
作業車両の周辺監視装置
【課題】不要な警告を抑制可能な周辺監視装置を提供する。
【解決手段】周辺監視装置10は、警告領域設定部120と警告部140とを備える。警告領域設定部120は、ダンプトラック1の走行状態に応じて、障害物の存在を運転者に警告する必要のある警告領域を設定する。警告部140は、8台のレーダ装置21〜28のうち少なくとも1つのレーダ装置によって検知された障害物の相対位置が警告領域内に位置することを運転者に警告する。
【解決手段】周辺監視装置10は、警告領域設定部120と警告部140とを備える。警告領域設定部120は、ダンプトラック1の走行状態に応じて、障害物の存在を運転者に警告する必要のある警告領域を設定する。警告部140は、8台のレーダ装置21〜28のうち少なくとも1つのレーダ装置によって検知された障害物の相対位置が警告領域内に位置することを運転者に警告する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、作業車両の周囲を監視する周辺監視装置に関する。
【背景技術】
【0002】
従来、超大型の作業車両として、鉱山等で砕石を運搬するためのダンプトラックが広く用いられている。このようなダンプトラックは、一般的な車両に比較して著しく車幅が広く、また前後長が長いため、サイドミラー等によって作業車両周辺の状況を運転者が把握することは困難である。
【0003】
そこで、作業車両周辺の状況を運転者に簡便に把握させることを目的として、障害物検知センサと、モニタと、これらに接続されたコントローラと、を備える周辺監視システムが提案されている(特許文献1参照)。この周辺監視システムでは、障害物検知センサによって障害物が検知された場合に、障害物の存在をモニタに表示することによって、障害物の存在を運転者に警告するようになっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】US 2009/0259400 A1
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1のシステムでは、作業車両の走行状態に関わりなく障害物の存在が運転者に警告されるので、運転者にとって不要な警告がなされてしまう場合がある。例えば、作業車両を前進させている場合のように運転者が前方に注意を払いたいときであっても、車両後方の障害物の存在が運転者に警告されてしまう。
【0006】
本発明は、上述の状況に鑑みてなされたものであり、不要な警告を抑制可能な周辺監視装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
第1の態様に係る作業車両の周辺監視装置は、作業車両に装着され、作業車両の周囲の障害物を検知することによって、障害物の作業車両に対する相対位置をそれぞれ取得する複数の障害物検知センサと、作業車両の走行状態に応じて、障害物の存在を運転者に対して警告する必要のある警告領域を設定する警告領域設定部と、相対位置が警告領域内に位置することを運転者に警告する警告部と、を備える。
【0008】
第1の態様に係る作業車両の周辺監視装置によれば、作業車両の走行状態に応じて警告領域が設定されるので、走行状態に鑑みて障害物の存在を運転者に警告する必要性が低い場合に警告がなされることを抑制できる。
【0009】
第2の態様に係る作業車両の周辺監視装置は、第1の態様に係り、走行状態は、進行方向と車速の組み合わせによって規定される。
【0010】
第2の態様に係る作業車両の周辺監視装置によれば、作業車両の様々な走行状態に対応しつつ簡便に走行状態を判断することができる。
【0011】
第3の態様に係る作業車両の周辺監視装置は、第1又は第2の態様に係り、業車両に装着され、作業車両の周囲の画像をそれぞれ取得する複数のカメラと、複数のカメラによって取得される複数の画像に基づいて、作業車両の周囲の俯瞰画像を取得する俯瞰画像取得部と、を備える。警告部は、俯瞰画像上において相対位置が警告領域内に位置するか否かを判定する判定部を有する。
【0012】
第4の態様に係る作業車両の周辺監視装置は、第3の態様に係り、画像を表示可能なモニタを備える。警告部は、俯瞰画像上において相対位置が警告領域内に位置すると判定された場合に、複数のカメラのうち障害物を撮影しているカメラのカメラ画像をモニタに表示させる表示制御部を有する。
【0013】
第4の態様に係る作業車両の周辺監視装置によれば、障害物の存在を運転者に対して視覚的に警告することができるので、障害物の存在を運転者に容易に把握させることができる。
【0014】
第5の態様に係る作業車両の周辺監視装置は、第4の態様に係り、表示制御部は、俯瞰画像をカメラ画像と並べてモニタに表示させる。
【0015】
第5の態様に係る作業車両の周辺監視装置によれば、俯瞰画像において障害物の位置を運転者に視覚的に確認させることができるので、障害物の存在をより容易に運転者に把握させることができる。
【0016】
第6の態様に係る作業車両の周辺監視装置は、第5の態様に係り、表示制御部は、モニタに表示される俯瞰画像において障害物に識別用マークを重ねて表示させる。
【0017】
第6の態様に係る作業車両の周辺監視装置によれば、障害物をより目立たせることができるので、障害物の存在をより容易に運転者に把握させることができる。
【0018】
第7の態様に係る作業車両の周辺監視装置は、第5又は第6の態様に係り、表示制御部は、モニタに表示される俯瞰画像において障害物の周囲を取り囲む識別用フレームを表示させる。
【0019】
第7の態様に係る作業車両の周辺監視装置によれば、障害物をより目立たせることができるので、障害物の存在をより容易に運転者に把握させることができる。
【発明の効果】
【0020】
以上のような本発明では、不要な警告を抑制可能な周辺監視装置を提供することができる。
【図面の簡単な説明】
【0021】
【図1】ダンプトラック1の全体構成を示す斜視図。
【図2】ダンプトラック1が備える周辺監視装置10の構成を示すブロック図。
【図3】6台のカメラ11〜16の装着位置と撮影範囲とを示す上面図。
【図4】8台のレーダ装置21〜28の装着位置と検知範囲とを示す上面図。
【図5】警告領域を示す上面図。
【図6】周辺監視装置10の動作を説明するためのフロー図。
【図7】モニタ50における表示例を示す模式図。
【図8】警告領域を示す上面図。
【図9】警告領域を示す上面図。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態について、図面を参照しながら説明する。なお、以下の説明において、「前」「後」「左」「右」とは、運転席に着座した運転者を基準とする用語であり、「車幅方向」は、「左右方向」と同義である。
【0023】
[ダンプトラックの全体構成]
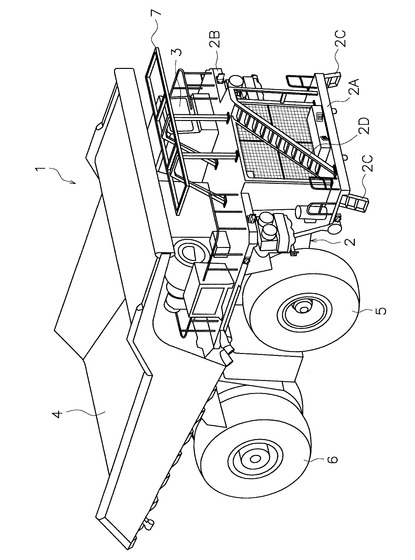
図1は、ダンプトラック1の全体構成を示す斜視図である。ダンプトラック1は、鉱山作業などに用いられる自走式の超大型作業車両である。
【0024】
ダンプトラック1は主に、車体フレーム2と、キャブ3と、ベッセル4と、それぞれ2つの前輪5及び後輪6と、ベース7と、を備える。また、このダンプトラック1は、車両の周囲を監視して、その結果をモニタに表示する周辺監視装置10を備える。周辺監視装置10の構成及び動作については後述する。
【0025】
