
作業車両
【課題】走行部2の駆動構造を廉価に構成できるものでありながら、左右の走行部2の旋回操作性を向上できるようにした作業車両を提供しようとするものである。
【解決手段】左右走行部2を装設した走行機体1と、走行機体1に搭載する原動機3と、原動機3から左右走行部2にそれぞれ伝達する動力を継続または切断する左右操向クラッチ27と、左右走行部2をそれぞれ制動する左右ブレーキ28を備える走行作業機において、左操向クラッチ27と左ブレーキ28、または右操向クラッチ27と右ブレーキ28を入り切り操作する単一の旋回操作モータ41を設け、操向操作具15の操作量または操作方向に基づき旋回操作モータ41を正転または逆転させ、左方向または右方向に旋回移動可能に構成したものである。
【解決手段】左右走行部2を装設した走行機体1と、走行機体1に搭載する原動機3と、原動機3から左右走行部2にそれぞれ伝達する動力を継続または切断する左右操向クラッチ27と、左右走行部2をそれぞれ制動する左右ブレーキ28を備える走行作業機において、左操向クラッチ27と左ブレーキ28、または右操向クラッチ27と右ブレーキ28を入り切り操作する単一の旋回操作モータ41を設け、操向操作具15の操作量または操作方向に基づき旋回操作モータ41を正転または逆転させ、左方向または右方向に旋回移動可能に構成したものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、左右の走行部の操向操作を操向操作具(操向レバー)にて実行する除雪機や農作業機(コンバイン)などの作業車両に関するものである。
【背景技術】
【0002】
従来、特許文献1では、エンジンの動力を、油圧式駆動手段を介して左右の走行クローラに伝達している。また、左右の走行クローラに前記油圧式駆動手段の出力をそれぞれ伝達する左右の遊星歯車機構(差動機構)と、操向レバーの左右旋回操作によって左右の遊星歯車機構をそれぞれ出力制御する左右の旋回用電動モータを備え、左右の旋回用電動モータの制御によって左右の走行クローラの駆動速度をそれぞれ調節し、左右方向に旋回可能に構成している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−132163号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1は、左右一対の遊星歯車機構と、油圧式駆動手段として油圧ポンプ及び油圧モータ等を備え、エンジンの動力によって左右の走行クローラを駆動するものであり、左右の走行クローラにエンジンの動力を伝達するための構成部品数が多いから、走行部の駆動構造が複雑になり、製造コストが高くなる等の問題がある。また、左右の走行クローラにエンジンの動力を伝達する左右のサイドクラッチ機構と、左右のサイドクラッチ機構を断続操作する左右のサイドクラッチレバーを設けて、左右の走行クローラに対する駆動力を断続制御し、左右方向に旋回する低コスト構造の技術も公知であるが、旋回内側のサイドクラッチを切るオペレータの操作によって、旋回内側の走行クローラが制動されない。即ち、旋回内側の走行クローラを制動するには、オペレータのブレーキ操作が必要であるから、旋回操作性を向上できない等の問題がある。
【0005】
本発明は、走行部の駆動構造が廉価で、左右の走行部の旋回操作性を向上するようにした作業車両を提供することを目的とするものである。
【課題を解決するための手段】
【0006】
前記目的を達成するため、請求項1に記載の発明の作業車両は、左右走行部を装設した走行機体と、前記走行機体に搭載する原動機と、前記原動機から左右走行部にそれぞれ伝達する動力を継続または切断する左右操向クラッチと、左右走行部をそれぞれ制動する左右ブレーキを備える走行作業機において、前記左操向クラッチと左ブレーキ、または前記右操向クラッチと右ブレーキを入り切り操作する単一の旋回操作モータを設け、操向操作具の操作に基づき前記旋回操作モータを正転または逆転させ、左方向または右方向に旋回移動可能に構成したものである。
【0007】
請求項2に記載の発明は、請求項1に記載の作業車両において、前記操向操作具の操作量または操作方向、並びに予め設定した旋回パターンに基づき、旋回方向と旋回半径を演算して、前記旋回操作モータを制御可能に構成したものである。
【0008】
請求項3に記載の発明は、請求項1に記載の作業車両において、前記走行機体の移動速度を検出する車速センサを備え、前記車速センサの検出結果に基づき旋回半径を補正して、前記旋回操作モータを制御可能に構成したものである。
【0009】
請求項4に記載の発明は、請求項1に記載の作業車両において、作業状況を検出する作業センサを備え、前記作業センサの検出結果に基づき旋回半径を補正して、前記旋回操作モータを制御可能に構成したものである。
【発明の効果】
【0010】
請求項1に記載の発明によれば、左右走行部を装設した走行機体と、前記走行機体に搭載する原動機と、前記原動機から左右走行部にそれぞれ伝達する動力を継続または切断する左右操向クラッチと、左右走行部をそれぞれ制動する左右ブレーキを備える走行作業機において、前記左操向クラッチと左ブレーキ、または前記右操向クラッチと右ブレーキを入り切り操作する単一の旋回操作モータを設け、操向操作具の操作に基づき前記旋回操作モータを正転または逆転させ、左方向または右方向に旋回移動可能に構成したものであるから、左右一対の遊星歯車機構を設けて左右走行部を駆動する従来技術に比べ、左右の走行部に前記原動機の動力を伝達するための構成部品数がすくないから、走行部の駆動構造が簡略化され、製造コストを低減できる。また、左右操向クラッチと左右ブレーキを備える低コスト構造に構成できるものでありながら、旋回内側の操向クラッチを切るオペレータのクラッチ切り操作によって、旋回内側の走行部が制動される。即ち、特別にオペレータがブレーキ操作しなくても、旋回内側の走行部を制動でき、旋回操作性を向上できる。
【0011】
