
作業車両のクラッチ制御装置
【課題】作業車両の状態に対応したタイミングでクラッチを解放して、作業車両を滑らかに停止させる。
【解決手段】作業車両のクラッチ制御装置は、アクセルペダル12の踏み込みの有無を判定するアクセルペダル踏込判定手段10と、車速を検出する車速検出手段16と、制動力を検出する制動力検出手段33と、アクセルペダル踏込判定手段10によって判定されるアクセルペダル12の踏み込みの有無、車速検出手段16によって検出される作業車両の車速、および制動力検出手段33によって検出される作業車両の制動力に基づいて、クラッチカットオフ条件が成立しているか否かを判定する判定手段10と、判定手段10によりクラッチカットオフ条件が成立していると判定された場合に、クラッチ18,19を解放するようにクラッチ18,19の係合/解放を制御するクラッチ制御手段10とを備えることを特徴とする作業車両のクラッチ制御装置である。
【解決手段】作業車両のクラッチ制御装置は、アクセルペダル12の踏み込みの有無を判定するアクセルペダル踏込判定手段10と、車速を検出する車速検出手段16と、制動力を検出する制動力検出手段33と、アクセルペダル踏込判定手段10によって判定されるアクセルペダル12の踏み込みの有無、車速検出手段16によって検出される作業車両の車速、および制動力検出手段33によって検出される作業車両の制動力に基づいて、クラッチカットオフ条件が成立しているか否かを判定する判定手段10と、判定手段10によりクラッチカットオフ条件が成立していると判定された場合に、クラッチ18,19を解放するようにクラッチ18,19の係合/解放を制御するクラッチ制御手段10とを備えることを特徴とする作業車両のクラッチ制御装置である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、作業車両のクラッチ制御装置に関する。
【背景技術】
【0002】
車速とブレーキペダルの操作による制動力の大きさに応じて、クラッチを解放して走行駆動力の車輪への伝達を遮断するようにしたクラッチ制御装置が知られている(特許文献1参照)。
【0003】
特許文献1に記載のクラッチ制御装置では、低速走行時にクラッチが解放される制動力よりも、高速走行時にクラッチが解放される制動力の方が大きい。したがって、高速走行時では、低速走行時にクラッチが解放されるブレーキペダル操作量であってもクラッチが解放されず、エンジンブレーキを効果的に発揮させてサービスブレーキに大きな負担をかけることなく車両を減速できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−299732号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載のクラッチ制御装置では、作業車両の走行状態を車速が低速か高速かで判断し、低速走行時と高速走行時とのそれぞれでクラッチが解放されるブレーキ圧カットオフ閾値が設定されている。特許文献1に記載のクラッチ制御装置では、作業車両の状態が十分に考慮されているとはいえず、作業車両の状態によっては、クラッチの解放タイミングが適切ではなくなってしまう。
【課題を解決するための手段】
【0006】
請求項1に係る発明は、アクセルペダルの踏み込みの有無を判定するアクセルペダル踏込判定手段と、作業車両の車速を検出する車速検出手段と、作業車両の制動力を検出する制動力検出手段と、アクセルペダル踏込判定手段によって判定されるアクセルペダルの踏み込みの有無、車速検出手段によって検出される作業車両の車速、および、制動力検出手段によって検出される作業車両の制動力に基づいて、クラッチカットオフ条件が成立しているか否かを判定する判定手段と、判定手段によりクラッチカットオフ条件が成立していると判定された場合に、クラッチを解放するようにクラッチの係合/解放を制御するクラッチ制御手段とを備えることを特徴とする作業車両のクラッチ制御装置である。
請求項2に係る発明は、請求項1に記載の作業車両のクラッチ制御装置において、クラッチカットオフ条件は、低速側では、アクセルペダルの踏み込み有りの場合よりも、アクセルペダルの踏み込み無しの場合の方が、低い制動力でクラッチが解放されるように定められていることを特徴とする。
請求項3に係る発明は、請求項1または2に記載の作業車両のクラッチ制御装置において、クラッチカットオフ条件は、アクセルペダルの踏み込み有りの場合では、車速が高いほど、低い制動力でクラッチが解放され、アクセルペダルの踏み込み無しの場合では、車速に拘わらず、所定の制動力でクラッチが解放されるように定められていることを特徴とする。
請求項4に係る発明は、請求項1ないし3のいずれか1項に記載の作業車両のクラッチ制御装置において、トランスミッションの設定速度段を検出する速度段検出手段をさらに備え、判定手段は、速度段検出手段によって検出されるトランスミッションの設定速度段も加味してクラッチカットオフ条件が成立しているか否かを判定し、クラッチカットオフ条件は、少なくとも1速の場合よりも2速の場合の方が、低い制動力でクラッチが解放されるように定められていることを特徴とする。
請求項5に係る発明は、アクセルペダルの踏み込みの有無を判定するアクセルペダル踏込判定手段と、作業車両の制動力を検出する制動力検出手段と、アクセルペダル踏込判定手段によって判定されるアクセルペダルの踏み込みの有無、および、制動力検出手段によって検出される作業車両の制動力に基づいて、クラッチカットオフ条件が成立しているか否かを判定する判定手段と、判定手段によりクラッチカットオフ条件が成立していると判定された場合に、クラッチを解放するようにクラッチの係合/解放を制御するクラッチ制御手段とを備えることを特徴とする作業車両のクラッチ制御装置である。
請求項6に係る発明は、請求項5に記載の作業車両のクラッチ制御装置において、クラッチカットオフ条件は、アクセルペダルの踏み込み有りの場合よりも、アクセルペダルの踏み込み無しの場合の方が、低い制動力でクラッチが解放されるように定められていることを特徴とする。
請求項7に係る発明は、請求項5または6に記載の作業車両のクラッチ制御装置において、トランスミッションの設定速度段を検出する速度段検出手段をさらに備え、判定手段は、速度段検出手段によって検出されるトランスミッションの設定速度段も加味してクラッチカットオフ条件が成立しているか否かを判定し、クラッチカットオフ条件は、少なくとも1速の場合よりも2速の場合の方が、低い制動力でクラッチが解放されるように定められていることを特徴とする。
請求項8に係る発明は、作業車両の車速を検出する車速検出手段と、作業車両の制動力を検出する制動力検出手段と、車速検出手段によって検出される作業車両の車速、および、制動力検出手段によって検出される作業車両の制動力に基づいて、クラッチカットオフ条件が成立しているか否かを判定する判定手段と、判定手段によりクラッチカットオフ条件が成立していると判定された場合に、クラッチを解放するようにクラッチの係合/解放を制御するクラッチ制御手段とを備え、クラッチカットオフ条件は、車速が高いほど、低い制動力でクラッチが解放されるように定められていることを特徴とする作業車両のクラッチ制御装置である。
請求項9に係る発明は、請求項8に記載の作業車両のクラッチ制御装置において、トランスミッションの設定速度段を検出する速度段検出手段をさらに備え、判定手段は、速度段検出手段によって検出されるトランスミッションの設定速度段も加味してクラッチカットオフ条件が成立しているか否かを判定し、クラッチカットオフ条件は、少なくとも1速の場合よりも2速の場合の方が、低い制動力でクラッチが解放されるように定められていることを特徴とする。
請求項10に係る発明は、請求項1ないし9のいずれか1項に記載の作業車両のクラッチ制御装置において、車速検出手段の異常を判定する異常判定手段をさらに備え、異常判定手段により車速検出手段の異常が判定されたとき、アクセルペダル踏込判定手段によって判定されるアクセルペダルの踏み込みの有無、および、車速検出手段によって検出される作業車両の車速に拘わらずに、所定の制動力でクラッチが解放されることを特徴とする。
請求項11に係る発明は、請求項1ないし10のいずれか1項に記載の作業車両のクラッチ制御装置において、少なくとも、クラッチを低い制動力で解放する第1モードと、クラッチを高い制動力で解放する第2モードとの間で、クラッチカットオフ条件を選択可能なモード切替手段をさらに備えていることを特徴とする。
請求項12に係る発明は、請求項1ないし11のいずれか1項に記載の作業車両のクラッチ制御装置において、複数の速度段を有するトランスミッションを備え、判定手段は、トランスミッションが低速度段に設定されている場合にのみ、クラッチカットオフ条件が成立しているか否かを判定することを特徴とする。
【発明の効果】
【0007】
本発明によれば、作業車両の状態に対応したタイミングでクラッチを解放して、作業車両を滑らかに停止させることができる。
【図面の簡単な説明】
【0008】
【図1】作業車両の一例であるホイールローダの側面図。
【図2】ホイールローダの制御系の概略構成を示す図。
【図3】速度段毎の車速と走行駆動力との関係を示す図。
【図4】トランスミッションの概略構成を示す図。
【図5】トルコン速度比と速度段との関係を示す図。
【図6】ブレーキペダルの操作量とブレーキ圧の関係を示す図。
【図7】アクセルペダルの操作量と目標エンジン回転速度の関係を示す図。
【図8】Vシェープローディングについて示す図。
【図9】土砂等のダンプトラックへの積み込みの際のホイールローダの状態を説明する図。
【図10】傾斜路において作業する際のホイールローダの状態を説明する図。
【図11】クラッチカットオフ条件を示す図。
【図12】本発明の一実施の形態によるホイールローダにおけるクラッチ制御処理の動作を示したフローチャート。
【図13】本発明の一実施の形態によるホイールローダにおけるクラッチ制御処理の動作を示したフローチャート。
【図14】本発明の一実施の形態によるホイールローダにおけるクラッチ制御処理の動作を示したフローチャート。
【図15】本発明の一実施の形態によるホイールローダにおけるクラッチ制御処理の動作を示したフローチャート。
【発明を実施するための形態】
【0009】
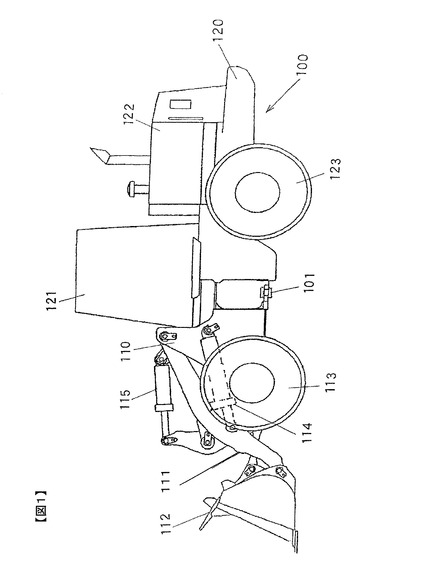
以下、図面を参照して、本発明に係る作業車両のクラッチ制御装置の一実施の形態について説明する。図1は、一実施の形態に係るクラッチ制御装置が適用される作業車両の一例であるホイールローダの側面図である。ホイールローダ100は、アーム111、作業機装置であるバケット112、タイヤ113等を有する前部車体110と、運転室121、エンジン室122、タイヤ123等を有する後部車体120とで構成される。アーム111はアームシリンダ114の駆動により上下方向に回動(俯仰動)し、バケット112はバケットシリンダ115の駆動により上下方向に回動(クラウドまたはダンプ)する。前部車体110と後部車体120はセンタピン101により互いに回動自在に連結され、ステアリングシリンダ(不図示)の伸縮により後部車体120に対し前部車体110が左右に屈折する。
【0010】
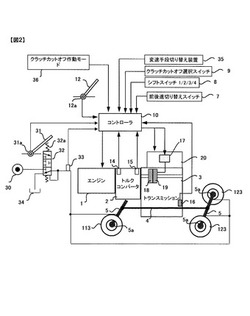
図2は、ホイールローダ100の制御系の概略構成を示す図である。エンジン1の出力軸にはトルクコンバータ2(以下、トルコンと呼ぶ)の入力軸21(図4参照)が連結され、トルコン2の出力軸22(図4参照)はトランスミッション3に連結されている。トルコン2は周知のインペラ,タービン,ステータからなる流体クラッチであり、エンジン1の回転はトルコン2を介してトランスミッション3に伝達される。トランスミッション3は、後述するようにその速度段を1速〜4速に切り替える液圧クラッチを有し、トルコン2の出力軸22の回転はトランスミッション3で変速される。変速後の回転が、プロペラシャフト4,アクスル5を介してタイヤ113,123に伝達されて、ホイールローダ100が走行する。
【0011】
アクスル5には、ホイールローダ100を減速、停止させるためのブレーキ部5aが設けられている。ブレーキ部5aは、ブレーキバルブ32を介してブレーキ油が供給されると、作動油の圧力に応じた制動力を発生させる。ブレーキバルブ32は、作動油の油圧源30から供給される圧油をばね32aの圧縮力に応じた圧力に減圧する減圧弁である。運転室121内に設けられたブレーキペダル31がオペレータによって踏み込まれて、ブレーキペダル31の踏み込み力に応じてばね32aが圧縮されると、ブレーキバルブ32は、作動油の油圧源30から供給される圧油をブレーキペダル31の踏み込み力に応じた圧力となるように減圧する。ブレーキバルブ32は、ばね32aの圧縮力(すなわちブレーキペダル31の踏み込み力)が高くなるほど、高い圧力の作動油をブレーキ部5aに供給するように、作動油の圧力を減圧する。34は作動油タンクである。
【0012】
なお、不図示の作業用油圧ポンプはエンジン1により駆動され、この油圧ポンプからの吐出油は不図示の方向制御弁を介して作業用アクチュエータ(たとえばアームシリンダ114)に導かれる。方向制御弁は不図示の操作レバーの操作により駆動され、操作レバーの操作量に応じてアクチュエータが駆動される。
【0013】
トルコン2は入力トルクに対して出力トルクを増大させる機能、つまりトルク比を1以上とする機能を有する。トルク比は、トルコン2の入力軸21の回転数Niと出力軸22の回転数Ntの比であるトルコン速度比e(=Nt/Ni)の増加に伴い小さくなる。たとえばエンジン回転数が一定状態で走行中に走行負荷が大きくなると、トルコン2の出力軸22の回転数Ntが低下、つまり車速が低下し、トルコン速度比eが小さくなる。このとき、トルク比は増加するため、より大きな走行駆動力(牽引力)で車両走行可能となる。
【0014】
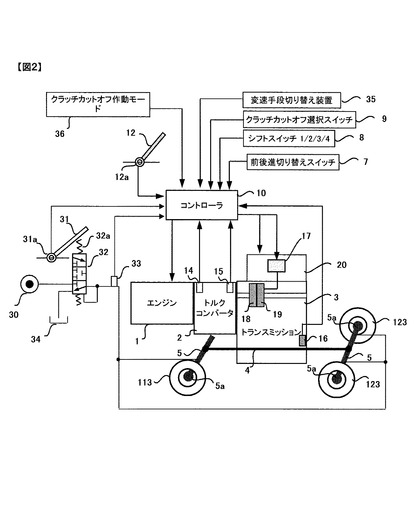
トランスミッション3は、トルコン出力を1速〜4速のいずれかに変速する。速度段毎の車速と走行駆動力との関係は図3に示すとおりであり、同一速度段で比較すると車速が遅いと走行駆動力は大きく(低速高トルク)、車速が速いと走行駆動力は小さくなる(高速低トルク)。また、速度段が小さいほど、同一車速において大きな走行駆動力を得ることができる。
【0015】
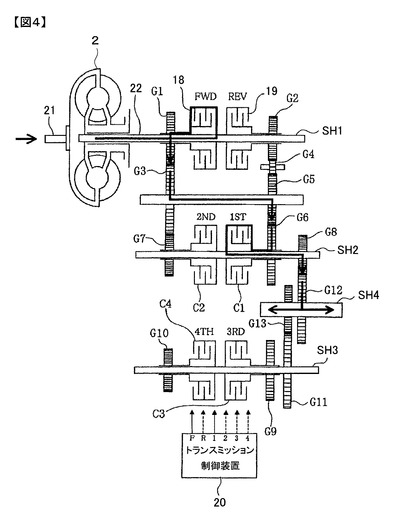
トランスミッション3の構成について説明する。図4は、トランスミッション3の概略構成を示す図である。トランスミッション3は、複数のクラッチシャフトSH1〜SH3、アウトプットシャフトSH4、複数のギヤG1〜G13、前進用の油圧クラッチ(前進クラッチ)18、後進用の油圧クラッチ(後進クラッチ)19、1速〜4速用の油圧クラッチC1〜C4を備える。各油圧クラッチ18,19,C1〜C4は、トランスミッション制御装置20を介して供給される圧油(クラッチ圧)により係合動作または解放動作を行う。すなわち油圧クラッチ18,19,C1〜C4に供給されるクラッチ圧が増加するとクラッチ18,19,C1〜C4は係合動作を行い、クラッチ圧が減少すると解放動作を行う。
【0016】
トルコン2の出力軸22は、クラッチシャフトSH1に連結され、アウトプットシャフトSH4の両端部は、図2のプロペラシャフト4を介して車両前後のアクスル5に連結されている。図4では、前進クラッチ18と1速用クラッチC1とが係合状態で、他のクラッチ19,C2〜C4が解放状態にある。この場合には、ギヤG1とクラッチシャフトSH1が一体になって回転するとともに、ギヤG6とクラッチシャフトSH2が一体になって回転する。
【0017】
このときエンジン1の出力トルクは、図4に太線で示すようにトルコン2の入力軸21、出力軸22、クラッチシャフトSH1、前進クラッチ18、ギヤG1,G3,G5,G6、1速用クラッチC1、クラッチシャフトSH2、ギヤG8,G12を介してアウトプットシャフトSH4に伝達される。これにより1速走行が可能となる。
【0018】
1速から2速に変速する場合には、トランスミッション制御装置20を介して供給されるクラッチ圧により1速用クラッチC1を解放状態とし、2速用クラッチC2を係合状態とする。これによりエンジン1の出力トルクは、トルコン2の入力軸21、出力軸22、クラッチシャフトSH1、前進クラッチ18、ギヤG1,G3,G7、2速用クラッチC2、クラッチシャフトSH2、ギヤG8,G12を介してアウトプットシャフトSH4に伝達され、2速走行が可能となる。1速から2速以外の変速、すなわち2速から3速、3速から4速、4速から3速、3速から2速、2速から1速への変速も同様にクラッチC1〜C4を制御することで行われる。
【0019】
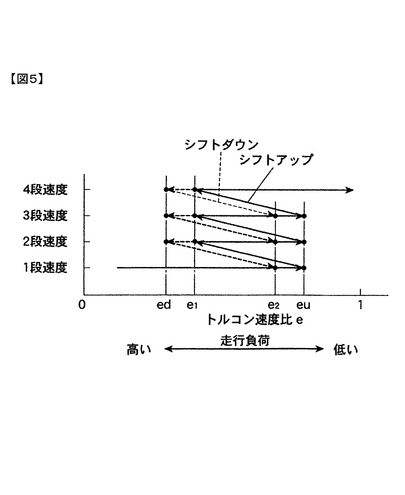
自動変速制御には、トルコン速度比eが所定値に達すると変速するトルコン速度比基準制御と、車速が所定値に達すると変速する車速基準制御の2つの方式がある。本実施の形態では、トルコン速度比基準制御によりトランスミッション3の速度段を制御する。
【0020】
図5は、トルコン速度比eと速度段の関係を示す図である。走行負荷が低くなり、トルコン速度比eが増加してトルコン速度比eが所定値eu以上になると、速度段は1段シフトアップする。これによりトルコン速度比eがe1(ed<e1<eu)となる。反対に走行負荷が高くなり、トルコン速度比eが低下してトルコン速度比eが所定値ed以下になると、速度段は1段シフトダウンする。これによりトルコン速度比eがe2(ed<e2<eu)となる。所定値eu,edは、予めコントローラ10に設定されている。コントローラ10は、トランスミッション3の現在設定されている速度段(以下、設定速度段と称す)を検出する。
