
作業車両
【課題】
土壌状態に合わせてエンジンの燃料噴射量を変更し、安定した土壌ではエンジンの回転数を減少させて燃費を向上させると共に、不安定な圃場ではエンジンの回転数を増大させて走行姿勢を安定させることのできる作業車両を提供する。
【解決手段】
左右の前輪6,6と左右の後輪7,7により圃場を走行する走行車体9にエンジン8を設け、走行車体9の後部に圃場に苗を植え付ける植付部5を設けた作業車両において、走行する土壌の状態を検出する土壌センサ10を設け、土壌センサ10が検出した土壌状態に合わせてエンジン8の燃料の噴射量を増減制御する構成とし、土壌センサ10の下部に、土壌センサ10の検出面11に間欠的に接触して付着物を除去する清掃部材12を設ける。
土壌状態に合わせてエンジンの燃料噴射量を変更し、安定した土壌ではエンジンの回転数を減少させて燃費を向上させると共に、不安定な圃場ではエンジンの回転数を増大させて走行姿勢を安定させることのできる作業車両を提供する。
【解決手段】
左右の前輪6,6と左右の後輪7,7により圃場を走行する走行車体9にエンジン8を設け、走行車体9の後部に圃場に苗を植え付ける植付部5を設けた作業車両において、走行する土壌の状態を検出する土壌センサ10を設け、土壌センサ10が検出した土壌状態に合わせてエンジン8の燃料の噴射量を増減制御する構成とし、土壌センサ10の下部に、土壌センサ10の検出面11に間欠的に接触して付着物を除去する清掃部材12を設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本件発明は、作業場所の土壌状態を検出し、検出した土壌状態に合わせてエンジンの燃料噴射量を変更して出力を自動調節し、土壌状態に関わらず安定した走行が可能な作業車両に関するものである。
【背景技術】
【0002】
従来、耕盤の深い圃場や、粘土質の圃場のように走行負荷の極めて大きい圃場での作業では、泥が車輪を動きを妨げる抵抗によるエンジンストールが発生しやすいため、エンジン出力の調速機構であるアクセルペダルを作業者が操作して、エンジンの回転数を任意に設定可能な構成がある。
【0003】
これに加え、圃場状態の変化を検知するとエンジン出力を変化させ、エンジンの回転数を増減させることにより、エンジンストールの発生を防止して、走行車体の走行姿勢を安定させる技術(例えば、特許文献1参照)が存在する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−162253号公報(第3頁、図10)。
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記発明の構成では、圃場状態が変化するたびに走行速度が大幅に加速または減速されるため、走行速度が変化すると機体が激しく揺れ、作業者の負担を増大させてしまう問題がある。
【0006】
また、走行速度が突然変化すると、例えば苗の植付作業を行なう場合には、苗を植え付けるタイミングが合わなくなる問題や、植付深さがばらつく問題が発生する。
アクセルペダルを踏んでエンジンの回転数を調節する場合は、作業者が常に細かい操作を行う必要があり、機体の進行方向が乱れたり、旋回タイミングがずれたりして、苗の植付精度が低下する問題があると共に、作業者の負担が増大してしまう問題がある。
【課題を解決するための手段】
【0007】
請求項1記載の発明は、左右の前輪(6,6)と左右の後輪(7,7)により圃場を走行する走行車体(9)にエンジン(8)を設け、該走行車体(9)の後部に圃場に苗を植え付ける植付部(5)を設けた作業車両において、走行する土壌の状態を検出する土壌センサ(10)を設け、該土壌センサ(10)が検出した土壌状態に合わせて前記エンジン(8)の燃料の噴射量を増減制御する構成としたことを特徴とする作業車両とする。
【0008】
請求項2記載の発明は、前記土壌センサ(10)の検出した土壌状態が「硬い」または「非常に柔らかい」であればエンジン(8)の燃料の噴射量を低下させ、この噴射量が現在の噴射量と同じまたは現在の噴射量未満である場合は現在の噴射量を維持する制御を行なう構成としたことを特徴とする請求項1記載の作業車両とする。
【0009】
請求項3記載の発明は、前記土壌センサ(10)の検出した土壌状態が「柔らかい」であればエンジン(8)の燃料の噴射量を上昇させ、この噴射量が現在の噴射量と同じまたは現在の噴射量以上である場合は現在の噴射量を維持する制御を行なう構成としたことを特徴とする請求項1記載の作業車両とする。
【0010】
請求項4記載の発明は、前記左右の後輪(7,7)をそれぞれ上下揺動自在に設け、該左右の後輪(7,7)の上下揺動による揺動差が設定値以上に大きくなると、前記土壌センサ(10)が検出した土壌状態に拘らず、エンジン(8)の出力を上げるように制御する構成としたことを特徴とする請求項1から3のいずれか1項に記載の作業車両とする。
【0011】
請求項5記載の発明は、前記土壌センサ(10)の下部に、土壌センサ(10)の検出面(11)に間欠的に接触して付着物を除去する清掃部材(12)を設けたことを特徴とする請求項1から4のいずれか1項に記載の作業車両とする。