請求項2に記載の発明によれば、前記操向操作具の操作量または操作方向、並びに予め設定した旋回パターンに基づき、旋回方向と旋回半径を演算して、前記旋回操作モータを制御可能に構成したものであるから、除雪機または農作業機(コンバイン)に適応した旋回操作フィーリング(左右走行部の旋回動作)を簡単に得ることができ、除雪機または農作業機(コンバイン)などの各種作業内容に適した走行態様にて前記走行機体を旋回させることができ、各種作業での作業性を向上できる。
【0012】
請求項3に記載の発明によれば、前記走行機体の移動速度を検出する車速センサを備え、前記車速センサの検出結果に基づき旋回半径を補正して、前記旋回操作モータを制御可能に構成したものであるから、車速に適した走行態様にて前記走行機体を旋回させることができ、高速作業または低速作業のいずれでも作業性を向上できる。
【0013】
請求項4に記載の発明によれば、作業状況を検出する作業センサを備え、前記作業センサの検出結果に基づき旋回半径を補正して、前記旋回操作モータを制御可能に構成したものであるから、除雪機または農作業機(コンバイン)などの作業状況に適応した旋回操作フィーリング(左右走行部の旋回動作)を簡単に得ることができ、除雪機または農作業機(コンバイン)などの作業状況(各種作業内容)に適した走行態様にて前記走行機体を旋回させることができ、各種作業での作業性を向上できる。
【図面の簡単な説明】
【0014】
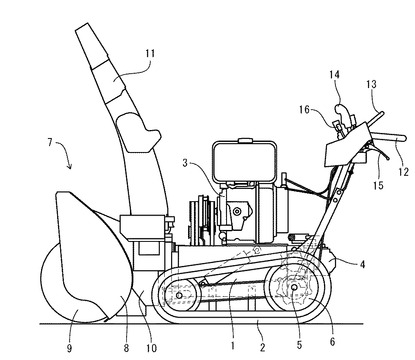
【図1】除雪機の側面図である。
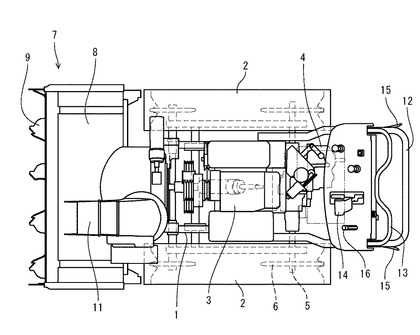
【図2】除雪機の平面図である。
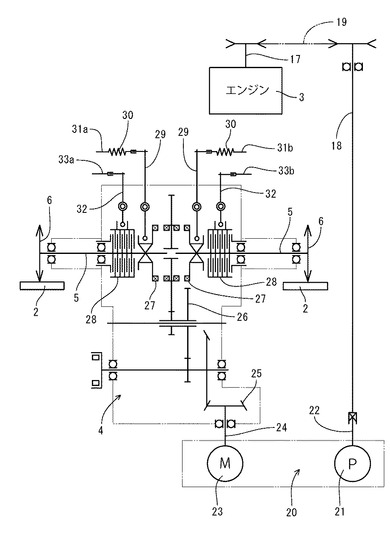
【図3】走行及び旋回のための動力伝達機構のスケルトン図である。
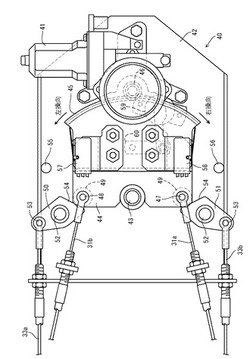
【図4】左右操向クラッチと左右ブレーキを切換える操向機構の側面説明図である。
【図5】左右操向クラッチ切り状態の側面説明図である。
【図6】左右ブレーキ入り状態の側面説明図である。
【図7】旋回制御回路図である。
【図8】旋回制御のフローチャートである。
【発明を実施するための形態】
【0015】
次に、本発明を具体化した実施形態について図面を参照しながら説明する。図1は本発明を適用した作業車両の一例であるブロワー式の歩行型除雪機の側面図、図2は同平面図、図3は動力伝達機構のスケルトン図、図4は操向機構の側面説明図である。なお、以下の説明では、走行機体1の前進方向に向かって左側を単に左側と称し、同じく前進方向に向かって右側を単に右側と称する。
【0016】
図1、図2に示す如く、左右一対の走行クローラ2(走行部)を備えた走行機体1に、エンジン3とミッションケース4とを搭載している。ミッションケース4の左右両側から突出させる左右の走行車軸5に、エンジン3からの動力を伝達する。左右の走行車軸5に駆動スプロケット6をそれぞれ設ける。左右の走行クローラ2(駆動スプロケット6)を、左右の走行車軸5にてそれぞれ回転駆動し、前進または後進または左右旋回移動するように構成している。
【0017】
また、走行機体1の前側部に除雪装置7を装設している。除雪装置7は、除雪フレーム8内に路上の雪を掻込む掻込みオーガ9と、除雪フレーム8後部に設ける吹出しブロワ10とを備える。掻込みオーガ9と、吹出しブロワ10は、エンジン3からの動力にてそれぞれ回転駆動するように構成している。吹出しブロワ10によって、除雪フレーム8内の雪を、放出シュータ11を介して外に吹き飛ばすように構成している。
【0018】
走行機体1の後端部から後方斜め上向きに操向ハンドル12を延設している。エンジン3からの動力を継断操作する走行クラッチレバー13と、車速の変更並びに前進後進の切換を操作する変速レバー14と、走行機体1の進行方向を左右方向に変更操作する操向操作具としての左右の操向レバー15と、除雪装置7に対するエンジン3からの動力伝達を継断操作する作業クラッチレバー16が、操向ハンドル12に配置されている。なお、前記放出シュータ11を水平回動させて雪放出口の左右または上下向きを変更調節するための調節ハンドル(図示省略)なども備えている。
【0019】
次に、図3を参照しながら、エンジン3から左右の走行クローラ2に動力を伝達する構成を説明する。エンジン3の出力軸17に伝動軸18の前端側をVベルト19連結している。油圧式無段変速機構20を形成する油圧ポンプ21の入力軸22に、伝動軸18の後端側を連結する。油圧式無段変速機構20を形成する油圧モータ23の出力軸24に、ミッションケース4内のベベルギヤ機構25、及び減速ギヤ機構26、及び左右の爪クラッチ形サイドクラッチ27を介して、左右の走行車軸5を連結する。また、ミッションケース4内の左右の走行車軸5上に左右の湿式多板形ブレーキ28を配設する。
【0020】
上記の構成により、エンジン3の回転出力が無段変速機構20にて無段変速される。油圧モータ23の変速出力が減速されて左右のサイドクラッチ27に伝達される。減速された変速出力が左右のサイドクラッチ27から左右の走行車軸5に伝達される。即ち、エンジン3から左右の走行クローラ2に動力が伝達され、エンジン3の回転出力にて左右の走行クローラ2が駆動され、走行機体1が前進または後進移動する。
【0021】
また、左右のサイドクラッチ27を入切作動する左右のクラッチアーム29を設け、左右のクラッチアーム29に操作バネ30を介して左右のクラッチワイヤ31a,31bの一端側をそれぞれ連結する。左右のクラッチワイヤ31a,31bを引張ることにより、左右のサイドクラッチ27がそれぞれ切り作動する一方、左右のクラッチワイヤ31a,31bを戻すことにより、図示しないバネ力にて左右のサイドクラッチ27がそれぞれ入り作動するように構成している。さらに、左右のブレーキ28を入切作動する左右のブレーキアーム32を設け、左右のブレーキアーム32に左右のブレーキワイヤ33a,33bの一端側をそれぞれ連結する。左右のブレーキワイヤ33a,33bを引張ることにより、左右のブレーキ28がそれぞれ入り作動して、左右の走行クローラ2を制動する一方、左右のブレーキワイヤ33a,33bを戻すことにより、図示しないバネ力にて左右のサイドクラッチ27がそれぞれ切り作動して、走行クローラ2の制動を解除するように構成している。