車体フレーム2は、図示しないディーゼルエンジンやトランスミッション等の動力機構やその他の補機類を支持している。また、車体フレーム2の前部左右に前輪5(図1では右前輪のみ図示)が支持され、後部左右に後輪6(図1では右後輪のみ図示)が支持されている。車体フレーム2は、地面に近い側にロアデッキ2Aを有し、ロアデッキ2Aの上方にアッパデッキ2Bを有している。ロアデッキ2Aと地面との間には例えば可動式ラダー2Cが2つ設けられ、ロアデッキ2Aとアッパデッキ2Bとの間には斜めラダー2Dが設けられている。アッパデッキ2B上には、前部の左右、側部、及び後部の一部に柵状の手すりが固定されている。
【0026】
キャブは、アッパデッキ2B上において、車幅方向の中央から左側に偏倚して配置されている。このキャブ3内には、運転席、シフトレバー、コントローラ、モニタ、ハンドル、アクセルペダル、ブレーキペダル等が設けられている。後述するように、コントローラ、表示部およびシフトレバーは周辺監視装置10の一部を構成する。
【0027】
ベッセル4は、砕石等の重量物を積載するための容器である。ベッセル4の後側の底部は、回動ピン(図示せず)を介して、車体フレーム2の後端部に回動可能に連結されている。これにより、ベッセル4は、図示しない油圧シリンダ等のアクチュエータによって、前部が上方に回動して積載物を排出する起立姿勢と、図1に示すように前部がキャブの上部に位置する積載姿勢と、を取り得る。
【0028】
ベース7は、アッパデッキ2B上に配置される。ベース7は、トロリー用の架線から電力を受電するパンタグラフを設置するための給電装置である。
【0029】
[周辺監視装置10の構成]
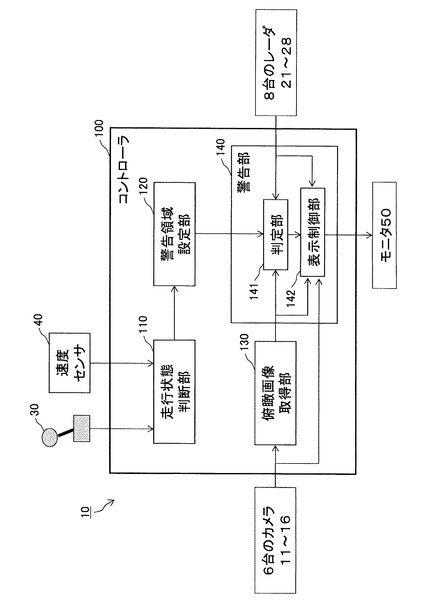
図2は、ダンプトラック1が備える周辺監視装置10の構成を示すブロック図である。周辺監視装置10は、6台のカメラ11〜16と、8台のレーダ装置21〜28と、シフトレバー30と、車速センサ40と、モニタ50と、コントローラ100と、を有する。
【0030】
(1)6台のカメラ11〜16
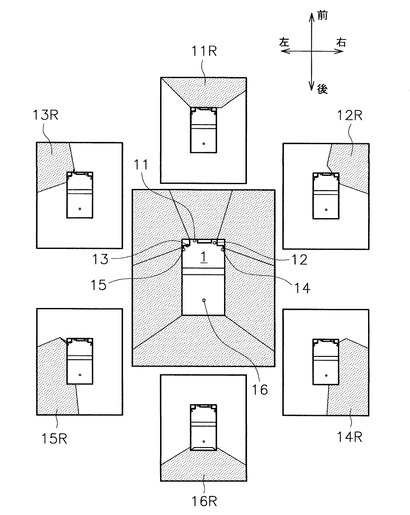
6台のカメラ11〜16は、ダンプトラック1の周囲の画像を取得する。6台のカメラ11〜16は、ダンプトラック1の外周に装着される。図3は、6台のカメラ11〜16の装着位置と撮影範囲とを示すダンプトラック1の上面図である。ただし、図3では、後述する俯瞰画像200(図7参照)に用いられる範囲における撮影範囲が示されている。
【0031】
第1カメラ11は斜めラダー2Dの上端部に配置され、その第1撮影範囲11Rは車両前方である。第2カメラ12はアッパデッキ2Bの前側面右端部に配置され、その第2撮影範囲12Rは車両右斜め前方である。第3カメラ13は第2カメラ12と左右対称位置、すなわちアッパデッキ2Bの前側面左端部に配置され、その第3撮影範囲13Rは左斜め前方である。第4カメラ14はアッパデッキ2Bの右側面前端部に配置され、その第4撮影範囲14Rは右斜め後方である。第5カメラ15は第4カメラと左右対称位置、すなわちアッパデッキ2Bの左側面前端部に配置され、その第5撮影範囲15Rは左斜め後方である。第6カメラ16は2つの後輪6を連結するアクスル軸上方で、ベッセル4の回動軸付近に配置され、その第6撮影範囲16Rは後方である。
【0032】
以上の6台のカメラ11〜16によれば、図3の中央図に示すように、ダンプトラック1のほぼ全周囲の画像を取得することができる。6台のカメラ11〜16のそれぞれは、自装置が撮影した画像を示す画像データをコントローラ100に送信する。
【0033】
(2)8台のレーダ装置21〜28
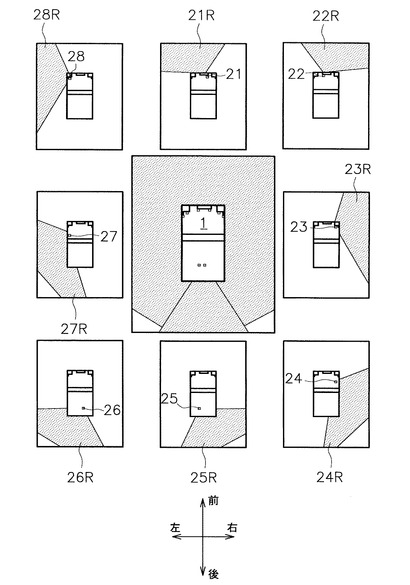
8台のレーダ装置21〜28は、ダンプトラック1の周囲に存在する障害物の相対位置を検知する。8台のレーダ装置21〜28は、ダンプトラック1の外周に装着される。図4は、8台のレーダ装置21〜28の装着位置と検知範囲とを示すダンプトラック1の上面図である。ただし、図4では、後述する俯瞰画像200(図7参照)に用いられる範囲における検知範囲が示されている。
【0034】
第1レーダ装置21はロアデッキ2A上に配置され、その第1検知範囲21Rは車両前方から左斜め前方である。第2レーダ装置22は第1レーダ装置21の左側に配置され、その第2検知範囲22Rは車両前方から右斜め前方である。第3レーダ装置23はロアデッキ2Aの右側面前端部に配置され、その第3検知範囲23Rは右斜め前方から右方である。第4レーダ装置24は車両側方のロアデッキ2Aとアッパデッキ2Bの中間に配置され、その第4検知範囲24Rは右方から後方である。第5レーダ装置25は2つの後輪6を連結するアクスル軸付近に配置され、その第5検知範囲25Rは右斜め後方から後方である。第6レーダ装置26は第5レーダ装置25の右側に配置され、その第6検知範囲25Rは後方から左斜め後方である。第7レーダ装置27は第4レーダ装置24と左右対称位置に配置され、その第7検知範囲27Rは後方から左方である。第8レーダ装置28は第3レーダ装置23と左右対称位置に配置され、その第8検知範囲28Rは左方から左斜め前方である。
【0035】
以上の8台のレーダ装置21〜28によれば、図4の中央図に示すように、ダンプトラック1のほぼ全周囲に渡って、ダンプトラック1に対する障害物の相対位置を検知することができる。8台のレーダ装置21〜28のそれぞれは、自装置が検知した障害物の相対位置を示す相対位置データをコントローラ100に送信する。
【0036】
(3)シフトレバー30、車速センサ40およびモニタ50
シフトレバー30は、キャブ3内において運転席周辺に配置される。シフトレバー30は、オペレータがダンプトラック1の進行方向や速度段を切り換えるための操作具である。本実施形態において、シフトレバー30は、前進および後進のいずれに位置するかを示すシフトレバー位置データをコントローラ100に送信する。
【0037】
車速センサ40は、ダンプトラック1の車速を取得する。車速センサ40は、エンジンの回転数などに基づいてダンプトラック1の車速を取得可能である。車速センサ40は、取得した車速を示す車速データをコントローラ100に送信する。
【0038】
モニタ50は、キャブ3内において運転席前方に配置される。モニタ50は、コントローラ100の制御に応じて画像を表示可能である。モニタ50における表示例については後述する。
【0039】
(4)コントローラ100
コントローラ100は、ダンプトラック1の周囲における障害物の有無を監視し、必要に応じて障害物の存在を運転者に警告する。図2に示すように、コントローラ100は、走行状態判断部110と、警告領域設定部120と、俯瞰画像取得部130と、警告部140と、を備える。
【0040】
走行状態判断部110は、シフトレバー30からシフトレバー位置データを受信し、車速センサ40から車速データを受信する。走行状態判断部110は、進行方向と車速との組み合わせに基づいて、ダンプトラック1の走行状態を判断する。
【0041】
ここで、走行状態は、進行方向が前進で車速が0より大きい場合には“前進中”と規定され、進行方向が後進で車速が0より大きい場合には“後進中”と規定され、車速が0である場合には進行方向に関わらず“停車中”と規定されている。走行状態判断部110は、走行状態を示す走行状態データを警告領域設定部120に送信する。
【0042】
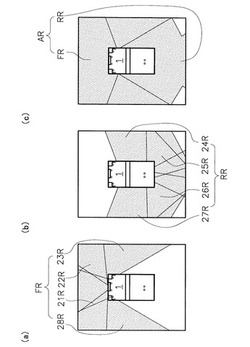
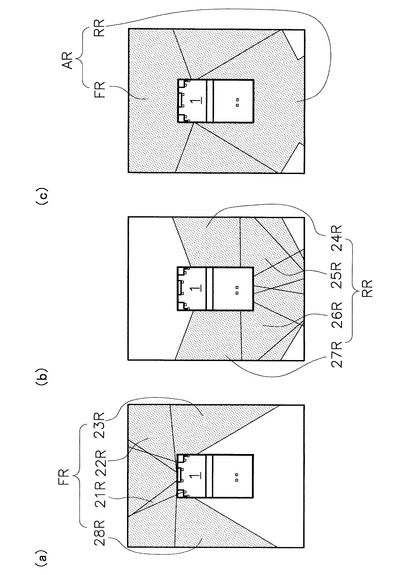
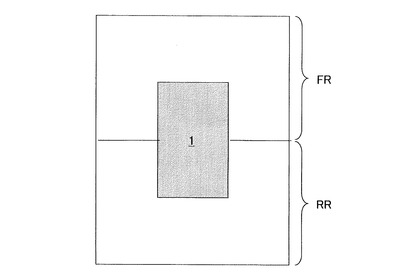
