負荷状態であるか否かを判断する。(S23)。
【0065】
ステップS23において、エンジン21に過負荷がかかっていると判断された場合、実作業機高さHrが最高作業機高さHmより高いか否かを判断する。つまり、作業機30が作業を行える高さ位置であるか否かの判断をする(S24)。
【0066】
ステップS24において、実作業機高さHrが最高作業機高さHmより高いと判断すると、オペレーターに作業機30が作業を行える高さ位置でないことを警告する。この警告よって、オペレーターは、ステップS21での設定の変更等を行う。
【0067】
ステップS24において、実作業機高さHrが最高作業機高さHm以下であると判断すると、作業機30が最高作業機高さHmまで微上昇する(S25)。つまり、昇降アクチュエータ22を作動することで作業機30が微上昇し、エンジン21の過負荷を回避する。そして再び、ステップS22へと戻る。
【0068】
一方、ステップS23において、エンジン21に過負荷がかかっていないと判断した場合、実作業機高さHrが設定作業機高さHsより高いか否かを判断する。つまり、作業機30が適正な作業を行える設定作業機高さHsであるか否かの判断をする(S26)。
【0069】
ステップS26において、実作業機高さHrが設定作業機高さHs以下と判断した場合、作業機30はそのままの作業高さを保持し作業を続ける。そして、再びステップS22へと戻る。
【0070】
一方、ステップS26において、実作業機高さHrが設定作業機高さHsより高いと判断した場合、作業機30は設定作業機高さHsまで降下し作業を行う(S27)。そして、再びステップS22へと戻る。
【0071】
前記構成において、エンジン21に過負荷がかかっていると判断された場合、昇降アクチュエータ22を作動することで作業機30が最高作業機高さHmまで微上昇する。また、エンジン21の過負荷の解消等により、作業機30の実作業機高さHrが最高作業機高さHmより高い位置であると、オペレーターに、各種設定の変更を行うように警告をする。エンジン21が過負荷状態でない場合で、作業機30の実作業機高さHrが設定作業機高さHsより高い位置にある場合、作業機30は設定作業機高さHsまで降下する。
【0072】
前記ステップS2において、図6の(a)のように、制御実行順序設定手段52を「車速優先」位置にダイヤルを設定した負荷車速制御優先モードの場合について以下に説明する。
【0073】
図3に示す負荷車速制御モードと、図4に示す負荷作業機昇降制御モードを参照して説明する。但し重複する箇所は説明を省略する。また、図3に示す第一設定過負荷率L1は例えば0.10、図4に示す第二設定過負荷率L2は例えば0.15と予め設定して、エンジン21の過負荷判断が行われるものとする。
【0074】
図3のステップS11およびステップS12の各設定項目および各検知項目を取得・記憶して、次に実負荷率(Xs−Xr)/Xsが第一設定過負荷率L1(例えば0.10と予め設定)以上であるか否かを判断する。つまり、エンジン21が過負荷状態であるか否かを判断する。(S13)。
【0075】
そして、エンジン21に過負荷がかかっていると判断された場合、変速アクチュエータ24を作動して減速率Bで減速する。また、この減速途中で過負荷が解消されると、増速率Cで設定車速まで増速する。ステップS15において、減速中に負荷が解消されない場合には、更に減速し、最大減速割合Aに達すると判断すると、オペレーターへの警告は行わずに、次に負荷作業機昇降制御へと移行する。
【0076】
そして、図4のステップS21およびステップS22において、各設定項目および各検知項目を取得・記憶して、次に実負荷率(Xs−Xr)/Xsが前記第一設定過負荷率L1よりも負荷が大きい第二設定過負荷率L2(例えば0.15)以上であるか否かを判断する。つまり、エンジン21が過負荷状態であるか否かを判断する。(S23)。
【0077】
そして、エンジン21に過負荷がかかっていると判断された場合、作業機30が最高作業機高さHmまで微上昇する。つまり、昇降アクチュエータ22を作動することで作業機30が微上昇する。また、エンジン21の過負荷の解消等により、作業機30の実作業機高さHrが最高作業機高さHmより高い位置であると、オペレーターに、各種設定の変更を行うように警告をする。エンジン21が過負荷状態でない場合で、作業機30の実作業機高さHrが設定作業機高Hsより高い位置にある場合、作業機30は設定作業機高さHsまで降下する。
【0078】
図4のステップS25において、作業機30が最高作業機高さHmまで微上昇して、エンジン21の過負荷を回避した後、再び、ステップS22へと戻り、設定作業機高さHsまで降下した後に、図3に示すステップS12へと戻る。
【0079】
負荷車速制御を優先するため、ステップS13において、第一設定過負荷率L1(0.10)を閾値として、エンジン21に過負荷がかかったと判断すると、図3に示す前述した負荷車速制御を行う。しかし、ステップS15において、実車速(実変速位置Vr)が最大減速車速A×Vs(最大変速位置)未満であると判断されると、次に図4に示す負荷作業機昇降制御へと移行する。
【0080】
そして、負荷作業機昇降制御のステップS23の第二設定過負荷率L2(予め0.15と設定)を閾値として、エンジン21に過負荷がかかったと判断する、負荷作業機昇降制御のステップS25に至った場合、つまり、昇降アクチュエータ22を作動することで作業機30が微上昇し、エンジン21の過負荷を回避する。
【0081】
前記ステップS2において、図6の(b)のように、制御実行順序設定手段52を「昇降優先」位置にダイヤルを設定した負荷昇降制御優先モードについて以下に説明する。
【0082】
また、前述した負荷車速制御優先モードと同様に、図4に示す負荷昇降制御モードと図3に示す負荷車速制御モードとを参照して説明する。但し重複する箇所は説明を省略する。また、図4に示す第二設定過負荷率L2は、例えば0.10、図3に示す第一設定過負荷率L1は例えば0.15と設定され、エンジン21の過負荷判断が行われるものとする。つまり、負荷昇降制御優先モードなので、負荷は、第二設定過負荷率L2よりも第一設定過負荷率L1を大きく設定している。
【0083】
そして、図4のステップS21およびステップS22において、各設定項目および各検知項目を取得・記憶して、次に実負荷率(Xs−Xr)/Xsが第二設定過負荷率L2(0.10)以上であるか否かを判断する。つまり、エンジン21が過負荷状態であるか否かを判断する。(S23)。
【0084】
そして、エンジン21に過負荷がかかっていると判断された場合、作業機30が最高作業機高さHmまで微上昇する。つまり、昇降アクチュエータ22を作動することで作業機30が微上昇する。また、エンジン21の過負荷の解消等により、作業機30の実作業機高さHmが最高作業機高さHmより高い位置であると、オペレーターに、各種設定の変更を行うように警告をする。エンジン21が過負荷状態でない場合で、作業機30の実作業機高さHrが設定作業機高Hsより高い位置にある場合、作業機30は設定作業機高さHsまで降下する。