【0022】
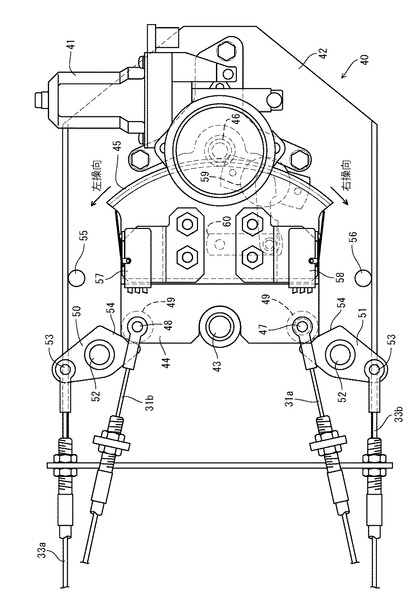
次に、左右のクラッチワイヤ31a,31b及び左右のブレーキワイヤ33a,33bを操作する操向機構40の構成について、図4〜図6を参照しながら説明する。左操向クラッチとしての左サイドクラッチ27と左ブレーキ28、または右操向クラッチとしての右サイドクラッチ27と右ブレーキ28を入り切り操作する単一の電動型旋回操作モータ41を備えている。走行機体1側に設けた旋回操作フレーム42に旋回操作モータ41をボルト締結する。なお、自動車の窓用ワイパー等を作動させるための小型で低コストの電動モータにて、旋回操作モータ41を形成する。
【0023】
また、図4に示す如く、旋回操作フレーム42に操向支点軸43を設け、操向支点軸43に操向プレート体44の一側端部を回転自在に軸支する。操向プレート体44の他側端部に扇形ギヤ45を形成する。旋回操作モータ41の出力ギヤ46に扇形ギヤ45を歯合させる。旋回操作モータ41の出力ギヤ46を正転または逆転させることによって、操向支点軸43回りに扇形ギヤ45が正転または逆転するように構成している。
【0024】
さらに、図4において、操向プレート体44に2本の支軸47,48を設ける。各支軸47,48は、操向支点軸43を挟んで対称位置に配置される。各支軸47,48に左右のクラッチワイヤ31a,31bを連結する。また、各支軸47,48にローラ49を回転自在にそれぞれ軸支する。一方、各ローラ49にそれぞれ当接させる左右のブレーキ操作体50,51を備える。操向プレート体44の固定軸52に各ブレーキ操作体50,51の中間部を回転自在にそれぞれ軸支する。各ブレーキ操作体50,51の一端側に軸体53を介してブレーキワイヤ33a,33bを連結する。各ブレーキ操作体50,51の他端側にカム面54をそれぞれ形成する。各ブレーキ操作体50,51の各カム面54に各ローラ49をそれぞれ当接させている。
【0025】
上記の構成により、図5に示す如く、旋回操作モータ41を正転させて、操向支点軸43を中心に、操向プレート体44を右操向方向(時計方向)に回動させることによって、右のクラッチワイヤ31bが引張られて、右サイドクラッチ27を切断作動する。右サイドクラッチ27の切断によって、右走行クローラ2の駆動が中断され、比較的大きな旋回半径で走行機体1が右方向に旋回移動する。
【0026】
逆に、図5の仮想線に示す如く、旋回操作モータ41を逆転させて、操向支点軸43を中心に、操向プレート体44を左操向方向(反時計方向)に回動させた場合、左のクラッチワイヤ31aが引張られて、左サイドクラッチ27を切断作動する。左サイドクラッチ27の切断によって、左走行クローラ2の駆動が中断され、比較的大きな旋回半径で走行機体1が左方向に旋回移動する。
【0027】
図6に示す如く、図5の右サイドクラッチ27切断状態から旋回操作モータ41をさらに正転させて、操向支点軸43を中心に、図5に示す実線位置の操向プレート体44を右制動方向(時計方向)にさらに回動させることによって、右サイドクラッチ27が切断された状態で、ローラ49とカム面54の当接にて、ブレーキ操作体51が回動して右ブレーキワイヤ33bを引張り、右ブレーキ28を入り作動して、右走行クローラ2を制動する。右走行クローラ2の制動によって、比較的小さな旋回半径で走行機体1が右方向に旋回移動する。
【0028】
逆に、図6の仮想線に示す如く、図5の左サイドクラッチ27切断状態から旋回操作モータ41をさらに逆転させて、操向支点軸43を中心に、図5に示す仮想線位置の操向プレート体44を左制動方向(反時計方向)にさらに回動させることによって、左サイドクラッチ27が切断された状態で、ローラ49とカム面54の当接にて、ブレーキ操作体50が回動して左ブレーキワイヤ33aを引張り、左ブレーキ28を入り作動して、左走行クローラ2を制動する。左走行クローラ2の制動によって、比較的小さな旋回半径で走行機体1が左方向に旋回移動する。
【0029】
さらに、図4に示す如く、旋回操作フレーム42に、左操向ストッパ55と右操向ストッパ56を設ける。操向プレート体44に、左旋回リミットスイッチ57と右旋回リミットスイッチ58を設ける。即ち、旋回操作モータ41にて操向プレート体44が左右操向作動したときに、最大作動位置で、左操向ストッパ55または右操向ストッパ56との当接によって、左旋回リミットスイッチ57または右旋回リミットスイッチ58がオン作動し、それ以上の旋回操作モータ41の同一方向の回転を禁止するように構成している。
【0030】
また、図4に示す如く、旋回操作フレーム42に、ポテンショメータ形の旋回角度センサ59を設ける。操向プレート体44にセンサリンク機構60を介して旋回角度センサ59を連結させる。即ち、旋回操作モータ41にて操向プレート体44が左右操向作動したときに、操向プレート体44が右操向作動方向(正転)に回転したか、または左操向作動方向(逆転)に回転したかを旋回角度センサ59にて検出する。それと同時に、操向プレート体44の操向作動量(旋回角度)を旋回角度センサ59にて検出するように構成している。
【0031】
次に、図7の旋回制御回路図を参照して、上記の構成による操向制御手段について説明する。マイクロコンピュータにて構成する旋回コントローラ65を備える。左右の操向レバー15の操作量をそれぞれ電気信号に変換するポテンショメータ形の左右の操向入力センサ66と、作業クラッチレバー16の入り操作を検出する作業センサ67と、走行クローラ2の回転速度を検出する車速センサ68と、左旋回リミットスイッチ57と、右旋回リミットスイッチ58と、旋回角度センサ59を、旋回コントローラ65に入力接続する。また、旋回コントローラ65に旋回操作モータ41を出力接続する。前記各センサ59,66,67,68及び各スイッチ57,58の入力によって旋回操作モータ41を自動的に作動させるように構成している。