警告領域設定部120は、走行状態判断部110から走行状態データを受信する。警告領域設定部120は、ダンプトラック1の走行状態に応じて、障害物の存在を運転者に警告する必要のある警告領域を設定する。図5(a)〜図5(c)は、警告領域を示す上面図である。
【0043】
警告領域設定部120は、ダンプトラック1の走行状態が“前進中”である場合には、図5(a)に示すように、前方領域FRを警告領域として設定する。本実施形態において、前方領域FRは、第1検知範囲21R、第2検知範囲22R、第3検知範囲23Rおよび第8検知範囲28Rを合わせた領域である。また、警告領域設定部120は、ダンプトラック1の走行状態が“後進中”である場合には、図5(b)に示すように、後方領域RRを警告領域として設定する。本実施形態において、後方領域RRは、第4検知範囲24R、第5検知範囲25R、第6検知範囲26Rおよび第7検知範囲27Rを合わせた領域である。また、警告領域設定部120は、ダンプトラック1の走行状態が“停車中”である場合には、図5(c)に示すように、全領域ARを警告領域として設定する。本実施形態において、全領域ARは、前方領域FRと後方領域RRとを合わせた領域である。警告領域設定部120は、設定した警告領域を示す警告領域データを警告部140に送信する。
【0044】
俯瞰画像取得部130は、6台のカメラ11〜16それぞれから複数の画像データを受信する。俯瞰画像取得部130は、複数の画像データによって示される複数の画像に基づいて、ダンプトラック1の周囲の俯瞰画像200(図7参照)を取得する。具体的に、俯瞰画像取得部130は、複数の画像データそれぞれを座標変換することによって、複数の画像を所定の投影面上に投影させた俯瞰画像200を示す俯瞰画像データを生成する。俯瞰画像取得部130は、生成した俯瞰画像データを警告部140に送信する。
【0045】
警告部140は、8台のレーダ装置21〜28のうち少なくとも1つのレーダ装置によって検知された障害物の相対位置が警告領域内に位置することを運転者に警告する。図2に示すように、警告部140は、判定部141と、表示制御部142と、を有する。
【0046】
判定部141は、警告領域設定部120から警告領域データを受信し、俯瞰画像取得部130から俯瞰画像データを受信し、8台のレーダ装置21〜28から相対位置データを受信する。判定部141は、8台のレーダ装置21〜28からの相対位置データの受信の有無に基づいて、8台のレーダ装置21〜28のうち少なくとも1つのレーダ装置が障害物を検知したか否かを判定する。
【0047】
また、判定部141は、少なくとも1つのレーダ装置によって障害物が検知されたと判定した場合、俯瞰画像200上において障害物の相対位置が警告領域内に位置するか否かを判定する。判定部141は、障害物の相対位置が警告領域内に位置すると判定した場合、その旨を表示制御部142に通知する。
【0048】
表示制御部142は、6台のカメラ11〜16それぞれから複数の画像データを受信し、俯瞰画像取得部130から俯瞰画像データを受信し、8台のレーダ装置21〜28から相対位置データを受信する。
【0049】
表示制御部142は、判定部141から通知を受けない場合(すなわち、通常時)には、6台のカメラ11〜16のうち所定カメラの画像(「所定カメラ画像210」という。図7(a)(c)参照)と俯瞰画像200とを並べてモニタ50に表示させる。所定カメラは、ダンプトラック1の走行状態に応じて選択されることが好ましい。例えば、前進中には第2撮影範囲12Rを撮影する第2カメラ12であることが好ましく、後進中には第6撮影範囲16Rを撮影する第6カメラ16であることが好ましい。
【0050】
一方、表示制御部142は、障害物の相対位置が警告領域内に位置すると判定部141によって判定された場合には、6台のカメラ11〜16のうち検知された障害物を撮影しているカメラの画像(「障害物撮影カメラ画像220」という)を俯瞰画像200と並べてモニタ50に表示させる。
【0051】
また、表示制御部142は、モニタ50に表示される俯瞰画像200において、検知された障害物に識別用マークM(図7参照)を重ねて表示させる。識別用マークMは、俯瞰画像200上において障害物を視覚的に目立たせるための印であり、丸印、四角印、三角印などを用いることができる。
【0052】
また、表示制御部142は、モニタ50に表示される俯瞰画像200において、検知された障害物の周囲を取り囲む識別用フレームN(図7参照)を表示させる。識別用フレームNは、俯瞰画像200上において障害物の位置を容易に特定するための枠であり、枠の大きさや形などは適宜設定可能である。本実施形態では、後述するように、障害物撮影カメラの撮影領域(第1乃至第6撮影範囲11R〜12Rのいずれか1つ)の外縁が識別用フレームNとして設定されている。
【0053】
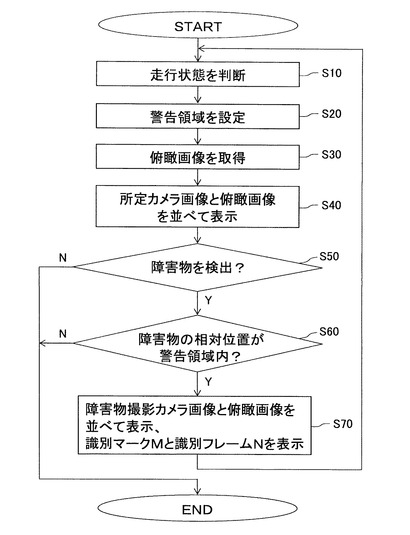
[周辺監視装置10の動作]
図6は、周辺監視装置10の動作を説明するためのフロー図である。図7は、モニタ50における表示例を示す模式図である。以下の説明では、運転者がダンプトラック1を前進させているものとする。
【0054】
ステップS10において、走行状態判断部110は、進行方向と車速を有することの組み合わせに基づいて、ダンプトラック1の走行状態を判断する。ここでは、ダンプトラック1の走行状態は、“前進中”と判断される。
【0055】
ステップS20において、警告領域設定部120は、ダンプトラック1の走行状態に応じて、障害物の存在を運転者に警告する必要のある警告領域を設定する。ステップS20では、走行状態が“前進中”であるので、前方領域FRが警告領域として設定される。
【0056】
ステップS30において、俯瞰画像取得部130は、6台のカメラ11〜16によって取得される複数の画像に基づいて、ダンプトラック1の周囲の俯瞰画像200を取得する。
【0057】
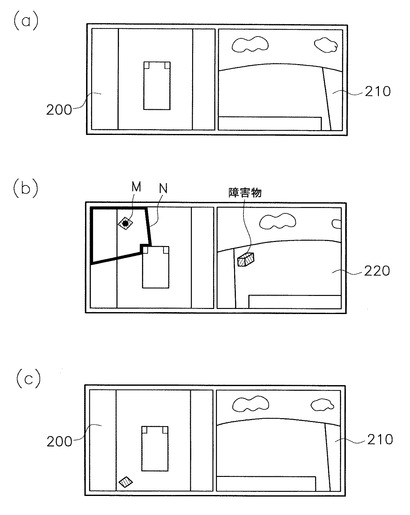
ステップS40において、表示制御部142は、俯瞰画像200と所定カメラ画像210とを並べてモニタ50に表示させる。図7(a)は、ステップS40における表示例を示す模式図である。図7(a)に示すように、モニタ50には、俯瞰画像200と所定カメラ画像210とが横に並んで表示されている。図7(a)に示される所定カメラ画像210は、第2撮影範囲12Rを撮影する第2カメラ12のリアルタイム画像である。
【0058】
ステップS50において、判定部141は、8台のレーダ装置21〜28のうち少なくとも1つのレーダ装置が障害物を検知したか否かを判定する。8台のレーダ装置21〜28のいずれかが障害物を検知した場合、処理はステップS60に進む。8台のレーダ装置21〜28のいずれもが障害物を検知しない場合、処理は一旦終了して新たな処理に移行する。
【0059】
ステップS60において、判定部141は、俯瞰画像200上において障害物の相対位置が警告領域(ここでは、前方領域FR)内に位置するか否かを判定する。俯瞰画像200上において障害物の相対位置が警告領域内に位置する場合には、処理はステップS60に進む。俯瞰画像200上において障害物の相対位置が警告領域内に位置しない場合、処理は終了して次回処理に移行する。
【0060】
ステップS70において、表示制御部142は、障害物撮影カメラ画像220を俯瞰画像200と並べてモニタ50に表示させる。また、表示制御部142は、モニタ50に表示される俯瞰画像200において、障害物に識別用マークMを重ねて表示するとともに、障害物の周囲を取り囲む識別用フレームNを表示する。図7(b)は、ステップS70における表示例を示す模式図である。図7(b)に示すように、モニタ50には、障害物撮影カメラ画像220が俯瞰画像200と並んで表示されている。図7(b)に示される障害物撮影カメラ画像220は、第3撮影範囲13Rを撮影する第3カメラ13のリアルタイム画像である。