【0021】
図2に示すコントローラ10は、CPU,ROM,RAM,その他の周辺回路などを有する演算処理装置を含んで構成される。コントローラ10には、アクセルペダル12のペダル操作量s(ペダルストロークまたはペダル角度)を検出するペダル操作量検出器12aと、トルコン2の入力軸21の回転数Niを検出する回転数検出器14と、トルコン2の出力軸22の回転数Ntを検出する回転数検出器15とが接続されている。コントローラ10にはまた、プロペラシャフト4の回転速度を検出する車速検出器16が接続され、コントローラ10は、車速検出器16からの出力値に基づきホイールローダ100の車速vを演算する。
【0022】
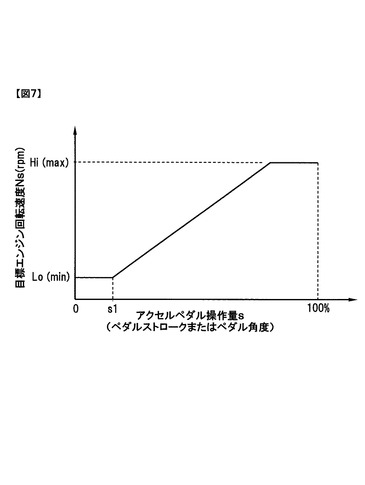
コントローラ10は、ペダル操作量検出器12aからのペダル操作量sが所定値s1(図7参照)以上である場合には、アクセルペダル12の踏み込み有りと判定し、ペダル操作量検出器12aからのペダル操作量sが所定値s1未満である場合には、アクセルペダル12の踏み込み無しと判定する。所定値s1は、目標エンジン回転速度Nsをローアイドル回転速度(たとえば、1200rpm)から上昇させる閾値としても設定されており(図7参照)、予めコントローラ10のROMまたはRAMに記憶されている。
【0023】
図2に示すように、コントローラ10には、車両の前後進を指令する前後進切り替えスイッチ7と、クラッチカットオフ(後述)を行うか否かを選択するクラッチカットオフ選択スイッチ9と、トランスミッション3における変速を自動で行うか手動で行うかを切り替える変速手段切り替え装置35とが接続されている。コントローラ10にはまた、手動変速時における速度段または自動変速時における1速〜4速の間で最大速度段を指令するシフトスイッチ8と、後述するように前後進用のクラッチ18,19をカットオフする際の条件を切り替えるクラッチカットオフ作動モード切り替えスイッチ36とが接続されている。コントローラ10は、現在の作動モード(第1モード/第2モード)を検出する。
【0024】
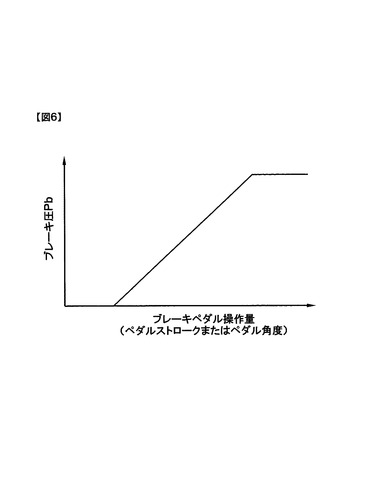
コントローラ10には、ブレーキペダル31の操作量(ペダルストロークまたはペダル角度)を検出するペダル操作量検出器31aと、ブレーキ部5aに供給される作動油の圧力を検出する圧力センサ33とが接続されている。図6は、ブレーキペダル31の操作量とブレーキ圧Pbの関係を示す図である。ブレーキペダル31の操作量が大きくなるとブレーキ圧Pbは大きくなり、ペダル操作量に応じてホイールローダ100に制動力が作用する。
【0025】
コントローラ10は、ペダル操作量検出器12aで検出したアクセルペダル12の操作量に応じてエンジン1の回転速度(回転数)を制御する。図7は、アクセルペダル12の操作量sと目標エンジン回転速度Nsの関係を示す図である。アクセルペダル12の操作量sが大きくなると目標エンジン回転速度Nsは大きくなり、ペダル最大踏み込み時の目標エンジン回転速度Nsは定格回転速度となる。コントローラ10はこの目標エンジン回転速度Nsに対応した制御信号をエンジン制御部(不図示)に出力し、エンジン1の実回転速度が目標エンジン回転速度Nsとなるように制御する。オペレータは、車速を増加または走行駆動力を増加させたい場合に、アクセルペダル12の操作量sを増やし、エンジン回転速度を大きくする。
【0026】
ホイールローダ100でダンプトラックに土砂等を積み込む作業を行う場合などには、オペレータは、ダンプトラックへ接近する際にブレーキペダル31を踏み込んでホイールローダ100を減速させながら、バケット112を上げるためにアクセルペダル12も踏み込んでエンジン1の回転数を高回転で維持するようにしている。コントローラ10は、クラッチカットオフを作動するようにクラッチカットオフ選択スイッチ9が選択されている場合には、後述するクラッチカットオフ条件が満たされたと判定されると、クラッチ18,19を解放状態(カットオフ)とするための制御信号(カットオフ信号)をトランスミッション制御装置20に出力する。トランスミッション制御装置20では、カットオフ信号を受信すると、トランスミッション制御装置20に設けられているクラッチカットオフ弁17(図2参照)がクラッチ18,19を作動させるためのクラッチ圧を減少させる。これにより、クラッチ18,19が解放され、走行駆動力(以下、単に駆動力と呼ぶ)の伝達が遮断される。クラッチ18,19を解放することを、クラッチカットオフと呼ぶ。
【0027】
コントローラ10は、クラッチカットオフをしないようにクラッチカットオフ選択スイッチ9が選択されている場合には、クラッチカットオフ条件が満たされてもカットオフ信号を出力しない。したがって、クラッチカットオフをしないようにクラッチカットオフ選択スイッチ9が選択されている場合には、上述したクラッチカットオフは行われない。
【0028】
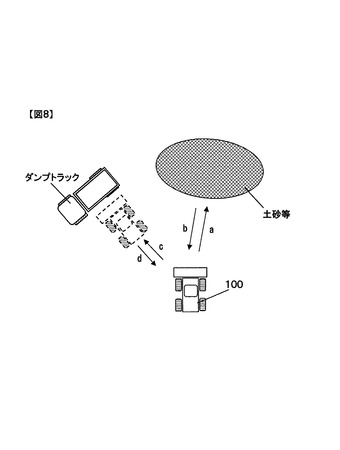
図8は、土砂等をダンプトラックへ積み込む方法の1つであるVシェープローディングについて示す図である。Vシェープローディングでは、まず、矢印aで示すように、ホイールローダ100を前進させて土砂等をすくい込み、その後、矢印bで示すように、ホイールローダ100を一旦後退させる。そして、矢印cで示すように、ダンプトラックに向けてホイールローダ100を前進させて、すくい込んだ土砂等をダンプトラックに積み込み、矢印dで示すように、ホイールローダ100を元の位置に後退させる。
【0029】
図8の矢印cで示す土砂等のダンプトラックへの積み込みの際には、掘削時のように大きな駆動力が必要ではないため、オペレータは、通常、シフトスイッチ8によって最大速度段を2速に設定するか、変速手段切り替え装置35でトランスミッション3における変速を手動で行うように切り替えた上で、速度段を2速に固定するように設定している。
【0030】
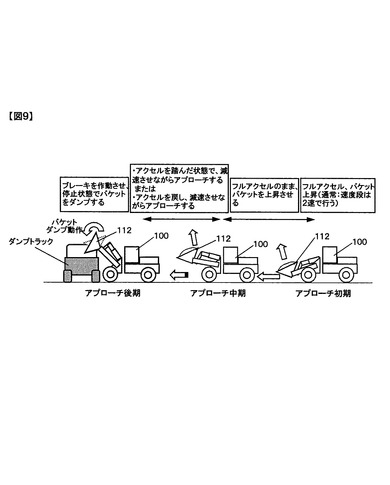
図9は、図8の矢印cで示す土砂等のダンプトラックへの積み込みの際のホイールローダ100の状態を説明する図である。説明の便宜上、土砂等を積み込む作業を行う際に接近する対象物であるダンプトラックへ接近する際の初期の期間であって、ホイールローダ100を加速させる期間をアプローチ初期と呼ぶ。ダンプトラックへアプローチする際の中期の期間であって、ホイールローダ100を減速し始めてからホイールローダ100が停止するまでの期間をアプローチ中期と呼ぶ。ホイールローダ100が停止してから、バケット112内の土砂等をダンプトラックに放土し終えるまでの期間をアプローチ後期と呼ぶ。
【0031】
図9に示すように、アプローチ初期では、ホイールローダ100を加速させるとともにバケット112を上昇させるため、アクセルペダル12が最大限に踏み込まれる。アプローチ中期では、バケット112を上昇させるため、アクセルペダル12が最大限に踏み込まれるが、ホイールローダ100を減速させるためにブレーキペダル31も徐々に踏み込まれる。なお、アプローチ中期では、走行中にバケット112の上昇が完了し、アクセルペダル12を戻し操作した状態でホイールローダ100を減速させるためにブレーキペダル31を徐々に踏み込む場合もある。
【0032】
アプローチ後期では、ホイールローダ100を停止させておくためにブレーキペダル31が最大限に踏み込まれる。クラッチカットオフをするようにクラッチカットオフ選択スイッチ9が選択されている場合には、アプローチ中期のオペレータによるブレーキペダル31の踏み込みなどによって、後述するクラッチカットオフ条件が満たされると、上述したように、クラッチカットオフが行われる。
【0033】
アプローチ中期で、アクセルペダル12を踏み込んでバケット112を上昇させつつ、ブレーキペダル31を徐々に踏み込んでホイールローダ100を減速させる際にクラッチカットオフ条件が満たされる場合、ダンプトラックへの接近時に駆動力の伝達が遮断されるので、駆動力に抗してホイールローダ100を減速および停止させる必要がない。これにより、クラッチカットオフをせずに駆動力に抗してホイールローダ100を減速および停止させたときと比べて、ブレーキ部5aに対する負担を減らすことができ、ブレーキ部5aの温度上昇を抑制し、ブレーキ部5aの各部の消耗を抑制できる。クラッチカットオフを作動させた場合は、エンジン1の回転数が高い状態を維持させつつホイールローダ100を減速、停止させても、入力軸21と出力軸22の回転数比であるトルコン速度比eがほぼ1の状態であり、エンジン1からトルコン2への入力トルクが非常に小さいので、トルコン2における動力損失を低減して、燃料消費量を低減できる。
【0034】
しかし、クラッチカットオフのタイミングが早過ぎる場合には、駆動力が制動力により十分に抑えられる前にクラッチカットオフによって駆動力の伝達が突然遮断されることとなるので、ホイールローダ100の駆動力が急激に減少してホイールローダ100の車体全体が前後方向に揺れるピッチングを誘発するおそれがある。土砂等を積み込む作業を行う場合などには、バケット112の位置が高いため、ピッチングがより大きくなる傾向にある。ピッチングが発生すると、乗り心地が悪化するだけでなく、バケット112に積んである土砂等がこぼれてしまうこともある。そのため、オペレータは車両を滑らかに減速させて停止させるために、ブレーキ部5aの作動に注意しながら運転していた。
【0035】
ピッチングを嫌うオペレータは、従来のホイールローダにてダンプトラックに土砂等を積み込む作業を行う場合などには、クラッチカットオフをしないようにクラッチカットオフ選択スイッチ9を選択して、上述したクラッチカットオフが行われないようにしていることがある。この場合には、上述したようなピッチングを誘発するおそれはないが、ブレーキ部5aの各部の消耗や、トルコン2における動力損失の増大を招くこととなる。
【0036】
クラッチカットオフのタイミングが早過ぎる場合に生じるピッチングを防止して、作業車両を滑らかに減速、停止させるためには、クラッチカットオフを作動させる前にブレーキ部5aの制動力により車輪へ伝達される駆動力を十分に抑えておく必要がある。なお、同一速度段では車速が低いほど駆動力が大きい(図3参照)。したがって、車速が低いほど高い制動力でクラッチ18,19を解放し、車速が高いほど低い制動力でクラッチ18,19を解放することが望ましい。
【0037】
以上の制御により、車速が低い状態、すなわち駆動力が大きい状態であっても、高い制動力で駆動力を十分に抑えた上でクラッチカットオフを作動させることができるため、作業車両を滑らかに減速させることができる。なお、クラッチカットオフのタイミングが遅過ぎる場合には、クラッチカットオフによって駆動力の伝達が遮断されるとともに高い制動力が作用するため、ホイールローダ100が急停止して、上述したようなピッチングを誘発するおそれがある点を考慮する必要がある。
【0038】
アプローチ中期では、上記したように、走行中にバケット112の上昇が完了し、アクセルペダル12を戻し操作した状態でホイールローダ100を減速させるためにブレーキペダル31を徐々に踏み込む場合もある。アクセルペダル12が踏み込まれていない走行状態では、駆動力が小さく、車両はエンジンブレーキにより減速している。したがって、早いタイミングでクラッチカットオフを作動させてもピッチングを誘発することなく、車両を滑らかに停止させることができる。ただし、クラッチカットオフ後の制動力が小さすぎると、制動距離がいたずらに長くなってしまうため、ある程度の制動力でクラッチカットオフをすることが望ましい。これにより、エンジンブレーキとブレーキ部5aの制動力により車両を十分に減速させた上でクラッチカットオフが行われるため、制動距離を短くすることができる。
【0039】
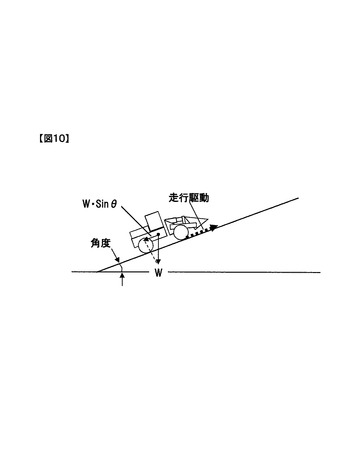
図10に示すように、急勾配(たとえば傾斜角度が25度程度)の傾斜路を上りながら作業を行う場合には、一般的に大きな駆動力を必要とするため、トランスミッション3の速度段は低速の1速に設定されている。急な傾斜路では、ホイールローダ100の自重がホイールローダ100が下がる方向(後退する方向)への走行負荷として作用するため、平地と同じ条件でクラッチカットオフを行うとクラッチカットオフのタイミングが早過ぎる。そのため、制動力が十分ではない状態でクラッチカットオフによって駆動力が断たれてしまうため、ホイールローダ100がそれまでとは逆に傾斜路を下降し始めてしまう。この場合、オペレータがさらにブレーキペダルを踏み込んでホイールローダ100を停止させようとするので、ホイールローダ100が急停止して、上述したようなピッチングを誘発するおそれがある。
【0040】
したがって、平地でのバケット112の上昇を伴う土砂等の積み込み作業においては、早めにクラッチカットオフを作動させ、急な傾斜路での作業においては、遅めにクラッチカットオフを作動させることが望ましい。
【0041】
上述したクラッチカットオフ作動モード切り替えスイッチ36は、オペレータの操作によって手動で、クラッチカットオフのタイミングを早い第1モードと、遅い第2モードとの間で切り替えることができるように構成されている。換言すれば、クラッチカットオフ作動モード切り替えスイッチ36は、クラッチ18,19を低い制動力で解放する第1モードと、クラッチ18,19を高い制動力で解放する第2モードとの間で、クラッチカットオフ条件を選択可能に構成されている。平地での土砂等の積み込み作業には、クラッチカットオフが早めに作動する第1モードが適している。一方、急勾配(たとえば傾斜角度が25度以上)の傾斜路での作業には、クラッチカットオフが遅めに作動する第2モードが適している。
【0042】
本実施の形態のホイールローダ100では、クラッチカットオフの作動タイミングが以下に述べるように自動で設定される。これにより、本実施の形態では、種々の走行/作業状況に応じてクラッチカットオフのタイミングが適切となる。
【0043】
−−−クラッチカットオフ制御−−−
本実施の形態では、上述したような種々の走行/作業状況に対応した最適なタイミングでのクラッチカットオフを実現するために、以下のようにクラッチカットオフの作動タイミングを決定する。
(1)アクセルペダル12を最大限に踏み込んでバケット112を上昇させつつ、ブレーキペダル31を徐々に踏み込んでホイールローダ100を減速させながらダンプトラックにアプローチする走行状態においては、車速が高いほど、早めにクラッチカットオフを作動させる。
(2)アクセルペダル12を戻し操作して、ブレーキペダル31を徐々に踏み込んでホイールローダ100を減速させながらダンプトラックにアプローチする走行状態においては、車速に拘わらず、所定のタイミングでクラッチカットオフを作動させる。
(3)トランスミッション3の速度段が2速に設定された状態で行われる平地での作業等のクラッチカットオフの作動タイミングに比べて、トランスミッション3の速度段が1速に設定された状態で行われる急な傾斜路での作業等の際のクラッチカットオフの作動タイミングを遅くする。
(4)上記(1)〜(3)のクラッチカットオフの作動タイミングは、第1モードに設定されている状態では早く、第2モードに設定されている状態では遅い。
【0044】
具体的には、コントローラ10は、アクセルペダル12の踏み込みの有無、車速v、トランスミッション3の設定速度段、クラッチカットオフの作動モード(第1/第2モード)およびブレーキ圧Pbの情報に基づいてクラッチカットオフ条件が成立しているか否かを判定し、クラッチカットオフ条件が成立していると判定したとき、クラッチ18,19を解放するようにクラッチ18,19の係合/解放を制御する。
【0045】
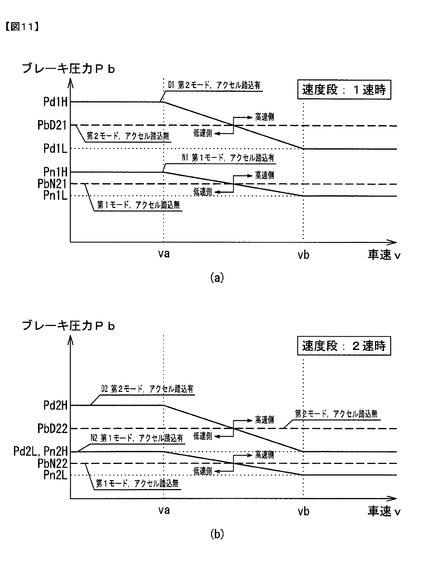
図11は、クラッチカットオフ条件を示す図であり、図11の横軸は車速v、縦軸はブレーキ圧Pbを表している。図11(a)では速度段が1速に設定されているときにクラッチカットオフを作動させる車速vとブレーキ圧Pbとの関係を示し、図11(b)では速度段が2速に設定されているときにクラッチカットオフを作動させる車速vとブレーキ圧Pbとの関係を示している。図11には、アクセルペダル12が踏み込まれている状態においてクラッチカットオフを作動させるブレーキ圧であるブレーキ圧カットオフ閾値Ptの特性N1,D1,N2およびD2が示されている。これらの特性N1,D1,N2,D2は、ルックアップテーブル形式でコントローラ10のROMまたはRAMに記憶されている。さらに、図11には、アクセルペダル12が踏み込まれていない状態においてクラッチカットオフを作動させるブレーキ圧であるブレーキ圧カットオフ閾値Pt(PbN21,PbD21,PbN22,PbD22)が破線で示されている。所定値PbN21,PbN22,PbD21,PbD22はコントローラ10のROMまたはRAMに記憶されている。
【0046】
なお、ブレーキ圧カットオフ閾値Ptの特性N1,D1,N2およびD2は、少なくとも、アクセルペダル12が最大限に踏み込まれていても、駆動力に抗して車速vを低下させることができる程度の制動力を発生させるブレーキ圧Pbに相当する値とされる。
【0047】