【0085】
ただし、図4のステップS24において、実作業機高さHrが最高作業機高さHmに至ったと判断すると、オペレーターに作業機30が作業を行える高さ位置でないことを警告するのではなく、次に負荷車速制御へと移行する。
【0086】
作業機30が最高作業機高さHmまで微上昇して、エンジン21の過負荷が回避できない場合は、再び、ステップS22へと戻るのではなく、図3に示す負荷車速制御のステップS11へと移る。
【0087】
そして、ステップS11およびステップS12の各設定項目および各検知項目を取得・記憶して、次に実負荷率(Xs−Xr)/Xsが第一設定過負荷率L1(0.15と予め設定)以上であるか否かを判断する。つまり、エンジン21が過負荷状態であるか否かを判断する。(S13)。
【0088】
そして、エンジン21に過負荷がかかっていると判断された場合、減速率Bで減速し、負荷がかかり続けると最大減速割合Aまで減速する。負荷が解消すれば、設定変速位置Vs(設定車速)まで戻してから、負荷作業機昇降制御を行う。
【0089】
以上の如く、本実施形態の作業車両100のエンジン負荷制御装置50は、エンジン21と、該エンジン21の回転数を検知するエンジン回転数検知手段61と、前記エンジン21の負荷を検知する手段と、前記エンジン21からの出力を変速し駆動系に伝達する変速機(油圧式無段変速装置23)と、前記変速機を制御する手段と、作業車両100に装着する作業機30と、該作業機30を昇降する手段とを備え、過負荷となると車速を減速する負荷車速制御を行うエンジン負荷制御装置50であって、前記エンジン21の負荷率が設定値以上の過負荷となり、前記負荷車速制御を行う時に最大減速できる割合である最大減速割合Aを設定する最大減速割合設定手段73を備えるものである。このように構成することにより、作業にあった負荷車速制御を行うことが可能となる。
【0090】
本実施形態の作業車両100のエンジン負荷制御装置50は、前記負荷車速制御に伴う減速をする時の単位時間あたりの増減速量である減速率B(増速率C)を設定する増減速率設定手段74を備えるものである。このように構成することにより、オペレーターが減速率を変更することができるので、作業種類にあった負荷車速制御を行うことが可能となる。
【0091】
本実施形態の作業車両100のエンジン負荷制御装置50は、前記負荷車速制御に伴い最大減速した後にエンジン21の過負荷が軽減されないとき、作業機を設定量上昇させるように制御する負荷作業機昇降制御を備えるものである。このように構成することにより、負荷車速制御だけでなく作業機30を設定上昇させる制御を行うことで、負荷車速制御が多種多様になり、オペレーターの選択肢が広がる。設定値によって、オペレーターの意図で作業仕上げを優先するか、作業時間を優先するかを選択することができる。前記負荷車速制御による車速の減速割合Aおよび減速率B・増速率Cを変更することにより、効率の良いエンジン負荷制御を行うことが可能となる。
【0092】
本実施形態の作業車両のエンジン負荷制御装置50は、前記負荷車速制御と、前記負荷作業機昇降制御との、制御優先順位を設定する制御実行順序設定手段52を備えるものである。このように構成することにより、負荷車速制御が多種多様になり、オペレーターの選択肢が広がる。設定および設定値によって、オペレーターの意図で作業仕上げを優先するか、作業時間を優先するかを選択することが可能となる。
【0093】
本実施形態の作業車両のエンジン負荷制御装置50は、前記負荷車速制御に伴う最大減速割合Aを、作業の種類ごとに設定する作業種類設定手段53を備えるものである。このように構成することにより、作業種類設定手段53を備えることで、経験の浅い作業者や高齢者等でも作業種類にあった負荷車速制御が自動的にできる。
【符号の説明】
【0094】
21 エンジン
30 作業機
50 エンジン負荷制御装置
52 制御実行順序設定手段
53 作業種類設定手段
61 エンジン回転数検知手段
72 変速位置設定手段
73 最大減速割合設定手段
74 増減速率設定手段
100 作業車両
A 最大減速割合
B 減速率
C 増速率
【技術分野】
【0001】
本発明は、トラクタ等の作業車両において、エンジンに負荷がかかった時の負荷車速制御と、「負荷作業機昇降制御」の技術に関する。
【背景技術】
【0002】
従来、トラクタ等の作業車両は、車体後部に作業機を連結して、圃場を走行しながら作業を行う。作業車両に搭載したエンジンの駆動力は、油圧式変速手段により変速し走行部へ伝達する。また、PTO変速手段により変速された後PTO軸を介して作業機へと伝達される。圃場の硬軟や作業深さや傾斜等の状態による様々な条件により、作業機に対する負荷状態が変動することで、エンジンに過負荷がかかり、回転数が減少し、延いてはエンジンが停止することもあった。
【0003】
この問題を解消するために、例えば特許文献1に示すように、走行機体(作業車両)に負荷車速制御手段を設けて、エンジンの過負荷時に、負荷が所定値以上になると、走行機体の車速を所定比率(減速割合、例えば速度の70%)または所定量減速(例えば、3km/hから2km/h、または、3速から2速)するように制御することが開示されている。
【0004】
しかし、トラクタ等の作業車両において、減速割合が固定されていると(例えば速度の50%、最大4km/hから2km/hまで)、ロータリー耕耘装置による作業の場合に最大減速すると、耕耘ピッチが急に変化し、減速時に多量の土がリアカバー側に回り込むこととなり減速位置から仕上がりが異なる。一方、過負荷がかかると作業機を上昇させる制御であれば、モアによる芝刈り作業では、過負荷がかかると刈り高さが高くなり仕上がりが異なることになるが、過負荷がかかると所定量減速する制御では、過負荷がかかったときに最大減速しても作業機の高さは変化しないので仕上がりに大きな影響はない。このように、過負荷時に最大減速割合が固定である負荷制御や作業機を上昇させる制御では、作業の形態によって仕上がりが異なることが生じる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平10−339181号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、以上の如き状況を鑑みてなされたものであり、作業時に過負荷がかかった場合において、作業形態に応じて減速割合を変更可能とし、負荷制御のモードを切換可能な作業車両のエンジン負荷制御装置を提供することを課題とする。
【課題を解決するための手段】
【0007】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0008】