【0061】
その後、ステップS10〜S70が繰り返し実行されるが、ステップS50において障害物が検知されない場合、或いは、ステップS60において障害物の相対位置が警告領域内から外れた場合、処理は一旦終了して新たな処理に移行する。図7(c)は、次回処理のステップS40における表示例を示す模式図である。障害物がダンプトラック1の後方に移動して警告領域から外れたことに応じて、図7(c)では、所定カメラ画像210が表示される状態に戻っている。
【0062】
[作用及び効果]
(1)周辺監視装置10は、警告領域設定部120と警告部140とを備える。警告領域設定部120は、ダンプトラック1の走行状態に応じて、障害物の存在を運転者に警告する必要のある警告領域を設定する。警告部140は、8台のレーダ装置21〜28のうち少なくとも1つのレーダ装置によって検知された障害物の相対位置が警告領域内に位置することを運転者に警告する。
【0063】
このように、ダンプトラック1の走行状態に応じて警告領域が設定されるので、走行状態に鑑みて障害物の存在を運転者に警告する必要性が低い場合に警告がなされることを抑制できる。
【0064】
(2)ダンプトラック1の走行状態は、進行方向と車速を有することの組み合わせによって規定される。
【0065】
そのため、ダンプトラック1の様々な走行状態に対応しつつ簡便に走行状態を判断することができる。
【0066】
(3)警告部140は、表示制御部142を有する。表示制御部142は、障害物の相対位置が警告領域内に位置すると判定部141によって判定された場合には、障害物撮影カメラ画像220をモニタ50に表示させる。
【0067】
このように、障害物の存在を運転者に対して視覚的に警告することができるので、障害物の存在を運転者に容易に把握させることができる。
【0068】
(4)表示制御部142は、俯瞰画像200を障害物撮影カメラ画像220と並べてモニタ50に表示させる。
【0069】
従って、俯瞰画像200において障害物の位置を運転者に視覚的に確認させることができるので、障害物の存在を運転者により容易に把握させることができる。
【0070】
(5)表示制御部142は、モニタ50に表示される俯瞰画像200において、障害物に識別用マークMを重ねて表示する。また、表示制御部142は、モニタ50に表示される俯瞰画像200において、障害物の周囲を取り囲む識別用フレームNを表示する。
【0071】
従って、障害物をより目立たせることができるので、障害物の存在をより容易に運転者に把握させることができる。
【0072】
(その他の実施形態)
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。
【0073】
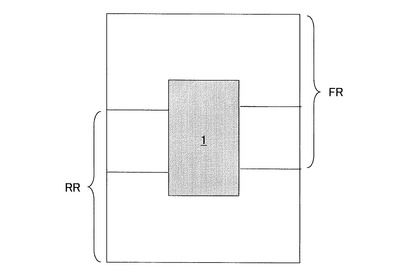
(A)上記実施形態において、警告領域は、図5に示すように、前方領域FRと後方領域RRとに分けられることとしたが、これに限られるものではない。警告領域は、3以上の領域に分けられていてもよい。また、図8に示すように、前方領域FRと後方領域RRとの境界は、任意の位置に設定することができる。さらに、図9に示すように、前方領域FRと後方領域RRとは、互いに一部が重なっていてもよい。
【0074】
(B)上記実施形態において、警告部140は、障害物撮影カメラ画像220をモニタ50に表示させることによって、障害物の相対位置が警告領域内に位置することを運転者に警告することとしたが、これに限られるものではない。警告部140は、モニタ50における画像の表示に代えてスピーカから警告音を鳴らすことによって運転者に警告してもよい。また、警告部140は、モニタ50における画像の表示に代えて発光器を光らせることによって運転者に警告してもよい。
【0075】
(C)上記実施形態において、表示制御部142は、俯瞰画像200を障害物撮影カメラ画像220と並べてモニタ50に表示させることとしたが、これに限られるものではない。表示制御部142は、障害物撮影カメラ画像220のみをモニタ50に表示させてもよい。
【0076】
(D)上記実施形態において、表示制御部142は、識別用マークMおよび識別用フレームNを俯瞰画像200に表示することとしたが、これに限られるものではない。表示制御部142は、識別用マークMおよび識別用フレームNを俯瞰画像200に表示しなくてもよい。
【0077】
(E)上記実施形態において、表示制御部142は、障害物撮影カメラの撮影領域の外縁を識別用フレームNとして設定することとしたが、これに限られるものではない。識別用フレームNは、識別用マークMよりも大きければよく、その大きさや形に制限はない。
【0078】
(F)上記実施形態において特に触れていないが、走行状態に応じて8台のレーダ装置21〜28のうちいくつかのレーダ装置の電源をOFFすることによって、警告領域を設定することができる。この場合には、電源をONされているレーダ装置の検知範囲が警告領域と一致することとなる。なお、電源をOFFされたレーダ装置からは相対位置データ自体が出力されない。そのため、警告部140が相対位置データを取得することは、すなわち、障害物が警告領域内に位置することを意味するので、警告部140は判定部141を有していなくてもよい。
【0079】
(G)上記実施形態において、ダンプトラック1は、ベース7を備えることとしたが備えていなくてもよい。
【符号の説明】
【0080】
1…ダンプトラック、2…フレーム、2A…ロアデッキ、2B…アッパデッキ、2C…可動式ラダー、2D…斜めラダー、3…キャブ、4…ベッセル、5…前輪、6…後輪、10…周辺監視装置、11〜16…6台のカメラ、21〜28…8台のレーダ装置、30…シフトレバー、40…車速センサ、50…モニタ、100…コントローラ、110…走行状態判断部、120…警告領域設定部、130…俯瞰画像取得部、140…警告部、141…判定部、142…表示制御部、200…俯瞰画像、210…所定カメラ画像、220…障害物撮影カメラ画像、FR…前方領域、RR…後方領域、AR…全領域、M…識別用マーク、N…識別用フレーム
【技術分野】
【0001】
本発明は、作業車両の周囲を監視する周辺監視装置に関する。
【背景技術】
【0002】
従来、超大型の作業車両として、鉱山等で砕石を運搬するためのダンプトラックが広く用いられている。このようなダンプトラックは、一般的な車両に比較して著しく車幅が広く、また前後長が長いため、サイドミラー等によって作業車両周辺の状況を運転者が把握することは困難である。
【0003】
そこで、作業車両周辺の状況を運転者に簡便に把握させることを目的として、障害物検知センサと、モニタと、これらに接続されたコントローラと、を備える周辺監視システムが提案されている(特許文献1参照)。この周辺監視システムでは、障害物検知センサによって障害物が検知された場合に、障害物の存在をモニタに表示することによって、障害物の存在を運転者に警告するようになっている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】US 2009/0259400 A1
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1のシステムでは、作業車両の走行状態に関わりなく障害物の存在が運転者に警告されるので、運転者にとって不要な警告がなされてしまう場合がある。例えば、作業車両を前進させている場合のように運転者が前方に注意を払いたいときであっても、車両後方の障害物の存在が運転者に警告されてしまう。