【0032】
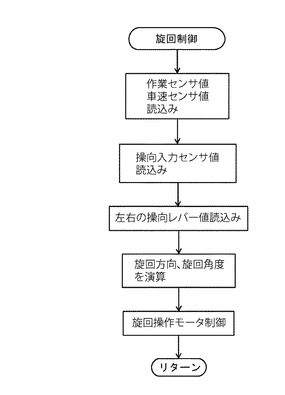
次に、図8の旋回制御フローチャートを参照して、上記の構成による操向操作について説明する。オペレータが操向ハンドル12を握りながら走行機体1に追従して移動し、除雪作業を実行するもので、作業センサ67及び車速センサ68の検出結果を旋回コントローラ65に読み込む。また、左右の操向入力センサ66の検出結果(左右の操向レバー15の握り操作量)を旋回コントローラ65に読み込む。旋回コントローラ65にて、左右旋回方向と、旋回角度を演算し、図7に示す旋回出力(2次曲線にて形成する旋回パターン)に基づき、旋回操作モータ41を正転または逆転制御する。
【0033】
即ち、旋回操作モータ41の正転制御によって、操向プレート体44が右操向方向(図4の時計方向)に回動し、右サイドクラッチ27を切断作動して、比較的大きな旋回半径で走行機体1が右方向に旋回移動する(図5参照)。右サイドクラッチ27切断状態から旋回操作モータ41がさらに正転した場合、操向プレート体44が右制動方向(図4の時計方向)にさらに回動して、右ブレーキ28の入り作動にて、右走行クローラ2を制動して、比較的小さな旋回半径で走行機体1が右方向に旋回移動する(図6参照)。
【0034】
一方、旋回操作モータ41の逆転制御によって、操向プレート体44が左操向方向(図4の反時計方向)に回動し、左サイドクラッチ27を切断作動して、比較的大きな旋回半径で走行機体1が左方向に旋回移動する(図5参照)。左サイドクラッチ27切断状態から旋回操作モータ41がさらに正転した場合、操向プレート体44が左制動方向(図4の反時計方向)にさらに回動して、左ブレーキ28の入り作動にて、左走行クローラ2を制動して、比較的小さな旋回半径で走行機体1が左方向に旋回移動する(図6参照)。
【0035】
図1、図3、図4、図7に示す如く、左右走行部としての走行クローラ2を装設した走行機体1と、走行機体1に搭載する原動機としてのエンジン3と、エンジン3から左右走行クローラ2にそれぞれ伝達する動力を継続または切断する左右操向クラッチ27と、左右走行クローラ2をそれぞれ制動する左右ブレーキ28を備える走行作業機において、左操向クラッチとしての左サイドクラッチ27と左ブレーキ28、または右サイドクラッチ27と右ブレーキ28を入り切り操作する単一の旋回操作モータ41を設け、操向操作具としての左右の操向レバー15の操作量または操作方向に基づき旋回操作モータ41を正転または逆転させ、左方向または右方向に旋回移動可能に構成したものであるから、左右一対の遊星歯車機構を設けて左右走行部を駆動する従来技術に比べ、左右の走行クローラ2にエンジン3の動力を伝達するための構成部品数がすくないから、走行クローラ2の駆動構造が簡略化され、製造コストを低減できる。また、左右サイドクラッチ27と左右ブレーキ28を備える低コスト構造に構成できるものでありながら、旋回内側のサイドクラッチ27を切るオペレータのクラッチ切り操作によって、旋回内側の走行クローラ2が制動される。即ち、特別にオペレータがブレーキ28操作しなくても、旋回内側の走行クローラ2を制動でき、旋回操作性を向上できる。
【0036】
図4、図7に示す如く、操向操作具としての左右の操向レバー15の操作量または操作方向、並びに予め設定した旋回パターン(2次曲線出力)に基づき、旋回方向と旋回半径を演算して、旋回操作モータ41を制御可能に構成したものであるから、除雪機(またはコンバインなどの農作業機)に適応した旋回操作フィーリング(左右走行部の旋回動作)を簡単に得ることができ、除雪機(またはコンバインなどの農作業機)の各種作業内容に適した走行態様にて走行機体1を旋回させることができ、各種作業での作業性を向上できる。
【0037】
図7、図8に示す如く、走行機体1の移動速度を検出する車速センサ68を備え、車速センサ68の検出結果に基づき旋回半径を補正して、旋回操作モータ41を制御可能に構成したものであるから、車速に適した走行態様にて走行機体1を旋回させることができ、高速作業または低速作業のいずれでも作業性を向上できる。
【0038】
図7、図8に示す如く、作業状況を検出する作業センサ67を備え、作業センサ67の検出結果に基づき旋回半径を補正して、旋回操作モータ41を制御可能に構成したものであるから、除雪機または農作業機(コンバイン)などの作業状況に適応した旋回操作フィーリング(左右走行部の旋回動作)を簡単に得ることができ、除雪機(またはコンバインなどの農作業機)の作業状況(各種作業内容)に適した走行態様にて走行機体1を旋回させることができ、各種作業での作業性を向上できる。
【符号の説明】
【0039】
1 走行機体
2 走行クローラ(走行部)
3 エンジン(原動機)
15 操向レバー(操向操作具)
27 サイドクラッチ(操向クラッチ)
41 旋回操作モータ
67 作業センサ
68 車速センサ
【技術分野】
【0001】
本発明は、左右の走行部の操向操作を操向操作具(操向レバー)にて実行する除雪機や農作業機(コンバイン)などの作業車両に関するものである。
【背景技術】
【0002】