特性N1は、速度段が1速に設定され、かつ、クラッチカットオフの作動モードが第1モードに設定され、かつ、アクセルペダル12が踏み込まれているときに用いられる。特性D1は、速度段が1速に設定され、かつ、クラッチカットオフの作動モードが第2モードに設定され、かつ、アクセルペダル12が踏み込まれているときに用いられる。特性N2は、速度段が2速に設定され、かつ、クラッチカットオフの作動モードが第1モードに設定され、かつ、アクセルペダル12が踏み込まれているときに用いられる。特性D2は、速度段が2速に設定され、かつ、クラッチカットオフの作動モードが第2モードに設定され、かつ、アクセルペダル12が踏み込まれているときに用いられる。なお、特性N1,D1,N2,D2のそれぞれと、アクセルペダル踏込無のブレーキ圧カットオフ閾値Pt(PbN21,PbD21,PbN22,PbD22)のそれぞれとの交差点に相当する車速をそれぞれ基準車速とし、この基準車速に対して低い車速を低速側の車速、基準車速に対して高い車速を高速側の車速として定義する。
【0048】
特性N1に基づいてブレーキ圧カットオフ閾値Ptを設定する場合、車速vが低速側車速閾値va(たとえば2km/h)以上かつ高速側車速閾値vb(たとえば5km/h)以下の範囲(va≦v≦vb)では、車速vの増加に伴いブレーキ圧カットオフ閾値Ptは直線的に減少する。車速vが低速側車速閾値vaより小さいと、ブレーキ圧カットオフ閾値PtはPn1Hとなり、車速vが高速側車速閾値vbより大きいと、ブレーキ圧カットオフ閾値PtはPn1Lとなる。
同様に、特性D1に基づいてブレーキ圧カットオフ閾値Ptを設定する場合、車速vが低速側車速閾値va以上かつ高速側車速閾値vb以下の範囲(va≦v≦vb)では、車速vの増加に伴いブレーキ圧カットオフ閾値Ptは直線的に減少する。車速vが低速側車速閾値vaより小さいと、ブレーキ圧カットオフ閾値PtはPd1Hとなり、車速vが高速側車速閾値vbより大きいと、ブレーキ圧カットオフ閾値PtはPd1Lとなる。
【0049】
特性N2に基づいてブレーキ圧カットオフ閾値Ptを設定する場合、車速vが低速側車速閾値va以上かつ高速側車速閾値vb以下の範囲(va≦v≦vb)では、車速vの増加に伴いブレーキ圧カットオフ閾値Ptは直線的に減少する。車速vが低速側車速閾値vaより小さいと、ブレーキ圧カットオフ閾値PtはPn2Hとなり、車速vが高速側車速閾値vbより大きいと、ブレーキ圧カットオフ閾値PtはPn2Lとなる。
同様に、特性D2に基づいてブレーキ圧カットオフ閾値Ptを設定する場合、車速vが低速側車速閾値va以上かつ高速側車速閾値vb以下の範囲(va≦v≦vb)では、車速vの増加に伴いブレーキ圧カットオフ閾値Ptは直線的に減少する。車速vが低速側車速閾値vaより小さいと、ブレーキ圧カットオフ閾値PtはPd2Hとなり、車速vが高速側車速閾値vbより大きいと、ブレーキ圧カットオフ閾値PtはPd2Lとなる。
【0050】
つまり、アクセルペダル12の踏み込み有りの場合では、車速が低いほど高い制動力でクラッチ18,19が解放され、車速が高いほど低い制動力でクラッチ18,19が解放されるようにクラッチカットオフ条件が定められている。
【0051】
このような制御により、たとえば、アプローチ中期でバケット112を上昇させるためにアクセルペダル12を最大限に踏み込みつつ、ホイールローダ100を減速させるためにブレーキペダル31を徐々に踏み込んだ場合には、車速が低いほど遅いタイミングでクラッチカットオフを作動させ、車速が高いほど早いタイミングでクラッチカットオフを作動させることができる。
【0052】
なお、速度段が2速に設定されている場合は、速度段が1速に設定されている場合に比べて駆動力が小さいので、ホイールローダ100を減速させる、または、完全に停止させるのに必要な制動力は小さくてよい。そこで、本実施の形態では、速度段が1速に設定されている状態では、速度段が2速に設定されている状態に比べてブレーキ圧カットオフ閾値Ptが大きい(Pn1H>Pn2H,Pn1L>Pn2L,Pd1H>Pd2H,Pd1L>Pd2L)。すなわち、クラッチカットオフ条件は、1速の場合よりも2速の場合の方が、低い制動力でクラッチ18,19が解放されるように定められている。
【0053】
ブレーキ圧Pn1Lは、Pd1Lよりも小さく(Pn1L<Pd1L)、ブレーキ圧Pn1Hは、Pd1Hよりも小さい(Pn1H<Pd1H)。ブレーキ圧Pn2Lは、Pd2Lよりも小さく(Pn2L<Pd2L)、ブレーキ圧Pn2Hは、Pd2Hよりも小さい(Pn2H<Pd2H)。換言すれば、クラッチカットオフ条件は、第1モードでは低い制動力でクラッチ18,19が解放され、第2モードでは高い制動力でクラッチ18,19が解放されるように定められている。
【0054】
図11(a)には、速度段が1速に設定され、かつ、クラッチカットオフの作動モードが第1モードに設定され、かつ、アクセルペダル12が踏み込まれていないときにクラッチカットオフを作動させるブレーキ圧であるブレーキ圧カットオフ閾値Pt=PbN21が破線で示されている。同様に、速度段が1速に設定され、かつ、クラッチカットオフの作動モードが第2モードに設定され、かつ、アクセルペダル12が踏み込まれていないときにクラッチカットオフを作動させるブレーキ圧であるブレーキ圧カットオフ閾値Pt=PbD21が破線で示されている。
【0055】
図11(b)には、速度段が2速に設定され、かつ、クラッチカットオフの作動モードが第1モードに設定され、かつ、アクセルペダル12が踏み込まれていないときにクラッチカットオフを作動させるブレーキ圧であるブレーキ圧カットオフ閾値Pt=PbN22が破線で示されている。同様に、速度段が2速に設定され、かつ、クラッチカットオフの作動モードが第2モードに設定され、かつ、アクセルペダル12が踏み込まれていないときにクラッチカットオフを作動させるブレーキ圧であるブレーキ圧カットオフ閾値Pt=PbD22が破線で示されている。つまり、アクセルペダル12の踏み込み無しの場合では、車速に拘わらず、所定の制動力でクラッチ18,19が解放されるようにクラッチカットオフ条件が定められている。
【0056】
なお、速度段が1速に設定されている状態では、速度段が2速に設定されている状態に比べてブレーキ圧カットオフ閾値Ptが大きい(PbN21>PbN22,PbD21>PbD22)。すなわち、クラッチカットオフ条件は、1速の場合よりも2速の場合の方が、低い制動力でクラッチ18,19が解放されるように定められている。
ブレーキ圧PbN21は、PbD21よりも小さく(PbN21<PbD21)、ブレーキ圧PbN22は、PbD22よりも小さい(PbN22<PbD22)。換言すれば、クラッチカットオフ条件は、第1モードでは低い制動力でクラッチ18,19が解放され、第2モードでは高い制動力でクラッチ18,19が解放されるように定められている。
【0057】
ブレーキ圧PbN21は、Pn1Hよりも小さく、Pn1Lよりも大きい(Pn1L<PbN21<Pn1H)。ブレーキ圧PbD21は、Pd1Hよりも小さく、Pd1Lよりも大きい(Pd1L<PbD21<Pd1H)。ブレーキ圧PbN22は、Pn2Hよりも小さく、Pn2Lよりも大きい(Pn2L<PbN22<Pn2H)。ブレーキ圧PbD22は、Pd2Hよりも小さく、Pd2Lよりも大きい(Pd2L<PbD22<Pd2H)。
【0058】
換言すれば、低速側では、アクセルペダル12の踏み込み有りの場合よりも、アクセルペダル12の踏み込み無しの場合の方が、低い制動力でクラッチ18,19が解放されるようにクラッチカットオフ条件が定められている。一方、高速側では、アクセルペダル12の踏み込み有りの場合よりも、アクセルペダル12の踏み込み無しの場合の方が、高い制動力でクラッチ18,19が解放されるようにクラッチカットオフ条件が定められている。
【0059】
このような条件設定により、たとえば、低速側において、アプローチ中期でアクセルペダル12を戻し操作し、ホイールローダ100を減速させるためにブレーキペダル31を徐々に踏み込んだ場合には、アクセルペダル12の踏み込み操作時に比べて早いタイミングでクラッチカットオフを作動させることができる。一方、高速側ではアクセルペダル12の踏み込み操作時に比べて遅いタイミングでクラッチカットオフを作動させることができる。
【0060】
コントローラ10は、入力される各種の情報と上記特性N1,N2,D1,D2または所定値PbN21,PbN22,PbD21,PbD22とに基づき、クラッチカットオフ条件が満たされたと判定されると、カットオフ信号をトランスミッション制御装置20に出力する。
【0061】
以下、クラッチカットオフ制御を図12〜図15のフローチャートを用いて説明する。
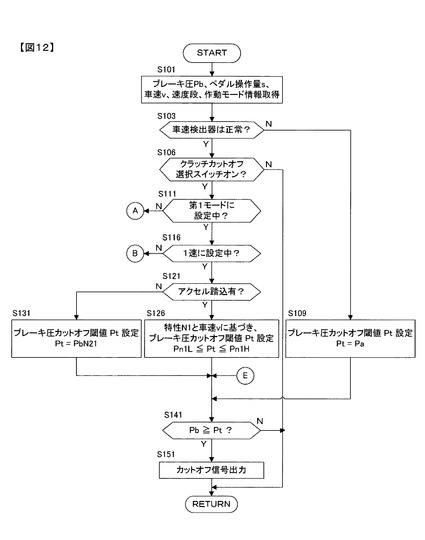
図12〜図15は、一実施の形態のホイールローダ100におけるクラッチ制御処理の動作を示したフローチャートである。ホイールローダ100の不図示のイグニッションスイッチがオンされると、図12〜図15に示す処理を行うプログラムが起動され、コントローラ10で繰り返し実行される。ステップS101において、圧力センサ33で検出されたブレーキ圧Pbの情報、ペダル操作量検出器12aで検出されたペダル操作量sの情報、車速検出器16で検出された車速vの情報、コントローラ10で検出されたトランスミッション3の設定速度段および現在のクラッチカットオフの作動モード(第1/第2モード)の情報を取得して、ステップS103へ進む。
【0062】
ステップS103では、車速検出器16が正常であるか否かを判定する。コントローラ10は、たとえば、設定速度段やエンジン回転数が変化しても車速検出器16からの出力値に変化がほとんどない場合には異常と判定する。ステップS103で肯定判定されると、すなわち、車速検出器16が正常と判定されるとステップS106へ進む。ステップS103で否定判定されると、ステップS109へ進み、ブレーキ圧カットオフ閾値Ptを予めコントローラ10のROMやRAMに記憶されている所定値Paに設定して、ステップS141へ進む。
【0063】
ステップS141では、ステップS101で取得したブレーキ圧Pbが設定されたブレーキ圧カットオフ閾値Pt以上であるか否かを判定する。ステップS141で肯定判定されると、ステップS151へ進み、上述したカットオフ信号をトランスミッション制御装置20に出力してリターンする。
【0064】
車速検出器16が異常と判定されたときに設定されるブレーキ圧カットオフ閾値Pt=Paは、たとえば、速度段が1速かつ作動モードが第1モードに設定されているときには、ブレーキ圧PbN21とする。速度段が2速かつ作動モードが第1モードに設定されているときには、ブレーキ圧PbN22とする。速度段が1速かつ作動モードが第2モードに設定されているときには、ブレーキ圧PbD21とする。速度段が2速かつ作動モードが第2モードに設定されているときには、ブレーキ圧PbD22とする。
【0065】
つまり、ステップS103で、車速検出器16が異常と判定されると、アクセルペダル12の踏み込みの有無、および、車速vに拘わらずに所定の制動力でクラッチカットオフを作動させる。これにより、車速検出器16からの異常な出力値に基づいてクラッチカットオフタイミングが設定されることを防止できる。
【0066】
ステップS106では、クラッチカットオフをするようにクラッチカットオフ選択スイッチ9が選択されているか否かを判定する。ステップS106で肯定判定されると、すなわち、クラッチカットオフをするようにクラッチカットオフ選択スイッチ9が選択されていると判定されるとステップS111へ進み、クラッチカットオフ作動モード切り替えスイッチ36が第1モードに設定されているか否かを判定する。ステップS111で肯定判定されると、すなわち、クラッチカットオフ作動モード切り替えスイッチ36が第1モードに設定されていると判定されるとステップS116へ進み、トランスミッション3の設定速度段が1速であるか否かを判定する。
【0067】
ステップS116で肯定判定されると、すなわち、トランスミッション3の設定速度段が1速であると判定されるとステップS121へ進み、アクセルペダル12の踏み込みの有無を判定する。ステップS121で肯定判定されると、すなわち、アクセルペダル12の踏み込み有りと判定されると、ステップS126へ進み、特性N1(図11(a)参照)を記憶したテーブルを参照して、ステップS101で取得した車速vに基づきブレーキ圧カットオフ閾値Ptを設定する(Pn1L≦Pt≦Pn1H)。ステップS121で否定判定されると、すなわち、アクセルペダル12の踏み込み無しと判定されると、ステップS131へ進み、ブレーキ圧カットオフ閾値PtをPbN21に設定する(Pt=PbN21)。ステップS126またはステップS131でブレーキ圧カットオフ閾値Ptが設定されると、ステップS141へ進んで上述した処理が実行される。
【0068】
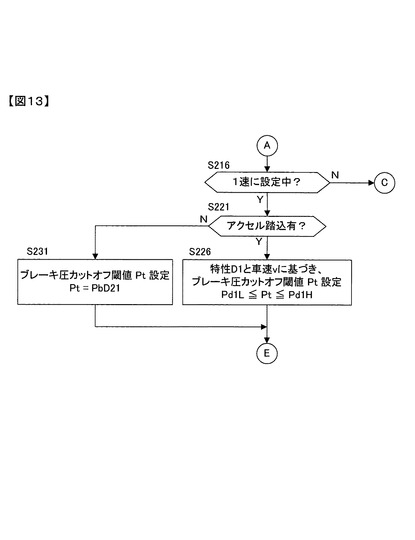
ステップS111で否定判定されると図13に示すステップS216へ進み、トランスミッション3の設定速度段が1速であるか否かを判定する。ステップS216で肯定判定されると、すなわち、トランスミッション3の設定速度段が1速であると判定されるとステップS221へ進み、アクセルペダル12の踏み込みの有無を判定する。ステップS221で肯定判定されると、すなわち、アクセルペダル12の踏み込み有りと判定されると、ステップS226へ進み、特性D1(図11(a)参照)を記憶したテーブルを参照して、ステップS101で取得した車速vに基づきブレーキ圧カットオフ閾値Ptを設定する(Pd1L≦Pt≦Pd1H)。ステップS221で否定判定されると、すなわち、アクセルペダル12の踏み込み無しと判定されると、ステップS231へ進み、ブレーキ圧カットオフ閾値PtをPbD21に設定する(Pt=PbD21)。ステップS226またはステップS231でブレーキ圧カットオフ閾値Ptが設定されると、図12に示すステップS141へ進んで上述した処理が実行される。
【0069】
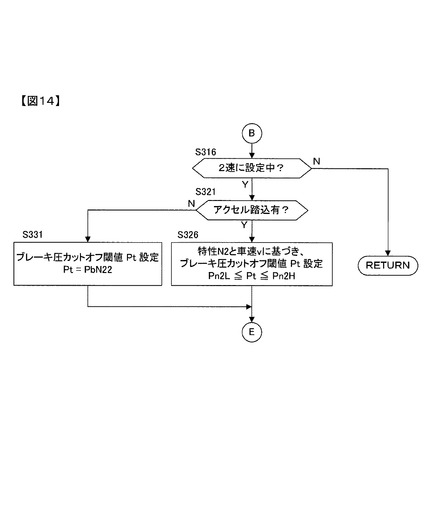
ステップS116で否定判定されると図14に示すステップS316へ進み、トランスミッション3の設定速度段が2速であるか否かを判定する。ステップS316で肯定判定されると、すなわち、トランスミッション3の設定速度段が2速であると判定されるとステップS321へ進み、アクセルペダル12の踏み込みの有無を判定する。ステップS321で肯定判定されると、すなわち、アクセルペダル12の踏み込み有りと判定されると、ステップS326へ進み、特性N2(図11(b)参照)を記憶したテーブルを参照して、ステップS101で取得した車速vに基づきブレーキ圧カットオフ閾値Ptを設定する(Pn2L≦Pt≦Pn2H)。ステップS321で否定判定されると、すなわち、アクセルペダル12の踏み込み無しと判定されると、ステップS331へ進み、ブレーキ圧カットオフ閾値PtをPbN22に設定する(Pt=PbN22)。ステップS326またはステップS331でブレーキ圧カットオフ閾値Ptが設定されると、図12に示すステップS141へ進んで上述した処理が実行される。
【0070】
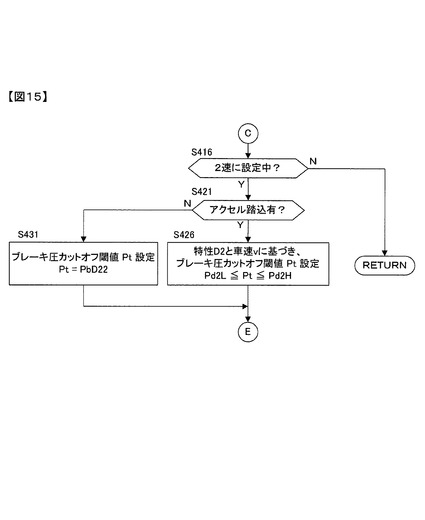
図13に示すステップS216で否定判定されると図15に示すステップS416へ進み、トランスミッション3の設定速度段が2速であるか否かを判定する。ステップS416で肯定判定されると、すなわち、トランスミッション3の設定速度段が2速であると判定されるとステップS421へ進み、アクセルペダル12の踏み込みの有無を判定する。ステップS421で肯定判定されると、すなわち、アクセルペダル12の踏み込み有りと判定されると、ステップS426へ進み、特性D2(図11(b)参照)を記憶したテーブルを参照して、ステップS101で取得した車速vに基づきブレーキ圧カットオフ閾値Ptを設定する(Pd2L≦Pt≦Pd2H)。ステップS421で否定判定されると、すなわち、アクセルペダル12の踏み込み無しと判定されると、ステップS431へ進み、ブレーキ圧カットオフ閾値PtをPbD22に設定する(Pt=PbD22)。ステップS426またはステップS431でブレーキ圧カットオフ閾値Ptが設定されると、図12に示すステップS141へ進んで上述した処理が実行される。
【0071】
ステップS106,S141,S316またはS416で否定判定されると、リターンする。
【0072】
以上説明した本実施の形態によれば、以下のような作用効果を奏することができる。
(1)コントローラ10は、アクセルペダル12の踏み込みの有無に基づいて、クラッチカットオフを作動させるブレーキ圧カットオフ閾値Ptを設定するようにした。したがって、アクセルペダル12を踏み込み操作した状態と、アクセルペダル12を戻し操作した状態とで、それぞれ適切なタイミングでクラッチ18,19を解放することができる。
【0073】
(2)コントローラ10は、アクセルペダル12の踏み込み有りの場合には、車速vが高いほどブレーキ圧カットオフ閾値Ptを低く、車速が低いほどブレーキ圧カットオフ閾値Ptを高く設定した(図11の特性N1,N2,D1,D2参照)。
【0074】
これにより、バケット112を上昇させるためにアクセルペダル12を最大限に踏み込みつつ、ブレーキペダル31を徐々に踏み込んで減速しながらダンプトラックへアプローチするなどの作業状態において、駆動力の大きさに対応した制動力によりクラッチカットオフの作動直前の車輪へ伝達される駆動力を十分に抑制することができる。その結果、大きな駆動力が残った状態でクラッチカットオフが作動することに起因したピッチングを誘発することなく、ホイールローダ100を滑らかに減速させ、停止させることができる。