【発明の効果】
【0012】
請求項1記載の発明の効果は、土壌センサ(10)で検出した作業中の土壌状態に合わせてエンジン(8)の燃料の噴射量を制御する構成としたことにより、走行姿勢の乱れにくい安定した土壌では燃料の噴射量を抑制して燃料の消費を少なくすることができるので、燃費が向上する。
【0013】
また、走行姿勢の乱れやすい不安定な土壌や、高負荷のかかる旋回を行なう圃場端では、エンジン(8)の燃料の噴射量を増加させることにより、エンジン(8)からより高い出力を得ることができるので、土壌面から受ける負荷によって作業走行中や旋回途中で機体が停止してしまうことや機体が大きく揺れることが防止され、作業能率が向上すると共に、作業者が不快感を覚えにくく、労力が軽減される。
【0014】
請求項2記載の発明の効果は、請求項1記載の発明の効果に加えて、土壌センサ(10)の検出した土壌が硬い、あるいは非常に柔らかく、泥等が前輪(6,6)及び後輪(7,7)の走行抵抗にならない場合、エンジン(8)の回転数が少なくても安定した走行が可能な土壌と判断し、エンジン(8)の燃料の噴射量を少なくする制御を行なうことにより、燃料の消費を少なくすることができるので、燃費が向上する。
【0015】
また、土壌センサ(10)が土壌状態を検出したときのエンジン(8)の燃料の噴射量が制御により変更される噴射量よりも少ない場合、エンジン(8)の燃料の噴射量を変更しない制御構成としたことにより、不必要にエンジン(8)の燃料の噴射量が増えることを防止できるので、燃費が向上する。
【0016】
請求項3記載の発明の効果は、請求項1記載の発明の効果に加えて、土壌センサ(10)の検出した土壌が柔らかく、泥等が前輪(6,6)及び後輪(7,7)の走行抵抗になり得る場合、エンジン(8)の回転数が多くなければ走行が不安定になる土壌と判断し、エンジン(8)の燃料の噴射を多くする制御を行なうことにより、エンジン(8)の回転数が増大して、安定した走行を行うことができ、作業能率や作業精度が向上する。
【0017】
また、土壌センサ(10)が土壌状態を検出したときのエンジン(8)の燃料の噴射量が制御により変更される噴射量よりも多い場合、エンジン(8)のの燃料の噴射量を変更しない制御構成としたことにより、不安定な土壌状態でも安定した走行が可能なエンジン(8)の回転数が維持されるので、走行姿勢を安定させることができ、作業性や操縦性が向上する。
【0018】
請求項4記載の発明の効果は、請求項1から3のいずれか1項に記載の発明の効果に加えて、独立して上下揺動自在な左右の後輪(7,7)の揺動差が一定以上になると、土壌センサ(10)が検出した土壌状態に拘らずエンジン(8)の出力を上げるように制御することにより、圃場に凹凸があっても機体の直進性が確保されるので、作業能率が向上する。
【0019】
請求項5記載の発明の効果は、請求項1から4のいずれか1項に記載の発明の効果に加えて、土壌センサ(10)の検知面に付着した泥土を、土壌センサ(10)の検知面(11)の下方を間欠的に通過する掃除部材(12)で定期的に取り除くことにより、土壌センサ(10)の検知面(11)が泥土で汚れて誤った結果を発信してしまうことが防止され、適切なエンジン(8)の燃料噴射量を確保することができるので、燃料の無駄が減少し、省エネ性が向上する。
【0020】
また、掃除部材(12)は土壌センサ(10)の検知面(11)の下方を間欠的に通過するので、土壌センサ(10)の検知を長時間に亘って妨げることがなく、土壌センサ(10)の検知精度が安定する。
【図面の簡単な説明】
【0021】
【図1】作業車両の側面図
【図2】作業車両の平面図
【図3】作業車両の一部植付装置部の平面図
【図4】作業車両のエンジン出力制御部のブロック図
【図5】作業車両のエンジン出力制御部のフローチャート
【図6】後輪の昇降位置を検出する位置センサの側面図
【図7】位置センサの制御フローチャート
【図8】土壌センサと掃除具の側面図
【図9】土壌センサと掃除具の要部拡大図
【発明を実施するための形態】
【0022】
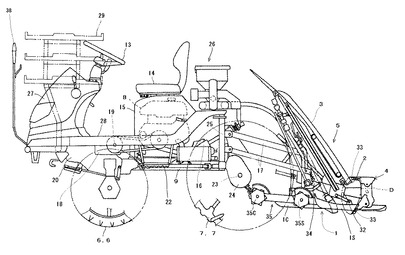
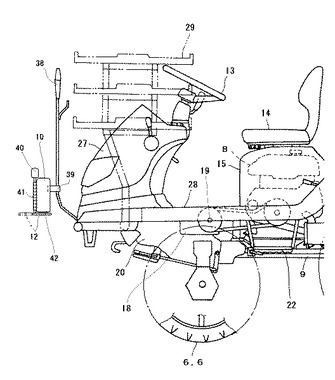
図1〜図9で示す苗移植機は、乗用四輪走行形態の走行車体9の後側に、リフトシリンダ16によって昇降されるリフトリンク17を介して、フロート1や、苗タンク3、植付装置4等から構成される植付部5を装着している。そして、前記走行車体9の運転席14下のエンジンカバー15内に燃料噴射量を自在に変更して回転数を変更可能なエンジン8を搭載し、該エンジン8から前側に配置の油圧無段変速装置18の入力軸19をベルト掛け連動している。
【0023】
該油圧無段変速装置18から下側のミッションケース20の連動機構を経て前記左右両側の前輪6,6を有する前輪軸21を連動駆動できる構成としている。また、このミッションケース20からは後輪連動軸22を介して、後輪7,7の後輪軸23を軸装のリヤアクスルハウジング24の連動機構を連動して、これら後輪7、又は後輪7と前輪6を伝動回転して走行できる形態である。