請求項1においては、エンジン(21)と、該エンジン(21)の検知する手段(61)と、前記エンジンの負荷を検知する手段と、前記エンジン(21)からの出力を変速し、駆動系に伝達する変速機(23)と、該変速機(23)を制御する手段と、作業車両(100)に装着する作業機(30)と、該作業機(30)を昇降する手段(22)とを備え、該エンジン(21)が過負荷状態になると車速を減速する負荷車速制御,作業機を昇降する負荷作業機昇降制御を行う、エンジン負荷制御装置(50)を具備し、該エンジン負荷制御装置(50)は、エンジン回転数を設定エンジン回転数(Xs)に保つように、該エンジン(21)が過負荷となった時の負荷に応じて、車速を増減し、又は作業機(30)を昇降する構成とし、前記負荷車速制御と、前記負荷作業機昇降制御との、制御優先順位を設定する制御実行順序設定手段(52)を備えるものである。
【0009】
請求項2においては、請求項1記載の作業車両のエンジン負荷制御装置において、該制御実行順序設定手段(52)は、「負荷車速制御優先モード」と、「負荷作業機昇降制御優先モード」と、「負荷車速制御モード」と、「負荷作業機昇降モード」を選択設定し、「負荷車速制御優先モード」は、エンジン(21)に過負荷がかかると先ず負荷車速制御を行い、さらにエンジン21に過負荷がかかっていると負荷作業機昇降制御を行い、「負荷作業機昇降制御優先モード」は、エンジン(21)に過負荷がかかると先ず負荷作業機昇降制御を行い、さらにエンジン21に過負荷がかかっていると負荷車速制御を行い、「負荷車速制御モード」は、エンジン(21)に過負荷がかかると負荷車速制御のみを行い、「負荷作業機昇降モード」は、エンジン(21)に過負荷がかかると負荷車速制御のみを行うものである。
【発明の効果】
【0010】
本発明の効果として、以下に示すような効果を奏する。
【0011】
請求項1においては、エンジン(21)と、該エンジン(21)の検知する手段(61)と、前記エンジンの負荷を検知する手段と、前記エンジン(21)からの出力を変速し、駆動系に伝達する変速機(23)と、該変速機(23)を制御する手段と、作業車両(100)に装着する作業機(30)と、該作業機(30)を昇降する手段(22)とを備え、該エンジン(21)が過負荷状態になると車速を減速する負荷車速制御,作業機を昇降する負荷作業機昇降制御を行う、エンジン負荷制御装置(50)を具備し、該エンジン負荷制御装置(50)は、エンジン回転数を設定エンジン回転数(Xs)に保つように、該エンジン(21)が過負荷となった時の負荷に応じて、車速を増減し、又は作業機(30)を昇降する構成とし、前記負荷車速制御と、前記負荷作業機昇降制御との、制御優先順位を設定する制御実行順序設定手段(52)を備えるので、負荷車速制御だけでなく作業機を設定上昇させる制御を行うことで、負荷車速制御が多種多様になり、オペレーターの選択肢が広がる。設定値によって、オペレーターの意図で作業仕上げを優先するか、作業時間を優先するかを選択することができる。
【0012】
請求項2においては、請求項1記載の作業車両のエンジン負荷制御装置において、該制御実行順序設定手段(52)は、「負荷車速制御優先モード」と、「負荷作業機昇降制御優先モード」と、「負荷車速制御モード」と、「負荷作業機昇降モード」を選択設定し、「負荷車速制御優先モード」は、エンジン(21)に過負荷がかかると先ず負荷車速制御を行い、さらにエンジン21に過負荷がかかっていると負荷作業機昇降制御を行い、「負荷作業機昇降制御優先モード」は、エンジン(21)に過負荷がかかると先ず負荷作業機昇降制御を行い、さらにエンジン21に過負荷がかかっていると負荷車速制御を行い、「負荷車速制御モード」は、エンジン(21)に過負荷がかかると負荷車速制御のみを行い、「負荷作業機昇降モード」は、エンジン(21)に過負荷がかかると負荷車速制御のみを行うので、負荷車速制御が多種多様になり、オペレーターの選択肢が広がる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施形態にかかる制御ブロック回路を示した図。
【図2】エンジン負荷制御装置のフローチャートを示した図。
【図3】同じく負荷車速制御のみのフローチャートを示した図。
【図4】同じく負荷作業機昇降制御のみのフローチャートを示した図。
【図5】最大減速割合設定手段または増減速率設定手段を示した図。
【図6】制御優先順序設定手段を示した図。
【図7】本発明の実施形態にかかる作業車両を示した側面図。
【発明を実施するための形態】
【0014】
次に、本発明の実施形態にかかる作業車両100はトラクタとし、該トラクタに連結する作業機30をロータリー耕耘機として、その全体構成について、図7を用いて説明する。作業車両100は、機体の両側前部に支承される前輪1・1と、機体の両側後部に支承される後輪2・2とを備える。さらに、機体前部のボンネット6内部には、原動機となるエンジン21を配置し、ボンネット6の後方にはキャビン9を配置している。キャビン9内の前部には、操向ハンドル7を設け、操向ハンドル7の前方には表示パネル5を配置し、操向ハンドル7の後方には座席8を配置している。また、座席8の側部には主変速レバー3、副変速レバー4、耕深設定手段(作業高さ設定手段75)となる耕深設定ダイヤル等が配置され、操向ハンドル7のハンドルコラム側部に前後進切換レバーが配置されている。そして、前記座席8前下方のステップ上にはブレーキペダルや主クラッチペダルやデフロックペダル等が配設されている。
【0015】
また、図7に示すように、エンジン21の後部には伝動ハウジングを配置し、該伝動ハウジング後部には、油圧式無段変速装置23を収納したミッションケース10を配置し、エンジン21からの動力を変速した後に後輪2・2に伝達して駆動し、四輪駆動切換機構を介して前輪1・1にも同時に駆動力を伝達することを可能としている。
【0016】
作業機連結装置40は、主としてトップリンク42、ロアリンク43・43、リフトロッド44・44を備える。トップリンク42は、ミッションケース10の後部に固設したトップリンクブラケット(図示省略)に回動自在に連結する。ロアリンク43・43は、ミッションケース10またはリヤアクスルハウジングの両側に回動自在に連結する。リフトロッド44・44は、一端をロアリンク43・43の前後中途部に回動自在に連結し、他端を前記油圧ケース11より後方に突出したリフトアーム41・41に回動自在に連結する。トップリンク42およびロアリンク43・43の後端には、作業機30であるロータリー耕耘機を連結する。
【0017】
前記リフトアーム41・41は、油圧シリンダーの伸縮により回動され、該油圧シリンダーは電磁バルブ等の昇降アクチュエータ22(図7中図示省略)を切換ることにより圧油の送油方向が切換られて伸縮し、該昇降アクチュエータ22は図1に示すようにコントローラ54と接続されて、ロータリー耕耘機を負荷作業機昇降制御可能としている。また、リフトアーム41・41の回動基部には作業機高さ検知手段63が配置され、該作業機高さ検知手段63はコントローラ54と接続されて、作業機の高さを検知して昇降高さを制御(昇降制御)可能としている。