【0075】
(3)コントローラ10は、低速側では、アクセルペダル12の踏み込み有りの場合よりもアクセルペダル12の踏み込み無しの場合の方が、クラッチカットオフを作動させるブレーキ圧カットオフ閾値Ptを低く設定するようにした。アクセルペダル12の踏み込み無しの場合、すなわち駆動力が小さく、エンジンブレーキにより減速している状態にあるときには、低い制動力でクラッチカットオフを作動させてもピッチングを誘発することなく、車両を滑らかに停止させることができる。一方、(2)で記したように、アクセルペダル12の踏み込み有りの場合における低速走行状態、すなわち駆動力が大きい走行状態では、高い制動力でクラッチカットオフを行う前に車輪へ伝達される駆動力を十分に抑えるように、ホイールローダ100を減速させることができる。その結果、大きな駆動力が残った状態でクラッチカットオフが作動することに起因したピッチングを誘発することなく、ホイールローダ100を滑らかに減速させ、停止させることができる。
【0076】
(4)コントローラ10は、1速の場合よりも2速の場合の方がブレーキ圧カットオフ閾値Ptを低く設定した(図11(a)および(b)参照)。これにより、たとえば、ホイールローダ100が大きな駆動力を必要とする急な傾斜路での作業等を1速で行っている場合と、平地でのバケット112の上昇を伴う土砂等の積込み作業等を2速で行っている場合とで、それぞれに適切なタイミングでクラッチ18,19を解放することができる。
【0077】
(5)コントローラ10は、クラッチカットオフ作動モード切り替えスイッチ36により第1モードが選択されると、クラッチ18,19を低い制動力で解放し、クラッチカットオフ作動モード切り替えスイッチ36により第2モードが選択されると、クラッチ18,19を高い制動力で解放するように、ブレーキ圧カットオフ閾値Ptを設定した。これにより、走行路の傾斜角度の違いやバケット112の積載量の違い、作業内容の違いなど、種々の走行/作業状況に応じてオペレータがクラッチ18,19を解放するタイミングを変更できるため、作業効率の向上を図ることができる。
【0078】
(6)上記(1)〜(5)のとおり、コントローラ10は、アクセルペダル12の踏み込みの有無、車速、制動力、トランスミッション3の設定速度段、クラッチカットオフの作動モード(第1モードまたは第2モード)の情報に基づいて、クラッチカットオフ条件を満たすと判定した場合に、クラッチ18,19を解放するようにクラッチ18,19の係合/解放を制御する。これにより、ホイールローダ100の平地での土砂の積み込み作業、および傾斜路での作業などの種々の走行/作業状況に応じた適切なタイミングでクラッチカットオフが作動するのでホイールローダ100の動きが滑らかになる。
【0079】
(7)上記(1)〜(5)のとおり、コントローラ10は、アクセルペダル12の踏み込みの有無、車速、制動力およびトランスミッション3の設定速度段の情報に基づいて、ブレーキ圧カットオフ閾値Ptを自動的に設定した。これにより、作業効率の向上とオペレータの疲労軽減を図ることができる。
【0080】
これに対して、ブレーキ圧カットオフ閾値Ptをオペレータが無段階または多段階で任意に調整できるクラッチ制御装置を備えたホイールローダでは、オペレータが走行/作業状況に応じて頻繁に調整する必要性が生じ、オペレータに煩わしさを感じさせてしまう。さらに、状況に応じてどれを選択したら最適なのかを判断することが困難であり、運転しながら最適なブレーキ圧カットオフ閾値Ptを手動で設定することは熟練した技量が必要となる。
【0081】
(8)コントローラ10で車速検出器16の異常が判定されると、アクセルペダル12の踏み込みの有無、および、ホイールローダ100の車速vに拘わらずに、ブレーキ圧カットオフ閾値Ptを所定値に設定する。これにより、車速検出器16からの異常な出力値に基づいてブレーキ圧カットオフ閾値Ptが設定されることを防止できる。
【0082】
次のような変形も本発明の範囲内であり、変形例の一つ、もしくは複数を上述の実施形態と組み合わせることも可能である。
[変形例]
(1)上述の説明では、ホイールローダ100の制動力を検出する制動力検出手段を、ブレーキ圧Pbを検出する圧力センサ33としたが、本発明はこれに限定されない。圧力センサ33に代えて、たとえばブレーキペダル31の操作量(ペダルストロークまたはペダル角度)を検出するペダル操作量検出器31aや、ブレーキペダル31の踏み込み力を検出する検出器(不図示)を制動力検出手段とすることができる。すなわち、ブレーキの作動状態(制動力の大きさ)を直接的にもしくは間接的に検出できる検出手段であればよい。換言すれば、クラッチカットオフ条件として考慮するパラメータはブレーキ圧Pbに限られない。
【0083】
(2)上述の説明では、ペダル操作量検出器12aからコントローラ10に入力されるアクセルペダル12のペダル操作量sに基づいて、コントローラ10がアクセルペダル12の踏み込みの有無を判定したが、本発明はこれに限定されない。ペダル操作量sに代えて、たとえばエンジン1の実回転数を検出して、エンジン実回転数に基づきアクセルペダル12の踏み込みの有無をコントローラ10で判定してもよい。アクセル開度、または、エンジン目標回転数に基づいて、アクセルペダル12の踏み込みの有無を判定してもよい。
【0084】
(3)上述の説明では、クラッチカットオフ作動モード切り替えスイッチ36の操作によってクラッチカットオフ条件を第1モードまたは第2モードに設定できるように構成したが、本発明はこれに限定されない。たとえば、クラッチカットオフ作動モードを3つのモードとして、クラッチカットオフのタイミングを「早い」第1モードと「遅い」第2モードと「その中間」第3モードのいずれかから選択できるようにしてもよい。すなわち、クラッチカットオフ作動モードは、少なくとも2モード以上であって、クラッチカットオフのタイミングを少なくとも「早い」と「遅い」のいずれかに設定できればよい。
【0085】
(4)上述の説明では、クラッチカットオフを行う場合には、前後進用のクラッチ18,19をカットオフするためのカットオフ信号をコントローラ10がトランスミッション制御装置20に出力するように構成しているが、本発明はこれに限定されない。たとえば、クラッチカットオフを行う時点で係合している方のクラッチのみをカットオフするようにカットオフ信号をコントローラ10がトランスミッション制御装置20に出力するように構成してもよい。すなわち、ホイールローダ100が前進しているときにクラッチカットオフを行う場合には、前進用のクラッチ18だけをカットオフするようにカットオフ信号をコントローラ10がトランスミッション制御装置20に出力するように構成してもよい。
【0086】
(5)上述の説明では、トランスミッション3における選択可能な速度段の段数は4段であったが、本発明はこれに限定されず、3段でもよく、5段以上であってもよい。
(6)上述の説明では、トランスミッション3が低速度段である1速または2速に設定されている場合にのみ、クラッチカットオフ条件を満たすか否かの判定を行ったが、本発明はこれに限定されない。たとえば、速度段が5段ある場合には、低速度段である1速〜3速に設定されている場合にのみ、クラッチカットオフ条件を満たすか否かの判定を行ってもよい。この場合、クラッチカットオフ条件は、1速の場合よりも2速の場合の方が、低い制動力でクラッチ18,19が解放され、2速の場合よりも3速の場合の方が、低い制動力でクラッチ18,19が解放されるように定められている。
【0087】
(7)上述の説明では、アクセルペダル12の踏み込みの有無、車速、制動力、トランスミッション3の設定速度段、クラッチカットオフの作動モード(第1モードまたは第2モード)の情報に基づいて、クラッチカットオフ条件が成立しているか否かを判定したが、本発明はこれに限定されない。
【0088】
トランスミッション3の設定速度段およびクラッチカットオフの作動モードの情報のいずれかを加味せずに、クラッチカットオフ条件が成立しているか否かを判定してもよい。トランスミッション3の設定速度段およびクラッチカットオフの作動モードの情報のいずれも加味せずに、アクセルペダル12の踏み込みの有無、車速、および、制動力の情報に基づいて、クラッチカットオフ条件が成立しているか否かを判定してもよい。
【0089】
車速、トランスミッション3の設定速度段およびクラッチカットオフの作動モードの情報のいずれも加味せずに、アクセルペダル12の踏み込みの有無および制動力の情報に基づいて、クラッチカットオフ条件が成立しているか否かを判定してもよい。この場合、アクセルペダル12の踏み込み有りの場合よりも、アクセルペダル12の踏み込み無しの場合の方が、低い制動力でクラッチ18,19が解放されるようにクラッチカットオフ条件を定めることができる。さらに、上記実施の形態と同様に、アクセルペダル12の踏み込みの有無および制動力の情報に、トランスミッション3の設定速度段も加味してクラッチカットオフ条件が成立しているか否かを判定してもよい。
【0090】
アクセルペダル12の踏み込みの有無、トランスミッション3の設定速度段およびクラッチカットオフの作動モードの情報のいずれも加味せずに、車速および制動力の情報に基づいて、クラッチカットオフ条件が成立しているか否かを判定してもよい。この場合、上記実施の形態と同様に、車速が高いほど、低い制動力でクラッチ18,19が解放されるようにクラッチカットオフ条件を定めることができる。さらに、上記実施の形態と同様に、車速および制動力の情報に、トランスミッション3の設定速度段も加味してクラッチカットオフ条件が成立しているか否かを判定してもよい。
【0091】
(8)上述の説明では、車速検出器16の異常時にブレーキ圧カットオフ閾値Ptを、アクセルペダル12の踏み込み無しの場合と同様に、設定された作動モードおよび設定速度段に応じて、PbN21,PbD21,PbN22,PbD22のいずれかに設定したが本発明はこれに限定されない。車速検出器16の異常時にブレーキ圧カットオフ閾値Ptは、設定された作動モードおよび設定速度段に応じて、アクセルペダル12の踏み込み有りの条件範囲内で設定することができる。
【0092】
(9)上述の説明では、アクセルペダル12の踏み込み無しの場合に、設定された作動モードおよび設定速度段毎に一定の値としたが、本発明はこれに限定されない。たとえば、高速側ではブレーキ圧カットオフ閾値Ptを低速側に比べて高く設定してもよい。この場合、高速走行状態では、クラッチカットオフを行うタイミングをより遅くすることで、エンジンブレーキを効果的に発揮させ、ブレーキ部5aに大きな負担をかけることなく減速させることができる。
【0093】
(10)上述の説明では、特性N1,N2,D1,D2は車速va〜vbの範囲において、車速vの増加に伴い直線的に減少するようにブレーキ圧カットオフ閾値Ptを設定するものであったが、本発明はこれに限定されない。車速vの増加に伴いブレーキ圧カットオフ閾値Ptが二次曲線的に減少する関係であってもよいし、車速vの増加に伴いブレーキ圧カットオフ閾値Ptが段階的に減少する関係であってもよい。
【0094】
(11)上述の説明では、作業車両の一例としてホイールローダ100を例に説明したが、本発明はこれに限定されず、たとえば、フォークリフト、テレハンドラー、リフトトラック等、他の作業車両であってもよい。
【0095】
本発明は、上述した実施の形態に限定されるものでなく、発明の要旨を逸脱しない範囲で自由に変更、改良が可能である。
【符号の説明】
【0096】
1 エンジン、2 トルクコンバータ(トルコン)、3 トランスミッション、4 プロペラシャフト、5 アクスル、5a ブレーキ部、7 スイッチ、8 シフトスイッチ、9 クラッチカットオフ選択スイッチ、10 コントローラ、12 アクセルペダル、12a ペダル操作量検出器、14 回転数検出器、15 回転数検出器、16 車速検出器、17 クラッチカットオフ弁、18 前進クラッチ、19 後進クラッチ、20 トランスミッション制御装置、21 入力軸、22 出力軸、30 油圧源、31 ブレーキペダル、31a ペダル操作量検出器、32 ブレーキバルブ、32a ばね、33 圧力センサ、35 変速手段切り替え装置、36 スイッチ、100 ホイールローダ、101 センタピン、110 前部車体、111 アーム、112 バケット、113 タイヤ、114 アームシリンダ、115 バケットシリンダ、120 後部車体、121 運転室、122 エンジン室、123 タイヤ
【技術分野】
【0001】
本発明は、作業車両のクラッチ制御装置に関する。
【背景技術】
【0002】
車速とブレーキペダルの操作による制動力の大きさに応じて、クラッチを解放して走行駆動力の車輪への伝達を遮断するようにしたクラッチ制御装置が知られている(特許文献1参照)。
【0003】
特許文献1に記載のクラッチ制御装置では、低速走行時にクラッチが解放される制動力よりも、高速走行時にクラッチが解放される制動力の方が大きい。したがって、高速走行時では、低速走行時にクラッチが解放されるブレーキペダル操作量であってもクラッチが解放されず、エンジンブレーキを効果的に発揮させてサービスブレーキに大きな負担をかけることなく車両を減速できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−299732号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載のクラッチ制御装置では、作業車両の走行状態を車速が低速か高速かで判断し、低速走行時と高速走行時とのそれぞれでクラッチが解放されるブレーキ圧カットオフ閾値が設定されている。特許文献1に記載のクラッチ制御装置では、作業車両の状態が十分に考慮されているとはいえず、作業車両の状態によっては、クラッチの解放タイミングが適切ではなくなってしまう。
【課題を解決するための手段】
【0006】
請求項1に係る発明は、アクセルペダルの踏み込みの有無を判定するアクセルペダル踏込判定手段と、作業車両の車速を検出する車速検出手段と、作業車両の制動力を検出する制動力検出手段と、アクセルペダル踏込判定手段によって判定されるアクセルペダルの踏み込みの有無、車速検出手段によって検出される作業車両の車速、および、制動力検出手段によって検出される作業車両の制動力に基づいて、クラッチカットオフ条件が成立しているか否かを判定する判定手段と、判定手段によりクラッチカットオフ条件が成立していると判定された場合に、クラッチを解放するようにクラッチの係合/解放を制御するクラッチ制御手段とを備えることを特徴とする作業車両のクラッチ制御装置である。
請求項2に係る発明は、請求項1に記載の作業車両のクラッチ制御装置において、クラッチカットオフ条件は、低速側では、アクセルペダルの踏み込み有りの場合よりも、アクセルペダルの踏み込み無しの場合の方が、低い制動力でクラッチが解放されるように定められていることを特徴とする。
請求項3に係る発明は、請求項1または2に記載の作業車両のクラッチ制御装置において、クラッチカットオフ条件は、アクセルペダルの踏み込み有りの場合では、車速が高いほど、低い制動力でクラッチが解放され、アクセルペダルの踏み込み無しの場合では、車速に拘わらず、所定の制動力でクラッチが解放されるように定められていることを特徴とする。
請求項4に係る発明は、請求項1ないし3のいずれか1項に記載の作業車両のクラッチ制御装置において、トランスミッションの設定速度段を検出する速度段検出手段をさらに備え、判定手段は、速度段検出手段によって検出されるトランスミッションの設定速度段も加味してクラッチカットオフ条件が成立しているか否かを判定し、クラッチカットオフ条件は、少なくとも1速の場合よりも2速の場合の方が、低い制動力でクラッチが解放されるように定められていることを特徴とする。
請求項5に係る発明は、アクセルペダルの踏み込みの有無を判定するアクセルペダル踏込判定手段と、作業車両の制動力を検出する制動力検出手段と、アクセルペダル踏込判定手段によって判定されるアクセルペダルの踏み込みの有無、および、制動力検出手段によって検出される作業車両の制動力に基づいて、クラッチカットオフ条件が成立しているか否かを判定する判定手段と、判定手段によりクラッチカットオフ条件が成立していると判定された場合に、クラッチを解放するようにクラッチの係合/解放を制御するクラッチ制御手段とを備えることを特徴とする作業車両のクラッチ制御装置である。
請求項6に係る発明は、請求項5に記載の作業車両のクラッチ制御装置において、クラッチカットオフ条件は、アクセルペダルの踏み込み有りの場合よりも、アクセルペダルの踏み込み無しの場合の方が、低い制動力でクラッチが解放されるように定められていることを特徴とする。
請求項7に係る発明は、請求項5または6に記載の作業車両のクラッチ制御装置において、トランスミッションの設定速度段を検出する速度段検出手段をさらに備え、判定手段は、速度段検出手段によって検出されるトランスミッションの設定速度段も加味してクラッチカットオフ条件が成立しているか否かを判定し、クラッチカットオフ条件は、少なくとも1速の場合よりも2速の場合の方が、低い制動力でクラッチが解放されるように定められていることを特徴とする。