【0006】
本発明は、上述の状況に鑑みてなされたものであり、不要な警告を抑制可能な周辺監視装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
第1の態様に係る作業車両の周辺監視装置は、作業車両に装着され、作業車両の周囲の障害物を検知することによって、障害物の作業車両に対する相対位置をそれぞれ取得する複数の障害物検知センサと、作業車両の走行状態に応じて、障害物の存在を運転者に対して警告する必要のある警告領域を設定する警告領域設定部と、相対位置が警告領域内に位置することを運転者に警告する警告部と、を備える。
【0008】
第1の態様に係る作業車両の周辺監視装置によれば、作業車両の走行状態に応じて警告領域が設定されるので、走行状態に鑑みて障害物の存在を運転者に警告する必要性が低い場合に警告がなされることを抑制できる。
【0009】
第2の態様に係る作業車両の周辺監視装置は、第1の態様に係り、走行状態は、進行方向と車速の組み合わせによって規定される。
【0010】
第2の態様に係る作業車両の周辺監視装置によれば、作業車両の様々な走行状態に対応しつつ簡便に走行状態を判断することができる。
【0011】
第3の態様に係る作業車両の周辺監視装置は、第1又は第2の態様に係り、業車両に装着され、作業車両の周囲の画像をそれぞれ取得する複数のカメラと、複数のカメラによって取得される複数の画像に基づいて、作業車両の周囲の俯瞰画像を取得する俯瞰画像取得部と、を備える。警告部は、俯瞰画像上において相対位置が警告領域内に位置するか否かを判定する判定部を有する。
【0012】
第4の態様に係る作業車両の周辺監視装置は、第3の態様に係り、画像を表示可能なモニタを備える。警告部は、俯瞰画像上において相対位置が警告領域内に位置すると判定された場合に、複数のカメラのうち障害物を撮影しているカメラのカメラ画像をモニタに表示させる表示制御部を有する。
【0013】
第4の態様に係る作業車両の周辺監視装置によれば、障害物の存在を運転者に対して視覚的に警告することができるので、障害物の存在を運転者に容易に把握させることができる。
【0014】
第5の態様に係る作業車両の周辺監視装置は、第4の態様に係り、表示制御部は、俯瞰画像をカメラ画像と並べてモニタに表示させる。
【0015】
第5の態様に係る作業車両の周辺監視装置によれば、俯瞰画像において障害物の位置を運転者に視覚的に確認させることができるので、障害物の存在をより容易に運転者に把握させることができる。
【0016】
第6の態様に係る作業車両の周辺監視装置は、第5の態様に係り、表示制御部は、モニタに表示される俯瞰画像において障害物に識別用マークを重ねて表示させる。
【0017】
第6の態様に係る作業車両の周辺監視装置によれば、障害物をより目立たせることができるので、障害物の存在をより容易に運転者に把握させることができる。
【0018】
第7の態様に係る作業車両の周辺監視装置は、第5又は第6の態様に係り、表示制御部は、モニタに表示される俯瞰画像において障害物の周囲を取り囲む識別用フレームを表示させる。
【0019】
第7の態様に係る作業車両の周辺監視装置によれば、障害物をより目立たせることができるので、障害物の存在をより容易に運転者に把握させることができる。
【発明の効果】
【0020】
以上のような本発明では、不要な警告を抑制可能な周辺監視装置を提供することができる。
【図面の簡単な説明】
【0021】
【図1】ダンプトラック1の全体構成を示す斜視図。
【図2】ダンプトラック1が備える周辺監視装置10の構成を示すブロック図。
【図3】6台のカメラ11〜16の装着位置と撮影範囲とを示す上面図。
【図4】8台のレーダ装置21〜28の装着位置と検知範囲とを示す上面図。
【図5】警告領域を示す上面図。
【図6】周辺監視装置10の動作を説明するためのフロー図。
【図7】モニタ50における表示例を示す模式図。
【図8】警告領域を示す上面図。
【図9】警告領域を示す上面図。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態について、図面を参照しながら説明する。なお、以下の説明において、「前」「後」「左」「右」とは、運転席に着座した運転者を基準とする用語であり、「車幅方向」は、「左右方向」と同義である。
【0023】
[ダンプトラックの全体構成]
図1は、ダンプトラック1の全体構成を示す斜視図である。ダンプトラック1は、鉱山作業などに用いられる自走式の超大型作業車両である。
【0024】
ダンプトラック1は主に、車体フレーム2と、キャブ3と、ベッセル4と、それぞれ2つの前輪5及び後輪6と、ベース7と、を備える。また、このダンプトラック1は、車両の周囲を監視して、その結果をモニタに表示する周辺監視装置10を備える。周辺監視装置10の構成及び動作については後述する。
【0025】
車体フレーム2は、図示しないディーゼルエンジンやトランスミッション等の動力機構やその他の補機類を支持している。また、車体フレーム2の前部左右に前輪5(図1では右前輪のみ図示)が支持され、後部左右に後輪6(図1では右後輪のみ図示)が支持されている。車体フレーム2は、地面に近い側にロアデッキ2Aを有し、ロアデッキ2Aの上方にアッパデッキ2Bを有している。ロアデッキ2Aと地面との間には例えば可動式ラダー2Cが2つ設けられ、ロアデッキ2Aとアッパデッキ2Bとの間には斜めラダー2Dが設けられている。アッパデッキ2B上には、前部の左右、側部、及び後部の一部に柵状の手すりが固定されている。
【0026】
キャブは、アッパデッキ2B上において、車幅方向の中央から左側に偏倚して配置されている。このキャブ3内には、運転席、シフトレバー、コントローラ、モニタ、ハンドル、アクセルペダル、ブレーキペダル等が設けられている。後述するように、コントローラ、表示部およびシフトレバーは周辺監視装置10の一部を構成する。
【0027】
ベッセル4は、砕石等の重量物を積載するための容器である。ベッセル4の後側の底部は、回動ピン(図示せず)を介して、車体フレーム2の後端部に回動可能に連結されている。これにより、ベッセル4は、図示しない油圧シリンダ等のアクチュエータによって、前部が上方に回動して積載物を排出する起立姿勢と、図1に示すように前部がキャブの上部に位置する積載姿勢と、を取り得る。
【0028】
ベース7は、アッパデッキ2B上に配置される。ベース7は、トロリー用の架線から電力を受電するパンタグラフを設置するための給電装置である。
【0029】
[周辺監視装置10の構成]
図2は、ダンプトラック1が備える周辺監視装置10の構成を示すブロック図である。周辺監視装置10は、6台のカメラ11〜16と、8台のレーダ装置21〜28と、シフトレバー30と、車速センサ40と、モニタ50と、コントローラ100と、を有する。
【0030】
(1)6台のカメラ11〜16
6台のカメラ11〜16は、ダンプトラック1の周囲の画像を取得する。6台のカメラ11〜16は、ダンプトラック1の外周に装着される。図3は、6台のカメラ11〜16の装着位置と撮影範囲とを示すダンプトラック1の上面図である。ただし、図3では、後述する俯瞰画像200(図7参照)に用いられる範囲における撮影範囲が示されている。
【0031】