従来、特許文献1では、エンジンの動力を、油圧式駆動手段を介して左右の走行クローラに伝達している。また、左右の走行クローラに前記油圧式駆動手段の出力をそれぞれ伝達する左右の遊星歯車機構(差動機構)と、操向レバーの左右旋回操作によって左右の遊星歯車機構をそれぞれ出力制御する左右の旋回用電動モータを備え、左右の旋回用電動モータの制御によって左右の走行クローラの駆動速度をそれぞれ調節し、左右方向に旋回可能に構成している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−132163号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1は、左右一対の遊星歯車機構と、油圧式駆動手段として油圧ポンプ及び油圧モータ等を備え、エンジンの動力によって左右の走行クローラを駆動するものであり、左右の走行クローラにエンジンの動力を伝達するための構成部品数が多いから、走行部の駆動構造が複雑になり、製造コストが高くなる等の問題がある。また、左右の走行クローラにエンジンの動力を伝達する左右のサイドクラッチ機構と、左右のサイドクラッチ機構を断続操作する左右のサイドクラッチレバーを設けて、左右の走行クローラに対する駆動力を断続制御し、左右方向に旋回する低コスト構造の技術も公知であるが、旋回内側のサイドクラッチを切るオペレータの操作によって、旋回内側の走行クローラが制動されない。即ち、旋回内側の走行クローラを制動するには、オペレータのブレーキ操作が必要であるから、旋回操作性を向上できない等の問題がある。
【0005】
本発明は、走行部の駆動構造が廉価で、左右の走行部の旋回操作性を向上するようにした作業車両を提供することを目的とするものである。
【課題を解決するための手段】
【0006】
前記目的を達成するため、請求項1に記載の発明の作業車両は、左右走行部を装設した走行機体と、前記走行機体に搭載する原動機と、前記原動機から左右走行部にそれぞれ伝達する動力を継続または切断する左右操向クラッチと、左右走行部をそれぞれ制動する左右ブレーキを備える走行作業機において、前記左操向クラッチと左ブレーキ、または前記右操向クラッチと右ブレーキを入り切り操作する単一の旋回操作モータを設け、操向操作具の操作に基づき前記旋回操作モータを正転または逆転させ、左方向または右方向に旋回移動可能に構成したものである。
【0007】
請求項2に記載の発明は、請求項1に記載の作業車両において、前記操向操作具の操作量または操作方向、並びに予め設定した旋回パターンに基づき、旋回方向と旋回半径を演算して、前記旋回操作モータを制御可能に構成したものである。
【0008】
請求項3に記載の発明は、請求項1に記載の作業車両において、前記走行機体の移動速度を検出する車速センサを備え、前記車速センサの検出結果に基づき旋回半径を補正して、前記旋回操作モータを制御可能に構成したものである。
【0009】
請求項4に記載の発明は、請求項1に記載の作業車両において、作業状況を検出する作業センサを備え、前記作業センサの検出結果に基づき旋回半径を補正して、前記旋回操作モータを制御可能に構成したものである。
【発明の効果】
【0010】
請求項1に記載の発明によれば、左右走行部を装設した走行機体と、前記走行機体に搭載する原動機と、前記原動機から左右走行部にそれぞれ伝達する動力を継続または切断する左右操向クラッチと、左右走行部をそれぞれ制動する左右ブレーキを備える走行作業機において、前記左操向クラッチと左ブレーキ、または前記右操向クラッチと右ブレーキを入り切り操作する単一の旋回操作モータを設け、操向操作具の操作に基づき前記旋回操作モータを正転または逆転させ、左方向または右方向に旋回移動可能に構成したものであるから、左右一対の遊星歯車機構を設けて左右走行部を駆動する従来技術に比べ、左右の走行部に前記原動機の動力を伝達するための構成部品数がすくないから、走行部の駆動構造が簡略化され、製造コストを低減できる。また、左右操向クラッチと左右ブレーキを備える低コスト構造に構成できるものでありながら、旋回内側の操向クラッチを切るオペレータのクラッチ切り操作によって、旋回内側の走行部が制動される。即ち、特別にオペレータがブレーキ操作しなくても、旋回内側の走行部を制動でき、旋回操作性を向上できる。
【0011】
請求項2に記載の発明によれば、前記操向操作具の操作量または操作方向、並びに予め設定した旋回パターンに基づき、旋回方向と旋回半径を演算して、前記旋回操作モータを制御可能に構成したものであるから、除雪機または農作業機(コンバイン)に適応した旋回操作フィーリング(左右走行部の旋回動作)を簡単に得ることができ、除雪機または農作業機(コンバイン)などの各種作業内容に適した走行態様にて前記走行機体を旋回させることができ、各種作業での作業性を向上できる。
【0012】
請求項3に記載の発明によれば、前記走行機体の移動速度を検出する車速センサを備え、前記車速センサの検出結果に基づき旋回半径を補正して、前記旋回操作モータを制御可能に構成したものであるから、車速に適した走行態様にて前記走行機体を旋回させることができ、高速作業または低速作業のいずれでも作業性を向上できる。
【0013】
請求項4に記載の発明によれば、作業状況を検出する作業センサを備え、前記作業センサの検出結果に基づき旋回半径を補正して、前記旋回操作モータを制御可能に構成したものであるから、除雪機または農作業機(コンバイン)などの作業状況に適応した旋回操作フィーリング(左右走行部の旋回動作)を簡単に得ることができ、除雪機または農作業機(コンバイン)などの作業状況(各種作業内容)に適した走行態様にて前記走行機体を旋回させることができ、各種作業での作業性を向上できる。
【図面の簡単な説明】
【0014】
【図1】除雪機の側面図である。
【図2】除雪機の平面図である。
【図3】走行及び旋回のための動力伝達機構のスケルトン図である。
【図4】左右操向クラッチと左右ブレーキを切換える操向機構の側面説明図である。
【図5】左右操向クラッチ切り状態の側面説明図である。
【図6】左右ブレーキ入り状態の側面説明図である。
【図7】旋回制御回路図である。
【図8】旋回制御のフローチャートである。
【発明を実施するための形態】
【0015】
次に、本発明を具体化した実施形態について図面を参照しながら説明する。図1は本発明を適用した作業車両の一例であるブロワー式の歩行型除雪機の側面図、図2は同平面図、図3は動力伝達機構のスケルトン図、図4は操向機構の側面説明図である。なお、以下の説明では、走行機体1の前進方向に向かって左側を単に左側と称し、同じく前進方向に向かって右側を単に右側と称する。
【0016】