【0024】
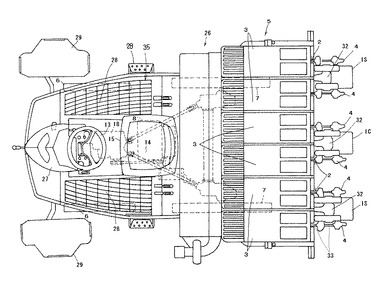
さらに、前記ミッションケース20の後部にはPTO軸を設けて、このPTO軸から車体9後部のリヤケース25の連動機構を連動し、このリヤケース25の連動機構から車体9後側上部に装着の施肥装置26や、前記植付部5等を連動する。前記運転席14、及びこの前方のステアリングハンドル13を有するステアリングポスト27の左右両側部に沿ってサイドフロア28を設け、この外側部に補助苗棚枠29を配置し、植付作業ではこの補助苗棚枠29に積載しておくマット苗を取出しながら後方の苗タンク3に補給することができる。
【0025】
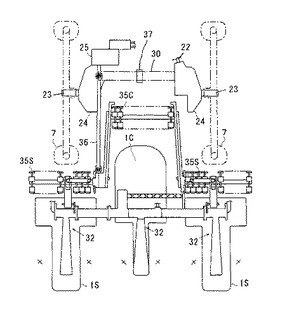
前記リヤアクスルハウジング24は、車体9後端部に対してセンタ軸37周りに上下揺動自在にして設けるアクスルケース30の左右両端部に取り付けられて、左右シーソ状に上下回動してローリング可能の形態で、後輪軸2や、後輪7の高さを昇降移動する。
【0026】
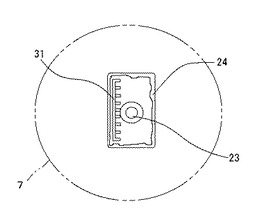
また、これらリヤアクスルハウジング24部の上下回動には、前記車体9部との間にスプリングダンパ等を設けることもできる。これら左右の後輪7が土壌耕盤部の凹凸面を踏むことによって、リヤアクスルハウジング24を上下回動して、車体9が昇降したり、左右へ傾斜したり、車体9後部が揺動が行われるものであるが、これらの揺動において、この後輪軸23の上下位置は、車体9側の昇降センサ31(図7参照)によって検出する。
【0027】
前記植付部5は、多条植形態の苗タンク3と、この苗タンク3の後側下端部に形成される苗取口2に作用する植付装置4と、これら苗タンク3と植付装置4を取付配置する植付伝動ケース32と、この植付伝動ケース32等を支持して土壌面を滑走均平するフロート1と等を有し、これら苗タンク3の上面に供給されるマット形態の苗を苗取口2へ繰出しながら、ダブルクランク形態に作動して側面視で楕円軌跡D状に植付作動する植付装置4の植付爪33によって、所定本数の苗を分離保持してフロート1で均平の土壌面へ植付けるものである。
【0028】
また、このフロート1は植付幅方向中央部に配置のセンタフロート1Cを有し、このセンタフロート1Cの上下動によって土壌深さを検出して、前記リフトシリンダ16を伸縮して、植付部5を昇降制御し、植付深さを一定に維持制御するように構成している。又、植付伝動ケース32のリフトリンク17に対する連結部はローリング自在の連結形態で、植付部5が左右へ傾斜すると、このローリング軸34の周りに回動されて、左右のサイドフロート1Sの滑走接地圧を均一化して、全植付幅にわたる植付深さを一定に維持する形態としている。
【0029】
このような植付部5のフロート1の前側に、代掻ロータ35を配置して、各フロート1で均平する土壌面を予め代掻するものである。センタフロート1Cの前側にセンタロータ35Cを配置し、サイドフロート1Sの前側にサイドロータ35Sを配置する。この代掻ロータ35は、前記リヤケース25から連動軸36を経て連動し、駆動回転することができる。又、代掻ロータ35は、植付部5の前側に吊下げられて、この植付部5と共に昇降されると共に、昇降機構の操作によってこの植付部5に対する高さを昇降して、代掻ロータ35の代掻位置を調節することができる。
【0030】
このとき、土壌面を滑走するフロート1を配置して、上面に供給されたマット苗を受けて苗取口2部へ繰り出す苗タンク3と、この苗取口2部の苗を分離保持して前記フロート1による均平跡の土壌面に植付ける植付装置4とを有して構成される植付部5を、操向自在の前輪6,6と後輪7,7を有してエンジン8により駆動走行する走行車体9の後部に装着した苗移植機において、走行土壌の状態を検出する土壌センサ10を設けて、この土壌センサ10による土壌状態の検出によって、前記エンジン8の燃料噴射量を増減制御する苗移植機の出力制御装置の構成とする。
【0031】
前記エンジン8によって後車輪7等を駆動して走行車体9を走行しながら、植付部5を連動して、苗タンク3に供給しているマット苗を苗取口2へ繰出し、この苗取口2の苗を植付装置4の連動駆動によって分離保持して、前記フロート1の滑走って均平される土壌面へ一定の深さに植付ける。このような植付作用中、前記苗移植機の走行領域の土壌面には土壌センサ10が検出作動して、苗を植付ける走行域の土壌の状態を検出している。
【0032】
この土壌センサ10の検出対象とする土壌状態は、例えば、土壌耕盤の深浅や、土壌の硬軟の度合、粘性の強弱等を検出の対象とし、これらの状態を検出する深度センサや、硬度センサ、土質センサ等が用いられる。いずれのセンサも、走行負荷の大小に関連するものであり、これらのセンサが負荷の増大を検出すると、エンジン8の燃料噴射量を増やし、出力を上げて走行駆動力を高くすと共に、走行負荷が減少すると、エンジン8の燃料噴射量を低減して、無駄な燃料消費を行わせない制御を行なう。
【0033】