請求項8に係る発明は、作業車両の車速を検出する車速検出手段と、作業車両の制動力を検出する制動力検出手段と、車速検出手段によって検出される作業車両の車速、および、制動力検出手段によって検出される作業車両の制動力に基づいて、クラッチカットオフ条件が成立しているか否かを判定する判定手段と、判定手段によりクラッチカットオフ条件が成立していると判定された場合に、クラッチを解放するようにクラッチの係合/解放を制御するクラッチ制御手段とを備え、クラッチカットオフ条件は、車速が高いほど、低い制動力でクラッチが解放されるように定められていることを特徴とする作業車両のクラッチ制御装置である。
請求項9に係る発明は、請求項8に記載の作業車両のクラッチ制御装置において、トランスミッションの設定速度段を検出する速度段検出手段をさらに備え、判定手段は、速度段検出手段によって検出されるトランスミッションの設定速度段も加味してクラッチカットオフ条件が成立しているか否かを判定し、クラッチカットオフ条件は、少なくとも1速の場合よりも2速の場合の方が、低い制動力でクラッチが解放されるように定められていることを特徴とする。
請求項10に係る発明は、請求項1ないし9のいずれか1項に記載の作業車両のクラッチ制御装置において、車速検出手段の異常を判定する異常判定手段をさらに備え、異常判定手段により車速検出手段の異常が判定されたとき、アクセルペダル踏込判定手段によって判定されるアクセルペダルの踏み込みの有無、および、車速検出手段によって検出される作業車両の車速に拘わらずに、所定の制動力でクラッチが解放されることを特徴とする。
請求項11に係る発明は、請求項1ないし10のいずれか1項に記載の作業車両のクラッチ制御装置において、少なくとも、クラッチを低い制動力で解放する第1モードと、クラッチを高い制動力で解放する第2モードとの間で、クラッチカットオフ条件を選択可能なモード切替手段をさらに備えていることを特徴とする。
請求項12に係る発明は、請求項1ないし11のいずれか1項に記載の作業車両のクラッチ制御装置において、複数の速度段を有するトランスミッションを備え、判定手段は、トランスミッションが低速度段に設定されている場合にのみ、クラッチカットオフ条件が成立しているか否かを判定することを特徴とする。
【発明の効果】
【0007】
本発明によれば、作業車両の状態に対応したタイミングでクラッチを解放して、作業車両を滑らかに停止させることができる。
【図面の簡単な説明】
【0008】
【図1】作業車両の一例であるホイールローダの側面図。
【図2】ホイールローダの制御系の概略構成を示す図。
【図3】速度段毎の車速と走行駆動力との関係を示す図。
【図4】トランスミッションの概略構成を示す図。
【図5】トルコン速度比と速度段との関係を示す図。
【図6】ブレーキペダルの操作量とブレーキ圧の関係を示す図。
【図7】アクセルペダルの操作量と目標エンジン回転速度の関係を示す図。
【図8】Vシェープローディングについて示す図。
【図9】土砂等のダンプトラックへの積み込みの際のホイールローダの状態を説明する図。
【図10】傾斜路において作業する際のホイールローダの状態を説明する図。
【図11】クラッチカットオフ条件を示す図。
【図12】本発明の一実施の形態によるホイールローダにおけるクラッチ制御処理の動作を示したフローチャート。
【図13】本発明の一実施の形態によるホイールローダにおけるクラッチ制御処理の動作を示したフローチャート。
【図14】本発明の一実施の形態によるホイールローダにおけるクラッチ制御処理の動作を示したフローチャート。
【図15】本発明の一実施の形態によるホイールローダにおけるクラッチ制御処理の動作を示したフローチャート。
【発明を実施するための形態】
【0009】
以下、図面を参照して、本発明に係る作業車両のクラッチ制御装置の一実施の形態について説明する。図1は、一実施の形態に係るクラッチ制御装置が適用される作業車両の一例であるホイールローダの側面図である。ホイールローダ100は、アーム111、作業機装置であるバケット112、タイヤ113等を有する前部車体110と、運転室121、エンジン室122、タイヤ123等を有する後部車体120とで構成される。アーム111はアームシリンダ114の駆動により上下方向に回動(俯仰動)し、バケット112はバケットシリンダ115の駆動により上下方向に回動(クラウドまたはダンプ)する。前部車体110と後部車体120はセンタピン101により互いに回動自在に連結され、ステアリングシリンダ(不図示)の伸縮により後部車体120に対し前部車体110が左右に屈折する。
【0010】
図2は、ホイールローダ100の制御系の概略構成を示す図である。エンジン1の出力軸にはトルクコンバータ2(以下、トルコンと呼ぶ)の入力軸21(図4参照)が連結され、トルコン2の出力軸22(図4参照)はトランスミッション3に連結されている。トルコン2は周知のインペラ,タービン,ステータからなる流体クラッチであり、エンジン1の回転はトルコン2を介してトランスミッション3に伝達される。トランスミッション3は、後述するようにその速度段を1速〜4速に切り替える液圧クラッチを有し、トルコン2の出力軸22の回転はトランスミッション3で変速される。変速後の回転が、プロペラシャフト4,アクスル5を介してタイヤ113,123に伝達されて、ホイールローダ100が走行する。
【0011】
アクスル5には、ホイールローダ100を減速、停止させるためのブレーキ部5aが設けられている。ブレーキ部5aは、ブレーキバルブ32を介してブレーキ油が供給されると、作動油の圧力に応じた制動力を発生させる。ブレーキバルブ32は、作動油の油圧源30から供給される圧油をばね32aの圧縮力に応じた圧力に減圧する減圧弁である。運転室121内に設けられたブレーキペダル31がオペレータによって踏み込まれて、ブレーキペダル31の踏み込み力に応じてばね32aが圧縮されると、ブレーキバルブ32は、作動油の油圧源30から供給される圧油をブレーキペダル31の踏み込み力に応じた圧力となるように減圧する。ブレーキバルブ32は、ばね32aの圧縮力(すなわちブレーキペダル31の踏み込み力)が高くなるほど、高い圧力の作動油をブレーキ部5aに供給するように、作動油の圧力を減圧する。34は作動油タンクである。
【0012】
なお、不図示の作業用油圧ポンプはエンジン1により駆動され、この油圧ポンプからの吐出油は不図示の方向制御弁を介して作業用アクチュエータ(たとえばアームシリンダ114)に導かれる。方向制御弁は不図示の操作レバーの操作により駆動され、操作レバーの操作量に応じてアクチュエータが駆動される。
【0013】
トルコン2は入力トルクに対して出力トルクを増大させる機能、つまりトルク比を1以上とする機能を有する。トルク比は、トルコン2の入力軸21の回転数Niと出力軸22の回転数Ntの比であるトルコン速度比e(=Nt/Ni)の増加に伴い小さくなる。たとえばエンジン回転数が一定状態で走行中に走行負荷が大きくなると、トルコン2の出力軸22の回転数Ntが低下、つまり車速が低下し、トルコン速度比eが小さくなる。このとき、トルク比は増加するため、より大きな走行駆動力(牽引力)で車両走行可能となる。
【0014】
トランスミッション3は、トルコン出力を1速〜4速のいずれかに変速する。速度段毎の車速と走行駆動力との関係は図3に示すとおりであり、同一速度段で比較すると車速が遅いと走行駆動力は大きく(低速高トルク)、車速が速いと走行駆動力は小さくなる(高速低トルク)。また、速度段が小さいほど、同一車速において大きな走行駆動力を得ることができる。
【0015】
トランスミッション3の構成について説明する。図4は、トランスミッション3の概略構成を示す図である。トランスミッション3は、複数のクラッチシャフトSH1〜SH3、アウトプットシャフトSH4、複数のギヤG1〜G13、前進用の油圧クラッチ(前進クラッチ)18、後進用の油圧クラッチ(後進クラッチ)19、1速〜4速用の油圧クラッチC1〜C4を備える。各油圧クラッチ18,19,C1〜C4は、トランスミッション制御装置20を介して供給される圧油(クラッチ圧)により係合動作または解放動作を行う。すなわち油圧クラッチ18,19,C1〜C4に供給されるクラッチ圧が増加するとクラッチ18,19,C1〜C4は係合動作を行い、クラッチ圧が減少すると解放動作を行う。
【0016】
トルコン2の出力軸22は、クラッチシャフトSH1に連結され、アウトプットシャフトSH4の両端部は、図2のプロペラシャフト4を介して車両前後のアクスル5に連結されている。図4では、前進クラッチ18と1速用クラッチC1とが係合状態で、他のクラッチ19,C2〜C4が解放状態にある。この場合には、ギヤG1とクラッチシャフトSH1が一体になって回転するとともに、ギヤG6とクラッチシャフトSH2が一体になって回転する。
【0017】
このときエンジン1の出力トルクは、図4に太線で示すようにトルコン2の入力軸21、出力軸22、クラッチシャフトSH1、前進クラッチ18、ギヤG1,G3,G5,G6、1速用クラッチC1、クラッチシャフトSH2、ギヤG8,G12を介してアウトプットシャフトSH4に伝達される。これにより1速走行が可能となる。
【0018】
1速から2速に変速する場合には、トランスミッション制御装置20を介して供給されるクラッチ圧により1速用クラッチC1を解放状態とし、2速用クラッチC2を係合状態とする。これによりエンジン1の出力トルクは、トルコン2の入力軸21、出力軸22、クラッチシャフトSH1、前進クラッチ18、ギヤG1,G3,G7、2速用クラッチC2、クラッチシャフトSH2、ギヤG8,G12を介してアウトプットシャフトSH4に伝達され、2速走行が可能となる。1速から2速以外の変速、すなわち2速から3速、3速から4速、4速から3速、3速から2速、2速から1速への変速も同様にクラッチC1〜C4を制御することで行われる。
【0019】
自動変速制御には、トルコン速度比eが所定値に達すると変速するトルコン速度比基準制御と、車速が所定値に達すると変速する車速基準制御の2つの方式がある。本実施の形態では、トルコン速度比基準制御によりトランスミッション3の速度段を制御する。
【0020】
図5は、トルコン速度比eと速度段の関係を示す図である。走行負荷が低くなり、トルコン速度比eが増加してトルコン速度比eが所定値eu以上になると、速度段は1段シフトアップする。これによりトルコン速度比eがe1(ed<e1<eu)となる。反対に走行負荷が高くなり、トルコン速度比eが低下してトルコン速度比eが所定値ed以下になると、速度段は1段シフトダウンする。これによりトルコン速度比eがe2(ed<e2<eu)となる。所定値eu,edは、予めコントローラ10に設定されている。コントローラ10は、トランスミッション3の現在設定されている速度段(以下、設定速度段と称す)を検出する。
【0021】
図2に示すコントローラ10は、CPU,ROM,RAM,その他の周辺回路などを有する演算処理装置を含んで構成される。コントローラ10には、アクセルペダル12のペダル操作量s(ペダルストロークまたはペダル角度)を検出するペダル操作量検出器12aと、トルコン2の入力軸21の回転数Niを検出する回転数検出器14と、トルコン2の出力軸22の回転数Ntを検出する回転数検出器15とが接続されている。コントローラ10にはまた、プロペラシャフト4の回転速度を検出する車速検出器16が接続され、コントローラ10は、車速検出器16からの出力値に基づきホイールローダ100の車速vを演算する。
【0022】
コントローラ10は、ペダル操作量検出器12aからのペダル操作量sが所定値s1(図7参照)以上である場合には、アクセルペダル12の踏み込み有りと判定し、ペダル操作量検出器12aからのペダル操作量sが所定値s1未満である場合には、アクセルペダル12の踏み込み無しと判定する。所定値s1は、目標エンジン回転速度Nsをローアイドル回転速度(たとえば、1200rpm)から上昇させる閾値としても設定されており(図7参照)、予めコントローラ10のROMまたはRAMに記憶されている。
【0023】
図2に示すように、コントローラ10には、車両の前後進を指令する前後進切り替えスイッチ7と、クラッチカットオフ(後述)を行うか否かを選択するクラッチカットオフ選択スイッチ9と、トランスミッション3における変速を自動で行うか手動で行うかを切り替える変速手段切り替え装置35とが接続されている。コントローラ10にはまた、手動変速時における速度段または自動変速時における1速〜4速の間で最大速度段を指令するシフトスイッチ8と、後述するように前後進用のクラッチ18,19をカットオフする際の条件を切り替えるクラッチカットオフ作動モード切り替えスイッチ36とが接続されている。コントローラ10は、現在の作動モード(第1モード/第2モード)を検出する。
【0024】
コントローラ10には、ブレーキペダル31の操作量(ペダルストロークまたはペダル角度)を検出するペダル操作量検出器31aと、ブレーキ部5aに供給される作動油の圧力を検出する圧力センサ33とが接続されている。図6は、ブレーキペダル31の操作量とブレーキ圧Pbの関係を示す図である。ブレーキペダル31の操作量が大きくなるとブレーキ圧Pbは大きくなり、ペダル操作量に応じてホイールローダ100に制動力が作用する。
【0025】
コントローラ10は、ペダル操作量検出器12aで検出したアクセルペダル12の操作量に応じてエンジン1の回転速度(回転数)を制御する。図7は、アクセルペダル12の操作量sと目標エンジン回転速度Nsの関係を示す図である。アクセルペダル12の操作量sが大きくなると目標エンジン回転速度Nsは大きくなり、ペダル最大踏み込み時の目標エンジン回転速度Nsは定格回転速度となる。コントローラ10はこの目標エンジン回転速度Nsに対応した制御信号をエンジン制御部(不図示)に出力し、エンジン1の実回転速度が目標エンジン回転速度Nsとなるように制御する。オペレータは、車速を増加または走行駆動力を増加させたい場合に、アクセルペダル12の操作量sを増やし、エンジン回転速度を大きくする。
【0026】
ホイールローダ100でダンプトラックに土砂等を積み込む作業を行う場合などには、オペレータは、ダンプトラックへ接近する際にブレーキペダル31を踏み込んでホイールローダ100を減速させながら、バケット112を上げるためにアクセルペダル12も踏み込んでエンジン1の回転数を高回転で維持するようにしている。コントローラ10は、クラッチカットオフを作動するようにクラッチカットオフ選択スイッチ9が選択されている場合には、後述するクラッチカットオフ条件が満たされたと判定されると、クラッチ18,19を解放状態(カットオフ)とするための制御信号(カットオフ信号)をトランスミッション制御装置20に出力する。トランスミッション制御装置20では、カットオフ信号を受信すると、トランスミッション制御装置20に設けられているクラッチカットオフ弁17(図2参照)がクラッチ18,19を作動させるためのクラッチ圧を減少させる。これにより、クラッチ18,19が解放され、走行駆動力(以下、単に駆動力と呼ぶ)の伝達が遮断される。クラッチ18,19を解放することを、クラッチカットオフと呼ぶ。
【0027】
コントローラ10は、クラッチカットオフをしないようにクラッチカットオフ選択スイッチ9が選択されている場合には、クラッチカットオフ条件が満たされてもカットオフ信号を出力しない。したがって、クラッチカットオフをしないようにクラッチカットオフ選択スイッチ9が選択されている場合には、上述したクラッチカットオフは行われない。
【0028】
図8は、土砂等をダンプトラックへ積み込む方法の1つであるVシェープローディングについて示す図である。Vシェープローディングでは、まず、矢印aで示すように、ホイールローダ100を前進させて土砂等をすくい込み、その後、矢印bで示すように、ホイールローダ100を一旦後退させる。そして、矢印cで示すように、ダンプトラックに向けてホイールローダ100を前進させて、すくい込んだ土砂等をダンプトラックに積み込み、矢印dで示すように、ホイールローダ100を元の位置に後退させる。
【0029】
図8の矢印cで示す土砂等のダンプトラックへの積み込みの際には、掘削時のように大きな駆動力が必要ではないため、オペレータは、通常、シフトスイッチ8によって最大速度段を2速に設定するか、変速手段切り替え装置35でトランスミッション3における変速を手動で行うように切り替えた上で、速度段を2速に固定するように設定している。
【0030】
図9は、図8の矢印cで示す土砂等のダンプトラックへの積み込みの際のホイールローダ100の状態を説明する図である。説明の便宜上、土砂等を積み込む作業を行う際に接近する対象物であるダンプトラックへ接近する際の初期の期間であって、ホイールローダ100を加速させる期間をアプローチ初期と呼ぶ。ダンプトラックへアプローチする際の中期の期間であって、ホイールローダ100を減速し始めてからホイールローダ100が停止するまでの期間をアプローチ中期と呼ぶ。ホイールローダ100が停止してから、バケット112内の土砂等をダンプトラックに放土し終えるまでの期間をアプローチ後期と呼ぶ。
【0031】
図9に示すように、アプローチ初期では、ホイールローダ100を加速させるとともにバケット112を上昇させるため、アクセルペダル12が最大限に踏み込まれる。アプローチ中期では、バケット112を上昇させるため、アクセルペダル12が最大限に踏み込まれるが、ホイールローダ100を減速させるためにブレーキペダル31も徐々に踏み込まれる。なお、アプローチ中期では、走行中にバケット112の上昇が完了し、アクセルペダル12を戻し操作した状態でホイールローダ100を減速させるためにブレーキペダル31を徐々に踏み込む場合もある。
【0032】