図1、図2に示す如く、左右一対の走行クローラ2(走行部)を備えた走行機体1に、エンジン3とミッションケース4とを搭載している。ミッションケース4の左右両側から突出させる左右の走行車軸5に、エンジン3からの動力を伝達する。左右の走行車軸5に駆動スプロケット6をそれぞれ設ける。左右の走行クローラ2(駆動スプロケット6)を、左右の走行車軸5にてそれぞれ回転駆動し、前進または後進または左右旋回移動するように構成している。
【0017】
また、走行機体1の前側部に除雪装置7を装設している。除雪装置7は、除雪フレーム8内に路上の雪を掻込む掻込みオーガ9と、除雪フレーム8後部に設ける吹出しブロワ10とを備える。掻込みオーガ9と、吹出しブロワ10は、エンジン3からの動力にてそれぞれ回転駆動するように構成している。吹出しブロワ10によって、除雪フレーム8内の雪を、放出シュータ11を介して外に吹き飛ばすように構成している。
【0018】
走行機体1の後端部から後方斜め上向きに操向ハンドル12を延設している。エンジン3からの動力を継断操作する走行クラッチレバー13と、車速の変更並びに前進後進の切換を操作する変速レバー14と、走行機体1の進行方向を左右方向に変更操作する操向操作具としての左右の操向レバー15と、除雪装置7に対するエンジン3からの動力伝達を継断操作する作業クラッチレバー16が、操向ハンドル12に配置されている。なお、前記放出シュータ11を水平回動させて雪放出口の左右または上下向きを変更調節するための調節ハンドル(図示省略)なども備えている。
【0019】
次に、図3を参照しながら、エンジン3から左右の走行クローラ2に動力を伝達する構成を説明する。エンジン3の出力軸17に伝動軸18の前端側をVベルト19連結している。油圧式無段変速機構20を形成する油圧ポンプ21の入力軸22に、伝動軸18の後端側を連結する。油圧式無段変速機構20を形成する油圧モータ23の出力軸24に、ミッションケース4内のベベルギヤ機構25、及び減速ギヤ機構26、及び左右の爪クラッチ形サイドクラッチ27を介して、左右の走行車軸5を連結する。また、ミッションケース4内の左右の走行車軸5上に左右の湿式多板形ブレーキ28を配設する。
【0020】
上記の構成により、エンジン3の回転出力が無段変速機構20にて無段変速される。油圧モータ23の変速出力が減速されて左右のサイドクラッチ27に伝達される。減速された変速出力が左右のサイドクラッチ27から左右の走行車軸5に伝達される。即ち、エンジン3から左右の走行クローラ2に動力が伝達され、エンジン3の回転出力にて左右の走行クローラ2が駆動され、走行機体1が前進または後進移動する。
【0021】
また、左右のサイドクラッチ27を入切作動する左右のクラッチアーム29を設け、左右のクラッチアーム29に操作バネ30を介して左右のクラッチワイヤ31a,31bの一端側をそれぞれ連結する。左右のクラッチワイヤ31a,31bを引張ることにより、左右のサイドクラッチ27がそれぞれ切り作動する一方、左右のクラッチワイヤ31a,31bを戻すことにより、図示しないバネ力にて左右のサイドクラッチ27がそれぞれ入り作動するように構成している。さらに、左右のブレーキ28を入切作動する左右のブレーキアーム32を設け、左右のブレーキアーム32に左右のブレーキワイヤ33a,33bの一端側をそれぞれ連結する。左右のブレーキワイヤ33a,33bを引張ることにより、左右のブレーキ28がそれぞれ入り作動して、左右の走行クローラ2を制動する一方、左右のブレーキワイヤ33a,33bを戻すことにより、図示しないバネ力にて左右のサイドクラッチ27がそれぞれ切り作動して、走行クローラ2の制動を解除するように構成している。
【0022】
次に、左右のクラッチワイヤ31a,31b及び左右のブレーキワイヤ33a,33bを操作する操向機構40の構成について、図4〜図6を参照しながら説明する。左操向クラッチとしての左サイドクラッチ27と左ブレーキ28、または右操向クラッチとしての右サイドクラッチ27と右ブレーキ28を入り切り操作する単一の電動型旋回操作モータ41を備えている。走行機体1側に設けた旋回操作フレーム42に旋回操作モータ41をボルト締結する。なお、自動車の窓用ワイパー等を作動させるための小型で低コストの電動モータにて、旋回操作モータ41を形成する。
【0023】
また、図4に示す如く、旋回操作フレーム42に操向支点軸43を設け、操向支点軸43に操向プレート体44の一側端部を回転自在に軸支する。操向プレート体44の他側端部に扇形ギヤ45を形成する。旋回操作モータ41の出力ギヤ46に扇形ギヤ45を歯合させる。旋回操作モータ41の出力ギヤ46を正転または逆転させることによって、操向支点軸43回りに扇形ギヤ45が正転または逆転するように構成している。
【0024】
さらに、図4において、操向プレート体44に2本の支軸47,48を設ける。各支軸47,48は、操向支点軸43を挟んで対称位置に配置される。各支軸47,48に左右のクラッチワイヤ31a,31bを連結する。また、各支軸47,48にローラ49を回転自在にそれぞれ軸支する。一方、各ローラ49にそれぞれ当接させる左右のブレーキ操作体50,51を備える。操向プレート体44の固定軸52に各ブレーキ操作体50,51の中間部を回転自在にそれぞれ軸支する。各ブレーキ操作体50,51の一端側に軸体53を介してブレーキワイヤ33a,33bを連結する。各ブレーキ操作体50,51の他端側にカム面54をそれぞれ形成する。各ブレーキ操作体50,51の各カム面54に各ローラ49をそれぞれ当接させている。
【0025】
上記の構成により、図5に示す如く、旋回操作モータ41を正転させて、操向支点軸43を中心に、操向プレート体44を右操向方向(時計方向)に回動させることによって、右のクラッチワイヤ31bが引張られて、右サイドクラッチ27を切断作動する。右サイドクラッチ27の切断によって、右走行クローラ2の駆動が中断され、比較的大きな旋回半径で走行機体1が右方向に旋回移動する。
【0026】