また、前記左右の後輪7,7の上下揺動による揺動差が設定値以上に大きくなることによって、前記土壌センサ10による検出に拘らず、エンジン8の出力を上げるように制御する。
【0034】
前記苗移植機の植付走行において、左右の後輪7,7は駆動回転しながら土壌の硬、軟等の状態に応じて上下動しながら苗移植機の車体9を土壌面略一定位置に支持して走行させようとする。そして、左右の後輪7,7の踏圧回転する支持抵抗が異なると、これらの上下揺動差を異にして左右の後輪7,7の左右方向の段差を生ずることとなる。さらには、車体9や、植付部5等をも左右へ傾斜させることもある。
【0035】
このような場合、前記左右の後輪7,7の上下揺動差が予め設定している領域の設定値以上に大きくなったときには、エンジン8の燃料噴射量を多くして出力を上げる。このとき、前記土壌センサ10の検出による出力制御がおこなわれていることがあるが、この出力制御と重複して制御する形成とすることができる。
【0036】
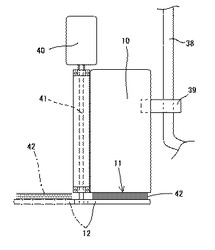
また、前記土壌センサ10を非接触形態とする場合は、この土壌に対向する検出面11に沿って間歇的に拭き作動する掃除具12を設ける。
前記のように土壌センサ10は、土壌状態を検出するものであるが、この土壌センサ10の検出面11が超音波や、光学センサの形態であるときは、土壌面との接近、乃至接触等によって、水分や汚れ等の付着が行われ易く、このようなときは、この検出面11を掃除具12の回動によって掃くことによって、汚れを除却することができ、正確で、精度の良い検出を行わせる。
【0037】
前記土壌センサ10は、図8のように車体9の前端部に、センタマーカ38の取付部を利用して取付けられる。この取付ブラケット39には、モータ40によって旋回される掃除具12としてのワイパーが設けられて、この掃除具12の下端部が、超音波を発信、受信する検出面11の下面を拭き掃除するように構成される。この掃除具12はブラシ状に上方へ突出の植毛ブラシ42を有して、回転軸41の周りに回転することによって、検出面11を拭き払うようにして掃除する。
【0038】
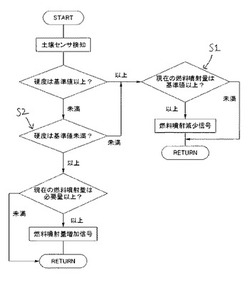
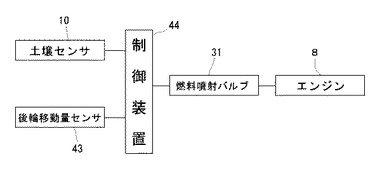
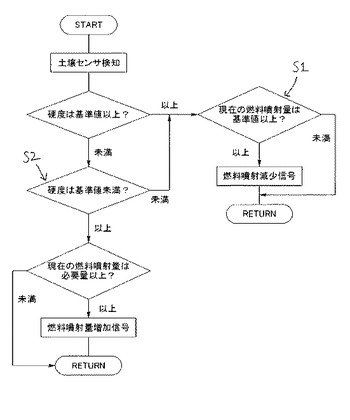
前記土壌センサ10を、土壌の硬、軟を検出する硬軟センサとして使用する場合は、図5のフローチャートのような作動で、燃料噴射バルブ43をコントローラ44からの出力して、エンジン8の回転を制御する。土壌耕盤が浅い場合や、硬いときは(ステップS1)、燃料噴射量をできるだけ少くし、土壌が軟弱で耕盤が深く走行抵抗力を増すときは(S2)、燃料噴射量を増して走行駆動力を高く維持させて、走行し易くする。
【0039】
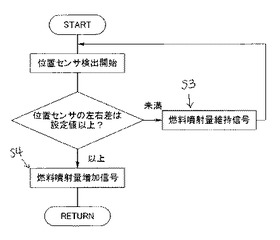
前記のようなエンジン8の出力制御において、前記後輪7の上下揺動位置を検出する位置センサ31によって、左右の後輪7の上下差が設定値以下に小さいときは(S3)、前記のような燃料噴射制御はそのまま維持されるが、前記位置センサ31による左右の後輪7の上下動差が設定値以上に大きくなると(S4)、これを過負荷走行状態として、燃料噴射バルブ31を開いて、前記土壌センサ10による制御に拘らず燃料噴射量を多くして、エンジン8の出力制御を行う。
【0040】
このような位置センサ31としては、車体9の左右方向の傾斜角を検出する左右傾斜センサや、車体31を左右水平状の姿勢に維持制御するためのローリングセンサ等を用いることもできる。
【0041】
前記硬軟センサとしての土壌センサ10は、取付位置を代掻ロータ35の後方部に設けることが多いが、センタロータ35Cの前方位置、又は車体9の前端部に配置して、これら代掻ロータ35等による泥流の影響を受け難くして、正確に安定した土壌状態を検出するように構成している。
【0042】
また、従来の硬軟センサとしては、車速の影響を考慮しないで運転者による操作にまかせていた。この硬軟センサが安定しない場合は、油圧無段変速装置18と連動して、車速を自動減速制御するように構成することもできる。
【符号の説明】
【0043】
5 植付部
6 前輪
7 後輪
8 エンジン
9 走行車体
10 土壌センサ
11 検出面
12 掃除具
【技術分野】
【0001】
本件発明は、作業場所の土壌状態を検出し、検出した土壌状態に合わせてエンジンの燃料噴射量を変更して出力を自動調節し、土壌状態に関わらず安定した走行が可能な作業車両に関するものである。
【背景技術】
【0002】
従来、耕盤の深い圃場や、粘土質の圃場のように走行負荷の極めて大きい圃場での作業では、泥が車輪を動きを妨げる抵抗によるエンジンストールが発生しやすいため、エンジン出力の調速機構であるアクセルペダルを作業者が操作して、エンジンの回転数を任意に設定可能な構成がある。
【0003】