【0018】
ロータリー耕耘機(作業機30)は、主に耕耘軸、耕耘爪33、耕耘カバー32、リアカバー31等を備える。耕耘爪33・33・・・は左右方向に回転自在に横架した耕耘軸上に適宜間隔をあけて放射状に植設され、該耕耘爪33・33・・・の先端の回転軌跡の上方及び側方を覆うように耕耘カバー32が配置され、該耕耘カバー32の後端にはリアカバー31の前端が回動自在に連結される。前記耕耘軸はチェーンケース34、ギヤケース、ユニバーサルジョイント等を介して、前記ミッションケース10の後面より後方に突出したPTО軸と連動連結されて、エンジン21からの動力を耕耘爪33に伝達して回転駆動可能としている。
【0019】
さらに、本発明の実施形態にかかるエンジン負荷制御装置50について、図1および図7を用いて説明する。エンジン負荷制御装置50は、エンジン回転数を設定エンジン回転数Xsに保つように、エンジン21が過負荷となった時の負荷に応じて車速を増減する負荷車速制御と、作業機30を昇降する負荷作業機昇降制御とを行う。エンジン負荷制御装置50は、主としてモード変更手段51、制御実行順序設定手段52、作業種類設定手段53、エンジン回転数検知手段61、変速位置検知手段62、作業機高さ検知手段63、エンジン回転数設定手段71、変速位置設定手段72、最大減速割合設定手段73、増減速率設定手段74、作業機高さ設定手段75、最高作業機高さ設定手段76、およびコントローラ54を備える。
【0020】
本実施形態のエンジン21が、過負荷状態か否かを判断する閾値である負荷率は、エンジン回転数設定手段71で設定した設定エンジン回転数Xsと、エンジン回転数検知手段61で検知した実際のエンジン回転数Xr(以下、実エンジン回転数Xrとする)よりマップ等を用いて算出される。但し、実エンジン回転数Xrと燃料噴射量より算出することも可能であり、その負荷の算出方法は限定するものではない。また、実負荷率((設定エンジン回転数Xs−実エンジン回転数Xr)/設定エンジン回転数Xs)が、例えば予め設定された負荷率である第一設定過負荷率L1が、本実施例では0.10以上となると過負荷がかかったとして説明する。また、第一設定過負荷率L1(第二設定過負荷率L2)は任意に設定可能とする。
【0021】
以下に前記各手段について各々説明する。
【0022】
モード変更手段51は、負荷車速制御自体を行うか否かの設定を行う手段であり、押下することで「ON」と「OFF」が切り替わるボタン式のスイッチにより構成する。
【0023】
制御実行順序設定手段52は、負荷車速制御および負荷作業機昇降制御のどちらか一方を優先的に行うよう設定する設定手段である。また、負荷車速制御のみ、または作業機負荷作業機昇降制御のみを制御するように設定とすることも可能である。制御実行順序設定手段52は、回動操作することにより調節可能なダイヤル式のスイッチ等で構成する。詳細については後述する。
【0024】
エンジン回転数検知手段61は、実エンジン回転数Xrを検知するための手段であり、磁気ピックアップ式のセンサーや、ロータリエンコーダ等を用いて、エンジン21近傍のフライホイールまたはクランク軸(図示省略)の回転数を検知するものである。
【0025】
エンジン回転数設定手段71は、アクセルレバーまたはアクセルペダル等を操作してエンジン回転数を設定するものであり、その設定値はアクセルレバーまたはアクセルペダルの回動基部に配置した角度検知手段により検知し、設定エンジン回転数Xsとしてコントローラ54に入力する構成としている。
【0026】
変速位置検知手段62は、油圧式無段変速装置23の負荷車速制御を司る、油圧ポンプまたは油圧モーターの斜板角度の変速位置(以下、実変速位置Vrとする)を検知するセンサー等で構成する。この変速はモーターやシリンダー等で構成した変速アクチュエータ24により行う。また、作業車両100の実際の車速(走行速度)を検知するための手段であり、検出値を基に後述するコントローラ54にて車速を算出する。但し、変速位置は変速アームの角度を検出したりすることも可能であり、変速位置検知構成は限定しない。
【0027】
変速位置設定手段72は、変速アクチュエータ24の変位位置(設定変速位置Vsとする)を設定する手段であって、主変速レバー3等により構成される。つまり、変速位置設定手段72によって、車速が設定され、該変速位置設定手段72の操作位置がセンサーにより検知されコントローラ54に入力される。
【0028】
最大減速割合設定手段73は、エンジン21に過負荷がかかった場合に、設定変速位置Vsから最大減速できる割合(以下、最大減速割合Aとする)を設定する手段である。つまり、エンジン21が過負荷となった場合に、設定変速位置Vs(設定車速)に対して最大減速できる割合まで減速させることで、走行部である後輪2や作業機30等の駆動系のトルクを増大させて、エンジン21の過負荷を回避する。最大減速割合設定手段73は、作業、または、装着した作業機30の種類に合わせて設定できるようにしている。この作業、または、装着した作業機30の種類は、回動操作することにより所定の位置に調節可能なダイヤル式のスイッチ(図5の(a)参照)等で構成する。
【0029】
ここで、前記最大減速割合Aについて説明する。最大減速割合Aとは、エンジン21に過負荷がかかる前の変速レバー等で設定した設定変速位置Vs(設定車速)を100%とした場合、どの程度(変速位置)まで最大減速できるかの割合であり、最大減速割合設定手段73により設定する。例えば、最大減速割合Aを85%に設定した場合、作業車両100の設定車速(設定変速位置Vs)を3km/hに設定し作業を行っている時に、エンジン21に過負荷がかかると、その負荷に応じて負荷車速制御により95%、90%と減速してエンジン21の過負荷を解消しようとするが、最大減速できる車速は、3km/h×0.85=2.55km/hまで減速できるものとする。
【0030】
この最大減速割合Aは、オペレーターの操作により任意に設定することも可能であるが、経験の浅いオペレーターや高齢者等では設定が難しくなるので、作業の種類や作業機の種類に合わせて設定するように構成することもできる。
【0031】
つまり、ロータリー耕耘作業を行う場合、または、ロータリー耕耘機を装着している場合には、最大減速割合設定手段73を85%に自動的に設定し、芝刈り作業を行う場合、または、モアを装着した場合には最大減速割合設定手段73を50%に自動的に設定されるようにするのである。具体的には、最大減速割合設定手段73には作業の種類(耕耘作業や芝刈り作業やトレンチャ作業等)を選択できるようなボタン(作業種類設定手段53)を座席8近傍の運転操作部または表示パネル5に配置するのである。或いは、作業機30の種類判別手段を作業機30の連結部に設けて、作業機連結装置40に連結すると、作業機30の種類判別手段からコントローラ54にその判別信号が送信されて、最大減速割合Aが自動的に設定されるように構成する。
【0032】