アプローチ後期では、ホイールローダ100を停止させておくためにブレーキペダル31が最大限に踏み込まれる。クラッチカットオフをするようにクラッチカットオフ選択スイッチ9が選択されている場合には、アプローチ中期のオペレータによるブレーキペダル31の踏み込みなどによって、後述するクラッチカットオフ条件が満たされると、上述したように、クラッチカットオフが行われる。
【0033】
アプローチ中期で、アクセルペダル12を踏み込んでバケット112を上昇させつつ、ブレーキペダル31を徐々に踏み込んでホイールローダ100を減速させる際にクラッチカットオフ条件が満たされる場合、ダンプトラックへの接近時に駆動力の伝達が遮断されるので、駆動力に抗してホイールローダ100を減速および停止させる必要がない。これにより、クラッチカットオフをせずに駆動力に抗してホイールローダ100を減速および停止させたときと比べて、ブレーキ部5aに対する負担を減らすことができ、ブレーキ部5aの温度上昇を抑制し、ブレーキ部5aの各部の消耗を抑制できる。クラッチカットオフを作動させた場合は、エンジン1の回転数が高い状態を維持させつつホイールローダ100を減速、停止させても、入力軸21と出力軸22の回転数比であるトルコン速度比eがほぼ1の状態であり、エンジン1からトルコン2への入力トルクが非常に小さいので、トルコン2における動力損失を低減して、燃料消費量を低減できる。
【0034】
しかし、クラッチカットオフのタイミングが早過ぎる場合には、駆動力が制動力により十分に抑えられる前にクラッチカットオフによって駆動力の伝達が突然遮断されることとなるので、ホイールローダ100の駆動力が急激に減少してホイールローダ100の車体全体が前後方向に揺れるピッチングを誘発するおそれがある。土砂等を積み込む作業を行う場合などには、バケット112の位置が高いため、ピッチングがより大きくなる傾向にある。ピッチングが発生すると、乗り心地が悪化するだけでなく、バケット112に積んである土砂等がこぼれてしまうこともある。そのため、オペレータは車両を滑らかに減速させて停止させるために、ブレーキ部5aの作動に注意しながら運転していた。
【0035】
ピッチングを嫌うオペレータは、従来のホイールローダにてダンプトラックに土砂等を積み込む作業を行う場合などには、クラッチカットオフをしないようにクラッチカットオフ選択スイッチ9を選択して、上述したクラッチカットオフが行われないようにしていることがある。この場合には、上述したようなピッチングを誘発するおそれはないが、ブレーキ部5aの各部の消耗や、トルコン2における動力損失の増大を招くこととなる。
【0036】
クラッチカットオフのタイミングが早過ぎる場合に生じるピッチングを防止して、作業車両を滑らかに減速、停止させるためには、クラッチカットオフを作動させる前にブレーキ部5aの制動力により車輪へ伝達される駆動力を十分に抑えておく必要がある。なお、同一速度段では車速が低いほど駆動力が大きい(図3参照)。したがって、車速が低いほど高い制動力でクラッチ18,19を解放し、車速が高いほど低い制動力でクラッチ18,19を解放することが望ましい。
【0037】
以上の制御により、車速が低い状態、すなわち駆動力が大きい状態であっても、高い制動力で駆動力を十分に抑えた上でクラッチカットオフを作動させることができるため、作業車両を滑らかに減速させることができる。なお、クラッチカットオフのタイミングが遅過ぎる場合には、クラッチカットオフによって駆動力の伝達が遮断されるとともに高い制動力が作用するため、ホイールローダ100が急停止して、上述したようなピッチングを誘発するおそれがある点を考慮する必要がある。
【0038】
アプローチ中期では、上記したように、走行中にバケット112の上昇が完了し、アクセルペダル12を戻し操作した状態でホイールローダ100を減速させるためにブレーキペダル31を徐々に踏み込む場合もある。アクセルペダル12が踏み込まれていない走行状態では、駆動力が小さく、車両はエンジンブレーキにより減速している。したがって、早いタイミングでクラッチカットオフを作動させてもピッチングを誘発することなく、車両を滑らかに停止させることができる。ただし、クラッチカットオフ後の制動力が小さすぎると、制動距離がいたずらに長くなってしまうため、ある程度の制動力でクラッチカットオフをすることが望ましい。これにより、エンジンブレーキとブレーキ部5aの制動力により車両を十分に減速させた上でクラッチカットオフが行われるため、制動距離を短くすることができる。
【0039】
図10に示すように、急勾配(たとえば傾斜角度が25度程度)の傾斜路を上りながら作業を行う場合には、一般的に大きな駆動力を必要とするため、トランスミッション3の速度段は低速の1速に設定されている。急な傾斜路では、ホイールローダ100の自重がホイールローダ100が下がる方向(後退する方向)への走行負荷として作用するため、平地と同じ条件でクラッチカットオフを行うとクラッチカットオフのタイミングが早過ぎる。そのため、制動力が十分ではない状態でクラッチカットオフによって駆動力が断たれてしまうため、ホイールローダ100がそれまでとは逆に傾斜路を下降し始めてしまう。この場合、オペレータがさらにブレーキペダルを踏み込んでホイールローダ100を停止させようとするので、ホイールローダ100が急停止して、上述したようなピッチングを誘発するおそれがある。
【0040】
したがって、平地でのバケット112の上昇を伴う土砂等の積み込み作業においては、早めにクラッチカットオフを作動させ、急な傾斜路での作業においては、遅めにクラッチカットオフを作動させることが望ましい。
【0041】
上述したクラッチカットオフ作動モード切り替えスイッチ36は、オペレータの操作によって手動で、クラッチカットオフのタイミングを早い第1モードと、遅い第2モードとの間で切り替えることができるように構成されている。換言すれば、クラッチカットオフ作動モード切り替えスイッチ36は、クラッチ18,19を低い制動力で解放する第1モードと、クラッチ18,19を高い制動力で解放する第2モードとの間で、クラッチカットオフ条件を選択可能に構成されている。平地での土砂等の積み込み作業には、クラッチカットオフが早めに作動する第1モードが適している。一方、急勾配(たとえば傾斜角度が25度以上)の傾斜路での作業には、クラッチカットオフが遅めに作動する第2モードが適している。
【0042】
本実施の形態のホイールローダ100では、クラッチカットオフの作動タイミングが以下に述べるように自動で設定される。これにより、本実施の形態では、種々の走行/作業状況に応じてクラッチカットオフのタイミングが適切となる。
【0043】
−−−クラッチカットオフ制御−−−
本実施の形態では、上述したような種々の走行/作業状況に対応した最適なタイミングでのクラッチカットオフを実現するために、以下のようにクラッチカットオフの作動タイミングを決定する。
(1)アクセルペダル12を最大限に踏み込んでバケット112を上昇させつつ、ブレーキペダル31を徐々に踏み込んでホイールローダ100を減速させながらダンプトラックにアプローチする走行状態においては、車速が高いほど、早めにクラッチカットオフを作動させる。
(2)アクセルペダル12を戻し操作して、ブレーキペダル31を徐々に踏み込んでホイールローダ100を減速させながらダンプトラックにアプローチする走行状態においては、車速に拘わらず、所定のタイミングでクラッチカットオフを作動させる。
(3)トランスミッション3の速度段が2速に設定された状態で行われる平地での作業等のクラッチカットオフの作動タイミングに比べて、トランスミッション3の速度段が1速に設定された状態で行われる急な傾斜路での作業等の際のクラッチカットオフの作動タイミングを遅くする。
(4)上記(1)〜(3)のクラッチカットオフの作動タイミングは、第1モードに設定されている状態では早く、第2モードに設定されている状態では遅い。
【0044】
具体的には、コントローラ10は、アクセルペダル12の踏み込みの有無、車速v、トランスミッション3の設定速度段、クラッチカットオフの作動モード(第1/第2モード)およびブレーキ圧Pbの情報に基づいてクラッチカットオフ条件が成立しているか否かを判定し、クラッチカットオフ条件が成立していると判定したとき、クラッチ18,19を解放するようにクラッチ18,19の係合/解放を制御する。
【0045】
図11は、クラッチカットオフ条件を示す図であり、図11の横軸は車速v、縦軸はブレーキ圧Pbを表している。図11(a)では速度段が1速に設定されているときにクラッチカットオフを作動させる車速vとブレーキ圧Pbとの関係を示し、図11(b)では速度段が2速に設定されているときにクラッチカットオフを作動させる車速vとブレーキ圧Pbとの関係を示している。図11には、アクセルペダル12が踏み込まれている状態においてクラッチカットオフを作動させるブレーキ圧であるブレーキ圧カットオフ閾値Ptの特性N1,D1,N2およびD2が示されている。これらの特性N1,D1,N2,D2は、ルックアップテーブル形式でコントローラ10のROMまたはRAMに記憶されている。さらに、図11には、アクセルペダル12が踏み込まれていない状態においてクラッチカットオフを作動させるブレーキ圧であるブレーキ圧カットオフ閾値Pt(PbN21,PbD21,PbN22,PbD22)が破線で示されている。所定値PbN21,PbN22,PbD21,PbD22はコントローラ10のROMまたはRAMに記憶されている。
【0046】
なお、ブレーキ圧カットオフ閾値Ptの特性N1,D1,N2およびD2は、少なくとも、アクセルペダル12が最大限に踏み込まれていても、駆動力に抗して車速vを低下させることができる程度の制動力を発生させるブレーキ圧Pbに相当する値とされる。
【0047】
特性N1は、速度段が1速に設定され、かつ、クラッチカットオフの作動モードが第1モードに設定され、かつ、アクセルペダル12が踏み込まれているときに用いられる。特性D1は、速度段が1速に設定され、かつ、クラッチカットオフの作動モードが第2モードに設定され、かつ、アクセルペダル12が踏み込まれているときに用いられる。特性N2は、速度段が2速に設定され、かつ、クラッチカットオフの作動モードが第1モードに設定され、かつ、アクセルペダル12が踏み込まれているときに用いられる。特性D2は、速度段が2速に設定され、かつ、クラッチカットオフの作動モードが第2モードに設定され、かつ、アクセルペダル12が踏み込まれているときに用いられる。なお、特性N1,D1,N2,D2のそれぞれと、アクセルペダル踏込無のブレーキ圧カットオフ閾値Pt(PbN21,PbD21,PbN22,PbD22)のそれぞれとの交差点に相当する車速をそれぞれ基準車速とし、この基準車速に対して低い車速を低速側の車速、基準車速に対して高い車速を高速側の車速として定義する。
【0048】
特性N1に基づいてブレーキ圧カットオフ閾値Ptを設定する場合、車速vが低速側車速閾値va(たとえば2km/h)以上かつ高速側車速閾値vb(たとえば5km/h)以下の範囲(va≦v≦vb)では、車速vの増加に伴いブレーキ圧カットオフ閾値Ptは直線的に減少する。車速vが低速側車速閾値vaより小さいと、ブレーキ圧カットオフ閾値PtはPn1Hとなり、車速vが高速側車速閾値vbより大きいと、ブレーキ圧カットオフ閾値PtはPn1Lとなる。
同様に、特性D1に基づいてブレーキ圧カットオフ閾値Ptを設定する場合、車速vが低速側車速閾値va以上かつ高速側車速閾値vb以下の範囲(va≦v≦vb)では、車速vの増加に伴いブレーキ圧カットオフ閾値Ptは直線的に減少する。車速vが低速側車速閾値vaより小さいと、ブレーキ圧カットオフ閾値PtはPd1Hとなり、車速vが高速側車速閾値vbより大きいと、ブレーキ圧カットオフ閾値PtはPd1Lとなる。
【0049】
特性N2に基づいてブレーキ圧カットオフ閾値Ptを設定する場合、車速vが低速側車速閾値va以上かつ高速側車速閾値vb以下の範囲(va≦v≦vb)では、車速vの増加に伴いブレーキ圧カットオフ閾値Ptは直線的に減少する。車速vが低速側車速閾値vaより小さいと、ブレーキ圧カットオフ閾値PtはPn2Hとなり、車速vが高速側車速閾値vbより大きいと、ブレーキ圧カットオフ閾値PtはPn2Lとなる。
同様に、特性D2に基づいてブレーキ圧カットオフ閾値Ptを設定する場合、車速vが低速側車速閾値va以上かつ高速側車速閾値vb以下の範囲(va≦v≦vb)では、車速vの増加に伴いブレーキ圧カットオフ閾値Ptは直線的に減少する。車速vが低速側車速閾値vaより小さいと、ブレーキ圧カットオフ閾値PtはPd2Hとなり、車速vが高速側車速閾値vbより大きいと、ブレーキ圧カットオフ閾値PtはPd2Lとなる。
【0050】
つまり、アクセルペダル12の踏み込み有りの場合では、車速が低いほど高い制動力でクラッチ18,19が解放され、車速が高いほど低い制動力でクラッチ18,19が解放されるようにクラッチカットオフ条件が定められている。
【0051】
このような制御により、たとえば、アプローチ中期でバケット112を上昇させるためにアクセルペダル12を最大限に踏み込みつつ、ホイールローダ100を減速させるためにブレーキペダル31を徐々に踏み込んだ場合には、車速が低いほど遅いタイミングでクラッチカットオフを作動させ、車速が高いほど早いタイミングでクラッチカットオフを作動させることができる。
【0052】
なお、速度段が2速に設定されている場合は、速度段が1速に設定されている場合に比べて駆動力が小さいので、ホイールローダ100を減速させる、または、完全に停止させるのに必要な制動力は小さくてよい。そこで、本実施の形態では、速度段が1速に設定されている状態では、速度段が2速に設定されている状態に比べてブレーキ圧カットオフ閾値Ptが大きい(Pn1H>Pn2H,Pn1L>Pn2L,Pd1H>Pd2H,Pd1L>Pd2L)。すなわち、クラッチカットオフ条件は、1速の場合よりも2速の場合の方が、低い制動力でクラッチ18,19が解放されるように定められている。
【0053】
ブレーキ圧Pn1Lは、Pd1Lよりも小さく(Pn1L<Pd1L)、ブレーキ圧Pn1Hは、Pd1Hよりも小さい(Pn1H<Pd1H)。ブレーキ圧Pn2Lは、Pd2Lよりも小さく(Pn2L<Pd2L)、ブレーキ圧Pn2Hは、Pd2Hよりも小さい(Pn2H<Pd2H)。換言すれば、クラッチカットオフ条件は、第1モードでは低い制動力でクラッチ18,19が解放され、第2モードでは高い制動力でクラッチ18,19が解放されるように定められている。
【0054】
図11(a)には、速度段が1速に設定され、かつ、クラッチカットオフの作動モードが第1モードに設定され、かつ、アクセルペダル12が踏み込まれていないときにクラッチカットオフを作動させるブレーキ圧であるブレーキ圧カットオフ閾値Pt=PbN21が破線で示されている。同様に、速度段が1速に設定され、かつ、クラッチカットオフの作動モードが第2モードに設定され、かつ、アクセルペダル12が踏み込まれていないときにクラッチカットオフを作動させるブレーキ圧であるブレーキ圧カットオフ閾値Pt=PbD21が破線で示されている。
【0055】
図11(b)には、速度段が2速に設定され、かつ、クラッチカットオフの作動モードが第1モードに設定され、かつ、アクセルペダル12が踏み込まれていないときにクラッチカットオフを作動させるブレーキ圧であるブレーキ圧カットオフ閾値Pt=PbN22が破線で示されている。同様に、速度段が2速に設定され、かつ、クラッチカットオフの作動モードが第2モードに設定され、かつ、アクセルペダル12が踏み込まれていないときにクラッチカットオフを作動させるブレーキ圧であるブレーキ圧カットオフ閾値Pt=PbD22が破線で示されている。つまり、アクセルペダル12の踏み込み無しの場合では、車速に拘わらず、所定の制動力でクラッチ18,19が解放されるようにクラッチカットオフ条件が定められている。
【0056】
なお、速度段が1速に設定されている状態では、速度段が2速に設定されている状態に比べてブレーキ圧カットオフ閾値Ptが大きい(PbN21>PbN22,PbD21>PbD22)。すなわち、クラッチカットオフ条件は、1速の場合よりも2速の場合の方が、低い制動力でクラッチ18,19が解放されるように定められている。
ブレーキ圧PbN21は、PbD21よりも小さく(PbN21<PbD21)、ブレーキ圧PbN22は、PbD22よりも小さい(PbN22<PbD22)。換言すれば、クラッチカットオフ条件は、第1モードでは低い制動力でクラッチ18,19が解放され、第2モードでは高い制動力でクラッチ18,19が解放されるように定められている。
【0057】
ブレーキ圧PbN21は、Pn1Hよりも小さく、Pn1Lよりも大きい(Pn1L<PbN21<Pn1H)。ブレーキ圧PbD21は、Pd1Hよりも小さく、Pd1Lよりも大きい(Pd1L<PbD21<Pd1H)。ブレーキ圧PbN22は、Pn2Hよりも小さく、Pn2Lよりも大きい(Pn2L<PbN22<Pn2H)。ブレーキ圧PbD22は、Pd2Hよりも小さく、Pd2Lよりも大きい(Pd2L<PbD22<Pd2H)。
【0058】
換言すれば、低速側では、アクセルペダル12の踏み込み有りの場合よりも、アクセルペダル12の踏み込み無しの場合の方が、低い制動力でクラッチ18,19が解放されるようにクラッチカットオフ条件が定められている。一方、高速側では、アクセルペダル12の踏み込み有りの場合よりも、アクセルペダル12の踏み込み無しの場合の方が、高い制動力でクラッチ18,19が解放されるようにクラッチカットオフ条件が定められている。
【0059】