これに加え、圃場状態の変化を検知するとエンジン出力を変化させ、エンジンの回転数を増減させることにより、エンジンストールの発生を防止して、走行車体の走行姿勢を安定させる技術(例えば、特許文献1参照)が存在する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−162253号公報(第3頁、図10)。
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記発明の構成では、圃場状態が変化するたびに走行速度が大幅に加速または減速されるため、走行速度が変化すると機体が激しく揺れ、作業者の負担を増大させてしまう問題がある。
【0006】
また、走行速度が突然変化すると、例えば苗の植付作業を行なう場合には、苗を植え付けるタイミングが合わなくなる問題や、植付深さがばらつく問題が発生する。
アクセルペダルを踏んでエンジンの回転数を調節する場合は、作業者が常に細かい操作を行う必要があり、機体の進行方向が乱れたり、旋回タイミングがずれたりして、苗の植付精度が低下する問題があると共に、作業者の負担が増大してしまう問題がある。
【課題を解決するための手段】
【0007】
請求項1記載の発明は、左右の前輪(6,6)と左右の後輪(7,7)により圃場を走行する走行車体(9)にエンジン(8)を設け、該走行車体(9)の後部に圃場に苗を植え付ける植付部(5)を設けた作業車両において、走行する土壌の状態を検出する土壌センサ(10)を設け、該土壌センサ(10)が検出した土壌状態に合わせて前記エンジン(8)の燃料の噴射量を増減制御する構成としたことを特徴とする作業車両とする。
【0008】
請求項2記載の発明は、前記土壌センサ(10)の検出した土壌状態が「硬い」または「非常に柔らかい」であればエンジン(8)の燃料の噴射量を低下させ、この噴射量が現在の噴射量と同じまたは現在の噴射量未満である場合は現在の噴射量を維持する制御を行なう構成としたことを特徴とする請求項1記載の作業車両とする。
【0009】
請求項3記載の発明は、前記土壌センサ(10)の検出した土壌状態が「柔らかい」であればエンジン(8)の燃料の噴射量を上昇させ、この噴射量が現在の噴射量と同じまたは現在の噴射量以上である場合は現在の噴射量を維持する制御を行なう構成としたことを特徴とする請求項1記載の作業車両とする。
【0010】
請求項4記載の発明は、前記左右の後輪(7,7)をそれぞれ上下揺動自在に設け、該左右の後輪(7,7)の上下揺動による揺動差が設定値以上に大きくなると、前記土壌センサ(10)が検出した土壌状態に拘らず、エンジン(8)の出力を上げるように制御する構成としたことを特徴とする請求項1から3のいずれか1項に記載の作業車両とする。
【0011】
請求項5記載の発明は、前記土壌センサ(10)の下部に、土壌センサ(10)の検出面(11)に間欠的に接触して付着物を除去する清掃部材(12)を設けたことを特徴とする請求項1から4のいずれか1項に記載の作業車両とする。
【発明の効果】
【0012】
請求項1記載の発明の効果は、土壌センサ(10)で検出した作業中の土壌状態に合わせてエンジン(8)の燃料の噴射量を制御する構成としたことにより、走行姿勢の乱れにくい安定した土壌では燃料の噴射量を抑制して燃料の消費を少なくすることができるので、燃費が向上する。
【0013】
また、走行姿勢の乱れやすい不安定な土壌や、高負荷のかかる旋回を行なう圃場端では、エンジン(8)の燃料の噴射量を増加させることにより、エンジン(8)からより高い出力を得ることができるので、土壌面から受ける負荷によって作業走行中や旋回途中で機体が停止してしまうことや機体が大きく揺れることが防止され、作業能率が向上すると共に、作業者が不快感を覚えにくく、労力が軽減される。
【0014】
請求項2記載の発明の効果は、請求項1記載の発明の効果に加えて、土壌センサ(10)の検出した土壌が硬い、あるいは非常に柔らかく、泥等が前輪(6,6)及び後輪(7,7)の走行抵抗にならない場合、エンジン(8)の回転数が少なくても安定した走行が可能な土壌と判断し、エンジン(8)の燃料の噴射量を少なくする制御を行なうことにより、燃料の消費を少なくすることができるので、燃費が向上する。
【0015】
また、土壌センサ(10)が土壌状態を検出したときのエンジン(8)の燃料の噴射量が制御により変更される噴射量よりも少ない場合、エンジン(8)の燃料の噴射量を変更しない制御構成としたことにより、不必要にエンジン(8)の燃料の噴射量が増えることを防止できるので、燃費が向上する。
【0016】
請求項3記載の発明の効果は、請求項1記載の発明の効果に加えて、土壌センサ(10)の検出した土壌が柔らかく、泥等が前輪(6,6)及び後輪(7,7)の走行抵抗になり得る場合、エンジン(8)の回転数が多くなければ走行が不安定になる土壌と判断し、エンジン(8)の燃料の噴射を多くする制御を行なうことにより、エンジン(8)の回転数が増大して、安定した走行を行うことができ、作業能率や作業精度が向上する。
【0017】
また、土壌センサ(10)が土壌状態を検出したときのエンジン(8)の燃料の噴射量が制御により変更される噴射量よりも多い場合、エンジン(8)のの燃料の噴射量を変更しない制御構成としたことにより、不安定な土壌状態でも安定した走行が可能なエンジン(8)の回転数が維持されるので、走行姿勢を安定させることができ、作業性や操縦性が向上する。