また、最大減速割合設定手段73によって最大減速割合Aを設定した状態において、減速率B(負の加速度)および増速率C(加速度)を増減速率設定手段74により設定できるように構成することもできる。該増減速率設定手段74は、単位時間当り増減速量である減速率Bおよび増速率Cを設定するための手段である。該増減速率設定手段74は、回動操作することにより所定の位置に調節可能なダイヤル式のスイッチ等で構成する。但し、減速率Bと増速率Cを別々に設定することも可能であり、新たに減速率設定手段と増速率設定手段を分けて設けることも可能である。
【0033】
ここで減速率Bについて説明すると、例えば、ロータリー耕耘作業を行っている場合に、エンジン21に過負荷がかかり負荷車速制御によって減速する時に、50msecで作業走行速度3km/hから2.55km/hに減速するように設定するのである。
【0034】
この車速の減速率B(増速率C)は、経験の浅い作業者や高齢者等では設定が難しくなるので、前記最大減速割合設定手段73と同様に、作業の種類や作業機30の種類に合わせて設定するように構成することもできる。つまり、作業の種類を設定すると、または、作業機30を装着すると、自動的に減速率B(増速率C)を設定できるように構成するのである。
【0035】
例えば、ロータリー耕耘作業中に減速率Bが大きい場合、過負荷がかかって急減速し、リアカバー31に土が溜まり、その影響でリアカバー31が開く(上方に回動する)。耕深制御状態では、リアカバー31が上方へ回動するということは、深く耕耘し過ぎたと判断してロータリー耕耘機は上昇させてリアカバー31を下方へ回動するようにして設定深さとなるようにする。この上昇により負荷は軽減されるが、仕上がり表面は凹凸ができてしまう。そこで、作業選択手段を設けて、その操作によりロータリー耕耘作業を選択すると、減速率Bは小さく(増速率Cも小さく)なるように設定する。よって過負荷が生じたときに、ゆっくり減速するので、リアカバー31に土が溜まることがなく、ロータリー耕耘機は上昇されることもないので、仕上面をきれいにすることができる。
【0036】
作業機高さ検知手段63は、作業機30の高さを検知するための手段であり、リフトアーム41の基部に設け、耕深の検知はリアカバー31の回動角を検知するポテンショメータ等により構成する。詳しくは、耕耘カバー32に対するリアカバー31の回動位置の変化量に従って、耕深位置(作業位置)を算出する。つまり、図示しない耕深設定手段により設定した深さとなるように、作業機を昇降し、その高さを作業機高さ検知手段63により検知する。
【0037】
作業高さ設定手段75は、モア作業等の作業機30の高さを設定するための手段であり、運転席の近傍に設け、回動操作することにより所定の位置に調節可能なレバーやダイヤル式のスイッチ等で構成する。
【0038】
最高作業高さ設定手段76は、作業機30が最大上昇できる値を設定する手段である。作業高さ設定手段75と同様に、作業高さ設定手段75を回動操作することにより所定の位置に調節可能なダイヤル式のスイッチ等で構成する。
【0039】
昇降アクチュエータ22は、前記リフトアーム41を回動するように設置した油圧シリンダーにより、ロータリー耕耘機を昇降できるようにしている。油圧シリンダーを作動させることによりロータリー耕耘機の負荷作業機昇降制御を可能とする。
【0040】
ミッションケース10に設けた油圧式無段変速装置23は、可変容量型の油圧ポンプと固定または可変容量型の油圧モーターを備え、油圧ポンプまたは油圧モーターの斜板の角度を変速アクチュエータ24により変位させ、出力軸の回転を無段階に変速可能である。該変速アクチュエータ24はモーターまたはソレノイドまたはシリンダー等で構成してコントローラ54と接続され、負荷車速制御を可能に構成している。ただし、変速装置は油圧式無段変速装置23に限定するものではなく、無段階に変速できるものであれば油圧式無段変速装置(HMT)、プーリ式、またはトロコイド式等限定するものではない。
【0041】
コントローラ54は、モード変更手段51、制御実行順序設定手段52、エンジン回転数検知手段61、変速位置検知手段62、作業機高さ検知手段63、エンジン回転数設定手段71、変速位置設定手段72、最大減速割合設定手段73、および増減速率設定手段74、作業機高さ設定手段75および最高作業機高さ設定手段76とそれぞれ電気的に接続し、さらに、変速アクチュエータ24、昇降アクチュエータ22ともそれぞれ電気的に接続する。コントローラ54は、前記各種手段に基づき、負荷車速制御、負荷作業機昇降制御を行い、CPU(中央演算処理装置)、ROM、RAM、HDD等の記憶装置がバスで接続される。また、上記各種手段とコントローラ54とを通信線で繋ぐCAN(Controller Area Network)通信を用いても構わない。
【0042】
次に図6を用いて、前記制御実行順序設定手段52について詳説する。制御実行順序設定手段52は、エンジン21の過負荷を解消するための制御方法である負荷車速制御および負荷作業機昇降制御の制御実行順序(優先順位)を変更したり、負荷車速制御のみ、または負荷作業機昇降制御のみに設定したりする手段である。
【0043】
つまり、負荷車速制御を優先的に行う場合、図6の(a)のに示すように「車速優先」位置にダイヤルを設定することで、エンジン21に過負荷がかかると先ず負荷車速制御を行い、さらにエンジン21に過負荷がかかっていると負荷作業機昇降制御を行う(以下、負荷車速制御優先モードとする)。また、負荷作業機昇降制御を優先的に行う場合、図6の(b)に示すように「昇降優先」位置にダイヤルを設定することで、エンジン21に過負荷がかかると先ず負荷作業機昇降制御を行い、さらにエンジン21に過負荷がかかっていると負荷車速制御を行う(以下、負荷作業機昇降制御優先モードとする)。
【0044】
また、負荷作業機昇降制御を行わない、つまり負荷車速制御のみを行う場合は、図6の(c)のに示すように「車速制御」位置にダイヤルを設定することで、エンジン21に過負荷がかかると負荷車速制御のみを行う。負荷車速制御を行わない、つまり負荷作業機昇降制御のみを行う場合は、図6の(d)のに示すように「昇降制御」位置にダイヤルを設定することで、エンジン21に過負荷がかかると負荷車速制御のみを行う。
【0045】
次に図5を用いて、前記最大減速割合設定手段73について説明する。図5(a)は最大減速割合設定手段73と、増減速率設定手段74の実施形態を示し、ダイヤルにより構成している。このダイヤルを二つ設けることで最大減速割合設定手段73と増減速率設定手段74を別々に設定できる。ただし、切換手段を設けて、一つのダイヤルで両者を設定できるように構成することもできる。また、図5の(b)に示すように、一つのスイッチに二つのダイヤルを設けることも可能である。
【0046】
次に、本実施形態におけるエンジン負荷制御装置50による負荷車速制御および負荷作業機昇降制御の選択方法について説明する。図2に示すように、モード変更手段51によって、負荷制御の制御モードつまりエンジン負荷制御装置50が「入」であるか否かを判断する(S1)。