このような条件設定により、たとえば、低速側において、アプローチ中期でアクセルペダル12を戻し操作し、ホイールローダ100を減速させるためにブレーキペダル31を徐々に踏み込んだ場合には、アクセルペダル12の踏み込み操作時に比べて早いタイミングでクラッチカットオフを作動させることができる。一方、高速側ではアクセルペダル12の踏み込み操作時に比べて遅いタイミングでクラッチカットオフを作動させることができる。
【0060】
コントローラ10は、入力される各種の情報と上記特性N1,N2,D1,D2または所定値PbN21,PbN22,PbD21,PbD22とに基づき、クラッチカットオフ条件が満たされたと判定されると、カットオフ信号をトランスミッション制御装置20に出力する。
【0061】
以下、クラッチカットオフ制御を図12〜図15のフローチャートを用いて説明する。
図12〜図15は、一実施の形態のホイールローダ100におけるクラッチ制御処理の動作を示したフローチャートである。ホイールローダ100の不図示のイグニッションスイッチがオンされると、図12〜図15に示す処理を行うプログラムが起動され、コントローラ10で繰り返し実行される。ステップS101において、圧力センサ33で検出されたブレーキ圧Pbの情報、ペダル操作量検出器12aで検出されたペダル操作量sの情報、車速検出器16で検出された車速vの情報、コントローラ10で検出されたトランスミッション3の設定速度段および現在のクラッチカットオフの作動モード(第1/第2モード)の情報を取得して、ステップS103へ進む。
【0062】
ステップS103では、車速検出器16が正常であるか否かを判定する。コントローラ10は、たとえば、設定速度段やエンジン回転数が変化しても車速検出器16からの出力値に変化がほとんどない場合には異常と判定する。ステップS103で肯定判定されると、すなわち、車速検出器16が正常と判定されるとステップS106へ進む。ステップS103で否定判定されると、ステップS109へ進み、ブレーキ圧カットオフ閾値Ptを予めコントローラ10のROMやRAMに記憶されている所定値Paに設定して、ステップS141へ進む。
【0063】
ステップS141では、ステップS101で取得したブレーキ圧Pbが設定されたブレーキ圧カットオフ閾値Pt以上であるか否かを判定する。ステップS141で肯定判定されると、ステップS151へ進み、上述したカットオフ信号をトランスミッション制御装置20に出力してリターンする。
【0064】
車速検出器16が異常と判定されたときに設定されるブレーキ圧カットオフ閾値Pt=Paは、たとえば、速度段が1速かつ作動モードが第1モードに設定されているときには、ブレーキ圧PbN21とする。速度段が2速かつ作動モードが第1モードに設定されているときには、ブレーキ圧PbN22とする。速度段が1速かつ作動モードが第2モードに設定されているときには、ブレーキ圧PbD21とする。速度段が2速かつ作動モードが第2モードに設定されているときには、ブレーキ圧PbD22とする。
【0065】
つまり、ステップS103で、車速検出器16が異常と判定されると、アクセルペダル12の踏み込みの有無、および、車速vに拘わらずに所定の制動力でクラッチカットオフを作動させる。これにより、車速検出器16からの異常な出力値に基づいてクラッチカットオフタイミングが設定されることを防止できる。
【0066】
ステップS106では、クラッチカットオフをするようにクラッチカットオフ選択スイッチ9が選択されているか否かを判定する。ステップS106で肯定判定されると、すなわち、クラッチカットオフをするようにクラッチカットオフ選択スイッチ9が選択されていると判定されるとステップS111へ進み、クラッチカットオフ作動モード切り替えスイッチ36が第1モードに設定されているか否かを判定する。ステップS111で肯定判定されると、すなわち、クラッチカットオフ作動モード切り替えスイッチ36が第1モードに設定されていると判定されるとステップS116へ進み、トランスミッション3の設定速度段が1速であるか否かを判定する。
【0067】
ステップS116で肯定判定されると、すなわち、トランスミッション3の設定速度段が1速であると判定されるとステップS121へ進み、アクセルペダル12の踏み込みの有無を判定する。ステップS121で肯定判定されると、すなわち、アクセルペダル12の踏み込み有りと判定されると、ステップS126へ進み、特性N1(図11(a)参照)を記憶したテーブルを参照して、ステップS101で取得した車速vに基づきブレーキ圧カットオフ閾値Ptを設定する(Pn1L≦Pt≦Pn1H)。ステップS121で否定判定されると、すなわち、アクセルペダル12の踏み込み無しと判定されると、ステップS131へ進み、ブレーキ圧カットオフ閾値PtをPbN21に設定する(Pt=PbN21)。ステップS126またはステップS131でブレーキ圧カットオフ閾値Ptが設定されると、ステップS141へ進んで上述した処理が実行される。
【0068】
ステップS111で否定判定されると図13に示すステップS216へ進み、トランスミッション3の設定速度段が1速であるか否かを判定する。ステップS216で肯定判定されると、すなわち、トランスミッション3の設定速度段が1速であると判定されるとステップS221へ進み、アクセルペダル12の踏み込みの有無を判定する。ステップS221で肯定判定されると、すなわち、アクセルペダル12の踏み込み有りと判定されると、ステップS226へ進み、特性D1(図11(a)参照)を記憶したテーブルを参照して、ステップS101で取得した車速vに基づきブレーキ圧カットオフ閾値Ptを設定する(Pd1L≦Pt≦Pd1H)。ステップS221で否定判定されると、すなわち、アクセルペダル12の踏み込み無しと判定されると、ステップS231へ進み、ブレーキ圧カットオフ閾値PtをPbD21に設定する(Pt=PbD21)。ステップS226またはステップS231でブレーキ圧カットオフ閾値Ptが設定されると、図12に示すステップS141へ進んで上述した処理が実行される。
【0069】
ステップS116で否定判定されると図14に示すステップS316へ進み、トランスミッション3の設定速度段が2速であるか否かを判定する。ステップS316で肯定判定されると、すなわち、トランスミッション3の設定速度段が2速であると判定されるとステップS321へ進み、アクセルペダル12の踏み込みの有無を判定する。ステップS321で肯定判定されると、すなわち、アクセルペダル12の踏み込み有りと判定されると、ステップS326へ進み、特性N2(図11(b)参照)を記憶したテーブルを参照して、ステップS101で取得した車速vに基づきブレーキ圧カットオフ閾値Ptを設定する(Pn2L≦Pt≦Pn2H)。ステップS321で否定判定されると、すなわち、アクセルペダル12の踏み込み無しと判定されると、ステップS331へ進み、ブレーキ圧カットオフ閾値PtをPbN22に設定する(Pt=PbN22)。ステップS326またはステップS331でブレーキ圧カットオフ閾値Ptが設定されると、図12に示すステップS141へ進んで上述した処理が実行される。
【0070】
図13に示すステップS216で否定判定されると図15に示すステップS416へ進み、トランスミッション3の設定速度段が2速であるか否かを判定する。ステップS416で肯定判定されると、すなわち、トランスミッション3の設定速度段が2速であると判定されるとステップS421へ進み、アクセルペダル12の踏み込みの有無を判定する。ステップS421で肯定判定されると、すなわち、アクセルペダル12の踏み込み有りと判定されると、ステップS426へ進み、特性D2(図11(b)参照)を記憶したテーブルを参照して、ステップS101で取得した車速vに基づきブレーキ圧カットオフ閾値Ptを設定する(Pd2L≦Pt≦Pd2H)。ステップS421で否定判定されると、すなわち、アクセルペダル12の踏み込み無しと判定されると、ステップS431へ進み、ブレーキ圧カットオフ閾値PtをPbD22に設定する(Pt=PbD22)。ステップS426またはステップS431でブレーキ圧カットオフ閾値Ptが設定されると、図12に示すステップS141へ進んで上述した処理が実行される。
【0071】
ステップS106,S141,S316またはS416で否定判定されると、リターンする。
【0072】
以上説明した本実施の形態によれば、以下のような作用効果を奏することができる。
(1)コントローラ10は、アクセルペダル12の踏み込みの有無に基づいて、クラッチカットオフを作動させるブレーキ圧カットオフ閾値Ptを設定するようにした。したがって、アクセルペダル12を踏み込み操作した状態と、アクセルペダル12を戻し操作した状態とで、それぞれ適切なタイミングでクラッチ18,19を解放することができる。
【0073】
(2)コントローラ10は、アクセルペダル12の踏み込み有りの場合には、車速vが高いほどブレーキ圧カットオフ閾値Ptを低く、車速が低いほどブレーキ圧カットオフ閾値Ptを高く設定した(図11の特性N1,N2,D1,D2参照)。
【0074】
これにより、バケット112を上昇させるためにアクセルペダル12を最大限に踏み込みつつ、ブレーキペダル31を徐々に踏み込んで減速しながらダンプトラックへアプローチするなどの作業状態において、駆動力の大きさに対応した制動力によりクラッチカットオフの作動直前の車輪へ伝達される駆動力を十分に抑制することができる。その結果、大きな駆動力が残った状態でクラッチカットオフが作動することに起因したピッチングを誘発することなく、ホイールローダ100を滑らかに減速させ、停止させることができる。
【0075】
(3)コントローラ10は、低速側では、アクセルペダル12の踏み込み有りの場合よりもアクセルペダル12の踏み込み無しの場合の方が、クラッチカットオフを作動させるブレーキ圧カットオフ閾値Ptを低く設定するようにした。アクセルペダル12の踏み込み無しの場合、すなわち駆動力が小さく、エンジンブレーキにより減速している状態にあるときには、低い制動力でクラッチカットオフを作動させてもピッチングを誘発することなく、車両を滑らかに停止させることができる。一方、(2)で記したように、アクセルペダル12の踏み込み有りの場合における低速走行状態、すなわち駆動力が大きい走行状態では、高い制動力でクラッチカットオフを行う前に車輪へ伝達される駆動力を十分に抑えるように、ホイールローダ100を減速させることができる。その結果、大きな駆動力が残った状態でクラッチカットオフが作動することに起因したピッチングを誘発することなく、ホイールローダ100を滑らかに減速させ、停止させることができる。
【0076】
(4)コントローラ10は、1速の場合よりも2速の場合の方がブレーキ圧カットオフ閾値Ptを低く設定した(図11(a)および(b)参照)。これにより、たとえば、ホイールローダ100が大きな駆動力を必要とする急な傾斜路での作業等を1速で行っている場合と、平地でのバケット112の上昇を伴う土砂等の積込み作業等を2速で行っている場合とで、それぞれに適切なタイミングでクラッチ18,19を解放することができる。
【0077】
(5)コントローラ10は、クラッチカットオフ作動モード切り替えスイッチ36により第1モードが選択されると、クラッチ18,19を低い制動力で解放し、クラッチカットオフ作動モード切り替えスイッチ36により第2モードが選択されると、クラッチ18,19を高い制動力で解放するように、ブレーキ圧カットオフ閾値Ptを設定した。これにより、走行路の傾斜角度の違いやバケット112の積載量の違い、作業内容の違いなど、種々の走行/作業状況に応じてオペレータがクラッチ18,19を解放するタイミングを変更できるため、作業効率の向上を図ることができる。
【0078】
(6)上記(1)〜(5)のとおり、コントローラ10は、アクセルペダル12の踏み込みの有無、車速、制動力、トランスミッション3の設定速度段、クラッチカットオフの作動モード(第1モードまたは第2モード)の情報に基づいて、クラッチカットオフ条件を満たすと判定した場合に、クラッチ18,19を解放するようにクラッチ18,19の係合/解放を制御する。これにより、ホイールローダ100の平地での土砂の積み込み作業、および傾斜路での作業などの種々の走行/作業状況に応じた適切なタイミングでクラッチカットオフが作動するのでホイールローダ100の動きが滑らかになる。
【0079】
(7)上記(1)〜(5)のとおり、コントローラ10は、アクセルペダル12の踏み込みの有無、車速、制動力およびトランスミッション3の設定速度段の情報に基づいて、ブレーキ圧カットオフ閾値Ptを自動的に設定した。これにより、作業効率の向上とオペレータの疲労軽減を図ることができる。
【0080】
これに対して、ブレーキ圧カットオフ閾値Ptをオペレータが無段階または多段階で任意に調整できるクラッチ制御装置を備えたホイールローダでは、オペレータが走行/作業状況に応じて頻繁に調整する必要性が生じ、オペレータに煩わしさを感じさせてしまう。さらに、状況に応じてどれを選択したら最適なのかを判断することが困難であり、運転しながら最適なブレーキ圧カットオフ閾値Ptを手動で設定することは熟練した技量が必要となる。
【0081】
(8)コントローラ10で車速検出器16の異常が判定されると、アクセルペダル12の踏み込みの有無、および、ホイールローダ100の車速vに拘わらずに、ブレーキ圧カットオフ閾値Ptを所定値に設定する。これにより、車速検出器16からの異常な出力値に基づいてブレーキ圧カットオフ閾値Ptが設定されることを防止できる。
【0082】
次のような変形も本発明の範囲内であり、変形例の一つ、もしくは複数を上述の実施形態と組み合わせることも可能である。
[変形例]
(1)上述の説明では、ホイールローダ100の制動力を検出する制動力検出手段を、ブレーキ圧Pbを検出する圧力センサ33としたが、本発明はこれに限定されない。圧力センサ33に代えて、たとえばブレーキペダル31の操作量(ペダルストロークまたはペダル角度)を検出するペダル操作量検出器31aや、ブレーキペダル31の踏み込み力を検出する検出器(不図示)を制動力検出手段とすることができる。すなわち、ブレーキの作動状態(制動力の大きさ)を直接的にもしくは間接的に検出できる検出手段であればよい。換言すれば、クラッチカットオフ条件として考慮するパラメータはブレーキ圧Pbに限られない。
【0083】
(2)上述の説明では、ペダル操作量検出器12aからコントローラ10に入力されるアクセルペダル12のペダル操作量sに基づいて、コントローラ10がアクセルペダル12の踏み込みの有無を判定したが、本発明はこれに限定されない。ペダル操作量sに代えて、たとえばエンジン1の実回転数を検出して、エンジン実回転数に基づきアクセルペダル12の踏み込みの有無をコントローラ10で判定してもよい。アクセル開度、または、エンジン目標回転数に基づいて、アクセルペダル12の踏み込みの有無を判定してもよい。
【0084】
(3)上述の説明では、クラッチカットオフ作動モード切り替えスイッチ36の操作によってクラッチカットオフ条件を第1モードまたは第2モードに設定できるように構成したが、本発明はこれに限定されない。たとえば、クラッチカットオフ作動モードを3つのモードとして、クラッチカットオフのタイミングを「早い」第1モードと「遅い」第2モードと「その中間」第3モードのいずれかから選択できるようにしてもよい。すなわち、クラッチカットオフ作動モードは、少なくとも2モード以上であって、クラッチカットオフのタイミングを少なくとも「早い」と「遅い」のいずれかに設定できればよい。
【0085】
(4)上述の説明では、クラッチカットオフを行う場合には、前後進用のクラッチ18,19をカットオフするためのカットオフ信号をコントローラ10がトランスミッション制御装置20に出力するように構成しているが、本発明はこれに限定されない。たとえば、クラッチカットオフを行う時点で係合している方のクラッチのみをカットオフするようにカットオフ信号をコントローラ10がトランスミッション制御装置20に出力するように構成してもよい。すなわち、ホイールローダ100が前進しているときにクラッチカットオフを行う場合には、前進用のクラッチ18だけをカットオフするようにカットオフ信号をコントローラ10がトランスミッション制御装置20に出力するように構成してもよい。
【0086】
(5)上述の説明では、トランスミッション3における選択可能な速度段の段数は4段であったが、本発明はこれに限定されず、3段でもよく、5段以上であってもよい。
(6)上述の説明では、トランスミッション3が低速度段である1速または2速に設定されている場合にのみ、クラッチカットオフ条件を満たすか否かの判定を行ったが、本発明はこれに限定されない。たとえば、速度段が5段ある場合には、低速度段である1速〜3速に設定されている場合にのみ、クラッチカットオフ条件を満たすか否かの判定を行ってもよい。この場合、クラッチカットオフ条件は、1速の場合よりも2速の場合の方が、低い制動力でクラッチ18,19が解放され、2速の場合よりも3速の場合の方が、低い制動力でクラッチ18,19が解放されるように定められている。
【0087】
(7)上述の説明では、アクセルペダル12の踏み込みの有無、車速、制動力、トランスミッション3の設定速度段、クラッチカットオフの作動モード(第1モードまたは第2モード)の情報に基づいて、クラッチカットオフ条件が成立しているか否かを判定したが、本発明はこれに限定されない。
【0088】