【0018】
請求項4記載の発明の効果は、請求項1から3のいずれか1項に記載の発明の効果に加えて、独立して上下揺動自在な左右の後輪(7,7)の揺動差が一定以上になると、土壌センサ(10)が検出した土壌状態に拘らずエンジン(8)の出力を上げるように制御することにより、圃場に凹凸があっても機体の直進性が確保されるので、作業能率が向上する。
【0019】
請求項5記載の発明の効果は、請求項1から4のいずれか1項に記載の発明の効果に加えて、土壌センサ(10)の検知面に付着した泥土を、土壌センサ(10)の検知面(11)の下方を間欠的に通過する掃除部材(12)で定期的に取り除くことにより、土壌センサ(10)の検知面(11)が泥土で汚れて誤った結果を発信してしまうことが防止され、適切なエンジン(8)の燃料噴射量を確保することができるので、燃料の無駄が減少し、省エネ性が向上する。
【0020】
また、掃除部材(12)は土壌センサ(10)の検知面(11)の下方を間欠的に通過するので、土壌センサ(10)の検知を長時間に亘って妨げることがなく、土壌センサ(10)の検知精度が安定する。
【図面の簡単な説明】
【0021】
【図1】作業車両の側面図
【図2】作業車両の平面図
【図3】作業車両の一部植付装置部の平面図
【図4】作業車両のエンジン出力制御部のブロック図
【図5】作業車両のエンジン出力制御部のフローチャート
【図6】後輪の昇降位置を検出する位置センサの側面図
【図7】位置センサの制御フローチャート
【図8】土壌センサと掃除具の側面図
【図9】土壌センサと掃除具の要部拡大図
【発明を実施するための形態】
【0022】
図1〜図9で示す苗移植機は、乗用四輪走行形態の走行車体9の後側に、リフトシリンダ16によって昇降されるリフトリンク17を介して、フロート1や、苗タンク3、植付装置4等から構成される植付部5を装着している。そして、前記走行車体9の運転席14下のエンジンカバー15内に燃料噴射量を自在に変更して回転数を変更可能なエンジン8を搭載し、該エンジン8から前側に配置の油圧無段変速装置18の入力軸19をベルト掛け連動している。
【0023】
該油圧無段変速装置18から下側のミッションケース20の連動機構を経て前記左右両側の前輪6,6を有する前輪軸21を連動駆動できる構成としている。また、このミッションケース20からは後輪連動軸22を介して、後輪7,7の後輪軸23を軸装のリヤアクスルハウジング24の連動機構を連動して、これら後輪7、又は後輪7と前輪6を伝動回転して走行できる形態である。
【0024】
さらに、前記ミッションケース20の後部にはPTO軸を設けて、このPTO軸から車体9後部のリヤケース25の連動機構を連動し、このリヤケース25の連動機構から車体9後側上部に装着の施肥装置26や、前記植付部5等を連動する。前記運転席14、及びこの前方のステアリングハンドル13を有するステアリングポスト27の左右両側部に沿ってサイドフロア28を設け、この外側部に補助苗棚枠29を配置し、植付作業ではこの補助苗棚枠29に積載しておくマット苗を取出しながら後方の苗タンク3に補給することができる。
【0025】
前記リヤアクスルハウジング24は、車体9後端部に対してセンタ軸37周りに上下揺動自在にして設けるアクスルケース30の左右両端部に取り付けられて、左右シーソ状に上下回動してローリング可能の形態で、後輪軸2や、後輪7の高さを昇降移動する。
【0026】
また、これらリヤアクスルハウジング24部の上下回動には、前記車体9部との間にスプリングダンパ等を設けることもできる。これら左右の後輪7が土壌耕盤部の凹凸面を踏むことによって、リヤアクスルハウジング24を上下回動して、車体9が昇降したり、左右へ傾斜したり、車体9後部が揺動が行われるものであるが、これらの揺動において、この後輪軸23の上下位置は、車体9側の昇降センサ31(図7参照)によって検出する。
【0027】
前記植付部5は、多条植形態の苗タンク3と、この苗タンク3の後側下端部に形成される苗取口2に作用する植付装置4と、これら苗タンク3と植付装置4を取付配置する植付伝動ケース32と、この植付伝動ケース32等を支持して土壌面を滑走均平するフロート1と等を有し、これら苗タンク3の上面に供給されるマット形態の苗を苗取口2へ繰出しながら、ダブルクランク形態に作動して側面視で楕円軌跡D状に植付作動する植付装置4の植付爪33によって、所定本数の苗を分離保持してフロート1で均平の土壌面へ植付けるものである。
【0028】
また、このフロート1は植付幅方向中央部に配置のセンタフロート1Cを有し、このセンタフロート1Cの上下動によって土壌深さを検出して、前記リフトシリンダ16を伸縮して、植付部5を昇降制御し、植付深さを一定に維持制御するように構成している。又、植付伝動ケース32のリフトリンク17に対する連結部はローリング自在の連結形態で、植付部5が左右へ傾斜すると、このローリング軸34の周りに回動されて、左右のサイドフロート1Sの滑走接地圧を均一化して、全植付幅にわたる植付深さを一定に維持する形態としている。