【0047】
ステップS1において、制御モードに入っていない、つまり、モード変更手段51が「切」であれば、そのまま負荷車速制御を行わない。この負荷車速制御が行われない時にエンジン21に過負荷がかかった場合には、オペレーター自身が主変速レバー3(副変速レバー4)やアクセルレバー、作業機高さ設定手段75等を操作し、エンジン21の過負荷を軽減することとなる。
【0048】
ステップS1において、制御モードが入った状態、つまり、モード変更手段51が「入」であれば、制御実行順序設定手段52によって設定した制御順序もしくは制御種類を読み込む(S2)。この設定によって、「負荷車速制御優先モード」、「負荷作業機昇降制御優先モード」、「負荷車速制御モード」、および「負荷作業機昇降モード」に移行する。
【0049】
前記ステップS2において、図6の(c)のように、制御実行順序設定手段52を「車速制御」に設定した場合について以下に説明する。
【0050】
図3に示すように、コントローラ54は、最大減速割合設定手段73によって設定された最大減速割合A、増減速率設定手段74によって設定された減速率B(増速率C)、エンジン回転数設定手段71によって設定された設定エンジン回転数Xs、および変速位置設定手段72によって設定された設定変速位置Vs(設定車速)をそれぞれ取得・記憶する(S11)。
【0051】
コントローラ54は、エンジン回転数検知手段61によって通常作業中の実エンジン回転数Xrを取得し、さらに変速位置検知手段62によって通常作業中の実変速位置Vr(実車速)を取得する(S12)。
【0052】
次に、実負荷率(Xs−Xr)/Xs((設定エンジン回転数Xs−実エンジン回転数Xr)/設定エンジン回転数Xs)が第一設定過負荷率L1(例えば0.10と予め設定)以上であるか否かを判断する。つまり、エンジン21が過負荷状態であるか否かを判断する。(S13)。
【0053】
ステップS13において、エンジン21に過負荷がかかっていると判断された場合、減速率Bで予め設定された値で減速する。つまり、減速率Bで変速アクチュエータ24を作動して減速する(S14)。
【0054】
次に、実車速(実変速位置Vr)が最大減速車速A×Vs未満であるか否かを判断する(S15)。つまり、最大減速割合設定手段73により設定した最大減速できる速度まで減速したかを判断する。
【0055】
ステップS15において、実車速(実変速位置Vr)が最大減速車速A×Vs(最大減速位置)未満であると判断されると、オペレーターに実変速位置Vr(実車速)が、最大減速車速A×Vsを下回ったことを警告する。この警告よって、現在の速度では負荷がかかり過ぎているため、オペレーターは、主変速レバー3等を操作して設定速度を下げる。
【0056】
ステップS15において、実車速(実変速位置Vr)がA×Vs以上であると判断されると、再びステップS13へと戻り再度過負荷の判断を行う。
【0057】
ステップS13において、エンジン21に過負荷がかかっていないと判断された場合、負荷率(Xs−Xr)/Xsが通常作業負荷率Ln(例えば0.05と予め設定する)以下か否かを判断する(S16)。
【0058】
ステップS16において、エンジン21に対する負荷が通常の作業負荷がかかった状態であると判断すると、そのままの作業速度で作業を続け、ステップS12へと戻り、再び過負荷判断が行われる。
【0059】
ステップS16において、エンジン21に通常の作業負荷よりも軽いと判断すると、エンジン出力に余裕があるため、増速率Cで実変速位置Vrを設定変速位置Vsまでを制限として増速させ(S17)、設定速度まで戻すことができ、再びステップS12へと戻り過負荷判断が行われる。
【0060】
前記構成において、エンジン21に過負荷がかかっていると判断された場合、変速アクチュエータ24を作動して減速率Bで減速する。この減速途中で過負荷が解消されると、増速率Cで設定速度まで増速する。減速中に負荷が解消されない場合には、更に減速し、最大減速割合Aに達すると、オペレーターに、各種設定を変更したり等の警告をする。
【0061】
次に、前記ステップS2において、図6の(d)のように、制御実行順序設定手段52を負荷作業機昇降制御に設定した場合について以下に説明する。
【0062】
図4に示すように、コントローラ54は、作業機高さ設定手段75によって設定された設定作業機高さHs、最高作業機高さ設定手段76によって設定された最高作業機高さHm、およびエンジン回転数設定手段71によって設定された設定エンジン回転数Xsをそれぞれ取得・記憶する(S21)。
【0063】
次に、コントローラ54は、作業機高さ検知手段63によって実作業機高さHrを、エンジン回転数検知手段61によって通常作業中の実エンジン回転数Xrを取得する(S22)。
【0064】
次に、実負荷率(Xs−Xr)/Xsが、第二設定過負荷率L2(例えば予め0.10と設定)以上であるか否かを判断する。つまり、エンジン21が過負荷状態であるか否かを判断する。(S23)。
【0065】
ステップS23において、エンジン21に過負荷がかかっていると判断された場合、実作業機高さHrが最高作業機高さHmより高いか否かを判断する。つまり、作業機30が作業を行える高さ位置であるか否かの判断をする(S24)。
【0066】
ステップS24において、実作業機高さHrが最高作業機高さHmより高いと判断すると、オペレーターに作業機30が作業を行える高さ位置でないことを警告する。この警告よって、オペレーターは、ステップS21での設定の変更等を行う。
【0067】
ステップS24において、実作業機高さHrが最高作業機高さHm以下であると判断すると、作業機30が最高作業機高さHmまで微上昇する(S25)。つまり、昇降アクチュエータ22を作動することで作業機30が微上昇し、エンジン21の過負荷を回避する。そして再び、ステップS22へと戻る。
【0068】
一方、ステップS23において、エンジン21に過負荷がかかっていないと判断した場合、実作業機高さHrが設定作業機高さHsより高いか否かを判断する。つまり、作業機30が適正な作業を行える設定作業機高さHsであるか否かの判断をする(S26)。
【0069】
ステップS26において、実作業機高さHrが設定作業機高さHs以下と判断した場合、作業機30はそのままの作業高さを保持し作業を続ける。そして、再びステップS22へと戻る。
【0070】
一方、ステップS26において、実作業機高さHrが設定作業機高さHsより高いと判断した場合、作業機30は設定作業機高さHsまで降下し作業を行う(S27)。そして、再びステップS22へと戻る。
【0071】
前記構成において、エンジン21に過負荷がかかっていると判断された場合、昇降アクチュエータ22を作動することで作業機30が最高作業機高さHmまで微上昇する。また、エンジン21の過負荷の解消等により、作業機30の実作業機高さHrが最高作業機高さHmより高い位置であると、オペレーターに、各種設定の変更を行うように警告をする。エンジン21が過負荷状態でない場合で、作業機30の実作業機高さHrが設定作業機高さHsより高い位置にある場合、作業機30は設定作業機高さHsまで降下する。