トランスミッション3の設定速度段およびクラッチカットオフの作動モードの情報のいずれかを加味せずに、クラッチカットオフ条件が成立しているか否かを判定してもよい。トランスミッション3の設定速度段およびクラッチカットオフの作動モードの情報のいずれも加味せずに、アクセルペダル12の踏み込みの有無、車速、および、制動力の情報に基づいて、クラッチカットオフ条件が成立しているか否かを判定してもよい。
【0089】
車速、トランスミッション3の設定速度段およびクラッチカットオフの作動モードの情報のいずれも加味せずに、アクセルペダル12の踏み込みの有無および制動力の情報に基づいて、クラッチカットオフ条件が成立しているか否かを判定してもよい。この場合、アクセルペダル12の踏み込み有りの場合よりも、アクセルペダル12の踏み込み無しの場合の方が、低い制動力でクラッチ18,19が解放されるようにクラッチカットオフ条件を定めることができる。さらに、上記実施の形態と同様に、アクセルペダル12の踏み込みの有無および制動力の情報に、トランスミッション3の設定速度段も加味してクラッチカットオフ条件が成立しているか否かを判定してもよい。
【0090】
アクセルペダル12の踏み込みの有無、トランスミッション3の設定速度段およびクラッチカットオフの作動モードの情報のいずれも加味せずに、車速および制動力の情報に基づいて、クラッチカットオフ条件が成立しているか否かを判定してもよい。この場合、上記実施の形態と同様に、車速が高いほど、低い制動力でクラッチ18,19が解放されるようにクラッチカットオフ条件を定めることができる。さらに、上記実施の形態と同様に、車速および制動力の情報に、トランスミッション3の設定速度段も加味してクラッチカットオフ条件が成立しているか否かを判定してもよい。
【0091】
(8)上述の説明では、車速検出器16の異常時にブレーキ圧カットオフ閾値Ptを、アクセルペダル12の踏み込み無しの場合と同様に、設定された作動モードおよび設定速度段に応じて、PbN21,PbD21,PbN22,PbD22のいずれかに設定したが本発明はこれに限定されない。車速検出器16の異常時にブレーキ圧カットオフ閾値Ptは、設定された作動モードおよび設定速度段に応じて、アクセルペダル12の踏み込み有りの条件範囲内で設定することができる。
【0092】
(9)上述の説明では、アクセルペダル12の踏み込み無しの場合に、設定された作動モードおよび設定速度段毎に一定の値としたが、本発明はこれに限定されない。たとえば、高速側ではブレーキ圧カットオフ閾値Ptを低速側に比べて高く設定してもよい。この場合、高速走行状態では、クラッチカットオフを行うタイミングをより遅くすることで、エンジンブレーキを効果的に発揮させ、ブレーキ部5aに大きな負担をかけることなく減速させることができる。
【0093】
(10)上述の説明では、特性N1,N2,D1,D2は車速va〜vbの範囲において、車速vの増加に伴い直線的に減少するようにブレーキ圧カットオフ閾値Ptを設定するものであったが、本発明はこれに限定されない。車速vの増加に伴いブレーキ圧カットオフ閾値Ptが二次曲線的に減少する関係であってもよいし、車速vの増加に伴いブレーキ圧カットオフ閾値Ptが段階的に減少する関係であってもよい。
【0094】
(11)上述の説明では、作業車両の一例としてホイールローダ100を例に説明したが、本発明はこれに限定されず、たとえば、フォークリフト、テレハンドラー、リフトトラック等、他の作業車両であってもよい。
【0095】
本発明は、上述した実施の形態に限定されるものでなく、発明の要旨を逸脱しない範囲で自由に変更、改良が可能である。
【符号の説明】
【0096】
1 エンジン、2 トルクコンバータ(トルコン)、3 トランスミッション、4 プロペラシャフト、5 アクスル、5a ブレーキ部、7 スイッチ、8 シフトスイッチ、9 クラッチカットオフ選択スイッチ、10 コントローラ、12 アクセルペダル、12a ペダル操作量検出器、14 回転数検出器、15 回転数検出器、16 車速検出器、17 クラッチカットオフ弁、18 前進クラッチ、19 後進クラッチ、20 トランスミッション制御装置、21 入力軸、22 出力軸、30 油圧源、31 ブレーキペダル、31a ペダル操作量検出器、32 ブレーキバルブ、32a ばね、33 圧力センサ、35 変速手段切り替え装置、36 スイッチ、100 ホイールローダ、101 センタピン、110 前部車体、111 アーム、112 バケット、113 タイヤ、114 アームシリンダ、115 バケットシリンダ、120 後部車体、121 運転室、122 エンジン室、123 タイヤ
【特許請求の範囲】
【請求項1】
アクセルペダルの踏み込みの有無を判定するアクセルペダル踏込判定手段と、
作業車両の車速を検出する車速検出手段と、
作業車両の制動力を検出する制動力検出手段と、
前記アクセルペダル踏込判定手段によって判定される前記アクセルペダルの踏み込みの有無、前記車速検出手段によって検出される前記作業車両の車速、および、前記制動力検出手段によって検出される前記作業車両の制動力に基づいて、クラッチカットオフ条件が成立しているか否かを判定する判定手段と、
前記判定手段によりクラッチカットオフ条件が成立していると判定された場合に、クラッチを解放するように前記クラッチの係合/解放を制御するクラッチ制御手段とを備えることを特徴とする作業車両のクラッチ制御装置。
【請求項2】
請求項1に記載の作業車両のクラッチ制御装置において、
前記クラッチカットオフ条件は、
低速側では、前記アクセルペダルの踏み込み有りの場合よりも、前記アクセルペダルの踏み込み無しの場合の方が、低い制動力で前記クラッチが解放されるように定められていることを特徴とする作業車両のクラッチ制御装置。
【請求項3】
請求項1または2に記載の作業車両のクラッチ制御装置において、
前記クラッチカットオフ条件は、
前記アクセルペダルの踏み込み有りの場合では、前記車速が高いほど、低い制動力で前記クラッチが解放され、前記アクセルペダルの踏み込み無しの場合では、前記車速に拘わらず、所定の制動力で前記クラッチが解放されるように定められていることを特徴とする作業車両のクラッチ制御装置。
【請求項4】
請求項1ないし3のいずれか1項に記載の作業車両のクラッチ制御装置において、
トランスミッションの設定速度段を検出する速度段検出手段をさらに備え、
前記判定手段は、前記速度段検出手段によって検出される前記トランスミッションの設定速度段も加味してクラッチカットオフ条件が成立しているか否かを判定し、
前記クラッチカットオフ条件は、少なくとも1速の場合よりも2速の場合の方が、低い制動力で前記クラッチが解放されるように定められていることを特徴とする作業車両のクラッチ制御装置。
【請求項5】
アクセルペダルの踏み込みの有無を判定するアクセルペダル踏込判定手段と、
作業車両の制動力を検出する制動力検出手段と、
前記アクセルペダル踏込判定手段によって判定される前記アクセルペダルの踏み込みの有無、および、前記制動力検出手段によって検出される前記作業車両の制動力に基づいて、クラッチカットオフ条件が成立しているか否かを判定する判定手段と、
前記判定手段によりクラッチカットオフ条件が成立していると判定された場合に、クラッチを解放するように前記クラッチの係合/解放を制御するクラッチ制御手段とを備えることを特徴とする作業車両のクラッチ制御装置。
【請求項6】
請求項5に記載の作業車両のクラッチ制御装置において、
前記クラッチカットオフ条件は、
前記アクセルペダルの踏み込み有りの場合よりも、前記アクセルペダルの踏み込み無しの場合の方が、低い制動力で前記クラッチが解放されるように定められていることを特徴とする作業車両のクラッチ制御装置。
【請求項7】
請求項5または6に記載の作業車両のクラッチ制御装置において、
トランスミッションの設定速度段を検出する速度段検出手段をさらに備え、
前記判定手段は、前記速度段検出手段によって検出される前記トランスミッションの設定速度段も加味してクラッチカットオフ条件が成立しているか否かを判定し、
前記クラッチカットオフ条件は、少なくとも1速の場合よりも2速の場合の方が、低い制動力で前記クラッチが解放されるように定められていることを特徴とする作業車両のクラッチ制御装置。
【請求項8】
作業車両の車速を検出する車速検出手段と、
作業車両の制動力を検出する制動力検出手段と、
前記車速検出手段によって検出される前記作業車両の車速、および、前記制動力検出手段によって検出される前記作業車両の制動力に基づいて、クラッチカットオフ条件が成立しているか否かを判定する判定手段と、
前記判定手段によりクラッチカットオフ条件が成立していると判定された場合に、クラッチを解放するように前記クラッチの係合/解放を制御するクラッチ制御手段とを備え、
前記クラッチカットオフ条件は、前記車速が高いほど、低い制動力で前記クラッチが解放されるように定められていることを特徴とする作業車両のクラッチ制御装置。
【請求項9】
請求項8に記載の作業車両のクラッチ制御装置において、
トランスミッションの設定速度段を検出する速度段検出手段をさらに備え、
前記判定手段は、前記速度段検出手段によって検出される前記トランスミッションの設定速度段も加味してクラッチカットオフ条件が成立しているか否かを判定し、
前記クラッチカットオフ条件は、少なくとも1速の場合よりも2速の場合の方が、低い制動力で前記クラッチが解放されるように定められていることを特徴とする作業車両のクラッチ制御装置。
【請求項10】
請求項1ないし9のいずれか1項に記載の作業車両のクラッチ制御装置において、
前記車速検出手段の異常を判定する異常判定手段をさらに備え、
前記異常判定手段により前記車速検出手段の異常が判定されたとき、前記アクセルペダル踏込判定手段によって判定される前記アクセルペダルの踏み込みの有無、および、前記車速検出手段によって検出される前記作業車両の車速に拘わらずに、所定の制動力で前記クラッチが解放されることを特徴とする作業車両のクラッチ制御装置。
【請求項11】
請求項1ないし10のいずれか1項に記載の作業車両のクラッチ制御装置において、
少なくとも、クラッチを低い制動力で解放する第1モードと、クラッチを高い制動力で解放する第2モードとの間で、クラッチカットオフ条件を選択可能なモード切替手段をさらに備えていることを特徴とする作業車両のクラッチ制御装置。
【請求項12】
請求項1ないし11のいずれか1項に記載の作業車両のクラッチ制御装置において、
複数の速度段を有するトランスミッションを備え、
前記判定手段は、前記トランスミッションが低速度段に設定されている場合にのみ、クラッチカットオフ条件が成立しているか否かを判定することを特徴とする作業車両のクラッチ制御装置。
【請求項1】
アクセルペダルの踏み込みの有無を判定するアクセルペダル踏込判定手段と、
作業車両の車速を検出する車速検出手段と、
作業車両の制動力を検出する制動力検出手段と、
前記アクセルペダル踏込判定手段によって判定される前記アクセルペダルの踏み込みの有無、前記車速検出手段によって検出される前記作業車両の車速、および、前記制動力検出手段によって検出される前記作業車両の制動力に基づいて、クラッチカットオフ条件が成立しているか否かを判定する判定手段と、
前記判定手段によりクラッチカットオフ条件が成立していると判定された場合に、クラッチを解放するように前記クラッチの係合/解放を制御するクラッチ制御手段とを備えることを特徴とする作業車両のクラッチ制御装置。
【請求項2】
請求項1に記載の作業車両のクラッチ制御装置において、
前記クラッチカットオフ条件は、
低速側では、前記アクセルペダルの踏み込み有りの場合よりも、前記アクセルペダルの踏み込み無しの場合の方が、低い制動力で前記クラッチが解放されるように定められていることを特徴とする作業車両のクラッチ制御装置。
【請求項3】
請求項1または2に記載の作業車両のクラッチ制御装置において、
前記クラッチカットオフ条件は、
前記アクセルペダルの踏み込み有りの場合では、前記車速が高いほど、低い制動力で前記クラッチが解放され、前記アクセルペダルの踏み込み無しの場合では、前記車速に拘わらず、所定の制動力で前記クラッチが解放されるように定められていることを特徴とする作業車両のクラッチ制御装置。
【請求項4】
請求項1ないし3のいずれか1項に記載の作業車両のクラッチ制御装置において、
トランスミッションの設定速度段を検出する速度段検出手段をさらに備え、
前記判定手段は、前記速度段検出手段によって検出される前記トランスミッションの設定速度段も加味してクラッチカットオフ条件が成立しているか否かを判定し、
前記クラッチカットオフ条件は、少なくとも1速の場合よりも2速の場合の方が、低い制動力で前記クラッチが解放されるように定められていることを特徴とする作業車両のクラッチ制御装置。
【請求項5】
アクセルペダルの踏み込みの有無を判定するアクセルペダル踏込判定手段と、
作業車両の制動力を検出する制動力検出手段と、
前記アクセルペダル踏込判定手段によって判定される前記アクセルペダルの踏み込みの有無、および、前記制動力検出手段によって検出される前記作業車両の制動力に基づいて、クラッチカットオフ条件が成立しているか否かを判定する判定手段と、
前記判定手段によりクラッチカットオフ条件が成立していると判定された場合に、クラッチを解放するように前記クラッチの係合/解放を制御するクラッチ制御手段とを備えることを特徴とする作業車両のクラッチ制御装置。
【請求項6】
請求項5に記載の作業車両のクラッチ制御装置において、
前記クラッチカットオフ条件は、
前記アクセルペダルの踏み込み有りの場合よりも、前記アクセルペダルの踏み込み無しの場合の方が、低い制動力で前記クラッチが解放されるように定められていることを特徴とする作業車両のクラッチ制御装置。
【請求項7】
請求項5または6に記載の作業車両のクラッチ制御装置において、
トランスミッションの設定速度段を検出する速度段検出手段をさらに備え、
前記判定手段は、前記速度段検出手段によって検出される前記トランスミッションの設定速度段も加味してクラッチカットオフ条件が成立しているか否かを判定し、
前記クラッチカットオフ条件は、少なくとも1速の場合よりも2速の場合の方が、低い制動力で前記クラッチが解放されるように定められていることを特徴とする作業車両のクラッチ制御装置。
【請求項8】
作業車両の車速を検出する車速検出手段と、
作業車両の制動力を検出する制動力検出手段と、
前記車速検出手段によって検出される前記作業車両の車速、および、前記制動力検出手段によって検出される前記作業車両の制動力に基づいて、クラッチカットオフ条件が成立しているか否かを判定する判定手段と、
前記判定手段によりクラッチカットオフ条件が成立していると判定された場合に、クラッチを解放するように前記クラッチの係合/解放を制御するクラッチ制御手段とを備え、
前記クラッチカットオフ条件は、前記車速が高いほど、低い制動力で前記クラッチが解放されるように定められていることを特徴とする作業車両のクラッチ制御装置。
【請求項9】
請求項8に記載の作業車両のクラッチ制御装置において、
トランスミッションの設定速度段を検出する速度段検出手段をさらに備え、
前記判定手段は、前記速度段検出手段によって検出される前記トランスミッションの設定速度段も加味してクラッチカットオフ条件が成立しているか否かを判定し、
前記クラッチカットオフ条件は、少なくとも1速の場合よりも2速の場合の方が、低い制動力で前記クラッチが解放されるように定められていることを特徴とする作業車両のクラッチ制御装置。
【請求項10】
請求項1ないし9のいずれか1項に記載の作業車両のクラッチ制御装置において、
前記車速検出手段の異常を判定する異常判定手段をさらに備え、
前記異常判定手段により前記車速検出手段の異常が判定されたとき、前記アクセルペダル踏込判定手段によって判定される前記アクセルペダルの踏み込みの有無、および、前記車速検出手段によって検出される前記作業車両の車速に拘わらずに、所定の制動力で前記クラッチが解放されることを特徴とする作業車両のクラッチ制御装置。
【請求項11】
請求項1ないし10のいずれか1項に記載の作業車両のクラッチ制御装置において、
少なくとも、クラッチを低い制動力で解放する第1モードと、クラッチを高い制動力で解放する第2モードとの間で、クラッチカットオフ条件を選択可能なモード切替手段をさらに備えていることを特徴とする作業車両のクラッチ制御装置。
【請求項12】
請求項1ないし11のいずれか1項に記載の作業車両のクラッチ制御装置において、
複数の速度段を有するトランスミッションを備え、
前記判定手段は、前記トランスミッションが低速度段に設定されている場合にのみ、クラッチカットオフ条件が成立しているか否かを判定することを特徴とする作業車両のクラッチ制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−104509(P2013−104509A)
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願番号】特願2011−250022(P2011−250022)
【出願日】平成23年11月15日(2011.11.15)
【出願人】(000005522)日立建機株式会社 (2,611)
【出願人】(509241041)株式会社KCM (35)
【Fターム(参考)】
【公開日】平成25年5月30日(2013.5.30)
【国際特許分類】
【出願日】平成23年11月15日(2011.11.15)
【出願人】(000005522)日立建機株式会社 (2,611)
【出願人】(509241041)株式会社KCM (35)
【Fターム(参考)】
[ Back to top ]