【0029】
このような植付部5のフロート1の前側に、代掻ロータ35を配置して、各フロート1で均平する土壌面を予め代掻するものである。センタフロート1Cの前側にセンタロータ35Cを配置し、サイドフロート1Sの前側にサイドロータ35Sを配置する。この代掻ロータ35は、前記リヤケース25から連動軸36を経て連動し、駆動回転することができる。又、代掻ロータ35は、植付部5の前側に吊下げられて、この植付部5と共に昇降されると共に、昇降機構の操作によってこの植付部5に対する高さを昇降して、代掻ロータ35の代掻位置を調節することができる。
【0030】
このとき、土壌面を滑走するフロート1を配置して、上面に供給されたマット苗を受けて苗取口2部へ繰り出す苗タンク3と、この苗取口2部の苗を分離保持して前記フロート1による均平跡の土壌面に植付ける植付装置4とを有して構成される植付部5を、操向自在の前輪6,6と後輪7,7を有してエンジン8により駆動走行する走行車体9の後部に装着した苗移植機において、走行土壌の状態を検出する土壌センサ10を設けて、この土壌センサ10による土壌状態の検出によって、前記エンジン8の燃料噴射量を増減制御する苗移植機の出力制御装置の構成とする。
【0031】
前記エンジン8によって後車輪7等を駆動して走行車体9を走行しながら、植付部5を連動して、苗タンク3に供給しているマット苗を苗取口2へ繰出し、この苗取口2の苗を植付装置4の連動駆動によって分離保持して、前記フロート1の滑走って均平される土壌面へ一定の深さに植付ける。このような植付作用中、前記苗移植機の走行領域の土壌面には土壌センサ10が検出作動して、苗を植付ける走行域の土壌の状態を検出している。
【0032】
この土壌センサ10の検出対象とする土壌状態は、例えば、土壌耕盤の深浅や、土壌の硬軟の度合、粘性の強弱等を検出の対象とし、これらの状態を検出する深度センサや、硬度センサ、土質センサ等が用いられる。いずれのセンサも、走行負荷の大小に関連するものであり、これらのセンサが負荷の増大を検出すると、エンジン8の燃料噴射量を増やし、出力を上げて走行駆動力を高くすと共に、走行負荷が減少すると、エンジン8の燃料噴射量を低減して、無駄な燃料消費を行わせない制御を行なう。
【0033】
また、前記左右の後輪7,7の上下揺動による揺動差が設定値以上に大きくなることによって、前記土壌センサ10による検出に拘らず、エンジン8の出力を上げるように制御する。
【0034】
前記苗移植機の植付走行において、左右の後輪7,7は駆動回転しながら土壌の硬、軟等の状態に応じて上下動しながら苗移植機の車体9を土壌面略一定位置に支持して走行させようとする。そして、左右の後輪7,7の踏圧回転する支持抵抗が異なると、これらの上下揺動差を異にして左右の後輪7,7の左右方向の段差を生ずることとなる。さらには、車体9や、植付部5等をも左右へ傾斜させることもある。
【0035】
このような場合、前記左右の後輪7,7の上下揺動差が予め設定している領域の設定値以上に大きくなったときには、エンジン8の燃料噴射量を多くして出力を上げる。このとき、前記土壌センサ10の検出による出力制御がおこなわれていることがあるが、この出力制御と重複して制御する形成とすることができる。
【0036】
また、前記土壌センサ10を非接触形態とする場合は、この土壌に対向する検出面11に沿って間歇的に拭き作動する掃除具12を設ける。
前記のように土壌センサ10は、土壌状態を検出するものであるが、この土壌センサ10の検出面11が超音波や、光学センサの形態であるときは、土壌面との接近、乃至接触等によって、水分や汚れ等の付着が行われ易く、このようなときは、この検出面11を掃除具12の回動によって掃くことによって、汚れを除却することができ、正確で、精度の良い検出を行わせる。
【0037】
前記土壌センサ10は、図8のように車体9の前端部に、センタマーカ38の取付部を利用して取付けられる。この取付ブラケット39には、モータ40によって旋回される掃除具12としてのワイパーが設けられて、この掃除具12の下端部が、超音波を発信、受信する検出面11の下面を拭き掃除するように構成される。この掃除具12はブラシ状に上方へ突出の植毛ブラシ42を有して、回転軸41の周りに回転することによって、検出面11を拭き払うようにして掃除する。
【0038】
前記土壌センサ10を、土壌の硬、軟を検出する硬軟センサとして使用する場合は、図5のフローチャートのような作動で、燃料噴射バルブ43をコントローラ44からの出力して、エンジン8の回転を制御する。土壌耕盤が浅い場合や、硬いときは(ステップS1)、燃料噴射量をできるだけ少くし、土壌が軟弱で耕盤が深く走行抵抗力を増すときは(S2)、燃料噴射量を増して走行駆動力を高く維持させて、走行し易くする。
【0039】
前記のようなエンジン8の出力制御において、前記後輪7の上下揺動位置を検出する位置センサ31によって、左右の後輪7の上下差が設定値以下に小さいときは(S3)、前記のような燃料噴射制御はそのまま維持されるが、前記位置センサ31による左右の後輪7の上下動差が設定値以上に大きくなると(S4)、これを過負荷走行状態として、燃料噴射バルブ31を開いて、前記土壌センサ10による制御に拘らず燃料噴射量を多くして、エンジン8の出力制御を行う。