【0072】
前記ステップS2において、図6の(a)のように、制御実行順序設定手段52を「車速優先」位置にダイヤルを設定した負荷車速制御優先モードの場合について以下に説明する。
【0073】
図3に示す負荷車速制御モードと、図4に示す負荷作業機昇降制御モードを参照して説明する。但し重複する箇所は説明を省略する。また、図3に示す第一設定過負荷率L1は例えば0.10、図4に示す第二設定過負荷率L2は例えば0.15と予め設定して、エンジン21の過負荷判断が行われるものとする。
【0074】
図3のステップS11およびステップS12の各設定項目および各検知項目を取得・記憶して、次に実負荷率(Xs−Xr)/Xsが第一設定過負荷率L1(例えば0.10と予め設定)以上であるか否かを判断する。つまり、エンジン21が過負荷状態であるか否かを判断する。(S13)。
【0075】
そして、エンジン21に過負荷がかかっていると判断された場合、変速アクチュエータ24を作動して減速率Bで減速する。また、この減速途中で過負荷が解消されると、増速率Cで設定車速まで増速する。ステップS15において、減速中に負荷が解消されない場合には、更に減速し、最大減速割合Aに達すると判断すると、オペレーターへの警告は行わずに、次に負荷作業機昇降制御へと移行する。
【0076】
そして、図4のステップS21およびステップS22において、各設定項目および各検知項目を取得・記憶して、次に実負荷率(Xs−Xr)/Xsが前記第一設定過負荷率L1よりも負荷が大きい第二設定過負荷率L2(例えば0.15)以上であるか否かを判断する。つまり、エンジン21が過負荷状態であるか否かを判断する。(S23)。
【0077】
そして、エンジン21に過負荷がかかっていると判断された場合、作業機30が最高作業機高さHmまで微上昇する。つまり、昇降アクチュエータ22を作動することで作業機30が微上昇する。また、エンジン21の過負荷の解消等により、作業機30の実作業機高さHrが最高作業機高さHmより高い位置であると、オペレーターに、各種設定の変更を行うように警告をする。エンジン21が過負荷状態でない場合で、作業機30の実作業機高さHrが設定作業機高Hsより高い位置にある場合、作業機30は設定作業機高さHsまで降下する。
【0078】
図4のステップS25において、作業機30が最高作業機高さHmまで微上昇して、エンジン21の過負荷を回避した後、再び、ステップS22へと戻り、設定作業機高さHsまで降下した後に、図3に示すステップS12へと戻る。
【0079】
負荷車速制御を優先するため、ステップS13において、第一設定過負荷率L1(0.10)を閾値として、エンジン21に過負荷がかかったと判断すると、図3に示す前述した負荷車速制御を行う。しかし、ステップS15において、実車速(実変速位置Vr)が最大減速車速A×Vs(最大変速位置)未満であると判断されると、次に図4に示す負荷作業機昇降制御へと移行する。
【0080】
そして、負荷作業機昇降制御のステップS23の第二設定過負荷率L2(予め0.15と設定)を閾値として、エンジン21に過負荷がかかったと判断する、負荷作業機昇降制御のステップS25に至った場合、つまり、昇降アクチュエータ22を作動することで作業機30が微上昇し、エンジン21の過負荷を回避する。
【0081】
前記ステップS2において、図6の(b)のように、制御実行順序設定手段52を「昇降優先」位置にダイヤルを設定した負荷昇降制御優先モードについて以下に説明する。
【0082】
また、前述した負荷車速制御優先モードと同様に、図4に示す負荷昇降制御モードと図3に示す負荷車速制御モードとを参照して説明する。但し重複する箇所は説明を省略する。また、図4に示す第二設定過負荷率L2は、例えば0.10、図3に示す第一設定過負荷率L1は例えば0.15と設定され、エンジン21の過負荷判断が行われるものとする。つまり、負荷昇降制御優先モードなので、負荷は、第二設定過負荷率L2よりも第一設定過負荷率L1を大きく設定している。
【0083】
そして、図4のステップS21およびステップS22において、各設定項目および各検知項目を取得・記憶して、次に実負荷率(Xs−Xr)/Xsが第二設定過負荷率L2(0.10)以上であるか否かを判断する。つまり、エンジン21が過負荷状態であるか否かを判断する。(S23)。
【0084】
そして、エンジン21に過負荷がかかっていると判断された場合、作業機30が最高作業機高さHmまで微上昇する。つまり、昇降アクチュエータ22を作動することで作業機30が微上昇する。また、エンジン21の過負荷の解消等により、作業機30の実作業機高さHmが最高作業機高さHmより高い位置であると、オペレーターに、各種設定の変更を行うように警告をする。エンジン21が過負荷状態でない場合で、作業機30の実作業機高さHrが設定作業機高Hsより高い位置にある場合、作業機30は設定作業機高さHsまで降下する。
【0085】
ただし、図4のステップS24において、実作業機高さHrが最高作業機高さHmに至ったと判断すると、オペレーターに作業機30が作業を行える高さ位置でないことを警告するのではなく、次に負荷車速制御へと移行する。
【0086】
作業機30が最高作業機高さHmまで微上昇して、エンジン21の過負荷が回避できない場合は、再び、ステップS22へと戻るのではなく、図3に示す負荷車速制御のステップS11へと移る。
【0087】
そして、ステップS11およびステップS12の各設定項目および各検知項目を取得・記憶して、次に実負荷率(Xs−Xr)/Xsが第一設定過負荷率L1(0.15と予め設定)以上であるか否かを判断する。つまり、エンジン21が過負荷状態であるか否かを判断する。(S13)。
【0088】
そして、エンジン21に過負荷がかかっていると判断された場合、減速率Bで減速し、負荷がかかり続けると最大減速割合Aまで減速する。負荷が解消すれば、設定変速位置Vs(設定車速)まで戻してから、負荷作業機昇降制御を行う。
【0089】
以上の如く、本実施形態の作業車両100のエンジン負荷制御装置50は、エンジン21と、該エンジン21の回転数を検知するエンジン回転数検知手段61と、前記エンジン21の負荷を検知する手段と、前記エンジン21からの出力を変速し駆動系に伝達する変速機(油圧式無段変速装置23)と、前記変速機を制御する手段と、作業車両100に装着する作業機30と、該作業機30を昇降する手段とを備え、過負荷となると車速を減速する負荷車速制御を行うエンジン負荷制御装置50であって、前記エンジン21の負荷率が設定値以上の過負荷となり、前記負荷車速制御を行う時に最大減速できる割合である最大減速割合Aを設定する最大減速割合設定手段73を備えるものである。このように構成することにより、作業にあった負荷車速制御を行うことが可能となる。