第1カメラ11は斜めラダー2Dの上端部に配置され、その第1撮影範囲11Rは車両前方である。第2カメラ12はアッパデッキ2Bの前側面右端部に配置され、その第2撮影範囲12Rは車両右斜め前方である。第3カメラ13は第2カメラ12と左右対称位置、すなわちアッパデッキ2Bの前側面左端部に配置され、その第3撮影範囲13Rは左斜め前方である。第4カメラ14はアッパデッキ2Bの右側面前端部に配置され、その第4撮影範囲14Rは右斜め後方である。第5カメラ15は第4カメラと左右対称位置、すなわちアッパデッキ2Bの左側面前端部に配置され、その第5撮影範囲15Rは左斜め後方である。第6カメラ16は2つの後輪6を連結するアクスル軸上方で、ベッセル4の回動軸付近に配置され、その第6撮影範囲16Rは後方である。
【0032】
以上の6台のカメラ11〜16によれば、図3の中央図に示すように、ダンプトラック1のほぼ全周囲の画像を取得することができる。6台のカメラ11〜16のそれぞれは、自装置が撮影した画像を示す画像データをコントローラ100に送信する。
【0033】
(2)8台のレーダ装置21〜28
8台のレーダ装置21〜28は、ダンプトラック1の周囲に存在する障害物の相対位置を検知する。8台のレーダ装置21〜28は、ダンプトラック1の外周に装着される。図4は、8台のレーダ装置21〜28の装着位置と検知範囲とを示すダンプトラック1の上面図である。ただし、図4では、後述する俯瞰画像200(図7参照)に用いられる範囲における検知範囲が示されている。
【0034】
第1レーダ装置21はロアデッキ2A上に配置され、その第1検知範囲21Rは車両前方から左斜め前方である。第2レーダ装置22は第1レーダ装置21の左側に配置され、その第2検知範囲22Rは車両前方から右斜め前方である。第3レーダ装置23はロアデッキ2Aの右側面前端部に配置され、その第3検知範囲23Rは右斜め前方から右方である。第4レーダ装置24は車両側方のロアデッキ2Aとアッパデッキ2Bの中間に配置され、その第4検知範囲24Rは右方から後方である。第5レーダ装置25は2つの後輪6を連結するアクスル軸付近に配置され、その第5検知範囲25Rは右斜め後方から後方である。第6レーダ装置26は第5レーダ装置25の右側に配置され、その第6検知範囲25Rは後方から左斜め後方である。第7レーダ装置27は第4レーダ装置24と左右対称位置に配置され、その第7検知範囲27Rは後方から左方である。第8レーダ装置28は第3レーダ装置23と左右対称位置に配置され、その第8検知範囲28Rは左方から左斜め前方である。
【0035】
以上の8台のレーダ装置21〜28によれば、図4の中央図に示すように、ダンプトラック1のほぼ全周囲に渡って、ダンプトラック1に対する障害物の相対位置を検知することができる。8台のレーダ装置21〜28のそれぞれは、自装置が検知した障害物の相対位置を示す相対位置データをコントローラ100に送信する。
【0036】
(3)シフトレバー30、車速センサ40およびモニタ50
シフトレバー30は、キャブ3内において運転席周辺に配置される。シフトレバー30は、オペレータがダンプトラック1の進行方向や速度段を切り換えるための操作具である。本実施形態において、シフトレバー30は、前進および後進のいずれに位置するかを示すシフトレバー位置データをコントローラ100に送信する。
【0037】
車速センサ40は、ダンプトラック1の車速を取得する。車速センサ40は、エンジンの回転数などに基づいてダンプトラック1の車速を取得可能である。車速センサ40は、取得した車速を示す車速データをコントローラ100に送信する。
【0038】
モニタ50は、キャブ3内において運転席前方に配置される。モニタ50は、コントローラ100の制御に応じて画像を表示可能である。モニタ50における表示例については後述する。
【0039】
(4)コントローラ100
コントローラ100は、ダンプトラック1の周囲における障害物の有無を監視し、必要に応じて障害物の存在を運転者に警告する。図2に示すように、コントローラ100は、走行状態判断部110と、警告領域設定部120と、俯瞰画像取得部130と、警告部140と、を備える。
【0040】
走行状態判断部110は、シフトレバー30からシフトレバー位置データを受信し、車速センサ40から車速データを受信する。走行状態判断部110は、進行方向と車速との組み合わせに基づいて、ダンプトラック1の走行状態を判断する。
【0041】
ここで、走行状態は、進行方向が前進で車速が0より大きい場合には“前進中”と規定され、進行方向が後進で車速が0より大きい場合には“後進中”と規定され、車速が0である場合には進行方向に関わらず“停車中”と規定されている。走行状態判断部110は、走行状態を示す走行状態データを警告領域設定部120に送信する。
【0042】
警告領域設定部120は、走行状態判断部110から走行状態データを受信する。警告領域設定部120は、ダンプトラック1の走行状態に応じて、障害物の存在を運転者に警告する必要のある警告領域を設定する。図5(a)〜図5(c)は、警告領域を示す上面図である。
【0043】
警告領域設定部120は、ダンプトラック1の走行状態が“前進中”である場合には、図5(a)に示すように、前方領域FRを警告領域として設定する。本実施形態において、前方領域FRは、第1検知範囲21R、第2検知範囲22R、第3検知範囲23Rおよび第8検知範囲28Rを合わせた領域である。また、警告領域設定部120は、ダンプトラック1の走行状態が“後進中”である場合には、図5(b)に示すように、後方領域RRを警告領域として設定する。本実施形態において、後方領域RRは、第4検知範囲24R、第5検知範囲25R、第6検知範囲26Rおよび第7検知範囲27Rを合わせた領域である。また、警告領域設定部120は、ダンプトラック1の走行状態が“停車中”である場合には、図5(c)に示すように、全領域ARを警告領域として設定する。本実施形態において、全領域ARは、前方領域FRと後方領域RRとを合わせた領域である。警告領域設定部120は、設定した警告領域を示す警告領域データを警告部140に送信する。
【0044】
俯瞰画像取得部130は、6台のカメラ11〜16それぞれから複数の画像データを受信する。俯瞰画像取得部130は、複数の画像データによって示される複数の画像に基づいて、ダンプトラック1の周囲の俯瞰画像200(図7参照)を取得する。具体的に、俯瞰画像取得部130は、複数の画像データそれぞれを座標変換することによって、複数の画像を所定の投影面上に投影させた俯瞰画像200を示す俯瞰画像データを生成する。俯瞰画像取得部130は、生成した俯瞰画像データを警告部140に送信する。
【0045】
警告部140は、8台のレーダ装置21〜28のうち少なくとも1つのレーダ装置によって検知された障害物の相対位置が警告領域内に位置することを運転者に警告する。図2に示すように、警告部140は、判定部141と、表示制御部142と、を有する。
【0046】
判定部141は、警告領域設定部120から警告領域データを受信し、俯瞰画像取得部130から俯瞰画像データを受信し、8台のレーダ装置21〜28から相対位置データを受信する。判定部141は、8台のレーダ装置21〜28からの相対位置データの受信の有無に基づいて、8台のレーダ装置21〜28のうち少なくとも1つのレーダ装置が障害物を検知したか否かを判定する。
【0047】
また、判定部141は、少なくとも1つのレーダ装置によって障害物が検知されたと判定した場合、俯瞰画像200上において障害物の相対位置が警告領域内に位置するか否かを判定する。判定部141は、障害物の相対位置が警告領域内に位置すると判定した場合、その旨を表示制御部142に通知する。
【0048】
表示制御部142は、6台のカメラ11〜16それぞれから複数の画像データを受信し、俯瞰画像取得部130から俯瞰画像データを受信し、8台のレーダ装置21〜28から相対位置データを受信する。
【0049】