【0040】
このような位置センサ31としては、車体9の左右方向の傾斜角を検出する左右傾斜センサや、車体31を左右水平状の姿勢に維持制御するためのローリングセンサ等を用いることもできる。
【0041】
前記硬軟センサとしての土壌センサ10は、取付位置を代掻ロータ35の後方部に設けることが多いが、センタロータ35Cの前方位置、又は車体9の前端部に配置して、これら代掻ロータ35等による泥流の影響を受け難くして、正確に安定した土壌状態を検出するように構成している。
【0042】
また、従来の硬軟センサとしては、車速の影響を考慮しないで運転者による操作にまかせていた。この硬軟センサが安定しない場合は、油圧無段変速装置18と連動して、車速を自動減速制御するように構成することもできる。
【符号の説明】
【0043】
5 植付部
6 前輪
7 後輪
8 エンジン
9 走行車体
10 土壌センサ
11 検出面
12 掃除具
【特許請求の範囲】
【請求項1】
左右の前輪(6,6)と左右の後輪(7,7)により圃場を走行する走行車体(9)にエンジン(8)を設け、該走行車体(9)の後部に圃場に苗を植え付ける植付部(5)を設けた作業車両において、
走行する土壌の状態を検出する土壌センサ(10)を設け、該土壌センサ(10)が検出した土壌状態に合わせて前記エンジン(8)の燃料の噴射量を増減制御する構成としたことを特徴とする作業車両。
【請求項2】
前記土壌センサ(10)の検出した土壌状態が「硬い」または「非常に柔らかい」であればエンジン(8)の燃料の噴射量を低下させ、この噴射量が現在の噴射量と同じまたは現在の噴射量未満である場合は現在の噴射量を維持する制御を行なう構成としたことを特徴とする請求項1記載の作業車両。
【請求項3】
前記土壌センサ(10)の検出した土壌状態が「柔らかい」であればエンジン(8)の燃料の噴射量を上昇させ、この噴射量が現在の噴射量と同じまたは現在の噴射量以上である場合は現在の噴射量を維持する制御を行なう構成としたことを特徴とする請求項1記載の作業車両。
【請求項4】
前記左右の後輪(7,7)をそれぞれ上下揺動自在に設け、該左右の後輪(7,7)の上下揺動による揺動差が設定値以上に大きくなると、前記土壌センサ(10)が検出した土壌状態に拘らず、エンジン(8)の出力を上げるように制御する構成としたことを特徴とする請求項1から3のいずれか1項に記載の作業車両。
【請求項5】
前記土壌センサ(10)の下部に、土壌センサ(10)の検出面(11)に間欠的に接触して付着物を除去する清掃部材(12)を設けたことを特徴とする請求項1から4のいずれか1項に記載の作業車両。
【請求項1】
左右の前輪(6,6)と左右の後輪(7,7)により圃場を走行する走行車体(9)にエンジン(8)を設け、該走行車体(9)の後部に圃場に苗を植え付ける植付部(5)を設けた作業車両において、
走行する土壌の状態を検出する土壌センサ(10)を設け、該土壌センサ(10)が検出した土壌状態に合わせて前記エンジン(8)の燃料の噴射量を増減制御する構成としたことを特徴とする作業車両。
【請求項2】
前記土壌センサ(10)の検出した土壌状態が「硬い」または「非常に柔らかい」であればエンジン(8)の燃料の噴射量を低下させ、この噴射量が現在の噴射量と同じまたは現在の噴射量未満である場合は現在の噴射量を維持する制御を行なう構成としたことを特徴とする請求項1記載の作業車両。
【請求項3】
前記土壌センサ(10)の検出した土壌状態が「柔らかい」であればエンジン(8)の燃料の噴射量を上昇させ、この噴射量が現在の噴射量と同じまたは現在の噴射量以上である場合は現在の噴射量を維持する制御を行なう構成としたことを特徴とする請求項1記載の作業車両。
【請求項4】
前記左右の後輪(7,7)をそれぞれ上下揺動自在に設け、該左右の後輪(7,7)の上下揺動による揺動差が設定値以上に大きくなると、前記土壌センサ(10)が検出した土壌状態に拘らず、エンジン(8)の出力を上げるように制御する構成としたことを特徴とする請求項1から3のいずれか1項に記載の作業車両。
【請求項5】
前記土壌センサ(10)の下部に、土壌センサ(10)の検出面(11)に間欠的に接触して付着物を除去する清掃部材(12)を設けたことを特徴とする請求項1から4のいずれか1項に記載の作業車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−50354(P2012−50354A)
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願番号】特願2010−193713(P2010−193713)
【出願日】平成22年8月31日(2010.8.31)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願日】平成22年8月31日(2010.8.31)
【出願人】(000000125)井関農機株式会社 (3,813)
【Fターム(参考)】
[ Back to top ]