【0090】
本実施形態の作業車両100のエンジン負荷制御装置50は、前記負荷車速制御に伴う減速をする時の単位時間あたりの増減速量である減速率B(増速率C)を設定する増減速率設定手段74を備えるものである。このように構成することにより、オペレーターが減速率を変更することができるので、作業種類にあった負荷車速制御を行うことが可能となる。
【0091】
本実施形態の作業車両100のエンジン負荷制御装置50は、前記負荷車速制御に伴い最大減速した後にエンジン21の過負荷が軽減されないとき、作業機を設定量上昇させるように制御する負荷作業機昇降制御を備えるものである。このように構成することにより、負荷車速制御だけでなく作業機30を設定上昇させる制御を行うことで、負荷車速制御が多種多様になり、オペレーターの選択肢が広がる。設定値によって、オペレーターの意図で作業仕上げを優先するか、作業時間を優先するかを選択することができる。前記負荷車速制御による車速の減速割合Aおよび減速率B・増速率Cを変更することにより、効率の良いエンジン負荷制御を行うことが可能となる。
【0092】
本実施形態の作業車両のエンジン負荷制御装置50は、前記負荷車速制御と、前記負荷作業機昇降制御との、制御優先順位を設定する制御実行順序設定手段52を備えるものである。このように構成することにより、負荷車速制御が多種多様になり、オペレーターの選択肢が広がる。設定および設定値によって、オペレーターの意図で作業仕上げを優先するか、作業時間を優先するかを選択することが可能となる。
【0093】
本実施形態の作業車両のエンジン負荷制御装置50は、前記負荷車速制御に伴う最大減速割合Aを、作業の種類ごとに設定する作業種類設定手段53を備えるものである。このように構成することにより、作業種類設定手段53を備えることで、経験の浅い作業者や高齢者等でも作業種類にあった負荷車速制御が自動的にできる。
【符号の説明】
【0094】
21 エンジン
30 作業機
50 エンジン負荷制御装置
52 制御実行順序設定手段
53 作業種類設定手段
61 エンジン回転数検知手段
72 変速位置設定手段
73 最大減速割合設定手段
74 増減速率設定手段
100 作業車両
A 最大減速割合
B 減速率
C 増速率
【特許請求の範囲】
【請求項1】
エンジン(21)と、該エンジン(21)の回転数を検知する手段(61)と、前記エンジンの負荷を検知する手段と、前記エンジン(21)からの出力を変速し、駆動系に伝達する変速機(23)と、該変速機(23)を制御する手段と、作業車両(100)に装着する作業機(30)と、該作業機(30)を昇降する手段(22)とを備え、該エンジン(21)が過負荷状態になると車速を減速する負荷車速制御、作業機を昇降する負荷作業機昇降制御を行う、エンジン負荷制御装置(50)を具備し、該エンジン負荷制御装置(50)は、エンジン回転数を設定エンジン回転数(Xs)に保つように、該エンジン(21)が過負荷となった時の負荷に応じて、車速を増減し、又は作業機(30)を昇降する構成とし、前記負荷車速制御と、前記負荷作業機昇降制御との、制御優先順位を設定する制御実行順序設定手段(52)を備えることを特徴とする作業車両のエンジン負荷制御装置。
【請求項2】
請求項1記載の作業車両のエンジン負荷制御装置において、該制御実行順序設定手段(52)は、「負荷車速制御優先モード」と、「負荷作業機昇降制御優先モード」と、「負荷車速制御モード」と、「負荷作業機昇降モード」を選択設定し、「負荷車速制御優先モード」は、エンジン(21)に過負荷がかかると先ず負荷車速制御を行い、さらにエンジン21に過負荷がかかっていると負荷作業機昇降制御を行い、「負荷作業機昇降制御優先モード」は、エンジン(21)に過負荷がかかると先ず負荷作業機昇降制御を行い、さらにエンジン(21)に過負荷がかかっていると負荷車速制御を行い、「負荷車速制御モード」は、エンジン(21)に過負荷がかかると負荷車速制御のみを行い、「負荷作業機昇降モード」は、エンジン(21)に過負荷がかかると負荷車速制御のみを行うことを特徴とする作業車両のエンジン負荷制御装置。
【請求項1】
エンジン(21)と、該エンジン(21)の回転数を検知する手段(61)と、前記エンジンの負荷を検知する手段と、前記エンジン(21)からの出力を変速し、駆動系に伝達する変速機(23)と、該変速機(23)を制御する手段と、作業車両(100)に装着する作業機(30)と、該作業機(30)を昇降する手段(22)とを備え、該エンジン(21)が過負荷状態になると車速を減速する負荷車速制御、作業機を昇降する負荷作業機昇降制御を行う、エンジン負荷制御装置(50)を具備し、該エンジン負荷制御装置(50)は、エンジン回転数を設定エンジン回転数(Xs)に保つように、該エンジン(21)が過負荷となった時の負荷に応じて、車速を増減し、又は作業機(30)を昇降する構成とし、前記負荷車速制御と、前記負荷作業機昇降制御との、制御優先順位を設定する制御実行順序設定手段(52)を備えることを特徴とする作業車両のエンジン負荷制御装置。
【請求項2】
請求項1記載の作業車両のエンジン負荷制御装置において、該制御実行順序設定手段(52)は、「負荷車速制御優先モード」と、「負荷作業機昇降制御優先モード」と、「負荷車速制御モード」と、「負荷作業機昇降モード」を選択設定し、「負荷車速制御優先モード」は、エンジン(21)に過負荷がかかると先ず負荷車速制御を行い、さらにエンジン21に過負荷がかかっていると負荷作業機昇降制御を行い、「負荷作業機昇降制御優先モード」は、エンジン(21)に過負荷がかかると先ず負荷作業機昇降制御を行い、さらにエンジン(21)に過負荷がかかっていると負荷車速制御を行い、「負荷車速制御モード」は、エンジン(21)に過負荷がかかると負荷車速制御のみを行い、「負荷作業機昇降モード」は、エンジン(21)に過負荷がかかると負荷車速制御のみを行うことを特徴とする作業車両のエンジン負荷制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−50111(P2013−50111A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2012−261750(P2012−261750)
【出願日】平成24年11月29日(2012.11.29)
【分割の表示】特願2009−62084(P2009−62084)の分割
【原出願日】平成21年3月13日(2009.3.13)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成24年11月29日(2012.11.29)
【分割の表示】特願2009−62084(P2009−62084)の分割
【原出願日】平成21年3月13日(2009.3.13)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【Fターム(参考)】
[ Back to top ]