逆に、図5の仮想線に示す如く、旋回操作モータ41を逆転させて、操向支点軸43を中心に、操向プレート体44を左操向方向(反時計方向)に回動させた場合、左のクラッチワイヤ31aが引張られて、左サイドクラッチ27を切断作動する。左サイドクラッチ27の切断によって、左走行クローラ2の駆動が中断され、比較的大きな旋回半径で走行機体1が左方向に旋回移動する。
【0027】
図6に示す如く、図5の右サイドクラッチ27切断状態から旋回操作モータ41をさらに正転させて、操向支点軸43を中心に、図5に示す実線位置の操向プレート体44を右制動方向(時計方向)にさらに回動させることによって、右サイドクラッチ27が切断された状態で、ローラ49とカム面54の当接にて、ブレーキ操作体51が回動して右ブレーキワイヤ33bを引張り、右ブレーキ28を入り作動して、右走行クローラ2を制動する。右走行クローラ2の制動によって、比較的小さな旋回半径で走行機体1が右方向に旋回移動する。
【0028】
逆に、図6の仮想線に示す如く、図5の左サイドクラッチ27切断状態から旋回操作モータ41をさらに逆転させて、操向支点軸43を中心に、図5に示す仮想線位置の操向プレート体44を左制動方向(反時計方向)にさらに回動させることによって、左サイドクラッチ27が切断された状態で、ローラ49とカム面54の当接にて、ブレーキ操作体50が回動して左ブレーキワイヤ33aを引張り、左ブレーキ28を入り作動して、左走行クローラ2を制動する。左走行クローラ2の制動によって、比較的小さな旋回半径で走行機体1が左方向に旋回移動する。
【0029】
さらに、図4に示す如く、旋回操作フレーム42に、左操向ストッパ55と右操向ストッパ56を設ける。操向プレート体44に、左旋回リミットスイッチ57と右旋回リミットスイッチ58を設ける。即ち、旋回操作モータ41にて操向プレート体44が左右操向作動したときに、最大作動位置で、左操向ストッパ55または右操向ストッパ56との当接によって、左旋回リミットスイッチ57または右旋回リミットスイッチ58がオン作動し、それ以上の旋回操作モータ41の同一方向の回転を禁止するように構成している。
【0030】
また、図4に示す如く、旋回操作フレーム42に、ポテンショメータ形の旋回角度センサ59を設ける。操向プレート体44にセンサリンク機構60を介して旋回角度センサ59を連結させる。即ち、旋回操作モータ41にて操向プレート体44が左右操向作動したときに、操向プレート体44が右操向作動方向(正転)に回転したか、または左操向作動方向(逆転)に回転したかを旋回角度センサ59にて検出する。それと同時に、操向プレート体44の操向作動量(旋回角度)を旋回角度センサ59にて検出するように構成している。
【0031】
次に、図7の旋回制御回路図を参照して、上記の構成による操向制御手段について説明する。マイクロコンピュータにて構成する旋回コントローラ65を備える。左右の操向レバー15の操作量をそれぞれ電気信号に変換するポテンショメータ形の左右の操向入力センサ66と、作業クラッチレバー16の入り操作を検出する作業センサ67と、走行クローラ2の回転速度を検出する車速センサ68と、左旋回リミットスイッチ57と、右旋回リミットスイッチ58と、旋回角度センサ59を、旋回コントローラ65に入力接続する。また、旋回コントローラ65に旋回操作モータ41を出力接続する。前記各センサ59,66,67,68及び各スイッチ57,58の入力によって旋回操作モータ41を自動的に作動させるように構成している。
【0032】
次に、図8の旋回制御フローチャートを参照して、上記の構成による操向操作について説明する。オペレータが操向ハンドル12を握りながら走行機体1に追従して移動し、除雪作業を実行するもので、作業センサ67及び車速センサ68の検出結果を旋回コントローラ65に読み込む。また、左右の操向入力センサ66の検出結果(左右の操向レバー15の握り操作量)を旋回コントローラ65に読み込む。旋回コントローラ65にて、左右旋回方向と、旋回角度を演算し、図7に示す旋回出力(2次曲線にて形成する旋回パターン)に基づき、旋回操作モータ41を正転または逆転制御する。
【0033】
即ち、旋回操作モータ41の正転制御によって、操向プレート体44が右操向方向(図4の時計方向)に回動し、右サイドクラッチ27を切断作動して、比較的大きな旋回半径で走行機体1が右方向に旋回移動する(図5参照)。右サイドクラッチ27切断状態から旋回操作モータ41がさらに正転した場合、操向プレート体44が右制動方向(図4の時計方向)にさらに回動して、右ブレーキ28の入り作動にて、右走行クローラ2を制動して、比較的小さな旋回半径で走行機体1が右方向に旋回移動する(図6参照)。
【0034】
一方、旋回操作モータ41の逆転制御によって、操向プレート体44が左操向方向(図4の反時計方向)に回動し、左サイドクラッチ27を切断作動して、比較的大きな旋回半径で走行機体1が左方向に旋回移動する(図5参照)。左サイドクラッチ27切断状態から旋回操作モータ41がさらに正転した場合、操向プレート体44が左制動方向(図4の反時計方向)にさらに回動して、左ブレーキ28の入り作動にて、左走行クローラ2を制動して、比較的小さな旋回半径で走行機体1が左方向に旋回移動する(図6参照)。
【0035】
図1、図3、図4、図7に示す如く、左右走行部としての走行クローラ2を装設した走行機体1と、走行機体1に搭載する原動機としてのエンジン3と、エンジン3から左右走行クローラ2にそれぞれ伝達する動力を継続または切断する左右操向クラッチ27と、左右走行クローラ2をそれぞれ制動する左右ブレーキ28を備える走行作業機において、左操向クラッチとしての左サイドクラッチ27と左ブレーキ28、または右サイドクラッチ27と右ブレーキ28を入り切り操作する単一の旋回操作モータ41を設け、操向操作具としての左右の操向レバー15の操作量または操作方向に基づき旋回操作モータ41を正転または逆転させ、左方向または右方向に旋回移動可能に構成したものであるから、左右一対の遊星歯車機構を設けて左右走行部を駆動する従来技術に比べ、左右の走行クローラ2にエンジン3の動力を伝達するための構成部品数がすくないから、走行クローラ2の駆動構造が簡略化され、製造コストを低減できる。また、左右サイドクラッチ27と左右ブレーキ28を備える低コスト構造に構成できるものでありながら、旋回内側のサイドクラッチ27を切るオペレータのクラッチ切り操作によって、旋回内側の走行クローラ2が制動される。即ち、特別にオペレータがブレーキ28操作しなくても、旋回内側の走行クローラ2を制動でき、旋回操作性を向上できる。