表示制御部142は、判定部141から通知を受けない場合(すなわち、通常時)には、6台のカメラ11〜16のうち所定カメラの画像(「所定カメラ画像210」という。図7(a)(c)参照)と俯瞰画像200とを並べてモニタ50に表示させる。所定カメラは、ダンプトラック1の走行状態に応じて選択されることが好ましい。例えば、前進中には第2撮影範囲12Rを撮影する第2カメラ12であることが好ましく、後進中には第6撮影範囲16Rを撮影する第6カメラ16であることが好ましい。
【0050】
一方、表示制御部142は、障害物の相対位置が警告領域内に位置すると判定部141によって判定された場合には、6台のカメラ11〜16のうち検知された障害物を撮影しているカメラの画像(「障害物撮影カメラ画像220」という)を俯瞰画像200と並べてモニタ50に表示させる。
【0051】
また、表示制御部142は、モニタ50に表示される俯瞰画像200において、検知された障害物に識別用マークM(図7参照)を重ねて表示させる。識別用マークMは、俯瞰画像200上において障害物を視覚的に目立たせるための印であり、丸印、四角印、三角印などを用いることができる。
【0052】
また、表示制御部142は、モニタ50に表示される俯瞰画像200において、検知された障害物の周囲を取り囲む識別用フレームN(図7参照)を表示させる。識別用フレームNは、俯瞰画像200上において障害物の位置を容易に特定するための枠であり、枠の大きさや形などは適宜設定可能である。本実施形態では、後述するように、障害物撮影カメラの撮影領域(第1乃至第6撮影範囲11R〜12Rのいずれか1つ)の外縁が識別用フレームNとして設定されている。
【0053】
[周辺監視装置10の動作]
図6は、周辺監視装置10の動作を説明するためのフロー図である。図7は、モニタ50における表示例を示す模式図である。以下の説明では、運転者がダンプトラック1を前進させているものとする。
【0054】
ステップS10において、走行状態判断部110は、進行方向と車速を有することの組み合わせに基づいて、ダンプトラック1の走行状態を判断する。ここでは、ダンプトラック1の走行状態は、“前進中”と判断される。
【0055】
ステップS20において、警告領域設定部120は、ダンプトラック1の走行状態に応じて、障害物の存在を運転者に警告する必要のある警告領域を設定する。ステップS20では、走行状態が“前進中”であるので、前方領域FRが警告領域として設定される。
【0056】
ステップS30において、俯瞰画像取得部130は、6台のカメラ11〜16によって取得される複数の画像に基づいて、ダンプトラック1の周囲の俯瞰画像200を取得する。
【0057】
ステップS40において、表示制御部142は、俯瞰画像200と所定カメラ画像210とを並べてモニタ50に表示させる。図7(a)は、ステップS40における表示例を示す模式図である。図7(a)に示すように、モニタ50には、俯瞰画像200と所定カメラ画像210とが横に並んで表示されている。図7(a)に示される所定カメラ画像210は、第2撮影範囲12Rを撮影する第2カメラ12のリアルタイム画像である。
【0058】
ステップS50において、判定部141は、8台のレーダ装置21〜28のうち少なくとも1つのレーダ装置が障害物を検知したか否かを判定する。8台のレーダ装置21〜28のいずれかが障害物を検知した場合、処理はステップS60に進む。8台のレーダ装置21〜28のいずれもが障害物を検知しない場合、処理は一旦終了して新たな処理に移行する。
【0059】
ステップS60において、判定部141は、俯瞰画像200上において障害物の相対位置が警告領域(ここでは、前方領域FR)内に位置するか否かを判定する。俯瞰画像200上において障害物の相対位置が警告領域内に位置する場合には、処理はステップS60に進む。俯瞰画像200上において障害物の相対位置が警告領域内に位置しない場合、処理は終了して次回処理に移行する。
【0060】
ステップS70において、表示制御部142は、障害物撮影カメラ画像220を俯瞰画像200と並べてモニタ50に表示させる。また、表示制御部142は、モニタ50に表示される俯瞰画像200において、障害物に識別用マークMを重ねて表示するとともに、障害物の周囲を取り囲む識別用フレームNを表示する。図7(b)は、ステップS70における表示例を示す模式図である。図7(b)に示すように、モニタ50には、障害物撮影カメラ画像220が俯瞰画像200と並んで表示されている。図7(b)に示される障害物撮影カメラ画像220は、第3撮影範囲13Rを撮影する第3カメラ13のリアルタイム画像である。
【0061】
その後、ステップS10〜S70が繰り返し実行されるが、ステップS50において障害物が検知されない場合、或いは、ステップS60において障害物の相対位置が警告領域内から外れた場合、処理は一旦終了して新たな処理に移行する。図7(c)は、次回処理のステップS40における表示例を示す模式図である。障害物がダンプトラック1の後方に移動して警告領域から外れたことに応じて、図7(c)では、所定カメラ画像210が表示される状態に戻っている。
【0062】
[作用及び効果]
(1)周辺監視装置10は、警告領域設定部120と警告部140とを備える。警告領域設定部120は、ダンプトラック1の走行状態に応じて、障害物の存在を運転者に警告する必要のある警告領域を設定する。警告部140は、8台のレーダ装置21〜28のうち少なくとも1つのレーダ装置によって検知された障害物の相対位置が警告領域内に位置することを運転者に警告する。
【0063】
このように、ダンプトラック1の走行状態に応じて警告領域が設定されるので、走行状態に鑑みて障害物の存在を運転者に警告する必要性が低い場合に警告がなされることを抑制できる。
【0064】
(2)ダンプトラック1の走行状態は、進行方向と車速を有することの組み合わせによって規定される。
【0065】
そのため、ダンプトラック1の様々な走行状態に対応しつつ簡便に走行状態を判断することができる。
【0066】
(3)警告部140は、表示制御部142を有する。表示制御部142は、障害物の相対位置が警告領域内に位置すると判定部141によって判定された場合には、障害物撮影カメラ画像220をモニタ50に表示させる。
【0067】
このように、障害物の存在を運転者に対して視覚的に警告することができるので、障害物の存在を運転者に容易に把握させることができる。
【0068】
(4)表示制御部142は、俯瞰画像200を障害物撮影カメラ画像220と並べてモニタ50に表示させる。
【0069】
従って、俯瞰画像200において障害物の位置を運転者に視覚的に確認させることができるので、障害物の存在を運転者により容易に把握させることができる。
【0070】
(5)表示制御部142は、モニタ50に表示される俯瞰画像200において、障害物に識別用マークMを重ねて表示する。また、表示制御部142は、モニタ50に表示される俯瞰画像200において、障害物の周囲を取り囲む識別用フレームNを表示する。
【0071】
従って、障害物をより目立たせることができるので、障害物の存在をより容易に運転者に把握させることができる。
【0072】
(その他の実施形態)
以上、本発明の一実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、発明の要旨を逸脱しない範囲で種々の変更が可能である。
【0073】