【0036】
図4、図7に示す如く、操向操作具としての左右の操向レバー15の操作量または操作方向、並びに予め設定した旋回パターン(2次曲線出力)に基づき、旋回方向と旋回半径を演算して、旋回操作モータ41を制御可能に構成したものであるから、除雪機(またはコンバインなどの農作業機)に適応した旋回操作フィーリング(左右走行部の旋回動作)を簡単に得ることができ、除雪機(またはコンバインなどの農作業機)の各種作業内容に適した走行態様にて走行機体1を旋回させることができ、各種作業での作業性を向上できる。
【0037】
図7、図8に示す如く、走行機体1の移動速度を検出する車速センサ68を備え、車速センサ68の検出結果に基づき旋回半径を補正して、旋回操作モータ41を制御可能に構成したものであるから、車速に適した走行態様にて走行機体1を旋回させることができ、高速作業または低速作業のいずれでも作業性を向上できる。
【0038】
図7、図8に示す如く、作業状況を検出する作業センサ67を備え、作業センサ67の検出結果に基づき旋回半径を補正して、旋回操作モータ41を制御可能に構成したものであるから、除雪機または農作業機(コンバイン)などの作業状況に適応した旋回操作フィーリング(左右走行部の旋回動作)を簡単に得ることができ、除雪機(またはコンバインなどの農作業機)の作業状況(各種作業内容)に適した走行態様にて走行機体1を旋回させることができ、各種作業での作業性を向上できる。
【符号の説明】
【0039】
1 走行機体
2 走行クローラ(走行部)
3 エンジン(原動機)
15 操向レバー(操向操作具)
27 サイドクラッチ(操向クラッチ)
41 旋回操作モータ
67 作業センサ
68 車速センサ
【特許請求の範囲】
【請求項1】
左右走行部を装設した走行機体と、前記走行機体に搭載する原動機と、前記原動機から左右走行部にそれぞれ伝達する動力を継続または切断する左右操向クラッチと、左右走行部をそれぞれ制動する左右ブレーキを備える走行作業機において、
前記左操向クラッチと左ブレーキ、または前記右操向クラッチと右ブレーキを入り切り操作する単一の旋回操作モータを設け、操向操作具の操作に基づき前記旋回操作モータを正転または逆転させ、左方向または右方向に旋回移動可能に構成したことを特徴とする作業車両。
【請求項2】
前記操向操作具の操作量または操作方向、並びに予め設定した旋回パターンに基づき、旋回方向と旋回半径を演算して、前記旋回操作モータを制御可能に構成したことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記走行機体の移動速度を検出する車速センサを備え、前記車速センサの検出結果に基づき旋回半径を補正して、前記旋回操作モータを制御可能に構成したことを特徴とする請求項1に記載の作業車両。
【請求項4】
作業状況を検出する作業センサを備え、前記作業センサの検出結果に基づき旋回半径を補正して、前記旋回操作モータを制御可能に構成したことを特徴とする請求項1に記載の作業車両。
【請求項1】
左右走行部を装設した走行機体と、前記走行機体に搭載する原動機と、前記原動機から左右走行部にそれぞれ伝達する動力を継続または切断する左右操向クラッチと、左右走行部をそれぞれ制動する左右ブレーキを備える走行作業機において、
前記左操向クラッチと左ブレーキ、または前記右操向クラッチと右ブレーキを入り切り操作する単一の旋回操作モータを設け、操向操作具の操作に基づき前記旋回操作モータを正転または逆転させ、左方向または右方向に旋回移動可能に構成したことを特徴とする作業車両。
【請求項2】
前記操向操作具の操作量または操作方向、並びに予め設定した旋回パターンに基づき、旋回方向と旋回半径を演算して、前記旋回操作モータを制御可能に構成したことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記走行機体の移動速度を検出する車速センサを備え、前記車速センサの検出結果に基づき旋回半径を補正して、前記旋回操作モータを制御可能に構成したことを特徴とする請求項1に記載の作業車両。
【請求項4】
作業状況を検出する作業センサを備え、前記作業センサの検出結果に基づき旋回半径を補正して、前記旋回操作モータを制御可能に構成したことを特徴とする請求項1に記載の作業車両。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】

【図7】

【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−232636(P2012−232636A)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2011−101373(P2011−101373)
【出願日】平成23年4月28日(2011.4.28)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【出願人】(391025914)八鹿鉄工株式会社 (131)
【Fターム(参考)】
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願日】平成23年4月28日(2011.4.28)
【出願人】(000006781)ヤンマー株式会社 (3,810)
【出願人】(391025914)八鹿鉄工株式会社 (131)
【Fターム(参考)】
[ Back to top ]