(A)上記実施形態において、警告領域は、図5に示すように、前方領域FRと後方領域RRとに分けられることとしたが、これに限られるものではない。警告領域は、3以上の領域に分けられていてもよい。また、図8に示すように、前方領域FRと後方領域RRとの境界は、任意の位置に設定することができる。さらに、図9に示すように、前方領域FRと後方領域RRとは、互いに一部が重なっていてもよい。
【0074】
(B)上記実施形態において、警告部140は、障害物撮影カメラ画像220をモニタ50に表示させることによって、障害物の相対位置が警告領域内に位置することを運転者に警告することとしたが、これに限られるものではない。警告部140は、モニタ50における画像の表示に代えてスピーカから警告音を鳴らすことによって運転者に警告してもよい。また、警告部140は、モニタ50における画像の表示に代えて発光器を光らせることによって運転者に警告してもよい。
【0075】
(C)上記実施形態において、表示制御部142は、俯瞰画像200を障害物撮影カメラ画像220と並べてモニタ50に表示させることとしたが、これに限られるものではない。表示制御部142は、障害物撮影カメラ画像220のみをモニタ50に表示させてもよい。
【0076】
(D)上記実施形態において、表示制御部142は、識別用マークMおよび識別用フレームNを俯瞰画像200に表示することとしたが、これに限られるものではない。表示制御部142は、識別用マークMおよび識別用フレームNを俯瞰画像200に表示しなくてもよい。
【0077】
(E)上記実施形態において、表示制御部142は、障害物撮影カメラの撮影領域の外縁を識別用フレームNとして設定することとしたが、これに限られるものではない。識別用フレームNは、識別用マークMよりも大きければよく、その大きさや形に制限はない。
【0078】
(F)上記実施形態において特に触れていないが、走行状態に応じて8台のレーダ装置21〜28のうちいくつかのレーダ装置の電源をOFFすることによって、警告領域を設定することができる。この場合には、電源をONされているレーダ装置の検知範囲が警告領域と一致することとなる。なお、電源をOFFされたレーダ装置からは相対位置データ自体が出力されない。そのため、警告部140が相対位置データを取得することは、すなわち、障害物が警告領域内に位置することを意味するので、警告部140は判定部141を有していなくてもよい。
【0079】
(G)上記実施形態において、ダンプトラック1は、ベース7を備えることとしたが備えていなくてもよい。
【符号の説明】
【0080】
1…ダンプトラック、2…フレーム、2A…ロアデッキ、2B…アッパデッキ、2C…可動式ラダー、2D…斜めラダー、3…キャブ、4…ベッセル、5…前輪、6…後輪、10…周辺監視装置、11〜16…6台のカメラ、21〜28…8台のレーダ装置、30…シフトレバー、40…車速センサ、50…モニタ、100…コントローラ、110…走行状態判断部、120…警告領域設定部、130…俯瞰画像取得部、140…警告部、141…判定部、142…表示制御部、200…俯瞰画像、210…所定カメラ画像、220…障害物撮影カメラ画像、FR…前方領域、RR…後方領域、AR…全領域、M…識別用マーク、N…識別用フレーム
【特許請求の範囲】
【請求項1】
作業車両に装着され、作業車両の周囲の障害物を検知することによって、前記障害物の作業車両に対する相対位置をそれぞれ取得する複数の障害物検知センサと、
作業車両の走行状態に応じて、前記障害物の存在を運転者に対して警告する必要のある警告領域を設定する警告領域設定部と、
前記相対位置が前記警告領域内に位置することを運転者に警告する警告部と、
を備えた作業車両の周辺監視装置。
【請求項2】
前記走行状態は、進行方向と車速の組み合わせによって規定される、
請求項1に記載の作業車両の周辺監視装置。
【請求項3】
作業車両に装着され、作業車両の周囲の画像をそれぞれ取得する複数のカメラと、
前記複数のカメラによって取得される複数の画像に基づいて、作業車両の周囲の俯瞰画像を取得する俯瞰画像取得部と、
を備え、
前記警告部は、前記俯瞰画像上において前記相対位置が前記警告領域内に位置するか否かを判定する判定部を有する、
請求項1又は2に記載の作業車両の周辺監視装置。
【請求項4】
画像を表示可能なモニタ
を備え、
前記警告部は、前記俯瞰画像上において前記相対位置が前記警告領域内に位置すると判定された場合に、前記複数のカメラのうち前記障害物を撮影しているカメラのカメラ画像を前記モニタに表示させる表示制御部を有する、
請求項3に記載の作業車両の周辺監視装置。
【請求項5】
前記表示制御部は、前記俯瞰画像を前記カメラ画像と並べて前記モニタに表示させる、
請求項4に記載の作業車両の周辺監視装置。
【請求項6】
前記表示制御部は、前記モニタに表示される前記俯瞰画像において前記障害物に識別用マークを重ねて表示させる、
請求項5に記載の作業車両の周辺監視装置。
【請求項7】
前記表示制御部は、前記モニタに表示される前記俯瞰画像において前記障害物の周囲を取り囲む識別用フレームを表示させる、
請求項5又は6に記載の作業車両の周辺監視装置。
【請求項1】
作業車両に装着され、作業車両の周囲の障害物を検知することによって、前記障害物の作業車両に対する相対位置をそれぞれ取得する複数の障害物検知センサと、
作業車両の走行状態に応じて、前記障害物の存在を運転者に対して警告する必要のある警告領域を設定する警告領域設定部と、
前記相対位置が前記警告領域内に位置することを運転者に警告する警告部と、
を備えた作業車両の周辺監視装置。
【請求項2】
前記走行状態は、進行方向と車速の組み合わせによって規定される、
請求項1に記載の作業車両の周辺監視装置。
【請求項3】
作業車両に装着され、作業車両の周囲の画像をそれぞれ取得する複数のカメラと、
前記複数のカメラによって取得される複数の画像に基づいて、作業車両の周囲の俯瞰画像を取得する俯瞰画像取得部と、
を備え、
前記警告部は、前記俯瞰画像上において前記相対位置が前記警告領域内に位置するか否かを判定する判定部を有する、
請求項1又は2に記載の作業車両の周辺監視装置。
【請求項4】
画像を表示可能なモニタ
を備え、
前記警告部は、前記俯瞰画像上において前記相対位置が前記警告領域内に位置すると判定された場合に、前記複数のカメラのうち前記障害物を撮影しているカメラのカメラ画像を前記モニタに表示させる表示制御部を有する、
請求項3に記載の作業車両の周辺監視装置。
【請求項5】
前記表示制御部は、前記俯瞰画像を前記カメラ画像と並べて前記モニタに表示させる、
請求項4に記載の作業車両の周辺監視装置。
【請求項6】
前記表示制御部は、前記モニタに表示される前記俯瞰画像において前記障害物に識別用マークを重ねて表示させる、
請求項5に記載の作業車両の周辺監視装置。
【請求項7】
前記表示制御部は、前記モニタに表示される前記俯瞰画像において前記障害物の周囲を取り囲む識別用フレームを表示させる、
請求項5又は6に記載の作業車両の周辺監視装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−256113(P2012−256113A)
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2011−127477(P2011−127477)
【出願日】平成23年6月7日(2011.6.7)
【出願人】(000001236)株式会社小松製作所 (1,686)
【Fターム(参考)】
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願日】平成23年6月7日(2011.6.7)
【出願人】(000001236)株式会社小松製作所 (1,686)
【Fターム(参考)】
[ Back to top ]